
物体位置推定システム、物体位置推定方法、及び、物体位置推定プログラム

【課題】観測装置としてタグリーダのみを用いた構成により、タグ所持者の検出のみならず、タグを所持しない不審物体の検出を行うことのできる物体位置推定システムを提供する。
【解決手段】タグリーダ101が、定常時可読位置タグデータベース104に検出可能と記録されている位置タグを検出しなかったときに、人物タグデータベース102に記録されている人物タグが検出されているか否かを確認し、人物タグが検出されていないときには、位置タグの位置に不審物体が存在すると判断し、人物タグが検出されているときには、位置タグの位置には、人物タグに記録された人物IDが示す人が存在すると判断する物体位置推定部105と、を備える。
【解決手段】タグリーダ101が、定常時可読位置タグデータベース104に検出可能と記録されている位置タグを検出しなかったときに、人物タグデータベース102に記録されている人物タグが検出されているか否かを確認し、人物タグが検出されていないときには、位置タグの位置に不審物体が存在すると判断し、人物タグが検出されているときには、位置タグの位置には、人物タグに記録された人物IDが示す人が存在すると判断する物体位置推定部105と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、タグリーダの観測範囲内に存在する人物の位置を判断する物体位置推定システム、物体位置推定方法、及び物体位置推定プログラムに関する。
【背景技術】
【0002】
従来、物体の位置を検出する技術として、タグリーダ(RFID測位装置)とカメラ(防犯カメラ)との測位データをそれぞれ比較(重ね合わせ)し、タグリーダとカメラとの両測位データが揃っている箇所には、タグを所持した人物が存在し、カメラの測位データしか無い箇所には、タグを所持していない不審者がいる、と判断しているものがあった(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−311111号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1で使用されているカメラは、環境条件の変化(照明条件など)に弱いという特徴があり、夜間又は煙が立ち込めている災害時などにも安定した運用を行うことは困難であると考える。前記条件においてはタグリーダのみを用いることも可能であるが、このとき、タグを所持していない不審者の検出ができなくなる。また、観測装置にカメラを用いると、人は「監視されている」という意識を持つため、例えば、家庭内等の一般環境への普及の困難であると考える。
【0005】
そこで、本発明は、前記課題を解決するもので、観測装置としてタグリーダのみを用いる構成により、タグ所持者の検出のみならず、タグが付与されていない不審物体、および、タグを所持していない不審者の検出をロバストに行うことのできる物体位置推定システム、物体位置推定方法、及び、物体位置推定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
前記目的を達成するために、本発明は以下のように構成する。
【0007】
本発明の1つの態様によれば、人の出入りする環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDを読み取るタグリーダと、
前記環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、
前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、
前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースと、
前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると判断する物体位置推定部と、
を備える物体位置推定システムを提供する。
【0008】
本発明の別の態様によれば、人の出入りする環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDをタグリーダで読み取ったのち、
前記環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースとを使用して、
前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると物体位置推定部で判断する、
物体位置推定方法を提供する。
【0009】
本発明のさらに別の態様によれば、コンピュータに、
人の出入りする環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、
前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、
前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースと、
前記環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDをタグリーダで読み取ったのち、前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると判断する物体位置推定部の機能を実現させるための物体位置推定プログラムを提供する。
【発明の効果】
【0010】
本発明の物体位置推定システム、物体位置推定方法、及び、物体位置推定プログラムによれば、観測装置としてタグリーダのみを用いた構成により、タグ所持者の検出のみならず、タグを所持しない不審物体の検出を行うことができる。
【図面の簡単な説明】
【0011】
【図1A】本発明の第1実施形態に係る物体位置推定システムの構成を示すブロック図
【図1B】本発明の第1実施形態に係る物体位置推定システムの構成の物体位置判断部を示すブロック図
【図2】本発明の第1実施形態に係る物体位置推定システムでの観測対象が存在する環境の一例である生活空間としての部屋における観測状況を説明する図
【図3】本発明の第1実施形態に係る物体位置推定システムの処理を示すフローチャート
【図4】本発明の第1実施形態に係る物体位置推定システムのタグリーダの観測データの一例を示す図
【図5】本発明の第1実施形態に係る物体位置推定システムの人物タグデータベースの一例を示す図
【図6】本発明の第1実施形態に係る物体位置推定システムの位置タグデータベースの一例を示す図
【図7】本発明の第1実施形態に係る物体位置推定システムの定常時可読位置タグデータベースの一例を示す図
【図8A】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの構成を示すブロック図。
【図8B】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの物体位置判断部の構成を示すブロック図。
【図9】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムでの観測対象が存在する環境の一例である生活空間としての部屋における観測状況を説明する図
【図10A】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの定常時可読位置タグデータベースの一例(電動雲台を使用する場合の例)を示す図
【図10B】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの定常時可読位置タグデータベースの一例(電動雲台を使用する場合の例)を示す図
【図10C】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの定常時可読位置タグデータベースの一例(可動レールを使用する場合の例)を示す図
【図10D】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの定常時可読位置タグデータベースの一例(可動レールを使用する場合の例)を示す図
【図10E】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの定常時可読位置タグデータベースの一例(電波強度を調整する場合の例)を示す図
【図10F】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの定常時可読位置タグデータベースの一例(電波強度を調整する場合の例)を示す図
【図11】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムでの観測対象が存在する環境である生活空間としての部屋における観測状況を説明する図
【図12】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムでの観測対象が存在する環境である作業環境としての部屋における観測状況を説明する図
【図13】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの処理を示すフローチャート
【図14A】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムのタグリーダの観測データの一例を示す図
【図14B】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムのタグリーダの観測データ(電動雲台をX軸方向に45°回転させたときのタグリーダの観測データ)の一例を示す図
【図14C】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムのタグリーダの観測データ(電動雲台をX軸方向に−30°回転させたときのタグリーダの観測データ)の一例を示す図
【図15A】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムにおいて、部屋内に配置する位置タグの間隔を小さくした例を示す図
【図15B】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムにおいて、人が倒れたときに検出できなくなった位置タグである未検出タグと、倒れた人の様子を示す図
【図15C】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムにおいて、各位置タグに対応するタグIDを示す図
【図16A】本発明の第2実施形態に係る人の転倒を判断可能な物体位置推定システムの構成を示すブロック図
【図16B】本発明の第2実施形態に係る人の転倒を判断可能な物体位置推定システムの物体位置判断部の構成を示すブロック図の構成を示す図。
【図17】本発明の第2実施形態に係る人の転倒を判断可能な物体位置推定システムの処理を示すフローチャート
【図18】本発明の第2実施形態に係る人の転倒を判断可能な物体位置推定システムの観測履歴データベースの一例を示す図
【発明を実施するための形態】
【0012】
以下に、本発明にかかる実施の形態を図面に基づいて詳細に説明する。
【0013】
以下、図面を参照して本発明における実施形態を詳細に説明する前に、本発明の種々の態様について説明する。
【0014】
本発明の第1態様によれば、人の出入りする環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDを読み取るタグリーダと、
前記環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、
前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、
前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースと、
前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると判断する物体位置推定部と、
を備える物体位置推定システムを提供する。
【0015】
本発明の第2態様によれば、前記物体位置推定部は、
前記定常時可読位置タグデータベースに記録されている位置タグの中で、前記タグリーダでは検出できなかった位置タグが存在するか否かを判断する未検出位置タグ判断部と、
前記タグリーダでは検出できなかった位置タグの配置されている位置を、前記位置タグデータベースを参照することにより判断する未検出位置タグ位置判断部と、
前記人物タグデータベースに記録されている人物タグの中で、前記タグリーダで検出された人物タグが存在するか否かを判断する人物タグ判断部と、
前記人物タグが存在していた場合、前記タグリーダでは検出できなかった位置タグの位置に、前記人物タグを所持する人物が存在すると判断し、前記人物タグが存在していなかった場合、前記タグリーダでは検出できなかった位置タグの位置に、前記人物タグを所持していない人物が存在すると判断する物体位置判断部と、
をさらに備える第1の態様に記載の物体位置推定システムを提供する。
【0016】
本発明の第3態様によれば、前記定常時可読位置タグデータベースには、前記タグリーダの姿勢、位置、又は、電波強度毎に、前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグの識別IDとが分別して記録されており、
前記未検出位置タグ判断手段の判断結果に基づき、定常時において検出されるべき位置タグの中で検出されなかった位置タグが複数存在した場合、どの位置タグの位置に、人物タグを所持した人、もしくは、人物タグを所持しない人が存在するのかを判断するため、前記検出されなかった位置タグの再検出処理の順序を決定する再検出処理判断手段と、
前記再検出処理判断手段で決定された再検出処理の順序に基づき、前記検出されなかった位置タグを切り分けて、個別に検出可能となるような前記タグリーダの姿勢、位置、又は、電波強度を前記定常時可読位置タグデータベースに基づいて判断し、前記判断結果を、前記タグリーダの観測範囲を変更する観測範囲制御部と、
前記観測範囲制御部からの前記観測範囲の変更制御により、前記タグリーダの姿勢、位置、又は、電波強度を変更するタグリーダ調整装置とを備える、第2の態様に記載の物体位置推定システムを提供する。
【0017】
本発明の第4態様によれば、前記タグリーダ調整装置は、前記位置タグの上に前記人が存在したときに、前記位置タグが検出されなくなると前記未検出位置タグ判断部で判断したとき、前記タグリーダの電波の出力強度を調整する出力調整部である、第3の態様に記載の物体位置推定システムを提供する。
【0018】
本発明の第5態様によれば、前記出力調整部は、前記人物タグが検出されたとき、前記定常時可読位置タグデータベースに検出可能と記録されている識別IDを持つ位置タグが全て検出されていた場合には、前記位置タグの中の何れかの位置タグが検出されなくなると前記未検出位置タグ位置判断部で判断するまで、前記タグリーダの電波の出力強度を少しずつ弱めていく、第4の態様に記載の物体位置推定システムを提供する。
【0019】
本発明の第6態様によれば、検出した前記人の位置の履歴を記録しておく観測履歴データベースと、
前記人が一人で存在したときに、検出できなくなる位置タグの枚数を基に前記人が一人で存在すると判断される状況において、前記枚数よりも多くの枚数の位置タグが検出されなかった場合、前記人が倒れている可能性があると判断する転倒判断部とをさらに備える、
第1から第5の何れか1つの態様に記載の物体位置推定システムを提供する。
【0020】
本発明の第7態様によれば、人の出入りする環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDをタグリーダで読み取ったのち、
前記環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースとを使用して、
前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると物体位置推定部で判断する、
物体位置推定方法を提供する。
【0021】
本発明の第8態様によれば、コンピュータに、
人の出入りする環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、
前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、
前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースと、
前記環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDをタグリーダで読み取ったのち、前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると判断する物体位置推定部の機能を実現させるための物体位置推定プログラムを提供する。
【0022】
以下、本発明の実施の形態について、図面を参照しながら説明する。
【0023】
(第1実施形態)
本発明の第1実施形態では、人が出入り可能でかつ閉じた環境の一例である部屋に対して、天井にタグリーダを設置し、床に位置情報を記録させた位置タグを配置することによって、部屋に出入りする人が、人物IDを示す人物タグを所持しているか否かを判別した上で、人の位置を検出している。
【0024】
図1A及び図1Bは、本発明の第1実施形態に係る物体位置推定システムの構成及び物体位置判断部の構成を示す図である。
【0025】
本発明の第1実施形態に係る物体位置推定システム90は、タグリーダ101と、物体位置推定装置91とで構成されている。物体位置推定装置91は、人物タグデータベース102と、位置タグデータベース103と、定常時可読位置タグデータベース104と、物体位置推定部105とを備えるように構成されている。
【0026】
タグリーダ101は、所定の観測周期(例えば100msなど)毎に、部屋201内の観測エリア内を観測し、位置情報が記録されたタグ(位置タグ)と、人203が所持するタグ(人物タグ)の検出を行う。
【0027】
人物タグデータベース102には、人203を示す人物IDと、当該人203が所持するタグID(タグ固有の識別ID)とが紐付けされて記録されている。
【0028】
位置タグデータベース103には、部屋201の例えば床面の多数の位置タグ205(205A〜205Cなど)が配置されている位置情報と、それぞれの位置タグ205のタグID(タグ固有の識別ID)とが紐付けされて記録されている。
【0029】
定常時可読位置タグデータベース104には、人が部屋201内に存在しない状況(定常時)において、前記位置タグ205の中で検出できる位置タグ205と検出できない位置タグ205のタグIDが分別して記録されている。
【0030】
物体位置推定部105は、タグリーダ101が、定常時可読位置タグデータベース104に検出可能と記録されている位置タグ205を検出しなかったときに、人物タグデータベース102に記録されている人物タグ204が検出されているか否かを確認し、人物タグ204が検出されていないときには、前記位置タグ205の位置に不審物体が存在すると判断し、人物タグ204が検出されているときには、前記位置タグ205の位置には、前記人物タグ204に記録された人物IDが示す人203が存在すると判断する。
【0031】
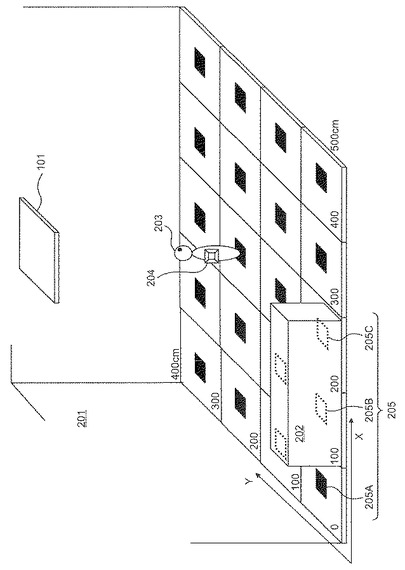
図2に、本発明の第一実施形態に係る物体位置推定システムの構成要素であるタグリーダ101を備えた、環境の一例である部屋201を示す。部屋201の四角形の天井の中央付近には、真下に向けられたタグリーダ101が設置されているが、部屋201の床に配置されたタグ205を検出できるのであれば、タグリーダ101を壁又は天井の隅に配置しても構わない。部屋201内には、人物タグ204を所持した人203が出入り可能であり、図2の状態では、人203が部屋201内に存在していると仮定する。部屋201の床には、位置情報を記録した位置タグ205(205A,205B,205C,・・)が多数個配置されている。尚、前記位置タグ205には、個々に配置されている部屋201中の位置情報が記録されているものとし、任意の一つの位置タグを示す場合には、この任意のタグをタグ205として説明を行う。そして、部屋201内には、家具としての棚202が設置され、棚202により一部のタグ205(例えば、205B,205C)が覆われている。
【0032】
以下、図3のフローチャートに対応させながら、各構成要素について説明する。尚、図3は、前記物体位置推定システムの全体処理を示すフローチャートである。各ステップの処理を説明しながら、関連する構成についても説明する。
【0033】
<タグリーダの説明>
まず、ステップS301の処理において、タグリーダ101は、所定の観測周期(例えば100msなど)毎に、部屋201内を観測し、部屋201内に存在する人203の所持する人物タグ204の検出と、部屋201に配置されている位置タグ205の検出とを行う。図4に、図2に示された部屋201内を、タグリーダ101で観測したときの観測データの一例を示す。タグリーダ101で観測したときの観測データは、タグリーダ101の内部記憶部又は物体位置推定部105の内部記憶部などで記録しておく。図4に示す観測データには、人物タグID:PSN_001が示す人物タグ204と、位置タグID:POS_002, POS_003, POS_013が示す位置タグ205以外の全ての位置タグ205が検出されている。
【0034】
<人物タグ、および、人物タグデータベース102の説明>
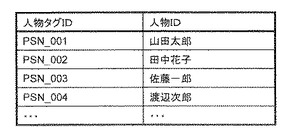
人物タグ204とは、部屋201内に進入することが許可されている人203に付与されるタグであり、人物タグデータベース102には、人203を示す人物IDと人203が所持するタグIDとが紐付けて記録されている。尚、前記人物IDは、前記人物タグ204の内部記憶に記録しておいても良い。図5に人物タグデータベース102の一例を示す。図5の人物タグデータベース102には、人物タグ204毎に固有に割り当てられるタグID(人物タグID)と、人203を示す人物ID(例えば、人物の名前)とが記録されている。例えば、人物タグID:PSN_001が記録されている人物タグ204は、山田太郎という人物が所持している人物タグ204であることを示す。尚、人物IDには、名前以外に管理番号などを用いても良い(会社であれば社員番号など)。
【0035】
<位置タグ、および、位置タグデータベース103の説明>
位置タグ205とは、部屋201内の床に配置されているタグであり、位置タグデータベース103には、位置タグ205のタグIDと、位置タグ205が配置されている位置情報とが紐付けて記録されている。尚、前記位置情報は、前記位置タグ205の内部記憶に記録しておいても良い。図6に位置タグデータベース103の一例を示す。図6の位置タグデータベース103には、位置タグ205毎に固有に割り当てられるタグID(位置タグID)と、位置タグ205が配置されている位置の情報(例えば位置座標)とが記録されている。例えば、位置タグID:POS_001が示す位置タグ205は、部屋201内における座標(50,50)の位置の配置されていることを示す。
【0036】
ステップS301に次いで、ステップS302の処理において、物体位置推定部105は、定常時可読位置タグデータベース104に検出可能と記録されている位置タグ205が全て検出されているか否かを判断する。位置タグ205が全て検出されていたと物体位置推定部105が判断する場合はステップS301の処理に戻り、位置タグ205が全て検出されていなかったと物体位置推定部105が判断する場合はステップS303の処理に進む。
【0037】
図7の定常時可読位置タグデータベース104を参照すると、定常時には位置タグID:POS_013が示す位置タグ205が検出可能であるのに対し、図4の観測データには前記位置タグID:POS_013が示す位置タグ205が検出されておらず、この図4のケースにおいては、ステップS303の処理に進むこととなる。前記位置タグ205が検出されなかった理由としては、タグリーダ101と前記位置タグ205の間に存在する人203の保有する水分により、タグリーダ101の出力する電波が減衰され、前記位置タグ205まで前記電波が到達できなかったためと考えられる。
【0038】
<定常時可読位置タグデータベースの説明>
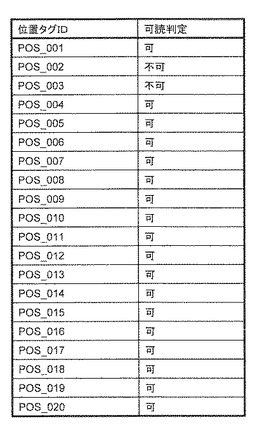
定常時可読位置タグデータベース104には、定常時(人が部屋201内に存在しない状況)において、検出可能な位置タグ205と、検出不可能な位置タグ205とが分別して記録されている。定常時位置タグデータベース104は、定常時(人203が存在していない状況)において、タグリーダ101を動作させ、各位置タグ205の検出可否を予め記録させておくものである。つまり、家具等の障害物の影響で検出されない位置タグ205、又は、位置タグ205自体が故障してしまっているため検出されない位置タグ205は、検出不可能な位置タグ205として分別されて、定常時可読位置タグデータベース104に記録されている。図7に定常時可読位置タグデータベース104の一例を示す。図7の定常時可読位置タグデータベース104には、位置タグ205のタグIDと、定常時における位置タグ205の可読判定(すなわち、「可」又は「不可」)とが記録されている。例えば、位置タグID:POS_001が示す位置タグ205Aは、「可」と記録されて、定常時に検出が可能であることを示し、位置タグID:POS_002が示す位置タグ205Bは、「不可」と記録されて、定常時でも検出が不可能であることを示している。これは、位置タグ205Bの配置されている位置(座標(150,50))に、棚202が設置されているためであり、タグリーダ101から出力される電波が位置タグ205Bまで届かないためである。
【0039】
ステップS303の処理において、物体位置推定部105は、人物タグデータベース102に記録されている人物タグ204が検出されているか否かを判断する。人物タグ204が検出されていたと物体位置推定部105が判断した場合はステップS304の処理に進み、人物タグ204が検出されていなかったと物体位置推定部105が判断した場合はステップS305の処理に進む。図4の観測データには、人物タグID:PSN_001が示す人物タグ204が検出されているため、この図4のケースにおいては、ステップS304の処理に進むこととなる。
【0040】
ステップS304の処理において、物体位置推定部105は、ステップS302の処理において検出されなかった位置タグ205の配置位置を、位置タグデータベース103を参照することにより取得し、更に、ステップS303の処理において検出された人物タグ204を所持する人203を、人物タグデータベース102を参照することにより物体位置推定部105で取得し、前記配置位置に、人物タグIDが示す人203が存在すると物体位置推定部105で判断する。その後、ステップS301に戻る。
【0041】
ステップS302の処理において検出されなかった位置タグ205(位置タグID:POS_013)の配置位置は、図6の位置タグデータベース103を参照することにより、座標(250,250)であることが物体位置推定部105で分かる。更に、ステップS303の処理において検出された人物タグ204(人物タグID:PSN_001)が示す人203は、図5の人物タグデータベース102を参照することにより、山田太郎さんであることが物体位置推定部105で分かる。
【0042】
以上から、部屋201の座標(250,250)の位置に、正規人物である山田太郎さんが存在すると物体位置推定部105で判断することができる。
【0043】
ステップS305の処理において、物体位置推定部105は、ステップS302の処理において検出されなかった位置タグ205の配置位置を、位置タグデータベース103を参照することにより取得し、前記配置位置に、人物タグ204を所持しない不審物体が存在すると物体位置推定部105で判断する。例えば、図2の人203が人物タグ204を所持していなかったとする。すると、ステップS302の処理において検出されなかった位置タグ205(位置タグID:POS_013)の配置位置は、図6の位置タグデータベース103を参照することにより座標(250,250)であることが物体位置推定部105で分かる。更に、ステップS303の処理において人物タグ204が検出されていないことが物体位置推定部105で分かる。その後、ステップS301に戻る。
【0044】
以上の図3の処理から、部屋201の座標(250,250)の位置に、不審者、あるいは、不審物体が存在すると物体位置推定部105で判断することができる。
【0045】
ここで、物体位置推定部105の詳細な動作について説明する。
【0046】
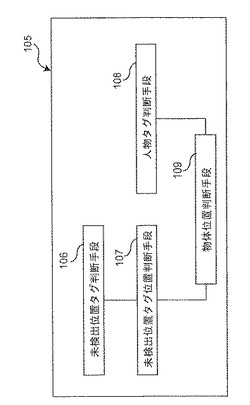
物体位置推定部105は、図1Bに示すように、未検出位置タグ判断手段(未検出位置タグ判断部)106と、未検出位置タグ位置判断手段(未検出位置タグ位置判断部)107と、人物タグ判断手段(人物タグ判断部)108と、物体位置判断手段(物体位置判断部)109とを備えて構成されている。
【0047】
未検出位置タグ判断手段106は、タグリーダ101のタグIDの検出結果と、定常時可読位置タグデータベース104を参照し、定常時可読位置タグデータベース104の可読判定に「可」と記録されている位置タグ205のタグIDの中から、タグリーダ101が検出したタグID以外のタグIDを抽出し、抽出したタグIDを持つ位置タグ205をタグリーダ101で検出できなかった位置タグ205であると判断する。未検出位置タグ判断手段106の判断結果は、未検出位置タグ位置判断手段107に出力する。
【0048】
以下、未検出位置タグ位置判断手段107と、人物タグ判断手段108と、物体位置判断手段109との説明は、タグリーダ101で検出できなかった位置タグ205は1個であった場合を例として説明する。尚、タグリーダ101で検出できなかった位置タグ205が2個以上であった場合に関しては後述する。
【0049】
未検出位置タグ位置判断手段107は、位置タグデータベース103に記録されている、タグIDに紐付けられた位置タグ205の配置座標を参照することにより、タグリーダ101で検出できなかった位置タグ205が配置されている座標を判断する。未検出位置タグ位置判断手段107の判断結果は、物体位置判断手段109に出力する。
【0050】
人物タグ判断手段108は、タグリーダ101のタグIDの検出結果と、人物タグデータベース102を参照し、人物タグデータベース102に記録されている人物タグ204のタグIDの中から、タグリーダ101が検出したタグIDを抽出し、抽出したタグIDを持つ人物タグ204を、タグリーダ101で検出した人物タグ204であると判断する。人物タグ判断手段108の判断結果は、物体位置判断手段109に出力する。
【0051】
物体位置判断手段109は、タグリーダ101で検出された人物タグ204が存在した場合、タグリーダ101で検出できなかった位置タグ205が配置されている座標に、タグリーダ101で検出された人物タグ204を所持する人物が存在すると判断し、タグリーダ101で検出された人物タグ204が存在しなかった場合、タグリーダ101で検出できなかった位置タグ205が配置されている座標に、人物タグ204を所持しない人物(不審物体)が存在すると判断する。
【0052】
このようにして、第1実施形態によれば、観測装置としてタグリーダ101のみを用いた構成により、タグ所持者の検出のみならず、タグを所持しない不審物体の検出を行うことができる。
【0053】
(第2実施形態)
タグリーダ101としてUHF帯のタグリーダを使用したとする。一般的に、UHF帯のタグリーダは、検出したタグの位置を知ることができない(前記タグリーダの観測範囲内に前記タグが存在するか否かのみを判断することが可能)。そのため、複数の位置タグ205と人物タグ204とが検出された場合、どの人203が、どの位置タグ205の位置に存在するかを推定することができなかった。どの人203が、どの位置タグ205の位置に存在するかを推定するためには、前記タグリーダの観測範囲を可変にする(観測範囲を移動させる、観測範囲を狭くするなど)などの処理を行う必要がある。
【0054】
本発明の第2実施形態では、閉じた環境の一例である部屋201に対して、天井にタグリーダ101を設置し、床に位置情報を記録させた位置タグ205を配置することによって、人が人物IDを示す人物タグ204を所持しているか否かを判別した上で、複数の人203A,203Bの位置を検出している。
【0055】
図8A及び図8Bは、本発明の第2実施形態に係る物体位置推定装置の構成を示す図である。
【0056】
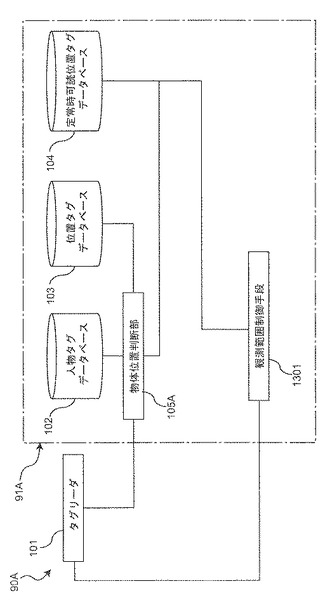
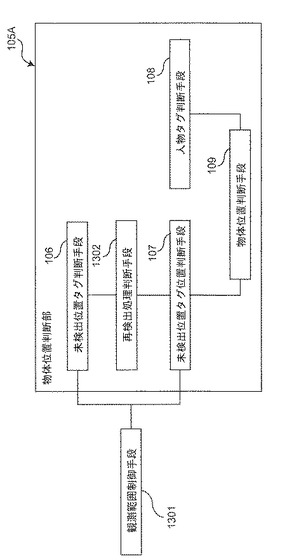
本発明の第2実施形態に係る物体位置推定システム90Aは、タグリーダ101と、物体位置推定装置91Aとで構成されている。物体位置推定装置91Aは、人物タグデータベース102と、位置タグデータベース103と、定常時可読位置タグデータベース104と、物体位置推定部105Aと、観測範囲制御手段(観測範囲制御部)1301とを備えるように構成されている。物体位置推定部105Aは、図8Bに示すように、未検出位置タグ判断手段(未検出位置タグ判断部)106と、再検出処理判断手段(再検出処理判断部)1302と、未検出位置タグ位置判断手段(未検出位置タグ位置判断部)107と、人物タグ判断手段(人物タグ判断部)108と、物体位置判断手段(物体位置判断部)109とを備えるように構成されている。尚、観測範囲制御手段1301、および、再検出処理判断手段1302以外の各手段、および、データベースは第1実施形態で説明済みのため、ここでの説明は省略する。
【0057】
観測範囲制御手段1301は、タグリーダ101の観測範囲を変更するための手段であり、その具体的な方法として、タグリーダ101が装着された電動雲台の姿勢(回転範囲)、タグリーダ101が装着された可動部の可動レール上での移動範囲、又は、タグリーダ101に供給される電波強度の変更などが考えられる。
【0058】
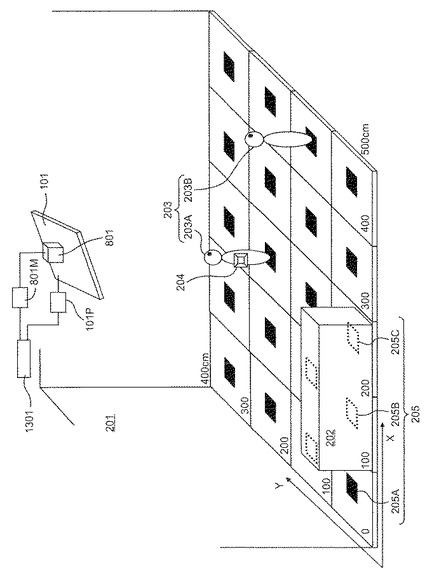
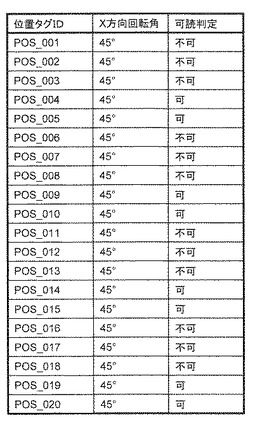
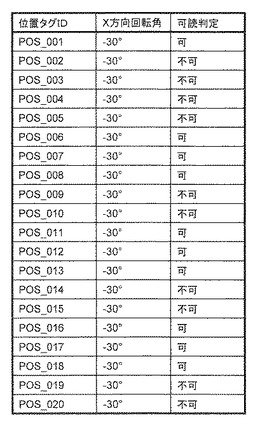
電動雲台を用いる場合、図9に、電動雲台801にタグリーダ101を装着させた部屋201の例を示す。電動雲台801は、タグリーダ調整装置の一例として、タグリーダ101を回転させる姿勢調整用モータ801Mを備え、姿勢調整用モータ801Mは観測範囲制御手段1301で制御される。姿勢調整用モータ801Mの駆動により電動雲台の姿勢(回転範囲)を制御すると、電動雲台801に装着されたタグリーダ101の向きを変化させることになり、タグリーダ101のアンテナから出力される電波の方向を変化させることができる。また、図10A及び図10Bに、電動雲台801の姿勢に応じたタグリーダ101の観測範囲を記録した定常時可読位置タグデータベース104の例をそれぞれ示す。図10Aが示す定常時可読位置タグデータベース104には、定常時に、電動雲台801を姿勢調整用モータ801Mの駆動によりX座標方向に45°回転させたときに取得可能な位置タグ205が記録されている。また、図10Bが示す定常時可読位置タグデータベース104には、定常時に、電動雲台801を姿勢調整用モータ801Mの駆動によりX座標方向に−30°回転させたときに取得可能な位置タグ205が記録されている。図10A及び図10Bでは、X方向に関する回転角のみが示されているが、姿勢調整用モータ801Mの駆動により、Y方向の回転角、もしくは、X方向とY方向の組み合わせの回転角に応じて観測範囲を記録しておいても良い。
【0059】
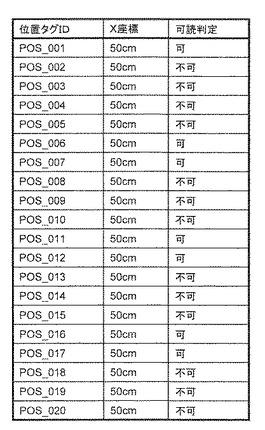
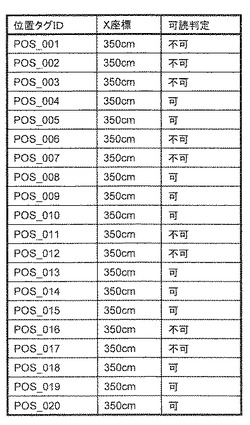
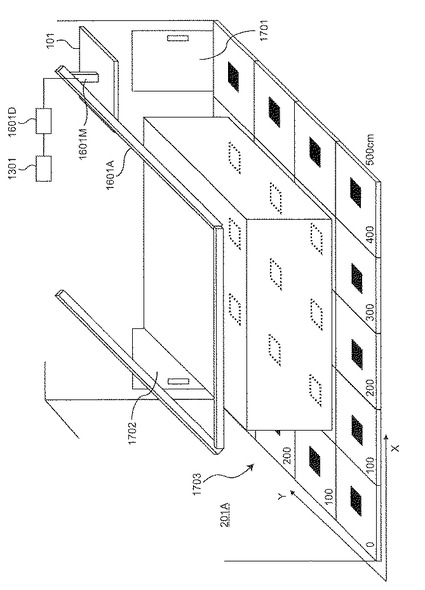
一方、可動レールを用いる場合、タグリーダ101を装着した可動部を可動レールに沿って移動させることにより、タグリーダ101の観測範囲を変更させることができる。図11に、可動レール1601に沿って、タグリーダ101を装着した可動部1601Mを進退移動させる部屋201の例を示す。可動部1601Mには、タグリーダ調整装置の一例としてのモータなどの可動部移動用駆動装置1601Dが備えられ、駆動装置1601Dは観測範囲制御手段1301で制御される。また、図10C及び図10Dに、タグリーダ101の中心部の可動レール1601上の位置に応じたタグリーダ101の観測範囲を記録した定常時可読位置タグデータベース104の例を示す。図10Cが示す定常時可読位置タグデータベース104には、定常時に、タグリーダ101の中心部が可動レール1601のX座標50cmの位置に存在するときに取得可能な位置タグ205が記録されている。また、図10Dが示す定常時可読位置タグデータベース104には、定常時に、タグリーダ101の中心部が可動レール1601のX座標350cmの位置に存在するときに取得可能な位置タグ205が記録されている。図10C及び図10Dでは、可動レール1601を部屋201のX座標方向に沿って配置しているが、部屋201のレイアウトに応じて自由に可動レール1601を配置しても良い。例えば、美術館又は工場において人203の移動可能な経路、又は、移動経路が予め決定している場合、前記経路に沿って可動レール1601Aを装着しておいても良い。図12に移動可能な経路が予め設定されている部屋201Aの例を示す。図12の例では、部屋201Aの入口1701から出口1702に至るまでの経路1703上の天井に可動レール1601Aを装着して、可動レール1601Aに沿って、タグリーダ101を装着した可動部1601Mを進退移動させる。
【0060】
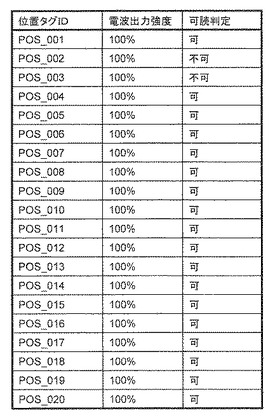
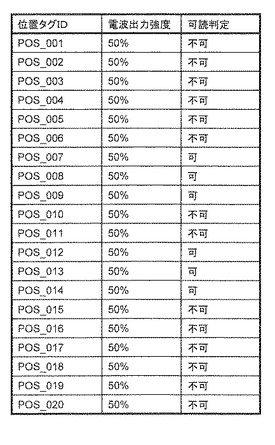
また、電波強度を変更する場合、図9に示すように、タグリーダ調整装置の一例として機能する、タグリーダ101のアンテナから出力される電波の出力調整を出力調整部(出力調整装置)101Pで行うことで、タグリーダ101の観測範囲を変更させることができる。図10E及び図10Fに、タグリーダ101のアンテナから出力される電波強度に応じたタグリーダ101の観測範囲を記録した定常時可読位置タグデータベース104の例を示す。図10Eが示す定常時可読位置タグデータベース104には、定常時に、タグリーダ101のアンテナから出力される電波の出力値を100%に出力調整部101Pで設定したときに取得可能な位置タグ205が記録されている。また、図10Fが示す定常時可読位置タグデータベース104には、定常時に、タグリーダ101のアンテナから出力される電波の出力値を50%に出力調整部101Pで設定したときに取得可能な位置タグ205が記録されている。
【0061】
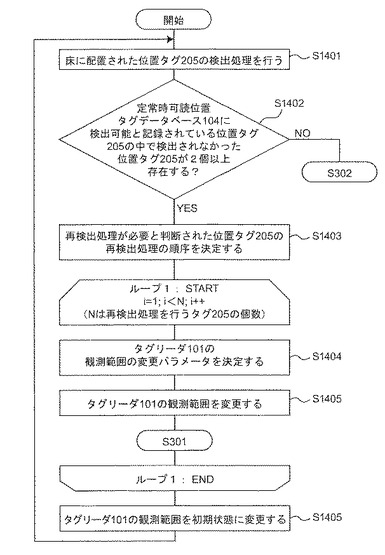
再検出処理判断手段1302は、未検出位置タグ判断手段106の判断結果に基づき、定常時において検出されるべき位置タグ205の中で検出されなかった位置タグ205が複数存在した場合、どの位置タグ205の位置に、人物タグ204を所持した人203、もしくは、人物タグ204を所持しない人203が存在するのかを判断するため、前記検出されなかった位置タグ205の再検出処理の順序を決定する。そして、再検出処理判断手段1302は、前記検出されなかった位置タグ205を切り分けて、個別に検出可能となるようなタグリーダ101の姿勢又は位置、もしくは、電波強度を定常時可読位置タグデータベース104に基づいて判断し、前記判断結果(タグリーダ101の姿勢、位置、又は、電波強度の変更情報)を、タグリーダ101の観測範囲変更要請として、再検出処理判断手段1302から観測範囲手段1301に出力する。前記判断結果(タグリーダ101の姿勢、位置、又は、電波強度の変更情報)及び未検出位置タグ判断手段106の判断結果は、未検出位置タグ位置判断手段107に出力する。
【0062】
以下に、図13のフローチャートを用いて、部屋201内に複数の人物が存在する場合の処理について説明する。尚、説明は、部屋201内に2人の人203A,203Bが存在している様子を示す図9に基づいて行う。また、観測範囲制御手段1301には、電動雲台801を用いた場合について説明する。
【0063】
まず、ステップS1401の処理において、タグリーダ101は、所定の観測周期(例えば100msなど)毎に、部屋201内を観測し、部屋201内に存在する人203の所持する人物タグ204の検出と、部屋201に配置されている位置タグ205の検出とを行う。
【0064】
次いで、ステップS1402の処理において、未検出位置タグ判断手段106は、定常時可読位置タグデータベース104に検出可能と記録されている位置タグの中で、検出されていない位置タグが2個以上存在しているか否かを判断する。検出されていない位置タグが2個以上存在していると未検出位置タグ判断手段106と判断した場合はステップS1403の処理に進み、検出されていない位置タグが1個以下存在していると未検出位置タグ判断手段106と判断した場合は図3のステップS302の処理に進む。
【0065】
図9の例では、定常時に検出可能な位置タグ205の内、座標(250,250)と座標(450,150)にそれぞれ配置されている位置タグ205が検出されず、人物タグ204が一つだけ検出される状況となっている。このときのタグリーダ101の観測データを図14Aに示す。座標(250,250)に配置されている位置タグ205(POS_010)と座標(450,150)に配置されている位置タグ205(POS_013)とが検出されていないことが分かる。この場合は、検出されていない位置タグが2個以上存在していると未検出位置タグ判断手段106と判断するので、ステップS1403の処理に進む。
【0066】
ステップS1403の処理において、再検出処理判断手段1302は、検出されなかった2個の位置タグ205(POS_010とPOS_013)を個別に再検出することを判断し、再検出する順序を決定する。これは、ここまでの処理の状態では、再検出処理判断手段1302は、人物タグ204(PSN_001)を所持する人203は、座標(250,250)か(450,150)のどちらに存在するのかを判断することができないためである。再検出処理判断手段1302による順番の決定方法は、例えば、タグIDのID番号の小さい順としても良い。タグIDのID番号の小さい順に再検出を行うものとした場合、位置タグ205(POS_010)、位置タグ205(POS_013)の順に、再検出処理判断手段1302で再検出を行うこととなる。尚、タグリーダ101の観測履歴を取っていた場合には、前記観測履歴に基づいて再検出の順序を再検出処理判断手段1302で決定しても良い。例えば、前回観測時に座標(250,250)の位置タグ205のみが検出されていなかった場合、今回は、座標(450,150)に配置されている位置タグ205の再検出を初めに行うとする。つまり、未だ(個別に)観測されていない位置タグ205を優先して再検出処理を行うとしても良い。
【0067】
ステップS1404の処理において、再検出処理判断手段1302は、ステップS1403の処理で決定した順序に従い、再検出を必要とする位置タグ205の再検出を行うためのタグリーダ101の姿勢、位置、又は、電波強度などのパラメータの決定を行う。具体的には、再検出処理判断手段1302は、定常時において、そのとき再検出しようとしているi番目(iは1以上の整数。)の位置タグ205を検出可能で、且つ、その他の再検出すべき位置タグ205は検出不可となるタグリーダ101の姿勢、位置、又は、電波強度のパラメータを決定する。例えば、タグIDがPOS_010の位置タグ205の再検出を行う場合、POS_010の位置タグ205が検出可能で、且つ、POS_013の位置タグ205が検出不可となる電動雲台801の傾きを、定常時可読位置タグデータベース104から再検出処理判断手段1302で求めればよい。図10Aに示した定常時可読位置タグデータベース104を見てみると、電動雲台801をX軸方向に45°回転させた場合に、POS_010の位置タグ205が検出可能で、且つ、POS_013の位置タグ205が検出不可になることが分かる。
【0068】
以上の処理によって、再検出処理判断手段1302は、タグリーダ101の観測範囲の変更パラメータを決定する。
【0069】
次いで、ステップS1405の処理において、観測範囲制御手段1301は、ステップS1404において再検出処理判断手段1302が決定したパラメータに基づいて、タグリーダ101の姿勢、位置、又は、電波強度の変更を行う。
【0070】
以上の処理を行ったうえで、ステップS301でタグリーダ101が観測を行うことにより、複数人物が部屋201に存在する状況においても、人物タグ204を所持した人203、所持しない人203がそれぞれどの位置タグ205の位置に存在するのかを判断することが可能となる。尚、このとき、ステップS302で参照する定常時可読位置タグデータベース104は、そのときのタグリーダ101の姿勢、位置、又は、電波強度のパラメータにあったものを選択するものとし、前記姿勢、位置、又は、電波強度のパラメータの情報は、観測範囲制御手段1301から受け取るものとする。
【0071】
図14Bに、電動雲台801をX軸方向に45°回転させて、POS_010の位置タグ205の再検出処理を再検出処理判断手段1302及びタグリーダ101で行ったときの観測データ例を示す。図10Aに示した、電動雲台801をX軸方向に45°回転させたときの定常時可読位置タグデータベース104を参照すると、POS_010の位置タグ205のみが検出されていないことが再検出処理判断手段1302で分かる。
【0072】
また、図14Cに、電動雲台801をX軸方向に−30°回転させてPOS_013の位置タグ205の再検出処理を再検出処理判断手段1302及びタグリーダ101で行ったときの観測データの例を示す。図10Bに示した、電動雲台801をX軸方向に−30°回転させたときの定常時可読位置タグデータベース104を参照すると、POS_013の位置タグ205が検出されておらず、更に、PSN_001の人物タグ204が検出されていることが再検出処理判断手段1302で分かる。
【0073】
以上から、POS_013の位置タグ205の位置に、PSN_001の人物タグ204を所持した人203が存在し、POS_010の位置タグ205の位置に、人物タグ204を所持しない人203が存在することが再検出処理判断手段1302で分かる。
【0074】
また、タグリーダ101の例としてUWB(Ultra Wide Band)タグリーダを使用したとすると、例えば、三点測量の原理を用いて人物タグ204の位置を決定することができる。具体的には、タグリーダ101の構成要素としての各アンテナの設置位置は、タグリーダ101の内部記憶部などに予め記憶させておく。そして、各アンテナが各アンテナ自体の設置位置を中心として、各アンテナで検出した人物タグ204までの距離を半径とした球体を物体位置判断手段109で描く。このとき、物体位置判断手段109で、各アンテナによって描かれた球面が最も多く重なり合う位置を人203が所持している人物タグ204の存在する位置とすることができる。例えば、人物タグ204が、座標(253,249)で検出されたとすると、検出された人物タグ204からの距離の近い座標(250,250)に配置されている位置タグ205の位置に、人物タグ204を所持する正規人物が存在し、座標(450,150)に人物タグ204を所持しない不審物体が存在すると物体位置判断手段109で判断することができる。
【0075】
ここで、定常時に検出可能な位置タグ205の全てが検出されているにも関わらず、人物タグ204が検出されてしまったとする。これは、タグリーダ101から出力される電波の強度が高く、位置タグ205の上に人203が存在しても、位置タグ205が検出できてしまったことが考えられる。このような状況を未検出位置タグ判断手段106が検出した場合、部屋201に配置した何れかの位置タグ205が検出されなくなるまで、タグリーダ101の電波の出力を弱めるように、未検出位置タグ判断手段106から観測範囲制御手段103に電波の出力値の調整要請を出力しても良い。すなわち、定常時に検出可能な位置タグ205全てが検出されているにも関わらず、人物タグ204が検出されてしまった場合、未検出位置タグ判断手段106が、観測範囲制御手段1301に対して電波強度を弱めるように指示を出す。観測範囲制御手段1301を介して出力調整部101Pで電波強度を弱めた後、再度、タグリーダ101で位置タグ205の検出を行い、部屋201に配置した何れかの位置タグ205が検出されなくなると未検出位置タグ判断手段106で判断するまで、前記処理を繰り返す。電波の出力を弱め始めて、初めて検出されなくなった位置タグ205の位置に、人203が存在すると未検出位置タグ判断手段106で判断できる。
【0076】
また、観測範囲制御手段1301を介して出力調整部101Pでタグリーダ101の電波の出力を弱めると、タグリーダ101の観測範囲が狭くなってしまう場合、人203が上に存在していても検出されてしまう位置タグ205を、更に電波の届きにくい床下へと埋めてしまっても構わない。尚、本作業は、本システムを導入する際に、事前実験により位置タグの検出状況を評価し、前記評価結果に基づき位置タグを埋め込む位置を決定する必要がある。
【0077】
他の手段として、タグリーダ101とは別のサブタグリーダを併設することにより、タグリーダ101からでは電波の強度が強く、人203が上に存在していても検出されてしまう位置タグ205は、前記サブタグリーダでの検出を行わせることも考えられる。
【0078】
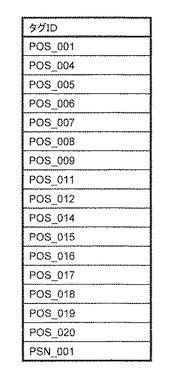
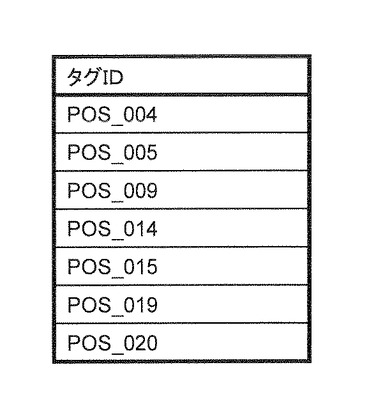
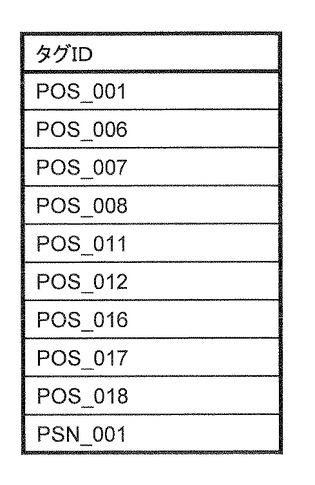
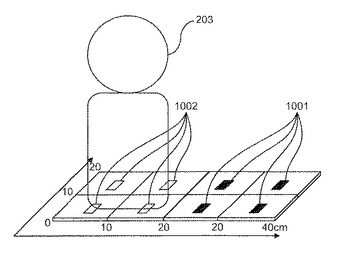
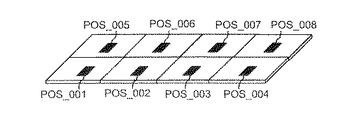
尚、図2、図9、図11、及び、図12で示した例では、説明を簡単にするために位置タグの配置を、一例として、100cm間隔で行っていたが、人203の位置を詳細に検出したい場合には、位置タグを配置する間隔を小さくすることが考えられる。図15Aに、部屋201内に配置する位置タグ205の間隔を小さくした例を示す。位置タグ205の間隔を小さくすると、人203が上に存在したときに検出できなくなる位置タグ205の枚数が増える可能性がある。図15Aに示した例の場合、未検出であった未検出タグ1002の枚数は4枚となっている。このときの人203の存在する位置は、未検出位置タグ判断手段106において、例えば、未検出タグ1002の重心位置とすることができる。図15Aに示した例の場合、人203の存在する位置は、座標(10,10)となる。
【0079】
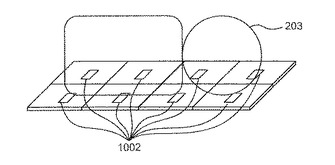
また、人203が上に存在しているときに検出できなくなる位置タグ205の枚数を予め把握しておき、前記枚数よりも多くの位置タグ205が検出できなくなった場合、人203が倒れたと未検出位置タグ判断手段106で判断することも可能である。図15Bに、人203が倒れたときに検出できなくなった位置タグ205である未検出タグ1002と、倒れた人203の様子を示す。図16A及び図16Bに、人203の転倒を判断可能とした構成図を示す。
【0080】
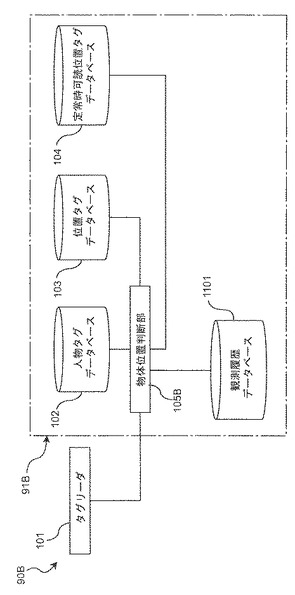
図16A及び図16Bは、人203の転倒を判断可能とする物体位置推定システム90Bの構成及び物体位置推定装置91Bの構成を示す図である。物体位置推定システム90Bは、タグリーダ101と、物体位置推定装置91Bとで構成されている。物体位置推定装置91Bは、人物タグデータベース102と、位置タグデータベース103と、定常時可読位置タグデータベース104と、物体位置推定部105Bと、観測履歴データベース1101とを備えるように構成されている。物体位置推定部105Bは、図16Bに示すように、未検出位置タグ判断手段(未検出位置タグ判断部)106と、未検出位置タグ位置判断手段(未検出位置タグ位置判断部)107と、人物タグ判断手段(人物タグ判断部)108と、物体位置判断手段(物体位置判断部)109と、転倒判断手段(転倒判断部)1102とを備えるように構成されている。尚、観測履歴データベース1101、および、転倒判断手段1102以外の各手段、および、データベースは、先の実施形態で説明済みのため、ここでの説明は省略する。
【0081】
観測履歴データベース1101には、物体位置推定部105Bを介して、定常時可読位置タグデータベース104に検出可能と記録されている位置タグ205の中で、検出されなかった位置タグ205のタグIDと、タグリーダ101が観測を行った時刻とが記録されている。尚、図15Cに、各位置タグ205に対応するタグIDを示す。
【0082】
転倒判断手段1102は、観測履歴データベース1101を参照することによって、前回の観測において検出されなかった位置タグ205の個数と、そのときの観測において検出されなかった位置タグ205の個数を比較し、検出されなかった位置タグ205の個数が所定の閾値を越えて増加していた場合、人203が転倒したと判断する。転倒判断手段1102の判断結果は、未検出位置タグ位置判断手段107に出力する。前記閾値は、例えば人203の立っているときと、倒れたときの、床の遮蔽面積の差に基づいて決定しても良い。人203が倒れると、人203により遮蔽される床面積が広くなるため、人203が立っているときと比較し、検出できなくなる位置タグ205の枚数が多くなる。つまり、位置タグ205を敷き詰める間隔に基づいて、人203が立っているときに遮蔽される面積に含まれる位置タグ205の個数から、人203が倒れたときに遮蔽される面積に含まれる位置タグ205の個数に増加したときに、人203が転倒していると転倒判断手段1102で判断する。
【0083】
図17に、人203の転倒を判断するときのフローチャートを示す。
【0084】
ステップS301、および、ステップS302の処理は、第1実施形態にて説明した内容と同じである。ここで、ステップS302の処理において、定常時可読位置タグデータベース104に検出可能と記録されている位置タグ205の中で検出されなかった位置タグ205が存在すると物体位置推定部105Bで判断されたとする。このとき、ステップS1201に進む。検出されなかった位置タグ205が存在しないと物体位置推定部105Bで判断されたときは、ステップS301に戻る。
【0085】
ステップS1201の処理において、未検出位置タグ位置判断手段107は、検出されなかった位置タグ205のタグIDの情報を、タグ101の観測時刻と共に、観測履歴データベース1101に記録する。
【0086】
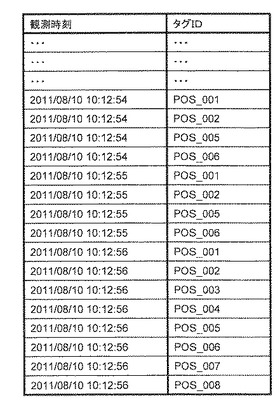
次いで、ステップS1202の処理において、転倒判断手段1102は、観測履歴データベース1101を参照することによって、前回の観測において検出されなかった位置タグ205の個数と、そのときの観測において検出されなかった位置タグ205の個数を比較し、検出されなかった位置タグ205の個数が所定の閾値を越えて増加していたか否かを判断する。検出されなかった位置タグ205の個数が所定の閾値を超えていなかったと転倒判断手段1102で判断した場合は、ステップS301へ戻り、検出されなかった位置タグ205の個数が所定の閾値を超えていたと転倒判断手段1102で判断した場合は、ステップS1203へ進む。ここで、図18に、観測履歴データベース1101の一例を示す。図18の例では、時刻2011/08/10 10:12:55に至るまで、POS_001, POS_002, POS_005, POS_006の4個の位置タグ205が検出されていない。そして、時刻2011/08/10 10:12:56において、POS_001, POS_002, POS_003, POS_004, POS_005, POS_006, POS_007, POS_008の8個の位置タグ205が検出されなくなっている。転倒判断手段1102での閾値が4と設定されていた場合、前記ケースにおいては、検出されなかった位置タグ205の個数が所定の閾値である4を超えていると転倒判断手段1102で判断して、ステップS1203へ進むこととなる。
【0087】
ステップS1203の処理において、転倒判断手段1102は、観測履歴データベース1101に記録されている、検出されなかった位置タグ205の位置に、人203が転倒していると判断する。人203の転倒判断後、スピーカーなどの報知装置93を用いて、周囲に対して人203の転倒を知らせるなどしても良い。
【0088】
以上のような処理を行うことによって、センサ(観測装置)にタグリーダ101のみを用いた構成であっても、タグ204を所持する人物203Aと、タグ所持しない不審人物203Bとを区別しながら、各人物の位置情報を検出することができる。さらに、位置タグ205の検出個数の変化から人物の転倒を察知し、報知することが可能となる。
【0089】
なお、前記様々な実施形態又は変型例のうちの任意の実施形態又は変型例を適宜組み合わせることにより、それぞれの有する効果を奏するようにすることができる。
【産業上の利用可能性】
【0090】
本発明に係る物体位置推定システム、物体位置推定方法、及び物体位置推定プログラムは、観測装置としてタグリーダのみを用いた構成により、タグ所持者の検出のみならず、タグを所持しない不審物体の検出を行うことができる。よって、進入者に予めタグを付与しておくことが困難な店舗内での顧客の動線管理又は、オフィスなどにおける不審者の検出などに関して特に有用である。
【符号の説明】
【0091】
90,90A,90B 物体位置推定システム
91,91A,91B 物体位置推定装置
93 報知装置
101 タグリーダ
101P 出力調整部(出力調整装置)
102 人物タグデータベース
103 位置タグデータベース
104 定常時可読位置タグデータベース
105,105A 物体位置推定手段(物体位置推定部)
106 未検出位置タグ判断手段(未検出位置タグ判断部)
107 未検出位置タグ位置判断手段(未検出位置タグ位置判断部)
108 人物タグ判断手段(人物タグ判断部)
109 物体位置判断手段(物体位置判断部)
201,201A 部屋
202 棚
203 人
203A 人
203B 人
204 人物タグ
205 位置タグ
205A 位置タグ
205B 位置タグ
205C 位置タグ
801 電動雲台
801M 姿勢調整用モータ
1002 未検出タグ
1302 再検出処理判断手段
1601,1601A 可動レール
1601M 可動部
1701 入口
1702 出口
1703 経路
【技術分野】
【0001】
本発明は、タグリーダの観測範囲内に存在する人物の位置を判断する物体位置推定システム、物体位置推定方法、及び物体位置推定プログラムに関する。
【背景技術】
【0002】
従来、物体の位置を検出する技術として、タグリーダ(RFID測位装置)とカメラ(防犯カメラ)との測位データをそれぞれ比較(重ね合わせ)し、タグリーダとカメラとの両測位データが揃っている箇所には、タグを所持した人物が存在し、カメラの測位データしか無い箇所には、タグを所持していない不審者がいる、と判断しているものがあった(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−311111号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1で使用されているカメラは、環境条件の変化(照明条件など)に弱いという特徴があり、夜間又は煙が立ち込めている災害時などにも安定した運用を行うことは困難であると考える。前記条件においてはタグリーダのみを用いることも可能であるが、このとき、タグを所持していない不審者の検出ができなくなる。また、観測装置にカメラを用いると、人は「監視されている」という意識を持つため、例えば、家庭内等の一般環境への普及の困難であると考える。
【0005】
そこで、本発明は、前記課題を解決するもので、観測装置としてタグリーダのみを用いる構成により、タグ所持者の検出のみならず、タグが付与されていない不審物体、および、タグを所持していない不審者の検出をロバストに行うことのできる物体位置推定システム、物体位置推定方法、及び、物体位置推定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
前記目的を達成するために、本発明は以下のように構成する。
【0007】
本発明の1つの態様によれば、人の出入りする環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDを読み取るタグリーダと、
前記環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、
前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、
前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースと、
前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると判断する物体位置推定部と、
を備える物体位置推定システムを提供する。
【0008】
本発明の別の態様によれば、人の出入りする環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDをタグリーダで読み取ったのち、
前記環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースとを使用して、
前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると物体位置推定部で判断する、
物体位置推定方法を提供する。
【0009】
本発明のさらに別の態様によれば、コンピュータに、
人の出入りする環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、
前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、
前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースと、
前記環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDをタグリーダで読み取ったのち、前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると判断する物体位置推定部の機能を実現させるための物体位置推定プログラムを提供する。
【発明の効果】
【0010】
本発明の物体位置推定システム、物体位置推定方法、及び、物体位置推定プログラムによれば、観測装置としてタグリーダのみを用いた構成により、タグ所持者の検出のみならず、タグを所持しない不審物体の検出を行うことができる。
【図面の簡単な説明】
【0011】
【図1A】本発明の第1実施形態に係る物体位置推定システムの構成を示すブロック図
【図1B】本発明の第1実施形態に係る物体位置推定システムの構成の物体位置判断部を示すブロック図
【図2】本発明の第1実施形態に係る物体位置推定システムでの観測対象が存在する環境の一例である生活空間としての部屋における観測状況を説明する図
【図3】本発明の第1実施形態に係る物体位置推定システムの処理を示すフローチャート
【図4】本発明の第1実施形態に係る物体位置推定システムのタグリーダの観測データの一例を示す図
【図5】本発明の第1実施形態に係る物体位置推定システムの人物タグデータベースの一例を示す図
【図6】本発明の第1実施形態に係る物体位置推定システムの位置タグデータベースの一例を示す図
【図7】本発明の第1実施形態に係る物体位置推定システムの定常時可読位置タグデータベースの一例を示す図
【図8A】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの構成を示すブロック図。
【図8B】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの物体位置判断部の構成を示すブロック図。
【図9】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムでの観測対象が存在する環境の一例である生活空間としての部屋における観測状況を説明する図
【図10A】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの定常時可読位置タグデータベースの一例(電動雲台を使用する場合の例)を示す図
【図10B】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの定常時可読位置タグデータベースの一例(電動雲台を使用する場合の例)を示す図
【図10C】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの定常時可読位置タグデータベースの一例(可動レールを使用する場合の例)を示す図
【図10D】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの定常時可読位置タグデータベースの一例(可動レールを使用する場合の例)を示す図
【図10E】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの定常時可読位置タグデータベースの一例(電波強度を調整する場合の例)を示す図
【図10F】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの定常時可読位置タグデータベースの一例(電波強度を調整する場合の例)を示す図
【図11】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムでの観測対象が存在する環境である生活空間としての部屋における観測状況を説明する図
【図12】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムでの観測対象が存在する環境である作業環境としての部屋における観測状況を説明する図
【図13】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムの処理を示すフローチャート
【図14A】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムのタグリーダの観測データの一例を示す図
【図14B】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムのタグリーダの観測データ(電動雲台をX軸方向に45°回転させたときのタグリーダの観測データ)の一例を示す図
【図14C】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムのタグリーダの観測データ(電動雲台をX軸方向に−30°回転させたときのタグリーダの観測データ)の一例を示す図
【図15A】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムにおいて、部屋内に配置する位置タグの間隔を小さくした例を示す図
【図15B】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムにおいて、人が倒れたときに検出できなくなった位置タグである未検出タグと、倒れた人の様子を示す図
【図15C】本発明の第2実施形態に係る複数人物の位置を検出可能な物体位置推定システムにおいて、各位置タグに対応するタグIDを示す図
【図16A】本発明の第2実施形態に係る人の転倒を判断可能な物体位置推定システムの構成を示すブロック図
【図16B】本発明の第2実施形態に係る人の転倒を判断可能な物体位置推定システムの物体位置判断部の構成を示すブロック図の構成を示す図。
【図17】本発明の第2実施形態に係る人の転倒を判断可能な物体位置推定システムの処理を示すフローチャート
【図18】本発明の第2実施形態に係る人の転倒を判断可能な物体位置推定システムの観測履歴データベースの一例を示す図
【発明を実施するための形態】
【0012】
以下に、本発明にかかる実施の形態を図面に基づいて詳細に説明する。
【0013】
以下、図面を参照して本発明における実施形態を詳細に説明する前に、本発明の種々の態様について説明する。
【0014】
本発明の第1態様によれば、人の出入りする環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDを読み取るタグリーダと、
前記環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、
前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、
前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースと、
前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると判断する物体位置推定部と、
を備える物体位置推定システムを提供する。
【0015】
本発明の第2態様によれば、前記物体位置推定部は、
前記定常時可読位置タグデータベースに記録されている位置タグの中で、前記タグリーダでは検出できなかった位置タグが存在するか否かを判断する未検出位置タグ判断部と、
前記タグリーダでは検出できなかった位置タグの配置されている位置を、前記位置タグデータベースを参照することにより判断する未検出位置タグ位置判断部と、
前記人物タグデータベースに記録されている人物タグの中で、前記タグリーダで検出された人物タグが存在するか否かを判断する人物タグ判断部と、
前記人物タグが存在していた場合、前記タグリーダでは検出できなかった位置タグの位置に、前記人物タグを所持する人物が存在すると判断し、前記人物タグが存在していなかった場合、前記タグリーダでは検出できなかった位置タグの位置に、前記人物タグを所持していない人物が存在すると判断する物体位置判断部と、
をさらに備える第1の態様に記載の物体位置推定システムを提供する。
【0016】
本発明の第3態様によれば、前記定常時可読位置タグデータベースには、前記タグリーダの姿勢、位置、又は、電波強度毎に、前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグの識別IDとが分別して記録されており、
前記未検出位置タグ判断手段の判断結果に基づき、定常時において検出されるべき位置タグの中で検出されなかった位置タグが複数存在した場合、どの位置タグの位置に、人物タグを所持した人、もしくは、人物タグを所持しない人が存在するのかを判断するため、前記検出されなかった位置タグの再検出処理の順序を決定する再検出処理判断手段と、
前記再検出処理判断手段で決定された再検出処理の順序に基づき、前記検出されなかった位置タグを切り分けて、個別に検出可能となるような前記タグリーダの姿勢、位置、又は、電波強度を前記定常時可読位置タグデータベースに基づいて判断し、前記判断結果を、前記タグリーダの観測範囲を変更する観測範囲制御部と、
前記観測範囲制御部からの前記観測範囲の変更制御により、前記タグリーダの姿勢、位置、又は、電波強度を変更するタグリーダ調整装置とを備える、第2の態様に記載の物体位置推定システムを提供する。
【0017】
本発明の第4態様によれば、前記タグリーダ調整装置は、前記位置タグの上に前記人が存在したときに、前記位置タグが検出されなくなると前記未検出位置タグ判断部で判断したとき、前記タグリーダの電波の出力強度を調整する出力調整部である、第3の態様に記載の物体位置推定システムを提供する。
【0018】
本発明の第5態様によれば、前記出力調整部は、前記人物タグが検出されたとき、前記定常時可読位置タグデータベースに検出可能と記録されている識別IDを持つ位置タグが全て検出されていた場合には、前記位置タグの中の何れかの位置タグが検出されなくなると前記未検出位置タグ位置判断部で判断するまで、前記タグリーダの電波の出力強度を少しずつ弱めていく、第4の態様に記載の物体位置推定システムを提供する。
【0019】
本発明の第6態様によれば、検出した前記人の位置の履歴を記録しておく観測履歴データベースと、
前記人が一人で存在したときに、検出できなくなる位置タグの枚数を基に前記人が一人で存在すると判断される状況において、前記枚数よりも多くの枚数の位置タグが検出されなかった場合、前記人が倒れている可能性があると判断する転倒判断部とをさらに備える、
第1から第5の何れか1つの態様に記載の物体位置推定システムを提供する。
【0020】
本発明の第7態様によれば、人の出入りする環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDをタグリーダで読み取ったのち、
前記環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースとを使用して、
前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると物体位置推定部で判断する、
物体位置推定方法を提供する。
【0021】
本発明の第8態様によれば、コンピュータに、
人の出入りする環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、
前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、
前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースと、
前記環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDをタグリーダで読み取ったのち、前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると判断する物体位置推定部の機能を実現させるための物体位置推定プログラムを提供する。
【0022】
以下、本発明の実施の形態について、図面を参照しながら説明する。
【0023】
(第1実施形態)
本発明の第1実施形態では、人が出入り可能でかつ閉じた環境の一例である部屋に対して、天井にタグリーダを設置し、床に位置情報を記録させた位置タグを配置することによって、部屋に出入りする人が、人物IDを示す人物タグを所持しているか否かを判別した上で、人の位置を検出している。
【0024】
図1A及び図1Bは、本発明の第1実施形態に係る物体位置推定システムの構成及び物体位置判断部の構成を示す図である。
【0025】
本発明の第1実施形態に係る物体位置推定システム90は、タグリーダ101と、物体位置推定装置91とで構成されている。物体位置推定装置91は、人物タグデータベース102と、位置タグデータベース103と、定常時可読位置タグデータベース104と、物体位置推定部105とを備えるように構成されている。
【0026】
タグリーダ101は、所定の観測周期(例えば100msなど)毎に、部屋201内の観測エリア内を観測し、位置情報が記録されたタグ(位置タグ)と、人203が所持するタグ(人物タグ)の検出を行う。
【0027】
人物タグデータベース102には、人203を示す人物IDと、当該人203が所持するタグID(タグ固有の識別ID)とが紐付けされて記録されている。
【0028】
位置タグデータベース103には、部屋201の例えば床面の多数の位置タグ205(205A〜205Cなど)が配置されている位置情報と、それぞれの位置タグ205のタグID(タグ固有の識別ID)とが紐付けされて記録されている。
【0029】
定常時可読位置タグデータベース104には、人が部屋201内に存在しない状況(定常時)において、前記位置タグ205の中で検出できる位置タグ205と検出できない位置タグ205のタグIDが分別して記録されている。
【0030】
物体位置推定部105は、タグリーダ101が、定常時可読位置タグデータベース104に検出可能と記録されている位置タグ205を検出しなかったときに、人物タグデータベース102に記録されている人物タグ204が検出されているか否かを確認し、人物タグ204が検出されていないときには、前記位置タグ205の位置に不審物体が存在すると判断し、人物タグ204が検出されているときには、前記位置タグ205の位置には、前記人物タグ204に記録された人物IDが示す人203が存在すると判断する。
【0031】
図2に、本発明の第一実施形態に係る物体位置推定システムの構成要素であるタグリーダ101を備えた、環境の一例である部屋201を示す。部屋201の四角形の天井の中央付近には、真下に向けられたタグリーダ101が設置されているが、部屋201の床に配置されたタグ205を検出できるのであれば、タグリーダ101を壁又は天井の隅に配置しても構わない。部屋201内には、人物タグ204を所持した人203が出入り可能であり、図2の状態では、人203が部屋201内に存在していると仮定する。部屋201の床には、位置情報を記録した位置タグ205(205A,205B,205C,・・)が多数個配置されている。尚、前記位置タグ205には、個々に配置されている部屋201中の位置情報が記録されているものとし、任意の一つの位置タグを示す場合には、この任意のタグをタグ205として説明を行う。そして、部屋201内には、家具としての棚202が設置され、棚202により一部のタグ205(例えば、205B,205C)が覆われている。
【0032】
以下、図3のフローチャートに対応させながら、各構成要素について説明する。尚、図3は、前記物体位置推定システムの全体処理を示すフローチャートである。各ステップの処理を説明しながら、関連する構成についても説明する。
【0033】
<タグリーダの説明>
まず、ステップS301の処理において、タグリーダ101は、所定の観測周期(例えば100msなど)毎に、部屋201内を観測し、部屋201内に存在する人203の所持する人物タグ204の検出と、部屋201に配置されている位置タグ205の検出とを行う。図4に、図2に示された部屋201内を、タグリーダ101で観測したときの観測データの一例を示す。タグリーダ101で観測したときの観測データは、タグリーダ101の内部記憶部又は物体位置推定部105の内部記憶部などで記録しておく。図4に示す観測データには、人物タグID:PSN_001が示す人物タグ204と、位置タグID:POS_002, POS_003, POS_013が示す位置タグ205以外の全ての位置タグ205が検出されている。
【0034】
<人物タグ、および、人物タグデータベース102の説明>
人物タグ204とは、部屋201内に進入することが許可されている人203に付与されるタグであり、人物タグデータベース102には、人203を示す人物IDと人203が所持するタグIDとが紐付けて記録されている。尚、前記人物IDは、前記人物タグ204の内部記憶に記録しておいても良い。図5に人物タグデータベース102の一例を示す。図5の人物タグデータベース102には、人物タグ204毎に固有に割り当てられるタグID(人物タグID)と、人203を示す人物ID(例えば、人物の名前)とが記録されている。例えば、人物タグID:PSN_001が記録されている人物タグ204は、山田太郎という人物が所持している人物タグ204であることを示す。尚、人物IDには、名前以外に管理番号などを用いても良い(会社であれば社員番号など)。
【0035】
<位置タグ、および、位置タグデータベース103の説明>
位置タグ205とは、部屋201内の床に配置されているタグであり、位置タグデータベース103には、位置タグ205のタグIDと、位置タグ205が配置されている位置情報とが紐付けて記録されている。尚、前記位置情報は、前記位置タグ205の内部記憶に記録しておいても良い。図6に位置タグデータベース103の一例を示す。図6の位置タグデータベース103には、位置タグ205毎に固有に割り当てられるタグID(位置タグID)と、位置タグ205が配置されている位置の情報(例えば位置座標)とが記録されている。例えば、位置タグID:POS_001が示す位置タグ205は、部屋201内における座標(50,50)の位置の配置されていることを示す。
【0036】
ステップS301に次いで、ステップS302の処理において、物体位置推定部105は、定常時可読位置タグデータベース104に検出可能と記録されている位置タグ205が全て検出されているか否かを判断する。位置タグ205が全て検出されていたと物体位置推定部105が判断する場合はステップS301の処理に戻り、位置タグ205が全て検出されていなかったと物体位置推定部105が判断する場合はステップS303の処理に進む。
【0037】
図7の定常時可読位置タグデータベース104を参照すると、定常時には位置タグID:POS_013が示す位置タグ205が検出可能であるのに対し、図4の観測データには前記位置タグID:POS_013が示す位置タグ205が検出されておらず、この図4のケースにおいては、ステップS303の処理に進むこととなる。前記位置タグ205が検出されなかった理由としては、タグリーダ101と前記位置タグ205の間に存在する人203の保有する水分により、タグリーダ101の出力する電波が減衰され、前記位置タグ205まで前記電波が到達できなかったためと考えられる。
【0038】
<定常時可読位置タグデータベースの説明>
定常時可読位置タグデータベース104には、定常時(人が部屋201内に存在しない状況)において、検出可能な位置タグ205と、検出不可能な位置タグ205とが分別して記録されている。定常時位置タグデータベース104は、定常時(人203が存在していない状況)において、タグリーダ101を動作させ、各位置タグ205の検出可否を予め記録させておくものである。つまり、家具等の障害物の影響で検出されない位置タグ205、又は、位置タグ205自体が故障してしまっているため検出されない位置タグ205は、検出不可能な位置タグ205として分別されて、定常時可読位置タグデータベース104に記録されている。図7に定常時可読位置タグデータベース104の一例を示す。図7の定常時可読位置タグデータベース104には、位置タグ205のタグIDと、定常時における位置タグ205の可読判定(すなわち、「可」又は「不可」)とが記録されている。例えば、位置タグID:POS_001が示す位置タグ205Aは、「可」と記録されて、定常時に検出が可能であることを示し、位置タグID:POS_002が示す位置タグ205Bは、「不可」と記録されて、定常時でも検出が不可能であることを示している。これは、位置タグ205Bの配置されている位置(座標(150,50))に、棚202が設置されているためであり、タグリーダ101から出力される電波が位置タグ205Bまで届かないためである。
【0039】
ステップS303の処理において、物体位置推定部105は、人物タグデータベース102に記録されている人物タグ204が検出されているか否かを判断する。人物タグ204が検出されていたと物体位置推定部105が判断した場合はステップS304の処理に進み、人物タグ204が検出されていなかったと物体位置推定部105が判断した場合はステップS305の処理に進む。図4の観測データには、人物タグID:PSN_001が示す人物タグ204が検出されているため、この図4のケースにおいては、ステップS304の処理に進むこととなる。
【0040】
ステップS304の処理において、物体位置推定部105は、ステップS302の処理において検出されなかった位置タグ205の配置位置を、位置タグデータベース103を参照することにより取得し、更に、ステップS303の処理において検出された人物タグ204を所持する人203を、人物タグデータベース102を参照することにより物体位置推定部105で取得し、前記配置位置に、人物タグIDが示す人203が存在すると物体位置推定部105で判断する。その後、ステップS301に戻る。
【0041】
ステップS302の処理において検出されなかった位置タグ205(位置タグID:POS_013)の配置位置は、図6の位置タグデータベース103を参照することにより、座標(250,250)であることが物体位置推定部105で分かる。更に、ステップS303の処理において検出された人物タグ204(人物タグID:PSN_001)が示す人203は、図5の人物タグデータベース102を参照することにより、山田太郎さんであることが物体位置推定部105で分かる。
【0042】
以上から、部屋201の座標(250,250)の位置に、正規人物である山田太郎さんが存在すると物体位置推定部105で判断することができる。
【0043】
ステップS305の処理において、物体位置推定部105は、ステップS302の処理において検出されなかった位置タグ205の配置位置を、位置タグデータベース103を参照することにより取得し、前記配置位置に、人物タグ204を所持しない不審物体が存在すると物体位置推定部105で判断する。例えば、図2の人203が人物タグ204を所持していなかったとする。すると、ステップS302の処理において検出されなかった位置タグ205(位置タグID:POS_013)の配置位置は、図6の位置タグデータベース103を参照することにより座標(250,250)であることが物体位置推定部105で分かる。更に、ステップS303の処理において人物タグ204が検出されていないことが物体位置推定部105で分かる。その後、ステップS301に戻る。
【0044】
以上の図3の処理から、部屋201の座標(250,250)の位置に、不審者、あるいは、不審物体が存在すると物体位置推定部105で判断することができる。
【0045】
ここで、物体位置推定部105の詳細な動作について説明する。
【0046】
物体位置推定部105は、図1Bに示すように、未検出位置タグ判断手段(未検出位置タグ判断部)106と、未検出位置タグ位置判断手段(未検出位置タグ位置判断部)107と、人物タグ判断手段(人物タグ判断部)108と、物体位置判断手段(物体位置判断部)109とを備えて構成されている。
【0047】
未検出位置タグ判断手段106は、タグリーダ101のタグIDの検出結果と、定常時可読位置タグデータベース104を参照し、定常時可読位置タグデータベース104の可読判定に「可」と記録されている位置タグ205のタグIDの中から、タグリーダ101が検出したタグID以外のタグIDを抽出し、抽出したタグIDを持つ位置タグ205をタグリーダ101で検出できなかった位置タグ205であると判断する。未検出位置タグ判断手段106の判断結果は、未検出位置タグ位置判断手段107に出力する。
【0048】
以下、未検出位置タグ位置判断手段107と、人物タグ判断手段108と、物体位置判断手段109との説明は、タグリーダ101で検出できなかった位置タグ205は1個であった場合を例として説明する。尚、タグリーダ101で検出できなかった位置タグ205が2個以上であった場合に関しては後述する。
【0049】
未検出位置タグ位置判断手段107は、位置タグデータベース103に記録されている、タグIDに紐付けられた位置タグ205の配置座標を参照することにより、タグリーダ101で検出できなかった位置タグ205が配置されている座標を判断する。未検出位置タグ位置判断手段107の判断結果は、物体位置判断手段109に出力する。
【0050】
人物タグ判断手段108は、タグリーダ101のタグIDの検出結果と、人物タグデータベース102を参照し、人物タグデータベース102に記録されている人物タグ204のタグIDの中から、タグリーダ101が検出したタグIDを抽出し、抽出したタグIDを持つ人物タグ204を、タグリーダ101で検出した人物タグ204であると判断する。人物タグ判断手段108の判断結果は、物体位置判断手段109に出力する。
【0051】
物体位置判断手段109は、タグリーダ101で検出された人物タグ204が存在した場合、タグリーダ101で検出できなかった位置タグ205が配置されている座標に、タグリーダ101で検出された人物タグ204を所持する人物が存在すると判断し、タグリーダ101で検出された人物タグ204が存在しなかった場合、タグリーダ101で検出できなかった位置タグ205が配置されている座標に、人物タグ204を所持しない人物(不審物体)が存在すると判断する。
【0052】
このようにして、第1実施形態によれば、観測装置としてタグリーダ101のみを用いた構成により、タグ所持者の検出のみならず、タグを所持しない不審物体の検出を行うことができる。
【0053】
(第2実施形態)
タグリーダ101としてUHF帯のタグリーダを使用したとする。一般的に、UHF帯のタグリーダは、検出したタグの位置を知ることができない(前記タグリーダの観測範囲内に前記タグが存在するか否かのみを判断することが可能)。そのため、複数の位置タグ205と人物タグ204とが検出された場合、どの人203が、どの位置タグ205の位置に存在するかを推定することができなかった。どの人203が、どの位置タグ205の位置に存在するかを推定するためには、前記タグリーダの観測範囲を可変にする(観測範囲を移動させる、観測範囲を狭くするなど)などの処理を行う必要がある。
【0054】
本発明の第2実施形態では、閉じた環境の一例である部屋201に対して、天井にタグリーダ101を設置し、床に位置情報を記録させた位置タグ205を配置することによって、人が人物IDを示す人物タグ204を所持しているか否かを判別した上で、複数の人203A,203Bの位置を検出している。
【0055】
図8A及び図8Bは、本発明の第2実施形態に係る物体位置推定装置の構成を示す図である。
【0056】
本発明の第2実施形態に係る物体位置推定システム90Aは、タグリーダ101と、物体位置推定装置91Aとで構成されている。物体位置推定装置91Aは、人物タグデータベース102と、位置タグデータベース103と、定常時可読位置タグデータベース104と、物体位置推定部105Aと、観測範囲制御手段(観測範囲制御部)1301とを備えるように構成されている。物体位置推定部105Aは、図8Bに示すように、未検出位置タグ判断手段(未検出位置タグ判断部)106と、再検出処理判断手段(再検出処理判断部)1302と、未検出位置タグ位置判断手段(未検出位置タグ位置判断部)107と、人物タグ判断手段(人物タグ判断部)108と、物体位置判断手段(物体位置判断部)109とを備えるように構成されている。尚、観測範囲制御手段1301、および、再検出処理判断手段1302以外の各手段、および、データベースは第1実施形態で説明済みのため、ここでの説明は省略する。
【0057】
観測範囲制御手段1301は、タグリーダ101の観測範囲を変更するための手段であり、その具体的な方法として、タグリーダ101が装着された電動雲台の姿勢(回転範囲)、タグリーダ101が装着された可動部の可動レール上での移動範囲、又は、タグリーダ101に供給される電波強度の変更などが考えられる。
【0058】
電動雲台を用いる場合、図9に、電動雲台801にタグリーダ101を装着させた部屋201の例を示す。電動雲台801は、タグリーダ調整装置の一例として、タグリーダ101を回転させる姿勢調整用モータ801Mを備え、姿勢調整用モータ801Mは観測範囲制御手段1301で制御される。姿勢調整用モータ801Mの駆動により電動雲台の姿勢(回転範囲)を制御すると、電動雲台801に装着されたタグリーダ101の向きを変化させることになり、タグリーダ101のアンテナから出力される電波の方向を変化させることができる。また、図10A及び図10Bに、電動雲台801の姿勢に応じたタグリーダ101の観測範囲を記録した定常時可読位置タグデータベース104の例をそれぞれ示す。図10Aが示す定常時可読位置タグデータベース104には、定常時に、電動雲台801を姿勢調整用モータ801Mの駆動によりX座標方向に45°回転させたときに取得可能な位置タグ205が記録されている。また、図10Bが示す定常時可読位置タグデータベース104には、定常時に、電動雲台801を姿勢調整用モータ801Mの駆動によりX座標方向に−30°回転させたときに取得可能な位置タグ205が記録されている。図10A及び図10Bでは、X方向に関する回転角のみが示されているが、姿勢調整用モータ801Mの駆動により、Y方向の回転角、もしくは、X方向とY方向の組み合わせの回転角に応じて観測範囲を記録しておいても良い。
【0059】
一方、可動レールを用いる場合、タグリーダ101を装着した可動部を可動レールに沿って移動させることにより、タグリーダ101の観測範囲を変更させることができる。図11に、可動レール1601に沿って、タグリーダ101を装着した可動部1601Mを進退移動させる部屋201の例を示す。可動部1601Mには、タグリーダ調整装置の一例としてのモータなどの可動部移動用駆動装置1601Dが備えられ、駆動装置1601Dは観測範囲制御手段1301で制御される。また、図10C及び図10Dに、タグリーダ101の中心部の可動レール1601上の位置に応じたタグリーダ101の観測範囲を記録した定常時可読位置タグデータベース104の例を示す。図10Cが示す定常時可読位置タグデータベース104には、定常時に、タグリーダ101の中心部が可動レール1601のX座標50cmの位置に存在するときに取得可能な位置タグ205が記録されている。また、図10Dが示す定常時可読位置タグデータベース104には、定常時に、タグリーダ101の中心部が可動レール1601のX座標350cmの位置に存在するときに取得可能な位置タグ205が記録されている。図10C及び図10Dでは、可動レール1601を部屋201のX座標方向に沿って配置しているが、部屋201のレイアウトに応じて自由に可動レール1601を配置しても良い。例えば、美術館又は工場において人203の移動可能な経路、又は、移動経路が予め決定している場合、前記経路に沿って可動レール1601Aを装着しておいても良い。図12に移動可能な経路が予め設定されている部屋201Aの例を示す。図12の例では、部屋201Aの入口1701から出口1702に至るまでの経路1703上の天井に可動レール1601Aを装着して、可動レール1601Aに沿って、タグリーダ101を装着した可動部1601Mを進退移動させる。
【0060】
また、電波強度を変更する場合、図9に示すように、タグリーダ調整装置の一例として機能する、タグリーダ101のアンテナから出力される電波の出力調整を出力調整部(出力調整装置)101Pで行うことで、タグリーダ101の観測範囲を変更させることができる。図10E及び図10Fに、タグリーダ101のアンテナから出力される電波強度に応じたタグリーダ101の観測範囲を記録した定常時可読位置タグデータベース104の例を示す。図10Eが示す定常時可読位置タグデータベース104には、定常時に、タグリーダ101のアンテナから出力される電波の出力値を100%に出力調整部101Pで設定したときに取得可能な位置タグ205が記録されている。また、図10Fが示す定常時可読位置タグデータベース104には、定常時に、タグリーダ101のアンテナから出力される電波の出力値を50%に出力調整部101Pで設定したときに取得可能な位置タグ205が記録されている。
【0061】
再検出処理判断手段1302は、未検出位置タグ判断手段106の判断結果に基づき、定常時において検出されるべき位置タグ205の中で検出されなかった位置タグ205が複数存在した場合、どの位置タグ205の位置に、人物タグ204を所持した人203、もしくは、人物タグ204を所持しない人203が存在するのかを判断するため、前記検出されなかった位置タグ205の再検出処理の順序を決定する。そして、再検出処理判断手段1302は、前記検出されなかった位置タグ205を切り分けて、個別に検出可能となるようなタグリーダ101の姿勢又は位置、もしくは、電波強度を定常時可読位置タグデータベース104に基づいて判断し、前記判断結果(タグリーダ101の姿勢、位置、又は、電波強度の変更情報)を、タグリーダ101の観測範囲変更要請として、再検出処理判断手段1302から観測範囲手段1301に出力する。前記判断結果(タグリーダ101の姿勢、位置、又は、電波強度の変更情報)及び未検出位置タグ判断手段106の判断結果は、未検出位置タグ位置判断手段107に出力する。
【0062】
以下に、図13のフローチャートを用いて、部屋201内に複数の人物が存在する場合の処理について説明する。尚、説明は、部屋201内に2人の人203A,203Bが存在している様子を示す図9に基づいて行う。また、観測範囲制御手段1301には、電動雲台801を用いた場合について説明する。
【0063】
まず、ステップS1401の処理において、タグリーダ101は、所定の観測周期(例えば100msなど)毎に、部屋201内を観測し、部屋201内に存在する人203の所持する人物タグ204の検出と、部屋201に配置されている位置タグ205の検出とを行う。
【0064】
次いで、ステップS1402の処理において、未検出位置タグ判断手段106は、定常時可読位置タグデータベース104に検出可能と記録されている位置タグの中で、検出されていない位置タグが2個以上存在しているか否かを判断する。検出されていない位置タグが2個以上存在していると未検出位置タグ判断手段106と判断した場合はステップS1403の処理に進み、検出されていない位置タグが1個以下存在していると未検出位置タグ判断手段106と判断した場合は図3のステップS302の処理に進む。
【0065】
図9の例では、定常時に検出可能な位置タグ205の内、座標(250,250)と座標(450,150)にそれぞれ配置されている位置タグ205が検出されず、人物タグ204が一つだけ検出される状況となっている。このときのタグリーダ101の観測データを図14Aに示す。座標(250,250)に配置されている位置タグ205(POS_010)と座標(450,150)に配置されている位置タグ205(POS_013)とが検出されていないことが分かる。この場合は、検出されていない位置タグが2個以上存在していると未検出位置タグ判断手段106と判断するので、ステップS1403の処理に進む。
【0066】
ステップS1403の処理において、再検出処理判断手段1302は、検出されなかった2個の位置タグ205(POS_010とPOS_013)を個別に再検出することを判断し、再検出する順序を決定する。これは、ここまでの処理の状態では、再検出処理判断手段1302は、人物タグ204(PSN_001)を所持する人203は、座標(250,250)か(450,150)のどちらに存在するのかを判断することができないためである。再検出処理判断手段1302による順番の決定方法は、例えば、タグIDのID番号の小さい順としても良い。タグIDのID番号の小さい順に再検出を行うものとした場合、位置タグ205(POS_010)、位置タグ205(POS_013)の順に、再検出処理判断手段1302で再検出を行うこととなる。尚、タグリーダ101の観測履歴を取っていた場合には、前記観測履歴に基づいて再検出の順序を再検出処理判断手段1302で決定しても良い。例えば、前回観測時に座標(250,250)の位置タグ205のみが検出されていなかった場合、今回は、座標(450,150)に配置されている位置タグ205の再検出を初めに行うとする。つまり、未だ(個別に)観測されていない位置タグ205を優先して再検出処理を行うとしても良い。
【0067】
ステップS1404の処理において、再検出処理判断手段1302は、ステップS1403の処理で決定した順序に従い、再検出を必要とする位置タグ205の再検出を行うためのタグリーダ101の姿勢、位置、又は、電波強度などのパラメータの決定を行う。具体的には、再検出処理判断手段1302は、定常時において、そのとき再検出しようとしているi番目(iは1以上の整数。)の位置タグ205を検出可能で、且つ、その他の再検出すべき位置タグ205は検出不可となるタグリーダ101の姿勢、位置、又は、電波強度のパラメータを決定する。例えば、タグIDがPOS_010の位置タグ205の再検出を行う場合、POS_010の位置タグ205が検出可能で、且つ、POS_013の位置タグ205が検出不可となる電動雲台801の傾きを、定常時可読位置タグデータベース104から再検出処理判断手段1302で求めればよい。図10Aに示した定常時可読位置タグデータベース104を見てみると、電動雲台801をX軸方向に45°回転させた場合に、POS_010の位置タグ205が検出可能で、且つ、POS_013の位置タグ205が検出不可になることが分かる。
【0068】
以上の処理によって、再検出処理判断手段1302は、タグリーダ101の観測範囲の変更パラメータを決定する。
【0069】
次いで、ステップS1405の処理において、観測範囲制御手段1301は、ステップS1404において再検出処理判断手段1302が決定したパラメータに基づいて、タグリーダ101の姿勢、位置、又は、電波強度の変更を行う。
【0070】
以上の処理を行ったうえで、ステップS301でタグリーダ101が観測を行うことにより、複数人物が部屋201に存在する状況においても、人物タグ204を所持した人203、所持しない人203がそれぞれどの位置タグ205の位置に存在するのかを判断することが可能となる。尚、このとき、ステップS302で参照する定常時可読位置タグデータベース104は、そのときのタグリーダ101の姿勢、位置、又は、電波強度のパラメータにあったものを選択するものとし、前記姿勢、位置、又は、電波強度のパラメータの情報は、観測範囲制御手段1301から受け取るものとする。
【0071】
図14Bに、電動雲台801をX軸方向に45°回転させて、POS_010の位置タグ205の再検出処理を再検出処理判断手段1302及びタグリーダ101で行ったときの観測データ例を示す。図10Aに示した、電動雲台801をX軸方向に45°回転させたときの定常時可読位置タグデータベース104を参照すると、POS_010の位置タグ205のみが検出されていないことが再検出処理判断手段1302で分かる。
【0072】
また、図14Cに、電動雲台801をX軸方向に−30°回転させてPOS_013の位置タグ205の再検出処理を再検出処理判断手段1302及びタグリーダ101で行ったときの観測データの例を示す。図10Bに示した、電動雲台801をX軸方向に−30°回転させたときの定常時可読位置タグデータベース104を参照すると、POS_013の位置タグ205が検出されておらず、更に、PSN_001の人物タグ204が検出されていることが再検出処理判断手段1302で分かる。
【0073】
以上から、POS_013の位置タグ205の位置に、PSN_001の人物タグ204を所持した人203が存在し、POS_010の位置タグ205の位置に、人物タグ204を所持しない人203が存在することが再検出処理判断手段1302で分かる。
【0074】
また、タグリーダ101の例としてUWB(Ultra Wide Band)タグリーダを使用したとすると、例えば、三点測量の原理を用いて人物タグ204の位置を決定することができる。具体的には、タグリーダ101の構成要素としての各アンテナの設置位置は、タグリーダ101の内部記憶部などに予め記憶させておく。そして、各アンテナが各アンテナ自体の設置位置を中心として、各アンテナで検出した人物タグ204までの距離を半径とした球体を物体位置判断手段109で描く。このとき、物体位置判断手段109で、各アンテナによって描かれた球面が最も多く重なり合う位置を人203が所持している人物タグ204の存在する位置とすることができる。例えば、人物タグ204が、座標(253,249)で検出されたとすると、検出された人物タグ204からの距離の近い座標(250,250)に配置されている位置タグ205の位置に、人物タグ204を所持する正規人物が存在し、座標(450,150)に人物タグ204を所持しない不審物体が存在すると物体位置判断手段109で判断することができる。
【0075】
ここで、定常時に検出可能な位置タグ205の全てが検出されているにも関わらず、人物タグ204が検出されてしまったとする。これは、タグリーダ101から出力される電波の強度が高く、位置タグ205の上に人203が存在しても、位置タグ205が検出できてしまったことが考えられる。このような状況を未検出位置タグ判断手段106が検出した場合、部屋201に配置した何れかの位置タグ205が検出されなくなるまで、タグリーダ101の電波の出力を弱めるように、未検出位置タグ判断手段106から観測範囲制御手段103に電波の出力値の調整要請を出力しても良い。すなわち、定常時に検出可能な位置タグ205全てが検出されているにも関わらず、人物タグ204が検出されてしまった場合、未検出位置タグ判断手段106が、観測範囲制御手段1301に対して電波強度を弱めるように指示を出す。観測範囲制御手段1301を介して出力調整部101Pで電波強度を弱めた後、再度、タグリーダ101で位置タグ205の検出を行い、部屋201に配置した何れかの位置タグ205が検出されなくなると未検出位置タグ判断手段106で判断するまで、前記処理を繰り返す。電波の出力を弱め始めて、初めて検出されなくなった位置タグ205の位置に、人203が存在すると未検出位置タグ判断手段106で判断できる。
【0076】
また、観測範囲制御手段1301を介して出力調整部101Pでタグリーダ101の電波の出力を弱めると、タグリーダ101の観測範囲が狭くなってしまう場合、人203が上に存在していても検出されてしまう位置タグ205を、更に電波の届きにくい床下へと埋めてしまっても構わない。尚、本作業は、本システムを導入する際に、事前実験により位置タグの検出状況を評価し、前記評価結果に基づき位置タグを埋め込む位置を決定する必要がある。
【0077】
他の手段として、タグリーダ101とは別のサブタグリーダを併設することにより、タグリーダ101からでは電波の強度が強く、人203が上に存在していても検出されてしまう位置タグ205は、前記サブタグリーダでの検出を行わせることも考えられる。
【0078】
尚、図2、図9、図11、及び、図12で示した例では、説明を簡単にするために位置タグの配置を、一例として、100cm間隔で行っていたが、人203の位置を詳細に検出したい場合には、位置タグを配置する間隔を小さくすることが考えられる。図15Aに、部屋201内に配置する位置タグ205の間隔を小さくした例を示す。位置タグ205の間隔を小さくすると、人203が上に存在したときに検出できなくなる位置タグ205の枚数が増える可能性がある。図15Aに示した例の場合、未検出であった未検出タグ1002の枚数は4枚となっている。このときの人203の存在する位置は、未検出位置タグ判断手段106において、例えば、未検出タグ1002の重心位置とすることができる。図15Aに示した例の場合、人203の存在する位置は、座標(10,10)となる。
【0079】
また、人203が上に存在しているときに検出できなくなる位置タグ205の枚数を予め把握しておき、前記枚数よりも多くの位置タグ205が検出できなくなった場合、人203が倒れたと未検出位置タグ判断手段106で判断することも可能である。図15Bに、人203が倒れたときに検出できなくなった位置タグ205である未検出タグ1002と、倒れた人203の様子を示す。図16A及び図16Bに、人203の転倒を判断可能とした構成図を示す。
【0080】
図16A及び図16Bは、人203の転倒を判断可能とする物体位置推定システム90Bの構成及び物体位置推定装置91Bの構成を示す図である。物体位置推定システム90Bは、タグリーダ101と、物体位置推定装置91Bとで構成されている。物体位置推定装置91Bは、人物タグデータベース102と、位置タグデータベース103と、定常時可読位置タグデータベース104と、物体位置推定部105Bと、観測履歴データベース1101とを備えるように構成されている。物体位置推定部105Bは、図16Bに示すように、未検出位置タグ判断手段(未検出位置タグ判断部)106と、未検出位置タグ位置判断手段(未検出位置タグ位置判断部)107と、人物タグ判断手段(人物タグ判断部)108と、物体位置判断手段(物体位置判断部)109と、転倒判断手段(転倒判断部)1102とを備えるように構成されている。尚、観測履歴データベース1101、および、転倒判断手段1102以外の各手段、および、データベースは、先の実施形態で説明済みのため、ここでの説明は省略する。
【0081】
観測履歴データベース1101には、物体位置推定部105Bを介して、定常時可読位置タグデータベース104に検出可能と記録されている位置タグ205の中で、検出されなかった位置タグ205のタグIDと、タグリーダ101が観測を行った時刻とが記録されている。尚、図15Cに、各位置タグ205に対応するタグIDを示す。
【0082】
転倒判断手段1102は、観測履歴データベース1101を参照することによって、前回の観測において検出されなかった位置タグ205の個数と、そのときの観測において検出されなかった位置タグ205の個数を比較し、検出されなかった位置タグ205の個数が所定の閾値を越えて増加していた場合、人203が転倒したと判断する。転倒判断手段1102の判断結果は、未検出位置タグ位置判断手段107に出力する。前記閾値は、例えば人203の立っているときと、倒れたときの、床の遮蔽面積の差に基づいて決定しても良い。人203が倒れると、人203により遮蔽される床面積が広くなるため、人203が立っているときと比較し、検出できなくなる位置タグ205の枚数が多くなる。つまり、位置タグ205を敷き詰める間隔に基づいて、人203が立っているときに遮蔽される面積に含まれる位置タグ205の個数から、人203が倒れたときに遮蔽される面積に含まれる位置タグ205の個数に増加したときに、人203が転倒していると転倒判断手段1102で判断する。
【0083】
図17に、人203の転倒を判断するときのフローチャートを示す。
【0084】
ステップS301、および、ステップS302の処理は、第1実施形態にて説明した内容と同じである。ここで、ステップS302の処理において、定常時可読位置タグデータベース104に検出可能と記録されている位置タグ205の中で検出されなかった位置タグ205が存在すると物体位置推定部105Bで判断されたとする。このとき、ステップS1201に進む。検出されなかった位置タグ205が存在しないと物体位置推定部105Bで判断されたときは、ステップS301に戻る。
【0085】
ステップS1201の処理において、未検出位置タグ位置判断手段107は、検出されなかった位置タグ205のタグIDの情報を、タグ101の観測時刻と共に、観測履歴データベース1101に記録する。
【0086】
次いで、ステップS1202の処理において、転倒判断手段1102は、観測履歴データベース1101を参照することによって、前回の観測において検出されなかった位置タグ205の個数と、そのときの観測において検出されなかった位置タグ205の個数を比較し、検出されなかった位置タグ205の個数が所定の閾値を越えて増加していたか否かを判断する。検出されなかった位置タグ205の個数が所定の閾値を超えていなかったと転倒判断手段1102で判断した場合は、ステップS301へ戻り、検出されなかった位置タグ205の個数が所定の閾値を超えていたと転倒判断手段1102で判断した場合は、ステップS1203へ進む。ここで、図18に、観測履歴データベース1101の一例を示す。図18の例では、時刻2011/08/10 10:12:55に至るまで、POS_001, POS_002, POS_005, POS_006の4個の位置タグ205が検出されていない。そして、時刻2011/08/10 10:12:56において、POS_001, POS_002, POS_003, POS_004, POS_005, POS_006, POS_007, POS_008の8個の位置タグ205が検出されなくなっている。転倒判断手段1102での閾値が4と設定されていた場合、前記ケースにおいては、検出されなかった位置タグ205の個数が所定の閾値である4を超えていると転倒判断手段1102で判断して、ステップS1203へ進むこととなる。
【0087】
ステップS1203の処理において、転倒判断手段1102は、観測履歴データベース1101に記録されている、検出されなかった位置タグ205の位置に、人203が転倒していると判断する。人203の転倒判断後、スピーカーなどの報知装置93を用いて、周囲に対して人203の転倒を知らせるなどしても良い。
【0088】
以上のような処理を行うことによって、センサ(観測装置)にタグリーダ101のみを用いた構成であっても、タグ204を所持する人物203Aと、タグ所持しない不審人物203Bとを区別しながら、各人物の位置情報を検出することができる。さらに、位置タグ205の検出個数の変化から人物の転倒を察知し、報知することが可能となる。
【0089】
なお、前記様々な実施形態又は変型例のうちの任意の実施形態又は変型例を適宜組み合わせることにより、それぞれの有する効果を奏するようにすることができる。
【産業上の利用可能性】
【0090】
本発明に係る物体位置推定システム、物体位置推定方法、及び物体位置推定プログラムは、観測装置としてタグリーダのみを用いた構成により、タグ所持者の検出のみならず、タグを所持しない不審物体の検出を行うことができる。よって、進入者に予めタグを付与しておくことが困難な店舗内での顧客の動線管理又は、オフィスなどにおける不審者の検出などに関して特に有用である。
【符号の説明】
【0091】
90,90A,90B 物体位置推定システム
91,91A,91B 物体位置推定装置
93 報知装置
101 タグリーダ
101P 出力調整部(出力調整装置)
102 人物タグデータベース
103 位置タグデータベース
104 定常時可読位置タグデータベース
105,105A 物体位置推定手段(物体位置推定部)
106 未検出位置タグ判断手段(未検出位置タグ判断部)
107 未検出位置タグ位置判断手段(未検出位置タグ位置判断部)
108 人物タグ判断手段(人物タグ判断部)
109 物体位置判断手段(物体位置判断部)
201,201A 部屋
202 棚
203 人
203A 人
203B 人
204 人物タグ
205 位置タグ
205A 位置タグ
205B 位置タグ
205C 位置タグ
801 電動雲台
801M 姿勢調整用モータ
1002 未検出タグ
1302 再検出処理判断手段
1601,1601A 可動レール
1601M 可動部
1701 入口
1702 出口
1703 経路
【特許請求の範囲】
【請求項1】
人の出入りする環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDを読み取るタグリーダと、
前記環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、
前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、
前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースと、
前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると判断する物体位置推定部と、
を備える物体位置推定システム。
【請求項2】
前記物体位置推定部は、
前記定常時可読位置タグデータベースに記録されている位置タグの中で、前記タグリーダでは検出できなかった位置タグが存在するか否かを判断する未検出位置タグ判断部と、
前記タグリーダでは検出できなかった位置タグの配置されている位置を、前記位置タグデータベースを参照することにより判断する未検出位置タグ位置判断部と、
前記人物タグデータベースに記録されている人物タグの中で、前記タグリーダで検出された人物タグが存在するか否かを判断する人物タグ判断部と、
前記人物タグが存在していた場合、前記タグリーダでは検出できなかった位置タグの位置に、前記人物タグを所持する人物が存在すると判断し、前記人物タグが存在していなかった場合、前記タグリーダでは検出できなかった位置タグの位置に、前記人物タグを所持していない人物が存在すると判断する物体位置判断部と、
をさらに備える請求項1に記載の物体位置推定システム。
【請求項3】
前記定常時可読位置タグデータベースには、前記タグリーダの姿勢、位置、又は、電波強度毎に、前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグの識別IDとが分別して記録されており、
前記未検出位置タグ判断手段の判断結果に基づき、定常時において検出されるべき位置タグの中で検出されなかった位置タグが複数存在した場合、どの位置タグの位置に、人物タグを所持した人、もしくは、人物タグを所持しない人が存在するのかを判断するため、前記検出されなかった位置タグの再検出処理の順序を決定する再検出処理判断手段と、
前記再検出処理判断手段で決定された再検出処理の順序に基づき、前記検出されなかった位置タグを切り分けて、個別に検出可能となるような前記タグリーダの姿勢、位置、又は、電波強度を前記定常時可読位置タグデータベースに基づいて判断し、前記判断結果を、前記タグリーダの観測範囲を変更する観測範囲制御部と、
前記観測範囲制御部からの前記観測範囲の変更制御により、前記タグリーダの姿勢、位置、又は、電波強度を変更するタグリーダ調整装置とを備える、請求項2に記載の物体位置推定システム。
【請求項4】
前記タグリーダ調整装置は、前記位置タグの上に前記人が存在したときに、前記位置タグが検出されなくなると前記未検出位置タグ判断部で判断したとき、前記タグリーダの電波の出力強度を調整する出力調整部である、請求項3に記載の物体位置推定システム。
【請求項5】
前記出力調整部は、前記人物タグが検出されたとき、前記定常時可読位置タグデータベースに検出可能と記録されている識別IDを持つ位置タグが全て検出されていた場合には、前記位置タグの中の何れかの位置タグが検出されなくなると前記未検出位置タグ位置判断部で判断するまで、前記タグリーダの電波の出力強度を少しずつ弱めていく、請求項4に記載の物体位置推定システム。
【請求項6】
検出した前記人の位置の履歴を記録しておく観測履歴データベースと、
前記人が一人で存在したときに、検出できなくなる位置タグの枚数を基に前記人が一人で存在すると判断される状況において、前記枚数よりも多くの枚数の位置タグが検出されなかった場合、前記人が倒れている可能性があると判断する転倒判断部とをさらに備える、
請求項1から請求項5の何れか1つに記載の物体位置推定システム。
【請求項7】
人の出入りする環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDをタグリーダで読み取ったのち、
前記環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースとを使用して、
前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると物体位置推定部で判断する、
物体位置推定方法。
【請求項8】
コンピュータに、
人の出入りする環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、
前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、
前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースと、
前記環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDをタグリーダで読み取ったのち、前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると判断する物体位置推定部の機能を実現させるための物体位置推定プログラム。
【請求項1】
人の出入りする環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDを読み取るタグリーダと、
前記環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、
前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、
前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースと、
前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると判断する物体位置推定部と、
を備える物体位置推定システム。
【請求項2】
前記物体位置推定部は、
前記定常時可読位置タグデータベースに記録されている位置タグの中で、前記タグリーダでは検出できなかった位置タグが存在するか否かを判断する未検出位置タグ判断部と、
前記タグリーダでは検出できなかった位置タグの配置されている位置を、前記位置タグデータベースを参照することにより判断する未検出位置タグ位置判断部と、
前記人物タグデータベースに記録されている人物タグの中で、前記タグリーダで検出された人物タグが存在するか否かを判断する人物タグ判断部と、
前記人物タグが存在していた場合、前記タグリーダでは検出できなかった位置タグの位置に、前記人物タグを所持する人物が存在すると判断し、前記人物タグが存在していなかった場合、前記タグリーダでは検出できなかった位置タグの位置に、前記人物タグを所持していない人物が存在すると判断する物体位置判断部と、
をさらに備える請求項1に記載の物体位置推定システム。
【請求項3】
前記定常時可読位置タグデータベースには、前記タグリーダの姿勢、位置、又は、電波強度毎に、前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグの識別IDとが分別して記録されており、
前記未検出位置タグ判断手段の判断結果に基づき、定常時において検出されるべき位置タグの中で検出されなかった位置タグが複数存在した場合、どの位置タグの位置に、人物タグを所持した人、もしくは、人物タグを所持しない人が存在するのかを判断するため、前記検出されなかった位置タグの再検出処理の順序を決定する再検出処理判断手段と、
前記再検出処理判断手段で決定された再検出処理の順序に基づき、前記検出されなかった位置タグを切り分けて、個別に検出可能となるような前記タグリーダの姿勢、位置、又は、電波強度を前記定常時可読位置タグデータベースに基づいて判断し、前記判断結果を、前記タグリーダの観測範囲を変更する観測範囲制御部と、
前記観測範囲制御部からの前記観測範囲の変更制御により、前記タグリーダの姿勢、位置、又は、電波強度を変更するタグリーダ調整装置とを備える、請求項2に記載の物体位置推定システム。
【請求項4】
前記タグリーダ調整装置は、前記位置タグの上に前記人が存在したときに、前記位置タグが検出されなくなると前記未検出位置タグ判断部で判断したとき、前記タグリーダの電波の出力強度を調整する出力調整部である、請求項3に記載の物体位置推定システム。
【請求項5】
前記出力調整部は、前記人物タグが検出されたとき、前記定常時可読位置タグデータベースに検出可能と記録されている識別IDを持つ位置タグが全て検出されていた場合には、前記位置タグの中の何れかの位置タグが検出されなくなると前記未検出位置タグ位置判断部で判断するまで、前記タグリーダの電波の出力強度を少しずつ弱めていく、請求項4に記載の物体位置推定システム。
【請求項6】
検出した前記人の位置の履歴を記録しておく観測履歴データベースと、
前記人が一人で存在したときに、検出できなくなる位置タグの枚数を基に前記人が一人で存在すると判断される状況において、前記枚数よりも多くの枚数の位置タグが検出されなかった場合、前記人が倒れている可能性があると判断する転倒判断部とをさらに備える、
請求項1から請求項5の何れか1つに記載の物体位置推定システム。
【請求項7】
人の出入りする環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDをタグリーダで読み取ったのち、
前記環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースとを使用して、
前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると物体位置推定部で判断する、
物体位置推定方法。
【請求項8】
コンピュータに、
人の出入りする環境に対する出入りが許可された人物が所持する人物タグに記録された識別IDと紐付けて、前記許可人物の人物IDを記録する人物タグデータベースと、
前記環境内に配置する位置タグに記録された識別IDと紐付けて、前記位置タグが配置されている位置情報を記録する位置タグデータベースと、
前記環境内に人が存在しない状況において、検出可能な位置タグの識別IDと検出不可能な位置タグとを分別して記録する定常時可読位置タグデータベースと、
前記環境内に存在するタグを検出し、前記タグに固有に割り当てられるタグの識別IDをタグリーダで読み取ったのち、前記定常時可読位置タグデータベースに、検出可能と記録されている識別IDを持つ位置タグが検出されなかった状況において、前記人物タグデータベースに記録されている人物IDを持つ人物タグも検出されていないとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、不審者が存在すると判断し、前記人物タグデータベースに記録されている人物IDを持つ人物タグが検出されているとき、前記位置タグデータベースに記録されている位置情報に基づいて、前記識別IDを持つタグが配置されている位置に、前記人物IDを持つ正規人物が存在すると判断する物体位置推定部の機能を実現させるための物体位置推定プログラム。
【図1A】



【図1B】
【図2】
【図3】

【図4】

【図5】
【図6】

【図7】
【図8A】
【図8B】
【図9】
【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図10F】
【図11】

【図12】
【図13】
【図14A】
【図14B】
【図14C】
【図15A】
【図15B】
【図15C】
【図16A】
【図16B】

【図17】

【図18】
【図1B】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9】
【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図10F】
【図11】
【図12】
【図13】
【図14A】
【図14B】
【図14C】
【図15A】
【図15B】
【図15C】
【図16A】
【図16B】
【図17】
【図18】
【公開番号】特開2013−73590(P2013−73590A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−214553(P2011−214553)
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]