
熱分解ガス化溶融処理プラントの制御方法及び装置、並びにプログラム
【課題】給塵外乱により流動床の温度が急低下したような場合でも、給塵負荷を不足させずに流動床の温度を回復させる。
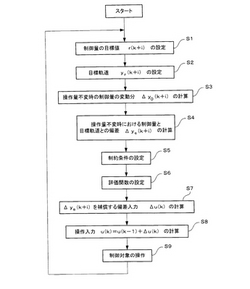
【解決手段】制御量の目標値と実測値とに基づいて目標軌道を設定する(S1〜S2)。以後操作量を変更しなかった場合における制御量の変動分を計算する(S3)。これらから操作量不変更時における制御量と目標軌道との偏差を求める(S4)。また、流動床温度に応じて制約条件及び評価関数を設定し(S5)、その制約条件に基づいて、評価関数を最小化する制御入力偏差量を求める(S6)。次に、この制御入力偏差量を前制御周期の操作量に加算することにより操作入力を求める(S7)。そして、求めた操作入力により制御対象を操作する(S8)。
【解決手段】制御量の目標値と実測値とに基づいて目標軌道を設定する(S1〜S2)。以後操作量を変更しなかった場合における制御量の変動分を計算する(S3)。これらから操作量不変更時における制御量と目標軌道との偏差を求める(S4)。また、流動床温度に応じて制約条件及び評価関数を設定し(S5)、その制約条件に基づいて、評価関数を最小化する制御入力偏差量を求める(S6)。次に、この制御入力偏差量を前制御周期の操作量に加算することにより操作入力を求める(S7)。そして、求めた操作入力により制御対象を操作する(S8)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、熱分解ガス化溶融処理プラントの制御方法及び装置、並びにプログラムに関するものである。特に、未来の挙動を予測しながら熱分解ガス化溶融処理プラントを制御する熱分解ガス化溶融処理プラントの制御方法及び装置、並びにプログラムに関する。
【背景技術】
【0002】
近年、都市ごみなどの廃棄物の発熱量は増加の一途をたどり、最終処分地容量の逼迫や二次公害(地下水汚染)の問題、法規制の強化などの関係から、廃棄物の溶融による減容化、固定化が進められている。さらに、ダイオキシン類などの微量汚染物質の抑制など、廃棄物処理に要求される課題が多い。このような状況において、廃棄物を還元雰囲気で熱分解ガス化し、発生した可燃ガスを高温で燃焼し、焼却残渣を溶融する熱分解ガス化溶融処理プラントが注目されている。この熱分解ガス化溶融処理プラントには、給塵機により廃棄物を投入して底部に流動粒子を備えた流動層内で熱分解する流動床ガス化炉と、この流動床ガス化炉から排出される熱分解ガスを燃焼して灰分を溶融する溶融炉とを有しているものがある。
【0003】
熱分解ガス化溶融処理プラントには、以下のような特徴がある。
1.廃棄物の持つエネルギーを利用して灰の溶融を可能にし、焼却残渣の減容化、再資源化が可能となる。
2.低温熱分解により有価金属を回収することが可能となる。
3.低空気比が可能なことから、装置をコンパクトにすることが可能となる。
4.溶融炉での高温燃焼により、ダイオキシン類などの微量有害物質の抑制が可能となる。
【0004】
熱分解ガス化溶融処理プラントの主な操作量としては、例えば、廃棄物を投入する量である給塵量(例えば、給塵機速度)やガス化溶融炉の流動床に空気を送り込む量である押込空気量が挙げられる。従来の技術においては、これらの操作量の操作はオペレータの手動操作で行われるか、単独の制御ループを組み合わせて行われることが基本となっていた。また、熱分解ガス化溶融処理プラントの後段に廃熱ボイラを設置し、熱回収を図るプラントにおいては、従来から、ボイラ出力側の蒸気弁の開度を調整し、ボイラドラム圧力を自動制御により一定にしていた。そして、これらの方法によって、流動床ガス化炉の流動床や熱分解ガス化溶融処理プラントの出口付近の温度、溶融炉の温度、あるいはボイラからの蒸気流量などを安定にすることが考えられていた。しかし、熱分解ガス化溶融処理プラントは、流動床が還元雰囲気に保たれており、熱分解ガス化反応は給塵量と押込空気量の微妙なバランスの上に成り立っているため、酸化雰囲気でごみを燃焼させる流動床焼却炉に比べて、操作の難しい制御対象である。さらに、安定してガス化を促進するには、底部に備えられた流動粒子の砂層温度(即ち、流動床の温度)を適切範囲に保つ必要があり、操作入力の上下限制約も守る必要がある。したがって、従来の単純なフィードバック制御の組み合わせでは、実現できる性能に限界があった。
【0005】
そこで、近年、未来の挙動を予測しながら熱分解ガス化溶融処理プラントを制御する技術が開発されている。例えば、特許文献1には、熱分解ガス化溶融処理プラントの挙動を予測する予測モデルを用いて、1つ以上の制御量の未来挙動を予測し、その予測系列が望ましい系列(即ち、目標軌道)に近づくように、熱分解ガス化溶融処理プラントの制約条件を考慮しながら操作入力を最適化することによって、熱分解ガス化溶融処理プラントを安定させて制御する方法が開示されている。
【0006】
【特許文献1】特開2004−20049号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
ここで、前述の特許文献1の発明では、ガス化溶融処理プラントを安定して制御することができるが、突発的に廃棄物が過剰に入ってしまうような給塵外乱(「突発的過剰供給」と表現することにする)に対しては、流動床の容積が小さな小型炉において、以下のような動作が発生する可能性がある。即ち、小型炉において比較的水分の多い廃棄物の突発的過剰供給が起きると、砂層温度が急低下する傾向がある。特に、ガス化安定のため砂層温度を低く保っている場合は、砂層温度が下限を下回るおそれがあり、そのまま放っておくと、砂層温度が回復できない範囲まで低下するおそれもある。そこで、特許文献1の発明では、砂層温度が目標値にスムーズに回復するように、給塵機速度を一時的に低減させることになる。その結果、砂層温度は確実に急回復し、人の手を借りることなく自動的に運転を継続することができる。しかしながら、給塵負荷が一時的に不足するため、溶融炉の温度を始め、ボイラドラム圧力、蒸気流量等が一時的に低下し、スラグの粘性が一次的に大きくなる場合があった。
【0008】
本発明の目的は、突発的過剰供給等の給塵外乱により流動床の温度が急低下したような場合でも、給塵負荷を不足させずに流動床の温度を回復させることができる熱分解ガス化溶融処理プラントの制御方法及び装置、並びにプログラムを提供することである。
【課題を解決するための手段及び効果】
【0009】
本発明に係る熱分解ガス化溶融処理プラントの制御方法は、給塵機により投入された廃棄物を熱分解して熱分解ガスを生成する熱分解ガス化炉と、前記熱分解ガス化炉から排出される熱分解ガスを燃焼させると共にその熱を利用して焼却残渣を溶融する溶融炉とを有する熱分解ガス化溶融処理プラントの制御方法において、前記熱分解ガス化溶融処理プラントに係る制御量の現時点における実測値及び現時点以降の目標値から、前記制御量の目標軌道を定める第1のステップと、前記制御量の現時点以降における予測値を求める第2のステップと、前記目標軌道と前記予測値とのずれ量を求める第3のステップと、前記熱分解ガス化溶融処理プラントの状態に応じて設定された操業上の制約条件のもとで与えられる評価関数を考慮した上で、前記ずれ量が補償されるように前記熱分解ガス化溶融処理プラントに係る操作量を最適化する第4のステップと、を有し、前記操作量の少なくとも1つ以上が流動床の温度に影響を与える操作量であり、前記制御量が少なくとも2つ以上であるとともにその内1つが流動床の温度であり、且つ、前記流動床の温度が予め設定された下限値以下である場合に、未来の有限区間において前記流動床の温度が下限値以上となるように前記制約条件を設定するとともに、前記流動床の温度に関する項を除いて前記評価関数を設定することを特徴とする。
【0010】
本発明に係る熱分解ガス化溶融処理プラントの制御装置は、給塵機により投入された廃棄物を熱分解して熱分解ガスを生成する熱分解ガス化炉と、前記熱分解ガス化炉から排出される熱分解ガスを燃焼させると共にその熱を利用して焼却残渣を溶融する溶融炉とを有する熱分解ガス化溶融処理プラントの制御装置において、前記熱分解ガス化溶融処理プラントに係る制御量の現時点における実測値及び現時点以降の目標値から、前記制御量の目標軌道を定める第1の手段と、前記制御量の現時点以降における予測値を求める第2の手段と、前記目標軌道と前記予測値とのずれ量を求める第3の手段と、前記熱分解ガス化溶融処理プラントの状態に応じて設定された操業上の制約条件のもとで与えられる評価関数を考慮した上で、前記ずれ量が補償されるように前記熱分解ガス化溶融処理プラントに係る操作量を最適化する第4の手段と、を有し、前記操作量の少なくとも1つ以上が流動床の温度に影響を与える操作量であり、前記制御量が少なくとも2つ以上であるとともにその内1つが流動床の温度であり、且つ、前記流動床の温度が予め設定された下限値以下である場合に、未来の有限区間において前記流動床の温度が下限値以上となるように前記制約条件を設定するとともに、前記流動床の温度に関する項を除いて前記評価関数を設定することを特徴とする。
【0011】
本発明に係るプログラムは、コンピュータを上述したような熱分解ガス化溶融処理プラントの制御装置として機能させることが可能なプログラムである。
【0012】
これによると、突発的過剰供給等の吸塵外乱により流動床の温度が下限値以下となる場合に、未来の有限区間(例えば、5分先から10分先までの5分間)において流動床の温度が下限値を下回らない範囲となるような制約条件を追加することにより、流動床の温度が回復できない範囲にまで急低下することを防止するとともに、流動床の温度の回復を補償することができる。また、突発的過剰供給等の吸塵外乱により流動床の温度が下限値以下となる場合に、未来の有限区間において流動床の温度に関する項を取り除いた評価関数に切り替えて操作量を求めることにより、流動床の温度の目標軌道自体が定められず、流動床温度を無理に目標軌道に回復させようとしないため、吸塵機の供給負荷の一時的な低下を防止し、流動床の温度を目標値に合わせようとするあまりに他の制御量が犠牲になることを防止することができる。尚、流動床の温度に影響を与える操作量とは、例えば、熱分解ガス化炉への給塵量、廃棄物のカロリー、流動床に吹き込まれる空気量および空気温度、電気ヒータの温度、補助燃料量等が考えられる。
【0013】
本発明に係る熱分解ガス化溶融処理プラントの制御方法及び装置、並びにプログラムにおいて、前記下限値は、前記廃棄物の性状に応じて設定することが好ましい。
【0014】
これによると、廃棄物の性状に応じて下限値を設定することにより、流動床の温度が回復できない範囲にまで急低下することを防止するとともに、吸塵機の供給負荷の一時的な低下を防止して、無理なく流動床の温度を目標値に近づけるように操作量を決定することができる。例えば、水分を含んだ廃棄物の場合は流動床の温度が急低下する傾向が高いため下限値を高めに設定し、水分を含まない廃棄物の場合は流動床の温度が急低下する傾向が低いため下限値を低めに設定する。
【0015】
尚、本発明に係るプログラムは、CD−ROM(Compact Disc Read Only Memory)ディスク、フレキシブルディスク(FD)、MO(Magneto Optical)ディスクなどのリムーバブル型記録媒体や、ハードディスクなどの固定型記録媒体に記録して配布可能である他、有線又は無線の電気通信手段によってインターネットなどの通信ネットワークを介して配布可能である。ここで、コンピュータは、パーソナルコンピュータのような汎用型に限らず、特定用途を有する装置に組み込まれたものであってもよい。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照しつつ、本発明の好適な実施形態について説明する。
【0017】
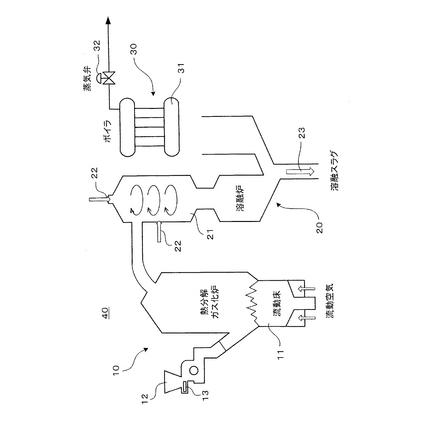
まず、本発明の実施形態による制御方法及び装置、並びにプログラムを適用する熱分解ガス化溶融処理プラントの構成を、図1に基づいて説明する。図1は、熱分解ガス化溶融処理プラントの部分概略図を示すものである。
【0018】
図1に示すように、熱分解ガス化溶融処理プラント40は、熱分解ガス化炉10と、溶融炉20と、ボイラ30とから構成されている。
【0019】
熱分解ガス化炉10には、被焼却物である廃棄物(都市ごみ、産業廃棄物など)を投入するホッパ12が設けられており、ホッパ12に投入された廃棄物は、給塵機13によって、後述する流動床11に供給される。なお、この給塵機13によって供給される廃棄物の量(給塵量)は、給塵機13の回転数を調節することにより増減できるようになっている。また、熱分解ガス化炉10には、底部に流動粒子(例えば、砂)からなる流動床11が設けられている。流動床11の下部からは図示されない送風機により流動空気が吹き込まれ、流動床11の流動粒子及び給塵機13により供給された廃棄物が流動撹拌される。なお、この熱分解ガス化炉10は、流動床11の流動粒子の流動層温度(砂層温度)が、アルミニウムの融点(600℃)以下で、鉄やアルミニウムなどの金属を未酸化状態で回収するため、約500〜600℃となるように運転される。廃棄物は、流動床11内で空気比0.2〜0.3程度の還元雰囲気の中で熱分解され、熱分解ガス(可燃性ガス)や未燃固形分(チャー、灰分など)となって、後述する溶融炉20に出て行く。
【0020】
溶融炉20は、熱分解ガス化炉10で生成された熱分解ガス、未燃固形分を約1300〜1400℃の高温で燃焼させる。また、溶融炉20は、熱分解ガス化炉10に引き続いた部分が旋回流溶融炉21になっており、後述する燃焼用空気が図の矢印に示すように強旋回される。未燃の熱分解ガスは、燃焼用空気によって高温燃焼する。燃焼用空気は、図示されない空気予熱器により予熱されて供給口22から供給される。なお、ごみ顕熱が不足する場合は、燃焼用空気の他に重油も使用する。灰分は溶融し、スラグが生成されるとともに、ダイオキシン類を分解する。溶融スラグは、スラグ下流口23より炉外へと回収されることにより有用な資源として利用される。
【0021】
ボイラ30は、熱分解ガス化炉10及び溶融炉20に付属して設置されており、ガス化溶融のプロセスで発生した熱を回収する。ボイラ30は、ガス化溶融のプロセスで発生した熱を利用して水を蒸発させるボイラドラム31、及び、ボイラドラム31の圧力(以下、「ボイラドラム圧力」と称する。)やボイラドラム31から排出される蒸気流量(以下、「蒸気流量」と称する。)を調節する蒸気弁32を備えている。このボイラ30で発生した蒸気の持つエネルギーは、図示されない蒸気タービン、発電機によって電気エネルギーに変換され、余剰電力や設備所要電力として回収される。また、ボイラ30の下流側には、図示されないガス冷却装置、排ガス処理装置(バグフィルタ等)、誘引送風機、煙突が順に設置されている。ここで、誘引送風機(IDF)は、炉内の排ガスを誘引して煙突から放出するための送風機であり、炉内の圧力が高くなると回転数を上げて多量のガスを誘引するなど、炉内圧を一定(負圧)に保つために動作している。
【0022】
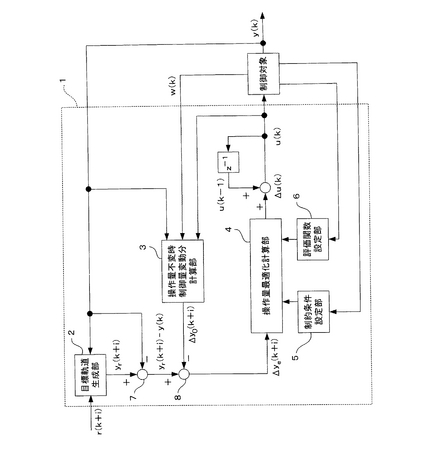
次に、本発明の実施形態による制御装置を、図2に基づいて説明する。図2は、本実施形態に係る制御装置のブロック線図を示すものである。なお、本実施形態では、制御手法としてモデル予測制御手法を用いる。
【0023】
制御装置1は、目標軌道生成部2と、操作量不変時制御量変動分計算部3と、操作量最適化計算部4と、制約条件設定部5と、評価関数設定部6と、制御量差分計算部7と、操作量不変時制御量偏差計算部8とを備えている。
【0024】
目標軌道生成部(第1の手段)2は、制御量の目標値r(k+i)と、制御量の実測値y(k)に基づいて、目標軌道yr(k+i)を設定する。
【0025】
操作量不変時制御量変動分計算部(第2の手段)3は、制御量の実測値y(k)、操作入力u(k)、その他制御対象の観測量w(k)の履歴から、以後操作量を変更しなかった場合における制御量の変動分(現時点の値からの変動分)Δy0(k+i)を計算する。操作量不変時における制御量の変動分Δy0(k+i)を現時点の制御量の実測値y(k)に加算することによって、制御量の現時点以降における予測値が求まる。この操作量不変時における制御量の変動分Δy0(k+i)の計算に際しては、使用するモデルの種類(ARXモデル、ステップ応答モデル、プログラムからなるシミュレータなど)や操作入力の数(単入力か多入力か)によって、操作入力u(k)を必要としなかったり、制御量の実測値y(k)を必要としなかったり、あるいは、その他制御対象の観測量w(k)の現時刻以降の挙動を推定するモデルを必要としたり、その他、外乱の影響を推定する機能を含んでも良い。なお、本実施形態では、その他制御対象の観測量w(k)として熱分解ガス化炉10の炉内圧力の値を使っている。
【0026】
また、制御量差分計算部7は、目標軌道生成部2で設定した目標軌道yr(k+i)と比較した場合の、制御量の実測値y(k)との差分yr(k+i)−y(k)を計算する。
【0027】
操作量不変時制御量偏差計算部(第3の手段)8は、制御量差分計算部7が求めた、目標軌道yr(k+i)と制御量の実測値y(k)との差分yr(k+i)−y(k)と、操作量不変時制御量変動分計算部3で求めた操作量不変時における制御量の変動分Δy0(k+i)とから、操作量不変時における制御量と目標軌道との偏差Δye(k+i)(目標軌道と予測値とのずれ量)を計算する。
【0028】
制約条件設定部5は、熱分解ガス化溶融処理プラント40の状況に応じて制約条件を設定する。制約条件としては、例えば、操作入力や制御量の上下限制約、操作入力の変動量の制約、熱分解ガス化炉10や溶融炉20の出口温度など、直接の制御量ではないが、操業上定められている制約などがあり、いずれも直接あるいは間接的に操作入力の制約条件として表すことができる。また、これらの制約条件を目標処理量や廃棄物の質(ごみ質)、流動床温度、溶融状態(溶融炉温度)、ボイラドラム31の圧力などによって変更することにより、熱分解ガス化溶融処理プラント40の状況に合わせた操作が可能となり、より安定した自動操業が実現できる。ここで、流動床11の温度(以下、「流動床温度」と称する。)が下限値以下である場合には、未来の有限区間(例えば、5分先から10分先までの5分間)において流動床温度が下限値以上であるという制約条件を付け加える。従って、流動床温度が下限値以下の場合には、流動床温度が現時点より低下しない範囲で操作量を求めることとなる。尚、流動床温度の下限値とは、温度がそれ以下になるとガス化が安定しない(あるいは操業が停止してしまう)値ではなく、ある程度余裕をもった値である。下限値を下回っても操業上全く問題ないが、下限値からさらに温度が急低下するような場合には、急操作を必要とする。また、未来の有限区間は、無駄時間や流動床温度の応答速度等を考慮して(少なくとも、無駄時間の分だけ先の時間)、予め設定する。
【0029】
評価関数設定部6は、操作量不変更時における制御量と目標軌道との偏差Δye(k+i)と、後述する現時点以降の操作入力が制御量に及ぼす影響を表す部分Δy+(k+i)が、未来の一定区間において、できるだけ一致するような評価関数を設定する。但し、流動床温度が下限値以下の場合には、流動床温度の項を除いた評価関数を設定する。従って、流動床温度が下限値以下の場合に求める操作量は、「流動床温度を定められた標準軌道に沿って速やかに回復させる」ものではなく、「流動床温度が回復傾向にあるのであれば、回復の仕方は問わない」とするものであって、供給負荷の一時的な低下を防ごうとするものとなる。
【0030】
操作量最適化計算部(第4の手段)4は、流動床温度に応じて、制約条件設定部5で設定された制約条件と、評価関数設定部6で設定された評価関数とに基づいて、操作量不変時制御量偏差計算部8で計算された操作量不変時における制御量と目標軌道との偏差Δye(k+i)を補償するための制御入力偏差量Δu(k)を求める。この制御入力偏差量Δu(k)を前制御周期の操作量u(k−1)に加算することによって、制御対象Aに入力する最適化された操作入力(操作量)u(k)が求まる。
【0031】
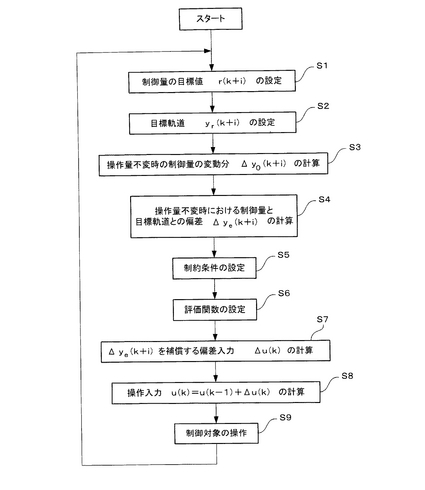
次に、本発明の実施形態による制御方法を、図3のフローチャートに基づいて説明する。図3は、本実施形態に係る制御方法のフローチャートを示すものである。なお、本実施形態では、上述の制御装置と同様、制御手法としてモデル予測制御手法を用いる。
【0032】
まず、ステップS1で、制御量の目標値r(k+i)を設定する。ここで、目標値r(k+i)は、流動床温度、ボイラドラム圧力、蒸気流量のそれぞれの目標値を要素とするベクトルである。
【0033】
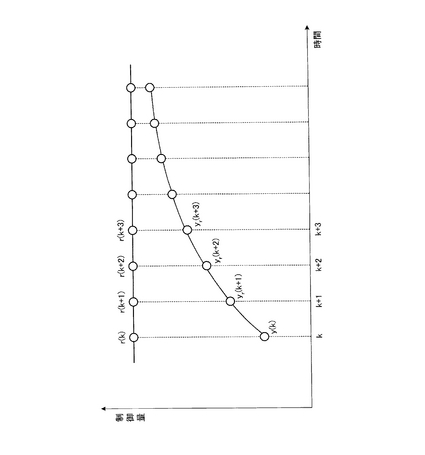
次に、ステップS2で、制御量の目標値r(k+i)と制御量の実測値y(k)とに基づいて、目標軌道生成部2が目標軌道yr(k+i)を設定する(第1のステップ)。目標軌道yr(k+i)の設定方法としては、例えば、図4に示すものがある。これは、次式のように設定するものであり、制御量の実測値y(k)から制御量の目標値r(k+i)に一定の割合で近づけていくものである。なお、次式の行列Cを3×3の零行列にすれば、目標軌道yr(k+i)は制御量の目標値r(k+i)そのものに一致する。
【0034】
【数1】

【0035】
次に、ステップS3で、操作量不変時制御量変動分計算部3が、モデルを用いて操作量不変時における制御量の変動分Δy0(k+i)を計算する。操作量不変時における制御量の変動分Δy0(k+i)を現時点の制御量の実測値y(k)に加算することによって、制御量の現時点以降における予測値が求まる(第2のステップ)。ここで、モデルは、流動床11に吹き込まれる空気量(以下、「押込空気量」と称する。)、熱分解ガス化炉10への給塵量としての給塵機速度(以下、「給塵機速度」と称する。)、ボイラ30に備えられた蒸気弁32の開度(以下、「蒸気弁開度」と称する。)を入力とし、流動床温度、ボイラドラム圧力、蒸気流量を出力とし、その他観測量として熱分解ガス化炉の炉内圧力を含んでなる。このモデルは次式で表される。
【0036】
【数2】
【0037】
ここで、操作量不変時における制御量の変動分Δy0(k+i)を用いて、j≧0のときΔu(k+j)=0とすれば、上述の式(数2)で表されるモデルを用いて、次式により、操作量不変時における制御量の変動分Δy0(k+i)が求まる。なお、次式では、観測量である熱分解ガス化炉の炉内圧力も現時刻以降の値も必要になるが、この炉内圧力の現時刻以降の値は別のモデルを使って推定している。
【0038】
【数3】
【0039】
次に、ステップS4で、制御量差分計算部7及び操作量不変時制御量偏差計算部8において、ステップS2で求めた目標軌道yr(k+i)と、ステップS3で求めた操作量不変時における制御量の変動分Δy0(k+i)と、現時点における制御量の実測値y(k)(流動床温度、ボイラドラム圧力、蒸気流量の実測値を要素に持つベクトル)とから、操作量不変時における制御量と目標軌道との偏差Δye(k+i)を次式により計算する(第3のステップ)。
【0040】
【数4】
【0041】
次に、ステップS5で、制約条件設定部5において、操作入力Δu(k+i)に対し、制約条件を設定する。例えば、操作入力の上下限制約、変動幅の上下限制約は、次式で表される。
【0042】
【数5】
【0043】
また、制御量に関する制約条件なども操作量の関数として表されるから、これらの制約条件はすべて、次式の形に帰着することができる。
【0044】
【数6】
【0045】
ここで、流動床温度が下限値以下である場合は、制約条件設定部5で、未来の有限区間(i=Ps,・・・,Pe)において流動床温度が下限値以上であるという以下の制約条件式を付け加える。
【0046】
【数7】
【0047】
式(数3)を上記の制約条件式(数7)に代入すると、次式が得られ、数6のAΔu≦bの形に帰着できることが分かる。なお、流動床温度の下限値TBLは、そのときの廃棄物性状に合わせて設定すると効果的である。なぜなら、水分を含んだごみであるほど、流動床温度が急低下しやすく、逆に、水分を含まないごみであるほど、流動床温度が急低下しにくいためである。よって、水分を含んだごみであるほど下限値TBLを、流動床温度の下限(即ち、ガス化が促進されず、発熱量よりも吸塵量が大きくなり続け、流動床温度が急低下し続け、流動床の回復が困難となってしまう温度)よりも余裕を持って高めに設定し、水分を含まないごみであるほど下限値TBLを、低めに設定することで、無理なく流動床の温度を目標値に近づけるように操作した方が、流動床温度が下限まで低下するリスクを小さくできる。
【0048】
【数8】
【0049】
次に、ステップS6で、評価関数設定部6において、評価関数を設定する。まず、式(数3)で表されたモデルから、現時点以降の操作入力が制御量に及ぼす影響を表す部分Δy+(k+i)を抽出すると、次式となる。
【0050】
【数9】
【0051】
ここで、流動床温度が下限値より高い場合、制御の目的は、操作量不変更時における制御量と目標軌道との偏差Δye(k+i)を補償するための偏差入力Δu(k)を求めることである。そのためには、操作量不変更時における制御量と目標軌道との偏差Δye(k+i)と現時点以降の操作入力が制御量に及ぼす影響を表す部分Δy+(k+i)が、未来の一定区間において、できるだけ一致すれば良いから、評価関数設定部6で設定する評価関数は次式となる。
【0052】
【数10】
【0053】
一方、流動床温度が下限値以下の場合には、流動床温度はステップS5の制約条件式(数8)を満たせば良く、目標軌道に一致させる必要はない。したがって、評価関数設定部6で設定する評価関数は次式とすればよい。即ち、次式では、流動床温度に関する項を除いた制御量ベクトルの偏差に対する2×2の重み係数行列Q2にT23が乗じられる。これは、数10の制御量ベクトルの偏差に対する3×3の重み係数行列Q3の1行目の要素である流動床温度に関する項を0倍して除くことと同じであり、流動床温度に関する項を除くことで、流動床温度が評価関数に影響を及ぼさないようにされている。
【0054】
【数11】
【0055】
次に、ステップS7において、上記のステップS5で設定した制約条件式のもとで、上記のステップS6で設定した評価関数Jを最小化する制御入力偏差量Δu(k)を求める。即ち、流動床温度が下限値より高い場合には、数6で与えられる制約条件式のもとで、数10で与えられる評価関数Jを最小化する制御入力偏差量Δu(k)を求めればよい。一方、流動床温度が下限値以下の場合には、数6及び数8で与えられる制約条件式のもとで、数11で与えられる評価関数Jを最小化する制御入力偏差量Δu(k)を求めればよい。これらの問題は二次計画問題として解かれ、現時点における制御入力偏差量Δu(k)が求まる。
【0056】
次に、ステップS8において、ステップS7で求めた制御入力偏差量Δu(k)を、前時点の操作量u(k−1)に加算することによって、現時点における最適化された操作量u(k)を求める(第4のステップ)。つまり、次式によって、現時点における押込空気量、給塵機速度、蒸気弁開度を求める。
【0057】
【数12】
【0058】
次に、ステップS9において、ステップS8で求めた操作量u(k)を制御対象Aに入力する。つまり、操作量u(k)に基づいて、押込空気量、給塵機速度、蒸気弁開度を操作する。
【0059】
ステップS9が終了するとステップS1に戻り、以上のステップS1からステップS9までの処理を制御周期ごとに繰り返す。
【0060】
次に、図5及び図6に基づいて、本実施形態に係る制御方法を用いた場合の実験結果について説明する。図5は従来の制御方法を用いた場合の制御結果を示す図である。図6は本実施形態に係る制御方法を用いた場合の制御結果を示す図である。
【0061】
図5に示す従来技術では、流動床温度が急低下するような給塵外乱(突発的過剰供給)を加えた場合、流動床温度を目標値に制御しようとして、給塵機速度を大幅に低下させている。その結果、溶融炉温度が一時的に低下する場合があることが分かる。一方、図6に示す本実施形態では、流動床温度が急低下したような場合でも、給塵機速度を急減させることなく、流動床温度を徐々に回復できることが分かる。その結果、溶融炉温度の一時的な低下も最小限に抑えられていることが分かる。
【0062】
以上に説明したように、本実施形態に係る熱分解ガス化溶融処理プラントの制御方法及び装置、並びにプログラムは、モデル予測制御を用いて、多変数モデルを使って制御量の未来の挙動を予測し、操業の制約条件を考慮した上で操作入力を最適化する上で、流動床温度に応じて制約条件および評価関数を切り替えているため、下記の利点を有している。
【0063】
流動床温度が下限値以下になった場合においても、モデルにより予測を行ない、未来の流動床温度が下限値以上になることを制約条件に加えているため、流動床温度の回復が補償される。
【0064】
流動床温度が下限値以下になった場合、流動床温度を評価関数に入れておらず、流動床温度を無理に目標値に回復させようとしていない。したがって、給塵機速度を急減させて、一時的な低負荷を招くようなことが少なく、溶融炉をはじめ、ボイラドラム圧力、蒸気流量などが一時的に低下しにくい。また、流動床温度を目標値に合わせようとするあまり、他の制御量が犠牲になることが少ない。
【0065】
流動床温度が下限値以下になった場合、流動床温度の目標軌道自体を定めていない。したがって、流動床温度を無理に目標軌道に合わせようとすることがなく、その時の状態に合わせて(早く回復できるときには早く、ゆっくり回復するときはゆっくりと)、流動床温度を回復させることができる。
【0066】
以上のように、本実施形態に係る熱分解ガス化溶融処理プラントの制御方法によれば、流動床温度が下限値以下になった場合でも、流動床温度の回復を補償しながら、溶融炉温度、更には他の制御量(ボイラドラム圧力や蒸気流量)の変動を抑制することができる。
【0067】
以上、本発明の好適な実施形態について説明したが、本発明はその趣旨を超えない範囲において変更が可能である。
【0068】
本実施の形態では、操作量として押込空気量と給塵機速度と蒸気弁開度を操作量として用い、制御量として流動床温度とボイラドラム圧力と蒸気流量を用い、さらに、観測量として熱分解ガス化炉の炉内圧力を用いたが、それに限られない。これは、平均的に見れば、実際の給塵量は、給塵機速度におよそ比例するが、給塵量の短周期的な変動は、給塵機速度を一定にしていても起こり得るものであり、より正確な制御量の挙動予測のためには、実際の給塵量の変動を反映したモデルを使用する必要がある。そこで、実際の給塵量の変動に対して、熱分解ガス化炉の炉内圧力は、制御量より早くその影響が現れるため、本実施形態では、実際の給塵量と相関があるものとして、熱分解ガス化炉の炉内圧力を制御量の挙動を予測する観測量として用いた。しかし、同様の理由から、熱分解ガス化炉の炉内圧力の他、排ガス流量などでも実際の給塵量を把握することができる。また、給塵機への供給電流や誘引送風機の電流でも、給塵外乱を検出することができ、実際の給塵量を反映した予測をおこなうことができる。但し、操作量の少なくともひとつが流動床温度に影響を与えるもの(熱分解ガス化炉への給塵量、廃棄物のカロリー、流動床に吹き込まれる空気量および空気温度、電気ヒータの温度、補助燃料量等)であることが必要である。また、制御量が少なくとも2つ以上であるとともに、そのうち1つが流動床温度であることが必要である。
【0069】
また、熱分解ガス化溶融炉では、従来の焼却炉に比べて安定領域が狭いため、制約条件を炉の状態に応じて設定した方が、より安定な制御システムを構築できる。即ち、上記の流動床温度に応じた制約条件の他にも、ごみ質(カロリー)や流動床温度、溶融炉20の温度の状況に応じた制約条件を更に設定することによって、より安定な制御システムを構築できる。
【0070】
なお、制御量として溶融炉の温度を用いる場合、溶融炉の温度は、熱電対により計測されることが通常であるが、放射温度計や輝度センサなど電磁波を利用するセンサを使用することが望ましい。熱電対による温度計測は、温度変化に対する応答性が悪く、遅れ時間も無視できず、制御性能を悪化させる要因となる。特に溶融炉はいったん温度が低下してスラグの溶融が停止してしまうと再び溶融させるのに手間がかかるだけでなく、最悪の場合、スラグ下流口23が閉塞する危険性があるため、この計測遅れ時間が致命的な結果を招きかねない。従って、電磁波を利用するセンサを使用すれば、ほとんど計測遅れ時間がないため、制御性能を向上することができ、安定溶融を維持することができる。
【0071】
また、上述の実施形態では、操作量不変時の制御量変動分を予測計算しているが、操作量を変えたときの制御量変動分を予測計算してもよい。
【0072】
更に、モデル予測制御手法において、制御量の現時点以降における予測値を求めるに当たって、給塵機への供給電流、キルン炉の炉内圧力、溶融炉から排出される排ガス流量、及び、誘引送風機の電流が考えられる。
【0073】
また、熱分解ガス化溶融処理プラントの制御プログラムは、記憶部のROMに予め読み出し専用に書き込まれていても良いし、CD等の記録媒体に記録されたものが必要時に読み出されて記憶部に書き込まれても良いし、さらにはインターネット等の電気通信回線を介して伝送されて記憶部に書き込まれても良い。
【図面の簡単な説明】
【0074】
【図1】熱分解ガス化溶融処理プラントの部分概略図である。
【図2】本実施の形態に係る制御装置のブロック線図である。
【図3】本実施の形態に係る制御方法のフローチャートである。
【図4】目標軌道の設定方法を表す一例の図である。
【図5】従来の制御方法を行った場合の実験結果である。
【図6】本実施の形態による制御方法を行った場合の実験結果である。
【符号の説明】
【0075】
1 制御装置
2 目標軌道生成部
3 操作量不変時制御量変動分計算部
4 操作量最適化計算部
5 制約条件設定部
6 評価関数設定部
7 制御量差分計算部
8 操作量不変時制御量偏差計算部
10 熱分解ガス化炉
11 流動床
12 ホッパ
13 給塵機
20 溶融炉
21 旋回流溶融炉
22 供給口
23 スラグ下流口
30 ボイラ
31 ボイラドラム
32 蒸気弁
40 熱分解ガス化溶融処理プラント
【技術分野】
【0001】
本発明は、熱分解ガス化溶融処理プラントの制御方法及び装置、並びにプログラムに関するものである。特に、未来の挙動を予測しながら熱分解ガス化溶融処理プラントを制御する熱分解ガス化溶融処理プラントの制御方法及び装置、並びにプログラムに関する。
【背景技術】
【0002】
近年、都市ごみなどの廃棄物の発熱量は増加の一途をたどり、最終処分地容量の逼迫や二次公害(地下水汚染)の問題、法規制の強化などの関係から、廃棄物の溶融による減容化、固定化が進められている。さらに、ダイオキシン類などの微量汚染物質の抑制など、廃棄物処理に要求される課題が多い。このような状況において、廃棄物を還元雰囲気で熱分解ガス化し、発生した可燃ガスを高温で燃焼し、焼却残渣を溶融する熱分解ガス化溶融処理プラントが注目されている。この熱分解ガス化溶融処理プラントには、給塵機により廃棄物を投入して底部に流動粒子を備えた流動層内で熱分解する流動床ガス化炉と、この流動床ガス化炉から排出される熱分解ガスを燃焼して灰分を溶融する溶融炉とを有しているものがある。
【0003】
熱分解ガス化溶融処理プラントには、以下のような特徴がある。
1.廃棄物の持つエネルギーを利用して灰の溶融を可能にし、焼却残渣の減容化、再資源化が可能となる。
2.低温熱分解により有価金属を回収することが可能となる。
3.低空気比が可能なことから、装置をコンパクトにすることが可能となる。
4.溶融炉での高温燃焼により、ダイオキシン類などの微量有害物質の抑制が可能となる。
【0004】
熱分解ガス化溶融処理プラントの主な操作量としては、例えば、廃棄物を投入する量である給塵量(例えば、給塵機速度)やガス化溶融炉の流動床に空気を送り込む量である押込空気量が挙げられる。従来の技術においては、これらの操作量の操作はオペレータの手動操作で行われるか、単独の制御ループを組み合わせて行われることが基本となっていた。また、熱分解ガス化溶融処理プラントの後段に廃熱ボイラを設置し、熱回収を図るプラントにおいては、従来から、ボイラ出力側の蒸気弁の開度を調整し、ボイラドラム圧力を自動制御により一定にしていた。そして、これらの方法によって、流動床ガス化炉の流動床や熱分解ガス化溶融処理プラントの出口付近の温度、溶融炉の温度、あるいはボイラからの蒸気流量などを安定にすることが考えられていた。しかし、熱分解ガス化溶融処理プラントは、流動床が還元雰囲気に保たれており、熱分解ガス化反応は給塵量と押込空気量の微妙なバランスの上に成り立っているため、酸化雰囲気でごみを燃焼させる流動床焼却炉に比べて、操作の難しい制御対象である。さらに、安定してガス化を促進するには、底部に備えられた流動粒子の砂層温度(即ち、流動床の温度)を適切範囲に保つ必要があり、操作入力の上下限制約も守る必要がある。したがって、従来の単純なフィードバック制御の組み合わせでは、実現できる性能に限界があった。
【0005】
そこで、近年、未来の挙動を予測しながら熱分解ガス化溶融処理プラントを制御する技術が開発されている。例えば、特許文献1には、熱分解ガス化溶融処理プラントの挙動を予測する予測モデルを用いて、1つ以上の制御量の未来挙動を予測し、その予測系列が望ましい系列(即ち、目標軌道)に近づくように、熱分解ガス化溶融処理プラントの制約条件を考慮しながら操作入力を最適化することによって、熱分解ガス化溶融処理プラントを安定させて制御する方法が開示されている。
【0006】
【特許文献1】特開2004−20049号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
ここで、前述の特許文献1の発明では、ガス化溶融処理プラントを安定して制御することができるが、突発的に廃棄物が過剰に入ってしまうような給塵外乱(「突発的過剰供給」と表現することにする)に対しては、流動床の容積が小さな小型炉において、以下のような動作が発生する可能性がある。即ち、小型炉において比較的水分の多い廃棄物の突発的過剰供給が起きると、砂層温度が急低下する傾向がある。特に、ガス化安定のため砂層温度を低く保っている場合は、砂層温度が下限を下回るおそれがあり、そのまま放っておくと、砂層温度が回復できない範囲まで低下するおそれもある。そこで、特許文献1の発明では、砂層温度が目標値にスムーズに回復するように、給塵機速度を一時的に低減させることになる。その結果、砂層温度は確実に急回復し、人の手を借りることなく自動的に運転を継続することができる。しかしながら、給塵負荷が一時的に不足するため、溶融炉の温度を始め、ボイラドラム圧力、蒸気流量等が一時的に低下し、スラグの粘性が一次的に大きくなる場合があった。
【0008】
本発明の目的は、突発的過剰供給等の給塵外乱により流動床の温度が急低下したような場合でも、給塵負荷を不足させずに流動床の温度を回復させることができる熱分解ガス化溶融処理プラントの制御方法及び装置、並びにプログラムを提供することである。
【課題を解決するための手段及び効果】
【0009】
本発明に係る熱分解ガス化溶融処理プラントの制御方法は、給塵機により投入された廃棄物を熱分解して熱分解ガスを生成する熱分解ガス化炉と、前記熱分解ガス化炉から排出される熱分解ガスを燃焼させると共にその熱を利用して焼却残渣を溶融する溶融炉とを有する熱分解ガス化溶融処理プラントの制御方法において、前記熱分解ガス化溶融処理プラントに係る制御量の現時点における実測値及び現時点以降の目標値から、前記制御量の目標軌道を定める第1のステップと、前記制御量の現時点以降における予測値を求める第2のステップと、前記目標軌道と前記予測値とのずれ量を求める第3のステップと、前記熱分解ガス化溶融処理プラントの状態に応じて設定された操業上の制約条件のもとで与えられる評価関数を考慮した上で、前記ずれ量が補償されるように前記熱分解ガス化溶融処理プラントに係る操作量を最適化する第4のステップと、を有し、前記操作量の少なくとも1つ以上が流動床の温度に影響を与える操作量であり、前記制御量が少なくとも2つ以上であるとともにその内1つが流動床の温度であり、且つ、前記流動床の温度が予め設定された下限値以下である場合に、未来の有限区間において前記流動床の温度が下限値以上となるように前記制約条件を設定するとともに、前記流動床の温度に関する項を除いて前記評価関数を設定することを特徴とする。
【0010】
本発明に係る熱分解ガス化溶融処理プラントの制御装置は、給塵機により投入された廃棄物を熱分解して熱分解ガスを生成する熱分解ガス化炉と、前記熱分解ガス化炉から排出される熱分解ガスを燃焼させると共にその熱を利用して焼却残渣を溶融する溶融炉とを有する熱分解ガス化溶融処理プラントの制御装置において、前記熱分解ガス化溶融処理プラントに係る制御量の現時点における実測値及び現時点以降の目標値から、前記制御量の目標軌道を定める第1の手段と、前記制御量の現時点以降における予測値を求める第2の手段と、前記目標軌道と前記予測値とのずれ量を求める第3の手段と、前記熱分解ガス化溶融処理プラントの状態に応じて設定された操業上の制約条件のもとで与えられる評価関数を考慮した上で、前記ずれ量が補償されるように前記熱分解ガス化溶融処理プラントに係る操作量を最適化する第4の手段と、を有し、前記操作量の少なくとも1つ以上が流動床の温度に影響を与える操作量であり、前記制御量が少なくとも2つ以上であるとともにその内1つが流動床の温度であり、且つ、前記流動床の温度が予め設定された下限値以下である場合に、未来の有限区間において前記流動床の温度が下限値以上となるように前記制約条件を設定するとともに、前記流動床の温度に関する項を除いて前記評価関数を設定することを特徴とする。
【0011】
本発明に係るプログラムは、コンピュータを上述したような熱分解ガス化溶融処理プラントの制御装置として機能させることが可能なプログラムである。
【0012】
これによると、突発的過剰供給等の吸塵外乱により流動床の温度が下限値以下となる場合に、未来の有限区間(例えば、5分先から10分先までの5分間)において流動床の温度が下限値を下回らない範囲となるような制約条件を追加することにより、流動床の温度が回復できない範囲にまで急低下することを防止するとともに、流動床の温度の回復を補償することができる。また、突発的過剰供給等の吸塵外乱により流動床の温度が下限値以下となる場合に、未来の有限区間において流動床の温度に関する項を取り除いた評価関数に切り替えて操作量を求めることにより、流動床の温度の目標軌道自体が定められず、流動床温度を無理に目標軌道に回復させようとしないため、吸塵機の供給負荷の一時的な低下を防止し、流動床の温度を目標値に合わせようとするあまりに他の制御量が犠牲になることを防止することができる。尚、流動床の温度に影響を与える操作量とは、例えば、熱分解ガス化炉への給塵量、廃棄物のカロリー、流動床に吹き込まれる空気量および空気温度、電気ヒータの温度、補助燃料量等が考えられる。
【0013】
本発明に係る熱分解ガス化溶融処理プラントの制御方法及び装置、並びにプログラムにおいて、前記下限値は、前記廃棄物の性状に応じて設定することが好ましい。
【0014】
これによると、廃棄物の性状に応じて下限値を設定することにより、流動床の温度が回復できない範囲にまで急低下することを防止するとともに、吸塵機の供給負荷の一時的な低下を防止して、無理なく流動床の温度を目標値に近づけるように操作量を決定することができる。例えば、水分を含んだ廃棄物の場合は流動床の温度が急低下する傾向が高いため下限値を高めに設定し、水分を含まない廃棄物の場合は流動床の温度が急低下する傾向が低いため下限値を低めに設定する。
【0015】
尚、本発明に係るプログラムは、CD−ROM(Compact Disc Read Only Memory)ディスク、フレキシブルディスク(FD)、MO(Magneto Optical)ディスクなどのリムーバブル型記録媒体や、ハードディスクなどの固定型記録媒体に記録して配布可能である他、有線又は無線の電気通信手段によってインターネットなどの通信ネットワークを介して配布可能である。ここで、コンピュータは、パーソナルコンピュータのような汎用型に限らず、特定用途を有する装置に組み込まれたものであってもよい。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照しつつ、本発明の好適な実施形態について説明する。
【0017】
まず、本発明の実施形態による制御方法及び装置、並びにプログラムを適用する熱分解ガス化溶融処理プラントの構成を、図1に基づいて説明する。図1は、熱分解ガス化溶融処理プラントの部分概略図を示すものである。
【0018】
図1に示すように、熱分解ガス化溶融処理プラント40は、熱分解ガス化炉10と、溶融炉20と、ボイラ30とから構成されている。
【0019】
熱分解ガス化炉10には、被焼却物である廃棄物(都市ごみ、産業廃棄物など)を投入するホッパ12が設けられており、ホッパ12に投入された廃棄物は、給塵機13によって、後述する流動床11に供給される。なお、この給塵機13によって供給される廃棄物の量(給塵量)は、給塵機13の回転数を調節することにより増減できるようになっている。また、熱分解ガス化炉10には、底部に流動粒子(例えば、砂)からなる流動床11が設けられている。流動床11の下部からは図示されない送風機により流動空気が吹き込まれ、流動床11の流動粒子及び給塵機13により供給された廃棄物が流動撹拌される。なお、この熱分解ガス化炉10は、流動床11の流動粒子の流動層温度(砂層温度)が、アルミニウムの融点(600℃)以下で、鉄やアルミニウムなどの金属を未酸化状態で回収するため、約500〜600℃となるように運転される。廃棄物は、流動床11内で空気比0.2〜0.3程度の還元雰囲気の中で熱分解され、熱分解ガス(可燃性ガス)や未燃固形分(チャー、灰分など)となって、後述する溶融炉20に出て行く。
【0020】
溶融炉20は、熱分解ガス化炉10で生成された熱分解ガス、未燃固形分を約1300〜1400℃の高温で燃焼させる。また、溶融炉20は、熱分解ガス化炉10に引き続いた部分が旋回流溶融炉21になっており、後述する燃焼用空気が図の矢印に示すように強旋回される。未燃の熱分解ガスは、燃焼用空気によって高温燃焼する。燃焼用空気は、図示されない空気予熱器により予熱されて供給口22から供給される。なお、ごみ顕熱が不足する場合は、燃焼用空気の他に重油も使用する。灰分は溶融し、スラグが生成されるとともに、ダイオキシン類を分解する。溶融スラグは、スラグ下流口23より炉外へと回収されることにより有用な資源として利用される。
【0021】
ボイラ30は、熱分解ガス化炉10及び溶融炉20に付属して設置されており、ガス化溶融のプロセスで発生した熱を回収する。ボイラ30は、ガス化溶融のプロセスで発生した熱を利用して水を蒸発させるボイラドラム31、及び、ボイラドラム31の圧力(以下、「ボイラドラム圧力」と称する。)やボイラドラム31から排出される蒸気流量(以下、「蒸気流量」と称する。)を調節する蒸気弁32を備えている。このボイラ30で発生した蒸気の持つエネルギーは、図示されない蒸気タービン、発電機によって電気エネルギーに変換され、余剰電力や設備所要電力として回収される。また、ボイラ30の下流側には、図示されないガス冷却装置、排ガス処理装置(バグフィルタ等)、誘引送風機、煙突が順に設置されている。ここで、誘引送風機(IDF)は、炉内の排ガスを誘引して煙突から放出するための送風機であり、炉内の圧力が高くなると回転数を上げて多量のガスを誘引するなど、炉内圧を一定(負圧)に保つために動作している。
【0022】
次に、本発明の実施形態による制御装置を、図2に基づいて説明する。図2は、本実施形態に係る制御装置のブロック線図を示すものである。なお、本実施形態では、制御手法としてモデル予測制御手法を用いる。
【0023】
制御装置1は、目標軌道生成部2と、操作量不変時制御量変動分計算部3と、操作量最適化計算部4と、制約条件設定部5と、評価関数設定部6と、制御量差分計算部7と、操作量不変時制御量偏差計算部8とを備えている。
【0024】
目標軌道生成部(第1の手段)2は、制御量の目標値r(k+i)と、制御量の実測値y(k)に基づいて、目標軌道yr(k+i)を設定する。
【0025】
操作量不変時制御量変動分計算部(第2の手段)3は、制御量の実測値y(k)、操作入力u(k)、その他制御対象の観測量w(k)の履歴から、以後操作量を変更しなかった場合における制御量の変動分(現時点の値からの変動分)Δy0(k+i)を計算する。操作量不変時における制御量の変動分Δy0(k+i)を現時点の制御量の実測値y(k)に加算することによって、制御量の現時点以降における予測値が求まる。この操作量不変時における制御量の変動分Δy0(k+i)の計算に際しては、使用するモデルの種類(ARXモデル、ステップ応答モデル、プログラムからなるシミュレータなど)や操作入力の数(単入力か多入力か)によって、操作入力u(k)を必要としなかったり、制御量の実測値y(k)を必要としなかったり、あるいは、その他制御対象の観測量w(k)の現時刻以降の挙動を推定するモデルを必要としたり、その他、外乱の影響を推定する機能を含んでも良い。なお、本実施形態では、その他制御対象の観測量w(k)として熱分解ガス化炉10の炉内圧力の値を使っている。
【0026】
また、制御量差分計算部7は、目標軌道生成部2で設定した目標軌道yr(k+i)と比較した場合の、制御量の実測値y(k)との差分yr(k+i)−y(k)を計算する。
【0027】
操作量不変時制御量偏差計算部(第3の手段)8は、制御量差分計算部7が求めた、目標軌道yr(k+i)と制御量の実測値y(k)との差分yr(k+i)−y(k)と、操作量不変時制御量変動分計算部3で求めた操作量不変時における制御量の変動分Δy0(k+i)とから、操作量不変時における制御量と目標軌道との偏差Δye(k+i)(目標軌道と予測値とのずれ量)を計算する。
【0028】
制約条件設定部5は、熱分解ガス化溶融処理プラント40の状況に応じて制約条件を設定する。制約条件としては、例えば、操作入力や制御量の上下限制約、操作入力の変動量の制約、熱分解ガス化炉10や溶融炉20の出口温度など、直接の制御量ではないが、操業上定められている制約などがあり、いずれも直接あるいは間接的に操作入力の制約条件として表すことができる。また、これらの制約条件を目標処理量や廃棄物の質(ごみ質)、流動床温度、溶融状態(溶融炉温度)、ボイラドラム31の圧力などによって変更することにより、熱分解ガス化溶融処理プラント40の状況に合わせた操作が可能となり、より安定した自動操業が実現できる。ここで、流動床11の温度(以下、「流動床温度」と称する。)が下限値以下である場合には、未来の有限区間(例えば、5分先から10分先までの5分間)において流動床温度が下限値以上であるという制約条件を付け加える。従って、流動床温度が下限値以下の場合には、流動床温度が現時点より低下しない範囲で操作量を求めることとなる。尚、流動床温度の下限値とは、温度がそれ以下になるとガス化が安定しない(あるいは操業が停止してしまう)値ではなく、ある程度余裕をもった値である。下限値を下回っても操業上全く問題ないが、下限値からさらに温度が急低下するような場合には、急操作を必要とする。また、未来の有限区間は、無駄時間や流動床温度の応答速度等を考慮して(少なくとも、無駄時間の分だけ先の時間)、予め設定する。
【0029】
評価関数設定部6は、操作量不変更時における制御量と目標軌道との偏差Δye(k+i)と、後述する現時点以降の操作入力が制御量に及ぼす影響を表す部分Δy+(k+i)が、未来の一定区間において、できるだけ一致するような評価関数を設定する。但し、流動床温度が下限値以下の場合には、流動床温度の項を除いた評価関数を設定する。従って、流動床温度が下限値以下の場合に求める操作量は、「流動床温度を定められた標準軌道に沿って速やかに回復させる」ものではなく、「流動床温度が回復傾向にあるのであれば、回復の仕方は問わない」とするものであって、供給負荷の一時的な低下を防ごうとするものとなる。
【0030】
操作量最適化計算部(第4の手段)4は、流動床温度に応じて、制約条件設定部5で設定された制約条件と、評価関数設定部6で設定された評価関数とに基づいて、操作量不変時制御量偏差計算部8で計算された操作量不変時における制御量と目標軌道との偏差Δye(k+i)を補償するための制御入力偏差量Δu(k)を求める。この制御入力偏差量Δu(k)を前制御周期の操作量u(k−1)に加算することによって、制御対象Aに入力する最適化された操作入力(操作量)u(k)が求まる。
【0031】
次に、本発明の実施形態による制御方法を、図3のフローチャートに基づいて説明する。図3は、本実施形態に係る制御方法のフローチャートを示すものである。なお、本実施形態では、上述の制御装置と同様、制御手法としてモデル予測制御手法を用いる。
【0032】
まず、ステップS1で、制御量の目標値r(k+i)を設定する。ここで、目標値r(k+i)は、流動床温度、ボイラドラム圧力、蒸気流量のそれぞれの目標値を要素とするベクトルである。
【0033】
次に、ステップS2で、制御量の目標値r(k+i)と制御量の実測値y(k)とに基づいて、目標軌道生成部2が目標軌道yr(k+i)を設定する(第1のステップ)。目標軌道yr(k+i)の設定方法としては、例えば、図4に示すものがある。これは、次式のように設定するものであり、制御量の実測値y(k)から制御量の目標値r(k+i)に一定の割合で近づけていくものである。なお、次式の行列Cを3×3の零行列にすれば、目標軌道yr(k+i)は制御量の目標値r(k+i)そのものに一致する。
【0034】
【数1】
【0035】
次に、ステップS3で、操作量不変時制御量変動分計算部3が、モデルを用いて操作量不変時における制御量の変動分Δy0(k+i)を計算する。操作量不変時における制御量の変動分Δy0(k+i)を現時点の制御量の実測値y(k)に加算することによって、制御量の現時点以降における予測値が求まる(第2のステップ)。ここで、モデルは、流動床11に吹き込まれる空気量(以下、「押込空気量」と称する。)、熱分解ガス化炉10への給塵量としての給塵機速度(以下、「給塵機速度」と称する。)、ボイラ30に備えられた蒸気弁32の開度(以下、「蒸気弁開度」と称する。)を入力とし、流動床温度、ボイラドラム圧力、蒸気流量を出力とし、その他観測量として熱分解ガス化炉の炉内圧力を含んでなる。このモデルは次式で表される。
【0036】
【数2】
【0037】
ここで、操作量不変時における制御量の変動分Δy0(k+i)を用いて、j≧0のときΔu(k+j)=0とすれば、上述の式(数2)で表されるモデルを用いて、次式により、操作量不変時における制御量の変動分Δy0(k+i)が求まる。なお、次式では、観測量である熱分解ガス化炉の炉内圧力も現時刻以降の値も必要になるが、この炉内圧力の現時刻以降の値は別のモデルを使って推定している。
【0038】
【数3】
【0039】
次に、ステップS4で、制御量差分計算部7及び操作量不変時制御量偏差計算部8において、ステップS2で求めた目標軌道yr(k+i)と、ステップS3で求めた操作量不変時における制御量の変動分Δy0(k+i)と、現時点における制御量の実測値y(k)(流動床温度、ボイラドラム圧力、蒸気流量の実測値を要素に持つベクトル)とから、操作量不変時における制御量と目標軌道との偏差Δye(k+i)を次式により計算する(第3のステップ)。
【0040】
【数4】
【0041】
次に、ステップS5で、制約条件設定部5において、操作入力Δu(k+i)に対し、制約条件を設定する。例えば、操作入力の上下限制約、変動幅の上下限制約は、次式で表される。
【0042】
【数5】
【0043】
また、制御量に関する制約条件なども操作量の関数として表されるから、これらの制約条件はすべて、次式の形に帰着することができる。
【0044】
【数6】
【0045】
ここで、流動床温度が下限値以下である場合は、制約条件設定部5で、未来の有限区間(i=Ps,・・・,Pe)において流動床温度が下限値以上であるという以下の制約条件式を付け加える。
【0046】
【数7】
【0047】
式(数3)を上記の制約条件式(数7)に代入すると、次式が得られ、数6のAΔu≦bの形に帰着できることが分かる。なお、流動床温度の下限値TBLは、そのときの廃棄物性状に合わせて設定すると効果的である。なぜなら、水分を含んだごみであるほど、流動床温度が急低下しやすく、逆に、水分を含まないごみであるほど、流動床温度が急低下しにくいためである。よって、水分を含んだごみであるほど下限値TBLを、流動床温度の下限(即ち、ガス化が促進されず、発熱量よりも吸塵量が大きくなり続け、流動床温度が急低下し続け、流動床の回復が困難となってしまう温度)よりも余裕を持って高めに設定し、水分を含まないごみであるほど下限値TBLを、低めに設定することで、無理なく流動床の温度を目標値に近づけるように操作した方が、流動床温度が下限まで低下するリスクを小さくできる。
【0048】
【数8】
【0049】
次に、ステップS6で、評価関数設定部6において、評価関数を設定する。まず、式(数3)で表されたモデルから、現時点以降の操作入力が制御量に及ぼす影響を表す部分Δy+(k+i)を抽出すると、次式となる。
【0050】
【数9】
【0051】
ここで、流動床温度が下限値より高い場合、制御の目的は、操作量不変更時における制御量と目標軌道との偏差Δye(k+i)を補償するための偏差入力Δu(k)を求めることである。そのためには、操作量不変更時における制御量と目標軌道との偏差Δye(k+i)と現時点以降の操作入力が制御量に及ぼす影響を表す部分Δy+(k+i)が、未来の一定区間において、できるだけ一致すれば良いから、評価関数設定部6で設定する評価関数は次式となる。
【0052】
【数10】
【0053】
一方、流動床温度が下限値以下の場合には、流動床温度はステップS5の制約条件式(数8)を満たせば良く、目標軌道に一致させる必要はない。したがって、評価関数設定部6で設定する評価関数は次式とすればよい。即ち、次式では、流動床温度に関する項を除いた制御量ベクトルの偏差に対する2×2の重み係数行列Q2にT23が乗じられる。これは、数10の制御量ベクトルの偏差に対する3×3の重み係数行列Q3の1行目の要素である流動床温度に関する項を0倍して除くことと同じであり、流動床温度に関する項を除くことで、流動床温度が評価関数に影響を及ぼさないようにされている。
【0054】
【数11】
【0055】
次に、ステップS7において、上記のステップS5で設定した制約条件式のもとで、上記のステップS6で設定した評価関数Jを最小化する制御入力偏差量Δu(k)を求める。即ち、流動床温度が下限値より高い場合には、数6で与えられる制約条件式のもとで、数10で与えられる評価関数Jを最小化する制御入力偏差量Δu(k)を求めればよい。一方、流動床温度が下限値以下の場合には、数6及び数8で与えられる制約条件式のもとで、数11で与えられる評価関数Jを最小化する制御入力偏差量Δu(k)を求めればよい。これらの問題は二次計画問題として解かれ、現時点における制御入力偏差量Δu(k)が求まる。
【0056】
次に、ステップS8において、ステップS7で求めた制御入力偏差量Δu(k)を、前時点の操作量u(k−1)に加算することによって、現時点における最適化された操作量u(k)を求める(第4のステップ)。つまり、次式によって、現時点における押込空気量、給塵機速度、蒸気弁開度を求める。
【0057】
【数12】
【0058】
次に、ステップS9において、ステップS8で求めた操作量u(k)を制御対象Aに入力する。つまり、操作量u(k)に基づいて、押込空気量、給塵機速度、蒸気弁開度を操作する。
【0059】
ステップS9が終了するとステップS1に戻り、以上のステップS1からステップS9までの処理を制御周期ごとに繰り返す。
【0060】
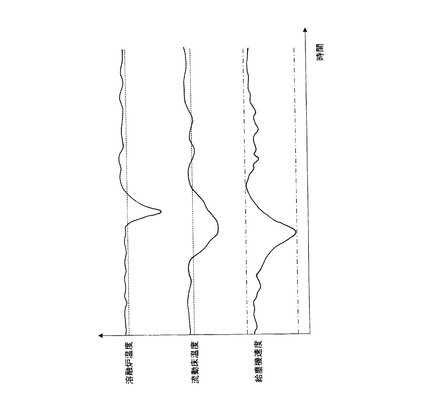
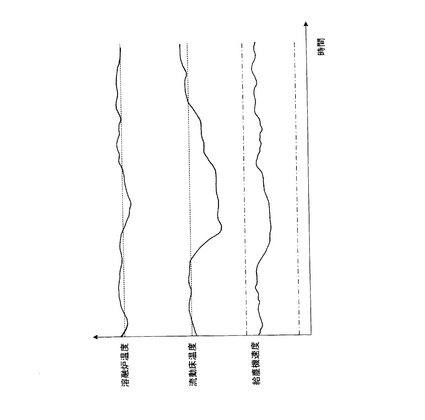
次に、図5及び図6に基づいて、本実施形態に係る制御方法を用いた場合の実験結果について説明する。図5は従来の制御方法を用いた場合の制御結果を示す図である。図6は本実施形態に係る制御方法を用いた場合の制御結果を示す図である。
【0061】
図5に示す従来技術では、流動床温度が急低下するような給塵外乱(突発的過剰供給)を加えた場合、流動床温度を目標値に制御しようとして、給塵機速度を大幅に低下させている。その結果、溶融炉温度が一時的に低下する場合があることが分かる。一方、図6に示す本実施形態では、流動床温度が急低下したような場合でも、給塵機速度を急減させることなく、流動床温度を徐々に回復できることが分かる。その結果、溶融炉温度の一時的な低下も最小限に抑えられていることが分かる。
【0062】
以上に説明したように、本実施形態に係る熱分解ガス化溶融処理プラントの制御方法及び装置、並びにプログラムは、モデル予測制御を用いて、多変数モデルを使って制御量の未来の挙動を予測し、操業の制約条件を考慮した上で操作入力を最適化する上で、流動床温度に応じて制約条件および評価関数を切り替えているため、下記の利点を有している。
【0063】
流動床温度が下限値以下になった場合においても、モデルにより予測を行ない、未来の流動床温度が下限値以上になることを制約条件に加えているため、流動床温度の回復が補償される。
【0064】
流動床温度が下限値以下になった場合、流動床温度を評価関数に入れておらず、流動床温度を無理に目標値に回復させようとしていない。したがって、給塵機速度を急減させて、一時的な低負荷を招くようなことが少なく、溶融炉をはじめ、ボイラドラム圧力、蒸気流量などが一時的に低下しにくい。また、流動床温度を目標値に合わせようとするあまり、他の制御量が犠牲になることが少ない。
【0065】
流動床温度が下限値以下になった場合、流動床温度の目標軌道自体を定めていない。したがって、流動床温度を無理に目標軌道に合わせようとすることがなく、その時の状態に合わせて(早く回復できるときには早く、ゆっくり回復するときはゆっくりと)、流動床温度を回復させることができる。
【0066】
以上のように、本実施形態に係る熱分解ガス化溶融処理プラントの制御方法によれば、流動床温度が下限値以下になった場合でも、流動床温度の回復を補償しながら、溶融炉温度、更には他の制御量(ボイラドラム圧力や蒸気流量)の変動を抑制することができる。
【0067】
以上、本発明の好適な実施形態について説明したが、本発明はその趣旨を超えない範囲において変更が可能である。
【0068】
本実施の形態では、操作量として押込空気量と給塵機速度と蒸気弁開度を操作量として用い、制御量として流動床温度とボイラドラム圧力と蒸気流量を用い、さらに、観測量として熱分解ガス化炉の炉内圧力を用いたが、それに限られない。これは、平均的に見れば、実際の給塵量は、給塵機速度におよそ比例するが、給塵量の短周期的な変動は、給塵機速度を一定にしていても起こり得るものであり、より正確な制御量の挙動予測のためには、実際の給塵量の変動を反映したモデルを使用する必要がある。そこで、実際の給塵量の変動に対して、熱分解ガス化炉の炉内圧力は、制御量より早くその影響が現れるため、本実施形態では、実際の給塵量と相関があるものとして、熱分解ガス化炉の炉内圧力を制御量の挙動を予測する観測量として用いた。しかし、同様の理由から、熱分解ガス化炉の炉内圧力の他、排ガス流量などでも実際の給塵量を把握することができる。また、給塵機への供給電流や誘引送風機の電流でも、給塵外乱を検出することができ、実際の給塵量を反映した予測をおこなうことができる。但し、操作量の少なくともひとつが流動床温度に影響を与えるもの(熱分解ガス化炉への給塵量、廃棄物のカロリー、流動床に吹き込まれる空気量および空気温度、電気ヒータの温度、補助燃料量等)であることが必要である。また、制御量が少なくとも2つ以上であるとともに、そのうち1つが流動床温度であることが必要である。
【0069】
また、熱分解ガス化溶融炉では、従来の焼却炉に比べて安定領域が狭いため、制約条件を炉の状態に応じて設定した方が、より安定な制御システムを構築できる。即ち、上記の流動床温度に応じた制約条件の他にも、ごみ質(カロリー)や流動床温度、溶融炉20の温度の状況に応じた制約条件を更に設定することによって、より安定な制御システムを構築できる。
【0070】
なお、制御量として溶融炉の温度を用いる場合、溶融炉の温度は、熱電対により計測されることが通常であるが、放射温度計や輝度センサなど電磁波を利用するセンサを使用することが望ましい。熱電対による温度計測は、温度変化に対する応答性が悪く、遅れ時間も無視できず、制御性能を悪化させる要因となる。特に溶融炉はいったん温度が低下してスラグの溶融が停止してしまうと再び溶融させるのに手間がかかるだけでなく、最悪の場合、スラグ下流口23が閉塞する危険性があるため、この計測遅れ時間が致命的な結果を招きかねない。従って、電磁波を利用するセンサを使用すれば、ほとんど計測遅れ時間がないため、制御性能を向上することができ、安定溶融を維持することができる。
【0071】
また、上述の実施形態では、操作量不変時の制御量変動分を予測計算しているが、操作量を変えたときの制御量変動分を予測計算してもよい。
【0072】
更に、モデル予測制御手法において、制御量の現時点以降における予測値を求めるに当たって、給塵機への供給電流、キルン炉の炉内圧力、溶融炉から排出される排ガス流量、及び、誘引送風機の電流が考えられる。
【0073】
また、熱分解ガス化溶融処理プラントの制御プログラムは、記憶部のROMに予め読み出し専用に書き込まれていても良いし、CD等の記録媒体に記録されたものが必要時に読み出されて記憶部に書き込まれても良いし、さらにはインターネット等の電気通信回線を介して伝送されて記憶部に書き込まれても良い。
【図面の簡単な説明】
【0074】
【図1】熱分解ガス化溶融処理プラントの部分概略図である。
【図2】本実施の形態に係る制御装置のブロック線図である。
【図3】本実施の形態に係る制御方法のフローチャートである。
【図4】目標軌道の設定方法を表す一例の図である。
【図5】従来の制御方法を行った場合の実験結果である。
【図6】本実施の形態による制御方法を行った場合の実験結果である。
【符号の説明】
【0075】
1 制御装置
2 目標軌道生成部
3 操作量不変時制御量変動分計算部
4 操作量最適化計算部
5 制約条件設定部
6 評価関数設定部
7 制御量差分計算部
8 操作量不変時制御量偏差計算部
10 熱分解ガス化炉
11 流動床
12 ホッパ
13 給塵機
20 溶融炉
21 旋回流溶融炉
22 供給口
23 スラグ下流口
30 ボイラ
31 ボイラドラム
32 蒸気弁
40 熱分解ガス化溶融処理プラント
【特許請求の範囲】
【請求項1】
給塵機により投入された廃棄物を熱分解して熱分解ガスを生成する熱分解ガス化炉と、前記熱分解ガス化炉から排出される熱分解ガスを燃焼させると共にその熱を利用して焼却残渣を溶融する溶融炉とを有する熱分解ガス化溶融処理プラントの制御方法において、
前記熱分解ガス化溶融処理プラントに係る制御量の現時点における実測値及び現時点以降の目標値から、前記制御量の目標軌道を定める第1のステップと、
前記制御量の現時点以降における予測値を求める第2のステップと、
前記目標軌道と前記予測値とのずれ量を求める第3のステップと、
前記熱分解ガス化溶融処理プラントの状態に応じて設定された操業上の制約条件のもとで与えられる評価関数を考慮した上で、前記ずれ量が補償されるように前記熱分解ガス化溶融処理プラントに係る操作量を最適化する第4のステップと、
を有し、
前記操作量の少なくとも1つ以上が流動床の温度に影響を与える操作量であり、前記制御量が少なくとも2つ以上であるとともにその内1つが流動床の温度であり、且つ、
前記流動床の温度が予め設定された下限値以下である場合に、未来の有限区間において前記流動床の温度が下限値以上となるように前記制約条件を設定するとともに、前記流動床の温度に関する項を除いて前記評価関数を設定することを特徴とする熱分解ガス化溶融処理プラントの制御方法。
【請求項2】
前記下限値は、前記廃棄物の性状に応じて設定することを特徴とする請求項1に記載の熱分解ガス化溶融処理プラントの制御方法。
【請求項3】
給塵機により投入された廃棄物を熱分解して熱分解ガスを生成する熱分解ガス化炉と、前記熱分解ガス化炉から排出される熱分解ガスを燃焼させると共にその熱を利用して焼却残渣を溶融する溶融炉とを有する熱分解ガス化溶融処理プラントの制御装置において、
前記熱分解ガス化溶融処理プラントに係る制御量の現時点における実測値及び現時点以降の目標値から、前記制御量の目標軌道を定める第1の手段と、
前記制御量の現時点以降における予測値を求める第2の手段と、
前記目標軌道と前記予測値とのずれ量を求める第3の手段と、
前記熱分解ガス化溶融処理プラントの状態に応じて設定された操業上の制約条件のもとで与えられる評価関数を考慮した上で、前記ずれ量が補償されるように前記熱分解ガス化溶融処理プラントに係る操作量を最適化する第4の手段と、
を有し、
前記操作量の少なくとも1つ以上が流動床の温度に影響を与える操作量であり、前記制御量が少なくとも2つ以上であるとともにその内1つが流動床の温度であり、且つ、
前記流動床の温度が予め設定された下限値以下である場合に、未来の有限区間において前記流動床の温度が下限値以上となるように前記制約条件を設定するとともに、前記流動床の温度に関する項を除いて前記評価関数を設定することを特徴とする熱分解ガス化溶融処理プラントの制御装置。
【請求項4】
前記下限値は、前記廃棄物の性状に応じて設定することを特徴とする請求項3に記載の熱分解ガス化溶融処理プラントの制御装置。
【請求項5】
給塵機により投入された廃棄物を熱分解して熱分解ガスを生成する熱分解ガス化炉と、前記熱分解ガス化炉から排出される熱分解ガスを燃焼させると共にその熱を利用して焼却残渣を溶融する溶融炉とを有する熱分解ガス化溶融処理プラントを制御するプログラムにおいて、
前記熱分解ガス化溶融処理プラントに係る制御量の現時点における実測値及び現時点以降の目標値から、前記制御量の目標軌道を定める第1の手段、
前記制御量の現時点以降における予測値を求める第2の手段、
前記目標軌道と前記予測値とのずれ量を求める第3の手段、
前記熱分解ガス化溶融処理プラントの状態に応じて設定された操業上の制約条件のもとで与えられる評価関数を考慮した上で、前記ずれ量が補償されるように前記熱分解ガス化溶融処理プラントに係る操作量を最適化する第4の手段、
としてコンピュータを機能させ、
前記操作量の少なくとも1つ以上が流動床の温度に影響を与える操作量であり、前記制御量が少なくとも2つ以上であるとともにその内1つが流動床の温度であり、且つ、
前記流動床の温度が予め設定された下限値以下である場合に、未来の有限区間において前記流動床の温度が下限値以上となるように前記制約条件を設定するとともに、前記流動床の温度に関する項を除いて前記評価関数を設定することを特徴とするプログラム。
【請求項6】
前記下限値は、前記廃棄物の性状に応じて設定することを特徴とする請求項5に記載のプログラム。
【請求項1】
給塵機により投入された廃棄物を熱分解して熱分解ガスを生成する熱分解ガス化炉と、前記熱分解ガス化炉から排出される熱分解ガスを燃焼させると共にその熱を利用して焼却残渣を溶融する溶融炉とを有する熱分解ガス化溶融処理プラントの制御方法において、
前記熱分解ガス化溶融処理プラントに係る制御量の現時点における実測値及び現時点以降の目標値から、前記制御量の目標軌道を定める第1のステップと、
前記制御量の現時点以降における予測値を求める第2のステップと、
前記目標軌道と前記予測値とのずれ量を求める第3のステップと、
前記熱分解ガス化溶融処理プラントの状態に応じて設定された操業上の制約条件のもとで与えられる評価関数を考慮した上で、前記ずれ量が補償されるように前記熱分解ガス化溶融処理プラントに係る操作量を最適化する第4のステップと、
を有し、
前記操作量の少なくとも1つ以上が流動床の温度に影響を与える操作量であり、前記制御量が少なくとも2つ以上であるとともにその内1つが流動床の温度であり、且つ、
前記流動床の温度が予め設定された下限値以下である場合に、未来の有限区間において前記流動床の温度が下限値以上となるように前記制約条件を設定するとともに、前記流動床の温度に関する項を除いて前記評価関数を設定することを特徴とする熱分解ガス化溶融処理プラントの制御方法。
【請求項2】
前記下限値は、前記廃棄物の性状に応じて設定することを特徴とする請求項1に記載の熱分解ガス化溶融処理プラントの制御方法。
【請求項3】
給塵機により投入された廃棄物を熱分解して熱分解ガスを生成する熱分解ガス化炉と、前記熱分解ガス化炉から排出される熱分解ガスを燃焼させると共にその熱を利用して焼却残渣を溶融する溶融炉とを有する熱分解ガス化溶融処理プラントの制御装置において、
前記熱分解ガス化溶融処理プラントに係る制御量の現時点における実測値及び現時点以降の目標値から、前記制御量の目標軌道を定める第1の手段と、
前記制御量の現時点以降における予測値を求める第2の手段と、
前記目標軌道と前記予測値とのずれ量を求める第3の手段と、
前記熱分解ガス化溶融処理プラントの状態に応じて設定された操業上の制約条件のもとで与えられる評価関数を考慮した上で、前記ずれ量が補償されるように前記熱分解ガス化溶融処理プラントに係る操作量を最適化する第4の手段と、
を有し、
前記操作量の少なくとも1つ以上が流動床の温度に影響を与える操作量であり、前記制御量が少なくとも2つ以上であるとともにその内1つが流動床の温度であり、且つ、
前記流動床の温度が予め設定された下限値以下である場合に、未来の有限区間において前記流動床の温度が下限値以上となるように前記制約条件を設定するとともに、前記流動床の温度に関する項を除いて前記評価関数を設定することを特徴とする熱分解ガス化溶融処理プラントの制御装置。
【請求項4】
前記下限値は、前記廃棄物の性状に応じて設定することを特徴とする請求項3に記載の熱分解ガス化溶融処理プラントの制御装置。
【請求項5】
給塵機により投入された廃棄物を熱分解して熱分解ガスを生成する熱分解ガス化炉と、前記熱分解ガス化炉から排出される熱分解ガスを燃焼させると共にその熱を利用して焼却残渣を溶融する溶融炉とを有する熱分解ガス化溶融処理プラントを制御するプログラムにおいて、
前記熱分解ガス化溶融処理プラントに係る制御量の現時点における実測値及び現時点以降の目標値から、前記制御量の目標軌道を定める第1の手段、
前記制御量の現時点以降における予測値を求める第2の手段、
前記目標軌道と前記予測値とのずれ量を求める第3の手段、
前記熱分解ガス化溶融処理プラントの状態に応じて設定された操業上の制約条件のもとで与えられる評価関数を考慮した上で、前記ずれ量が補償されるように前記熱分解ガス化溶融処理プラントに係る操作量を最適化する第4の手段、
としてコンピュータを機能させ、
前記操作量の少なくとも1つ以上が流動床の温度に影響を与える操作量であり、前記制御量が少なくとも2つ以上であるとともにその内1つが流動床の温度であり、且つ、
前記流動床の温度が予め設定された下限値以下である場合に、未来の有限区間において前記流動床の温度が下限値以上となるように前記制約条件を設定するとともに、前記流動床の温度に関する項を除いて前記評価関数を設定することを特徴とするプログラム。
【請求項6】
前記下限値は、前記廃棄物の性状に応じて設定することを特徴とする請求項5に記載のプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2006−46831(P2006−46831A)
【公開日】平成18年2月16日(2006.2.16)
【国際特許分類】
【出願番号】特願2004−230061(P2004−230061)
【出願日】平成16年8月6日(2004.8.6)
【出願人】(000001199)株式会社神戸製鋼所 (5,860)
【Fターム(参考)】
【公開日】平成18年2月16日(2006.2.16)
【国際特許分類】
【出願日】平成16年8月6日(2004.8.6)
【出願人】(000001199)株式会社神戸製鋼所 (5,860)
【Fターム(参考)】
[ Back to top ]