
熱移動シミュレーション方法及び熱移動シミュレーションシステム

【課題】容易かつ正確に、風による熱の移動をシミュレーションすること。
【解決手段】 地球上の一部地域を通信衛星から撮像したデジタル画像データを入力し、前記一部地域の表面温度分布データを入力し、前記デジタル画像データを用いて、前記一部地域に含まれる建物の三次元データを生成し、前記建物の位置における風量及び風向を指定し、入力した表面温度分布データを境界条件として、前記三次元データの周囲における、前記指定工程で指定した風量及び風向による熱の移動をシミュレートし、表示する。
【解決手段】 地球上の一部地域を通信衛星から撮像したデジタル画像データを入力し、前記一部地域の表面温度分布データを入力し、前記デジタル画像データを用いて、前記一部地域に含まれる建物の三次元データを生成し、前記建物の位置における風量及び風向を指定し、入力した表面温度分布データを境界条件として、前記三次元データの周囲における、前記指定工程で指定した風量及び風向による熱の移動をシミュレートし、表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、熱の移動をシミュレーションする技術に関する。
【背景技術】
【0002】
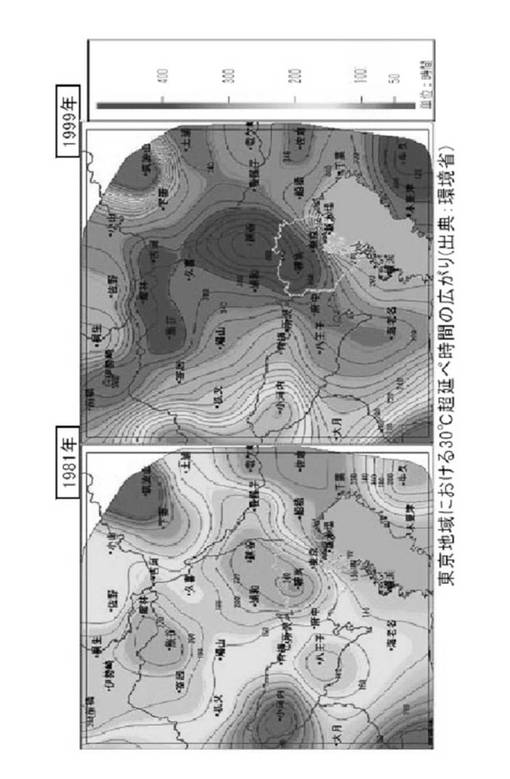
近年では、地球温暖化を原因とするヒートアイランド現象がますます問題となってきている。このことは、東京近郊の高温域分布の推移(図7、環境省提供)を見れば一目瞭然である。気温が30度を越えた延べ時間が400時間近い範囲は、1981年(左側)に比べ、1999年(右側)では圧倒的に大きくなっている。また、例えば、1930年と比較すると、東京では、自然的被覆(河川や樹木・草木)は、43.6%減少し、舗装面積は11倍に増加、建築面積は3.2倍に増加し、その結果、平均気温は約2℃上昇している。
【0003】
このような状況下で少しでも快適に暮らすため、様々な提案が講じられているが、特に、公園や河川などの周囲に溜まったの冷気を風に乗せて居住地域に流すことがエネルギー効率上有効だと考えられている。最小のエネルギーで最大の心地よさを得るため、つまり、クーラーに頼らず夏涼しく暮らすために、自然に発生した冷気が風に乗って居住地域に流れるような街づくり、特に環境共生型団地の実現が重要視されている。
【0004】
【特許文献1】特開2007−104972号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の対策では、実際の建物の大きさや形状、配置、樹木の量と配置、風量と風向といった要素と、その建物内部及びその周辺における熱移動について明確な分析が行なわれていなかった。
【0006】
本発明は、風の影響や、周辺環境の影響を踏まえた上での、熱移動を解析することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明に係る方法は、
地球上の一部地域を通信衛星から撮像したデジタル画像データを入力する第1入力工程と、
前記一部地域の表面温度分布データを入力する第2入力工程と、
前記デジタル画像データを用いて、前記一部地域に含まれる建物の三次元データを生成する生成工程と、
前記建物の位置における風量及び風向を指定する指定工程と、
前記第2入力工程で入力した表面温度分布データを境界条件として、前記三次元データの周囲における、前記指定工程で指定した風量及び風向による熱の移動をシミュレートし、表示する表示工程と、
を含むことを特徴とする。
【0008】
上記目的を達成するため、本発明に係るシステムは、
地球上の一部地域を通信衛星から撮像したデジタル画像データを入力する第1入力手段と、
前記一部地域の表面温度分布データを入力する第2入力手段と、
前記デジタル画像データを用いて、前記一部地域に含まれる建物の三次元データを生成する生成手段と、
前記建物の位置における風量及び風向を指定する指定手段と、
前記第2入力手段で入力した表面温度分布データを境界条件として、前記三次元データの周囲における、前記指定手段で指定した風量及び風向による熱の移動をシミュレートし、三次元表示する表示手段と、
を含むことを特徴とする。
【発明の効果】
【0009】
本発明によれば、容易かつ正確に、風による熱の移動をシミュレーションすることができる。
【発明を実施するための最良の形態】
【0010】
以下に、図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。ただし、この実施の形態に記載されている構成要素の相対配置、表示画面等は、特に特定的な記載がない限りは、この発明の範囲をそれらのみに限定する趣旨のものではない。
【0011】
<システム構成>
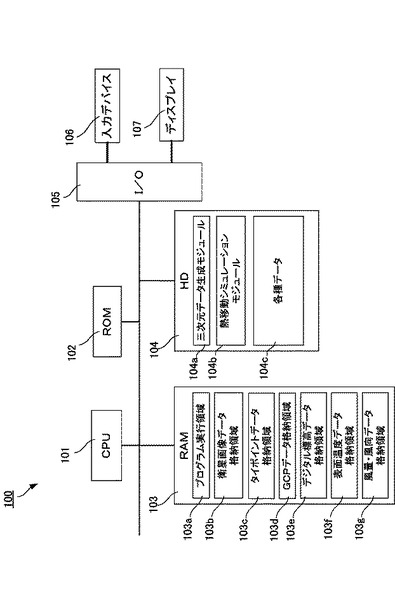
本発明に係る方法を実現するシステムについて説明する。図1は、熱移動シミュレーションシステムの概略構成を示す図である。熱移動シミュレーションシステム100は、汎用コンピュータにOS(基本ソフトウェア)及びいくつかのアプリケーションプログラムをインストールすることにより構成されるシステムである。
【0012】
本システム100は、図1に示すとおり、CPU(中央処理装置)101、ROM(リードオンリメモリ)102、RAM(ランダムアクセスメモリ)103、HD(ハードディスク)104、及びI/O(入出力インタフェース)105を備えたコンピュータ本体にマウスやキーボードといった入力デバイス106、及びディスプレイ107が接続された構成となっている。
【0013】
CPU101は、本システム110の全体を制御する演算・制御用のプロセッサである。ROM102は、CPU101で実行するプログラムや固定値等を格納する不揮発性メモリである。RAM103は、データやプログラムを一時的に記憶するための揮発性メモリであり、HD(ハードディスク)104は、本システム100で実行するOS及び各種のアプリケーションプログラムを格納した記憶媒体である。入出力インタフェース(I/O)105は、コンピュータ本体とその周辺装置との間で画像データを入出力するためのインタフェースであり、CPU101はこのI/Oを介して、入力デバイス106や、ディスプレイ107との間でのデータのやり取りを行う。
【0014】
本システム100において、RAM103は熱移動シミュレーション処理に際し、CPU101で実行するシミュレーションプログラムを一時的に格納するプログラム実行領域103aの他、衛生画像データ格納領域103b、タイポイントデータ格納領域103c、GCP(グラウンドコントロールポイント)データ格納領域103d、デジタル標高データ格納領域103e及び表面温度データ格納領域103f、風向・風量データ格納領域103gなどを備える。
【0015】
ここで、タイポイントデータとは、複数の衛星画像データの対応点を示すデータである。GCPデータとは、絶対座標(緯度、経度、標高)が既知であって、画像データにおいてもその画像位置を特定できる目標物(地上基準点)のデータであり、絶対座標データ及び衛星画像内の位置データが含まれる。また、デジタル標高データとは、洪水ハザードマップを作成する際に必要となる、メッシュ毎のデジタル標高データである。
【0016】
また、本システム100において、HD104には、三次元データ生成モジュール104a、及び熱移動シミュレーションモジュール104bの他、RAM103に展開する各種データ(衛星画像データなど)が記憶されている。
【0017】
<熱移動シミュレーションの流れ>
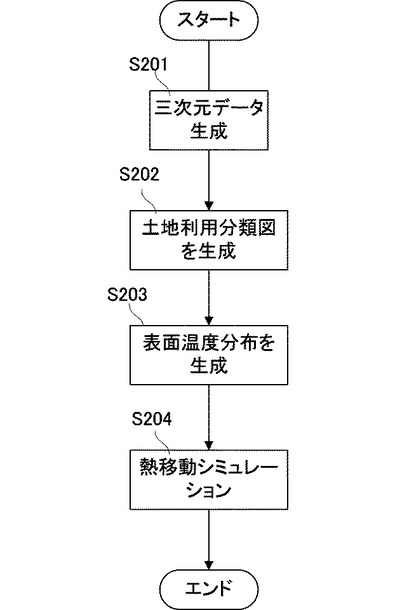
次に、本システムによって実現する熱移動シミュレーションの流れについて図2を用いて説明する。
【0018】
まず、ステップS201において、衛星画像(ステレオペア画像)からDEM(Digital Elevation Model)とDSM(digitalStructure Model)を算出し、建物や植物などの3Dポリゴンを生成する。
【0019】
次に、ステップS202において、NDVI(Normalized Difference Vegetation Index,正規化植生指標)を利用して、土地利用分類図を生成する。NDVIは、世界中で最も広く用いられている植生指標であり、以下の式を用いて導くことができる。
【0020】
NDVI=(NIR‐RED)/(NIR+RED)
ここで、NIRは近赤外域、REDは可視域の赤の反射率である。植物は、赤の反射率が低く、近赤外域の反射率は高くなる。植物量が多い時や健全な植物では、この近赤外域と赤の反射率の差が大きくなる。NDVI(0から255までの整数値)は、これを利用した正規化指標である。つまり、NDVIの判定により、人工構造物なのか、或いは植生分布なのか、正確に判断できる。
【0021】
具体的には、CPU101がNDVIの値を求め、季節や場所に応じて予め定められた閾値と比較して、例えば4乃至6つの分類にわけ、土地利用分類図(いわゆる教師付き土地利用判読分類データ)を作成する。
【0022】
更にステップS203において、衛星画像データから表面温度分布を生成する。このとき、熱移動シミュレーション計算の境界条件に対応させるため、詳細メッシュ(例えば3m×3m)のものを求める。このとき、土地利用分類で人工構造物と判定されているのに、何らかの一時的な原因で低温となって、樹木などのクールスポットとして分類された部分を、クールスポットではない通常の建造物として分類し直す。このようなクールスポットと誤判定された建物を含む領域(特別な理由で温度分布が回りより低い)に対して、その領域を取り巻く周辺の平均温度分布を与えて修正したうえで、全域のシミュレーションを同時に行う。
【0023】
別な表現をすれば、クールスポットの条件は、周りより十分表面温度が低い分布であって、NDVI判定の土地利用分類では樹木である、という2つの条件を満たす必要がある。
【0024】
次に、ステップS204においては、気象データから、風向き及び風速を算出する。ステップS205において、ステップS201で生成した3Dポリゴンの表面における、ステップS203の表面温度を境界条件として、その表面の熱がステップS204で得た風によってどのように移動するかをシミュレーションし、結果を画像表示する。図3(a)は、斜め上方から見た建物(団地)周りの熱の分布表示の例を示しており、砂のように示されている黒い点は、風の流れを表わすトレーサーである。この図では画面の右から左に3.2mの南風が吹いたときの表面温度分布の移動を示している。実際には、静止画ではなく動画で表示することにより、より明確に熱の移動を把握することができる。図3(b)は、横方向から見た建物周りの熱の分布を示して表示表示の例を示している。図3(b)を見れば、川や緑地にある冷気(青い部分)が、風の向きや風速に応じて、建物の上を流れて、団地付近に降りる様子が分かる。
【0025】
流体の運動方程式には、非定常非圧縮Navier-Stokes方程式を用いる。これに質量保存則、圧力のポアソン方程式を組み合わせ、支配方程式とする。これらの方程式の離散化には、多方向差分法を採用する。非線形項には3次精度風上差分を、非線形項以外の空間微分項には2次精度中心差分を用いる。
【0026】
Navier-Stokes方程式の時間積分には,Crank-Nicolson2次精度陰解法を用いる。これらの方程式は,各時間ステップでSOR法,Multi-grid法を用いて解く。圧力はポアソン方程式を解くことにより求め、Multi-grid法の採用により高速・高精度化を実現している。
支配方程式は,連続の式,3次元非圧縮性Navier-Stokes方程式を用いている。
【数1】

【数2】
【数3】
【数4】
【数5】
【0027】
以下に記号について説明する(単位系は統一する必要がある)。
u 速度ベクトル
T 温度[K]
T0 基準温度[K]
t 時間
p(上にバー) 圧力、但し、次の関係がある。
【数6】
p0 ある基準圧力
ρ0 p0に対応するある基準密度
p’ p0からの圧力の変動分
ν 流体の動粘性率
β 体膨張率
ΔT 温度差[K]
K 外力ベクトル
g 重力加速度
α 温度伝播率(熱拡散率)
Q 単位体積当たりの発熱量
ρ 密度
Cp 定圧比熱
k 熱伝導率
【0028】
尚、NagareはNavier-Stokes方程式を物理的に正しく解くことを主眼として開発されており、計算時に設定するパラメータは物理的なもののみである。計算格子には直交等間隔格子を採用している。直交等間隔格子を用いることにより、流れ場の設定が非常に容易になり、また、計算領域全体で格子点の分布が一様であるため、格子による局所的な数値的な拡散の影響が少ない。
【0029】
可視化には流体可視化ソフトウェアClef3Dを用いる。Nagareにて解析した各格子点にて算出された時間毎に変化する物理量(X,Y,Z方向の速度,圧力,密度,温度,渦度)を可視化する。解析結果の可視化は現象を観察する上で非常に有効な手段である。
【0030】
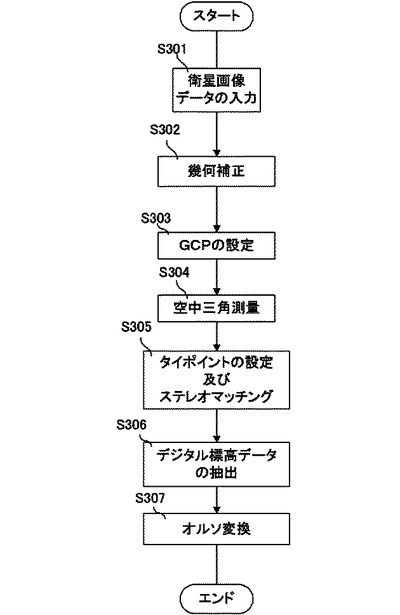
<デジタル標高データの抽出処理>
次に、図4のフローチャートを用いて、ステップS201でのデジタル標高データの抽出処理について説明する。まず、ステップS301において、衛星画像データを入力する。ステップS301で入力される衛星画像データは、例えばQuickBird衛星によってリモートセンシングされた画像データであり、放射補正、およびセンサ補正がなされたものである。ここで、放射補正とは、センサ素子間の相対放射反応、非反応検知センサ素子の補填、および絶対放射測定に対する補正である。またセンサ補正とは、センサ内部構造、光学ひずみ、走査ひずみなどを考慮した補正である。
【0031】
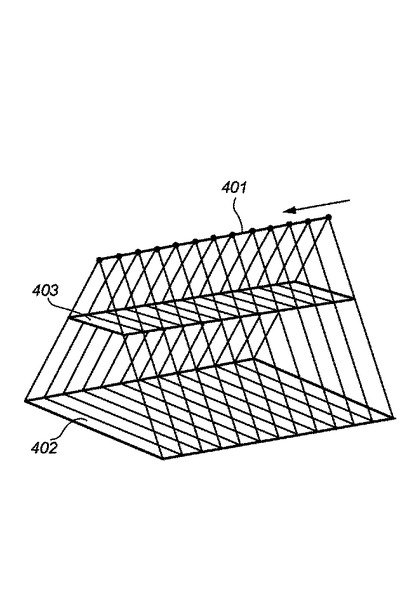
衛星によるリモートセンシングの様子を図5に示す。QuickBird衛星などの撮像衛星は、衛星軌道401上を矢印方向に秒速約8kmの速度で移動しながら、ラインセンサにより地表面402をリモートセンシングする。衛星に搭載されたラインセンサは、地表面402から受信した電磁波をイメージプレーン403に投影してデジタルデータとして保存する。そしてこのデジタルデータに対し、放射補正及びセンサ補正を行ったものがステップS301で入力される。QuickBird衛星の場合、リモートセンシングされた画像データの空間分解能は約61cm(直下点) から72cm(25度オフナディア角)であり、一度に約16.5km四方の地表面の画像を取込むことができる。
【0032】
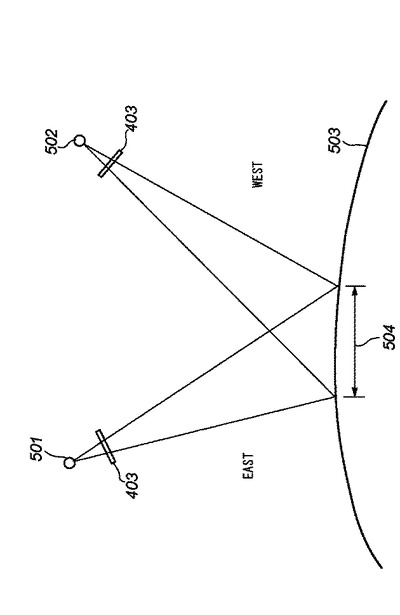
ステップS301では、このようにリモートセンシングされた画像データが、少なくとも2種類用意される。それらは、異なる位置にある衛星のセンサ、又は、一つの衛星に設けられた異なるセンサから同じ地域をリモートセンシングすることにより得られた画像データである。その関係を図6に示す。501及び502が衛星の軌道であり、503が地表面である。504が撮像対象領域である。QuickBird衛星を用いる場合には、1つの衛星で異なる軌道上から同じ地域を撮像することが可能であるが、それぞれ異なる衛星から同じ地域を撮像してもよい。なお、QuickBird衛星は南北に周回する衛星であるから、その軌道は東西にずれたものとなる。また、QuickBird衛星などの商用衛星では、衛星が1つの軌道を北から南に移動する間にセンサの向きを変更し同一の領域をほぼ同時に2方向から撮像しステレオペア画像を取得する機能がある。この機能を利用した場合には、図6の501及び502は、同一の軌道上の異なる時間の衛星位置を示すことになる。
【0033】
なお、ステップS301では、画像データのみならず、画像サポートデータ(ISD)をも入力する。画像サポートデータには、少なくともその画像を撮像した衛星の位置及び時刻の情報が含まれている。画像サポートデータとしては、例えば、姿勢データ(最初のデータ点の時刻、点数、点間隔と姿勢情報)、衛星軌道暦データ(最初のデータ点の時刻、点数、点間隔と衛星軌道情報)、幾何補正データ(衛星のセンサおよび光学系をモデル化した仮想カメラモデルの写真測量用のパラメータ:焦点距離、中心軸座標など)、画像メタデータ(製品のレベル、画像4隅の座標値(緯度、経度)、地図投影法の情報を含む画像製品などの主要な属性と、画像取得時刻)、RPC(RAPID POSITIONING CAPABILITY EXTENSION FORMAT)データ(空間の4隅の座標値と画像の4隅の座標値とを数学的に対応させるデータ)が挙げられる。
【0034】
ステップS301で入力する衛星画像データは、センサ補正がなされているので、衛星・センサの機構が起因する歪みは補正されているが、センサの移動や地球の自転による歪みが含まれている。そこで、ステップS302において、そのような歪みを補正する。この補正を狭義の幾何補正と称する。ステップS302では、更に、衛星センサの焦点距離や視野角などの幾何学特性パラメータを用いて、ピクセル座標から衛星座標への変換係数を幾何学的に決定する。
【0035】
次に、ステップS303において、GCPの設定を行い、ステップS304において、空中三角測量を行う。GCPには、三角点、水準点、もしくは、測量により得られた地点の座標、標高などが用いられる。日本国内の場合、25000分1の地形図が容易に入手できるので、交差点などの緯度経度、およびおよその標高を読み取りその値をGCPとして用いることができる。
【0036】
空中三角測量とは、衛星のラインアレイセンサで撮像された平面画像上の座標と地上座標系との関係を、センサ中心と、画像上のGCPの座標と、地上におけるGCPの位置が一直線上にあるという、共線条件を用いて解析する測量をいう。
【0037】
ステップS301で入力した衛星画像データにおいて、対象物の画像の座標(x,y)が分かれば、経度Xと緯度Yと標高Zの関係を示す一次関係式が2つ求まることになる。
【0038】
次に、ステップS305において、タイポイントの設定及びステレオマッチングを行う。タイポイントとは、複数の衛星画像データにおいて同一の地上の対象物(交差点、特徴的な建造物など)を表した対応点である。ステレオマッチングとは、2つの衛星画像データにおいて、タイポイントの座標比較を行う処理である。
【0039】
タイポイントは、2枚の画像を見比べることによりオペレータが設定してもよいが、基本的には画像処理プログラムにより自動的に求められる。2枚の画像データからそれぞれ小さな窓領域(例えば7×7ピクセル程度)を抽出し、最も類似度の高い領域同士を探しだし、タイポイントとして定義することが可能である。このようにタイポイントを設定することにより、2つの画像データを対応付けることができる。
【0040】
ステレオマッチングにより2つの画像データにおける同じタイポイントの座標が導き出されると、その位置のずれから標高を算出することができる。2つの衛星画像により、同一地域について、取得したステレオ画像間では、対応する地表物の位置は、基準標高からの差の分だけ位置ずれ(視差)を生じている。この位置ずれを計測することにより、逆に基準標高からの差、すなわち標高を求めることができる。
【0041】
ステップS305において、検索された全てのタイポイントについて、緯度、経度及び標高を求めると、ステップS306に進む。
【0042】
ステップS306では、最小二乗法などの逐次近似法を用いて、複数のタイポイント及びGCPの座標から、画像データ上の全ピクセルのデジタル標高データを求める。このとき、平均二乗誤差も求められるので、求められた標高値の精度評価を同時に行うことができる。
【0043】
次に、ステップS307において、ステップS306で抽出した正確なデジタル標高データを用いて、衛星画像データに対しオルソ幾何変換を施す。オルソ幾何変換とは、中心投影画像を平行投影画像に変換する処理である。このオルソ幾何変換を施されたデータが、熱移動シミュレーションのための市街地の三次元データとなる。
【0044】
なお、ここでは、QuickBird衛星からのリモートセンシングについて説明したが、本発明はこれに限定されるものではない。すなわち、軌道データなどが公表されておりその画像データからデジタル標高データを抽出可能なあらゆる衛星を用いることができる。
【0045】
以上説明したように、衛星画像データからデジタル標高データを抽出すれば、容易且つ正確に所望の地域の三次元データ(建物だけでなく木や)を得ることができ、更に、その三次元データを用いることで、正確に、熱の分布及び移動をシミュレーションすることができる。
【0046】
その結果、その熱移動シミュレーション結果に基づいて、ホットスポット対策として、駐車場を建物内に配して屋外のアスファルト面を縮小したり、既存樹木を活用したり、屋上緑化を実施したりすることができる。
【図面の簡単な説明】
【0047】
【図1】本発明の実施形態に係るシミュレーションシステムの概略構成を示す図である。
【図2】本発明の実施形態に係るシミュレーション処理を示すフローチャートである。
【図3】本発明の実施形態に係るシミュレーション処理の結果を示す図である。
【図4】本発明の実施形態に係るデジタル標高データ抽出処理を示すフローチャートである。
【図5】衛星によるリモートセンシングについて説明する図である。
【図6】異なる位置にあるセンサからの複数画像の撮像について説明する図である。
【図7】本発明の背景について説明するための図である。
【技術分野】
【0001】
本発明は、熱の移動をシミュレーションする技術に関する。
【背景技術】
【0002】
近年では、地球温暖化を原因とするヒートアイランド現象がますます問題となってきている。このことは、東京近郊の高温域分布の推移(図7、環境省提供)を見れば一目瞭然である。気温が30度を越えた延べ時間が400時間近い範囲は、1981年(左側)に比べ、1999年(右側)では圧倒的に大きくなっている。また、例えば、1930年と比較すると、東京では、自然的被覆(河川や樹木・草木)は、43.6%減少し、舗装面積は11倍に増加、建築面積は3.2倍に増加し、その結果、平均気温は約2℃上昇している。
【0003】
このような状況下で少しでも快適に暮らすため、様々な提案が講じられているが、特に、公園や河川などの周囲に溜まったの冷気を風に乗せて居住地域に流すことがエネルギー効率上有効だと考えられている。最小のエネルギーで最大の心地よさを得るため、つまり、クーラーに頼らず夏涼しく暮らすために、自然に発生した冷気が風に乗って居住地域に流れるような街づくり、特に環境共生型団地の実現が重要視されている。
【0004】
【特許文献1】特開2007−104972号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の対策では、実際の建物の大きさや形状、配置、樹木の量と配置、風量と風向といった要素と、その建物内部及びその周辺における熱移動について明確な分析が行なわれていなかった。
【0006】
本発明は、風の影響や、周辺環境の影響を踏まえた上での、熱移動を解析することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明に係る方法は、
地球上の一部地域を通信衛星から撮像したデジタル画像データを入力する第1入力工程と、
前記一部地域の表面温度分布データを入力する第2入力工程と、
前記デジタル画像データを用いて、前記一部地域に含まれる建物の三次元データを生成する生成工程と、
前記建物の位置における風量及び風向を指定する指定工程と、
前記第2入力工程で入力した表面温度分布データを境界条件として、前記三次元データの周囲における、前記指定工程で指定した風量及び風向による熱の移動をシミュレートし、表示する表示工程と、
を含むことを特徴とする。
【0008】
上記目的を達成するため、本発明に係るシステムは、
地球上の一部地域を通信衛星から撮像したデジタル画像データを入力する第1入力手段と、
前記一部地域の表面温度分布データを入力する第2入力手段と、
前記デジタル画像データを用いて、前記一部地域に含まれる建物の三次元データを生成する生成手段と、
前記建物の位置における風量及び風向を指定する指定手段と、
前記第2入力手段で入力した表面温度分布データを境界条件として、前記三次元データの周囲における、前記指定手段で指定した風量及び風向による熱の移動をシミュレートし、三次元表示する表示手段と、
を含むことを特徴とする。
【発明の効果】
【0009】
本発明によれば、容易かつ正確に、風による熱の移動をシミュレーションすることができる。
【発明を実施するための最良の形態】
【0010】
以下に、図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。ただし、この実施の形態に記載されている構成要素の相対配置、表示画面等は、特に特定的な記載がない限りは、この発明の範囲をそれらのみに限定する趣旨のものではない。
【0011】
<システム構成>
本発明に係る方法を実現するシステムについて説明する。図1は、熱移動シミュレーションシステムの概略構成を示す図である。熱移動シミュレーションシステム100は、汎用コンピュータにOS(基本ソフトウェア)及びいくつかのアプリケーションプログラムをインストールすることにより構成されるシステムである。
【0012】
本システム100は、図1に示すとおり、CPU(中央処理装置)101、ROM(リードオンリメモリ)102、RAM(ランダムアクセスメモリ)103、HD(ハードディスク)104、及びI/O(入出力インタフェース)105を備えたコンピュータ本体にマウスやキーボードといった入力デバイス106、及びディスプレイ107が接続された構成となっている。
【0013】
CPU101は、本システム110の全体を制御する演算・制御用のプロセッサである。ROM102は、CPU101で実行するプログラムや固定値等を格納する不揮発性メモリである。RAM103は、データやプログラムを一時的に記憶するための揮発性メモリであり、HD(ハードディスク)104は、本システム100で実行するOS及び各種のアプリケーションプログラムを格納した記憶媒体である。入出力インタフェース(I/O)105は、コンピュータ本体とその周辺装置との間で画像データを入出力するためのインタフェースであり、CPU101はこのI/Oを介して、入力デバイス106や、ディスプレイ107との間でのデータのやり取りを行う。
【0014】
本システム100において、RAM103は熱移動シミュレーション処理に際し、CPU101で実行するシミュレーションプログラムを一時的に格納するプログラム実行領域103aの他、衛生画像データ格納領域103b、タイポイントデータ格納領域103c、GCP(グラウンドコントロールポイント)データ格納領域103d、デジタル標高データ格納領域103e及び表面温度データ格納領域103f、風向・風量データ格納領域103gなどを備える。
【0015】
ここで、タイポイントデータとは、複数の衛星画像データの対応点を示すデータである。GCPデータとは、絶対座標(緯度、経度、標高)が既知であって、画像データにおいてもその画像位置を特定できる目標物(地上基準点)のデータであり、絶対座標データ及び衛星画像内の位置データが含まれる。また、デジタル標高データとは、洪水ハザードマップを作成する際に必要となる、メッシュ毎のデジタル標高データである。
【0016】
また、本システム100において、HD104には、三次元データ生成モジュール104a、及び熱移動シミュレーションモジュール104bの他、RAM103に展開する各種データ(衛星画像データなど)が記憶されている。
【0017】
<熱移動シミュレーションの流れ>
次に、本システムによって実現する熱移動シミュレーションの流れについて図2を用いて説明する。
【0018】
まず、ステップS201において、衛星画像(ステレオペア画像)からDEM(Digital Elevation Model)とDSM(digitalStructure Model)を算出し、建物や植物などの3Dポリゴンを生成する。
【0019】
次に、ステップS202において、NDVI(Normalized Difference Vegetation Index,正規化植生指標)を利用して、土地利用分類図を生成する。NDVIは、世界中で最も広く用いられている植生指標であり、以下の式を用いて導くことができる。
【0020】
NDVI=(NIR‐RED)/(NIR+RED)
ここで、NIRは近赤外域、REDは可視域の赤の反射率である。植物は、赤の反射率が低く、近赤外域の反射率は高くなる。植物量が多い時や健全な植物では、この近赤外域と赤の反射率の差が大きくなる。NDVI(0から255までの整数値)は、これを利用した正規化指標である。つまり、NDVIの判定により、人工構造物なのか、或いは植生分布なのか、正確に判断できる。
【0021】
具体的には、CPU101がNDVIの値を求め、季節や場所に応じて予め定められた閾値と比較して、例えば4乃至6つの分類にわけ、土地利用分類図(いわゆる教師付き土地利用判読分類データ)を作成する。
【0022】
更にステップS203において、衛星画像データから表面温度分布を生成する。このとき、熱移動シミュレーション計算の境界条件に対応させるため、詳細メッシュ(例えば3m×3m)のものを求める。このとき、土地利用分類で人工構造物と判定されているのに、何らかの一時的な原因で低温となって、樹木などのクールスポットとして分類された部分を、クールスポットではない通常の建造物として分類し直す。このようなクールスポットと誤判定された建物を含む領域(特別な理由で温度分布が回りより低い)に対して、その領域を取り巻く周辺の平均温度分布を与えて修正したうえで、全域のシミュレーションを同時に行う。
【0023】
別な表現をすれば、クールスポットの条件は、周りより十分表面温度が低い分布であって、NDVI判定の土地利用分類では樹木である、という2つの条件を満たす必要がある。
【0024】
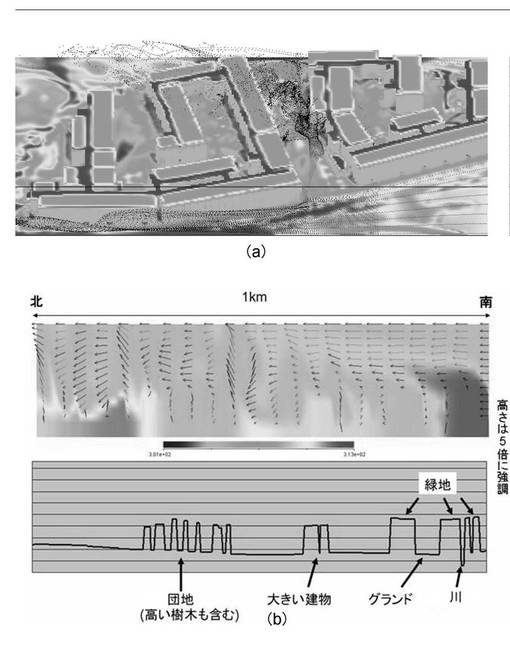
次に、ステップS204においては、気象データから、風向き及び風速を算出する。ステップS205において、ステップS201で生成した3Dポリゴンの表面における、ステップS203の表面温度を境界条件として、その表面の熱がステップS204で得た風によってどのように移動するかをシミュレーションし、結果を画像表示する。図3(a)は、斜め上方から見た建物(団地)周りの熱の分布表示の例を示しており、砂のように示されている黒い点は、風の流れを表わすトレーサーである。この図では画面の右から左に3.2mの南風が吹いたときの表面温度分布の移動を示している。実際には、静止画ではなく動画で表示することにより、より明確に熱の移動を把握することができる。図3(b)は、横方向から見た建物周りの熱の分布を示して表示表示の例を示している。図3(b)を見れば、川や緑地にある冷気(青い部分)が、風の向きや風速に応じて、建物の上を流れて、団地付近に降りる様子が分かる。
【0025】
流体の運動方程式には、非定常非圧縮Navier-Stokes方程式を用いる。これに質量保存則、圧力のポアソン方程式を組み合わせ、支配方程式とする。これらの方程式の離散化には、多方向差分法を採用する。非線形項には3次精度風上差分を、非線形項以外の空間微分項には2次精度中心差分を用いる。
【0026】
Navier-Stokes方程式の時間積分には,Crank-Nicolson2次精度陰解法を用いる。これらの方程式は,各時間ステップでSOR法,Multi-grid法を用いて解く。圧力はポアソン方程式を解くことにより求め、Multi-grid法の採用により高速・高精度化を実現している。
支配方程式は,連続の式,3次元非圧縮性Navier-Stokes方程式を用いている。
【数1】
【数2】
【数3】
【数4】
【数5】
【0027】
以下に記号について説明する(単位系は統一する必要がある)。
u 速度ベクトル
T 温度[K]
T0 基準温度[K]
t 時間
p(上にバー) 圧力、但し、次の関係がある。
【数6】
p0 ある基準圧力
ρ0 p0に対応するある基準密度
p’ p0からの圧力の変動分
ν 流体の動粘性率
β 体膨張率
ΔT 温度差[K]
K 外力ベクトル
g 重力加速度
α 温度伝播率(熱拡散率)
Q 単位体積当たりの発熱量
ρ 密度
Cp 定圧比熱
k 熱伝導率
【0028】
尚、NagareはNavier-Stokes方程式を物理的に正しく解くことを主眼として開発されており、計算時に設定するパラメータは物理的なもののみである。計算格子には直交等間隔格子を採用している。直交等間隔格子を用いることにより、流れ場の設定が非常に容易になり、また、計算領域全体で格子点の分布が一様であるため、格子による局所的な数値的な拡散の影響が少ない。
【0029】
可視化には流体可視化ソフトウェアClef3Dを用いる。Nagareにて解析した各格子点にて算出された時間毎に変化する物理量(X,Y,Z方向の速度,圧力,密度,温度,渦度)を可視化する。解析結果の可視化は現象を観察する上で非常に有効な手段である。
【0030】
<デジタル標高データの抽出処理>
次に、図4のフローチャートを用いて、ステップS201でのデジタル標高データの抽出処理について説明する。まず、ステップS301において、衛星画像データを入力する。ステップS301で入力される衛星画像データは、例えばQuickBird衛星によってリモートセンシングされた画像データであり、放射補正、およびセンサ補正がなされたものである。ここで、放射補正とは、センサ素子間の相対放射反応、非反応検知センサ素子の補填、および絶対放射測定に対する補正である。またセンサ補正とは、センサ内部構造、光学ひずみ、走査ひずみなどを考慮した補正である。
【0031】
衛星によるリモートセンシングの様子を図5に示す。QuickBird衛星などの撮像衛星は、衛星軌道401上を矢印方向に秒速約8kmの速度で移動しながら、ラインセンサにより地表面402をリモートセンシングする。衛星に搭載されたラインセンサは、地表面402から受信した電磁波をイメージプレーン403に投影してデジタルデータとして保存する。そしてこのデジタルデータに対し、放射補正及びセンサ補正を行ったものがステップS301で入力される。QuickBird衛星の場合、リモートセンシングされた画像データの空間分解能は約61cm(直下点) から72cm(25度オフナディア角)であり、一度に約16.5km四方の地表面の画像を取込むことができる。
【0032】
ステップS301では、このようにリモートセンシングされた画像データが、少なくとも2種類用意される。それらは、異なる位置にある衛星のセンサ、又は、一つの衛星に設けられた異なるセンサから同じ地域をリモートセンシングすることにより得られた画像データである。その関係を図6に示す。501及び502が衛星の軌道であり、503が地表面である。504が撮像対象領域である。QuickBird衛星を用いる場合には、1つの衛星で異なる軌道上から同じ地域を撮像することが可能であるが、それぞれ異なる衛星から同じ地域を撮像してもよい。なお、QuickBird衛星は南北に周回する衛星であるから、その軌道は東西にずれたものとなる。また、QuickBird衛星などの商用衛星では、衛星が1つの軌道を北から南に移動する間にセンサの向きを変更し同一の領域をほぼ同時に2方向から撮像しステレオペア画像を取得する機能がある。この機能を利用した場合には、図6の501及び502は、同一の軌道上の異なる時間の衛星位置を示すことになる。
【0033】
なお、ステップS301では、画像データのみならず、画像サポートデータ(ISD)をも入力する。画像サポートデータには、少なくともその画像を撮像した衛星の位置及び時刻の情報が含まれている。画像サポートデータとしては、例えば、姿勢データ(最初のデータ点の時刻、点数、点間隔と姿勢情報)、衛星軌道暦データ(最初のデータ点の時刻、点数、点間隔と衛星軌道情報)、幾何補正データ(衛星のセンサおよび光学系をモデル化した仮想カメラモデルの写真測量用のパラメータ:焦点距離、中心軸座標など)、画像メタデータ(製品のレベル、画像4隅の座標値(緯度、経度)、地図投影法の情報を含む画像製品などの主要な属性と、画像取得時刻)、RPC(RAPID POSITIONING CAPABILITY EXTENSION FORMAT)データ(空間の4隅の座標値と画像の4隅の座標値とを数学的に対応させるデータ)が挙げられる。
【0034】
ステップS301で入力する衛星画像データは、センサ補正がなされているので、衛星・センサの機構が起因する歪みは補正されているが、センサの移動や地球の自転による歪みが含まれている。そこで、ステップS302において、そのような歪みを補正する。この補正を狭義の幾何補正と称する。ステップS302では、更に、衛星センサの焦点距離や視野角などの幾何学特性パラメータを用いて、ピクセル座標から衛星座標への変換係数を幾何学的に決定する。
【0035】
次に、ステップS303において、GCPの設定を行い、ステップS304において、空中三角測量を行う。GCPには、三角点、水準点、もしくは、測量により得られた地点の座標、標高などが用いられる。日本国内の場合、25000分1の地形図が容易に入手できるので、交差点などの緯度経度、およびおよその標高を読み取りその値をGCPとして用いることができる。
【0036】
空中三角測量とは、衛星のラインアレイセンサで撮像された平面画像上の座標と地上座標系との関係を、センサ中心と、画像上のGCPの座標と、地上におけるGCPの位置が一直線上にあるという、共線条件を用いて解析する測量をいう。
【0037】
ステップS301で入力した衛星画像データにおいて、対象物の画像の座標(x,y)が分かれば、経度Xと緯度Yと標高Zの関係を示す一次関係式が2つ求まることになる。
【0038】
次に、ステップS305において、タイポイントの設定及びステレオマッチングを行う。タイポイントとは、複数の衛星画像データにおいて同一の地上の対象物(交差点、特徴的な建造物など)を表した対応点である。ステレオマッチングとは、2つの衛星画像データにおいて、タイポイントの座標比較を行う処理である。
【0039】
タイポイントは、2枚の画像を見比べることによりオペレータが設定してもよいが、基本的には画像処理プログラムにより自動的に求められる。2枚の画像データからそれぞれ小さな窓領域(例えば7×7ピクセル程度)を抽出し、最も類似度の高い領域同士を探しだし、タイポイントとして定義することが可能である。このようにタイポイントを設定することにより、2つの画像データを対応付けることができる。
【0040】
ステレオマッチングにより2つの画像データにおける同じタイポイントの座標が導き出されると、その位置のずれから標高を算出することができる。2つの衛星画像により、同一地域について、取得したステレオ画像間では、対応する地表物の位置は、基準標高からの差の分だけ位置ずれ(視差)を生じている。この位置ずれを計測することにより、逆に基準標高からの差、すなわち標高を求めることができる。
【0041】
ステップS305において、検索された全てのタイポイントについて、緯度、経度及び標高を求めると、ステップS306に進む。
【0042】
ステップS306では、最小二乗法などの逐次近似法を用いて、複数のタイポイント及びGCPの座標から、画像データ上の全ピクセルのデジタル標高データを求める。このとき、平均二乗誤差も求められるので、求められた標高値の精度評価を同時に行うことができる。
【0043】
次に、ステップS307において、ステップS306で抽出した正確なデジタル標高データを用いて、衛星画像データに対しオルソ幾何変換を施す。オルソ幾何変換とは、中心投影画像を平行投影画像に変換する処理である。このオルソ幾何変換を施されたデータが、熱移動シミュレーションのための市街地の三次元データとなる。
【0044】
なお、ここでは、QuickBird衛星からのリモートセンシングについて説明したが、本発明はこれに限定されるものではない。すなわち、軌道データなどが公表されておりその画像データからデジタル標高データを抽出可能なあらゆる衛星を用いることができる。
【0045】
以上説明したように、衛星画像データからデジタル標高データを抽出すれば、容易且つ正確に所望の地域の三次元データ(建物だけでなく木や)を得ることができ、更に、その三次元データを用いることで、正確に、熱の分布及び移動をシミュレーションすることができる。
【0046】
その結果、その熱移動シミュレーション結果に基づいて、ホットスポット対策として、駐車場を建物内に配して屋外のアスファルト面を縮小したり、既存樹木を活用したり、屋上緑化を実施したりすることができる。
【図面の簡単な説明】
【0047】
【図1】本発明の実施形態に係るシミュレーションシステムの概略構成を示す図である。
【図2】本発明の実施形態に係るシミュレーション処理を示すフローチャートである。
【図3】本発明の実施形態に係るシミュレーション処理の結果を示す図である。
【図4】本発明の実施形態に係るデジタル標高データ抽出処理を示すフローチャートである。
【図5】衛星によるリモートセンシングについて説明する図である。
【図6】異なる位置にあるセンサからの複数画像の撮像について説明する図である。
【図7】本発明の背景について説明するための図である。
【特許請求の範囲】
【請求項1】
地球上の一部地域を通信衛星から撮像したデジタル画像データを入力する第1入力工程と、
前記一部地域の表面温度分布データを入力する第2入力工程と、
前記デジタル画像データを用いて、前記一部地域に含まれる建物の三次元データを生成する生成工程と、
前記建物の位置における風量及び風向を指定する指定工程と、
前記第2入力工程で入力した表面温度分布データを境界条件として、前記三次元データの周囲における、前記指定工程で指定した風量及び風向による熱の移動をシミュレートし、表示する表示工程と、
を含むことを特徴とする熱移動シミュレーション方法。
【請求項2】
前記表示工程は、仮想的に求めた前記熱の移動を三次元表示することを特徴とする請求項1に記載の熱移動シミュレーション方法。
【請求項3】
地球上の一部地域を通信衛星から撮像したデジタル画像データを入力する第1入力手段と、
前記一部地域の表面温度分布データを入力する第2入力手段と、
前記デジタル画像データを用いて、前記一部地域に含まれる建物の三次元データを生成する生成手段と、
前記建物の位置における風量及び風向を指定する指定手段と、
前記第2入力手段で入力した表面温度分布データを境界条件として、前記三次元データの周囲における、前記指定手段で指定した風量及び風向による熱の移動をシミュレートし、三次元表示する表示手段と、
を含むことを特徴とする熱移動シミュレーションシステム。
【請求項1】
地球上の一部地域を通信衛星から撮像したデジタル画像データを入力する第1入力工程と、
前記一部地域の表面温度分布データを入力する第2入力工程と、
前記デジタル画像データを用いて、前記一部地域に含まれる建物の三次元データを生成する生成工程と、
前記建物の位置における風量及び風向を指定する指定工程と、
前記第2入力工程で入力した表面温度分布データを境界条件として、前記三次元データの周囲における、前記指定工程で指定した風量及び風向による熱の移動をシミュレートし、表示する表示工程と、
を含むことを特徴とする熱移動シミュレーション方法。
【請求項2】
前記表示工程は、仮想的に求めた前記熱の移動を三次元表示することを特徴とする請求項1に記載の熱移動シミュレーション方法。
【請求項3】
地球上の一部地域を通信衛星から撮像したデジタル画像データを入力する第1入力手段と、
前記一部地域の表面温度分布データを入力する第2入力手段と、
前記デジタル画像データを用いて、前記一部地域に含まれる建物の三次元データを生成する生成手段と、
前記建物の位置における風量及び風向を指定する指定手段と、
前記第2入力手段で入力した表面温度分布データを境界条件として、前記三次元データの周囲における、前記指定手段で指定した風量及び風向による熱の移動をシミュレートし、三次元表示する表示手段と、
を含むことを特徴とする熱移動シミュレーションシステム。
【図1】

【図2】
【図4】
【図5】
【図6】
【図3】
【図7】
【図2】
【図4】
【図5】
【図6】
【図3】
【図7】
【公開番号】特開2009−75885(P2009−75885A)
【公開日】平成21年4月9日(2009.4.9)
【国際特許分類】
【出願番号】特願2007−244411(P2007−244411)
【出願日】平成19年9月20日(2007.9.20)
【出願人】(000003687)東京電力株式会社 (2,580)
【出願人】(503176550)株式会社アイエスエム (9)
【Fターム(参考)】
【公開日】平成21年4月9日(2009.4.9)
【国際特許分類】
【出願日】平成19年9月20日(2007.9.20)
【出願人】(000003687)東京電力株式会社 (2,580)
【出願人】(503176550)株式会社アイエスエム (9)
【Fターム(参考)】
[ Back to top ]