
焦点特性とコヒーレンス・ゲートを制御するために動的フィードバックを用いた、光干渉トモグラフィにおける写像性と感度を改善するための方法及び装置
【課題】特に光干渉トモグラフィにより、試料表面から反射され、基準光ビームと比較される低干渉性光ビームを用いて、光学的な撮像を行うための方法を提供する。
【解決手段】この方法では、参照点を基準にした生体組織試料の表面位置及び必要な遅延走査範囲を検出するために実時間動的光学的フィードバックを用いる。この遅延を、電圧調整可能なガルバノメータによって駆動されるミラーを傾斜/回転することで生み出す。この方法を実現するための撮像プローブ装置を構成した。このプローブは、生体組織表面を見つけるまで、最初に一本の線に沿って走査を行う。生体組織表面は、信号無しの状態からより大きな信号への鋭い推移を見れば特定できる。次に、該プローブが次の線を走査するときには、前回の走査に応じて波形を調整する。最適の走査範囲を決めるためのアルゴリズムを開示した。
【解決手段】この方法では、参照点を基準にした生体組織試料の表面位置及び必要な遅延走査範囲を検出するために実時間動的光学的フィードバックを用いる。この遅延を、電圧調整可能なガルバノメータによって駆動されるミラーを傾斜/回転することで生み出す。この方法を実現するための撮像プローブ装置を構成した。このプローブは、生体組織表面を見つけるまで、最初に一本の線に沿って走査を行う。生体組織表面は、信号無しの状態からより大きな信号への鋭い推移を見れば特定できる。次に、該プローブが次の線を走査するときには、前回の走査に応じて波形を調整する。最適の走査範囲を決めるためのアルゴリズムを開示した。
【発明の詳細な説明】
【技術分野】
【0001】
〔関連出願の相互参照〕
本出願は、2001年4月30日に出願され、本出願の譲受人に共に譲渡された仮出願第60/287,477号に対する優先権を主張する。先の出願の内容は、本明細書に包括的に組み込まれている。
【0002】
本発明は、試料表面から反射され、基準光ビームと比較される低干渉性光ビームを用いた光学的イメージング(光学的な撮像)のための方法であって、参照点を基準にした生体組織試料の表面位置と必要な遅延走査範囲(delay scan range)を検出するために実時間動的光学的フィードバックを用いる方法に関する。また、本発明は、この方法を実施するための撮像プローブ装置に関する。
【背景技術】
【0003】
光干渉トモグラフィ(OCT ; optical coherence tomography)(光干渉断層計)は、一つのイメージング技術であり、この技術は、標的の生体組織領域に入射してから生体組織内で散乱により反射されて検出器へと戻る検出光ビームと、基準光ビームとの間の干渉を測定するものである。血管をOCT撮像する際には、撮像プローブを血管内に挿入し、血管壁を予め設定された一連の弧からなるセグメントで360度周方向走査し、これにより、一つの断層イメージを得る。このプローブ先端部は、軸線周りに生体組織断面を周方向走査するように、そして縦方向に血管を区分した長さを走査するように回され、こうして、2次元にマップ化された生体組織構造の情報が得られるようになっている。管腔内のプローブの軸線方向位置は、管腔の軸線方向中心に対して変わらない。しかしながら、壁の表面は、局所的様相や幾何学形状の点で変化することがあり、プローブ先端部と表面との間の距離が変わることになる。従来のOCT撮像は、所定高さからなる概ね矩形の「ウィンドウ(window)」の中に入射光ビームを生成するのに、決められた波形を用いているため、壁の表面高さが変わると、血管壁の所定領域における生体組織データを収集するのに誤差が生じる可能性がある。波形を変調させて、これによりプローブが何処にあって何を見ているかに基づきウィンドウをシフトさせるようなフィードバック機構を設けることが望ましいと考えられる。
【0004】
典型的なOCTシステムの場合、走査する線(scanning line)の長さとその初期位置は、常に一定でありかつ固定されていた。上記問題を克服するための一つのやり方は、ウィンドウをより大きくすることであるが、その際の問題は、同じ時間の間により大きな面積(エリア)に亙って情報を集めるせいで、信号対ノイズ比ならびにそれに伴う感度が悪くなるということにある。
【発明の概要】
【発明が解決しようとする課題】
【0005】
走査の開始位置を異なる場所に調整するために、生体組織表面を特定することを使うことが望ましかろう。表面を特定すれば、サンプリングアーム内での焦点位置を調整するのにも利用できよう。走査範囲を調整するのに生体組織内での光の減衰を特定することを使えれば、さらに望ましかろう。この減衰の特定は、最適の焦点深度ないし共焦点パラメータを決定するのにも用いることができよう。
【課題を解決するための手段】
【0006】
本発明は、試料表面から反射されて基準光ビームと比較される低干渉性光ビームを用いる光学的イメージングを提供する。その際、参照点を基準にした生体組織試料の表面位置及び必要な遅延走査範囲(delay scan range)を見つけるために実時間動的光学的フィードバックが用いられる。また、本発明は、この方法を実施するための撮像プローブ装置に関する。このプローブは、生体組織表面を見つけるまで、最初に一本の線に沿って走査を行う。生体組織表面は、信号無しの状態からより大きな信号への鋭い推移として特定することができる。次に、該プローブが次の線を走査するときには、前回の走査に応じて波形を調整する。
【0007】
本発明は、以下に記載されるような時間遅延走査ユニットを提供する。また、本発明は、光学的走査システムのための焦点調整機構をも提供する。また、本発明は、生体組織表面に対するプローブの距離(これは表面トポグラフィーとプローブ長さの設計/構成により変わる)をより正確に特定するための時間遅延走査の方法を提供する。
【0008】
本発明では、遅延線を作り出すための幾つかの新しい機構の一つとして、ロッキングミラー(rocking mirror)が設けられる。ロッキングミラーは、コンピュータならびに走査プローブと同期させたまま、遥かに素早くかつより正確に動かすことができる。本発明は、位置を特定するための一つのアルゴリズムを提供し、これにより、プローブ先端部から生体組織までの距離に合わせるようにして、ガルバノメータのDCオフセット角に対する変化が決定されるようになっている。加えて、本発明は、有用/有効な画像情報だけが含まれるようにコヒーレンス・ゲート走査深さ(coherence gate scan depth)を調整するため、ガルバノメータのAC角を変更するための動的なアクティブ・フィードバックを提供する。また、最終的に、本発明は、動的なアクティブ・フィードバック用いて、カテーテルの集光特性(焦点距離、スポットサイズ、及び共焦点パラメータ)を調整することが可能である。
【0009】
以下に、本発明の詳細な説明において、本発明の上記ならびにその他の対象、特徴、及び長所について、特許請求の範囲ならびに図面と照らし合わせて論じかつ明らかにする。
【図面の簡単な説明】
【0010】
【図1】従来のDCベースライン・オフセットのセラダイン波形のグラフを表す図である。
【図2A】1回の外形輪郭走査波形の血管壁オフセット外形輪郭形状のグラフを表す図である。
【図2B】ΔLRの通常の(一定オフセット)走査波を示す図である。
【図2C】図2Bのセラダイン波形上に図2Aの外形ΔLを重ね合わせたグラフを表す図である。
【図2D】2つの軸線走査e1及びe2の期間に亙る補正された参照アーム走査を示す図である。
【図3A】走査深さ制御のグラフを表す図である。
【図3B】図3Aの走査範囲と管腔を断面にして表示した図である。
【図3C】実際の走査の断面像を示す図である。
【図4】従来のOCTイメージ・ウィンドウと本発明によるウィンドウを比較して示す図である。
【図5】最初のオフセット及びΔzつまり有効な走査範囲のグラフを表す図である。
【図6】生体組織表面の外形輪郭に対して参照アームによる遅延を適合させるために修正調整されたガルバノメータマップ化波形のグラフを表す図である。
【図7A1】参照アームの連続した遅延走査線を示す図である。
【図7A2】参照アームの連続した遅延走査線を示す図である。
【図7B1】参照アームの連続した遅延走査線を示す図である。
【図7B2】参照アームの連続した遅延走査線を示す図である。
【図7C1】参照アームの連続した遅延走査線を示す図である。
【図7C2】参照アームの連続した遅延走査線を示す図である。
【図8A】ΔLに対するΔxを示す図である。
【図8B】LRに対する時間を示す図である。
【図9】本発明の一実施形態によるアルゴリズムの流れ図である。
【図10】有り得る生体組織表面境界と信号閾値強度の当たりとして考えられる4つの場合を示す図である。
【図11】走査線を示す図である。
【図12】コンピュータメモリへのガルバノメータ波形の出力の蓄積による配列を示す図である。
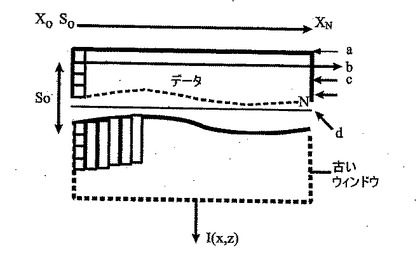
【図13A】古いウィンドウを示す図である。
【図13B】図9のブロック28から得られる新たなウィンドウを示す図である。
【図14】オートフォーカス・アルゴリズムを供給する本発明の他の実施形態に関する流れ図を示す。
【図15】共焦点顕微鏡解析の間の共焦点パラメータ調整に関するアルゴリズムを示す図である。
【図16】本発明の一実施形態による装置の概略図である。
【図17】遅延線の概略図である。
【図18】直線変換装置85上に往復するように取り付けられたミラー84によって遅延線が内部に作り出される他のシステムを示す概略図である。
【図19】コンピュータ25によってドラム65が内部で制御されるさらに他のシステムを示す概略図である。
【図20】音響光学変調器を用いる他の構成を示す図である。
【図21】本発明によるカテーテルを示す図である。
【図22】本発明の一実施形態によるカテーテルの部分拡大図である。
【図22A】ファイバ先端に対してレンズを動かす様子を示す図22の差し込み部分の図である。
【図23】レンズ−ファイバ距離オフセットを制御するための風船ないし拡張チャンバを組み込んだ構成のカテーテルの部分拡大図である。
【図24】焦点を変えるためのシステムを示す概略図である。
【図25】ファイバ−レンズ離隔距離が固定され、レンズと反射プリズムの間の離隔距離が変更される他の実施形態のシステムの概略図である。
【図26】複数の素子からなる複合レンズとファイバとの間にギャップを有するシステムの概略図である。
【発明を実施するための形態】
【0011】
本発明の様々な特徴ならびに長所は、図面から明らかになろう。なお、図の中で同様の参照符号は、同じかもしくは類似の部材を示している。
【0012】
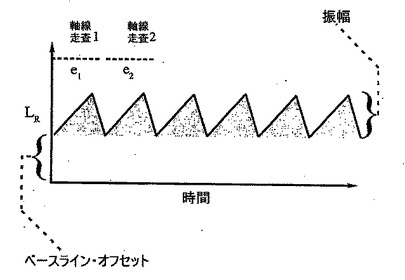
図1は、典型的なDCベースラインオフセットのセラダイン波形(seradyne waveform)のグラフであり、ここで、LRは参照アームの光学的遅延距離オフセットであり、tは時間(例えば0〜20kHz)である。一つの走査撮像長さは「e1」として示されており、2番目は「e2」として示されている。ピーク・ツー・ピーク振幅は、AC成分と称される。
【0013】
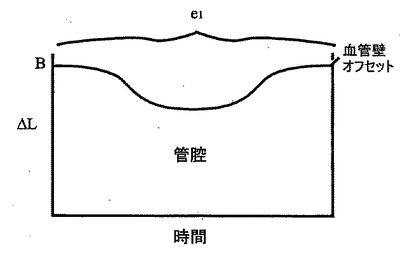
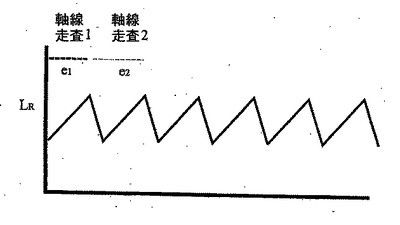
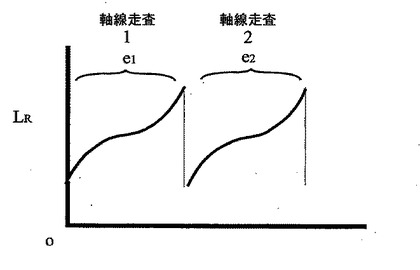
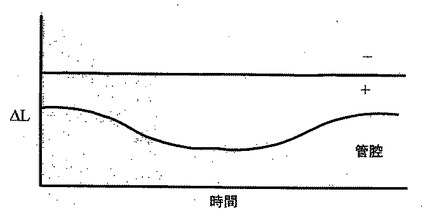
図2Aは、1回の外形輪郭走査波形による血管壁オフセット輪郭のグラフを示す。ここで、x軸は時間、y軸はΔLである。図2Bは、通常の(一定オフセットの)走査波ΔLRを示し、この場合、走査波は、セラダイン波とされ、かつ各周期が1回の走査撮像(走査撮像長さe1を有する太線の軸線走査1、及び走査撮像長さe2を有する軸線走査2として示されている)である。所定の外形輪郭には、範囲が250〜500程度のセラダイン走査が存在し得る。図2Aは、1回の走査の期間に対するオフセット補正を示している。光遅延(ΔL)は、
ΔL=ΔLS−ΔLR
として計算され、このときΔLSは、生体組織表面までのサンプリングアームの距離、ΔLRは、参照アームの光経路である。
【0014】
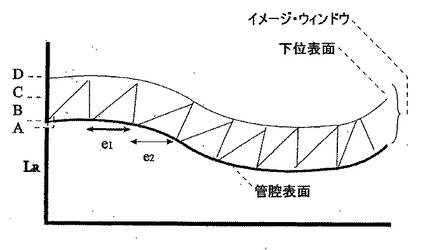
図2Cは、図2Bのセラダイン波形上に図2Aの外形輪郭ΔLを重ね合わせたものを示している。「A」は開始ゲート、「B」は生体組織ないし血管表面、「C」は生体組織内側、「D」は終了ゲート、「e」波形周期である。図2Dは、2回の軸線走査e1ならびにe2の周期に亙る補正された参照アーム走査を示す。信号対ノイズ比のレベルを低減するために小さなイメージ・ウィンドウが望ましい。走査はオフセット「a」(開始ゲート)で開始される。このオフセットは、僅かに血管表面から離れているので、そのため、血管表面が走査の先頭にくる。これは、アルゴリズム(後で詳述する)を決定するための初期走査オフセット(開始測定)を確立するのに有用である。b−aで表される「b」と「a」の間の差は、外部と血管表面の間のデッドスペースである。b−cは、血管表面内側の領域である。図2Cのイメージ・ウィンドウは、d−aで表すことができる。
【0015】
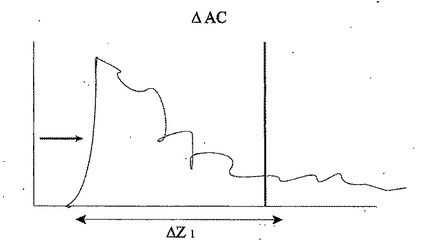
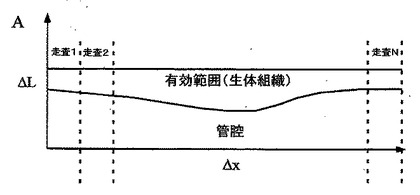
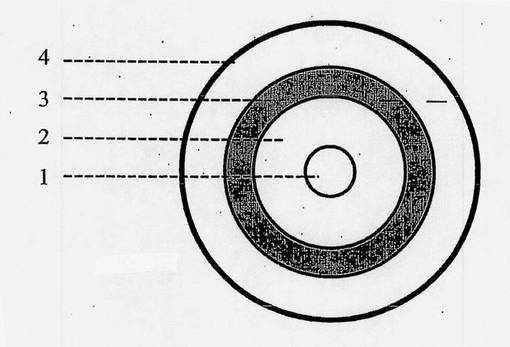
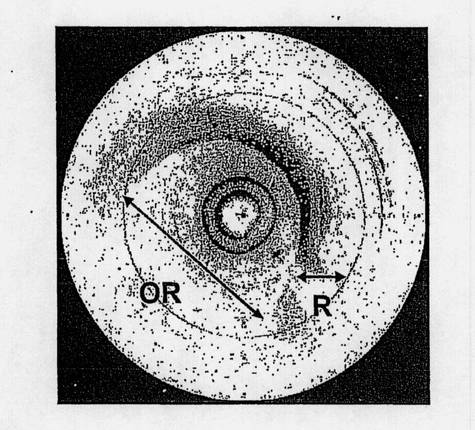
図3Aは、走査深さ制御のグラフである。図3Bは、図3Aの走査範囲および管腔を断面で表示したものである。最も内側の円がカテーテル1、次の円の外面が血管の管腔2、次の円の外面が血管壁3、最大走査範囲は符号4で示されている。円形領域内の「+」は、有効な走査範囲、円内の「−」(マイナス符号)は、有効な走査範囲を超えている。図3Cは、実際の走査の断面のイメージである。
【0016】
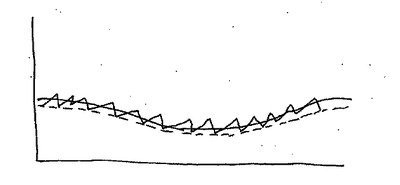
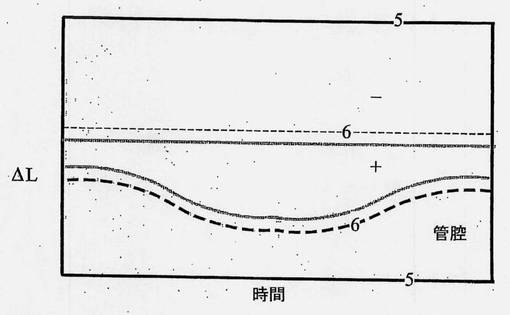
図4は、符号5が付されて四角形で表された従来のOCTイメージ・ウィンドウ(実線による)と、本発明のアルゴリズムを用いて得られるウィンドウ(破線による)(ここで、イメージ・ウィンドウは、符号6が付されている)との比較を示す。より小さなウィンドウ6は、遥かに優れた信号対ノイズ比を有し、そしてそれ故に感度が十分に上がり、その結果イメージ(画像)品質が改善されることになる。
【0017】
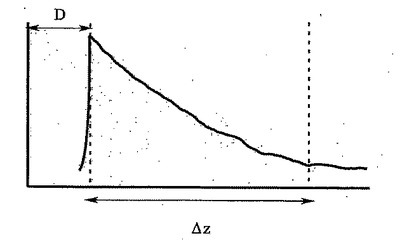
これまでのOCTを用いる場合、走査波形は、一定のAC成分、及び固定されたDCないしはゆっくり変化する成分を有している。本発明を用いる場合、波形のAC成分ならびにDC成分は、アルゴリズムからのフィードバックにより変化する。図5を参照すると、「D」,初期オフセット、ならびにΔz,有効な走査範囲が観測され、次の走査に対して波形をどのように変更するかが決定される。図6は、参照アームの遅延を生体組織表面外形輪郭に合わせるためにマップ化された、修正変更されたガルバノメータの波形のグラフである。
【0018】
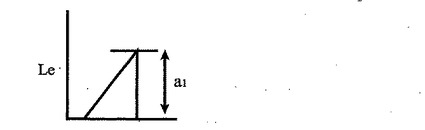
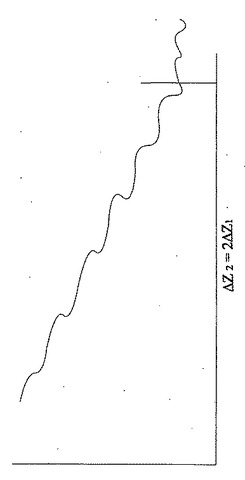
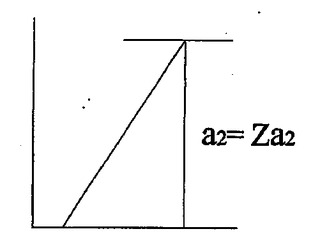
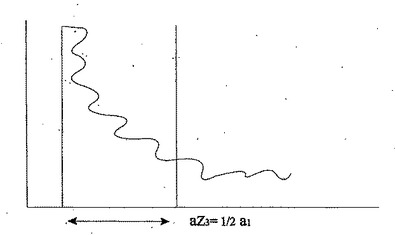
図7A〜図7Cは、次々に続く参照アームの遅延走査線を示している。図7A1および図7A2は、振幅a1及びΔz1を示す。図7B1および図7B2は、振幅a2=2×a1およびΔz2=2×Δz1を示す。図7C1および図7C2は、振幅a3=0.5×a1およびΔz3=0.5×Δz1を示す。幅(Δz)が長くなればなるほど、それだけ一層参照アーム内の遅延も大きくなる。
【0019】
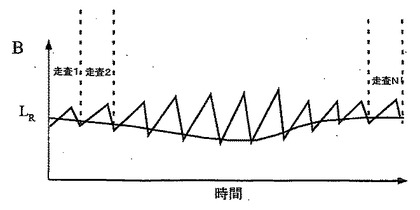
図8Aは、Δx対ΔLを示す。図8Bは、時間対LRを示す。決められた走査範囲が増えると、ガルバノメータの参照アームAC成分もまた増加する。DCオフセットは、図8Bにおけるように、生体組織表面外形輪郭を表す曲線をなぞる。図8Aの走査1、走査2…等々が、図8Bの走査1、走査2上に写っている点に留意されたい。次々に続く走査3,4,…Nは、同じようにして、生体組織表面オフセットおよび最適の走査範囲に調整される。現在の走査線(軸線走査)ないし幾つかの走査線におけるデータを調べることにより、続くN本の走査線に対して、生体組織表面までのオフセットならびに最適のコヒーレンス・ゲートが決定される。このようにして、実時間動的フィードバックが用いられ、不規則な生体組織外形輪郭が最適な感度で撮像できるようになる。
【0020】
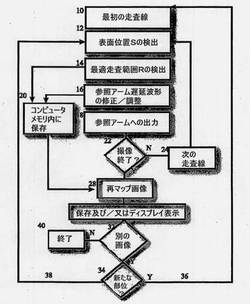
〔方法〕
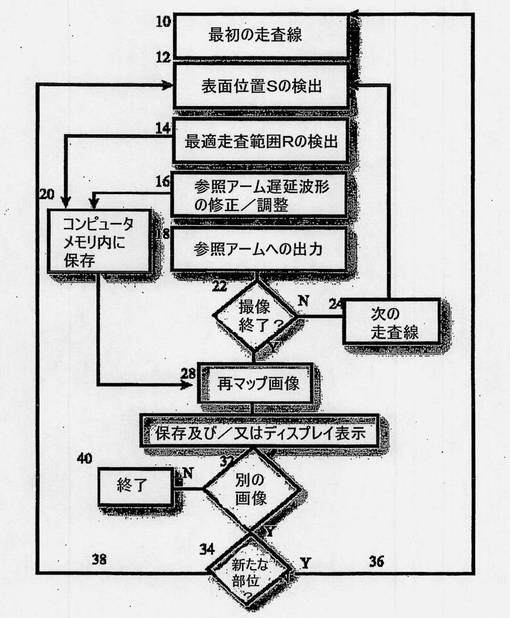
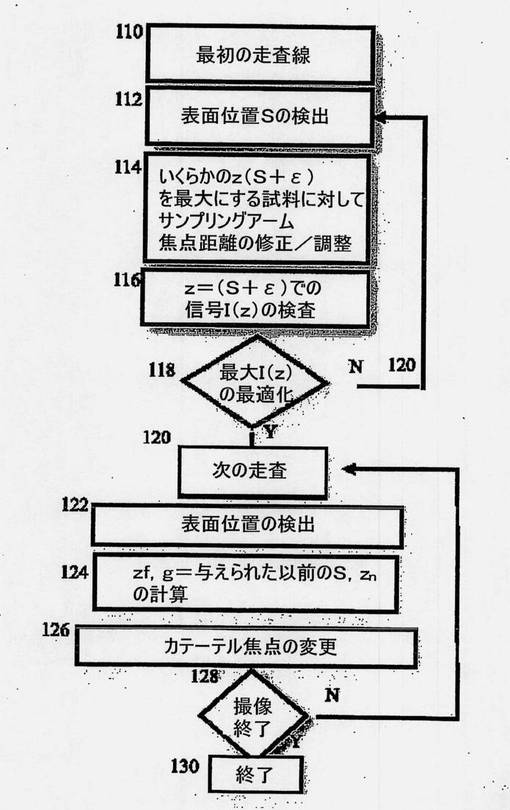
図9は、本発明の一実施形態によるアルゴリズムの流れ図を示す。比較的大きな走査範囲(ブロック14)(例えば、約3〜10mmであるが、他の範囲を適切なものとして用いてもよい)で、ブロック12において生体組織表面「S」を十分に見つけるために、ブロック10において最初の走査線が調べられる。表面を見つけるために、少なくとも3つの方法の一つを用いることができる。第1の方法は、アダプティブ閾値(「T」)を用いることである。第2の方法は、1次の導関数dI(z)/dz=D1を用いる。第3の方法は、ゼロを横切る2次の導関数d2I(z)/dz2=D2を用いる。
【0021】
必要な幾つかの規則A,B及びCがある。第1の方法の場合、規則「A」は、もしI(z1)>TならばS=z1というものである。第2の方法の場合、規則「B」は、もしdI(z2)/dz>TならばS=z2というものである。第3の方法の場合、規則「C」は、もしd2I(z3)/dz2=0ならばS=z3というものである。微分を行う前にノイズを取り除いて、スパイク前処理をあまり行わなくてもよいようにするために、I(z)をフィルタリングしなければならないことに注意されたい。斯かるフィルタ選別は、当業者に周知の多くのあらゆるフィルタ、例えば、限定はしないが、線形ブラー(linear blur)、ガウシアン、ウィンドウ、ローパスフィルタ、重畳(convolution)、モルフォロジー(morphology)、等々を含めたフィルタを使って行うことができる。表面が見つからない場合には、ブロック10を繰り返すが、ただしブロック12における結果に基づいて範囲オフセット(range offset)を変更する。例えば、信号が無い場合には、オフセットと範囲をランダムに変えればよい。信号はあるが弱く、アダプティブ閾値を超えなかった場合には、オフセットを調整する(すなわち、シグナルに対してゲート及びSを動かして再度試行する)。その際のオフセットは、検出器によって検出される反射光の強度に基づいて設定される。
【0022】
ブロック12において潜在的に問題が有りうるのは、シースと内部反射(internal reflections)がカテーテルを用いた、もしくはシグナルを用いている場合で、このとき、最大の信号が生体組織の内側にある。このような場合には、導関数がTより大きい複数の位置「z」が存在し得る。
【0023】
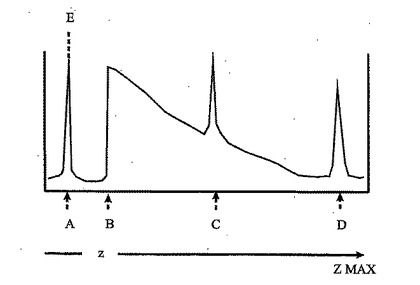
このような場合には、上記規則A,B及びCを解析して、どれが生体組織表面に対応するか決定する。図10は、考えられる4つの当たりを示している。生体組織表面に対応するものは一つしかない。εを微小変化量とする。ピーク「A」は、孤立した当たりであり、ピークの両側に感知できるような信号は無い。このため、zA−ε<zA<zA+εに対して、I(zA±ε)≪I(z)が存在する。ピーク「B」は、前側(つまり左側)には信号が無いが後側(つまり右側)にはあるようなピークを示している。このため、zB−ε<zBに対して、I(zB−ε)≪I(zB)かつI(zB)〜I(zB+ε)である。言い方を変えれば、図10は、信号(画像データ)閾値を超えないような4つの場合を示している。ピーク「A」は、ピークの前もしくは後ろ(すなわち、隣の画素内、変化量であるε内)に信号が無い(上述のように(z0)もしくは以下のように(zmax)と呼ばれるときがある)。そのため、このピークは無視する。同じ規則から、ピーク「D」を無視する。このピークは、該ピークの前後に信号が無い。ピーク「C」の場合、ピークの前後に信号がある。従って、このピークは表面ではあり得ない。ピーク「B」はピークの後に信号があるがピークの前には無い。従って、ピーク「B」は、生体組織表面の境界が開始することを示している。
【0024】
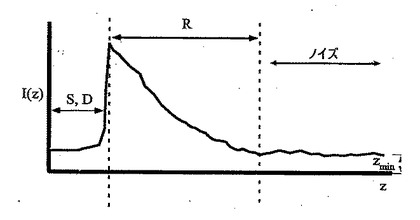
ブロック14に戻ると、今や定められた範囲があり、それは大抵最初の走査線に対して所望されるものよりも大きい。図11は、一つの走査線を示す。最適の走査範囲Rが特定されるべき対象である。先ず、曲線を平滑化する(上述の方法を参照)。続いて2番目に、明らかに信号が無いような大きなzまで外に出る、すなわち、I(zmax)=ノイズであるような所を見つける。これは、〔I(z±ε)〕の標準偏差が小さくなる所を探すことによって確かめることができる。3番目に、I(z)が再び増加し始めるまで、すなわちI(z′)>I(zmax)(ここでR=z′−S)となるまで、zを減らす(すなわち、zをSの方にずらす)。
【0025】
同じような結果が得られる他の方法は、最初に平滑化して曲線の微分をとり、d(I(z′))/dz=0(従ってR=z′−S)となる所を探すというものである。
【0026】
別の統計的な手法も可能である。走査範囲Rの外側では最小限の信号を、そして内側ではできるだけ大きな信号が欲しいとするのが、基本的な操作パラメータである。これは、0次、もしくは1次の導関数、2次の導関数、確率分布関数の統計(例えば標準偏差)、指数関数によるフィッティング、及びこの分野で周知のその他の標準的なデータ解析処理によって実現することができる。
【0027】
ノイズの中のスパイクであって、これがアーティファクトでありかつ信号解に数えられることがあるとすると、このスパイクは潜在的な問題となる可能性がある。フィルタ(中間値、階層(ordered)、アダプティブ(adaptive)、クロージング(closing)、拡張/収縮(dilitation)あるいはこの分野で周知の他のフィルタ)をレンジ・アーティファクト(range artifact)から出ることによって生じるスパイクを解消するために用いることができる。
【0028】
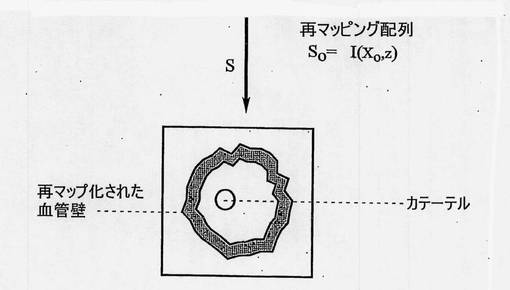
図9に戻って、ブロック16において参照アーム遅延波形を修正/調整する。コンピュータによって収集されたデータと参照アーム位置との間には、既知の1:1の関係がある。光遅延線を制御する波形を修正/調整するために、S及びRを用いることができる。この段階で、ガルバノメータの波形を制御する式の中にS及びRを入れなければならない。こうして、G(t)=f(S,R,t)となる。なお、G(t)はガルバノメータの波形であり、fは関数である。このG(t)は、デジタル的もしくはアナログ的にガルバノメータの波形に送られる。図12は、コンピュータ・メモリー・ブロック20へのガルバノメータの波形の出力/記憶の配列を示し、これがブロック28における再マッピングへと進む。ここで「N」は撮像あたりの軸線走査の数である。このS,Rの配列は、再び(図9の)ブロック28に対して、データを実空間にどのように再マップ化するかを示している。
【0029】
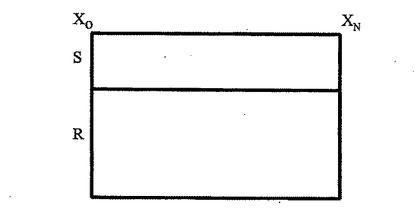
ブロック28(図9ならびに関連の個所の記載を再び参照されたい)から得られる新しいウィンドウを図13Bは示し、図13Aは古いウィンドウを示している。I(x,z)は、ブロック28の再マップ化されたイメージを作るためにS,Rの配列である入力値とともに、再マッピング関数の中に入れられる。全ての走査線、xに対して、異なる要素S及びRが配列で存在する(すなわち、S0はI(x0,z)に対応し、zは連続である)。これは、プローブと選択された範囲との間の距離に関係する。
【0030】
再マッピング(図9のブロック28)は、各走査後に行われることが好ましい。記憶する場合、イメージは収集後に再マップ化される。ディスプレイ表示の場合、再マッピングは、双方向的に行われる。走査線(垂直バー)のそれぞれに対して既知のSをそれぞれデータに加えて、外形輪郭を再マップ化する。画像のオフセットにSを加える。言い換えれば、Sによる任意の所定の露出に対してデータをシフトさせる。各垂直バーは、各S値に基づいて(軸線走査)最マップ化される(シフトされる)。例えば、x1におけるzの値は、S1によるオフセットである。
【0031】
複数の異なる式を再マッピングに用いることができる。その例を以下に示す:
(1)I(xn,z)=Iacq(xn,z−Sn)
(2)I(xn,z)=Iacq(xn,z−Sn−1)
(3)I(xn,z)=Iacq(xn,z−Sn+1)
ここで、nは、特定の軸線走査を示し、このとき、nはマッピングが行われている所に近接している。
【0032】
このように、イメージを再マップ化/再ディスプレイ表示するために配列R,Sを用いている。これは、最マップ化されたイメージを蓄積するのに最も効率的な方法である。Sは、蓄積された+Iacq(z)とすることができ、再構築されたオフラインとすることができる。あるいは、S+Iacq(z)を、動的に、もしくは相互作用的に再構築することができる。
【0033】
ブロック18において参照アームに出力を送り、さらにブロック20においてコンピュータにも蓄える。ブロック22において撮像が終了していない場合には、画像を収集するまで、繰り返しブロック12に回帰することによって、ブロック24において次の走査線を調べる。もし撮像が済めば、続いて、ブロック20よりコンピュータメモリーに蓄えられてそこから呼び出される修正参照アーム遅延波形と表面S情報とを用いて、ブロック28において画像を再マップ化する。次いでブロック30において画像を保存ないし再表示する。もし他の画像がブロック32において調べられない場合、ブロック40において処理を行う。
【0034】
選択的に、ブロック32において他の画像を撮る場合、ブロック34においてアルゴリズムが新たな場所を調べるのかどうか尋ねる。もしそうであるなら、そのときには線36で、ブロック10において最初の走査線を調べる。もし線38で画像を走査しないなら、そのときには次の表面部位Sをブロック12において検出する。
【0035】
〔オートフォーカス〕
他の実施形態において、本発明は、オートフォーカス・モードで用いることができる。図14は、オートフォーカス・アルゴリズムのための流れ図を示している。
【0036】
もしSnとRnとが分かっていれば、最適の焦点距離も分かり、最適のスポットサイズと共焦点パラメータを計算することができる。もし何らかの関数「g」がカテーテルに与えられ、このとき、このカテーテルはzfだけ焦点が画素「n」において(このときSnは既知である)変化すれのであれば、そのときは、知らなければならないことの全ては、もしSkにいるなら、(Sk−Sn)としてどのようにgが変化するか計算できるということである。従って、所定のnに対して、zf(n)の焦点を得るのに、カテーテルに対してなすべきは何かということが分かる。Snもやはり既知である。それで、全てのnに対して、Sn+1がg(n+1)を生成する。言い換えれば、Sによって、焦点を調整することができるようになり、その結果、焦点が最適に生体組織内もしくは生体組織表面に位置するようになる。Rによって、共焦点パラメータを調整することができるようになり、その結果、スポットサイズが最適の走査範囲に亙って最小化されるようになる。画像から得られる動的フィードバックを用いながら、上記のカテーテルの修正、変更が実時間で行われる。これらの性能向上によって、検査を行いながら生体組織の最適の撮像が可能となる。
【0037】
本発明の鍵となる特徴は、位置が分かっていれば、焦点をどこに動かすべきか算出することができるという点である。毎回焦点が最適となるまで焦点を修正変更する必要はなく、1回だけしかも一旦Sが算出されれば、その後は、走査に関する前のもしくは現在のSを用いて焦点が修正変更される。本発明により、不規則な表面を有する生体組織を撮像し、概ね全画像を視野に置くことが可能になる。さらに、有用な画像情報しか含まないように走査範囲が削減され、そのため、信号の帯域幅が減り、場合によっては3〜5倍程までも画像感度が向上する。ヘテロダインもしくはロックイン検出を行う一方で、ノイズの阻止に用いられるフィルタの帯域幅を減らすことによって感度の向上を図ることができる。このフィルタ帯域幅は、ダイオードで切り替えられるキャパシタアレイを用いて動的に調整することができる。感度を増加させることは、精度を保ちつつ速度を上げるということ等価である。この点は、心血管システムを撮像する際に重要である。さらに、速度を増やすことによって、管腔の拡張を伴う心拍ならびに血圧に起因したモーション・アーティファクト(motion artifact)と、それに付随したアーム−試料距離の修正変更が低減する。オートフォーカスにより、どの走査位置に対しても、素早く生体組織上に最適な焦点を位置決めすることが可能になり、こうして、画像がより鮮明になる。また、本発明は、プローブ長さの変動を補償するという利点も有している。
【0038】
本発明は、本明細書に記載されたような時間遅延走査ユニットを提供する。また、本発明は、光学的走査システムのための焦点調整機構を提供する。また、本発明は、表面トポグラフィによる生体組織表面に対するプローブ距離の変化とプローブ長さの設計をより正確に決定するための時間遅延走査の方法を提供する。
【0039】
〔共焦点パラメータ〕
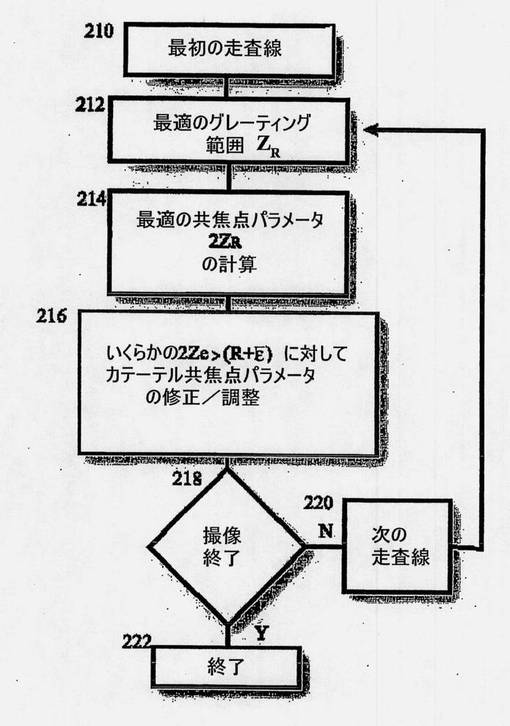
図15は、共焦点顕微鏡検査解析の間の共焦点パラメータ調整に関するアルゴリズムを示す。共焦点パラメータは、R、最適走査ゲート範囲に最適化されている。ブロック210において最初の走査線が調べられた後、(上述したように)最適の格子範囲Rが決定される(ブロック212)。最適の共焦点パラメータ2zRは、ブロック214において算出される。次に、カテーテル共焦点パラメータがブロック216において大体2ze(R+ε)に対して調整変更される。ブロック218において撮像が終了していないならば、次の走査線220に進む。もし走査が終了であれば、ブロック222で終了する。2zR=(2πω02)/λである。ここで、ω0はビーム半径、λは波長、2zRは共焦点パラメータである。
【0040】
〔装置〕
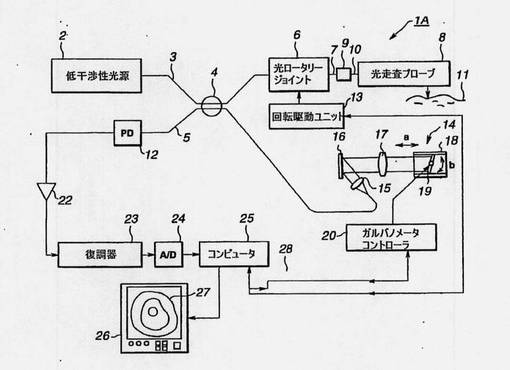
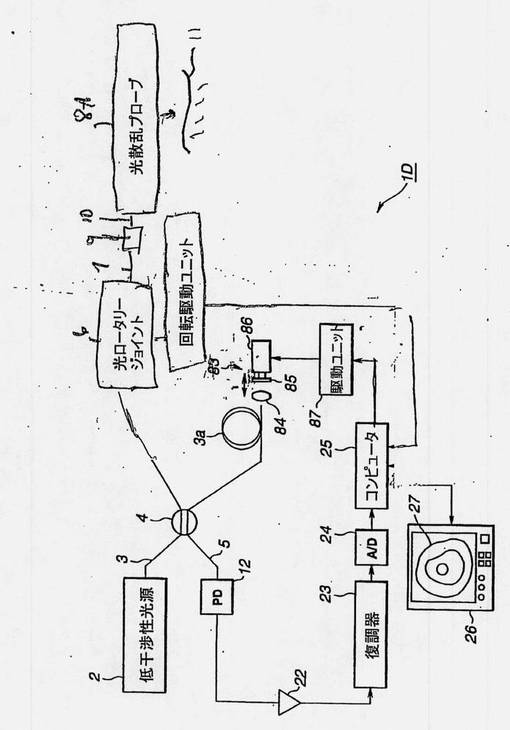
図16は、本発明の一実施形態による装置を概略的に示している。この装置の基本的な記述ならびに一連の図面は、オザワらによる米国特許第6,069,698号明細書に見られ、その開示内容は、本明細書に包括系に組み込まれている。図16の関連する部材の基本的な記載は、オザワらによる図1に対応する。
【0041】
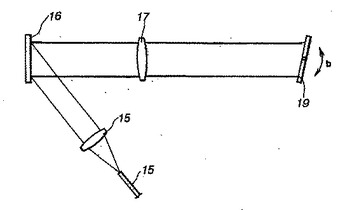
図17は、遅延線を概略的に示している。このガルバノメータは、一つのモータであり、ミラーに取付けられて該ミラーを部分的に傾斜/回転させる。遅延は一つだけ必要であるが、一つよりも多い遅延線でも構わない。別構成として、ミラーを固定させて回転しないようにするために、時間の関数として間隔(周期)が変わる格子を用いることができる。当業者に周知慣用とされた簡単な回折格子、ブレーズ格子、あるいはその他の回折格子を用いることができる。回折格子は、レンズ、ならびに参照アーム内の光遅延をミラー角度の関数として変化させるガルバノメータ走査ミラーに異なる波長を送る。
【0042】
図18は、これと別のシステムを概略的に示す図である。このシステムでは、直線変換装置85上に直線運動するようにして取付けられたミラー84によって遅延線が作り出されている。ここで、直線変換装置85は、モータ/駆動ユニット86,87によって制御されている。図18の基本的な構成部材の記述は、オザワらによる図11に対応した記載に見られる。上記ミラー84は、所定の速度で振動する。本発明により、アルゴリズムは、ミラー84に進退走査を行わせ、時間と共に生体組織の表面をなぞるように次第にその並進運動をシフトさせる。ミラー84が走査される毎に、この走査を一走査ないし一軸探査と呼ぶ。
【0043】
図19(オザワらによる図6と同様)は、さらに他のシステムを概略的に示している。このシステムでは、ドラム65は、コンピュータ25によって制御されている。圧電素子によって引き起こされたドラム径の僅かな変化によって、ドラムの周囲に巻回された細いファイバが引き伸ばされる。増加したファイバ長さが遅延線に寄与する。
【0044】
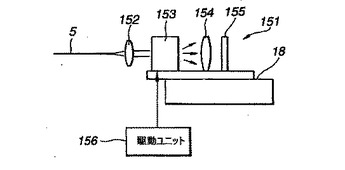
図20は、これとは別に音響光学変調器153を使用する構成を表している。音響光学変調器153は、コンピュータ制御された回折格子であり、このとき、回折格子の周期は、音響光学変調器に対する周波数に応じて変えることができる。
【0045】
図21は、本発明によるカテーテルを示し、オザワらによる図4を変えたものである。
【0046】
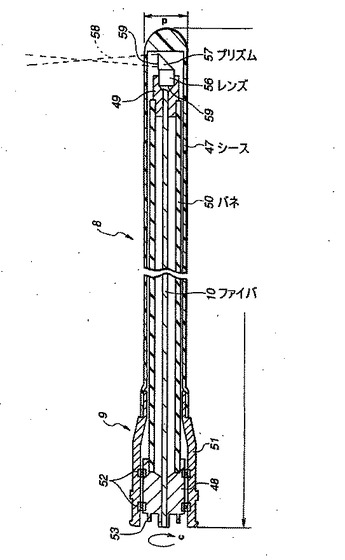
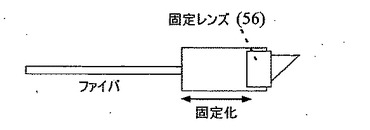
図22は、本発明の一実施形態によるカテーテルの詳細を示す。この構成は、オザワらによる図4に基づくものである。図22Aは(図21の詳細)は、ブロック49内に固定された光ファイバを有するカテーテルの遠位終端部を示している。ここで、ブロック49は、ファイバをバネに固定している。固定されたブロック49の代わりに、本発明は、長さが変えられるブロックを用いる。一実施形態において、上記ブロックは、ワイヤ49Bによって接続された圧電変換器(「ピエゾ」)49Aである。電圧によってピエゾ49Aの長さが変更され、従ってレンズ56と光ファイバの先端との間の離隔距離(ギャップ)が変更される。ファイバ先端に対するレンズの動きは、インセット図22A内に示されている。符号58は、出射光である。符号58aは、ピエゾ電圧Vaでの出射光であり、符号58bは、ピエゾ電圧Vbでの出射光である。
【0047】
レンズとファイバ先端との間の距離を制御可能に変える別の方法がある。一つの方法は、ピエゾ49の代わりに風船もしくは拡張チャンバを用いることによるものである。ワイヤ49Bの代わりに、カテーテル8内に延在するエア式もしくは液圧式の細管49Cが存在している。図23を参照すると、符号58aは、エアもしくは液体の圧力がPaでの出射光であり、符号58bは、圧力がPbでの出射光である。
【0048】
図24及び図25は、焦点を変換するための2つの一般的な方法である。図24は、一システムを概略的に示す図であって、ファイバとレンズとの間の距離が変化する際に、焦点の位置が変化する様子を表している。対象物距離d1の場合、焦点は、光線をトレースする実線として示されている。距離d2の場合、焦点は、光線をトレースする破線として示されている。距離と焦点長さとの間の関係は、1/d+1/i=1/fである。ここで、「i」は、像までの距離(image distance)である。倍率は、M=i/dである。
【0049】
図25は、一つのシステムを概略的に示している。このシステムでは、ファイバ‐レンズ離隔距離は、固定され、レンズと反射器/プリズムとの間の離隔距離が変更される。本実施形態では、距離d1での光ビームは、距離d2での光ビームと比べて異なる焦点を有している。この変換は、上述したどの機構を用いても実現することができる。
【0050】
図26は、一つのシステムを概略的に示している。このシステムでは、ファイバと、複数の要素からなる複合レンズとの間のギャップは固定され、例えばレンズと反射器との間のギャップが固定されるが、個々のレンズ要素間のギャップの相対的な離隔距離が変わる。別の実施形態では、柔軟なカバー(外皮)を有しかつ光学的に透明な液体(例えば塩水、オイル)、ガス、もしくはその他の物質で満たされたレンズが用いられる。流体成分、柔軟なカバーの形状等が変更されると、焦点距離も変わる。
【0051】
本明細書中、「所定の」、「一つの」という言葉は、単に「1個の」という意味に限定されず、むしろ、「1個」より多い数のことも意味する場合があることは理解されよう。本発明は、特定の実施形態と関連させられて述べられてきたが、これは、本発明を上述の特殊な形態に限定することを意図するものではなく、むしろそれとは逆に、請求項に規定されるような本発明の真の思想と観点の中に含まれると考えられるよう別形態、変形例を網羅しようとすることを意図するものである。本明細書中参照されたあらゆる特許明細書、出願明細書、及び公開文献は、包括的に本明細書に組み込まれているものとする。
【符号の説明】
【0052】
1A・・・光干渉トモグラフィ
2・・・低干渉性光源
3,5,7,10・・・シングルモードファイバ
4・・・光カップラ部
6・・・光ロータリジョイント
8・・・光走査プローブ
9・・・コネクタ部
11・・・生体組織
12・・・フォトダイオード
13・・・回転駆動ユニット
14・・・光路長の可変機構
16・・・グレーティング(回折格子)
18・・・1軸ステージ
19・・・ガルバノメータミラー
20・・・ガルバノメータコントローラ
23・・・復調器
25・・・コンピュータ
S・・・表面位置
R・・・走査範囲
【技術分野】
【0001】
〔関連出願の相互参照〕
本出願は、2001年4月30日に出願され、本出願の譲受人に共に譲渡された仮出願第60/287,477号に対する優先権を主張する。先の出願の内容は、本明細書に包括的に組み込まれている。
【0002】
本発明は、試料表面から反射され、基準光ビームと比較される低干渉性光ビームを用いた光学的イメージング(光学的な撮像)のための方法であって、参照点を基準にした生体組織試料の表面位置と必要な遅延走査範囲(delay scan range)を検出するために実時間動的光学的フィードバックを用いる方法に関する。また、本発明は、この方法を実施するための撮像プローブ装置に関する。
【背景技術】
【0003】
光干渉トモグラフィ(OCT ; optical coherence tomography)(光干渉断層計)は、一つのイメージング技術であり、この技術は、標的の生体組織領域に入射してから生体組織内で散乱により反射されて検出器へと戻る検出光ビームと、基準光ビームとの間の干渉を測定するものである。血管をOCT撮像する際には、撮像プローブを血管内に挿入し、血管壁を予め設定された一連の弧からなるセグメントで360度周方向走査し、これにより、一つの断層イメージを得る。このプローブ先端部は、軸線周りに生体組織断面を周方向走査するように、そして縦方向に血管を区分した長さを走査するように回され、こうして、2次元にマップ化された生体組織構造の情報が得られるようになっている。管腔内のプローブの軸線方向位置は、管腔の軸線方向中心に対して変わらない。しかしながら、壁の表面は、局所的様相や幾何学形状の点で変化することがあり、プローブ先端部と表面との間の距離が変わることになる。従来のOCT撮像は、所定高さからなる概ね矩形の「ウィンドウ(window)」の中に入射光ビームを生成するのに、決められた波形を用いているため、壁の表面高さが変わると、血管壁の所定領域における生体組織データを収集するのに誤差が生じる可能性がある。波形を変調させて、これによりプローブが何処にあって何を見ているかに基づきウィンドウをシフトさせるようなフィードバック機構を設けることが望ましいと考えられる。
【0004】
典型的なOCTシステムの場合、走査する線(scanning line)の長さとその初期位置は、常に一定でありかつ固定されていた。上記問題を克服するための一つのやり方は、ウィンドウをより大きくすることであるが、その際の問題は、同じ時間の間により大きな面積(エリア)に亙って情報を集めるせいで、信号対ノイズ比ならびにそれに伴う感度が悪くなるということにある。
【発明の概要】
【発明が解決しようとする課題】
【0005】
走査の開始位置を異なる場所に調整するために、生体組織表面を特定することを使うことが望ましかろう。表面を特定すれば、サンプリングアーム内での焦点位置を調整するのにも利用できよう。走査範囲を調整するのに生体組織内での光の減衰を特定することを使えれば、さらに望ましかろう。この減衰の特定は、最適の焦点深度ないし共焦点パラメータを決定するのにも用いることができよう。
【課題を解決するための手段】
【0006】
本発明は、試料表面から反射されて基準光ビームと比較される低干渉性光ビームを用いる光学的イメージングを提供する。その際、参照点を基準にした生体組織試料の表面位置及び必要な遅延走査範囲(delay scan range)を見つけるために実時間動的光学的フィードバックが用いられる。また、本発明は、この方法を実施するための撮像プローブ装置に関する。このプローブは、生体組織表面を見つけるまで、最初に一本の線に沿って走査を行う。生体組織表面は、信号無しの状態からより大きな信号への鋭い推移として特定することができる。次に、該プローブが次の線を走査するときには、前回の走査に応じて波形を調整する。
【0007】
本発明は、以下に記載されるような時間遅延走査ユニットを提供する。また、本発明は、光学的走査システムのための焦点調整機構をも提供する。また、本発明は、生体組織表面に対するプローブの距離(これは表面トポグラフィーとプローブ長さの設計/構成により変わる)をより正確に特定するための時間遅延走査の方法を提供する。
【0008】
本発明では、遅延線を作り出すための幾つかの新しい機構の一つとして、ロッキングミラー(rocking mirror)が設けられる。ロッキングミラーは、コンピュータならびに走査プローブと同期させたまま、遥かに素早くかつより正確に動かすことができる。本発明は、位置を特定するための一つのアルゴリズムを提供し、これにより、プローブ先端部から生体組織までの距離に合わせるようにして、ガルバノメータのDCオフセット角に対する変化が決定されるようになっている。加えて、本発明は、有用/有効な画像情報だけが含まれるようにコヒーレンス・ゲート走査深さ(coherence gate scan depth)を調整するため、ガルバノメータのAC角を変更するための動的なアクティブ・フィードバックを提供する。また、最終的に、本発明は、動的なアクティブ・フィードバック用いて、カテーテルの集光特性(焦点距離、スポットサイズ、及び共焦点パラメータ)を調整することが可能である。
【0009】
以下に、本発明の詳細な説明において、本発明の上記ならびにその他の対象、特徴、及び長所について、特許請求の範囲ならびに図面と照らし合わせて論じかつ明らかにする。
【図面の簡単な説明】
【0010】
【図1】従来のDCベースライン・オフセットのセラダイン波形のグラフを表す図である。
【図2A】1回の外形輪郭走査波形の血管壁オフセット外形輪郭形状のグラフを表す図である。
【図2B】ΔLRの通常の(一定オフセット)走査波を示す図である。
【図2C】図2Bのセラダイン波形上に図2Aの外形ΔLを重ね合わせたグラフを表す図である。
【図2D】2つの軸線走査e1及びe2の期間に亙る補正された参照アーム走査を示す図である。
【図3A】走査深さ制御のグラフを表す図である。
【図3B】図3Aの走査範囲と管腔を断面にして表示した図である。
【図3C】実際の走査の断面像を示す図である。
【図4】従来のOCTイメージ・ウィンドウと本発明によるウィンドウを比較して示す図である。
【図5】最初のオフセット及びΔzつまり有効な走査範囲のグラフを表す図である。
【図6】生体組織表面の外形輪郭に対して参照アームによる遅延を適合させるために修正調整されたガルバノメータマップ化波形のグラフを表す図である。
【図7A1】参照アームの連続した遅延走査線を示す図である。
【図7A2】参照アームの連続した遅延走査線を示す図である。
【図7B1】参照アームの連続した遅延走査線を示す図である。
【図7B2】参照アームの連続した遅延走査線を示す図である。
【図7C1】参照アームの連続した遅延走査線を示す図である。
【図7C2】参照アームの連続した遅延走査線を示す図である。
【図8A】ΔLに対するΔxを示す図である。
【図8B】LRに対する時間を示す図である。
【図9】本発明の一実施形態によるアルゴリズムの流れ図である。
【図10】有り得る生体組織表面境界と信号閾値強度の当たりとして考えられる4つの場合を示す図である。
【図11】走査線を示す図である。
【図12】コンピュータメモリへのガルバノメータ波形の出力の蓄積による配列を示す図である。
【図13A】古いウィンドウを示す図である。
【図13B】図9のブロック28から得られる新たなウィンドウを示す図である。
【図14】オートフォーカス・アルゴリズムを供給する本発明の他の実施形態に関する流れ図を示す。
【図15】共焦点顕微鏡解析の間の共焦点パラメータ調整に関するアルゴリズムを示す図である。
【図16】本発明の一実施形態による装置の概略図である。
【図17】遅延線の概略図である。
【図18】直線変換装置85上に往復するように取り付けられたミラー84によって遅延線が内部に作り出される他のシステムを示す概略図である。
【図19】コンピュータ25によってドラム65が内部で制御されるさらに他のシステムを示す概略図である。
【図20】音響光学変調器を用いる他の構成を示す図である。
【図21】本発明によるカテーテルを示す図である。
【図22】本発明の一実施形態によるカテーテルの部分拡大図である。
【図22A】ファイバ先端に対してレンズを動かす様子を示す図22の差し込み部分の図である。
【図23】レンズ−ファイバ距離オフセットを制御するための風船ないし拡張チャンバを組み込んだ構成のカテーテルの部分拡大図である。
【図24】焦点を変えるためのシステムを示す概略図である。
【図25】ファイバ−レンズ離隔距離が固定され、レンズと反射プリズムの間の離隔距離が変更される他の実施形態のシステムの概略図である。
【図26】複数の素子からなる複合レンズとファイバとの間にギャップを有するシステムの概略図である。
【発明を実施するための形態】
【0011】
本発明の様々な特徴ならびに長所は、図面から明らかになろう。なお、図の中で同様の参照符号は、同じかもしくは類似の部材を示している。
【0012】
図1は、典型的なDCベースラインオフセットのセラダイン波形(seradyne waveform)のグラフであり、ここで、LRは参照アームの光学的遅延距離オフセットであり、tは時間(例えば0〜20kHz)である。一つの走査撮像長さは「e1」として示されており、2番目は「e2」として示されている。ピーク・ツー・ピーク振幅は、AC成分と称される。
【0013】
図2Aは、1回の外形輪郭走査波形による血管壁オフセット輪郭のグラフを示す。ここで、x軸は時間、y軸はΔLである。図2Bは、通常の(一定オフセットの)走査波ΔLRを示し、この場合、走査波は、セラダイン波とされ、かつ各周期が1回の走査撮像(走査撮像長さe1を有する太線の軸線走査1、及び走査撮像長さe2を有する軸線走査2として示されている)である。所定の外形輪郭には、範囲が250〜500程度のセラダイン走査が存在し得る。図2Aは、1回の走査の期間に対するオフセット補正を示している。光遅延(ΔL)は、
ΔL=ΔLS−ΔLR
として計算され、このときΔLSは、生体組織表面までのサンプリングアームの距離、ΔLRは、参照アームの光経路である。
【0014】
図2Cは、図2Bのセラダイン波形上に図2Aの外形輪郭ΔLを重ね合わせたものを示している。「A」は開始ゲート、「B」は生体組織ないし血管表面、「C」は生体組織内側、「D」は終了ゲート、「e」波形周期である。図2Dは、2回の軸線走査e1ならびにe2の周期に亙る補正された参照アーム走査を示す。信号対ノイズ比のレベルを低減するために小さなイメージ・ウィンドウが望ましい。走査はオフセット「a」(開始ゲート)で開始される。このオフセットは、僅かに血管表面から離れているので、そのため、血管表面が走査の先頭にくる。これは、アルゴリズム(後で詳述する)を決定するための初期走査オフセット(開始測定)を確立するのに有用である。b−aで表される「b」と「a」の間の差は、外部と血管表面の間のデッドスペースである。b−cは、血管表面内側の領域である。図2Cのイメージ・ウィンドウは、d−aで表すことができる。
【0015】
図3Aは、走査深さ制御のグラフである。図3Bは、図3Aの走査範囲および管腔を断面で表示したものである。最も内側の円がカテーテル1、次の円の外面が血管の管腔2、次の円の外面が血管壁3、最大走査範囲は符号4で示されている。円形領域内の「+」は、有効な走査範囲、円内の「−」(マイナス符号)は、有効な走査範囲を超えている。図3Cは、実際の走査の断面のイメージである。
【0016】
図4は、符号5が付されて四角形で表された従来のOCTイメージ・ウィンドウ(実線による)と、本発明のアルゴリズムを用いて得られるウィンドウ(破線による)(ここで、イメージ・ウィンドウは、符号6が付されている)との比較を示す。より小さなウィンドウ6は、遥かに優れた信号対ノイズ比を有し、そしてそれ故に感度が十分に上がり、その結果イメージ(画像)品質が改善されることになる。
【0017】
これまでのOCTを用いる場合、走査波形は、一定のAC成分、及び固定されたDCないしはゆっくり変化する成分を有している。本発明を用いる場合、波形のAC成分ならびにDC成分は、アルゴリズムからのフィードバックにより変化する。図5を参照すると、「D」,初期オフセット、ならびにΔz,有効な走査範囲が観測され、次の走査に対して波形をどのように変更するかが決定される。図6は、参照アームの遅延を生体組織表面外形輪郭に合わせるためにマップ化された、修正変更されたガルバノメータの波形のグラフである。
【0018】
図7A〜図7Cは、次々に続く参照アームの遅延走査線を示している。図7A1および図7A2は、振幅a1及びΔz1を示す。図7B1および図7B2は、振幅a2=2×a1およびΔz2=2×Δz1を示す。図7C1および図7C2は、振幅a3=0.5×a1およびΔz3=0.5×Δz1を示す。幅(Δz)が長くなればなるほど、それだけ一層参照アーム内の遅延も大きくなる。
【0019】
図8Aは、Δx対ΔLを示す。図8Bは、時間対LRを示す。決められた走査範囲が増えると、ガルバノメータの参照アームAC成分もまた増加する。DCオフセットは、図8Bにおけるように、生体組織表面外形輪郭を表す曲線をなぞる。図8Aの走査1、走査2…等々が、図8Bの走査1、走査2上に写っている点に留意されたい。次々に続く走査3,4,…Nは、同じようにして、生体組織表面オフセットおよび最適の走査範囲に調整される。現在の走査線(軸線走査)ないし幾つかの走査線におけるデータを調べることにより、続くN本の走査線に対して、生体組織表面までのオフセットならびに最適のコヒーレンス・ゲートが決定される。このようにして、実時間動的フィードバックが用いられ、不規則な生体組織外形輪郭が最適な感度で撮像できるようになる。
【0020】
〔方法〕
図9は、本発明の一実施形態によるアルゴリズムの流れ図を示す。比較的大きな走査範囲(ブロック14)(例えば、約3〜10mmであるが、他の範囲を適切なものとして用いてもよい)で、ブロック12において生体組織表面「S」を十分に見つけるために、ブロック10において最初の走査線が調べられる。表面を見つけるために、少なくとも3つの方法の一つを用いることができる。第1の方法は、アダプティブ閾値(「T」)を用いることである。第2の方法は、1次の導関数dI(z)/dz=D1を用いる。第3の方法は、ゼロを横切る2次の導関数d2I(z)/dz2=D2を用いる。
【0021】
必要な幾つかの規則A,B及びCがある。第1の方法の場合、規則「A」は、もしI(z1)>TならばS=z1というものである。第2の方法の場合、規則「B」は、もしdI(z2)/dz>TならばS=z2というものである。第3の方法の場合、規則「C」は、もしd2I(z3)/dz2=0ならばS=z3というものである。微分を行う前にノイズを取り除いて、スパイク前処理をあまり行わなくてもよいようにするために、I(z)をフィルタリングしなければならないことに注意されたい。斯かるフィルタ選別は、当業者に周知の多くのあらゆるフィルタ、例えば、限定はしないが、線形ブラー(linear blur)、ガウシアン、ウィンドウ、ローパスフィルタ、重畳(convolution)、モルフォロジー(morphology)、等々を含めたフィルタを使って行うことができる。表面が見つからない場合には、ブロック10を繰り返すが、ただしブロック12における結果に基づいて範囲オフセット(range offset)を変更する。例えば、信号が無い場合には、オフセットと範囲をランダムに変えればよい。信号はあるが弱く、アダプティブ閾値を超えなかった場合には、オフセットを調整する(すなわち、シグナルに対してゲート及びSを動かして再度試行する)。その際のオフセットは、検出器によって検出される反射光の強度に基づいて設定される。
【0022】
ブロック12において潜在的に問題が有りうるのは、シースと内部反射(internal reflections)がカテーテルを用いた、もしくはシグナルを用いている場合で、このとき、最大の信号が生体組織の内側にある。このような場合には、導関数がTより大きい複数の位置「z」が存在し得る。
【0023】
このような場合には、上記規則A,B及びCを解析して、どれが生体組織表面に対応するか決定する。図10は、考えられる4つの当たりを示している。生体組織表面に対応するものは一つしかない。εを微小変化量とする。ピーク「A」は、孤立した当たりであり、ピークの両側に感知できるような信号は無い。このため、zA−ε<zA<zA+εに対して、I(zA±ε)≪I(z)が存在する。ピーク「B」は、前側(つまり左側)には信号が無いが後側(つまり右側)にはあるようなピークを示している。このため、zB−ε<zBに対して、I(zB−ε)≪I(zB)かつI(zB)〜I(zB+ε)である。言い方を変えれば、図10は、信号(画像データ)閾値を超えないような4つの場合を示している。ピーク「A」は、ピークの前もしくは後ろ(すなわち、隣の画素内、変化量であるε内)に信号が無い(上述のように(z0)もしくは以下のように(zmax)と呼ばれるときがある)。そのため、このピークは無視する。同じ規則から、ピーク「D」を無視する。このピークは、該ピークの前後に信号が無い。ピーク「C」の場合、ピークの前後に信号がある。従って、このピークは表面ではあり得ない。ピーク「B」はピークの後に信号があるがピークの前には無い。従って、ピーク「B」は、生体組織表面の境界が開始することを示している。
【0024】
ブロック14に戻ると、今や定められた範囲があり、それは大抵最初の走査線に対して所望されるものよりも大きい。図11は、一つの走査線を示す。最適の走査範囲Rが特定されるべき対象である。先ず、曲線を平滑化する(上述の方法を参照)。続いて2番目に、明らかに信号が無いような大きなzまで外に出る、すなわち、I(zmax)=ノイズであるような所を見つける。これは、〔I(z±ε)〕の標準偏差が小さくなる所を探すことによって確かめることができる。3番目に、I(z)が再び増加し始めるまで、すなわちI(z′)>I(zmax)(ここでR=z′−S)となるまで、zを減らす(すなわち、zをSの方にずらす)。
【0025】
同じような結果が得られる他の方法は、最初に平滑化して曲線の微分をとり、d(I(z′))/dz=0(従ってR=z′−S)となる所を探すというものである。
【0026】
別の統計的な手法も可能である。走査範囲Rの外側では最小限の信号を、そして内側ではできるだけ大きな信号が欲しいとするのが、基本的な操作パラメータである。これは、0次、もしくは1次の導関数、2次の導関数、確率分布関数の統計(例えば標準偏差)、指数関数によるフィッティング、及びこの分野で周知のその他の標準的なデータ解析処理によって実現することができる。
【0027】
ノイズの中のスパイクであって、これがアーティファクトでありかつ信号解に数えられることがあるとすると、このスパイクは潜在的な問題となる可能性がある。フィルタ(中間値、階層(ordered)、アダプティブ(adaptive)、クロージング(closing)、拡張/収縮(dilitation)あるいはこの分野で周知の他のフィルタ)をレンジ・アーティファクト(range artifact)から出ることによって生じるスパイクを解消するために用いることができる。
【0028】
図9に戻って、ブロック16において参照アーム遅延波形を修正/調整する。コンピュータによって収集されたデータと参照アーム位置との間には、既知の1:1の関係がある。光遅延線を制御する波形を修正/調整するために、S及びRを用いることができる。この段階で、ガルバノメータの波形を制御する式の中にS及びRを入れなければならない。こうして、G(t)=f(S,R,t)となる。なお、G(t)はガルバノメータの波形であり、fは関数である。このG(t)は、デジタル的もしくはアナログ的にガルバノメータの波形に送られる。図12は、コンピュータ・メモリー・ブロック20へのガルバノメータの波形の出力/記憶の配列を示し、これがブロック28における再マッピングへと進む。ここで「N」は撮像あたりの軸線走査の数である。このS,Rの配列は、再び(図9の)ブロック28に対して、データを実空間にどのように再マップ化するかを示している。
【0029】
ブロック28(図9ならびに関連の個所の記載を再び参照されたい)から得られる新しいウィンドウを図13Bは示し、図13Aは古いウィンドウを示している。I(x,z)は、ブロック28の再マップ化されたイメージを作るためにS,Rの配列である入力値とともに、再マッピング関数の中に入れられる。全ての走査線、xに対して、異なる要素S及びRが配列で存在する(すなわち、S0はI(x0,z)に対応し、zは連続である)。これは、プローブと選択された範囲との間の距離に関係する。
【0030】
再マッピング(図9のブロック28)は、各走査後に行われることが好ましい。記憶する場合、イメージは収集後に再マップ化される。ディスプレイ表示の場合、再マッピングは、双方向的に行われる。走査線(垂直バー)のそれぞれに対して既知のSをそれぞれデータに加えて、外形輪郭を再マップ化する。画像のオフセットにSを加える。言い換えれば、Sによる任意の所定の露出に対してデータをシフトさせる。各垂直バーは、各S値に基づいて(軸線走査)最マップ化される(シフトされる)。例えば、x1におけるzの値は、S1によるオフセットである。
【0031】
複数の異なる式を再マッピングに用いることができる。その例を以下に示す:
(1)I(xn,z)=Iacq(xn,z−Sn)
(2)I(xn,z)=Iacq(xn,z−Sn−1)
(3)I(xn,z)=Iacq(xn,z−Sn+1)
ここで、nは、特定の軸線走査を示し、このとき、nはマッピングが行われている所に近接している。
【0032】
このように、イメージを再マップ化/再ディスプレイ表示するために配列R,Sを用いている。これは、最マップ化されたイメージを蓄積するのに最も効率的な方法である。Sは、蓄積された+Iacq(z)とすることができ、再構築されたオフラインとすることができる。あるいは、S+Iacq(z)を、動的に、もしくは相互作用的に再構築することができる。
【0033】
ブロック18において参照アームに出力を送り、さらにブロック20においてコンピュータにも蓄える。ブロック22において撮像が終了していない場合には、画像を収集するまで、繰り返しブロック12に回帰することによって、ブロック24において次の走査線を調べる。もし撮像が済めば、続いて、ブロック20よりコンピュータメモリーに蓄えられてそこから呼び出される修正参照アーム遅延波形と表面S情報とを用いて、ブロック28において画像を再マップ化する。次いでブロック30において画像を保存ないし再表示する。もし他の画像がブロック32において調べられない場合、ブロック40において処理を行う。
【0034】
選択的に、ブロック32において他の画像を撮る場合、ブロック34においてアルゴリズムが新たな場所を調べるのかどうか尋ねる。もしそうであるなら、そのときには線36で、ブロック10において最初の走査線を調べる。もし線38で画像を走査しないなら、そのときには次の表面部位Sをブロック12において検出する。
【0035】
〔オートフォーカス〕
他の実施形態において、本発明は、オートフォーカス・モードで用いることができる。図14は、オートフォーカス・アルゴリズムのための流れ図を示している。
【0036】
もしSnとRnとが分かっていれば、最適の焦点距離も分かり、最適のスポットサイズと共焦点パラメータを計算することができる。もし何らかの関数「g」がカテーテルに与えられ、このとき、このカテーテルはzfだけ焦点が画素「n」において(このときSnは既知である)変化すれのであれば、そのときは、知らなければならないことの全ては、もしSkにいるなら、(Sk−Sn)としてどのようにgが変化するか計算できるということである。従って、所定のnに対して、zf(n)の焦点を得るのに、カテーテルに対してなすべきは何かということが分かる。Snもやはり既知である。それで、全てのnに対して、Sn+1がg(n+1)を生成する。言い換えれば、Sによって、焦点を調整することができるようになり、その結果、焦点が最適に生体組織内もしくは生体組織表面に位置するようになる。Rによって、共焦点パラメータを調整することができるようになり、その結果、スポットサイズが最適の走査範囲に亙って最小化されるようになる。画像から得られる動的フィードバックを用いながら、上記のカテーテルの修正、変更が実時間で行われる。これらの性能向上によって、検査を行いながら生体組織の最適の撮像が可能となる。
【0037】
本発明の鍵となる特徴は、位置が分かっていれば、焦点をどこに動かすべきか算出することができるという点である。毎回焦点が最適となるまで焦点を修正変更する必要はなく、1回だけしかも一旦Sが算出されれば、その後は、走査に関する前のもしくは現在のSを用いて焦点が修正変更される。本発明により、不規則な表面を有する生体組織を撮像し、概ね全画像を視野に置くことが可能になる。さらに、有用な画像情報しか含まないように走査範囲が削減され、そのため、信号の帯域幅が減り、場合によっては3〜5倍程までも画像感度が向上する。ヘテロダインもしくはロックイン検出を行う一方で、ノイズの阻止に用いられるフィルタの帯域幅を減らすことによって感度の向上を図ることができる。このフィルタ帯域幅は、ダイオードで切り替えられるキャパシタアレイを用いて動的に調整することができる。感度を増加させることは、精度を保ちつつ速度を上げるということ等価である。この点は、心血管システムを撮像する際に重要である。さらに、速度を増やすことによって、管腔の拡張を伴う心拍ならびに血圧に起因したモーション・アーティファクト(motion artifact)と、それに付随したアーム−試料距離の修正変更が低減する。オートフォーカスにより、どの走査位置に対しても、素早く生体組織上に最適な焦点を位置決めすることが可能になり、こうして、画像がより鮮明になる。また、本発明は、プローブ長さの変動を補償するという利点も有している。
【0038】
本発明は、本明細書に記載されたような時間遅延走査ユニットを提供する。また、本発明は、光学的走査システムのための焦点調整機構を提供する。また、本発明は、表面トポグラフィによる生体組織表面に対するプローブ距離の変化とプローブ長さの設計をより正確に決定するための時間遅延走査の方法を提供する。
【0039】
〔共焦点パラメータ〕
図15は、共焦点顕微鏡検査解析の間の共焦点パラメータ調整に関するアルゴリズムを示す。共焦点パラメータは、R、最適走査ゲート範囲に最適化されている。ブロック210において最初の走査線が調べられた後、(上述したように)最適の格子範囲Rが決定される(ブロック212)。最適の共焦点パラメータ2zRは、ブロック214において算出される。次に、カテーテル共焦点パラメータがブロック216において大体2ze(R+ε)に対して調整変更される。ブロック218において撮像が終了していないならば、次の走査線220に進む。もし走査が終了であれば、ブロック222で終了する。2zR=(2πω02)/λである。ここで、ω0はビーム半径、λは波長、2zRは共焦点パラメータである。
【0040】
〔装置〕
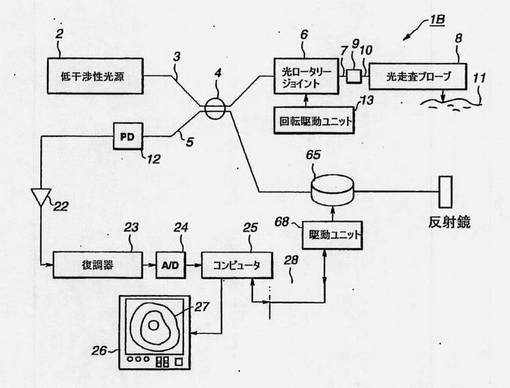
図16は、本発明の一実施形態による装置を概略的に示している。この装置の基本的な記述ならびに一連の図面は、オザワらによる米国特許第6,069,698号明細書に見られ、その開示内容は、本明細書に包括系に組み込まれている。図16の関連する部材の基本的な記載は、オザワらによる図1に対応する。
【0041】
図17は、遅延線を概略的に示している。このガルバノメータは、一つのモータであり、ミラーに取付けられて該ミラーを部分的に傾斜/回転させる。遅延は一つだけ必要であるが、一つよりも多い遅延線でも構わない。別構成として、ミラーを固定させて回転しないようにするために、時間の関数として間隔(周期)が変わる格子を用いることができる。当業者に周知慣用とされた簡単な回折格子、ブレーズ格子、あるいはその他の回折格子を用いることができる。回折格子は、レンズ、ならびに参照アーム内の光遅延をミラー角度の関数として変化させるガルバノメータ走査ミラーに異なる波長を送る。
【0042】
図18は、これと別のシステムを概略的に示す図である。このシステムでは、直線変換装置85上に直線運動するようにして取付けられたミラー84によって遅延線が作り出されている。ここで、直線変換装置85は、モータ/駆動ユニット86,87によって制御されている。図18の基本的な構成部材の記述は、オザワらによる図11に対応した記載に見られる。上記ミラー84は、所定の速度で振動する。本発明により、アルゴリズムは、ミラー84に進退走査を行わせ、時間と共に生体組織の表面をなぞるように次第にその並進運動をシフトさせる。ミラー84が走査される毎に、この走査を一走査ないし一軸探査と呼ぶ。
【0043】
図19(オザワらによる図6と同様)は、さらに他のシステムを概略的に示している。このシステムでは、ドラム65は、コンピュータ25によって制御されている。圧電素子によって引き起こされたドラム径の僅かな変化によって、ドラムの周囲に巻回された細いファイバが引き伸ばされる。増加したファイバ長さが遅延線に寄与する。
【0044】
図20は、これとは別に音響光学変調器153を使用する構成を表している。音響光学変調器153は、コンピュータ制御された回折格子であり、このとき、回折格子の周期は、音響光学変調器に対する周波数に応じて変えることができる。
【0045】
図21は、本発明によるカテーテルを示し、オザワらによる図4を変えたものである。
【0046】
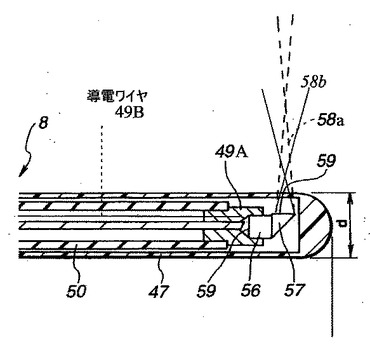
図22は、本発明の一実施形態によるカテーテルの詳細を示す。この構成は、オザワらによる図4に基づくものである。図22Aは(図21の詳細)は、ブロック49内に固定された光ファイバを有するカテーテルの遠位終端部を示している。ここで、ブロック49は、ファイバをバネに固定している。固定されたブロック49の代わりに、本発明は、長さが変えられるブロックを用いる。一実施形態において、上記ブロックは、ワイヤ49Bによって接続された圧電変換器(「ピエゾ」)49Aである。電圧によってピエゾ49Aの長さが変更され、従ってレンズ56と光ファイバの先端との間の離隔距離(ギャップ)が変更される。ファイバ先端に対するレンズの動きは、インセット図22A内に示されている。符号58は、出射光である。符号58aは、ピエゾ電圧Vaでの出射光であり、符号58bは、ピエゾ電圧Vbでの出射光である。
【0047】
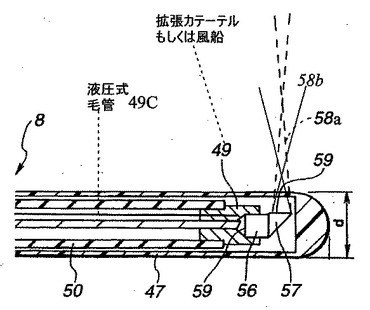
レンズとファイバ先端との間の距離を制御可能に変える別の方法がある。一つの方法は、ピエゾ49の代わりに風船もしくは拡張チャンバを用いることによるものである。ワイヤ49Bの代わりに、カテーテル8内に延在するエア式もしくは液圧式の細管49Cが存在している。図23を参照すると、符号58aは、エアもしくは液体の圧力がPaでの出射光であり、符号58bは、圧力がPbでの出射光である。
【0048】
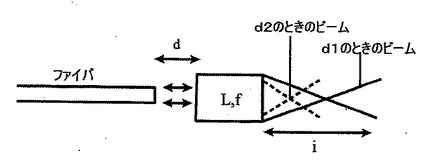
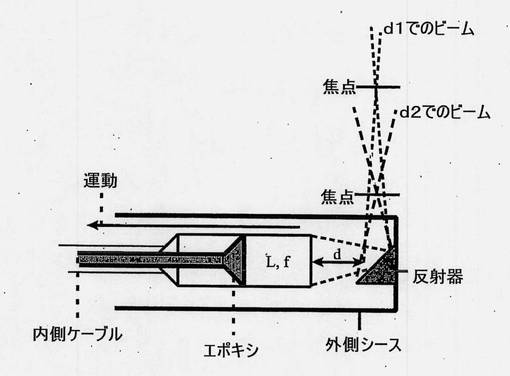
図24及び図25は、焦点を変換するための2つの一般的な方法である。図24は、一システムを概略的に示す図であって、ファイバとレンズとの間の距離が変化する際に、焦点の位置が変化する様子を表している。対象物距離d1の場合、焦点は、光線をトレースする実線として示されている。距離d2の場合、焦点は、光線をトレースする破線として示されている。距離と焦点長さとの間の関係は、1/d+1/i=1/fである。ここで、「i」は、像までの距離(image distance)である。倍率は、M=i/dである。
【0049】
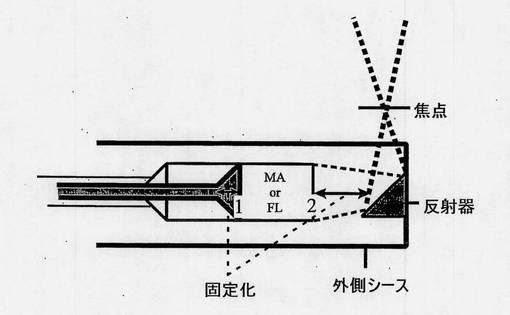
図25は、一つのシステムを概略的に示している。このシステムでは、ファイバ‐レンズ離隔距離は、固定され、レンズと反射器/プリズムとの間の離隔距離が変更される。本実施形態では、距離d1での光ビームは、距離d2での光ビームと比べて異なる焦点を有している。この変換は、上述したどの機構を用いても実現することができる。
【0050】
図26は、一つのシステムを概略的に示している。このシステムでは、ファイバと、複数の要素からなる複合レンズとの間のギャップは固定され、例えばレンズと反射器との間のギャップが固定されるが、個々のレンズ要素間のギャップの相対的な離隔距離が変わる。別の実施形態では、柔軟なカバー(外皮)を有しかつ光学的に透明な液体(例えば塩水、オイル)、ガス、もしくはその他の物質で満たされたレンズが用いられる。流体成分、柔軟なカバーの形状等が変更されると、焦点距離も変わる。
【0051】
本明細書中、「所定の」、「一つの」という言葉は、単に「1個の」という意味に限定されず、むしろ、「1個」より多い数のことも意味する場合があることは理解されよう。本発明は、特定の実施形態と関連させられて述べられてきたが、これは、本発明を上述の特殊な形態に限定することを意図するものではなく、むしろそれとは逆に、請求項に規定されるような本発明の真の思想と観点の中に含まれると考えられるよう別形態、変形例を網羅しようとすることを意図するものである。本明細書中参照されたあらゆる特許明細書、出願明細書、及び公開文献は、包括的に本明細書に組み込まれているものとする。
【符号の説明】
【0052】
1A・・・光干渉トモグラフィ
2・・・低干渉性光源
3,5,7,10・・・シングルモードファイバ
4・・・光カップラ部
6・・・光ロータリジョイント
8・・・光走査プローブ
9・・・コネクタ部
11・・・生体組織
12・・・フォトダイオード
13・・・回転駆動ユニット
14・・・光路長の可変機構
16・・・グレーティング(回折格子)
18・・・1軸ステージ
19・・・ガルバノメータミラー
20・・・ガルバノメータコントローラ
23・・・復調器
25・・・コンピュータ
S・・・表面位置
R・・・走査範囲
【特許請求の範囲】
【請求項1】
実時間フィードバック及び補正により参照点に対する一表面位置を撮像する撮像方法であって、
(a)最初の走査線を取り、
(b)表面位置Sを見つけ、
(c)最適の走査範囲Rを見つけ、
(d)前記最適の走査範囲データをメモリ記憶装置に保存し、
(e)参照アーム遅延波形を調整変更して、出力を供給し、
(f)前記波形の前記出力データをメモリ記憶装置に保存し、
(g)参照アームに前記出力を出力し、
(h)前記画像が全てかどうかを調べ、
(i)前記画像が完全でない場合には、次の走査線まで動かすか、あるいは前記画像が完全である場合には、前記メモリ記憶装置内に蓄えられた前記表面Sデータ及び前記波形データを用いて前記画像を再マッピングし、
(j)前記画像を保存するか画面に表示する
ステップを有する撮像方法。
【請求項2】
請求項1に記載の撮像方法において、
追加の画像が撮られる追加の走査線をさらに取って、上記ステップ(a)から(j)を繰り返すステップ(k)をさらに有していることを特徴とする撮像方法。
【請求項3】
請求項1の撮像方法において、
前記ステップ(i)の再マッピングを式:
(1)I(Xn,z)=Iacq(Xn,z−Sn)
に従って行うことを特徴とする撮像方法。
ここで、nは特定の軸線走査を意味しかつマッピングが行われるところに近く、xは軸線走査の横方向位置、zは走査における深さ位置、Iacqは集められた画像強度、そしてSnは走査nにおける表面距離である。
【請求項4】
請求項1に記載の撮像方法において、
前記ステップ(i)の再マッピングを式:
(2)I(Xn,z)=Iacq(Xn,z−Sn−1)
に従って行うことを特徴とする撮像方法。
ここで、nは特定の軸線走査を意味しかつマッピングが行われるところに近く、xは軸線走査の横方向位置、zは走査における深さ位置、Iacqは集められた画像強度、そしてSnは走査nにおける表面距離である。
【請求項5】
請求項1に記載の撮像方法において、
前記ステップ(i)の再マッピングを式:
(3)I(Xn,z)=Iacq(Xn,z−Sn+1)
に従って行うことを特徴とする撮像方法。
ここで、nは特定の軸線走査を意味しかつマッピングが行われるところに近く、xは軸線走査の横方向位置、zは走査における深さ位置、Iacqは集められた画像強度、そしてSnは走査nにおける表面距離である。
【請求項6】
撮像カテーテルを用いてオートフォーカスモードで実時間フィードバック及び補正により参照点に対する一表面位置を撮像する撮像方法であって、
(a)最初の走査線を取り、
(b)表面位置Sを見つけ、
(c)zを深さを表す変数、εを画素ないし増加分として、大体z>(S+ε)に対してサンプリングアーム焦点を調整変更し、
(d)z=S+εにおける信号I(z)をチェックし、
(e)I(z)が最適化されていない場合には、前記サンプリングアーム焦点を調整変更し、I(z)が最適化されている場合には、次の走査線まで動かす
ステップを有する撮像方法。
【請求項7】
請求項6に記載の撮像方法において、
画像が完全でない場合には、次の走査線まで動かして、上記ステップ(b)から(e)を繰り返すステップ(f)をさらに有していることを特徴とする撮像方法。
【請求項8】
カテーテルによる共焦点顕微鏡のパラメータを調整する方法であって、
(a)最初の走査線を取り、
(b)最適の走査範囲Rを画定し、
(c)w0をビーム半径とし、λを波長とし、2zRを共焦点パラメータとして、2zR=2πw02/λと表すときに、最適の共焦点パラメータ2zRを算出し、
(d)εを画素ないし変化量としたときに、大体2ze>(R+ε)となるように、前記カテーテル共焦点パラメータを調整する
ステップを有する方法。
【請求項9】
請求項8に記載の方法において、
画像が完全でない場合には、次の走査線まで動かして、上記ステップ(b)から(d)を繰り返すステップ(e)をさらに有していることを特徴とする方法。
【請求項10】
請求項8に記載の方法において、
(a)走査データを含む曲線を平滑化し、
(b)略信号がゼロ、である遠い点zを選び、I(zmax)がノイズであるようにし、
(c)I(z′)>I(zmax)かつR=z′−Sとなるまでzを小さくする
ことを含むステップによって前記走査範囲Rを算出することを特徴とする方法。
【請求項11】
請求項8に記載の方法において、
(a)走査データを含む曲線を平滑化し、
(b)曲線の導関数を取り、
(c)d(I(z′))/dz=0かつR=z′−Sとなるところを特定する
ことを含むステップによって前記走査範囲Rを算出することを特徴とする方法。
【請求項12】
試料表面を撮像するための光学的撮像装置であって、
(a)低干渉性光ビームを生成する光源と、
(b)光プローブと、
(c)光コネクタによって前記光プローブに着脱自在に接続可能とされて、前記低干渉性光ビームを含んだ基準光と反射された試料光とを互いに干渉可能にする結合器と、
(d)この干渉を検出する検出器と、
(e)前記検出器によって検出された信号に基づいて画像信号を生成するための画像信号生成器と、
(f)基準光伝達遅延時間を付与するための手段と
を有している光学的撮像装置。
【請求項13】
請求項12に記載の装置において、
前記基準光伝達遅延時間を付与するための手段は、軸上で少なくとも部分的に傾斜及び回転が可能なミラー、ならびに該ミラーを傾斜させかつ回転させるように駆動するガルバノメータを備えていることを特徴とする装置。
【請求項14】
請求項13に記載の装置において、
前記ガルバノメータは、印加電圧に比例して前記ミラーを角度的にふれさせるように設けられていることを特徴とする装置。
【請求項15】
請求項14に記載の装置において、
前記印加電圧は、前記撮像される表面までの前記プローブからの距離を探知する三角形波ないしセラダイン波を含めた駆動波によって規定されていることを特徴とする装置。
【請求項16】
請求項15に記載の装置において、
前記ミラーは、深さ方向の走査を実現するように高い周波数で、しかも前記プローブと前記表面との間の距離に対応するオフセットを重ね合わせた状態で前記角度のふれがつけられるように設けられていることを特徴とする装置。
【請求項17】
請求項16に記載の装置において、
前記遅延時間は、実時間で設定されるように構成されていることを特徴とする装置。
【請求項18】
請求項12に記載の装置において、
前記基準光伝達遅延時間を付与するための手段は、時間の関数として変化する格子周期を持つ回折格子を備えていることを特徴とする装置。
【請求項19】
請求項18に記載の装置において、
前記回折格子は、平面であることを特徴とする装置。
【請求項20】
請求項18に記載の装置にいて、
前記回折格子は、ブレーズ型とされていることを特徴とする装置。
【請求項21】
請求項12に記載の装置において、
前記基準光伝達遅延時間を付与するための手段は、モータで制御される直線変換装置上に、往復するように取り付けられたミラーを備えていることを特徴とする装置。
【請求項22】
請求項12に記載の装置において、
前記基準光伝達遅延時間を付与するための手段は、ドラムを備え、該ドラムが、該ドラム自身の周りに巻回された少なくとも一つの光学的に伝達するファイバを有しており、さらに、コンピュータからの信号に反応して前記ドラムの直径を変えるための前記ドラムに対して設けられたピエゾ電気ユニットを備え、前記ファイバを引き伸ばしたり緩めたりするように設けられていることを特徴とする装置。
【請求項23】
請求項12に記載の装置において、
前記基準光伝達遅延時間を付与するための手段は、コンピュータにより制御される回折格子を備え、該回折格子の周期性は、前記回折格子に対して設けられた音響光学変調器の周波数を用いて変えられるように設けられていることを特徴とする装置。
【請求項24】
(a)ハウジングと、
(b)先端部を有して、少なくとも部分的に前記ハウジング内に配置されている光ファイバと、
(c)前記ファイバ先端部の近傍に、前記ハウジングに対して固定されるように設けられたレンズと、
(d)前記レンズに対して設けられたプリズムと、
(e)前記プリズムを回転するための手段と、
(f)前記ファイバが設けられる圧電変換器と、
(g)導電性のワイヤと、
(h)前記変換器を駆動するための手段とを備え、前記光ファイバ先端部と前記レンズとの間の距離を変えるために、前記変換器の長さを変更するように設けられている撮像プローブ。
【請求項25】
(a)ハウジングと、
(b)先端部を有して、少なくとも部分的に前記ハウジング内に配置されている光ファイバと、
(c)前記ファイバ先端部の近傍に、前記ハウジングに対して固定されるように設けられたレンズと、
(d)前記レンズに対して設けられたプリズムと、
(e)前記プリズムを回転するための手段と、
(f)拡張可能な部材と、
(g)前記光ファイバ先端部と前記レンズとの間の距離を制御自在に変更するよう、前記拡張可能な部材にガスもしくは流体を供給するために、前記拡張可能な部材と接続状態にあるチューブとを備えている撮像プローブ。
【請求項26】
(a)ハウジングと、
(b)先端部を有して、少なくとも部分的に前記ハウジング内に配置されている光ファイバと、
(c)前記ファイバ先端部の近傍に、前記ハウジング内に配置されたレンズと、
(d)前記レンズに対して設けられたプリズムと、
(e)前記プリズムを回転するための手段と、
(f)前記レンズが設けられる圧電変換器と、
(g)導電性のワイヤと、
(h)前記変換器を駆動するための手段とを備え、前記プリズムと前記レンズとの間の距離を変えるために、前記変換器の長さを変更するように設けられている撮像プローブ。
【請求項27】
(a)ハウジングと、
(b)先端部を有して、少なくとも部分的に前記ハウジング内に配置されている光ファイバと、
(c)前記ファイバ先端部の近傍に、前記ハウジング内に配置された複数のレンズ要素と、
(d)前記レンズに対して設けられたプリズムと、
(e)前記プリズムを回転するための手段と、
(f)前記複数のレンズ要素の全体の焦点距離を変更するための手段とを備えている撮像プローブ。
【請求項28】
請求項27に記載の撮像プローブにおいて、
前記焦点距離を変更するための手段は、前記複数のレンズ要素のうち少なくとも2つのレンズ間の相対距離を変更するための手段を備えていることを特徴とする撮像プローブ。
【請求項29】
請求項27に記載の撮像プローブにおいて、
前記複数のレンズ要素は、流体もしくは半流体を内包する柔軟なレンズ外皮を少なくとも一つ備えていることを特徴とする撮像プローブ。
【請求項30】
請求項29に記載の撮像プローブにおいて、
前記流体ないし半流体は、信号に反応して屈折率を変えるように設けられていることを特徴とする撮像プローブ。
【請求項1】
実時間フィードバック及び補正により参照点に対する一表面位置を撮像する撮像方法であって、
(a)最初の走査線を取り、
(b)表面位置Sを見つけ、
(c)最適の走査範囲Rを見つけ、
(d)前記最適の走査範囲データをメモリ記憶装置に保存し、
(e)参照アーム遅延波形を調整変更して、出力を供給し、
(f)前記波形の前記出力データをメモリ記憶装置に保存し、
(g)参照アームに前記出力を出力し、
(h)前記画像が全てかどうかを調べ、
(i)前記画像が完全でない場合には、次の走査線まで動かすか、あるいは前記画像が完全である場合には、前記メモリ記憶装置内に蓄えられた前記表面Sデータ及び前記波形データを用いて前記画像を再マッピングし、
(j)前記画像を保存するか画面に表示する
ステップを有する撮像方法。
【請求項2】
請求項1に記載の撮像方法において、
追加の画像が撮られる追加の走査線をさらに取って、上記ステップ(a)から(j)を繰り返すステップ(k)をさらに有していることを特徴とする撮像方法。
【請求項3】
請求項1の撮像方法において、
前記ステップ(i)の再マッピングを式:
(1)I(Xn,z)=Iacq(Xn,z−Sn)
に従って行うことを特徴とする撮像方法。
ここで、nは特定の軸線走査を意味しかつマッピングが行われるところに近く、xは軸線走査の横方向位置、zは走査における深さ位置、Iacqは集められた画像強度、そしてSnは走査nにおける表面距離である。
【請求項4】
請求項1に記載の撮像方法において、
前記ステップ(i)の再マッピングを式:
(2)I(Xn,z)=Iacq(Xn,z−Sn−1)
に従って行うことを特徴とする撮像方法。
ここで、nは特定の軸線走査を意味しかつマッピングが行われるところに近く、xは軸線走査の横方向位置、zは走査における深さ位置、Iacqは集められた画像強度、そしてSnは走査nにおける表面距離である。
【請求項5】
請求項1に記載の撮像方法において、
前記ステップ(i)の再マッピングを式:
(3)I(Xn,z)=Iacq(Xn,z−Sn+1)
に従って行うことを特徴とする撮像方法。
ここで、nは特定の軸線走査を意味しかつマッピングが行われるところに近く、xは軸線走査の横方向位置、zは走査における深さ位置、Iacqは集められた画像強度、そしてSnは走査nにおける表面距離である。
【請求項6】
撮像カテーテルを用いてオートフォーカスモードで実時間フィードバック及び補正により参照点に対する一表面位置を撮像する撮像方法であって、
(a)最初の走査線を取り、
(b)表面位置Sを見つけ、
(c)zを深さを表す変数、εを画素ないし増加分として、大体z>(S+ε)に対してサンプリングアーム焦点を調整変更し、
(d)z=S+εにおける信号I(z)をチェックし、
(e)I(z)が最適化されていない場合には、前記サンプリングアーム焦点を調整変更し、I(z)が最適化されている場合には、次の走査線まで動かす
ステップを有する撮像方法。
【請求項7】
請求項6に記載の撮像方法において、
画像が完全でない場合には、次の走査線まで動かして、上記ステップ(b)から(e)を繰り返すステップ(f)をさらに有していることを特徴とする撮像方法。
【請求項8】
カテーテルによる共焦点顕微鏡のパラメータを調整する方法であって、
(a)最初の走査線を取り、
(b)最適の走査範囲Rを画定し、
(c)w0をビーム半径とし、λを波長とし、2zRを共焦点パラメータとして、2zR=2πw02/λと表すときに、最適の共焦点パラメータ2zRを算出し、
(d)εを画素ないし変化量としたときに、大体2ze>(R+ε)となるように、前記カテーテル共焦点パラメータを調整する
ステップを有する方法。
【請求項9】
請求項8に記載の方法において、
画像が完全でない場合には、次の走査線まで動かして、上記ステップ(b)から(d)を繰り返すステップ(e)をさらに有していることを特徴とする方法。
【請求項10】
請求項8に記載の方法において、
(a)走査データを含む曲線を平滑化し、
(b)略信号がゼロ、である遠い点zを選び、I(zmax)がノイズであるようにし、
(c)I(z′)>I(zmax)かつR=z′−Sとなるまでzを小さくする
ことを含むステップによって前記走査範囲Rを算出することを特徴とする方法。
【請求項11】
請求項8に記載の方法において、
(a)走査データを含む曲線を平滑化し、
(b)曲線の導関数を取り、
(c)d(I(z′))/dz=0かつR=z′−Sとなるところを特定する
ことを含むステップによって前記走査範囲Rを算出することを特徴とする方法。
【請求項12】
試料表面を撮像するための光学的撮像装置であって、
(a)低干渉性光ビームを生成する光源と、
(b)光プローブと、
(c)光コネクタによって前記光プローブに着脱自在に接続可能とされて、前記低干渉性光ビームを含んだ基準光と反射された試料光とを互いに干渉可能にする結合器と、
(d)この干渉を検出する検出器と、
(e)前記検出器によって検出された信号に基づいて画像信号を生成するための画像信号生成器と、
(f)基準光伝達遅延時間を付与するための手段と
を有している光学的撮像装置。
【請求項13】
請求項12に記載の装置において、
前記基準光伝達遅延時間を付与するための手段は、軸上で少なくとも部分的に傾斜及び回転が可能なミラー、ならびに該ミラーを傾斜させかつ回転させるように駆動するガルバノメータを備えていることを特徴とする装置。
【請求項14】
請求項13に記載の装置において、
前記ガルバノメータは、印加電圧に比例して前記ミラーを角度的にふれさせるように設けられていることを特徴とする装置。
【請求項15】
請求項14に記載の装置において、
前記印加電圧は、前記撮像される表面までの前記プローブからの距離を探知する三角形波ないしセラダイン波を含めた駆動波によって規定されていることを特徴とする装置。
【請求項16】
請求項15に記載の装置において、
前記ミラーは、深さ方向の走査を実現するように高い周波数で、しかも前記プローブと前記表面との間の距離に対応するオフセットを重ね合わせた状態で前記角度のふれがつけられるように設けられていることを特徴とする装置。
【請求項17】
請求項16に記載の装置において、
前記遅延時間は、実時間で設定されるように構成されていることを特徴とする装置。
【請求項18】
請求項12に記載の装置において、
前記基準光伝達遅延時間を付与するための手段は、時間の関数として変化する格子周期を持つ回折格子を備えていることを特徴とする装置。
【請求項19】
請求項18に記載の装置において、
前記回折格子は、平面であることを特徴とする装置。
【請求項20】
請求項18に記載の装置にいて、
前記回折格子は、ブレーズ型とされていることを特徴とする装置。
【請求項21】
請求項12に記載の装置において、
前記基準光伝達遅延時間を付与するための手段は、モータで制御される直線変換装置上に、往復するように取り付けられたミラーを備えていることを特徴とする装置。
【請求項22】
請求項12に記載の装置において、
前記基準光伝達遅延時間を付与するための手段は、ドラムを備え、該ドラムが、該ドラム自身の周りに巻回された少なくとも一つの光学的に伝達するファイバを有しており、さらに、コンピュータからの信号に反応して前記ドラムの直径を変えるための前記ドラムに対して設けられたピエゾ電気ユニットを備え、前記ファイバを引き伸ばしたり緩めたりするように設けられていることを特徴とする装置。
【請求項23】
請求項12に記載の装置において、
前記基準光伝達遅延時間を付与するための手段は、コンピュータにより制御される回折格子を備え、該回折格子の周期性は、前記回折格子に対して設けられた音響光学変調器の周波数を用いて変えられるように設けられていることを特徴とする装置。
【請求項24】
(a)ハウジングと、
(b)先端部を有して、少なくとも部分的に前記ハウジング内に配置されている光ファイバと、
(c)前記ファイバ先端部の近傍に、前記ハウジングに対して固定されるように設けられたレンズと、
(d)前記レンズに対して設けられたプリズムと、
(e)前記プリズムを回転するための手段と、
(f)前記ファイバが設けられる圧電変換器と、
(g)導電性のワイヤと、
(h)前記変換器を駆動するための手段とを備え、前記光ファイバ先端部と前記レンズとの間の距離を変えるために、前記変換器の長さを変更するように設けられている撮像プローブ。
【請求項25】
(a)ハウジングと、
(b)先端部を有して、少なくとも部分的に前記ハウジング内に配置されている光ファイバと、
(c)前記ファイバ先端部の近傍に、前記ハウジングに対して固定されるように設けられたレンズと、
(d)前記レンズに対して設けられたプリズムと、
(e)前記プリズムを回転するための手段と、
(f)拡張可能な部材と、
(g)前記光ファイバ先端部と前記レンズとの間の距離を制御自在に変更するよう、前記拡張可能な部材にガスもしくは流体を供給するために、前記拡張可能な部材と接続状態にあるチューブとを備えている撮像プローブ。
【請求項26】
(a)ハウジングと、
(b)先端部を有して、少なくとも部分的に前記ハウジング内に配置されている光ファイバと、
(c)前記ファイバ先端部の近傍に、前記ハウジング内に配置されたレンズと、
(d)前記レンズに対して設けられたプリズムと、
(e)前記プリズムを回転するための手段と、
(f)前記レンズが設けられる圧電変換器と、
(g)導電性のワイヤと、
(h)前記変換器を駆動するための手段とを備え、前記プリズムと前記レンズとの間の距離を変えるために、前記変換器の長さを変更するように設けられている撮像プローブ。
【請求項27】
(a)ハウジングと、
(b)先端部を有して、少なくとも部分的に前記ハウジング内に配置されている光ファイバと、
(c)前記ファイバ先端部の近傍に、前記ハウジング内に配置された複数のレンズ要素と、
(d)前記レンズに対して設けられたプリズムと、
(e)前記プリズムを回転するための手段と、
(f)前記複数のレンズ要素の全体の焦点距離を変更するための手段とを備えている撮像プローブ。
【請求項28】
請求項27に記載の撮像プローブにおいて、
前記焦点距離を変更するための手段は、前記複数のレンズ要素のうち少なくとも2つのレンズ間の相対距離を変更するための手段を備えていることを特徴とする撮像プローブ。
【請求項29】
請求項27に記載の撮像プローブにおいて、
前記複数のレンズ要素は、流体もしくは半流体を内包する柔軟なレンズ外皮を少なくとも一つ備えていることを特徴とする撮像プローブ。
【請求項30】
請求項29に記載の撮像プローブにおいて、
前記流体ないし半流体は、信号に反応して屈折率を変えるように設けられていることを特徴とする撮像プローブ。
【図1】


【図2A】
【図2B】
【図2C】
【図2D】
【図3A】
【図5】
【図6】
【図7A1】
【図7A2】
【図7B1】
【図7B2】
【図7C1】
【図7C2】
【図8A】
【図8B】
【図10】
【図11】
【図12】
【図13A】
【図17】
【図20】
【図21】
【図22】
【図22A】
【図23】
【図24】
【図3B】
【図3C】
【図4】
【図9】
【図13B】
【図14】
【図15】
【図16】
【図18】
【図19】
【図25】
【図26】
【図2A】
【図2B】
【図2C】
【図2D】
【図3A】
【図5】
【図6】
【図7A1】
【図7A2】
【図7B1】
【図7B2】
【図7C1】
【図7C2】
【図8A】
【図8B】
【図10】
【図11】
【図12】
【図13A】
【図17】
【図20】
【図21】
【図22】
【図22A】
【図23】
【図24】
【図3B】
【図3C】
【図4】
【図9】
【図13B】
【図14】
【図15】
【図16】
【図18】
【図19】
【図25】
【図26】
【公開番号】特開2013−63323(P2013−63323A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−282501(P2012−282501)
【出願日】平成24年12月26日(2012.12.26)
【分割の表示】特願2002−585939(P2002−585939)の分割
【原出願日】平成14年4月30日(2002.4.30)
【出願人】(592017633)ザ ジェネラル ホスピタル コーポレイション (177)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2012−282501(P2012−282501)
【出願日】平成24年12月26日(2012.12.26)
【分割の表示】特願2002−585939(P2002−585939)の分割
【原出願日】平成14年4月30日(2002.4.30)
【出願人】(592017633)ザ ジェネラル ホスピタル コーポレイション (177)
【Fターム(参考)】
[ Back to top ]