
燃料の給油システムおよび土木機械
【課題】ダンプトラック等の土木機械の生産性を低下させることなく、燃料を供給することができる燃料の給油システム等を提供する。
【解決手段】燃料を供給可能な給油設備と、給油設備へ向けて走行可能な運搬機械と、運搬機械への燃料の供給が実行可能であるか否かの情報である実行可否情報を取得し、取得した実行可否情報に基づく制御を実行可能な中央管理制御設備と、を備えた燃料の給油システムであって、中央管理制御設備は、運搬機械に燃料を供給するにあたり、実行可否情報に基づいて運搬機械への燃料の供給が実行不能であると判定すると、運搬機械による給油設備への進入を規制するための進入規制制御を実行する(ステップS6)。
【解決手段】燃料を供給可能な給油設備と、給油設備へ向けて走行可能な運搬機械と、運搬機械への燃料の供給が実行可能であるか否かの情報である実行可否情報を取得し、取得した実行可否情報に基づく制御を実行可能な中央管理制御設備と、を備えた燃料の給油システムであって、中央管理制御設備は、運搬機械に燃料を供給するにあたり、実行可否情報に基づいて運搬機械への燃料の供給が実行不能であると判定すると、運搬機械による給油設備への進入を規制するための進入規制制御を実行する(ステップS6)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、燃料を土木機械に供給する燃料の給油システムおよび土木機械に関するものである。
【背景技術】
【0002】
従来、燃料の給油システムとして、建設機械から送信される燃料の残量の情報を、基地局に報知する建設機械の燃料補給システムが知られている(例えば、特許文献1参照)。この建設機械の燃料補給システムでは、燃料の残量の情報を基地局に報知することで、基地局側で建設機械の燃料の残量を把握することができ、燃料補給の措置をとることができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】国際公開第01/073221号パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の建設機械の燃料補給システムは、建設機械の燃料の残量を把握して、建設機械を円滑に動作させるためのものであることから、建設機械にとって最適な燃料補給所を選定できるものの、建設機械を燃料補給所へ向けて走行させるという着想はない。このため、特許文献1の技術では、鉱山や採石を対象とする土木機械が給油設備へ向けて走行し、給油設備で燃料が供給できなかった場合の影響を回避することは困難である。具体的に、土木機械へ燃料を供給するにあたり、土木機械への燃料の供給が実行できない場合がある。例えば、土木機械の一種であるダンプトラックが荷物を搭載している場合や、燃料を供給する給油設備に燃料がない場合等である。この場合、土木機械が給油設備へ向かって走行したとしても、土木機械へ燃料を供給することができないため、給油設備で給油できなかったときの生産ロスが大きなものとなる。
【0005】
そこで、本発明は、土木機械の生産性を低下させることなく、燃料を供給することができる燃料の給油システムおよび土木機械を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明の燃料の給油システムは、燃料を供給可能な給油設備と、給油設備へ向けて走行可能な土木機械と、燃料の土木機械への供給が実行可能であるか否かの情報である実行可否情報を取得し、取得した実行可否情報に基づく制御を実行可能な制御装置と、を備えた燃料の給油システムであって、制御装置は、土木機械に燃料を供給するにあたり、実行可否情報に基づいて燃料の土木機械への供給が実行不能であると判定すると、土木機械による給油設備への進入を規制するための進入規制制御を実行することを特徴とする。
【0007】
この場合、制御装置は、土木機械を制御して、給油設備へ進入する土木機械の進入動作を規制する進入動作規制制御を、進入規制制御として実行することが好ましい。
【0008】
この場合、各種情報を報知可能な報知装置をさらに備え、制御装置は、報知装置を制御して、土木機械による給油設備への進入を規制する旨の警告情報を、土木機械へ向けて報知する進入規制報知制御を、進入規制制御として実行することが好ましい。
【0009】
この場合、給油設備への土木機械の進入を規制するゲート装置をさらに備え、制御装置は、ゲート装置を制御して、土木機械の給油設備への進入を規制するように動作させるゲート規制動作制御を、進入規制制御として実行することが好ましい。
【0010】
この場合、土木機械は、荷物を積載する積載部を有し、積載部に荷物が積載されているか否かを積載情報として検出可能な荷物検出装置をさらに備え、制御装置は、積載情報を実行可否情報として取得し、積載情報に基づいて積載部に荷物が積載されていると判定すると、燃料の土木機械への供給が実行不能であるとして、進入規制制御を実行することが好ましい。
【0011】
この場合、荷物検出装置は、積載部に積載された荷物の搭載量を検出する搭載量検出装置、土木機械に積載された荷物を撮像する撮像装置、および土木機械の重量を測定する重量測定装置のうち、少なくともいずれか1つを有していることが好ましい。
【0012】
この場合、制御装置は、積載情報から積載部に荷物が積載されていると判定すると、土木機械を荷下ろし場へ向けて配車し、積載情報から積載部に荷物が積載されていないと判定すると、土木機械を給油設備へ向けて配車することが好ましい。
【0013】
この場合、給油設備は、燃料を溜める設備側燃料タンクと、設備側燃料タンクに溜まった燃料の燃料量を設備側燃料量情報として検出可能な設備側燃料量検出手段と、を有し、制御装置は、設備側燃料量情報を実行可否情報として取得し、設備側燃料量情報に基づいて燃料が無いと判定すると、燃料の土木機械への供給が実行不能であるとして、進入規制制御を実行することが好ましい。
【0014】
この場合、給油設備は、土木機械へ燃料を供給する給油車の有無を給油車有無情報として検出可能な給油車有無検出手段を有し、制御装置は、給油車有無情報を実行可否情報として取得し、給油車有無情報に基づいて給油設備に給油車がいないと判定すると、燃料の土木機械への供給が実行不能であるとして、進入規制制御を実行することが好ましい。
【0015】
この場合、給油設備は、土木機械に燃料が供給されることによる給油設備の稼働状況を稼働情報として検出可能な稼働状況検出手段を有し、制御装置は、稼働情報を実行可否情報として取得し、稼働情報から給油設備が満車であると判定すると、燃料の土木機械への供給が実行不能であるとして、進入規制制御を実行することが好ましい。
【0016】
この場合、給油設備は、土木機械に燃料が供給されることによる給油設備の稼働状況を稼働情報として検出可能な稼働状況検出手段を有し、土木機械は、荷物を積載する積載部を有し、積載部に荷物が積載されているか否かを積載情報として検出可能な荷物検出装置をさらに備え、制御装置は、積載情報および稼働情報を実行可否情報として取得し、積載情報に基づいて積載部に荷物が積載されていると判定するか、または稼働情報から給油設備が満車であると判定すると、燃料の土木機械への供給が実行不能であるとして、進入規制制御を実行することが好ましい。
【0017】
本発明の土木機械は、燃料を供給する給油設備へ向けて走行可能な土木機械であって、燃料の供給が実行可能であるか否かの情報である実行可否情報を取得し、取得した実行可否情報に基づく制御を実行可能な制御部を備え、制御部は、燃料を供給するにあたり、実行可否情報に基づいて燃料の供給が実行不能であると判定すると、給油設備への進入を規制するための進入規制制御を実行することを特徴とする。
【0018】
この場合、制御部は、給油設備へ進入する進入動作を規制する進入動作規制制御を、進入規制制御として実行することが好ましい。
【0019】
この場合、情報を報知可能な報知部をさらに備え、制御部は、報知部を制御して、給油設備への進入を規制する旨の警告情報を、操作者へ向けて報知する進入規制報知制御を、進入規制制御として実行することが好ましい。
【0020】
この場合、荷物を積載する積載部と、積載部に荷物が積載されているか否かを積載情報として検出可能な荷物検出手段と、をさらに備え、制御部は、積載情報を実行可否情報として取得し、積載情報から積載部に荷物が積載されていると判定すると、燃料の供給が実行不能であるとして、進入規制制御を実行することが好ましい。
【0021】
この場合、制御部は、積載情報から積載部に荷物が積載されていると判定すると、荷下ろし場へ向けて配車し、積載情報から積載部に荷物が積載されていないと判定すると、給油設備へ向けて配車することが好ましい。
【発明の効果】
【0022】
本発明の燃料の給油システムおよび土木機械によれば、燃料の土木機械への供給が実行不能である場合、土木機械による給油設備への進入を規制することができるため、土木機械が給油設備へ向かって走行することによる生産性の低下を抑制することができる。
【図面の簡単な説明】
【0023】
【図1】図1は、実施例1の燃料の給油システムを適用した荷物運搬システムを模式的に表す概略構成図である。
【図2】図2は、実施例1の運搬機械が走行する走行路の説明図である。
【図3】図3は、実施例1の燃料の給油システムの構成を示すブロック図である。
【図4】図4は、実施例1の燃料の給油システムの制御動作に関するフローチャートである。
【図5】図5は、実施例2の運搬機械が走行する走行路の説明図である。
【図6】図6は、実施例2の燃料の給油システムの構成を示すブロック図である。
【図7】図7は、実施例3の運搬機械が走行する走行路の説明図である。
【図8】図8は、実施例3の燃料の給油システムの構成を示すブロック図である。
【図9】図9は、実施例5の燃料の給油システムの構成を示すブロック図である。
【図10】図10は、実施例6の燃料の給油システムの構成を示すブロック図である。
【図11】図11は、実施例7の燃料の給油システムの構成を示すブロック図である。
【図12】図12は、実施例8の燃料の給油システムの構成を示すブロック図である。
【発明を実施するための形態】
【0024】
以下、添付した図面を参照して、本発明に係る燃料の給油システムおよび土木機械について説明する。なお、以下の実施例によりこの発明が限定されるものではない。また、下記実施例における構成要素には、当業者が置換可能かつ容易なもの、或いは実質的に同一のものが含まれる。なお、実施例1から実施例8までは、土木機械を備えた燃料の給油システムについて説明し、実施例9および実施例10は、土木機械について説明する。
【実施例1】
【0025】
実施例1の燃料の給油システムは、荷物運搬システムに組み込まれている。この荷物運搬システムは、土木機械に搭載された荷物を運搬するシステムである。土木機械としては、建設機械や鉱山機械が適用され、実施例1では、鉱山機械であるダンプトラック等の運搬機械に適用して説明する。
【0026】
<荷物運搬システムの構成>
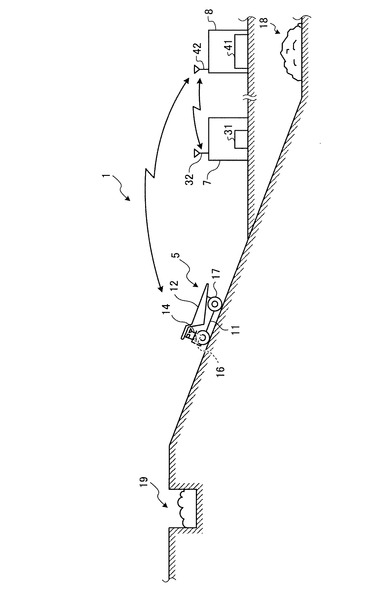
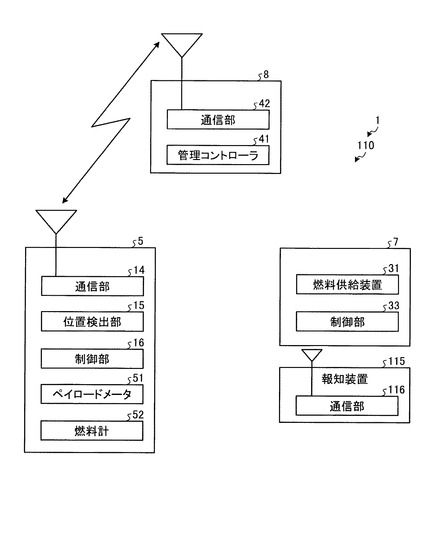
図1は、実施例1の燃料の給油システムを適用した荷物運搬システムを模式的に表す概略構成図である。図1に示すように、この荷物運搬システム1は、鉱山等で用いられており、運搬機械5と、給油設備7と、これらを管理制御する中央管理制御設備8とを備えている。
【0027】
運搬機械5は、例えば、ダンプトラックであり、荷物を積載して走行することが可能となっている。この運搬機械5は、車両本体11と、ベッセル12と、通信部14と、位置検出部15(図3参照)と、制御部16とを有している。制御部16は、例えば、マイクロコンピュータユニットであり、プロセッサと記憶装置とを含んでいる。
【0028】
車両本体11は、エンジンにおいて燃料を使用して動力を発生させると共に、モータにおいて電力を使用して動力を発生させる車両である。具体的に、車両本体11は、エンジンおよびモータを搭載し、エンジンおよびモータは接続されており、エンジンの動力により電力を発生させ、発生した電力がモータに供給される。これにより、車両本体11は、モータによる動力を駆動輪17に伝達することで走行可能となっている。ベッセル12は、荷物を積載するものであり、車両本体11の上部に配置されている。このベッセル12には、荷物として、採掘された鉱石又は岩若しくは土等の排土が積載される。なお、ベッセル12は、車両本体11に対し着脱可能な構成にしてもよい。
【0029】
通信部14は、制御部16に接続されており、運搬機械5の制御部16と中央管理制御設備8との間で無線通信を行っている。通信部14は、中央管理制御設備8から送信された情報を取得して、制御部16へ向けて出力すると共に、制御部16から出力された情報を取得して、中央制御設備8へ向けて送信している。位置検出部15は、例えば、GPS(Global Positioning System)が用いられており、運搬機械5の位置を認識している。位置検出部15は、制御部16に接続されており、検出した位置情報を制御部16へ出力している。そして、制御部16は、運搬機械5のエンジンなどの各部における動作を制御したり、通信部14を介して取得した位置情報等の情報を中央管理制御設備8へ向けて送信したりしている。
【0030】
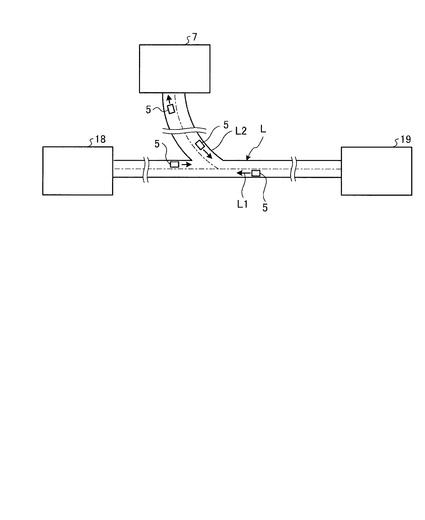
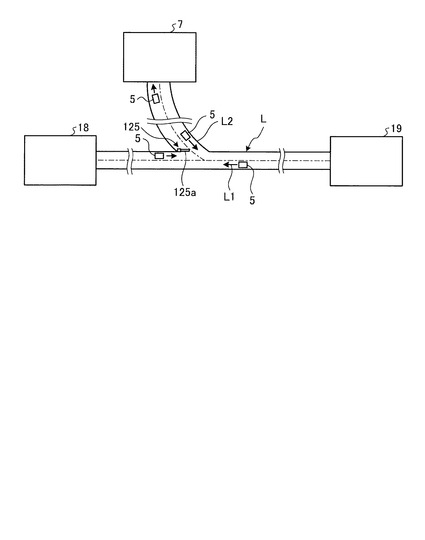
図2は、実施例1の運搬機械が走行する走行路の説明図である。上記のように構成された運搬機械5は、荷物を所定の走行路Lに沿って運搬する。図2に示すように、運搬機械5が走行する走行路Lは、例えば、運搬機械5の進路が、走行路Lの幅方向左側となるように構成され、走行路L1と走行路L2とを有している。走行路L1は、荷物を積載する積荷場18と、荷物を下ろす排土場(荷下ろし場)19とを結ぶ走行路であり、積荷場18から排土場19へ向かう往路と、排土場19から積荷場18へ向かう復路とで構成されている。走行路L2は、走行路L1から分岐して給油設備7へ向かう走行路であり、走行路L1から給油設備7へ向かう往路と、給油設備7から走行路L1へ向かう復路とで構成されている。そして、運搬機械5は、走行路L1に沿って、積荷場18と排土場(荷下ろし場)19との間を往復する。また、運搬機械5は、走行することにより燃料が消費され、燃料の残量が少なくなると、走行路L2に沿って、給油設備7に向かって走行する。
【0031】
給油設備7は、燃料供給装置31と、制御部33(図3参照)とを有している。燃料供給装置31は、給油設備7に入ってきた運搬機械5の給油口に図示しない給油ホースが作業者により接続されると、給油口を介して運搬機械5に燃料を供給する。制御部33は、燃料供給装置31の稼働状況の情報である稼働情報を取得し、取得した稼働情報等の情報に基づいて、燃料供給装置31の稼働状況を監視する。
【0032】
中央管理制御設備8は、運搬機械5および給油設備7とは異なる場所に設けられており、運搬機械5の運転状況監視可能に構成されている。中央管理制御設備8は、管理コントローラ41と、通信部42とを有している。通信部42は、運搬機械5と管理コントローラ41との間で無線通信を行っており、位置情報、後述する燃料量情報および実行可否情報等の情報の送受信を行っている。管理コントローラ41は、通信部42を介して取得した情報に基づく制御を行っている。具体的に、管理コントローラ41は、運搬機械5から送信された上記した情報に基づいて、運搬機械5の位置を認識したり、運搬機械5の運転状況を管理したりしている。
【0033】
従って、この荷物運搬システム1では、中央管理制御設備8において、運搬機械5の運転状況が管理され、管理された運搬機械5の運転状況に基づく制御が行われる。例えば、運搬機械5の運転状況としては、運搬機械5へ燃料を供給する状況である。詳細は後述するが、荷物運搬システム1において、中央管理制御設備8が運搬機械5の運転状況から、運搬機械5に燃料を供給する必要があると判定する。すると、中央管理制御設備8は、運搬機械5への燃料の供給を報知する許可情報を、中央管理制御設備8の通信部42および運搬機械5の通信部14を介して、運搬機械5の制御部16に許可情報を送信する。制御部16は、取得した許可情報に基づく制御を実行することで、運搬機械5への燃料の供給を報知できる。以下、図3を参照して、運搬機械5に燃料を供給する燃料の給油システム50について具体的に説明する。なお、運搬機械5への燃料の供給を報知する制御は一例であり、荷物運搬システム1では、この制御の他、走行路Lの路面状況を報知する制御等を行っている。
【0034】
<燃料の給油システムの構成>
図3は、実施例1の燃料の給油システムの構成を示すブロック図である。上記のように構成された荷物運搬システム1には、運搬機械5に対し燃料を供給するための燃料の給油システム(給油システム)50が組み込まれている。
【0035】
給油システム50は、給油設備7に進入した運搬機械5に、燃料供給装置31から燃料を供給するシステムである。図3に示すように、この給油システム50は、上記した運搬機械(土木機械)5と、上記した給油設備7と、上記した中央管理制御設備(制御装置)8とで構成されている。
【0036】
中央管理制御設備8は、燃料を運搬機械5へ供給するか否かの情報である供給情報と、燃料の運搬機械5への供給が実行可能であるか否かの情報である実行可否情報とを取得可能に構成されている。供給情報および実行可否情報は、通信部42を介して、管理コントローラ41に入力される。
【0037】
また、給油システム50には、運搬機械5に荷物が積載されているか否かを検出する荷物検出装置と、運搬機械5の燃料量を検出する燃料計52と、走行路Lの路面状況等の情報を報知する報知装置105とが設けられている。荷物検出装置としては、例えば、運搬機械5に積載された荷物の搭載量を検出するペイロードメータ(搭載量検出装置)51が用いられている。ペイロードメータ51、燃料計52および報知装置105は、運搬機械5に設けられている。
【0038】
ペイロードメータ51は、例えば、車両本体11の駆動輪17を支持するサスペンションの圧力を検出する圧力センサの検出圧力に基づいて、運搬機械5に積載された荷物の搭載量を検出している。このペイロードメータ51は、制御部16に接続されており、検出した搭載量を積載情報として、制御部16へ向けて出力する。積載情報とは、積載部としてのベッセル12に荷物が積載されているか否かを判別するための情報である。制御部16は、入力された積載情報を実行可否情報として、通信部14および通信部42を介して中央管理制御設備8へ向けて送信する。
【0039】
燃料計52は、車両本体11に設けられた燃料タンクに溜まった燃料量を計測している。この燃料計52は、制御部16に接続されており、検出した燃料量を燃料量情報として、制御部16へ向けて出力する。制御部16は、入力された燃料量情報を供給情報として、通信部14および通信部42を介して中央管理制御設備8へ向けて送信する。
【0040】
報知装置105は、例えば、表示モニターであり、運搬機械5の運転室に設けられている。この報知装置105は、制御部16に接続されており、制御部16から入力される情報を、運搬機械5の操作者へ向けて報知可能に表示している。報知装置105に表示される情報は、操作者にとって必要な情報となっている。前記情報は、例えば、ペイロードメータ51により検出された積載情報、燃料計52により検出された燃料量情報、管理コントローラ41から送信された走行路Lの路面状況に関する路面情報、後述する警告情報、後述する許可情報等である。
【0041】
中央管理制御設備8は、通信部42を介して、管理コントローラ41に燃料量情報および積載情報が入力される。管理コントローラ41は、入力された燃料量情報を取得すると、取得した燃料量情報に基づいて、運搬機械5に燃料を供給するか否かを判定する。また、管理コントローラ41は、入力された積載情報を取得すると、取得した積載情報に基づいて、運搬機械5に荷物が積載されているか否かを判定することで、運搬機械5への燃料の給油が実行可能であるか否かを判定する。つまり、管理コントローラ41は、運搬機械5に荷物が積載されていると判定した場合、運搬機械5への燃料の給油は実行不能であると判定する。一方、管理コントローラ41は、運搬機械5に荷物が積載されていないと判定した場合、運搬機械5への燃料の給油は実行可能であると判定する。そして、管理コントローラ41は、運搬機械5への燃料の給油が実行不能であると判定すると、運搬機械5の給油設備7への進入を規制するための進入規制制御を実行する。一方、管理コントローラ41は、運搬機械5への燃料の給油が実行可能であると判定すると、運搬機械5の給油設備7への進入を許容するための進入許容制御を実行する。
【0042】
具体的に、管理コントローラ41は、取得した燃料量情報から運搬機械5に燃料を供給すると判定した場合、取得した積載情報から運搬機械5に荷物が積載されていると判定すると、運搬機械5が給油設備7へ進入することを規制する旨の警告情報を報知装置105に報知させる進入規制報知制御を、進入規制制御として実行する。これにより、報知装置105には警告情報が表示され、運搬機械5の操作者は、報知装置105に表示された警告情報を視認することで、排土場19へ向けて運搬機械5を走行させるという適切な操作を行うことが可能となる。
【0043】
一方で、管理コントローラ41は、取得した燃料量情報から運搬機械5に燃料を供給すると判定した場合、取得した積載情報から運搬機械5に荷物が積載されていないと判定すると、運搬機械5が給油設備7へ進入することを許容する旨の許可情報を報知装置105に報知させる進入許容報知制御を、進入許容制御として実行する。これにより、報知装置105には許可情報が表示され、運搬機械5の操作者は、報知装置105に表示された許可情報を視認することで、給油設備7へ向けて運搬機械5を走行させるという適切な操作を行うことが可能となる。
【0044】
なお、報知装置105は、警告情報および許可情報を表示するが、警告情報としては、例えば、表示モニター上に進入規制を意味する赤色の背景を表示すると共に、「進入禁止」等の警告メッセージを表示してもよい。一方、許可情報としては、例えば、表示モニター上に進入許容を意味する緑色の背景を表示すると共に、「進入許可」等の許可メッセージを表示してもよい。また、この構成に限らず、報知装置105を、複数のランプで構成してもよい。つまり、複数のランプは、少なくとも緑ランプと赤ランプとを有し、警告情報として赤ランプを、許可情報として緑ランプを点灯させてもよい。また、報知装置105は、警告情報および許可情報を表示することで、運搬機械5の操作者へ向けて報知を行ったが、この構成に限らず、例えば、運搬機械5の運転室に設けられたスピーカーを報知装置105として用い、スピーカーから音声ガイドを発することで、運搬機械5の操作者へ向けて報知を行ってもよい。
【0045】
<給油システムの制御動作>
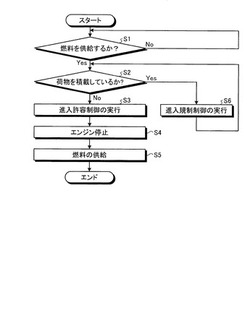
図4は、実施例1の燃料の給油システムの制御動作に関するフローチャートである。図4を参照して、上記のように構成した給油システム50の制御動作について説明する。運搬機械5の制御部16は、ペイロードメータ51から積載情報を取得すると共に、燃料計52から燃料量情報を取得する。制御部16は、取得した積載情報および燃料量情報を、通信部14を介して中央管理制御設備8へ向けて送信する。送信された燃料量情報および積載情報は、中央管理制御設備8の通信部42を介して管理コントローラ41に入力されることで、管理コントローラ41は、燃料量情報および積載情報を取得する。管理コントローラ41は、取得した燃料量情報に基づいて、運搬機械5に燃料を供給するか否かを判定する(ステップS1)。
【0046】
管理コントローラ41は、取得した燃料量情報から、運搬機械5に燃料を供給すると判定する(ステップS1:Yes)と、取得した積載情報に基づいて、運搬機械5のベッセル12に荷物を積載しているか否かを判定する(ステップS2)。一方で、管理コントローラ41は、取得した燃料量情報から、運搬機械5に燃料を供給しないと判定する(ステップS1:No)と、再びステップS1を処理する。
【0047】
管理コントローラ41は、取得した積載情報から、運搬機械5のベッセル12に荷物を積載していると判定する(ステップS2:Yes)と、運搬機械5の操作者へ向けて警告情報を報知する進入規制報知制御を実行する(ステップS6:進入規制制御の実行)。進入規制報知制御が実行されると、管理コントローラ41は、通信部42を介して運搬機械5へ向けて警告情報を送信する。送信された警告情報は、運搬機械5の通信部14で取得され、通信部14は、取得した警告情報を制御部16へ向けて出力する。制御部16は、通信部14から出力された警告情報を取得すると、報知装置105に警告情報を表示する。そして、報知装置105が警告情報を表示すると、運搬機械5の操作者は、給油設備7への進入が規制されていることを把握できるので、運搬機械5を排土場19へ向けて走行させることができる。この後、管理コントローラ41は、ステップS6の実行後、ステップS2へ進み、運搬機械5の荷物が下ろされるまで、ステップS6とステップS2とを繰り返す。
【0048】
管理コントローラ41は、ステップS2において、取得した積載情報から、運搬機械5のベッセル12に荷物を積載していないと判定する(ステップS2:No)と、運搬機械5の操作者へ向けて進入許可情報を報知する進入許容報知制御を実行する(ステップS3:進入許容制御の実行)。進入許容報知制御が実行されると、管理コントローラ41は、通信部42を介して運搬機械5へ向けて許可情報を送信する。送信された許可情報は、運搬機械5の通信部14で取得され、通信部14は、取得した許可情報を制御部16へ向けて出力する。制御部16は、通信部14から出力された許可情報を取得すると、報知装置105に許可情報を表示する。そして、報知装置105が許可情報を表示すると、運搬機械5の操作者は、給油設備7への進入が許容されていことを把握できるので、運搬機械5を給油設備7へ向けて走行させることができる。この後、運搬機械5が給油設備7に進入し、燃料供給装置31による燃料供給が可能な位置に停車すると、運搬機械5の操作者は、運搬機械5のエンジンを停止させる(ステップS4)。そして、エンジンが停止した運搬機械5の給油口に図示しない給油ホースが作業者により接続されると、給油設備7の燃料供給装置31は、運搬機械5へ向けて燃料の供給を行う(ステップS5)。
【0049】
以上のように、実施例1の構成によれば、管理コントローラ41は、運搬機械5に荷物が積載されている場合、運搬機械5への燃料の供給が実行不能であるとして、報知装置105から運搬機械5の操作者へ向けて警告情報を報知することができる。このため、運搬機械5の操作者は、運搬機械5を給油設備7へ向かって走行させずに、排土場19へ向かって走行させることができる。これにより、実施例1の燃料の給油システム50は、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。また、運搬機械5は、荷物を積載した状態で給油設備7に進入することがないため、荷物の落下による給油設備7への損傷を抑制したり、落下した荷物を掃除する手間を省いたりすることができる。落下した荷物の掃除中は、給油設備7における給油が制限されるが、実施例1は、落下した荷物を掃除する手間を省くことができるので、給油設備7における給油の制限を抑制することができ、結果として生産性の低下を抑制できる。また、給油設備7への荷物の落下が回避できるので、落下した荷物により他の運搬機械5が給油設備7に進入できなくなって生産性が低下することを回避することができる。
【0050】
また、実施例1の構成によれば、管理コントローラ41は、ペイロードメータ51によって検出された荷物の積載量に基づいて、運搬機械5に荷物が積載されているか否かを判定することができる。このため、運搬機械5に設けられている既存のペイロードメータ51を有効に活用することができる。
【0051】
なお、実施例1では、報知装置105に警告情報および許可情報を表示したが、警告情報として、「進入禁止」等の警告メッセージと共に、「排土場へ向かって下さい」等の排土作業を促すメッセージを運搬機械5の操作者へ向けて表示してもよい。また、許可情報として、「進入許可」等の許可メッセージと共に、「給油設備へ向かって下さい」等の給油作業を促すメッセージを運搬機械5の操作者へ向けて表示してもよい。
【実施例2】
【0052】
次に、図5および図6を参照して、実施例2の燃料の給油システム110について説明する。図5は、実施例2の運搬機械が走行する走行路の説明図であり、図6は、実施例2の燃料の給油システムの構成を示すブロック図である。なお、実施例2の燃料の給油システム110では、重複した記載を避けるべく、実施例1の燃料の給油システム50と異なる部分についてのみ説明する。実施例1の給油システム50では、報知装置105を運搬機械5の運転室に表示モニターとして設けたが、実施例2の給油システム110では、運搬機械5の外部に報知装置115が設けられている。
【0053】
<燃料の給油システムの構成>
図5に示すように、報知装置115は、走行路L1と走行路L2との分岐路に設けられた信号機や電光掲示板等の警報機であり、運搬機械5を操作する操作者に向けて情報を報知している。情報は、例えば、路面情報、警告情報、許可情報等である。報知装置115は、走行路L1を走行する運搬機械5の上方で、運搬機械5の走行を妨げない位置に設けられている。また、報知装置115は、運搬機械5を操作する操作者へ向けて視認性を高めるべく、走行路L1の延在する方向に対して直交する面を表示面115aとしている。なお、表示面115aは、走行路L1の往路および復路からの視認が可能なように、両面に設けてもよい。
【0054】
この報知装置115は、図6に示すように、中央管理制御設備8の通信部42と通信可能な通信部116を有している。報知装置115は、通信部42および通信部116を介して、中央管理制御設備8の管理コントローラ41によって制御されている。このため、管理コントローラ41は、運搬機械5の操作者にとって必要な情報を報知装置115に表示させることが可能となっている。
【0055】
ここで、報知装置115による情報の報知は、好ましくは、報知装置115の情報を操作者が視認可能な位置まで、運搬機械5が近づいたときに行われる。例えば、管理コントローラ41は、運搬機械5の位置検出部15から送信される位置情報および運搬機械5の固有ID等の識別情報を取得すると共に、報知装置115の位置情報を取得する。そして、管理コントローラ41は、識別情報から報知対象となる運搬機械5を特定すると共に、特定の運搬機械5と報知装置115との距離が所定距離以下となったら情報を報知する。
【0056】
管理コントローラ41は、ペイロードメータ51により検出された積載情報と燃料計52により検出された燃料量情報とを、通信部42を介して運搬機械5から取得する。管理コントローラ41は、取得した燃料量情報から運搬機械5に燃料を供給すると判定した場合に、取得した積載情報から運搬機械5に荷物が積載されていると判定すると、運搬機械5が給油設備7へ進入することを規制する旨の警告情報を報知装置115に報知させる進入規制報知制御を、進入規制制御として実行する。進入規制報知制御が実行され、運搬機械5と報知装置115との距離が所定距離以下となると、管理コントローラ41は、報知装置115に警告情報を表示することで、運搬機械5の操作者へ警告情報を報知する。
【0057】
一方で、管理コントローラ41は、取得した燃料量情報から運搬機械5に燃料を供給すると判定した場合に、取得した積載情報から運搬機械5に荷物が積載されていないと判定すると、運搬機械5が給油設備7へ進入することを許容する旨の許可情報を報知装置115に報知させる進入許容報知制御を、進入許容制御として実行する。進入許容報知制御が実行され、運搬機械5と報知装置115との距離が所定距離以下となると、管理コントローラ41は、報知装置115に許可情報を表示することで、運搬機械5の操作者へ許可情報を報知する。なお、給油システム110の制御動作については、実施例1と同様であるため説明を省略する。
【0058】
ここで、報知装置115として、電光掲示板が適用される場合、報知装置115は、警告情報および許可情報を文章および絵柄で報知してもよい。また、報知装置115として、信号機が適用される場合、信号機は、少なくとも青信号と赤信号とを有し、警告情報として赤信号を、許可情報として青信号を点灯させて報知してもよい。さらに、報知装置115は、報知時において警告音を発生させてもよい。なお、管理コントローラ41は、電光掲示板および信号機等の報知装置115を用いる場合であっても、特定の運搬機械5に対する報知が可能なように、運搬機械5の識別情報を取得して、識別情報から報知対象となる運搬機械5を特定している。
【0059】
以上のように、実施例2の構成においても、管理コントローラ41は、運搬機械5に荷物が積載されている場合、運搬機械5への燃料の供給が実行不能であるとして、報知装置115から運搬機械5の操作者へ向けて警告情報を報知することができる。このため、運搬機械5の操作者は、運搬機械5を給油設備7へ向かって走行させずに、排土場19へ向かって走行させることができる。これにより、実施例2の燃料の給油システム110は、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。
【実施例3】
【0060】
次に、図7および図8を参照して、実施例3の燃料の給油システム120について説明する。図7は、実施例3の運搬機械が走行する走行路の説明図であり、図8は、実施例3の燃料の給油システムの構成を示すブロック図である。なお、実施例3の燃料の給油システム120でも、重複した記載を避けるべく、実施例2の燃料の給油システム110と異なる部分についてのみ説明する。実施例2の給油システム110では、運搬機械5の外部に報知装置115を設けたが、実施例3の給油システム120では、報知装置115に代えて、ゲート装置125が設けられている。
【0061】
<燃料の給油システムの構成>
図7に示すように、ゲート装置125は、走行路L2上に設けられており、運搬機械5の給油設備7への進入を規制可能な構成となっている。このとき、ゲート装置125は、走行路L2において、走行路L1から給油設備7へ向かう往路に配置されている。このゲート装置125は、開閉可能なゲートバー125aを有し、ゲートバー125aを閉動作させることで、給油設備7への進入を規制する一方で、ゲートバー125bを開動作させることで、給油設備7への進入を許容する。
【0062】
このゲート装置125は、図8に示すように、中央管理制御設備8の通信部42と通信可能な通信部126を有している。ゲート装置125は、通信部42および通信部126を介して、中央管理制御設備8の管理コントローラ41によって制御されている。このため、管理コントローラ41は、ゲート装置125の開閉動作を制御することが可能となっている。
【0063】
ここで、ゲート装置125による開閉動作は、好ましくは、運搬機械5がゲート装置125に近づいたときに行われる。例えば、管理コントローラ41は、運搬機械5の位置検出部15から送信される位置情報および運搬機械5の固有ID等である識別情報を取得すると共に、ゲート装置125の位置情報を取得している。そして、管理コントローラ41は、識別情報から報知対象となる運搬機械5を特定すると共に、特定の運搬機械5とゲート装置125との距離が所定距離以下となったら、ゲート装置125による開閉動作を行わせる。
【0064】
管理コントローラ41は、ペイロードメータ51により検出された積載情報と燃料計52により検出された燃料量情報とが、運搬機械5から通信部42を介して入力される。管理コントローラ41は、取得した燃料量情報から運搬機械5に燃料を供給すると判定した場合に、取得した積載情報から運搬機械5に荷物が積載されていると判定すると、ゲート装置125を制御して、運搬機械5が給油設備7へ進入することを規制するゲート規制制御を、進入規制制御として実行する。ゲート規制制御が実行され、運搬機械5とゲート装置125との距離が所定距離以下となると、管理コントローラ41は、ゲート装置125のゲートバー125aを閉動作させる。
【0065】
一方で、管理コントローラ41は、取得した燃料量情報から運搬機械5に燃料を供給すると判定した場合に、取得した積載情報から運搬機械5に荷物が積載されていないと判定すると、ゲート装置125を制御して、運搬機械5が給油設備7へ進入することを許容するゲート許容制御を、進入許容制御として実行する。ゲート許容制御が実行され、運搬機械5とゲート装置125との距離が所定距離以下となると、管理コントローラ41は、ゲート装置125のゲートバー125aを開動作させる。なお、給油システム120の制御動作については、実施例1とほぼ同様であり、図4のステップS3をゲート許容制御とし、図4のステップS6をゲート規制制御とすればよいため説明を省略する。
【0066】
以上のように、実施例3の構成においても、管理コントローラ41は、運搬機械5に荷物が積載されている場合、運搬機械5への燃料の供給が実行不能であるとして、ゲート規制制御を実行することにより、運搬機械5による給油設備7への進入を規制することができる。このため、運搬機械5の操作者は、運搬機械5を給油設備7へ向かって走行させることがないため、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。
【実施例4】
【0067】
次に、実施例4の燃料の給油システムについて説明する。なお、実施例4の燃料の給油システムでも、重複した記載を避けるべく、実施例2および3の燃料の給油システム110,120と異なる部分についてのみ説明する。実施例2および3の給油システム110,120では、中央管理制御設備8により、運搬機械5の外部に設けられた報知装置115またはゲート装置125を制御して進入規制制御を実行したが、実施例4の給油システムでは、中央管理制御設備8に代えて、給油設備7が、報知装置115またはゲート装置125を制御して進入規制制御を実行している。このため、実施例4の燃料の給油システムでは、中央管理制御設備8の構成は必須ではない。以下、ゲート装置125を適用した実施例4の燃料の給油システムについて、図8を参照しながら説明する。
【0068】
<燃料の給油システムの構成>
図8の点線で示すように、ゲート装置125は、給油設備7に接続されており、給油設備7の制御部33は、ゲート装置125を制御可能となっている。このため、制御部33は、ゲート装置125の開閉動作を制御することが可能となっている。また、給油設備7は、通信部32を有している。通信部32は、制御部33に接続され、給油設備7の制御部33と運搬機械5および中央管理制御設備8との間で無線通信を行っており、燃料量情報および実行可否情報等の情報の送受信を行っている。
【0069】
ここで、ゲート装置125による開閉動作は、運搬機械5がゲート装置125に近づいたときに行われる。例えば、給油設備7の制御部33は、運搬機械5の位置検出部15から送信される位置情報を取得すると共に、ゲート装置125の位置情報を取得する。なお、運搬機械5の位置情報は、運搬機械5から直接的に送信されてもよいし、中央管理制御設備8を介して間接的に送信されてもよい。そして、制御部33は、運搬機械5とゲート装置125との距離が所定距離以下となったら、ゲート装置125による開閉動作を行わせる。
【0070】
運搬機械5は、ペイロードメータ51により検出した積載情報および燃料計52により検出した燃料量情報を、通信部14および通信部32を介して給油設備7へ向けて送信する。給油設備7は、通信部32を介して、制御部33に燃料量情報および積載情報が入力される。制御部33は、入力された燃料量情報を取得すると、取得した燃料量情報に基づいて、運搬機械5に燃料を供給するか否かを判定する。また、制御部33は、入力された積載情報を取得すると、取得した積載情報に基づいて、運搬機械5に荷物が積載されているか否かを判定する。
【0071】
つまり、制御部33は、取得した積載情報から、運搬機械5が荷物を積載していると判定すると、ゲート装置125を制御してゲート規制制御を実行する。ゲート規制制御が実行され、運搬機械5とゲート装置125との距離が所定距離以下となると、制御部33は、ゲート装置125のゲートバー125aを閉動作させる。
【0072】
一方で、制御部33は、取得した積載情報から、運搬機械5が荷物を積載していないと判定すると、ゲート装置125を制御してゲート許容制御を実行する。ゲート許容制御が実行され、運搬機械5とゲート装置125との距離が所定距離以下となると、制御部33は、ゲート装置125のゲートバー125aを開動作させる。なお、実施例4の給油システムの制御動作については、実施例3とほぼ同様であるため説明を省略する。
【0073】
以上のように、実施例4の構成においても、制御部33は、運搬機械5に荷物が積載されている場合、運搬機械5への燃料の供給が実行不能であるとして、ゲート規制制御を実行することにより、運搬機械5による給油設備7への進入を規制することができる。このため、運搬機械5の操作者は、運搬機械5を給油設備7へ向かって走行させることがないため、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。なお、ゲート装置125に代えて、報知装置115とする場合も同様である。
【実施例5】
【0074】
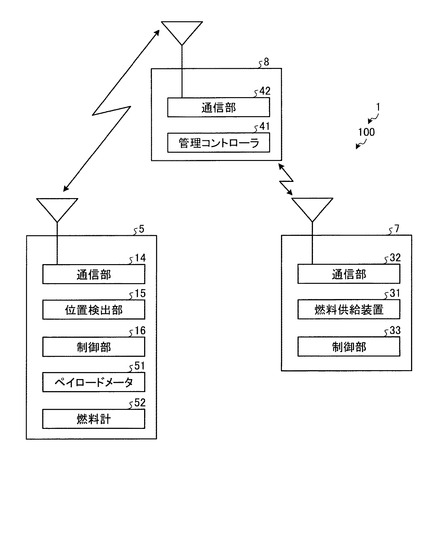
次に、図9を参照して、実施例5の燃料の給油システム100について説明する。図9は、実施例5の燃料の給油システムの構成を示すブロック図である。なお、実施例5の燃料の給油システム100でも、重複した記載を避けるべく、実施例1と異なる部分についてのみ説明する。実施例1の給油システム50では、通常の(有人の)運搬機械5を用いたが、実施例5の給油システム100では、無人の運搬機械5を用いている。
【0075】
<燃料の給油システムの構成>
実施例5の燃料の給油システム100は、実施例1と同様に荷物運搬システム1に組み込まれており、上記した運搬機械(土木機械)5と、給油設備7と、上記した中央管理制御設備(制御装置)8とで構成されている。また、実施例5の燃料の給油システム100では、実施例1の報知装置105を廃した構成となっている。
【0076】
無人の運搬機械5は、制御部16に制御されており、制御部16が、取得した走行路Lおよび目標速度などの情報に基づいて、運搬機械5のステアリングおよび駆動輪17などの各部における動作を制御することで、荷物を所定の走行路Lに沿って運搬している。この制御部16は、運搬機械5の通信部14および中央管理制御設備8の通信部42を介して中央管理制御設備8の管理コントローラ41と相互に情報をやり取りすることができるようになっている。このため、無人の運搬機械5は、管理コントローラ41により制御可能となっている。
【0077】
中央管理制御設備8の管理コントローラ41は、ペイロードメータ51により検出された積載情報と燃料計52により検出された燃料量情報とが、運搬機械5から通信部42を介して入力される。管理コントローラ41は、取得した燃料量情報から運搬機械5に燃料を供給すると判定した場合に、取得した積載情報から運搬機械5に荷物が積載されていると判定すると、運搬機械5の給油設備7への進入動作を規制し、運搬機械5を排土場19へ向けて配車する進入動作規制制御を進入規制制御として実行する。これにより、管理コントローラ41は、運搬機械5への燃料供給を阻害する要因となる荷物の積載を早期に解消することが可能となる。その結果、燃料の給油システム100は、運搬機械5の生産性低下を抑制することができる。
【0078】
一方で、管理コントローラ41は、取得した燃料量情報から運搬機械5に燃料を供給すると判定した場合に、取得した積載情報から運搬機械5に荷物が積載されていないと判定すると、運搬機械5による給油設備7への進入を許容し、運搬機械5を給油設備7へ向けて配車する進入動作許容制御を進入許容制御として実行する。これにより、管理コントローラ41は、運搬機械5への燃料供給を円滑に実行することが可能となる。その結果、燃料の給油システム100は、運搬機械5の生産性低下を抑制することができる。
【0079】
<給油システムの制御動作>
ここで、上記のように構成した給油システム100の制御動作について簡単に説明する。なお、実施例5の給油システム100の制御動作は、実施例1の給油システム50の制御動作とほぼ同様の構成となっているため、図4を参照しつつ、異なる部分のみ説明する。
【0080】
ステップS1において、管理コントローラ41が、取得した燃料量情報から運搬機械5に燃料を供給すると判定する(ステップS1:Yes)と、取得した積載情報に基づいて、運搬機械5に荷物が積載されているか否かを判定する(ステップS2)。
【0081】
管理コントローラ41は、取得した積載情報から、運搬機械5が荷物を積載していると判定する(ステップS2:Yes)と、運搬機械5による給油設備7への進入動作を規制する進入動作規制制御を実行する(ステップS6:進入規制制御の実行)。進入動作規制制御が実行されると、管理コントローラ41は、無人の運搬機械5を制御して、運搬機械5を排土場19へ向けて配車する。
【0082】
一方で、管理コントローラ41は、ステップS2において、取得した積載情報から、運搬機械5が荷物を積載していないと判定する(ステップS2:No)と、運搬機械5による給油設備7への進入動作を許容する進入動作許容制御を実行する(ステップS3:進入許容制御の実行)。進入動作許容制御が実行されると、管理コントローラ41は、無人の運搬機械5を制御して、運搬機械5を給油設備7へ向けて配車する。
【0083】
以上のように、実施例5の構成によれば、管理コントローラ41は、運搬機械5に荷物が積載されている場合、運搬機械5への燃料の供給が実行不能であるとして、運搬機械5による給油設備7への進入を規制することができる。このため、管理コントローラ41は、運搬機械5が給油設備7へ進入することによって生じる生産性の低下を抑制することができる。
【0084】
また、実施例5の構成によれば、管理コントローラ41は、運搬機械5に荷物が積載されている場合、運搬機械5を排土場19へ向けて配車することができる。このため、管理コントローラ41は、運搬機械5への燃料の供給を早期に実行可能とすることができ、生産性の向上を図ることができる。
【0085】
なお、実施例1から5の構成では、荷物検出装置として、ペイロードメータ51を適用したが、この構成に限らず、荷物検出装置として、撮像カメラ(撮像装置)を適用してもよい。以下、簡単に説明すると、撮像カメラは、走行路L1に設けられ、走行路L1に沿って走行する運搬機械5のベッセル12を撮像する。この撮像カメラは、中央管理制御設備8へ向けて、撮像した画像を積載情報として送信可能となっている。管理コントローラ41は、入力された積載情報を取得すると、取得した積載情報を画像解析して、運搬機械5に荷物が積載されているか否かを判定する。管理コントローラ41は、取得した積載情報から、運搬機械5が荷物を積載していると判定すると、進入規制制御を実行する。
【0086】
この構成によれば、ペイロードメータ51に代えて、撮像カメラを用いることができるため、運搬機械5に積載された荷物の有無を視認により判定することができる。なお、撮像カメラは、給油設備7に接続し、給油設備7の制御部33へ向けて積載情報を出力してもよい。
【0087】
また、実施例1から5の構成では、荷物検出装置として、ペイロードメータ51を適用したが、この構成に限らず、荷物検出装置として、車重計(重量測定装置)を適用してもよい。以下、簡単に説明すると、車重計は、走行路L1に設けられ、走行路L1に沿って走行する運搬機械5の車重を計測する。この車重計は、中央管理制御設備8へ向けて、計測した車重を積載情報として送信可能となっている。管理コントローラ41は、入力された積載情報を取得すると、取得した積載情報に基づいて、運搬機械5に荷物が積載されているか否かを判定する。管理コントローラ41は、取得した積載情報から、運搬機械5が荷物を積載していると判定すると、進入規制制御を実行する。
【0088】
この構成によれば、ペイロードメータ51に代えて、車重計を用いることができるため、運搬機械5に積載された荷物の有無を車重により判定することができる。なお、車重計は、給油設備7に接続し、給油設備7の制御部33へ向けて積載情報を出力してもよい。
【実施例6】
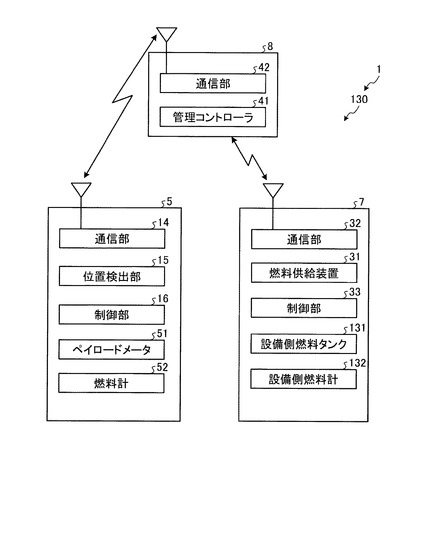
【0089】
次に、図10を参照して、実施例6の燃料の給油システム130について説明する。図10は、実施例6の燃料の給油システムの構成を示すブロック図である。なお、実施例6の燃料の給油システム130でも、重複した記載を避けるべく、実施例1の燃料の給油システム50と異なる部分についてのみ説明する。実施例1の給油システム50では、荷物検出装置であるペイロードメータ51から検出される積載情報を、実行可否情報として取得したが、実施例6の給油システム130では、給油設備7の燃料の燃料量を実行可否情報として取得している。
【0090】
<燃料の給油システムの構成>
給油設備7は、実施例4と同様の通信部32と、燃料を溜める設備側燃料タンク131と、設備側燃料タンク131の燃料量を検出する設備側燃料計(設備側燃料量検出装置)132とをさらに有している。設備側燃料計132は、給油設備7の制御部33に接続されており、検出した燃料の燃料量を設備側燃料量情報として、制御部33へ向けて出力する。制御部33は、入力された設備側燃料量情報を実行可否情報として、通信部32および通信部42を介して中央管理制御設備8へ向けて送信する。中央管理制御設備8の管理コントローラ41に設備側燃料量情報が入力されると、管理コントローラ41は、給油設備7に燃料がないと判定した場合、運搬機械5への燃料の給油は実行不能であると判定して、進入規制制御を実行する。一方で、管理コントローラ41は、給油設備7に燃料があると判定した場合、運搬機械5への燃料の給油は実行可能であると判定して、進入許容制御を実行する。なお、実施例6の給油システム130の制御動作についても、実施例1とほぼ同様であるため説明を省略する。
【0091】
以上の構成によれば、管理コントローラ41は、給油設備7に燃料がない場合、運搬機械5への燃料の供給が実行不能であるとして、運搬機械5の給油設備7への進入を規制することができるため、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。なお、実施例6の構成は、実施例2から5にも適用可能である。
【実施例7】
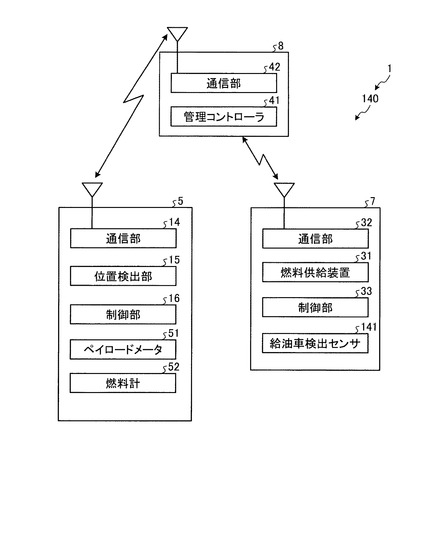
【0092】
次に、図11を参照して、実施例7の燃料の給油システム140について説明する。図11は、実施例7の燃料の給油システムの構成を示すブロック図である。なお、実施例7の燃料の給油システム140でも、重複した記載を避けるべく、実施例1の燃料の給油システム50と異なる部分についてのみ説明する。実施例1の給油システム50では、荷物検出装置であるペイロードメータ51から検出される積載情報を、実行可否情報として取得したが、実施例7の給油システム140では、給油設備7に配車された給油車の有無を実行可否情報として取得している。
【0093】
<燃料の給油システムの構成>
給油設備7には、運搬機械5へ燃料を供給する給油車が配車されており、給油車の有無を給油車有無情報として検出可能な給油車検出センサ141と、実施例4と同様の通信部32とが設けられている。給油車検出センサ141は、給油設備7の制御部33に接続されており、検出した給油車の有無を給油車有無情報として、制御部33へ向けて出力する。制御部33は、入力された給油車有無情報を実行可否情報として、通信部32および通信部42を介して中央管理制御設備8へ向けて送信する。中央管理制御設備8の管理コントローラ41に給油車有無情報が入力されると、管理コントローラ41は、給油設備7に給油車がいないと判定した場合、運搬機械5への燃料の給油は実行不能であると判定して、進入規制制御を実行する。一方で、管理コントローラ41は、給油設備7に給油車がいると判定した場合、運搬機械5への燃料の給油は実行可能であると判定して、進入許容制御を実行する。なお、実施例7の給油システム140の制御動作についても、実施例1とほぼ同様であるため説明を省略する。
【0094】
以上の構成によれば、管理コントローラ41は、給油設備7に給油車がいない場合、運搬機械5への燃料の供給が実行不能であるとして、運搬機械5の給油設備7への進入を規制することができるため、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。なお、実施例7の構成は、実施例2から5にも適用可能である。
【実施例8】
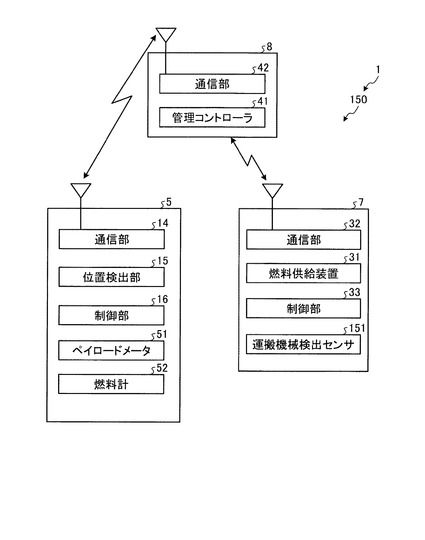
【0095】
次に、図12を参照して、実施例8の燃料の給油システム150について説明する。図12は、実施例8の燃料の給油システムの構成を示すブロック図である。なお、実施例8の燃料の給油システム150でも、重複した記載を避けるべく、実施例1の燃料の給油システム50と異なる部分についてのみ説明する。実施例1の給油システム50では、荷物検出装置であるペイロードメータ51から検出される積載情報を、実行可否情報として取得したが、実施例8の給油システム150では、給油設備7の稼働状況を実行可否情報として取得している。
【0096】
<燃料の給油システムの構成>
給油設備7には、燃料を供給するために運搬機械5が配車されており、設備内の稼働状況を稼働情報として検出可能な稼働状況検出装置と、実施例4と同様の通信部32とが設けられている。稼働状況検出装置は、例えば、燃料供給中の運搬機械5の有無を検出可能な運搬機械検出センサ151であり、運搬機械検出センサ151は、給油設備7の制御部33に接続され、運搬機械5の有無から得られる稼働状況を稼働情報として、制御部33へ向けて出力する。制御部33は、入力された稼働情報を実行可否情報として、通信部32および通信部42を介して中央管理制御設備8へ向けて送信する。中央管理制御設備8の管理コントローラ41に稼働情報が入力されると、管理コントローラ41は、給油設備7が満車であると判定した場合、運搬機械5への燃料の給油は実行不能であると判定して、進入規制制御を実行する。一方で、管理コントローラ41は、給油設備7が満車でないと判定した場合、運搬機械5への燃料の給油は実行可能であると判定して、進入許容制御を実行する。なお、実施例8の給油システム150の制御動作についても、実施例1とほぼ同様であるため説明を省略する。
【0097】
以上の構成によれば、管理コントローラ41は、給油設備7が満車である場合、運搬機械5への燃料の供給が実行不能であるとして、運搬機械5の給油設備7への進入を規制することができるため、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。なお、実施例8の構成は、実施例2から5にも適用可能である。
【0098】
なお、実施例8の給油システム150では、稼働状況検出装置として、運搬機械検出センサ151を用いたが、この構成に限らず、運搬機械5に設けられた位置検出部15を用いてもよい。つまり、管理コントローラ41は、運搬機械5から送信される位置情報に基づいて、給油設備7に進入している運搬機械5を検出することができる。
【0099】
なお、実施例1から8の構成では、進入規制制御を、中央管理制御設備8の管理コントローラ41により実行したり、給油設備7の制御部33により実行したりしたが、この構成に限らず、運搬機械5の制御部16によって実行してもよい。つまり、中央管理制御設備8の管理コントローラ41または給油設備7の制御部33を用いずとも、運搬機械5の制御部16によって、進入規制制御を実行することが可能となっている。
【0100】
また、実施例1から8の構成では、給油設備7に入ってきた運搬機械5の給油口には、作業者により給油ホースが接続されたが、燃料供給装置31を自動化し、無人による給油を行ってもよい。
【実施例9】
【0101】
次に、実施例9の土木機械について説明する。なお、実施例9の土木機械は、実施例1の荷物運搬システム1に組み込まれている。なお、土木機械として、実施例1と同様に、ダンプトラック等の運搬機械5に適用して説明する。実施例1では、燃料の給油システム50において進入規制制御を実行したが、実施例9では、運搬機械5が進入規制制御を実行している。
【0102】
<運搬機械の構成>
図示は省略するが、運搬機械5は、実施例1と同様の報知装置(報知部)105を有している。つまり、ペイロードメータ51は、制御部16に接続されており、検出した搭載量を積載情報として、制御部16へ向けて出力する。燃料計52は、制御部16に接続されており、検出した燃料量を燃料量情報として、制御部16へ向けて出力する。報知装置105は、例えば、表示モニターであり、運搬機械5の運転室に設けられ、操作者へ向けて情報を報知している。
【0103】
運搬機械5の制御部16は、取得した燃料量情報から燃料を供給すると判定した場合、取得した積載情報からベッセル12に荷物が積載されていると判定すると、運搬機械5への燃料の給油は実行不能であるとし、給油設備7への進入を規制する旨の警告情報を、報知装置105により報知する進入規制報知制御を実行する。一方で、運搬機械5の制御部16は、取得した燃料量情報から燃料を供給すると判定した場合、取得した積載情報からベッセル12に荷物が積載されていないと判定すると、運搬機械5への燃料の給油は実行可能であるとし、給油設備7への進入を許容する旨の進入許可情報を、報知装置105により報知する進入許容報知制御を実行する。
【0104】
<運搬機械の制御動作>
ここで、上記のように構成した運搬機械5の制御動作について簡単に説明する。なお、実施例9の運搬機械5の制御動作は、実施例1の給油システム50の制御動作とほぼ同様の構成となっているため、図4を参照しながら異なる部分のみ説明する。
【0105】
燃料計52により検出した燃料量情報と、ペイロードメータ51により検出した積載情報とを運搬機械5の制御部16が取得する。すると、制御部16は、取得した燃料量情報に基づいて、運搬機械5に燃料を供給するか否かを判定する(ステップS1)。ステップS1において、制御部16が、取得した燃料量情報から運搬機械5に燃料を供給すると判定する(ステップS1:Yes)と、取得した積載情報に基づいて、運搬機械5に荷物が積載されているか否かを判定する(ステップS2)。
【0106】
制御部16は、取得した積載情報から、ベッセル12に荷物が積載されていると判定する(ステップS2:Yes)と、操作者へ向けて警告情報を報知する進入規制報知制御を実行する(ステップS6:進入規制制御)。進入規制報知制御が実行されると、制御部16は、報知装置105へ警告情報を表示する。一方で、制御部16は、ステップS2において、取得した積載情報から、ベッセル12に荷物が積載されていないと判定する(ステップS2:No)と、操作者へ向けて許可情報を報知する進入許容報知制御を実行する(ステップS3:進入許容制御)。進入許容報知制御が実行されると、制御部16は、報知装置105へ許可情報を表示する。
【0107】
以上のように、実施例9の構成によれば、運搬機械5の制御部16は、ベッセル12に荷物が積載されている場合、運搬機械5への燃料の供給が実行不能であるとして、報知装置105から操作者へ向けて警告情報を報知することができる。このため、運搬機械5の操作者は、運搬機械5を給油設備7へ向かって走行させずに、排土場19へ向かって走行させることができるため、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。また、運搬機械5が独立して進入規制制御を行うことができるため、構成を簡易なものとすることができる。
【実施例10】
【0108】
次に、実施例10の土木機械について説明する。実施例10の土木機械は、実施例1と同様に、ダンプトラック等の運搬機械5に適用し、また、重複した記載を避けるべく、実施例9と異なる部分についてのみ説明する。実施例9の運搬機械5は、進入規制制御を実行可能な通常の(有人の)運搬機械5であったが、実施例10の運搬機械5は、進入規制制御を実行可能な無人の運搬機械5である。
【0109】
<運搬機械の構成>
図示は省略するが、運搬機械5は、実施例1と同様の構成であり、車両本体11と、ベッセル12と、通信部14と、位置検出部15と、制御部16と、ペイロードメータ51と、燃料計52とを有している。ペイロードメータ51は、制御部16に接続されており、検出した搭載量を積載情報として、制御部16へ向けて出力する。燃料計52は、制御部16に接続されており、検出した燃料量を燃料量情報として、制御部16へ向けて出力する。
【0110】
運搬機械5の制御部16は、取得した燃料量情報から燃料を供給すると判定した場合、取得した積載情報からベッセル12に荷物が積載されていると判定すると、運搬機械5への燃料の給油は実行不能であるとし、給油設備7への進入動作を規制し、排土場19へ向けて走行させる進入動作規制制御を実行する。一方で、運搬機械5の制御部16は、取得した燃料量情報から燃料を供給すると判定した場合、取得した積載情報からベッセル12に荷物が積載されていないと判定すると、給油設備7への進入動作を許容し、給油設備7へ向けて走行させる進入動作許容制御を実行する。
【0111】
<運搬機械の制御動作>
ここで、上記のように構成した運搬機械5の制御動作について簡単に説明する。なお、実施例10の運搬機械5の制御動作は、実施例1の給油システム50の制御動作とほぼ同様の構成となっているため、図4を参照しつつ、異なる部分のみ説明する。
【0112】
燃料計52により検出した燃料量情報と、ペイロードメータ51により検出した積載情報とを運搬機械5の制御部16が取得する。すると、制御部16は、取得した燃料量情報に基づいて、運搬機械5に燃料を供給するか否かを判定する(ステップS1)。ステップS1において、制御部16が、取得した燃料量情報から運搬機械5に燃料を供給すると判定する(ステップS1:Yes)と、取得した積載情報に基づいて、運搬機械5に荷物が積載されているか否かを判定する(ステップS2)。
【0113】
制御部16は、取得した積載情報から、ベッセル12に荷物が積載されていると判定する(ステップS2:Yes)と、給油設備7への進入動作を規制する進入動作規制制御を実行する(ステップS6:進入規制制御)。進入動作規制制御を実行すると、制御部16は、車両本体11を排土場19へ向けて走行させる。一方で、制御部16は、ステップS2において、取得した積載情報から、ベッセル12に荷物が積載されていないと判定する(ステップS2:No)と、給油設備7への進入動作を許容する進入動作許容制御を実行する(ステップS3:進入許容制御)。進入動作許容制御を実行すると、制御部16は、車両本体11を給油設備7へ向けて走行させる。
【0114】
以上のように、実施例10の構成によれば、運搬機械5の制御部16は、ベッセル12に荷物が積載されている場合、運搬機械5への燃料の供給が実行不能であるとして、給油設備7への進入を規制することができる。このため、制御部16は、運搬機械5の給油設備7への進入を規制することができるため、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。また、運搬機械5が独立して進入規制制御を行うことができるため、構成を簡易なものとすることができる。さらに、運搬機械5は、荷物を積載した状態で給油設備7に進入することがないため、荷物の落下による給油設備7への損傷を抑制することができる。
【0115】
なお、実施例1から10の構成では、運搬機械5として、エンジンおよびモータを動力源とする運搬機械5に適用して説明したが、この構成に限らず、エンジンのみを動力源とする運搬機械5に適用してもよいし、エンジンを用いて駆動するモータのみを動力源とする運搬機械5に適用してもよい。
【0116】
また、実施例1から10の構成では、燃料計52を用いて、運搬機械5に燃料を供給するか否かを判定したが、この構成に限らず、燃料計52に代えて、運搬機械5の運転状況を管理する管理コントローラ41を用いて、運搬機械5に燃料を供給するか否かを判定してもよい。具体的に、管理コントローラ41は、運搬機械5の運転状況として、運搬機械5が前回燃料を供給してから現在までの経過時間を管理する。そして、管理コントローラ41は、経過時間が予め設定された設定時間を超えた場合、運搬機械5に燃料を供給すると判定する一方で、経過時間が予め設定された設定時間を超えない場合、運搬機械5に燃料を供給しないと判定する。この構成においても、管理コントローラ41は、運搬機械5に燃料を供給するか否かを判定できる。
【0117】
また、実施例1から8の燃料の給油システムにおいて、各構成を適宜組み合わせてもよく、同様に、実施例9および10の運搬機械において、各構成を適宜組み合わせてもよい。例えば、実施例1に記載の報知装置105と、実施例3のゲート装置125とを組み合わせた燃料の給油システムとしてもよい。
【符号の説明】
【0118】
1 荷物運搬システム
5 運搬機械
7 給油設備
8 中央管理制御設備
11 車両本体
12 ベッセル
14 通信部
15 位置検出部
16 制御部
17 駆動輪
18 積荷場
19 排土場
31 燃料供給装置
32 通信部
33 制御部
41 管理コントローラ
42 通信部
50 給油システム
51 ペイロードメータ
52 燃料計
100 給油システム(実施例5)
105 報知装置
110 給油システム(実施例2)
115 報知装置(実施例2)
116 通信部(実施例2)
120 給油システム(実施例3)
125 ゲート装置(実施例3)
126 通信部(実施例3)
130 給油システム(実施例6)
131 設備側燃料タンク(実施例6)
132 設備側燃料計(実施例6)
140 給油システム(実施例7)
141 給油車検出センサ(実施例7)
150 給油システム(実施例8)
151 運搬機械検出センサ(実施例8)
L 走行路
L1 走行路
L2 走行路
【技術分野】
【0001】
本発明は、燃料を土木機械に供給する燃料の給油システムおよび土木機械に関するものである。
【背景技術】
【0002】
従来、燃料の給油システムとして、建設機械から送信される燃料の残量の情報を、基地局に報知する建設機械の燃料補給システムが知られている(例えば、特許文献1参照)。この建設機械の燃料補給システムでは、燃料の残量の情報を基地局に報知することで、基地局側で建設機械の燃料の残量を把握することができ、燃料補給の措置をとることができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】国際公開第01/073221号パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の建設機械の燃料補給システムは、建設機械の燃料の残量を把握して、建設機械を円滑に動作させるためのものであることから、建設機械にとって最適な燃料補給所を選定できるものの、建設機械を燃料補給所へ向けて走行させるという着想はない。このため、特許文献1の技術では、鉱山や採石を対象とする土木機械が給油設備へ向けて走行し、給油設備で燃料が供給できなかった場合の影響を回避することは困難である。具体的に、土木機械へ燃料を供給するにあたり、土木機械への燃料の供給が実行できない場合がある。例えば、土木機械の一種であるダンプトラックが荷物を搭載している場合や、燃料を供給する給油設備に燃料がない場合等である。この場合、土木機械が給油設備へ向かって走行したとしても、土木機械へ燃料を供給することができないため、給油設備で給油できなかったときの生産ロスが大きなものとなる。
【0005】
そこで、本発明は、土木機械の生産性を低下させることなく、燃料を供給することができる燃料の給油システムおよび土木機械を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明の燃料の給油システムは、燃料を供給可能な給油設備と、給油設備へ向けて走行可能な土木機械と、燃料の土木機械への供給が実行可能であるか否かの情報である実行可否情報を取得し、取得した実行可否情報に基づく制御を実行可能な制御装置と、を備えた燃料の給油システムであって、制御装置は、土木機械に燃料を供給するにあたり、実行可否情報に基づいて燃料の土木機械への供給が実行不能であると判定すると、土木機械による給油設備への進入を規制するための進入規制制御を実行することを特徴とする。
【0007】
この場合、制御装置は、土木機械を制御して、給油設備へ進入する土木機械の進入動作を規制する進入動作規制制御を、進入規制制御として実行することが好ましい。
【0008】
この場合、各種情報を報知可能な報知装置をさらに備え、制御装置は、報知装置を制御して、土木機械による給油設備への進入を規制する旨の警告情報を、土木機械へ向けて報知する進入規制報知制御を、進入規制制御として実行することが好ましい。
【0009】
この場合、給油設備への土木機械の進入を規制するゲート装置をさらに備え、制御装置は、ゲート装置を制御して、土木機械の給油設備への進入を規制するように動作させるゲート規制動作制御を、進入規制制御として実行することが好ましい。
【0010】
この場合、土木機械は、荷物を積載する積載部を有し、積載部に荷物が積載されているか否かを積載情報として検出可能な荷物検出装置をさらに備え、制御装置は、積載情報を実行可否情報として取得し、積載情報に基づいて積載部に荷物が積載されていると判定すると、燃料の土木機械への供給が実行不能であるとして、進入規制制御を実行することが好ましい。
【0011】
この場合、荷物検出装置は、積載部に積載された荷物の搭載量を検出する搭載量検出装置、土木機械に積載された荷物を撮像する撮像装置、および土木機械の重量を測定する重量測定装置のうち、少なくともいずれか1つを有していることが好ましい。
【0012】
この場合、制御装置は、積載情報から積載部に荷物が積載されていると判定すると、土木機械を荷下ろし場へ向けて配車し、積載情報から積載部に荷物が積載されていないと判定すると、土木機械を給油設備へ向けて配車することが好ましい。
【0013】
この場合、給油設備は、燃料を溜める設備側燃料タンクと、設備側燃料タンクに溜まった燃料の燃料量を設備側燃料量情報として検出可能な設備側燃料量検出手段と、を有し、制御装置は、設備側燃料量情報を実行可否情報として取得し、設備側燃料量情報に基づいて燃料が無いと判定すると、燃料の土木機械への供給が実行不能であるとして、進入規制制御を実行することが好ましい。
【0014】
この場合、給油設備は、土木機械へ燃料を供給する給油車の有無を給油車有無情報として検出可能な給油車有無検出手段を有し、制御装置は、給油車有無情報を実行可否情報として取得し、給油車有無情報に基づいて給油設備に給油車がいないと判定すると、燃料の土木機械への供給が実行不能であるとして、進入規制制御を実行することが好ましい。
【0015】
この場合、給油設備は、土木機械に燃料が供給されることによる給油設備の稼働状況を稼働情報として検出可能な稼働状況検出手段を有し、制御装置は、稼働情報を実行可否情報として取得し、稼働情報から給油設備が満車であると判定すると、燃料の土木機械への供給が実行不能であるとして、進入規制制御を実行することが好ましい。
【0016】
この場合、給油設備は、土木機械に燃料が供給されることによる給油設備の稼働状況を稼働情報として検出可能な稼働状況検出手段を有し、土木機械は、荷物を積載する積載部を有し、積載部に荷物が積載されているか否かを積載情報として検出可能な荷物検出装置をさらに備え、制御装置は、積載情報および稼働情報を実行可否情報として取得し、積載情報に基づいて積載部に荷物が積載されていると判定するか、または稼働情報から給油設備が満車であると判定すると、燃料の土木機械への供給が実行不能であるとして、進入規制制御を実行することが好ましい。
【0017】
本発明の土木機械は、燃料を供給する給油設備へ向けて走行可能な土木機械であって、燃料の供給が実行可能であるか否かの情報である実行可否情報を取得し、取得した実行可否情報に基づく制御を実行可能な制御部を備え、制御部は、燃料を供給するにあたり、実行可否情報に基づいて燃料の供給が実行不能であると判定すると、給油設備への進入を規制するための進入規制制御を実行することを特徴とする。
【0018】
この場合、制御部は、給油設備へ進入する進入動作を規制する進入動作規制制御を、進入規制制御として実行することが好ましい。
【0019】
この場合、情報を報知可能な報知部をさらに備え、制御部は、報知部を制御して、給油設備への進入を規制する旨の警告情報を、操作者へ向けて報知する進入規制報知制御を、進入規制制御として実行することが好ましい。
【0020】
この場合、荷物を積載する積載部と、積載部に荷物が積載されているか否かを積載情報として検出可能な荷物検出手段と、をさらに備え、制御部は、積載情報を実行可否情報として取得し、積載情報から積載部に荷物が積載されていると判定すると、燃料の供給が実行不能であるとして、進入規制制御を実行することが好ましい。
【0021】
この場合、制御部は、積載情報から積載部に荷物が積載されていると判定すると、荷下ろし場へ向けて配車し、積載情報から積載部に荷物が積載されていないと判定すると、給油設備へ向けて配車することが好ましい。
【発明の効果】
【0022】
本発明の燃料の給油システムおよび土木機械によれば、燃料の土木機械への供給が実行不能である場合、土木機械による給油設備への進入を規制することができるため、土木機械が給油設備へ向かって走行することによる生産性の低下を抑制することができる。
【図面の簡単な説明】
【0023】
【図1】図1は、実施例1の燃料の給油システムを適用した荷物運搬システムを模式的に表す概略構成図である。
【図2】図2は、実施例1の運搬機械が走行する走行路の説明図である。
【図3】図3は、実施例1の燃料の給油システムの構成を示すブロック図である。
【図4】図4は、実施例1の燃料の給油システムの制御動作に関するフローチャートである。
【図5】図5は、実施例2の運搬機械が走行する走行路の説明図である。
【図6】図6は、実施例2の燃料の給油システムの構成を示すブロック図である。
【図7】図7は、実施例3の運搬機械が走行する走行路の説明図である。
【図8】図8は、実施例3の燃料の給油システムの構成を示すブロック図である。
【図9】図9は、実施例5の燃料の給油システムの構成を示すブロック図である。
【図10】図10は、実施例6の燃料の給油システムの構成を示すブロック図である。
【図11】図11は、実施例7の燃料の給油システムの構成を示すブロック図である。
【図12】図12は、実施例8の燃料の給油システムの構成を示すブロック図である。
【発明を実施するための形態】
【0024】
以下、添付した図面を参照して、本発明に係る燃料の給油システムおよび土木機械について説明する。なお、以下の実施例によりこの発明が限定されるものではない。また、下記実施例における構成要素には、当業者が置換可能かつ容易なもの、或いは実質的に同一のものが含まれる。なお、実施例1から実施例8までは、土木機械を備えた燃料の給油システムについて説明し、実施例9および実施例10は、土木機械について説明する。
【実施例1】
【0025】
実施例1の燃料の給油システムは、荷物運搬システムに組み込まれている。この荷物運搬システムは、土木機械に搭載された荷物を運搬するシステムである。土木機械としては、建設機械や鉱山機械が適用され、実施例1では、鉱山機械であるダンプトラック等の運搬機械に適用して説明する。
【0026】
<荷物運搬システムの構成>
図1は、実施例1の燃料の給油システムを適用した荷物運搬システムを模式的に表す概略構成図である。図1に示すように、この荷物運搬システム1は、鉱山等で用いられており、運搬機械5と、給油設備7と、これらを管理制御する中央管理制御設備8とを備えている。
【0027】
運搬機械5は、例えば、ダンプトラックであり、荷物を積載して走行することが可能となっている。この運搬機械5は、車両本体11と、ベッセル12と、通信部14と、位置検出部15(図3参照)と、制御部16とを有している。制御部16は、例えば、マイクロコンピュータユニットであり、プロセッサと記憶装置とを含んでいる。
【0028】
車両本体11は、エンジンにおいて燃料を使用して動力を発生させると共に、モータにおいて電力を使用して動力を発生させる車両である。具体的に、車両本体11は、エンジンおよびモータを搭載し、エンジンおよびモータは接続されており、エンジンの動力により電力を発生させ、発生した電力がモータに供給される。これにより、車両本体11は、モータによる動力を駆動輪17に伝達することで走行可能となっている。ベッセル12は、荷物を積載するものであり、車両本体11の上部に配置されている。このベッセル12には、荷物として、採掘された鉱石又は岩若しくは土等の排土が積載される。なお、ベッセル12は、車両本体11に対し着脱可能な構成にしてもよい。
【0029】
通信部14は、制御部16に接続されており、運搬機械5の制御部16と中央管理制御設備8との間で無線通信を行っている。通信部14は、中央管理制御設備8から送信された情報を取得して、制御部16へ向けて出力すると共に、制御部16から出力された情報を取得して、中央制御設備8へ向けて送信している。位置検出部15は、例えば、GPS(Global Positioning System)が用いられており、運搬機械5の位置を認識している。位置検出部15は、制御部16に接続されており、検出した位置情報を制御部16へ出力している。そして、制御部16は、運搬機械5のエンジンなどの各部における動作を制御したり、通信部14を介して取得した位置情報等の情報を中央管理制御設備8へ向けて送信したりしている。
【0030】
図2は、実施例1の運搬機械が走行する走行路の説明図である。上記のように構成された運搬機械5は、荷物を所定の走行路Lに沿って運搬する。図2に示すように、運搬機械5が走行する走行路Lは、例えば、運搬機械5の進路が、走行路Lの幅方向左側となるように構成され、走行路L1と走行路L2とを有している。走行路L1は、荷物を積載する積荷場18と、荷物を下ろす排土場(荷下ろし場)19とを結ぶ走行路であり、積荷場18から排土場19へ向かう往路と、排土場19から積荷場18へ向かう復路とで構成されている。走行路L2は、走行路L1から分岐して給油設備7へ向かう走行路であり、走行路L1から給油設備7へ向かう往路と、給油設備7から走行路L1へ向かう復路とで構成されている。そして、運搬機械5は、走行路L1に沿って、積荷場18と排土場(荷下ろし場)19との間を往復する。また、運搬機械5は、走行することにより燃料が消費され、燃料の残量が少なくなると、走行路L2に沿って、給油設備7に向かって走行する。
【0031】
給油設備7は、燃料供給装置31と、制御部33(図3参照)とを有している。燃料供給装置31は、給油設備7に入ってきた運搬機械5の給油口に図示しない給油ホースが作業者により接続されると、給油口を介して運搬機械5に燃料を供給する。制御部33は、燃料供給装置31の稼働状況の情報である稼働情報を取得し、取得した稼働情報等の情報に基づいて、燃料供給装置31の稼働状況を監視する。
【0032】
中央管理制御設備8は、運搬機械5および給油設備7とは異なる場所に設けられており、運搬機械5の運転状況監視可能に構成されている。中央管理制御設備8は、管理コントローラ41と、通信部42とを有している。通信部42は、運搬機械5と管理コントローラ41との間で無線通信を行っており、位置情報、後述する燃料量情報および実行可否情報等の情報の送受信を行っている。管理コントローラ41は、通信部42を介して取得した情報に基づく制御を行っている。具体的に、管理コントローラ41は、運搬機械5から送信された上記した情報に基づいて、運搬機械5の位置を認識したり、運搬機械5の運転状況を管理したりしている。
【0033】
従って、この荷物運搬システム1では、中央管理制御設備8において、運搬機械5の運転状況が管理され、管理された運搬機械5の運転状況に基づく制御が行われる。例えば、運搬機械5の運転状況としては、運搬機械5へ燃料を供給する状況である。詳細は後述するが、荷物運搬システム1において、中央管理制御設備8が運搬機械5の運転状況から、運搬機械5に燃料を供給する必要があると判定する。すると、中央管理制御設備8は、運搬機械5への燃料の供給を報知する許可情報を、中央管理制御設備8の通信部42および運搬機械5の通信部14を介して、運搬機械5の制御部16に許可情報を送信する。制御部16は、取得した許可情報に基づく制御を実行することで、運搬機械5への燃料の供給を報知できる。以下、図3を参照して、運搬機械5に燃料を供給する燃料の給油システム50について具体的に説明する。なお、運搬機械5への燃料の供給を報知する制御は一例であり、荷物運搬システム1では、この制御の他、走行路Lの路面状況を報知する制御等を行っている。
【0034】
<燃料の給油システムの構成>
図3は、実施例1の燃料の給油システムの構成を示すブロック図である。上記のように構成された荷物運搬システム1には、運搬機械5に対し燃料を供給するための燃料の給油システム(給油システム)50が組み込まれている。
【0035】
給油システム50は、給油設備7に進入した運搬機械5に、燃料供給装置31から燃料を供給するシステムである。図3に示すように、この給油システム50は、上記した運搬機械(土木機械)5と、上記した給油設備7と、上記した中央管理制御設備(制御装置)8とで構成されている。
【0036】
中央管理制御設備8は、燃料を運搬機械5へ供給するか否かの情報である供給情報と、燃料の運搬機械5への供給が実行可能であるか否かの情報である実行可否情報とを取得可能に構成されている。供給情報および実行可否情報は、通信部42を介して、管理コントローラ41に入力される。
【0037】
また、給油システム50には、運搬機械5に荷物が積載されているか否かを検出する荷物検出装置と、運搬機械5の燃料量を検出する燃料計52と、走行路Lの路面状況等の情報を報知する報知装置105とが設けられている。荷物検出装置としては、例えば、運搬機械5に積載された荷物の搭載量を検出するペイロードメータ(搭載量検出装置)51が用いられている。ペイロードメータ51、燃料計52および報知装置105は、運搬機械5に設けられている。
【0038】
ペイロードメータ51は、例えば、車両本体11の駆動輪17を支持するサスペンションの圧力を検出する圧力センサの検出圧力に基づいて、運搬機械5に積載された荷物の搭載量を検出している。このペイロードメータ51は、制御部16に接続されており、検出した搭載量を積載情報として、制御部16へ向けて出力する。積載情報とは、積載部としてのベッセル12に荷物が積載されているか否かを判別するための情報である。制御部16は、入力された積載情報を実行可否情報として、通信部14および通信部42を介して中央管理制御設備8へ向けて送信する。
【0039】
燃料計52は、車両本体11に設けられた燃料タンクに溜まった燃料量を計測している。この燃料計52は、制御部16に接続されており、検出した燃料量を燃料量情報として、制御部16へ向けて出力する。制御部16は、入力された燃料量情報を供給情報として、通信部14および通信部42を介して中央管理制御設備8へ向けて送信する。
【0040】
報知装置105は、例えば、表示モニターであり、運搬機械5の運転室に設けられている。この報知装置105は、制御部16に接続されており、制御部16から入力される情報を、運搬機械5の操作者へ向けて報知可能に表示している。報知装置105に表示される情報は、操作者にとって必要な情報となっている。前記情報は、例えば、ペイロードメータ51により検出された積載情報、燃料計52により検出された燃料量情報、管理コントローラ41から送信された走行路Lの路面状況に関する路面情報、後述する警告情報、後述する許可情報等である。
【0041】
中央管理制御設備8は、通信部42を介して、管理コントローラ41に燃料量情報および積載情報が入力される。管理コントローラ41は、入力された燃料量情報を取得すると、取得した燃料量情報に基づいて、運搬機械5に燃料を供給するか否かを判定する。また、管理コントローラ41は、入力された積載情報を取得すると、取得した積載情報に基づいて、運搬機械5に荷物が積載されているか否かを判定することで、運搬機械5への燃料の給油が実行可能であるか否かを判定する。つまり、管理コントローラ41は、運搬機械5に荷物が積載されていると判定した場合、運搬機械5への燃料の給油は実行不能であると判定する。一方、管理コントローラ41は、運搬機械5に荷物が積載されていないと判定した場合、運搬機械5への燃料の給油は実行可能であると判定する。そして、管理コントローラ41は、運搬機械5への燃料の給油が実行不能であると判定すると、運搬機械5の給油設備7への進入を規制するための進入規制制御を実行する。一方、管理コントローラ41は、運搬機械5への燃料の給油が実行可能であると判定すると、運搬機械5の給油設備7への進入を許容するための進入許容制御を実行する。
【0042】
具体的に、管理コントローラ41は、取得した燃料量情報から運搬機械5に燃料を供給すると判定した場合、取得した積載情報から運搬機械5に荷物が積載されていると判定すると、運搬機械5が給油設備7へ進入することを規制する旨の警告情報を報知装置105に報知させる進入規制報知制御を、進入規制制御として実行する。これにより、報知装置105には警告情報が表示され、運搬機械5の操作者は、報知装置105に表示された警告情報を視認することで、排土場19へ向けて運搬機械5を走行させるという適切な操作を行うことが可能となる。
【0043】
一方で、管理コントローラ41は、取得した燃料量情報から運搬機械5に燃料を供給すると判定した場合、取得した積載情報から運搬機械5に荷物が積載されていないと判定すると、運搬機械5が給油設備7へ進入することを許容する旨の許可情報を報知装置105に報知させる進入許容報知制御を、進入許容制御として実行する。これにより、報知装置105には許可情報が表示され、運搬機械5の操作者は、報知装置105に表示された許可情報を視認することで、給油設備7へ向けて運搬機械5を走行させるという適切な操作を行うことが可能となる。
【0044】
なお、報知装置105は、警告情報および許可情報を表示するが、警告情報としては、例えば、表示モニター上に進入規制を意味する赤色の背景を表示すると共に、「進入禁止」等の警告メッセージを表示してもよい。一方、許可情報としては、例えば、表示モニター上に進入許容を意味する緑色の背景を表示すると共に、「進入許可」等の許可メッセージを表示してもよい。また、この構成に限らず、報知装置105を、複数のランプで構成してもよい。つまり、複数のランプは、少なくとも緑ランプと赤ランプとを有し、警告情報として赤ランプを、許可情報として緑ランプを点灯させてもよい。また、報知装置105は、警告情報および許可情報を表示することで、運搬機械5の操作者へ向けて報知を行ったが、この構成に限らず、例えば、運搬機械5の運転室に設けられたスピーカーを報知装置105として用い、スピーカーから音声ガイドを発することで、運搬機械5の操作者へ向けて報知を行ってもよい。
【0045】
<給油システムの制御動作>
図4は、実施例1の燃料の給油システムの制御動作に関するフローチャートである。図4を参照して、上記のように構成した給油システム50の制御動作について説明する。運搬機械5の制御部16は、ペイロードメータ51から積載情報を取得すると共に、燃料計52から燃料量情報を取得する。制御部16は、取得した積載情報および燃料量情報を、通信部14を介して中央管理制御設備8へ向けて送信する。送信された燃料量情報および積載情報は、中央管理制御設備8の通信部42を介して管理コントローラ41に入力されることで、管理コントローラ41は、燃料量情報および積載情報を取得する。管理コントローラ41は、取得した燃料量情報に基づいて、運搬機械5に燃料を供給するか否かを判定する(ステップS1)。
【0046】
管理コントローラ41は、取得した燃料量情報から、運搬機械5に燃料を供給すると判定する(ステップS1:Yes)と、取得した積載情報に基づいて、運搬機械5のベッセル12に荷物を積載しているか否かを判定する(ステップS2)。一方で、管理コントローラ41は、取得した燃料量情報から、運搬機械5に燃料を供給しないと判定する(ステップS1:No)と、再びステップS1を処理する。
【0047】
管理コントローラ41は、取得した積載情報から、運搬機械5のベッセル12に荷物を積載していると判定する(ステップS2:Yes)と、運搬機械5の操作者へ向けて警告情報を報知する進入規制報知制御を実行する(ステップS6:進入規制制御の実行)。進入規制報知制御が実行されると、管理コントローラ41は、通信部42を介して運搬機械5へ向けて警告情報を送信する。送信された警告情報は、運搬機械5の通信部14で取得され、通信部14は、取得した警告情報を制御部16へ向けて出力する。制御部16は、通信部14から出力された警告情報を取得すると、報知装置105に警告情報を表示する。そして、報知装置105が警告情報を表示すると、運搬機械5の操作者は、給油設備7への進入が規制されていることを把握できるので、運搬機械5を排土場19へ向けて走行させることができる。この後、管理コントローラ41は、ステップS6の実行後、ステップS2へ進み、運搬機械5の荷物が下ろされるまで、ステップS6とステップS2とを繰り返す。
【0048】
管理コントローラ41は、ステップS2において、取得した積載情報から、運搬機械5のベッセル12に荷物を積載していないと判定する(ステップS2:No)と、運搬機械5の操作者へ向けて進入許可情報を報知する進入許容報知制御を実行する(ステップS3:進入許容制御の実行)。進入許容報知制御が実行されると、管理コントローラ41は、通信部42を介して運搬機械5へ向けて許可情報を送信する。送信された許可情報は、運搬機械5の通信部14で取得され、通信部14は、取得した許可情報を制御部16へ向けて出力する。制御部16は、通信部14から出力された許可情報を取得すると、報知装置105に許可情報を表示する。そして、報知装置105が許可情報を表示すると、運搬機械5の操作者は、給油設備7への進入が許容されていことを把握できるので、運搬機械5を給油設備7へ向けて走行させることができる。この後、運搬機械5が給油設備7に進入し、燃料供給装置31による燃料供給が可能な位置に停車すると、運搬機械5の操作者は、運搬機械5のエンジンを停止させる(ステップS4)。そして、エンジンが停止した運搬機械5の給油口に図示しない給油ホースが作業者により接続されると、給油設備7の燃料供給装置31は、運搬機械5へ向けて燃料の供給を行う(ステップS5)。
【0049】
以上のように、実施例1の構成によれば、管理コントローラ41は、運搬機械5に荷物が積載されている場合、運搬機械5への燃料の供給が実行不能であるとして、報知装置105から運搬機械5の操作者へ向けて警告情報を報知することができる。このため、運搬機械5の操作者は、運搬機械5を給油設備7へ向かって走行させずに、排土場19へ向かって走行させることができる。これにより、実施例1の燃料の給油システム50は、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。また、運搬機械5は、荷物を積載した状態で給油設備7に進入することがないため、荷物の落下による給油設備7への損傷を抑制したり、落下した荷物を掃除する手間を省いたりすることができる。落下した荷物の掃除中は、給油設備7における給油が制限されるが、実施例1は、落下した荷物を掃除する手間を省くことができるので、給油設備7における給油の制限を抑制することができ、結果として生産性の低下を抑制できる。また、給油設備7への荷物の落下が回避できるので、落下した荷物により他の運搬機械5が給油設備7に進入できなくなって生産性が低下することを回避することができる。
【0050】
また、実施例1の構成によれば、管理コントローラ41は、ペイロードメータ51によって検出された荷物の積載量に基づいて、運搬機械5に荷物が積載されているか否かを判定することができる。このため、運搬機械5に設けられている既存のペイロードメータ51を有効に活用することができる。
【0051】
なお、実施例1では、報知装置105に警告情報および許可情報を表示したが、警告情報として、「進入禁止」等の警告メッセージと共に、「排土場へ向かって下さい」等の排土作業を促すメッセージを運搬機械5の操作者へ向けて表示してもよい。また、許可情報として、「進入許可」等の許可メッセージと共に、「給油設備へ向かって下さい」等の給油作業を促すメッセージを運搬機械5の操作者へ向けて表示してもよい。
【実施例2】
【0052】
次に、図5および図6を参照して、実施例2の燃料の給油システム110について説明する。図5は、実施例2の運搬機械が走行する走行路の説明図であり、図6は、実施例2の燃料の給油システムの構成を示すブロック図である。なお、実施例2の燃料の給油システム110では、重複した記載を避けるべく、実施例1の燃料の給油システム50と異なる部分についてのみ説明する。実施例1の給油システム50では、報知装置105を運搬機械5の運転室に表示モニターとして設けたが、実施例2の給油システム110では、運搬機械5の外部に報知装置115が設けられている。
【0053】
<燃料の給油システムの構成>
図5に示すように、報知装置115は、走行路L1と走行路L2との分岐路に設けられた信号機や電光掲示板等の警報機であり、運搬機械5を操作する操作者に向けて情報を報知している。情報は、例えば、路面情報、警告情報、許可情報等である。報知装置115は、走行路L1を走行する運搬機械5の上方で、運搬機械5の走行を妨げない位置に設けられている。また、報知装置115は、運搬機械5を操作する操作者へ向けて視認性を高めるべく、走行路L1の延在する方向に対して直交する面を表示面115aとしている。なお、表示面115aは、走行路L1の往路および復路からの視認が可能なように、両面に設けてもよい。
【0054】
この報知装置115は、図6に示すように、中央管理制御設備8の通信部42と通信可能な通信部116を有している。報知装置115は、通信部42および通信部116を介して、中央管理制御設備8の管理コントローラ41によって制御されている。このため、管理コントローラ41は、運搬機械5の操作者にとって必要な情報を報知装置115に表示させることが可能となっている。
【0055】
ここで、報知装置115による情報の報知は、好ましくは、報知装置115の情報を操作者が視認可能な位置まで、運搬機械5が近づいたときに行われる。例えば、管理コントローラ41は、運搬機械5の位置検出部15から送信される位置情報および運搬機械5の固有ID等の識別情報を取得すると共に、報知装置115の位置情報を取得する。そして、管理コントローラ41は、識別情報から報知対象となる運搬機械5を特定すると共に、特定の運搬機械5と報知装置115との距離が所定距離以下となったら情報を報知する。
【0056】
管理コントローラ41は、ペイロードメータ51により検出された積載情報と燃料計52により検出された燃料量情報とを、通信部42を介して運搬機械5から取得する。管理コントローラ41は、取得した燃料量情報から運搬機械5に燃料を供給すると判定した場合に、取得した積載情報から運搬機械5に荷物が積載されていると判定すると、運搬機械5が給油設備7へ進入することを規制する旨の警告情報を報知装置115に報知させる進入規制報知制御を、進入規制制御として実行する。進入規制報知制御が実行され、運搬機械5と報知装置115との距離が所定距離以下となると、管理コントローラ41は、報知装置115に警告情報を表示することで、運搬機械5の操作者へ警告情報を報知する。
【0057】
一方で、管理コントローラ41は、取得した燃料量情報から運搬機械5に燃料を供給すると判定した場合に、取得した積載情報から運搬機械5に荷物が積載されていないと判定すると、運搬機械5が給油設備7へ進入することを許容する旨の許可情報を報知装置115に報知させる進入許容報知制御を、進入許容制御として実行する。進入許容報知制御が実行され、運搬機械5と報知装置115との距離が所定距離以下となると、管理コントローラ41は、報知装置115に許可情報を表示することで、運搬機械5の操作者へ許可情報を報知する。なお、給油システム110の制御動作については、実施例1と同様であるため説明を省略する。
【0058】
ここで、報知装置115として、電光掲示板が適用される場合、報知装置115は、警告情報および許可情報を文章および絵柄で報知してもよい。また、報知装置115として、信号機が適用される場合、信号機は、少なくとも青信号と赤信号とを有し、警告情報として赤信号を、許可情報として青信号を点灯させて報知してもよい。さらに、報知装置115は、報知時において警告音を発生させてもよい。なお、管理コントローラ41は、電光掲示板および信号機等の報知装置115を用いる場合であっても、特定の運搬機械5に対する報知が可能なように、運搬機械5の識別情報を取得して、識別情報から報知対象となる運搬機械5を特定している。
【0059】
以上のように、実施例2の構成においても、管理コントローラ41は、運搬機械5に荷物が積載されている場合、運搬機械5への燃料の供給が実行不能であるとして、報知装置115から運搬機械5の操作者へ向けて警告情報を報知することができる。このため、運搬機械5の操作者は、運搬機械5を給油設備7へ向かって走行させずに、排土場19へ向かって走行させることができる。これにより、実施例2の燃料の給油システム110は、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。
【実施例3】
【0060】
次に、図7および図8を参照して、実施例3の燃料の給油システム120について説明する。図7は、実施例3の運搬機械が走行する走行路の説明図であり、図8は、実施例3の燃料の給油システムの構成を示すブロック図である。なお、実施例3の燃料の給油システム120でも、重複した記載を避けるべく、実施例2の燃料の給油システム110と異なる部分についてのみ説明する。実施例2の給油システム110では、運搬機械5の外部に報知装置115を設けたが、実施例3の給油システム120では、報知装置115に代えて、ゲート装置125が設けられている。
【0061】
<燃料の給油システムの構成>
図7に示すように、ゲート装置125は、走行路L2上に設けられており、運搬機械5の給油設備7への進入を規制可能な構成となっている。このとき、ゲート装置125は、走行路L2において、走行路L1から給油設備7へ向かう往路に配置されている。このゲート装置125は、開閉可能なゲートバー125aを有し、ゲートバー125aを閉動作させることで、給油設備7への進入を規制する一方で、ゲートバー125bを開動作させることで、給油設備7への進入を許容する。
【0062】
このゲート装置125は、図8に示すように、中央管理制御設備8の通信部42と通信可能な通信部126を有している。ゲート装置125は、通信部42および通信部126を介して、中央管理制御設備8の管理コントローラ41によって制御されている。このため、管理コントローラ41は、ゲート装置125の開閉動作を制御することが可能となっている。
【0063】
ここで、ゲート装置125による開閉動作は、好ましくは、運搬機械5がゲート装置125に近づいたときに行われる。例えば、管理コントローラ41は、運搬機械5の位置検出部15から送信される位置情報および運搬機械5の固有ID等である識別情報を取得すると共に、ゲート装置125の位置情報を取得している。そして、管理コントローラ41は、識別情報から報知対象となる運搬機械5を特定すると共に、特定の運搬機械5とゲート装置125との距離が所定距離以下となったら、ゲート装置125による開閉動作を行わせる。
【0064】
管理コントローラ41は、ペイロードメータ51により検出された積載情報と燃料計52により検出された燃料量情報とが、運搬機械5から通信部42を介して入力される。管理コントローラ41は、取得した燃料量情報から運搬機械5に燃料を供給すると判定した場合に、取得した積載情報から運搬機械5に荷物が積載されていると判定すると、ゲート装置125を制御して、運搬機械5が給油設備7へ進入することを規制するゲート規制制御を、進入規制制御として実行する。ゲート規制制御が実行され、運搬機械5とゲート装置125との距離が所定距離以下となると、管理コントローラ41は、ゲート装置125のゲートバー125aを閉動作させる。
【0065】
一方で、管理コントローラ41は、取得した燃料量情報から運搬機械5に燃料を供給すると判定した場合に、取得した積載情報から運搬機械5に荷物が積載されていないと判定すると、ゲート装置125を制御して、運搬機械5が給油設備7へ進入することを許容するゲート許容制御を、進入許容制御として実行する。ゲート許容制御が実行され、運搬機械5とゲート装置125との距離が所定距離以下となると、管理コントローラ41は、ゲート装置125のゲートバー125aを開動作させる。なお、給油システム120の制御動作については、実施例1とほぼ同様であり、図4のステップS3をゲート許容制御とし、図4のステップS6をゲート規制制御とすればよいため説明を省略する。
【0066】
以上のように、実施例3の構成においても、管理コントローラ41は、運搬機械5に荷物が積載されている場合、運搬機械5への燃料の供給が実行不能であるとして、ゲート規制制御を実行することにより、運搬機械5による給油設備7への進入を規制することができる。このため、運搬機械5の操作者は、運搬機械5を給油設備7へ向かって走行させることがないため、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。
【実施例4】
【0067】
次に、実施例4の燃料の給油システムについて説明する。なお、実施例4の燃料の給油システムでも、重複した記載を避けるべく、実施例2および3の燃料の給油システム110,120と異なる部分についてのみ説明する。実施例2および3の給油システム110,120では、中央管理制御設備8により、運搬機械5の外部に設けられた報知装置115またはゲート装置125を制御して進入規制制御を実行したが、実施例4の給油システムでは、中央管理制御設備8に代えて、給油設備7が、報知装置115またはゲート装置125を制御して進入規制制御を実行している。このため、実施例4の燃料の給油システムでは、中央管理制御設備8の構成は必須ではない。以下、ゲート装置125を適用した実施例4の燃料の給油システムについて、図8を参照しながら説明する。
【0068】
<燃料の給油システムの構成>
図8の点線で示すように、ゲート装置125は、給油設備7に接続されており、給油設備7の制御部33は、ゲート装置125を制御可能となっている。このため、制御部33は、ゲート装置125の開閉動作を制御することが可能となっている。また、給油設備7は、通信部32を有している。通信部32は、制御部33に接続され、給油設備7の制御部33と運搬機械5および中央管理制御設備8との間で無線通信を行っており、燃料量情報および実行可否情報等の情報の送受信を行っている。
【0069】
ここで、ゲート装置125による開閉動作は、運搬機械5がゲート装置125に近づいたときに行われる。例えば、給油設備7の制御部33は、運搬機械5の位置検出部15から送信される位置情報を取得すると共に、ゲート装置125の位置情報を取得する。なお、運搬機械5の位置情報は、運搬機械5から直接的に送信されてもよいし、中央管理制御設備8を介して間接的に送信されてもよい。そして、制御部33は、運搬機械5とゲート装置125との距離が所定距離以下となったら、ゲート装置125による開閉動作を行わせる。
【0070】
運搬機械5は、ペイロードメータ51により検出した積載情報および燃料計52により検出した燃料量情報を、通信部14および通信部32を介して給油設備7へ向けて送信する。給油設備7は、通信部32を介して、制御部33に燃料量情報および積載情報が入力される。制御部33は、入力された燃料量情報を取得すると、取得した燃料量情報に基づいて、運搬機械5に燃料を供給するか否かを判定する。また、制御部33は、入力された積載情報を取得すると、取得した積載情報に基づいて、運搬機械5に荷物が積載されているか否かを判定する。
【0071】
つまり、制御部33は、取得した積載情報から、運搬機械5が荷物を積載していると判定すると、ゲート装置125を制御してゲート規制制御を実行する。ゲート規制制御が実行され、運搬機械5とゲート装置125との距離が所定距離以下となると、制御部33は、ゲート装置125のゲートバー125aを閉動作させる。
【0072】
一方で、制御部33は、取得した積載情報から、運搬機械5が荷物を積載していないと判定すると、ゲート装置125を制御してゲート許容制御を実行する。ゲート許容制御が実行され、運搬機械5とゲート装置125との距離が所定距離以下となると、制御部33は、ゲート装置125のゲートバー125aを開動作させる。なお、実施例4の給油システムの制御動作については、実施例3とほぼ同様であるため説明を省略する。
【0073】
以上のように、実施例4の構成においても、制御部33は、運搬機械5に荷物が積載されている場合、運搬機械5への燃料の供給が実行不能であるとして、ゲート規制制御を実行することにより、運搬機械5による給油設備7への進入を規制することができる。このため、運搬機械5の操作者は、運搬機械5を給油設備7へ向かって走行させることがないため、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。なお、ゲート装置125に代えて、報知装置115とする場合も同様である。
【実施例5】
【0074】
次に、図9を参照して、実施例5の燃料の給油システム100について説明する。図9は、実施例5の燃料の給油システムの構成を示すブロック図である。なお、実施例5の燃料の給油システム100でも、重複した記載を避けるべく、実施例1と異なる部分についてのみ説明する。実施例1の給油システム50では、通常の(有人の)運搬機械5を用いたが、実施例5の給油システム100では、無人の運搬機械5を用いている。
【0075】
<燃料の給油システムの構成>
実施例5の燃料の給油システム100は、実施例1と同様に荷物運搬システム1に組み込まれており、上記した運搬機械(土木機械)5と、給油設備7と、上記した中央管理制御設備(制御装置)8とで構成されている。また、実施例5の燃料の給油システム100では、実施例1の報知装置105を廃した構成となっている。
【0076】
無人の運搬機械5は、制御部16に制御されており、制御部16が、取得した走行路Lおよび目標速度などの情報に基づいて、運搬機械5のステアリングおよび駆動輪17などの各部における動作を制御することで、荷物を所定の走行路Lに沿って運搬している。この制御部16は、運搬機械5の通信部14および中央管理制御設備8の通信部42を介して中央管理制御設備8の管理コントローラ41と相互に情報をやり取りすることができるようになっている。このため、無人の運搬機械5は、管理コントローラ41により制御可能となっている。
【0077】
中央管理制御設備8の管理コントローラ41は、ペイロードメータ51により検出された積載情報と燃料計52により検出された燃料量情報とが、運搬機械5から通信部42を介して入力される。管理コントローラ41は、取得した燃料量情報から運搬機械5に燃料を供給すると判定した場合に、取得した積載情報から運搬機械5に荷物が積載されていると判定すると、運搬機械5の給油設備7への進入動作を規制し、運搬機械5を排土場19へ向けて配車する進入動作規制制御を進入規制制御として実行する。これにより、管理コントローラ41は、運搬機械5への燃料供給を阻害する要因となる荷物の積載を早期に解消することが可能となる。その結果、燃料の給油システム100は、運搬機械5の生産性低下を抑制することができる。
【0078】
一方で、管理コントローラ41は、取得した燃料量情報から運搬機械5に燃料を供給すると判定した場合に、取得した積載情報から運搬機械5に荷物が積載されていないと判定すると、運搬機械5による給油設備7への進入を許容し、運搬機械5を給油設備7へ向けて配車する進入動作許容制御を進入許容制御として実行する。これにより、管理コントローラ41は、運搬機械5への燃料供給を円滑に実行することが可能となる。その結果、燃料の給油システム100は、運搬機械5の生産性低下を抑制することができる。
【0079】
<給油システムの制御動作>
ここで、上記のように構成した給油システム100の制御動作について簡単に説明する。なお、実施例5の給油システム100の制御動作は、実施例1の給油システム50の制御動作とほぼ同様の構成となっているため、図4を参照しつつ、異なる部分のみ説明する。
【0080】
ステップS1において、管理コントローラ41が、取得した燃料量情報から運搬機械5に燃料を供給すると判定する(ステップS1:Yes)と、取得した積載情報に基づいて、運搬機械5に荷物が積載されているか否かを判定する(ステップS2)。
【0081】
管理コントローラ41は、取得した積載情報から、運搬機械5が荷物を積載していると判定する(ステップS2:Yes)と、運搬機械5による給油設備7への進入動作を規制する進入動作規制制御を実行する(ステップS6:進入規制制御の実行)。進入動作規制制御が実行されると、管理コントローラ41は、無人の運搬機械5を制御して、運搬機械5を排土場19へ向けて配車する。
【0082】
一方で、管理コントローラ41は、ステップS2において、取得した積載情報から、運搬機械5が荷物を積載していないと判定する(ステップS2:No)と、運搬機械5による給油設備7への進入動作を許容する進入動作許容制御を実行する(ステップS3:進入許容制御の実行)。進入動作許容制御が実行されると、管理コントローラ41は、無人の運搬機械5を制御して、運搬機械5を給油設備7へ向けて配車する。
【0083】
以上のように、実施例5の構成によれば、管理コントローラ41は、運搬機械5に荷物が積載されている場合、運搬機械5への燃料の供給が実行不能であるとして、運搬機械5による給油設備7への進入を規制することができる。このため、管理コントローラ41は、運搬機械5が給油設備7へ進入することによって生じる生産性の低下を抑制することができる。
【0084】
また、実施例5の構成によれば、管理コントローラ41は、運搬機械5に荷物が積載されている場合、運搬機械5を排土場19へ向けて配車することができる。このため、管理コントローラ41は、運搬機械5への燃料の供給を早期に実行可能とすることができ、生産性の向上を図ることができる。
【0085】
なお、実施例1から5の構成では、荷物検出装置として、ペイロードメータ51を適用したが、この構成に限らず、荷物検出装置として、撮像カメラ(撮像装置)を適用してもよい。以下、簡単に説明すると、撮像カメラは、走行路L1に設けられ、走行路L1に沿って走行する運搬機械5のベッセル12を撮像する。この撮像カメラは、中央管理制御設備8へ向けて、撮像した画像を積載情報として送信可能となっている。管理コントローラ41は、入力された積載情報を取得すると、取得した積載情報を画像解析して、運搬機械5に荷物が積載されているか否かを判定する。管理コントローラ41は、取得した積載情報から、運搬機械5が荷物を積載していると判定すると、進入規制制御を実行する。
【0086】
この構成によれば、ペイロードメータ51に代えて、撮像カメラを用いることができるため、運搬機械5に積載された荷物の有無を視認により判定することができる。なお、撮像カメラは、給油設備7に接続し、給油設備7の制御部33へ向けて積載情報を出力してもよい。
【0087】
また、実施例1から5の構成では、荷物検出装置として、ペイロードメータ51を適用したが、この構成に限らず、荷物検出装置として、車重計(重量測定装置)を適用してもよい。以下、簡単に説明すると、車重計は、走行路L1に設けられ、走行路L1に沿って走行する運搬機械5の車重を計測する。この車重計は、中央管理制御設備8へ向けて、計測した車重を積載情報として送信可能となっている。管理コントローラ41は、入力された積載情報を取得すると、取得した積載情報に基づいて、運搬機械5に荷物が積載されているか否かを判定する。管理コントローラ41は、取得した積載情報から、運搬機械5が荷物を積載していると判定すると、進入規制制御を実行する。
【0088】
この構成によれば、ペイロードメータ51に代えて、車重計を用いることができるため、運搬機械5に積載された荷物の有無を車重により判定することができる。なお、車重計は、給油設備7に接続し、給油設備7の制御部33へ向けて積載情報を出力してもよい。
【実施例6】
【0089】
次に、図10を参照して、実施例6の燃料の給油システム130について説明する。図10は、実施例6の燃料の給油システムの構成を示すブロック図である。なお、実施例6の燃料の給油システム130でも、重複した記載を避けるべく、実施例1の燃料の給油システム50と異なる部分についてのみ説明する。実施例1の給油システム50では、荷物検出装置であるペイロードメータ51から検出される積載情報を、実行可否情報として取得したが、実施例6の給油システム130では、給油設備7の燃料の燃料量を実行可否情報として取得している。
【0090】
<燃料の給油システムの構成>
給油設備7は、実施例4と同様の通信部32と、燃料を溜める設備側燃料タンク131と、設備側燃料タンク131の燃料量を検出する設備側燃料計(設備側燃料量検出装置)132とをさらに有している。設備側燃料計132は、給油設備7の制御部33に接続されており、検出した燃料の燃料量を設備側燃料量情報として、制御部33へ向けて出力する。制御部33は、入力された設備側燃料量情報を実行可否情報として、通信部32および通信部42を介して中央管理制御設備8へ向けて送信する。中央管理制御設備8の管理コントローラ41に設備側燃料量情報が入力されると、管理コントローラ41は、給油設備7に燃料がないと判定した場合、運搬機械5への燃料の給油は実行不能であると判定して、進入規制制御を実行する。一方で、管理コントローラ41は、給油設備7に燃料があると判定した場合、運搬機械5への燃料の給油は実行可能であると判定して、進入許容制御を実行する。なお、実施例6の給油システム130の制御動作についても、実施例1とほぼ同様であるため説明を省略する。
【0091】
以上の構成によれば、管理コントローラ41は、給油設備7に燃料がない場合、運搬機械5への燃料の供給が実行不能であるとして、運搬機械5の給油設備7への進入を規制することができるため、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。なお、実施例6の構成は、実施例2から5にも適用可能である。
【実施例7】
【0092】
次に、図11を参照して、実施例7の燃料の給油システム140について説明する。図11は、実施例7の燃料の給油システムの構成を示すブロック図である。なお、実施例7の燃料の給油システム140でも、重複した記載を避けるべく、実施例1の燃料の給油システム50と異なる部分についてのみ説明する。実施例1の給油システム50では、荷物検出装置であるペイロードメータ51から検出される積載情報を、実行可否情報として取得したが、実施例7の給油システム140では、給油設備7に配車された給油車の有無を実行可否情報として取得している。
【0093】
<燃料の給油システムの構成>
給油設備7には、運搬機械5へ燃料を供給する給油車が配車されており、給油車の有無を給油車有無情報として検出可能な給油車検出センサ141と、実施例4と同様の通信部32とが設けられている。給油車検出センサ141は、給油設備7の制御部33に接続されており、検出した給油車の有無を給油車有無情報として、制御部33へ向けて出力する。制御部33は、入力された給油車有無情報を実行可否情報として、通信部32および通信部42を介して中央管理制御設備8へ向けて送信する。中央管理制御設備8の管理コントローラ41に給油車有無情報が入力されると、管理コントローラ41は、給油設備7に給油車がいないと判定した場合、運搬機械5への燃料の給油は実行不能であると判定して、進入規制制御を実行する。一方で、管理コントローラ41は、給油設備7に給油車がいると判定した場合、運搬機械5への燃料の給油は実行可能であると判定して、進入許容制御を実行する。なお、実施例7の給油システム140の制御動作についても、実施例1とほぼ同様であるため説明を省略する。
【0094】
以上の構成によれば、管理コントローラ41は、給油設備7に給油車がいない場合、運搬機械5への燃料の供給が実行不能であるとして、運搬機械5の給油設備7への進入を規制することができるため、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。なお、実施例7の構成は、実施例2から5にも適用可能である。
【実施例8】
【0095】
次に、図12を参照して、実施例8の燃料の給油システム150について説明する。図12は、実施例8の燃料の給油システムの構成を示すブロック図である。なお、実施例8の燃料の給油システム150でも、重複した記載を避けるべく、実施例1の燃料の給油システム50と異なる部分についてのみ説明する。実施例1の給油システム50では、荷物検出装置であるペイロードメータ51から検出される積載情報を、実行可否情報として取得したが、実施例8の給油システム150では、給油設備7の稼働状況を実行可否情報として取得している。
【0096】
<燃料の給油システムの構成>
給油設備7には、燃料を供給するために運搬機械5が配車されており、設備内の稼働状況を稼働情報として検出可能な稼働状況検出装置と、実施例4と同様の通信部32とが設けられている。稼働状況検出装置は、例えば、燃料供給中の運搬機械5の有無を検出可能な運搬機械検出センサ151であり、運搬機械検出センサ151は、給油設備7の制御部33に接続され、運搬機械5の有無から得られる稼働状況を稼働情報として、制御部33へ向けて出力する。制御部33は、入力された稼働情報を実行可否情報として、通信部32および通信部42を介して中央管理制御設備8へ向けて送信する。中央管理制御設備8の管理コントローラ41に稼働情報が入力されると、管理コントローラ41は、給油設備7が満車であると判定した場合、運搬機械5への燃料の給油は実行不能であると判定して、進入規制制御を実行する。一方で、管理コントローラ41は、給油設備7が満車でないと判定した場合、運搬機械5への燃料の給油は実行可能であると判定して、進入許容制御を実行する。なお、実施例8の給油システム150の制御動作についても、実施例1とほぼ同様であるため説明を省略する。
【0097】
以上の構成によれば、管理コントローラ41は、給油設備7が満車である場合、運搬機械5への燃料の供給が実行不能であるとして、運搬機械5の給油設備7への進入を規制することができるため、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。なお、実施例8の構成は、実施例2から5にも適用可能である。
【0098】
なお、実施例8の給油システム150では、稼働状況検出装置として、運搬機械検出センサ151を用いたが、この構成に限らず、運搬機械5に設けられた位置検出部15を用いてもよい。つまり、管理コントローラ41は、運搬機械5から送信される位置情報に基づいて、給油設備7に進入している運搬機械5を検出することができる。
【0099】
なお、実施例1から8の構成では、進入規制制御を、中央管理制御設備8の管理コントローラ41により実行したり、給油設備7の制御部33により実行したりしたが、この構成に限らず、運搬機械5の制御部16によって実行してもよい。つまり、中央管理制御設備8の管理コントローラ41または給油設備7の制御部33を用いずとも、運搬機械5の制御部16によって、進入規制制御を実行することが可能となっている。
【0100】
また、実施例1から8の構成では、給油設備7に入ってきた運搬機械5の給油口には、作業者により給油ホースが接続されたが、燃料供給装置31を自動化し、無人による給油を行ってもよい。
【実施例9】
【0101】
次に、実施例9の土木機械について説明する。なお、実施例9の土木機械は、実施例1の荷物運搬システム1に組み込まれている。なお、土木機械として、実施例1と同様に、ダンプトラック等の運搬機械5に適用して説明する。実施例1では、燃料の給油システム50において進入規制制御を実行したが、実施例9では、運搬機械5が進入規制制御を実行している。
【0102】
<運搬機械の構成>
図示は省略するが、運搬機械5は、実施例1と同様の報知装置(報知部)105を有している。つまり、ペイロードメータ51は、制御部16に接続されており、検出した搭載量を積載情報として、制御部16へ向けて出力する。燃料計52は、制御部16に接続されており、検出した燃料量を燃料量情報として、制御部16へ向けて出力する。報知装置105は、例えば、表示モニターであり、運搬機械5の運転室に設けられ、操作者へ向けて情報を報知している。
【0103】
運搬機械5の制御部16は、取得した燃料量情報から燃料を供給すると判定した場合、取得した積載情報からベッセル12に荷物が積載されていると判定すると、運搬機械5への燃料の給油は実行不能であるとし、給油設備7への進入を規制する旨の警告情報を、報知装置105により報知する進入規制報知制御を実行する。一方で、運搬機械5の制御部16は、取得した燃料量情報から燃料を供給すると判定した場合、取得した積載情報からベッセル12に荷物が積載されていないと判定すると、運搬機械5への燃料の給油は実行可能であるとし、給油設備7への進入を許容する旨の進入許可情報を、報知装置105により報知する進入許容報知制御を実行する。
【0104】
<運搬機械の制御動作>
ここで、上記のように構成した運搬機械5の制御動作について簡単に説明する。なお、実施例9の運搬機械5の制御動作は、実施例1の給油システム50の制御動作とほぼ同様の構成となっているため、図4を参照しながら異なる部分のみ説明する。
【0105】
燃料計52により検出した燃料量情報と、ペイロードメータ51により検出した積載情報とを運搬機械5の制御部16が取得する。すると、制御部16は、取得した燃料量情報に基づいて、運搬機械5に燃料を供給するか否かを判定する(ステップS1)。ステップS1において、制御部16が、取得した燃料量情報から運搬機械5に燃料を供給すると判定する(ステップS1:Yes)と、取得した積載情報に基づいて、運搬機械5に荷物が積載されているか否かを判定する(ステップS2)。
【0106】
制御部16は、取得した積載情報から、ベッセル12に荷物が積載されていると判定する(ステップS2:Yes)と、操作者へ向けて警告情報を報知する進入規制報知制御を実行する(ステップS6:進入規制制御)。進入規制報知制御が実行されると、制御部16は、報知装置105へ警告情報を表示する。一方で、制御部16は、ステップS2において、取得した積載情報から、ベッセル12に荷物が積載されていないと判定する(ステップS2:No)と、操作者へ向けて許可情報を報知する進入許容報知制御を実行する(ステップS3:進入許容制御)。進入許容報知制御が実行されると、制御部16は、報知装置105へ許可情報を表示する。
【0107】
以上のように、実施例9の構成によれば、運搬機械5の制御部16は、ベッセル12に荷物が積載されている場合、運搬機械5への燃料の供給が実行不能であるとして、報知装置105から操作者へ向けて警告情報を報知することができる。このため、運搬機械5の操作者は、運搬機械5を給油設備7へ向かって走行させずに、排土場19へ向かって走行させることができるため、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。また、運搬機械5が独立して進入規制制御を行うことができるため、構成を簡易なものとすることができる。
【実施例10】
【0108】
次に、実施例10の土木機械について説明する。実施例10の土木機械は、実施例1と同様に、ダンプトラック等の運搬機械5に適用し、また、重複した記載を避けるべく、実施例9と異なる部分についてのみ説明する。実施例9の運搬機械5は、進入規制制御を実行可能な通常の(有人の)運搬機械5であったが、実施例10の運搬機械5は、進入規制制御を実行可能な無人の運搬機械5である。
【0109】
<運搬機械の構成>
図示は省略するが、運搬機械5は、実施例1と同様の構成であり、車両本体11と、ベッセル12と、通信部14と、位置検出部15と、制御部16と、ペイロードメータ51と、燃料計52とを有している。ペイロードメータ51は、制御部16に接続されており、検出した搭載量を積載情報として、制御部16へ向けて出力する。燃料計52は、制御部16に接続されており、検出した燃料量を燃料量情報として、制御部16へ向けて出力する。
【0110】
運搬機械5の制御部16は、取得した燃料量情報から燃料を供給すると判定した場合、取得した積載情報からベッセル12に荷物が積載されていると判定すると、運搬機械5への燃料の給油は実行不能であるとし、給油設備7への進入動作を規制し、排土場19へ向けて走行させる進入動作規制制御を実行する。一方で、運搬機械5の制御部16は、取得した燃料量情報から燃料を供給すると判定した場合、取得した積載情報からベッセル12に荷物が積載されていないと判定すると、給油設備7への進入動作を許容し、給油設備7へ向けて走行させる進入動作許容制御を実行する。
【0111】
<運搬機械の制御動作>
ここで、上記のように構成した運搬機械5の制御動作について簡単に説明する。なお、実施例10の運搬機械5の制御動作は、実施例1の給油システム50の制御動作とほぼ同様の構成となっているため、図4を参照しつつ、異なる部分のみ説明する。
【0112】
燃料計52により検出した燃料量情報と、ペイロードメータ51により検出した積載情報とを運搬機械5の制御部16が取得する。すると、制御部16は、取得した燃料量情報に基づいて、運搬機械5に燃料を供給するか否かを判定する(ステップS1)。ステップS1において、制御部16が、取得した燃料量情報から運搬機械5に燃料を供給すると判定する(ステップS1:Yes)と、取得した積載情報に基づいて、運搬機械5に荷物が積載されているか否かを判定する(ステップS2)。
【0113】
制御部16は、取得した積載情報から、ベッセル12に荷物が積載されていると判定する(ステップS2:Yes)と、給油設備7への進入動作を規制する進入動作規制制御を実行する(ステップS6:進入規制制御)。進入動作規制制御を実行すると、制御部16は、車両本体11を排土場19へ向けて走行させる。一方で、制御部16は、ステップS2において、取得した積載情報から、ベッセル12に荷物が積載されていないと判定する(ステップS2:No)と、給油設備7への進入動作を許容する進入動作許容制御を実行する(ステップS3:進入許容制御)。進入動作許容制御を実行すると、制御部16は、車両本体11を給油設備7へ向けて走行させる。
【0114】
以上のように、実施例10の構成によれば、運搬機械5の制御部16は、ベッセル12に荷物が積載されている場合、運搬機械5への燃料の供給が実行不能であるとして、給油設備7への進入を規制することができる。このため、制御部16は、運搬機械5の給油設備7への進入を規制することができるため、運搬機械5が給油設備7へ向かって走行することによる生産性の低下を抑制することができる。また、運搬機械5が独立して進入規制制御を行うことができるため、構成を簡易なものとすることができる。さらに、運搬機械5は、荷物を積載した状態で給油設備7に進入することがないため、荷物の落下による給油設備7への損傷を抑制することができる。
【0115】
なお、実施例1から10の構成では、運搬機械5として、エンジンおよびモータを動力源とする運搬機械5に適用して説明したが、この構成に限らず、エンジンのみを動力源とする運搬機械5に適用してもよいし、エンジンを用いて駆動するモータのみを動力源とする運搬機械5に適用してもよい。
【0116】
また、実施例1から10の構成では、燃料計52を用いて、運搬機械5に燃料を供給するか否かを判定したが、この構成に限らず、燃料計52に代えて、運搬機械5の運転状況を管理する管理コントローラ41を用いて、運搬機械5に燃料を供給するか否かを判定してもよい。具体的に、管理コントローラ41は、運搬機械5の運転状況として、運搬機械5が前回燃料を供給してから現在までの経過時間を管理する。そして、管理コントローラ41は、経過時間が予め設定された設定時間を超えた場合、運搬機械5に燃料を供給すると判定する一方で、経過時間が予め設定された設定時間を超えない場合、運搬機械5に燃料を供給しないと判定する。この構成においても、管理コントローラ41は、運搬機械5に燃料を供給するか否かを判定できる。
【0117】
また、実施例1から8の燃料の給油システムにおいて、各構成を適宜組み合わせてもよく、同様に、実施例9および10の運搬機械において、各構成を適宜組み合わせてもよい。例えば、実施例1に記載の報知装置105と、実施例3のゲート装置125とを組み合わせた燃料の給油システムとしてもよい。
【符号の説明】
【0118】
1 荷物運搬システム
5 運搬機械
7 給油設備
8 中央管理制御設備
11 車両本体
12 ベッセル
14 通信部
15 位置検出部
16 制御部
17 駆動輪
18 積荷場
19 排土場
31 燃料供給装置
32 通信部
33 制御部
41 管理コントローラ
42 通信部
50 給油システム
51 ペイロードメータ
52 燃料計
100 給油システム(実施例5)
105 報知装置
110 給油システム(実施例2)
115 報知装置(実施例2)
116 通信部(実施例2)
120 給油システム(実施例3)
125 ゲート装置(実施例3)
126 通信部(実施例3)
130 給油システム(実施例6)
131 設備側燃料タンク(実施例6)
132 設備側燃料計(実施例6)
140 給油システム(実施例7)
141 給油車検出センサ(実施例7)
150 給油システム(実施例8)
151 運搬機械検出センサ(実施例8)
L 走行路
L1 走行路
L2 走行路
【特許請求の範囲】
【請求項1】
燃料を供給可能な給油設備と、
前記給油設備へ向けて走行可能な土木機械と、
前記燃料の前記土木機械への供給が実行可能であるか否かの情報である実行可否情報を取得し、取得した前記実行可否情報に基づく制御を実行可能な制御装置と、を備えた燃料の給油システムであって、
前記制御装置は、
前記土木機械に前記燃料を供給するにあたり、前記実行可否情報に基づいて前記燃料の前記土木機械への供給が実行不能であると判定すると、前記土木機械による前記給油設備への進入を規制するための進入規制制御を実行することを特徴とする燃料の給油システム。
【請求項2】
前記制御装置は、
前記土木機械を制御して、前記給油設備へ進入する前記土木機械の進入動作を規制する進入動作規制制御を、前記進入規制制御として実行することを特徴とする請求項1に記載の燃料の給油システム。
【請求項3】
情報を報知可能な報知装置をさらに備え、
前記制御装置は、
前記報知装置を制御して、前記土木機械による前記給油設備への進入を規制する旨の警告情報を、前記土木機械へ向けて報知する進入規制報知制御を、前記進入規制制御として実行することを特徴とする請求項1または2に記載の燃料の給油システム。
【請求項4】
前記給油設備への前記土木機械の進入を規制するゲート装置をさらに備え、
前記制御装置は、
前記ゲート装置を制御して、前記土木機械の前記給油設備への進入を規制するように動作させるゲート規制動作制御を、前記進入規制制御として実行することを特徴とする請求項1から3のいずれか1項に記載の燃料の給油システム。
【請求項5】
前記土木機械は、荷物を積載する積載部を有し、
前記積載部に前記荷物が積載されているか否かを積載情報として検出可能な荷物検出装置をさらに備え、
前記制御装置は、
前記積載情報を前記実行可否情報として取得し、前記積載情報に基づいて前記積載部に荷物が積載されていると判定すると、前記燃料の前記土木機械への供給が実行不能であるとして、前記進入規制制御を実行することを特徴とする請求項1から4のいずれか1項に記載の燃料の給油システム。
【請求項6】
前記荷物検出装置は、
前記積載部に積載された荷物の搭載量を検出する搭載量検出装置、前記土木機械に積載された前記荷物を撮像する撮像装置、および前記土木機械の重量を測定する重量測定装置のうち、少なくともいずれか1つを有していることを特徴とする請求項5に記載の燃料の給油システム。
【請求項7】
前記制御装置は、
前記積載情報から前記積載部に荷物が積載されていると判定すると、前記土木機械を荷下ろし場へ向けて配車し、
前記積載情報から前記積載部に荷物が積載されていないと判定すると、前記土木機械を前記給油設備へ向けて配車することを特徴とする請求項5または6に記載の燃料の給油システム。
【請求項8】
前記給油設備は、前記燃料を溜める設備側燃料タンクと、前記設備側燃料タンクに溜まった前記燃料の燃料量を設備側燃料量情報として検出可能な設備側燃料量検出手段と、を有し、
前記制御装置は、
前記設備側燃料量情報を前記実行可否情報として取得し、前記設備側燃料量情報に基づいて前記燃料が無いと判定すると、前記燃料の前記土木機械への供給が実行不能であるとして、前記進入規制制御を実行することを特徴とする請求項1から4のいずれか1項に記載の燃料の給油システム。
【請求項9】
前記給油設備は、前記土木機械へ前記燃料を供給する給油車の有無を給油車有無情報として検出可能な給油車有無検出手段を有し、
前記制御装置は、
前記給油車有無情報を前記実行可否情報として取得し、前記給油車有無情報に基づいて前記給油設備に前記給油車がいないと判定すると、前記燃料の前記土木機械への供給が実行不能であるとして、前記進入規制制御を実行することを特徴とする請求項1から4のいずれか1項に記載の燃料の給油システム。
【請求項10】
前記給油設備は、前記土木機械に前記燃料が供給されることによる前記給油設備の稼働状況を稼働情報として検出可能な稼働状況検出手段を有し、
前記制御装置は、
前記稼働情報を前記実行可否情報として取得し、前記稼働情報から前記給油設備が満車であると判定すると、前記燃料の前記土木機械への供給が実行不能であるとして、前記進入規制制御を実行することを特徴とする請求項1から4のいずれか1項に記載の燃料の給油システム。
【請求項11】
前記給油設備は、前記土木機械に前記燃料が供給されることによる前記給油設備の稼働状況を稼働情報として検出可能な稼働状況検出手段を有し、
前記土木機械は、荷物を積載する積載部を有し、
前記積載部に前記荷物が積載されているか否かを積載情報として検出可能な荷物検出装置をさらに備え、
前記制御装置は、
前記積載情報および前記稼働情報を前記実行可否情報として取得し、前記積載情報に基づいて前記積載部に荷物が積載されていると判定するか、または前記稼働情報から前記給油設備が満車であると判定すると、前記燃料の前記土木機械への供給が実行不能であるとして、前記進入規制制御を実行することを特徴とする請求項1から4のいずれか1項に記載の燃料の給油システム。
【請求項12】
燃料を供給する給油設備へ向けて走行可能な土木機械であって、
前記燃料の供給が実行可能であるか否かの情報である実行可否情報を取得し、取得した前記実行可否情報に基づく制御を実行可能な制御部を備え、
前記制御部は、
前記燃料を供給するにあたり、前記実行可否情報に基づいて前記燃料の供給が実行不能であると判定すると、前記給油設備への進入を規制するための進入規制制御を実行することを特徴とする土木機械。
【請求項13】
前記制御部は、
前記給油設備へ進入する進入動作を規制する進入動作規制制御を、前記進入規制制御として実行することを特徴とする請求項12に記載の土木機械。
【請求項14】
情報を報知可能な報知部をさらに備え、
前記制御部は、
前記報知部を制御して、前記給油設備への進入を規制する旨の警告情報を、操作者へ向けて報知する進入規制報知制御を、前記進入規制制御として実行することを特徴とする請求項12または13に記載の土木機械。
【請求項15】
荷物を積載する積載部と、
前記積載部に前記荷物が積載されているか否かを積載情報として検出可能な荷物検出手段と、をさらに備え、
前記制御部は、
前記積載情報を前記実行可否情報として取得し、前記積載情報から前記積載部に荷物が積載されていると判定すると、前記燃料の供給が実行不能であるとして、前記進入規制制御を実行することを特徴とする請求項12から14のいずれか1項に記載の土木機械。
【請求項16】
前記制御部は、
前記積載情報から前記積載部に荷物が積載されていると判定すると、荷下ろし場へ向けて配車し、
前記積載情報から前記積載部に荷物が積載されていないと判定すると、前記給油設備へ向けて配車することを特徴とする請求項15に記載の土木機械。
【請求項1】
燃料を供給可能な給油設備と、
前記給油設備へ向けて走行可能な土木機械と、
前記燃料の前記土木機械への供給が実行可能であるか否かの情報である実行可否情報を取得し、取得した前記実行可否情報に基づく制御を実行可能な制御装置と、を備えた燃料の給油システムであって、
前記制御装置は、
前記土木機械に前記燃料を供給するにあたり、前記実行可否情報に基づいて前記燃料の前記土木機械への供給が実行不能であると判定すると、前記土木機械による前記給油設備への進入を規制するための進入規制制御を実行することを特徴とする燃料の給油システム。
【請求項2】
前記制御装置は、
前記土木機械を制御して、前記給油設備へ進入する前記土木機械の進入動作を規制する進入動作規制制御を、前記進入規制制御として実行することを特徴とする請求項1に記載の燃料の給油システム。
【請求項3】
情報を報知可能な報知装置をさらに備え、
前記制御装置は、
前記報知装置を制御して、前記土木機械による前記給油設備への進入を規制する旨の警告情報を、前記土木機械へ向けて報知する進入規制報知制御を、前記進入規制制御として実行することを特徴とする請求項1または2に記載の燃料の給油システム。
【請求項4】
前記給油設備への前記土木機械の進入を規制するゲート装置をさらに備え、
前記制御装置は、
前記ゲート装置を制御して、前記土木機械の前記給油設備への進入を規制するように動作させるゲート規制動作制御を、前記進入規制制御として実行することを特徴とする請求項1から3のいずれか1項に記載の燃料の給油システム。
【請求項5】
前記土木機械は、荷物を積載する積載部を有し、
前記積載部に前記荷物が積載されているか否かを積載情報として検出可能な荷物検出装置をさらに備え、
前記制御装置は、
前記積載情報を前記実行可否情報として取得し、前記積載情報に基づいて前記積載部に荷物が積載されていると判定すると、前記燃料の前記土木機械への供給が実行不能であるとして、前記進入規制制御を実行することを特徴とする請求項1から4のいずれか1項に記載の燃料の給油システム。
【請求項6】
前記荷物検出装置は、
前記積載部に積載された荷物の搭載量を検出する搭載量検出装置、前記土木機械に積載された前記荷物を撮像する撮像装置、および前記土木機械の重量を測定する重量測定装置のうち、少なくともいずれか1つを有していることを特徴とする請求項5に記載の燃料の給油システム。
【請求項7】
前記制御装置は、
前記積載情報から前記積載部に荷物が積載されていると判定すると、前記土木機械を荷下ろし場へ向けて配車し、
前記積載情報から前記積載部に荷物が積載されていないと判定すると、前記土木機械を前記給油設備へ向けて配車することを特徴とする請求項5または6に記載の燃料の給油システム。
【請求項8】
前記給油設備は、前記燃料を溜める設備側燃料タンクと、前記設備側燃料タンクに溜まった前記燃料の燃料量を設備側燃料量情報として検出可能な設備側燃料量検出手段と、を有し、
前記制御装置は、
前記設備側燃料量情報を前記実行可否情報として取得し、前記設備側燃料量情報に基づいて前記燃料が無いと判定すると、前記燃料の前記土木機械への供給が実行不能であるとして、前記進入規制制御を実行することを特徴とする請求項1から4のいずれか1項に記載の燃料の給油システム。
【請求項9】
前記給油設備は、前記土木機械へ前記燃料を供給する給油車の有無を給油車有無情報として検出可能な給油車有無検出手段を有し、
前記制御装置は、
前記給油車有無情報を前記実行可否情報として取得し、前記給油車有無情報に基づいて前記給油設備に前記給油車がいないと判定すると、前記燃料の前記土木機械への供給が実行不能であるとして、前記進入規制制御を実行することを特徴とする請求項1から4のいずれか1項に記載の燃料の給油システム。
【請求項10】
前記給油設備は、前記土木機械に前記燃料が供給されることによる前記給油設備の稼働状況を稼働情報として検出可能な稼働状況検出手段を有し、
前記制御装置は、
前記稼働情報を前記実行可否情報として取得し、前記稼働情報から前記給油設備が満車であると判定すると、前記燃料の前記土木機械への供給が実行不能であるとして、前記進入規制制御を実行することを特徴とする請求項1から4のいずれか1項に記載の燃料の給油システム。
【請求項11】
前記給油設備は、前記土木機械に前記燃料が供給されることによる前記給油設備の稼働状況を稼働情報として検出可能な稼働状況検出手段を有し、
前記土木機械は、荷物を積載する積載部を有し、
前記積載部に前記荷物が積載されているか否かを積載情報として検出可能な荷物検出装置をさらに備え、
前記制御装置は、
前記積載情報および前記稼働情報を前記実行可否情報として取得し、前記積載情報に基づいて前記積載部に荷物が積載されていると判定するか、または前記稼働情報から前記給油設備が満車であると判定すると、前記燃料の前記土木機械への供給が実行不能であるとして、前記進入規制制御を実行することを特徴とする請求項1から4のいずれか1項に記載の燃料の給油システム。
【請求項12】
燃料を供給する給油設備へ向けて走行可能な土木機械であって、
前記燃料の供給が実行可能であるか否かの情報である実行可否情報を取得し、取得した前記実行可否情報に基づく制御を実行可能な制御部を備え、
前記制御部は、
前記燃料を供給するにあたり、前記実行可否情報に基づいて前記燃料の供給が実行不能であると判定すると、前記給油設備への進入を規制するための進入規制制御を実行することを特徴とする土木機械。
【請求項13】
前記制御部は、
前記給油設備へ進入する進入動作を規制する進入動作規制制御を、前記進入規制制御として実行することを特徴とする請求項12に記載の土木機械。
【請求項14】
情報を報知可能な報知部をさらに備え、
前記制御部は、
前記報知部を制御して、前記給油設備への進入を規制する旨の警告情報を、操作者へ向けて報知する進入規制報知制御を、前記進入規制制御として実行することを特徴とする請求項12または13に記載の土木機械。
【請求項15】
荷物を積載する積載部と、
前記積載部に前記荷物が積載されているか否かを積載情報として検出可能な荷物検出手段と、をさらに備え、
前記制御部は、
前記積載情報を前記実行可否情報として取得し、前記積載情報から前記積載部に荷物が積載されていると判定すると、前記燃料の供給が実行不能であるとして、前記進入規制制御を実行することを特徴とする請求項12から14のいずれか1項に記載の土木機械。
【請求項16】
前記制御部は、
前記積載情報から前記積載部に荷物が積載されていると判定すると、荷下ろし場へ向けて配車し、
前記積載情報から前記積載部に荷物が積載されていないと判定すると、前記給油設備へ向けて配車することを特徴とする請求項15に記載の土木機械。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−4023(P2013−4023A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−137584(P2011−137584)
【出願日】平成23年6月21日(2011.6.21)
【出願人】(000001236)株式会社小松製作所 (1,686)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月21日(2011.6.21)
【出願人】(000001236)株式会社小松製作所 (1,686)
【Fターム(参考)】
[ Back to top ]