
無線通信装置
【課題】GPS衛星のサーチ時間を短縮し、測位時間をより短縮することができる。
【解決手段】指示部207は、GPS衛星から送信される航法メッセージの取得を周辺端末に対して指示する。通信部204は、周辺端末が取得した航法メッセージを当該周辺端末から取得する。測位演算部209は、周辺端末から取得した航法メッセージを用いて測位演算を行う。
【解決手段】指示部207は、GPS衛星から送信される航法メッセージの取得を周辺端末に対して指示する。通信部204は、周辺端末が取得した航法メッセージを当該周辺端末から取得する。測位演算部209は、周辺端末から取得した航法メッセージを用いて測位演算を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、無線通信装置に関する。
【背景技術】
【0002】
近年、GPS受信機を具備したモバイル機器が市場に増えてきており、ユーザが手軽に現在位置情報を取得し、位置情報を写真に付与しその写真を電子地図上に配置したり、あるいは現在位置を友達に伝えたりなど様々なアプリケーションやサービスが展開している。
【0003】
GPS衛星を使った測位システムは、複数のGPS衛星から送出される信号を受信し、信号に含まれるGPS衛星の航法メッセージを基にGPS受信機の位置を算出している。この航法メッセージにはGPS衛星の軌道情報が含まれている。この軌道情報を用いることで、GPS受信機は現在GPS受信機の上空にどのGPS衛星が飛んでいるか求めることができる。
【0004】
初めてGPS測位を行う時や以前GPS測位を実施した場所と大幅に異なる場所、あるいは最後に測位を終えてから大幅に時間を経過しているような場合、GPS受信機は適切な航法メッセージを持っていない。従って、GPS受信機は、どのGPS衛星が上空を飛んでいるのか分からないため、全てのGPS衛星に対して総当りでサーチをする必要がある。一般的にこの状態からの測位開始をコールドスタートと呼び、測位に大幅な時間を要する。
【0005】
GPS受信機は、一度測位を行うとGPS衛星の航法メッセージをGPS受信機内に記録する。これにより、GPS受信機は、次回の測位時には、記録した航法メッセージを用いてどのGPS衛星が上空を飛んでいるのか求めることができるため、測位に掛かる時間を大幅に短縮することができる。しかしながら、GPS受信機が適切な航法メッセージをGPS受信機内に記録していないという状態はしばしば発生する。例えば、GPS受信機を購入後、初回に起動した時や、海外へ移動しGPS受信機を使用する時などである。このような条件の時、測位を完了するために数分間を要する場合がある。
【0006】
測位時間を短縮する方法として、測位機能以外の機能が動作することによる不要輻射電波を抑えることで測位に要する時間を短縮する方法(例えば、特許文献1参照)や、ホットスタートやコールドスタートでの起動時の制限時間の設定値を起動モードに応じて適切に設定することで総合的な測位に要する時間を短縮する方法(例えば、特許文献2参照)が知られている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2004−61336号公報
【特許文献2】特開2003−344523号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
GPS衛星からの信号電波はC/Aコードと呼ばれる各GPS衛星固有のコードによって変調されており、GPS受信機側はGPS衛星からの信号の中に含まれるC/Aコードを見つけ出し、信号を復調している。C/Aコードは周波数1.023MHzで1023チップを1周期として繰り返すもので、現在稼動している32個のGPS衛星にそれぞれ固有の値が割り当てられている。
【0009】
GPS受信機は、初回起動時や以前測位を実施した位置から遠く離れた位置へ移動し、改めて測位を開始する時など、GPS衛星の軌道情報を持っていない場合、GPS衛星が現在どのあたりを飛んでいるのか推定することができないため、GPS衛星から受信した信号がどのGPS衛星から送出された電波なのかを見つけるために32個のGPS衛星に割り当てられたC/Aコードを1位相毎ずらしながら総当りで検出する必要がある。
【0010】
また、GPS衛星から送出される信号をサーチするためには電波の受信に適した場所であるに越したことはないが、実際にユーザがGPS受信機を使い測位を行う場所が必ずしも電波の受信に適した場所であるとは限らない。このため、GPS衛星が送出する信号の受信条件によっては、GPS受信機がGPS衛星をサーチするために大幅な時間を要する。
【0011】
GPS衛星から送出される航法メッセージは5サブフレームで1フレームが形成され、1フレームをデータの単位として送出している。GPS衛星から送出される信号の転送速度は50bpsであるため、GPS受信機は1フレームの航法メッセージの受信に30秒の時間を要する。更に、GPS受信機は、3次元測位を行うためには4つ以上のGPS衛星の航法メッセージを受信できなければ演算を行うことができないため、即位演算が行えるようになるまで更に大幅な時間を要することになる。ユーザが持ち歩くモバイル機器、特にデジタルカメラのように電源投入後に即撮影を行い、撮影地点の位置情報を記録するような使い方では、この測位に掛かる時間は許容される範囲にない。特許文献1及び特許文献2に記載の技術では、GPS測位の中で最も時間が掛かるGPS衛星のサーチに関して時間の短縮はできないという問題がある。また、航法メッセージの受信状態が悪い場合、GPS受信機は測位自体を行うことができないという問題がある。
【0012】
本発明は上記課題を解決するためになされたものであり、GPS衛星のサーチ時間を短縮し、測位時間をより短縮することができる無線通信装置を提供することを目的とする。
【課題を解決するための手段】
【0013】
本発明は、GPS衛星から送信される航法メッセージの取得を周辺端末に対して指示する指示部と、前記周辺端末が取得した前記航法メッセージを当該周辺端末から取得する取得部と、前記周辺端末から取得した前記航法メッセージを用いて測位演算を行う演算部と、を有することを特徴とする無線通信装置である。
【0014】
また、本発明は、複数の前記GPS衛星の中から前記周辺端末に割り当てる前記GPS衛星を決定する決定部を更に有し、前記指示部は、前記GPS衛星を割り当てた前記周辺端末に対して当該GPS衛星から送信される前記航法メッセージの取得を指示することを特徴とする無線通信装置である。
【0015】
また、本発明は、自装置と時刻の同期を取るための同期メッセージを前記周辺端末に対して送信する通信部を更に有することを特徴とする無線通信装置である。
【0016】
また、本発明の無線通信装置において、前記通信部は、自装置と前記周辺端末との間のデータ伝送にかかる時間を示す情報を含む前記同期メッセージを送信することを特徴とする。
【0017】
また、本発明は、前記GPS衛星から前記航法メッセージを受信する受信部を更に有し、前記演算部は、前記取得部が取得した前記航法メッセージと前記受信部が受信した前記航法メッセージとを用いて前記測位演算を行うことを特徴とする無線通信装置である。
【0018】
また、本発明の無線通信装置において、前記指示部は、複数の前記周辺端末に対して前記指示を行い、前記取得部は、複数の前記周辺端末から前記航法メッセージを取得し、前記演算部は、複数の前記周辺端末から取得した前記航法メッセージを用いて測位演算を行うことを特徴とする。
【0019】
また、本発明は、無線通信を用いて自装置の周囲に存在する前記周辺端末を検索し特定する検索部を更に有し、前記指示部は、前記検索部が特定した前記周辺端末に対して前記GPS衛星から送信される前記航法メッセージの取得を指示することを特徴とする無線通信装置である。
【発明の効果】
【0020】
本発明によれば、指示部は、GPS衛星から送信される航法メッセージの取得を周辺端末に対して指示する。また、取得部は、周辺端末が取得した航法メッセージを当該周辺端末から取得する。また、演算部は、周辺端末から取得した航法メッセージを用いて測位演算を行う。この構成により、周辺端末が取得した航法メッセーを用いて測位演算を行うことができる。従って、GPS衛星のサーチ時間を短縮し、測位時間をより短縮することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施形態における無線通信装置とGPS衛星とがデータを送受信する際の例を示した概略図である。
【図2】本実施形態における無線通信装置の構成を示したブロック図である。
【図3】本実施形態において、起動動作を行う無線通信装置の動作手順を示したフローチャートである。
【図4】本実施形態において、航法メッセージを送信する無線通信装置の動作手順を示したフローチャートである。
【図5】本実施形態において、起動動作を行う無線通信装置の時刻同期処理の処理手順を示したフローチャートである。
【図6】本実施形態において、航法メッセージを送信する無線通信装置の時刻同期処理の処理手順を示したフローチャートである。
【図7】本実施形態における無線通信装置の間でのメッセージの流れを示したシーケンス図である。
【図8】本実施形態において、時刻同期処理における無線通信装置の間でのメッセージの流れを示したシーケンス図である。
【発明を実施するための形態】
【0022】
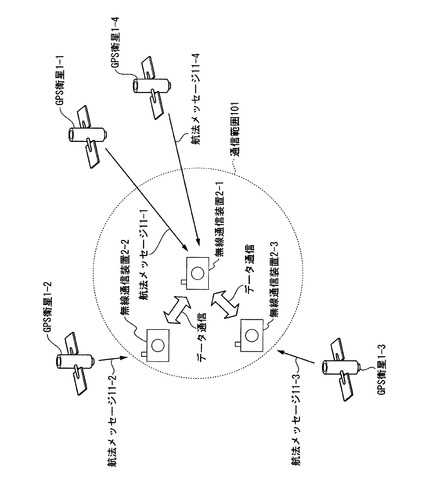
以下、本発明の一実施形態について図面を参照して説明する。図1は、本実施形態における無線通信装置とGPS衛星とがデータを送受信する際の例を示した概略図である。GPS衛星は地上2万kmの6つの軌道上に4機ずつ配置されている。図示する例では複数のGPS衛星1のうち、4つのGPS衛星1−1〜1−4が示されている。これらのGPS衛星1−1〜1−4は1575.42MHzの周波数帯を使用し、地上に対して航法メッセージ11−1〜11−4を送出している。
【0023】
また、図示する例では無線通信装置2として、3台の無線通信装置2−1〜2−3が示されている。無線通信装置2は、例えばGPS機能付のデジタルカメラである。無線通信装置2−1〜2−3は、自身の現在位置を測位するためにはGPS衛星1−1〜1−4を捕捉し、GPS衛星1−1〜1−4から送出されている航法メッセージ11−1〜11−4を取得する。そして、無線通信装置2−1〜2−3は、取得した航法メッセージ11−1〜11−4を用いて測位演算を行う。
【0024】
本実施形態では無線通信装置2−1〜2−3は、GPS受信部だけではなく、例えば無線LANなどの他の通信手段を具備している。また、無線通信装置2−1は、初めて自装置の現在位置の測位を開始する時、GPS受信部以外の通信方式で、この通信方式の通信範囲101に存在する無線通信装置2−2〜2−3(周辺端末)を検索して特定する。そして、無線通信装置2−1は、特定した無線通信装置2−2〜2−3と自装置のうち、どの装置がどのGPS衛星1−1〜1−4の補足を行うか決定する。その後、無線通信装置2−1は、無線通信装置2−2〜2−3に対して、決定したGPS衛星1−1〜1−4の航法メッセージ11−1〜11−4の取得を指示するメッセージを送信する。
【0025】
無線通信装置2−1〜2−3は、無線通信装置2−1が決定したGPS衛星1−1〜1−4の航法メッセージ11−1〜11−4を取得する。そして、無線通信装置2−2,2−3は取得した航法メッセージ11−1〜11−4を無線通信装置2−1に対して送信する。無線通信装置2−1は、自装置と無線通信装置2−2〜2−3とが取得したGPS衛星1−1〜1−4の航法メッセージ11−1〜11−4を用いて測位演算を行う。なお、この場合の無線通信装置2−1を、起動動作を行う無線通信装置2とする。
【0026】
例えば、起動動作を行う無線通信装置2−1は、自無線通信装置2−1がGPS衛星1−1,1−4を補足し、無線通信装置2−2がGPS衛星1−2を補足し、無線通信装置2−3がGPS衛星1−3を補足すると決定する。そして、無線通信装置2−1は、GPS衛星1−2を補足して航法メッセージ11−2の取得を指示するメッセージを無線通信装置2−2に対して送信し、GPS衛星1−3を補足して航法メッセージ11−3の取得を指示するメッセージを無線通信装置2−3に対して送信する。無線通信装置2−1は、GPS衛星1−1,1−4を補足して航法メッセージ11−1,11−4を取得する。また、無線通信装置2−2は、GPS衛星1−2を補足して航法メッセージ11−2を取得し、取得した航法メッセージ11−2を無線通信装置2−1に対して送信する。また、無線通信装置2−3は、GPS衛星1−3を補足して航法メッセージ11−3を取得し、取得した航法メッセージ11−3を無線通信装置2−1に対して送信する。その後、無線通信装置2−1は、航法メッセージ11−1〜11−4を用いて測位演算を行う。
【0027】
上述するように、GPS衛星1−1〜1−4が送出す航法メッセージ11−1〜11−4を複数の無線通信装置2−1〜2−3で分担して取得し、取得した航法メッセージ11−1〜11−4を用いて測位演算を行うことで、1台の無線通信装置2のみで航法メッセージ11−1〜11−4を取得し測位演算するよりも、測位に掛かる時間をより短縮することができる。
【0028】
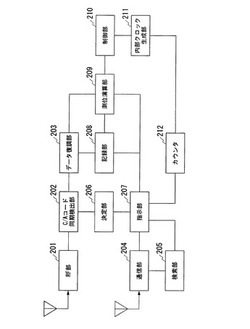
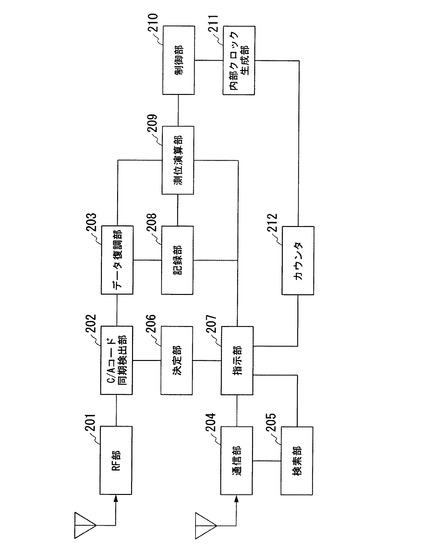
次に、無線通信装置2の構成について説明する。図2は、本実施形態における無線通信装置2の構成を示したブロック図である。図示する例では、無線通信装置2は、RF部201(受信部)と、C/Aコード同期検出部202と、データ復調部203と、通信部204(取得部)と、検索部205と、決定部206と、指示部207と、記録部208と、測位演算部209(演算部)と、制御部210と、内部クロック生成部211と、カウンタ212とを備えている。
【0029】
RF部201は、GPS衛星1が送出する航法メッセージ11を取得(受信)する。C/Aコード同期検出部202は、RF部201が取得した航法メッセージ11がどのGPS衛星1から送信された航法メッセージ11であるか検出する。データ復調部203は、C/Aコードで変調されている航法メッセージ11を復調する。通信部204は、他の無線通信装置2と無線によりデータ通信を行う。検索部205は、通信部204の通信結果に基づいて、通信部204の通信範囲101に存在する他の無線通信装置2を検索して特定する。
【0030】
決定部206は、複数のGPS衛星1のうち、自無線通信装置2と検索部205が特定した他の無線通信装置2とが、補足(サーチ)して航法メッセージ11を取得するGPS衛星1を決定する。指示部207は、検索部205が特定した他の無線通信装置2に対して、決定部206が決定したGPS衛星1の航法メッセージ11の取得を指示する取得指示メッセージを生成する。また、指示部207は、検索部205が特定した他の無線通信装置2に対して、生成した取得指示メッセージを通信部204に送信させる。また、指示部207は、検索部205が特定した他の無線通信装置2に対して、データ復調部203が復調した航法メッセージ11を通信部204に送信させる。また、指示部207は、測位演算に必要な航法メッセージ11が記録部208に記録された場合、測位演算部209に対して測位演算指示を行う。
【0031】
記録部208は、データ復調部203が復調した航法メッセージ11と、通信部204が受信した他の無線通信装置2から送信された航法メッセージ11と、自無線通信装置2のローカル時刻を含むデータとを記録する。測位演算部209は、航法メッセージ11を用いて測位演算を行う。制御部210は、自無線通信装置2が備える各部の制御を行う。内部クロック生成部211は、自無線通信装置2の内部のシステムクロックを生成する。カウンタ212は、指示部207からの要求に応じて内部クロック生成部211が生成したシステムクロックのクロック周期を基準にカウントを行う。
【0032】
次に、起動動作を行う(航法メッセージ11を他の無線通信装置2から受信する)無線通信装置2(図1に示す例では、無線通信装置2−1)の動作について説明する。図3は、本実施形態において、起動動作を行う無線通信装置2の動作手順を示したフローチャートである。
【0033】
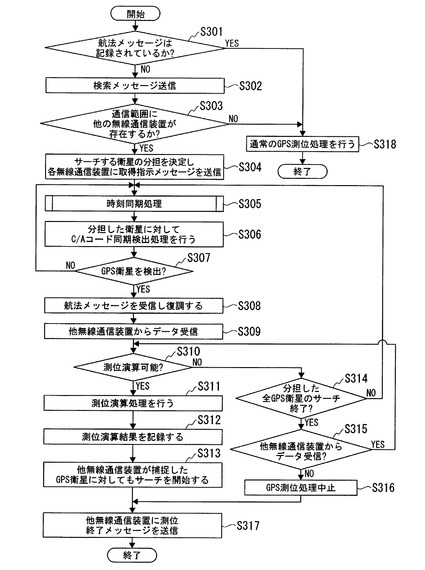
(ステップS301)起動動作を行う無線通信装置2がGPS測位を開始する場合、指示部207は、以前取得した航法メッセージ11が記録部208に記録されているか否かを判定する。以前取得した航法メッセージ11が記録部208に記録されていると指示部207が判定した場合には、ステップS318の処理に進み、それ以外の場合にはステップS302の処理に進む。
【0034】
(ステップ302)記録部208には航法メッセージ11が記録されていないため、検索部205は、通信部204の通信範囲101に存在する他の無線通信装置2を検索するため、通信部204を介して検索メッセージを周囲に送信する。その後、ステップS303の処理に進む。
【0035】
(ステップS303)通信部204は、通信部204の通信範囲101に他の無線通信装置2が存在する場合、他の無線通信装置2から送信される検索メッセージに対する応答メッセージを受信する。検索部205は、通信部204が応答メッセージを受信した場合、通信部204の通信範囲101に他の無線通信装置2が存在すると判定し、通信部204が応答メッセージを受信しなかった場合、通信部204の通信範囲101に他の無線通信装置2が存在しないと判定する。また、検索部205は、通信部204の通信範囲101に他の無線通信装置2が存在すると判定した場合、他の無線通信装置2を特定する。通信部204の通信範囲101に他の無線通信装置2は存在すると検索部205が判定した場合にはステップS304の処理に進み、それ以外の場合にはステップS318の処理に進む。
【0036】
(ステップS304)決定部206は、複数のGPS衛星1のうち、自無線通信装置2と検索部205が特定した他の無線通信装置2とが、航法メッセージ11を取得するGPS衛星1を決定する(サーチするGPS衛星1の分担を決定する)。指示部207は、検索部205が特定した他の無線通信装置2に対して、決定部206が決定したGPS衛星1の航法メッセージ11の取得を指示する取得指示メッセージを生成する。また、指示部207は、検索部205が特定した他の無線通信装置2に対して、生成した取得指示メッセージを通信部204に送信させる。その後、ステップS305の処理に進む。
【0037】
なお、決定部206が、各無線通信装置2がサーチするGPS衛星1を決定する方法はどのような方法を用いてもよい。GPS衛星1は32個存在しているので、例えば、検索部205が検索した他の無線通信装置2と自無線通信装置2とを合わせた装置数で32個を均等に割り、その数毎にサーチするGPS衛星1を分担するようにしてもよい。図1に示した例では、自無線通信装置2−1と他の無線通信装置2−2〜2−3とが存在しているため、決定部206は、例えば、自無線通信装置2−1がGPS衛星1−1〜1−11、他の無線通信装置2−2がGPS衛星1−12〜1−22、他の無線通信装置2−3がGPS衛星1−23〜1−32の各GPS衛星1をサーチするように分担を決定するようにしてもよい。また、決定部206は、例えば、自無線通信装置2−1がGPS衛星1−1,4,7,10,13,16,19,22,25,28,31、他の無線通信装置2−2がGPS衛星1−2,5,8,11,14,17,20,23,26,29,32、他の無線通信装置2−3がGPS衛星1−3,6,9,12,15,18,21,24,27,30,の各GPS衛星1をサーチするように分担を決定するようにしてもよい。また、自無線通信装置2−1の消費電力や、GPS衛星1から送信される電波の受信状態など様々な理由により自無線通信装置2−1のGPS機能を休止させている場合も考えられる。この場合、決定部206は、無線通信装置2−1分担は無く、無線通信装置2−2〜2−3のみに各GPS衛星1をサーチするように分担を決定するようにしてもよい。
【0038】
(ステップS305)起動動作を行う無線端末装置2は、他の無線通信装置2と時刻同期を行う処理である時刻同期処理を開始する。その後、ステップS306の処理に進む。時刻同期処理は、GPS衛星1のサーチを分担した無線通信装置2の間で時刻情報の同期を行うために行う。具体的には、自無線通信装置2のローカル時刻を基準とし、他の無線通信装置2が持つローカル時刻を自無線通信装置2のローカル時刻に同期させる。時刻同期処理の詳細については後述する。
【0039】
(ステップS306)C/Aコード同期検出部202は、自無線通信装置2が分担するGPS衛星1に対してC/Aコード同期検出処理を行う。その後、ステップS307の処理に進む。GPS衛星1はそれぞれ固有のC/Aコードを持っており、GPS衛星1から送出される航法メッセージ11はこのC/Aコードで変調されている。GPS衛星1から送出される航法メッセージ11を復調するためには、受信したメッセージがどのC/Aコードで変調されているのか検出する必要があるのでC/Aコード同期検出処理を行う。
【0040】
なお、C/Aコードは1.023MHzの周波数で1023個の乱数で構成されているため、1つのGPS衛星1を検出するためには一般的にC/Aコード1パターンに対して位相をずらしながら検出する必要がある。従って、各無線通信装置2が検出しなければならないGPS衛星1の数が減れば、それだけC/Aコード同期検出処理に掛かる時間を短縮することが可能となる。すなわち、C/Aコード同期検出処理を複数の無線通信装置2で分担して行えば、C/Aコード同期検出処理に掛かる時間を短縮することが可能となる。
【0041】
(ステップS307)C/Aコード同期検出部202は、ステップS306の処理でGPS衛星1を検出したか否かを判定する。GPS衛星1を検出したとC/Aコード同期検出部202が判定した場合にはステップS308の処理に進み、それ以外の場合にはステップS305の処理に戻る。なお、ステップS305の処理に戻り、ステップS306の処理で再度C/Aコード同期検出処理を行う場合、先ほどのC/Aコード同期検出処理で検出を試みたC/Aコードのパターンとは違うC/Aコードのパターンを、自無線通信装置2に分担されたGPS衛星1のC/Aコードのパターンから選択して処理を行う。
【0042】
(ステップS308)RF部201は、C/Aコード同期検出部202が検出したGPS衛星1から送出される航法メッセージ11を受信する。そして、データ復調部203は復調化処理を行い、RF部201が受信した航法メッセージ11を復調する。その後、ステップS309の処理に進む。この処理により、無線通信装置2は、自装置に割り当てられたGPS衛星1から送出される航法メッセージ11を取得することができる。
【0043】
(ステップS309)通信部204は、他の無線通信装置2から送信されるGPS衛星1の航法メッセージ11と航法メッセージ受信時刻とを含むデータを受信する。その後、ステップS310の処理に進む。この処理により、無線通信装置2は、複数のGPS衛星1から送出される航法メッセージ11を取得することができる。なお、他の無線通信装置2から送信されるGPS衛星1の航法メッセージ11と航法メッセージ受信時刻とを含むデータを受信する処理は、ステップS304の処理を終了した後、GPS衛星1のサーチ処理と並列して開始しておくことが望ましい。
【0044】
(ステップS310)測位演算部209は、ステップS308の処理とステップS309の処理とで取得した航法メッセージ11を用いて測位演算を行うことが出来るか否かを判定する。取得した航法メッセージ11を用いて測位演算を行うことができると判定した場合にはステップS311の処理に進み、それ以外の場合にはステップS314の処理に進む。ここで、GPSの測位演算をするためには、一般的に4つのGPS衛星1から送出される航法メッセージ11を受信することが必要である。従って、測位演算部209は、4つ以上のGPS衛星1から送出される航法メッセージ11を取得したか否かを判定し、4つ以上のGPS衛星1から送出される航法メッセージ11を取得した場合、取得した航法メッセージ11を用いて測位演算を行うことができると判定する。
【0045】
(ステップS311)測位演算部209は、ステップS308の処理とステップS309の処理とで取得した航法メッセージを用いて測位演算を行う。その後、ステップS312の処理に進む。
(ステップS312)測位演算部209は、ステップS311の処理で得られた演算結果を記録部208に記録する。その後、ステップS313の処理に進む。
(ステップS313)C/Aコード同期検出部202は、自無線通信装置2だけで測位を継続できるように、他の無線通信装置2が検出に成功したGPS衛星1に対してサーチを開始する。その後、ステップS314の処理に進む。
【0046】
(ステップS314)指示部207は、自無線通信装置2に割り当てた全てのGPS衛星1のサーチは完了したか否かを判定する。自無線通信装置2に割り当てた全てのGPS衛星1のサーチは完了したと指示部207が判定した場合にはステップS315の処理に進み、それ以外の場合にはステップS305の処理に戻る。
(ステップS315)指示部207は、他の無線通信装置2に割り当てた全てのGPS衛星1の航法メッセージ11を取得したか否かを判定する。他の無線通信装置2に割り当てた全てのGPS衛星1の航法メッセージ11を取得したと指示部207が判定した場合にはステップS316の処理に進み、それ以外の場合にはステップS310の処理に戻る。
(ステップS316)指示部207は、GPS測位処理を中止する。その後、ステップS317の処理に進む。
【0047】
(ステップS317)指示部207は、通信部204を介して、GPS測位処理の終了を示す測位終了メッセージを他の無線通信装置2に対して送信する。その後、処理を終了する。
(ステップS318)無線通信装置2は、通常のGPS測位処理を行う。その後、処理を終了する。例えば、ステップS302の処理で送信する検索メッセージの応答メッセージの受信待機時にタイムアウトを設けておき、応答メッセージが返ってこなければ通常のGPS測位処理を行う。
【0048】
上述したステップS301〜ステップS318の処理を実行することで、起動動作を行う無線通信装置2は、GPS衛星1から送出される航法メッセージ11を他の無線通信装置2に取得させることができる。また、起動動作を行う無線通信装置2は、他の無線通信装置2が取得した航法メッセージ11と自無線通信装置2が取得した航法メッセージ11とを用いて測位を行うことができる。
【0049】
次に、起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2(図1に示す例では、無線通信装置2−2〜2−3)の動作手順について説明する。図4は、本実施形態において、起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2の動作手順を示したフローチャートである。
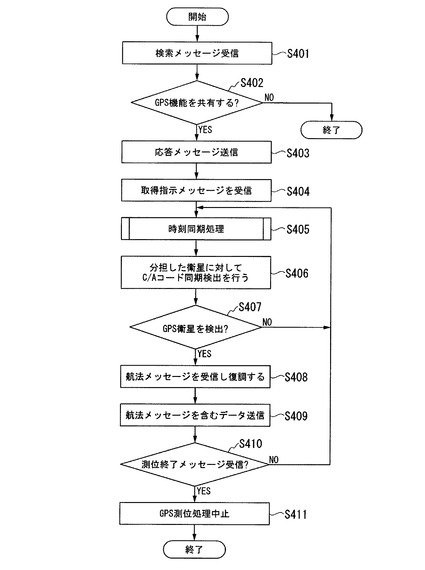
【0050】
(ステップS401)起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2の通信部204は、起動動作を行う無線通信装置2から送信される検索メッセージを受信する。その後、ステップS402の処理に進む。
(ステップS402)指示部207は、自無線通信装置2のGPS機能を共有するか否かを判定する。自無線通信装置2のGPS機能を共有すると指示部207が判定した場合にはステップS403の処理に進み、共有しないと判定した場合には処理を終了する。GPS機能を共有しないと判定する場合としては、例えば自無線通信装置2のGPS機能をOFFにしている場合などがある。
【0051】
(ステップS403)指示部207は、起動動作を行う無線通信装置2に対して、GPS機能を共有することを通知する応答メッセージを、通信部204を介して送信する。その後、ステップS404の処理に進む。なお、応答メッセージを受信した起動動作を行う無線通信装置2は、図3で説明したように、各無線通信装置2がサーチするGPS衛星1の分担を決定し、他の無線通信装置2に対して取得指示メッセージを送信する。
(ステップS404)通信部204は、起動動作を行う無線通信装置2から送信される取得指示メッセージを受信する。その後、ステップS405の処理に進む。
【0052】
(ステップS405)起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2は、起動動作を行う無線端末装置2と時刻同期を行う処理である時刻同期処理を開始する。その後、ステップS406の処理に進む。時刻同期処理の詳細については後述する。
(ステップS406)C/Aコード同期検出部202は、ステップS404の処理で受信した取得指示メッセージで指示されたGPS衛星1に対してC/Aコード同期検出処理を行う。その後、ステップS407の処理に進む。
【0053】
(ステップS407)C/Aコード同期検出部202は、ステップS406の処理でGPS衛星1を検出したか否かを判定する。GPS衛星1を検出したとC/Aコード同期検出部202が判定した場合にはステップS408の処理に進み、それ以外の場合にはステップS405の処理に戻る。なお、ステップS405の処理に戻り、再度ステップS406の処理でC/Aコード同期検出処理を行う場合、先ほどのC/Aコード同期検出処理で検出を試みたC/Aコードのパターンとは違うC/Aコードのパターンを、自無線通信装置2に分担されたGPS衛星1のC/Aコードのパターンから選択して処理を行う。
【0054】
(ステップS408)RF部201は、C/Aコード同期検出部202が検出したGPS衛星1から送出される航法メッセージ11を受信する。そして、データ復調部203は復調化処理を行い、RF部201が受信した航法メッセージ11を復調する。その後、ステップS409の処理に進む。この処理により、無線通信装置2は、自装置に割り当てられたGPS衛星1から送出される航法メッセージ11を取得することができる。
【0055】
(ステップS409)指示部207は、データ復調部203が復調した航法メッセージ11に、自無線通信装置2のローカル時刻を基準にした航法メッセージ11の受信時刻情報を含めて、起動動作を行う無線通信装置2に対して通信部204を介して送信する。その後、ステップS410の処理に進む。
(ステップS410)指示部207は、ステップS409の処理で航法メッセージ11を送信した後、起動動作を行う無線通信装置2から測位終了メッセージを受信したか否かを判定する。測位終了メッセージを受信したと指示部207が判定した場合にはステップS411の処理に進み、それ以外の場合にはステップS405の処理に戻る。
(ステップS411)指示部207は、GPS測位処理を中止する。その後、処理を終了する。
【0056】
上述したステップS401〜ステップS411の処理を実行することで、起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2は、起動動作を行う無線通信装置2からの要求に応じてGPS衛星1から送出される航法メッセージ11を取得し、起動動作を行う無線通信装置2に対して取得した航法メッセージ11を送信することができる。
【0057】
次に、無線通信装置2の間での時刻同期について説明する。無線通信装置2は、GPS衛星1が送出する航法メッセージ11を基に測位演算を行う際、航法メッセージ11を受信した時刻が必要となる。GPS衛星1が送出する航法メッセージ11には、GPS衛星1が航法メッセージ11を送出した時刻が記録されている。そのため、仮に無線通信装置2がGPS衛星1と完全に時刻情報の同期が取れていれば、GPS衛星1と無線通信装置2との間の距離を簡単に求めることができる。しかしながら、無線通信装置2には、GPS衛星1に搭載されているような高精度なクロックが搭載されておらず、GPS衛星1のGPS時刻と同期することは不可能である。従って、測位演算の際、GPS衛星1と無線通信装置2との時刻の誤差も同時に求める必要がある。本実施形態では、複数のGPS衛星1が送出する航法メッセージ11を複数の無線通信装置2で分担して取得し、そのうちの1つの無線通信装置2で測位演算を行うため、複数の無線通信装置2の間で基準時刻を揃えておく必要がある。
【0058】
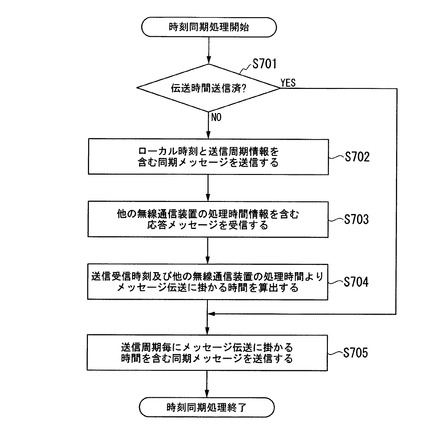
次に、起動動作を行う無線端末装置2が、他の無線通信装置2と時刻の同期を行う時刻同期処理について説明する。図5は、本実施形態において、起動動作を行う無線通信装置2の時刻同期処理の処理手順を示したフローチャートである。なお、無線通信では、通信に掛かる伝送時間がまちまちである。従って、単純に自無線通信装置2から他の無線通信装置2に対して時刻情報を送信しても、他の無線通信装置2が時刻情報を受信した時には伝送時間分の誤差が生じるため、伝送時間を考慮することで無線通信装置2の間の基準時刻を設定することが可能になる。
【0059】
(ステップS701)起動動作を行う無線通信装置2の指示部207は、他の無線通信装置2に対して、伝送時間を示す伝送時間情報を送信済みであるか否かを判定する。他の無線通信装置2に対して伝送時間情報を送信済みであると指示部207が判定した場合にはステップS705の処理に進み、それ以外の場合にはステップS702の処理に進む。
【0060】
(ステップS702)指示部207は、他の無線通信装置2に対して、自無線通信装置2のローカル時刻と送信周期情報とを含む同期メッセージを送信する。また、指示部207は、同期メッセージを送信したローカル時刻を記録部208に記録する。その後、ステップS703の処理に進む。なお、起動動作を行う無線通信装置2は、時刻同期のために周期的に同期メッセージを送信する。送信周期情報は、同期メッセージを送信する周期を示す情報である。例えば、起動動作を行う無線通信装置2は、同期メッセージを周期10msで送信する場合、他の無線通信装置2に対して、周期10msを示す送信周期情報を送信する。
【0061】
(ステップS703)通信部204は、他の無線通信装置2から送信される同期メッセージに対応する応答メッセージを受信する。なお、応答メッセージには、他の無線通信装置2における処理時間を示す処理時間情報が含まれている。他の無線通信装置2における処理時間は、他の無線通信装置2が同期メッセージを受信してから応答メッセージを送信するまでに掛かった時間のことである。また、指示部207は、通信部204が応答メッセージを受信したローカル時刻を記録部208に記録する。その後、ステップS704の処理に進む。
【0062】
(ステップS704)指示部207は、同期メッセージを送信した時刻と、応答メッセージを受信した時刻と、応答メッセージに含まれる処理時間情報を用いて、以下の(1)式で送信または受信に掛かる伝送時間を求める。その後、ステップS705の処理に進む。
伝送時間=(応答メッセージの受信時刻−同期メッセージを送信した時刻−他の無線通信装置2における処理時間)/2・・・(1)
【0063】
(ステップS705)指示部207は、自無線通信装置2のローカル時刻と、送信周期情報と、ステップS704の処理で算出した伝送時間情報とを含む同期メッセージを、送信周期となった場合に他の無線通信装置2に対して送信する。その後、図3のステップS306の処理に進む。なお、指示部207は、時刻同期処理を、GPS衛星1の検出処理と並列で周期的に実行しており、他の無線通信装置2に対して送信周期毎に同期メッセージを送信する。
【0064】
次に、起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2が、起動動作を行う無線通信装置2と時刻の同期を行う時刻同期処理について説明する。図6は、本実施形態において、起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2の時刻同期処理の処理手順を示したフローチャートである。
【0065】
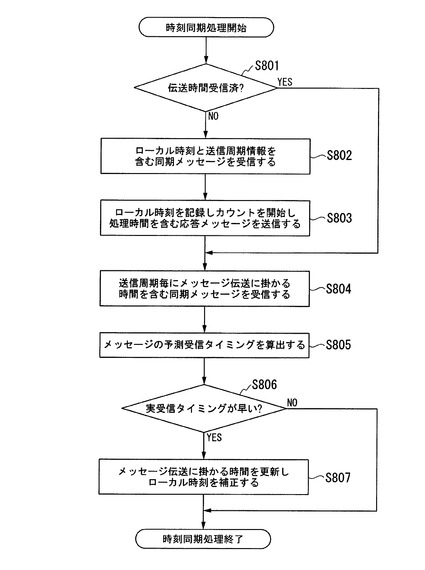
(ステップS801)起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2の指示部207は、起動動作を行う無線通信装置2から、伝送時間を示す伝送時間情報を受信済みであるか否かを判定する。伝送時間情報を受信済みであると指示部207が判定した場合にはステップS804の処理に進み、それ以外の場合にはステップS802の処理に進む。
(ステップS802)通信部204は、起動動作を行う無線通信装置2から送信される、起動動作を行う無線通信装置2のローカル時刻と送信周期情報とを含む同期メッセージを受信する。その後、ステップS803の処理に進む。
【0066】
(ステップS803)指示部207は、通信部204が受信した同期メッセージに含まれる、起動動作を行う無線通信装置2のローカル時刻を記録部208に記録する。また、指示部207は、内部クロック生成部211が生成するクロックとカウンタ212を用いて、起動動作を行う無線通信装置2のローカル時刻を進める。すなわち、起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2において、起動動作を行う無線通信装置2のローカル時刻と同期した時刻がカウントされる。この時刻を基準時刻とする。これにより、起動動作を行う無線通信装置2と、起動動作を行う無線通信装置2に航法メッセージ11を送信する無線通信装置2とは、伝送時間の誤差はあるものの基準時刻を同じように進めることが可能になる。また、指示部207は、同期メッセージを受信してから応答メッセージを送信するまでに掛かった時間である処理時間を含む応答メッセージを、起動動作を行う無線通信装置2に対して、通信部204を介して送信する。その後、ステップS804の処理に進む。
【0067】
(ステップS804)通信部204は、起動動作を行う無線通信装置2から送信される、起動動作を行う無線通信装置2のローカル時刻と、送信周期情報と、伝送時間情報とを含む同期メッセージを受信する。その後、ステップS805の処理に進む。
(ステップS805)指示部207は、ステップS804で受信した同期メッセージに含まれる送信周期情報と伝送時間情報を用いて、次に同期メッセージが送信される時刻を算出する。その後、ステップS806の処理に進む。具体的には、指示部207は、自無線通信装置2が同期メッセージを受信した後、同期メッセージに含まれる送信周期から伝送時間を差し引いた時刻後に、次に同期メッセージが送信されると算出する。
【0068】
(ステップS806)本実施形態では、ステップS805で算出した次に同期メッセージが送信される時刻は、起動動作を行う無線通信装置2が同期メッセージを送信する送信時刻と同期していると仮定する。指示部207は、実際に次の同期メッセージを受信した時、予測した同期メッセージの受信時刻よりも、実際に同期メッセージを受信した時刻の方が早いか否かを判定する。予測した同期メッセージの受信時刻よりも、実際に同期メッセージを受信した時刻の方が早いと指示部207が判定した場合にはステップS807の処理に進み、それ以外の場合には処理を終了する。
(ステップS807)指示部207は、メッセージの伝送時間を更新し、基準時刻を補正する。その後、処理を終了する。なお、指示部207は、時刻同期処理を、GPS衛星1の検出処理と並列で周期的に実行する。
【0069】
例えば、最初に求めた伝送時間が10msで、次に同期メッセージを受信した時、予測受信タイミングよりも3ms早く同期メッセージを受信した場合、実際の伝送時間は7msであることが分かる。従って、起動動作を行う無線通信装置2に航法メッセージ11を送信する無線通信装置2でカウントを続けている基準時刻は、起動動作を行う無線通信装置2のローカル時刻から7ms差し引きすることで、より正確に基準時刻の同期を行うことができる。
【0070】
また、例えば、最初に求めた伝送時間が10msで、次に同期メッセージを受信した時、予測受信タイミングより8ms遅く同期メッセージを受信した場合、実際の伝送時間は18msであることが分かる。しかしながら、伝送時間が小さい時の方がより正確な基準時刻を求めることができるため、予測受信タイミングよりも同期メッセージを遅く受信した時は、メッセージの伝送時間と基準時刻との補正を行わない。
【0071】
上述したステップS701〜ステップS705の処理、およびステップS801〜807の処理を実行することで、各無線通信装置2の基準時刻の同期を行うことができる。
【0072】
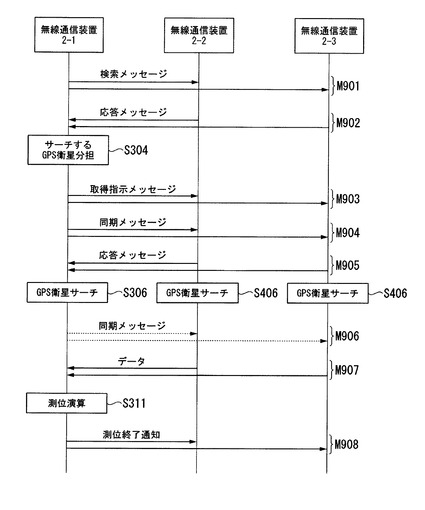
次に、図3,図4を用いて説明した処理における、無線通信装置2の間のメッセージの流れについて説明する。図7は、本実施形態における無線通信装置2の間でのメッセージの流れを示したシーケンス図である。図示する例では、無線通信装置2−1は、起動動作を行う無線通信装置2である。また、無線通信装置2−2〜2−3は、起動動作を行う無線通信装置2に航法メッセージ11を送信する無線通信装置2である。
【0073】
最初に無線通信装置2−1は、無線通信装置2−2〜2−3に対して検索メッセージを送信する(M901)。無線通信装置2−2〜2−3は応答メッセージを無線通信装置2−1に対して送信する(M902)。無線通信装置2−1は、各無線通信装置2−1〜203がサーチするGPS衛星1の分担を行い(S304)、取得指示メッセージを無線通信装置2−2〜2−3に対して送信する(M903)。
【0074】
続いて、無線通信装置2−1は、無線通信装置2−1〜2−3間で時刻を同期するために同期メッセージを送信する(M904)。無線通信装置2−2〜2−3は、それぞれ処理時間を含む応答メッセージを無線通信装置2−1に対して送信する(M905)。無線通信装置2−1〜2−3は、それぞれ割り当てられたサーチすべきGPS衛星1のサーチを開始する(S306,S406)。
【0075】
GPS衛星1のサーチ処理の間で、無線通信装置2−1は同期メッセージを周期的に送信し続ける(M906)。無線通信装置2−2〜2−3は、割り当てられたGPS衛星1を検出して航法メッセージ11を受信した後、無線通信装置2−1に対して、航法メッセージ11と無線通信装置2−1のローカル時刻を基準とした受信時刻を含むデータとを送信する(M907)。無線通信装置2−1は、航法メッセージ11と受信時刻を含むデータとを受信し、測位演算を行う(S311)。無線通信装置2−1は、測位演算完了後、無線通信装置2−2〜2−3に対して測位終了メッセージを送信する(M908)。
【0076】
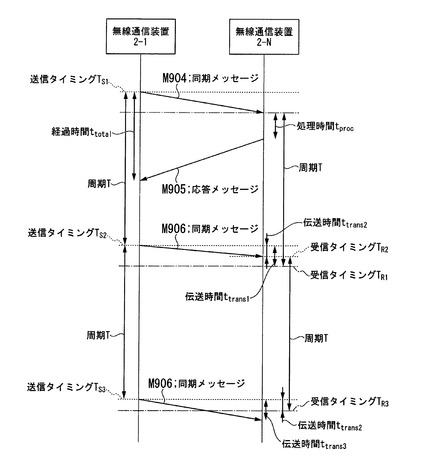
次に、図5,図6を用いて説明した時刻同期処理における、無線通信装置2との間のメッセージの流れについて説明する。図8は、本実施形態において、時刻同期処理における無線通信装置2の間でのメッセージの流れを示したシーケンス図である。図示する例では、無線通信装置2−1は、起動動作を行う無線通信装置2である。また、無線通信装置2−Nは、起動動作を行う無線通信装置2に航法メッセージ11を送信する無線通信装置2である。
【0077】
図示するように、無線通信装置2−1は、同期メッセージを周期Tで送信する。この周期Tで送信する送信タイミングをそれぞれTs1、Ts2、Ts3、・・・とする。まず、無線通信装置2−1はM904の同期メッセージを送信する。無線通信装置2−Nは同期メッセージを受信する。この受信時刻は、無線通信装置2−1が同期メッセージを送信した時刻よりも伝送時間分送れている。無線通信装置2−Nは、受信した同期メッセージから無線通信装置2−1のローカル時刻を取得するなどの内部処理を実行後、応答メッセージを送信する。このとき、無線通信装置2−Nは、内部処理を行う際、処理時間tprocの時間を要する。無線通信装置2−1が最初の同期メッセージを送信してから応答メッセージを受信するまでに掛かる時間を経過時間ttotalとすると、上述した(1)式を用いて伝送時間ttrans1を算出することができる。
【0078】
次に、無線通信装置2−1がM906の同期メッセージを送信するとき、無線通信装置2−Nは、M904の同期メッセージを受信してから周期T経過後の受信タイミングTR1を期待している。算出した伝送時間ttrans1を考慮することで、無線通信装置2−NはM906の同期メッセージの送信タイミングを予測することが可能である。つまり、無線通信装置2−1が同期メッセージを送信するタイミングを同定することになり、無線通信装置2−Nは、基準時刻を無線通信装置2−1のローカル時刻に同期させることが可能になる。例えば、無線通信装置2−Nは、実際に同期メッセージを受信タイミングTR2に受信した場合、伝送時間はttrans2であると予測できる。この伝送時間ttrans2は、無線通信装置2−Nで予測する送信タイミングTS2を基準として同期メッセージの受信時刻を比較し、その差分として算出する。
【0079】
次に、無線通信装置2−1が、送信タイミングTS3でM906の同期メッセージ送信する場合、無線通信装置2−Nは、先ほど同期メッセージを受信した受信タイミングTR2から周期T後の受信タイミングTR3に同期メッセージを受信すると予測する。図示するように、無線通信装置2−1が同期メッセージを送信してから、無線通信装置2−Nが同期メッセージを受信するまでに、周期T+伝送時刻ttrans3だけ時間が掛かった場合、ttrans3>ttrans2であるため、この伝送時間ttrans3は以降の処理に反映させない。無線通信における伝送時間にはバラツキはあるが、伝送時間が小さいものを用いて補正を繰り返すことで、より精度の高い時刻同期を行うことが可能になる。以上の処理を行うことにより、無線通信装置2の間で基準時刻の同期を行うことが可能になる。
【0080】
上述した通り、本実施形態によれば、起動動作を行う無線通信装置2は、初めて自装置の現在位置の測位を開始する時、通信部204の通信範囲101に存在する他の無線通信装置2を検索して特定する。そして、起動動作を行う無線通信装置2は、特定した無線通信装置2と自装置のうち、どの装置がどのGPS衛星1−1〜1−4の補足を行うか決定する。その後、起動動作を行う無線通信装置2は、他の無線通信装置2に対して、決定したGPS衛星1の航法メッセージ11の取得を指示するメッセージを送信する。
【0081】
他の無線通信装置2は、起動動作を行う無線通信装置2が決定したGPS衛星1の航法メッセージ11を取得する。そして、他の無線通信装置2は、取得した航法メッセージ11を、起動動作を行う無線通信装置2に対して送信する。起動動作を行う無線通信装置2は、自装置と他の無線通信装置2とが取得したGPS衛星1の航法メッセージ11を用いて測位演算を行う。
【0082】
従って、GPS衛星1−1〜1−4が送出す航法メッセージ11−1〜11−4を複数の無線通信装置2−1〜2−3で分担して取得し、取得した航法メッセージ11−1〜11−4を用いて測位演算を行うことで、1台の無線通信装置2のみで航法メッセージ11−1〜11−4を取得し測位演算するよりも、GPS衛星1のサーチ時間を短縮し、測位時間をより短縮することができる。
【0083】
以上、この発明の一実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0084】
1,1−1〜1−4・・・GPS衛星、2,2−1〜2−3,2−N・・・無線通信装置、11・・・航法メッセージ、201・・・RF部、202・・・コード同期検出部、203・・・データ復調部、204・・・通信部、205・・・検索部、206・・・決定部、207・・・指示部、208・・・記録部、209・・・測位演算部、210・・・制御部、211・・・内部クロック生成部、212・・・カウンタ
【技術分野】
【0001】
本発明は、無線通信装置に関する。
【背景技術】
【0002】
近年、GPS受信機を具備したモバイル機器が市場に増えてきており、ユーザが手軽に現在位置情報を取得し、位置情報を写真に付与しその写真を電子地図上に配置したり、あるいは現在位置を友達に伝えたりなど様々なアプリケーションやサービスが展開している。
【0003】
GPS衛星を使った測位システムは、複数のGPS衛星から送出される信号を受信し、信号に含まれるGPS衛星の航法メッセージを基にGPS受信機の位置を算出している。この航法メッセージにはGPS衛星の軌道情報が含まれている。この軌道情報を用いることで、GPS受信機は現在GPS受信機の上空にどのGPS衛星が飛んでいるか求めることができる。
【0004】
初めてGPS測位を行う時や以前GPS測位を実施した場所と大幅に異なる場所、あるいは最後に測位を終えてから大幅に時間を経過しているような場合、GPS受信機は適切な航法メッセージを持っていない。従って、GPS受信機は、どのGPS衛星が上空を飛んでいるのか分からないため、全てのGPS衛星に対して総当りでサーチをする必要がある。一般的にこの状態からの測位開始をコールドスタートと呼び、測位に大幅な時間を要する。
【0005】
GPS受信機は、一度測位を行うとGPS衛星の航法メッセージをGPS受信機内に記録する。これにより、GPS受信機は、次回の測位時には、記録した航法メッセージを用いてどのGPS衛星が上空を飛んでいるのか求めることができるため、測位に掛かる時間を大幅に短縮することができる。しかしながら、GPS受信機が適切な航法メッセージをGPS受信機内に記録していないという状態はしばしば発生する。例えば、GPS受信機を購入後、初回に起動した時や、海外へ移動しGPS受信機を使用する時などである。このような条件の時、測位を完了するために数分間を要する場合がある。
【0006】
測位時間を短縮する方法として、測位機能以外の機能が動作することによる不要輻射電波を抑えることで測位に要する時間を短縮する方法(例えば、特許文献1参照)や、ホットスタートやコールドスタートでの起動時の制限時間の設定値を起動モードに応じて適切に設定することで総合的な測位に要する時間を短縮する方法(例えば、特許文献2参照)が知られている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2004−61336号公報
【特許文献2】特開2003−344523号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
GPS衛星からの信号電波はC/Aコードと呼ばれる各GPS衛星固有のコードによって変調されており、GPS受信機側はGPS衛星からの信号の中に含まれるC/Aコードを見つけ出し、信号を復調している。C/Aコードは周波数1.023MHzで1023チップを1周期として繰り返すもので、現在稼動している32個のGPS衛星にそれぞれ固有の値が割り当てられている。
【0009】
GPS受信機は、初回起動時や以前測位を実施した位置から遠く離れた位置へ移動し、改めて測位を開始する時など、GPS衛星の軌道情報を持っていない場合、GPS衛星が現在どのあたりを飛んでいるのか推定することができないため、GPS衛星から受信した信号がどのGPS衛星から送出された電波なのかを見つけるために32個のGPS衛星に割り当てられたC/Aコードを1位相毎ずらしながら総当りで検出する必要がある。
【0010】
また、GPS衛星から送出される信号をサーチするためには電波の受信に適した場所であるに越したことはないが、実際にユーザがGPS受信機を使い測位を行う場所が必ずしも電波の受信に適した場所であるとは限らない。このため、GPS衛星が送出する信号の受信条件によっては、GPS受信機がGPS衛星をサーチするために大幅な時間を要する。
【0011】
GPS衛星から送出される航法メッセージは5サブフレームで1フレームが形成され、1フレームをデータの単位として送出している。GPS衛星から送出される信号の転送速度は50bpsであるため、GPS受信機は1フレームの航法メッセージの受信に30秒の時間を要する。更に、GPS受信機は、3次元測位を行うためには4つ以上のGPS衛星の航法メッセージを受信できなければ演算を行うことができないため、即位演算が行えるようになるまで更に大幅な時間を要することになる。ユーザが持ち歩くモバイル機器、特にデジタルカメラのように電源投入後に即撮影を行い、撮影地点の位置情報を記録するような使い方では、この測位に掛かる時間は許容される範囲にない。特許文献1及び特許文献2に記載の技術では、GPS測位の中で最も時間が掛かるGPS衛星のサーチに関して時間の短縮はできないという問題がある。また、航法メッセージの受信状態が悪い場合、GPS受信機は測位自体を行うことができないという問題がある。
【0012】
本発明は上記課題を解決するためになされたものであり、GPS衛星のサーチ時間を短縮し、測位時間をより短縮することができる無線通信装置を提供することを目的とする。
【課題を解決するための手段】
【0013】
本発明は、GPS衛星から送信される航法メッセージの取得を周辺端末に対して指示する指示部と、前記周辺端末が取得した前記航法メッセージを当該周辺端末から取得する取得部と、前記周辺端末から取得した前記航法メッセージを用いて測位演算を行う演算部と、を有することを特徴とする無線通信装置である。
【0014】
また、本発明は、複数の前記GPS衛星の中から前記周辺端末に割り当てる前記GPS衛星を決定する決定部を更に有し、前記指示部は、前記GPS衛星を割り当てた前記周辺端末に対して当該GPS衛星から送信される前記航法メッセージの取得を指示することを特徴とする無線通信装置である。
【0015】
また、本発明は、自装置と時刻の同期を取るための同期メッセージを前記周辺端末に対して送信する通信部を更に有することを特徴とする無線通信装置である。
【0016】
また、本発明の無線通信装置において、前記通信部は、自装置と前記周辺端末との間のデータ伝送にかかる時間を示す情報を含む前記同期メッセージを送信することを特徴とする。
【0017】
また、本発明は、前記GPS衛星から前記航法メッセージを受信する受信部を更に有し、前記演算部は、前記取得部が取得した前記航法メッセージと前記受信部が受信した前記航法メッセージとを用いて前記測位演算を行うことを特徴とする無線通信装置である。
【0018】
また、本発明の無線通信装置において、前記指示部は、複数の前記周辺端末に対して前記指示を行い、前記取得部は、複数の前記周辺端末から前記航法メッセージを取得し、前記演算部は、複数の前記周辺端末から取得した前記航法メッセージを用いて測位演算を行うことを特徴とする。
【0019】
また、本発明は、無線通信を用いて自装置の周囲に存在する前記周辺端末を検索し特定する検索部を更に有し、前記指示部は、前記検索部が特定した前記周辺端末に対して前記GPS衛星から送信される前記航法メッセージの取得を指示することを特徴とする無線通信装置である。
【発明の効果】
【0020】
本発明によれば、指示部は、GPS衛星から送信される航法メッセージの取得を周辺端末に対して指示する。また、取得部は、周辺端末が取得した航法メッセージを当該周辺端末から取得する。また、演算部は、周辺端末から取得した航法メッセージを用いて測位演算を行う。この構成により、周辺端末が取得した航法メッセーを用いて測位演算を行うことができる。従って、GPS衛星のサーチ時間を短縮し、測位時間をより短縮することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施形態における無線通信装置とGPS衛星とがデータを送受信する際の例を示した概略図である。
【図2】本実施形態における無線通信装置の構成を示したブロック図である。
【図3】本実施形態において、起動動作を行う無線通信装置の動作手順を示したフローチャートである。
【図4】本実施形態において、航法メッセージを送信する無線通信装置の動作手順を示したフローチャートである。
【図5】本実施形態において、起動動作を行う無線通信装置の時刻同期処理の処理手順を示したフローチャートである。
【図6】本実施形態において、航法メッセージを送信する無線通信装置の時刻同期処理の処理手順を示したフローチャートである。
【図7】本実施形態における無線通信装置の間でのメッセージの流れを示したシーケンス図である。
【図8】本実施形態において、時刻同期処理における無線通信装置の間でのメッセージの流れを示したシーケンス図である。
【発明を実施するための形態】
【0022】
以下、本発明の一実施形態について図面を参照して説明する。図1は、本実施形態における無線通信装置とGPS衛星とがデータを送受信する際の例を示した概略図である。GPS衛星は地上2万kmの6つの軌道上に4機ずつ配置されている。図示する例では複数のGPS衛星1のうち、4つのGPS衛星1−1〜1−4が示されている。これらのGPS衛星1−1〜1−4は1575.42MHzの周波数帯を使用し、地上に対して航法メッセージ11−1〜11−4を送出している。
【0023】
また、図示する例では無線通信装置2として、3台の無線通信装置2−1〜2−3が示されている。無線通信装置2は、例えばGPS機能付のデジタルカメラである。無線通信装置2−1〜2−3は、自身の現在位置を測位するためにはGPS衛星1−1〜1−4を捕捉し、GPS衛星1−1〜1−4から送出されている航法メッセージ11−1〜11−4を取得する。そして、無線通信装置2−1〜2−3は、取得した航法メッセージ11−1〜11−4を用いて測位演算を行う。
【0024】
本実施形態では無線通信装置2−1〜2−3は、GPS受信部だけではなく、例えば無線LANなどの他の通信手段を具備している。また、無線通信装置2−1は、初めて自装置の現在位置の測位を開始する時、GPS受信部以外の通信方式で、この通信方式の通信範囲101に存在する無線通信装置2−2〜2−3(周辺端末)を検索して特定する。そして、無線通信装置2−1は、特定した無線通信装置2−2〜2−3と自装置のうち、どの装置がどのGPS衛星1−1〜1−4の補足を行うか決定する。その後、無線通信装置2−1は、無線通信装置2−2〜2−3に対して、決定したGPS衛星1−1〜1−4の航法メッセージ11−1〜11−4の取得を指示するメッセージを送信する。
【0025】
無線通信装置2−1〜2−3は、無線通信装置2−1が決定したGPS衛星1−1〜1−4の航法メッセージ11−1〜11−4を取得する。そして、無線通信装置2−2,2−3は取得した航法メッセージ11−1〜11−4を無線通信装置2−1に対して送信する。無線通信装置2−1は、自装置と無線通信装置2−2〜2−3とが取得したGPS衛星1−1〜1−4の航法メッセージ11−1〜11−4を用いて測位演算を行う。なお、この場合の無線通信装置2−1を、起動動作を行う無線通信装置2とする。
【0026】
例えば、起動動作を行う無線通信装置2−1は、自無線通信装置2−1がGPS衛星1−1,1−4を補足し、無線通信装置2−2がGPS衛星1−2を補足し、無線通信装置2−3がGPS衛星1−3を補足すると決定する。そして、無線通信装置2−1は、GPS衛星1−2を補足して航法メッセージ11−2の取得を指示するメッセージを無線通信装置2−2に対して送信し、GPS衛星1−3を補足して航法メッセージ11−3の取得を指示するメッセージを無線通信装置2−3に対して送信する。無線通信装置2−1は、GPS衛星1−1,1−4を補足して航法メッセージ11−1,11−4を取得する。また、無線通信装置2−2は、GPS衛星1−2を補足して航法メッセージ11−2を取得し、取得した航法メッセージ11−2を無線通信装置2−1に対して送信する。また、無線通信装置2−3は、GPS衛星1−3を補足して航法メッセージ11−3を取得し、取得した航法メッセージ11−3を無線通信装置2−1に対して送信する。その後、無線通信装置2−1は、航法メッセージ11−1〜11−4を用いて測位演算を行う。
【0027】
上述するように、GPS衛星1−1〜1−4が送出す航法メッセージ11−1〜11−4を複数の無線通信装置2−1〜2−3で分担して取得し、取得した航法メッセージ11−1〜11−4を用いて測位演算を行うことで、1台の無線通信装置2のみで航法メッセージ11−1〜11−4を取得し測位演算するよりも、測位に掛かる時間をより短縮することができる。
【0028】
次に、無線通信装置2の構成について説明する。図2は、本実施形態における無線通信装置2の構成を示したブロック図である。図示する例では、無線通信装置2は、RF部201(受信部)と、C/Aコード同期検出部202と、データ復調部203と、通信部204(取得部)と、検索部205と、決定部206と、指示部207と、記録部208と、測位演算部209(演算部)と、制御部210と、内部クロック生成部211と、カウンタ212とを備えている。
【0029】
RF部201は、GPS衛星1が送出する航法メッセージ11を取得(受信)する。C/Aコード同期検出部202は、RF部201が取得した航法メッセージ11がどのGPS衛星1から送信された航法メッセージ11であるか検出する。データ復調部203は、C/Aコードで変調されている航法メッセージ11を復調する。通信部204は、他の無線通信装置2と無線によりデータ通信を行う。検索部205は、通信部204の通信結果に基づいて、通信部204の通信範囲101に存在する他の無線通信装置2を検索して特定する。
【0030】
決定部206は、複数のGPS衛星1のうち、自無線通信装置2と検索部205が特定した他の無線通信装置2とが、補足(サーチ)して航法メッセージ11を取得するGPS衛星1を決定する。指示部207は、検索部205が特定した他の無線通信装置2に対して、決定部206が決定したGPS衛星1の航法メッセージ11の取得を指示する取得指示メッセージを生成する。また、指示部207は、検索部205が特定した他の無線通信装置2に対して、生成した取得指示メッセージを通信部204に送信させる。また、指示部207は、検索部205が特定した他の無線通信装置2に対して、データ復調部203が復調した航法メッセージ11を通信部204に送信させる。また、指示部207は、測位演算に必要な航法メッセージ11が記録部208に記録された場合、測位演算部209に対して測位演算指示を行う。
【0031】
記録部208は、データ復調部203が復調した航法メッセージ11と、通信部204が受信した他の無線通信装置2から送信された航法メッセージ11と、自無線通信装置2のローカル時刻を含むデータとを記録する。測位演算部209は、航法メッセージ11を用いて測位演算を行う。制御部210は、自無線通信装置2が備える各部の制御を行う。内部クロック生成部211は、自無線通信装置2の内部のシステムクロックを生成する。カウンタ212は、指示部207からの要求に応じて内部クロック生成部211が生成したシステムクロックのクロック周期を基準にカウントを行う。
【0032】
次に、起動動作を行う(航法メッセージ11を他の無線通信装置2から受信する)無線通信装置2(図1に示す例では、無線通信装置2−1)の動作について説明する。図3は、本実施形態において、起動動作を行う無線通信装置2の動作手順を示したフローチャートである。
【0033】
(ステップS301)起動動作を行う無線通信装置2がGPS測位を開始する場合、指示部207は、以前取得した航法メッセージ11が記録部208に記録されているか否かを判定する。以前取得した航法メッセージ11が記録部208に記録されていると指示部207が判定した場合には、ステップS318の処理に進み、それ以外の場合にはステップS302の処理に進む。
【0034】
(ステップ302)記録部208には航法メッセージ11が記録されていないため、検索部205は、通信部204の通信範囲101に存在する他の無線通信装置2を検索するため、通信部204を介して検索メッセージを周囲に送信する。その後、ステップS303の処理に進む。
【0035】
(ステップS303)通信部204は、通信部204の通信範囲101に他の無線通信装置2が存在する場合、他の無線通信装置2から送信される検索メッセージに対する応答メッセージを受信する。検索部205は、通信部204が応答メッセージを受信した場合、通信部204の通信範囲101に他の無線通信装置2が存在すると判定し、通信部204が応答メッセージを受信しなかった場合、通信部204の通信範囲101に他の無線通信装置2が存在しないと判定する。また、検索部205は、通信部204の通信範囲101に他の無線通信装置2が存在すると判定した場合、他の無線通信装置2を特定する。通信部204の通信範囲101に他の無線通信装置2は存在すると検索部205が判定した場合にはステップS304の処理に進み、それ以外の場合にはステップS318の処理に進む。
【0036】
(ステップS304)決定部206は、複数のGPS衛星1のうち、自無線通信装置2と検索部205が特定した他の無線通信装置2とが、航法メッセージ11を取得するGPS衛星1を決定する(サーチするGPS衛星1の分担を決定する)。指示部207は、検索部205が特定した他の無線通信装置2に対して、決定部206が決定したGPS衛星1の航法メッセージ11の取得を指示する取得指示メッセージを生成する。また、指示部207は、検索部205が特定した他の無線通信装置2に対して、生成した取得指示メッセージを通信部204に送信させる。その後、ステップS305の処理に進む。
【0037】
なお、決定部206が、各無線通信装置2がサーチするGPS衛星1を決定する方法はどのような方法を用いてもよい。GPS衛星1は32個存在しているので、例えば、検索部205が検索した他の無線通信装置2と自無線通信装置2とを合わせた装置数で32個を均等に割り、その数毎にサーチするGPS衛星1を分担するようにしてもよい。図1に示した例では、自無線通信装置2−1と他の無線通信装置2−2〜2−3とが存在しているため、決定部206は、例えば、自無線通信装置2−1がGPS衛星1−1〜1−11、他の無線通信装置2−2がGPS衛星1−12〜1−22、他の無線通信装置2−3がGPS衛星1−23〜1−32の各GPS衛星1をサーチするように分担を決定するようにしてもよい。また、決定部206は、例えば、自無線通信装置2−1がGPS衛星1−1,4,7,10,13,16,19,22,25,28,31、他の無線通信装置2−2がGPS衛星1−2,5,8,11,14,17,20,23,26,29,32、他の無線通信装置2−3がGPS衛星1−3,6,9,12,15,18,21,24,27,30,の各GPS衛星1をサーチするように分担を決定するようにしてもよい。また、自無線通信装置2−1の消費電力や、GPS衛星1から送信される電波の受信状態など様々な理由により自無線通信装置2−1のGPS機能を休止させている場合も考えられる。この場合、決定部206は、無線通信装置2−1分担は無く、無線通信装置2−2〜2−3のみに各GPS衛星1をサーチするように分担を決定するようにしてもよい。
【0038】
(ステップS305)起動動作を行う無線端末装置2は、他の無線通信装置2と時刻同期を行う処理である時刻同期処理を開始する。その後、ステップS306の処理に進む。時刻同期処理は、GPS衛星1のサーチを分担した無線通信装置2の間で時刻情報の同期を行うために行う。具体的には、自無線通信装置2のローカル時刻を基準とし、他の無線通信装置2が持つローカル時刻を自無線通信装置2のローカル時刻に同期させる。時刻同期処理の詳細については後述する。
【0039】
(ステップS306)C/Aコード同期検出部202は、自無線通信装置2が分担するGPS衛星1に対してC/Aコード同期検出処理を行う。その後、ステップS307の処理に進む。GPS衛星1はそれぞれ固有のC/Aコードを持っており、GPS衛星1から送出される航法メッセージ11はこのC/Aコードで変調されている。GPS衛星1から送出される航法メッセージ11を復調するためには、受信したメッセージがどのC/Aコードで変調されているのか検出する必要があるのでC/Aコード同期検出処理を行う。
【0040】
なお、C/Aコードは1.023MHzの周波数で1023個の乱数で構成されているため、1つのGPS衛星1を検出するためには一般的にC/Aコード1パターンに対して位相をずらしながら検出する必要がある。従って、各無線通信装置2が検出しなければならないGPS衛星1の数が減れば、それだけC/Aコード同期検出処理に掛かる時間を短縮することが可能となる。すなわち、C/Aコード同期検出処理を複数の無線通信装置2で分担して行えば、C/Aコード同期検出処理に掛かる時間を短縮することが可能となる。
【0041】
(ステップS307)C/Aコード同期検出部202は、ステップS306の処理でGPS衛星1を検出したか否かを判定する。GPS衛星1を検出したとC/Aコード同期検出部202が判定した場合にはステップS308の処理に進み、それ以外の場合にはステップS305の処理に戻る。なお、ステップS305の処理に戻り、ステップS306の処理で再度C/Aコード同期検出処理を行う場合、先ほどのC/Aコード同期検出処理で検出を試みたC/Aコードのパターンとは違うC/Aコードのパターンを、自無線通信装置2に分担されたGPS衛星1のC/Aコードのパターンから選択して処理を行う。
【0042】
(ステップS308)RF部201は、C/Aコード同期検出部202が検出したGPS衛星1から送出される航法メッセージ11を受信する。そして、データ復調部203は復調化処理を行い、RF部201が受信した航法メッセージ11を復調する。その後、ステップS309の処理に進む。この処理により、無線通信装置2は、自装置に割り当てられたGPS衛星1から送出される航法メッセージ11を取得することができる。
【0043】
(ステップS309)通信部204は、他の無線通信装置2から送信されるGPS衛星1の航法メッセージ11と航法メッセージ受信時刻とを含むデータを受信する。その後、ステップS310の処理に進む。この処理により、無線通信装置2は、複数のGPS衛星1から送出される航法メッセージ11を取得することができる。なお、他の無線通信装置2から送信されるGPS衛星1の航法メッセージ11と航法メッセージ受信時刻とを含むデータを受信する処理は、ステップS304の処理を終了した後、GPS衛星1のサーチ処理と並列して開始しておくことが望ましい。
【0044】
(ステップS310)測位演算部209は、ステップS308の処理とステップS309の処理とで取得した航法メッセージ11を用いて測位演算を行うことが出来るか否かを判定する。取得した航法メッセージ11を用いて測位演算を行うことができると判定した場合にはステップS311の処理に進み、それ以外の場合にはステップS314の処理に進む。ここで、GPSの測位演算をするためには、一般的に4つのGPS衛星1から送出される航法メッセージ11を受信することが必要である。従って、測位演算部209は、4つ以上のGPS衛星1から送出される航法メッセージ11を取得したか否かを判定し、4つ以上のGPS衛星1から送出される航法メッセージ11を取得した場合、取得した航法メッセージ11を用いて測位演算を行うことができると判定する。
【0045】
(ステップS311)測位演算部209は、ステップS308の処理とステップS309の処理とで取得した航法メッセージを用いて測位演算を行う。その後、ステップS312の処理に進む。
(ステップS312)測位演算部209は、ステップS311の処理で得られた演算結果を記録部208に記録する。その後、ステップS313の処理に進む。
(ステップS313)C/Aコード同期検出部202は、自無線通信装置2だけで測位を継続できるように、他の無線通信装置2が検出に成功したGPS衛星1に対してサーチを開始する。その後、ステップS314の処理に進む。
【0046】
(ステップS314)指示部207は、自無線通信装置2に割り当てた全てのGPS衛星1のサーチは完了したか否かを判定する。自無線通信装置2に割り当てた全てのGPS衛星1のサーチは完了したと指示部207が判定した場合にはステップS315の処理に進み、それ以外の場合にはステップS305の処理に戻る。
(ステップS315)指示部207は、他の無線通信装置2に割り当てた全てのGPS衛星1の航法メッセージ11を取得したか否かを判定する。他の無線通信装置2に割り当てた全てのGPS衛星1の航法メッセージ11を取得したと指示部207が判定した場合にはステップS316の処理に進み、それ以外の場合にはステップS310の処理に戻る。
(ステップS316)指示部207は、GPS測位処理を中止する。その後、ステップS317の処理に進む。
【0047】
(ステップS317)指示部207は、通信部204を介して、GPS測位処理の終了を示す測位終了メッセージを他の無線通信装置2に対して送信する。その後、処理を終了する。
(ステップS318)無線通信装置2は、通常のGPS測位処理を行う。その後、処理を終了する。例えば、ステップS302の処理で送信する検索メッセージの応答メッセージの受信待機時にタイムアウトを設けておき、応答メッセージが返ってこなければ通常のGPS測位処理を行う。
【0048】
上述したステップS301〜ステップS318の処理を実行することで、起動動作を行う無線通信装置2は、GPS衛星1から送出される航法メッセージ11を他の無線通信装置2に取得させることができる。また、起動動作を行う無線通信装置2は、他の無線通信装置2が取得した航法メッセージ11と自無線通信装置2が取得した航法メッセージ11とを用いて測位を行うことができる。
【0049】
次に、起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2(図1に示す例では、無線通信装置2−2〜2−3)の動作手順について説明する。図4は、本実施形態において、起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2の動作手順を示したフローチャートである。
【0050】
(ステップS401)起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2の通信部204は、起動動作を行う無線通信装置2から送信される検索メッセージを受信する。その後、ステップS402の処理に進む。
(ステップS402)指示部207は、自無線通信装置2のGPS機能を共有するか否かを判定する。自無線通信装置2のGPS機能を共有すると指示部207が判定した場合にはステップS403の処理に進み、共有しないと判定した場合には処理を終了する。GPS機能を共有しないと判定する場合としては、例えば自無線通信装置2のGPS機能をOFFにしている場合などがある。
【0051】
(ステップS403)指示部207は、起動動作を行う無線通信装置2に対して、GPS機能を共有することを通知する応答メッセージを、通信部204を介して送信する。その後、ステップS404の処理に進む。なお、応答メッセージを受信した起動動作を行う無線通信装置2は、図3で説明したように、各無線通信装置2がサーチするGPS衛星1の分担を決定し、他の無線通信装置2に対して取得指示メッセージを送信する。
(ステップS404)通信部204は、起動動作を行う無線通信装置2から送信される取得指示メッセージを受信する。その後、ステップS405の処理に進む。
【0052】
(ステップS405)起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2は、起動動作を行う無線端末装置2と時刻同期を行う処理である時刻同期処理を開始する。その後、ステップS406の処理に進む。時刻同期処理の詳細については後述する。
(ステップS406)C/Aコード同期検出部202は、ステップS404の処理で受信した取得指示メッセージで指示されたGPS衛星1に対してC/Aコード同期検出処理を行う。その後、ステップS407の処理に進む。
【0053】
(ステップS407)C/Aコード同期検出部202は、ステップS406の処理でGPS衛星1を検出したか否かを判定する。GPS衛星1を検出したとC/Aコード同期検出部202が判定した場合にはステップS408の処理に進み、それ以外の場合にはステップS405の処理に戻る。なお、ステップS405の処理に戻り、再度ステップS406の処理でC/Aコード同期検出処理を行う場合、先ほどのC/Aコード同期検出処理で検出を試みたC/Aコードのパターンとは違うC/Aコードのパターンを、自無線通信装置2に分担されたGPS衛星1のC/Aコードのパターンから選択して処理を行う。
【0054】
(ステップS408)RF部201は、C/Aコード同期検出部202が検出したGPS衛星1から送出される航法メッセージ11を受信する。そして、データ復調部203は復調化処理を行い、RF部201が受信した航法メッセージ11を復調する。その後、ステップS409の処理に進む。この処理により、無線通信装置2は、自装置に割り当てられたGPS衛星1から送出される航法メッセージ11を取得することができる。
【0055】
(ステップS409)指示部207は、データ復調部203が復調した航法メッセージ11に、自無線通信装置2のローカル時刻を基準にした航法メッセージ11の受信時刻情報を含めて、起動動作を行う無線通信装置2に対して通信部204を介して送信する。その後、ステップS410の処理に進む。
(ステップS410)指示部207は、ステップS409の処理で航法メッセージ11を送信した後、起動動作を行う無線通信装置2から測位終了メッセージを受信したか否かを判定する。測位終了メッセージを受信したと指示部207が判定した場合にはステップS411の処理に進み、それ以外の場合にはステップS405の処理に戻る。
(ステップS411)指示部207は、GPS測位処理を中止する。その後、処理を終了する。
【0056】
上述したステップS401〜ステップS411の処理を実行することで、起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2は、起動動作を行う無線通信装置2からの要求に応じてGPS衛星1から送出される航法メッセージ11を取得し、起動動作を行う無線通信装置2に対して取得した航法メッセージ11を送信することができる。
【0057】
次に、無線通信装置2の間での時刻同期について説明する。無線通信装置2は、GPS衛星1が送出する航法メッセージ11を基に測位演算を行う際、航法メッセージ11を受信した時刻が必要となる。GPS衛星1が送出する航法メッセージ11には、GPS衛星1が航法メッセージ11を送出した時刻が記録されている。そのため、仮に無線通信装置2がGPS衛星1と完全に時刻情報の同期が取れていれば、GPS衛星1と無線通信装置2との間の距離を簡単に求めることができる。しかしながら、無線通信装置2には、GPS衛星1に搭載されているような高精度なクロックが搭載されておらず、GPS衛星1のGPS時刻と同期することは不可能である。従って、測位演算の際、GPS衛星1と無線通信装置2との時刻の誤差も同時に求める必要がある。本実施形態では、複数のGPS衛星1が送出する航法メッセージ11を複数の無線通信装置2で分担して取得し、そのうちの1つの無線通信装置2で測位演算を行うため、複数の無線通信装置2の間で基準時刻を揃えておく必要がある。
【0058】
次に、起動動作を行う無線端末装置2が、他の無線通信装置2と時刻の同期を行う時刻同期処理について説明する。図5は、本実施形態において、起動動作を行う無線通信装置2の時刻同期処理の処理手順を示したフローチャートである。なお、無線通信では、通信に掛かる伝送時間がまちまちである。従って、単純に自無線通信装置2から他の無線通信装置2に対して時刻情報を送信しても、他の無線通信装置2が時刻情報を受信した時には伝送時間分の誤差が生じるため、伝送時間を考慮することで無線通信装置2の間の基準時刻を設定することが可能になる。
【0059】
(ステップS701)起動動作を行う無線通信装置2の指示部207は、他の無線通信装置2に対して、伝送時間を示す伝送時間情報を送信済みであるか否かを判定する。他の無線通信装置2に対して伝送時間情報を送信済みであると指示部207が判定した場合にはステップS705の処理に進み、それ以外の場合にはステップS702の処理に進む。
【0060】
(ステップS702)指示部207は、他の無線通信装置2に対して、自無線通信装置2のローカル時刻と送信周期情報とを含む同期メッセージを送信する。また、指示部207は、同期メッセージを送信したローカル時刻を記録部208に記録する。その後、ステップS703の処理に進む。なお、起動動作を行う無線通信装置2は、時刻同期のために周期的に同期メッセージを送信する。送信周期情報は、同期メッセージを送信する周期を示す情報である。例えば、起動動作を行う無線通信装置2は、同期メッセージを周期10msで送信する場合、他の無線通信装置2に対して、周期10msを示す送信周期情報を送信する。
【0061】
(ステップS703)通信部204は、他の無線通信装置2から送信される同期メッセージに対応する応答メッセージを受信する。なお、応答メッセージには、他の無線通信装置2における処理時間を示す処理時間情報が含まれている。他の無線通信装置2における処理時間は、他の無線通信装置2が同期メッセージを受信してから応答メッセージを送信するまでに掛かった時間のことである。また、指示部207は、通信部204が応答メッセージを受信したローカル時刻を記録部208に記録する。その後、ステップS704の処理に進む。
【0062】
(ステップS704)指示部207は、同期メッセージを送信した時刻と、応答メッセージを受信した時刻と、応答メッセージに含まれる処理時間情報を用いて、以下の(1)式で送信または受信に掛かる伝送時間を求める。その後、ステップS705の処理に進む。
伝送時間=(応答メッセージの受信時刻−同期メッセージを送信した時刻−他の無線通信装置2における処理時間)/2・・・(1)
【0063】
(ステップS705)指示部207は、自無線通信装置2のローカル時刻と、送信周期情報と、ステップS704の処理で算出した伝送時間情報とを含む同期メッセージを、送信周期となった場合に他の無線通信装置2に対して送信する。その後、図3のステップS306の処理に進む。なお、指示部207は、時刻同期処理を、GPS衛星1の検出処理と並列で周期的に実行しており、他の無線通信装置2に対して送信周期毎に同期メッセージを送信する。
【0064】
次に、起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2が、起動動作を行う無線通信装置2と時刻の同期を行う時刻同期処理について説明する。図6は、本実施形態において、起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2の時刻同期処理の処理手順を示したフローチャートである。
【0065】
(ステップS801)起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2の指示部207は、起動動作を行う無線通信装置2から、伝送時間を示す伝送時間情報を受信済みであるか否かを判定する。伝送時間情報を受信済みであると指示部207が判定した場合にはステップS804の処理に進み、それ以外の場合にはステップS802の処理に進む。
(ステップS802)通信部204は、起動動作を行う無線通信装置2から送信される、起動動作を行う無線通信装置2のローカル時刻と送信周期情報とを含む同期メッセージを受信する。その後、ステップS803の処理に進む。
【0066】
(ステップS803)指示部207は、通信部204が受信した同期メッセージに含まれる、起動動作を行う無線通信装置2のローカル時刻を記録部208に記録する。また、指示部207は、内部クロック生成部211が生成するクロックとカウンタ212を用いて、起動動作を行う無線通信装置2のローカル時刻を進める。すなわち、起動動作を行う無線通信装置2に対して航法メッセージ11を送信する無線通信装置2において、起動動作を行う無線通信装置2のローカル時刻と同期した時刻がカウントされる。この時刻を基準時刻とする。これにより、起動動作を行う無線通信装置2と、起動動作を行う無線通信装置2に航法メッセージ11を送信する無線通信装置2とは、伝送時間の誤差はあるものの基準時刻を同じように進めることが可能になる。また、指示部207は、同期メッセージを受信してから応答メッセージを送信するまでに掛かった時間である処理時間を含む応答メッセージを、起動動作を行う無線通信装置2に対して、通信部204を介して送信する。その後、ステップS804の処理に進む。
【0067】
(ステップS804)通信部204は、起動動作を行う無線通信装置2から送信される、起動動作を行う無線通信装置2のローカル時刻と、送信周期情報と、伝送時間情報とを含む同期メッセージを受信する。その後、ステップS805の処理に進む。
(ステップS805)指示部207は、ステップS804で受信した同期メッセージに含まれる送信周期情報と伝送時間情報を用いて、次に同期メッセージが送信される時刻を算出する。その後、ステップS806の処理に進む。具体的には、指示部207は、自無線通信装置2が同期メッセージを受信した後、同期メッセージに含まれる送信周期から伝送時間を差し引いた時刻後に、次に同期メッセージが送信されると算出する。
【0068】
(ステップS806)本実施形態では、ステップS805で算出した次に同期メッセージが送信される時刻は、起動動作を行う無線通信装置2が同期メッセージを送信する送信時刻と同期していると仮定する。指示部207は、実際に次の同期メッセージを受信した時、予測した同期メッセージの受信時刻よりも、実際に同期メッセージを受信した時刻の方が早いか否かを判定する。予測した同期メッセージの受信時刻よりも、実際に同期メッセージを受信した時刻の方が早いと指示部207が判定した場合にはステップS807の処理に進み、それ以外の場合には処理を終了する。
(ステップS807)指示部207は、メッセージの伝送時間を更新し、基準時刻を補正する。その後、処理を終了する。なお、指示部207は、時刻同期処理を、GPS衛星1の検出処理と並列で周期的に実行する。
【0069】
例えば、最初に求めた伝送時間が10msで、次に同期メッセージを受信した時、予測受信タイミングよりも3ms早く同期メッセージを受信した場合、実際の伝送時間は7msであることが分かる。従って、起動動作を行う無線通信装置2に航法メッセージ11を送信する無線通信装置2でカウントを続けている基準時刻は、起動動作を行う無線通信装置2のローカル時刻から7ms差し引きすることで、より正確に基準時刻の同期を行うことができる。
【0070】
また、例えば、最初に求めた伝送時間が10msで、次に同期メッセージを受信した時、予測受信タイミングより8ms遅く同期メッセージを受信した場合、実際の伝送時間は18msであることが分かる。しかしながら、伝送時間が小さい時の方がより正確な基準時刻を求めることができるため、予測受信タイミングよりも同期メッセージを遅く受信した時は、メッセージの伝送時間と基準時刻との補正を行わない。
【0071】
上述したステップS701〜ステップS705の処理、およびステップS801〜807の処理を実行することで、各無線通信装置2の基準時刻の同期を行うことができる。
【0072】
次に、図3,図4を用いて説明した処理における、無線通信装置2の間のメッセージの流れについて説明する。図7は、本実施形態における無線通信装置2の間でのメッセージの流れを示したシーケンス図である。図示する例では、無線通信装置2−1は、起動動作を行う無線通信装置2である。また、無線通信装置2−2〜2−3は、起動動作を行う無線通信装置2に航法メッセージ11を送信する無線通信装置2である。
【0073】
最初に無線通信装置2−1は、無線通信装置2−2〜2−3に対して検索メッセージを送信する(M901)。無線通信装置2−2〜2−3は応答メッセージを無線通信装置2−1に対して送信する(M902)。無線通信装置2−1は、各無線通信装置2−1〜203がサーチするGPS衛星1の分担を行い(S304)、取得指示メッセージを無線通信装置2−2〜2−3に対して送信する(M903)。
【0074】
続いて、無線通信装置2−1は、無線通信装置2−1〜2−3間で時刻を同期するために同期メッセージを送信する(M904)。無線通信装置2−2〜2−3は、それぞれ処理時間を含む応答メッセージを無線通信装置2−1に対して送信する(M905)。無線通信装置2−1〜2−3は、それぞれ割り当てられたサーチすべきGPS衛星1のサーチを開始する(S306,S406)。
【0075】
GPS衛星1のサーチ処理の間で、無線通信装置2−1は同期メッセージを周期的に送信し続ける(M906)。無線通信装置2−2〜2−3は、割り当てられたGPS衛星1を検出して航法メッセージ11を受信した後、無線通信装置2−1に対して、航法メッセージ11と無線通信装置2−1のローカル時刻を基準とした受信時刻を含むデータとを送信する(M907)。無線通信装置2−1は、航法メッセージ11と受信時刻を含むデータとを受信し、測位演算を行う(S311)。無線通信装置2−1は、測位演算完了後、無線通信装置2−2〜2−3に対して測位終了メッセージを送信する(M908)。
【0076】
次に、図5,図6を用いて説明した時刻同期処理における、無線通信装置2との間のメッセージの流れについて説明する。図8は、本実施形態において、時刻同期処理における無線通信装置2の間でのメッセージの流れを示したシーケンス図である。図示する例では、無線通信装置2−1は、起動動作を行う無線通信装置2である。また、無線通信装置2−Nは、起動動作を行う無線通信装置2に航法メッセージ11を送信する無線通信装置2である。
【0077】
図示するように、無線通信装置2−1は、同期メッセージを周期Tで送信する。この周期Tで送信する送信タイミングをそれぞれTs1、Ts2、Ts3、・・・とする。まず、無線通信装置2−1はM904の同期メッセージを送信する。無線通信装置2−Nは同期メッセージを受信する。この受信時刻は、無線通信装置2−1が同期メッセージを送信した時刻よりも伝送時間分送れている。無線通信装置2−Nは、受信した同期メッセージから無線通信装置2−1のローカル時刻を取得するなどの内部処理を実行後、応答メッセージを送信する。このとき、無線通信装置2−Nは、内部処理を行う際、処理時間tprocの時間を要する。無線通信装置2−1が最初の同期メッセージを送信してから応答メッセージを受信するまでに掛かる時間を経過時間ttotalとすると、上述した(1)式を用いて伝送時間ttrans1を算出することができる。
【0078】
次に、無線通信装置2−1がM906の同期メッセージを送信するとき、無線通信装置2−Nは、M904の同期メッセージを受信してから周期T経過後の受信タイミングTR1を期待している。算出した伝送時間ttrans1を考慮することで、無線通信装置2−NはM906の同期メッセージの送信タイミングを予測することが可能である。つまり、無線通信装置2−1が同期メッセージを送信するタイミングを同定することになり、無線通信装置2−Nは、基準時刻を無線通信装置2−1のローカル時刻に同期させることが可能になる。例えば、無線通信装置2−Nは、実際に同期メッセージを受信タイミングTR2に受信した場合、伝送時間はttrans2であると予測できる。この伝送時間ttrans2は、無線通信装置2−Nで予測する送信タイミングTS2を基準として同期メッセージの受信時刻を比較し、その差分として算出する。
【0079】
次に、無線通信装置2−1が、送信タイミングTS3でM906の同期メッセージ送信する場合、無線通信装置2−Nは、先ほど同期メッセージを受信した受信タイミングTR2から周期T後の受信タイミングTR3に同期メッセージを受信すると予測する。図示するように、無線通信装置2−1が同期メッセージを送信してから、無線通信装置2−Nが同期メッセージを受信するまでに、周期T+伝送時刻ttrans3だけ時間が掛かった場合、ttrans3>ttrans2であるため、この伝送時間ttrans3は以降の処理に反映させない。無線通信における伝送時間にはバラツキはあるが、伝送時間が小さいものを用いて補正を繰り返すことで、より精度の高い時刻同期を行うことが可能になる。以上の処理を行うことにより、無線通信装置2の間で基準時刻の同期を行うことが可能になる。
【0080】
上述した通り、本実施形態によれば、起動動作を行う無線通信装置2は、初めて自装置の現在位置の測位を開始する時、通信部204の通信範囲101に存在する他の無線通信装置2を検索して特定する。そして、起動動作を行う無線通信装置2は、特定した無線通信装置2と自装置のうち、どの装置がどのGPS衛星1−1〜1−4の補足を行うか決定する。その後、起動動作を行う無線通信装置2は、他の無線通信装置2に対して、決定したGPS衛星1の航法メッセージ11の取得を指示するメッセージを送信する。
【0081】
他の無線通信装置2は、起動動作を行う無線通信装置2が決定したGPS衛星1の航法メッセージ11を取得する。そして、他の無線通信装置2は、取得した航法メッセージ11を、起動動作を行う無線通信装置2に対して送信する。起動動作を行う無線通信装置2は、自装置と他の無線通信装置2とが取得したGPS衛星1の航法メッセージ11を用いて測位演算を行う。
【0082】
従って、GPS衛星1−1〜1−4が送出す航法メッセージ11−1〜11−4を複数の無線通信装置2−1〜2−3で分担して取得し、取得した航法メッセージ11−1〜11−4を用いて測位演算を行うことで、1台の無線通信装置2のみで航法メッセージ11−1〜11−4を取得し測位演算するよりも、GPS衛星1のサーチ時間を短縮し、測位時間をより短縮することができる。
【0083】
以上、この発明の一実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0084】
1,1−1〜1−4・・・GPS衛星、2,2−1〜2−3,2−N・・・無線通信装置、11・・・航法メッセージ、201・・・RF部、202・・・コード同期検出部、203・・・データ復調部、204・・・通信部、205・・・検索部、206・・・決定部、207・・・指示部、208・・・記録部、209・・・測位演算部、210・・・制御部、211・・・内部クロック生成部、212・・・カウンタ
【特許請求の範囲】
【請求項1】
GPS衛星から送信される航法メッセージの取得を周辺端末に対して指示する指示部と、
前記周辺端末が取得した前記航法メッセージを当該周辺端末から取得する取得部と、
前記周辺端末から取得した前記航法メッセージを用いて測位演算を行う演算部と、
を有することを特徴とする無線通信装置。
【請求項2】
複数の前記GPS衛星の中から前記周辺端末に割り当てる前記GPS衛星を決定する決定部を更に有し、
前記指示部は、前記GPS衛星を割り当てた前記周辺端末に対して当該GPS衛星から送信される前記航法メッセージの取得を指示する
ことを特徴とする請求項1に記載の無線通信装置。
【請求項3】
自装置と時刻の同期を取るための同期メッセージを前記周辺端末に対して送信する通信部を更に有する
ことを特徴とする請求項1または請求項2のいずれか1項に記載の無線通信装置。
【請求項4】
前記通信部は、自装置と前記周辺端末との間のデータ伝送にかかる時間を示す情報を含む前記同期メッセージを送信する
ことを特徴とする請求項3に記載の無線通信装置。
【請求項5】
前記GPS衛星から前記航法メッセージを受信する受信部を更に有し、
前記演算部は、前記取得部が取得した前記航法メッセージと前記受信部が受信した前記航法メッセージとを用いて前記測位演算を行う
ことを特徴とする請求項1から請求項3のいずれか1項に記載の無線通信装置。
【請求項6】
前記指示部は、複数の前記周辺端末に対して前記指示を行い、
前記取得部は、複数の前記周辺端末から前記航法メッセージを取得し、
前記演算部は、複数の前記周辺端末から取得した前記航法メッセージを用いて測位演算を行う
ことを特徴とする請求項1から請求項3のいずれか1項に記載の無線通信装置。
【請求項7】
無線通信を用いて自装置の周囲に存在する前記周辺端末を検索し特定する検索部を更に有し、
前記指示部は、前記検索部が特定した前記周辺端末に対して前記GPS衛星から送信される前記航法メッセージの取得を指示する
ことを特徴とする請求項1または請求項2のいずれか1項に記載の無線通信装置。
【請求項1】
GPS衛星から送信される航法メッセージの取得を周辺端末に対して指示する指示部と、
前記周辺端末が取得した前記航法メッセージを当該周辺端末から取得する取得部と、
前記周辺端末から取得した前記航法メッセージを用いて測位演算を行う演算部と、
を有することを特徴とする無線通信装置。
【請求項2】
複数の前記GPS衛星の中から前記周辺端末に割り当てる前記GPS衛星を決定する決定部を更に有し、
前記指示部は、前記GPS衛星を割り当てた前記周辺端末に対して当該GPS衛星から送信される前記航法メッセージの取得を指示する
ことを特徴とする請求項1に記載の無線通信装置。
【請求項3】
自装置と時刻の同期を取るための同期メッセージを前記周辺端末に対して送信する通信部を更に有する
ことを特徴とする請求項1または請求項2のいずれか1項に記載の無線通信装置。
【請求項4】
前記通信部は、自装置と前記周辺端末との間のデータ伝送にかかる時間を示す情報を含む前記同期メッセージを送信する
ことを特徴とする請求項3に記載の無線通信装置。
【請求項5】
前記GPS衛星から前記航法メッセージを受信する受信部を更に有し、
前記演算部は、前記取得部が取得した前記航法メッセージと前記受信部が受信した前記航法メッセージとを用いて前記測位演算を行う
ことを特徴とする請求項1から請求項3のいずれか1項に記載の無線通信装置。
【請求項6】
前記指示部は、複数の前記周辺端末に対して前記指示を行い、
前記取得部は、複数の前記周辺端末から前記航法メッセージを取得し、
前記演算部は、複数の前記周辺端末から取得した前記航法メッセージを用いて測位演算を行う
ことを特徴とする請求項1から請求項3のいずれか1項に記載の無線通信装置。
【請求項7】
無線通信を用いて自装置の周囲に存在する前記周辺端末を検索し特定する検索部を更に有し、
前記指示部は、前記検索部が特定した前記周辺端末に対して前記GPS衛星から送信される前記航法メッセージの取得を指示する
ことを特徴とする請求項1または請求項2のいずれか1項に記載の無線通信装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−88344(P2013−88344A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−230675(P2011−230675)
【出願日】平成23年10月20日(2011.10.20)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月20日(2011.10.20)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]