
物体の回転による円弧移動方法および円弧移動体

【課題】対象上を移動するため、滑る等対象の状態に左右されて、安全でない。また物体の重心を押して移動するために、出力と等価になることによる浪費を防ぐ手段を提供する。
【解決手段】出力で回転する回転体1の回転方向と逆回転方向の重心(回転軸3)に直角又は接線に加力して、加力点4を支点に回転体1全体が公転して発生した二方向の合力成分で回転体1が円弧移動して、重力下では直角(横)成分で横移動して、無重力下では二成分で合力方向に繰り返して移動することを特徴とする物体の回転による回転体1および回転体1の属する系を移動して解決する。
【解決手段】出力で回転する回転体1の回転方向と逆回転方向の重心(回転軸3)に直角又は接線に加力して、加力点4を支点に回転体1全体が公転して発生した二方向の合力成分で回転体1が円弧移動して、重力下では直角(横)成分で横移動して、無重力下では二成分で合力方向に繰り返して移動することを特徴とする物体の回転による回転体1および回転体1の属する系を移動して解決する。
【発明の詳細な説明】
【技術分野】
【0001】
出力で回転する、物体の回転による円弧移動する方法および円弧移動円弧移動体に関する。
【背景技術】
【0002】
出力で回転する物体の、回転体の移動は、その重心を押す直線の作用反作用による移動方法とされている。
【先行技術文献】
【特許文献1】 特願2005−112718
【非特許文献1】 最高裁上告文ー平成20年(行ノ)第139号
【非特許文献2】 最高裁上告文ー平成20年(行ヒ)第151号
【発明の概要】
【0003】
本願発明は、回転体を含むすべての物体がその重心を押されて、加力方向と同じ方向に移動する移動方法の他に、
物体の重心を直角又は接線を押して回転する回転体が、重心を押さずに、移動体となる移動方法の事実が、見慣れた移動方法で移動していることの発見を利用した物体の回転による円弧移動方法および円弧移動体の発明である。
【発明が解決しようとする課題】
【0004】
車両の車輪である回転体による移動は、地面等の対象上を、対象を摩擦により後方に、横方向に蹴って逆方向に移動して、制動時には逆方向に加力して移動する。とする。
そのために、対象が濡れている等で、摩擦がきかない場合は、進行あるいは制動がきかず危険である。
【0005】
すなわち、回転体による移動は、重心を押して移動する移動と同一の移動方法として、扱われて、古来対象を蹴る移動方法は、重心を押す直線の作用反作用による移動を意味して、その結果が地球温暖化の原因となる、主として人間の移動のための出力の浪費による。 その他回転体の回転による移動を、重力下にあるため回転していない物体の重心を押して移動する移動方法と同一の移動方法と混同したために、回転体本来の移動がなされていない、古来の、重心を押す物体移動と混同したことによる、出力エネルギーの浪費を招いた結果が、温暖化等の危機を来している。。
【課題を解決するための手段】
【0006】
出力を重心に受けた回転体を含むすべての物体は、加えられた力(以下加力と称す)と同じ方向に移動する。
また、物体の接線に、即ち重心と直角又は接線に加力された物体は、回転体となる。
即ち、物体は重心に直角又は接線に入力して回転体となる。
物体が入力により回転する回転体となり、回転体は回転運動はするが、その重心は移動しないで、その場で回転運動をするのみであり重心移動しない。
本願は、出力で回転運動はするが移動しないで回転する、回転しない物体が変化した回転体が、重心移動する原理を用いた発明である。
回転体を含むすべての物体の移動は、その重心を押して直線の作用反作用となる移動方法がある。
【0007】
その他に回転する物体となった移動しない回転体の移動には、逆回転方向に重心を直角又は接線を押して、加力点を支点として、回転体全体が回転(公転)して、発生した加力方向と、回転方向に直角の二方向の合力の移動成分による円弧移動原理がある。
回転体の一部分を破壊あるいは分離して、遠心力で離脱して直線移動する移動原理とがあり、重心を押す回転体を含むすべての物体の移動原理に加えて、回転体独自の二つの移動原理である。
【0008】
本願は、重心を直角又は接線を押して回転力を失って回転しない物体となる円弧移動原理を用いて課題を解決する。
物体の回転は物体の重心を押さずに、重心を直角又は接線を押して回転は得られて、回転はするが重心の移動は得られない事実であり、回転の運動原理である事実である。
回転体が移動するには、例えば摩擦により回転方向と逆方向に地面を蹴る、回転軸となる車輪の重心(中心)に直角又は車輪の接線に加力して、回転体は、加力点を支点に全体が回転して、移動軌跡は直進せず円弧移動であり、対象に依拠するすべての回転体あるいは回転要素による移動は、直進できず円弧移動であって、直進できない原理である。
直進しているようにみえるのは、回転の公転円が微細であるためである。
このことは、回転を得た回転運動する物体が、重心に直角又は接線に、回転方向と逆方向に力を加えて、加力点を支点に重心が円弧移動により回転力を失って回転しない物体(車輪)となる現象事実であり、回転する物体の回転体の回転力がなくなって、回転しない物体(車輪)となって停止する原理である。
【0009】
地面を後方に蹴って移動することは、重心を押して移動しているのではなく、回転している回転体が、地面との接点である接線に、逆方向の加力(摩擦による横方向の加力)による、加力点を支点とした全体の回転(公転)であり、直進していない現象事実である。
すなわち回転体は摩擦による横方向の加力により、加力点を支点に横下方向の円弧移動となり、その二方向の回転の合力の内の、横方向成分で移動して、下方向成分は対象(地面)で相殺されて横移動している。
【0010】
また、回転に用いる出力は人力、電力あるいは内燃機関等、その種類を問わない。
【0011】
本願は、前者の回転体の円弧移動の、原理説明実例として円弧移動は、グラインダーの発生する火花方向と逆方向に加力することにより、留め金をはずしたグラインダーは上横方向に飛んで、重力で落下する。
対象(地面)上を移動する車輪への加力方向は、摩擦により横方向となり、グラインダーの場合は、加力方向が90度ずれた直上方向となる。
したがって車輪の場合は、回転する車輪に横方向の加力により、横方向と下方向の成分で車輪は移動して、下方向成分は地面で相殺され、グラインダーの場合は、上方向の加力により、上方向と横方向の成分でグラインダーは横移動して、上方向成分は重力で落下して相殺する。
【0012】
したがって、加力方向と発生した横(直角)移動成分は、互いに作用反作用が直線とならず、直角の作用反作用となる。
前記円弧移動する原理による回転力による移動方法の発明である。
【0013】
すなわち、直線の作用反作用による従来古来の移動方法は、物体の重心を押して移動するために、出力の内の移動方向の出力成分のみを用いて移動力を得て、他の出力成分は廃棄して成り立つ。
ロケット等を例とすれば、進行方向の出力のみを用いて、他は勇ましく廃棄しており、他の内燃機関等も同種である。
本願回転体による移動は、360度方向からの出力で物体の重心に直角又は接線に入力で得られる回転力を、直角の作用反作用となる円弧移動であり、力として取り出して、ロスはない。
【0014】
すなわち物体の中心(重心)に直角又は接線に、出力で加えられた力を、円弧移動として移動力として取り出して用いる発明である。
上記原理による移動方法は、重心を押して移動する古来の移動方法の結果が来した出力の浪費が主因をなすとする、地球温暖化を、出力による物体の重心に直角又は接線への加力により回転体への入力方向の逆方向が出力であり、入力に対して出力の損失は起こらない移動方法の発明で課題を解決する。
例えれば、重心を押して10kmで慣性移動する物体を、20kmに加速するには、20kmの出力で加速しなければならない、出力と移動は等価である従来の重心を押して移動する、常識の当然の現象事実である。
【0015】
しかし、回転体の移動では、10kmで慣性移動する物体を20kmに加速するには、重心は10kmで移動しているから、後方に蹴って(加力して)重心を押すのではなく、重心を直角又は接線を押す移動であり、20kmの移動に対して10kmの慣性移動であり、同じ重心移動でありながら、10kmの加速でよいことになる。
【0016】
この現象事実は、重心を直角又は接線を押して移動する円弧移動の、回転体による移動の根本原理による発明である。
多段ロケットによる移動は、段数を増しても質量(重量)に対して爆発の出力が上限であり、重心を押さない移動である回転体の移動とは、根本的に異なっている。
すなわち、10kmで移動する際の出力は10kmに匹敵する出力であり、重心を押す移動方法の出力の限界であり、直線の作用反作用の限界を示す。
【0017】
速度を上げるには、出力速度を上げて、初めて力を受ける重心の移動速度は上がる。
回転体における重心移動は、円弧移動体の、重心を直接押すことなく、接線を押して移動する。
すなわち、回転体の移動を得る次元は、直線の作用反作用の移動を得る次元と異なり、直線の作用反作用の限界および限界まで、あるいは直角に移動力が入り、互いに相対している
【0018】
詳述すれば、重心移動する物体が有している回転力による回転は、重心移動とは関係なく回転する原理の現象事実である。
例えば、回転しているボールが移動しているのと関係なく、曲がることである。
その結果、回転力を円弧移動として、回転力を重心移動に変換することにより、即ち重心移動している回転運動する回転体の回転力を、基礎の次元となる重心移動として直線の作用反作用による移動、あるいは慣性移動する移動に解放することを意味しており、移動体の移動速度は移動方向により±に増加して累積する原理の発見に基づく発明である。
【0019】
したがって、重心移動しない回転体の回転力を重心移動に変換して解放した移動速度は、その時点の移動速度と関係なく、その時点の速度あるいは状態に累積する。
回転体の回転力を解放するために、円弧移動では、逆回転方向に、重心に直角又は接線に加力して、表れる合力の内の直角成分に対して加力方向とは、互いに直角の作用反作用である。
【0020】
以上より、温暖化防止だけでなく、宇宙移動のように求める速度が大きく、時間あたり大きな加速が必要な、重力脱出等の場合ほど、消費出力は小さく、物体移動に対する概念が変わる。
先願の実証例は既述した陸上走行と氷上走行の時間差が重力下の好例であり、宇宙の物体移動では、重心を押す物体移動と同一とする、直進しないで円弧移動している地上の回転体の移動のほうが特殊例である。
【0021】
また、重心を押す直線の作用反作用では、最大出力の第一撃のみが用いられて、以後の出力成分は、重心を押すために利用不可能となり、すべての従来の出力機関で廃棄しているが、重心を押さない回転体の出力では、元の速度に、次元の違う回転力が変換されて、直角に速度が入るために、残った出力ごとに加速が出力の大小に関係なく加えられて、出力がゼロ状態となるまで用いることができて、従来廃棄していた出力を利用できる。
【0022】
当然の帰結として、従来の物体移動に比して、回転体による移動が省力であり、危急を要する環境の悪化を躱すことができる。
まとめると、すべての物体の移動には、出力で重心を押して移動する、直線の作用反作用となる移動原理の他に、
物体には、重心を直角又は接線を押して、重心移動しない回転運動に変化した回転体には、、回転体の逆回転方向に直角又は接線に加力して、回転体の回転力で重心が円弧移動する移動原理がある。
本願は、出力により物体の重心を直角又は接線を押して、重心移動しない回転体を形成した、該回転体に、重心に直角又は接線に、逆転方向に加力して円弧移動を繰り返す移動方法を特徴とする移動方法および移動体の発明である。
【発明の効果】
【0023】
出力による回転体の移動は、回転方向と逆方向に、重心に直角又は接線に加力して、回転力で加力点を支点として回転体全体が公転して、回転力を失って物体となるまで円弧移動する原理を繰り返して移動する移動方法の発明である。
【0024】
円弧移動は逆回転方向の重心に直角又は接線への加力により重心が円弧移動して、地面等の対象を摩擦により横方向に加力(蹴る)するのではなく、グラインダーと同じく対象を直角に押さえて、摩擦と関係なく横移動して、安全な移動ができる。
【0025】
とりわけ、直線の出力で入力した回転力となった運動力が、ギャー等の伝導装置により直線の作用反作用により再び回転として対象に対して、摩擦による横方向の加力により移動する、とする無駄の多い、重心を押して移動を得るとする、従来の直線の作用反作用とする移動方法ではなく、回転運動力を、直接用いる利点は大きく、重心を押す移動方法の出力の浪費が原因の、小手先の改善では間に合わない、地球温暖化等の環境悪化の根本的な改善策であり、また、従来の摩擦による回転体の制動、加速と併用できる。
【図面の簡単な説明】
【0026】
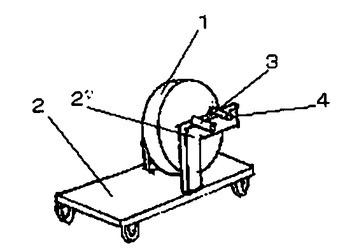
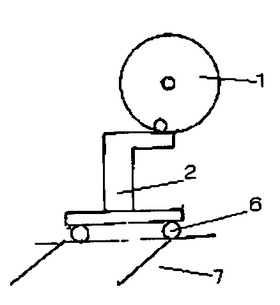
【図1】 円弧移動する回転体の斜面図。
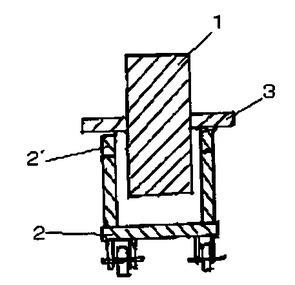
【図2】 回転体の構成を表す要部断面図。
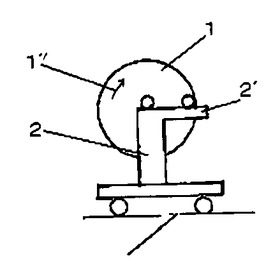
【図3】 回転体の加力点が支持棒に当たった状態の移動開始を表す移動原理の要部動作図。
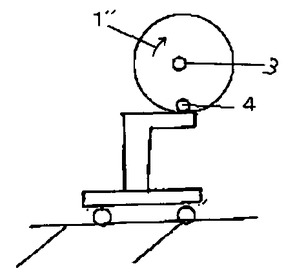
【図4】 加力点が支点となって回転軸が加力点の直上近辺に達した状態の移動原理動作図。
【図5】 回転体が直上を過ぎて、円弧を描いて前方に落下する移動原理動作図。
【図6】 回転体の回転軸、加力点、公転の仮想円の各接線は垂直で始まる移動原理概念図。
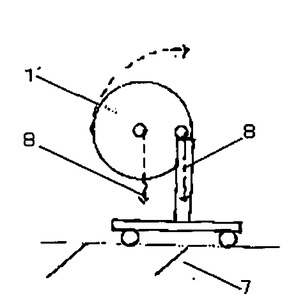
【図7】 各接線が水平になるまで、回転体の支点は支持体上部と摩擦が有っても後方に蹴られないことを示す移動原理概念図。
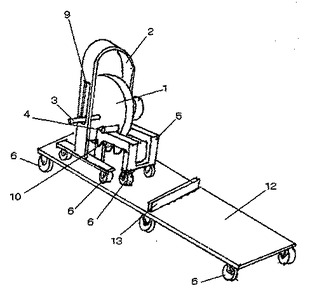
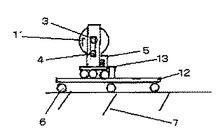
【図8】 円弧移動する実証を兼ねた台車を含む移動体の斜面図。
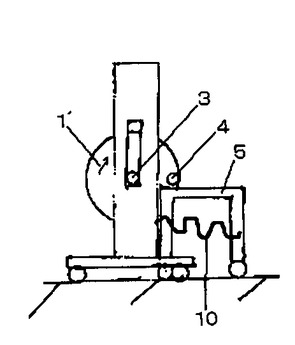
【図9】 加力点が回転体の回転で受け部上に当接した状態の動作の側面図。
【図10】 回転体が受け部上の加力点を支点に、直上に達する円弧移動動作図。
【図11】 受け部が伸縮材により元の位置関係に復帰する移動動作図。
【図12】 回転軸が公転で繰り返し移動する軌跡を表す移動概念図。
【図13】 支持体と受け部とからなる系を六輪の台車に搭載して、出力で回転体を回転して加力点が受け部に当接して回転体が上がっても、台車が後方に移動しない転がり状態の移動原理の実証を表す動作図。
【図14】 回転体の公転により、台車上を進み衝立に当たって、衝立毎移動する移動原理動作図。
【発明を実施するための形態】
【0027】
回転体の移動には、円弧移動原理があり、原理を用いた重心の移動方法および移動体の発明であり、回転体を含む物体の重心を押す移動方法の他に、物体の重心を直角又は接線を押して回転を得た、回転体独自の重心移動となる、重心の円弧移動による移動方法を移動原理から詳述する。
【実施例1】
【0028】
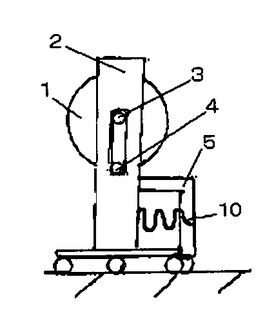
図1は 円弧移動する回転体の斜面図で、回転体1は支持体2の受け部位2´上に回転軸3と、回転軸3以外の外周に形成した突起となる加力点4が載っている。
図2は 図1の回転体の構成を表す要部断面図で、図3は出力で、回転方向を示す矢印1〃方向に回転する回転体1の加力点4が支持体の受け部位2´に当接した状態の、回転軸3の重心が円弧移動開始を表す要部動作図で、図4は 支持体上部2´上の加力点4が支点となって支点の接線が水平とならず、支点が後方に蹴ることなく、全体が回転して、回転体1が上昇する状態を表して、回転軸3が加力点4の直上に達して、加力点4の接線が水平となった状態の動作を表す動作図で、図5では 回転体1が直上で、接線が後方に蹴る効果を発揮する状態から、加力点4と受け部位2´の上部との間に摩擦があれば、支持体2は、下端の転がり輪6で後方に移動して、回転体1は支点を軸に円弧を描いて前方に落下する動作図を表している。
【0029】
その際の回転体1の軌跡は円弧であり、上横二方向の合力で回転(公転)して、直進しないで円弧移動する原理を表す。
図1のように、支持体2の大略水平な受け部位2´の上部に回転軸3を載せて、出力で回転体1を回転すると、受け部位2´の上部に当接して、下方に付勢された加力点4を支点に、回転力により回転体1全体が回転する。
【0030】
すなわち、回転体1は上方向と横方向の二成分の回転成分で全体が公転する。
回転体1の回転軸3への加力は受け部位2´上部による上方向であり、回転軸3が重心移動開始の大略水平位置から、直上に達するまで回転体の回転軸3および、加力点4である公転の支点、および公転の仮想円1´の接線方向7は水平とならず、棒高跳び等の回転要素と同じく、摩擦の有無に関係なく対象6を後方に蹴ることなく、仮想円1´等の接線は、直角から順次水平に近づき、支点である加力点4の直上に回転体1の回転軸3が達して、はじめて加力点4の接線方向8は水平となって、受け部位2´の上部と支点との間に摩擦があれば、互いに逆方向に移動するもので、その間公転の加力点4が後方に蹴る作用は生じない。
【0031】
棒高跳びの棒が直上に達するまで、公転の仮想円等の回転軸となる加力点の支点は、回転体の回転軸が回転軸となって、後方に蹴ることができない現象事実が、原理を証明している。
公転する回転体に、回転しない支持体等の付属するものに質量があれば、回転体の公転で発生する移動力は、その質量分の重心を、直線の作用反作用で引くこととなり、当然、公転軸である支点を含めた回転体全体が、回転していない付属する質量との間の、直線の引き合いとなって付属する質量方向に移動する。すなわち後退する。
この事実を、摩擦による直線の移動と混同することにより、直角の作用反作用の存在を理解せぬこととなる。
【0032】
この原理は回転体および回転要素による、直角の作用反作用の重心の円弧移動の根本原理を表し、すべての回転体あるいは回転要素による重心移動で成り立つ。
図1から図5までの各図は、回転体1の円弧移動原理で、無重力下、あるいは重力下の移動状態のありふれた原理事実である、回転体1の重心の円弧移動を表す実施例であり、図6、7は回転体1の回転軸3、支点となる加力点4、仮想円1´の公転の際の接線方向8を表し、公転の回転軸となる支点の加力点4が後方に蹴らないことを表す。
【0033】
すなわち、自然界は、爆発の出力が物体の重心を押して移動する、古来先哲の直線の作用反作用の動きで統一されているのではなく、重心を直角又は接線を押すことにより、出力の直線移動力が直線移動しない回転力に替わって、直線移動しない回転運動となる原理現象が厳存することを示しており、錯覚して回転体の移動も、古来直線の作用反作用と同一と混同した結果の誤りを正して温暖化等の危機に処する時機である。
本願の回転体の円弧移動の発明も、この回転体の移動(運動)原理で成り立つ。
【実施例2】
【0034】
図8ては、回転軸3以外の外周部に逆回転方向の支点となる突起の加力点4を設置した回転体1の回転軸3を、下端に転がり輪6を有する支持体2の両側の直立部位に穿設した長穴9内に上下動可能に挿入して、支持体2の内側を前後動可能に、下端に転がり輪6を有する加力点4の受け部5を別個に設けて、互いの位置を復帰すべく、伸縮材10で連結したことを特徴とする移動体の斜面図であり、六輪よりなる中央に衝立13を形成した台車12上に搭載して、後方に蹴らない円弧移動を実証する。
【0035】
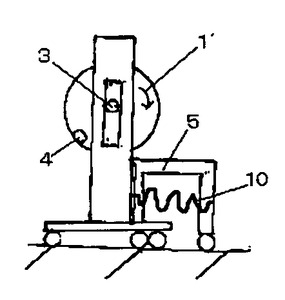
図9、10、11では、出力で回転体1を回転して、逆回転方向となる突起の、加力点4が回転体の回転で、加力点が受け部5上に当接した状態を表し、図10は 回転体1が加力点4を支点に公転して、支持体2を受け部5側に引き寄せつつ、直上に達する移動動作の側面図を表し、図11は、回転体1が直上を過ぎて、受け部5が伸縮材10により元の位置関係に復帰することを繰り返して移動することを特徴とする移動動作図を表し、
【0036】
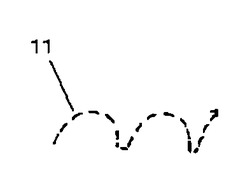
図12は、繰り返して公転する回転体1の回転軸3の円弧移動軌跡11が直進していない状態を表す移動動作の概念図を示し、回転体の移動が重心を押さずに円弧移動するため、重心(回転軸)の円弧移動は、直線の作用反作用による重心移動と異なり、円弧移動している重心移動に繰り返される重心の、その時点の円弧移動は、即ち移動速度は、加力点による公転ごとに、対象を後方に蹴らずに直角に、対象を下方向へ押す加力で移動するため、対象が動いている、あるいは停止している等の状態に関係なく、その時点(現時点)の状態に累積して、[課題を解決する手段]の項で詳述した。
【0037】
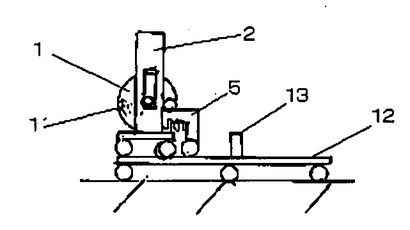
図13は全体の系の重心が前方に移動しない、六輪の台車12上に支持体と受け部よりなる全体の系を搭載して、回転体が回転する状態を表す側面図で、図14は回転体1が回転により前進して、衝立13に当たって台車12ごと移動する状態の、後方に蹴ることなく、回転体1の回転と受け部5の位置関係と台車毎移動する動作図である。
【0038】
図8の側面図では、回転体1の回転軸3を支持体2の直立部位に穿設した長穴14内に上下動可能に挿入して、支持体と加力点の支点を受ける受け部を伸縮材で連結しており、出力で回転体を矢印1〃方向に回転すると、支点は図9のように、受け部上に当接して全体が回転して図10となって、受け部上の加力点の支点は上方向の加力がなくなって、図11の受け部は伸縮材により前方に移動する。長穴の下死点の高さ位置と受け部の上部の高さをわずかに受け部の高さを低く、即ち水平以下に設置すれば、回転軸に後方に蹴る移動動作は発生しない。
【0039】
この動作を回転体の公転ごとに繰り返して、支持体は回転体の横移動成分で回転方向に移動して、回転軸の軌跡は図12の軌跡を繰り返して、直進せず円弧移動することを特徴とする移動方法の移動体の発明である。
回転体の逆回転方向の重心を直角又は接線を押す重心の円弧移動は、加力に対して、全体が回転する、すなわち、公転する重心の円弧移動のために、加力方向成分と、直角方向成分で回転は成り立ち、(出力による回転体の重心移動となる加力点の受け部の設置による上方向の加力と、ロケット等の出力による上方向の加力は等しい。)
出力による加力方向と直角方向成分は、互いに直角となる回転体の円弧移動は、直線の作用反作用とならず、作用と反作用が、互いに直角となる移動となる原理で、発生した加力方向成分と直角方向成分とによる円弧移動となる原理による発明である。
【0040】
回転体の円弧の公転移動の加力方向成分は、加力方向にバネ等の伸縮材を挿入して、回転力として復帰することにより、発生する出力のロスはない。
したがって、図13のように台車上に搭載して、回転体を回転して支持体と受け部よりなる系を移動しても、後方に台車を蹴ることなく移動して、図14のように衝立に当たって、後方に蹴ることなく台車ごと移動する事実より、スクリューのない船、転がり輪の自動車等、その応用範囲は広い。
すなわち、駆動装置を有しない被移動体に搭載して、後方に地面等の対象を蹴ることなく、対象を下方に直角に押す動作で、被移動体ごと移動して、直角の加力があればよい。
以上各図より、回転体の移動が、直進しておらず円弧移動であり、直角の作用反作用で成り立っていることの、重力下のために直上に加力した場合の実施態様であり、回転要素による棒高跳び等の移動方法も、回転体の移動方法であり、回転要素の仮想円の回転軸である公転の支点の回転軸、回転体の回転軸のいずれの接線方向も、水平、即ち加力方向に対して直角となって、はじめて後方に蹴る状態となる。
【0041】
本実施例では、円板状の回転体に加力点を設置して例示しているが、回転体は円板と限らず、円錐形、球体、球体の集合体等、あるいは回転の一部である棒高跳びの人体のように、あるいはステッキをつくように、二方向力で構成した回転要素に、逆回転方向の加力となる加力点を設置して加力すれば、元の回転要素は加力点を支点に円弧移動して、重心移動に変換する移動原理である。
【0042】
したがって、図9から図14までの各図の回転体の公転で発生する円弧移動動作は、直線の作用反作用とならず、直角の加力による横移動である、直角の作用反作用となるから、対象を後方に蹴らない重心移動となり、加力点による回転(公転)毎に前の移動状態に、関係なく公転の移動力が前の移動状態あるいは状態に累積することを表していて、次の実施例で詳述する。
【0043】
以上実施例1の移動原理より、実施例2のように、 出力で回転する回転体の逆回転方向の重心又は回転軸に直角又は接線に加力して、加力点を支点に発生する加力方向と、直角方向の二成分の合力の内の、無重力下では合力方向に、重力下では直角方向成分で繰り返し円弧移動することを特徴とする移動方法および移動体である。、
【実施例3】
【0044】
出力で物体を回転して、加力点が回転体の回転で受け部上に当接した状態から、回転体の回転軸が加力点を支点に回転して、支持体を受け部側に引き寄せつつ、直上に達して移動するとともに伸縮材は縮んで、回転体が直上を過ぎて、受け部が伸縮材により元の位置関係に復帰する円弧移動動作を繰り返して回転体および回転体の属する系全体が移動するもので、出力で回転する回転体が回転軸以外の外周に、回転体全体が回転する加力点を設置して、逆回転方向の重心又は回転軸に直角又は接線に加力して、加力点を支点に全体が公転して、発生した加力方向成分と、直角方向成分の二成分で円弧移動を繰り返して、直角方向成分で直角方向に移動することを特徴とする物体の回転による移動方法および移動体である。
【0045】
出力により回転体1を回転すると、回転軸3と大略水平な受け部5上に加力点4は当接して、回転体全体が加力点4を支点として、下方向に付勢されて二方向の合力で公転する。 回転軸3が加力点4の直上に達するまで、加力点4の接線は水平とならず、回転軸3は受け部5を後方に蹴ることは、加力点4と受け部5上間に摩擦があっても、蹴ることはできない。
また、加力点4を受け部5に接する加力点5を、ベアリング等で回動可能に形成すれば、互いの摩擦は発生せず、公転の移動成分のみとなる。
【0046】
二方向の発生した合力の縦方向成分で、回転軸3は長穴14内を上昇するとともに、横方向成分で回転方向に長穴14を押す。
結果、支持体2は受け部5方向に移動して、伸縮材10は縮む。
支持体2の移動で縮んだ伸縮材10は、回転軸3が長穴14の下死点に達して、元の位置関係に復帰する。
【0047】
この動作を、加力点4が一点であれば、一周毎に繰り返して、複数点であれば、一周に複数回繰り返して移動することを特徴とする移動方法である。
重力下のために地面等対象上を作用反作用が直角となる円弧移動で、直角成分で横移動するが、無重力下の宇宙では、発生する合力成分方向に、受け部5に替わるロケット噴射等による加力により、階段状に円弧移動する。
【0048】
回転軸3が加力点4の直上に達して、加力成分はなくなり、加力点4の接線は水平となって、受け部5上との間に摩擦があれば、はじめて受け部5を後方に蹴り、回転軸3は前方に進むとするが、長穴14の下死点と受け部5の高さの差、あるいは実際は互いに相殺されて移動は生じないが、摩擦により発生する互いに逆方向の移動は、支持体2と受け部5との質量の差の、直線の作用反作用による引き合いで、回転体1による移動とは根本的に異なる。
【0049】
本発明の移動方法では、立ておきで例示している回転体を、横置きにすることにより、移動を得られ、円弧移動では、互いに回転体を逆転して対称に対抗して、あるいは積層して反作用を相殺して直進できる。
対の回転体による移動は、対象を必要としない自己移動であり、環境を傷つけない。
【0050】
回転体が、回転体の有する回転力を、逆回転方向の重心に直角又は接線に加力して、加力点を支点に公転して、発生した二方向の合力で円弧移動して、円弧移動による重心移動で発生する速度を、回転体の現時点の移動状態に加えることにより、公転ごとに繰り返して速度が累積して移動することを特徴とする回転による移動方法および移動体である。
【0051】
したがって、回転体の円弧移動で発生する移動動作は、直線の作用反作用とならず、円弧で発生する移動力による移動であるから、対象を後方に蹴らない重心移動となり、移動する加力点毎に前の移動状態に、関係なく移動力が前の移動状態に累積する。
【0052】
回転体の円弧移動では、重力下では直上方向の加力となって、地面等の対象を下方に押すだけで、対象との関係が後方に蹴る摩擦がないために、回転による出力による回転力は、その現時点の移動と関係なく重心移動に変換して、第一撃後の、直線の作用反作用ては廃棄される出力を回転力として利用できるとともに、発生した重心を押さない回転力による重心移動は、重心は移動しており、その時点の停止又は移動状態に関係なく累積する。
【0053】
そのため、実施例では対象が滑る等とのトラブルは駆動力を発生する回転体では発生せず、重力下であるため、対象が滑る等の影響を受けずに対象上を転がり輪で転がり、重力による横方向の摩擦の影響を受けず、無重力下でも、摩擦を必要としないため、移動が可能となる移動方法および移動体である。
【0054】
以上回転体の移動は、重心を押して直線移動する従来の移動方法の他に、回転体の移動には、円弧移動の回転体独自の移動原理による発明である。
上記事実現象を、ロケット等の重心を押して移動する現象と同一視したために、出力の浪費を招く、旧来古来の重心を押す、直線の作用反作用の動きに慣れ、地球温暖化等を来している。
これを要するに、 物体が、重心に直角又は接線に出力を受けて移動しない回転体となった回転体の有する回転力を、逆回転方向の直角又は接線に加力して、加力点を支点に公転して、発生した二方向の合力で円弧移動して、回転体が円弧移動による重心移動を繰り返すことにより、回転体および回転体の属する系が移動することを特徴とする物体の回転による移動方法および移動体である。
【産業上の利用可能性】
【0055】
本願は、先願(2005−112718)同様に未確認飛行物体の移動原理の解明途上で発見した物体(回転体)の運動および移動原理に基づく、地上でもありふれた宇宙自然が語る、現象原理に基づいた発明である。
吾人は直線の作用反作用に慣れて、回転体の有する移動(運動)原理を、先願の時点では理解されない、現象としてのみの捕らえ方しかできなかったが、本願では、その原理が有り得ない現象ではなく、爆発等の出力による物体移動の内の回転体となる原理および回転体の有する移動しない回転力を、逆回転方向の回転軸(重心)に直角又は接線に加力することにより、円弧移動力を解放して重心移動する原理を解明して、先願が正鵠を得ていることを実証し、解明発展した原理による発明であることは、作用と反作用が直角で成り立っていることを証明詳述した。
回転体の重心に直角又は接線に加力して移動する移動原理による、重心を直接おさないために、移動速度が累積する回転体による移動方法の発見による発明は、物体の移動をもって発展する人類にかかる危機に対処して資する。
【0056】
重力下で回転体から力を得る方法として、古来吾人は回転体の有する、二方向の合力を用いて出力を得る方法ではなく、回転体の回転軸を固定して、回転体の有する二方向の合力移動成分の内の回転方向成分のみを、用いて移動力としたために、重力下で重心を押す直線の作用反作用の出力と等しく見えて同一と混同して用いてきた結果が現状である。
物体(回転体)の移動原理を、重力下の地上での重心を押す、物体の動きをもって理解しようとすれば、直角の作用反作用が存在するとする、先願同様に理解されない現象であるが、宇宙誕生より直線の出力が、直線移動していない物質の回転運動が主体をなしている、無重力下の宇宙からみれば、先願同様重力下の対象に依存して移動する、あるいは重心を押す移動と、接線を押す移動〔運動〕を同一視する、物体(回転体)の動きのほうが特殊であることが、容易に理解できる。
【0057】
直角の作用反作用の存在が否定されている先願は、重心に直角又は接線への出力の加力による回転体の回転力を、直線移動しない円弧移動による重心移動により失って、回転しない物体となる現象原理による発明であり、回転体への加力(接線)方向に対して、直角の出力を得る円弧移動である。
【0058】
本願発明の骨子は、回転体の移動が従来のものの重心を押す、直線の作用反作用によらず、回転体が円弧移動する原理による移動方法および移動体の発明である。
【0059】
したがって、重心に直角又は接線に、出力で直線の作用反作用で入力した、回転体となる物体の重心移動しない回転力が、入力と逆方向に円弧として表れた重心移動力の現象事実であり、その間に回転を地面等の対象に伝達して摩擦により、再度回転として後方に蹴る移動方法等と、根本的に異なり、回転を介在することにより出力のロスがない、重力下、無重力下に関係なく移動する、出力の浪費が原因とする地球温暖化等の環境悪化を防止する、移動方法を特徴とする移動方法および移動体の発明である。
【符号の説明】
【0060】
1 回転体。
1´ 仮想円。
1〃 回転方向の矢印。
2 支持体。
2´ 受け部位。
3 回転軸。
4 加力点。
5 受け部。
6 転がり輪。
7 対象。
8 接線方向の点線。
9 穴。
10 伸縮材。
11 移動軌跡。
12 台車。
13 衝立。
14 長穴。
【受託番号】
【0061】
【配列表フリーテキスト】
【0062】
【配列表】
【0063】
【技術分野】
【0001】
出力で回転する、物体の回転による円弧移動する方法および円弧移動円弧移動体に関する。
【背景技術】
【0002】
出力で回転する物体の、回転体の移動は、その重心を押す直線の作用反作用による移動方法とされている。
【先行技術文献】
【特許文献1】 特願2005−112718
【非特許文献1】 最高裁上告文ー平成20年(行ノ)第139号
【非特許文献2】 最高裁上告文ー平成20年(行ヒ)第151号
【発明の概要】
【0003】
本願発明は、回転体を含むすべての物体がその重心を押されて、加力方向と同じ方向に移動する移動方法の他に、
物体の重心を直角又は接線を押して回転する回転体が、重心を押さずに、移動体となる移動方法の事実が、見慣れた移動方法で移動していることの発見を利用した物体の回転による円弧移動方法および円弧移動体の発明である。
【発明が解決しようとする課題】
【0004】
車両の車輪である回転体による移動は、地面等の対象上を、対象を摩擦により後方に、横方向に蹴って逆方向に移動して、制動時には逆方向に加力して移動する。とする。
そのために、対象が濡れている等で、摩擦がきかない場合は、進行あるいは制動がきかず危険である。
【0005】
すなわち、回転体による移動は、重心を押して移動する移動と同一の移動方法として、扱われて、古来対象を蹴る移動方法は、重心を押す直線の作用反作用による移動を意味して、その結果が地球温暖化の原因となる、主として人間の移動のための出力の浪費による。 その他回転体の回転による移動を、重力下にあるため回転していない物体の重心を押して移動する移動方法と同一の移動方法と混同したために、回転体本来の移動がなされていない、古来の、重心を押す物体移動と混同したことによる、出力エネルギーの浪費を招いた結果が、温暖化等の危機を来している。。
【課題を解決するための手段】
【0006】
出力を重心に受けた回転体を含むすべての物体は、加えられた力(以下加力と称す)と同じ方向に移動する。
また、物体の接線に、即ち重心と直角又は接線に加力された物体は、回転体となる。
即ち、物体は重心に直角又は接線に入力して回転体となる。
物体が入力により回転する回転体となり、回転体は回転運動はするが、その重心は移動しないで、その場で回転運動をするのみであり重心移動しない。
本願は、出力で回転運動はするが移動しないで回転する、回転しない物体が変化した回転体が、重心移動する原理を用いた発明である。
回転体を含むすべての物体の移動は、その重心を押して直線の作用反作用となる移動方法がある。
【0007】
その他に回転する物体となった移動しない回転体の移動には、逆回転方向に重心を直角又は接線を押して、加力点を支点として、回転体全体が回転(公転)して、発生した加力方向と、回転方向に直角の二方向の合力の移動成分による円弧移動原理がある。
回転体の一部分を破壊あるいは分離して、遠心力で離脱して直線移動する移動原理とがあり、重心を押す回転体を含むすべての物体の移動原理に加えて、回転体独自の二つの移動原理である。
【0008】
本願は、重心を直角又は接線を押して回転力を失って回転しない物体となる円弧移動原理を用いて課題を解決する。
物体の回転は物体の重心を押さずに、重心を直角又は接線を押して回転は得られて、回転はするが重心の移動は得られない事実であり、回転の運動原理である事実である。
回転体が移動するには、例えば摩擦により回転方向と逆方向に地面を蹴る、回転軸となる車輪の重心(中心)に直角又は車輪の接線に加力して、回転体は、加力点を支点に全体が回転して、移動軌跡は直進せず円弧移動であり、対象に依拠するすべての回転体あるいは回転要素による移動は、直進できず円弧移動であって、直進できない原理である。
直進しているようにみえるのは、回転の公転円が微細であるためである。
このことは、回転を得た回転運動する物体が、重心に直角又は接線に、回転方向と逆方向に力を加えて、加力点を支点に重心が円弧移動により回転力を失って回転しない物体(車輪)となる現象事実であり、回転する物体の回転体の回転力がなくなって、回転しない物体(車輪)となって停止する原理である。
【0009】
地面を後方に蹴って移動することは、重心を押して移動しているのではなく、回転している回転体が、地面との接点である接線に、逆方向の加力(摩擦による横方向の加力)による、加力点を支点とした全体の回転(公転)であり、直進していない現象事実である。
すなわち回転体は摩擦による横方向の加力により、加力点を支点に横下方向の円弧移動となり、その二方向の回転の合力の内の、横方向成分で移動して、下方向成分は対象(地面)で相殺されて横移動している。
【0010】
また、回転に用いる出力は人力、電力あるいは内燃機関等、その種類を問わない。
【0011】
本願は、前者の回転体の円弧移動の、原理説明実例として円弧移動は、グラインダーの発生する火花方向と逆方向に加力することにより、留め金をはずしたグラインダーは上横方向に飛んで、重力で落下する。
対象(地面)上を移動する車輪への加力方向は、摩擦により横方向となり、グラインダーの場合は、加力方向が90度ずれた直上方向となる。
したがって車輪の場合は、回転する車輪に横方向の加力により、横方向と下方向の成分で車輪は移動して、下方向成分は地面で相殺され、グラインダーの場合は、上方向の加力により、上方向と横方向の成分でグラインダーは横移動して、上方向成分は重力で落下して相殺する。
【0012】
したがって、加力方向と発生した横(直角)移動成分は、互いに作用反作用が直線とならず、直角の作用反作用となる。
前記円弧移動する原理による回転力による移動方法の発明である。
【0013】
すなわち、直線の作用反作用による従来古来の移動方法は、物体の重心を押して移動するために、出力の内の移動方向の出力成分のみを用いて移動力を得て、他の出力成分は廃棄して成り立つ。
ロケット等を例とすれば、進行方向の出力のみを用いて、他は勇ましく廃棄しており、他の内燃機関等も同種である。
本願回転体による移動は、360度方向からの出力で物体の重心に直角又は接線に入力で得られる回転力を、直角の作用反作用となる円弧移動であり、力として取り出して、ロスはない。
【0014】
すなわち物体の中心(重心)に直角又は接線に、出力で加えられた力を、円弧移動として移動力として取り出して用いる発明である。
上記原理による移動方法は、重心を押して移動する古来の移動方法の結果が来した出力の浪費が主因をなすとする、地球温暖化を、出力による物体の重心に直角又は接線への加力により回転体への入力方向の逆方向が出力であり、入力に対して出力の損失は起こらない移動方法の発明で課題を解決する。
例えれば、重心を押して10kmで慣性移動する物体を、20kmに加速するには、20kmの出力で加速しなければならない、出力と移動は等価である従来の重心を押して移動する、常識の当然の現象事実である。
【0015】
しかし、回転体の移動では、10kmで慣性移動する物体を20kmに加速するには、重心は10kmで移動しているから、後方に蹴って(加力して)重心を押すのではなく、重心を直角又は接線を押す移動であり、20kmの移動に対して10kmの慣性移動であり、同じ重心移動でありながら、10kmの加速でよいことになる。
【0016】
この現象事実は、重心を直角又は接線を押して移動する円弧移動の、回転体による移動の根本原理による発明である。
多段ロケットによる移動は、段数を増しても質量(重量)に対して爆発の出力が上限であり、重心を押さない移動である回転体の移動とは、根本的に異なっている。
すなわち、10kmで移動する際の出力は10kmに匹敵する出力であり、重心を押す移動方法の出力の限界であり、直線の作用反作用の限界を示す。
【0017】
速度を上げるには、出力速度を上げて、初めて力を受ける重心の移動速度は上がる。
回転体における重心移動は、円弧移動体の、重心を直接押すことなく、接線を押して移動する。
すなわち、回転体の移動を得る次元は、直線の作用反作用の移動を得る次元と異なり、直線の作用反作用の限界および限界まで、あるいは直角に移動力が入り、互いに相対している
【0018】
詳述すれば、重心移動する物体が有している回転力による回転は、重心移動とは関係なく回転する原理の現象事実である。
例えば、回転しているボールが移動しているのと関係なく、曲がることである。
その結果、回転力を円弧移動として、回転力を重心移動に変換することにより、即ち重心移動している回転運動する回転体の回転力を、基礎の次元となる重心移動として直線の作用反作用による移動、あるいは慣性移動する移動に解放することを意味しており、移動体の移動速度は移動方向により±に増加して累積する原理の発見に基づく発明である。
【0019】
したがって、重心移動しない回転体の回転力を重心移動に変換して解放した移動速度は、その時点の移動速度と関係なく、その時点の速度あるいは状態に累積する。
回転体の回転力を解放するために、円弧移動では、逆回転方向に、重心に直角又は接線に加力して、表れる合力の内の直角成分に対して加力方向とは、互いに直角の作用反作用である。
【0020】
以上より、温暖化防止だけでなく、宇宙移動のように求める速度が大きく、時間あたり大きな加速が必要な、重力脱出等の場合ほど、消費出力は小さく、物体移動に対する概念が変わる。
先願の実証例は既述した陸上走行と氷上走行の時間差が重力下の好例であり、宇宙の物体移動では、重心を押す物体移動と同一とする、直進しないで円弧移動している地上の回転体の移動のほうが特殊例である。
【0021】
また、重心を押す直線の作用反作用では、最大出力の第一撃のみが用いられて、以後の出力成分は、重心を押すために利用不可能となり、すべての従来の出力機関で廃棄しているが、重心を押さない回転体の出力では、元の速度に、次元の違う回転力が変換されて、直角に速度が入るために、残った出力ごとに加速が出力の大小に関係なく加えられて、出力がゼロ状態となるまで用いることができて、従来廃棄していた出力を利用できる。
【0022】
当然の帰結として、従来の物体移動に比して、回転体による移動が省力であり、危急を要する環境の悪化を躱すことができる。
まとめると、すべての物体の移動には、出力で重心を押して移動する、直線の作用反作用となる移動原理の他に、
物体には、重心を直角又は接線を押して、重心移動しない回転運動に変化した回転体には、、回転体の逆回転方向に直角又は接線に加力して、回転体の回転力で重心が円弧移動する移動原理がある。
本願は、出力により物体の重心を直角又は接線を押して、重心移動しない回転体を形成した、該回転体に、重心に直角又は接線に、逆転方向に加力して円弧移動を繰り返す移動方法を特徴とする移動方法および移動体の発明である。
【発明の効果】
【0023】
出力による回転体の移動は、回転方向と逆方向に、重心に直角又は接線に加力して、回転力で加力点を支点として回転体全体が公転して、回転力を失って物体となるまで円弧移動する原理を繰り返して移動する移動方法の発明である。
【0024】
円弧移動は逆回転方向の重心に直角又は接線への加力により重心が円弧移動して、地面等の対象を摩擦により横方向に加力(蹴る)するのではなく、グラインダーと同じく対象を直角に押さえて、摩擦と関係なく横移動して、安全な移動ができる。
【0025】
とりわけ、直線の出力で入力した回転力となった運動力が、ギャー等の伝導装置により直線の作用反作用により再び回転として対象に対して、摩擦による横方向の加力により移動する、とする無駄の多い、重心を押して移動を得るとする、従来の直線の作用反作用とする移動方法ではなく、回転運動力を、直接用いる利点は大きく、重心を押す移動方法の出力の浪費が原因の、小手先の改善では間に合わない、地球温暖化等の環境悪化の根本的な改善策であり、また、従来の摩擦による回転体の制動、加速と併用できる。
【図面の簡単な説明】
【0026】
【図1】 円弧移動する回転体の斜面図。
【図2】 回転体の構成を表す要部断面図。
【図3】 回転体の加力点が支持棒に当たった状態の移動開始を表す移動原理の要部動作図。
【図4】 加力点が支点となって回転軸が加力点の直上近辺に達した状態の移動原理動作図。
【図5】 回転体が直上を過ぎて、円弧を描いて前方に落下する移動原理動作図。
【図6】 回転体の回転軸、加力点、公転の仮想円の各接線は垂直で始まる移動原理概念図。
【図7】 各接線が水平になるまで、回転体の支点は支持体上部と摩擦が有っても後方に蹴られないことを示す移動原理概念図。
【図8】 円弧移動する実証を兼ねた台車を含む移動体の斜面図。
【図9】 加力点が回転体の回転で受け部上に当接した状態の動作の側面図。
【図10】 回転体が受け部上の加力点を支点に、直上に達する円弧移動動作図。
【図11】 受け部が伸縮材により元の位置関係に復帰する移動動作図。
【図12】 回転軸が公転で繰り返し移動する軌跡を表す移動概念図。
【図13】 支持体と受け部とからなる系を六輪の台車に搭載して、出力で回転体を回転して加力点が受け部に当接して回転体が上がっても、台車が後方に移動しない転がり状態の移動原理の実証を表す動作図。
【図14】 回転体の公転により、台車上を進み衝立に当たって、衝立毎移動する移動原理動作図。
【発明を実施するための形態】
【0027】
回転体の移動には、円弧移動原理があり、原理を用いた重心の移動方法および移動体の発明であり、回転体を含む物体の重心を押す移動方法の他に、物体の重心を直角又は接線を押して回転を得た、回転体独自の重心移動となる、重心の円弧移動による移動方法を移動原理から詳述する。
【実施例1】
【0028】
図1は 円弧移動する回転体の斜面図で、回転体1は支持体2の受け部位2´上に回転軸3と、回転軸3以外の外周に形成した突起となる加力点4が載っている。
図2は 図1の回転体の構成を表す要部断面図で、図3は出力で、回転方向を示す矢印1〃方向に回転する回転体1の加力点4が支持体の受け部位2´に当接した状態の、回転軸3の重心が円弧移動開始を表す要部動作図で、図4は 支持体上部2´上の加力点4が支点となって支点の接線が水平とならず、支点が後方に蹴ることなく、全体が回転して、回転体1が上昇する状態を表して、回転軸3が加力点4の直上に達して、加力点4の接線が水平となった状態の動作を表す動作図で、図5では 回転体1が直上で、接線が後方に蹴る効果を発揮する状態から、加力点4と受け部位2´の上部との間に摩擦があれば、支持体2は、下端の転がり輪6で後方に移動して、回転体1は支点を軸に円弧を描いて前方に落下する動作図を表している。
【0029】
その際の回転体1の軌跡は円弧であり、上横二方向の合力で回転(公転)して、直進しないで円弧移動する原理を表す。
図1のように、支持体2の大略水平な受け部位2´の上部に回転軸3を載せて、出力で回転体1を回転すると、受け部位2´の上部に当接して、下方に付勢された加力点4を支点に、回転力により回転体1全体が回転する。
【0030】
すなわち、回転体1は上方向と横方向の二成分の回転成分で全体が公転する。
回転体1の回転軸3への加力は受け部位2´上部による上方向であり、回転軸3が重心移動開始の大略水平位置から、直上に達するまで回転体の回転軸3および、加力点4である公転の支点、および公転の仮想円1´の接線方向7は水平とならず、棒高跳び等の回転要素と同じく、摩擦の有無に関係なく対象6を後方に蹴ることなく、仮想円1´等の接線は、直角から順次水平に近づき、支点である加力点4の直上に回転体1の回転軸3が達して、はじめて加力点4の接線方向8は水平となって、受け部位2´の上部と支点との間に摩擦があれば、互いに逆方向に移動するもので、その間公転の加力点4が後方に蹴る作用は生じない。
【0031】
棒高跳びの棒が直上に達するまで、公転の仮想円等の回転軸となる加力点の支点は、回転体の回転軸が回転軸となって、後方に蹴ることができない現象事実が、原理を証明している。
公転する回転体に、回転しない支持体等の付属するものに質量があれば、回転体の公転で発生する移動力は、その質量分の重心を、直線の作用反作用で引くこととなり、当然、公転軸である支点を含めた回転体全体が、回転していない付属する質量との間の、直線の引き合いとなって付属する質量方向に移動する。すなわち後退する。
この事実を、摩擦による直線の移動と混同することにより、直角の作用反作用の存在を理解せぬこととなる。
【0032】
この原理は回転体および回転要素による、直角の作用反作用の重心の円弧移動の根本原理を表し、すべての回転体あるいは回転要素による重心移動で成り立つ。
図1から図5までの各図は、回転体1の円弧移動原理で、無重力下、あるいは重力下の移動状態のありふれた原理事実である、回転体1の重心の円弧移動を表す実施例であり、図6、7は回転体1の回転軸3、支点となる加力点4、仮想円1´の公転の際の接線方向8を表し、公転の回転軸となる支点の加力点4が後方に蹴らないことを表す。
【0033】
すなわち、自然界は、爆発の出力が物体の重心を押して移動する、古来先哲の直線の作用反作用の動きで統一されているのではなく、重心を直角又は接線を押すことにより、出力の直線移動力が直線移動しない回転力に替わって、直線移動しない回転運動となる原理現象が厳存することを示しており、錯覚して回転体の移動も、古来直線の作用反作用と同一と混同した結果の誤りを正して温暖化等の危機に処する時機である。
本願の回転体の円弧移動の発明も、この回転体の移動(運動)原理で成り立つ。
【実施例2】
【0034】
図8ては、回転軸3以外の外周部に逆回転方向の支点となる突起の加力点4を設置した回転体1の回転軸3を、下端に転がり輪6を有する支持体2の両側の直立部位に穿設した長穴9内に上下動可能に挿入して、支持体2の内側を前後動可能に、下端に転がり輪6を有する加力点4の受け部5を別個に設けて、互いの位置を復帰すべく、伸縮材10で連結したことを特徴とする移動体の斜面図であり、六輪よりなる中央に衝立13を形成した台車12上に搭載して、後方に蹴らない円弧移動を実証する。
【0035】
図9、10、11では、出力で回転体1を回転して、逆回転方向となる突起の、加力点4が回転体の回転で、加力点が受け部5上に当接した状態を表し、図10は 回転体1が加力点4を支点に公転して、支持体2を受け部5側に引き寄せつつ、直上に達する移動動作の側面図を表し、図11は、回転体1が直上を過ぎて、受け部5が伸縮材10により元の位置関係に復帰することを繰り返して移動することを特徴とする移動動作図を表し、
【0036】
図12は、繰り返して公転する回転体1の回転軸3の円弧移動軌跡11が直進していない状態を表す移動動作の概念図を示し、回転体の移動が重心を押さずに円弧移動するため、重心(回転軸)の円弧移動は、直線の作用反作用による重心移動と異なり、円弧移動している重心移動に繰り返される重心の、その時点の円弧移動は、即ち移動速度は、加力点による公転ごとに、対象を後方に蹴らずに直角に、対象を下方向へ押す加力で移動するため、対象が動いている、あるいは停止している等の状態に関係なく、その時点(現時点)の状態に累積して、[課題を解決する手段]の項で詳述した。
【0037】
図13は全体の系の重心が前方に移動しない、六輪の台車12上に支持体と受け部よりなる全体の系を搭載して、回転体が回転する状態を表す側面図で、図14は回転体1が回転により前進して、衝立13に当たって台車12ごと移動する状態の、後方に蹴ることなく、回転体1の回転と受け部5の位置関係と台車毎移動する動作図である。
【0038】
図8の側面図では、回転体1の回転軸3を支持体2の直立部位に穿設した長穴14内に上下動可能に挿入して、支持体と加力点の支点を受ける受け部を伸縮材で連結しており、出力で回転体を矢印1〃方向に回転すると、支点は図9のように、受け部上に当接して全体が回転して図10となって、受け部上の加力点の支点は上方向の加力がなくなって、図11の受け部は伸縮材により前方に移動する。長穴の下死点の高さ位置と受け部の上部の高さをわずかに受け部の高さを低く、即ち水平以下に設置すれば、回転軸に後方に蹴る移動動作は発生しない。
【0039】
この動作を回転体の公転ごとに繰り返して、支持体は回転体の横移動成分で回転方向に移動して、回転軸の軌跡は図12の軌跡を繰り返して、直進せず円弧移動することを特徴とする移動方法の移動体の発明である。
回転体の逆回転方向の重心を直角又は接線を押す重心の円弧移動は、加力に対して、全体が回転する、すなわち、公転する重心の円弧移動のために、加力方向成分と、直角方向成分で回転は成り立ち、(出力による回転体の重心移動となる加力点の受け部の設置による上方向の加力と、ロケット等の出力による上方向の加力は等しい。)
出力による加力方向と直角方向成分は、互いに直角となる回転体の円弧移動は、直線の作用反作用とならず、作用と反作用が、互いに直角となる移動となる原理で、発生した加力方向成分と直角方向成分とによる円弧移動となる原理による発明である。
【0040】
回転体の円弧の公転移動の加力方向成分は、加力方向にバネ等の伸縮材を挿入して、回転力として復帰することにより、発生する出力のロスはない。
したがって、図13のように台車上に搭載して、回転体を回転して支持体と受け部よりなる系を移動しても、後方に台車を蹴ることなく移動して、図14のように衝立に当たって、後方に蹴ることなく台車ごと移動する事実より、スクリューのない船、転がり輪の自動車等、その応用範囲は広い。
すなわち、駆動装置を有しない被移動体に搭載して、後方に地面等の対象を蹴ることなく、対象を下方に直角に押す動作で、被移動体ごと移動して、直角の加力があればよい。
以上各図より、回転体の移動が、直進しておらず円弧移動であり、直角の作用反作用で成り立っていることの、重力下のために直上に加力した場合の実施態様であり、回転要素による棒高跳び等の移動方法も、回転体の移動方法であり、回転要素の仮想円の回転軸である公転の支点の回転軸、回転体の回転軸のいずれの接線方向も、水平、即ち加力方向に対して直角となって、はじめて後方に蹴る状態となる。
【0041】
本実施例では、円板状の回転体に加力点を設置して例示しているが、回転体は円板と限らず、円錐形、球体、球体の集合体等、あるいは回転の一部である棒高跳びの人体のように、あるいはステッキをつくように、二方向力で構成した回転要素に、逆回転方向の加力となる加力点を設置して加力すれば、元の回転要素は加力点を支点に円弧移動して、重心移動に変換する移動原理である。
【0042】
したがって、図9から図14までの各図の回転体の公転で発生する円弧移動動作は、直線の作用反作用とならず、直角の加力による横移動である、直角の作用反作用となるから、対象を後方に蹴らない重心移動となり、加力点による回転(公転)毎に前の移動状態に、関係なく公転の移動力が前の移動状態あるいは状態に累積することを表していて、次の実施例で詳述する。
【0043】
以上実施例1の移動原理より、実施例2のように、 出力で回転する回転体の逆回転方向の重心又は回転軸に直角又は接線に加力して、加力点を支点に発生する加力方向と、直角方向の二成分の合力の内の、無重力下では合力方向に、重力下では直角方向成分で繰り返し円弧移動することを特徴とする移動方法および移動体である。、
【実施例3】
【0044】
出力で物体を回転して、加力点が回転体の回転で受け部上に当接した状態から、回転体の回転軸が加力点を支点に回転して、支持体を受け部側に引き寄せつつ、直上に達して移動するとともに伸縮材は縮んで、回転体が直上を過ぎて、受け部が伸縮材により元の位置関係に復帰する円弧移動動作を繰り返して回転体および回転体の属する系全体が移動するもので、出力で回転する回転体が回転軸以外の外周に、回転体全体が回転する加力点を設置して、逆回転方向の重心又は回転軸に直角又は接線に加力して、加力点を支点に全体が公転して、発生した加力方向成分と、直角方向成分の二成分で円弧移動を繰り返して、直角方向成分で直角方向に移動することを特徴とする物体の回転による移動方法および移動体である。
【0045】
出力により回転体1を回転すると、回転軸3と大略水平な受け部5上に加力点4は当接して、回転体全体が加力点4を支点として、下方向に付勢されて二方向の合力で公転する。 回転軸3が加力点4の直上に達するまで、加力点4の接線は水平とならず、回転軸3は受け部5を後方に蹴ることは、加力点4と受け部5上間に摩擦があっても、蹴ることはできない。
また、加力点4を受け部5に接する加力点5を、ベアリング等で回動可能に形成すれば、互いの摩擦は発生せず、公転の移動成分のみとなる。
【0046】
二方向の発生した合力の縦方向成分で、回転軸3は長穴14内を上昇するとともに、横方向成分で回転方向に長穴14を押す。
結果、支持体2は受け部5方向に移動して、伸縮材10は縮む。
支持体2の移動で縮んだ伸縮材10は、回転軸3が長穴14の下死点に達して、元の位置関係に復帰する。
【0047】
この動作を、加力点4が一点であれば、一周毎に繰り返して、複数点であれば、一周に複数回繰り返して移動することを特徴とする移動方法である。
重力下のために地面等対象上を作用反作用が直角となる円弧移動で、直角成分で横移動するが、無重力下の宇宙では、発生する合力成分方向に、受け部5に替わるロケット噴射等による加力により、階段状に円弧移動する。
【0048】
回転軸3が加力点4の直上に達して、加力成分はなくなり、加力点4の接線は水平となって、受け部5上との間に摩擦があれば、はじめて受け部5を後方に蹴り、回転軸3は前方に進むとするが、長穴14の下死点と受け部5の高さの差、あるいは実際は互いに相殺されて移動は生じないが、摩擦により発生する互いに逆方向の移動は、支持体2と受け部5との質量の差の、直線の作用反作用による引き合いで、回転体1による移動とは根本的に異なる。
【0049】
本発明の移動方法では、立ておきで例示している回転体を、横置きにすることにより、移動を得られ、円弧移動では、互いに回転体を逆転して対称に対抗して、あるいは積層して反作用を相殺して直進できる。
対の回転体による移動は、対象を必要としない自己移動であり、環境を傷つけない。
【0050】
回転体が、回転体の有する回転力を、逆回転方向の重心に直角又は接線に加力して、加力点を支点に公転して、発生した二方向の合力で円弧移動して、円弧移動による重心移動で発生する速度を、回転体の現時点の移動状態に加えることにより、公転ごとに繰り返して速度が累積して移動することを特徴とする回転による移動方法および移動体である。
【0051】
したがって、回転体の円弧移動で発生する移動動作は、直線の作用反作用とならず、円弧で発生する移動力による移動であるから、対象を後方に蹴らない重心移動となり、移動する加力点毎に前の移動状態に、関係なく移動力が前の移動状態に累積する。
【0052】
回転体の円弧移動では、重力下では直上方向の加力となって、地面等の対象を下方に押すだけで、対象との関係が後方に蹴る摩擦がないために、回転による出力による回転力は、その現時点の移動と関係なく重心移動に変換して、第一撃後の、直線の作用反作用ては廃棄される出力を回転力として利用できるとともに、発生した重心を押さない回転力による重心移動は、重心は移動しており、その時点の停止又は移動状態に関係なく累積する。
【0053】
そのため、実施例では対象が滑る等とのトラブルは駆動力を発生する回転体では発生せず、重力下であるため、対象が滑る等の影響を受けずに対象上を転がり輪で転がり、重力による横方向の摩擦の影響を受けず、無重力下でも、摩擦を必要としないため、移動が可能となる移動方法および移動体である。
【0054】
以上回転体の移動は、重心を押して直線移動する従来の移動方法の他に、回転体の移動には、円弧移動の回転体独自の移動原理による発明である。
上記事実現象を、ロケット等の重心を押して移動する現象と同一視したために、出力の浪費を招く、旧来古来の重心を押す、直線の作用反作用の動きに慣れ、地球温暖化等を来している。
これを要するに、 物体が、重心に直角又は接線に出力を受けて移動しない回転体となった回転体の有する回転力を、逆回転方向の直角又は接線に加力して、加力点を支点に公転して、発生した二方向の合力で円弧移動して、回転体が円弧移動による重心移動を繰り返すことにより、回転体および回転体の属する系が移動することを特徴とする物体の回転による移動方法および移動体である。
【産業上の利用可能性】
【0055】
本願は、先願(2005−112718)同様に未確認飛行物体の移動原理の解明途上で発見した物体(回転体)の運動および移動原理に基づく、地上でもありふれた宇宙自然が語る、現象原理に基づいた発明である。
吾人は直線の作用反作用に慣れて、回転体の有する移動(運動)原理を、先願の時点では理解されない、現象としてのみの捕らえ方しかできなかったが、本願では、その原理が有り得ない現象ではなく、爆発等の出力による物体移動の内の回転体となる原理および回転体の有する移動しない回転力を、逆回転方向の回転軸(重心)に直角又は接線に加力することにより、円弧移動力を解放して重心移動する原理を解明して、先願が正鵠を得ていることを実証し、解明発展した原理による発明であることは、作用と反作用が直角で成り立っていることを証明詳述した。
回転体の重心に直角又は接線に加力して移動する移動原理による、重心を直接おさないために、移動速度が累積する回転体による移動方法の発見による発明は、物体の移動をもって発展する人類にかかる危機に対処して資する。
【0056】
重力下で回転体から力を得る方法として、古来吾人は回転体の有する、二方向の合力を用いて出力を得る方法ではなく、回転体の回転軸を固定して、回転体の有する二方向の合力移動成分の内の回転方向成分のみを、用いて移動力としたために、重力下で重心を押す直線の作用反作用の出力と等しく見えて同一と混同して用いてきた結果が現状である。
物体(回転体)の移動原理を、重力下の地上での重心を押す、物体の動きをもって理解しようとすれば、直角の作用反作用が存在するとする、先願同様に理解されない現象であるが、宇宙誕生より直線の出力が、直線移動していない物質の回転運動が主体をなしている、無重力下の宇宙からみれば、先願同様重力下の対象に依存して移動する、あるいは重心を押す移動と、接線を押す移動〔運動〕を同一視する、物体(回転体)の動きのほうが特殊であることが、容易に理解できる。
【0057】
直角の作用反作用の存在が否定されている先願は、重心に直角又は接線への出力の加力による回転体の回転力を、直線移動しない円弧移動による重心移動により失って、回転しない物体となる現象原理による発明であり、回転体への加力(接線)方向に対して、直角の出力を得る円弧移動である。
【0058】
本願発明の骨子は、回転体の移動が従来のものの重心を押す、直線の作用反作用によらず、回転体が円弧移動する原理による移動方法および移動体の発明である。
【0059】
したがって、重心に直角又は接線に、出力で直線の作用反作用で入力した、回転体となる物体の重心移動しない回転力が、入力と逆方向に円弧として表れた重心移動力の現象事実であり、その間に回転を地面等の対象に伝達して摩擦により、再度回転として後方に蹴る移動方法等と、根本的に異なり、回転を介在することにより出力のロスがない、重力下、無重力下に関係なく移動する、出力の浪費が原因とする地球温暖化等の環境悪化を防止する、移動方法を特徴とする移動方法および移動体の発明である。
【符号の説明】
【0060】
1 回転体。
1´ 仮想円。
1〃 回転方向の矢印。
2 支持体。
2´ 受け部位。
3 回転軸。
4 加力点。
5 受け部。
6 転がり輪。
7 対象。
8 接線方向の点線。
9 穴。
10 伸縮材。
11 移動軌跡。
12 台車。
13 衝立。
14 長穴。
【受託番号】
【0061】
【配列表フリーテキスト】
【0062】
【配列表】
【0063】
【特許請求の範囲】
【請求項1】
回転軸以外の外周部に逆回転方向の支点となる突起の加力点を設置した回転体の回転軸を、下端に転がり輪を有する支持体の両側の直立部位に穿設した長穴内に上下動可能に挿入して、下端に転がり輪を有して、支持体の内側を前後動可能に、加力点の受け部を別個に設けて、伸縮材で連結したことを特徴とする物体の回転による移動体。
【請求項2】
出力で物体を回転して、加力点が回転体の回転で受け部上に当接した状態から、回転体の回転軸が加力点を支点に回転して、支持体を受け部側に引き寄せつつ、直上に達して移動するとともに伸縮材は縮んで、回転体が直上を過ぎて、受け部が伸縮材により元の位置関係に復帰する円弧移動動作を繰り返して、回転体および回転体の属する系全体が移動することを特徴とする請求項1記載の物体の回転による移動方法。
【請求項3】
出力で回転する回転体が回転軸以外の外周に、回転体全体が回転する加力点を設置して、逆回転方向の重心又は回転軸に直角又は接線に加力して、加力点を支点に全体が公転して、発生した加力方向成分と、直角方向成分の二成分で円弧移動を繰り返して、直角方向成分で直角方向に移動することを特徴とする物体の回転による移動方法および移動体。
【請求項4】
出力で回転する回転体が、請求項3の重心の円弧移動を公転ごとに繰り返して、発生した移動速度が元の移動状態に累積することを特徴とする請求項1又は請求項2又は請求項3記載の物体の回転による移動方法および移動体。
【請求項5】
請求項3の移動体の回転体を出力で回転して、駆動装置を有しない被移動体に搭載して、後方に蹴ることなく対象を下方に直角に押して、円弧移動して横方向成分で被移動体ごと繰り返して横移動することを特徴とする請求項1摩又は請求項2又は請求鋼3又は請求項4記載の物体の回転による移動方法および移動体。
【請求項6】
出力により物体の重心を直角又は接線を押して、重心移動しない回転体を形成した、該回転体に、重心に直角又は接線に、逆転方向に加力して円弧移動を繰り返す移動方法を特徴とする移動方法および移動体。
【請求項1】
回転軸以外の外周部に逆回転方向の支点となる突起の加力点を設置した回転体の回転軸を、下端に転がり輪を有する支持体の両側の直立部位に穿設した長穴内に上下動可能に挿入して、下端に転がり輪を有して、支持体の内側を前後動可能に、加力点の受け部を別個に設けて、伸縮材で連結したことを特徴とする物体の回転による移動体。
【請求項2】
出力で物体を回転して、加力点が回転体の回転で受け部上に当接した状態から、回転体の回転軸が加力点を支点に回転して、支持体を受け部側に引き寄せつつ、直上に達して移動するとともに伸縮材は縮んで、回転体が直上を過ぎて、受け部が伸縮材により元の位置関係に復帰する円弧移動動作を繰り返して、回転体および回転体の属する系全体が移動することを特徴とする請求項1記載の物体の回転による移動方法。
【請求項3】
出力で回転する回転体が回転軸以外の外周に、回転体全体が回転する加力点を設置して、逆回転方向の重心又は回転軸に直角又は接線に加力して、加力点を支点に全体が公転して、発生した加力方向成分と、直角方向成分の二成分で円弧移動を繰り返して、直角方向成分で直角方向に移動することを特徴とする物体の回転による移動方法および移動体。
【請求項4】
出力で回転する回転体が、請求項3の重心の円弧移動を公転ごとに繰り返して、発生した移動速度が元の移動状態に累積することを特徴とする請求項1又は請求項2又は請求項3記載の物体の回転による移動方法および移動体。
【請求項5】
請求項3の移動体の回転体を出力で回転して、駆動装置を有しない被移動体に搭載して、後方に蹴ることなく対象を下方に直角に押して、円弧移動して横方向成分で被移動体ごと繰り返して横移動することを特徴とする請求項1摩又は請求項2又は請求鋼3又は請求項4記載の物体の回転による移動方法および移動体。
【請求項6】
出力により物体の重心を直角又は接線を押して、重心移動しない回転体を形成した、該回転体に、重心に直角又は接線に、逆転方向に加力して円弧移動を繰り返す移動方法を特徴とする移動方法および移動体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−242960(P2010−242960A)
【公開日】平成22年10月28日(2010.10.28)
【国際特許分類】
【出願番号】特願2009−106985(P2009−106985)
【出願日】平成21年4月6日(2009.4.6)
【出願人】(390005348)
【Fターム(参考)】
【公開日】平成22年10月28日(2010.10.28)
【国際特許分類】
【出願日】平成21年4月6日(2009.4.6)
【出願人】(390005348)
【Fターム(参考)】
[ Back to top ]