
無線LAN測位とGPS測位とを併用した移動体の連続的測位方法及び装置、並びに移動体の連続的測位プログラム
【課題】屋内外を移動する移動体の測位をGPS測位と無線LAN測位とを併用して行うにあたって、リアルタイム処理を可能とし、屋内外で連続して測位できる無線LAN測位とGPS測位とを併用した移動体の連続的測位方法及び装置、並びに移動体の連続的測位プログラムを提案する。
【解決手段】ある時点の融合結果の計算には、それ以前の無線LAN測位の結果、GPS測位の結果、及びGPS測位に付随して得られるDOPのみを使用することによりリアルタイム処理を可能にした。また、「無線LAN測位の結果とGPS測位の結果の重み付き平均」に替えて、理論的根拠が明確な重みを用いた重み付き平均を採用した。
【解決手段】ある時点の融合結果の計算には、それ以前の無線LAN測位の結果、GPS測位の結果、及びGPS測位に付随して得られるDOPのみを使用することによりリアルタイム処理を可能にした。また、「無線LAN測位の結果とGPS測位の結果の重み付き平均」に替えて、理論的根拠が明確な重みを用いた重み付き平均を採用した。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、移動体の測位技術に関し、特に、移動体が屋内外を移動している場合に、シームレスに移動体を測位できる移動体の連続的測位方法及び装置に関する。
【背景技術】
【0002】
従来から、主に屋外で有効な測位方法としては、GPS測位が一般的である。GPS(全地球測位システム)は衛星を使用した位置決定システムで、その測位方式には、大きく分けて、GPS受信機を1台だけ用いる単独測位方式と、2台以上用いる相対測位方式がある。相対測位方式にはDGPS(Differential GPS)方式と、干渉測位方式がある。DGPS方式は、2台の受信機を座標既知点と未知点に設置して座標既知点で測定誤差を求め、それによって未知点での測位誤差を改善する方式である。高感度GPSは、単独測位方式の一種で、屋外においては通常の単独測位方式と同程度の測位ができ、通常GPSが利用できない屋内においても測位誤差が増大するもののある程度測位が可能な方式である。DGPS方式は、高感度GPSと比べ、測位できない場合が多いが、精度は高い。干渉測位方式は、DGPSより更に測位できない場合が多いが、精度も更に高い。
【0003】
DOP(Dilution of precision,精度低下率)は、測位誤差を評価する指標であり、GPSの測位結果と同時に得られる。GPSの測位誤差は、擬似距離の計測誤差とDOPの積と見積もられる。DOPの値は常に正であり、値が大きいほど誤差が大きい。
【0004】
一方、主に屋内で有効な測位方法として、従来から、無線LAN測位がある。無線LAN測位は、座標既知点に存在している複数のアクセスポイントと移動体(端末、例えば、無線LAN機能を有するPDAなど)との間の距離を計算し、移動体の位置を求める。
【0005】
移動体の測位技術を歩行者ナビゲーション等に応用する場合、屋内外で連続して測位できるようにすることが重要になる。
【0006】
そこで、GPS測位と無線LAN測位とを適切に組み合わせることによって、屋内外を問わず、連続して(シームレスに)測位を行うことが提案されている。
【0007】
例えば、日本写真測量学会年次学術講演会(2004年6月17〜18日)発表論文集の25〜26頁には、無線LAN測位の結果とGPS測位の結果を組み合わせ、連続的な測位を実現するための方法として、無線LAN測位結果とGPS測位結果の融合アルゴリズムが提案されている。
【特許文献1】特開2002−14152
【非特許文献1】日本写真測量学会年次学術講演会(2004年6月17〜18日)発表論文集 25〜26頁
【発明の開示】
【発明が解決しようとする課題】
【0008】
前述した非特許文献1に記載されているアルゴリズムは、ある時点の融合結果の計算に、将来の無線LAN測位の結果及びGPS測位の結果も用いているため、リアルタイムで融合計算を行うことができないものであった。また、無線LAN測位の結果とGPS測位の結果の重み付き平均を採用しているが、重みの理論的根拠は、不明確であった。
【0009】
この発明は、屋内外を移動する移動体の測位をGPS測位と無線LAN測位とを併用して行うにあたって、リアルタイム処理を可能とし、屋内外で連続して測位できる無線LAN測位とGPS測位とを併用した移動体の連続的測位方法及び装置、並びに移動体の連続的測位プログラムを提案することを目的にしている。
【課題を解決するための手段】
【0010】
前記の目的を達成するため、本発明が提案する発明は以下の通りのものである。
【0011】
請求項1に係る発明
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出するステップと、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出するステップと、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出するステップと、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成するステップ
を備えた無線LAN測位とGPS測位とを併用した移動体の連続的測位方法。
【0012】
請求項2に係る発明
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出するステップと、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出するステップと、
直前の移動体の測位結果を現在の測位結果として利用する際の精度を、直前の移動体の測位結果の精度と、予め定められている移動体の移動速度に基づいて算出するステップと、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出するステップと、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとし、
直前の移動体の測位結果を現在の測位結果として利用する際の精度の2乗の逆数を、直前の移動体の測位結果の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値と、直前の移動体の測位結果とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成するステップと、
次の時点の測位結果情報を生成するために、(数4)により、現在の測位結果の精度を算出するステップと
を備えた無線LAN測位とGPS測位とを併用した移動体の連続的測位方法。
【数4】

【0013】
請求項3に係る発明
現在における移動体の測位結果として生成された移動体の測位結果情報における平均遅延時間を算出し、現在における移動体の測位結果として生成された移動体の測位結果情報に、屋外においては前記GPS受信機と同程度の測位を行うことができると共に、前記GPS受信機が利用できない屋内においても測位が可能な方式による高感度GPS受信機によって得た現在と当該平均遅延時間だけ前の時点における移動体の測位結果の差を加算し、これを現在における移動体の測位結果として移動体の測位結果情報を生成するステップを更に含むことを特徴とする請求項1又は2記載の無線LAN測位とGPS測位とを併用した移動体の連続的測位方法。
【0014】
以上の請求項1〜3に係る本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位方法は、パーソナルコンピュータなどの汎用コンピュータや、専用コンピュータのCPUなどからなる処理部が、本発明のコンピュータプログラムの指示の下に前述した本発明の方法における各ステップに対応する処理動作を実行することによって実現されている本発明の下記の無線LAN測位とGPS測位とを併用した移動体の連続的測位装置によって実施されるものである。
【0015】
請求項4に係る発明
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する第一の算出手段と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する第二の算出手段と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する第三の算出手段と、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成する第十三の移動体の測位結果情報生成手段
を備えた無線LAN測位とGPS測位とを併用した移動体の連続的測位装置。
【0016】
請求項5に係る発明
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する第十四の算出手段と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する第十五の算出手段と、
直前の移動体の測位結果を現在の測位結果として利用する際の精度を、直前の移動体の測位結果の精度と、予め定められている移動体の移動速度に基づいて算出する第六の算出手段と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する第七の算出手段と、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとし、
直前の移動体の測位結果を現在の測位結果として利用する際の精度の2乗の逆数を、直前の移動体の測位結果の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値と、直前の移動体の測位結果とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成する第十四の移動体の測位結果情報生成手段と、
次の時点の測位結果情報を生成するために、(数5)により、現在の測位結果の精度を算出する第八の算出手段と
を備えた無線LAN測位とGPS測位とを併用した移動体の連続的測位装置。
【数5】
【0017】
請求項6に係る発明
現在における移動体の測位結果として生成された移動体の測位結果情報における平均遅延時間を算出し、現在における移動体の測位結果として生成された移動体の測位結果情報に、屋外においては前記GPS受信機と同程度の測位を行うことができると共に、前記GPS受信機が利用できない屋内においても測位が可能な方式による高感度GPS受信機によって得た現在と当該平均遅延時間だけ前の時点における移動体の測位結果の差を加算し、これを現在における移動体の測位結果として移動体の測位結果情報を生成する第十五の移動体の測位結果情報生成手段を更に含むことを特徴とする請求項4又は5記載の無線LAN測位とGPS測位とを併用した移動体の連続的測位装置。
【0018】
パーソナルコンピュータなどの汎用コンピュータや、専用コンピュータなどからなる以上の請求項4〜6に係る本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位装置におけるCPUなどの処理部に、前述した本発明の方法における各ステップに対応する処理動作を実行させる本発明のコンピュータプログラムは、以下の通りのものである。
【0019】
請求項7に係る発明
コンピュータに、
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する第一の算出機能と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する第二の算出機能と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する第三の算出機能と、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成する第十三の移動体の測位結果情報生成機能と
を実現させる無線LAN測位とGPS測位とを併用した移動体の連続的測位プログラム。
【0020】
請求項8に係る発明
コンピュータに、
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する第四の算出機能と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する第五の算出機能と、
直前の移動体の測位結果を現在の測位結果として利用する際の精度を、直前の移動体の測位結果の精度と、予め定められている移動体の移動速度に基づいて算出する第六の算出機能と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する第七の算出機能と、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとし、
直前の移動体の測位結果を現在の測位結果として利用する際の精度の2乗の逆数を、直前の移動体の測位結果の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値と、直前の移動体の測位結果とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成する第十四の移動体の測位結果情報生成機能と、
次の時点の測位結果情報を生成するために、(数6)により、現在の測位結果の精度を算出する第八の算出機能と
を実現させる無線LAN測位とGPS測位とを併用した移動体の連続的測位プログラム。
【数6】
【0021】
請求項9に係る発明
現在における移動体の測位結果として生成された移動体の測位結果情報における平均遅延時間を算出し、現在における移動体の測位結果として生成された移動体の測位結果情報に、高感度GPS受信機によって得た現在と当該平均遅延時間だけ前の時点における移動体の測位結果の差を加算し、これを現在における移動体の測位結果として移動体の測位結果情報を生成する第十五の移動体の測位結果情報生成機能を更にコンピュータに実現させることを特徴とする請求項7又は8記載の無線LAN測位とGPS測位とを併用した移動体の連続的測位プログラム。
【発明の効果】
【0022】
本案発明のアルゴリズムは、ある時点の融合結果の計算には、それ以前の無線LAN測位の結果、GPS測位の結果、及びGPS測位に付随して得られるDOPのみを使用しており、リアルタイム処理に適用できる。また、本願の請求項1〜9に係る発明は、前述した従来技術で採用していた「無線LAN測位の結果とGPS測位の結果の重み付き平均」に替えて、理論的根拠が明確な重みを用いた重みつき平均を採用しており、その根拠は明確である。
【0023】
本案発明を実データに適用した結果、写真測量学会で発表されたアルゴリズムより、精度が高いことが示された。
【発明を実施するための最良の形態】
【0024】
以下、添付図面を参照して本発明の好ましい実施の形態を説明する。
【0025】
本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム(装置)は、以下に説明する本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位方法をコンピュータに実行させるコンピュータプログラムの指示の下に所定の処理動作を行う汎用コンピュータあるいは、専用コンピュータなどからなる。
【実施例1】
【0026】
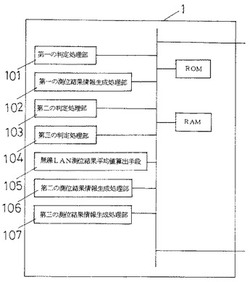
この本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、外部と有線又は無線での情報交信を行うインターフェース部からなる情報取得部で取得した、GPS受信機によって得た現在及び直前の一又は複数の時刻における移動体の測位結果のばらつきを判定する第一の判定処理部101を備えている。
【0027】
以下では、GPS受信機、無線LAN測位装置については1秒ごとにデータが得られる場合について説明する。
【0028】
また、GPS受信機の測位結果のばらつきを判定するために直前の3時点と現在のGPS受信機の測位結果を利用している一例を示す。
【0029】
更に、この実施例及び、以下の実施例では、無線LAN測位の有効範囲は座標軸に平行な矩形とする一例を示す。
【0030】
ただし、これ以外の形態でも本発明は実施可能である。
【0031】
本発明の移動体の連続的測位システム1がGPS受信機によって得た現在の時刻における移動体の測位結果を情報取得部で取得する(ステップ1001)。
【0032】
GPS受信機によって得た現在における移動体の測位結果を情報取得部で取得すると、その測位結果は、測位計測時刻と関連付けられて、コンピュータからなる本発明の移動体の連続的測位システム1の記憶部に記憶されて蓄積される。ここで、測位計測時刻と関連付けられて記憶部に記憶されるGPS受信機によって得た現在における移動体の測位結果の件数をあらかじめ定めてある件数にすることができる。本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システムが携帯電話等の資源の限られた機器に組み込まれる場合には、このように蓄積する件数を所定の数にすることが重要になる。
【0033】
こうして蓄積された過去の測位結果は、必要に応じて記憶部から取り出されて利用される。例えば、GPS受信機によって得た現在及び直前の一又は複数の時刻における移動体の測位結果のばらつきを判定する処理に利用される。
【0034】
また、本発明の移動体の連続的測位システム1が、無線LAN測位装置によって得た移動体の現在の時刻における移動体の測位結果を情報取得部で取得すると、その測位結果は、測位計測時刻と関連付けられて、コンピュータからなる本発明の移動体の連続的測位システム1の記憶部に記憶されて蓄積される。ここでも、測位計測時刻と関連付けられて記憶部に記憶される無線LAN測位装置によって得た移動体の現在の時刻における移動体の測位結果の件数をあらかじめ定められた件数にすることができる。
【0035】
こうして蓄積された過去の測位結果は、必要に応じて記憶部から取り出されて利用される。例えば、無線LAN測位装置によって得た移動体の現在の測位結果、又は現在及び直前の一つの時刻における移動体の測位結果、もしくは現在及び直前の複数の時刻における移動体の測位結果の中間値又は平均値を求める処理に利用される。
【0036】
ここでは、現在の時刻をt、GPS受信機によって得た現在の時刻における移動体の測位結果をXG(t)(座標はUTM座標系)(長さの単位はm、時間の単位は秒(本明細書における以下の説明においても同様とする))、GPS受信機によって得た直前の3時刻t−1、t−2、t−3における移動体の測位結果をそれぞれXG(t−1)、XG(t−2)、XG(t−3)と表示する。
【0037】
本発明の移動体の連続的測位システム1の記憶部には、前記の第一の判定処理部101によって、GPS受信機によって得た現在及び直前の一又は複数の時刻における移動体の測位結果のばらつきを判定する際に参照する、予め定められたばらつきの制限LAに関するデータが格納されている。
【0038】
本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、第一の測位結果情報生成処理部102を備えている。
【0039】
前記の第一の判定処理部101によって行われる、GPS受信機によって得た現在及び直前の一又は複数の時刻における移動体の測位結果のばらつきを判定する処理(ステップ1002)の結果、GPS受信機によって得た移動体の現在及び直前の一又は複数の時刻における測位結果のばらつきがいずれも予め定めてある範囲内である場合、当該第一の測位結果情報生成処理部102によって、前記GPS受信機によって得た現在の時刻tにおける測位結果XG(t)を現在における移動体の測位結果XR(t)として移動体の測位結果情報を生成する処理が行われる(ステップ1003)。
【0040】
前記の第一の判定処理部101によって行われる、GPS受信機によって得た現在及び直前の一又は複数の時刻における移動体の測位結果のばらつきを判定する処理(ステップ1002)は、この実施例のように、GPS受信機によって得た現在及び直前の3時刻における移動体の測位結果のばらつきを判定する場合には、例えば、以下の(数7)の条件が満たされるか否かを判定する処理として行われる。
【数7】
【0041】
前記のステップ1002における処理の結果、GPS受信機によって得た移動体の現在及び直前の一又は複数の時刻(この実施例の場合、直前の3時刻)における測位結果のばらつきがいずれも予め定めてある範囲内である場合、すなわち、前記の(数7)が成立する場合には、移動体の測位結果を表す移動体の測位結果情報XR(t)として、前記GPS受信機によって得た現在の時刻tにおける測位結果XG(t)を出力する処理が第一の測位結果情報生成処理部102によって行われる(ステップ1003)。
【0042】
本発明の移動体の連続的測位システム1は、無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する第二の判定処理部103を備えている。
【0043】
そこで、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果、又は、現在及び直前の一つの時刻t−1における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する処理(ステップ1004)が当該第二の判定処理部103によって行われる。
【0044】
この第二の判定処理部103の判定結果については、測位の時刻、測位結果、判定の結果(予め定めてある範囲内にある、あるいはない)が関連付けられて記憶部に記憶される。
【0045】
本発明の移動体の連続的測位システム1の記憶部には、前記の第二の判定処理部103によって、無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する際に参照する予め定められた範囲、例えば、無線LANの有効範囲のx座標の下限:LBX1、x座標の上限:LBX2、y座標の下限:LBY1、y座標の上限:LBY2に関するデータが格納されている。
【0046】
前記の第二の判定処理部103によって行われる、無線LAN測位装置によって得た現在の時刻における移動体の測位結果が予め定めてある範囲内にあるかどうかを判定する処理(ステップ1004)は、例えば、無線LAN測位装置によって得た現在の時刻tにおける移動体の測位結果をXL(t)=(xL(t),yL(t))(UTM座標系での2次元ベクトル)とし、以下の(数8)の条件が満たされるかどうかによって判定される。
【数8】
【0047】
この(数8)が満たされている場合には、無線LAN測位装置によって得た現在の時刻における移動体の測位結果が予め定めてある範囲内にあるということになる。
【0048】
また、前記の第二の判定処理部103によって行われる、無線LAN測位装置によって得た現在及び直前の一つの時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する処理(ステップ1004)は、無線LAN測位装置によって得た現在の時刻tにおける移動体の測位結果については、前記の(数8)の条件が満たされるかどうかによって判定され、無線LAN測位装置によって得た直前の一つの時刻における測位結果については、無線LAN測位装置によって得た直前の一つの時刻t−1における移動体の測位結果をXL(t−1)=(xL(t−1),yL(t−1))(UTM座標系での2次元ベクトル)とし、以下の(数9)の条件が満たされるかどうかによって判定される。
【数9】
【0049】
(数8)及びこの(数9)が満たされている場合には、無線LAN測位装置によって得た現在及び直前の一つの時刻における移動体の測位結果が予め定めてある範囲内にあるということになる。
【0050】
更に、前記の第二の判定処理部103によって行われる、無線LAN測位装置によって得た現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する処理(ステップ1004)は、無線LAN測位装置によって得た現在の時刻tにおける移動体の測位結果については、前記の(数8)の条件が満たされるかどうかによって判定され、無線LAN測位装置によって得た直前の複数の時刻における測位結果については、複数として具体的に直前のn個(nは2以上の整数)の時刻とすると、無線LAN測位装置によって得た直前の複数の時刻t−m(m=1、2、・・・n)における移動体の測位結果をXL(t−m)=(xL(t−m),yL(t−m))(UTM座標系での2次元ベクトル)とし、1からnまでの全ての整数mについて以下の(数10)の条件が満たされるかどうかによって判定される。
【数10】
【0051】
(数8)及び1からnまでの全ての整数mについてこの(数10)が満たされていれば、無線LAN測位装置によって得た現在及び直前の複数の(この例ではn個の)時刻における測位結果は予め定めてある範囲内にあるということになる。
【0052】
なお、「現在の時刻における測位結果」、「現在及び直前の一つの時刻における測位結果」、「現在及び直前の複数の時刻における測位結果」のいずれについて、予め定めてある範囲内にあるかどうかを判定することにするかは、あらかじめ定めておき、このあらかじめ定めてあるところのコンピュータプログラムの指示により、「現在の時刻における測位結果」、「現在及び直前の一つの時刻における測位結果」、「現在及び直前の複数の時刻における測位結果」のいずれかについて、予め定めてある範囲内にあるかどうかを判定する処理が行われる。
【0053】
本発明の移動体の連続的測位システム1は、前記第二の判定処理部103が行う判定処理(ステップ1004)の結果によって得られた、無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数を、あらかじめ定めてある数(A)と比較する第三の判定処理部104を備えている。
【0054】
そこで、前記第二の判定処理部103が行う判定処理(ステップ1004)の結果によって得られた、無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数を、あらかじめ定めてある数(A)と比較する処理(ステップ1005)が当該第三の判定処理部104によって行われる。
【0055】
この第三の判定処理部104の判定結果は、記憶部に記憶される。
【0056】
この第三の判定処理部104によって行われる、前記第二の判定処理部103が行う判定処理(ステップ1004)の結果によって得られた無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数を、あらかじめ定めてある数(A)と比較する処理は、たとえば、前記第二の判定処理部103が行う判定処理(ステップ1004)が、無線LAN測位装置によって得た移動体の現在の時刻における測位結果について、それが予め定めてある範囲内にあるかどうかを判定する処理である場合には、あらかじめ定めてある数(A)を1、前記第二の判定処理部103が行う判定処理(ステップ1004)が、無線LAN測位装置によって得た移動体の現在及び直前の一つの時刻における測位結果について、それが予め定めてある範囲内にあるかどうかを判定する処理である場合には、あらかじめ定めてある数(A)を2、前記第二の判定処理部103が行う判定処理(ステップ1004)が、無線LAN測位装置によって得た移動体の現在及び直前の複数(その数を2以上の整数nとする)の時刻における測位結果について、それが予め定めてある範囲内にあるかどうかを判定する処理である場合には、あらかじめ定めてある数(A)をnとして、行うこともできる。この場合は、無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の全てが予め定めてある範囲内にあるかどうかを判定することになる。
【0057】
本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、前記の第二の判定処理部103の判定結果、記憶部に記憶されている、測位の時刻、測位結果、判定の結果(予め定めてある範囲内にある、あるいはない)と、前記第三の判定処理部104によって行われる、前記第二の判定処理部103が行う判定処理(ステップ1004)の結果によって得られた無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数を、あらかじめ定めてある数(A)と比較する処理の結果を参照して、予め定めてある範囲内となった数があらかじめ定められた数(A)以上であると認められた無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する無線LAN測位結果平均値算出手段105を備えている。
【0058】
なお、ここで、(数8)、(数9)あるいは(数10)を満たしている時点の測位結果のみを使用して、中間値又は平均値を算出するように、無線LAN測位結果平均値算出手段105を構成することも可能である。
【0059】
また、無線LAN測位結果平均値算出手段105で算出された中間値又は平均値を、現在における移動体の測位結果として移動体の測位結果情報を生成する第二の測位結果情報生成処理部106を備えている。
【0060】
この無線LAN測位結果平均値算出手段105、第二の測位結果情報生成処理部106によって、GPS受信機によって得た移動体の現在及び直前の一又は複数の時刻における測位結果のいずれかのばらつきが予め定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数(A)以上である場合に、予め定めてある範囲内となった数があらかじめ定められた数(A)以上であると認められた無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を、現在における移動体の測位結果として移動体の測位結果情報を生成するステップ(ステップ1006)が行われる。
【0061】
例えば、前記第二の判定処理部103が行う判定処理(ステップ1004)が無線LAN測位装置によって得た移動体の現在の時刻における測位結果XL(t)、1秒前の測位結果X(t−1)、2秒前の測位結果X(t−2)について行われ、前記の(数8)、m=1とした(数10)、m=2とした(数10)の中で成立しているものが(数8)とm=2とした(数10)のみである、すなわちXL(t)とX(t−2)との2つのみがあらかじめ定めた範囲内であったとし、前記のあらかじめ定められた数(A)が2であるとすれば、これは、第三の判定処理部104によって行われる、前記第二の判定処理部103が行う判定処理(ステップ1004)の結果によって得られた無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数が2であり、あらかじめ定められた数(A)以上であるため、無線LAN測位結果平均値算出手段105が(数8)、(数9)あるいは(数10)を満たしている時点の測位結果のみを使用して中間値又は平均値を算出するように構成されている場合には、前記の(数8)とm=2とした(数10)とが成立して測位結果があらかじめ定めてある範囲内であると認められたXL(t)とXL(t−2)とを平均して{XL(t)+XL(t−2)}/2が、あるいはXL(t)とXL(t−2)中間値{XL(t)+XL(t−2)}/2が、現在における移動体の測位結果情報として生成される。
【0062】
また、前記の(数8)、m=1とした(数10)、m=2とした(数10)の全てが成立している場合、すなわちXL(t)と、XL(t−1)と、XL(t−2)との3つがあらかじめ定められた範囲内であったとし、前記のあらかじめ定められた数(A)が2であるとれば、これは、第三の判定処理部104によって行われる、前記第二の判定処理部103が行う判定処理(ステップ1004)の結果によって得られた無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数が3であり、あらかじめ定められた数(A)以上であるため、前記の(数8)と、m=1とした(数10)と、m=2とした(数10)とが成立して測位結果があらかじめ定めてある範囲内であると認められたXL(t)と、XL(t−1)と、XL(t−2)とを平均して{XL(t)+XL(t−1)+XL(t−2)}/3が、あるいは、これらの中間値として次の値が、現在における移動体の測位結果情報として生成される。
【0063】
なお、前記において、XL(t)=(xL(t),yL(t))、XL(t−1)=(xL(t−1),yL(t−1))、XL(t−2)=(xL(t−2),yL(t−2))の中間値は、これらのベクトルのx成分の中間値xmとy成分の中間値ymを成分とするベクトル(xm,ym)である。x成分の中間値xmは、xL(t)、xL(t−1)、xL(t−2)の最大値でも最小値でもない値であり、y成分の中間値ymは、yL(t)、yL(t−1)、yL(t−2)の最大値でも最小値でもない値である。
【0064】
本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、第三の測位結果情報生成処理部107を備えている。
【0065】
GPS受信機によって得た移動体の現在及び直前の一又は複数の時刻における測位結果のいずれかのばらつきが予め定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数より少ない場合には、この第三の測位結果情報生成処理部107により、直前における移動体の測位結果XR(t−1)を現在における移動体の測位結果XR(t)として移動体の測位結果情報を生成する処理が、この第三の測位結果情報生成処理部107によって行われる(ステップ1007)。
【0066】
なお、以上に説明したように、本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1と、これによる、無線LAN測位とGPS測位とを併用した移動体の連続的測位方法によれば、第一の判定処理部101によって行われる、GPS受信機によって得た現在及び直前の一又は複数の時刻における移動体の測位結果のばらつきを判定する処理(ステップ1002)の結果、前記の(数7)が成立せず、GPS受信機によって得た移動体の現在及び直前の一又は複数の時刻における測位結果のいずれかのばらつきが予め定めてある範囲外である場合であって、前記第二の判定処理部103が行う判定処理(ステップ1004)が、無線LAN測位装置によって得た移動体の現在の時刻における測位結果について、それが予め定めてある範囲内にあるかどうかを判定する処理であって、第三の判定処理部104によって行われる、前記第二の判定処理部103が行う判定処理(ステップ1004)の結果によって得られた無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数(A)が1であるときには、前記第二の判定処理部103が行う判定処理(ステップ1004)によって、無線LAN測位装置によって得た移動体の現在の時刻における測位結果が予め定めてある範囲内にあると認められれば、無線LAN測位結果平均値算出手段105によって、無線LAN測位装置によって得た移動体の現在の時刻における測位結果の中間値又は平均値が算出され、これは、すなわち、無線LAN測位装置によって得た移動体の現在の時刻における測位結果が、現在における移動体の測位結果として移動体の測位結果情報が生成されるものになる。
【実施例2】
【0067】
実施例2の本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、請求項2に係る発明に対応するものである。
【0068】
図1、図2を用いて説明した本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム及び、これによる連続的測位方法と共通する部分には共通する符号を用いて、その説明を省略する。
【0069】
実施例2の本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、図1を用いて説明した実施例1のシステムにおける第三の測位結果情報生成処理部107に替えて、GPS受信機によって得た移動体の現在及び直前の一又は複数の時刻における測位結果のいずれかのばらつきが予め定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数より少ない場合、図3図示のように、直前の時刻t−1における移動体の測位結果の値XR(t−1)に、高感度GPS受信機によって得た当該直前の時点t−1から現在tまでの移動体の移動量を加算する処理を行う第一の加算処理部108と、当該加算処理の結果の値を、現在の時刻tにおける移動体の測位結果として出力する処理を行う第四の測位結果情報生成処理部109とを使用するものである。
【0070】
この実施例2の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1によれば、図4図示のように、GPS受信機によって得た移動体の現在及び直前の一又は複数の時刻における測位結果のいずれかのばらつきが予め定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数より少ない場合、第一の加算処理部108によって、直前の時刻t−1における移動体の測位結果の値XR(t−1)に、高感度GPS受信機によって得た当該直前の時点t−1から現在tまでの移動体の移動量を加算する処理が行われる(ステップ4007)(図4)。そして、第四の測位結果情報生成処理部109により、前記の加算処理の結果の値が、現在の時刻tにおける移動体の測位結果XR(t)(現在の移動体の位置)として出力される(ステップ4008)((図4)。
【0071】
ここで、第一の加算処理部108が行う、高感度GPS受信機によって得た当該直前の時点t−1から現在tまでの移動体の移動量を加算する処理は、例えば、次の(数11)のようにして行われる。
【数11】
【実施例3】
【0072】
この実施例で説明する本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、請求項3に係る発明に対応するものである。
【0073】
図1〜図4を用いて説明した本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム及び、これによる連続的測位方法と共通する部分には共通する符号を用いて、その説明を省略する。
【0074】
図3図示の本発明の移動体の連続的測位システム1は、外部と有線又は無線での情報交信を行うインターフェース部からなる情報取得部で取得した、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果とを比較する第一の比較処理部501を備えている(図5)。
【0075】
以下でも、実施例1と同様に、高感度GPS受信機以外のGPS受信機、高感度GPS受信機、無線LAN測位装置については1秒ごとにデータが得られる場合について説明する。また、無線LAN測位の有効範囲は座標軸に平行な矩形とする一例を示す。
【0076】
本発明の移動体の連続的測位システム1が、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果とを情報取得部で取得する(ステップ6001)(図6)。
【0077】
高感度GPS受信機によって得た現在の時刻における移動体の測位結果、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果を情報取得部で取得すると、それぞれの測位結果は、高感度GPS受信機によって得た測位結果であるのか、高感度GPS受信機以外のGPS受信機によって得た測位結果であるのかを認識する情報とともに、測位計測時刻と関連付けられて、コンピュータからなる本発明の移動体の連続的測位システム1の記憶部に記憶されて蓄積される。ここで、記憶部に記憶される高感度GPS受信機によって得た測位結果、高感度GPS受信機以外のGPS受信機によって得た測位結果の件数をあらかじめ定めてある件数にすることができる。本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システムが携帯電話等の資源の限られた機器に組み込まれる場合には、このように蓄積する件数を所定の数にすることが重要になる。
【0078】
こうして蓄積された過去の測位結果は、必要に応じて記憶部から取り出されて利用される。例えば、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果とを比較する処理に利用される。
【0079】
この実施例3でも、実施例1で説明したのと同じく、本発明の移動体の連続的測位システム1が、無線LAN測位装置によって得た移動体の現在の時刻における移動体の測位結果を情報取得部で取得すると、その測位結果は、測位計測時刻と関連付けられて、コンピュータからなる本発明の移動体の連続的測位システム1の記憶部に記憶されて蓄積される。ここでも、測位計測時刻と関連付けられて記憶部に記憶される無線LAN測位装置によって得た移動体の現在の時刻における移動体の測位結果の件数をあらかじめ定められた件数にすることができる。
【0080】
こうして蓄積された過去の測位結果は、必要に応じて記憶部から取り出されて利用される。例えば、無線LAN測位装置によって得た移動体の現在の測位結果、又は現在及び直前の一つの時刻における移動体の測位結果、もしくは現在及び直前の複数の時刻における移動体の測位結果の中間値又は平均値を求める処理に利用される。
【0081】
ここでは、現在の時刻をt、高感度GPS受信機によって得た現在の時刻における移動体の測位結果をXH(t)(座標はUTM座標系)、高感度GPS受信機以外のGPS受信機によって得た現在の時刻tにおける移動体の測位結果をXG(t)と表示する。
【0082】
本発明の移動体の連続的測位システム1の記憶部には、前記の第一の比較処理部501によって、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果とを比較する際に参照するデータが格納されている。このデータは、例えば、両者の差が制限(LC)の範囲内であるかどうかを判定するために利用される。
【0083】
そこで、例えば、前記の第一の比較処理部501によって行われる、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果とを比較する処理(ステップ6002)は、以下の(数12)の条件が満たされるか否かを判定する処理として行われる。
【数12】
【0084】
本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、第五の測位結果情報生成処理部502を備えている。
【0085】
前記の第一の比較処理部501によって行われる、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果とを比較する処理(ステップ6002)の結果、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果との差があらかじめ定めている範囲内である、すなわち、前記の(数12)が成立する場合には、当該第五の測位結果情報生成処理部502によって、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果XG(t)を現在における移動体の測位結果XR(t)として移動体の測位結果情報を生成する処理が行われる(ステップ6003)。
【0086】
この実施例3においても、実施例1と同じく、本発明の移動体の連続的測位システム1は、無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する第二の判定処理部103を備えており、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果、又は、現在及び直前の一つの時刻t−1における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する処理(ステップ6004)が当該第二の判定処理部103によって行われる。
【0087】
この第二の判定処理部103の判定結果については、測位の時刻、測位結果、判定の結果(予め定めてある範囲内にある、あるいはない)が関連付けられて記憶部に記憶される。
【0088】
この第二の判定処理部103が行う処理動作は、実施例1で説明したものと同様であるので、説明を省略する。
【0089】
また、この実施例3においても、実施例1と同じく、本発明の移動体の連続的測位システム1は、前記第二の判定処理部103が行う判定処理(ステップ6004)の結果によって得られた、無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数を、あらかじめ定めてある数(A)と比較する第三の判定処理部104を備えていて、前記第二の判定処理部103が行う判定処理(ステップ6004)の結果によって得られた、無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数を、あらかじめ定めてある数(A)と比較する処理(ステップ6005)が当該第三の判定処理部104によって行われる。この第三の判定処理部104の判定結果は、記憶部に記憶される。
【0090】
この第三の判定処理部104が行う処理動作も、実施例1で説明したものと同様であるので、説明を省略する。
【0091】
また、この実施例3においても、実施例1と同じく、本発明の移動体の連続的測位システム1は、実施例1で説明した無線LAN測位結果平均値算出手段105を備えている。この無線LAN測位結果平均値算出手段105が、前述した(数8)、(数9)あるいは(数10)を満たしている時点の測位結果のみを使用して、中間値又は平均値を算出するように構成可能であることも実施例1と同様である。
【0092】
また、無線LAN測位結果平均値算出手段105で算出された中間値又は平均値を、現在における移動体の測位結果として移動体の測位結果情報を生成する第二の測位結果情報生成処理部106を備えている。
【0093】
この無線LAN測位結果平均値算出手段105、第二の測位結果情報生成処理部106によって、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果との差が予め定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数(A)以上である場合に、予め定めてある範囲内となった数があらかじめ定められた数(A)以上であると認められた無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を、現在における移動体の測位結果として移動体の測位結果情報を生成するステップ(ステップ6006)が行われる。
【0094】
この処理動作も、実施例1で説明したものと基本的に同様である。
【0095】
この実施例3の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1も、実施例1と同様に、第三の測位結果情報生成処理部107を備えている。
【0096】
高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果との差が予め定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数より少ない場合には、この第三の測位結果情報生成処理部107により、直前における移動体の測位結果XR(t−1)を現在における移動体の測位結果XR(t)として移動体の測位結果情報を生成する処理が、この第三の測位結果情報生成処理部107によって行われる(ステップ6007)。
【実施例4】
【0097】
図7、図8図示に係る実施例4の本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、請求項4に係る発明に対応するもので、実施例3のシステムに対して、実施例1のシステムに対する実施例2のシステムの関係にある。
【0098】
図1〜図6を用いて説明した本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム及び、これによる連続的測位方法と共通する部分には共通する符号を用いて、その説明を省略する。
【0099】
図5を用いて説明した実施例3のシステムにおける第三の測位結果情報生成処理部107を使用することに替えて、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果との差が予め定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数より少ない場合、図7図示のように、直前の時刻t−1における移動体の測位結果の値XR(t−1)に、高感度GPS受信機によって得た当該直前の時点t−1から現在tまでの移動体の移動量を加算する処理を行う第一の加算処理部108と、当該加算処理の結果の値を、現在の時刻tにおける移動体の測位結果として出力する処理を行う第四の測位結果情報生成処理部109とを使用するものである。
【0100】
この実施例4のシステムの処理動作は、前述した実施例2のシステムの処理動作と同様であるので、説明を省略する。
【実施例5】
【0101】
図9、図10を参照して本発明の他の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1を説明する。この連続的測位システム1は、請求項5に係る発明に対応するものである。図1〜図6を用いて説明した本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム及び、これによる連続的測位方法と共通する部分には共通する符号を用いて、その説明を省略する。
【0102】
ここでは、DOPとして、平面位置の精度の指標であるHDOPを使用し、無線LAN測位の有効範囲は座標軸に平行な矩形とする例を示す。
【0103】
この本発明の移動体の連続的測位システム1は、外部と有線又は無線での情報交信を行うインターフェース部からなる情報取得部で取得した、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めてある範囲にあるかどうかを判定する判定処理部901を備えている。
【0104】
以下でも、実施例1と同様に、GPS受信機、無線LAN測位装置については1秒ごとにデータが得られる場合について説明する。また、無線LAN測位の有効範囲は座標軸に平行な矩形とする一例を示す。
【0105】
本発明の移動体の連続的測位システム1が、GPS受信機によって得た現在の時刻における移動体の測位結果を情報取得部で取得する(ステップ10001)。
【0106】
GPS受信機によって得た現在の時刻における移動体の測位結果は、同時に得られるHDOPの値とともに、測位計測時刻と関連付けられて、コンピュータからなる本発明の移動体の連続的測位システム1の記憶部に記憶されて蓄積される。ここで、記憶部に記憶されるGPS受信機によって得た測位結果の件数はあらかじめ定められている所定の数にすることができる。
【0107】
こうして蓄積された過去の測位結果は、必要に応じて記憶部から取り出されて利用される。例えば、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めてある範囲にあるかどうかを判定する処理に利用される。
【0108】
この実施例5でも、実施例1で説明したのと同じく、本発明の移動体の連続的測位システム1が、無線LAN測位装置によって得た移動体の現在の時刻における移動体の測位結果を情報取得部で取得すると、その測位結果は、測位計測時刻と関連付けられて、コンピュータからなる本発明の移動体の連続的測位システム1の記憶部に記憶されて蓄積される。ここでも、測位計測時刻と関連付けられて記憶部に記憶される無線LAN測位装置によって得た移動体の現在の時刻における移動体の測位結果の件数をあらかじめ定められた件数にすることができる。
【0109】
こうして蓄積された過去の測位結果は、必要に応じて記憶部から取り出されて利用される。例えば、無線LAN測位装置によって得た移動体の現在の測位結果、又は現在及び直前の一つの時刻における移動体の測位結果、もしくは現在及び直前の複数の時刻における移動体の測位結果の中間値又は平均値を求める処理に利用される。
【0110】
ここでは、現在の時刻をt、GPS受信機によって得た現在の時刻における移動体の測位結果をXG(t)(座標はUTM座標系)、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値をD(t)と表示する。
【0111】
本発明の移動体の連続的測位システム1の記憶部には、前記の判定処理部901によって、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めてある範囲にあるかどうかを判定する際に参照するデータが格納されている。このデータは、例えば、HDOPの値が制限(LD)の範囲内であるかどうかを判定するために使用される。
【0112】
そこで、例えば、判定処理部901によって、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めてある範囲にあるかどうかを判定する処理(ステップ10002)は、以下の(数13)の条件が満たされるか否かを判定する処理として行われる。
【数13】
【0113】
なお、GPS受信機で得られた測位モードにより場合わけを行い、測位モードごとにLDの値を変える実施形態も可能である。
【0114】
本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、第六の測位結果情報生成処理部902を備えている。
【0115】
前記の判定処理部901によって、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めてある範囲にあるかどうかを判定する処理(ステップ10002)の結果、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めている範囲内である、すなわち、前記の(数13)が成立する場合には、当該第六の測位結果情報生成処理部902によって、GPS受信機によって得た現在の時刻における移動体の測位結果XG(t)を現在における移動体の測位結果XR(t)として移動体の測位結果情報を生成する処理が行われる(ステップ10003)。
【0116】
この実施例5においても、実施例1と同じく、本発明の移動体の連続的測位システム1は、無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する第二の判定処理部103を備えており、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果、又は、現在及び直前の一つの時刻t−1における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する処理(ステップ10004)が当該第二の判定処理部103によって行われる。
【0117】
この第二の判定処理部103の判定結果については、測位の時刻、測位結果、判定の結果(予め定めてある範囲内にある、あるいはない)が関連付けられて記憶部に記憶される。
【0118】
この第二の判定処理部103が行う処理動作は、実施例1で説明したものと同様であるので、説明を省略する。
【0119】
また、この実施例5においても、実施例1と同じく、本発明の移動体の連続的測位システム1は、前記第二の判定処理部103が行う判定処理(ステップ10004)の結果によって得られた、無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数を、あらかじめ定めてある数(A)と比較する第三の判定処理部104を備えていて、前記第二の判定処理部103が行う判定処理(ステップ10004)の結果によって得られた、無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数を、あらかじめ定めてある数(A)と比較する処理(ステップ10005)が当該第三の判定処理部104によって行われる。この第三の判定処理部104の判定結果は、記憶部に記憶される。
【0120】
この第三の判定処理部104が行う処理動作も、実施例1で説明したものと同様であるので、説明を省略する。
【0121】
また、この実施例5においても、実施例1と同じく、本発明の移動体の連続的測位システム1は、実施例1で説明した無線LAN測位結果平均値算出手段105を備えている。この無線LAN測位結果平均値算出手段105が、前述した(数8)、(数9)あるいは(数10)を満たしている時点の測位結果のみを使用して、中間値又は平均値を算出するように構成可能であることも実施例1と同様である。
【0122】
また、無線LAN測位結果平均値算出手段105で算出された中間値又は平均値を、現在における移動体の測位結果として移動体の測位結果情報を生成する第二の測位結果情報生成処理部106を備えている。
【0123】
この無線LAN測位結果平均値算出手段105、第二の測位結果情報生成処理部106によって、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数(A)以上である場合に、予め定めてある範囲内となった数があらかじめ定められた数(A)以上であると認められた無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を、現在における移動体の測位結果として移動体の測位結果情報を生成するステップ(ステップ10006)が行われる。
【0124】
この処理動作も、実施例1で説明したものと基本的に同様である。
【0125】
この実施例5の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1も、実施例1と同様に、第三の測位結果情報生成処理部107を備えている。
【0126】
GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めてある範囲外である場合であって、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数より少ない場合には、この第三の測位結果情報生成処理部107により、直前における移動体の測位結果XR(t−1)を現在における移動体の測位結果XR(t)として移動体の測位結果情報を生成する処理が、この第三の測位結果情報生成処理部107によって行われる(ステップ10007)。
【実施例6】
【0127】
図11、図12図示に係る実施例6の本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、請求項6に係る発明に対応するもので、実施例5のシステムに対して、実施例1のシステムに対する実施例2のシステムの関係にある。
【0128】
図1〜図10を用いて説明した本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム及び、これによる連続的測位方法と共通する部分には共通する符号を用いて、その説明を省略する。
【0129】
図9を用いて説明した実施例5のシステムにおける第三の測位結果情報生成処理部107を使用することに替えて、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数より少ない場合、図11図示のように、直前の時刻t−1における移動体の測位結果の値XR(t−1)に、高感度GPS受信機によって得た当該直前の時点t−1から現在tまでの移動体の移動量を加算する処理を行う第一の加算処理部108と、当該加算処理の結果の値を、現在の時刻tにおける移動体の測位結果として出力する処理を行う第四の測位結果情報生成処理部109とを使用するものである。
【0130】
この実施例6のシステムの処理動作は、前述した実施例2のシステムの処理動作と同様であるので、説明を省略する。
【実施例7】
【0131】
図13、図14を用いて、本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1を説明する。このシステムは請求項7記載の発明に対応している。
【0132】
図1〜図12を用いて説明した本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム及び、これによる連続的測位方法と共通する部分には共通する符号を用いて、その説明を省略する。
【0133】
ここでは、DOPとして、平面位置の精度の指標であるHDOPを使用し、無線LAN測位の有効範囲は座標軸に平行な矩形とする例を示す。
【0134】
この連続的測位システム1は、外部と有線又は無線での情報交信を行うインターフェース部からなる情報取得部で取得した、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する算出処理部1301を備えている。
【0135】
また、無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、無線LAN測位装置によって得た移動体の現在及び直前の一つの時刻における測位結果、若しくは、無線LAN測位装置によって得た移動体の現在及び直前の複数の時刻における測位結果を用いて、無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する算出処理部1302を備えている。
【0136】
ここで、無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出するにあたり、「無線LAN測位装置によって得た移動体の現在の時刻における測位結果」、「無線LAN測位装置によって得た移動体の現在及び直前の一つの時刻における測位結果」、「無線LAN測位装置によって得た移動体の現在及び直前の複数の時刻における測位結果」の中のいずれを用いるかは、あらかじめ定めておき、このあらかじめ定めているところのコンピュータプログラムの指示により、算出処理部1302により、「無線LAN測位装置によって得た移動体の現在の時刻における測位結果」、「無線LAN測位装置によって得た移動体の現在及び直前の一つの時刻における測位結果」、「無線LAN測位装置によって得た移動体の現在及び直前の複数の時刻における測位結果」の中のいずれかを用いて、無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度が算出される。
【0137】
更に、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果、又は、現在及び直前の一つの時刻t−1における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する算出処理部1303を備えている。
【0138】
更に、前記算出処理部1301によって算出された、GPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、前記算出処理部1302によって算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出処理部1303によって算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとして、GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値とを平均する算出処理部1304を備えている。
【0139】
以下では、GPS受信機、無線LAN測位装置については1秒ごとにデータが得られる場合について説明する。
【0140】
この実施例及び、以下の実施例では、無線LAN測位の有効範囲は座標軸に平行な矩形とする一例を示す。
【0141】
ただし、これ以外の形態でも本発明は実施可能である。
【0142】
本発明の移動体の連続的測位システム1がGPS受信機によって得た現在の時刻における移動体の測位結果を情報取得部で取得する(ステップ14001)。
【0143】
こうして取得したGPS受信機によって得た現在における移動体の測位結果を記憶部に記憶しておくことに関しては実施例1と同様である。
【0144】
また、このシステム1が、無線LAN測位装置によって得た移動体の現在の時刻における移動体の測位結果を情報取得部で取得して、それが記憶部に記憶されていくことに関しても実施例1と同様である。
【0145】
ここでは、現在の時刻をt、GPS受信機によって得た現在の時刻における移動体の測位結果をXG(t)(座標はUTM座標系)と表示する。
【0146】
GPS受信機よって得た現在の時刻における移動体の測位結果におけるHDOP値をD(t)とする。
【0147】
現在の時刻をtとし、算出処理部1301は、D(t)を用いて、GPS受信機よって得た現在の時刻における移動体の測位結果の精度EG(t)を、以下の方法により計算する(ステップ14002)。
【0148】
すなわち、GPS受信機よって得た現在の時刻における移動体の測位が、3次元測位モードでかつDGPSモードで行われた場合は、 EG(t)=EG1×D(t)、3次元測位モードでかつ単独測位モードで行われた場合は、EG(t)=EG2×D(t)、2次元測位モードでかつDGPSモードで行われた場合は、EG(t)=EG3×D(t)、2次元測位モードでかつ単独測位モードで行われた場合は、EG(t)=EG4×D(t)という計算式によって移動体の測位結果の精度EG(t)を計算により求める。例えば、EG1=1.0、EG2=1.5、EG3=2.0、EG4=3.0とする。もちろん、このような場合わけを行わず、全ての場合に同じEG(t)の計算方式を使用することもできる。
【0149】
一方、算出処理部1302によって行われる、無線LAN測位装置によって得た移動体の現在の時刻における測位結果の精度算出(ステップ14003)は、次のように行われる。
【0150】
実施例1における、第二の判定処理部103が行う判定処理(ステップ1004)の結果によって得られた、無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数をk個、第二の判定処理部103が行う判定処理(ステップ1004)において行われた判定数(k個の母数;たとえば、現在と直前の2時点の判定なら3)をlとし、下記(数14)により、現在の無線LAN測位結果の精度EL(t)を求める。
【数14】
【0151】
前記の(数14)におけるあらかじめ定められている乗数EL1、EL2は、前記の算出処理部1302による処理動作のために、本発明のシステム1の記憶部に格納しておくことができる。
【0152】
算出処理部1303によって行われる、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果、又は、現在及び直前の一つの時刻t−1における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する処理(ステップ14004)は、次のように行われる。
【0153】
あらかじめ定められているところにより、コンピュータプログラムの指示が、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果の中間値又は平均値を算出するものであるときには、無線LAN測位装置によって得た移動体の現在の時刻における測位結果XL(t)が、中間値又は平均値として算出される。
【0154】
あるいは、あらかじめ定められているところにより、コンピュータプログラムの指示が、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果XL(t)及び直前の一つの時刻t−1における測位結果XL(t−1)の中間値又は平均値を算出するものであるときには、{XL(t)+XL(t−1)}/2が、中間値又は平均値として算出される。
【0155】
もしくは、あらかじめ定められているところにより、コンピュータプログラムの指示が、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果XL(t)及び直前の複数の時刻(例えば、時刻t−1と、時刻t−2)における測位結果XL(t−1)、XL(t−2)の中間値又は平均値を算出するものであるときには、平均値として{XL(t)+XL(t−1)+XL(t−2)}/3が、あるいは中間値として以下に示す値が算出される。
【0156】
なお、前記において、XL(t)=(xL(t),yL(t))、XL(t−1)=(xL(t−1),yL(t−1))、XL(t−2)=(xL(t−2),yL(t−2))の中間値は、これらのベクトルのx成分の中間値xmとy成分の中間値ymを成分とするベクトル(xm,ym)である。x成分の中間値xmは、xL(t)、xL(t−1)、xL(t−2)の最大値でも最小値でもない値であり、y成分の中間値ymは、yL(t)、yL(t−1)、yL(t−2)の最大値でも最小値でもない値である。
【0157】
次に、算出処理部1304によって行われる、算出処理部1301によって算出された、GPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、算出処理部1302によって算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、算出処理部1303によって算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとして、GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値とを平均する処理(ステップ14005)は、具体的には、以下の(数15)により行われる。
【数15】
【0158】
こうして算出処理部1304によって行われた計算処理の結果が、現在における移動体の測位結果として出力(ステップ14006)される。
【実施例8】
【0159】
図15、図16を用いて、本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1を説明する。このシステムは請求項8記載の発明に対応している。
【0160】
図1〜図14を用いて説明した本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム及び、これによる連続的測位方法と共通する部分には共通する符号を用いて、その説明を省略する。
【0161】
ここでは、DOPとして、平面位置の精度の指標であるHDOPを使用し、無線LAN測位の有効範囲は座標軸に平行な矩形とする例を示す。
【0162】
この連続的測位システム1は、実施例7のシステムと同じく、外部と有線又は無線での情報交信を行うインターフェース部からなる情報取得部で取得した、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する算出処理部1301と、無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、無線LAN測位装置によって得た移動体の現在及び直前の一つの時刻における測位結果、若しくは、無線LAN測位装置によって得た移動体の現在及び直前の複数の時刻における測位結果を用いて、無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する算出処理部1302とを備えている。
【0163】
また、直前の移動体の測位結果を現在の測位結果として利用する際の精度を、直前の移動体の測位結果の精度と、予め定められている移動体の移動速度に基づいて算出する算出処理部1501を備えている。
【0164】
更に、実施例7のシステムと同じく、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果、又は、現在及び直前の一つの時刻t−1における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値は平均値を算出する算出処理部1303を備えている。
【0165】
更に、前記算出処理部1301によって算出された、GPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、前記算出処理部1302によって算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出処理部1303によって算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとし、直前の移動体の測位結果を現在の測位結果として利用する際の精度の2乗の逆数を、直前の移動体の測位結果の重みとして、GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値と、直前の移動体の測位結果とを平均する算出処理部1502を備えている。
【0166】
更に、次の時点の測位結果情報を生成するために、(数16)により、現在の測位結果の精度を算出する算出処理部1503を備えている。
【数16】
【0167】
本発明の移動体の連続的測位システム1がGPS受信機によって得た現在の時刻における移動体の測位結果を情報取得部で取得する(ステップ16001)。
【0168】
こうして取得したGPS受信機によって得た現在における移動体の測位結果を記憶部に記憶しておくことに関しては実施例1と同様である。
【0169】
また、このシステム1が、無線LAN測位装置によって得た移動体の現在の時刻における移動体の測位結果を情報取得部で取得して、それが記憶部に記憶されていくことに関しても実施例1と同様である。
【0170】
ここでは、現在の時刻をt、GPS受信機によって得た現在の時刻における移動体の測位結果をXG(t)(座標はUTM座標系)と表示する。
【0171】
GPS受信機よって得た現在の時刻における移動体の測位結果におけるHDOP値をD(t)とする。
【0172】
現在の時刻をtとし、算出処理部1301は、D(t)を用いて、実施例7で説明したように、GPS受信機よって得た現在の時刻における移動体の測位結果の精度EG(t)を計算する(ステップ16002)。
【0173】
算出処理部1302によって行われる、無線LAN測位装置によって得た移動体の現在の時刻における測位結果の精度算出(ステップ16003)も、実施例7で説明したように行われる。
【0174】
算出処理部1501によって行われる、直前の移動体の測位結果XR(t−1)を現在の測位結果として利用する際の精度ES(t)を、直前の移動体の測位結果XR(t−1)の精度ER(t−1)と、予め定められている移動体の移動速度vに基づいて算出する処理(ステップ16004)は、ES(t)=ER(t−1)+vによって行われる。
【0175】
算出処理部1303が、無線LAN測位結果の中間値は平均値を算出する処理(ステップ16005)は、実施例7で説明したように行われる。
【0176】
次に、算出処理部1502によって行われる、算出処理部1301によって算出された、GPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、算出処理部1302によって算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、算出処理部1303によって算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとし、直前の移動体の測位結果を現在の測位結果として利用する際の精度ES(t)の2乗の逆数を、直前の移動体の測位結果の重みとして、GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値と、直前の移動体の測位結果とを平均する処理(ステップ16006)は、具体的には、以下の(数17)により行われる。
【数17】
【0177】
こうして算出処理部1502によって行われた計算処理の結果が、現在における移動体の測位結果として出力される(ステップ16007)。
【0178】
更に、算出処理部1503によって、前記の(数16)により、現在の測位結果の精度が算出され(ステップ16008)、これが、次の時点の測位結果情報を生成するために利用される。
【実施例9】
【0179】
図17、図18、図19に示すこの実施例のシステムは、請求項9に係る発明に対応している。
【0180】
図1〜図16を用いて説明した本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム及び、これによる連続的測位方法と共通する部分には共通する符号を用いて、その説明を省略する。
【0181】
図17、図18、図19に示すこの実施例のシステムは、実施例7、8のシステムにおいて、現在における移動体の測位結果として生成された移動体の測位結果情報における平均遅延時間を算出する算出処理部1701と、現在における移動体の測位結果として生成された移動体の測位結果情報に、高感度GPS受信機によって得た現在と当該平均遅延時間だけ前の時点における移動体の測位結果の差を加算する算出処理部1702と、を更に備えている。
【0182】
この実施例のシステムでは、GPS受信機として高感度GPS受信機以外のGPS受信機、例えばDGPS受信機が使用される例で説明する。
【0183】
ここで、算出処理部1701が行う現在における移動体の測位結果として生成された移動体の測位結果情報における平均遅延時間を算出する処理(ステップ18006)(図18)、(ステップ19007)(図19)は、具体的には、次の(数18)のように行われる。
【数18】
【0184】
また、算出処理部1702が行う現在における移動体の測位結果として生成された移動体の測位結果情報に、高感度GPS受信機によって得た現在と当該平均遅延時間だけ前の時点における移動体の測位結果の差を加算する処理(ステップ18007)(図18)、(ステップ19008)(図19)は、具体的には、次の(数19)のように行われる。
【数19】
【0185】
なお、ここでは、1秒ごとに高感度GPSの測位結果が得られるとして、平均遅延時間Δt(t)に最も近い整数Δt’(t)を求め、現在の時刻からΔt’(t)秒前の高感度GPS受信機の測位結果を用いた例を示したが、1秒ごとに得られる高感度GPSの測位結果を内挿し、時刻t−Δt(t)の高感度GPS受信機の測位結果を推定し、上記の(数19)におけるXH(t−Δt’(t))の代わりに使用することもできる。
【0186】
こうして算出処理部1702によって行われた計算処理の結果XR’(t)が、現在における移動体の測位結果として出力される(ステップ18008)(図18)、(ステップ19009)(図19)。
【0187】
以上、添付図面を参照して本発明の好ましい実施形態を説明したが、本発明はかかる実施形態に限定されるものではなく、特許請求の範囲の記載から把握される技術的範囲において種々の形態に変更可能である。
【図面の簡単な説明】
【0188】
【図1】無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図2】図1図示の連続測位システムを利用した本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図3】無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図4】図3図示の連続測位システムを利用した本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図5】無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図6】図5図示の連続測位システムを利用した本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図7】無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図8】図7図示の連続測位システムを利用した本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図9】無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図10】図9図示の連続測位システムを利用した本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図11】無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図12】図11図示の連続測位システムを利用した本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図13】請求項1記載の本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図14】図13図示の連続測位システムを利用した請求項1記載の本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図15】請求項2記載の本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図16】図15図示の連続測位システムを利用した請求項2記載の本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図17】請求項3記載の本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図18】図17図示の連続測位システムを利用した請求項3記載の本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図19】図17図示の連続測位システムを利用した請求項3記載の本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位方法の他の一例を説明するフロー図。
【符号の説明】
【0189】
1 無線LAN測位とGPS測位とを併用した移動体の連続的測位システム
101 第一の判定処理部
102 第一の測位結果情報生成処理部
103 第二の判定処理部
104 第三の判定処理部
105 無線LAN測位結果平均値算出手段
106 第二の測位結果情報生成処理部
107 第三の測位結果情報生成処理部
901 判定処理部
902 第六の測位結果情報生成処理部
108 第一の加算処理部
109 第四の測位結果情報生成処理部
1301 算出処理部
1302 算出処理部
1303 算出処理部
1304 算出処理部
1501 算出処理部
1502 算出処理部
1503 算出処理部
1701 算出処理部
1702 算出処理部
【技術分野】
【0001】
この発明は、移動体の測位技術に関し、特に、移動体が屋内外を移動している場合に、シームレスに移動体を測位できる移動体の連続的測位方法及び装置に関する。
【背景技術】
【0002】
従来から、主に屋外で有効な測位方法としては、GPS測位が一般的である。GPS(全地球測位システム)は衛星を使用した位置決定システムで、その測位方式には、大きく分けて、GPS受信機を1台だけ用いる単独測位方式と、2台以上用いる相対測位方式がある。相対測位方式にはDGPS(Differential GPS)方式と、干渉測位方式がある。DGPS方式は、2台の受信機を座標既知点と未知点に設置して座標既知点で測定誤差を求め、それによって未知点での測位誤差を改善する方式である。高感度GPSは、単独測位方式の一種で、屋外においては通常の単独測位方式と同程度の測位ができ、通常GPSが利用できない屋内においても測位誤差が増大するもののある程度測位が可能な方式である。DGPS方式は、高感度GPSと比べ、測位できない場合が多いが、精度は高い。干渉測位方式は、DGPSより更に測位できない場合が多いが、精度も更に高い。
【0003】
DOP(Dilution of precision,精度低下率)は、測位誤差を評価する指標であり、GPSの測位結果と同時に得られる。GPSの測位誤差は、擬似距離の計測誤差とDOPの積と見積もられる。DOPの値は常に正であり、値が大きいほど誤差が大きい。
【0004】
一方、主に屋内で有効な測位方法として、従来から、無線LAN測位がある。無線LAN測位は、座標既知点に存在している複数のアクセスポイントと移動体(端末、例えば、無線LAN機能を有するPDAなど)との間の距離を計算し、移動体の位置を求める。
【0005】
移動体の測位技術を歩行者ナビゲーション等に応用する場合、屋内外で連続して測位できるようにすることが重要になる。
【0006】
そこで、GPS測位と無線LAN測位とを適切に組み合わせることによって、屋内外を問わず、連続して(シームレスに)測位を行うことが提案されている。
【0007】
例えば、日本写真測量学会年次学術講演会(2004年6月17〜18日)発表論文集の25〜26頁には、無線LAN測位の結果とGPS測位の結果を組み合わせ、連続的な測位を実現するための方法として、無線LAN測位結果とGPS測位結果の融合アルゴリズムが提案されている。
【特許文献1】特開2002−14152
【非特許文献1】日本写真測量学会年次学術講演会(2004年6月17〜18日)発表論文集 25〜26頁
【発明の開示】
【発明が解決しようとする課題】
【0008】
前述した非特許文献1に記載されているアルゴリズムは、ある時点の融合結果の計算に、将来の無線LAN測位の結果及びGPS測位の結果も用いているため、リアルタイムで融合計算を行うことができないものであった。また、無線LAN測位の結果とGPS測位の結果の重み付き平均を採用しているが、重みの理論的根拠は、不明確であった。
【0009】
この発明は、屋内外を移動する移動体の測位をGPS測位と無線LAN測位とを併用して行うにあたって、リアルタイム処理を可能とし、屋内外で連続して測位できる無線LAN測位とGPS測位とを併用した移動体の連続的測位方法及び装置、並びに移動体の連続的測位プログラムを提案することを目的にしている。
【課題を解決するための手段】
【0010】
前記の目的を達成するため、本発明が提案する発明は以下の通りのものである。
【0011】
請求項1に係る発明
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出するステップと、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出するステップと、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出するステップと、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成するステップ
を備えた無線LAN測位とGPS測位とを併用した移動体の連続的測位方法。
【0012】
請求項2に係る発明
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出するステップと、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出するステップと、
直前の移動体の測位結果を現在の測位結果として利用する際の精度を、直前の移動体の測位結果の精度と、予め定められている移動体の移動速度に基づいて算出するステップと、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出するステップと、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとし、
直前の移動体の測位結果を現在の測位結果として利用する際の精度の2乗の逆数を、直前の移動体の測位結果の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値と、直前の移動体の測位結果とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成するステップと、
次の時点の測位結果情報を生成するために、(数4)により、現在の測位結果の精度を算出するステップと
を備えた無線LAN測位とGPS測位とを併用した移動体の連続的測位方法。
【数4】
【0013】
請求項3に係る発明
現在における移動体の測位結果として生成された移動体の測位結果情報における平均遅延時間を算出し、現在における移動体の測位結果として生成された移動体の測位結果情報に、屋外においては前記GPS受信機と同程度の測位を行うことができると共に、前記GPS受信機が利用できない屋内においても測位が可能な方式による高感度GPS受信機によって得た現在と当該平均遅延時間だけ前の時点における移動体の測位結果の差を加算し、これを現在における移動体の測位結果として移動体の測位結果情報を生成するステップを更に含むことを特徴とする請求項1又は2記載の無線LAN測位とGPS測位とを併用した移動体の連続的測位方法。
【0014】
以上の請求項1〜3に係る本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位方法は、パーソナルコンピュータなどの汎用コンピュータや、専用コンピュータのCPUなどからなる処理部が、本発明のコンピュータプログラムの指示の下に前述した本発明の方法における各ステップに対応する処理動作を実行することによって実現されている本発明の下記の無線LAN測位とGPS測位とを併用した移動体の連続的測位装置によって実施されるものである。
【0015】
請求項4に係る発明
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する第一の算出手段と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する第二の算出手段と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する第三の算出手段と、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成する第十三の移動体の測位結果情報生成手段
を備えた無線LAN測位とGPS測位とを併用した移動体の連続的測位装置。
【0016】
請求項5に係る発明
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する第十四の算出手段と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する第十五の算出手段と、
直前の移動体の測位結果を現在の測位結果として利用する際の精度を、直前の移動体の測位結果の精度と、予め定められている移動体の移動速度に基づいて算出する第六の算出手段と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する第七の算出手段と、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとし、
直前の移動体の測位結果を現在の測位結果として利用する際の精度の2乗の逆数を、直前の移動体の測位結果の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値と、直前の移動体の測位結果とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成する第十四の移動体の測位結果情報生成手段と、
次の時点の測位結果情報を生成するために、(数5)により、現在の測位結果の精度を算出する第八の算出手段と
を備えた無線LAN測位とGPS測位とを併用した移動体の連続的測位装置。
【数5】
【0017】
請求項6に係る発明
現在における移動体の測位結果として生成された移動体の測位結果情報における平均遅延時間を算出し、現在における移動体の測位結果として生成された移動体の測位結果情報に、屋外においては前記GPS受信機と同程度の測位を行うことができると共に、前記GPS受信機が利用できない屋内においても測位が可能な方式による高感度GPS受信機によって得た現在と当該平均遅延時間だけ前の時点における移動体の測位結果の差を加算し、これを現在における移動体の測位結果として移動体の測位結果情報を生成する第十五の移動体の測位結果情報生成手段を更に含むことを特徴とする請求項4又は5記載の無線LAN測位とGPS測位とを併用した移動体の連続的測位装置。
【0018】
パーソナルコンピュータなどの汎用コンピュータや、専用コンピュータなどからなる以上の請求項4〜6に係る本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位装置におけるCPUなどの処理部に、前述した本発明の方法における各ステップに対応する処理動作を実行させる本発明のコンピュータプログラムは、以下の通りのものである。
【0019】
請求項7に係る発明
コンピュータに、
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する第一の算出機能と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する第二の算出機能と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する第三の算出機能と、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成する第十三の移動体の測位結果情報生成機能と
を実現させる無線LAN測位とGPS測位とを併用した移動体の連続的測位プログラム。
【0020】
請求項8に係る発明
コンピュータに、
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する第四の算出機能と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する第五の算出機能と、
直前の移動体の測位結果を現在の測位結果として利用する際の精度を、直前の移動体の測位結果の精度と、予め定められている移動体の移動速度に基づいて算出する第六の算出機能と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する第七の算出機能と、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとし、
直前の移動体の測位結果を現在の測位結果として利用する際の精度の2乗の逆数を、直前の移動体の測位結果の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値と、直前の移動体の測位結果とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成する第十四の移動体の測位結果情報生成機能と、
次の時点の測位結果情報を生成するために、(数6)により、現在の測位結果の精度を算出する第八の算出機能と
を実現させる無線LAN測位とGPS測位とを併用した移動体の連続的測位プログラム。
【数6】
【0021】
請求項9に係る発明
現在における移動体の測位結果として生成された移動体の測位結果情報における平均遅延時間を算出し、現在における移動体の測位結果として生成された移動体の測位結果情報に、高感度GPS受信機によって得た現在と当該平均遅延時間だけ前の時点における移動体の測位結果の差を加算し、これを現在における移動体の測位結果として移動体の測位結果情報を生成する第十五の移動体の測位結果情報生成機能を更にコンピュータに実現させることを特徴とする請求項7又は8記載の無線LAN測位とGPS測位とを併用した移動体の連続的測位プログラム。
【発明の効果】
【0022】
本案発明のアルゴリズムは、ある時点の融合結果の計算には、それ以前の無線LAN測位の結果、GPS測位の結果、及びGPS測位に付随して得られるDOPのみを使用しており、リアルタイム処理に適用できる。また、本願の請求項1〜9に係る発明は、前述した従来技術で採用していた「無線LAN測位の結果とGPS測位の結果の重み付き平均」に替えて、理論的根拠が明確な重みを用いた重みつき平均を採用しており、その根拠は明確である。
【0023】
本案発明を実データに適用した結果、写真測量学会で発表されたアルゴリズムより、精度が高いことが示された。
【発明を実施するための最良の形態】
【0024】
以下、添付図面を参照して本発明の好ましい実施の形態を説明する。
【0025】
本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム(装置)は、以下に説明する本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位方法をコンピュータに実行させるコンピュータプログラムの指示の下に所定の処理動作を行う汎用コンピュータあるいは、専用コンピュータなどからなる。
【実施例1】
【0026】
この本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、外部と有線又は無線での情報交信を行うインターフェース部からなる情報取得部で取得した、GPS受信機によって得た現在及び直前の一又は複数の時刻における移動体の測位結果のばらつきを判定する第一の判定処理部101を備えている。
【0027】
以下では、GPS受信機、無線LAN測位装置については1秒ごとにデータが得られる場合について説明する。
【0028】
また、GPS受信機の測位結果のばらつきを判定するために直前の3時点と現在のGPS受信機の測位結果を利用している一例を示す。
【0029】
更に、この実施例及び、以下の実施例では、無線LAN測位の有効範囲は座標軸に平行な矩形とする一例を示す。
【0030】
ただし、これ以外の形態でも本発明は実施可能である。
【0031】
本発明の移動体の連続的測位システム1がGPS受信機によって得た現在の時刻における移動体の測位結果を情報取得部で取得する(ステップ1001)。
【0032】
GPS受信機によって得た現在における移動体の測位結果を情報取得部で取得すると、その測位結果は、測位計測時刻と関連付けられて、コンピュータからなる本発明の移動体の連続的測位システム1の記憶部に記憶されて蓄積される。ここで、測位計測時刻と関連付けられて記憶部に記憶されるGPS受信機によって得た現在における移動体の測位結果の件数をあらかじめ定めてある件数にすることができる。本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システムが携帯電話等の資源の限られた機器に組み込まれる場合には、このように蓄積する件数を所定の数にすることが重要になる。
【0033】
こうして蓄積された過去の測位結果は、必要に応じて記憶部から取り出されて利用される。例えば、GPS受信機によって得た現在及び直前の一又は複数の時刻における移動体の測位結果のばらつきを判定する処理に利用される。
【0034】
また、本発明の移動体の連続的測位システム1が、無線LAN測位装置によって得た移動体の現在の時刻における移動体の測位結果を情報取得部で取得すると、その測位結果は、測位計測時刻と関連付けられて、コンピュータからなる本発明の移動体の連続的測位システム1の記憶部に記憶されて蓄積される。ここでも、測位計測時刻と関連付けられて記憶部に記憶される無線LAN測位装置によって得た移動体の現在の時刻における移動体の測位結果の件数をあらかじめ定められた件数にすることができる。
【0035】
こうして蓄積された過去の測位結果は、必要に応じて記憶部から取り出されて利用される。例えば、無線LAN測位装置によって得た移動体の現在の測位結果、又は現在及び直前の一つの時刻における移動体の測位結果、もしくは現在及び直前の複数の時刻における移動体の測位結果の中間値又は平均値を求める処理に利用される。
【0036】
ここでは、現在の時刻をt、GPS受信機によって得た現在の時刻における移動体の測位結果をXG(t)(座標はUTM座標系)(長さの単位はm、時間の単位は秒(本明細書における以下の説明においても同様とする))、GPS受信機によって得た直前の3時刻t−1、t−2、t−3における移動体の測位結果をそれぞれXG(t−1)、XG(t−2)、XG(t−3)と表示する。
【0037】
本発明の移動体の連続的測位システム1の記憶部には、前記の第一の判定処理部101によって、GPS受信機によって得た現在及び直前の一又は複数の時刻における移動体の測位結果のばらつきを判定する際に参照する、予め定められたばらつきの制限LAに関するデータが格納されている。
【0038】
本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、第一の測位結果情報生成処理部102を備えている。
【0039】
前記の第一の判定処理部101によって行われる、GPS受信機によって得た現在及び直前の一又は複数の時刻における移動体の測位結果のばらつきを判定する処理(ステップ1002)の結果、GPS受信機によって得た移動体の現在及び直前の一又は複数の時刻における測位結果のばらつきがいずれも予め定めてある範囲内である場合、当該第一の測位結果情報生成処理部102によって、前記GPS受信機によって得た現在の時刻tにおける測位結果XG(t)を現在における移動体の測位結果XR(t)として移動体の測位結果情報を生成する処理が行われる(ステップ1003)。
【0040】
前記の第一の判定処理部101によって行われる、GPS受信機によって得た現在及び直前の一又は複数の時刻における移動体の測位結果のばらつきを判定する処理(ステップ1002)は、この実施例のように、GPS受信機によって得た現在及び直前の3時刻における移動体の測位結果のばらつきを判定する場合には、例えば、以下の(数7)の条件が満たされるか否かを判定する処理として行われる。
【数7】
【0041】
前記のステップ1002における処理の結果、GPS受信機によって得た移動体の現在及び直前の一又は複数の時刻(この実施例の場合、直前の3時刻)における測位結果のばらつきがいずれも予め定めてある範囲内である場合、すなわち、前記の(数7)が成立する場合には、移動体の測位結果を表す移動体の測位結果情報XR(t)として、前記GPS受信機によって得た現在の時刻tにおける測位結果XG(t)を出力する処理が第一の測位結果情報生成処理部102によって行われる(ステップ1003)。
【0042】
本発明の移動体の連続的測位システム1は、無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する第二の判定処理部103を備えている。
【0043】
そこで、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果、又は、現在及び直前の一つの時刻t−1における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する処理(ステップ1004)が当該第二の判定処理部103によって行われる。
【0044】
この第二の判定処理部103の判定結果については、測位の時刻、測位結果、判定の結果(予め定めてある範囲内にある、あるいはない)が関連付けられて記憶部に記憶される。
【0045】
本発明の移動体の連続的測位システム1の記憶部には、前記の第二の判定処理部103によって、無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する際に参照する予め定められた範囲、例えば、無線LANの有効範囲のx座標の下限:LBX1、x座標の上限:LBX2、y座標の下限:LBY1、y座標の上限:LBY2に関するデータが格納されている。
【0046】
前記の第二の判定処理部103によって行われる、無線LAN測位装置によって得た現在の時刻における移動体の測位結果が予め定めてある範囲内にあるかどうかを判定する処理(ステップ1004)は、例えば、無線LAN測位装置によって得た現在の時刻tにおける移動体の測位結果をXL(t)=(xL(t),yL(t))(UTM座標系での2次元ベクトル)とし、以下の(数8)の条件が満たされるかどうかによって判定される。
【数8】
【0047】
この(数8)が満たされている場合には、無線LAN測位装置によって得た現在の時刻における移動体の測位結果が予め定めてある範囲内にあるということになる。
【0048】
また、前記の第二の判定処理部103によって行われる、無線LAN測位装置によって得た現在及び直前の一つの時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する処理(ステップ1004)は、無線LAN測位装置によって得た現在の時刻tにおける移動体の測位結果については、前記の(数8)の条件が満たされるかどうかによって判定され、無線LAN測位装置によって得た直前の一つの時刻における測位結果については、無線LAN測位装置によって得た直前の一つの時刻t−1における移動体の測位結果をXL(t−1)=(xL(t−1),yL(t−1))(UTM座標系での2次元ベクトル)とし、以下の(数9)の条件が満たされるかどうかによって判定される。
【数9】
【0049】
(数8)及びこの(数9)が満たされている場合には、無線LAN測位装置によって得た現在及び直前の一つの時刻における移動体の測位結果が予め定めてある範囲内にあるということになる。
【0050】
更に、前記の第二の判定処理部103によって行われる、無線LAN測位装置によって得た現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する処理(ステップ1004)は、無線LAN測位装置によって得た現在の時刻tにおける移動体の測位結果については、前記の(数8)の条件が満たされるかどうかによって判定され、無線LAN測位装置によって得た直前の複数の時刻における測位結果については、複数として具体的に直前のn個(nは2以上の整数)の時刻とすると、無線LAN測位装置によって得た直前の複数の時刻t−m(m=1、2、・・・n)における移動体の測位結果をXL(t−m)=(xL(t−m),yL(t−m))(UTM座標系での2次元ベクトル)とし、1からnまでの全ての整数mについて以下の(数10)の条件が満たされるかどうかによって判定される。
【数10】
【0051】
(数8)及び1からnまでの全ての整数mについてこの(数10)が満たされていれば、無線LAN測位装置によって得た現在及び直前の複数の(この例ではn個の)時刻における測位結果は予め定めてある範囲内にあるということになる。
【0052】
なお、「現在の時刻における測位結果」、「現在及び直前の一つの時刻における測位結果」、「現在及び直前の複数の時刻における測位結果」のいずれについて、予め定めてある範囲内にあるかどうかを判定することにするかは、あらかじめ定めておき、このあらかじめ定めてあるところのコンピュータプログラムの指示により、「現在の時刻における測位結果」、「現在及び直前の一つの時刻における測位結果」、「現在及び直前の複数の時刻における測位結果」のいずれかについて、予め定めてある範囲内にあるかどうかを判定する処理が行われる。
【0053】
本発明の移動体の連続的測位システム1は、前記第二の判定処理部103が行う判定処理(ステップ1004)の結果によって得られた、無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数を、あらかじめ定めてある数(A)と比較する第三の判定処理部104を備えている。
【0054】
そこで、前記第二の判定処理部103が行う判定処理(ステップ1004)の結果によって得られた、無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数を、あらかじめ定めてある数(A)と比較する処理(ステップ1005)が当該第三の判定処理部104によって行われる。
【0055】
この第三の判定処理部104の判定結果は、記憶部に記憶される。
【0056】
この第三の判定処理部104によって行われる、前記第二の判定処理部103が行う判定処理(ステップ1004)の結果によって得られた無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数を、あらかじめ定めてある数(A)と比較する処理は、たとえば、前記第二の判定処理部103が行う判定処理(ステップ1004)が、無線LAN測位装置によって得た移動体の現在の時刻における測位結果について、それが予め定めてある範囲内にあるかどうかを判定する処理である場合には、あらかじめ定めてある数(A)を1、前記第二の判定処理部103が行う判定処理(ステップ1004)が、無線LAN測位装置によって得た移動体の現在及び直前の一つの時刻における測位結果について、それが予め定めてある範囲内にあるかどうかを判定する処理である場合には、あらかじめ定めてある数(A)を2、前記第二の判定処理部103が行う判定処理(ステップ1004)が、無線LAN測位装置によって得た移動体の現在及び直前の複数(その数を2以上の整数nとする)の時刻における測位結果について、それが予め定めてある範囲内にあるかどうかを判定する処理である場合には、あらかじめ定めてある数(A)をnとして、行うこともできる。この場合は、無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の全てが予め定めてある範囲内にあるかどうかを判定することになる。
【0057】
本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、前記の第二の判定処理部103の判定結果、記憶部に記憶されている、測位の時刻、測位結果、判定の結果(予め定めてある範囲内にある、あるいはない)と、前記第三の判定処理部104によって行われる、前記第二の判定処理部103が行う判定処理(ステップ1004)の結果によって得られた無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数を、あらかじめ定めてある数(A)と比較する処理の結果を参照して、予め定めてある範囲内となった数があらかじめ定められた数(A)以上であると認められた無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する無線LAN測位結果平均値算出手段105を備えている。
【0058】
なお、ここで、(数8)、(数9)あるいは(数10)を満たしている時点の測位結果のみを使用して、中間値又は平均値を算出するように、無線LAN測位結果平均値算出手段105を構成することも可能である。
【0059】
また、無線LAN測位結果平均値算出手段105で算出された中間値又は平均値を、現在における移動体の測位結果として移動体の測位結果情報を生成する第二の測位結果情報生成処理部106を備えている。
【0060】
この無線LAN測位結果平均値算出手段105、第二の測位結果情報生成処理部106によって、GPS受信機によって得た移動体の現在及び直前の一又は複数の時刻における測位結果のいずれかのばらつきが予め定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数(A)以上である場合に、予め定めてある範囲内となった数があらかじめ定められた数(A)以上であると認められた無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を、現在における移動体の測位結果として移動体の測位結果情報を生成するステップ(ステップ1006)が行われる。
【0061】
例えば、前記第二の判定処理部103が行う判定処理(ステップ1004)が無線LAN測位装置によって得た移動体の現在の時刻における測位結果XL(t)、1秒前の測位結果X(t−1)、2秒前の測位結果X(t−2)について行われ、前記の(数8)、m=1とした(数10)、m=2とした(数10)の中で成立しているものが(数8)とm=2とした(数10)のみである、すなわちXL(t)とX(t−2)との2つのみがあらかじめ定めた範囲内であったとし、前記のあらかじめ定められた数(A)が2であるとすれば、これは、第三の判定処理部104によって行われる、前記第二の判定処理部103が行う判定処理(ステップ1004)の結果によって得られた無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数が2であり、あらかじめ定められた数(A)以上であるため、無線LAN測位結果平均値算出手段105が(数8)、(数9)あるいは(数10)を満たしている時点の測位結果のみを使用して中間値又は平均値を算出するように構成されている場合には、前記の(数8)とm=2とした(数10)とが成立して測位結果があらかじめ定めてある範囲内であると認められたXL(t)とXL(t−2)とを平均して{XL(t)+XL(t−2)}/2が、あるいはXL(t)とXL(t−2)中間値{XL(t)+XL(t−2)}/2が、現在における移動体の測位結果情報として生成される。
【0062】
また、前記の(数8)、m=1とした(数10)、m=2とした(数10)の全てが成立している場合、すなわちXL(t)と、XL(t−1)と、XL(t−2)との3つがあらかじめ定められた範囲内であったとし、前記のあらかじめ定められた数(A)が2であるとれば、これは、第三の判定処理部104によって行われる、前記第二の判定処理部103が行う判定処理(ステップ1004)の結果によって得られた無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数が3であり、あらかじめ定められた数(A)以上であるため、前記の(数8)と、m=1とした(数10)と、m=2とした(数10)とが成立して測位結果があらかじめ定めてある範囲内であると認められたXL(t)と、XL(t−1)と、XL(t−2)とを平均して{XL(t)+XL(t−1)+XL(t−2)}/3が、あるいは、これらの中間値として次の値が、現在における移動体の測位結果情報として生成される。
【0063】
なお、前記において、XL(t)=(xL(t),yL(t))、XL(t−1)=(xL(t−1),yL(t−1))、XL(t−2)=(xL(t−2),yL(t−2))の中間値は、これらのベクトルのx成分の中間値xmとy成分の中間値ymを成分とするベクトル(xm,ym)である。x成分の中間値xmは、xL(t)、xL(t−1)、xL(t−2)の最大値でも最小値でもない値であり、y成分の中間値ymは、yL(t)、yL(t−1)、yL(t−2)の最大値でも最小値でもない値である。
【0064】
本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、第三の測位結果情報生成処理部107を備えている。
【0065】
GPS受信機によって得た移動体の現在及び直前の一又は複数の時刻における測位結果のいずれかのばらつきが予め定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数より少ない場合には、この第三の測位結果情報生成処理部107により、直前における移動体の測位結果XR(t−1)を現在における移動体の測位結果XR(t)として移動体の測位結果情報を生成する処理が、この第三の測位結果情報生成処理部107によって行われる(ステップ1007)。
【0066】
なお、以上に説明したように、本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1と、これによる、無線LAN測位とGPS測位とを併用した移動体の連続的測位方法によれば、第一の判定処理部101によって行われる、GPS受信機によって得た現在及び直前の一又は複数の時刻における移動体の測位結果のばらつきを判定する処理(ステップ1002)の結果、前記の(数7)が成立せず、GPS受信機によって得た移動体の現在及び直前の一又は複数の時刻における測位結果のいずれかのばらつきが予め定めてある範囲外である場合であって、前記第二の判定処理部103が行う判定処理(ステップ1004)が、無線LAN測位装置によって得た移動体の現在の時刻における測位結果について、それが予め定めてある範囲内にあるかどうかを判定する処理であって、第三の判定処理部104によって行われる、前記第二の判定処理部103が行う判定処理(ステップ1004)の結果によって得られた無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数(A)が1であるときには、前記第二の判定処理部103が行う判定処理(ステップ1004)によって、無線LAN測位装置によって得た移動体の現在の時刻における測位結果が予め定めてある範囲内にあると認められれば、無線LAN測位結果平均値算出手段105によって、無線LAN測位装置によって得た移動体の現在の時刻における測位結果の中間値又は平均値が算出され、これは、すなわち、無線LAN測位装置によって得た移動体の現在の時刻における測位結果が、現在における移動体の測位結果として移動体の測位結果情報が生成されるものになる。
【実施例2】
【0067】
実施例2の本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、請求項2に係る発明に対応するものである。
【0068】
図1、図2を用いて説明した本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム及び、これによる連続的測位方法と共通する部分には共通する符号を用いて、その説明を省略する。
【0069】
実施例2の本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、図1を用いて説明した実施例1のシステムにおける第三の測位結果情報生成処理部107に替えて、GPS受信機によって得た移動体の現在及び直前の一又は複数の時刻における測位結果のいずれかのばらつきが予め定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数より少ない場合、図3図示のように、直前の時刻t−1における移動体の測位結果の値XR(t−1)に、高感度GPS受信機によって得た当該直前の時点t−1から現在tまでの移動体の移動量を加算する処理を行う第一の加算処理部108と、当該加算処理の結果の値を、現在の時刻tにおける移動体の測位結果として出力する処理を行う第四の測位結果情報生成処理部109とを使用するものである。
【0070】
この実施例2の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1によれば、図4図示のように、GPS受信機によって得た移動体の現在及び直前の一又は複数の時刻における測位結果のいずれかのばらつきが予め定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数より少ない場合、第一の加算処理部108によって、直前の時刻t−1における移動体の測位結果の値XR(t−1)に、高感度GPS受信機によって得た当該直前の時点t−1から現在tまでの移動体の移動量を加算する処理が行われる(ステップ4007)(図4)。そして、第四の測位結果情報生成処理部109により、前記の加算処理の結果の値が、現在の時刻tにおける移動体の測位結果XR(t)(現在の移動体の位置)として出力される(ステップ4008)((図4)。
【0071】
ここで、第一の加算処理部108が行う、高感度GPS受信機によって得た当該直前の時点t−1から現在tまでの移動体の移動量を加算する処理は、例えば、次の(数11)のようにして行われる。
【数11】
【実施例3】
【0072】
この実施例で説明する本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、請求項3に係る発明に対応するものである。
【0073】
図1〜図4を用いて説明した本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム及び、これによる連続的測位方法と共通する部分には共通する符号を用いて、その説明を省略する。
【0074】
図3図示の本発明の移動体の連続的測位システム1は、外部と有線又は無線での情報交信を行うインターフェース部からなる情報取得部で取得した、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果とを比較する第一の比較処理部501を備えている(図5)。
【0075】
以下でも、実施例1と同様に、高感度GPS受信機以外のGPS受信機、高感度GPS受信機、無線LAN測位装置については1秒ごとにデータが得られる場合について説明する。また、無線LAN測位の有効範囲は座標軸に平行な矩形とする一例を示す。
【0076】
本発明の移動体の連続的測位システム1が、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果とを情報取得部で取得する(ステップ6001)(図6)。
【0077】
高感度GPS受信機によって得た現在の時刻における移動体の測位結果、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果を情報取得部で取得すると、それぞれの測位結果は、高感度GPS受信機によって得た測位結果であるのか、高感度GPS受信機以外のGPS受信機によって得た測位結果であるのかを認識する情報とともに、測位計測時刻と関連付けられて、コンピュータからなる本発明の移動体の連続的測位システム1の記憶部に記憶されて蓄積される。ここで、記憶部に記憶される高感度GPS受信機によって得た測位結果、高感度GPS受信機以外のGPS受信機によって得た測位結果の件数をあらかじめ定めてある件数にすることができる。本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システムが携帯電話等の資源の限られた機器に組み込まれる場合には、このように蓄積する件数を所定の数にすることが重要になる。
【0078】
こうして蓄積された過去の測位結果は、必要に応じて記憶部から取り出されて利用される。例えば、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果とを比較する処理に利用される。
【0079】
この実施例3でも、実施例1で説明したのと同じく、本発明の移動体の連続的測位システム1が、無線LAN測位装置によって得た移動体の現在の時刻における移動体の測位結果を情報取得部で取得すると、その測位結果は、測位計測時刻と関連付けられて、コンピュータからなる本発明の移動体の連続的測位システム1の記憶部に記憶されて蓄積される。ここでも、測位計測時刻と関連付けられて記憶部に記憶される無線LAN測位装置によって得た移動体の現在の時刻における移動体の測位結果の件数をあらかじめ定められた件数にすることができる。
【0080】
こうして蓄積された過去の測位結果は、必要に応じて記憶部から取り出されて利用される。例えば、無線LAN測位装置によって得た移動体の現在の測位結果、又は現在及び直前の一つの時刻における移動体の測位結果、もしくは現在及び直前の複数の時刻における移動体の測位結果の中間値又は平均値を求める処理に利用される。
【0081】
ここでは、現在の時刻をt、高感度GPS受信機によって得た現在の時刻における移動体の測位結果をXH(t)(座標はUTM座標系)、高感度GPS受信機以外のGPS受信機によって得た現在の時刻tにおける移動体の測位結果をXG(t)と表示する。
【0082】
本発明の移動体の連続的測位システム1の記憶部には、前記の第一の比較処理部501によって、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果とを比較する際に参照するデータが格納されている。このデータは、例えば、両者の差が制限(LC)の範囲内であるかどうかを判定するために利用される。
【0083】
そこで、例えば、前記の第一の比較処理部501によって行われる、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果とを比較する処理(ステップ6002)は、以下の(数12)の条件が満たされるか否かを判定する処理として行われる。
【数12】
【0084】
本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、第五の測位結果情報生成処理部502を備えている。
【0085】
前記の第一の比較処理部501によって行われる、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果とを比較する処理(ステップ6002)の結果、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果との差があらかじめ定めている範囲内である、すなわち、前記の(数12)が成立する場合には、当該第五の測位結果情報生成処理部502によって、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果XG(t)を現在における移動体の測位結果XR(t)として移動体の測位結果情報を生成する処理が行われる(ステップ6003)。
【0086】
この実施例3においても、実施例1と同じく、本発明の移動体の連続的測位システム1は、無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する第二の判定処理部103を備えており、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果、又は、現在及び直前の一つの時刻t−1における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する処理(ステップ6004)が当該第二の判定処理部103によって行われる。
【0087】
この第二の判定処理部103の判定結果については、測位の時刻、測位結果、判定の結果(予め定めてある範囲内にある、あるいはない)が関連付けられて記憶部に記憶される。
【0088】
この第二の判定処理部103が行う処理動作は、実施例1で説明したものと同様であるので、説明を省略する。
【0089】
また、この実施例3においても、実施例1と同じく、本発明の移動体の連続的測位システム1は、前記第二の判定処理部103が行う判定処理(ステップ6004)の結果によって得られた、無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数を、あらかじめ定めてある数(A)と比較する第三の判定処理部104を備えていて、前記第二の判定処理部103が行う判定処理(ステップ6004)の結果によって得られた、無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数を、あらかじめ定めてある数(A)と比較する処理(ステップ6005)が当該第三の判定処理部104によって行われる。この第三の判定処理部104の判定結果は、記憶部に記憶される。
【0090】
この第三の判定処理部104が行う処理動作も、実施例1で説明したものと同様であるので、説明を省略する。
【0091】
また、この実施例3においても、実施例1と同じく、本発明の移動体の連続的測位システム1は、実施例1で説明した無線LAN測位結果平均値算出手段105を備えている。この無線LAN測位結果平均値算出手段105が、前述した(数8)、(数9)あるいは(数10)を満たしている時点の測位結果のみを使用して、中間値又は平均値を算出するように構成可能であることも実施例1と同様である。
【0092】
また、無線LAN測位結果平均値算出手段105で算出された中間値又は平均値を、現在における移動体の測位結果として移動体の測位結果情報を生成する第二の測位結果情報生成処理部106を備えている。
【0093】
この無線LAN測位結果平均値算出手段105、第二の測位結果情報生成処理部106によって、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果との差が予め定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数(A)以上である場合に、予め定めてある範囲内となった数があらかじめ定められた数(A)以上であると認められた無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を、現在における移動体の測位結果として移動体の測位結果情報を生成するステップ(ステップ6006)が行われる。
【0094】
この処理動作も、実施例1で説明したものと基本的に同様である。
【0095】
この実施例3の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1も、実施例1と同様に、第三の測位結果情報生成処理部107を備えている。
【0096】
高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果との差が予め定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数より少ない場合には、この第三の測位結果情報生成処理部107により、直前における移動体の測位結果XR(t−1)を現在における移動体の測位結果XR(t)として移動体の測位結果情報を生成する処理が、この第三の測位結果情報生成処理部107によって行われる(ステップ6007)。
【実施例4】
【0097】
図7、図8図示に係る実施例4の本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、請求項4に係る発明に対応するもので、実施例3のシステムに対して、実施例1のシステムに対する実施例2のシステムの関係にある。
【0098】
図1〜図6を用いて説明した本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム及び、これによる連続的測位方法と共通する部分には共通する符号を用いて、その説明を省略する。
【0099】
図5を用いて説明した実施例3のシステムにおける第三の測位結果情報生成処理部107を使用することに替えて、高感度GPS受信機によって得た現在の時刻における移動体の測位結果と、高感度GPS受信機以外のGPS受信機によって得た現在の時刻における移動体の測位結果との差が予め定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数より少ない場合、図7図示のように、直前の時刻t−1における移動体の測位結果の値XR(t−1)に、高感度GPS受信機によって得た当該直前の時点t−1から現在tまでの移動体の移動量を加算する処理を行う第一の加算処理部108と、当該加算処理の結果の値を、現在の時刻tにおける移動体の測位結果として出力する処理を行う第四の測位結果情報生成処理部109とを使用するものである。
【0100】
この実施例4のシステムの処理動作は、前述した実施例2のシステムの処理動作と同様であるので、説明を省略する。
【実施例5】
【0101】
図9、図10を参照して本発明の他の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1を説明する。この連続的測位システム1は、請求項5に係る発明に対応するものである。図1〜図6を用いて説明した本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム及び、これによる連続的測位方法と共通する部分には共通する符号を用いて、その説明を省略する。
【0102】
ここでは、DOPとして、平面位置の精度の指標であるHDOPを使用し、無線LAN測位の有効範囲は座標軸に平行な矩形とする例を示す。
【0103】
この本発明の移動体の連続的測位システム1は、外部と有線又は無線での情報交信を行うインターフェース部からなる情報取得部で取得した、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めてある範囲にあるかどうかを判定する判定処理部901を備えている。
【0104】
以下でも、実施例1と同様に、GPS受信機、無線LAN測位装置については1秒ごとにデータが得られる場合について説明する。また、無線LAN測位の有効範囲は座標軸に平行な矩形とする一例を示す。
【0105】
本発明の移動体の連続的測位システム1が、GPS受信機によって得た現在の時刻における移動体の測位結果を情報取得部で取得する(ステップ10001)。
【0106】
GPS受信機によって得た現在の時刻における移動体の測位結果は、同時に得られるHDOPの値とともに、測位計測時刻と関連付けられて、コンピュータからなる本発明の移動体の連続的測位システム1の記憶部に記憶されて蓄積される。ここで、記憶部に記憶されるGPS受信機によって得た測位結果の件数はあらかじめ定められている所定の数にすることができる。
【0107】
こうして蓄積された過去の測位結果は、必要に応じて記憶部から取り出されて利用される。例えば、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めてある範囲にあるかどうかを判定する処理に利用される。
【0108】
この実施例5でも、実施例1で説明したのと同じく、本発明の移動体の連続的測位システム1が、無線LAN測位装置によって得た移動体の現在の時刻における移動体の測位結果を情報取得部で取得すると、その測位結果は、測位計測時刻と関連付けられて、コンピュータからなる本発明の移動体の連続的測位システム1の記憶部に記憶されて蓄積される。ここでも、測位計測時刻と関連付けられて記憶部に記憶される無線LAN測位装置によって得た移動体の現在の時刻における移動体の測位結果の件数をあらかじめ定められた件数にすることができる。
【0109】
こうして蓄積された過去の測位結果は、必要に応じて記憶部から取り出されて利用される。例えば、無線LAN測位装置によって得た移動体の現在の測位結果、又は現在及び直前の一つの時刻における移動体の測位結果、もしくは現在及び直前の複数の時刻における移動体の測位結果の中間値又は平均値を求める処理に利用される。
【0110】
ここでは、現在の時刻をt、GPS受信機によって得た現在の時刻における移動体の測位結果をXG(t)(座標はUTM座標系)、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値をD(t)と表示する。
【0111】
本発明の移動体の連続的測位システム1の記憶部には、前記の判定処理部901によって、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めてある範囲にあるかどうかを判定する際に参照するデータが格納されている。このデータは、例えば、HDOPの値が制限(LD)の範囲内であるかどうかを判定するために使用される。
【0112】
そこで、例えば、判定処理部901によって、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めてある範囲にあるかどうかを判定する処理(ステップ10002)は、以下の(数13)の条件が満たされるか否かを判定する処理として行われる。
【数13】
【0113】
なお、GPS受信機で得られた測位モードにより場合わけを行い、測位モードごとにLDの値を変える実施形態も可能である。
【0114】
本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、第六の測位結果情報生成処理部902を備えている。
【0115】
前記の判定処理部901によって、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めてある範囲にあるかどうかを判定する処理(ステップ10002)の結果、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めている範囲内である、すなわち、前記の(数13)が成立する場合には、当該第六の測位結果情報生成処理部902によって、GPS受信機によって得た現在の時刻における移動体の測位結果XG(t)を現在における移動体の測位結果XR(t)として移動体の測位結果情報を生成する処理が行われる(ステップ10003)。
【0116】
この実施例5においても、実施例1と同じく、本発明の移動体の連続的測位システム1は、無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する第二の判定処理部103を備えており、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果、又は、現在及び直前の一つの時刻t−1における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定する処理(ステップ10004)が当該第二の判定処理部103によって行われる。
【0117】
この第二の判定処理部103の判定結果については、測位の時刻、測位結果、判定の結果(予め定めてある範囲内にある、あるいはない)が関連付けられて記憶部に記憶される。
【0118】
この第二の判定処理部103が行う処理動作は、実施例1で説明したものと同様であるので、説明を省略する。
【0119】
また、この実施例5においても、実施例1と同じく、本発明の移動体の連続的測位システム1は、前記第二の判定処理部103が行う判定処理(ステップ10004)の結果によって得られた、無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数を、あらかじめ定めてある数(A)と比較する第三の判定処理部104を備えていて、前記第二の判定処理部103が行う判定処理(ステップ10004)の結果によって得られた、無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数を、あらかじめ定めてある数(A)と比較する処理(ステップ10005)が当該第三の判定処理部104によって行われる。この第三の判定処理部104の判定結果は、記憶部に記憶される。
【0120】
この第三の判定処理部104が行う処理動作も、実施例1で説明したものと同様であるので、説明を省略する。
【0121】
また、この実施例5においても、実施例1と同じく、本発明の移動体の連続的測位システム1は、実施例1で説明した無線LAN測位結果平均値算出手段105を備えている。この無線LAN測位結果平均値算出手段105が、前述した(数8)、(数9)あるいは(数10)を満たしている時点の測位結果のみを使用して、中間値又は平均値を算出するように構成可能であることも実施例1と同様である。
【0122】
また、無線LAN測位結果平均値算出手段105で算出された中間値又は平均値を、現在における移動体の測位結果として移動体の測位結果情報を生成する第二の測位結果情報生成処理部106を備えている。
【0123】
この無線LAN測位結果平均値算出手段105、第二の測位結果情報生成処理部106によって、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数(A)以上である場合に、予め定めてある範囲内となった数があらかじめ定められた数(A)以上であると認められた無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を、現在における移動体の測位結果として移動体の測位結果情報を生成するステップ(ステップ10006)が行われる。
【0124】
この処理動作も、実施例1で説明したものと基本的に同様である。
【0125】
この実施例5の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1も、実施例1と同様に、第三の測位結果情報生成処理部107を備えている。
【0126】
GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めてある範囲外である場合であって、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数より少ない場合には、この第三の測位結果情報生成処理部107により、直前における移動体の測位結果XR(t−1)を現在における移動体の測位結果XR(t)として移動体の測位結果情報を生成する処理が、この第三の測位結果情報生成処理部107によって行われる(ステップ10007)。
【実施例6】
【0127】
図11、図12図示に係る実施例6の本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1は、請求項6に係る発明に対応するもので、実施例5のシステムに対して、実施例1のシステムに対する実施例2のシステムの関係にある。
【0128】
図1〜図10を用いて説明した本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム及び、これによる連続的測位方法と共通する部分には共通する符号を用いて、その説明を省略する。
【0129】
図9を用いて説明した実施例5のシステムにおける第三の測位結果情報生成処理部107を使用することに替えて、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOPの値があらかじめ定めてある範囲外であり、かつ無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果が予め定めてある範囲内にあるかどうかを判定して予め定めてある範囲内となった数が、あらかじめ定められた数より少ない場合、図11図示のように、直前の時刻t−1における移動体の測位結果の値XR(t−1)に、高感度GPS受信機によって得た当該直前の時点t−1から現在tまでの移動体の移動量を加算する処理を行う第一の加算処理部108と、当該加算処理の結果の値を、現在の時刻tにおける移動体の測位結果として出力する処理を行う第四の測位結果情報生成処理部109とを使用するものである。
【0130】
この実施例6のシステムの処理動作は、前述した実施例2のシステムの処理動作と同様であるので、説明を省略する。
【実施例7】
【0131】
図13、図14を用いて、本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1を説明する。このシステムは請求項7記載の発明に対応している。
【0132】
図1〜図12を用いて説明した本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム及び、これによる連続的測位方法と共通する部分には共通する符号を用いて、その説明を省略する。
【0133】
ここでは、DOPとして、平面位置の精度の指標であるHDOPを使用し、無線LAN測位の有効範囲は座標軸に平行な矩形とする例を示す。
【0134】
この連続的測位システム1は、外部と有線又は無線での情報交信を行うインターフェース部からなる情報取得部で取得した、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する算出処理部1301を備えている。
【0135】
また、無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、無線LAN測位装置によって得た移動体の現在及び直前の一つの時刻における測位結果、若しくは、無線LAN測位装置によって得た移動体の現在及び直前の複数の時刻における測位結果を用いて、無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する算出処理部1302を備えている。
【0136】
ここで、無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出するにあたり、「無線LAN測位装置によって得た移動体の現在の時刻における測位結果」、「無線LAN測位装置によって得た移動体の現在及び直前の一つの時刻における測位結果」、「無線LAN測位装置によって得た移動体の現在及び直前の複数の時刻における測位結果」の中のいずれを用いるかは、あらかじめ定めておき、このあらかじめ定めているところのコンピュータプログラムの指示により、算出処理部1302により、「無線LAN測位装置によって得た移動体の現在の時刻における測位結果」、「無線LAN測位装置によって得た移動体の現在及び直前の一つの時刻における測位結果」、「無線LAN測位装置によって得た移動体の現在及び直前の複数の時刻における測位結果」の中のいずれかを用いて、無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度が算出される。
【0137】
更に、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果、又は、現在及び直前の一つの時刻t−1における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する算出処理部1303を備えている。
【0138】
更に、前記算出処理部1301によって算出された、GPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、前記算出処理部1302によって算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出処理部1303によって算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとして、GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値とを平均する算出処理部1304を備えている。
【0139】
以下では、GPS受信機、無線LAN測位装置については1秒ごとにデータが得られる場合について説明する。
【0140】
この実施例及び、以下の実施例では、無線LAN測位の有効範囲は座標軸に平行な矩形とする一例を示す。
【0141】
ただし、これ以外の形態でも本発明は実施可能である。
【0142】
本発明の移動体の連続的測位システム1がGPS受信機によって得た現在の時刻における移動体の測位結果を情報取得部で取得する(ステップ14001)。
【0143】
こうして取得したGPS受信機によって得た現在における移動体の測位結果を記憶部に記憶しておくことに関しては実施例1と同様である。
【0144】
また、このシステム1が、無線LAN測位装置によって得た移動体の現在の時刻における移動体の測位結果を情報取得部で取得して、それが記憶部に記憶されていくことに関しても実施例1と同様である。
【0145】
ここでは、現在の時刻をt、GPS受信機によって得た現在の時刻における移動体の測位結果をXG(t)(座標はUTM座標系)と表示する。
【0146】
GPS受信機よって得た現在の時刻における移動体の測位結果におけるHDOP値をD(t)とする。
【0147】
現在の時刻をtとし、算出処理部1301は、D(t)を用いて、GPS受信機よって得た現在の時刻における移動体の測位結果の精度EG(t)を、以下の方法により計算する(ステップ14002)。
【0148】
すなわち、GPS受信機よって得た現在の時刻における移動体の測位が、3次元測位モードでかつDGPSモードで行われた場合は、 EG(t)=EG1×D(t)、3次元測位モードでかつ単独測位モードで行われた場合は、EG(t)=EG2×D(t)、2次元測位モードでかつDGPSモードで行われた場合は、EG(t)=EG3×D(t)、2次元測位モードでかつ単独測位モードで行われた場合は、EG(t)=EG4×D(t)という計算式によって移動体の測位結果の精度EG(t)を計算により求める。例えば、EG1=1.0、EG2=1.5、EG3=2.0、EG4=3.0とする。もちろん、このような場合わけを行わず、全ての場合に同じEG(t)の計算方式を使用することもできる。
【0149】
一方、算出処理部1302によって行われる、無線LAN測位装置によって得た移動体の現在の時刻における測位結果の精度算出(ステップ14003)は、次のように行われる。
【0150】
実施例1における、第二の判定処理部103が行う判定処理(ステップ1004)の結果によって得られた、無線LAN測位装置によって得た移動体の測位結果があらかじめ定めてある範囲内である数をk個、第二の判定処理部103が行う判定処理(ステップ1004)において行われた判定数(k個の母数;たとえば、現在と直前の2時点の判定なら3)をlとし、下記(数14)により、現在の無線LAN測位結果の精度EL(t)を求める。
【数14】
【0151】
前記の(数14)におけるあらかじめ定められている乗数EL1、EL2は、前記の算出処理部1302による処理動作のために、本発明のシステム1の記憶部に格納しておくことができる。
【0152】
算出処理部1303によって行われる、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果、又は、現在及び直前の一つの時刻t−1における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する処理(ステップ14004)は、次のように行われる。
【0153】
あらかじめ定められているところにより、コンピュータプログラムの指示が、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果の中間値又は平均値を算出するものであるときには、無線LAN測位装置によって得た移動体の現在の時刻における測位結果XL(t)が、中間値又は平均値として算出される。
【0154】
あるいは、あらかじめ定められているところにより、コンピュータプログラムの指示が、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果XL(t)及び直前の一つの時刻t−1における測位結果XL(t−1)の中間値又は平均値を算出するものであるときには、{XL(t)+XL(t−1)}/2が、中間値又は平均値として算出される。
【0155】
もしくは、あらかじめ定められているところにより、コンピュータプログラムの指示が、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果XL(t)及び直前の複数の時刻(例えば、時刻t−1と、時刻t−2)における測位結果XL(t−1)、XL(t−2)の中間値又は平均値を算出するものであるときには、平均値として{XL(t)+XL(t−1)+XL(t−2)}/3が、あるいは中間値として以下に示す値が算出される。
【0156】
なお、前記において、XL(t)=(xL(t),yL(t))、XL(t−1)=(xL(t−1),yL(t−1))、XL(t−2)=(xL(t−2),yL(t−2))の中間値は、これらのベクトルのx成分の中間値xmとy成分の中間値ymを成分とするベクトル(xm,ym)である。x成分の中間値xmは、xL(t)、xL(t−1)、xL(t−2)の最大値でも最小値でもない値であり、y成分の中間値ymは、yL(t)、yL(t−1)、yL(t−2)の最大値でも最小値でもない値である。
【0157】
次に、算出処理部1304によって行われる、算出処理部1301によって算出された、GPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、算出処理部1302によって算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、算出処理部1303によって算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとして、GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値とを平均する処理(ステップ14005)は、具体的には、以下の(数15)により行われる。
【数15】
【0158】
こうして算出処理部1304によって行われた計算処理の結果が、現在における移動体の測位結果として出力(ステップ14006)される。
【実施例8】
【0159】
図15、図16を用いて、本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム1を説明する。このシステムは請求項8記載の発明に対応している。
【0160】
図1〜図14を用いて説明した本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム及び、これによる連続的測位方法と共通する部分には共通する符号を用いて、その説明を省略する。
【0161】
ここでは、DOPとして、平面位置の精度の指標であるHDOPを使用し、無線LAN測位の有効範囲は座標軸に平行な矩形とする例を示す。
【0162】
この連続的測位システム1は、実施例7のシステムと同じく、外部と有線又は無線での情報交信を行うインターフェース部からなる情報取得部で取得した、GPS受信機によって得た現在の時刻における移動体の測位結果におけるHDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する算出処理部1301と、無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、無線LAN測位装置によって得た移動体の現在及び直前の一つの時刻における測位結果、若しくは、無線LAN測位装置によって得た移動体の現在及び直前の複数の時刻における測位結果を用いて、無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する算出処理部1302とを備えている。
【0163】
また、直前の移動体の測位結果を現在の測位結果として利用する際の精度を、直前の移動体の測位結果の精度と、予め定められている移動体の移動速度に基づいて算出する算出処理部1501を備えている。
【0164】
更に、実施例7のシステムと同じく、無線LAN測位装置によって得た移動体の現在の時刻tにおける測位結果、又は、現在及び直前の一つの時刻t−1における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値は平均値を算出する算出処理部1303を備えている。
【0165】
更に、前記算出処理部1301によって算出された、GPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、前記算出処理部1302によって算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出処理部1303によって算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとし、直前の移動体の測位結果を現在の測位結果として利用する際の精度の2乗の逆数を、直前の移動体の測位結果の重みとして、GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値と、直前の移動体の測位結果とを平均する算出処理部1502を備えている。
【0166】
更に、次の時点の測位結果情報を生成するために、(数16)により、現在の測位結果の精度を算出する算出処理部1503を備えている。
【数16】
【0167】
本発明の移動体の連続的測位システム1がGPS受信機によって得た現在の時刻における移動体の測位結果を情報取得部で取得する(ステップ16001)。
【0168】
こうして取得したGPS受信機によって得た現在における移動体の測位結果を記憶部に記憶しておくことに関しては実施例1と同様である。
【0169】
また、このシステム1が、無線LAN測位装置によって得た移動体の現在の時刻における移動体の測位結果を情報取得部で取得して、それが記憶部に記憶されていくことに関しても実施例1と同様である。
【0170】
ここでは、現在の時刻をt、GPS受信機によって得た現在の時刻における移動体の測位結果をXG(t)(座標はUTM座標系)と表示する。
【0171】
GPS受信機よって得た現在の時刻における移動体の測位結果におけるHDOP値をD(t)とする。
【0172】
現在の時刻をtとし、算出処理部1301は、D(t)を用いて、実施例7で説明したように、GPS受信機よって得た現在の時刻における移動体の測位結果の精度EG(t)を計算する(ステップ16002)。
【0173】
算出処理部1302によって行われる、無線LAN測位装置によって得た移動体の現在の時刻における測位結果の精度算出(ステップ16003)も、実施例7で説明したように行われる。
【0174】
算出処理部1501によって行われる、直前の移動体の測位結果XR(t−1)を現在の測位結果として利用する際の精度ES(t)を、直前の移動体の測位結果XR(t−1)の精度ER(t−1)と、予め定められている移動体の移動速度vに基づいて算出する処理(ステップ16004)は、ES(t)=ER(t−1)+vによって行われる。
【0175】
算出処理部1303が、無線LAN測位結果の中間値は平均値を算出する処理(ステップ16005)は、実施例7で説明したように行われる。
【0176】
次に、算出処理部1502によって行われる、算出処理部1301によって算出された、GPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、算出処理部1302によって算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、算出処理部1303によって算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとし、直前の移動体の測位結果を現在の測位結果として利用する際の精度ES(t)の2乗の逆数を、直前の移動体の測位結果の重みとして、GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値と、直前の移動体の測位結果とを平均する処理(ステップ16006)は、具体的には、以下の(数17)により行われる。
【数17】
【0177】
こうして算出処理部1502によって行われた計算処理の結果が、現在における移動体の測位結果として出力される(ステップ16007)。
【0178】
更に、算出処理部1503によって、前記の(数16)により、現在の測位結果の精度が算出され(ステップ16008)、これが、次の時点の測位結果情報を生成するために利用される。
【実施例9】
【0179】
図17、図18、図19に示すこの実施例のシステムは、請求項9に係る発明に対応している。
【0180】
図1〜図16を用いて説明した本発明の無線LAN測位とGPS測位とを併用した移動体の連続的測位システム及び、これによる連続的測位方法と共通する部分には共通する符号を用いて、その説明を省略する。
【0181】
図17、図18、図19に示すこの実施例のシステムは、実施例7、8のシステムにおいて、現在における移動体の測位結果として生成された移動体の測位結果情報における平均遅延時間を算出する算出処理部1701と、現在における移動体の測位結果として生成された移動体の測位結果情報に、高感度GPS受信機によって得た現在と当該平均遅延時間だけ前の時点における移動体の測位結果の差を加算する算出処理部1702と、を更に備えている。
【0182】
この実施例のシステムでは、GPS受信機として高感度GPS受信機以外のGPS受信機、例えばDGPS受信機が使用される例で説明する。
【0183】
ここで、算出処理部1701が行う現在における移動体の測位結果として生成された移動体の測位結果情報における平均遅延時間を算出する処理(ステップ18006)(図18)、(ステップ19007)(図19)は、具体的には、次の(数18)のように行われる。
【数18】
【0184】
また、算出処理部1702が行う現在における移動体の測位結果として生成された移動体の測位結果情報に、高感度GPS受信機によって得た現在と当該平均遅延時間だけ前の時点における移動体の測位結果の差を加算する処理(ステップ18007)(図18)、(ステップ19008)(図19)は、具体的には、次の(数19)のように行われる。
【数19】
【0185】
なお、ここでは、1秒ごとに高感度GPSの測位結果が得られるとして、平均遅延時間Δt(t)に最も近い整数Δt’(t)を求め、現在の時刻からΔt’(t)秒前の高感度GPS受信機の測位結果を用いた例を示したが、1秒ごとに得られる高感度GPSの測位結果を内挿し、時刻t−Δt(t)の高感度GPS受信機の測位結果を推定し、上記の(数19)におけるXH(t−Δt’(t))の代わりに使用することもできる。
【0186】
こうして算出処理部1702によって行われた計算処理の結果XR’(t)が、現在における移動体の測位結果として出力される(ステップ18008)(図18)、(ステップ19009)(図19)。
【0187】
以上、添付図面を参照して本発明の好ましい実施形態を説明したが、本発明はかかる実施形態に限定されるものではなく、特許請求の範囲の記載から把握される技術的範囲において種々の形態に変更可能である。
【図面の簡単な説明】
【0188】
【図1】無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図2】図1図示の連続測位システムを利用した本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図3】無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図4】図3図示の連続測位システムを利用した本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図5】無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図6】図5図示の連続測位システムを利用した本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図7】無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図8】図7図示の連続測位システムを利用した本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図9】無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図10】図9図示の連続測位システムを利用した本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図11】無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図12】図11図示の連続測位システムを利用した本発明の参考例とする無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図13】請求項1記載の本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図14】図13図示の連続測位システムを利用した請求項1記載の本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図15】請求項2記載の本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図16】図15図示の連続測位システムを利用した請求項2記載の本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図17】請求項3記載の本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位方法が実施される本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位システムのシステム構成概要の一例を説明する図。
【図18】図17図示の連続測位システムを利用した請求項3記載の本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位方法の一例を説明するフロー図。
【図19】図17図示の連続測位システムを利用した請求項3記載の本発明の無線LAN測位とGPS測位とを併用した移動体の連続測位方法の他の一例を説明するフロー図。
【符号の説明】
【0189】
1 無線LAN測位とGPS測位とを併用した移動体の連続的測位システム
101 第一の判定処理部
102 第一の測位結果情報生成処理部
103 第二の判定処理部
104 第三の判定処理部
105 無線LAN測位結果平均値算出手段
106 第二の測位結果情報生成処理部
107 第三の測位結果情報生成処理部
901 判定処理部
902 第六の測位結果情報生成処理部
108 第一の加算処理部
109 第四の測位結果情報生成処理部
1301 算出処理部
1302 算出処理部
1303 算出処理部
1304 算出処理部
1501 算出処理部
1502 算出処理部
1503 算出処理部
1701 算出処理部
1702 算出処理部
【特許請求の範囲】
【請求項1】
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出するステップと、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出するステップと、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出するステップと、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成するステップ
を備えた無線LAN測位とGPS測位とを併用した移動体の連続的測位方法。
【請求項2】
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出するステップと、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出するステップと、
直前の移動体の測位結果を現在の測位結果として利用する際の精度を、直前の移動体の測位結果の精度と、予め定められている移動体の移動速度に基づいて算出するステップと、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出するステップと、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとし、
直前の移動体の測位結果を現在の測位結果として利用する際の精度の2乗の逆数を、直前の移動体の測位結果の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値と、直前の移動体の測位結果とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成するステップと、
次の時点の測位結果情報を生成するために、(数1)により、現在の測位結果の精度を算出するステップと
を備えた無線LAN測位とGPS測位とを併用した移動体の連続的測位方法。
【数1】
【請求項3】
現在における移動体の測位結果として生成された移動体の測位結果情報における平均遅延時間を算出し、現在における移動体の測位結果として生成された移動体の測位結果情報に、屋外においては前記GPS受信機と同程度の測位を行うことができると共に、前記GPS受信機が利用できない屋内においても測位が可能な方式による高感度GPS受信機によって得た現在と当該平均遅延時間だけ前の時点における移動体の測位結果の差を加算し、これを現在における移動体の測位結果として移動体の測位結果情報を生成するステップを更に含むことを特徴とする請求項1又は2記載の無線LAN測位とGPS測位とを併用した移動体の連続的測位方法。
【請求項4】
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する第一の算出手段と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する第二の算出手段と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する第三の算出手段と、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成する第十三の移動体の測位結果情報生成手段
を備えた無線LAN測位とGPS測位とを併用した移動体の連続的測位装置。
【請求項5】
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する第十四の算出手段と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する第十五の算出手段と、
直前の移動体の測位結果を現在の測位結果として利用する際の精度を、直前の移動体の測位結果の精度と、予め定められている移動体の移動速度に基づいて算出する第六の算出手段と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する第七の算出手段と、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとし、
直前の移動体の測位結果を現在の測位結果として利用する際の精度の2乗の逆数を、直前の移動体の測位結果の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値と、直前の移動体の測位結果とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成する第十四の移動体の測位結果情報生成手段と、
次の時点の測位結果情報を生成するために、(数2)により、現在の測位結果の精度を算出する第八の算出手段と
を備えた無線LAN測位とGPS測位とを併用した移動体の連続的測位装置。
【数2】
【請求項6】
現在における移動体の測位結果として生成された移動体の測位結果情報における平均遅延時間を算出し、現在における移動体の測位結果として生成された移動体の測位結果情報に、屋外においては前記GPS受信機と同程度の測位を行うことができると共に、前記GPS受信機が利用できない屋内においても測位が可能な方式による高感度GPS受信機によって得た現在と当該平均遅延時間だけ前の時点における移動体の測位結果の差を加算し、これを現在における移動体の測位結果として移動体の測位結果情報を生成する第十五の移動体の測位結果情報生成手段を更に含むことを特徴とする請求項4又は5記載の無線LAN測位とGPS測位とを併用した移動体の連続的測位装置。
【請求項7】
コンピュータに、
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する第一の算出機能と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する第二の算出機能と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する第三の算出機能と、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成する第十三の移動体の測位結果情報生成機能と
を実現させる無線LAN測位とGPS測位とを併用した移動体の連続的測位プログラム。
【請求項8】
コンピュータに、
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する第四の算出機能と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する第五の算出機能と、
直前の移動体の測位結果を現在の測位結果として利用する際の精度を、直前の移動体の測位結果の精度と、予め定められている移動体の移動速度に基づいて算出する第六の算出機能と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する第七の算出機能と、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとし、
直前の移動体の測位結果を現在の測位結果として利用する際の精度の2乗の逆数を、直前の移動体の測位結果の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値と、直前の移動体の測位結果とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成する第十四の移動体の測位結果情報生成機能と、
次の時点の測位結果情報を生成するために、(数3)により、現在の測位結果の精度を算出する第八の算出機能と
を実現させる無線LAN測位とGPS測位とを併用した移動体の連続的測位プログラム。
【数3】
【請求項9】
現在における移動体の測位結果として生成された移動体の測位結果情報における平均遅延時間を算出し、現在における移動体の測位結果として生成された移動体の測位結果情報に、屋外においては前記GPS受信機と同程度の測位を行うことができると共に、前記GPS受信機が利用できない屋内においても測位が可能な方式による高感度GPS受信機によって得た現在と当該平均遅延時間だけ前の時点における移動体の測位結果の差を加算し、これを現在における移動体の測位結果として移動体の測位結果情報を生成する第十五の移動体の測位結果情報生成機能を更にコンピュータに実現させることを特徴とする請求項7又は8記載の無線LAN測位とGPS測位とを併用した移動体の連続的測位プログラム。
【請求項1】
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出するステップと、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出するステップと、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出するステップと、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成するステップ
を備えた無線LAN測位とGPS測位とを併用した移動体の連続的測位方法。
【請求項2】
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出するステップと、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出するステップと、
直前の移動体の測位結果を現在の測位結果として利用する際の精度を、直前の移動体の測位結果の精度と、予め定められている移動体の移動速度に基づいて算出するステップと、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出するステップと、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとし、
直前の移動体の測位結果を現在の測位結果として利用する際の精度の2乗の逆数を、直前の移動体の測位結果の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値と、直前の移動体の測位結果とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成するステップと、
次の時点の測位結果情報を生成するために、(数1)により、現在の測位結果の精度を算出するステップと
を備えた無線LAN測位とGPS測位とを併用した移動体の連続的測位方法。
【数1】
【請求項3】
現在における移動体の測位結果として生成された移動体の測位結果情報における平均遅延時間を算出し、現在における移動体の測位結果として生成された移動体の測位結果情報に、屋外においては前記GPS受信機と同程度の測位を行うことができると共に、前記GPS受信機が利用できない屋内においても測位が可能な方式による高感度GPS受信機によって得た現在と当該平均遅延時間だけ前の時点における移動体の測位結果の差を加算し、これを現在における移動体の測位結果として移動体の測位結果情報を生成するステップを更に含むことを特徴とする請求項1又は2記載の無線LAN測位とGPS測位とを併用した移動体の連続的測位方法。
【請求項4】
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する第一の算出手段と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する第二の算出手段と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する第三の算出手段と、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成する第十三の移動体の測位結果情報生成手段
を備えた無線LAN測位とGPS測位とを併用した移動体の連続的測位装置。
【請求項5】
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する第十四の算出手段と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する第十五の算出手段と、
直前の移動体の測位結果を現在の測位結果として利用する際の精度を、直前の移動体の測位結果の精度と、予め定められている移動体の移動速度に基づいて算出する第六の算出手段と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する第七の算出手段と、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとし、
直前の移動体の測位結果を現在の測位結果として利用する際の精度の2乗の逆数を、直前の移動体の測位結果の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値と、直前の移動体の測位結果とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成する第十四の移動体の測位結果情報生成手段と、
次の時点の測位結果情報を生成するために、(数2)により、現在の測位結果の精度を算出する第八の算出手段と
を備えた無線LAN測位とGPS測位とを併用した移動体の連続的測位装置。
【数2】
【請求項6】
現在における移動体の測位結果として生成された移動体の測位結果情報における平均遅延時間を算出し、現在における移動体の測位結果として生成された移動体の測位結果情報に、屋外においては前記GPS受信機と同程度の測位を行うことができると共に、前記GPS受信機が利用できない屋内においても測位が可能な方式による高感度GPS受信機によって得た現在と当該平均遅延時間だけ前の時点における移動体の測位結果の差を加算し、これを現在における移動体の測位結果として移動体の測位結果情報を生成する第十五の移動体の測位結果情報生成手段を更に含むことを特徴とする請求項4又は5記載の無線LAN測位とGPS測位とを併用した移動体の連続的測位装置。
【請求項7】
コンピュータに、
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する第一の算出機能と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する第二の算出機能と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する第三の算出機能と、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成する第十三の移動体の測位結果情報生成機能と
を実現させる無線LAN測位とGPS測位とを併用した移動体の連続的測位プログラム。
【請求項8】
コンピュータに、
GPS受信機によって得た現在の時刻における移動体の測位結果におけるDOP値を用いて、当該GPS受信機によって得た現在の時刻における移動体の測位結果の精度を算出する第四の算出機能と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果を用いて、当該無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度を算出する第五の算出機能と、
直前の移動体の測位結果を現在の測位結果として利用する際の精度を、直前の移動体の測位結果の精度と、予め定められている移動体の移動速度に基づいて算出する第六の算出機能と、
無線LAN測位装置によって得た移動体の現在の時刻における測位結果、又は、現在及び直前の一つの時刻における測位結果、若しくは、現在及び直前の複数の時刻における測位結果の中間値又は平均値を算出する第七の算出機能と、
前記算出されたGPS受信機によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、GPS受信機によって得た現在の時刻における移動体の測位結果の重みとし、
前記算出された無線LAN測位装置によって得た現在の時刻における移動体の測位結果の精度の2乗の逆数を、前記算出された無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値の重みとし、
直前の移動体の測位結果を現在の測位結果として利用する際の精度の2乗の逆数を、直前の移動体の測位結果の重みとして、
GPS受信機によって得た現在の時刻における移動体の測位結果と、無線LAN測位装置によって得た移動体の測位結果の中間値又は平均値と、直前の移動体の測位結果とを平均し、当該平均を現在における移動体の測位結果として移動体の測位結果情報を生成する第十四の移動体の測位結果情報生成機能と、
次の時点の測位結果情報を生成するために、(数3)により、現在の測位結果の精度を算出する第八の算出機能と
を実現させる無線LAN測位とGPS測位とを併用した移動体の連続的測位プログラム。
【数3】
【請求項9】
現在における移動体の測位結果として生成された移動体の測位結果情報における平均遅延時間を算出し、現在における移動体の測位結果として生成された移動体の測位結果情報に、屋外においては前記GPS受信機と同程度の測位を行うことができると共に、前記GPS受信機が利用できない屋内においても測位が可能な方式による高感度GPS受信機によって得た現在と当該平均遅延時間だけ前の時点における移動体の測位結果の差を加算し、これを現在における移動体の測位結果として移動体の測位結果情報を生成する第十五の移動体の測位結果情報生成機能を更にコンピュータに実現させることを特徴とする請求項7又は8記載の無線LAN測位とGPS測位とを併用した移動体の連続的測位プログラム。
【図1】

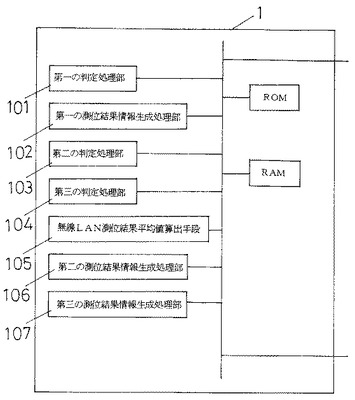
【図2】
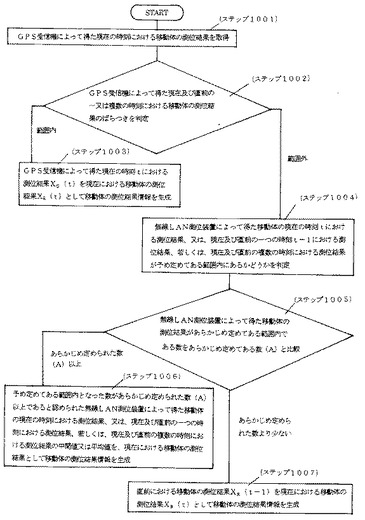
【図3】
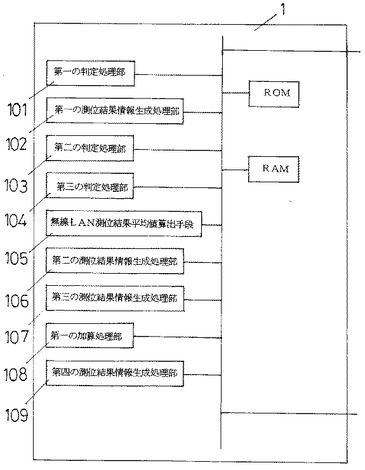
【図4】
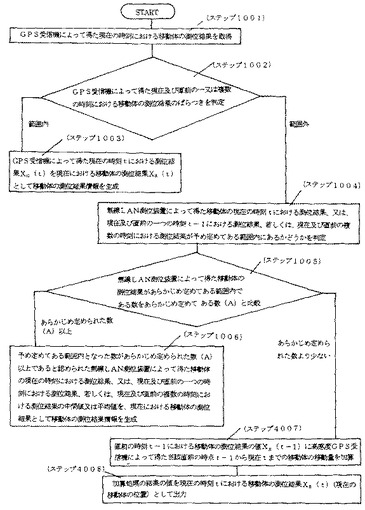
【図5】
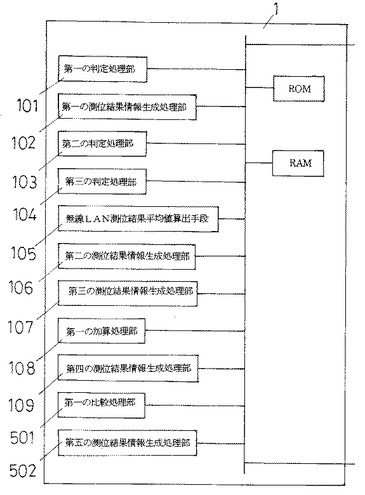
【図6】
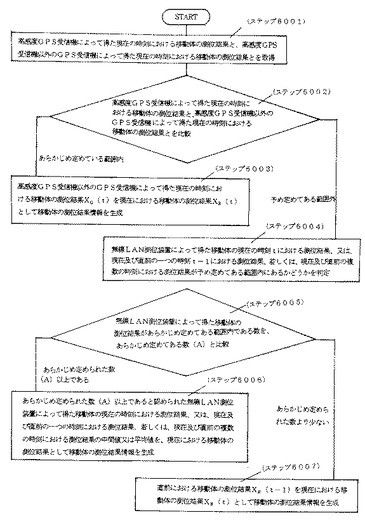
【図7】
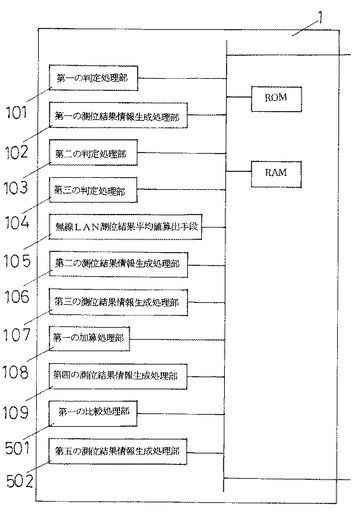
【図8】
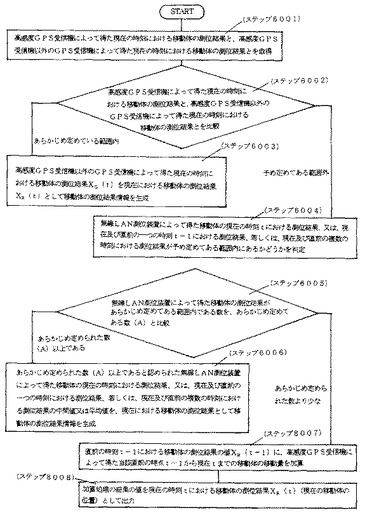
【図9】
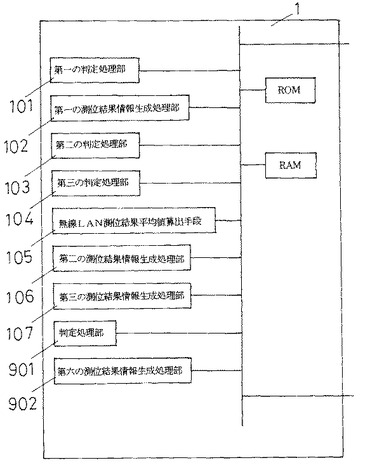
【図10】
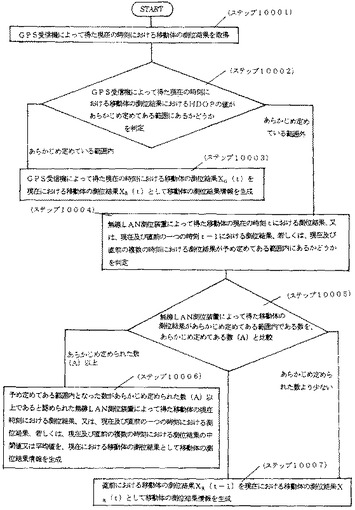
【図11】
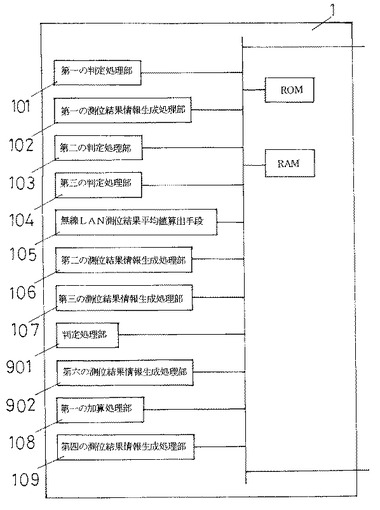
【図12】
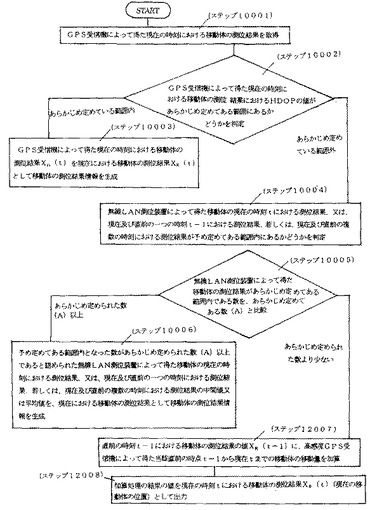
【図13】
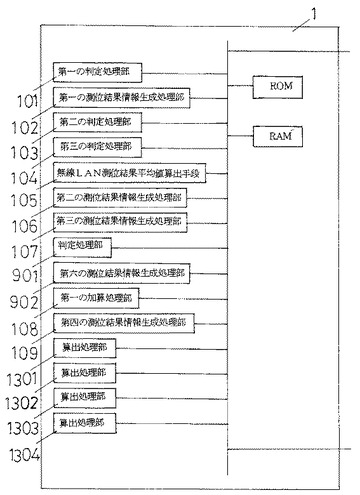
【図14】
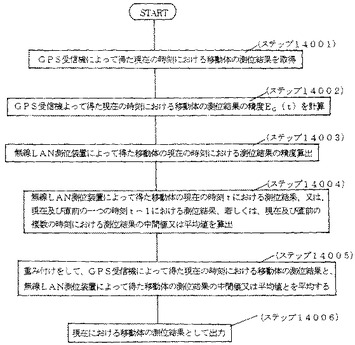
【図15】
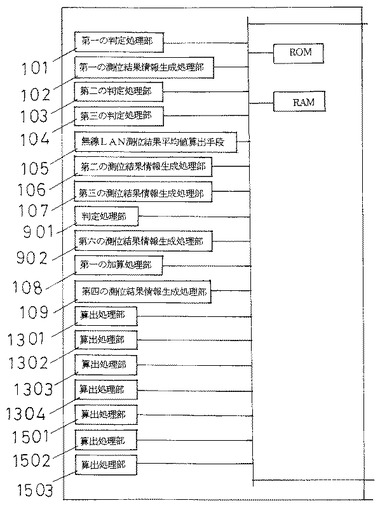
【図16】
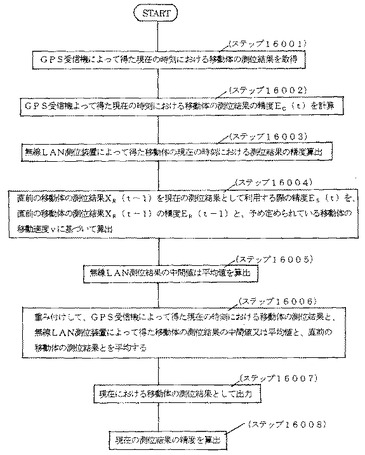
【図17】
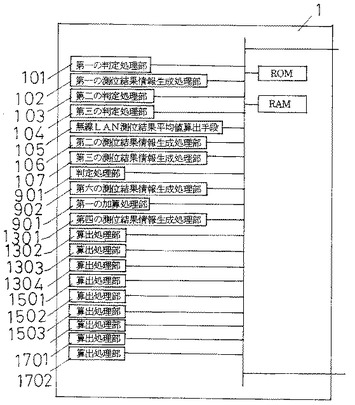
【図18】
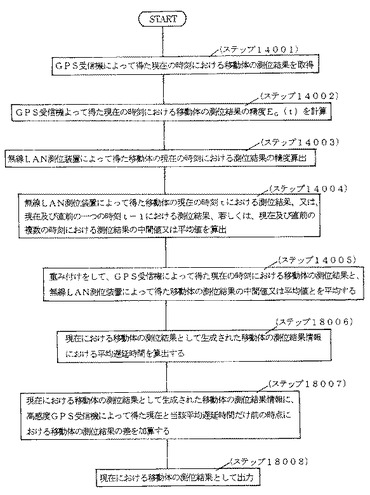
【図19】
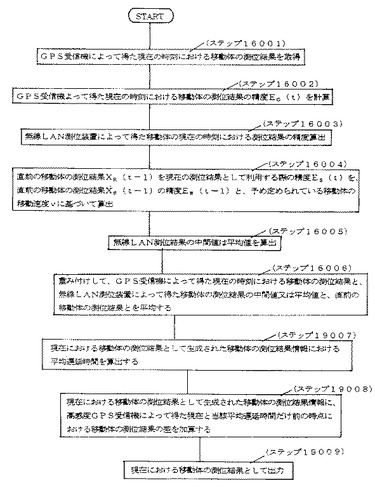
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2009−31298(P2009−31298A)
【公開日】平成21年2月12日(2009.2.12)
【国際特許分類】
【出願番号】特願2008−223345(P2008−223345)
【出願日】平成20年9月1日(2008.9.1)
【分割の表示】特願2005−295925(P2005−295925)の分割
【原出願日】平成17年10月11日(2005.10.11)
【出願人】(301042480)国土交通省国土地理院長 (12)
【Fターム(参考)】
【公開日】平成21年2月12日(2009.2.12)
【国際特許分類】
【出願日】平成20年9月1日(2008.9.1)
【分割の表示】特願2005−295925(P2005−295925)の分割
【原出願日】平成17年10月11日(2005.10.11)
【出願人】(301042480)国土交通省国土地理院長 (12)
【Fターム(参考)】
[ Back to top ]