
燃料消費量予測装置、ナビゲーション装置、燃料消費量予測方法
【課題】車両の速度に応じた正味熱効率の変化を考慮して、燃料消費量を正確に予測する。
【解決手段】ナビゲーション装置1は、データ収集処理部21により、車両が走行しているときの速度情報および燃料消費量情報を含む車両情報を車両から取得し、その車両情報に基づいて、データ選定処理部22により車両の燃料消費量を学習する。こうして学習された車両の燃料消費量に基づいて、正味熱効率推定部23により、車両の速度に応じた正味熱効率を推定して記録し、その正味熱効率に基づいて、燃料消費量予測部24により、車両が走行する予定の道路に対する燃料消費量を予測する。
【解決手段】ナビゲーション装置1は、データ収集処理部21により、車両が走行しているときの速度情報および燃料消費量情報を含む車両情報を車両から取得し、その車両情報に基づいて、データ選定処理部22により車両の燃料消費量を学習する。こうして学習された車両の燃料消費量に基づいて、正味熱効率推定部23により、車両の速度に応じた正味熱効率を推定して記録し、その正味熱効率に基づいて、燃料消費量予測部24により、車両が走行する予定の道路に対する燃料消費量を予測する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の燃料消費量を予測する燃料消費量予測装置、ナビゲーション装置および燃料消費量予測方法に関する。
【背景技術】
【0002】
従来、車両の走行パターンを予測し、予測された走行パターンに基づいて各道路リンクの燃料消費量を予測して、燃費最小経路を探索するカーナビゲーション装置が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−107459号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に開示されるカーナビゲーション装置では、車両の走行パターンから各道路リンクの加減速確率を算出すると共に、加減速時に燃料が消費されるか否かを表す地形特徴量を取得し、これらに基づいて燃料消費量の予測値を算出している。ここで、車両のエンジンで発生されたエネルギーは、その全てが車両の動力として使用できるわけではなく、熱、摩擦、排気等による損失を差し引いた分が車両の動力に用いるエネルギーとしてエンジンから車軸に伝達される。この発生エネルギーに対する損失分を差し引いた伝達エネルギーの比率(以下では「正味熱効率」と称する)は、一般的に車両の速度に応じて変化する。しかし、前述のカーナビゲーション装置では、車両の速度に応じた正味熱効率の変化を特に考慮していないため、燃料消費量を正確に予測することが困難である。
【課題を解決するための手段】
【0005】
本発明による燃料消費量予測装置は、車両が走行しているときの速度情報および燃料消費量情報を含む車両情報を車両から取得する車両情報取得手段と、車両情報取得手段により取得された車両情報に基づいて、車両の燃料消費量を学習する学習手段と、学習手段により学習された車両の燃料消費量に基づいて、車両の速度に応じた正味熱効率を推定する正味熱効率推定手段と、正味熱効率推定手段により推定された正味熱効率に基づいて、車両が走行する予定の道路に対する燃料消費量を予測する燃料消費量予測手段とを備える。
本発明によるナビゲーション装置は、上記の燃料消費量予測装置と、燃料消費量予測手段により予測された燃料消費量に基づいて、車両に対する推奨経路を探索する経路探索手段とを備える。
本発明による燃料消費量予測方法は、車両に搭載されたコンピュータによる車両の燃料消費量の予測方法であって、コンピュータにより、車両が走行しているときの速度情報および燃料消費量情報を含む車両情報を車両から取得し、その車両情報に基づいて、車両の燃料消費量を学習し、車両の燃料消費量の学習結果に基づいて、車両の速度に応じた正味熱効率を推定し、その正味熱効率に基づいて、車両が走行する予定の道路に対する燃料消費量を予測する。
【発明の効果】
【0006】
本発明によれば、車両の速度に応じた正味熱効率の変化を考慮して、燃料消費量を正確に予測することができる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態による車載システムの構成を示す図である。
【図2】ナビゲーション装置の構成を示す図である。
【図3】データ収集・選定処理のフローチャートである。
【図4】正味熱効率推定処理のフローチャートである。
【図5】経路探索処理のフローチャートである。
【図6】燃料消費量学習テーブルの例を示す図である。
【図7】正味熱効率テーブルの例を示す図である。
【発明を実施するための形態】
【0008】
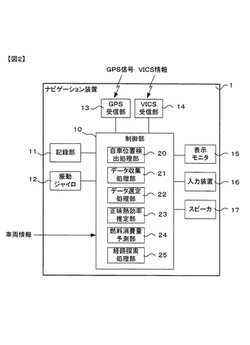
本発明の一実施形態に係る車載システムの構成を図1に示す。この車載システムは、車両100に搭載されており、ナビゲーション装置1、エンジンコントローラ2、エンジン3および車速センサ4を有する。
【0009】
ナビゲーション装置1は、車両100を目的地まで案内するためのナビゲーション機能を有している。ユーザにより車両100の目的地が設定されると、ナビゲーション装置1は、その目的地までの推奨経路を地図データに基づいて探索し、探索した推奨経路に従って車両100を目的地まで案内する。このときユーザは、通常のルート探索と省エネルート探索のいずれかを選択することができる。通常のルート探索では、目的地までの予想所要時間や走行距離に応じて最適な推奨経路を探索する。一方、省エネルート探索では、車両100が走行する予定の道路に対する燃料消費量を推定し、その推定結果に応じて最適な推奨経路を探索する。なお、省エネルート探索における具体的な処理方法については、後で詳しく説明する。
【0010】
エンジンコントローラ2は、エンジン3の回転数等を検出し、その検出結果に基づいて、エンジン3を制御するためのエンジン制御信号を出力する。エンジン3は、エンジンコントローラ2から出力されるエンジン制御信号に基づいて動作し、車両100が走行するための駆動力を発生して車軸に伝える。このとき、車両100に備えられたアクセルペダルの操作によって決定されたアクセル開度に応じて、エンジン3においてスロットルバルブの開閉状態が制御され、エンジン3が吸入する空気量が調節される。この吸入空気量の計測結果等に基づいて、エンジンコントローラ2はエンジン3における燃料噴射量を決定し、エンジン3の燃料噴射装置を制御する。さらにエンジンコントローラ2は、所定期間内でのエンジン3の燃料噴射量を合計することで単位時間当たりの車両100の燃料消費量を算出し、その算出結果を燃料消費量情報として、エンジン回転数情報と共にナビゲーション装置1へ出力する。
【0011】
車速センサ4は、車両100が走行しているときの速度を検出し、その検出結果を示す車両速度情報をナビゲーション装置1へ出力する。たとえば、車両100におけるホイールの回転状態に応じた車速パルスを車両速度情報としてナビゲーション装置1へ出力する。この車両速度情報に基づいて、ナビゲーション装置1において車両100の走行速度が検出される。
【0012】
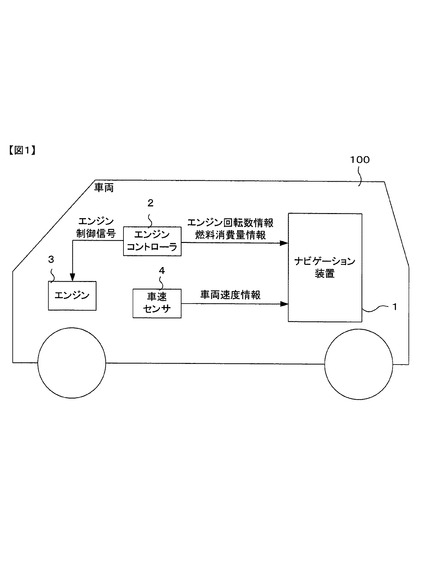
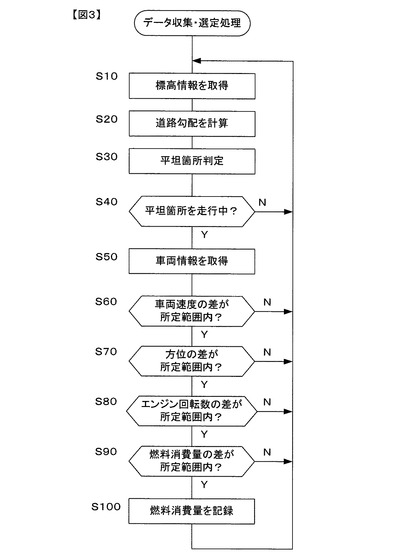
次にナビゲーション装置1の構成について説明する。図2に示すように、ナビゲーション装置1は、制御部10、記録部11、振動ジャイロ12、GPS(Global Positioning System)受信部13、VICS(登録商標)受信部14、表示モニタ15、入力装置16およびスピーカ17を備えている。
【0013】
制御部10は、マイクロプロセッサや各種周辺回路、RAM、ROM等によって構成されており、自車位置検出処理部20、データ収集処理部21、データ選定処理部22、正味熱効率推定部23、燃料消費量予測部24および経路探索処理部25の各部を機能的に有している。制御部10は、記録部11に記録されている制御プログラムや地図データに基づいて、これらの各機能を実現するための処理を実行する。このとき実行される処理の具体的な内容については、後でフローチャートを用いて説明する。
【0014】
図1のエンジンコントローラ2から出力されたエンジン回転数情報および燃料消費量情報と、車速センサ4から出力された車両速度情報とは、ナビゲーション装置1において所定の受信処理が行われた後、制御部10に入力される。図2では、ナビゲーション装置1の制御部10に入力されるこれらの情報をまとめて「車両情報」と表している。
【0015】
記録部11は、制御部10の処理において使用される地図データ等の各種データを記録するための部分であり、たとえばHDD(Hard Disk Drive)やフラッシュメモリなどの不揮発性の記録媒体を用いて構成される。記録部11に記録されているデータは、必要に応じて制御部10の制御により記録部11から読み出される。
【0016】
記録部11に記録された地図データは、経路計算データと、道路データと、背景データとを含む。経路計算データは、目的地までの推奨経路を探索する際などに用いられるデータである。道路データは、道路の形状や種別などを表すデータである。道路データにおいて、各道路は後述するようにノードや形状補間点と呼ばれる点を複数繋げることによって構成されている。背景データは、地図の背景を表すデータである。なお、地図の背景とは、地図上に存在する道路以外の様々な構成物である。たとえば、河川、鉄道、緑地帯、各種構造物などが背景データによって表される。
【0017】
地図データにおいて道路網を構成する各道路の最小単位はリンクと呼ばれている。すなわち、所定の道路区間にそれぞれ対応する複数のリンクによって道路網が構成されており、リンク単位で経路計算データおよび道路データが表現されている。なお、道路データにおいて各リンクの両端には、座標情報や標高情報がそれぞれ設定されたノードと呼ばれる点が設けられている。また、各リンクの途中には形状補間点と呼ばれる点が必要に応じて設けられている。各形状補間点には、ノードと同様に座標情報や標高情報がそれぞれ設定されている。これらの点を順に繋げることにより、道路データにおいて道路の形状が表される。
【0018】
一方、経路計算データには、各道路区間に対応するリンクごとに、自車両が当該道路区間を走行する際の通過所要時間等に応じたリンクコストが設定されている。このリンクコストに基づいて、予め設定された経路探索条件に応じたリンクの組合せを求めることにより、ナビゲーション装置1において通常のルート探索による推奨経路の探索が行われる。たとえば、移動時間の短さを最優先として経路探索を行うような経路探索条件が設定されている場合は、出発地から目的地までの通過所要時間が最小となるリンクの組合せが推奨経路として求められる。
【0019】
振動ジャイロ12は、車両100の向きの変化に応じた角速度を検出するためのセンサである。振動ジャイロ12により検出された角速度は制御部10へ出力される。
【0020】
GPS受信部13は、GPS衛星から送信されるGPS信号を受信して制御部10へ出力する。GPS信号には、GPS衛星の位置と送信時刻に関する情報が含まれている。所定数以上のGPS衛星からGPS信号を受信することにより、GPS信号の受信位置として車両100の現在位置を算出することができる。
【0021】
制御部10の自車位置検出処理部20は、GPS受信部13により受信されたGPS信号と、車速センサ4から出力された車両速度情報と、振動ジャイロ12により検出された角速度に基づいて、車両100の現在位置を算出するための自車位置検出処理を所定時間ごとに実行する。なお、このとき必要に応じて記録部11に記録された地図データに基づいたマップマッチング処理が行われ、車両100の現在位置が道路の位置に合わせて補正される。
【0022】
VICS受信部14は、図示しないVICSセンターからナビゲーション装置1に対して送信されるVICS情報を受信する。このVICS情報をVICS受信部14が受信することにより、渋滞情報を始めとする様々な道路交通情報がナビゲーション装置1において取得される。VICS情報により提供される渋滞情報では、各リンクの道路状況を順調、混雑または渋滞の3種類の道路状況のうちいずれかで表現している。VICS受信部14により受信されたVICS情報は、制御部10に出力され、渋滞情報の表示や推奨経路の探索などに利用される。
【0023】
なお、VICSセンターからナビゲーション装置1へのVICS情報の送信は、主に高速道路上に設置されている電波ビーコンや、主に一般道路上に設置されている光ビーコン、またはFM多重放送によって行われる。電波ビーコンや光ビーコンは、その設置地点付近を通過する車両に対して、電波あるいは光(赤外線)により局所的にVICS情報を送信するものである。これに対して、FM多重放送では比較的広い地域に対してVICS情報を送信することができる。
【0024】
表示モニタ15は、ナビゲーション装置1において様々な画面表示を行うための装置であり、液晶ディスプレイ等を用いて構成される。この表示モニタ15により、地図画面の表示や推奨経路の案内表示などが行われる。表示モニタ15に表示される画面の内容は、制御部10が行う画面表示制御によって決定される。表示モニタ15は、たとえば自車両のダッシュボード上やインストルメントパネル内など、ユーザが見やすいような位置に設置されている。
【0025】
入力装置16は、ナビゲーション装置1を動作させるための様々な入力操作をユーザが行うための装置であり、各種の入力スイッチ類を有している。ユーザは、入力装置16を操作することにより、たとえば、目的地に設定したい施設や地点の名称等を入力したり、推奨経路の探索条件を設定したり、予め登録された登録地の中から目的地を選択したり、表示モニタ15に表示された地図を任意の方向にスクロールしたりすることができる。入力装置16は、操作パネルやリモコンなどによって実現することができる。あるいは、入力装置16を表示モニタ15と一体化されたタッチパネルとしてもよい。
【0026】
スピーカ17は、制御部10の制御により様々な音声情報を出力する。たとえば、推奨経路に従って自車両を目的地まで案内するための経路案内用の音声や、各種の警告音などがスピーカ17から出力される。
【0027】
ナビゲーション装置1の制御部10が実行する処理の内容について以下に説明する。制御部10は、データ収集処理部21、データ選定処理部22、正味熱効率推定部23、燃料消費量予測部24および経路探索処理部25の各部により、図3〜5のフローチャートに示す各処理を実行する。以下では、これらの処理について順に説明する。
【0028】
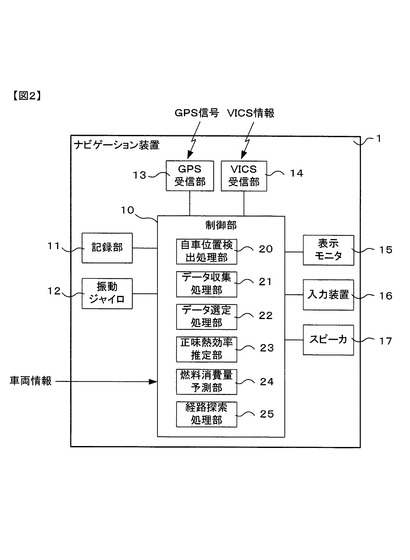
最初に、図3に示すデータ収集・選定処理のフローチャートについて説明する。制御部10は、車両100が走行しているときに、データ収集処理部21およびデータ選定処理部22により、図3に示すデータ収集・選定処理を所定の処理周期ごとに繰り返し実行する。
【0029】
図3のステップS10〜S50では、データ収集処理部21によるデータ収集処理を行う。ステップS10において、データ収集処理部21は、自車位置検出処理部20により検出された車両100の現在位置に基づいて、車両100が現在走行している道路区間の標高情報を取得する。ここでは、記録部11において記録されている地図データから、車両100の現在位置に対応するリンクの両端にある各ノードの標高情報を取得する。なお、車両100の現在位置に対応するリンクに形状補間点が設定されており、車両100の現在位置の前方または後方のいずれか一方または両方に形状補間点が存在する場合は、ノードの標高情報の代わりにこれらの形状補間点の標高情報を取得すればよい。
【0030】
ステップS20において、データ収集処理部21は、ステップS10で取得した標高情報に基づいて、車両100が現在走行している道路区間における道路勾配を計算する。ここでは、ステップS10で取得した各ノードまたは各形状補間点間の標高情報に基づいてこれらの標高差を算出し、その標高差を当該道路区間の距離で除算することにより道路勾配を計算する。なお、車両100が現在走行している道路区間の距離は、標高情報を取得した各ノードまたは各形状補間点間の座標値の差分に基づいて算出することができる。あるいは、当該道路区間の距離情報が地図データにおいて設定されている場合はこれを用いてもよい。
【0031】
ステップS30において、データ収集処理部21は、ステップS20で計算した道路勾配に基づいて、車両100が平坦な道路区間を走行しているか否かを判定するための平坦箇所判定を行う。ここでは、ステップS20で計算した道路勾配の大きさが所定の閾値の範囲内であれば、車両100が平坦な道路区間を走行していると判定し、そうでなければ車両100が平坦な道路区間を走行していないと判定する。たとえば、±0.5%の範囲を平坦である道路勾配の閾値として予め設定しておき、ステップS20で計算した道路勾配の大きさの百分率がこの閾値の範囲内であるか否かによりステップS30の平坦箇所判定を行うことができる。
【0032】
ステップS40において、データ収集処理部21は、ステップS30で行った平坦箇所判定の結果により、車両100が平坦箇所を走行中であるか否かを判定する。車両100が平坦な道路区間を走行しているとステップS30で判定した場合は、車両100が平坦箇所を走行中であるとしてステップS50へ進む。一方、車両100が平坦な道路区間を走行していないとステップS30で判定した場合は、車両100が平坦箇所を走行中ではないとして、次の処理周期まで待機した後にステップS10へ戻る。この場合、今回の処理周期では車両情報は取得されない。
【0033】
ステップS50において、データ収集処理部21は、車両100から出力される車両情報を取得する。ここでは前述のように、エンジンコントローラ2から出力されるエンジン回転数情報および燃料消費量情報と、車速センサ4から出力される車両速度情報とを、車両100からの車両情報として取得する。このようにして、車両100が走行しているときの車両情報を車両100から取得する。さらにこのときデータ収集処理部21は、振動ジャイロ12から角速度の検出結果を取得する。
【0034】
図3のステップS60〜S100では、データ選定処理部22によるデータ選定処理を行う。ステップS60において、データ選定処理部22は、ステップS50でデータ収集処理部21により取得された車両情報に含まれる車両速度情報に基づいて、現在と過去の間の車両100の速度の差が所定範囲内であるか否かを判定する。たとえば、現在の車両速度情報が表す車両100の速度と、現在よりも1秒前に取得した車両速度情報が表す車両100の速度との差分が1km/h以内であれば、車両100の速度差が所定範囲内であると判定してステップS70へ進む。そうでない場合は、車両100の速度差が所定範囲内ではないと判定し、次の処理周期まで待機した後にステップS10へ戻る。この場合、今回の処理周期では燃料消費量は記録されない。
【0035】
ステップS70において、データ選定処理部22は、ステップS50で振動ジャイロ12から取得された角速度の検出結果に基づいて、現在と過去の間の車両100の方位の差が所定範囲内であるか否かを判定する。たとえば、現在の角速度から求められた車両100の方位と、現在よりも1秒前に取得した角速度から求められた車両100の方位との差分が1°以内であれば、車両100の方位差が所定範囲内であると判定してステップS80へ進む。そうでない場合は、車両100の方位差が所定範囲内ではないと判定し、次の処理周期まで待機した後にステップS10へ戻る。この場合にも、今回の処理周期では燃料消費量は記録されない。
【0036】
ステップS80において、データ選定処理部22は、ステップS50でデータ収集処理部21により取得された車両情報に含まれるエンジン回転数情報に基づいて、現在と過去の間のエンジン3の回転数の差が所定範囲内であるか否かを判定する。たとえば、現在のエンジン回転数情報が表すエンジン3の回転数と、現在よりも1秒前に取得したエンジン回転数情報が表すエンジン3の回転数との差分が100rpm以内であれば、エンジン3の回転数差が所定範囲内であると判定してステップS90へ進む。そうでない場合は、エンジン3の回転数差が所定範囲内ではないと判定し、次の処理周期まで待機した後にステップS10へ戻る。この場合にも、今回の処理周期では燃料消費量は記録されない。
【0037】
ステップS90において、データ選定処理部22は、ステップS50でデータ収集処理部21により取得された車両情報に含まれる燃料消費量情報に基づいて、現在と過去の間の車両100の燃料消費量の差が所定範囲内であるか否かを判定する。たとえば、現在の燃料消費量情報が表す車両100の燃料消費量と、現在よりも1秒前に取得した燃料消費量情報が表す車両100の燃料消費量との差分が0.01cc以内であれば、車両100の燃料消費量差が所定範囲内であると判定してステップS100へ進む。そうでない場合は、車両100の燃料消費量差が所定範囲内ではないと判定し、次の処理周期まで待機した後にステップS10へ戻る。この場合にも、今回の処理周期では燃料消費量は記録されない。
【0038】
なお、以上説明したステップS60〜S90の各処理は、必ずしも全てを実行する必要はなく、いずれかを適宜省略してもよい。すなわち、ステップS60〜S90の各処理のうちいずれか少なくとも一つを実行することにより、データ選定処理部22は、ステップS50で取得した車両情報に含まれる燃料消費量情報から、ステップS100で記録対象とする燃料消費量情報を選定することができる。
【0039】
ステップS100において、データ選定処理部22は、ステップS50でデータ収集処理部21により取得された車両情報に基づいて、車両100の燃料消費量を記録部11に記録する。すなわち、ステップS50で取得された車両情報に含まれる燃料消費量情報が表す車両100の燃料消費量を記録部11に記録する。
【0040】
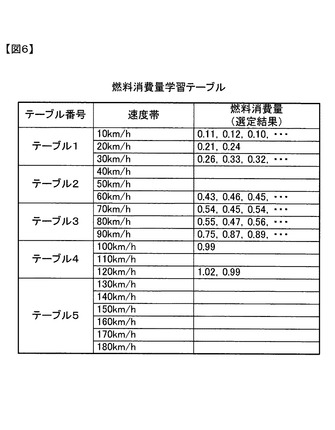
ここで、ステップS100で燃料消費量を記録部11に記録するときの記録方法の例について説明する。図6は、燃料消費量の記録に用いられる燃料消費量学習テーブルの例を示している。この燃料消費量学習テーブルでは、車両100の走行速度を10km/h間隔で複数の速度帯に分け、その速度帯ごとに、ステップS60〜S90の各処理によって選定された燃料消費量の値が分類して記録されている。なお、図6において燃料消費量が空欄の部分は、その速度帯の燃料消費量がまだ記録されていないことを表している。図6のような燃料消費量学習テーブルは、たとえばリングバッファを用いて実現することができる。
【0041】
さらに図6に示す燃料消費量学習テーブルでは、複数の速度帯をまとめて一つのグループとしてグループ分けされており、各グループに対して個別のテーブル番号が割り当てられている。たとえば、10km/h、20km/hおよび30km/hの各速度帯によって構成されるグループには、テーブル番号として「テーブル1」が設定されている。同様に、図6に示す各速度帯のグループに対して、その速度の値が小さいものから順に、「テーブル2」、「テーブル3」、「テーブル4」および「テーブル5」の各テーブル番号がそれぞれ設定されている。
【0042】
図3のステップS100では、ステップS50で取得された車両情報に含まれる車両速度情報に基づいて、以上説明したような燃料消費量学習テーブルの該当する速度帯の欄に燃料消費量が記録される。こうした燃料消費量学習テーブルを記録部11において記録しておくことにより、ナビゲーション装置1は車両100が走行しているときの燃料消費量を学習することができる。なお、図6に示した燃料消費量学習テーブルのフォーマットは一例であるため、これ以外のフォーマットによる燃料消費量学習テーブルを用いて燃料消費量を記録部11に記録してもよい。
【0043】
ステップS100を実行したら、データ選定処理部22は、次の処理周期まで待機した後にステップS10へ戻る。以上説明したようにして、図3のフローチャートに示すデータ収集・選定処理が実行される。
【0044】
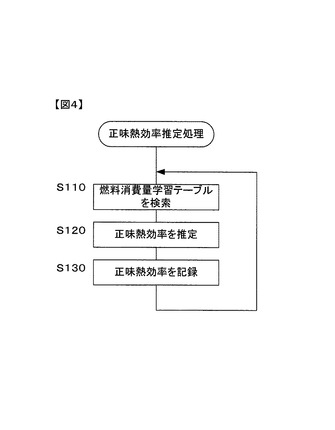
次に、図4に示す正味熱効率推定処理のフローチャートについて説明する。制御部10は、正味熱効率推定部23により、図4に示す正味熱効率推定処理を所定の処理周期ごとに繰り返し実行する。
【0045】
ステップS110において、正味熱効率推定部23は、記録部11に記録されている燃料消費量学習テーブルから、図3のステップS100で記録された燃料消費量の学習データ量が所定の閾値を超えたテーブルを検索する。ここでは、前述のような燃料消費量学習テーブルにおける速度帯を複数のグループに分け、そのグループ単位で、前回の処理時と比べた燃料消費量の学習データの増加量が所定の閾値を超えたものを検索対象として求める。すなわち、図6に例示した燃料消費量学習テーブルでは、「テーブル1」〜「テーブル5」の各テーブル番号に対応するグループ単位で、所定数以上の燃料消費量が新たに記録されたものを検索する。
【0046】
ステップS120において、正味熱効率推定部23は、ステップS110で検索したグループについて、車両100の速度に応じた正味熱効率を推定する。ここでは、検索されたグループに属する各速度帯に対して新たな学習データとして記録された各燃料消費量に基づいて、予め定められた燃料消費量と正味熱効率の関係式を用いて、グループごとの正味熱効率の推定値を算出する。たとえば、各燃料消費量を入力値とする重回帰分析を行うことにより、正味熱効率の推定値を算出することができる。
【0047】
ステップS130において、正味熱効率推定部23は、ステップS120による正味熱効率の推定結果を記録部11に記録する。ここでは、ステップS120で正味熱効率の推定値を算出したグループごとに分類して、その推定値を記録部11に記録する。なお、当該グループに対して既に推定値が記録されている場合は、その推定値を新たに算出された推定値で更新する。
【0048】
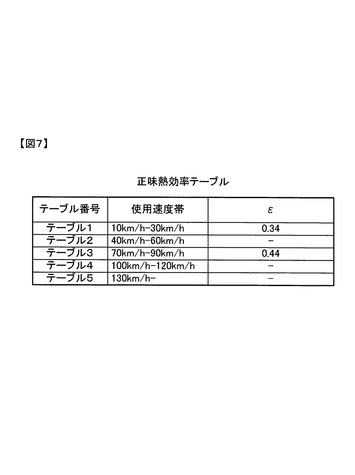
図7は、正味熱効率の推定結果の記録に用いられる正味熱効率テーブルの例を示している。この正味熱効率テーブルでは、図6の燃料消費量学習テーブルにおいて設定されている「テーブル1」〜「テーブル5」の各テーブル番号のグループに対して、算出された正味熱効率εの推定値と、その推定値の使用速度帯とがそれぞれ記録されている。なお、図7において「−」が表示されている部分は、そのグループに対する正味熱効率εの推定値がまだ算出されていないことを表している。
【0049】
図4のステップS130では、以上説明したような正味熱効率テーブルの該当するグループの欄に算出された正味熱効率εの推定値が記録される。なお、図7に示した正味熱効率テーブルのフォーマットは一例であるため、これ以外のフォーマットによる正味熱効率テーブルを用いて正味熱効率εの推定値を記録部11に記録してもよい。
【0050】
ステップS130を実行したら、正味熱効率推定部23は、次の処理周期まで待機した後にステップS110へ戻る。以上説明したようにして、図4のフローチャートに示す正味熱効率推定処理が実行される。
【0051】
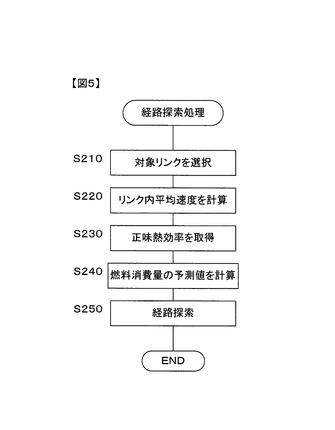
続いて、図5に示す経路探索処理のフローチャートについて説明する。制御部10は、ユーザの操作により目的地が設定され、その目的地までの省エネルート探索の要求があったときに、燃料消費量予測部24および経路探索処理部25により、図5に示す経路探索処理を実行する。
【0052】
図5のステップS210〜S240では、燃料消費量予測部24による燃料消費量予測処理を行う。ステップS210において、燃料消費量予測部24は、燃料消費量の予測を行う対象リンクを選択する。ここでは、たとえば車両100の現在位置から目的地までの間に存在する各メッシュ内のリンクを対象リンクとして選択する。なお、記録部11に記録されている地図データには、メッシュと呼ばれる区画が所定距離ごとに予め設定されており、メッシュ単位で地図データが管理されている。
【0053】
ステップS220において、燃料消費量予測部24は、ステップS210で選択した各対象リンクについて、そのリンク内の平均速度を計算する。ここでは、地図データにおいて記録されている各対象リンクの距離やリンク旅行時間の情報に基づいて、各対象リンク内の平均速度を算出することができる。さらにこのとき、VICS受信部14により受信されたVICS情報や、地図データと共に記録部11に記録されている統計交通情報において渋滞情報が設定されている対象リンクについては、その渋滞情報を加味して平均速度を計算することが好ましい。
【0054】
ステップS230において、燃料消費量予測部24は、ステップS220で計算した各対象リンク内の平均速度に基づいて、各対象リンクに対する正味熱効率を取得する。ここでは、ステップS220で算出された各対象リンク内の平均速度が図7に例示した正味熱効率テーブルにおいてどの使用速度帯に対応するかを判断し、その使用速度帯に対して記録されている正味熱効率εの推定値を記録部11から読み取る。こうした処理を各対象リンクについてそれぞれ行うことにより、各対象リンクに対する正味熱効率を取得することができる。
【0055】
ステップS240において、燃料消費量予測部24は、ステップS230で各対象リンクに対して取得した正味熱効率に基づいて、各対象リンクの燃料消費量の予測値を計算する。ここでは、以下の式(1)によって表される予測モデルを用いて、各対象リンクの正味熱効率εの推定値に対応する燃料消費量Qの予測値(単位:cc)を対象リンクごとに算出する。
【0056】
【数1】

・・・(1)
【0057】
上記の式(1)において、F(単位:cc)は基礎燃料消費量を表しており、下記の式(2)により算出される。ηは伝達効率を表しており、車両100のトランスミッション構造等に応じて予め設定されている定数である。H(単位:J/cc)は燃料1cc当たりの仕事当量を表しており、燃料の種類等に応じて予め設定されている定数である。Rf、Ri、Ra、Rb(単位:kg・m2/s2)は摩擦抵抗、勾配抵抗、空気抵抗、加速抵抗をそれぞれ表しており、下記の式(3)〜(6)によりそれぞれ算出される。
【0058】
【数2】
・・・(2)
【0059】
上記の式(2)において、Filde(単位:cc/s)は単位時間当たりの燃料消費量を表しており、予め設定されている定数である。t(単位:s)はリンク旅行時間を表しており、前述のステップS220で計算される各対象リンクのリンク内平均速度とリンク距離に応じて対象リンクごとに決定される。Fcutは各対象リンク内での燃料カットの割合を表しており、対象リンクごとに設定される。たとえば、各対象リンクの渋滞状況や、地図データにおいて各対象リンクの両端に存在する交差点の種類等に基づいて、各対象リンクにおける車両100の停止時間の割合を求め、これに応じて対象リンクごとにFcutの値を設定することができる。
【0060】
【数3】
・・・(3)
【0061】
上記の式(3)において、μは摩擦抵抗係数を表しており、予め設定されている定数である。M(単位:kg)は車両100の重量を表しており、予め設定されている定数である。g(単位:m/s2)は重力加速度を表しており、予め設定されている定数である。l(単位:m)は各対象リンクのリンク長を表しており、地図データにおいて記録されているリンク距離情報に基づいて対象リンクごとに設定される。
【0062】
【数4】
・・・(4)
【0063】
上記の式(4)において、Mとgは式(3)と同じく、車両100の重量と重力加速度をそれぞれ表している。h(単位:m)は各対象リンクの高低差を表しており、対象リンクごとに設定される。たとえば、前述の図3においてステップS20で説明した道路勾配の計算処理における標高差と同様に、各対象リンクの両端に位置する各ノードの標高情報を取得してこれらの差分を算出することで、対象リンクごとにhの値を設定することができる。
【0064】
【数5】
・・・(5)
【0065】
上記の式(5)において、ρ(単位:kg/m3)は空気密度を表しており、予め設定されている定数である。S(単位:m2)は車両100の前面投影面積を表しており、予め設定されている定数である。Cdは空気抵抗係数を表しており、予め設定されている定数である。Vs(単位:m/s)は各対象リンクのリンク速度を表しており、前述のステップS220で計算される各対象リンクのリンク内平均速度と同じである。lは式(3)と同じく、各対象リンクのリンク長を表している。
【0066】
【数6】
・・・(6)
【0067】
上記の式(5)において、Mは式(3)、(4)と同じく、車両100の重量を表している。m(単位:kg)は車両100の回転部分相当質量を表しており、予め設定されている定数である。Ve(単位:m/s)は各対象リンクの次のリンクにおけるリンク速度を表しており、前述のVsと同じく、ステップS220で当該リンクに対して計算されるリンク内平均速度と同じである。Vsは式(5)と同じく、各対象リンクのリンク速度を表している。
【0068】
ステップ240では、以上説明したような予測モデルを用いて、正味熱効率εの推定値に対応する燃料消費量Qの予測値が算出される。こうして燃料消費量の予測値を各対象リンクについて算出することで、燃料消費量予測部24は車両100がこれから走行する予定の道路に対する燃料消費量を予測する。
【0069】
ステップS250において、経路探索処理部25は、ステップS240で計算された各対象リンクの燃料消費量の予測値に基づいて、車両100の現在位置から設定された目的地までの経路探索を行う。ここでは、車両100の現在位置を出発地として、そこから目的地までの間で燃料消費量の予測値が最小となるリンクの組み合わせをダイクストラ法等の周知の手法を用いて探索し、探索されたリンクの組み合わせを推奨経路に設定する。こうして経路探索処理部25が経路探索を行うことにより、ナビゲーション装置1において省エネルート探索が実現される。
【0070】
ステップS250を実行したら、制御部10は探索結果として得られた推奨経路を表示モニタ15に表示し、図5のフローチャートを終了する。以上説明したようにして、図5のフローチャートに示す経路探索処理が実行される。
【0071】
以上説明した実施の形態によれば、次のような作用効果を奏することができる。
【0072】
(1)ナビゲーション装置1は、データ収集処理部21により、車両100が走行しているときの速度情報および燃料消費量情報を含む車両情報を車両100から取得し(ステップS50)、その車両情報に基づいて、データ選定処理部22により、車両100の燃料消費量を学習する(ステップS100)。こうして学習された車両100の燃料消費量に基づいて、正味熱効率推定部23により、車両100の速度に応じた正味熱効率を推定して記録し(ステップS120、S130)、その正味熱効率に基づいて、燃料消費量予測部24により、車両100が走行する予定の道路に対する燃料消費量を予測する(ステップS240)。このようにしたので、車両100の速度に応じた正味熱効率の変化を考慮して、燃料消費量を正確に予測することができる。
【0073】
(2)データ収集処理部21は、ステップS100において、ステップS50で取得した車両情報に基づいて車両100の燃料消費量を速度帯ごとに分類した図6のような燃料消費量学習テーブルを記録部11に記録することにより、車両100の燃料消費量を学習する。正味熱効率推定部23は、ステップS120において、この燃料消費量学習テーブルに基づいて、車両100の速度に応じた正味熱効率を推定する。このようにしたので、車両100の速度に応じた正味熱効率を確実かつ容易に推定することができる。
【0074】
(3)燃料消費量学習テーブルは、図6に示すように複数の速度帯をまとめて一つのグループとしてグループ分けされている。正味熱効率推定部23は、ステップS120において、この燃料消費量学習テーブルにおいて所定数以上の燃料消費量が記録されたグループについて、正味熱効率を推定する。このようにしたので、車両100の速度に応じた正味熱効率の推定を適切なタイミングで行うことができる。
【0075】
(4)データ収集処理部21は、車両100が平坦な道路区間を走行しているか否かを判定し(ステップS40)、平坦な道路区間を走行していないと判定された場合、ステップS50において車両情報を取得しないようにした。これにより、車両100が平坦な道路区間を走行していないときに出力された正味熱効率の推定に用いるのに適切ではない車両情報を取得対象から除外することができる。そのため、正味熱効率推定部23により正味熱効率を正確に推定することができる。
【0076】
(5)ナビゲーション装置1は、データ選定処理部22がデータ選定処理を行うことにより、ステップS50でデータ収集処理部21によって取得された車両情報に含まれる燃料消費量情報から処理対象とする燃料消費量情報を選定する(ステップS60〜S90)。正味熱効率推定部23は、このデータ選定処理によって選定された燃料消費量情報に基づいて、ステップS120において正味熱効率を推定する。このようにしたので、正味熱効率の推定に用いるのに適切な燃料消費量情報を選定し、正確な正味熱効率の推定値を得ることができる。
【0077】
(6)データ選定処理部22は、ステップS60〜S90において、車速センサ4からの速度情報が表す車両100の速度、自車位置検出処理部20により検出された車両100の方位、車両情報に含まれるエンジン回転数情報が表す車両100のエンジン回転数、および燃料消費量情報が表す車両100の燃料消費量のいずれか少なくとも一つにおける現在の値と過去の値との差分に基づいて、処理対象とする燃料消費量情報を選定する。このようにしたので、車両100の状態変化を考慮して、正味熱効率の推定に用いるのに適切な燃料消費量情報を確実に選定することができる。
【0078】
(7)ナビゲーション装置1は、経路探索処理部25により、ステップS240で燃料消費量予測部24によって予測された燃料消費量に基づいて、車両100に対する推奨経路を探索する(ステップS250)。このようにしたので、目的地までの燃料消費量が最も少ない経路を探索して推奨経路とする省エネルート探索を実現することができる。
【0079】
(8)燃料消費量予測部24は、推奨経路の探索に用いる対象リンクを選択し(ステップS210)、その対象リンク内の平均速度を計算する(ステップS220)。そして、ステップS120、S130で正味熱効率推定部23によって推定され記録された正味熱効率のうち、ステップS220で計算された対象リンク内の平均速度に応じた正味熱効率を取得し(ステップS230)、その正味熱効率に基づいて、対象リンクに対する燃料消費量をステップS240において予測する。このようにしたので、車両100の速度に応じて推定された正味熱効率のうち対象リンクにとって最適な正味熱効率を用いて、燃料消費量の予測を行うことができる。
【0080】
なお、上記実施の形態では、燃料消費量予測部24によって予測された各対象リンクの燃料消費量を省エネルート探索に利用するナビゲーション装置1での適用例を説明したが、ナビゲーション装置以外の車載装置や燃料消費量予測装置において本発明を適用してもよい。前述したような各処理を行うことにより、処理対象とする道路を車両が走行したときの燃料消費量を予測できるものであれば、どのような装置についても本発明を適用可能である。
【0081】
以上説明した実施の形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されるものではない。
【符号の説明】
【0082】
1:ナビゲーション装置、2:エンジンコントローラ、3:エンジン、4:車速センサ、
10:制御部、11:記録部、12:振動ジャイロ、13:GPS受信部、
14:VICS受信部、15:表示モニタ、16:入力装置、17:スピーカ、
20:自車位置検出処理部、21:データ収集処理部、22:データ選定処理部、
23:正味熱効率推定部、24:燃料消費量予測部、25:経路探索処理部、
100:車両
【技術分野】
【0001】
本発明は、車両の燃料消費量を予測する燃料消費量予測装置、ナビゲーション装置および燃料消費量予測方法に関する。
【背景技術】
【0002】
従来、車両の走行パターンを予測し、予測された走行パターンに基づいて各道路リンクの燃料消費量を予測して、燃費最小経路を探索するカーナビゲーション装置が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−107459号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に開示されるカーナビゲーション装置では、車両の走行パターンから各道路リンクの加減速確率を算出すると共に、加減速時に燃料が消費されるか否かを表す地形特徴量を取得し、これらに基づいて燃料消費量の予測値を算出している。ここで、車両のエンジンで発生されたエネルギーは、その全てが車両の動力として使用できるわけではなく、熱、摩擦、排気等による損失を差し引いた分が車両の動力に用いるエネルギーとしてエンジンから車軸に伝達される。この発生エネルギーに対する損失分を差し引いた伝達エネルギーの比率(以下では「正味熱効率」と称する)は、一般的に車両の速度に応じて変化する。しかし、前述のカーナビゲーション装置では、車両の速度に応じた正味熱効率の変化を特に考慮していないため、燃料消費量を正確に予測することが困難である。
【課題を解決するための手段】
【0005】
本発明による燃料消費量予測装置は、車両が走行しているときの速度情報および燃料消費量情報を含む車両情報を車両から取得する車両情報取得手段と、車両情報取得手段により取得された車両情報に基づいて、車両の燃料消費量を学習する学習手段と、学習手段により学習された車両の燃料消費量に基づいて、車両の速度に応じた正味熱効率を推定する正味熱効率推定手段と、正味熱効率推定手段により推定された正味熱効率に基づいて、車両が走行する予定の道路に対する燃料消費量を予測する燃料消費量予測手段とを備える。
本発明によるナビゲーション装置は、上記の燃料消費量予測装置と、燃料消費量予測手段により予測された燃料消費量に基づいて、車両に対する推奨経路を探索する経路探索手段とを備える。
本発明による燃料消費量予測方法は、車両に搭載されたコンピュータによる車両の燃料消費量の予測方法であって、コンピュータにより、車両が走行しているときの速度情報および燃料消費量情報を含む車両情報を車両から取得し、その車両情報に基づいて、車両の燃料消費量を学習し、車両の燃料消費量の学習結果に基づいて、車両の速度に応じた正味熱効率を推定し、その正味熱効率に基づいて、車両が走行する予定の道路に対する燃料消費量を予測する。
【発明の効果】
【0006】
本発明によれば、車両の速度に応じた正味熱効率の変化を考慮して、燃料消費量を正確に予測することができる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態による車載システムの構成を示す図である。
【図2】ナビゲーション装置の構成を示す図である。
【図3】データ収集・選定処理のフローチャートである。
【図4】正味熱効率推定処理のフローチャートである。
【図5】経路探索処理のフローチャートである。
【図6】燃料消費量学習テーブルの例を示す図である。
【図7】正味熱効率テーブルの例を示す図である。
【発明を実施するための形態】
【0008】
本発明の一実施形態に係る車載システムの構成を図1に示す。この車載システムは、車両100に搭載されており、ナビゲーション装置1、エンジンコントローラ2、エンジン3および車速センサ4を有する。
【0009】
ナビゲーション装置1は、車両100を目的地まで案内するためのナビゲーション機能を有している。ユーザにより車両100の目的地が設定されると、ナビゲーション装置1は、その目的地までの推奨経路を地図データに基づいて探索し、探索した推奨経路に従って車両100を目的地まで案内する。このときユーザは、通常のルート探索と省エネルート探索のいずれかを選択することができる。通常のルート探索では、目的地までの予想所要時間や走行距離に応じて最適な推奨経路を探索する。一方、省エネルート探索では、車両100が走行する予定の道路に対する燃料消費量を推定し、その推定結果に応じて最適な推奨経路を探索する。なお、省エネルート探索における具体的な処理方法については、後で詳しく説明する。
【0010】
エンジンコントローラ2は、エンジン3の回転数等を検出し、その検出結果に基づいて、エンジン3を制御するためのエンジン制御信号を出力する。エンジン3は、エンジンコントローラ2から出力されるエンジン制御信号に基づいて動作し、車両100が走行するための駆動力を発生して車軸に伝える。このとき、車両100に備えられたアクセルペダルの操作によって決定されたアクセル開度に応じて、エンジン3においてスロットルバルブの開閉状態が制御され、エンジン3が吸入する空気量が調節される。この吸入空気量の計測結果等に基づいて、エンジンコントローラ2はエンジン3における燃料噴射量を決定し、エンジン3の燃料噴射装置を制御する。さらにエンジンコントローラ2は、所定期間内でのエンジン3の燃料噴射量を合計することで単位時間当たりの車両100の燃料消費量を算出し、その算出結果を燃料消費量情報として、エンジン回転数情報と共にナビゲーション装置1へ出力する。
【0011】
車速センサ4は、車両100が走行しているときの速度を検出し、その検出結果を示す車両速度情報をナビゲーション装置1へ出力する。たとえば、車両100におけるホイールの回転状態に応じた車速パルスを車両速度情報としてナビゲーション装置1へ出力する。この車両速度情報に基づいて、ナビゲーション装置1において車両100の走行速度が検出される。
【0012】
次にナビゲーション装置1の構成について説明する。図2に示すように、ナビゲーション装置1は、制御部10、記録部11、振動ジャイロ12、GPS(Global Positioning System)受信部13、VICS(登録商標)受信部14、表示モニタ15、入力装置16およびスピーカ17を備えている。
【0013】
制御部10は、マイクロプロセッサや各種周辺回路、RAM、ROM等によって構成されており、自車位置検出処理部20、データ収集処理部21、データ選定処理部22、正味熱効率推定部23、燃料消費量予測部24および経路探索処理部25の各部を機能的に有している。制御部10は、記録部11に記録されている制御プログラムや地図データに基づいて、これらの各機能を実現するための処理を実行する。このとき実行される処理の具体的な内容については、後でフローチャートを用いて説明する。
【0014】
図1のエンジンコントローラ2から出力されたエンジン回転数情報および燃料消費量情報と、車速センサ4から出力された車両速度情報とは、ナビゲーション装置1において所定の受信処理が行われた後、制御部10に入力される。図2では、ナビゲーション装置1の制御部10に入力されるこれらの情報をまとめて「車両情報」と表している。
【0015】
記録部11は、制御部10の処理において使用される地図データ等の各種データを記録するための部分であり、たとえばHDD(Hard Disk Drive)やフラッシュメモリなどの不揮発性の記録媒体を用いて構成される。記録部11に記録されているデータは、必要に応じて制御部10の制御により記録部11から読み出される。
【0016】
記録部11に記録された地図データは、経路計算データと、道路データと、背景データとを含む。経路計算データは、目的地までの推奨経路を探索する際などに用いられるデータである。道路データは、道路の形状や種別などを表すデータである。道路データにおいて、各道路は後述するようにノードや形状補間点と呼ばれる点を複数繋げることによって構成されている。背景データは、地図の背景を表すデータである。なお、地図の背景とは、地図上に存在する道路以外の様々な構成物である。たとえば、河川、鉄道、緑地帯、各種構造物などが背景データによって表される。
【0017】
地図データにおいて道路網を構成する各道路の最小単位はリンクと呼ばれている。すなわち、所定の道路区間にそれぞれ対応する複数のリンクによって道路網が構成されており、リンク単位で経路計算データおよび道路データが表現されている。なお、道路データにおいて各リンクの両端には、座標情報や標高情報がそれぞれ設定されたノードと呼ばれる点が設けられている。また、各リンクの途中には形状補間点と呼ばれる点が必要に応じて設けられている。各形状補間点には、ノードと同様に座標情報や標高情報がそれぞれ設定されている。これらの点を順に繋げることにより、道路データにおいて道路の形状が表される。
【0018】
一方、経路計算データには、各道路区間に対応するリンクごとに、自車両が当該道路区間を走行する際の通過所要時間等に応じたリンクコストが設定されている。このリンクコストに基づいて、予め設定された経路探索条件に応じたリンクの組合せを求めることにより、ナビゲーション装置1において通常のルート探索による推奨経路の探索が行われる。たとえば、移動時間の短さを最優先として経路探索を行うような経路探索条件が設定されている場合は、出発地から目的地までの通過所要時間が最小となるリンクの組合せが推奨経路として求められる。
【0019】
振動ジャイロ12は、車両100の向きの変化に応じた角速度を検出するためのセンサである。振動ジャイロ12により検出された角速度は制御部10へ出力される。
【0020】
GPS受信部13は、GPS衛星から送信されるGPS信号を受信して制御部10へ出力する。GPS信号には、GPS衛星の位置と送信時刻に関する情報が含まれている。所定数以上のGPS衛星からGPS信号を受信することにより、GPS信号の受信位置として車両100の現在位置を算出することができる。
【0021】
制御部10の自車位置検出処理部20は、GPS受信部13により受信されたGPS信号と、車速センサ4から出力された車両速度情報と、振動ジャイロ12により検出された角速度に基づいて、車両100の現在位置を算出するための自車位置検出処理を所定時間ごとに実行する。なお、このとき必要に応じて記録部11に記録された地図データに基づいたマップマッチング処理が行われ、車両100の現在位置が道路の位置に合わせて補正される。
【0022】
VICS受信部14は、図示しないVICSセンターからナビゲーション装置1に対して送信されるVICS情報を受信する。このVICS情報をVICS受信部14が受信することにより、渋滞情報を始めとする様々な道路交通情報がナビゲーション装置1において取得される。VICS情報により提供される渋滞情報では、各リンクの道路状況を順調、混雑または渋滞の3種類の道路状況のうちいずれかで表現している。VICS受信部14により受信されたVICS情報は、制御部10に出力され、渋滞情報の表示や推奨経路の探索などに利用される。
【0023】
なお、VICSセンターからナビゲーション装置1へのVICS情報の送信は、主に高速道路上に設置されている電波ビーコンや、主に一般道路上に設置されている光ビーコン、またはFM多重放送によって行われる。電波ビーコンや光ビーコンは、その設置地点付近を通過する車両に対して、電波あるいは光(赤外線)により局所的にVICS情報を送信するものである。これに対して、FM多重放送では比較的広い地域に対してVICS情報を送信することができる。
【0024】
表示モニタ15は、ナビゲーション装置1において様々な画面表示を行うための装置であり、液晶ディスプレイ等を用いて構成される。この表示モニタ15により、地図画面の表示や推奨経路の案内表示などが行われる。表示モニタ15に表示される画面の内容は、制御部10が行う画面表示制御によって決定される。表示モニタ15は、たとえば自車両のダッシュボード上やインストルメントパネル内など、ユーザが見やすいような位置に設置されている。
【0025】
入力装置16は、ナビゲーション装置1を動作させるための様々な入力操作をユーザが行うための装置であり、各種の入力スイッチ類を有している。ユーザは、入力装置16を操作することにより、たとえば、目的地に設定したい施設や地点の名称等を入力したり、推奨経路の探索条件を設定したり、予め登録された登録地の中から目的地を選択したり、表示モニタ15に表示された地図を任意の方向にスクロールしたりすることができる。入力装置16は、操作パネルやリモコンなどによって実現することができる。あるいは、入力装置16を表示モニタ15と一体化されたタッチパネルとしてもよい。
【0026】
スピーカ17は、制御部10の制御により様々な音声情報を出力する。たとえば、推奨経路に従って自車両を目的地まで案内するための経路案内用の音声や、各種の警告音などがスピーカ17から出力される。
【0027】
ナビゲーション装置1の制御部10が実行する処理の内容について以下に説明する。制御部10は、データ収集処理部21、データ選定処理部22、正味熱効率推定部23、燃料消費量予測部24および経路探索処理部25の各部により、図3〜5のフローチャートに示す各処理を実行する。以下では、これらの処理について順に説明する。
【0028】
最初に、図3に示すデータ収集・選定処理のフローチャートについて説明する。制御部10は、車両100が走行しているときに、データ収集処理部21およびデータ選定処理部22により、図3に示すデータ収集・選定処理を所定の処理周期ごとに繰り返し実行する。
【0029】
図3のステップS10〜S50では、データ収集処理部21によるデータ収集処理を行う。ステップS10において、データ収集処理部21は、自車位置検出処理部20により検出された車両100の現在位置に基づいて、車両100が現在走行している道路区間の標高情報を取得する。ここでは、記録部11において記録されている地図データから、車両100の現在位置に対応するリンクの両端にある各ノードの標高情報を取得する。なお、車両100の現在位置に対応するリンクに形状補間点が設定されており、車両100の現在位置の前方または後方のいずれか一方または両方に形状補間点が存在する場合は、ノードの標高情報の代わりにこれらの形状補間点の標高情報を取得すればよい。
【0030】
ステップS20において、データ収集処理部21は、ステップS10で取得した標高情報に基づいて、車両100が現在走行している道路区間における道路勾配を計算する。ここでは、ステップS10で取得した各ノードまたは各形状補間点間の標高情報に基づいてこれらの標高差を算出し、その標高差を当該道路区間の距離で除算することにより道路勾配を計算する。なお、車両100が現在走行している道路区間の距離は、標高情報を取得した各ノードまたは各形状補間点間の座標値の差分に基づいて算出することができる。あるいは、当該道路区間の距離情報が地図データにおいて設定されている場合はこれを用いてもよい。
【0031】
ステップS30において、データ収集処理部21は、ステップS20で計算した道路勾配に基づいて、車両100が平坦な道路区間を走行しているか否かを判定するための平坦箇所判定を行う。ここでは、ステップS20で計算した道路勾配の大きさが所定の閾値の範囲内であれば、車両100が平坦な道路区間を走行していると判定し、そうでなければ車両100が平坦な道路区間を走行していないと判定する。たとえば、±0.5%の範囲を平坦である道路勾配の閾値として予め設定しておき、ステップS20で計算した道路勾配の大きさの百分率がこの閾値の範囲内であるか否かによりステップS30の平坦箇所判定を行うことができる。
【0032】
ステップS40において、データ収集処理部21は、ステップS30で行った平坦箇所判定の結果により、車両100が平坦箇所を走行中であるか否かを判定する。車両100が平坦な道路区間を走行しているとステップS30で判定した場合は、車両100が平坦箇所を走行中であるとしてステップS50へ進む。一方、車両100が平坦な道路区間を走行していないとステップS30で判定した場合は、車両100が平坦箇所を走行中ではないとして、次の処理周期まで待機した後にステップS10へ戻る。この場合、今回の処理周期では車両情報は取得されない。
【0033】
ステップS50において、データ収集処理部21は、車両100から出力される車両情報を取得する。ここでは前述のように、エンジンコントローラ2から出力されるエンジン回転数情報および燃料消費量情報と、車速センサ4から出力される車両速度情報とを、車両100からの車両情報として取得する。このようにして、車両100が走行しているときの車両情報を車両100から取得する。さらにこのときデータ収集処理部21は、振動ジャイロ12から角速度の検出結果を取得する。
【0034】
図3のステップS60〜S100では、データ選定処理部22によるデータ選定処理を行う。ステップS60において、データ選定処理部22は、ステップS50でデータ収集処理部21により取得された車両情報に含まれる車両速度情報に基づいて、現在と過去の間の車両100の速度の差が所定範囲内であるか否かを判定する。たとえば、現在の車両速度情報が表す車両100の速度と、現在よりも1秒前に取得した車両速度情報が表す車両100の速度との差分が1km/h以内であれば、車両100の速度差が所定範囲内であると判定してステップS70へ進む。そうでない場合は、車両100の速度差が所定範囲内ではないと判定し、次の処理周期まで待機した後にステップS10へ戻る。この場合、今回の処理周期では燃料消費量は記録されない。
【0035】
ステップS70において、データ選定処理部22は、ステップS50で振動ジャイロ12から取得された角速度の検出結果に基づいて、現在と過去の間の車両100の方位の差が所定範囲内であるか否かを判定する。たとえば、現在の角速度から求められた車両100の方位と、現在よりも1秒前に取得した角速度から求められた車両100の方位との差分が1°以内であれば、車両100の方位差が所定範囲内であると判定してステップS80へ進む。そうでない場合は、車両100の方位差が所定範囲内ではないと判定し、次の処理周期まで待機した後にステップS10へ戻る。この場合にも、今回の処理周期では燃料消費量は記録されない。
【0036】
ステップS80において、データ選定処理部22は、ステップS50でデータ収集処理部21により取得された車両情報に含まれるエンジン回転数情報に基づいて、現在と過去の間のエンジン3の回転数の差が所定範囲内であるか否かを判定する。たとえば、現在のエンジン回転数情報が表すエンジン3の回転数と、現在よりも1秒前に取得したエンジン回転数情報が表すエンジン3の回転数との差分が100rpm以内であれば、エンジン3の回転数差が所定範囲内であると判定してステップS90へ進む。そうでない場合は、エンジン3の回転数差が所定範囲内ではないと判定し、次の処理周期まで待機した後にステップS10へ戻る。この場合にも、今回の処理周期では燃料消費量は記録されない。
【0037】
ステップS90において、データ選定処理部22は、ステップS50でデータ収集処理部21により取得された車両情報に含まれる燃料消費量情報に基づいて、現在と過去の間の車両100の燃料消費量の差が所定範囲内であるか否かを判定する。たとえば、現在の燃料消費量情報が表す車両100の燃料消費量と、現在よりも1秒前に取得した燃料消費量情報が表す車両100の燃料消費量との差分が0.01cc以内であれば、車両100の燃料消費量差が所定範囲内であると判定してステップS100へ進む。そうでない場合は、車両100の燃料消費量差が所定範囲内ではないと判定し、次の処理周期まで待機した後にステップS10へ戻る。この場合にも、今回の処理周期では燃料消費量は記録されない。
【0038】
なお、以上説明したステップS60〜S90の各処理は、必ずしも全てを実行する必要はなく、いずれかを適宜省略してもよい。すなわち、ステップS60〜S90の各処理のうちいずれか少なくとも一つを実行することにより、データ選定処理部22は、ステップS50で取得した車両情報に含まれる燃料消費量情報から、ステップS100で記録対象とする燃料消費量情報を選定することができる。
【0039】
ステップS100において、データ選定処理部22は、ステップS50でデータ収集処理部21により取得された車両情報に基づいて、車両100の燃料消費量を記録部11に記録する。すなわち、ステップS50で取得された車両情報に含まれる燃料消費量情報が表す車両100の燃料消費量を記録部11に記録する。
【0040】
ここで、ステップS100で燃料消費量を記録部11に記録するときの記録方法の例について説明する。図6は、燃料消費量の記録に用いられる燃料消費量学習テーブルの例を示している。この燃料消費量学習テーブルでは、車両100の走行速度を10km/h間隔で複数の速度帯に分け、その速度帯ごとに、ステップS60〜S90の各処理によって選定された燃料消費量の値が分類して記録されている。なお、図6において燃料消費量が空欄の部分は、その速度帯の燃料消費量がまだ記録されていないことを表している。図6のような燃料消費量学習テーブルは、たとえばリングバッファを用いて実現することができる。
【0041】
さらに図6に示す燃料消費量学習テーブルでは、複数の速度帯をまとめて一つのグループとしてグループ分けされており、各グループに対して個別のテーブル番号が割り当てられている。たとえば、10km/h、20km/hおよび30km/hの各速度帯によって構成されるグループには、テーブル番号として「テーブル1」が設定されている。同様に、図6に示す各速度帯のグループに対して、その速度の値が小さいものから順に、「テーブル2」、「テーブル3」、「テーブル4」および「テーブル5」の各テーブル番号がそれぞれ設定されている。
【0042】
図3のステップS100では、ステップS50で取得された車両情報に含まれる車両速度情報に基づいて、以上説明したような燃料消費量学習テーブルの該当する速度帯の欄に燃料消費量が記録される。こうした燃料消費量学習テーブルを記録部11において記録しておくことにより、ナビゲーション装置1は車両100が走行しているときの燃料消費量を学習することができる。なお、図6に示した燃料消費量学習テーブルのフォーマットは一例であるため、これ以外のフォーマットによる燃料消費量学習テーブルを用いて燃料消費量を記録部11に記録してもよい。
【0043】
ステップS100を実行したら、データ選定処理部22は、次の処理周期まで待機した後にステップS10へ戻る。以上説明したようにして、図3のフローチャートに示すデータ収集・選定処理が実行される。
【0044】
次に、図4に示す正味熱効率推定処理のフローチャートについて説明する。制御部10は、正味熱効率推定部23により、図4に示す正味熱効率推定処理を所定の処理周期ごとに繰り返し実行する。
【0045】
ステップS110において、正味熱効率推定部23は、記録部11に記録されている燃料消費量学習テーブルから、図3のステップS100で記録された燃料消費量の学習データ量が所定の閾値を超えたテーブルを検索する。ここでは、前述のような燃料消費量学習テーブルにおける速度帯を複数のグループに分け、そのグループ単位で、前回の処理時と比べた燃料消費量の学習データの増加量が所定の閾値を超えたものを検索対象として求める。すなわち、図6に例示した燃料消費量学習テーブルでは、「テーブル1」〜「テーブル5」の各テーブル番号に対応するグループ単位で、所定数以上の燃料消費量が新たに記録されたものを検索する。
【0046】
ステップS120において、正味熱効率推定部23は、ステップS110で検索したグループについて、車両100の速度に応じた正味熱効率を推定する。ここでは、検索されたグループに属する各速度帯に対して新たな学習データとして記録された各燃料消費量に基づいて、予め定められた燃料消費量と正味熱効率の関係式を用いて、グループごとの正味熱効率の推定値を算出する。たとえば、各燃料消費量を入力値とする重回帰分析を行うことにより、正味熱効率の推定値を算出することができる。
【0047】
ステップS130において、正味熱効率推定部23は、ステップS120による正味熱効率の推定結果を記録部11に記録する。ここでは、ステップS120で正味熱効率の推定値を算出したグループごとに分類して、その推定値を記録部11に記録する。なお、当該グループに対して既に推定値が記録されている場合は、その推定値を新たに算出された推定値で更新する。
【0048】
図7は、正味熱効率の推定結果の記録に用いられる正味熱効率テーブルの例を示している。この正味熱効率テーブルでは、図6の燃料消費量学習テーブルにおいて設定されている「テーブル1」〜「テーブル5」の各テーブル番号のグループに対して、算出された正味熱効率εの推定値と、その推定値の使用速度帯とがそれぞれ記録されている。なお、図7において「−」が表示されている部分は、そのグループに対する正味熱効率εの推定値がまだ算出されていないことを表している。
【0049】
図4のステップS130では、以上説明したような正味熱効率テーブルの該当するグループの欄に算出された正味熱効率εの推定値が記録される。なお、図7に示した正味熱効率テーブルのフォーマットは一例であるため、これ以外のフォーマットによる正味熱効率テーブルを用いて正味熱効率εの推定値を記録部11に記録してもよい。
【0050】
ステップS130を実行したら、正味熱効率推定部23は、次の処理周期まで待機した後にステップS110へ戻る。以上説明したようにして、図4のフローチャートに示す正味熱効率推定処理が実行される。
【0051】
続いて、図5に示す経路探索処理のフローチャートについて説明する。制御部10は、ユーザの操作により目的地が設定され、その目的地までの省エネルート探索の要求があったときに、燃料消費量予測部24および経路探索処理部25により、図5に示す経路探索処理を実行する。
【0052】
図5のステップS210〜S240では、燃料消費量予測部24による燃料消費量予測処理を行う。ステップS210において、燃料消費量予測部24は、燃料消費量の予測を行う対象リンクを選択する。ここでは、たとえば車両100の現在位置から目的地までの間に存在する各メッシュ内のリンクを対象リンクとして選択する。なお、記録部11に記録されている地図データには、メッシュと呼ばれる区画が所定距離ごとに予め設定されており、メッシュ単位で地図データが管理されている。
【0053】
ステップS220において、燃料消費量予測部24は、ステップS210で選択した各対象リンクについて、そのリンク内の平均速度を計算する。ここでは、地図データにおいて記録されている各対象リンクの距離やリンク旅行時間の情報に基づいて、各対象リンク内の平均速度を算出することができる。さらにこのとき、VICS受信部14により受信されたVICS情報や、地図データと共に記録部11に記録されている統計交通情報において渋滞情報が設定されている対象リンクについては、その渋滞情報を加味して平均速度を計算することが好ましい。
【0054】
ステップS230において、燃料消費量予測部24は、ステップS220で計算した各対象リンク内の平均速度に基づいて、各対象リンクに対する正味熱効率を取得する。ここでは、ステップS220で算出された各対象リンク内の平均速度が図7に例示した正味熱効率テーブルにおいてどの使用速度帯に対応するかを判断し、その使用速度帯に対して記録されている正味熱効率εの推定値を記録部11から読み取る。こうした処理を各対象リンクについてそれぞれ行うことにより、各対象リンクに対する正味熱効率を取得することができる。
【0055】
ステップS240において、燃料消費量予測部24は、ステップS230で各対象リンクに対して取得した正味熱効率に基づいて、各対象リンクの燃料消費量の予測値を計算する。ここでは、以下の式(1)によって表される予測モデルを用いて、各対象リンクの正味熱効率εの推定値に対応する燃料消費量Qの予測値(単位:cc)を対象リンクごとに算出する。
【0056】
【数1】
・・・(1)
【0057】
上記の式(1)において、F(単位:cc)は基礎燃料消費量を表しており、下記の式(2)により算出される。ηは伝達効率を表しており、車両100のトランスミッション構造等に応じて予め設定されている定数である。H(単位:J/cc)は燃料1cc当たりの仕事当量を表しており、燃料の種類等に応じて予め設定されている定数である。Rf、Ri、Ra、Rb(単位:kg・m2/s2)は摩擦抵抗、勾配抵抗、空気抵抗、加速抵抗をそれぞれ表しており、下記の式(3)〜(6)によりそれぞれ算出される。
【0058】
【数2】
・・・(2)
【0059】
上記の式(2)において、Filde(単位:cc/s)は単位時間当たりの燃料消費量を表しており、予め設定されている定数である。t(単位:s)はリンク旅行時間を表しており、前述のステップS220で計算される各対象リンクのリンク内平均速度とリンク距離に応じて対象リンクごとに決定される。Fcutは各対象リンク内での燃料カットの割合を表しており、対象リンクごとに設定される。たとえば、各対象リンクの渋滞状況や、地図データにおいて各対象リンクの両端に存在する交差点の種類等に基づいて、各対象リンクにおける車両100の停止時間の割合を求め、これに応じて対象リンクごとにFcutの値を設定することができる。
【0060】
【数3】
・・・(3)
【0061】
上記の式(3)において、μは摩擦抵抗係数を表しており、予め設定されている定数である。M(単位:kg)は車両100の重量を表しており、予め設定されている定数である。g(単位:m/s2)は重力加速度を表しており、予め設定されている定数である。l(単位:m)は各対象リンクのリンク長を表しており、地図データにおいて記録されているリンク距離情報に基づいて対象リンクごとに設定される。
【0062】
【数4】
・・・(4)
【0063】
上記の式(4)において、Mとgは式(3)と同じく、車両100の重量と重力加速度をそれぞれ表している。h(単位:m)は各対象リンクの高低差を表しており、対象リンクごとに設定される。たとえば、前述の図3においてステップS20で説明した道路勾配の計算処理における標高差と同様に、各対象リンクの両端に位置する各ノードの標高情報を取得してこれらの差分を算出することで、対象リンクごとにhの値を設定することができる。
【0064】
【数5】
・・・(5)
【0065】
上記の式(5)において、ρ(単位:kg/m3)は空気密度を表しており、予め設定されている定数である。S(単位:m2)は車両100の前面投影面積を表しており、予め設定されている定数である。Cdは空気抵抗係数を表しており、予め設定されている定数である。Vs(単位:m/s)は各対象リンクのリンク速度を表しており、前述のステップS220で計算される各対象リンクのリンク内平均速度と同じである。lは式(3)と同じく、各対象リンクのリンク長を表している。
【0066】
【数6】
・・・(6)
【0067】
上記の式(5)において、Mは式(3)、(4)と同じく、車両100の重量を表している。m(単位:kg)は車両100の回転部分相当質量を表しており、予め設定されている定数である。Ve(単位:m/s)は各対象リンクの次のリンクにおけるリンク速度を表しており、前述のVsと同じく、ステップS220で当該リンクに対して計算されるリンク内平均速度と同じである。Vsは式(5)と同じく、各対象リンクのリンク速度を表している。
【0068】
ステップ240では、以上説明したような予測モデルを用いて、正味熱効率εの推定値に対応する燃料消費量Qの予測値が算出される。こうして燃料消費量の予測値を各対象リンクについて算出することで、燃料消費量予測部24は車両100がこれから走行する予定の道路に対する燃料消費量を予測する。
【0069】
ステップS250において、経路探索処理部25は、ステップS240で計算された各対象リンクの燃料消費量の予測値に基づいて、車両100の現在位置から設定された目的地までの経路探索を行う。ここでは、車両100の現在位置を出発地として、そこから目的地までの間で燃料消費量の予測値が最小となるリンクの組み合わせをダイクストラ法等の周知の手法を用いて探索し、探索されたリンクの組み合わせを推奨経路に設定する。こうして経路探索処理部25が経路探索を行うことにより、ナビゲーション装置1において省エネルート探索が実現される。
【0070】
ステップS250を実行したら、制御部10は探索結果として得られた推奨経路を表示モニタ15に表示し、図5のフローチャートを終了する。以上説明したようにして、図5のフローチャートに示す経路探索処理が実行される。
【0071】
以上説明した実施の形態によれば、次のような作用効果を奏することができる。
【0072】
(1)ナビゲーション装置1は、データ収集処理部21により、車両100が走行しているときの速度情報および燃料消費量情報を含む車両情報を車両100から取得し(ステップS50)、その車両情報に基づいて、データ選定処理部22により、車両100の燃料消費量を学習する(ステップS100)。こうして学習された車両100の燃料消費量に基づいて、正味熱効率推定部23により、車両100の速度に応じた正味熱効率を推定して記録し(ステップS120、S130)、その正味熱効率に基づいて、燃料消費量予測部24により、車両100が走行する予定の道路に対する燃料消費量を予測する(ステップS240)。このようにしたので、車両100の速度に応じた正味熱効率の変化を考慮して、燃料消費量を正確に予測することができる。
【0073】
(2)データ収集処理部21は、ステップS100において、ステップS50で取得した車両情報に基づいて車両100の燃料消費量を速度帯ごとに分類した図6のような燃料消費量学習テーブルを記録部11に記録することにより、車両100の燃料消費量を学習する。正味熱効率推定部23は、ステップS120において、この燃料消費量学習テーブルに基づいて、車両100の速度に応じた正味熱効率を推定する。このようにしたので、車両100の速度に応じた正味熱効率を確実かつ容易に推定することができる。
【0074】
(3)燃料消費量学習テーブルは、図6に示すように複数の速度帯をまとめて一つのグループとしてグループ分けされている。正味熱効率推定部23は、ステップS120において、この燃料消費量学習テーブルにおいて所定数以上の燃料消費量が記録されたグループについて、正味熱効率を推定する。このようにしたので、車両100の速度に応じた正味熱効率の推定を適切なタイミングで行うことができる。
【0075】
(4)データ収集処理部21は、車両100が平坦な道路区間を走行しているか否かを判定し(ステップS40)、平坦な道路区間を走行していないと判定された場合、ステップS50において車両情報を取得しないようにした。これにより、車両100が平坦な道路区間を走行していないときに出力された正味熱効率の推定に用いるのに適切ではない車両情報を取得対象から除外することができる。そのため、正味熱効率推定部23により正味熱効率を正確に推定することができる。
【0076】
(5)ナビゲーション装置1は、データ選定処理部22がデータ選定処理を行うことにより、ステップS50でデータ収集処理部21によって取得された車両情報に含まれる燃料消費量情報から処理対象とする燃料消費量情報を選定する(ステップS60〜S90)。正味熱効率推定部23は、このデータ選定処理によって選定された燃料消費量情報に基づいて、ステップS120において正味熱効率を推定する。このようにしたので、正味熱効率の推定に用いるのに適切な燃料消費量情報を選定し、正確な正味熱効率の推定値を得ることができる。
【0077】
(6)データ選定処理部22は、ステップS60〜S90において、車速センサ4からの速度情報が表す車両100の速度、自車位置検出処理部20により検出された車両100の方位、車両情報に含まれるエンジン回転数情報が表す車両100のエンジン回転数、および燃料消費量情報が表す車両100の燃料消費量のいずれか少なくとも一つにおける現在の値と過去の値との差分に基づいて、処理対象とする燃料消費量情報を選定する。このようにしたので、車両100の状態変化を考慮して、正味熱効率の推定に用いるのに適切な燃料消費量情報を確実に選定することができる。
【0078】
(7)ナビゲーション装置1は、経路探索処理部25により、ステップS240で燃料消費量予測部24によって予測された燃料消費量に基づいて、車両100に対する推奨経路を探索する(ステップS250)。このようにしたので、目的地までの燃料消費量が最も少ない経路を探索して推奨経路とする省エネルート探索を実現することができる。
【0079】
(8)燃料消費量予測部24は、推奨経路の探索に用いる対象リンクを選択し(ステップS210)、その対象リンク内の平均速度を計算する(ステップS220)。そして、ステップS120、S130で正味熱効率推定部23によって推定され記録された正味熱効率のうち、ステップS220で計算された対象リンク内の平均速度に応じた正味熱効率を取得し(ステップS230)、その正味熱効率に基づいて、対象リンクに対する燃料消費量をステップS240において予測する。このようにしたので、車両100の速度に応じて推定された正味熱効率のうち対象リンクにとって最適な正味熱効率を用いて、燃料消費量の予測を行うことができる。
【0080】
なお、上記実施の形態では、燃料消費量予測部24によって予測された各対象リンクの燃料消費量を省エネルート探索に利用するナビゲーション装置1での適用例を説明したが、ナビゲーション装置以外の車載装置や燃料消費量予測装置において本発明を適用してもよい。前述したような各処理を行うことにより、処理対象とする道路を車両が走行したときの燃料消費量を予測できるものであれば、どのような装置についても本発明を適用可能である。
【0081】
以上説明した実施の形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されるものではない。
【符号の説明】
【0082】
1:ナビゲーション装置、2:エンジンコントローラ、3:エンジン、4:車速センサ、
10:制御部、11:記録部、12:振動ジャイロ、13:GPS受信部、
14:VICS受信部、15:表示モニタ、16:入力装置、17:スピーカ、
20:自車位置検出処理部、21:データ収集処理部、22:データ選定処理部、
23:正味熱効率推定部、24:燃料消費量予測部、25:経路探索処理部、
100:車両
【特許請求の範囲】
【請求項1】
車両が走行しているときの速度情報および燃料消費量情報を含む車両情報を前記車両から取得する車両情報取得手段と、
前記車両情報取得手段により取得された車両情報に基づいて、前記車両の燃料消費量を学習する学習手段と、
前記学習手段により学習された前記車両の燃料消費量に基づいて、前記車両の速度に応じた正味熱効率を推定する正味熱効率推定手段と、
前記正味熱効率推定手段により推定された正味熱効率に基づいて、前記車両が走行する予定の道路に対する燃料消費量を予測する燃料消費量予測手段とを備えることを特徴とする燃料消費量予測装置。
【請求項2】
請求項1に記載の燃料消費量予測装置において、
前記学習手段は、前記車両情報に基づいて前記車両の燃料消費量を速度帯ごとに分類した燃料消費量学習テーブルを記録手段に記録することにより、前記車両の燃料消費量を学習し、
前記正味熱効率推定手段は、前記燃料消費量学習テーブルに基づいて、前記車両の速度に応じた正味熱効率を推定することを特徴とする燃料消費量予測装置。
【請求項3】
請求項2に記載の燃料消費量予測装置において、
前記燃料消費量学習テーブルは、複数の速度帯をまとめて一つのグループとしてグループ分けされており、
前記正味熱効率推定手段は、前記燃料消費量学習テーブルにおいて所定数以上の燃料消費量が記録されたグループについて、前記正味熱効率を推定することを特徴とする燃料消費量予測装置。
【請求項4】
請求項1乃至3のいずれか一項に記載の燃料消費量予測装置において、
前記車両が平坦な道路区間を走行しているか否かを判定する平坦判定手段をさらに備え、
前記平坦判定手段により前記車両が平坦な道路区間を走行していないと判定された場合、前記車両情報取得手段は、前記車両情報を取得しないことを特徴とする燃料消費量予測装置。
【請求項5】
請求項1乃至4のいずれか一項に記載の燃料消費量予測装置において、
前記車両情報取得手段により取得された車両情報に含まれる燃料消費量情報から処理対象とする燃料消費量情報を選定する選定処理手段をさらに備え、
前記正味熱効率推定手段は、前記選定処理手段により選定された燃料消費量情報に基づいて前記正味熱効率を推定することを特徴とする燃料消費量予測装置。
【請求項6】
請求項5に記載の燃料消費量予測装置において、
前記車両の方位を検出する方位検出手段をさらに備え、
前記車両情報は、前記車両のエンジン回転数情報をさらに含み、
前記選定処理手段は、前記速度情報が表す前記車両の速度、前記方位検出手段により検出された前記車両の方位、前記エンジン回転数情報が表す前記車両のエンジン回転数、および前記燃料消費量情報が表す前記車両の燃料消費量のいずれか少なくとも一つにおける現在の値と過去の値との差分に基づいて、前記処理対象とする燃料消費量情報を選定することを特徴とする燃料消費量予測装置。
【請求項7】
請求項1乃至6のいずれか一項に記載の燃料消費量予測装置と、
前記燃料消費量予測手段により予測された燃料消費量に基づいて、前記車両に対する推奨経路を探索する経路探索手段とを備えることを特徴とするナビゲーション装置。
【請求項8】
請求項7に記載のナビゲーション装置において、
前記推奨経路の探索に用いる対象リンクを選択する対象リンク選択手段と、
前記対象リンク内の平均速度を計算する平均速度計算手段とをさらに備え、
前記燃料消費量予測手段は、前記正味熱効率推定手段により推定された正味熱効率のうち、前記平均速度計算手段により計算された前記対象リンク内の平均速度に応じた正味熱効率に基づいて、前記対象リンクに対する燃料消費量を予測することを特徴とするナビゲーション装置。
【請求項9】
車両に搭載されたコンピュータによる前記車両の燃料消費量の予測方法であって、
前記コンピュータにより、
前記車両が走行しているときの速度情報および燃料消費量情報を含む車両情報を前記車両から取得し、
前記車両情報に基づいて、前記車両の燃料消費量を学習し、
前記車両の燃料消費量の学習結果に基づいて、前記車両の速度に応じた正味熱効率を推定し、
前記正味熱効率に基づいて、前記車両が走行する予定の道路に対する燃料消費量を予測することを特徴とする燃料消費量予測方法。
【請求項1】
車両が走行しているときの速度情報および燃料消費量情報を含む車両情報を前記車両から取得する車両情報取得手段と、
前記車両情報取得手段により取得された車両情報に基づいて、前記車両の燃料消費量を学習する学習手段と、
前記学習手段により学習された前記車両の燃料消費量に基づいて、前記車両の速度に応じた正味熱効率を推定する正味熱効率推定手段と、
前記正味熱効率推定手段により推定された正味熱効率に基づいて、前記車両が走行する予定の道路に対する燃料消費量を予測する燃料消費量予測手段とを備えることを特徴とする燃料消費量予測装置。
【請求項2】
請求項1に記載の燃料消費量予測装置において、
前記学習手段は、前記車両情報に基づいて前記車両の燃料消費量を速度帯ごとに分類した燃料消費量学習テーブルを記録手段に記録することにより、前記車両の燃料消費量を学習し、
前記正味熱効率推定手段は、前記燃料消費量学習テーブルに基づいて、前記車両の速度に応じた正味熱効率を推定することを特徴とする燃料消費量予測装置。
【請求項3】
請求項2に記載の燃料消費量予測装置において、
前記燃料消費量学習テーブルは、複数の速度帯をまとめて一つのグループとしてグループ分けされており、
前記正味熱効率推定手段は、前記燃料消費量学習テーブルにおいて所定数以上の燃料消費量が記録されたグループについて、前記正味熱効率を推定することを特徴とする燃料消費量予測装置。
【請求項4】
請求項1乃至3のいずれか一項に記載の燃料消費量予測装置において、
前記車両が平坦な道路区間を走行しているか否かを判定する平坦判定手段をさらに備え、
前記平坦判定手段により前記車両が平坦な道路区間を走行していないと判定された場合、前記車両情報取得手段は、前記車両情報を取得しないことを特徴とする燃料消費量予測装置。
【請求項5】
請求項1乃至4のいずれか一項に記載の燃料消費量予測装置において、
前記車両情報取得手段により取得された車両情報に含まれる燃料消費量情報から処理対象とする燃料消費量情報を選定する選定処理手段をさらに備え、
前記正味熱効率推定手段は、前記選定処理手段により選定された燃料消費量情報に基づいて前記正味熱効率を推定することを特徴とする燃料消費量予測装置。
【請求項6】
請求項5に記載の燃料消費量予測装置において、
前記車両の方位を検出する方位検出手段をさらに備え、
前記車両情報は、前記車両のエンジン回転数情報をさらに含み、
前記選定処理手段は、前記速度情報が表す前記車両の速度、前記方位検出手段により検出された前記車両の方位、前記エンジン回転数情報が表す前記車両のエンジン回転数、および前記燃料消費量情報が表す前記車両の燃料消費量のいずれか少なくとも一つにおける現在の値と過去の値との差分に基づいて、前記処理対象とする燃料消費量情報を選定することを特徴とする燃料消費量予測装置。
【請求項7】
請求項1乃至6のいずれか一項に記載の燃料消費量予測装置と、
前記燃料消費量予測手段により予測された燃料消費量に基づいて、前記車両に対する推奨経路を探索する経路探索手段とを備えることを特徴とするナビゲーション装置。
【請求項8】
請求項7に記載のナビゲーション装置において、
前記推奨経路の探索に用いる対象リンクを選択する対象リンク選択手段と、
前記対象リンク内の平均速度を計算する平均速度計算手段とをさらに備え、
前記燃料消費量予測手段は、前記正味熱効率推定手段により推定された正味熱効率のうち、前記平均速度計算手段により計算された前記対象リンク内の平均速度に応じた正味熱効率に基づいて、前記対象リンクに対する燃料消費量を予測することを特徴とするナビゲーション装置。
【請求項9】
車両に搭載されたコンピュータによる前記車両の燃料消費量の予測方法であって、
前記コンピュータにより、
前記車両が走行しているときの速度情報および燃料消費量情報を含む車両情報を前記車両から取得し、
前記車両情報に基づいて、前記車両の燃料消費量を学習し、
前記車両の燃料消費量の学習結果に基づいて、前記車両の速度に応じた正味熱効率を推定し、
前記正味熱効率に基づいて、前記車両が走行する予定の道路に対する燃料消費量を予測することを特徴とする燃料消費量予測方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−77051(P2013−77051A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−215085(P2011−215085)
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]