
爪進退式玩具およびこの使用方法

【課題】 操作部材を操作することで、爪を出し入れできる爪進退式玩具とその使用方法の提供。
【解決手段】 回動操作される操作部材6を有する基部材2と、基部材に対して関節組立体10を介して軸支され、初期位置から回動位置に回動され、かつ操作部の押圧解除により回動位置から初期位置に回動されるように回動付勢される手組立体20と、手組立体の内部に位置する待機位置と、複数の爪部12aが手組立体の先端から突出する突出位置との間で移動され、かつ待機位置に移動付勢される爪部材12と、手組立体の回動動作に連動して爪部材を突出位置に移動させるための連動機構を備える。
【解決手段】 回動操作される操作部材6を有する基部材2と、基部材に対して関節組立体10を介して軸支され、初期位置から回動位置に回動され、かつ操作部の押圧解除により回動位置から初期位置に回動されるように回動付勢される手組立体20と、手組立体の内部に位置する待機位置と、複数の爪部12aが手組立体の先端から突出する突出位置との間で移動され、かつ待機位置に移動付勢される爪部材12と、手組立体の回動動作に連動して爪部材を突出位置に移動させるための連動機構を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、爪進退式玩具に係り、操作部を操作することでよりリアルな動物の動作を任意に楽しむことのできる子供用玩具として好適な技術に関するものである。
【背景技術】
【0002】
動物を模した種々の玩具の内で、手足の簡単な動きを再現可能にした玩具が提案されている。具体的には、手を開放状態と把持状態に任意に設定するために腕部分に相当する基部の端部において回動自在に手部材を軸支し、基部と手部材の間にコイルバネ機構を設けておき、手の回動にともないコイルバネが屈曲して引張り力が無くなる状態と、コイルバネが直線状になり引張り力を発生する状態とに任意に設定することで、開放状態と把持状態に保持できるように構成されている。このように構成された手または足を動物玩具本体に固定することで、動物が小物を把持した状態を任意に再現可能にして楽しく遊べるようにしている。(特許文献1)。
【0003】
一方、動物玩具において、頭部、手足、尻尾のみを誇張して再現し、幼児などが任意に操作して動物に特徴的なユーモラスな動きを再現可能にした玩具も提案されている。
【特許文献1】実公昭55−14384号公報。
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の動物に特徴的なユーモラスな動きを再現可能にした玩具の内で、例えば猫の手のユーモラスな動きを再現可能にした玩具によれば、操作部の操作を行うことで手招きする動作を再現できるが、それ以上の動作は再現できない。
【0005】
したがって、本発明は上記の問題点に鑑みて成されたものであり、操作部を操作することでよりリアルな動物の動作を任意に楽しむことのできる爪進退式玩具とその使用方法の提供を目的としている。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明の爪進退式玩具によれば、回動操作される操作部を有する基部材と、前記基部材に対して関節組立体を介して軸支されるとともに、前記操作部の押圧操作により初期位置から回動位置に回動され、かつ前記操作部の押圧解除により前記回動位置から前記初期位置に回動されるように回動付勢される手組立体と、複数の爪部が前記手組立体の内部に位置する待機位置と、前記複数の爪部が前記手組立体の先端から突出する突出位置との間で移動され、かつ前記待機位置に移動付勢される爪部材と、前記手組立体の前記回動動作に連動して、前記爪部材を前記待機位置から前記突出位置に移動させるための連動手段と、を備えることを特徴としている。
【0007】
また、前記複数の爪部の本数は少なくとも2本以上、または4本、あるいは5本に設定されることを特徴としている。
【0008】
また、前記関節組立体は、形状部材と、前記基部材との間で前記軸支する第1ピン部材と、前記手組立体との間で前記軸支する第2ピン部材と、前記形状部材の側面に形成された第1カム面と、前記第2ピン部材周りに形成された第2カム面とから構成され、前記連動手段は、一端が前記操作部に接続され、他端が前記手組立体に接続されるとともに、前記第1ピン部材および前記第2ピン部材と前記形状部材に固定された中間部材との間を通過させることで、引張り力を前記手組立体に伝達可能にした腱部材と、前記第1カム面に対して摺接するように前記第2ピン部材周りに前記手組立体側に形成される摺接面と、一端部が前記第2カム面に対して摺接され、他端部が前記爪部材の基部に対して摺接することで、前記爪部材を前記待機位置から前記突出位置に移動させるように前記手組立体内で揺動軸支される揺動カム部材とから構成され、前記操作部が押圧操作されると、前記腱部材を介して前記引張り力が前記手組立体に伝達されることで、前記第1カム面に対して前記摺接面が当接して、前記手組立体が前記回動位置に向けて回動されることを特徴としている。
【0009】
また、前記操作部がさらに押圧操作されると、前記腱部材を介して前記引張り力が前記手組立体に伝達されるとともに、前記揺動カム部材の前記一端部が前記第2カム面に摺接されて前記揺動カム部材が揺動され、前記他端部が前記爪部材の基部に対して摺接することにより、前記爪部材が前記待機位置から前記突出位置に移動されることを特徴としている。
【0010】
また、前記第1カム面は前記形状部材の両側面に一体形成され、前記手組立体側に形成される前記摺接面は前記第1カム面に対応する位置に一対分形成されるとともに、前記第2カム面は前記形状部材の両端部に一体形成され、前記一端部は前記第2カム面に対応する位置に一対分が一体形成され、さらに前記他端部も一対分が一体形成されることを特徴としている。
【0011】
また、前記手組立体に前記複数の爪部が突出する孔部を穿設し、前記手組立体と、前記関節組立体と、前記基部材の表面全体とを覆うとともに、その開口端が前記基部材に形成された溝部に嵌る環状部材を用いて固定されるように有底筒状に形成されるカバー部材を備えたことを特徴としている。
【0012】
また、前記カバー部材に対してシリコンラバー製を含む肉球を、縫合を含む方法で固定したことを特徴としている。
【0013】
そして、回動操作される操作部を有する基部材に対して関節組立体を介して軸支されるとともに、操作部の押圧操作により初期位置から回動位置に回動され、かつ前記操作部の押圧解除操作により前記回動位置から前記初期位置に回動されるように回動付勢される手組立体と、複数の爪部が前記手組立体の内部に位置する待機位置と、前記複数の爪部が前記手組立体の先端から突出する突出位置との間で移動され、かつ前記待機位置に移動付勢される爪部材と、前記手組立体の前記回動動作に連動して、前記爪部材を前記待機位置から前記突出位置に移動させるための連動手段と、を備えた爪進退式玩具の使用方法であって、前記操作部を押圧操作することにより、前記関節組立体を介して前記手組立体が初期位置から回動位置に回動され、これに連動して複数の爪部が前記手組立体の先端から突出され、前記操作部を押圧解除操作することにより、前記関節組立体を介して前記手組立体が回動位置から初期位置に回動され、これに連動して複数の爪部を前記手組立体の先端から後退させることを特徴としている。
【発明の効果】
【0014】
本発明によれば、操作部材を押圧操作することで関節組立体を介して手組立体が初期位置から回動位置に回動され、これに連動して複数の爪部が手組立体の先端から突出され、また操作部を押圧解除することで、関節組立体を介して手組立体が回動位置から初期位置に回動され、これに連動して複数の爪部を手組立体の先端から後退させることができる新規な構造を備えた爪進退式玩具およびその使用方法を提供することができる。
【発明を実施するための最良の形態】
【0015】
以下に、本発明の好適な一実施形態について添付の各図面を参照して述べる。
【0016】
ここで、本発明は様々な修正と変更が可能であり、その内の特定の事例が図面に図示されており、以下に詳細に記述されることになるが、これらに限定されず請求の範囲に規定された範囲で種々の構成が可能であることは言うまでもなく、後述する玩具用途以外にも全ての爪進退式玩具に適用可能である。
【0017】
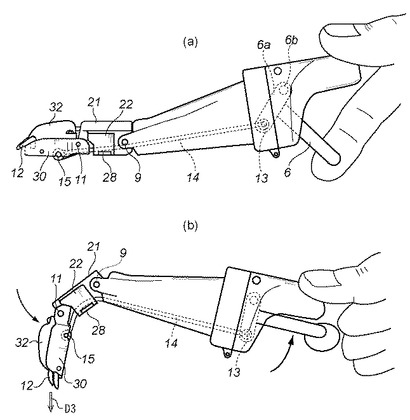
先ず、図1(a)は本発明の一実施形態である爪進退式玩具1の操作前の状態を示した正面図、(b)は、爪進退式玩具1の操作後の状態を示した正面図である。
【0018】
図1において、この爪進退式玩具1は、動物として猫の手を模しているが、これに限定されず後述の爪の出し入れを行う全ての動物に適用可能である。この爪進退式玩具1は、子供が使用されることを前提としており、全長寸法が約15cmの全樹脂製(ただし、金属製ピン、スキンカバーなどを除く)であり、さらにボールチェーンMを設けることで、例えばキーホルダーとしても使用できるように構成されている。また、鈴Kをさらに吊り下げることで猫を強調できるようにしている。
【0019】
図1(a)において、この爪進退式玩具1は、後述するように回動操作される操作部材6を有する基部材2を設けている。この基部材2は、把持部3と溝部4とを一体成型しており、後述のように2分割されて構成されることで部品を内蔵可能にしている。この基部材2に対して第1ピン部材9を介して関節組立体10が軸支される。
【0020】
この関節組立体10は第2ピン部材11を介して手組立体20を軸支している。この手組立体20には爪部材12が内蔵されており、図示の待機位置から図1(b)に図示する突出位置に移動させるように構成されている。
【0021】
一方、底部に爪部材12の複数の爪部12aを突出する孔部を穿設し、かつ手組立体20と関節組立体10と基部材2の表面を覆う猫のスキンカバー7が図中の一点鎖線で示すように設けられている。このスキンカバー7は、起毛布から縫製されており、その開口端が基部材2に形成された溝部4に位置された状態で環状部材5を図中の矢印方向に移動および圧入することで固定される。また、このスキンカバー7に対してシリコンラバー製を含む肉球8を、縫合を含む方法で固定することでよりリアル感を演出している。
【0022】
次に、図1(b)をさらに参照して、以上のように構成される爪進退式玩具1の操作部材6を把持部3との間で把持して矢印D1方向に押圧操作すると、関節組立体10と手組立体20とが矢印D2方向に初期位置から回動位置に回動され、手組立体20に内蔵されていた爪部材12の爪部12aが後述する連動機構の作用によって待機位置から突出位置に移動されることで矢印D3方向に移動されて、スキンカバー7の孔部を介して外部に突出する。
【0023】
また、操作部材6の押圧を解除すると、図1(a)に図示したように関節組立体10を介して手組立体20が回動位置から初期位置に回動されるとともに、これに連動して複数の爪部12aがスキンカバー7の孔部から引っ込むように手組立体20の先端から後退される。
【0024】
以上のように操作部材6を操作することでよりリアルな猫の手招き動作を楽しむことができる。また、操作部材6を高速で操作すると猫パンチの様子も再現できる。
【0025】
ここで、爪部材12の複数の爪部12aの本数は任意に設定でき、例えば鳥類の場合には2本、熊の場合には5本に設定することでリアルに構成できる。以下の説明では猫の前足から出没する爪の本数は4本であることから猫前足に模した場合について述べる。
【0026】
図2は、図1の構成についてアイソメトリック図法で図示した立体分解図である。本図において、既に説明済みの構成または部品については同様の符号を附して説明を割愛すると、上記のように2分割されて構成される基部材2、2が樹脂成型されて準備される。
この基部材2の一方には、操作部材6の基部6aに穿設された貫通孔6bを相通することで操作部材6を回動軸支するスタッド部3aが把持部3の内側から延設されている。また、基部材2の一方には、基部材2の他方(手前側で一部を破断して示した)に形成された5つの孔部2cに夫々相通されるセルフタッピングネジ16を螺合する螺合部2bが同数形成されている。
【0027】
また、各基部材2、2の端部には金属製の第1ピン部材9を相通するための孔部2a、2aが夫々形成されている。
【0028】
一方、操作部材6の基部6aには溝部を介して孔部6c、6dが図示のように形成されており、この溝部に腱部材14の端部14aをセットした後に、金属製のピン部材13を各孔部6c、6dに対して相通させることで端部14aの孔部14bをピン部材13で軸支することにより、腱部材14の一方を操作部材6に対して接続するように構成されている。
【0029】
この腱部材14は、適度な弾性変形が可能でありかつまた十分な引張り抗力を有する例えばナイロン樹脂製とすると良い。この腱部材14は、図中において中間部位を破断して示しており、端部14cの孔部に金属製のピン部材15を圧入し、ピン部材15の両端を手組立体20の手部品30のU溝部30f、30f中に図示のように挿入することで、腱部材14の他方を接続するように構成されている。
【0030】
次に、関節組立体10は、図示のように樹脂成型される形状部材21から構成されており、この形状部材21の手前側の片側壁面に穿設された孔部21aに上記の第1ピン部材9を通過させた後に、ステンレス製のトーションバネ25の輪部を相通した後に、形状部材21の奥側の片側壁面に穿設された孔部21aに第1ピン部材9を通過させ、基部材2の孔部2aに通すことで関節組立体10を回動可能にする。また、トーションバネ25のアーム部25aは、基部材2の内面に、またアーム部25bは、関節組立体10の内面側に位置するようにして、関節組立体10を常時図1に図示される初期位置に移動付勢するように構成されている。
【0031】
この形状部材21の両側面には、第1カム面22cを形成したカム部材22が夫々一体成型または別部材として固定されている。また、各カム部材22の下方面には中間部材28を2つのセルフタッピングネジ16で固定する螺合部21hが形成されている。
【0032】
形状部材21の天井部にはフック21kが形成されており、このフック21kに対して引張りコイルバネ38の端部38aを天井孔部21mから工具を入れることで引っ掛けるようにしている。
【0033】
この形状部材21には上記の第2ピン部材11を相通するための孔部21b、12bが穿設されるとともに、この孔部周りに第2カム面21cを形成している。また、形状部材21の孔部21b、21bに上記の第2ピン部材11を通過させた後に、ステンレス製のトーションバネ27の輪部を相通した後に、図示のように手部品30の孔部30aに第2ピン部材11を通過させることで関節組立体10に対して手部品30を回動可能にしている。また、トーションバネ27のアーム部27aは、形状部材21の内面に、またアーム部27bは、甲部品23の内面側に位置するようにして、手組立体20を常時図1に図示される初期位置に移動付勢するように構成されている。
【0034】
手部品30は、爪部材12を待機位置から突出位置に移動させるように手組立体内で揺動軸支される揺動カム部材35を支持する溝部30d、30dを形成している。この揺動カム部材35は軸体35aから延設される一端部35bが第2カム面21cに対して夫々摺接され、他端部35cが爪部材12の基部12bに対して摺接するように構成されている。
【0035】
一方、爪部材12はフック12kを基部12bの上方から延設するとともに、4本の爪部12aを一体成型している。この爪部材12は白色のナイロン樹脂製とするとともに、先端を丸くし、さらには大きな外力がかかると弾性変形により危険防止を図るように構成されている。
【0036】
手部品30にはこの爪部材12を案内する部屋30bと、各爪部12aを案内する溝部30kが形成されている。また、甲部品32には溝部32cが図示のように形成され、溝部30kと溝部32cとにより孔部が穿設されている。また、手部品30と甲部品32とを図示のように上下に合わせた後に、2本のセルフタッピングネジ16で固定し、爪部12aのみが出入りできるように構成されている。
【0037】
手部品30の孔部30a周り近傍には摺接面30cが、形状部材21の第1カム面22cに対応する位置に一対分形成されている。
【0038】
図3(a)は、図1、2に図示された爪進退式玩具1の操作前の状態を示した正面図、(b)は、爪進退式玩具1の操作後の状態を示した正面図である。
【0039】
本図において、既に説明済みの構成または部品については同様の符号を附して説明を割愛すると、操作部材6を操作する前の初期位置では、破線図示の腱部材14はピン12、15によって両端が保持されている。
【0040】
この後に、操作部材6を押圧把持すると、腱部材14に対して引張り力が作用するが、その途中部位を第1ピン部材9および第2ピン部材11の下方と形状部材21に固定された中間部材28の上方を通過させていることから、その張り力が手組立体の手部品30に伝達されることで図示のように手組立体が下方に回動する。これに伴い、関節組立体も下方に回動することとなる。
【0041】
最後に、図4(a)は、操作前の爪部材12の状態を示すために要部を破断して図示した動作説明のための正面図、(b)は、操作後の爪部材12を示すために要部を破断して図示した動作説明のための正面図である。
【0042】
本図において、既に説明済みの構成または部品については同様の符号を附して説明を割愛すると、図4(a)において、カム部材22のカム面22cから手部品30の摺動面30cは離間している。また、爪部材12は引張りコイルバネ38の引張り力により後退位置に位置するとともに、揺動カム部材35の他端部35cは爪部材12の基部12b上に当接している。一方、揺動カム部材35の軸体35aから延設される一端部35bは、形状部材21の第2カム面21c上に当接している。
【0043】
この状態から、操作部材が押圧操作されることで、腱部材14が上記のように引っ張られると、第1カム面22cに手部品30の摺接面30cが図示のように移動して、下方に回動し始める。腱部材14がさらに引っ張られると、形状部材21の第2カム面21cに当接した揺動カム部材35の一端部35bが矢印D6方向に移動されることで、他端部35cが爪部材12の基部12bを押し出す状態になる結果、爪部12aが上記のように突出される。
【0044】
また、操作を解除すると上記の各トーションバネの作用で初期位置に復帰する。
【図面の簡単な説明】
【0045】
【図1】(a)は本発明の一実施形態である爪進退式玩具1の操作前の状態を示した正面図、(b)は、爪進退式玩具1の操作後の状態を示した正面図である。
【図2】爪進退式玩具1の立体分解図である。
【図3】(a)は、図1、2に図示された爪進退式玩具1の操作前の状態を示した正面図、(b)は、爪進退式玩具1の操作後の状態を示した正面図である。
【図4】(a)は、操作前の爪部材12の状態を示すために要部を破断して図示した動作説明のための正面図、(b)は、操作後の爪部材12を示すために要部を破断して図示した動作説明のための正面図である。
【符号の説明】
【0046】
1 爪進退式玩具
2 基部材
3 把持部
4 溝部
5 環状部材
6 操作部材
7 スキンカバー
8 肉球
9 第1ピン部材
10 関節組立体
11 第2ピン部材
12 爪部材
13 ピン部材
14 腱部材
15 ピン部材
16 ネジ
20 手組立体
21 形状部材
22 カム部材
25 トーションバネ
27 トーションバネ
28 中間部材
30 手部品
32 甲部品
35 揺動カム部材
38 引張りコイルバネ
【技術分野】
【0001】
本発明は、爪進退式玩具に係り、操作部を操作することでよりリアルな動物の動作を任意に楽しむことのできる子供用玩具として好適な技術に関するものである。
【背景技術】
【0002】
動物を模した種々の玩具の内で、手足の簡単な動きを再現可能にした玩具が提案されている。具体的には、手を開放状態と把持状態に任意に設定するために腕部分に相当する基部の端部において回動自在に手部材を軸支し、基部と手部材の間にコイルバネ機構を設けておき、手の回動にともないコイルバネが屈曲して引張り力が無くなる状態と、コイルバネが直線状になり引張り力を発生する状態とに任意に設定することで、開放状態と把持状態に保持できるように構成されている。このように構成された手または足を動物玩具本体に固定することで、動物が小物を把持した状態を任意に再現可能にして楽しく遊べるようにしている。(特許文献1)。
【0003】
一方、動物玩具において、頭部、手足、尻尾のみを誇張して再現し、幼児などが任意に操作して動物に特徴的なユーモラスな動きを再現可能にした玩具も提案されている。
【特許文献1】実公昭55−14384号公報。
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の動物に特徴的なユーモラスな動きを再現可能にした玩具の内で、例えば猫の手のユーモラスな動きを再現可能にした玩具によれば、操作部の操作を行うことで手招きする動作を再現できるが、それ以上の動作は再現できない。
【0005】
したがって、本発明は上記の問題点に鑑みて成されたものであり、操作部を操作することでよりリアルな動物の動作を任意に楽しむことのできる爪進退式玩具とその使用方法の提供を目的としている。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明の爪進退式玩具によれば、回動操作される操作部を有する基部材と、前記基部材に対して関節組立体を介して軸支されるとともに、前記操作部の押圧操作により初期位置から回動位置に回動され、かつ前記操作部の押圧解除により前記回動位置から前記初期位置に回動されるように回動付勢される手組立体と、複数の爪部が前記手組立体の内部に位置する待機位置と、前記複数の爪部が前記手組立体の先端から突出する突出位置との間で移動され、かつ前記待機位置に移動付勢される爪部材と、前記手組立体の前記回動動作に連動して、前記爪部材を前記待機位置から前記突出位置に移動させるための連動手段と、を備えることを特徴としている。
【0007】
また、前記複数の爪部の本数は少なくとも2本以上、または4本、あるいは5本に設定されることを特徴としている。
【0008】
また、前記関節組立体は、形状部材と、前記基部材との間で前記軸支する第1ピン部材と、前記手組立体との間で前記軸支する第2ピン部材と、前記形状部材の側面に形成された第1カム面と、前記第2ピン部材周りに形成された第2カム面とから構成され、前記連動手段は、一端が前記操作部に接続され、他端が前記手組立体に接続されるとともに、前記第1ピン部材および前記第2ピン部材と前記形状部材に固定された中間部材との間を通過させることで、引張り力を前記手組立体に伝達可能にした腱部材と、前記第1カム面に対して摺接するように前記第2ピン部材周りに前記手組立体側に形成される摺接面と、一端部が前記第2カム面に対して摺接され、他端部が前記爪部材の基部に対して摺接することで、前記爪部材を前記待機位置から前記突出位置に移動させるように前記手組立体内で揺動軸支される揺動カム部材とから構成され、前記操作部が押圧操作されると、前記腱部材を介して前記引張り力が前記手組立体に伝達されることで、前記第1カム面に対して前記摺接面が当接して、前記手組立体が前記回動位置に向けて回動されることを特徴としている。
【0009】
また、前記操作部がさらに押圧操作されると、前記腱部材を介して前記引張り力が前記手組立体に伝達されるとともに、前記揺動カム部材の前記一端部が前記第2カム面に摺接されて前記揺動カム部材が揺動され、前記他端部が前記爪部材の基部に対して摺接することにより、前記爪部材が前記待機位置から前記突出位置に移動されることを特徴としている。
【0010】
また、前記第1カム面は前記形状部材の両側面に一体形成され、前記手組立体側に形成される前記摺接面は前記第1カム面に対応する位置に一対分形成されるとともに、前記第2カム面は前記形状部材の両端部に一体形成され、前記一端部は前記第2カム面に対応する位置に一対分が一体形成され、さらに前記他端部も一対分が一体形成されることを特徴としている。
【0011】
また、前記手組立体に前記複数の爪部が突出する孔部を穿設し、前記手組立体と、前記関節組立体と、前記基部材の表面全体とを覆うとともに、その開口端が前記基部材に形成された溝部に嵌る環状部材を用いて固定されるように有底筒状に形成されるカバー部材を備えたことを特徴としている。
【0012】
また、前記カバー部材に対してシリコンラバー製を含む肉球を、縫合を含む方法で固定したことを特徴としている。
【0013】
そして、回動操作される操作部を有する基部材に対して関節組立体を介して軸支されるとともに、操作部の押圧操作により初期位置から回動位置に回動され、かつ前記操作部の押圧解除操作により前記回動位置から前記初期位置に回動されるように回動付勢される手組立体と、複数の爪部が前記手組立体の内部に位置する待機位置と、前記複数の爪部が前記手組立体の先端から突出する突出位置との間で移動され、かつ前記待機位置に移動付勢される爪部材と、前記手組立体の前記回動動作に連動して、前記爪部材を前記待機位置から前記突出位置に移動させるための連動手段と、を備えた爪進退式玩具の使用方法であって、前記操作部を押圧操作することにより、前記関節組立体を介して前記手組立体が初期位置から回動位置に回動され、これに連動して複数の爪部が前記手組立体の先端から突出され、前記操作部を押圧解除操作することにより、前記関節組立体を介して前記手組立体が回動位置から初期位置に回動され、これに連動して複数の爪部を前記手組立体の先端から後退させることを特徴としている。
【発明の効果】
【0014】
本発明によれば、操作部材を押圧操作することで関節組立体を介して手組立体が初期位置から回動位置に回動され、これに連動して複数の爪部が手組立体の先端から突出され、また操作部を押圧解除することで、関節組立体を介して手組立体が回動位置から初期位置に回動され、これに連動して複数の爪部を手組立体の先端から後退させることができる新規な構造を備えた爪進退式玩具およびその使用方法を提供することができる。
【発明を実施するための最良の形態】
【0015】
以下に、本発明の好適な一実施形態について添付の各図面を参照して述べる。
【0016】
ここで、本発明は様々な修正と変更が可能であり、その内の特定の事例が図面に図示されており、以下に詳細に記述されることになるが、これらに限定されず請求の範囲に規定された範囲で種々の構成が可能であることは言うまでもなく、後述する玩具用途以外にも全ての爪進退式玩具に適用可能である。
【0017】
先ず、図1(a)は本発明の一実施形態である爪進退式玩具1の操作前の状態を示した正面図、(b)は、爪進退式玩具1の操作後の状態を示した正面図である。
【0018】
図1において、この爪進退式玩具1は、動物として猫の手を模しているが、これに限定されず後述の爪の出し入れを行う全ての動物に適用可能である。この爪進退式玩具1は、子供が使用されることを前提としており、全長寸法が約15cmの全樹脂製(ただし、金属製ピン、スキンカバーなどを除く)であり、さらにボールチェーンMを設けることで、例えばキーホルダーとしても使用できるように構成されている。また、鈴Kをさらに吊り下げることで猫を強調できるようにしている。
【0019】
図1(a)において、この爪進退式玩具1は、後述するように回動操作される操作部材6を有する基部材2を設けている。この基部材2は、把持部3と溝部4とを一体成型しており、後述のように2分割されて構成されることで部品を内蔵可能にしている。この基部材2に対して第1ピン部材9を介して関節組立体10が軸支される。
【0020】
この関節組立体10は第2ピン部材11を介して手組立体20を軸支している。この手組立体20には爪部材12が内蔵されており、図示の待機位置から図1(b)に図示する突出位置に移動させるように構成されている。
【0021】
一方、底部に爪部材12の複数の爪部12aを突出する孔部を穿設し、かつ手組立体20と関節組立体10と基部材2の表面を覆う猫のスキンカバー7が図中の一点鎖線で示すように設けられている。このスキンカバー7は、起毛布から縫製されており、その開口端が基部材2に形成された溝部4に位置された状態で環状部材5を図中の矢印方向に移動および圧入することで固定される。また、このスキンカバー7に対してシリコンラバー製を含む肉球8を、縫合を含む方法で固定することでよりリアル感を演出している。
【0022】
次に、図1(b)をさらに参照して、以上のように構成される爪進退式玩具1の操作部材6を把持部3との間で把持して矢印D1方向に押圧操作すると、関節組立体10と手組立体20とが矢印D2方向に初期位置から回動位置に回動され、手組立体20に内蔵されていた爪部材12の爪部12aが後述する連動機構の作用によって待機位置から突出位置に移動されることで矢印D3方向に移動されて、スキンカバー7の孔部を介して外部に突出する。
【0023】
また、操作部材6の押圧を解除すると、図1(a)に図示したように関節組立体10を介して手組立体20が回動位置から初期位置に回動されるとともに、これに連動して複数の爪部12aがスキンカバー7の孔部から引っ込むように手組立体20の先端から後退される。
【0024】
以上のように操作部材6を操作することでよりリアルな猫の手招き動作を楽しむことができる。また、操作部材6を高速で操作すると猫パンチの様子も再現できる。
【0025】
ここで、爪部材12の複数の爪部12aの本数は任意に設定でき、例えば鳥類の場合には2本、熊の場合には5本に設定することでリアルに構成できる。以下の説明では猫の前足から出没する爪の本数は4本であることから猫前足に模した場合について述べる。
【0026】
図2は、図1の構成についてアイソメトリック図法で図示した立体分解図である。本図において、既に説明済みの構成または部品については同様の符号を附して説明を割愛すると、上記のように2分割されて構成される基部材2、2が樹脂成型されて準備される。
この基部材2の一方には、操作部材6の基部6aに穿設された貫通孔6bを相通することで操作部材6を回動軸支するスタッド部3aが把持部3の内側から延設されている。また、基部材2の一方には、基部材2の他方(手前側で一部を破断して示した)に形成された5つの孔部2cに夫々相通されるセルフタッピングネジ16を螺合する螺合部2bが同数形成されている。
【0027】
また、各基部材2、2の端部には金属製の第1ピン部材9を相通するための孔部2a、2aが夫々形成されている。
【0028】
一方、操作部材6の基部6aには溝部を介して孔部6c、6dが図示のように形成されており、この溝部に腱部材14の端部14aをセットした後に、金属製のピン部材13を各孔部6c、6dに対して相通させることで端部14aの孔部14bをピン部材13で軸支することにより、腱部材14の一方を操作部材6に対して接続するように構成されている。
【0029】
この腱部材14は、適度な弾性変形が可能でありかつまた十分な引張り抗力を有する例えばナイロン樹脂製とすると良い。この腱部材14は、図中において中間部位を破断して示しており、端部14cの孔部に金属製のピン部材15を圧入し、ピン部材15の両端を手組立体20の手部品30のU溝部30f、30f中に図示のように挿入することで、腱部材14の他方を接続するように構成されている。
【0030】
次に、関節組立体10は、図示のように樹脂成型される形状部材21から構成されており、この形状部材21の手前側の片側壁面に穿設された孔部21aに上記の第1ピン部材9を通過させた後に、ステンレス製のトーションバネ25の輪部を相通した後に、形状部材21の奥側の片側壁面に穿設された孔部21aに第1ピン部材9を通過させ、基部材2の孔部2aに通すことで関節組立体10を回動可能にする。また、トーションバネ25のアーム部25aは、基部材2の内面に、またアーム部25bは、関節組立体10の内面側に位置するようにして、関節組立体10を常時図1に図示される初期位置に移動付勢するように構成されている。
【0031】
この形状部材21の両側面には、第1カム面22cを形成したカム部材22が夫々一体成型または別部材として固定されている。また、各カム部材22の下方面には中間部材28を2つのセルフタッピングネジ16で固定する螺合部21hが形成されている。
【0032】
形状部材21の天井部にはフック21kが形成されており、このフック21kに対して引張りコイルバネ38の端部38aを天井孔部21mから工具を入れることで引っ掛けるようにしている。
【0033】
この形状部材21には上記の第2ピン部材11を相通するための孔部21b、12bが穿設されるとともに、この孔部周りに第2カム面21cを形成している。また、形状部材21の孔部21b、21bに上記の第2ピン部材11を通過させた後に、ステンレス製のトーションバネ27の輪部を相通した後に、図示のように手部品30の孔部30aに第2ピン部材11を通過させることで関節組立体10に対して手部品30を回動可能にしている。また、トーションバネ27のアーム部27aは、形状部材21の内面に、またアーム部27bは、甲部品23の内面側に位置するようにして、手組立体20を常時図1に図示される初期位置に移動付勢するように構成されている。
【0034】
手部品30は、爪部材12を待機位置から突出位置に移動させるように手組立体内で揺動軸支される揺動カム部材35を支持する溝部30d、30dを形成している。この揺動カム部材35は軸体35aから延設される一端部35bが第2カム面21cに対して夫々摺接され、他端部35cが爪部材12の基部12bに対して摺接するように構成されている。
【0035】
一方、爪部材12はフック12kを基部12bの上方から延設するとともに、4本の爪部12aを一体成型している。この爪部材12は白色のナイロン樹脂製とするとともに、先端を丸くし、さらには大きな外力がかかると弾性変形により危険防止を図るように構成されている。
【0036】
手部品30にはこの爪部材12を案内する部屋30bと、各爪部12aを案内する溝部30kが形成されている。また、甲部品32には溝部32cが図示のように形成され、溝部30kと溝部32cとにより孔部が穿設されている。また、手部品30と甲部品32とを図示のように上下に合わせた後に、2本のセルフタッピングネジ16で固定し、爪部12aのみが出入りできるように構成されている。
【0037】
手部品30の孔部30a周り近傍には摺接面30cが、形状部材21の第1カム面22cに対応する位置に一対分形成されている。
【0038】
図3(a)は、図1、2に図示された爪進退式玩具1の操作前の状態を示した正面図、(b)は、爪進退式玩具1の操作後の状態を示した正面図である。
【0039】
本図において、既に説明済みの構成または部品については同様の符号を附して説明を割愛すると、操作部材6を操作する前の初期位置では、破線図示の腱部材14はピン12、15によって両端が保持されている。
【0040】
この後に、操作部材6を押圧把持すると、腱部材14に対して引張り力が作用するが、その途中部位を第1ピン部材9および第2ピン部材11の下方と形状部材21に固定された中間部材28の上方を通過させていることから、その張り力が手組立体の手部品30に伝達されることで図示のように手組立体が下方に回動する。これに伴い、関節組立体も下方に回動することとなる。
【0041】
最後に、図4(a)は、操作前の爪部材12の状態を示すために要部を破断して図示した動作説明のための正面図、(b)は、操作後の爪部材12を示すために要部を破断して図示した動作説明のための正面図である。
【0042】
本図において、既に説明済みの構成または部品については同様の符号を附して説明を割愛すると、図4(a)において、カム部材22のカム面22cから手部品30の摺動面30cは離間している。また、爪部材12は引張りコイルバネ38の引張り力により後退位置に位置するとともに、揺動カム部材35の他端部35cは爪部材12の基部12b上に当接している。一方、揺動カム部材35の軸体35aから延設される一端部35bは、形状部材21の第2カム面21c上に当接している。
【0043】
この状態から、操作部材が押圧操作されることで、腱部材14が上記のように引っ張られると、第1カム面22cに手部品30の摺接面30cが図示のように移動して、下方に回動し始める。腱部材14がさらに引っ張られると、形状部材21の第2カム面21cに当接した揺動カム部材35の一端部35bが矢印D6方向に移動されることで、他端部35cが爪部材12の基部12bを押し出す状態になる結果、爪部12aが上記のように突出される。
【0044】
また、操作を解除すると上記の各トーションバネの作用で初期位置に復帰する。
【図面の簡単な説明】
【0045】
【図1】(a)は本発明の一実施形態である爪進退式玩具1の操作前の状態を示した正面図、(b)は、爪進退式玩具1の操作後の状態を示した正面図である。
【図2】爪進退式玩具1の立体分解図である。
【図3】(a)は、図1、2に図示された爪進退式玩具1の操作前の状態を示した正面図、(b)は、爪進退式玩具1の操作後の状態を示した正面図である。
【図4】(a)は、操作前の爪部材12の状態を示すために要部を破断して図示した動作説明のための正面図、(b)は、操作後の爪部材12を示すために要部を破断して図示した動作説明のための正面図である。
【符号の説明】
【0046】
1 爪進退式玩具
2 基部材
3 把持部
4 溝部
5 環状部材
6 操作部材
7 スキンカバー
8 肉球
9 第1ピン部材
10 関節組立体
11 第2ピン部材
12 爪部材
13 ピン部材
14 腱部材
15 ピン部材
16 ネジ
20 手組立体
21 形状部材
22 カム部材
25 トーションバネ
27 トーションバネ
28 中間部材
30 手部品
32 甲部品
35 揺動カム部材
38 引張りコイルバネ
【特許請求の範囲】
【請求項1】
回動操作される操作部を有する基部材と、
前記基部材に対して関節組立体を介して軸支されるとともに、前記操作部の押圧操作により初期位置から回動位置に回動され、かつ前記操作部の押圧解除により前記回動位置から前記初期位置に回動されるように回動付勢される手組立体と、
複数の爪部が前記手組立体の内部に位置する待機位置と、前記複数の爪部が前記手組立体の先端から突出する突出位置との間で移動され、かつ前記待機位置に移動付勢される爪部材と、
前記手組立体の前記回動動作に連動して、前記爪部材を前記待機位置から前記突出位置に移動させるための連動手段と、
を備えることを特徴とする爪進退式玩具。
【請求項2】
前記複数の爪部の本数は少なくとも2本以上、または4本、あるいは5本に設定されることを特徴とする請求項1に記載の爪進退式玩具。
【請求項3】
前記関節組立体は、
形状部材と、
前記基部材との間で前記軸支する第1ピン部材と、
前記手組立体との間で前記軸支する第2ピン部材と、
前記形状部材の側面に形成された第1カム面と、
前記第2ピン部材周りに形成された第2カム面とから構成され、
前記連動手段は、
一端が前記操作部に接続され、他端が前記手組立体に接続されるとともに、前記第1ピン部材および前記第2ピン部材と前記形状部材に固定された中間部材との間を通過させることで、引張り力を前記手組立体に伝達可能にした腱部材と、
前記第1カム面に対して摺接するように前記第2ピン部材周りに前記手組立体側に形成される摺接面と、
一端部が前記第2カム面に対して摺接され、他端部が前記爪部材の基部に対して摺接することで、前記爪部材を前記待機位置から前記突出位置に移動させるように前記手組立体内で揺動軸支される揺動カム部材とから構成され、
前記操作部が押圧操作されると、前記腱部材を介して前記引張り力が前記手組立体に伝達されることで、前記第1カム面に対して前記摺接面が当接して、前記手組立体が前記回動位置に向けて回動されることを特徴とする請求項1または2に記載の爪進退式玩具。
【請求項4】
前記操作部がさらに押圧操作されると、前記腱部材を介して前記引張り力が前記手組立体に伝達されるとともに、前記揺動カム部材の前記一端部が前記第2カム面に摺接されて前記揺動カム部材が揺動され、前記他端部が前記爪部材の基部に対して摺接することで、前記爪部材が前記待機位置から前記突出位置に移動されることを特徴とする請求項3に記載の爪進退式玩具。
【請求項5】
前記第1カム面は前記形状部材の両側面に一体形成され、前記手組立体側に形成される前記摺接面は前記第1カム面に対応する位置に一対分形成されるとともに、
前記第2カム面は前記形状部材の両端部に一体形成され、前記一端部は前記第2カム面に対応する位置に一対分が一体形成され、さらに前記他端部も一対分が一体形成されることを特徴とする請求項3または4に記載の爪進退式玩具。
【請求項6】
前記手組立体に前記複数の爪部が突出する孔部を穿設し、前記手組立体と、前記関節組立体と、前記基部材の表面全体とを覆うとともに、その開口端が前記基部材に形成された溝部に嵌る環状部材を用いて固定されるように有底筒状に形成されるカバー部材を備えたことを特徴とする請求項1乃至5のいずれか1項に記載の爪進退式玩具。
【請求項7】
前記カバー部材に対してシリコンラバー製を含む肉球を、縫合を含む方法で固定したことを特徴とする請求項1乃至6のいずれか1項に記載の爪進退式玩具。
【請求項8】
回動操作される操作部を有する基部材に対して関節組立体を介して軸支されるとともに、操作部の押圧操作により初期位置から回動位置に回動され、かつ前記操作部の押圧解除操作により前記回動位置から前記初期位置に回動されるように回動付勢される手組立体と、複数の爪部が前記手組立体の内部に位置する待機位置と、前記複数の爪部が前記手組立体の先端から突出する突出位置との間で移動され、かつ前記待機位置に移動付勢される爪部材と、前記手組立体の前記回動動作に連動して、前記爪部材を前記待機位置から前記突出位置に移動させるための連動手段と、を備えた爪進退式玩具の使用方法であって、
前記操作部を押圧操作することにより、前記関節組立体を介して前記手組立体が初期位置から回動位置に回動され、これに連動して複数の爪部が前記手組立体の先端から突出され、前記操作部を押圧解除操作することにより、前記関節組立体を介して前記手組立体が回動位置から初期位置に回動され、これに連動して複数の爪部を前記手組立体の先端から後退させることを特徴とする爪進退式玩具の使用方法。
【請求項1】
回動操作される操作部を有する基部材と、
前記基部材に対して関節組立体を介して軸支されるとともに、前記操作部の押圧操作により初期位置から回動位置に回動され、かつ前記操作部の押圧解除により前記回動位置から前記初期位置に回動されるように回動付勢される手組立体と、
複数の爪部が前記手組立体の内部に位置する待機位置と、前記複数の爪部が前記手組立体の先端から突出する突出位置との間で移動され、かつ前記待機位置に移動付勢される爪部材と、
前記手組立体の前記回動動作に連動して、前記爪部材を前記待機位置から前記突出位置に移動させるための連動手段と、
を備えることを特徴とする爪進退式玩具。
【請求項2】
前記複数の爪部の本数は少なくとも2本以上、または4本、あるいは5本に設定されることを特徴とする請求項1に記載の爪進退式玩具。
【請求項3】
前記関節組立体は、
形状部材と、
前記基部材との間で前記軸支する第1ピン部材と、
前記手組立体との間で前記軸支する第2ピン部材と、
前記形状部材の側面に形成された第1カム面と、
前記第2ピン部材周りに形成された第2カム面とから構成され、
前記連動手段は、
一端が前記操作部に接続され、他端が前記手組立体に接続されるとともに、前記第1ピン部材および前記第2ピン部材と前記形状部材に固定された中間部材との間を通過させることで、引張り力を前記手組立体に伝達可能にした腱部材と、
前記第1カム面に対して摺接するように前記第2ピン部材周りに前記手組立体側に形成される摺接面と、
一端部が前記第2カム面に対して摺接され、他端部が前記爪部材の基部に対して摺接することで、前記爪部材を前記待機位置から前記突出位置に移動させるように前記手組立体内で揺動軸支される揺動カム部材とから構成され、
前記操作部が押圧操作されると、前記腱部材を介して前記引張り力が前記手組立体に伝達されることで、前記第1カム面に対して前記摺接面が当接して、前記手組立体が前記回動位置に向けて回動されることを特徴とする請求項1または2に記載の爪進退式玩具。
【請求項4】
前記操作部がさらに押圧操作されると、前記腱部材を介して前記引張り力が前記手組立体に伝達されるとともに、前記揺動カム部材の前記一端部が前記第2カム面に摺接されて前記揺動カム部材が揺動され、前記他端部が前記爪部材の基部に対して摺接することで、前記爪部材が前記待機位置から前記突出位置に移動されることを特徴とする請求項3に記載の爪進退式玩具。
【請求項5】
前記第1カム面は前記形状部材の両側面に一体形成され、前記手組立体側に形成される前記摺接面は前記第1カム面に対応する位置に一対分形成されるとともに、
前記第2カム面は前記形状部材の両端部に一体形成され、前記一端部は前記第2カム面に対応する位置に一対分が一体形成され、さらに前記他端部も一対分が一体形成されることを特徴とする請求項3または4に記載の爪進退式玩具。
【請求項6】
前記手組立体に前記複数の爪部が突出する孔部を穿設し、前記手組立体と、前記関節組立体と、前記基部材の表面全体とを覆うとともに、その開口端が前記基部材に形成された溝部に嵌る環状部材を用いて固定されるように有底筒状に形成されるカバー部材を備えたことを特徴とする請求項1乃至5のいずれか1項に記載の爪進退式玩具。
【請求項7】
前記カバー部材に対してシリコンラバー製を含む肉球を、縫合を含む方法で固定したことを特徴とする請求項1乃至6のいずれか1項に記載の爪進退式玩具。
【請求項8】
回動操作される操作部を有する基部材に対して関節組立体を介して軸支されるとともに、操作部の押圧操作により初期位置から回動位置に回動され、かつ前記操作部の押圧解除操作により前記回動位置から前記初期位置に回動されるように回動付勢される手組立体と、複数の爪部が前記手組立体の内部に位置する待機位置と、前記複数の爪部が前記手組立体の先端から突出する突出位置との間で移動され、かつ前記待機位置に移動付勢される爪部材と、前記手組立体の前記回動動作に連動して、前記爪部材を前記待機位置から前記突出位置に移動させるための連動手段と、を備えた爪進退式玩具の使用方法であって、
前記操作部を押圧操作することにより、前記関節組立体を介して前記手組立体が初期位置から回動位置に回動され、これに連動して複数の爪部が前記手組立体の先端から突出され、前記操作部を押圧解除操作することにより、前記関節組立体を介して前記手組立体が回動位置から初期位置に回動され、これに連動して複数の爪部を前記手組立体の先端から後退させることを特徴とする爪進退式玩具の使用方法。
【図1】



【図2】

【図3】
【図4】

【図2】
【図3】
【図4】
【公開番号】特開2007−202971(P2007−202971A)
【公開日】平成19年8月16日(2007.8.16)
【国際特許分類】
【出願番号】特願2006−28654(P2006−28654)
【出願日】平成18年2月6日(2006.2.6)
【特許番号】特許第3834330号(P3834330)
【特許公報発行日】平成18年10月18日(2006.10.18)
【出願人】(000135748)株式会社バンダイ (246)
【Fターム(参考)】
【公開日】平成19年8月16日(2007.8.16)
【国際特許分類】
【出願日】平成18年2月6日(2006.2.6)
【特許番号】特許第3834330号(P3834330)
【特許公報発行日】平成18年10月18日(2006.10.18)
【出願人】(000135748)株式会社バンダイ (246)
【Fターム(参考)】
[ Back to top ]