
片荷判定装置
【課題】簡素な構成で走行中の車両の片荷状態を正確に判定し得る片荷判定装置を提供する。
【解決手段】片荷判定装置1は、車両20の車幅方向の加速度Gyを検出するGセンサ2(横加速度検出手段)と、車両20のヨーレイトγを検出するヨーレイトセンサ3(ヨーレイト検出手段)と、車両20の車速Vを検出する車速センサ4(車速検出手段)と、ECU6とを備えており、ECU6は、車両20の加速中又は減速中の相異なる複数の車速Vにおけるヨーレイトγの絶対値が全て所定の閾ヨーレートγk以下である場合に、車両20が略平坦な路面を略直進していることを判定するヨーレイト判定部(走行状態判定手段)と、ヨーレイト判定部により車両20が略平坦な路面を略直進していることが判定されている場合に、横加速度Gyに基づいて車両20が片荷状態であることを判定する片荷判定部(片荷判定手段)とを備えている。
【解決手段】片荷判定装置1は、車両20の車幅方向の加速度Gyを検出するGセンサ2(横加速度検出手段)と、車両20のヨーレイトγを検出するヨーレイトセンサ3(ヨーレイト検出手段)と、車両20の車速Vを検出する車速センサ4(車速検出手段)と、ECU6とを備えており、ECU6は、車両20の加速中又は減速中の相異なる複数の車速Vにおけるヨーレイトγの絶対値が全て所定の閾ヨーレートγk以下である場合に、車両20が略平坦な路面を略直進していることを判定するヨーレイト判定部(走行状態判定手段)と、ヨーレイト判定部により車両20が略平坦な路面を略直進していることが判定されている場合に、横加速度Gyに基づいて車両20が片荷状態であることを判定する片荷判定部(片荷判定手段)とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に積載された積荷が車幅方向に偏っている片荷状態を判定する片荷判定装置に関するものである。
【背景技術】
【0002】
一般に、走行中の車両が急旋回すると、あるいはコーナにオーバスピードで進入すると、車両に過度の遠心力が加わるため、車両がロールして横転するおそれがある。そして、車両に積載された積荷が車幅方向に偏っている片荷状態で車両が走行しているときには、車体が車幅方向に常にロールしている状態となっているため、片荷状態になっていない場合に比べて、さらに車両が横転しやすくなる。
【0003】
このような走行中の車両の横転を回避するために、例えば、特許文献1には、車両の片荷状態を判定する片荷判定装置を備えるロールオーバ防止装置が開示されている。特許文献1に記載のロールオーバ防止装置を装備した車両を図9に示す。
【0004】
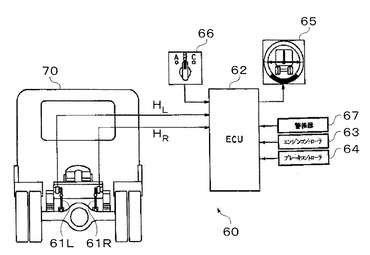
図9に示すように、ロールオーバ防止装置60は、車両70(例えば、セミトラクタ)に装備される。ロールオーバ防止装置60は、旋回時における車両70のロール状態を検知して運転者に表示警告するもので、車高センサ61L、61Rと、ECU62(電子コントロールユニット)と、エンジンコントローラ63と、ブレーキコントローラ64と、ロールインジケータ65と、警報タイミング選択スイッチ66と、警報器67とを備えている。
【0005】
ロールオーバ防止装置60は、ECU62において車両70の横転危険性を判定し、この判定結果に基づいて、エンジンコントローラ63を介して燃料供給量を減少させると共に、ブレーキコントローラ64を介してブレーキを作動させる。これにより、車速が低下して、旋回中の車両70に発生する遠心力が低下してロールが小さくなり、車両70の横転を抑制することができる。
【0006】
ここで、ECU62による車両70の横転危険性の判定には、車両70の片荷状態によるロールの程度が反映されている。車両70のロール角度は、車高センサ61Lが検出する左側の車高HL、車高センサ61Rが検出する右側の車高HR、及び車高センサ61L、61Rの取付間隔を用いて幾何学的に算出することができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2002−166745号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述した特許文献1に記載のロールオーバ防止装置60は、車両70のロール角度を算出するために、車高センサ61L、61Rを備えている。この車高センサ61L、61Rを用いることによって、車両70が傾斜路面(横断勾配が大きい路面)を走行している場合であっても、車両70のロール角度を算出することが可能となっている。
【0009】
ところが、車高センサ61L、61Rは、標準的なロールオーバ防止装置や、標準的な横滑り防止装置(ESC)には備わっていないロール角度を算出するための専用のセンサである。したがって、特許文献1に記載のロールオーバ防止装置60は、車高センサ61L、61Rを備えていることによりコストがかかるという問題がある。
【0010】
本発明は、上記実情に鑑みてなされたものであり、簡素な構成で走行中の車両の片荷状態を正確に判定し得る片荷判定装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記の課題を解決するため、請求項1に係る片荷判定装置の構成上の特徴は、車両に積載された積荷が車幅方向に偏っている片荷状態を判定する片荷判定装置において、前記車両の車幅方向の加速度である横加速度を検出する横加速度検出手段と、前記車両が略平坦な路面を略直進していることを判定する走行状態判定手段と、前記走行状態判定手段により前記車両が略平坦な路面を略直進していることが判定されている場合に、前記横加速度に基づいて前記車両が片荷状態であることを判定する片荷判定手段と、を備えていることである。
【0012】
請求項2に係る発明の構成上の特徴は、請求項1に記載の片荷判定装置において、前記車両のヨーレイトを検出するヨーレイト検出手段と、前記車両の車速を検出する車速検出手段と、を備え、前記走行状態判定手段は、前記車速検出手段により検出された車速及び前記ヨーレイト検出手段により検出されたヨーレイトに基づいて、前記車両の加速中又は減速中の相異なる複数の車速におけるヨーレイトの絶対値が全て所定の閾ヨーレイト以下である場合に、該車両が略平坦な路面を略直進していることを判定することである。
【0013】
請求項3に係る発明の構成上の特徴は、請求項1又は2に記載の片荷判定装置において、前記車両の操舵角を検出する舵角検出手段と、前記車両の車速を検出する車速検出手段と、を備え、前記走行状態判定手段は、前記車速検出手段により検出された車速及び前記舵角検出手段により検出された操舵角に基づいて、前記車両の加速中又は減速中の相異なる複数の車速における操舵角の絶対値が全て所定の閾操舵角以下である場合に、該車両が略平坦な路面を略直進していることを判定することである。
【0014】
請求項4に係る発明の構成上の特徴は、請求項1から3のうちのいずれか一項に記載の片荷判定装置において、前記片荷判定手段は、前記横加速度検出手段により検出された横加速度が所定の閾横加速度以上である場合に、前記車両が片荷状態であることを判定することである。
【0015】
請求項5に係る発明の構成上の特徴は、請求項1から4のうちのいずれか一項に記載の片荷判定装置において、前記片荷判定手段は、前記横加速度検出手段により検出された横加速度が大きいほど、前記車両に積載された積荷の車幅方向の偏りが大きいことを判定することである。
【0016】
請求項6に係る発明の構成上の特徴は、請求項1から5のうちのいずれか一項に記載の片荷判定装置において、前記車両のヨーレイトを検出するヨーレイト検出手段と、前記車両の車速を検出する車速検出手段と、前記ヨーレイト検出手段により検出されたヨーレイト及び前記車速検出手段により検出された車速に基づいて、該ヨーレイト及び該車速の積を、遠心加速度として算出する遠心加速度算出手段と、前記横加速度検出手段により検出された横加速度及び前記遠心加速度算出手段により算出された遠心加速度に基づいて、前記横加速度と前記遠心加速度との差を、横加速度差として算出する横加速度差算出手段と、を備え、前記片荷判定手段は、前記横加速度差が所定の閾横加速度差以上である場合に、前記車両が片荷状態であることを判定することである。
【0017】
請求項7に係る発明の構成上の特徴は、請求項1から6のうちのいずれか一項に記載の片荷判定装置において、前記車両のヨーレイトを検出するヨーレイト検出手段と、前記車両の車速を検出する車速検出手段と、前記ヨーレイト検出手段により検出されたヨーレイト及び前記車速検出手段により検出された車速に基づいて、該ヨーレイト及び該車速の積を、遠心加速度として算出する遠心加速度算出手段と、前記横加速度検出手段により検出された横加速度及び前記遠心加速度算出手段により算出された遠心加速度に基づいて、前記横加速度と前記遠心加速度との差を、横加速度差として算出する横加速度差算出手段と、を備え、前記片荷判定手段は、前記横加速度差が大きいほど、前記車両に積載された積荷の車幅方向の偏りが大きいことを判定することである。
【発明の効果】
【0018】
車両が片荷状態である場合、車両が車幅方向に傾き、重力により車幅方向の加速度である横加速度が生じる。そのため、横加速度に基づいて車両が片荷状態であるか否かを判定することが可能である。多くの場合、車両には、横Gセンサなどの横加速度検出手段が搭載されているため、請求項1に係る発明のように、横加速度に基づいて車両の片荷状態を判定することにより、当該車両に専用の検出手段(例えば、特許文献1に記載のロールオーバ防止装置60に備わる車高センサ61L、61R)を搭載することなく、片荷判定装置を簡素に構成することができる。
【0019】
ところで、車両が片荷状態である場合に加え、同車両が傾斜路面(横断勾配が大きい路面)を走行している場合にも、車両が車幅方向に傾き、この車幅方向の傾きに起因する横加速度が生じる。また、車両の旋回中にも、当該車両に加わる遠心力により横加速度が生じる。すなわち、上記横加速度に基づく片荷判定では、車両の傾斜路面走行に起因する判定誤差や、車両の旋回に起因する判定誤差が考えられる。
【0020】
この点、請求項1に係る発明においては、走行状態判定手段により車両が略平坦な路面を略直進していることが判定されている場合に、横加速度に基づいて車両が片荷状態であることを判定するようにしているため、走行中の車両の片荷状態を正確に判定することができる。要するに、請求項1に係る発明によれば、簡素な構成で走行中の車両の片荷状態を正確に判定することができる。
【0021】
車両の旋回時に車速が変化すると、旋回により当該車両に加わる遠心力が変化することによりヨーレイトが変化する。一方、車両が傾斜路面を直進している場合、上述した車両の車幅方向の傾きに起因する重力による横加速度を打ち消すために、操舵による規範ヨーレイトが生じている。ここで、規範ヨーレイトは、操舵角及び車速に相関する。そのため、車両が傾斜路面を走行している場合に車速が変化すると、規範ヨーレイトが変化し、ひいては車両のヨーレイトが変化する。
【0022】
よって、請求項2に係る発明のように、車両の加速中又は減速中の相異なる複数の車速におけるヨーレイトの絶対値が全て所定の閾ヨーレイト以下である場合に、車両が略平坦な路面を略直進していると判定することができる。
【0023】
多くの場合、車両には、ヨーレイトセンサなどのヨーレイト検出手段や車速センサなどの車速検出手段が搭載されているため、上述の如くヨーレイトに基づいて車両の走行状態を判定することにより、車両の走行状態を判定する専用の検出手段を新たに車両に搭載することなく、走行状態判定手段を簡素に構成することができる。
【0024】
車両が旋回している場合には、旋回により当該車両に加わる遠心力を打ち消すために、また、車両が傾斜路面を直進している場合には、車両の車幅方向の傾きに起因する重力による横加速度を打ち消すために、規範ヨーレイトが生じている。上述したように、規範ヨーレイトは、操舵角及び車速に相関する。そのため、車速が変化すると、規範ヨーレイトが変化し、これを補償すべく操舵がなされて操舵角が変化する。
【0025】
よって、請求項3に係る発明のように、車両の加速中又は減速中の相異なる複数の車速における操舵角の絶対値が全て所定の閾操舵角以下である場合に、車両が略平坦な路面を略直進していると判定することができる。
【0026】
多くの場合、車両には、舵角センサなどの舵角検出手段や車速センサなどの車速検出手段が搭載されているため、上述の如く操舵角に基づいて車両の走行状態を判定することにより、車両の走行状態を判定する専用の検出手段を新たに車両に搭載することなく、走行状態判定手段を簡素に構成することができる。
【0027】
片荷状態では車両が車幅方向に傾くため、横加速度が大きくなる。ここで、上述したように、多くの場合、車両には、横Gセンサなどの横加速度検出手段が搭載されている。よって、請求項4に係る発明のように、横加速度検出手段により検出された横加速度が所定の閾横加速度以上である場合に、車両が片荷状態であることを判定することにより、片荷判定手段を簡素に構成することができる。
【0028】
車両に積載された積荷の車幅方向の偏りが大きくなるほど、車両の車幅方向の傾きが大きくなり、重力による車幅方向の加速度である横加速度が大きくなる。よって、請求項5に係る発明のように、横加速度が大きいほど、車両に積載された積荷の車幅方向の偏りが大きいことを判定することができる。また、この判定結果に基づいて、片荷状態による横転危険性を定量化することができるため、例えば、横転危険性に応じて、横転抑制制御の介入閾値を設定したり、運転者に横転危険性を報知する警報レベルを設定したりすることができる。
【0029】
請求項6及び7に係る発明によれば、横加速度検出手段により検出された横加速度と、遠心加速度算出手段により算出された遠心加速度との差である横加速度差に基づいて車両が片荷状態であることを判定する。このように、片荷状態の判定に横加速度差を用いることによって、横加速度から遠心加速度成分を排除して、横加速度に基づく片荷状態の判定精度をより向上させることができる。
【0030】
なお、本発明の片荷判定装置は、走行中の車両の片荷状態を判定する装置であるため、車両の走行中に積荷が荷崩れを起こした場合であっても、車両を停止させることなく、走行中に片荷状態の変化を判定することが可能となっている。
【0031】
以上のように、本発明によれば、簡素な構成で走行中の車両の片荷状態を正確に判定し得る片荷判定装置を提供することができる。
【図面の簡単な説明】
【0032】
【図1】第1実施形態の片荷判定装置を装備した車両を模式的に説明する説明図である。
【図2】第1実施形態の片荷判定装置の構成を説明するブロック図である。
【図3】Gセンサによる横加速度の検出を説明する説明図であって、(a)は平坦路面を直進している車両がロールしている状況、(b)は傾斜路面を直進している車両がロールしていない状況を示している。
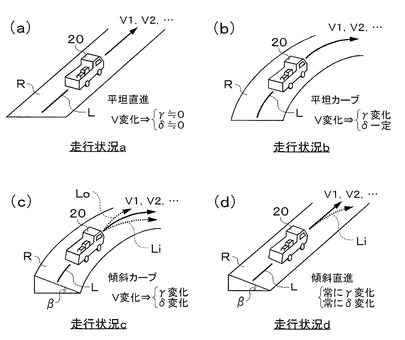
【図4】車両の走行状況を説明する説明図であって、(a)は車両が平坦路面を直進している状況、(b)は車両が平坦路面をカーブ走行している状況、(c)は車両が傾斜路面をカーブ走行している状況、(d)は車両が傾斜路面を直進している状況を示している。
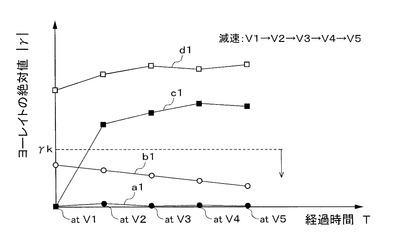
【図5】第1実施形態におけるヨーレイトの絶対値の経時変化を示すグラフである。
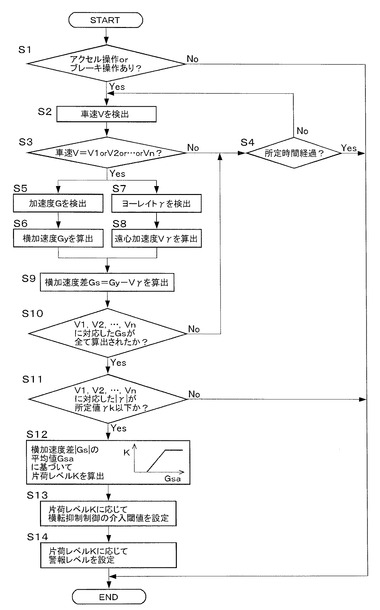
【図6】第1実施形態において片荷判定を実行するためのフローチャートである。
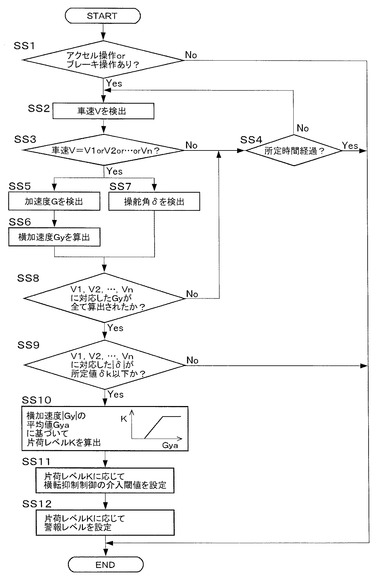
【図7】第2実施形態において片荷判定を実行するためのフローチャートである。
【図8】第2実施形態における操舵角の絶対値の経時変化を示すグラフである。
【図9】従来の片荷判定装置を備えるロールオーバ防止装置を装備した車両を模式的に説明する説明図である。
【発明を実施するための形態】
【0033】
以下、本発明の片荷判定装置の実施形態について図面を参照しつつ詳しく説明する。
<第1実施形態>
(1)片荷判定装置1の構成
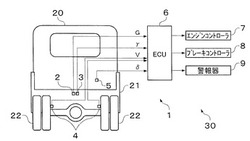
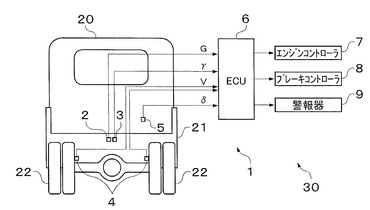
図1は、片荷判定装置1を装備した車両20(例えば、トラック)を後方からみた状況を模式的に示している。図1に示すように、車両20は、Gセンサ2(横加速度検出手段)と、ヨーレイトセンサ3(ヨーレイト検出手段)と、車速センサ4(車速検出手段)と、舵角センサ5(舵角検出手段)と、ECU6(電子コントロールユニット)と、エンジンコントローラ7と、ブレーキコントローラ8と、警報器9とを備えている。ロールオーバ防止装置30は、車両20に備わるこれら全ての部品によって構成されている。
【0034】
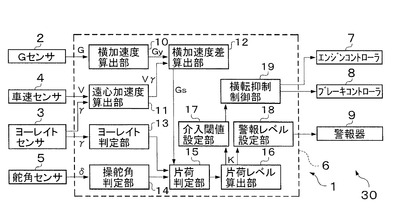
図2に示すように、ECU6は、横加速度算出部10(横加速度検出手段)と、遠心加速度算出部11(遠心加速度算出手段)と、横加速度差算出部12(横加速度差算出手段)と、ヨーレイト判定部13(走行状態判定手段)と、操舵角判定部14(走行状態判定手段)と、片荷判定部15(片荷判定手段)と、片荷レベル算出部16(片荷判定手段)と、介入閾値設定部17と、警報レベル設定部18と、横転抑制制御部19とを備えている。
【0035】
本実施形態において、片荷判定装置1は、車両20の横転を抑制するロールオーバ防止装置30の一部であり、Gセンサ2と、ヨーレイトセンサ3と、車速センサ4と、ECU6内の横加速度算出部10と、遠心加速度算出部11と、横加速度差算出部12と、ヨーレイト判定部13と、片荷判定部15と、片荷レベル算出部16とにより構成されている。なお、本実施形態においては、舵角センサ5及び操舵角判定部14を使用していないため説明を省略する。
【0036】
Gセンサ2は、車両20に作用する加速度を検出するセンサであり、X、Y、Zの3方向の加速度Gx、Gy、Gzからなる加速度Gを検出できるセンサである。Gセンサ2は、X方向を車体21の前後方向、Y方向を車体21の車幅方向、Z方向を車体21の上下方向に向けた状態で、車体21の重心位置に取り付けられている。
【0037】
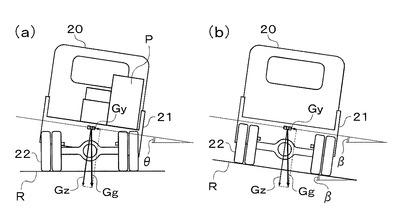
図3(a)に示すように、車両20が横断勾配が水勾配程度に小さい平坦な路面R(以下、平坦路面と呼ぶ)を直進している状況において、車両20の荷台に積荷Pが車幅方向に偏って積載されているとき、車体21が水平に対してロール角度θで傾いている。このとき、横加速度Gy=Gg・sinθ(Ggは重力加速度)で算出される。
【0038】
また、図3(b)に示すように、車両20が横断勾配の大きい路面R(以下、傾斜路面と呼ぶ)を直進している状況において、車両20が空荷の状態で、車体21がロールしてないとき、横加速度Gy=Gg・sinβ(βは水平に対する路面傾斜角度)で算出される。
【0039】
ここで、ロール角度θ=路面傾斜角度βであるときには、横加速度Gyが同じ値となる。したがって、横加速度Gyの値のみから、横加速度Gyが車体21のロール角度θによって発生しているのか、又は路面傾斜角度βによって発生しているのかを区別することはできない。
【0040】
ヨーレイトセンサ3は、車両20のヨーレイトγ(車体21の回転角速度)を検出するセンサであり、ヨーレイトセンサ3の軸を車体21の上下方向に合わせた状態で、Gセンサ2と同位置である車体21の重心位置に取り付けられている。
【0041】
車速センサ4は、車両20の左右の車輪22、22にそれぞれ一つずつ設置されており、車輪22の回転状態を検出することにより車速Vを検出するセンサである。
【0042】
Gセンサ2、ヨーレイトセンサ3及び車速センサ4の詳細構造等については、標準的なロールオーバ防止装置や、標準的な横滑り防止装置を装備した車両において公知であるため説明を省略する。
【0043】
横加速度算出部10は、Gセンサ2で検出される3方向の加速度Gx、Gy、Gzから横加速度Gyのみを抽出する部分である。横加速度Gyには、車体21のロールや路面傾斜によって発生する車体21の傾斜に応じて重力加速度Ggを車幅方向にベクトル分解した傾斜成分と、車両20がカーブ走行することによって発生する遠心力による車幅方向の遠心加速度成分とが含まれている。
【0044】
遠心加速度算出部11は、ヨーレイトγと車速Vとを掛け合わせて車幅方向の遠心加速度Vγを算出する部分である。
【0045】
横加速度差算出部12は、上述した横加速度Gyから遠心加速度Vγを差し引いて横加速度差Gsを算出する部分である。横加速度差Gsには、上述した傾斜成分のみが含まれており、上述した遠心加速度成分は排除されている。
【0046】
ヨーレイト判定部13は、車両20の加速中又は減速中に相異なる複数の車速Vにおけるヨーレイトγの絶対値が全て所定の閾ヨーレイトγk以下であるか否かを判定して、ヨーレイトγの絶対値が全て所定の閾ヨーレイトγk以下である場合に、車両20が略平坦な路面を略直進していることを判定する部分である。
【0047】
片荷判定部15は、ヨーレイト判定部13により車両20が略平坦な路面を略直進していることが判定されている場合に、横加速度差Gsに基づいて車両20が片荷状態であることを判定する部分である。
【0048】
片荷レベル算出部16は、相異なる複数の車速Vにおいて算出された全ての横加速度差Gsの絶対値を平均化した平均値Gsaに基づいて、平均値Gsaが大きいほど、車両20に積載された積荷Pの車幅方向の偏りが大きいことを判断して、大きな片荷レベルKを設定する部分である。
【0049】
介入閾値設定部17は、片荷レベル算出部16で設定した片荷レベルKに応じて横転抑制制御部19が横転抑制制御を行う際の介入閾値を設定する部分である。
【0050】
警報レベル設定部18は、片荷レベル算出部16で設定した片荷レベルKに応じて警報器9が報知する警報のレベル(例えば、警報音の大きさ)を設定する部分である。
【0051】
横転抑制制御部19は、介入閾値設定部17で設定された介入閾値を反映して、エンジンコントローラ7を介して燃料供給量を減少させると共に、ブレーキコントローラ8を介してブレーキを作動させる部分である。これにより、車速Vが低下して、旋回中の車両20に発生する遠心力が低下してロールが小さくなり、車両20の横転を抑制することができる。
【0052】
(2)ヨーレイト判定部13の作動
横加速度差Gsに基づいて車両20が片荷状態であることを判定できるのは、横加速度差Gsに、片荷状態によって発生するロールによる傾斜成分以外の加速度成分がほとんど含まれていない状況に限定される。したがって、車両20がこのような限定された走行状況で走行しているか否かを走行状態判定手段であるヨーレイト判定部13により判定する。
【0053】
上述したように、横加速度差Gsは、横加速度Gyから遠心加速度Vγを差し引いた値であるため、横加速度差Gsには、横加速度Gyの傾斜成分のみが含まれており、横加速度Gyの遠心加速度成分は排除されている。しかし、横加速度Gyの遠心加速度成分が排除できたとしても、遠心力によって実際に車体21に発生するロールが排除できるわけではない。
【0054】
したがって、横加速度差Gsに基づいて車両20が片荷状態であることを判定できるのは、車両20に大きな遠心力が作用しない走行状況、すなわち、直線道路を直進している状況や、緩い曲線道路をカーブ走行している状況や、ごく低速での右左折などに限定される。
【0055】
また、図3(b)に示したような車両20が傾斜路面を走行している状況も、横加速度差Gsに、路面傾斜角度βによる傾斜成分が含まれてしまうため、横加速度差Gsに基づいて車両20が片荷状態であることを判定することができない。
【0056】
本実施形態においては、ヨーレイト判定部13によって、様々な走行状況の中から、車両20に大きな遠心力が作用することなく、車両20が平坦路面を走行している状況を判定することが可能である。以下にヨーレイト判定部13の作動について詳述する。
【0057】
図4に示す車両20の様々な走行状況において、図4(a)は通常の走行で多くみられる平坦路面を直進している走行状況a、図4(b)は山道や交差点での右左折などのように平坦路面をカーブ走行している走行状況b、図4(c)は高速道路のようにバンクのある傾斜路面をカーブ走行している走行状況c、図4(d)は工場や荷役施設などの施設内道路で遭遇することがある傾斜路面を直進している走行状況dを示している。
【0058】
走行状況a〜dにおいて、車両20に大きな遠心力が作用することなく、車両20が平坦路面を走行している状況は、走行状況aと、走行状況bにおいてカーブが緩い(カーブ半径が大きい)場合やごく低速で走行している状況とに限定される。
【0059】
走行状況a〜dにおいて、車両20の加速又は減速により車速VがV1、V2、…と変化したとき、走行状況aにおいては、ヨーレイトγがほとんど変化せずγ≒0である。また、走行状況bにおいては、たとえ路面Rのカーブ半径が一定であったとしても、車速Vの変化によってヨーレイトγが変化する。
【0060】
また、走行状況cにおいては、路面Rのカーブに沿った走行軌道Lで走行する際に、ヨーレイトγが発生することなくハンドルがぶれることなく走行できる最適な車速V1が1つ定まる。しかし、この最適な車速V1から減速すれば、車両20はカーブの内側に向かう走行軌道Liに向かおうとするため、車両20が走行軌道Lを維持するために、ハンドルを山側に切る動作を繰り返す必要があり、ヨーレイトγが変化する。一方、この最適な車速V1から加速すれば、車両20はカーブの外側に向かう走行軌道Loに向かおうとするため、車両20が走行軌道Lを維持するために、ハンドルを谷側に切る動作を繰り返す必要があり、ヨーレイトγが変化する。
【0061】
また、走行状況dにおいては、車速Vの変化によらず、常に車両20が谷側に向かう走行軌道Liに向かおうとするため、常にハンドルを山側に切る動作を繰り返す必要があり、常にヨーレイトγが変化する。
【0062】
このように、車両20の車速Vを変化させたのときのヨーレイトγの変化は、走行状況a〜d毎に異なる特徴を示す。ヨーレイト判定部13は、このような走行状況毎に異なるヨーレイトγの変化の特徴を利用して走行状況の判定を行っている。
【0063】
図5に車速VがV1→V2→V3→V4→V5と減速したときのヨーレイトγの絶対値の経時変化の一例を示す。図5において、a1、b1、c1及びd1は、それぞれ走行状況a、b、c及びdにおけるヨーレイトγの経時変化を示している。γkは、ヨーレイトγの判定基準として適宜設定する所定の閾ヨーレイトである。
【0064】
図5に示すように、走行状況a及びbの全てのヨーレイトγの絶対値は、閾ヨーレイトγk以下の値となっている。このとき、ヨーレイト判定部13は、車両20が大きな遠心力が作用することなく、平坦路面を走行していると判定する。また、走行状況c及びdにおいては、相異なる複数の車速Vにおけるヨーレイトγの絶対値が、閾ヨーレイトγkを上回っている。このとき、ヨーレイト判定部13は、車両20が大きな遠心力が作用する状況か、傾斜路面を走行している状況であると判定する。
【0065】
ここで、閾ヨーレイトγkをさらに小さく設定すれば、走行状況bのヨーレイトγも閾ヨーレイトγkを上回ることとなる。すなわち、閾ヨーレイトγkの設定により、走行状況bの中からカーブが緩い場合やごく低速で走行している状況を抽出することが可能となる。
【0066】
以上のように、ヨーレイト判定部13によって、車両20の加速中又は減速中に相異なる複数の車速Vにおけるヨーレイトγの絶対値が全て所定の閾ヨーレイトγk以下であるか否かを判定することにより、様々な走行状況の中から、車両20に大きな遠心力が作用することなく、車両20が平坦路面を走行している状況を判定することが可能となる。すなわち、車両20が略平坦な路面を略直進していることを判定することが可能となる。
【0067】
(3)片荷判定装置1の作動ステップ
本実施形態における片荷判定装置1によって片荷判定を実行するためのフローチャートを図6に示す。車両20の走行中において、図6に示すSTARTからENDまでの一連の片荷判定フローが実行され、ENDとなった後に再びSTARTに戻って片荷判定フローが繰り返される。
【0068】
ステップS1において、アクセル操作又はブレーキ操作があるか否かの判定を行う。すなわち、車両20が加速中又は減速中であるか否かの判定を行う。ここで、アクセル操作又はブレーキ操作がない場合にはENDに進み、操作がある場合にはステップS2に進む。
【0069】
ステップS2において、車速センサ4により車速Vを検出し、ステップS3において、車速Vが相異なる複数の車速V1、V2、…、Vnのいずれかに一致するか否かの判定を行う。そして、車速Vが一致していない場合にはステップS4に進み、一致している場合にはステップS5及びS7に進む。
【0070】
なお、相異なる複数の車速V1、V2、…、Vnの設定は、例えば、始めに検出した車速Vを車速V1として、車速V1から5〜10km/h刻みで車速V2、…、Vnを設定するとよい。車速V1、V2、…、Vnの設定個数nは、少なくともn=3とする必要があり、n=5程度とすることが好ましい。
【0071】
ステップS4において、ステップS2及びS3を繰り返し実行するのに費やした時間が所定時間に納まっているか否かの判定を行う。所定時間経過していない場合にはステップS2に戻り、所定時間経過している場合にはENDに進む。このようにステップS4において、経過時間の判定を行うことにより、車両20が走行する路面の状況や、車両20の加速又は減速の状況が大きく変化した場合に、片荷判定フローを一時リセットすることが可能となる。これにより、片荷判定をより正確に行うことが可能となる。
【0072】
ステップS5において、Gセンサ2により加速度Gを検出し、ステップS6において、加速度Gから車幅方向の横加速度Gyのみを抽出する。その後、ステップS9に進む。ステップS5及びS6は、横加速度算出部10によって実行される。
【0073】
ステップS7において、ヨーレイトセンサ3によりヨーレイトγを検出し、ステップS8において、車速Vとヨーレイトγを掛け合わして車幅方向の遠心加速度Vγを算出する。その後、ステップS9に進む。ステップS8は、遠心加速度算出部11によって実行される。
【0074】
ステップS9において、横加速度Gyから遠心加速度Vγを差し引いて横加速度差Gsを算出する。その後、ステップS10に進む。ステップS9は、横加速度差算出部12によって実行される。
【0075】
ステップS10において、設定した車速V1、V2、…、Vnに対応した横加速度差Gsが全て算出されたか否かの判定を行う。全ての横加速度差Gsが算出されていない場合にはステップS4に進み、ステップS2〜S10を繰り返し実行するのに費やした時間が所定時間に納まっているか否かの判定を行う。全ての横加速度差Gsが算出された場合にはステップS11に進む。
【0076】
ステップS11において、設定した車速V1、V2、…、Vnに対応したヨーレイトγの絶対値が全て所定の閾ヨーレイトγk以下であるか否かの判定を行う。ヨーレイトγの絶対値が全て所定の閾ヨーレイトγk以下となっていない場合にはENDに進み、閾ヨーレイトγk以下となっている場合には片荷状態を判定することが可能であると判定してステップS12に進む。ステップS11は、ヨーレイト判定部13と片荷判定部15とによって実行される。
【0077】
ステップS12において、全ての横加速度差Gsの絶対値を平均化した平均値Gsaを算出し、平均値Gsaに基づいて片荷レベルKを算出する。その後、ステップS13に進む。ここで、図6に示すように、平均値Gsaと片荷レベルKとの関係を、平均値Gsaがある程度大きい値となるまでは片荷レベルK=0とし、その後、平均値Gsaの増加に合わせて片荷レベルKを増加させ、その後、平均値Gsaがある程度大きい値となった以降は片荷レベルKを最大値にするとよい。片荷レベルKが最大値となったときには、車両20の横転危険性がかなり高まっていることとなる。ステップS12は、片荷レベル算出部16によって実行される。
【0078】
ステップS13において、片荷レベルKに応じて横転抑制制御の介入閾値を設定する。その後、ステップS14に進む。ステップ13は、介入閾値設定部17によって実行される。ここで設定された介入閾値が横転抑制制御部19に送られる。
【0079】
ステップS14において、片荷レベルKに応じて警報レベルを設定する。その後、ENDに進む。ステップ14は、警報レベル設定部18によって実行される。ここで設定された警報レベルが運転者に横転危険性を報知する警報機9の警報レベルとして反映される。
【0080】
(4)片荷判定装置1の効果
このような本実施形態の構成によれば、片荷判定装置1に備わるセンサは、Gセンサ2、ヨーレイトセンサ3及び車速センサ4の3つのみである。したがって、特許文献1に記載のロールオーバ防止装置60に備わる車高センサ61L、61Rのようなロール角度を算出するための専用のセンサは不要であり、車両20の状態を検出する各センサの構成が簡素である。よって、片荷判定装置1を簡素に構成することができるため、片荷判定装置1を低コストで提供することができる。
【0081】
また、標準的なロールオーバ防止装置や、標準的な横滑り防止装置を装備した車両においては、Gセンサ2、ヨーレイトセンサ3及び車速センサ4が既に備わっている。この場合、本実施形態の片荷判定装置1を導入するの際して新たなセンサを装備する必要がないため経済的である。
【0082】
また、本実施形態の構成によれば、Gセンサ2の検出信号により算出される横加速度Gyから、ヨーレイトγ及び車速Vの積として求まる遠心加速度Vγを差し引いた横加速度差Gsに基づいて車両20が片荷状態であることを判定する。このように、片荷状態の判定に横加速度差Gsを用いることによって、横加速度Gyから遠心加速度成分を排除して、横加速度Gyに基づく片荷状態の判定精度をより向上させることができる。
【0083】
また、本実施形態の構成によれば、全ての横加速度差Gsの絶対値を平均化した平均値Gsaが大きいほど、車両20に積載された積荷の車幅方向の偏りが大きいと判定する。この判定結果に基づいて、片荷状態による横転危険性を定量化する片荷レベルKを設定することができるため、例えば、片荷レベルKに応じて、横転抑制制御の介入閾値を設定したり、運転者に横転危険性を報知する警報レベルを設定したりすることができる。
【0084】
<第2実施形態>
(1)片荷判定装置の構成
上述した第1実施形態においては、車両20の車速Vを変化させたのときのヨーレイトγの変化により車両20の走行状況を判定していたのに対して、本実施形態においては、車両20の車速Vを変化させたのときの操舵角δの変化により車両20の走行状況を判定する点で異なる。
【0085】
また、上述した第1実施形態においては、横加速度差Gsに基づいて車両20が片荷状態であることを判定していたのに対して、本実施形態においては、横加速度Gyに基づいて車両20が片荷状態であることを判定する点で異なる。
【0086】
本実施形態の片荷判定装置の構成を図1及び2を用いて説明する。本実施形態の片荷判定装置は、Gセンサ2(横加速度検出手段)と、車速センサ4(車速検出手段)と、舵角センサ5(舵角検出手段)と、ECU6内の横加速度算出部10(横加速度検出手段)と、操舵角判定部14(走行状態判定手段)と、片荷判定部15(片荷判定手段)と、片荷レベル算出部16(片荷判定手段)とにより構成されている。
【0087】
すなわち、本実施形態においては、第1実施形態の片荷判定装置1で使用していたヨーレイトセンサ3、遠心加速度算出部11、横加速度差算出部12及びヨーレイト判定部13を使用していない。なお、図2のブロック図には明示されていないが、横加速度算出部10により算出された横加速度Gyは、片荷判定部15に送られる。
【0088】
以降、第1実施形態において説明していない舵角センサ5及び操舵角判定部14の構成についてのみ説明する。
【0089】
舵角センサ5は、車両20のハンドルの切れ角(操舵角δ)を検出するセンサであり、図示しないステアリングシャフトに取り付けられている。舵角センサ5の詳細構造等については、標準的なロールオーバ防止装置や、標準的な横滑り防止装置を装備した車両において公知であるため説明を省略する。
【0090】
操舵角判定部14は、車両20の加速中又は減速中に相異なる複数の車速Vにおける操舵角δの絶対値が全て所定の閾操舵角δk以下であるか否かを判定して、操舵角δの絶対値が全て所定の閾操舵角δk以下である場合に、車両20が略平坦な路面を略直進していることを判定する部分である。
【0091】
なお、後述する操舵角判定部14の作動によって、車両20に大きな遠心力が作用しない走行状況を判定できる。このような走行状況においては、横加速度差Gsと横加速度Gyとの値の差はわずかである。よって、横加速度差Gsに基づいて車両20が片荷状態であることを判定する代わりに、横加速度Gyに基づいて車両20が片荷状態であることを判定することもできる。
【0092】
(2)操舵角判定部14の作動
操舵角判定部14の作動は、第1実施形態において述べたヨーレイト判定部13の作動と類似しているため、説明を一部簡略化する。
【0093】
図4に示した走行状況a〜dにおいて、車両20の加速又は減速により車速VがV1、V2、…と変化したとき、走行状況aにおいては、操舵角δがほとんど変化せずδ≒0である。また、走行状況bにおいては、路面Rのカーブ半径が一定の場合には、車速Vの変化によらず操舵角δは一定である。
【0094】
また、走行状況cにおいては、路面Rのカーブに沿った走行軌道Lで走行する際に、ハンドルがぶれることなく操舵角δ=0で走行できる最適な車速V1が1つ定まる。しかし、この最適な車速V1から車速Vが変化すれば、ハンドルを山側又は谷側に切る動作を繰り返す必要があり、操舵角δが変化する。また、走行状況dにおいては、車速Vの変化によらず、常に車両20が谷側に向かう走行軌道Liに向かおうとするため、常にハンドルを山側に切る動作を繰り返す必要があり、常に操舵角δが変化する。
【0095】
このように、車両20の車速Vを変化させたのときの操舵角δの変化は、走行状況a〜d毎に異なる特徴を示す。操舵角判定部14は、このような走行状況毎に異なる操舵角δの変化の特徴を利用して走行状況の判定を行っている。
【0096】
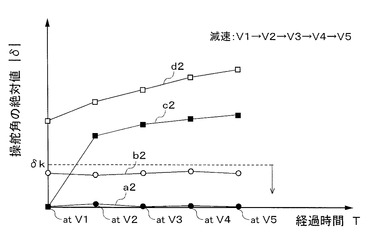
図8に車速VがV1→V2→V3→V4→V5と減速したときの操舵角δの絶対値の経時変化の一例を示す。図8において、a2、b2、c2及びd2は、それぞれ走行状況a、b、c及びdにおける操舵角δの経時変化を示している。δkは、操舵角δの判定基準として適宜設定する所定の閾操舵角である。
【0097】
図8に示すように、走行状況a及びbの全ての操舵角δの絶対値は、閾操舵角δk以下の値となっている。このとき、操舵角判定部14は、車両20が大きな遠心力が作用することなく、平坦路面を走行していると判定する。また、走行状況c及びdにおいては、相異なる複数の車速Vにおける操舵角δの絶対値が、閾操舵角δkを上回っている。このとき、操舵角判定部14は、車両20が大きな遠心力が作用する状況か、傾斜路面を走行している状況であると判定する。
【0098】
ここで、閾操舵角δkをさらに小さく設定すれば、走行状況bの操舵角δも閾操舵角δkを上回ることとなる。すなわち、閾操舵角δkの設定により、走行状況bの中からカーブが緩い場合やごく低速で走行している状況を抽出することが可能となる。
【0099】
以上のように、操舵角判定部14によって、車両20の加速中又は減速中に相異なる複数の車速Vにおける操舵角δの絶対値が全て所定の閾操舵角δk以下であるか否かを判定することにより、様々な走行状況の中から、車両20に大きな遠心力が作用することなく、車両20が平坦路面を走行している状況を判定することが可能となる。すなわち、車両20が略平坦な路面を略直進していることを判定することが可能となる。
【0100】
(3)片荷判定装置の作動ステップ
本実施形態における片荷判定装置によって片荷判定を実行するためのフローチャートを図7に示す。本実施形態における片荷判定装置の作動ステップは、第1実施形態において述べた片荷判定装置1の作動ステップと類似しているため、説明を一部簡略化する。
【0101】
本実施形態におけるステップSS1〜SS6は、第1実施形態におけるステップS1〜S6と同一であるため説明を省略する。ステップSS3において、車速Vが相異なる複数の車速V1、V2、…、Vnのいずれかに一致している場合にはステップSS5及びSS7に進む。
【0102】
ステップSS7において、舵角センサ5により操舵角δを検出した後、ステップSS8に進む。ステップSS8において、設定した車速V1、V2、…、Vnに対応した横加速度Gyが全て算出されたか否かの判定を行う。全ての横加速度Gyが算出されていない場合にはステップSS4に進み、ステップSS2〜SS10を繰り返し実行するのに費やした時間が所定時間に納まっているか否かの判定を行う。全ての横加速度Gyが算出された場合にはステップSS9に進む。
【0103】
ステップSS9において、設定した車速V1、V2、…、Vnに対応した操舵角δの絶対値が全て所定の閾操舵角δk以下であるか否かの判定を行う。操舵角δの絶対値が全て所定の閾操舵角δk以下となっていない場合にはENDに進み、閾操舵角δk以下となっている場合には片荷状態を判定することが可能であると判定してステップSS10に進む。ステップSS9は、操舵角判定部14と片荷判定部15とによって実行される。
【0104】
ステップSS10において、全ての横加速度Gyの絶対値を平均化した平均値Gyaを算出し、平均値Gyaに基づいて片荷レベルKを算出する。その後、ステップSS11に進む。ここで、図7に示す平均値Gyaと片荷レベルKとの関係は、図6で示した平均値Gsaと片荷レベルKとの関係と類似しているため説明を省略する。ステップSS10は、片荷レベル算出部16によって実行される。
【0105】
本実施形態におけるステップSS11及びSS12は、第1実施形態におけるステップS13及びS14と同一であるため説明を省略する。
【0106】
(4)片荷判定装置の効果
このような本実施形態の構成によれば、片荷判定装置に備わるセンサは、Gセンサ2、舵角センサ5及び車速センサ4の3つのみである。したがって、第1実施形態と同様に、車両20の状態を検出する各センサの構成が簡素である。よって、片荷判定装置を簡素に構成することができるため、片荷判定装置を低コストで提供することができる。
【0107】
また、標準的なロールオーバ防止装置や、標準的な横滑り防止装置を装備した車両においては、Gセンサ2、舵角センサ5及び車速センサ4が既に備わっている。この場合、本実施形態の片荷判定装置を導入するの際して新たなセンサを装備する必要がないため経済的である。
【0108】
また、本実施形態の構成によれば、全ての横加速度Gyの絶対値を平均化した平均値Gyaが大きいほど、車両20に積載された積荷の車幅方向の偏りが大きいと判定する。したがって、第1実施形態と同様に、例えば、片荷レベルKに応じて、横転抑制制御の介入閾値を設定したり、運転者に横転危険性を報知する警報レベルを設定したりすることができる。
【0109】
<その他の実施形態>
本発明の片荷判定装置は、上述した実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において、当業者が行い得る変更、改良等を施した種々の形態にて実施することができることは言うまでもない。
【0110】
例えば、第1実施形態においては、車両20の車速Vを変化させたのときのヨーレイトγの変化により車両20の走行状況を判定しているが、これに代えて、第2実施形態のように、車両20の車速Vを変化させたのときの操舵角δの変化により車両20の走行状況を判定する構成としてもよい。
【0111】
また、第1実施形態においては、横加速度差Gsに基づいて車両20が片荷状態であることを判定しているが、これに代えて、第2実施形態のように、横加速度Gyに基づいて車両20が片荷状態であることを判定する構成としてもよい。
【0112】
また、第1及び第2実施形態において、車両20の車速Vを変化させたのときのヨーレイトγ及び操舵角δの双方の変化により車両20の走行状況を判定することにより、片荷判定の精度をさらに高めることもできる。
【符号の説明】
【0113】
1 … 片荷判定装置
2 … Gセンサ(横加速度検出手段)
3 … ヨーレイトセンサ(ヨーレイト検出手段)
4 … 車速センサ(車速検出手段)
5 … 舵角センサ(舵角検出手段)
10 … 横加速度算出部(横加速度検出手段)
11 … 遠心加速度算出部(遠心加速度算出手段)
12 … 横加速度差算出部(横加速度差算出手段)
13 … ヨーレイト判定部(走行状態判定手段)
14 … 操舵角判定部(走行状態判定手段)
15 … 片荷判定部(片荷判定手段)
16 … 片荷レベル算出部(片荷判定手段)
20 … 車両
Gy … 横加速度 Gs … 横加速度差
P … 積荷 V … 車速
γ … ヨーレイト γk … 閾ヨーレイト
δ … 操舵角 δk … 閾操舵角
【技術分野】
【0001】
本発明は、車両に積載された積荷が車幅方向に偏っている片荷状態を判定する片荷判定装置に関するものである。
【背景技術】
【0002】
一般に、走行中の車両が急旋回すると、あるいはコーナにオーバスピードで進入すると、車両に過度の遠心力が加わるため、車両がロールして横転するおそれがある。そして、車両に積載された積荷が車幅方向に偏っている片荷状態で車両が走行しているときには、車体が車幅方向に常にロールしている状態となっているため、片荷状態になっていない場合に比べて、さらに車両が横転しやすくなる。
【0003】
このような走行中の車両の横転を回避するために、例えば、特許文献1には、車両の片荷状態を判定する片荷判定装置を備えるロールオーバ防止装置が開示されている。特許文献1に記載のロールオーバ防止装置を装備した車両を図9に示す。
【0004】
図9に示すように、ロールオーバ防止装置60は、車両70(例えば、セミトラクタ)に装備される。ロールオーバ防止装置60は、旋回時における車両70のロール状態を検知して運転者に表示警告するもので、車高センサ61L、61Rと、ECU62(電子コントロールユニット)と、エンジンコントローラ63と、ブレーキコントローラ64と、ロールインジケータ65と、警報タイミング選択スイッチ66と、警報器67とを備えている。
【0005】
ロールオーバ防止装置60は、ECU62において車両70の横転危険性を判定し、この判定結果に基づいて、エンジンコントローラ63を介して燃料供給量を減少させると共に、ブレーキコントローラ64を介してブレーキを作動させる。これにより、車速が低下して、旋回中の車両70に発生する遠心力が低下してロールが小さくなり、車両70の横転を抑制することができる。
【0006】
ここで、ECU62による車両70の横転危険性の判定には、車両70の片荷状態によるロールの程度が反映されている。車両70のロール角度は、車高センサ61Lが検出する左側の車高HL、車高センサ61Rが検出する右側の車高HR、及び車高センサ61L、61Rの取付間隔を用いて幾何学的に算出することができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2002−166745号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述した特許文献1に記載のロールオーバ防止装置60は、車両70のロール角度を算出するために、車高センサ61L、61Rを備えている。この車高センサ61L、61Rを用いることによって、車両70が傾斜路面(横断勾配が大きい路面)を走行している場合であっても、車両70のロール角度を算出することが可能となっている。
【0009】
ところが、車高センサ61L、61Rは、標準的なロールオーバ防止装置や、標準的な横滑り防止装置(ESC)には備わっていないロール角度を算出するための専用のセンサである。したがって、特許文献1に記載のロールオーバ防止装置60は、車高センサ61L、61Rを備えていることによりコストがかかるという問題がある。
【0010】
本発明は、上記実情に鑑みてなされたものであり、簡素な構成で走行中の車両の片荷状態を正確に判定し得る片荷判定装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記の課題を解決するため、請求項1に係る片荷判定装置の構成上の特徴は、車両に積載された積荷が車幅方向に偏っている片荷状態を判定する片荷判定装置において、前記車両の車幅方向の加速度である横加速度を検出する横加速度検出手段と、前記車両が略平坦な路面を略直進していることを判定する走行状態判定手段と、前記走行状態判定手段により前記車両が略平坦な路面を略直進していることが判定されている場合に、前記横加速度に基づいて前記車両が片荷状態であることを判定する片荷判定手段と、を備えていることである。
【0012】
請求項2に係る発明の構成上の特徴は、請求項1に記載の片荷判定装置において、前記車両のヨーレイトを検出するヨーレイト検出手段と、前記車両の車速を検出する車速検出手段と、を備え、前記走行状態判定手段は、前記車速検出手段により検出された車速及び前記ヨーレイト検出手段により検出されたヨーレイトに基づいて、前記車両の加速中又は減速中の相異なる複数の車速におけるヨーレイトの絶対値が全て所定の閾ヨーレイト以下である場合に、該車両が略平坦な路面を略直進していることを判定することである。
【0013】
請求項3に係る発明の構成上の特徴は、請求項1又は2に記載の片荷判定装置において、前記車両の操舵角を検出する舵角検出手段と、前記車両の車速を検出する車速検出手段と、を備え、前記走行状態判定手段は、前記車速検出手段により検出された車速及び前記舵角検出手段により検出された操舵角に基づいて、前記車両の加速中又は減速中の相異なる複数の車速における操舵角の絶対値が全て所定の閾操舵角以下である場合に、該車両が略平坦な路面を略直進していることを判定することである。
【0014】
請求項4に係る発明の構成上の特徴は、請求項1から3のうちのいずれか一項に記載の片荷判定装置において、前記片荷判定手段は、前記横加速度検出手段により検出された横加速度が所定の閾横加速度以上である場合に、前記車両が片荷状態であることを判定することである。
【0015】
請求項5に係る発明の構成上の特徴は、請求項1から4のうちのいずれか一項に記載の片荷判定装置において、前記片荷判定手段は、前記横加速度検出手段により検出された横加速度が大きいほど、前記車両に積載された積荷の車幅方向の偏りが大きいことを判定することである。
【0016】
請求項6に係る発明の構成上の特徴は、請求項1から5のうちのいずれか一項に記載の片荷判定装置において、前記車両のヨーレイトを検出するヨーレイト検出手段と、前記車両の車速を検出する車速検出手段と、前記ヨーレイト検出手段により検出されたヨーレイト及び前記車速検出手段により検出された車速に基づいて、該ヨーレイト及び該車速の積を、遠心加速度として算出する遠心加速度算出手段と、前記横加速度検出手段により検出された横加速度及び前記遠心加速度算出手段により算出された遠心加速度に基づいて、前記横加速度と前記遠心加速度との差を、横加速度差として算出する横加速度差算出手段と、を備え、前記片荷判定手段は、前記横加速度差が所定の閾横加速度差以上である場合に、前記車両が片荷状態であることを判定することである。
【0017】
請求項7に係る発明の構成上の特徴は、請求項1から6のうちのいずれか一項に記載の片荷判定装置において、前記車両のヨーレイトを検出するヨーレイト検出手段と、前記車両の車速を検出する車速検出手段と、前記ヨーレイト検出手段により検出されたヨーレイト及び前記車速検出手段により検出された車速に基づいて、該ヨーレイト及び該車速の積を、遠心加速度として算出する遠心加速度算出手段と、前記横加速度検出手段により検出された横加速度及び前記遠心加速度算出手段により算出された遠心加速度に基づいて、前記横加速度と前記遠心加速度との差を、横加速度差として算出する横加速度差算出手段と、を備え、前記片荷判定手段は、前記横加速度差が大きいほど、前記車両に積載された積荷の車幅方向の偏りが大きいことを判定することである。
【発明の効果】
【0018】
車両が片荷状態である場合、車両が車幅方向に傾き、重力により車幅方向の加速度である横加速度が生じる。そのため、横加速度に基づいて車両が片荷状態であるか否かを判定することが可能である。多くの場合、車両には、横Gセンサなどの横加速度検出手段が搭載されているため、請求項1に係る発明のように、横加速度に基づいて車両の片荷状態を判定することにより、当該車両に専用の検出手段(例えば、特許文献1に記載のロールオーバ防止装置60に備わる車高センサ61L、61R)を搭載することなく、片荷判定装置を簡素に構成することができる。
【0019】
ところで、車両が片荷状態である場合に加え、同車両が傾斜路面(横断勾配が大きい路面)を走行している場合にも、車両が車幅方向に傾き、この車幅方向の傾きに起因する横加速度が生じる。また、車両の旋回中にも、当該車両に加わる遠心力により横加速度が生じる。すなわち、上記横加速度に基づく片荷判定では、車両の傾斜路面走行に起因する判定誤差や、車両の旋回に起因する判定誤差が考えられる。
【0020】
この点、請求項1に係る発明においては、走行状態判定手段により車両が略平坦な路面を略直進していることが判定されている場合に、横加速度に基づいて車両が片荷状態であることを判定するようにしているため、走行中の車両の片荷状態を正確に判定することができる。要するに、請求項1に係る発明によれば、簡素な構成で走行中の車両の片荷状態を正確に判定することができる。
【0021】
車両の旋回時に車速が変化すると、旋回により当該車両に加わる遠心力が変化することによりヨーレイトが変化する。一方、車両が傾斜路面を直進している場合、上述した車両の車幅方向の傾きに起因する重力による横加速度を打ち消すために、操舵による規範ヨーレイトが生じている。ここで、規範ヨーレイトは、操舵角及び車速に相関する。そのため、車両が傾斜路面を走行している場合に車速が変化すると、規範ヨーレイトが変化し、ひいては車両のヨーレイトが変化する。
【0022】
よって、請求項2に係る発明のように、車両の加速中又は減速中の相異なる複数の車速におけるヨーレイトの絶対値が全て所定の閾ヨーレイト以下である場合に、車両が略平坦な路面を略直進していると判定することができる。
【0023】
多くの場合、車両には、ヨーレイトセンサなどのヨーレイト検出手段や車速センサなどの車速検出手段が搭載されているため、上述の如くヨーレイトに基づいて車両の走行状態を判定することにより、車両の走行状態を判定する専用の検出手段を新たに車両に搭載することなく、走行状態判定手段を簡素に構成することができる。
【0024】
車両が旋回している場合には、旋回により当該車両に加わる遠心力を打ち消すために、また、車両が傾斜路面を直進している場合には、車両の車幅方向の傾きに起因する重力による横加速度を打ち消すために、規範ヨーレイトが生じている。上述したように、規範ヨーレイトは、操舵角及び車速に相関する。そのため、車速が変化すると、規範ヨーレイトが変化し、これを補償すべく操舵がなされて操舵角が変化する。
【0025】
よって、請求項3に係る発明のように、車両の加速中又は減速中の相異なる複数の車速における操舵角の絶対値が全て所定の閾操舵角以下である場合に、車両が略平坦な路面を略直進していると判定することができる。
【0026】
多くの場合、車両には、舵角センサなどの舵角検出手段や車速センサなどの車速検出手段が搭載されているため、上述の如く操舵角に基づいて車両の走行状態を判定することにより、車両の走行状態を判定する専用の検出手段を新たに車両に搭載することなく、走行状態判定手段を簡素に構成することができる。
【0027】
片荷状態では車両が車幅方向に傾くため、横加速度が大きくなる。ここで、上述したように、多くの場合、車両には、横Gセンサなどの横加速度検出手段が搭載されている。よって、請求項4に係る発明のように、横加速度検出手段により検出された横加速度が所定の閾横加速度以上である場合に、車両が片荷状態であることを判定することにより、片荷判定手段を簡素に構成することができる。
【0028】
車両に積載された積荷の車幅方向の偏りが大きくなるほど、車両の車幅方向の傾きが大きくなり、重力による車幅方向の加速度である横加速度が大きくなる。よって、請求項5に係る発明のように、横加速度が大きいほど、車両に積載された積荷の車幅方向の偏りが大きいことを判定することができる。また、この判定結果に基づいて、片荷状態による横転危険性を定量化することができるため、例えば、横転危険性に応じて、横転抑制制御の介入閾値を設定したり、運転者に横転危険性を報知する警報レベルを設定したりすることができる。
【0029】
請求項6及び7に係る発明によれば、横加速度検出手段により検出された横加速度と、遠心加速度算出手段により算出された遠心加速度との差である横加速度差に基づいて車両が片荷状態であることを判定する。このように、片荷状態の判定に横加速度差を用いることによって、横加速度から遠心加速度成分を排除して、横加速度に基づく片荷状態の判定精度をより向上させることができる。
【0030】
なお、本発明の片荷判定装置は、走行中の車両の片荷状態を判定する装置であるため、車両の走行中に積荷が荷崩れを起こした場合であっても、車両を停止させることなく、走行中に片荷状態の変化を判定することが可能となっている。
【0031】
以上のように、本発明によれば、簡素な構成で走行中の車両の片荷状態を正確に判定し得る片荷判定装置を提供することができる。
【図面の簡単な説明】
【0032】
【図1】第1実施形態の片荷判定装置を装備した車両を模式的に説明する説明図である。
【図2】第1実施形態の片荷判定装置の構成を説明するブロック図である。
【図3】Gセンサによる横加速度の検出を説明する説明図であって、(a)は平坦路面を直進している車両がロールしている状況、(b)は傾斜路面を直進している車両がロールしていない状況を示している。
【図4】車両の走行状況を説明する説明図であって、(a)は車両が平坦路面を直進している状況、(b)は車両が平坦路面をカーブ走行している状況、(c)は車両が傾斜路面をカーブ走行している状況、(d)は車両が傾斜路面を直進している状況を示している。
【図5】第1実施形態におけるヨーレイトの絶対値の経時変化を示すグラフである。
【図6】第1実施形態において片荷判定を実行するためのフローチャートである。
【図7】第2実施形態において片荷判定を実行するためのフローチャートである。
【図8】第2実施形態における操舵角の絶対値の経時変化を示すグラフである。
【図9】従来の片荷判定装置を備えるロールオーバ防止装置を装備した車両を模式的に説明する説明図である。
【発明を実施するための形態】
【0033】
以下、本発明の片荷判定装置の実施形態について図面を参照しつつ詳しく説明する。
<第1実施形態>
(1)片荷判定装置1の構成
図1は、片荷判定装置1を装備した車両20(例えば、トラック)を後方からみた状況を模式的に示している。図1に示すように、車両20は、Gセンサ2(横加速度検出手段)と、ヨーレイトセンサ3(ヨーレイト検出手段)と、車速センサ4(車速検出手段)と、舵角センサ5(舵角検出手段)と、ECU6(電子コントロールユニット)と、エンジンコントローラ7と、ブレーキコントローラ8と、警報器9とを備えている。ロールオーバ防止装置30は、車両20に備わるこれら全ての部品によって構成されている。
【0034】
図2に示すように、ECU6は、横加速度算出部10(横加速度検出手段)と、遠心加速度算出部11(遠心加速度算出手段)と、横加速度差算出部12(横加速度差算出手段)と、ヨーレイト判定部13(走行状態判定手段)と、操舵角判定部14(走行状態判定手段)と、片荷判定部15(片荷判定手段)と、片荷レベル算出部16(片荷判定手段)と、介入閾値設定部17と、警報レベル設定部18と、横転抑制制御部19とを備えている。
【0035】
本実施形態において、片荷判定装置1は、車両20の横転を抑制するロールオーバ防止装置30の一部であり、Gセンサ2と、ヨーレイトセンサ3と、車速センサ4と、ECU6内の横加速度算出部10と、遠心加速度算出部11と、横加速度差算出部12と、ヨーレイト判定部13と、片荷判定部15と、片荷レベル算出部16とにより構成されている。なお、本実施形態においては、舵角センサ5及び操舵角判定部14を使用していないため説明を省略する。
【0036】
Gセンサ2は、車両20に作用する加速度を検出するセンサであり、X、Y、Zの3方向の加速度Gx、Gy、Gzからなる加速度Gを検出できるセンサである。Gセンサ2は、X方向を車体21の前後方向、Y方向を車体21の車幅方向、Z方向を車体21の上下方向に向けた状態で、車体21の重心位置に取り付けられている。
【0037】
図3(a)に示すように、車両20が横断勾配が水勾配程度に小さい平坦な路面R(以下、平坦路面と呼ぶ)を直進している状況において、車両20の荷台に積荷Pが車幅方向に偏って積載されているとき、車体21が水平に対してロール角度θで傾いている。このとき、横加速度Gy=Gg・sinθ(Ggは重力加速度)で算出される。
【0038】
また、図3(b)に示すように、車両20が横断勾配の大きい路面R(以下、傾斜路面と呼ぶ)を直進している状況において、車両20が空荷の状態で、車体21がロールしてないとき、横加速度Gy=Gg・sinβ(βは水平に対する路面傾斜角度)で算出される。
【0039】
ここで、ロール角度θ=路面傾斜角度βであるときには、横加速度Gyが同じ値となる。したがって、横加速度Gyの値のみから、横加速度Gyが車体21のロール角度θによって発生しているのか、又は路面傾斜角度βによって発生しているのかを区別することはできない。
【0040】
ヨーレイトセンサ3は、車両20のヨーレイトγ(車体21の回転角速度)を検出するセンサであり、ヨーレイトセンサ3の軸を車体21の上下方向に合わせた状態で、Gセンサ2と同位置である車体21の重心位置に取り付けられている。
【0041】
車速センサ4は、車両20の左右の車輪22、22にそれぞれ一つずつ設置されており、車輪22の回転状態を検出することにより車速Vを検出するセンサである。
【0042】
Gセンサ2、ヨーレイトセンサ3及び車速センサ4の詳細構造等については、標準的なロールオーバ防止装置や、標準的な横滑り防止装置を装備した車両において公知であるため説明を省略する。
【0043】
横加速度算出部10は、Gセンサ2で検出される3方向の加速度Gx、Gy、Gzから横加速度Gyのみを抽出する部分である。横加速度Gyには、車体21のロールや路面傾斜によって発生する車体21の傾斜に応じて重力加速度Ggを車幅方向にベクトル分解した傾斜成分と、車両20がカーブ走行することによって発生する遠心力による車幅方向の遠心加速度成分とが含まれている。
【0044】
遠心加速度算出部11は、ヨーレイトγと車速Vとを掛け合わせて車幅方向の遠心加速度Vγを算出する部分である。
【0045】
横加速度差算出部12は、上述した横加速度Gyから遠心加速度Vγを差し引いて横加速度差Gsを算出する部分である。横加速度差Gsには、上述した傾斜成分のみが含まれており、上述した遠心加速度成分は排除されている。
【0046】
ヨーレイト判定部13は、車両20の加速中又は減速中に相異なる複数の車速Vにおけるヨーレイトγの絶対値が全て所定の閾ヨーレイトγk以下であるか否かを判定して、ヨーレイトγの絶対値が全て所定の閾ヨーレイトγk以下である場合に、車両20が略平坦な路面を略直進していることを判定する部分である。
【0047】
片荷判定部15は、ヨーレイト判定部13により車両20が略平坦な路面を略直進していることが判定されている場合に、横加速度差Gsに基づいて車両20が片荷状態であることを判定する部分である。
【0048】
片荷レベル算出部16は、相異なる複数の車速Vにおいて算出された全ての横加速度差Gsの絶対値を平均化した平均値Gsaに基づいて、平均値Gsaが大きいほど、車両20に積載された積荷Pの車幅方向の偏りが大きいことを判断して、大きな片荷レベルKを設定する部分である。
【0049】
介入閾値設定部17は、片荷レベル算出部16で設定した片荷レベルKに応じて横転抑制制御部19が横転抑制制御を行う際の介入閾値を設定する部分である。
【0050】
警報レベル設定部18は、片荷レベル算出部16で設定した片荷レベルKに応じて警報器9が報知する警報のレベル(例えば、警報音の大きさ)を設定する部分である。
【0051】
横転抑制制御部19は、介入閾値設定部17で設定された介入閾値を反映して、エンジンコントローラ7を介して燃料供給量を減少させると共に、ブレーキコントローラ8を介してブレーキを作動させる部分である。これにより、車速Vが低下して、旋回中の車両20に発生する遠心力が低下してロールが小さくなり、車両20の横転を抑制することができる。
【0052】
(2)ヨーレイト判定部13の作動
横加速度差Gsに基づいて車両20が片荷状態であることを判定できるのは、横加速度差Gsに、片荷状態によって発生するロールによる傾斜成分以外の加速度成分がほとんど含まれていない状況に限定される。したがって、車両20がこのような限定された走行状況で走行しているか否かを走行状態判定手段であるヨーレイト判定部13により判定する。
【0053】
上述したように、横加速度差Gsは、横加速度Gyから遠心加速度Vγを差し引いた値であるため、横加速度差Gsには、横加速度Gyの傾斜成分のみが含まれており、横加速度Gyの遠心加速度成分は排除されている。しかし、横加速度Gyの遠心加速度成分が排除できたとしても、遠心力によって実際に車体21に発生するロールが排除できるわけではない。
【0054】
したがって、横加速度差Gsに基づいて車両20が片荷状態であることを判定できるのは、車両20に大きな遠心力が作用しない走行状況、すなわち、直線道路を直進している状況や、緩い曲線道路をカーブ走行している状況や、ごく低速での右左折などに限定される。
【0055】
また、図3(b)に示したような車両20が傾斜路面を走行している状況も、横加速度差Gsに、路面傾斜角度βによる傾斜成分が含まれてしまうため、横加速度差Gsに基づいて車両20が片荷状態であることを判定することができない。
【0056】
本実施形態においては、ヨーレイト判定部13によって、様々な走行状況の中から、車両20に大きな遠心力が作用することなく、車両20が平坦路面を走行している状況を判定することが可能である。以下にヨーレイト判定部13の作動について詳述する。
【0057】
図4に示す車両20の様々な走行状況において、図4(a)は通常の走行で多くみられる平坦路面を直進している走行状況a、図4(b)は山道や交差点での右左折などのように平坦路面をカーブ走行している走行状況b、図4(c)は高速道路のようにバンクのある傾斜路面をカーブ走行している走行状況c、図4(d)は工場や荷役施設などの施設内道路で遭遇することがある傾斜路面を直進している走行状況dを示している。
【0058】
走行状況a〜dにおいて、車両20に大きな遠心力が作用することなく、車両20が平坦路面を走行している状況は、走行状況aと、走行状況bにおいてカーブが緩い(カーブ半径が大きい)場合やごく低速で走行している状況とに限定される。
【0059】
走行状況a〜dにおいて、車両20の加速又は減速により車速VがV1、V2、…と変化したとき、走行状況aにおいては、ヨーレイトγがほとんど変化せずγ≒0である。また、走行状況bにおいては、たとえ路面Rのカーブ半径が一定であったとしても、車速Vの変化によってヨーレイトγが変化する。
【0060】
また、走行状況cにおいては、路面Rのカーブに沿った走行軌道Lで走行する際に、ヨーレイトγが発生することなくハンドルがぶれることなく走行できる最適な車速V1が1つ定まる。しかし、この最適な車速V1から減速すれば、車両20はカーブの内側に向かう走行軌道Liに向かおうとするため、車両20が走行軌道Lを維持するために、ハンドルを山側に切る動作を繰り返す必要があり、ヨーレイトγが変化する。一方、この最適な車速V1から加速すれば、車両20はカーブの外側に向かう走行軌道Loに向かおうとするため、車両20が走行軌道Lを維持するために、ハンドルを谷側に切る動作を繰り返す必要があり、ヨーレイトγが変化する。
【0061】
また、走行状況dにおいては、車速Vの変化によらず、常に車両20が谷側に向かう走行軌道Liに向かおうとするため、常にハンドルを山側に切る動作を繰り返す必要があり、常にヨーレイトγが変化する。
【0062】
このように、車両20の車速Vを変化させたのときのヨーレイトγの変化は、走行状況a〜d毎に異なる特徴を示す。ヨーレイト判定部13は、このような走行状況毎に異なるヨーレイトγの変化の特徴を利用して走行状況の判定を行っている。
【0063】
図5に車速VがV1→V2→V3→V4→V5と減速したときのヨーレイトγの絶対値の経時変化の一例を示す。図5において、a1、b1、c1及びd1は、それぞれ走行状況a、b、c及びdにおけるヨーレイトγの経時変化を示している。γkは、ヨーレイトγの判定基準として適宜設定する所定の閾ヨーレイトである。
【0064】
図5に示すように、走行状況a及びbの全てのヨーレイトγの絶対値は、閾ヨーレイトγk以下の値となっている。このとき、ヨーレイト判定部13は、車両20が大きな遠心力が作用することなく、平坦路面を走行していると判定する。また、走行状況c及びdにおいては、相異なる複数の車速Vにおけるヨーレイトγの絶対値が、閾ヨーレイトγkを上回っている。このとき、ヨーレイト判定部13は、車両20が大きな遠心力が作用する状況か、傾斜路面を走行している状況であると判定する。
【0065】
ここで、閾ヨーレイトγkをさらに小さく設定すれば、走行状況bのヨーレイトγも閾ヨーレイトγkを上回ることとなる。すなわち、閾ヨーレイトγkの設定により、走行状況bの中からカーブが緩い場合やごく低速で走行している状況を抽出することが可能となる。
【0066】
以上のように、ヨーレイト判定部13によって、車両20の加速中又は減速中に相異なる複数の車速Vにおけるヨーレイトγの絶対値が全て所定の閾ヨーレイトγk以下であるか否かを判定することにより、様々な走行状況の中から、車両20に大きな遠心力が作用することなく、車両20が平坦路面を走行している状況を判定することが可能となる。すなわち、車両20が略平坦な路面を略直進していることを判定することが可能となる。
【0067】
(3)片荷判定装置1の作動ステップ
本実施形態における片荷判定装置1によって片荷判定を実行するためのフローチャートを図6に示す。車両20の走行中において、図6に示すSTARTからENDまでの一連の片荷判定フローが実行され、ENDとなった後に再びSTARTに戻って片荷判定フローが繰り返される。
【0068】
ステップS1において、アクセル操作又はブレーキ操作があるか否かの判定を行う。すなわち、車両20が加速中又は減速中であるか否かの判定を行う。ここで、アクセル操作又はブレーキ操作がない場合にはENDに進み、操作がある場合にはステップS2に進む。
【0069】
ステップS2において、車速センサ4により車速Vを検出し、ステップS3において、車速Vが相異なる複数の車速V1、V2、…、Vnのいずれかに一致するか否かの判定を行う。そして、車速Vが一致していない場合にはステップS4に進み、一致している場合にはステップS5及びS7に進む。
【0070】
なお、相異なる複数の車速V1、V2、…、Vnの設定は、例えば、始めに検出した車速Vを車速V1として、車速V1から5〜10km/h刻みで車速V2、…、Vnを設定するとよい。車速V1、V2、…、Vnの設定個数nは、少なくともn=3とする必要があり、n=5程度とすることが好ましい。
【0071】
ステップS4において、ステップS2及びS3を繰り返し実行するのに費やした時間が所定時間に納まっているか否かの判定を行う。所定時間経過していない場合にはステップS2に戻り、所定時間経過している場合にはENDに進む。このようにステップS4において、経過時間の判定を行うことにより、車両20が走行する路面の状況や、車両20の加速又は減速の状況が大きく変化した場合に、片荷判定フローを一時リセットすることが可能となる。これにより、片荷判定をより正確に行うことが可能となる。
【0072】
ステップS5において、Gセンサ2により加速度Gを検出し、ステップS6において、加速度Gから車幅方向の横加速度Gyのみを抽出する。その後、ステップS9に進む。ステップS5及びS6は、横加速度算出部10によって実行される。
【0073】
ステップS7において、ヨーレイトセンサ3によりヨーレイトγを検出し、ステップS8において、車速Vとヨーレイトγを掛け合わして車幅方向の遠心加速度Vγを算出する。その後、ステップS9に進む。ステップS8は、遠心加速度算出部11によって実行される。
【0074】
ステップS9において、横加速度Gyから遠心加速度Vγを差し引いて横加速度差Gsを算出する。その後、ステップS10に進む。ステップS9は、横加速度差算出部12によって実行される。
【0075】
ステップS10において、設定した車速V1、V2、…、Vnに対応した横加速度差Gsが全て算出されたか否かの判定を行う。全ての横加速度差Gsが算出されていない場合にはステップS4に進み、ステップS2〜S10を繰り返し実行するのに費やした時間が所定時間に納まっているか否かの判定を行う。全ての横加速度差Gsが算出された場合にはステップS11に進む。
【0076】
ステップS11において、設定した車速V1、V2、…、Vnに対応したヨーレイトγの絶対値が全て所定の閾ヨーレイトγk以下であるか否かの判定を行う。ヨーレイトγの絶対値が全て所定の閾ヨーレイトγk以下となっていない場合にはENDに進み、閾ヨーレイトγk以下となっている場合には片荷状態を判定することが可能であると判定してステップS12に進む。ステップS11は、ヨーレイト判定部13と片荷判定部15とによって実行される。
【0077】
ステップS12において、全ての横加速度差Gsの絶対値を平均化した平均値Gsaを算出し、平均値Gsaに基づいて片荷レベルKを算出する。その後、ステップS13に進む。ここで、図6に示すように、平均値Gsaと片荷レベルKとの関係を、平均値Gsaがある程度大きい値となるまでは片荷レベルK=0とし、その後、平均値Gsaの増加に合わせて片荷レベルKを増加させ、その後、平均値Gsaがある程度大きい値となった以降は片荷レベルKを最大値にするとよい。片荷レベルKが最大値となったときには、車両20の横転危険性がかなり高まっていることとなる。ステップS12は、片荷レベル算出部16によって実行される。
【0078】
ステップS13において、片荷レベルKに応じて横転抑制制御の介入閾値を設定する。その後、ステップS14に進む。ステップ13は、介入閾値設定部17によって実行される。ここで設定された介入閾値が横転抑制制御部19に送られる。
【0079】
ステップS14において、片荷レベルKに応じて警報レベルを設定する。その後、ENDに進む。ステップ14は、警報レベル設定部18によって実行される。ここで設定された警報レベルが運転者に横転危険性を報知する警報機9の警報レベルとして反映される。
【0080】
(4)片荷判定装置1の効果
このような本実施形態の構成によれば、片荷判定装置1に備わるセンサは、Gセンサ2、ヨーレイトセンサ3及び車速センサ4の3つのみである。したがって、特許文献1に記載のロールオーバ防止装置60に備わる車高センサ61L、61Rのようなロール角度を算出するための専用のセンサは不要であり、車両20の状態を検出する各センサの構成が簡素である。よって、片荷判定装置1を簡素に構成することができるため、片荷判定装置1を低コストで提供することができる。
【0081】
また、標準的なロールオーバ防止装置や、標準的な横滑り防止装置を装備した車両においては、Gセンサ2、ヨーレイトセンサ3及び車速センサ4が既に備わっている。この場合、本実施形態の片荷判定装置1を導入するの際して新たなセンサを装備する必要がないため経済的である。
【0082】
また、本実施形態の構成によれば、Gセンサ2の検出信号により算出される横加速度Gyから、ヨーレイトγ及び車速Vの積として求まる遠心加速度Vγを差し引いた横加速度差Gsに基づいて車両20が片荷状態であることを判定する。このように、片荷状態の判定に横加速度差Gsを用いることによって、横加速度Gyから遠心加速度成分を排除して、横加速度Gyに基づく片荷状態の判定精度をより向上させることができる。
【0083】
また、本実施形態の構成によれば、全ての横加速度差Gsの絶対値を平均化した平均値Gsaが大きいほど、車両20に積載された積荷の車幅方向の偏りが大きいと判定する。この判定結果に基づいて、片荷状態による横転危険性を定量化する片荷レベルKを設定することができるため、例えば、片荷レベルKに応じて、横転抑制制御の介入閾値を設定したり、運転者に横転危険性を報知する警報レベルを設定したりすることができる。
【0084】
<第2実施形態>
(1)片荷判定装置の構成
上述した第1実施形態においては、車両20の車速Vを変化させたのときのヨーレイトγの変化により車両20の走行状況を判定していたのに対して、本実施形態においては、車両20の車速Vを変化させたのときの操舵角δの変化により車両20の走行状況を判定する点で異なる。
【0085】
また、上述した第1実施形態においては、横加速度差Gsに基づいて車両20が片荷状態であることを判定していたのに対して、本実施形態においては、横加速度Gyに基づいて車両20が片荷状態であることを判定する点で異なる。
【0086】
本実施形態の片荷判定装置の構成を図1及び2を用いて説明する。本実施形態の片荷判定装置は、Gセンサ2(横加速度検出手段)と、車速センサ4(車速検出手段)と、舵角センサ5(舵角検出手段)と、ECU6内の横加速度算出部10(横加速度検出手段)と、操舵角判定部14(走行状態判定手段)と、片荷判定部15(片荷判定手段)と、片荷レベル算出部16(片荷判定手段)とにより構成されている。
【0087】
すなわち、本実施形態においては、第1実施形態の片荷判定装置1で使用していたヨーレイトセンサ3、遠心加速度算出部11、横加速度差算出部12及びヨーレイト判定部13を使用していない。なお、図2のブロック図には明示されていないが、横加速度算出部10により算出された横加速度Gyは、片荷判定部15に送られる。
【0088】
以降、第1実施形態において説明していない舵角センサ5及び操舵角判定部14の構成についてのみ説明する。
【0089】
舵角センサ5は、車両20のハンドルの切れ角(操舵角δ)を検出するセンサであり、図示しないステアリングシャフトに取り付けられている。舵角センサ5の詳細構造等については、標準的なロールオーバ防止装置や、標準的な横滑り防止装置を装備した車両において公知であるため説明を省略する。
【0090】
操舵角判定部14は、車両20の加速中又は減速中に相異なる複数の車速Vにおける操舵角δの絶対値が全て所定の閾操舵角δk以下であるか否かを判定して、操舵角δの絶対値が全て所定の閾操舵角δk以下である場合に、車両20が略平坦な路面を略直進していることを判定する部分である。
【0091】
なお、後述する操舵角判定部14の作動によって、車両20に大きな遠心力が作用しない走行状況を判定できる。このような走行状況においては、横加速度差Gsと横加速度Gyとの値の差はわずかである。よって、横加速度差Gsに基づいて車両20が片荷状態であることを判定する代わりに、横加速度Gyに基づいて車両20が片荷状態であることを判定することもできる。
【0092】
(2)操舵角判定部14の作動
操舵角判定部14の作動は、第1実施形態において述べたヨーレイト判定部13の作動と類似しているため、説明を一部簡略化する。
【0093】
図4に示した走行状況a〜dにおいて、車両20の加速又は減速により車速VがV1、V2、…と変化したとき、走行状況aにおいては、操舵角δがほとんど変化せずδ≒0である。また、走行状況bにおいては、路面Rのカーブ半径が一定の場合には、車速Vの変化によらず操舵角δは一定である。
【0094】
また、走行状況cにおいては、路面Rのカーブに沿った走行軌道Lで走行する際に、ハンドルがぶれることなく操舵角δ=0で走行できる最適な車速V1が1つ定まる。しかし、この最適な車速V1から車速Vが変化すれば、ハンドルを山側又は谷側に切る動作を繰り返す必要があり、操舵角δが変化する。また、走行状況dにおいては、車速Vの変化によらず、常に車両20が谷側に向かう走行軌道Liに向かおうとするため、常にハンドルを山側に切る動作を繰り返す必要があり、常に操舵角δが変化する。
【0095】
このように、車両20の車速Vを変化させたのときの操舵角δの変化は、走行状況a〜d毎に異なる特徴を示す。操舵角判定部14は、このような走行状況毎に異なる操舵角δの変化の特徴を利用して走行状況の判定を行っている。
【0096】
図8に車速VがV1→V2→V3→V4→V5と減速したときの操舵角δの絶対値の経時変化の一例を示す。図8において、a2、b2、c2及びd2は、それぞれ走行状況a、b、c及びdにおける操舵角δの経時変化を示している。δkは、操舵角δの判定基準として適宜設定する所定の閾操舵角である。
【0097】
図8に示すように、走行状況a及びbの全ての操舵角δの絶対値は、閾操舵角δk以下の値となっている。このとき、操舵角判定部14は、車両20が大きな遠心力が作用することなく、平坦路面を走行していると判定する。また、走行状況c及びdにおいては、相異なる複数の車速Vにおける操舵角δの絶対値が、閾操舵角δkを上回っている。このとき、操舵角判定部14は、車両20が大きな遠心力が作用する状況か、傾斜路面を走行している状況であると判定する。
【0098】
ここで、閾操舵角δkをさらに小さく設定すれば、走行状況bの操舵角δも閾操舵角δkを上回ることとなる。すなわち、閾操舵角δkの設定により、走行状況bの中からカーブが緩い場合やごく低速で走行している状況を抽出することが可能となる。
【0099】
以上のように、操舵角判定部14によって、車両20の加速中又は減速中に相異なる複数の車速Vにおける操舵角δの絶対値が全て所定の閾操舵角δk以下であるか否かを判定することにより、様々な走行状況の中から、車両20に大きな遠心力が作用することなく、車両20が平坦路面を走行している状況を判定することが可能となる。すなわち、車両20が略平坦な路面を略直進していることを判定することが可能となる。
【0100】
(3)片荷判定装置の作動ステップ
本実施形態における片荷判定装置によって片荷判定を実行するためのフローチャートを図7に示す。本実施形態における片荷判定装置の作動ステップは、第1実施形態において述べた片荷判定装置1の作動ステップと類似しているため、説明を一部簡略化する。
【0101】
本実施形態におけるステップSS1〜SS6は、第1実施形態におけるステップS1〜S6と同一であるため説明を省略する。ステップSS3において、車速Vが相異なる複数の車速V1、V2、…、Vnのいずれかに一致している場合にはステップSS5及びSS7に進む。
【0102】
ステップSS7において、舵角センサ5により操舵角δを検出した後、ステップSS8に進む。ステップSS8において、設定した車速V1、V2、…、Vnに対応した横加速度Gyが全て算出されたか否かの判定を行う。全ての横加速度Gyが算出されていない場合にはステップSS4に進み、ステップSS2〜SS10を繰り返し実行するのに費やした時間が所定時間に納まっているか否かの判定を行う。全ての横加速度Gyが算出された場合にはステップSS9に進む。
【0103】
ステップSS9において、設定した車速V1、V2、…、Vnに対応した操舵角δの絶対値が全て所定の閾操舵角δk以下であるか否かの判定を行う。操舵角δの絶対値が全て所定の閾操舵角δk以下となっていない場合にはENDに進み、閾操舵角δk以下となっている場合には片荷状態を判定することが可能であると判定してステップSS10に進む。ステップSS9は、操舵角判定部14と片荷判定部15とによって実行される。
【0104】
ステップSS10において、全ての横加速度Gyの絶対値を平均化した平均値Gyaを算出し、平均値Gyaに基づいて片荷レベルKを算出する。その後、ステップSS11に進む。ここで、図7に示す平均値Gyaと片荷レベルKとの関係は、図6で示した平均値Gsaと片荷レベルKとの関係と類似しているため説明を省略する。ステップSS10は、片荷レベル算出部16によって実行される。
【0105】
本実施形態におけるステップSS11及びSS12は、第1実施形態におけるステップS13及びS14と同一であるため説明を省略する。
【0106】
(4)片荷判定装置の効果
このような本実施形態の構成によれば、片荷判定装置に備わるセンサは、Gセンサ2、舵角センサ5及び車速センサ4の3つのみである。したがって、第1実施形態と同様に、車両20の状態を検出する各センサの構成が簡素である。よって、片荷判定装置を簡素に構成することができるため、片荷判定装置を低コストで提供することができる。
【0107】
また、標準的なロールオーバ防止装置や、標準的な横滑り防止装置を装備した車両においては、Gセンサ2、舵角センサ5及び車速センサ4が既に備わっている。この場合、本実施形態の片荷判定装置を導入するの際して新たなセンサを装備する必要がないため経済的である。
【0108】
また、本実施形態の構成によれば、全ての横加速度Gyの絶対値を平均化した平均値Gyaが大きいほど、車両20に積載された積荷の車幅方向の偏りが大きいと判定する。したがって、第1実施形態と同様に、例えば、片荷レベルKに応じて、横転抑制制御の介入閾値を設定したり、運転者に横転危険性を報知する警報レベルを設定したりすることができる。
【0109】
<その他の実施形態>
本発明の片荷判定装置は、上述した実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において、当業者が行い得る変更、改良等を施した種々の形態にて実施することができることは言うまでもない。
【0110】
例えば、第1実施形態においては、車両20の車速Vを変化させたのときのヨーレイトγの変化により車両20の走行状況を判定しているが、これに代えて、第2実施形態のように、車両20の車速Vを変化させたのときの操舵角δの変化により車両20の走行状況を判定する構成としてもよい。
【0111】
また、第1実施形態においては、横加速度差Gsに基づいて車両20が片荷状態であることを判定しているが、これに代えて、第2実施形態のように、横加速度Gyに基づいて車両20が片荷状態であることを判定する構成としてもよい。
【0112】
また、第1及び第2実施形態において、車両20の車速Vを変化させたのときのヨーレイトγ及び操舵角δの双方の変化により車両20の走行状況を判定することにより、片荷判定の精度をさらに高めることもできる。
【符号の説明】
【0113】
1 … 片荷判定装置
2 … Gセンサ(横加速度検出手段)
3 … ヨーレイトセンサ(ヨーレイト検出手段)
4 … 車速センサ(車速検出手段)
5 … 舵角センサ(舵角検出手段)
10 … 横加速度算出部(横加速度検出手段)
11 … 遠心加速度算出部(遠心加速度算出手段)
12 … 横加速度差算出部(横加速度差算出手段)
13 … ヨーレイト判定部(走行状態判定手段)
14 … 操舵角判定部(走行状態判定手段)
15 … 片荷判定部(片荷判定手段)
16 … 片荷レベル算出部(片荷判定手段)
20 … 車両
Gy … 横加速度 Gs … 横加速度差
P … 積荷 V … 車速
γ … ヨーレイト γk … 閾ヨーレイト
δ … 操舵角 δk … 閾操舵角
【特許請求の範囲】
【請求項1】
車両に積載された積荷が車幅方向に偏っている片荷状態を判定する片荷判定装置において、
前記車両の車幅方向の加速度である横加速度を検出する横加速度検出手段と、
前記車両が略平坦な路面を略直進していることを判定する走行状態判定手段と、
前記走行状態判定手段により前記車両が略平坦な路面を略直進していることが判定されている場合に、前記横加速度に基づいて前記車両が片荷状態であることを判定する片荷判定手段と、
を備えていることを特徴とする片荷判定装置。
【請求項2】
前記車両のヨーレイトを検出するヨーレイト検出手段と、
前記車両の車速を検出する車速検出手段と、を備え、
前記走行状態判定手段は、前記車速検出手段により検出された車速及び前記ヨーレイト検出手段により検出されたヨーレイトに基づいて、前記車両の加速中又は減速中の相異なる複数の車速におけるヨーレイトの絶対値が全て所定の閾ヨーレイト以下である場合に、該車両が略平坦な路面を略直進していることを判定する
請求項1に記載の片荷判定装置。
【請求項3】
前記車両の操舵角を検出する舵角検出手段と、
前記車両の車速を検出する車速検出手段と、を備え、
前記走行状態判定手段は、前記車速検出手段により検出された車速及び前記舵角検出手段により検出された操舵角に基づいて、前記車両の加速中又は減速中の相異なる複数の車速における操舵角の絶対値が全て所定の閾操舵角以下である場合に、該車両が略平坦な路面を略直進していることを判定する
請求項1又は2に記載の片荷判定装置。
【請求項4】
前記片荷判定手段は、前記横加速度検出手段により検出された横加速度が所定の閾横加速度以上である場合に、前記車両が片荷状態であることを判定する
請求項1から3のうちのいずれか一項に記載の片荷判定装置。
【請求項5】
前記片荷判定手段は、前記横加速度検出手段により検出された横加速度が大きいほど、前記車両に積載された積荷の車幅方向の偏りが大きいことを判定する
請求項1から4のうちのいずれか一項に記載の片荷判定装置。
【請求項6】
前記車両のヨーレイトを検出するヨーレイト検出手段と、
前記車両の車速を検出する車速検出手段と、
前記ヨーレイト検出手段により検出されたヨーレイト及び前記車速検出手段により検出された車速に基づいて、該ヨーレイト及び該車速の積を、遠心加速度として算出する遠心加速度算出手段と、
前記横加速度検出手段により検出された横加速度及び前記遠心加速度算出手段により算出された遠心加速度に基づいて、前記横加速度と前記遠心加速度との差を、横加速度差として算出する横加速度差算出手段と、を備え、
前記片荷判定手段は、前記横加速度差が所定の閾横加速度差以上である場合に、前記車両が片荷状態であることを判定する
請求項1から5のうちのいずれか一項に記載の片荷判定装置。
【請求項7】
前記車両のヨーレイトを検出するヨーレイト検出手段と、
前記車両の車速を検出する車速検出手段と、
前記ヨーレイト検出手段により検出されたヨーレイト及び前記車速検出手段により検出された車速に基づいて、該ヨーレイト及び該車速の積を、遠心加速度として算出する遠心加速度算出手段と、
前記横加速度検出手段により検出された横加速度及び前記遠心加速度算出手段により算出された遠心加速度に基づいて、前記横加速度と前記遠心加速度との差を、横加速度差として算出する横加速度差算出手段と、を備え、
前記片荷判定手段は、前記横加速度差が大きいほど、前記車両に積載された積荷の車幅方向の偏りが大きいことを判定する
請求項1から6のうちのいずれか一項に記載の片荷判定装置。
【請求項1】
車両に積載された積荷が車幅方向に偏っている片荷状態を判定する片荷判定装置において、
前記車両の車幅方向の加速度である横加速度を検出する横加速度検出手段と、
前記車両が略平坦な路面を略直進していることを判定する走行状態判定手段と、
前記走行状態判定手段により前記車両が略平坦な路面を略直進していることが判定されている場合に、前記横加速度に基づいて前記車両が片荷状態であることを判定する片荷判定手段と、
を備えていることを特徴とする片荷判定装置。
【請求項2】
前記車両のヨーレイトを検出するヨーレイト検出手段と、
前記車両の車速を検出する車速検出手段と、を備え、
前記走行状態判定手段は、前記車速検出手段により検出された車速及び前記ヨーレイト検出手段により検出されたヨーレイトに基づいて、前記車両の加速中又は減速中の相異なる複数の車速におけるヨーレイトの絶対値が全て所定の閾ヨーレイト以下である場合に、該車両が略平坦な路面を略直進していることを判定する
請求項1に記載の片荷判定装置。
【請求項3】
前記車両の操舵角を検出する舵角検出手段と、
前記車両の車速を検出する車速検出手段と、を備え、
前記走行状態判定手段は、前記車速検出手段により検出された車速及び前記舵角検出手段により検出された操舵角に基づいて、前記車両の加速中又は減速中の相異なる複数の車速における操舵角の絶対値が全て所定の閾操舵角以下である場合に、該車両が略平坦な路面を略直進していることを判定する
請求項1又は2に記載の片荷判定装置。
【請求項4】
前記片荷判定手段は、前記横加速度検出手段により検出された横加速度が所定の閾横加速度以上である場合に、前記車両が片荷状態であることを判定する
請求項1から3のうちのいずれか一項に記載の片荷判定装置。
【請求項5】
前記片荷判定手段は、前記横加速度検出手段により検出された横加速度が大きいほど、前記車両に積載された積荷の車幅方向の偏りが大きいことを判定する
請求項1から4のうちのいずれか一項に記載の片荷判定装置。
【請求項6】
前記車両のヨーレイトを検出するヨーレイト検出手段と、
前記車両の車速を検出する車速検出手段と、
前記ヨーレイト検出手段により検出されたヨーレイト及び前記車速検出手段により検出された車速に基づいて、該ヨーレイト及び該車速の積を、遠心加速度として算出する遠心加速度算出手段と、
前記横加速度検出手段により検出された横加速度及び前記遠心加速度算出手段により算出された遠心加速度に基づいて、前記横加速度と前記遠心加速度との差を、横加速度差として算出する横加速度差算出手段と、を備え、
前記片荷判定手段は、前記横加速度差が所定の閾横加速度差以上である場合に、前記車両が片荷状態であることを判定する
請求項1から5のうちのいずれか一項に記載の片荷判定装置。
【請求項7】
前記車両のヨーレイトを検出するヨーレイト検出手段と、
前記車両の車速を検出する車速検出手段と、
前記ヨーレイト検出手段により検出されたヨーレイト及び前記車速検出手段により検出された車速に基づいて、該ヨーレイト及び該車速の積を、遠心加速度として算出する遠心加速度算出手段と、
前記横加速度検出手段により検出された横加速度及び前記遠心加速度算出手段により算出された遠心加速度に基づいて、前記横加速度と前記遠心加速度との差を、横加速度差として算出する横加速度差算出手段と、を備え、
前記片荷判定手段は、前記横加速度差が大きいほど、前記車両に積載された積荷の車幅方向の偏りが大きいことを判定する
請求項1から6のうちのいずれか一項に記載の片荷判定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−171430(P2012−171430A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−33940(P2011−33940)
【出願日】平成23年2月18日(2011.2.18)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月18日(2011.2.18)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]