
煙感知器
【課題】虫や埃による誤検知を低減した小型の煙感知器を提供する。
【解決手段】煙感知器1は、外部からの光の進入を抑制し且つ煙の出入りを許容する煙感知室2と、煙感知室2内の複数の検知領域A1,A2にそれぞれ光を照射する発光部3a,3bと、発光部3a,3bからの直接光は入射せず、それぞれの検知領域A1,A2に流入した煙による散乱光を受光可能な受光部4と、発光部3aのみを点灯させた時の受光部4の出力と発光部3bのみを点灯させた時の受光部4の出力とをもとに煙の有無を判別する判定部5を備えている。発光部3a,3bの各々には、検知領域A1,A2が重ならないように照射光の照射範囲S1,S2を制限する光制限部材11が一体に設けられている。受光部4には、検知領域A1,A2が重ならないように受光光の受光範囲S3を制限する光制限部材12が一体に設けられている。
【解決手段】煙感知器1は、外部からの光の進入を抑制し且つ煙の出入りを許容する煙感知室2と、煙感知室2内の複数の検知領域A1,A2にそれぞれ光を照射する発光部3a,3bと、発光部3a,3bからの直接光は入射せず、それぞれの検知領域A1,A2に流入した煙による散乱光を受光可能な受光部4と、発光部3aのみを点灯させた時の受光部4の出力と発光部3bのみを点灯させた時の受光部4の出力とをもとに煙の有無を判別する判定部5を備えている。発光部3a,3bの各々には、検知領域A1,A2が重ならないように照射光の照射範囲S1,S2を制限する光制限部材11が一体に設けられている。受光部4には、検知領域A1,A2が重ならないように受光光の受光範囲S3を制限する光制限部材12が一体に設けられている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、煙感知器に関するものである。
【背景技術】
【0002】
従来、発光素子と、2つの受光素子とを暗箱内に配置した光電式の煙感知器があった(例えば特許文献1参照)。
【0003】
光電式の煙感知器では、暗箱内に煙が流入すると、発光素子の発光が煙によって散乱され、その散乱光が受光素子に入射されるので、受光素子の出力と所定のしきい値との高低を比較することで煙の存否を感知している。しかし、暗室内に虫や埃などが入り込むと、虫や埃などで散乱された光が受光素子に入射して、誤報が発生する可能性があるため、特許文献1の煙感知器では、2つの受光素子が、それぞれ別々の受光領域で煙による散乱光を受光し、一方の受光領域のみで散乱光が受光された場合は虫や埃などによる誤報と判断している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実開平2−6394号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した特許文献1の煙感知器では、2つの受光素子による受光領域を独立させるために、隔離板を暗箱内に設けていた。暗箱の内部は、発光素子の発光を反射して受光素子に入射させないように光学的な設計が行われているが、暗箱内を仕切るように隔離板を配置する場合、光学的な設計がやりにくいという問題がある。また隔離板を設けることによって、暗箱が大型化し、それによって煙感知器全体が大型化するという問題もあった。
【0006】
本発明は上記課題に鑑みて為されたものであり、その目的とするところは、虫や埃による誤検知を低減した小型の煙感知器を提供することにある。
【課題を解決するための手段】
【0007】
本願の煙感知器は、煙感知室と、発光部と、受光部と、判定部とを備える。煙感知室は、外部からの光の進入を抑制し且つ煙の出入りを許容する。発光部は前記煙感知室内の複数の検知領域に光を照射する。受光部には、前記発光部からの直接光は入射せず、それぞれの前記検知領域に流入した煙による散乱光が入射する。判定部は、前記受光部の出力に基づいて前記煙感知室内に煙が進入したか否かを判定する。そして、前記発光部及び前記受光部のうち少なくとも何れか一方と一体に光制限部材が設けられ、この光制限部材によって複数の前記検知領域が重ならないように光の範囲が制限される。
【0008】
この煙感知器において、1つの前記受光部に対して、前記発光部が複数設けられ、複数の前記発光部がそれぞれ対応する検知領域に光を照射することも好ましい。
【0009】
この煙感知器において、各々の前記発光部の光軸と前記受光部の光軸との為す交差角が互いに異なる角度に設定されることも好ましい。
【0010】
この煙感知器において、複数の前記発光部及び前記受光部の光軸を含む平面上で、複数の前記発光部が、前記受光部の光軸に対して同じ側に配置されることも好ましい。
【0011】
この煙感知器において、複数の前記発光部及び前記受光部の光軸を含む平面上で、複数の前記発光部が、前記受光部の光軸に対して両側に配置されることも好ましい。
【0012】
この煙感知器において、前記判定部は、複数の前記発光部が同時に発光しないように、複数の前記発光部の発光を制御する。そして、前記判定部は、複数の前記発光部の各々を個別に発光させた状態での前記受光部の出力をもとに、前記煙感知室内の状態を判定することも好ましい。
【0013】
この煙感知器において、前記判定部は、複数の前記検知領域の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で、前記検知領域に対応する前記発光部を発光させる。そして、前記判定部は、何れかの前記発光部を発光させた状態での前記受光部の出力が閾値を超え、且つ、別の前記発光部を発光させた状態での前記受光部の出力が前記閾値よりも小さい場合、煙以外の異物が前記煙感知室内に進入したと判断することも好ましい。
【0014】
この煙感知器において、前記判定部は、複数の前記検知領域の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で対応する前記発光部を発光させる。そして、前記判定部は、複数の前記発光部の各々を個別に発光させた状態での前記受光部の出力が全て閾値を超えた場合、前記煙感知室内に煙が進入したと判断することも好ましい。
【0015】
この煙感知器において、前記判定部は、複数の前記発光部を間欠的に発光させ、前記受光部の出力に基づいて判定動作を行うことも好ましい。
【0016】
この煙感知器において、前記判定部は、非検知状態では何れか1つの前記発光部を間欠的に発光させる。そして、何れか1つの前記発光部が発光した状態で前記受光部の出力が閾値を超えると、前記判定部は、複数の前記検知領域の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で、他の前記発光部の各々を個別に発光させることも好ましい。
【0017】
この煙感知器において、各々の前記発光部の光軸と前記受光部の光軸との為す交差角が互いに異なる角度に設定され、前記判定部は、前記受光部の出力と閾値との高低を比較することによって、前記煙感知室内に煙が進入したか否かを判定している。そして、前記交差角が相対的に大きい前記発光部が発光した状態での前記受光部の出力に対する、前記交差角が相対的に小さい前記発光部が発光した状態での前記受光部の出力の割合が、所定の基準値よりも大きくなると、前記判定部は、煙感知室内に進入した煙を黒煙と判別して、前記閾値を低下させることも好ましい。
【0018】
この煙感知器において、前記判定部は、前記交差角が相対的に小さい前記発光部の発光時間及び発光光量のうち少なくとも何れか一方を、前記交差角が相対的に大きい前記発光部よりも大きくすることも好ましい。
【0019】
この煙感知器において、前記判定部は、非検知状態では前記交差角が相対的に大きい前記発光部のみを発光させる。そして、前記発光部が発光した状態で前記受光部の出力が閾値を超えると、前記判定部は、複数の前記検知領域の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で他の前記発光部を発光させることも好ましい。
【0020】
この煙感知器において、1つの前記発光部に対して、前記受光部が複数設けられ、複数の前記受光部がそれぞれ対応する検知領域からの光を受光することも好ましい。
【0021】
この煙感知器において、各々の前記受光部の光軸と前記発光部の光軸との為す交差角が互いに異なる角度に設定されることも好ましい。
【0022】
この煙感知器において、前記発光部の光軸及び複数の前記受光部の光軸を含む平面上で、複数の前記受光部が、前記発光部の光軸に対して同じ側に配置されることも好ましい。
【0023】
この煙感知器において、前記発光部の光軸及び複数の前記受光部の光軸を含む平面上で、複数の前記受光部が、前記発光部の光軸に対して両側に配置されたことも好ましい。
【0024】
この煙感知器において、前記判定部は、複数の前記受光部の出力を同時に取り込み、複数の前記受光部の出力をもとに、前記煙感知室内の状態を判定することも好ましい。
【0025】
この煙感知器において、前記判定部は、複数の前記受光部の出力を同時に取り込み、一部の前記受光部の出力が閾値を超え、且つ、他の前記受光部の出力が前記閾値よりも小さい場合、煙以外の異物が前記煙感知室内に進入したと判定することも好ましい。
【0026】
この煙感知器において、前記判定部は、複数の前記受光部の出力を同時に取り込み、全ての前記受光部の出力が閾値を超えた場合、前記煙感知室内に煙が進入したと判断することも好ましい。
【0027】
この煙感知器において、各々の前記受光部の光軸と前記発光部の光軸との為す交差角が互いに異なる角度に設定され、前記判定部は、前記受光部の出力と閾値との高低を比較することによって、前記煙感知室内に煙が進入したか否かを判定する。そして、前記交差角が相対的に大きい前記受光部の出力に対する、前記交差角が相対的に小さい前記受光部の出力の割合が、所定の基準値よりも大きくなると、前記判定部は、煙感知室内に進入した煙を黒煙と判別して、前記閾値を低下させることも好ましい。
【0028】
この煙感知器において、前記判定部は、前記煙感知室内に異物が進入したことを検知していない状態では複数の前記受光部のうち何れか1つの前記受光部のみを動作させて出力を取り込み、取り込んだ出力が閾値を超えると、他の前記受光部を動作させて出力を取り込むことも好ましい。
【発明の効果】
【0029】
本発明によれば、虫や埃による誤検知を低減した小型の煙感知器を提供することができる。
【図面の簡単な説明】
【0030】
【図1】実施形態1の煙感知器の要部を示す平面図である。
【図2】(a)は同上の受光部及び発光部の配置を模式的に示した説明図、(b)は粒子径の比較的大きな煙による散乱光のパワー分布を示す図、(c)は粒子径の比較的小さな煙による散乱光のパワー分布を示す図である。
【図3】(a)は同上の発光部及び受光部の配置を模式的に示した説明図であり、(b)は実施形態2の発光部及び受光部の配置を模式的に示した説明図である。
【図4】(a)(b)は同上の発光部及び受光部の配置を模式的に示した説明図である。
【図5】実施形態4の煙感知器の発光部及び受光部の配置を模式的に示した説明図である。
【図6】(a)(b)は同上の動作を説明するタイムチャートである。
【図7】同上の別の動作を説明するタイムチャートである。
【図8】同上のまた別の動作を説明するタイムチャートである。
【図9】同上の発光部及び受光部の配置を模式的に示した説明図である。
【図10】同上の煙濃度と散乱光強度の関係を示すグラフであり、(a)は黒煙の場合のグラフ、(b)は白煙の場合のグラフである。
【図11】同上の別の動作を説明するタイムチャートである。
【図12】同上のまた別の動作を説明するタイムチャートである。
【図13】同上の動作を説明するフローチャートである。
【図14】実施形態5の発光部及び受光部の配置を模式的に示した説明図である。
【図15】同上の動作を説明するタイムチャートである。
【発明を実施するための形態】
【0031】
本願の実施形態を図面に基づいて説明する。
【0032】
(実施形態1)
本願の実施形態1について図面を参照して説明する。
【0033】
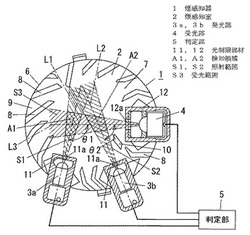
図1は煙感知器1の要部を模式的に示した平面図であり、この煙感知器1は、煙感知室2と、発光部3a,3bと、受光部4と、判定部5とを主要な構成として備えている。
【0034】
煙感知室2は横断面が円形状の光学基台6で構成される。光学基台6は、略円板状の底板7と、複数のラビリンス壁8とを備える。複数のラビリンス壁8は、底板7の外周部から底板7と略直交する方向に突出して、内側の空間を囲んでいる。隣接するラビリンス壁8の隙間9は、外部から煙感知室2内部へと煙が流入する出入口となっている。また、ラビリンス壁8の中間部には屈曲部が設けられており、外部から隙間9を通って入射した光を、ラビリンス壁8が外側へ向けて反射させることによって、外部からの光の進入を抑制している。尚、図1は模式図であり、ラビリンス壁8の形状や個数や配置は、外部からの光の進入を抑制しつつ、煙の流入を妨げないように適宜変更が可能である。また、煙感知室2には、発光部3a,3bと受光部4との間に、発光部3a,3bからの照射光が受光部4に直接入射しないように、直射光を遮光する遮光壁10が設けられている。
【0035】
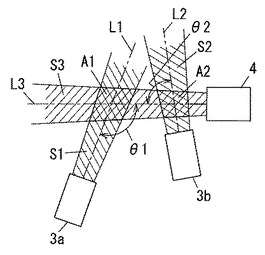
煙感知室2には、2つの発光部3a,3bと、1つの受光部4が配置されている。受光部4の光軸L3及び発光部3a,3bの光軸L1,L2は同じ平面上にあり、1つだけ設けられた受光部4の光軸L3に対して発光部3a,3bの光軸L1,L2がそれぞれ交差するように、発光部3a、3b及び受光部4が配置されている。
【0036】
発光部3aの光軸L1と受光部4の光軸L3とが交差する付近、すなわち照射光の照射範囲S1と受光光の受光範囲S3とが重なる検知領域A1に煙が流入すると、検知領域A1内の煙によって発光部3aの照射光が散乱され、散乱光の一部が受光部4に入射する。また発光部3bの光軸L2と受光部4の光軸L3とが交差する付近、すなわち照射光の照射範囲S2と受光光の受光範囲S3とが重なる検知領域A2に煙が流入すると、検知領域A2内の煙によって発光部3bの照射光が散乱され、散乱光の一部が受光部4に入射する。
【0037】
ここで、2つの検知領域A1,A2が重ならないように、照射光の照射範囲S1,S2を制限する光制限部材(所謂アパーチャ)11が発光部3a,3bとそれぞれ一体に設けられている。各発光部3a,3bの放射光は光制限部材11の開口11aを通して対応する検知領域A1,A2に照射されている。同様に、2つの検知領域A1,A2が重ならないよう、受光光の受光範囲S3を制限する光制限部材(所謂アパーチャ)12が受光部4と一体に設けられ、検知領域A1,A2からの光は光制限部材12の開口12aを通して受光部4に入射されるようになっている。尚、本実施形態では発光側及び受光側の両方に光制限部材11,12が設けられているが、必ずしも発光側及び受光側の両方に光制限部材11,12を設ける必要は無い。発光側及び受光側のうち何れか一方のみに光制限部材を設けることで、複数の検知領域が重ならないように光(照射光又は受光光の何れか)の範囲を制限できるのであれば、発光側及び受光側のうち何れか一方のみに光制限部材が設けられていてもよい。
【0038】
判定部5は、発光部3a,3bの発光を制御する機能と、受光部4の出力から煙の有無を判定する機能を備えている。判定部5では、発光部3a,3bを所定の時間間隔で交互に点灯させ、発光部3a又は発光部3bが点灯している状態で受光部4の受光量が所定の閾値を越えるか否かを判定する。そして、発光部3aの点灯時と発光部3bの点灯時の両方で受光部4の受光量が閾値を超えていれば、判定部5は煙感知室2内に煙が流入していると判定し、煙感知信号を外部に発報する。発光部3a,3bのうち一方の点灯時のみ受光部4の受光量が閾値を超えるが、他方の点灯時には受光部4の受光量が閾値を超えない場合、判定部5は煙感知室2内に煙が流入していないと判定する。また、発光部3aの点灯時と発光部3bの点灯時の両方で受光部4の受光量が閾値を超えていなければ、判定部5は煙感知室2内に煙が流入していないと判定する。
【0039】
ところで、煙感知室2内に虫や埃などが進入した場合、検知領域A1又は検知領域A2内に入り込んだ虫や埃によって散乱光が発生し、その散乱光を受光部4が受光する可能性はある。しかしながら、2つの検知領域A1,A2の両方に虫や埃が同時に進入する可能性は低いので、判定部5は、検知領域A1,A2の何れか一方のみで散乱光が検出された場合には煙と判定しない。尚、判定部5は、2つの検知領域A1,A2の間を煙以外の異物(虫や埃)が移動するのに必要な移動時間よりも短い時間間隔で発光部3a,3bを発光させている。したがって、煙以外の異物(虫や埃)が煙感知室2内に進入した場合には、発光部3aの発光時と発光部3bの発光時の両方で受光部4の出力が閾値を超えることはない。
【0040】
一方、火災などで発生した煙が煙感知室2に進入した場合は、検知領域A1,A2の両方に煙が流れ込むようにラビリンス壁8などで煙の流れを制御しているので、検知領域A1,A2の両方で散乱光が検出された場合のみ煙が存在すると判定部5が判定する。
【0041】
したがって、本実施形態の煙感知器1では煙以外の異物(例えば虫や埃など)による誤検知が起こりにくく、煙を確実に検出することができる。しかも、照射光の範囲を制限する光制限部材11は発光部3a,3bと一体に設けられ、受光光の範囲を制限する光制限部材12は受光部4と一体に設けられているので、発光部3a,3bや受光部4とは別体に光制限部材を設ける場合に比べて、煙感知器1を小型化できる。また光制限部材が発光部3a,3bや受光部4とは別体に設けられていると、光制限部材自体が迷光の原因となる可能性があるため、光制限部材が発光部3a,3bや受光部4とは別体に設けられた場合に比べて光学設計も容易である。
【0042】
また、1つの受光部4に対して発光部3a,3bが複数設けられ、複数の発光部3a,3bがそれぞれ対応する検知領域A1,A2に光を照射しているので、検知領域A1,A2の各々を受光部及び発光部の組で検知する場合に比べて、受光部4の数を削減できる。
【0043】
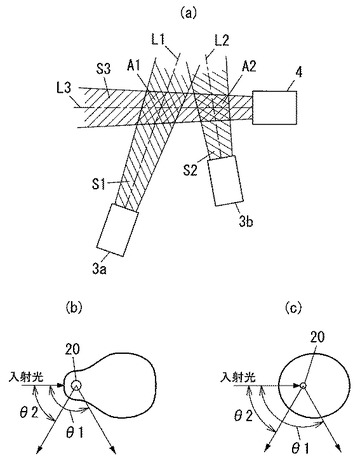
また、検知領域A1,A2のそれぞれで、発光部3aの光軸L1と受光部4の光軸L3のなす角度θ1と、発光部3bの光軸L2と受光部4の光軸L3のなす角度θ2が異なるように発光部3a,3b及び受光部4が配置されている。ここで、図1及び図2(a)に示すように、検知領域A1において発光部3aの光軸L1と受光部4の光軸L3のなす角度θ1は鈍角となり、検知領域A2において発光部3bの光軸L2と受光部4の光軸L3のなす角度θ2は鋭角となっている(θ1>θ2)。
【0044】
図2(b)(c)は煙の粒子20に光が当たった場合の散乱光のパワー分布を示しており、同図(b)は粒子径が比較的大きな煙の場合のパワー分布、同図(c)は粒子径が比較的小さな煙の場合のパワー分布をそれぞれ示している。この図から粒子径が大きい場合は前方への散乱成分が大きくなり、粒子径が小さい場合は前方への散乱成分が小さくなって、全方位に略均等に散乱されるパワー分布に近付くことが判る。
【0045】
したがって、入射光と散乱光とのなす角度が比較的大きい場合、すなわち発光部の光軸と受光部の光軸とのなす角度が比較的大きい場合は、粒子径の大小によって受光部からの出力信号の大きさが大きく変化することになる。そのため、粒子径が小さい煙の場合の出力信号は、粒子径が大きい煙の場合の出力信号との差が大きくなるが、粒子径の大きい煙に対してはより大きな出力信号が得られるので、ノイズの影響を受けることなく煙の存在を検知できる。
【0046】
一方、入射光と散乱光とのなす角度が比較的小さい場合、すなわち発光部の光軸と受光部の光軸とのなす角度が比較的小さい場合、入射光と散乱光とのなす角度が大きい場合に比べて出力信号の大きさが全体的に小さくなるものの、粒子径の大小によって出力信号の大きさがあまり変化しないため、粒子径の小さい煙でも検出しやすいという利点がある。
【0047】
本実施形態では2つの検知領域A1,A2のそれぞれで、発光部の光軸と受光部の光軸とのなす角度を異ならせており、発光部の光軸と受光部の光軸とのなす角度が相対的に大きい検知領域A1では信号レベルを大きくすることによってノイズの影響を低減し、粒子径の大きな煙を検出しやすくしている。また発光部の光軸と受光部の光軸とのなす角度が相対的に小さい検知領域A2では、粒子径の大小によって発生する信号レベルの差が小さくなるから、粒子径が比較的小さい煙を検知しやすくなる。
【0048】
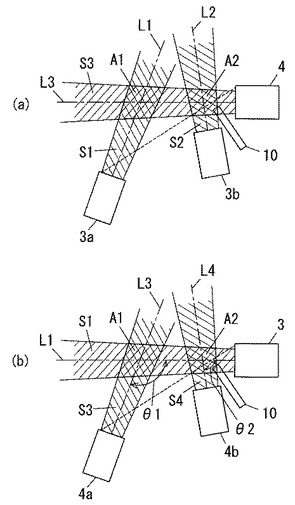
また本実施形態では、図3(a)に示すように、発光部3a,3b及び受光部4の光軸L1,L2,L3を含む平面(底板7と平行な平面)において、複数設けられた発光部3a,3bが、1つだけ設けられた受光部4の光軸L3に対して同じ側に配置されている。
【0049】
これにより、発光部3aからの放射光、発光部3bからの放射光がそれぞれ受光部4に直接入射するのを遮光する遮光壁10(遮光部材)が1つで済むから、迷光が発生する原因となる遮光壁10を複数設ける必要がなく、光学的な設計を容易に行うことができる。
【0050】
(実施形態2)
本願の実施形態2を図面に基づいて説明する。
【0051】
実施形態1では、検知領域を複数設けるために1つの受光部4に対して複数の発光部3a,3bを設けているが、本実施形態では図3(b)に示すように1つの発光部3に対して複数の受光部4a,4bを設けることによって複数の検知領域A1,A2を設定する。
【0052】
この場合、煙感知室2内に煙が流入し、発光部3の光軸L1と受光部4aの光軸L3とが交差する付近、すなわち照射光の照射範囲S1と受光光の受光範囲S3とが重なる検知領域A1に煙が流入すると、検知領域A1内の煙によって照射光が散乱され、散乱光の一部が受光部4aに入射する。また発光部3の光軸L1と受光部4bの光軸L4とが交差する付近、すなわち照射光の照射範囲S1と受光光の受光範囲S4とが重なる検知領域A2に煙が流入すると、検知領域A2内の煙によって照射光が散乱され、散乱光の一部が受光部4bに入射する。
【0053】
ここで、2つの検知領域A1,A2が重ならないよう、実施形態1と同様に、発光部3が光を照射する照射範囲を制限する光制限部材(図示せず)と、受光部4a,4bが光を受光する受光範囲をそれぞれ制限する光制限部材(図示せず)とが設けられている。すなわち、発光部3と一体に照射光の照射範囲S1を制限する光制限部材が設けられ、発光部3の放射光は光制限部材の開口を通して検知領域A1,A2に照射される。また、受光部4a,4bとそれぞれ一体に受光光の受光範囲S3,S4を制限する光制限部材(図示せず)が設けられ、受光部4a,4bにはそれぞれ一体に設けられた光制限部材の開口を通して対応する検知領域A1,A2からの光が入射されている。
【0054】
この煙感知器1では、判定部5が発光部3の発光を制御するとともに、受光部4a,4bを動作させてその出力を取り込み、受光部4a,4bの出力をもとに煙の有無を感知する。判定部5は、発光部3を点灯させたときの受光部4a,4bの出力信号が両方共に所定の閾値を超えると、煙感知室2内に煙が存在すると判定し、煙感知信号を外部に出力する。また判定部5は、発光部3を点灯させたときの受光部4a,4bの出力信号が両方共に閾値を超えない場合や、受光部4a,4bのうち一方のみの出力信号しか閾値を超えない場合は煙が存在しないと判定する。これにより、煙感知室2内に進入した虫や埃などを煙と誤検出する可能性を低減できる。また、光の範囲を制限する光制限部材が発光部3及び受光部4a,4bと一体に設けられているので、発光部3や受光部4a,4bとは別体に光制限部材を設ける場合に比べて、煙感知器1を小型化でき、光学設計も容易になる。
【0055】
上述のように複数の検知領域A1,A2を設けるために、1つの発光部3に対して複数の受光部4a,4bが設けられているので、検知領域A1,A2の各々を受光部及び発光部の組で検知する場合に比べて、発光部3の数を削減でき、コストダウンが図られる。また、1つの受光部に対して複数の発光部を設けた場合は、発光部を1個ずつ点灯させることによって、検知領域A1,A2の各々で煙の有無を検出する必要があるが、1つの発光部3に対して複数の受光部4a,4bを設けているので、検知領域A1,A2での煙の有無を同時に検出することができる。
【0056】
(実施形態3)
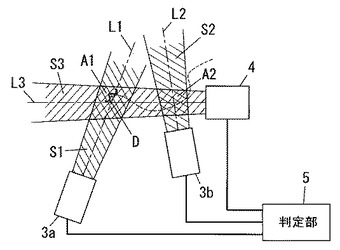
上述の実施形態1,2では、発光部及び受光部の光軸を含む平面上で、複数設けられた発光部又は受光部が、1つだけ設けられた受光部又は発光部の光軸に対して同じ側に配置されているが、図4に示すように、複数設けられた発光部又は受光部が、1つだけ設けられた受光部又は発光部の光軸に対して両側に配置されていてもよい。
【0057】
図4(a)の配置例では、1つの受光部4に対して2つの発光部3a,3bが設けられ、発光部3a,3b及び受光部4の光軸L1,L2,L3を含む平面上で、複数設けられた発光部3a,3bが、1つだけ設けられた受光部4の光軸L3に対して両側に配置されている。すなわち、2つの発光部3a,3bは、それぞれの光軸L1,L2が略平行になるように、光軸L3を挟んで斜向かいに配置されている。発光部3aの光軸L1と受光部4の光軸L3とが交差する付近、すなわち照射光の照射範囲S1と受光光の受光範囲S3とが重なる検知領域A1に煙が流入すると、検知領域A1内の煙によって照射光が散乱され、散乱光の一部が受光部4に入射する。また発光部3bの光軸L2と受光部4の光軸L3とが交差する付近、すなわち照射光の照射範囲S2と受光光の受光範囲S3とが重なる検知領域A2に煙が流入すると、検知領域A2内の煙によって照射光が散乱され、散乱光の一部が受光部4に入射する。上述の実施形態1と同様に、2つの検知領域A1,A2が重ならないように、照射光の照射範囲S1を制限する光制限部材(図示せず)が発光部3a,3bとそれぞれ一体に設けられている。各発光部3a,3bの放射光は光制限部材の開口を通して対応する検知領域A1,A2に照射される。また、2つの検知領域A1,A2が重ならないよう、受光光の受光範囲S3を制限する光制限部材(図示せず)が受光部4と一体に設けられており、検知領域A1,A2からの光は光制限部材の開口を通して受光部4に入射される。
【0058】
ここで、煙感知室2内に虫や埃などが進入した場合、検知領域A1又は検知領域A2内に入り込んだ虫や埃によって散乱光が発生し、その散乱光を受光部4が受光する可能性はある。しかしながら、2つの検知領域A1,A2の両方に虫や埃が同時に進入する可能性は低いので、判定部5は、検知領域A1,A2の何れか一方のみで散乱光が検出された場合には煙と判定しない。一方、火災などで発生した煙が煙感知室2に進入した場合は、検知領域A1,A2の両方に煙が流れ込むようにラビリンス壁8などで煙の流れを制御しているので、検知領域A1,A2の両方で散乱光が検出された場合のみ煙が存在すると判定部5が判定する。これにより、虫や埃などによる誤検知が起こりにくく、煙を確実に検出することができる。また、光の範囲を制限する光制限部材が発光部3a,3b及び受光部4と一体に設けられているので、発光部3a,3bや受光部4とは別体に光制限部材を設ける場合に比べて、煙感知器1を小型化できる。また、迷光の原因となる光制限部材が発光部3a,3bや受光部4とは別体に設けられている場合に比べて光学設計も容易である。尚、本実施形態では発光側および受光側の両方に光制限部材が設けられているが、複数の検知領域が重ならないように、光(照射光又は受光光の何れか)の範囲を制限できるのであれば、発光側及び受光側のうち何れか一方のみに光制限部材が設けられていてもよい。
【0059】
ここで、2つの発光部3a,3bの光軸L1,L2は略平行であり、受光部4の光軸L3に対して斜めに交差しているので、発光部3aの光軸L1と受光部4の光軸L3とのなす角度θ1と、発光部3bの光軸L2と受光部4の光軸L3とのなす角度θ2とは互いに異なっている。すなわち、2つの検知領域A1,A2のそれぞれで、発光部の光軸と受光部の光軸とのなす角度θ1,θ2が互いに異なっている。これにより、発光部の光軸と受光部の光軸とのなす角度が相対的に大きい検知領域A1では粒子径の大きい煙を検出しやすく、発光部の光軸と受光部の光軸とのなす角度が相対的に小さい検知領域A2では粒子径の小さい煙を検出しやすくなる。
【0060】
図1及び図3に示すように、受光部4の光軸L3に対して同じ側に2つの発光部3a,3bが配置された場合、2つの検知領域A1,A2で受光側の光軸と発光側の光軸とがなす角度を異ならせようとすると、発光部3aの光軸L1に対して発光部3bの光軸L2が斜めに交差するように配置されるから、2つの検知領域A1,A2の間に無駄なスパースができる。それに対して、図4(a)に示すように2つの発光部3a,3bが光軸L3の両側に配置されていれば、互いの光軸が平行するように発光部3a,3bが配置されることによって、検知領域A1,A2で受光側の光軸と発光側の光軸とのなす角度を異ならせることができる。したがって、2つの発光部3a,3bは互いに近接させて配置することができ、検知領域A1,A2の間にできる無駄なスペースが小さくなり、全体として小型化を図ることができる。
【0061】
尚、図4(a)の配置例では1つの受光部4に対して2つの発光部3a,3bを配置しているが、図4(b)に示すように1つの発光部3に対して2つの受光部4a,4bを設けてもよく、上述と同様、検知領域A1,A2の間にできる無駄なスペースを小さくし、全体として小型化を図ることができる。
【0062】
以上説明したように、煙感知器は、煙感知室と、発光部と、受光部とを備える。煙感知室は、外部からの光の進入を抑制し、且つ、煙の出入りを許容する。発光部は煙感知室内の複数(上述の実施形態では2つ)の検知領域に光を照射する。受光部には、発光部からの直接光は入射せず、それぞれの検知領域に流入した煙による散乱光が入射する。そして、発光部及び受光部のうち少なくとも何れか一方と一体に、複数の検知領域が重ならないように光の範囲を制限する光制限部材が設けられたことを特徴とする。
【0063】
これにより、受光部によって複数の検知領域の一部のみで散乱光が検出された場合は煙ではなく、虫や埃によるものと判定でき、虫や埃による誤検知を低減できる。さらに、複数の検知領域が重ならないように光の範囲を制限する光制限部材は受光部及び発光部のうち少なくとも何れか一方と一体に設けられているので、受光部又は発光部とは別体に光制限部材が設けられた場合に比べて、光制限部材を小さくできるから煙感知器1の小型化が図れる。また、迷光の原因となる光制限部材が受光部又は発光部と別体に設けられた場合に比べて光学的な設計が容易になる。
【0064】
この煙感知器において、1つの受光部に対して、発光部が複数設けられ、複数の発光部がそれぞれ対応する検知領域に光を照射することも好ましい。
【0065】
これにより、複数の検知領域の各々を受光部及び発光部の組で検知する場合に比べて、受光部の数を削減でき、コストダウンを図ることができる。
【0066】
この煙感知器において、1つの発光部に対して、受光部が複数設けられ、複数の受光部がそれぞれ対応する検知領域からの光を受光することも好ましい。
【0067】
これにより、複数の検知領域の各々を受光部及び発光部の組で検知する場合に比べて、発光部の数を削減でき、コストダウンを図ることができる。また、1つの受光部に対して複数の発光部を設けた場合は、発光部を1個ずつ点灯させることによって、各検知領域での煙の有無を検出する必要があるが、1つの発光部に対して複数の受光部を設けているので、複数の検知領域での煙の有無を同時に検出することができる。
【0068】
この煙感知器において、複数の検知領域のそれぞれで、発光部の光軸と受光部の光軸とのなす角度が互いに異なることも好ましい。
【0069】
上述のように、煙による光の散乱特性は粒子径によって変化し、粒子径が大きいほど前方への散乱成分が大きくなり、粒子径が小さいほど前方への散乱成分が小さくなって、散乱方向による散乱成分の差が小さくなる傾向がある。複数の検知領域のそれぞれで、発光部の光軸と受光部の光軸とのなす角度を互いに異ならせた場合、発光部の光軸と受光部の光軸とのなす角度が相対的に大きい検知領域では、粒子径の大きい煙による散乱成分を大きくすることで、受光部の出力レベルを大きくして、粒子径の大きい煙を検知しやすくできる。また、発光部の光軸と受光部の光軸とのなす角度が相対的に小さい検知領域では、粒子径の大きい煙による散乱成分と粒子径の小さい煙による散乱成分との差が小さくなるので、粒子径の小さい煙を検知しやすくなる。したがって、複数の検知領域のそれぞれで、発光部の光軸と受光部の光軸とのなす角度を互いに異ならせることによって、粒子径が相対的に大きい煙或いは粒子径が相対的に小さい煙を検知しやすくできる。
【0070】
また、この煙感知器において、発光部及び受光部のうちの何れか一方が複数設けられ、発光部及び受光部の光軸を含む平面上で、複数設けられた発光部又は受光部が、1つだけ設けられた受光部又は発光部の光軸に対して同じ側に配置されることも好ましい。
【0071】
これにより、発光部からの照射光が受光部に直接入射するのを遮光する遮光部材を、1つだけ設けられた受光部又は発光部の光軸に対して片側のみに設ければよいという利点がある。
【0072】
この煙感知器において、発光部及び受光部のうちの何れか一方が複数設けられ、発光部及び受光部の光軸を含む平面上で、複数設けられた発光部又は受光部が、1つだけ設けられた受光部又は発光部の光軸に対して両側に配置されることも好ましい。
【0073】
複数設けられた発光部又は受光部が、1つだけ設けられた受光部又は発光部の光軸に対して同じ側に配置された場合、複数の検知領域で発光部の光軸と受光部の光軸とのなす角度を異ならせるためには、複数設けられた発光部又は受光部の光軸を互いに交差させるように配置しなければならず、複数の検知領域の間に無駄がスペースができてしまう。それに対して、複数設けられた発光部又は受光部が、1つだけ設けられた受光部又は発光部の光軸の両側に配置される場合、複数設けられた発光部又は受光部の光軸を互いに平行するように配置すればよいから、複数の検知領域の間にできる隙間を小さくでき、全体として煙感知器の小型化を図ることができる。
【0074】
(実施形態4)
本実施形態の煙感知器1は、実施形態1で説明した煙感知器1と同様の構成を有しているので、その説明は省略する。
【0075】
本実施形態では、図5に示すように、1つの受光部4に対して2つの発光部3a,3bを備え、発光部3a,3bによる照射範囲S1,S2と受光部4の受光範囲S4とが重なる領域をそれぞれ検知領域A1,A2としている。
【0076】
判定部5は、発光部3a,3bの発光を制御する機能と、受光部4の出力から煙の有無を判定する機能を備えている。判定部5は、複数(本実施形態では2個)の発光部3a,3bを同時に発光させず、発光部3a,3bの各々を個別に発光させた状態での受光部4の出力をもとに、煙感知室2内の状態を判定している。
【0077】
これにより、複数の検知領域毎に発光部と受光部の組を設ける必要が無く、1つの受光部4で複数の検知領域の状態を監視することができる。
【0078】
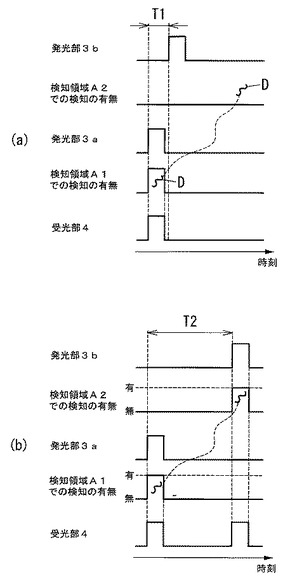
また判定部5は、複数の検知領域A1,A2の間を煙以外の異物(例えば埃や虫など)が移動するのに必要な移動時間よりも短い時間間隔で、各検知領域A1,A2に対応する発光部3a,3bを発光させている。そして、判定部5は、何れかの発光部(発光部3a又は発光部3b)を発光させた状態での受光部4の出力が閾値を超え、且つ、別の発光部(発光部3b又は発光部3a)を発光させた状態での受光部4の出力が閾値よりも小さい場合、煙以外の異物が煙感知室2内に進入したと判断する。
【0079】
図5に示すように、外部より煙感知室2に進入した埃Dが検知領域A1から検知領域A2に移動する場合を考える。発光部3a,3bの発光間隔が、検知領域A1,A2間を煙以外の異物が移動するのに必要な移動時間より長い時間T2に設定されていると、図6(b)に示すように発光部3aの点灯時と発光部3bの点灯時の両方で受光部4の出力が閾値を超える可能性がある。この場合、判定部5は、発光部3aの点灯時と発光部3bの点灯時の両方で受光部4の出力が閾値を超えることから、煙感知室2内に煙が進入したと誤検出してしまう。そこで、発光部3a,3bの発光間隔を、検知領域A1,A2間を煙以外の異物が移動するのに必要な移動時間より短い時間に設定するのが好ましい。図6(a)に示すように、発光部3a,3bの発光間隔が上記の移動時間より短い時間T1に設定されていれば、発光間隔T1が経過するまでの間に埃Dが検知領域A1内に移動することはできない。したがって、検知領域A1内に埃Dが進入したために、発光部3aの発光時における受光部4の出力が閾値を超えたとしても、発光間隔T1が経過するまでの間に埃Dが検知領域A2に移動することはできないため、発光部3bの発光時における受光部4の出力が閾値を超えることはない。したがって、煙感知室2の内部に煙以外の異物(埃や虫など)が進入した場合には、発光部3aの発光時と発光部3bの発光時の両方で受光部4の出力が閾値を超えないようにすることができ、煙が進入したと判定部5が誤検出する可能性を低減できる。
【0080】
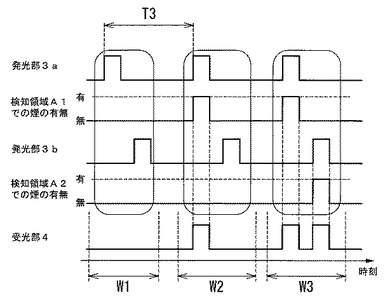
また判定部5は、複数の検知領域A1,A2の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で対応する発光部3a,3bを発光させている。そして、判定部5は、複数の発光部3a,3bの各々を個別に発光させた状態での受光部4の出力が全て閾値を超えた場合、煙感知室2内に煙が進入したと判断する。
【0081】
図7の期間W1では、発光部3a,3bの発光時に、検知領域A1,A2内に異物が進入しておらず、受光部4の出力は閾値よりも低いため、判定部5は、煙感知室2の内部に煙や、虫・埃などの異物が進入していないと判定する。また期間W2では、発光部3aの発光時には、検知領域A1内に異物が進入しているため、受光部4の出力が閾値を超えるが、発光部3bの発光時には検知領域A2内に異物が進入していないため、受光部4の出力は閾値を下回っている。よって、判定部5は、一方の発光部3aの発光時のみ受光部4の出力が閾値を超えているから、煙感知室2内に煙以外の異物(埃や虫など)が進入していると判定する。また期間W3では、発光部3a,3bの両方の発光時に受光部4の出力が閾値を超えており、この場合、判定部5は煙感知室2内に煙が進入していると判定する。火災に伴う煙が煙感知室2内に進入した場合、煙感知室2の内部に略均一に煙が存在するから、判定部5は、発光部3a,3bを個別に発光させた状態での受光部4の出力が全て閾値を超えた場合、煙感知室2内に煙が進入したと判断しており、誤検出を低減できる。
【0082】
また判定部5は、図7に示すように、複数の発光部3a,3bを所定の周期T3で間欠的に発光させて、発光部3a,3bの発光時における受光部4の出力から判定動作を行っており、発光部3a,3bを点灯させ続けた場合に比べて、消費電力を低減できる。
【0083】
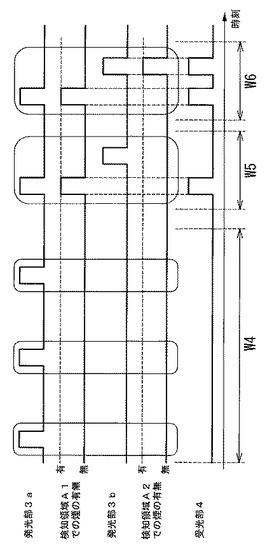
また判定部5が、煙感知室2内に異物が進入したことを検知していない状態では何れか1つの発光部3aのみを発光させ、発光部3aが発光した状態で受光部4の出力が閾値を超えると、他の発光部3bを発光させることも好ましい。ここで、発光部3bを発光させる際に、判定部5は、検知領域A1,A2の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で発光部3bを発光させている。
【0084】
煙感知室2の内部に煙が進入した場合は検知領域A1,A2の両方で煙が検出されるので、一方の発光部3aを発光させた際に受光部4の出力が閾値を超えていなければ、煙感知室2の内部に煙が進入していないと判断できる。したがって、図8に示すように、判定部5は、煙を検知していない期間W4では、何れか1つの発光部(例えば発光部3a)のみを発光させ、発光部3aの発光時に受光部4の出力が閾値を超えた場合(期間W5,W6)は他の発光部3bも発光させている。そして、発光部3bの発光時に受光部4の出力が閾値を超えていなければ(期間W5)、判定部5は煙以外の異物が進入したと判定し、発光部3bの発光時に受光部4の出力が閾値を超えると(期間W6)、判定部5は煙が進入したと判定する。このように、煙や埃・虫などの異物を検知していない非検知状態では何れか1つの発光部のみを発光させることで、省電力を図ることができる。また、発光部3aを発光させた状態で受光部4の出力が閾値を超えると、判定部5は、他の発光部3bを発光させて受光部4の出力を取り込み、その出力に基づいて煙が進入したか否かを判定しているので、煙や虫などの異物を煙と誤検知する可能性を低減できる。
【0085】
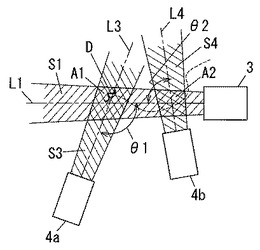
ところで、図9に示すように各々の発光部3a,3bの光軸L1,L2と受光部4の光軸L3とが為す交差角θ1,θ2は互いに異なる角度に設定されている。図9の配置では、発光部3aの光軸L1と受光部4の光軸L3とが為す交差角θ1に比べて、発光部3bの光軸L2と受光部4の光軸L3とが為す交差角θ2の方が小さくなっている(θ1>θ2)。
【0086】
実施形態1で説明したように、煙の粒子に光が当たった場合、粒子径の大小によって散乱光のパワー分布が異なることが判明している。また、火災の初期時に発生する白煙(燻煙)は、燃焼の拡大時に発生する黒煙に比べて、煙の粒子径が大きくなっている。したがって、白煙による散乱光のパワー分布は、図2(b)に示すように前方への散乱成分が大きくなるようなパワー分布となり、黒煙による散乱光のパワー分布は、図2(c)に示すように全方位に略均等に散乱されるパワー分布となる。また、黒煙の場合は白煙に比べて光の減衰率が大きいため、煙濃度が同じであれば、受光部4に入射する散乱光強度は、白煙に比べて黒煙の方が小さくなる。
【0087】
図10(a)は黒煙が進入した場合に受光部4に入射する散乱光強度と煙濃度との関係を示し、図10(b)は白煙が進入した場合に受光部4に入射する散乱光強度と煙濃度との関係を示している。また図10(a)(b)中の特性Eは、交差角が相対的に大きい発光部3aが発光した状態での散乱光強度を示し、図(a)(b)中の特性Fは、交差角が相対的に小さい発光部3bが発光した状態での散乱光強度を示している。
【0088】
ここで、白煙の場合には、交差角が鈍角となる発光部3aの発光時に比べ、交差角が鋭角となる発光部3bの発光時の方が、受光部4に入射する散乱光強度が大幅に小さくなっている。一方、黒煙の場合には、白煙の場合に比べて、交差角による散乱光強度の変化が小さいため、発光部3aの発光時と発光部3bの発光時とで、受光部4に入射する散乱光強度の差は、白煙の場合よりも小さくなっている。したがって、煙濃度がX1の時に、白煙の場合は、発光部3aの発光状態での受光部4の出力c4に対する、発光部3bの発光状態での受光部4の出力c3の割合は(c3/c4)となる。一方、煙濃度がX1の時に、黒煙の場合は、発光部3aの発光状態での受光部4の出力c2に対する、発光部3bの発光状態での受光部4の出力c1の割合は(c1/c2)となり、白煙の場合の割合(c3/c4)に比べて大きくなっている。
【0089】
このことから、判定部5では、交差角が相対的に大きい発光部3aが発光した状態での受光部4の出力に対する、交差角が相対的に小さい発光部3bが発光した状態での前記受光部の出力の割合と、所定の基準値との大小を比較する。そして、上記の割合が基準値よりも大きくなると、判定部5は煙感知室2内に黒煙が進入していると判別しており、煙感知室2内に進入した煙の種類(白煙であるか黒煙であるか)を判別することができる。そして、黒煙と判別された場合、黒煙の進入時は白煙の進入時に比べて受光部4に入射する光量が低下するので、判定部5は、煙の有無を判定するための閾値を低下させており、受光部4の出力が低下する黒煙の場合でも煙の存在を確実に検出することができる。
【0090】
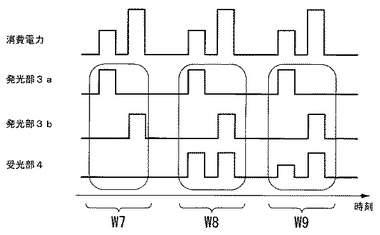
また判定部5では、交差角が相対的に小さい発光部3bの発光時間及び発光光量のうち少なくとも何れか一方を、交差角が相対的に大きい発光部3aよりも大きくすることも好ましい。交差角が相対的に小さい発光部3bでは、交差角が相対的に大きい発光部3aに比べて煙による散乱成分が小さくなるため、白煙の流入時における受光部4の出力が小さくなると考えられる。したがって、判定部5では、発光部3bの発光時間及び発光光量のうち少なくとに何れか一方を、発光部3aよりも大きくしており、これによって発光部3bの発光時における受光部4の出力を大きくできるから、煙の検出漏れを低減できる。
【0091】
この場合の動作を図11に基づいて説明する。図11の例では、交差角が小さいために、発光部3aに比べて出力が小さくなる発光部3bへの供給電力を大きくすることで、発光部3bの発光光量を大きくしている。
【0092】
図11の期間W7では煙感知室2の内部に煙などの異物が進入していないため、発光部3a,3bの点灯時には受光部4から信号は出力されない。
【0093】
図11の期間W8では煙感知室2の内部に白煙が進入しており、白煙の場合には交差角が小さい方が交差角が大きい場合に比べて散乱光成分は低下するが、交差角の小さい発光部3bの発光量を発光部3aよりも大きくすることで、発光部3aの発光時と発光部3bの発光時とで受光部4の出力を略同じ大きさにしている。
【0094】
図11の期間W9では煙感知室2の内部に黒煙が進入しており、黒煙の場合は交差角によって散乱光成分の大きさがあまり変化しないため、発光部3bの発光量を増加させた分だけ、発光部3aの発光時における受光部4の出力に比べて、発光部3aの発光時における受光部4の出力が大きくなっている。尚、黒煙の場合は白煙に比べて光の減衰量が大きいため、発光部3aの発光時における受光部4の出力は、白煙の進入時に比べて黒煙の進入時の方が低下している。
【0095】
このように、交差角が小さい発光部3bの発光量(発光時間又は発光光量)を大きくすることで、交差角による散乱光成分の大きさが変化する白煙の場合にも、発光部3bの発光時における受光部4の出力を大きくでき、煙の検知漏れを抑制することができる。
【0096】
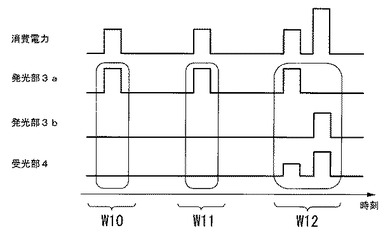
また、煙感知室2の内部に煙や埃・虫などの異物が進入したことを検知していない非検知状態では、判定部5は、図8に示すように何れか1つの発光部を発光させているのであるが、交差角が相対的に小さい発光部3aのみを発光させることが好ましい。複数ある発光部3a,3bの内の1つだけを発光させることで、電力消費を低減できる。また図11に示すように発光部3bの発光量を大きくしている場合には、発光量の小さい発光部3aのみを発光させることにより、電力消費をさらに低減できる。
【0097】
この場合の動作を図12に基づいて説明する。図12の期間W10,W11では煙感知室2内に煙が進入しておらず、発光部3aの発光時における受光部4の出力は閾値よりも小さいため、判定部5は、煙が進入していないと判断し、発光部3bを点灯させていない。一方、図12の期間W12では煙感知室2の内部に黒煙が進入しており、判定部5は、発光部3aの発光時における受光部4の出力が閾値を超えることから、発光部3bを発光させ、発光部3bの発光時における受光部4の出力が閾値を超えていれば、煙が進入したと判定する。
【0098】
このように、非検知状態では判定部5が発光部3aのみを点灯させているので、消費電力を低減することができる。また、発光部3aに比べて交差角が小さい発光部3bの発光量を発光部3aよりも大きくしている場合は、非検知状態において発光量の小さい発光部3aのみを点灯させることで、消費電力をさらに低減することができる。また、発光部3aのみを点灯させた状態で受光部4の出力が閾値を超えると、判定部5は、複数の発光部3a,3bを別個に点灯させ、発光部3a,3bをそれぞれ点灯させた状態での出力部4の出力をもとに煙が存在するか否かを判定しているので、煙の存否を確実に検出することができる。
【0099】
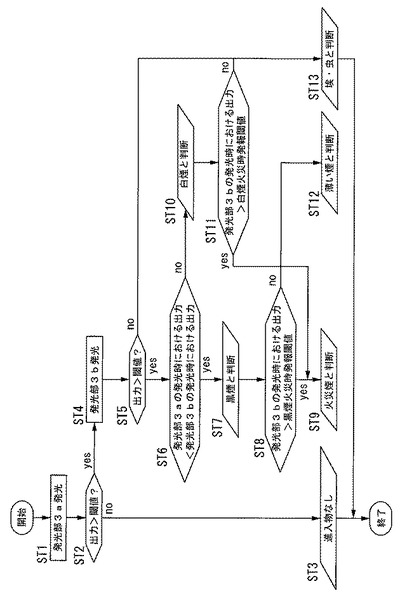
ここで、以上の動作をまとめると図13に示すようなフローチャートで表される。判定部5は、先ず、受光部4の光軸と為す交差角θ1が相対的に大きい発光部3aを発光させ(ステップST1)、この時の受光部4の出力を所定の閾値と比較することで、異物の進入を検知したか否かを判定する(ステップST2)。ここで、受光部4の出力が所定の閾値よりも小さければ(ステップST2のno)、判定部5は、煙感知室2の内部に何も進入していないと判定する(ステップST3)。一方、受光部4の出力が所定の閾値よりも大きければ(ステップST2のyes)、判定部5は、煙感知室2の内部に何かが進入したと判定して、発光部3bを発光させ(ステップST4)、この時の受光部4の出力を所定の閾値と比較する(ステップST5)。
【0100】
ここで、受光部4の出力が閾値を超えていれば(ステップST5のyes)、判定部5は、発光部3aの発光時における受光部4の出力と、発光部3bの発光時における受光部4の出力との高低を比較する(ステップST6)。そして、発光部3bの発光時における受光部4の出力が、発光部3aの発光時における受光部4の出力よりも小さければ(ステップST6のyes)、判定部5は、煙感知室2内に黒煙が進入したと判定する(ステップST7)。さらに、判定部5は、発光部3bの発光時における受光部4の出力と、黒煙火災時の発報閾値との高低を比較する(ステップST8)。ここで、受光部4の出力が黒煙火災時の発報閾値を超えていれば(ステップST8のyes)、判定部5は煙感知室2内に火災による煙が進入したと判定する(ステップST9)。また、受光部4の出力が黒煙火災時の発報閾値よりも小さければ(ステップST8のno)、判定部5は煙感知室2内に薄い煙が進入したと判定する(ステップST12)。
【0101】
また、ステップST6の判定において、発光部3bの発光時における受光部4の出力が、発光部3aの発光時における受光部4の出力よりも大きければ(ステップST6のno)、判定部5は、煙感知室2内に白煙が進入したと判定する(ステップST10)。さらに、判定部5は、発光部3bの発光時における受光部4の出力と、白煙火災時の発報閾値との高低を比較し(ステップST11)、受光部4の出力が白煙火災時の発報閾値を超えていれば(ステップST11のyes)、火災による煙と判定する(ステップST9)。また、ステップST11の判定において、発光部3bの発光時における受光部4の出力が、発光部3aの発光時における受光部4の出力よりも大きければ(ステップST11のno)、煙以外の異物(埃や虫など)が煙感知室2の内部に進入したと判定する(ステップST13)。また、ステップST5の判定において、受光部4の出力が閾値以下であれば、煙以外の異物(埃や虫など)が煙感知室2の内部に進入したと判定する(ステップST13)。
【0102】
(実施形態5)
本実施形態の煙感知器1は、実施形態2で説明した煙感知器1と同様の構成を有しているので、その説明は省略する。
【0103】
本実施形態では、図14に示すように、1つの発光部3に対して2つの受光部4a,4bを備え、受光部4a,4bの受光範囲S3,S4と発光部3による照射範囲S1とがそれぞれ重なる領域をそれぞれ検知領域A1,A2としている。
【0104】
判定部5は、発光部3の発光を制御する機能と、受光部4a,4bの出力から煙の有無を判定する機能を備えている。判定部5は、発光部3を発光させた状態で、受光部4a,4bを同時に動作させて、受光部4a,4bの出力を同時に取り込み、受光部4a,4bの出力に基づいて、煙感知室2内の状態を判定する。
【0105】
すなわち、本実施形態では1つの発光部3に対して、複数の受光部4a,4bが設けられ、複数の受光部4a,4bがそれぞれ対応する検知領域A1,A2からの光を受光している。これにより、複数の検知領域毎に発光部と受光部の組を設ける必要が無く、1つの発光部3で複数の検知領域A1,A2の状態を監視することができる。
【0106】
ここにおいて、本実施形態では、複数の受光部4a,4b及び発光部3の光軸を含む平面上で、複数の受光部4a,4bが、発光部3の光軸に対して同じ側に配置されている。
【0107】
これにより、発光部3からの放射光が受光部4a,4bに直接入射するのを遮光する遮光壁が1つで済むから、迷光が発生する原因となる遮光壁を複数設ける必要がなく、光学的な設計を容易に行うことができる。
【0108】
なお、実施形態3で説明したように、複数の受光部4a,4b及び発光部3の光軸を含む平面上で、複数の受光部4a,4bが、発光部3の光軸に対して両側に配置されることも好ましい。
【0109】
複数の受光部4a,4bが、発光部3の光軸に対して両側に配置されていれば、互いの光軸が平行するように受光部4a,4bが配置されることによって、検知領域A1,A2で受光側の光軸と発光側の光軸とのなす角度を異ならせることができる。したがって、検知領域A1,A2で受光側の光軸と発光側の光軸との為す角度を異ならせたい場合でも、複数の受光部4a,4bを互いに近接させて配置でき、検知領域A1,A2の間にできる無駄なスペースが小さくなり、全体として小型化を図ることができる。
【0110】
また、判定部5は、複数の受光部4a,4bの出力を同時に取り込み、複数の受光部4a,4bの出力をもとに、煙感知室2内の状態を判定しており、1つの発光部3で複数の検知領域A1,A2の状態を監視することができる。
【0111】
ここで、判定部5は、複数の受光部4a,4bの出力を同時に取り込み、一部の受光部の出力が閾値を超え、且つ、他の受光部の出力が閾値よりも小さい場合、煙以外の異物が煙感知室2内に進入したと判定する。
【0112】
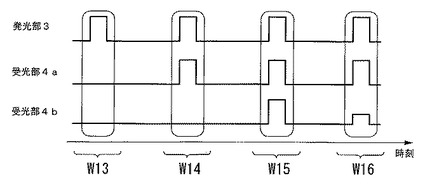
煙感知室2の内部に煙が進入した場合は全ての受光部4a,4bの出力が増加すると予想されるが、煙感知室2の内部に埃や虫などが進入した場合、複数の検知領域A1,A2に埃や虫が同時に進入する可能性は低いと予想される。例えば図15の期間W14のように受光部4aの出力のみ閾値を超え、受光部4bの出力が閾値よりも小さい場合、判定部5は、煙以外の異物(埃や虫など)が煙感知室2内に進入したと判定しており、煙が進入したと誤判定する可能性を低減できる。
【0113】
なお、図15の期間W13のように受光部4a,4bの出力が何れも閾値より低い場合、同時に取り込んだ受光部4a,4bの出力が閾値を下回っていることから、判定部5は、煙感知室2の内部に何も進入していないと判定する。
【0114】
また、図15の期間W15,W16のように、同時に取り込んだ受光部4a,4bの出力が何れも閾値を超えた場合、判定部5は、煙感知室2の内部に煙が進入したと判定する。
【0115】
ここで、受光部4aの光軸と発光部3の光軸とが為す角度θ1と、受光部4bの光軸と発光部3の光軸とが為す角度θ2とが互いに異なるように、発光部3及び受光部4a,4bが配置されている。本実施形態では、受光部4aの光軸と発光部3の光軸とが為す角度θ1に比べて、受光部4bの光軸と発光部3の光軸とが為す角度θ2の方が小さくなっている。粒子径が比較的大きい白煙が煙感知室2の内部に進入した場合に、交差角が小さい受光部4bでは、交差角が大きい受光部4aに比べて入射光量が小さくなるが、本実施形態では受光部4bの感度を受光部4aの感度よりも高めに設定しているので、期間W15では受光部4aの出力と受光部4bの出力がほぼ同じになっている。一方、黒煙が進入した場合には、受光部4a,4bの入射光量が略同じになるので、受光部4bの感度を高めに設定している分だけ、期間W16では受光部4bの出力の方が大きくなっている。
【0116】
これにより、受光部4aの出力と受光部4bの出力が略同じ大きさとなる期間W15では、交差角が相対的に大きい受光部4aの出力に対する、交差角が相対的に小さい受光部4bの出力の割合が、所定の基準値よりも小さくなっていることから、判定部5は煙感知室2内に白煙が進入したと判定する。また、受光部4bの出力に比べて受光部4aの出力が小さくなる期間W16では、交差角が相対的に大きい受光部4aの出力に対する、交差角が相対的に小さい受光部4bの出力の割合が、所定の基準値よりも大きくなっていることから、判定部5は煙感知室2内に黒煙が進入したと判定する。
【0117】
ところで、判定部5は、受光部4a,4bの出力と閾値との高低を比較することによって、煙感知室2内に煙が進入したか否かを判定しているのであるが、上述のように黒煙が進入したと判断した場合、上記の閾値を低下させることも好ましい。
【0118】
黒煙の場合は白煙に比べて光の減衰率が大きく、そのため、黒煙が進入した場合には白煙が進入した場合に比べて受光部4a,4bの出力レベルが小さくなる。したがって、黒煙が進入したと判別した場合に、判定部5が、煙の存否を判定する閾値を低下させることによって、煙の検知漏れを抑制することができる。
【0119】
また判定部5は、煙感知室2の内部に異物が進入したことを検知していない状態では複数の受光部4a,4bのうち何れか1つの受光部4aのみを動作させて出力を取り込み、取り込んだ出力が閾値を超えると、他の受光部4bを動作させて出力を取り込んでいる。
【0120】
これにより、煙を検知していない状態では、何れかの受光部4aのみを動作させ、他の受光部4bは動作を停止させているので、消費電力を低減することができる。また、受光部4aの出力が閾値を超えると、判定部5は、複数の受光部4a,4bを動作させ、受光部4a,4bの出力をもとに煙が存在するか否かを判定しているので、煙の存否を確実に検出することができる。
【0121】
尚、上述の実施形態では煙感知室内に検知領域が2つ設定されているが、検知領域が3つ以上存在するように、受光部及び発光部を構成してもよい。また本実施形態では、1つの受光部に対して複数の発光部を設けるか、或いは、1つの発光部に対して複数の受光部を設けることで、複数の検知領域が設けられているが、複数の検知領域の各々で受光部及び発光部を1つずつ設けて散乱光を検出してもよい。
【0122】
尚、上述した実施形態にあっては、煙感知室2を、図1に図示したようなラビリンス壁8に周囲を覆われた構造としているが、そのような煙感知室2に本願発明を適用することを限定するものではない。図1にとらわれず火災感知器の分野でラビリンス壁と称される構造を用いることのない煙感知室、すなわち、ラビリンス壁を有さずに、外気に流通する孔が開けられた煙感知室、これに本願発明を適用してもかまわない。
【符号の説明】
【0123】
1 煙感知器
2 煙感知室
3a,3b 発光部
4 受光部
5 判定部
11,12 光制限部材
A1,A2 検知領域
S1,S2 照射範囲
S3 受光範囲
【技術分野】
【0001】
本発明は、煙感知器に関するものである。
【背景技術】
【0002】
従来、発光素子と、2つの受光素子とを暗箱内に配置した光電式の煙感知器があった(例えば特許文献1参照)。
【0003】
光電式の煙感知器では、暗箱内に煙が流入すると、発光素子の発光が煙によって散乱され、その散乱光が受光素子に入射されるので、受光素子の出力と所定のしきい値との高低を比較することで煙の存否を感知している。しかし、暗室内に虫や埃などが入り込むと、虫や埃などで散乱された光が受光素子に入射して、誤報が発生する可能性があるため、特許文献1の煙感知器では、2つの受光素子が、それぞれ別々の受光領域で煙による散乱光を受光し、一方の受光領域のみで散乱光が受光された場合は虫や埃などによる誤報と判断している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実開平2−6394号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した特許文献1の煙感知器では、2つの受光素子による受光領域を独立させるために、隔離板を暗箱内に設けていた。暗箱の内部は、発光素子の発光を反射して受光素子に入射させないように光学的な設計が行われているが、暗箱内を仕切るように隔離板を配置する場合、光学的な設計がやりにくいという問題がある。また隔離板を設けることによって、暗箱が大型化し、それによって煙感知器全体が大型化するという問題もあった。
【0006】
本発明は上記課題に鑑みて為されたものであり、その目的とするところは、虫や埃による誤検知を低減した小型の煙感知器を提供することにある。
【課題を解決するための手段】
【0007】
本願の煙感知器は、煙感知室と、発光部と、受光部と、判定部とを備える。煙感知室は、外部からの光の進入を抑制し且つ煙の出入りを許容する。発光部は前記煙感知室内の複数の検知領域に光を照射する。受光部には、前記発光部からの直接光は入射せず、それぞれの前記検知領域に流入した煙による散乱光が入射する。判定部は、前記受光部の出力に基づいて前記煙感知室内に煙が進入したか否かを判定する。そして、前記発光部及び前記受光部のうち少なくとも何れか一方と一体に光制限部材が設けられ、この光制限部材によって複数の前記検知領域が重ならないように光の範囲が制限される。
【0008】
この煙感知器において、1つの前記受光部に対して、前記発光部が複数設けられ、複数の前記発光部がそれぞれ対応する検知領域に光を照射することも好ましい。
【0009】
この煙感知器において、各々の前記発光部の光軸と前記受光部の光軸との為す交差角が互いに異なる角度に設定されることも好ましい。
【0010】
この煙感知器において、複数の前記発光部及び前記受光部の光軸を含む平面上で、複数の前記発光部が、前記受光部の光軸に対して同じ側に配置されることも好ましい。
【0011】
この煙感知器において、複数の前記発光部及び前記受光部の光軸を含む平面上で、複数の前記発光部が、前記受光部の光軸に対して両側に配置されることも好ましい。
【0012】
この煙感知器において、前記判定部は、複数の前記発光部が同時に発光しないように、複数の前記発光部の発光を制御する。そして、前記判定部は、複数の前記発光部の各々を個別に発光させた状態での前記受光部の出力をもとに、前記煙感知室内の状態を判定することも好ましい。
【0013】
この煙感知器において、前記判定部は、複数の前記検知領域の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で、前記検知領域に対応する前記発光部を発光させる。そして、前記判定部は、何れかの前記発光部を発光させた状態での前記受光部の出力が閾値を超え、且つ、別の前記発光部を発光させた状態での前記受光部の出力が前記閾値よりも小さい場合、煙以外の異物が前記煙感知室内に進入したと判断することも好ましい。
【0014】
この煙感知器において、前記判定部は、複数の前記検知領域の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で対応する前記発光部を発光させる。そして、前記判定部は、複数の前記発光部の各々を個別に発光させた状態での前記受光部の出力が全て閾値を超えた場合、前記煙感知室内に煙が進入したと判断することも好ましい。
【0015】
この煙感知器において、前記判定部は、複数の前記発光部を間欠的に発光させ、前記受光部の出力に基づいて判定動作を行うことも好ましい。
【0016】
この煙感知器において、前記判定部は、非検知状態では何れか1つの前記発光部を間欠的に発光させる。そして、何れか1つの前記発光部が発光した状態で前記受光部の出力が閾値を超えると、前記判定部は、複数の前記検知領域の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で、他の前記発光部の各々を個別に発光させることも好ましい。
【0017】
この煙感知器において、各々の前記発光部の光軸と前記受光部の光軸との為す交差角が互いに異なる角度に設定され、前記判定部は、前記受光部の出力と閾値との高低を比較することによって、前記煙感知室内に煙が進入したか否かを判定している。そして、前記交差角が相対的に大きい前記発光部が発光した状態での前記受光部の出力に対する、前記交差角が相対的に小さい前記発光部が発光した状態での前記受光部の出力の割合が、所定の基準値よりも大きくなると、前記判定部は、煙感知室内に進入した煙を黒煙と判別して、前記閾値を低下させることも好ましい。
【0018】
この煙感知器において、前記判定部は、前記交差角が相対的に小さい前記発光部の発光時間及び発光光量のうち少なくとも何れか一方を、前記交差角が相対的に大きい前記発光部よりも大きくすることも好ましい。
【0019】
この煙感知器において、前記判定部は、非検知状態では前記交差角が相対的に大きい前記発光部のみを発光させる。そして、前記発光部が発光した状態で前記受光部の出力が閾値を超えると、前記判定部は、複数の前記検知領域の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で他の前記発光部を発光させることも好ましい。
【0020】
この煙感知器において、1つの前記発光部に対して、前記受光部が複数設けられ、複数の前記受光部がそれぞれ対応する検知領域からの光を受光することも好ましい。
【0021】
この煙感知器において、各々の前記受光部の光軸と前記発光部の光軸との為す交差角が互いに異なる角度に設定されることも好ましい。
【0022】
この煙感知器において、前記発光部の光軸及び複数の前記受光部の光軸を含む平面上で、複数の前記受光部が、前記発光部の光軸に対して同じ側に配置されることも好ましい。
【0023】
この煙感知器において、前記発光部の光軸及び複数の前記受光部の光軸を含む平面上で、複数の前記受光部が、前記発光部の光軸に対して両側に配置されたことも好ましい。
【0024】
この煙感知器において、前記判定部は、複数の前記受光部の出力を同時に取り込み、複数の前記受光部の出力をもとに、前記煙感知室内の状態を判定することも好ましい。
【0025】
この煙感知器において、前記判定部は、複数の前記受光部の出力を同時に取り込み、一部の前記受光部の出力が閾値を超え、且つ、他の前記受光部の出力が前記閾値よりも小さい場合、煙以外の異物が前記煙感知室内に進入したと判定することも好ましい。
【0026】
この煙感知器において、前記判定部は、複数の前記受光部の出力を同時に取り込み、全ての前記受光部の出力が閾値を超えた場合、前記煙感知室内に煙が進入したと判断することも好ましい。
【0027】
この煙感知器において、各々の前記受光部の光軸と前記発光部の光軸との為す交差角が互いに異なる角度に設定され、前記判定部は、前記受光部の出力と閾値との高低を比較することによって、前記煙感知室内に煙が進入したか否かを判定する。そして、前記交差角が相対的に大きい前記受光部の出力に対する、前記交差角が相対的に小さい前記受光部の出力の割合が、所定の基準値よりも大きくなると、前記判定部は、煙感知室内に進入した煙を黒煙と判別して、前記閾値を低下させることも好ましい。
【0028】
この煙感知器において、前記判定部は、前記煙感知室内に異物が進入したことを検知していない状態では複数の前記受光部のうち何れか1つの前記受光部のみを動作させて出力を取り込み、取り込んだ出力が閾値を超えると、他の前記受光部を動作させて出力を取り込むことも好ましい。
【発明の効果】
【0029】
本発明によれば、虫や埃による誤検知を低減した小型の煙感知器を提供することができる。
【図面の簡単な説明】
【0030】
【図1】実施形態1の煙感知器の要部を示す平面図である。
【図2】(a)は同上の受光部及び発光部の配置を模式的に示した説明図、(b)は粒子径の比較的大きな煙による散乱光のパワー分布を示す図、(c)は粒子径の比較的小さな煙による散乱光のパワー分布を示す図である。
【図3】(a)は同上の発光部及び受光部の配置を模式的に示した説明図であり、(b)は実施形態2の発光部及び受光部の配置を模式的に示した説明図である。
【図4】(a)(b)は同上の発光部及び受光部の配置を模式的に示した説明図である。
【図5】実施形態4の煙感知器の発光部及び受光部の配置を模式的に示した説明図である。
【図6】(a)(b)は同上の動作を説明するタイムチャートである。
【図7】同上の別の動作を説明するタイムチャートである。
【図8】同上のまた別の動作を説明するタイムチャートである。
【図9】同上の発光部及び受光部の配置を模式的に示した説明図である。
【図10】同上の煙濃度と散乱光強度の関係を示すグラフであり、(a)は黒煙の場合のグラフ、(b)は白煙の場合のグラフである。
【図11】同上の別の動作を説明するタイムチャートである。
【図12】同上のまた別の動作を説明するタイムチャートである。
【図13】同上の動作を説明するフローチャートである。
【図14】実施形態5の発光部及び受光部の配置を模式的に示した説明図である。
【図15】同上の動作を説明するタイムチャートである。
【発明を実施するための形態】
【0031】
本願の実施形態を図面に基づいて説明する。
【0032】
(実施形態1)
本願の実施形態1について図面を参照して説明する。
【0033】
図1は煙感知器1の要部を模式的に示した平面図であり、この煙感知器1は、煙感知室2と、発光部3a,3bと、受光部4と、判定部5とを主要な構成として備えている。
【0034】
煙感知室2は横断面が円形状の光学基台6で構成される。光学基台6は、略円板状の底板7と、複数のラビリンス壁8とを備える。複数のラビリンス壁8は、底板7の外周部から底板7と略直交する方向に突出して、内側の空間を囲んでいる。隣接するラビリンス壁8の隙間9は、外部から煙感知室2内部へと煙が流入する出入口となっている。また、ラビリンス壁8の中間部には屈曲部が設けられており、外部から隙間9を通って入射した光を、ラビリンス壁8が外側へ向けて反射させることによって、外部からの光の進入を抑制している。尚、図1は模式図であり、ラビリンス壁8の形状や個数や配置は、外部からの光の進入を抑制しつつ、煙の流入を妨げないように適宜変更が可能である。また、煙感知室2には、発光部3a,3bと受光部4との間に、発光部3a,3bからの照射光が受光部4に直接入射しないように、直射光を遮光する遮光壁10が設けられている。
【0035】
煙感知室2には、2つの発光部3a,3bと、1つの受光部4が配置されている。受光部4の光軸L3及び発光部3a,3bの光軸L1,L2は同じ平面上にあり、1つだけ設けられた受光部4の光軸L3に対して発光部3a,3bの光軸L1,L2がそれぞれ交差するように、発光部3a、3b及び受光部4が配置されている。
【0036】
発光部3aの光軸L1と受光部4の光軸L3とが交差する付近、すなわち照射光の照射範囲S1と受光光の受光範囲S3とが重なる検知領域A1に煙が流入すると、検知領域A1内の煙によって発光部3aの照射光が散乱され、散乱光の一部が受光部4に入射する。また発光部3bの光軸L2と受光部4の光軸L3とが交差する付近、すなわち照射光の照射範囲S2と受光光の受光範囲S3とが重なる検知領域A2に煙が流入すると、検知領域A2内の煙によって発光部3bの照射光が散乱され、散乱光の一部が受光部4に入射する。
【0037】
ここで、2つの検知領域A1,A2が重ならないように、照射光の照射範囲S1,S2を制限する光制限部材(所謂アパーチャ)11が発光部3a,3bとそれぞれ一体に設けられている。各発光部3a,3bの放射光は光制限部材11の開口11aを通して対応する検知領域A1,A2に照射されている。同様に、2つの検知領域A1,A2が重ならないよう、受光光の受光範囲S3を制限する光制限部材(所謂アパーチャ)12が受光部4と一体に設けられ、検知領域A1,A2からの光は光制限部材12の開口12aを通して受光部4に入射されるようになっている。尚、本実施形態では発光側及び受光側の両方に光制限部材11,12が設けられているが、必ずしも発光側及び受光側の両方に光制限部材11,12を設ける必要は無い。発光側及び受光側のうち何れか一方のみに光制限部材を設けることで、複数の検知領域が重ならないように光(照射光又は受光光の何れか)の範囲を制限できるのであれば、発光側及び受光側のうち何れか一方のみに光制限部材が設けられていてもよい。
【0038】
判定部5は、発光部3a,3bの発光を制御する機能と、受光部4の出力から煙の有無を判定する機能を備えている。判定部5では、発光部3a,3bを所定の時間間隔で交互に点灯させ、発光部3a又は発光部3bが点灯している状態で受光部4の受光量が所定の閾値を越えるか否かを判定する。そして、発光部3aの点灯時と発光部3bの点灯時の両方で受光部4の受光量が閾値を超えていれば、判定部5は煙感知室2内に煙が流入していると判定し、煙感知信号を外部に発報する。発光部3a,3bのうち一方の点灯時のみ受光部4の受光量が閾値を超えるが、他方の点灯時には受光部4の受光量が閾値を超えない場合、判定部5は煙感知室2内に煙が流入していないと判定する。また、発光部3aの点灯時と発光部3bの点灯時の両方で受光部4の受光量が閾値を超えていなければ、判定部5は煙感知室2内に煙が流入していないと判定する。
【0039】
ところで、煙感知室2内に虫や埃などが進入した場合、検知領域A1又は検知領域A2内に入り込んだ虫や埃によって散乱光が発生し、その散乱光を受光部4が受光する可能性はある。しかしながら、2つの検知領域A1,A2の両方に虫や埃が同時に進入する可能性は低いので、判定部5は、検知領域A1,A2の何れか一方のみで散乱光が検出された場合には煙と判定しない。尚、判定部5は、2つの検知領域A1,A2の間を煙以外の異物(虫や埃)が移動するのに必要な移動時間よりも短い時間間隔で発光部3a,3bを発光させている。したがって、煙以外の異物(虫や埃)が煙感知室2内に進入した場合には、発光部3aの発光時と発光部3bの発光時の両方で受光部4の出力が閾値を超えることはない。
【0040】
一方、火災などで発生した煙が煙感知室2に進入した場合は、検知領域A1,A2の両方に煙が流れ込むようにラビリンス壁8などで煙の流れを制御しているので、検知領域A1,A2の両方で散乱光が検出された場合のみ煙が存在すると判定部5が判定する。
【0041】
したがって、本実施形態の煙感知器1では煙以外の異物(例えば虫や埃など)による誤検知が起こりにくく、煙を確実に検出することができる。しかも、照射光の範囲を制限する光制限部材11は発光部3a,3bと一体に設けられ、受光光の範囲を制限する光制限部材12は受光部4と一体に設けられているので、発光部3a,3bや受光部4とは別体に光制限部材を設ける場合に比べて、煙感知器1を小型化できる。また光制限部材が発光部3a,3bや受光部4とは別体に設けられていると、光制限部材自体が迷光の原因となる可能性があるため、光制限部材が発光部3a,3bや受光部4とは別体に設けられた場合に比べて光学設計も容易である。
【0042】
また、1つの受光部4に対して発光部3a,3bが複数設けられ、複数の発光部3a,3bがそれぞれ対応する検知領域A1,A2に光を照射しているので、検知領域A1,A2の各々を受光部及び発光部の組で検知する場合に比べて、受光部4の数を削減できる。
【0043】
また、検知領域A1,A2のそれぞれで、発光部3aの光軸L1と受光部4の光軸L3のなす角度θ1と、発光部3bの光軸L2と受光部4の光軸L3のなす角度θ2が異なるように発光部3a,3b及び受光部4が配置されている。ここで、図1及び図2(a)に示すように、検知領域A1において発光部3aの光軸L1と受光部4の光軸L3のなす角度θ1は鈍角となり、検知領域A2において発光部3bの光軸L2と受光部4の光軸L3のなす角度θ2は鋭角となっている(θ1>θ2)。
【0044】
図2(b)(c)は煙の粒子20に光が当たった場合の散乱光のパワー分布を示しており、同図(b)は粒子径が比較的大きな煙の場合のパワー分布、同図(c)は粒子径が比較的小さな煙の場合のパワー分布をそれぞれ示している。この図から粒子径が大きい場合は前方への散乱成分が大きくなり、粒子径が小さい場合は前方への散乱成分が小さくなって、全方位に略均等に散乱されるパワー分布に近付くことが判る。
【0045】
したがって、入射光と散乱光とのなす角度が比較的大きい場合、すなわち発光部の光軸と受光部の光軸とのなす角度が比較的大きい場合は、粒子径の大小によって受光部からの出力信号の大きさが大きく変化することになる。そのため、粒子径が小さい煙の場合の出力信号は、粒子径が大きい煙の場合の出力信号との差が大きくなるが、粒子径の大きい煙に対してはより大きな出力信号が得られるので、ノイズの影響を受けることなく煙の存在を検知できる。
【0046】
一方、入射光と散乱光とのなす角度が比較的小さい場合、すなわち発光部の光軸と受光部の光軸とのなす角度が比較的小さい場合、入射光と散乱光とのなす角度が大きい場合に比べて出力信号の大きさが全体的に小さくなるものの、粒子径の大小によって出力信号の大きさがあまり変化しないため、粒子径の小さい煙でも検出しやすいという利点がある。
【0047】
本実施形態では2つの検知領域A1,A2のそれぞれで、発光部の光軸と受光部の光軸とのなす角度を異ならせており、発光部の光軸と受光部の光軸とのなす角度が相対的に大きい検知領域A1では信号レベルを大きくすることによってノイズの影響を低減し、粒子径の大きな煙を検出しやすくしている。また発光部の光軸と受光部の光軸とのなす角度が相対的に小さい検知領域A2では、粒子径の大小によって発生する信号レベルの差が小さくなるから、粒子径が比較的小さい煙を検知しやすくなる。
【0048】
また本実施形態では、図3(a)に示すように、発光部3a,3b及び受光部4の光軸L1,L2,L3を含む平面(底板7と平行な平面)において、複数設けられた発光部3a,3bが、1つだけ設けられた受光部4の光軸L3に対して同じ側に配置されている。
【0049】
これにより、発光部3aからの放射光、発光部3bからの放射光がそれぞれ受光部4に直接入射するのを遮光する遮光壁10(遮光部材)が1つで済むから、迷光が発生する原因となる遮光壁10を複数設ける必要がなく、光学的な設計を容易に行うことができる。
【0050】
(実施形態2)
本願の実施形態2を図面に基づいて説明する。
【0051】
実施形態1では、検知領域を複数設けるために1つの受光部4に対して複数の発光部3a,3bを設けているが、本実施形態では図3(b)に示すように1つの発光部3に対して複数の受光部4a,4bを設けることによって複数の検知領域A1,A2を設定する。
【0052】
この場合、煙感知室2内に煙が流入し、発光部3の光軸L1と受光部4aの光軸L3とが交差する付近、すなわち照射光の照射範囲S1と受光光の受光範囲S3とが重なる検知領域A1に煙が流入すると、検知領域A1内の煙によって照射光が散乱され、散乱光の一部が受光部4aに入射する。また発光部3の光軸L1と受光部4bの光軸L4とが交差する付近、すなわち照射光の照射範囲S1と受光光の受光範囲S4とが重なる検知領域A2に煙が流入すると、検知領域A2内の煙によって照射光が散乱され、散乱光の一部が受光部4bに入射する。
【0053】
ここで、2つの検知領域A1,A2が重ならないよう、実施形態1と同様に、発光部3が光を照射する照射範囲を制限する光制限部材(図示せず)と、受光部4a,4bが光を受光する受光範囲をそれぞれ制限する光制限部材(図示せず)とが設けられている。すなわち、発光部3と一体に照射光の照射範囲S1を制限する光制限部材が設けられ、発光部3の放射光は光制限部材の開口を通して検知領域A1,A2に照射される。また、受光部4a,4bとそれぞれ一体に受光光の受光範囲S3,S4を制限する光制限部材(図示せず)が設けられ、受光部4a,4bにはそれぞれ一体に設けられた光制限部材の開口を通して対応する検知領域A1,A2からの光が入射されている。
【0054】
この煙感知器1では、判定部5が発光部3の発光を制御するとともに、受光部4a,4bを動作させてその出力を取り込み、受光部4a,4bの出力をもとに煙の有無を感知する。判定部5は、発光部3を点灯させたときの受光部4a,4bの出力信号が両方共に所定の閾値を超えると、煙感知室2内に煙が存在すると判定し、煙感知信号を外部に出力する。また判定部5は、発光部3を点灯させたときの受光部4a,4bの出力信号が両方共に閾値を超えない場合や、受光部4a,4bのうち一方のみの出力信号しか閾値を超えない場合は煙が存在しないと判定する。これにより、煙感知室2内に進入した虫や埃などを煙と誤検出する可能性を低減できる。また、光の範囲を制限する光制限部材が発光部3及び受光部4a,4bと一体に設けられているので、発光部3や受光部4a,4bとは別体に光制限部材を設ける場合に比べて、煙感知器1を小型化でき、光学設計も容易になる。
【0055】
上述のように複数の検知領域A1,A2を設けるために、1つの発光部3に対して複数の受光部4a,4bが設けられているので、検知領域A1,A2の各々を受光部及び発光部の組で検知する場合に比べて、発光部3の数を削減でき、コストダウンが図られる。また、1つの受光部に対して複数の発光部を設けた場合は、発光部を1個ずつ点灯させることによって、検知領域A1,A2の各々で煙の有無を検出する必要があるが、1つの発光部3に対して複数の受光部4a,4bを設けているので、検知領域A1,A2での煙の有無を同時に検出することができる。
【0056】
(実施形態3)
上述の実施形態1,2では、発光部及び受光部の光軸を含む平面上で、複数設けられた発光部又は受光部が、1つだけ設けられた受光部又は発光部の光軸に対して同じ側に配置されているが、図4に示すように、複数設けられた発光部又は受光部が、1つだけ設けられた受光部又は発光部の光軸に対して両側に配置されていてもよい。
【0057】
図4(a)の配置例では、1つの受光部4に対して2つの発光部3a,3bが設けられ、発光部3a,3b及び受光部4の光軸L1,L2,L3を含む平面上で、複数設けられた発光部3a,3bが、1つだけ設けられた受光部4の光軸L3に対して両側に配置されている。すなわち、2つの発光部3a,3bは、それぞれの光軸L1,L2が略平行になるように、光軸L3を挟んで斜向かいに配置されている。発光部3aの光軸L1と受光部4の光軸L3とが交差する付近、すなわち照射光の照射範囲S1と受光光の受光範囲S3とが重なる検知領域A1に煙が流入すると、検知領域A1内の煙によって照射光が散乱され、散乱光の一部が受光部4に入射する。また発光部3bの光軸L2と受光部4の光軸L3とが交差する付近、すなわち照射光の照射範囲S2と受光光の受光範囲S3とが重なる検知領域A2に煙が流入すると、検知領域A2内の煙によって照射光が散乱され、散乱光の一部が受光部4に入射する。上述の実施形態1と同様に、2つの検知領域A1,A2が重ならないように、照射光の照射範囲S1を制限する光制限部材(図示せず)が発光部3a,3bとそれぞれ一体に設けられている。各発光部3a,3bの放射光は光制限部材の開口を通して対応する検知領域A1,A2に照射される。また、2つの検知領域A1,A2が重ならないよう、受光光の受光範囲S3を制限する光制限部材(図示せず)が受光部4と一体に設けられており、検知領域A1,A2からの光は光制限部材の開口を通して受光部4に入射される。
【0058】
ここで、煙感知室2内に虫や埃などが進入した場合、検知領域A1又は検知領域A2内に入り込んだ虫や埃によって散乱光が発生し、その散乱光を受光部4が受光する可能性はある。しかしながら、2つの検知領域A1,A2の両方に虫や埃が同時に進入する可能性は低いので、判定部5は、検知領域A1,A2の何れか一方のみで散乱光が検出された場合には煙と判定しない。一方、火災などで発生した煙が煙感知室2に進入した場合は、検知領域A1,A2の両方に煙が流れ込むようにラビリンス壁8などで煙の流れを制御しているので、検知領域A1,A2の両方で散乱光が検出された場合のみ煙が存在すると判定部5が判定する。これにより、虫や埃などによる誤検知が起こりにくく、煙を確実に検出することができる。また、光の範囲を制限する光制限部材が発光部3a,3b及び受光部4と一体に設けられているので、発光部3a,3bや受光部4とは別体に光制限部材を設ける場合に比べて、煙感知器1を小型化できる。また、迷光の原因となる光制限部材が発光部3a,3bや受光部4とは別体に設けられている場合に比べて光学設計も容易である。尚、本実施形態では発光側および受光側の両方に光制限部材が設けられているが、複数の検知領域が重ならないように、光(照射光又は受光光の何れか)の範囲を制限できるのであれば、発光側及び受光側のうち何れか一方のみに光制限部材が設けられていてもよい。
【0059】
ここで、2つの発光部3a,3bの光軸L1,L2は略平行であり、受光部4の光軸L3に対して斜めに交差しているので、発光部3aの光軸L1と受光部4の光軸L3とのなす角度θ1と、発光部3bの光軸L2と受光部4の光軸L3とのなす角度θ2とは互いに異なっている。すなわち、2つの検知領域A1,A2のそれぞれで、発光部の光軸と受光部の光軸とのなす角度θ1,θ2が互いに異なっている。これにより、発光部の光軸と受光部の光軸とのなす角度が相対的に大きい検知領域A1では粒子径の大きい煙を検出しやすく、発光部の光軸と受光部の光軸とのなす角度が相対的に小さい検知領域A2では粒子径の小さい煙を検出しやすくなる。
【0060】
図1及び図3に示すように、受光部4の光軸L3に対して同じ側に2つの発光部3a,3bが配置された場合、2つの検知領域A1,A2で受光側の光軸と発光側の光軸とがなす角度を異ならせようとすると、発光部3aの光軸L1に対して発光部3bの光軸L2が斜めに交差するように配置されるから、2つの検知領域A1,A2の間に無駄なスパースができる。それに対して、図4(a)に示すように2つの発光部3a,3bが光軸L3の両側に配置されていれば、互いの光軸が平行するように発光部3a,3bが配置されることによって、検知領域A1,A2で受光側の光軸と発光側の光軸とのなす角度を異ならせることができる。したがって、2つの発光部3a,3bは互いに近接させて配置することができ、検知領域A1,A2の間にできる無駄なスペースが小さくなり、全体として小型化を図ることができる。
【0061】
尚、図4(a)の配置例では1つの受光部4に対して2つの発光部3a,3bを配置しているが、図4(b)に示すように1つの発光部3に対して2つの受光部4a,4bを設けてもよく、上述と同様、検知領域A1,A2の間にできる無駄なスペースを小さくし、全体として小型化を図ることができる。
【0062】
以上説明したように、煙感知器は、煙感知室と、発光部と、受光部とを備える。煙感知室は、外部からの光の進入を抑制し、且つ、煙の出入りを許容する。発光部は煙感知室内の複数(上述の実施形態では2つ)の検知領域に光を照射する。受光部には、発光部からの直接光は入射せず、それぞれの検知領域に流入した煙による散乱光が入射する。そして、発光部及び受光部のうち少なくとも何れか一方と一体に、複数の検知領域が重ならないように光の範囲を制限する光制限部材が設けられたことを特徴とする。
【0063】
これにより、受光部によって複数の検知領域の一部のみで散乱光が検出された場合は煙ではなく、虫や埃によるものと判定でき、虫や埃による誤検知を低減できる。さらに、複数の検知領域が重ならないように光の範囲を制限する光制限部材は受光部及び発光部のうち少なくとも何れか一方と一体に設けられているので、受光部又は発光部とは別体に光制限部材が設けられた場合に比べて、光制限部材を小さくできるから煙感知器1の小型化が図れる。また、迷光の原因となる光制限部材が受光部又は発光部と別体に設けられた場合に比べて光学的な設計が容易になる。
【0064】
この煙感知器において、1つの受光部に対して、発光部が複数設けられ、複数の発光部がそれぞれ対応する検知領域に光を照射することも好ましい。
【0065】
これにより、複数の検知領域の各々を受光部及び発光部の組で検知する場合に比べて、受光部の数を削減でき、コストダウンを図ることができる。
【0066】
この煙感知器において、1つの発光部に対して、受光部が複数設けられ、複数の受光部がそれぞれ対応する検知領域からの光を受光することも好ましい。
【0067】
これにより、複数の検知領域の各々を受光部及び発光部の組で検知する場合に比べて、発光部の数を削減でき、コストダウンを図ることができる。また、1つの受光部に対して複数の発光部を設けた場合は、発光部を1個ずつ点灯させることによって、各検知領域での煙の有無を検出する必要があるが、1つの発光部に対して複数の受光部を設けているので、複数の検知領域での煙の有無を同時に検出することができる。
【0068】
この煙感知器において、複数の検知領域のそれぞれで、発光部の光軸と受光部の光軸とのなす角度が互いに異なることも好ましい。
【0069】
上述のように、煙による光の散乱特性は粒子径によって変化し、粒子径が大きいほど前方への散乱成分が大きくなり、粒子径が小さいほど前方への散乱成分が小さくなって、散乱方向による散乱成分の差が小さくなる傾向がある。複数の検知領域のそれぞれで、発光部の光軸と受光部の光軸とのなす角度を互いに異ならせた場合、発光部の光軸と受光部の光軸とのなす角度が相対的に大きい検知領域では、粒子径の大きい煙による散乱成分を大きくすることで、受光部の出力レベルを大きくして、粒子径の大きい煙を検知しやすくできる。また、発光部の光軸と受光部の光軸とのなす角度が相対的に小さい検知領域では、粒子径の大きい煙による散乱成分と粒子径の小さい煙による散乱成分との差が小さくなるので、粒子径の小さい煙を検知しやすくなる。したがって、複数の検知領域のそれぞれで、発光部の光軸と受光部の光軸とのなす角度を互いに異ならせることによって、粒子径が相対的に大きい煙或いは粒子径が相対的に小さい煙を検知しやすくできる。
【0070】
また、この煙感知器において、発光部及び受光部のうちの何れか一方が複数設けられ、発光部及び受光部の光軸を含む平面上で、複数設けられた発光部又は受光部が、1つだけ設けられた受光部又は発光部の光軸に対して同じ側に配置されることも好ましい。
【0071】
これにより、発光部からの照射光が受光部に直接入射するのを遮光する遮光部材を、1つだけ設けられた受光部又は発光部の光軸に対して片側のみに設ければよいという利点がある。
【0072】
この煙感知器において、発光部及び受光部のうちの何れか一方が複数設けられ、発光部及び受光部の光軸を含む平面上で、複数設けられた発光部又は受光部が、1つだけ設けられた受光部又は発光部の光軸に対して両側に配置されることも好ましい。
【0073】
複数設けられた発光部又は受光部が、1つだけ設けられた受光部又は発光部の光軸に対して同じ側に配置された場合、複数の検知領域で発光部の光軸と受光部の光軸とのなす角度を異ならせるためには、複数設けられた発光部又は受光部の光軸を互いに交差させるように配置しなければならず、複数の検知領域の間に無駄がスペースができてしまう。それに対して、複数設けられた発光部又は受光部が、1つだけ設けられた受光部又は発光部の光軸の両側に配置される場合、複数設けられた発光部又は受光部の光軸を互いに平行するように配置すればよいから、複数の検知領域の間にできる隙間を小さくでき、全体として煙感知器の小型化を図ることができる。
【0074】
(実施形態4)
本実施形態の煙感知器1は、実施形態1で説明した煙感知器1と同様の構成を有しているので、その説明は省略する。
【0075】
本実施形態では、図5に示すように、1つの受光部4に対して2つの発光部3a,3bを備え、発光部3a,3bによる照射範囲S1,S2と受光部4の受光範囲S4とが重なる領域をそれぞれ検知領域A1,A2としている。
【0076】
判定部5は、発光部3a,3bの発光を制御する機能と、受光部4の出力から煙の有無を判定する機能を備えている。判定部5は、複数(本実施形態では2個)の発光部3a,3bを同時に発光させず、発光部3a,3bの各々を個別に発光させた状態での受光部4の出力をもとに、煙感知室2内の状態を判定している。
【0077】
これにより、複数の検知領域毎に発光部と受光部の組を設ける必要が無く、1つの受光部4で複数の検知領域の状態を監視することができる。
【0078】
また判定部5は、複数の検知領域A1,A2の間を煙以外の異物(例えば埃や虫など)が移動するのに必要な移動時間よりも短い時間間隔で、各検知領域A1,A2に対応する発光部3a,3bを発光させている。そして、判定部5は、何れかの発光部(発光部3a又は発光部3b)を発光させた状態での受光部4の出力が閾値を超え、且つ、別の発光部(発光部3b又は発光部3a)を発光させた状態での受光部4の出力が閾値よりも小さい場合、煙以外の異物が煙感知室2内に進入したと判断する。
【0079】
図5に示すように、外部より煙感知室2に進入した埃Dが検知領域A1から検知領域A2に移動する場合を考える。発光部3a,3bの発光間隔が、検知領域A1,A2間を煙以外の異物が移動するのに必要な移動時間より長い時間T2に設定されていると、図6(b)に示すように発光部3aの点灯時と発光部3bの点灯時の両方で受光部4の出力が閾値を超える可能性がある。この場合、判定部5は、発光部3aの点灯時と発光部3bの点灯時の両方で受光部4の出力が閾値を超えることから、煙感知室2内に煙が進入したと誤検出してしまう。そこで、発光部3a,3bの発光間隔を、検知領域A1,A2間を煙以外の異物が移動するのに必要な移動時間より短い時間に設定するのが好ましい。図6(a)に示すように、発光部3a,3bの発光間隔が上記の移動時間より短い時間T1に設定されていれば、発光間隔T1が経過するまでの間に埃Dが検知領域A1内に移動することはできない。したがって、検知領域A1内に埃Dが進入したために、発光部3aの発光時における受光部4の出力が閾値を超えたとしても、発光間隔T1が経過するまでの間に埃Dが検知領域A2に移動することはできないため、発光部3bの発光時における受光部4の出力が閾値を超えることはない。したがって、煙感知室2の内部に煙以外の異物(埃や虫など)が進入した場合には、発光部3aの発光時と発光部3bの発光時の両方で受光部4の出力が閾値を超えないようにすることができ、煙が進入したと判定部5が誤検出する可能性を低減できる。
【0080】
また判定部5は、複数の検知領域A1,A2の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で対応する発光部3a,3bを発光させている。そして、判定部5は、複数の発光部3a,3bの各々を個別に発光させた状態での受光部4の出力が全て閾値を超えた場合、煙感知室2内に煙が進入したと判断する。
【0081】
図7の期間W1では、発光部3a,3bの発光時に、検知領域A1,A2内に異物が進入しておらず、受光部4の出力は閾値よりも低いため、判定部5は、煙感知室2の内部に煙や、虫・埃などの異物が進入していないと判定する。また期間W2では、発光部3aの発光時には、検知領域A1内に異物が進入しているため、受光部4の出力が閾値を超えるが、発光部3bの発光時には検知領域A2内に異物が進入していないため、受光部4の出力は閾値を下回っている。よって、判定部5は、一方の発光部3aの発光時のみ受光部4の出力が閾値を超えているから、煙感知室2内に煙以外の異物(埃や虫など)が進入していると判定する。また期間W3では、発光部3a,3bの両方の発光時に受光部4の出力が閾値を超えており、この場合、判定部5は煙感知室2内に煙が進入していると判定する。火災に伴う煙が煙感知室2内に進入した場合、煙感知室2の内部に略均一に煙が存在するから、判定部5は、発光部3a,3bを個別に発光させた状態での受光部4の出力が全て閾値を超えた場合、煙感知室2内に煙が進入したと判断しており、誤検出を低減できる。
【0082】
また判定部5は、図7に示すように、複数の発光部3a,3bを所定の周期T3で間欠的に発光させて、発光部3a,3bの発光時における受光部4の出力から判定動作を行っており、発光部3a,3bを点灯させ続けた場合に比べて、消費電力を低減できる。
【0083】
また判定部5が、煙感知室2内に異物が進入したことを検知していない状態では何れか1つの発光部3aのみを発光させ、発光部3aが発光した状態で受光部4の出力が閾値を超えると、他の発光部3bを発光させることも好ましい。ここで、発光部3bを発光させる際に、判定部5は、検知領域A1,A2の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で発光部3bを発光させている。
【0084】
煙感知室2の内部に煙が進入した場合は検知領域A1,A2の両方で煙が検出されるので、一方の発光部3aを発光させた際に受光部4の出力が閾値を超えていなければ、煙感知室2の内部に煙が進入していないと判断できる。したがって、図8に示すように、判定部5は、煙を検知していない期間W4では、何れか1つの発光部(例えば発光部3a)のみを発光させ、発光部3aの発光時に受光部4の出力が閾値を超えた場合(期間W5,W6)は他の発光部3bも発光させている。そして、発光部3bの発光時に受光部4の出力が閾値を超えていなければ(期間W5)、判定部5は煙以外の異物が進入したと判定し、発光部3bの発光時に受光部4の出力が閾値を超えると(期間W6)、判定部5は煙が進入したと判定する。このように、煙や埃・虫などの異物を検知していない非検知状態では何れか1つの発光部のみを発光させることで、省電力を図ることができる。また、発光部3aを発光させた状態で受光部4の出力が閾値を超えると、判定部5は、他の発光部3bを発光させて受光部4の出力を取り込み、その出力に基づいて煙が進入したか否かを判定しているので、煙や虫などの異物を煙と誤検知する可能性を低減できる。
【0085】
ところで、図9に示すように各々の発光部3a,3bの光軸L1,L2と受光部4の光軸L3とが為す交差角θ1,θ2は互いに異なる角度に設定されている。図9の配置では、発光部3aの光軸L1と受光部4の光軸L3とが為す交差角θ1に比べて、発光部3bの光軸L2と受光部4の光軸L3とが為す交差角θ2の方が小さくなっている(θ1>θ2)。
【0086】
実施形態1で説明したように、煙の粒子に光が当たった場合、粒子径の大小によって散乱光のパワー分布が異なることが判明している。また、火災の初期時に発生する白煙(燻煙)は、燃焼の拡大時に発生する黒煙に比べて、煙の粒子径が大きくなっている。したがって、白煙による散乱光のパワー分布は、図2(b)に示すように前方への散乱成分が大きくなるようなパワー分布となり、黒煙による散乱光のパワー分布は、図2(c)に示すように全方位に略均等に散乱されるパワー分布となる。また、黒煙の場合は白煙に比べて光の減衰率が大きいため、煙濃度が同じであれば、受光部4に入射する散乱光強度は、白煙に比べて黒煙の方が小さくなる。
【0087】
図10(a)は黒煙が進入した場合に受光部4に入射する散乱光強度と煙濃度との関係を示し、図10(b)は白煙が進入した場合に受光部4に入射する散乱光強度と煙濃度との関係を示している。また図10(a)(b)中の特性Eは、交差角が相対的に大きい発光部3aが発光した状態での散乱光強度を示し、図(a)(b)中の特性Fは、交差角が相対的に小さい発光部3bが発光した状態での散乱光強度を示している。
【0088】
ここで、白煙の場合には、交差角が鈍角となる発光部3aの発光時に比べ、交差角が鋭角となる発光部3bの発光時の方が、受光部4に入射する散乱光強度が大幅に小さくなっている。一方、黒煙の場合には、白煙の場合に比べて、交差角による散乱光強度の変化が小さいため、発光部3aの発光時と発光部3bの発光時とで、受光部4に入射する散乱光強度の差は、白煙の場合よりも小さくなっている。したがって、煙濃度がX1の時に、白煙の場合は、発光部3aの発光状態での受光部4の出力c4に対する、発光部3bの発光状態での受光部4の出力c3の割合は(c3/c4)となる。一方、煙濃度がX1の時に、黒煙の場合は、発光部3aの発光状態での受光部4の出力c2に対する、発光部3bの発光状態での受光部4の出力c1の割合は(c1/c2)となり、白煙の場合の割合(c3/c4)に比べて大きくなっている。
【0089】
このことから、判定部5では、交差角が相対的に大きい発光部3aが発光した状態での受光部4の出力に対する、交差角が相対的に小さい発光部3bが発光した状態での前記受光部の出力の割合と、所定の基準値との大小を比較する。そして、上記の割合が基準値よりも大きくなると、判定部5は煙感知室2内に黒煙が進入していると判別しており、煙感知室2内に進入した煙の種類(白煙であるか黒煙であるか)を判別することができる。そして、黒煙と判別された場合、黒煙の進入時は白煙の進入時に比べて受光部4に入射する光量が低下するので、判定部5は、煙の有無を判定するための閾値を低下させており、受光部4の出力が低下する黒煙の場合でも煙の存在を確実に検出することができる。
【0090】
また判定部5では、交差角が相対的に小さい発光部3bの発光時間及び発光光量のうち少なくとも何れか一方を、交差角が相対的に大きい発光部3aよりも大きくすることも好ましい。交差角が相対的に小さい発光部3bでは、交差角が相対的に大きい発光部3aに比べて煙による散乱成分が小さくなるため、白煙の流入時における受光部4の出力が小さくなると考えられる。したがって、判定部5では、発光部3bの発光時間及び発光光量のうち少なくとに何れか一方を、発光部3aよりも大きくしており、これによって発光部3bの発光時における受光部4の出力を大きくできるから、煙の検出漏れを低減できる。
【0091】
この場合の動作を図11に基づいて説明する。図11の例では、交差角が小さいために、発光部3aに比べて出力が小さくなる発光部3bへの供給電力を大きくすることで、発光部3bの発光光量を大きくしている。
【0092】
図11の期間W7では煙感知室2の内部に煙などの異物が進入していないため、発光部3a,3bの点灯時には受光部4から信号は出力されない。
【0093】
図11の期間W8では煙感知室2の内部に白煙が進入しており、白煙の場合には交差角が小さい方が交差角が大きい場合に比べて散乱光成分は低下するが、交差角の小さい発光部3bの発光量を発光部3aよりも大きくすることで、発光部3aの発光時と発光部3bの発光時とで受光部4の出力を略同じ大きさにしている。
【0094】
図11の期間W9では煙感知室2の内部に黒煙が進入しており、黒煙の場合は交差角によって散乱光成分の大きさがあまり変化しないため、発光部3bの発光量を増加させた分だけ、発光部3aの発光時における受光部4の出力に比べて、発光部3aの発光時における受光部4の出力が大きくなっている。尚、黒煙の場合は白煙に比べて光の減衰量が大きいため、発光部3aの発光時における受光部4の出力は、白煙の進入時に比べて黒煙の進入時の方が低下している。
【0095】
このように、交差角が小さい発光部3bの発光量(発光時間又は発光光量)を大きくすることで、交差角による散乱光成分の大きさが変化する白煙の場合にも、発光部3bの発光時における受光部4の出力を大きくでき、煙の検知漏れを抑制することができる。
【0096】
また、煙感知室2の内部に煙や埃・虫などの異物が進入したことを検知していない非検知状態では、判定部5は、図8に示すように何れか1つの発光部を発光させているのであるが、交差角が相対的に小さい発光部3aのみを発光させることが好ましい。複数ある発光部3a,3bの内の1つだけを発光させることで、電力消費を低減できる。また図11に示すように発光部3bの発光量を大きくしている場合には、発光量の小さい発光部3aのみを発光させることにより、電力消費をさらに低減できる。
【0097】
この場合の動作を図12に基づいて説明する。図12の期間W10,W11では煙感知室2内に煙が進入しておらず、発光部3aの発光時における受光部4の出力は閾値よりも小さいため、判定部5は、煙が進入していないと判断し、発光部3bを点灯させていない。一方、図12の期間W12では煙感知室2の内部に黒煙が進入しており、判定部5は、発光部3aの発光時における受光部4の出力が閾値を超えることから、発光部3bを発光させ、発光部3bの発光時における受光部4の出力が閾値を超えていれば、煙が進入したと判定する。
【0098】
このように、非検知状態では判定部5が発光部3aのみを点灯させているので、消費電力を低減することができる。また、発光部3aに比べて交差角が小さい発光部3bの発光量を発光部3aよりも大きくしている場合は、非検知状態において発光量の小さい発光部3aのみを点灯させることで、消費電力をさらに低減することができる。また、発光部3aのみを点灯させた状態で受光部4の出力が閾値を超えると、判定部5は、複数の発光部3a,3bを別個に点灯させ、発光部3a,3bをそれぞれ点灯させた状態での出力部4の出力をもとに煙が存在するか否かを判定しているので、煙の存否を確実に検出することができる。
【0099】
ここで、以上の動作をまとめると図13に示すようなフローチャートで表される。判定部5は、先ず、受光部4の光軸と為す交差角θ1が相対的に大きい発光部3aを発光させ(ステップST1)、この時の受光部4の出力を所定の閾値と比較することで、異物の進入を検知したか否かを判定する(ステップST2)。ここで、受光部4の出力が所定の閾値よりも小さければ(ステップST2のno)、判定部5は、煙感知室2の内部に何も進入していないと判定する(ステップST3)。一方、受光部4の出力が所定の閾値よりも大きければ(ステップST2のyes)、判定部5は、煙感知室2の内部に何かが進入したと判定して、発光部3bを発光させ(ステップST4)、この時の受光部4の出力を所定の閾値と比較する(ステップST5)。
【0100】
ここで、受光部4の出力が閾値を超えていれば(ステップST5のyes)、判定部5は、発光部3aの発光時における受光部4の出力と、発光部3bの発光時における受光部4の出力との高低を比較する(ステップST6)。そして、発光部3bの発光時における受光部4の出力が、発光部3aの発光時における受光部4の出力よりも小さければ(ステップST6のyes)、判定部5は、煙感知室2内に黒煙が進入したと判定する(ステップST7)。さらに、判定部5は、発光部3bの発光時における受光部4の出力と、黒煙火災時の発報閾値との高低を比較する(ステップST8)。ここで、受光部4の出力が黒煙火災時の発報閾値を超えていれば(ステップST8のyes)、判定部5は煙感知室2内に火災による煙が進入したと判定する(ステップST9)。また、受光部4の出力が黒煙火災時の発報閾値よりも小さければ(ステップST8のno)、判定部5は煙感知室2内に薄い煙が進入したと判定する(ステップST12)。
【0101】
また、ステップST6の判定において、発光部3bの発光時における受光部4の出力が、発光部3aの発光時における受光部4の出力よりも大きければ(ステップST6のno)、判定部5は、煙感知室2内に白煙が進入したと判定する(ステップST10)。さらに、判定部5は、発光部3bの発光時における受光部4の出力と、白煙火災時の発報閾値との高低を比較し(ステップST11)、受光部4の出力が白煙火災時の発報閾値を超えていれば(ステップST11のyes)、火災による煙と判定する(ステップST9)。また、ステップST11の判定において、発光部3bの発光時における受光部4の出力が、発光部3aの発光時における受光部4の出力よりも大きければ(ステップST11のno)、煙以外の異物(埃や虫など)が煙感知室2の内部に進入したと判定する(ステップST13)。また、ステップST5の判定において、受光部4の出力が閾値以下であれば、煙以外の異物(埃や虫など)が煙感知室2の内部に進入したと判定する(ステップST13)。
【0102】
(実施形態5)
本実施形態の煙感知器1は、実施形態2で説明した煙感知器1と同様の構成を有しているので、その説明は省略する。
【0103】
本実施形態では、図14に示すように、1つの発光部3に対して2つの受光部4a,4bを備え、受光部4a,4bの受光範囲S3,S4と発光部3による照射範囲S1とがそれぞれ重なる領域をそれぞれ検知領域A1,A2としている。
【0104】
判定部5は、発光部3の発光を制御する機能と、受光部4a,4bの出力から煙の有無を判定する機能を備えている。判定部5は、発光部3を発光させた状態で、受光部4a,4bを同時に動作させて、受光部4a,4bの出力を同時に取り込み、受光部4a,4bの出力に基づいて、煙感知室2内の状態を判定する。
【0105】
すなわち、本実施形態では1つの発光部3に対して、複数の受光部4a,4bが設けられ、複数の受光部4a,4bがそれぞれ対応する検知領域A1,A2からの光を受光している。これにより、複数の検知領域毎に発光部と受光部の組を設ける必要が無く、1つの発光部3で複数の検知領域A1,A2の状態を監視することができる。
【0106】
ここにおいて、本実施形態では、複数の受光部4a,4b及び発光部3の光軸を含む平面上で、複数の受光部4a,4bが、発光部3の光軸に対して同じ側に配置されている。
【0107】
これにより、発光部3からの放射光が受光部4a,4bに直接入射するのを遮光する遮光壁が1つで済むから、迷光が発生する原因となる遮光壁を複数設ける必要がなく、光学的な設計を容易に行うことができる。
【0108】
なお、実施形態3で説明したように、複数の受光部4a,4b及び発光部3の光軸を含む平面上で、複数の受光部4a,4bが、発光部3の光軸に対して両側に配置されることも好ましい。
【0109】
複数の受光部4a,4bが、発光部3の光軸に対して両側に配置されていれば、互いの光軸が平行するように受光部4a,4bが配置されることによって、検知領域A1,A2で受光側の光軸と発光側の光軸とのなす角度を異ならせることができる。したがって、検知領域A1,A2で受光側の光軸と発光側の光軸との為す角度を異ならせたい場合でも、複数の受光部4a,4bを互いに近接させて配置でき、検知領域A1,A2の間にできる無駄なスペースが小さくなり、全体として小型化を図ることができる。
【0110】
また、判定部5は、複数の受光部4a,4bの出力を同時に取り込み、複数の受光部4a,4bの出力をもとに、煙感知室2内の状態を判定しており、1つの発光部3で複数の検知領域A1,A2の状態を監視することができる。
【0111】
ここで、判定部5は、複数の受光部4a,4bの出力を同時に取り込み、一部の受光部の出力が閾値を超え、且つ、他の受光部の出力が閾値よりも小さい場合、煙以外の異物が煙感知室2内に進入したと判定する。
【0112】
煙感知室2の内部に煙が進入した場合は全ての受光部4a,4bの出力が増加すると予想されるが、煙感知室2の内部に埃や虫などが進入した場合、複数の検知領域A1,A2に埃や虫が同時に進入する可能性は低いと予想される。例えば図15の期間W14のように受光部4aの出力のみ閾値を超え、受光部4bの出力が閾値よりも小さい場合、判定部5は、煙以外の異物(埃や虫など)が煙感知室2内に進入したと判定しており、煙が進入したと誤判定する可能性を低減できる。
【0113】
なお、図15の期間W13のように受光部4a,4bの出力が何れも閾値より低い場合、同時に取り込んだ受光部4a,4bの出力が閾値を下回っていることから、判定部5は、煙感知室2の内部に何も進入していないと判定する。
【0114】
また、図15の期間W15,W16のように、同時に取り込んだ受光部4a,4bの出力が何れも閾値を超えた場合、判定部5は、煙感知室2の内部に煙が進入したと判定する。
【0115】
ここで、受光部4aの光軸と発光部3の光軸とが為す角度θ1と、受光部4bの光軸と発光部3の光軸とが為す角度θ2とが互いに異なるように、発光部3及び受光部4a,4bが配置されている。本実施形態では、受光部4aの光軸と発光部3の光軸とが為す角度θ1に比べて、受光部4bの光軸と発光部3の光軸とが為す角度θ2の方が小さくなっている。粒子径が比較的大きい白煙が煙感知室2の内部に進入した場合に、交差角が小さい受光部4bでは、交差角が大きい受光部4aに比べて入射光量が小さくなるが、本実施形態では受光部4bの感度を受光部4aの感度よりも高めに設定しているので、期間W15では受光部4aの出力と受光部4bの出力がほぼ同じになっている。一方、黒煙が進入した場合には、受光部4a,4bの入射光量が略同じになるので、受光部4bの感度を高めに設定している分だけ、期間W16では受光部4bの出力の方が大きくなっている。
【0116】
これにより、受光部4aの出力と受光部4bの出力が略同じ大きさとなる期間W15では、交差角が相対的に大きい受光部4aの出力に対する、交差角が相対的に小さい受光部4bの出力の割合が、所定の基準値よりも小さくなっていることから、判定部5は煙感知室2内に白煙が進入したと判定する。また、受光部4bの出力に比べて受光部4aの出力が小さくなる期間W16では、交差角が相対的に大きい受光部4aの出力に対する、交差角が相対的に小さい受光部4bの出力の割合が、所定の基準値よりも大きくなっていることから、判定部5は煙感知室2内に黒煙が進入したと判定する。
【0117】
ところで、判定部5は、受光部4a,4bの出力と閾値との高低を比較することによって、煙感知室2内に煙が進入したか否かを判定しているのであるが、上述のように黒煙が進入したと判断した場合、上記の閾値を低下させることも好ましい。
【0118】
黒煙の場合は白煙に比べて光の減衰率が大きく、そのため、黒煙が進入した場合には白煙が進入した場合に比べて受光部4a,4bの出力レベルが小さくなる。したがって、黒煙が進入したと判別した場合に、判定部5が、煙の存否を判定する閾値を低下させることによって、煙の検知漏れを抑制することができる。
【0119】
また判定部5は、煙感知室2の内部に異物が進入したことを検知していない状態では複数の受光部4a,4bのうち何れか1つの受光部4aのみを動作させて出力を取り込み、取り込んだ出力が閾値を超えると、他の受光部4bを動作させて出力を取り込んでいる。
【0120】
これにより、煙を検知していない状態では、何れかの受光部4aのみを動作させ、他の受光部4bは動作を停止させているので、消費電力を低減することができる。また、受光部4aの出力が閾値を超えると、判定部5は、複数の受光部4a,4bを動作させ、受光部4a,4bの出力をもとに煙が存在するか否かを判定しているので、煙の存否を確実に検出することができる。
【0121】
尚、上述の実施形態では煙感知室内に検知領域が2つ設定されているが、検知領域が3つ以上存在するように、受光部及び発光部を構成してもよい。また本実施形態では、1つの受光部に対して複数の発光部を設けるか、或いは、1つの発光部に対して複数の受光部を設けることで、複数の検知領域が設けられているが、複数の検知領域の各々で受光部及び発光部を1つずつ設けて散乱光を検出してもよい。
【0122】
尚、上述した実施形態にあっては、煙感知室2を、図1に図示したようなラビリンス壁8に周囲を覆われた構造としているが、そのような煙感知室2に本願発明を適用することを限定するものではない。図1にとらわれず火災感知器の分野でラビリンス壁と称される構造を用いることのない煙感知室、すなわち、ラビリンス壁を有さずに、外気に流通する孔が開けられた煙感知室、これに本願発明を適用してもかまわない。
【符号の説明】
【0123】
1 煙感知器
2 煙感知室
3a,3b 発光部
4 受光部
5 判定部
11,12 光制限部材
A1,A2 検知領域
S1,S2 照射範囲
S3 受光範囲
【特許請求の範囲】
【請求項1】
外部からの光の進入を抑制し且つ煙の出入りを許容する煙感知室と、
前記煙感知室内の複数の検知領域に光を照射する発光部と、
前記発光部からの直接光は入射せず、それぞれの前記検知領域に流入した煙による散乱光が入射する受光部と、
前記受光部の出力に基づいて前記煙感知室内に煙が進入したか否かを判定する判定部を備え、
前記発光部及び前記受光部のうち少なくとも何れか一方と一体に、複数の前記検知領域が重ならないように光の範囲を制限する光制限部材が設けられたことを特徴とする煙感知器。
【請求項2】
1つの前記受光部に対して、前記発光部が複数設けられ、複数の前記発光部がそれぞれ対応する検知領域に光を照射することを特徴とする請求項1記載の煙感知器。
【請求項3】
各々の前記発光部の光軸と前記受光部の光軸との為す交差角が互いに異なる角度に設定されたことを特徴とする請求項2記載の煙感知器。
【請求項4】
複数の前記発光部及び前記受光部の光軸を含む平面上で、複数の前記発光部が、前記受光部の光軸に対して同じ側に配置されたことを特徴とする請求項2又は3記載の煙感知器。
【請求項5】
複数の前記発光部及び前記受光部の光軸を含む平面上で、複数の前記発光部が、前記受光部の光軸に対して両側に配置されたことを特徴とする請求項2又は3記載の煙感知器。
【請求項6】
前記判定部は、複数の前記発光部が同時に発光しないように、複数の前記発光部の発光を制御し、
前記判定部は、複数の前記発光部の各々を個別に発光させた状態での前記受光部の出力をもとに、前記煙感知室内の状態を判定することを特徴とする請求項1乃至5の何れか1つに記載の煙感知器。
【請求項7】
前記判定部は、複数の前記検知領域の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で、前記検知領域に対応する前記発光部を発光させ、
前記判定部は、何れかの前記発光部を発光させた状態での前記受光部の出力が閾値を超え、且つ、別の前記発光部を発光させた状態での前記受光部の出力が前記閾値よりも小さい場合、煙以外の異物が前記煙感知室内に進入したと判断することを特徴とする請求項6記載の煙感知器。
【請求項8】
前記判定部は、複数の前記検知領域の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で対応する前記発光部を発光させ、
前記判定部は、複数の前記発光部の各々を個別に発光させた状態での前記受光部の出力が全て閾値を超えた場合、前記煙感知室内に煙が進入したと判断することを特徴とする請求項6記載の煙感知器。
【請求項9】
前記判定部は、複数の前記発光部を間欠的に発光させ、前記受光部の出力に基づいて判定動作を行うことを特徴とする請求項6記載の煙感知器。
【請求項10】
前記判定部は、非検知状態では何れか1つの前記発光部を間欠的に発光させ、
何れか1つの前記発光部が発光した状態で前記受光部の出力が閾値を超えると、前記判定部は、複数の前記検知領域の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で、他の前記発光部の各々を個別に発光させることを特徴とする請求項9記載の煙感知器。
【請求項11】
各々の前記発光部の光軸と前記受光部の光軸との為す交差角が互いに異なる角度に設定され、
前記判定部は、前記受光部の出力と閾値との高低を比較することによって、前記煙感知室内に煙が進入したか否かを判定しており、
前記交差角が相対的に大きい前記発光部が発光した状態での前記受光部の出力に対する、前記交差角が相対的に小さい前記発光部が発光した状態での前記受光部の出力の割合が、所定の基準値よりも大きくなると、前記判定部は、煙感知室内に進入した煙を黒煙と判別して、前記閾値を低下させることを特徴とする請求項2乃至10の何れか記載の煙感知器。
【請求項12】
前記判定部は、前記交差角が相対的に小さい前記発光部の発光時間及び発光光量のうち少なくとも何れか一方を、前記交差角が相対的に大きい前記発光部よりも大きくしたことを特徴とする請求項11記載の煙感知器。
【請求項13】
前記判定部は、非検知状態では前記交差角が相対的に大きい前記発光部のみを発光させ、
前記発光部が発光した状態で前記受光部の出力が閾値を超えると、前記判定部は、複数の前記検知領域の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で他の前記発光部を発光させることを特徴とする請求項11又は12記載の煙感知器。
【請求項14】
1つの前記発光部に対して、前記受光部が複数設けられ、複数の前記受光部がそれぞれ対応する検知領域からの光を受光することを特徴とする請求項1記載の煙感知器。
【請求項15】
各々の前記受光部の光軸と前記発光部の光軸との為す交差角が互いに異なる角度に設定されたことを特徴とする請求項14記載の煙感知器。
【請求項16】
前記発光部の光軸及び複数の前記受光部の光軸を含む平面上で、複数の前記受光部が、前記発光部の光軸に対して同じ側に配置されたことを特徴とする請求項14又は15記載の煙感知器。
【請求項17】
前記発光部の光軸及び複数の前記受光部の光軸を含む平面上で、複数の前記受光部が、前記発光部の光軸に対して両側に配置されたことを特徴とする請求項14又は15記載の煙感知器。
【請求項18】
前記判定部は、複数の前記受光部の出力を同時に取り込み、複数の前記受光部の出力をもとに、前記煙感知室内の状態を判定することを特徴とする請求項14乃至17の何れか1つに記載の煙感知器。
【請求項19】
前記判定部は、複数の前記受光部の出力を同時に取り込み、一部の前記受光部の出力が閾値を超え、且つ、他の前記受光部の出力が前記閾値よりも小さい場合、煙以外の異物が前記煙感知室内に進入したと判定することを特徴とする請求項18記載の煙感知器。
【請求項20】
前記判定部は、複数の前記受光部の出力を同時に取り込み、全ての前記受光部の出力が閾値を超えた場合、前記煙感知室内に煙が進入したと判断することを特徴とする請求項18記載の煙感知器。
【請求項21】
各々の前記受光部の光軸と前記発光部の光軸との為す交差角が互いに異なる角度に設定され、
前記判定部は、前記受光部の出力と閾値との高低を比較することによって、前記煙感知室内に煙が進入したか否かを判定しており、
前記交差角が相対的に大きい前記受光部の出力に対する、前記交差角が相対的に小さい前記受光部の出力の割合が、所定の基準値よりも大きくなると、前記判定部は、煙感知室内に進入した煙を黒煙と判別して、前記閾値を低下させることを特徴とする請求項20記載の煙感知器。
【請求項22】
前記判定部は、前記煙感知室内に異物が進入したことを検知していない状態では複数の前記受光部のうち何れか1つの前記受光部のみを動作させて出力を取り込み、取り込んだ出力が閾値を超えると、他の前記受光部を動作させて出力を取り込むことを特徴とする請求項21記載の煙感知器。
【請求項1】
外部からの光の進入を抑制し且つ煙の出入りを許容する煙感知室と、
前記煙感知室内の複数の検知領域に光を照射する発光部と、
前記発光部からの直接光は入射せず、それぞれの前記検知領域に流入した煙による散乱光が入射する受光部と、
前記受光部の出力に基づいて前記煙感知室内に煙が進入したか否かを判定する判定部を備え、
前記発光部及び前記受光部のうち少なくとも何れか一方と一体に、複数の前記検知領域が重ならないように光の範囲を制限する光制限部材が設けられたことを特徴とする煙感知器。
【請求項2】
1つの前記受光部に対して、前記発光部が複数設けられ、複数の前記発光部がそれぞれ対応する検知領域に光を照射することを特徴とする請求項1記載の煙感知器。
【請求項3】
各々の前記発光部の光軸と前記受光部の光軸との為す交差角が互いに異なる角度に設定されたことを特徴とする請求項2記載の煙感知器。
【請求項4】
複数の前記発光部及び前記受光部の光軸を含む平面上で、複数の前記発光部が、前記受光部の光軸に対して同じ側に配置されたことを特徴とする請求項2又は3記載の煙感知器。
【請求項5】
複数の前記発光部及び前記受光部の光軸を含む平面上で、複数の前記発光部が、前記受光部の光軸に対して両側に配置されたことを特徴とする請求項2又は3記載の煙感知器。
【請求項6】
前記判定部は、複数の前記発光部が同時に発光しないように、複数の前記発光部の発光を制御し、
前記判定部は、複数の前記発光部の各々を個別に発光させた状態での前記受光部の出力をもとに、前記煙感知室内の状態を判定することを特徴とする請求項1乃至5の何れか1つに記載の煙感知器。
【請求項7】
前記判定部は、複数の前記検知領域の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で、前記検知領域に対応する前記発光部を発光させ、
前記判定部は、何れかの前記発光部を発光させた状態での前記受光部の出力が閾値を超え、且つ、別の前記発光部を発光させた状態での前記受光部の出力が前記閾値よりも小さい場合、煙以外の異物が前記煙感知室内に進入したと判断することを特徴とする請求項6記載の煙感知器。
【請求項8】
前記判定部は、複数の前記検知領域の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で対応する前記発光部を発光させ、
前記判定部は、複数の前記発光部の各々を個別に発光させた状態での前記受光部の出力が全て閾値を超えた場合、前記煙感知室内に煙が進入したと判断することを特徴とする請求項6記載の煙感知器。
【請求項9】
前記判定部は、複数の前記発光部を間欠的に発光させ、前記受光部の出力に基づいて判定動作を行うことを特徴とする請求項6記載の煙感知器。
【請求項10】
前記判定部は、非検知状態では何れか1つの前記発光部を間欠的に発光させ、
何れか1つの前記発光部が発光した状態で前記受光部の出力が閾値を超えると、前記判定部は、複数の前記検知領域の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で、他の前記発光部の各々を個別に発光させることを特徴とする請求項9記載の煙感知器。
【請求項11】
各々の前記発光部の光軸と前記受光部の光軸との為す交差角が互いに異なる角度に設定され、
前記判定部は、前記受光部の出力と閾値との高低を比較することによって、前記煙感知室内に煙が進入したか否かを判定しており、
前記交差角が相対的に大きい前記発光部が発光した状態での前記受光部の出力に対する、前記交差角が相対的に小さい前記発光部が発光した状態での前記受光部の出力の割合が、所定の基準値よりも大きくなると、前記判定部は、煙感知室内に進入した煙を黒煙と判別して、前記閾値を低下させることを特徴とする請求項2乃至10の何れか記載の煙感知器。
【請求項12】
前記判定部は、前記交差角が相対的に小さい前記発光部の発光時間及び発光光量のうち少なくとも何れか一方を、前記交差角が相対的に大きい前記発光部よりも大きくしたことを特徴とする請求項11記載の煙感知器。
【請求項13】
前記判定部は、非検知状態では前記交差角が相対的に大きい前記発光部のみを発光させ、
前記発光部が発光した状態で前記受光部の出力が閾値を超えると、前記判定部は、複数の前記検知領域の間を煙以外の異物が移動するのに必要な移動時間よりも短い時間間隔で他の前記発光部を発光させることを特徴とする請求項11又は12記載の煙感知器。
【請求項14】
1つの前記発光部に対して、前記受光部が複数設けられ、複数の前記受光部がそれぞれ対応する検知領域からの光を受光することを特徴とする請求項1記載の煙感知器。
【請求項15】
各々の前記受光部の光軸と前記発光部の光軸との為す交差角が互いに異なる角度に設定されたことを特徴とする請求項14記載の煙感知器。
【請求項16】
前記発光部の光軸及び複数の前記受光部の光軸を含む平面上で、複数の前記受光部が、前記発光部の光軸に対して同じ側に配置されたことを特徴とする請求項14又は15記載の煙感知器。
【請求項17】
前記発光部の光軸及び複数の前記受光部の光軸を含む平面上で、複数の前記受光部が、前記発光部の光軸に対して両側に配置されたことを特徴とする請求項14又は15記載の煙感知器。
【請求項18】
前記判定部は、複数の前記受光部の出力を同時に取り込み、複数の前記受光部の出力をもとに、前記煙感知室内の状態を判定することを特徴とする請求項14乃至17の何れか1つに記載の煙感知器。
【請求項19】
前記判定部は、複数の前記受光部の出力を同時に取り込み、一部の前記受光部の出力が閾値を超え、且つ、他の前記受光部の出力が前記閾値よりも小さい場合、煙以外の異物が前記煙感知室内に進入したと判定することを特徴とする請求項18記載の煙感知器。
【請求項20】
前記判定部は、複数の前記受光部の出力を同時に取り込み、全ての前記受光部の出力が閾値を超えた場合、前記煙感知室内に煙が進入したと判断することを特徴とする請求項18記載の煙感知器。
【請求項21】
各々の前記受光部の光軸と前記発光部の光軸との為す交差角が互いに異なる角度に設定され、
前記判定部は、前記受光部の出力と閾値との高低を比較することによって、前記煙感知室内に煙が進入したか否かを判定しており、
前記交差角が相対的に大きい前記受光部の出力に対する、前記交差角が相対的に小さい前記受光部の出力の割合が、所定の基準値よりも大きくなると、前記判定部は、煙感知室内に進入した煙を黒煙と判別して、前記閾値を低下させることを特徴とする請求項20記載の煙感知器。
【請求項22】
前記判定部は、前記煙感知室内に異物が進入したことを検知していない状態では複数の前記受光部のうち何れか1つの前記受光部のみを動作させて出力を取り込み、取り込んだ出力が閾値を超えると、他の前記受光部を動作させて出力を取り込むことを特徴とする請求項21記載の煙感知器。
【図1】



【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−109751(P2013−109751A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2012−171354(P2012−171354)
【出願日】平成24年8月1日(2012.8.1)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成24年8月1日(2012.8.1)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]