
物体把持装置および景品取得ゲーム装置
【課題】従来よりも安価なモータでアームの自重による把持力よりも弱い把持力を実現する。
【解決手段】可動式のベース部に取り付け可能であり、物体を把持するためのアーム部8と、アーム部8に対応する駆動機構70と、アーム部8と駆動機構70とを連結する弾性体73と、アーム部8が回動する際のアーム軸82aの位置を検出するアーム軸位置検出部74と、駆動機構70の出力軸75aの位置を検出する駆動機構位置検出部72と、アーム軸82aの位置および出力軸75aの位置に基づいて、駆動機構70に含まれるモータの駆動を制御する駆動制御部と、を備える。
【解決手段】可動式のベース部に取り付け可能であり、物体を把持するためのアーム部8と、アーム部8に対応する駆動機構70と、アーム部8と駆動機構70とを連結する弾性体73と、アーム部8が回動する際のアーム軸82aの位置を検出するアーム軸位置検出部74と、駆動機構70の出力軸75aの位置を検出する駆動機構位置検出部72と、アーム軸82aの位置および出力軸75aの位置に基づいて、駆動機構70に含まれるモータの駆動を制御する駆動制御部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体把持装置および景品取得ゲーム装置に関する。
【背景技術】
【0002】
筐体の内部に収納された景品の獲得を目的とするクレーンゲーム機のような景品取得ゲーム装置は、その操作に面白味があるとともに、人気のあるキャラクタ等を景品に用いることでプレーヤの挑戦意欲をそそるため、アミューズメント施設はもちろんのこと、一般の店舗やショッピングモール等にも多く設置されている。従来、このような景品取得ゲーム装置として様々なものが提案され、商品化されている(例えば、下記特許文献1および特許文献2参照)。このような景品取得ゲーム装置では、景品を保持して持ち上げる物体把持装置のアームの把持力が、景品の取得率に大きな影響を与えるため、把持力を調整する仕組みが必要となる。
【0003】
特許文献1に記載の物体把持装置では、アームと閉方向駆動機構とを引っ張りばねで連結し、閉方向駆動機構の閉め込み位置を調整することで把持力を変化させている。しかしながら、特許文献1に記載の物体把持装置では、ばねが閉方向に付勢しない状態でアームが閉じられても、アームの自重によって把持力が発生してしまうため、景品の重さや形状によっては景品が容易に取得されてしまい、難易度の調整が困難であった。
【0004】
一方、特許文献2に記載の物体把持装置は、電動モータでアームを直接駆動することにより、アームの自重を打ち消している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−279306号公報
【特許文献2】特開2006−43303号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、特許文献2に記載の物体把持装置では、アームの自重を打ち消すために、高出力で微小なトルク制御を行っている。しかしながら、このようなトルク制御を行う場合には、高出力で慣性モーメントが小さい小型のモータを備える必要があり、このような小型のモータは、一般に高価である。また、高出力で微小なトルク制御は発熱が伴うため連続して行うことは困難であり、モータの寿命が短くなる要因にもなり得る。
【0007】
そこで、本発明は、従来よりも安価な電動機でアームの自重による把持力よりも弱い把持力を実現することができる物体把持装置および景品取得ゲーム装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上述した課題を解決するため、本発明に係る物体把持装置は、可動式のベース部に取り付け可能であり、物体を把持するためのアームを含む、1つまたは複数のアーム部と、前記1つまたは複数のアーム部に対応する1つまたは複数の駆動機構と、前記アーム部と前記駆動機構とを連結する弾性体と、前記アーム部が回動する際のアーム軸の位置を検出するアーム軸位置検出部と、前記駆動機構の位置を検出する駆動機構位置検出部と、前記アーム軸の位置および前記駆動機構の位置に基づいて、前記駆動機構の駆動を制御する駆動制御部と、を備えることを特徴とする。
【0009】
この発明によれば、弾性体が駆動機構とアーム部とを連結するため、駆動機構から付与される力によって変形する弾性体がアーム部に力を与えることでアーム部に開閉動作を行わせることができる。これにより、アーム軸の位置および駆動機構の位置に基づいて駆動機構を制御することができるため、位置制御を行うことでアーム部に開閉動作を行わせることが可能となる。それゆえに、トルク制御に必要な電動機よりも安価な、例えばステッピングモータやDCモータ等の電動機を使用することが可能となり、トルク制御に用いることができない、例えば超音波モータ等の電動機を使用することが可能となる。また、電動機の慣性モーメントがアーム軸に与える影響を低減することができるため、慣性モーメントの大きい電動機を使用することが可能となる。さらに、駆動時に発生する微振動を弾性体である程度吸収することができるため、精度の低い電動機を使用した場合であっても、アーム部側への影響を抑制することが可能となる。
【0010】
上記物体把持装置において、上記駆動制御部は、予め測定した前記アーム軸の位置に対して均衡する前記駆動機構の出力軸の位置である均衡位置を用いて前記駆動機構の駆動を制御し、前記弾性体は、前記駆動機構の駆動に応じて変形し、前記アーム部は、前記弾性体の変形により付加される力で把持力を発生させることができる。
【0011】
これにより、アーム部の自重を加味して測定された均衡位置を基準にしてアーム部の動作を制御することができるため、アーム部の自重による把持力を打ち消した状態でアーム部を開閉させることが可能となる。
【0012】
上記物体把持装置において、上記駆動制御部は、前記駆動機構の出力軸の目標位置として、前記均衡位置に予め設定した値を加えた位置を設定し、前記駆動機構の駆動を制御することができる。
【0013】
これにより、均衡位置に所望の値を加えて制御することができるため、アームの自重による把持力よりも弱い把持力から、強い把持力まで、様々な強さの把持力を自在に発生させることが可能となる。
【0014】
上記物体把持装置において、上記予め設定した値は、前記アーム軸の複数の位置ごとに設定することができる。
【0015】
これにより、様々な特性を有するアーム部を実現することが可能となる。
【0016】
上記物体把持装置において、上記均衡位置を測定する均衡位置測定部を、さらに備え、前記均衡位置測定部は、前記アーム部の回動が停止する位置を用いて前記アーム部の可動範囲を決定し、前記アーム部の可動範囲内における前記均衡位置を測定することができる。
【0017】
上記物体把持装置において、上記均衡位置測定部は、前記アームが異なる種別に交換されるたびに前記均衡位置を測定することができる。
【0018】
上記物体把持装置において、上記アーム部の可動範囲内における前記均衡位置に基づいて、前記アーム部の可動範囲外における前記均衡位置を推定する均衡位置推定部を、さらに備えることができる。
【0019】
これにより、アーム部の可動範囲が変わった場合であっても、均衡位置の再測定を不要にすることが可能となる。
【0020】
上記物体把持装置において、上記アーム部の回動動作を急変動させた後の前記アーム軸の位置変化の特性を算出し、予め記憶した既知の前記アームの前記位置変化の特性と比較して前記アームの種別を判定するアーム種別判定部を、さらに備えることができる。
【0021】
上記物体把持装置において、上記アームの種別に基づいて、少なくとも前記ベース部の稼働範囲、稼働速度または稼働方式のいずれか一つを変更する稼働制御部を、さらに備えることができる。
【0022】
上記物体把持装置において、上記アーム部の回動動作を急変動させた後の前記アーム軸の位置変化の特性を算出し、前記アームの重さと重心の偏りを推定する推定部を、さらに備えることができる。
【0023】
上記物体把持装置において、上記アームの重さと重心の偏りに基づいて、少なくとも前記ベース部の稼働範囲、稼働速度または稼働方式のいずれか一つを変更する稼働制御部を、さらに備えることができる。
【0024】
上記物体把持装置において、上記駆動機構は少なくとも電動機を含み、上記駆動制御部は前記電動機の駆動を制御することとしてもよい。
【発明の効果】
【0025】
本発明によれば、従来よりも安価な電動機でアームの自重による把持力よりも弱い把持力を実現することができる。
【図面の簡単な説明】
【0026】
【図1】実施形態における景品取得ゲーム装置の外観構成を示す斜視図である。
【図2】実施形態における景品取得ゲーム装置を上部方向から見た場合の斜視図である。
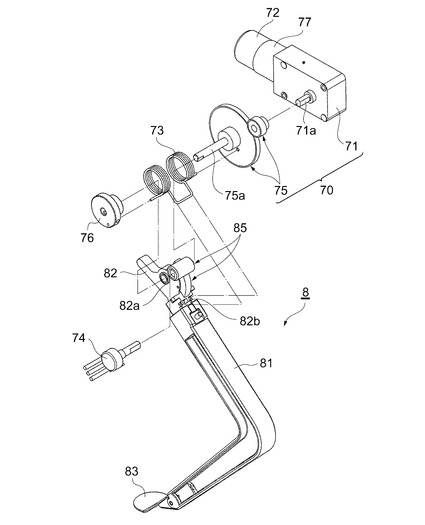
【図3】実施形態における物体把持装置の外観構成を示す斜視図である。
【図4】図3に示す物体把持装置の一部を分解した状態で示す斜視図である。
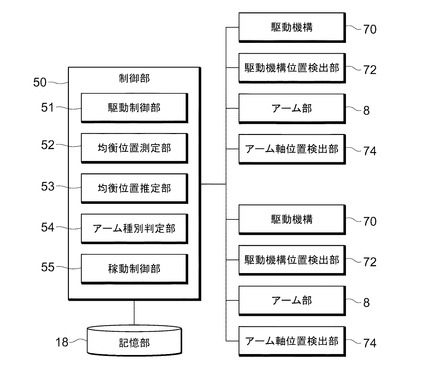
【図5】実施形態における物体把持装置の機能構成を示すブロック図である。
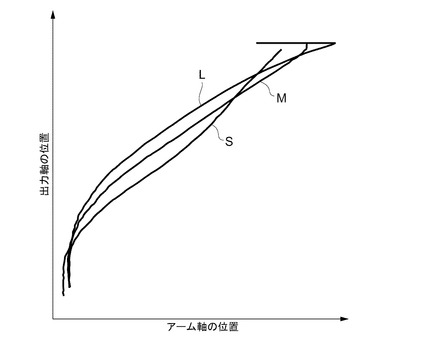
【図6】急変動前後のアーム軸の位置と出力軸の位置との間の変化の相関関係を示す図である。
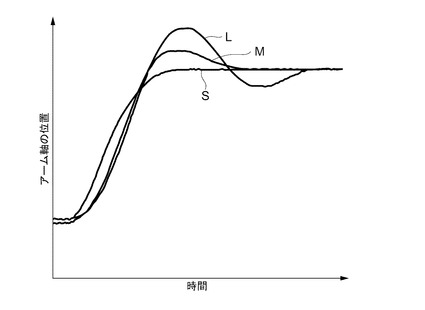
【図7】急変動前後のアーム軸の位置の時間変化を示す図である。
【図8】アーム部の可動範囲を決定する際の動作を示すフローチャート(その1)である。
【図9】アーム部の可動範囲を決定する際の動作を示すフローチャート(その2)である。
【図10】アーム軸と出力軸との均衡時における位置関係を測定する際の動作を示すフローチャートである。
【図11】アーム部を開閉する際の動作を示すフローチャートである。
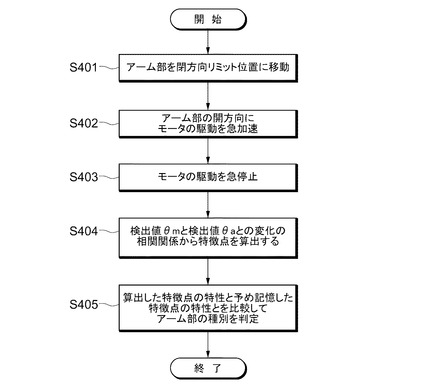
【図12】アームの種別を判定する際の動作を示すフローチャートである。
【発明を実施するための形態】
【0027】
以下、本発明の実施形態を、図面を参照して詳細に説明する。最初に、景品取得ゲーム装置の概略構成について説明する。図1は、実施形態における景品取得ゲーム装置の外観構成を示す斜視図である。図2は、実施形態における景品取得ゲーム装置を上部方向から見た場合の斜視図である。
【0028】
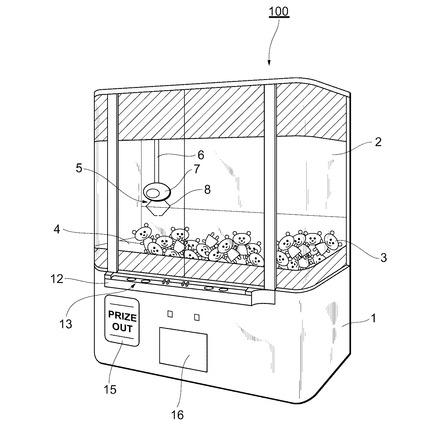
図1に示すように、景品取得ゲーム装置100は、直方体の基台1と、基台1の上に設けられた箱型の収容部2とから構成される。収容部2には、ぬいぐるみ等の景品3が収容される。収容部2の底部には、景品3を受けるための景品投入部4が設けられている。
【0029】
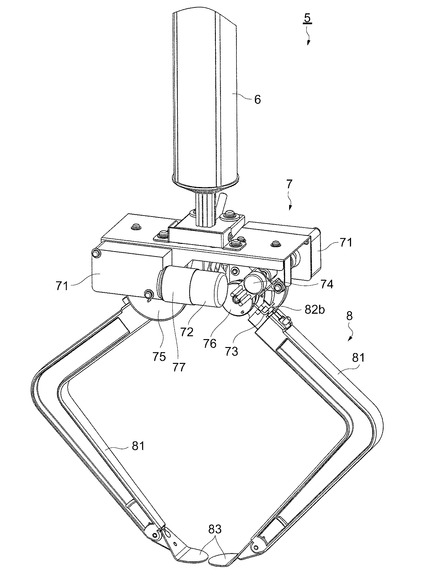
収容部2の内部上面には、物体把持装置5が吊り下げられている。物体把持装置5は、内部上面から鉛直方向に吊り下げられた伸縮パイプからなる支持部6と、支持部6の下端に設けられたベース部7と、ベース部7に取り付けられた2本のアーム部8とを有する。2本のアーム部8は、通常は閉じた状態となっているが、景品を掴む際に開くように構成されている。ベース部7は、カバーで覆われている。
【0030】
基台1には、プレーヤがプレイするための操作卓12が設けられている。操作卓12には、物体把持装置5を所望の景品3に対応する位置に停止させるためのボタンスイッチ13が設けられている。基台1の下方には、景品の取出口15と、開閉扉16とが設けられている。開閉扉16の内側には、店舗の管理者が景品取得ゲーム装置100の各種設定を行うための操作ボタン、操作ダイヤルおよび液晶パネル等のインタフェース(不図示)が設けられている。店舗の管理者が操作ボタン等を操作して各種設定を行うと、基台1内部に設けられたコンピュータが、その設定に基づいて景品取得ゲーム装置100を制御する。
【0031】
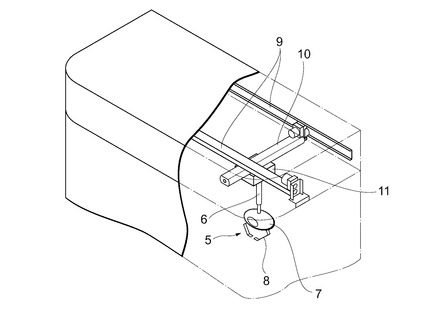
図2に示すように、収容部2の内部上面には、物体把持装置5が走行するための横行用固定レール9と、縦行用可動レール10とが設けられている。支持部6は、物体把持装置用基台11を介して縦行用可動レール10に配置されている。支持部6は、駆動源を含む稼働機構(不図示)によって横行用固定レール9および縦行用可動レール10上を走行可能に構成され、かつ上下方向にも伸縮可能に構成されている。
【0032】
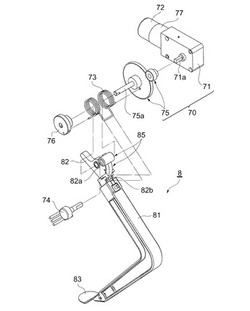
以下、本実施形態における景品取得ゲーム装置100の物体把持装置5について説明する。最初に、物体把持装置5の外観構成について説明する。図3は、カバーを外した状態の物体把持装置の外観構成を示す斜視図である。図4は、図3に示す物体把持装置の一部を分解した状態で示す斜視図である。
【0033】
物体把持装置5のアーム部8は、景品を把持するためのアーム81と、アーム81をベース部7に取り付ける基端部82と、景品を把持し易くする爪83とを有する。基端部82は、アーム部8が回動する際の軸となるアーム軸82aと、ベース部7の弾性体73の一部を基端部82に固定するための弾性体固定部82bと、を有する。
【0034】
物体把持装置5のベース部7は、ギアボックス71、ギア75およびモータ77を含んで構成する駆動機構70と、駆動機構70の出力軸75aの位置を検出する駆動機構位置検出部72と、アーム部8と駆動機構70とを連結する弾性体73(例えばトーションバネ)と、アーム部8が回動する際のアーム軸82aの位置を検出するアーム軸位置検出部74と、を有する。駆動機構70は、各アーム部8に対応して設けられる。
【0035】
上記出力軸75aやアーム軸82aの位置としては、例えば、各軸の基準位置からの回転角度や距離等を用いることができる。本実施形態では、各軸の位置として、基準位置からの回転角度を用いて説明する。また、基準位置として、アーム部が開方向リミット位置に位置するときの各軸の位置を用いて説明する。つまり、アーム部が開方向リミット位置に位置するときの各軸の位置(角度)を基準位置(例えば0)とし、アーム部が閉じるにつれて、各軸の位置(角度)が大きくなり、アーム部が閉方向リミット位置に到達したときに、各軸の位置(角度)が最大となる。
【0036】
なお、本実施形態では、回動式の駆動機構70を用いて説明するが、これに限定されず、直動式の駆動機構を用いることとしてもよい。また、キアボックス71およびギア75を介することなく、モータ77の軸(不図示)を弾性体73に直結することとしてもよい。
【0037】
物体把持装置5のアーム部8の開閉動作は、以下のしくみで行われる。駆動機構70のモータ77を駆動すると、駆動機構70の出力軸75aに連結する歯車75および留め具76と弾性体固定部82bとで固定されている弾性体73が変形する。続いて、弾性体73の変形に応じて弾性体73からアーム部8に力が加えられ、アーム部8が開閉動作を行う。弾性体73の力がアーム部8を押し下げる方向(アーム部8の内転方向)に作用する場合には、アーム部8が閉方向に動作し、弾性体73の力がアーム部8を引き上げる方向(アーム部8の外転方向)に作用する場合には、アーム部8が開方向に動作する。
【0038】
駆動機構位置検出部72の検出値θmおよびアーム軸位置検出部74の検出値θaは、駆動機構70が弾性体73に力を付与する際や、出力軸とアーム軸との位置関係を確認して把持力制御を行う際に使用される。
【0039】
本実施形態では、アーム部8と駆動機構70とが弾性体73を介して連結されているため、駆動機構70の出力軸75aの可動範囲を、アーム部8のアーム軸82a可動範囲よりも大きくすることが可能となる。つまり、アーム部8がストッパ部材や物等に当接して停止した後も、弾性体73が変形可能な間は、出力軸75aをそのまま回転し続けることが可能となる。
【0040】
次に、物体把持装置5の機能構成について説明する。図5は、物体把持装置の機能構成を示すブロック図である。物体把持装置5は、制御部50として、例えば、駆動制御部51と、均衡位置測定部52と、均衡位置推定部53と、アーム種別判定部54と、稼働制御部55と、を有する。
【0041】
駆動制御部51は、駆動機構70に含まれるモータを駆動させることで、アーム部8の開閉動作を制御する。
【0042】
具体的に、駆動制御部51は、アーム軸82aの位置に対して均衡する駆動機構70の出力軸75aの位置(以下、「均衡位置」という。)を用い、出力軸75aの目標位置を、均衡位置からずらした位置に設定することで、アーム部8の開閉を制御する。均衡位置は予め測定され、記憶部18に記憶されている。
【0043】
出力軸75aの目標位置を均衡位置よりも、どの程度ずらすのかによって、アーム部8の把持力を決めることができる。ずらしの度合は、例えば把持力値pとして表すことができる。この把持力値pを、所望する把持力に応じて設定する。例えばアーム部8が閉じる動作をしている際に物に当接して動かなくなった場合、出力軸75aの目標位置がその時点の均衡位置よりも把持力値pに応じた角度だけ大きくなるように制御することで、所望する把持力を実現することができる。
【0044】
なお、把持力値pは、一定の値であってもよいし、アーム軸82aの位置に応じて変動させることとしてもよい。把持力値pを一定の値にすることで、アーム部8の状態に関わらず一定の把持力を発揮させることができる。一方、把持力値pをアーム軸82aの位置に応じて変動させることで、様々な特性を有するアーム部を実現することが可能となる。例えば、アーム部8が開く方向に動作するのに応じて把持力値pが大きくなるようにすれば、ばねで引っ張られているような従来技術のアーム部と同様の特性を実現することができる。
【0045】
駆動制御部51は、出力軸75aの目標位置として、均衡位置に把持力値pを加えた位置を設定してモータを駆動することで、アーム部8に所望の把持力を発生させる。
【0046】
駆動制御部51は、駆動機構位置検出部72の検出値θmが目標位置の値よりも大きな値を示す場合には、アーム部8が開く方向にモータを駆動させ、検出値θmが目標位置の値よりも小さな値を示す場合には、アーム部8が閉じる方向にモータを駆動させる。なお、モータの駆動方向を決定する際の判定基準となる目標位置に、マージンとして敏感度sを加えることとしてもよい。敏感度sを加算することで、検出値θmに誤差が含まれている場合や、モータの速度制御の精度が低い場合に生じ得るアーム部8の開閉動作の発振現象を抑制することが可能となる。
【0047】
均衡位置測定部52は、アーム部8の回動が停止する位置を測定してアーム部8の可動範囲を決定し、アーム部8の可動範囲内における均衡位置を測定する。均衡位置は、アーム軸82aの位置に応じて、そのときのアーム軸82aの位置と均衡している駆動機構70の出力軸75aの位置を測定していくことで求めることができる。測定した均衡位置は、記憶部18に記憶する。なお、均衡位置の測定は、アーム81が異なる種別のアーム81に交換されるたびに実行することとしてもよい。これにより、未知のアームに交換された場合であっても測定し直した均衡位置を用いて対応することが可能となる。また、複数の既知のアームの均衡位置を予め登録しておき、アームを交換したときに、登録されている複数の均衡位置の中から、交換後のアームに対応する均衡位置をスイッチ等を用いて選択することとしてもよい。
【0048】
均衡位置推定部53は、既に測定済みのアーム部8の可動範囲内における均衡位置に基づいて、アーム部8の可動範囲外における均衡位置を推定する。これは、物体把持装置5では、アーム81の形状や爪83の形状に応じて、アーム部8の閉まる位置を変更することができ、アーム部8の閉まる位置を変更した場合には、アーム部8の可動範囲が変わるため、これに対応できるようにしたものである。つまり、アーム部8の可動範囲が変わっても、均衡位置の再測定を不要とするために、予めアーム部8の可動範囲外における均衡位置も算出しておくこととしたものである。
【0049】
アーム種別判定部54は、アーム部8の回動動作を急変動させた後のアーム軸82aの位置変化の特性を算出し、予め記憶部18に記憶されている既知のアームの位置変化の特性と比較してアーム81の種別を判定する。回動動作の急変動としては、例えば、アーム部8を急加速させることや、駆動機構70の出力軸75aを急制動させることが該当する。アーム部8を急加速させると、アーム軸82aの加速の遅延度合に基づいて、アーム81の重さや重心の偏りの特性を推定することができる。また、出力軸75aを急制動させると、アーム軸82aが停止するまでの位置変化に基づいて、アーム81の重さや重心の偏りの特性を推定することができる。
【0050】
アーム軸82aの位置変化の特性は、例えば、アーム部8の回動動作を急変動させた後のアーム軸82aの位置と出力軸75aの位置との間の変化の相関関係に基づいて算出することができる。図6に、その相関関係を表すグラフを例示する。図6に示すLは種別が大サイズのアームの特性グラフであり、Mは種別が中サイズのアームの特性グラフであり、Sは種別が小サイズのアームの特性グラフである。
【0051】
図6に示すように、特性グラフごとに、Δθa=0となる特徴点(極値)の個数や位置が相違する。このような相違は、アームの自重や重心の位置によって変動する慣性モーメントの相違により現れる。したがって、アーム種別判定部54は、Δθa=0となる特徴点の個数や位置を比較することで、アームの種別を判定することが可能となる。
【0052】
なお、アーム軸82aの位置変化の特性は、上記相関関係に基づいて算出することには限定されない。例えば、急変動中の均衡位置とのずれ具合や、急変動後のアーム軸82aの位置の時間変化に基づいて算出してもよい。図7に、アーム部8の回動動作を急変動させた前後の経過時間に対するアーム軸82aの位置変化を表すグラフを例示する。この場合も、アーム種別判定部54は、Δθa=0となる特徴点の個数や位置を比較することで、アーム81の種別を判定することができる。
【0053】
稼働制御部55は、アーム81の種別に基づいて、ベース部7の稼働範囲や稼働速度、稼働方式を変更する。なお、稼働範囲、稼働速度、稼働方式のうちのいずれか一つを変更することとしてもよい。また、アーム81の種別に基づいて、予め記憶部18に記憶されている均衡位置を変更することとしてもよい。また、変更する際の判定基準は、アーム81の種別に基づくことには限定されず、例えば、アーム81の重さと重心の偏りに基づいて変更することとしてもよい。この場合には、例えば、アーム部8の回動動作を急変動させた後のアーム軸82aの位置変化の特性を算出し、アーム81の重さと重心の偏りを推定する推定部を備えることとすればよい。
【0054】
次に、物体把持装置5の動作について説明する。最初に、図8および図9を参照して、アーム部8の可動範囲を決定する際の動作について説明する。
【0055】
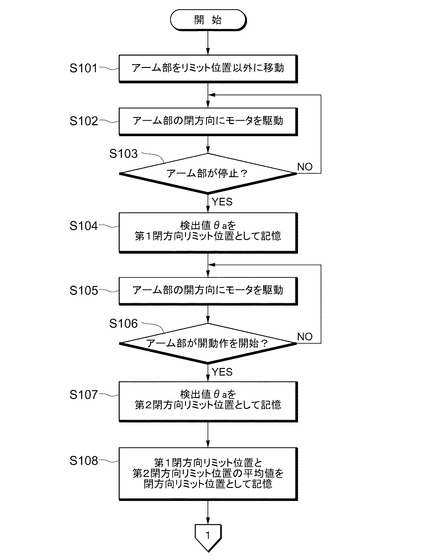
最初に、駆動制御部51は、アーム部8がリミット位置以外に位置するようにモータを駆動させる(ステップS101)。
【0056】
続いて、駆動制御部51は、アーム部8が閉じる方向にモータを駆動させ(ステップS102)、アーム軸位置検出部74の検出値θaに基づいてアーム部8が停止したか否かを判定する(ステップS103)。この判定がNOである場合(ステップS103;NO)に、駆動制御部51は、アーム部8が停止するまでモータを駆動させる。
【0057】
一方、上記ステップS103の判定でアーム部8が停止したと判定された場合(ステップS103;YES)に、均衡位置測定部52は、この時点のアーム軸位置検出部74の検出値θaを、第1閉方向リミット位置として記憶部18に記憶させる(ステップS104)。
【0058】
続いて、駆動制御部51は、アーム部8が開く方向にモータを駆動させ(ステップS105)、アーム軸位置検出部74の検出値θaに基づいてアーム部8が開動作を開始したか否かを判定する(ステップS106)。この判定がNOである場合(ステップS106;NO)に、駆動制御部51は、アーム部8が開動作を開始するまでモータを駆動させる。
【0059】
一方、上記ステップS106の判定でアーム部8が開動作を開始したと判定された場合(ステップS106;YES)に、均衡位置測定部52は、この時点のアーム軸位置検出部74の検出値θaを、第2閉方向リミット位置として記憶部18に記憶させる(ステップS107)。
【0060】
続いて、均衡位置測定部52は、第1閉方向リミット位置と第2閉方向リミット位置との平均値を算出し、算出した平均値を閉方向リミット位置として記憶部18に記憶させる(ステップS108)。
【0061】
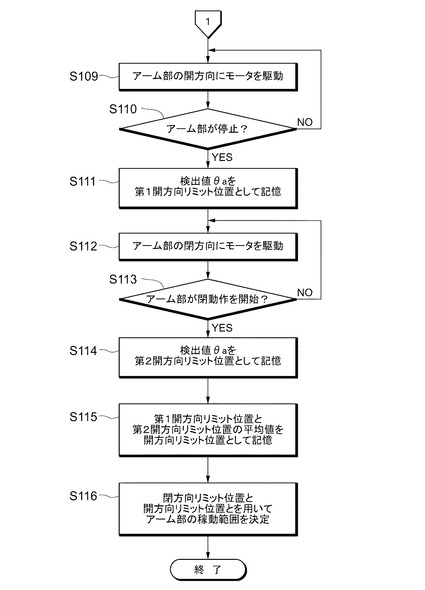
続いて、駆動制御部51は、アーム部8が開く方向にモータを駆動させ(ステップS109)、アーム軸位置検出部74の検出値θaに基づいてアーム部8が停止したか否かを判定する(ステップS110)。この判定がNOである場合(ステップS110;NO)に、駆動制御部51は、アーム部8が停止するまでモータを駆動させる。
【0062】
一方、上記ステップS110の判定でアーム部8が停止したと判定された場合(ステップS110;YES)に、均衡位置測定部52は、この時点のアーム軸位置検出部74の検出値θaを、第1開方向リミット位置として記憶部18に記憶させる(ステップS111)。
【0063】
続いて、駆動制御部51は、アーム部8が閉じる方向にモータを駆動させ(ステップS112)、アーム軸位置検出部74の検出値θaに基づいてアーム部8が閉動作を開始したか否かを判定する(ステップS113)。この判定がNOである場合(ステップS113;NO)に、駆動制御部51は、アーム部8が閉動作を開始するまでモータを駆動させる。
【0064】
一方、上記ステップS113の判定でアーム部8が閉動作を開始したと判定された場合(ステップS113;YES)に、均衡位置測定部52は、この時点のアーム軸位置検出部74の検出値θaを、第2開方向リミット位置として記憶部18に記憶させる(ステップS114)。
【0065】
続いて、均衡位置測定部52は、第1開方向リミット位置と第2開方向リミット位置との平均値を算出し、算出した平均値を開方向リミット位置として記憶部18に記憶させる(ステップS115)。
【0066】
続いて、均衡位置測定部52は、上記ステップS108で記憶させた閉方向リミット位置と、上記ステップS115で記憶させた開方向リミット位置とを用い、アーム部8の可動範囲を決定する(ステップS116)。
【0067】
このように、アーム部8の可動範囲を求めておくことで、アーム部8を動作させるたびにアーム部8が可動範囲を超えてストッパ部材等に衝突してしまう事態を回避することが可能となる。
【0068】
なお、この動作例では、アーム部8のリミット位置として、第1リミット位置と第2リミット位置との平均値を用いているが、第1リミット位置か第2リミット位置のいずれか一方をアーム部8のリミット位置としてもよい。
【0069】
次に、図10を参照して、アーム軸82aと出力軸75aとの均衡時における位置関係を測定する際の動作について説明する。
【0070】
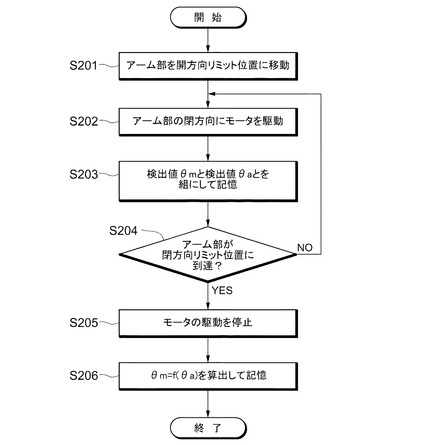
最初に、駆動制御部51は、モータを駆動してアーム部8を開方向リミット位置に移動させる(ステップS201)。
【0071】
続いて、駆動制御部51は、アーム部8が閉じる方向にモータを駆動させる(ステップS202)。
【0072】
続いて、均衡位置測定部52は、同時点の駆動機構位置検出部72の検出値θmとアーム軸位置検出部74の検出値θaとを組にして記憶部18に記憶させる(ステップS203)。
【0073】
続いて、駆動制御部51は、アーム軸位置検出部74の検出値θaに基づいてアーム部8が閉方向リミット位置に到達したか否かを判定する(ステップS204)。この判定がNOである場合(ステップS204;NO)には、上記ステップS202に処理を移行する。
【0074】
一方、上記ステップS204の判定でアーム部8が閉方向リミット位置に到達したと判定された場合(ステップS204;YES)に、駆動制御部51は、モータの駆動を停止させる(ステップS205)。
【0075】
続いて、均衡位置測定部52は、記憶部18に記憶させた検出値θmと検出値θaとの各組に基づいて、θmとθaとの相関関係を表す関数“θm=f(θa)”を算出し、この関数を記憶部18に記憶させる(ステップS206)。
【0076】
なお、この動作例では、モータを駆動させながら均衡時の位置関係を測定しているが、均衡時の位置関係を測定する際に各測定点でモータの駆動を停止させてもよい。各測定点でモータの駆動を停止させることで、均衡時の位置関係を測定する際の精度を向上させることができる。
【0077】
また、この動作例では、アーム部8が閉じる方向にモータを駆動させながら均衡時の位置関係を測定しているが、アーム部8が開く方向にモータを駆動させながら均衡時の位置関係を測定してもよい。ただし、アーム部8が閉じる方向にモータを駆動させながら均衡時の位置関係を測定した方が、アーム部8が開く方向にモータを駆動させながら均衡時の位置関係を測定した場合よりも高精度に測定することができる。アーム部8が閉じる方向にモータを駆動させた方が、弾性体73の状態が本来の均衡状態により近づくためである。
【0078】
また、均衡時の位置関係の測定点を、特定のアーム軸の位置に対する測定点に限定し、測定点間の値を直線的に補完することで関数“θm=f(θa)”を算出してもよい。これにより、測定精度が低い場合に生じ得る測定値のばらつきを抑えることができるため、制御時の安定性を向上させることができる。
【0079】
次に、図11を参照して、アーム部8を開閉する際の動作について説明する。
【0080】
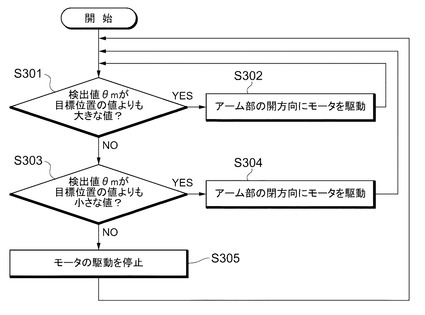
最初に、駆動制御部51は、駆動機構位置検出部72の検出値θmが目標位置の値よりも大きな値であるか否かを判定する(ステップS301)。この判定がYESである場合(ステップS301;YES)に、駆動制御部51は、アーム部8が開く方向にモータを駆動させ(ステップS302)、処理を上記ステップS301に移行する。
【0081】
一方、上記ステップS301の判定で検出値θmが目標位置の値よりも大きな値ではないと判定された場合(ステップS301;NO)に、駆動制御部51は、駆動機構位置検出部72の検出値θmが目標位置の値よりも小さな値であるか否かを判定する(ステップS303)。この判定がYESである場合(ステップS303;YES)に、駆動制御部51は、アーム部8が閉じる方向にモータを駆動させ(ステップS304)、処理を上記ステップS301に移行する。
【0082】
一方、上記ステップS303の判定で検出値θmが目標位置の値よりも小さな値ではないと判定された場合(ステップS303;NO)に、駆動制御部51は、モータの駆動を停止させ(ステップS305)、処理を上記ステップS301に移行する。
【0083】
次に、図12を参照して、アーム81の種別を判定する際の動作について説明する。この動作は、アーム81を取り付けた後に行う。
【0084】
最初に、駆動制御部51は、モータを駆動してアーム部8を閉方向リミット位置に移動させる(ステップS401)。
【0085】
続いて、駆動制御部51は、アーム部8が開く方向にモータの駆動を急加速させて(ステップS402)から、モータの駆動を急停止させる(ステップS403)。
【0086】
続いて、アーム種別判定部54は、モータを急停止させた後の駆動機構位置検出部72の検出値θmとアーム軸位置検出部74の検出値θaとの変化の相関関係に基づいて、特徴点を算出する(ステップS404)。
【0087】
続いて、アーム種別判定部54は、上記ステップS404で算出した特徴点の特性と、予め記憶部18に記憶されている既知のアームの特徴点の特性とを比較して、アーム81の種別を判定する(ステップS405)。
【0088】
このように、アーム81の種別を、上記特徴点の特性に基づいて判定することで、アーム81の種別を認識させるためのスイッチやセンサを不要にすることが可能となる。
【0089】
以上のように、本実施形態における景品取得ゲーム装置100の物体把持装置5によれば、弾性体73が駆動機構70とアーム部8とを連結するため、駆動機構70のモータから付与される力によって変形する弾性体73がアーム部8に力を与えることでアーム部8に開閉動作を行わせることができる。具体的には、アーム81の自重を加味して測定された均衡位置を基準にしてアーム部8の動作を制御することで、アーム81の自重による把持力を打ち消した状態でアーム部8を開閉させることが可能となる。また、均衡位置に所望の把持力値pを加えて制御することができるため、アームの自重による把持力よりも弱い把持力から、強い把持力まで、様々な強さの把持力を自在に発生させることが可能となる。
【0090】
これにより、アーム軸82aの位置および出力軸75aの位置に基づいてモータの駆動を制御することができるため、位置制御を行うことでアーム部8に開閉動作を行わせることができる。それゆえに、トルク制御に必要なモータよりも安価な、例えばステッピングモータやDCモータを使用することが可能となる。また、トルク制御に用いることができない、例えば超音波モータ等の電動機を使用することも可能となる。
【0091】
また、モータ77の軸の慣性モーメントがアーム軸82aに与える影響を低減することができるため、慣性モーメントの大きいモータを使用することも可能となる。さらに、モータ駆動時に発生する微振動を弾性体73である程度吸収することができるため、精度の低いモータを使用した場合であっても、アーム部8側への影響を抑制することが可能となる。
【0092】
なお、上述した実施形態では、2本のアーム部8を備えているが、アーム部の本数はこれに限定されず、1本や3本以上のアーム部を備えることとしてもよい。
【符号の説明】
【0093】
1…基台、2…収容部、5…物体把持装置、6…支持部、7…ベース部、8…アーム部、18…記憶部、50…制御部、51…駆動制御部、52…均衡位置測定部、53…均衡位置推定部、54…アーム種別判定部、55…稼働制御部、70…駆動機構、71…ギアボックス、72…駆動機構位置検出部、73…弾性体、74…アーム軸位置検出部、75…ギア、75a…出力軸、77…モータ、81…アーム、82…基端部、82a…アーム軸、82b…弾性体固定部、83…爪、100…景品取得ゲーム装置。
【技術分野】
【0001】
本発明は、物体把持装置および景品取得ゲーム装置に関する。
【背景技術】
【0002】
筐体の内部に収納された景品の獲得を目的とするクレーンゲーム機のような景品取得ゲーム装置は、その操作に面白味があるとともに、人気のあるキャラクタ等を景品に用いることでプレーヤの挑戦意欲をそそるため、アミューズメント施設はもちろんのこと、一般の店舗やショッピングモール等にも多く設置されている。従来、このような景品取得ゲーム装置として様々なものが提案され、商品化されている(例えば、下記特許文献1および特許文献2参照)。このような景品取得ゲーム装置では、景品を保持して持ち上げる物体把持装置のアームの把持力が、景品の取得率に大きな影響を与えるため、把持力を調整する仕組みが必要となる。
【0003】
特許文献1に記載の物体把持装置では、アームと閉方向駆動機構とを引っ張りばねで連結し、閉方向駆動機構の閉め込み位置を調整することで把持力を変化させている。しかしながら、特許文献1に記載の物体把持装置では、ばねが閉方向に付勢しない状態でアームが閉じられても、アームの自重によって把持力が発生してしまうため、景品の重さや形状によっては景品が容易に取得されてしまい、難易度の調整が困難であった。
【0004】
一方、特許文献2に記載の物体把持装置は、電動モータでアームを直接駆動することにより、アームの自重を打ち消している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−279306号公報
【特許文献2】特開2006−43303号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、特許文献2に記載の物体把持装置では、アームの自重を打ち消すために、高出力で微小なトルク制御を行っている。しかしながら、このようなトルク制御を行う場合には、高出力で慣性モーメントが小さい小型のモータを備える必要があり、このような小型のモータは、一般に高価である。また、高出力で微小なトルク制御は発熱が伴うため連続して行うことは困難であり、モータの寿命が短くなる要因にもなり得る。
【0007】
そこで、本発明は、従来よりも安価な電動機でアームの自重による把持力よりも弱い把持力を実現することができる物体把持装置および景品取得ゲーム装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上述した課題を解決するため、本発明に係る物体把持装置は、可動式のベース部に取り付け可能であり、物体を把持するためのアームを含む、1つまたは複数のアーム部と、前記1つまたは複数のアーム部に対応する1つまたは複数の駆動機構と、前記アーム部と前記駆動機構とを連結する弾性体と、前記アーム部が回動する際のアーム軸の位置を検出するアーム軸位置検出部と、前記駆動機構の位置を検出する駆動機構位置検出部と、前記アーム軸の位置および前記駆動機構の位置に基づいて、前記駆動機構の駆動を制御する駆動制御部と、を備えることを特徴とする。
【0009】
この発明によれば、弾性体が駆動機構とアーム部とを連結するため、駆動機構から付与される力によって変形する弾性体がアーム部に力を与えることでアーム部に開閉動作を行わせることができる。これにより、アーム軸の位置および駆動機構の位置に基づいて駆動機構を制御することができるため、位置制御を行うことでアーム部に開閉動作を行わせることが可能となる。それゆえに、トルク制御に必要な電動機よりも安価な、例えばステッピングモータやDCモータ等の電動機を使用することが可能となり、トルク制御に用いることができない、例えば超音波モータ等の電動機を使用することが可能となる。また、電動機の慣性モーメントがアーム軸に与える影響を低減することができるため、慣性モーメントの大きい電動機を使用することが可能となる。さらに、駆動時に発生する微振動を弾性体である程度吸収することができるため、精度の低い電動機を使用した場合であっても、アーム部側への影響を抑制することが可能となる。
【0010】
上記物体把持装置において、上記駆動制御部は、予め測定した前記アーム軸の位置に対して均衡する前記駆動機構の出力軸の位置である均衡位置を用いて前記駆動機構の駆動を制御し、前記弾性体は、前記駆動機構の駆動に応じて変形し、前記アーム部は、前記弾性体の変形により付加される力で把持力を発生させることができる。
【0011】
これにより、アーム部の自重を加味して測定された均衡位置を基準にしてアーム部の動作を制御することができるため、アーム部の自重による把持力を打ち消した状態でアーム部を開閉させることが可能となる。
【0012】
上記物体把持装置において、上記駆動制御部は、前記駆動機構の出力軸の目標位置として、前記均衡位置に予め設定した値を加えた位置を設定し、前記駆動機構の駆動を制御することができる。
【0013】
これにより、均衡位置に所望の値を加えて制御することができるため、アームの自重による把持力よりも弱い把持力から、強い把持力まで、様々な強さの把持力を自在に発生させることが可能となる。
【0014】
上記物体把持装置において、上記予め設定した値は、前記アーム軸の複数の位置ごとに設定することができる。
【0015】
これにより、様々な特性を有するアーム部を実現することが可能となる。
【0016】
上記物体把持装置において、上記均衡位置を測定する均衡位置測定部を、さらに備え、前記均衡位置測定部は、前記アーム部の回動が停止する位置を用いて前記アーム部の可動範囲を決定し、前記アーム部の可動範囲内における前記均衡位置を測定することができる。
【0017】
上記物体把持装置において、上記均衡位置測定部は、前記アームが異なる種別に交換されるたびに前記均衡位置を測定することができる。
【0018】
上記物体把持装置において、上記アーム部の可動範囲内における前記均衡位置に基づいて、前記アーム部の可動範囲外における前記均衡位置を推定する均衡位置推定部を、さらに備えることができる。
【0019】
これにより、アーム部の可動範囲が変わった場合であっても、均衡位置の再測定を不要にすることが可能となる。
【0020】
上記物体把持装置において、上記アーム部の回動動作を急変動させた後の前記アーム軸の位置変化の特性を算出し、予め記憶した既知の前記アームの前記位置変化の特性と比較して前記アームの種別を判定するアーム種別判定部を、さらに備えることができる。
【0021】
上記物体把持装置において、上記アームの種別に基づいて、少なくとも前記ベース部の稼働範囲、稼働速度または稼働方式のいずれか一つを変更する稼働制御部を、さらに備えることができる。
【0022】
上記物体把持装置において、上記アーム部の回動動作を急変動させた後の前記アーム軸の位置変化の特性を算出し、前記アームの重さと重心の偏りを推定する推定部を、さらに備えることができる。
【0023】
上記物体把持装置において、上記アームの重さと重心の偏りに基づいて、少なくとも前記ベース部の稼働範囲、稼働速度または稼働方式のいずれか一つを変更する稼働制御部を、さらに備えることができる。
【0024】
上記物体把持装置において、上記駆動機構は少なくとも電動機を含み、上記駆動制御部は前記電動機の駆動を制御することとしてもよい。
【発明の効果】
【0025】
本発明によれば、従来よりも安価な電動機でアームの自重による把持力よりも弱い把持力を実現することができる。
【図面の簡単な説明】
【0026】
【図1】実施形態における景品取得ゲーム装置の外観構成を示す斜視図である。
【図2】実施形態における景品取得ゲーム装置を上部方向から見た場合の斜視図である。
【図3】実施形態における物体把持装置の外観構成を示す斜視図である。
【図4】図3に示す物体把持装置の一部を分解した状態で示す斜視図である。
【図5】実施形態における物体把持装置の機能構成を示すブロック図である。
【図6】急変動前後のアーム軸の位置と出力軸の位置との間の変化の相関関係を示す図である。
【図7】急変動前後のアーム軸の位置の時間変化を示す図である。
【図8】アーム部の可動範囲を決定する際の動作を示すフローチャート(その1)である。
【図9】アーム部の可動範囲を決定する際の動作を示すフローチャート(その2)である。
【図10】アーム軸と出力軸との均衡時における位置関係を測定する際の動作を示すフローチャートである。
【図11】アーム部を開閉する際の動作を示すフローチャートである。
【図12】アームの種別を判定する際の動作を示すフローチャートである。
【発明を実施するための形態】
【0027】
以下、本発明の実施形態を、図面を参照して詳細に説明する。最初に、景品取得ゲーム装置の概略構成について説明する。図1は、実施形態における景品取得ゲーム装置の外観構成を示す斜視図である。図2は、実施形態における景品取得ゲーム装置を上部方向から見た場合の斜視図である。
【0028】
図1に示すように、景品取得ゲーム装置100は、直方体の基台1と、基台1の上に設けられた箱型の収容部2とから構成される。収容部2には、ぬいぐるみ等の景品3が収容される。収容部2の底部には、景品3を受けるための景品投入部4が設けられている。
【0029】
収容部2の内部上面には、物体把持装置5が吊り下げられている。物体把持装置5は、内部上面から鉛直方向に吊り下げられた伸縮パイプからなる支持部6と、支持部6の下端に設けられたベース部7と、ベース部7に取り付けられた2本のアーム部8とを有する。2本のアーム部8は、通常は閉じた状態となっているが、景品を掴む際に開くように構成されている。ベース部7は、カバーで覆われている。
【0030】
基台1には、プレーヤがプレイするための操作卓12が設けられている。操作卓12には、物体把持装置5を所望の景品3に対応する位置に停止させるためのボタンスイッチ13が設けられている。基台1の下方には、景品の取出口15と、開閉扉16とが設けられている。開閉扉16の内側には、店舗の管理者が景品取得ゲーム装置100の各種設定を行うための操作ボタン、操作ダイヤルおよび液晶パネル等のインタフェース(不図示)が設けられている。店舗の管理者が操作ボタン等を操作して各種設定を行うと、基台1内部に設けられたコンピュータが、その設定に基づいて景品取得ゲーム装置100を制御する。
【0031】
図2に示すように、収容部2の内部上面には、物体把持装置5が走行するための横行用固定レール9と、縦行用可動レール10とが設けられている。支持部6は、物体把持装置用基台11を介して縦行用可動レール10に配置されている。支持部6は、駆動源を含む稼働機構(不図示)によって横行用固定レール9および縦行用可動レール10上を走行可能に構成され、かつ上下方向にも伸縮可能に構成されている。
【0032】
以下、本実施形態における景品取得ゲーム装置100の物体把持装置5について説明する。最初に、物体把持装置5の外観構成について説明する。図3は、カバーを外した状態の物体把持装置の外観構成を示す斜視図である。図4は、図3に示す物体把持装置の一部を分解した状態で示す斜視図である。
【0033】
物体把持装置5のアーム部8は、景品を把持するためのアーム81と、アーム81をベース部7に取り付ける基端部82と、景品を把持し易くする爪83とを有する。基端部82は、アーム部8が回動する際の軸となるアーム軸82aと、ベース部7の弾性体73の一部を基端部82に固定するための弾性体固定部82bと、を有する。
【0034】
物体把持装置5のベース部7は、ギアボックス71、ギア75およびモータ77を含んで構成する駆動機構70と、駆動機構70の出力軸75aの位置を検出する駆動機構位置検出部72と、アーム部8と駆動機構70とを連結する弾性体73(例えばトーションバネ)と、アーム部8が回動する際のアーム軸82aの位置を検出するアーム軸位置検出部74と、を有する。駆動機構70は、各アーム部8に対応して設けられる。
【0035】
上記出力軸75aやアーム軸82aの位置としては、例えば、各軸の基準位置からの回転角度や距離等を用いることができる。本実施形態では、各軸の位置として、基準位置からの回転角度を用いて説明する。また、基準位置として、アーム部が開方向リミット位置に位置するときの各軸の位置を用いて説明する。つまり、アーム部が開方向リミット位置に位置するときの各軸の位置(角度)を基準位置(例えば0)とし、アーム部が閉じるにつれて、各軸の位置(角度)が大きくなり、アーム部が閉方向リミット位置に到達したときに、各軸の位置(角度)が最大となる。
【0036】
なお、本実施形態では、回動式の駆動機構70を用いて説明するが、これに限定されず、直動式の駆動機構を用いることとしてもよい。また、キアボックス71およびギア75を介することなく、モータ77の軸(不図示)を弾性体73に直結することとしてもよい。
【0037】
物体把持装置5のアーム部8の開閉動作は、以下のしくみで行われる。駆動機構70のモータ77を駆動すると、駆動機構70の出力軸75aに連結する歯車75および留め具76と弾性体固定部82bとで固定されている弾性体73が変形する。続いて、弾性体73の変形に応じて弾性体73からアーム部8に力が加えられ、アーム部8が開閉動作を行う。弾性体73の力がアーム部8を押し下げる方向(アーム部8の内転方向)に作用する場合には、アーム部8が閉方向に動作し、弾性体73の力がアーム部8を引き上げる方向(アーム部8の外転方向)に作用する場合には、アーム部8が開方向に動作する。
【0038】
駆動機構位置検出部72の検出値θmおよびアーム軸位置検出部74の検出値θaは、駆動機構70が弾性体73に力を付与する際や、出力軸とアーム軸との位置関係を確認して把持力制御を行う際に使用される。
【0039】
本実施形態では、アーム部8と駆動機構70とが弾性体73を介して連結されているため、駆動機構70の出力軸75aの可動範囲を、アーム部8のアーム軸82a可動範囲よりも大きくすることが可能となる。つまり、アーム部8がストッパ部材や物等に当接して停止した後も、弾性体73が変形可能な間は、出力軸75aをそのまま回転し続けることが可能となる。
【0040】
次に、物体把持装置5の機能構成について説明する。図5は、物体把持装置の機能構成を示すブロック図である。物体把持装置5は、制御部50として、例えば、駆動制御部51と、均衡位置測定部52と、均衡位置推定部53と、アーム種別判定部54と、稼働制御部55と、を有する。
【0041】
駆動制御部51は、駆動機構70に含まれるモータを駆動させることで、アーム部8の開閉動作を制御する。
【0042】
具体的に、駆動制御部51は、アーム軸82aの位置に対して均衡する駆動機構70の出力軸75aの位置(以下、「均衡位置」という。)を用い、出力軸75aの目標位置を、均衡位置からずらした位置に設定することで、アーム部8の開閉を制御する。均衡位置は予め測定され、記憶部18に記憶されている。
【0043】
出力軸75aの目標位置を均衡位置よりも、どの程度ずらすのかによって、アーム部8の把持力を決めることができる。ずらしの度合は、例えば把持力値pとして表すことができる。この把持力値pを、所望する把持力に応じて設定する。例えばアーム部8が閉じる動作をしている際に物に当接して動かなくなった場合、出力軸75aの目標位置がその時点の均衡位置よりも把持力値pに応じた角度だけ大きくなるように制御することで、所望する把持力を実現することができる。
【0044】
なお、把持力値pは、一定の値であってもよいし、アーム軸82aの位置に応じて変動させることとしてもよい。把持力値pを一定の値にすることで、アーム部8の状態に関わらず一定の把持力を発揮させることができる。一方、把持力値pをアーム軸82aの位置に応じて変動させることで、様々な特性を有するアーム部を実現することが可能となる。例えば、アーム部8が開く方向に動作するのに応じて把持力値pが大きくなるようにすれば、ばねで引っ張られているような従来技術のアーム部と同様の特性を実現することができる。
【0045】
駆動制御部51は、出力軸75aの目標位置として、均衡位置に把持力値pを加えた位置を設定してモータを駆動することで、アーム部8に所望の把持力を発生させる。
【0046】
駆動制御部51は、駆動機構位置検出部72の検出値θmが目標位置の値よりも大きな値を示す場合には、アーム部8が開く方向にモータを駆動させ、検出値θmが目標位置の値よりも小さな値を示す場合には、アーム部8が閉じる方向にモータを駆動させる。なお、モータの駆動方向を決定する際の判定基準となる目標位置に、マージンとして敏感度sを加えることとしてもよい。敏感度sを加算することで、検出値θmに誤差が含まれている場合や、モータの速度制御の精度が低い場合に生じ得るアーム部8の開閉動作の発振現象を抑制することが可能となる。
【0047】
均衡位置測定部52は、アーム部8の回動が停止する位置を測定してアーム部8の可動範囲を決定し、アーム部8の可動範囲内における均衡位置を測定する。均衡位置は、アーム軸82aの位置に応じて、そのときのアーム軸82aの位置と均衡している駆動機構70の出力軸75aの位置を測定していくことで求めることができる。測定した均衡位置は、記憶部18に記憶する。なお、均衡位置の測定は、アーム81が異なる種別のアーム81に交換されるたびに実行することとしてもよい。これにより、未知のアームに交換された場合であっても測定し直した均衡位置を用いて対応することが可能となる。また、複数の既知のアームの均衡位置を予め登録しておき、アームを交換したときに、登録されている複数の均衡位置の中から、交換後のアームに対応する均衡位置をスイッチ等を用いて選択することとしてもよい。
【0048】
均衡位置推定部53は、既に測定済みのアーム部8の可動範囲内における均衡位置に基づいて、アーム部8の可動範囲外における均衡位置を推定する。これは、物体把持装置5では、アーム81の形状や爪83の形状に応じて、アーム部8の閉まる位置を変更することができ、アーム部8の閉まる位置を変更した場合には、アーム部8の可動範囲が変わるため、これに対応できるようにしたものである。つまり、アーム部8の可動範囲が変わっても、均衡位置の再測定を不要とするために、予めアーム部8の可動範囲外における均衡位置も算出しておくこととしたものである。
【0049】
アーム種別判定部54は、アーム部8の回動動作を急変動させた後のアーム軸82aの位置変化の特性を算出し、予め記憶部18に記憶されている既知のアームの位置変化の特性と比較してアーム81の種別を判定する。回動動作の急変動としては、例えば、アーム部8を急加速させることや、駆動機構70の出力軸75aを急制動させることが該当する。アーム部8を急加速させると、アーム軸82aの加速の遅延度合に基づいて、アーム81の重さや重心の偏りの特性を推定することができる。また、出力軸75aを急制動させると、アーム軸82aが停止するまでの位置変化に基づいて、アーム81の重さや重心の偏りの特性を推定することができる。
【0050】
アーム軸82aの位置変化の特性は、例えば、アーム部8の回動動作を急変動させた後のアーム軸82aの位置と出力軸75aの位置との間の変化の相関関係に基づいて算出することができる。図6に、その相関関係を表すグラフを例示する。図6に示すLは種別が大サイズのアームの特性グラフであり、Mは種別が中サイズのアームの特性グラフであり、Sは種別が小サイズのアームの特性グラフである。
【0051】
図6に示すように、特性グラフごとに、Δθa=0となる特徴点(極値)の個数や位置が相違する。このような相違は、アームの自重や重心の位置によって変動する慣性モーメントの相違により現れる。したがって、アーム種別判定部54は、Δθa=0となる特徴点の個数や位置を比較することで、アームの種別を判定することが可能となる。
【0052】
なお、アーム軸82aの位置変化の特性は、上記相関関係に基づいて算出することには限定されない。例えば、急変動中の均衡位置とのずれ具合や、急変動後のアーム軸82aの位置の時間変化に基づいて算出してもよい。図7に、アーム部8の回動動作を急変動させた前後の経過時間に対するアーム軸82aの位置変化を表すグラフを例示する。この場合も、アーム種別判定部54は、Δθa=0となる特徴点の個数や位置を比較することで、アーム81の種別を判定することができる。
【0053】
稼働制御部55は、アーム81の種別に基づいて、ベース部7の稼働範囲や稼働速度、稼働方式を変更する。なお、稼働範囲、稼働速度、稼働方式のうちのいずれか一つを変更することとしてもよい。また、アーム81の種別に基づいて、予め記憶部18に記憶されている均衡位置を変更することとしてもよい。また、変更する際の判定基準は、アーム81の種別に基づくことには限定されず、例えば、アーム81の重さと重心の偏りに基づいて変更することとしてもよい。この場合には、例えば、アーム部8の回動動作を急変動させた後のアーム軸82aの位置変化の特性を算出し、アーム81の重さと重心の偏りを推定する推定部を備えることとすればよい。
【0054】
次に、物体把持装置5の動作について説明する。最初に、図8および図9を参照して、アーム部8の可動範囲を決定する際の動作について説明する。
【0055】
最初に、駆動制御部51は、アーム部8がリミット位置以外に位置するようにモータを駆動させる(ステップS101)。
【0056】
続いて、駆動制御部51は、アーム部8が閉じる方向にモータを駆動させ(ステップS102)、アーム軸位置検出部74の検出値θaに基づいてアーム部8が停止したか否かを判定する(ステップS103)。この判定がNOである場合(ステップS103;NO)に、駆動制御部51は、アーム部8が停止するまでモータを駆動させる。
【0057】
一方、上記ステップS103の判定でアーム部8が停止したと判定された場合(ステップS103;YES)に、均衡位置測定部52は、この時点のアーム軸位置検出部74の検出値θaを、第1閉方向リミット位置として記憶部18に記憶させる(ステップS104)。
【0058】
続いて、駆動制御部51は、アーム部8が開く方向にモータを駆動させ(ステップS105)、アーム軸位置検出部74の検出値θaに基づいてアーム部8が開動作を開始したか否かを判定する(ステップS106)。この判定がNOである場合(ステップS106;NO)に、駆動制御部51は、アーム部8が開動作を開始するまでモータを駆動させる。
【0059】
一方、上記ステップS106の判定でアーム部8が開動作を開始したと判定された場合(ステップS106;YES)に、均衡位置測定部52は、この時点のアーム軸位置検出部74の検出値θaを、第2閉方向リミット位置として記憶部18に記憶させる(ステップS107)。
【0060】
続いて、均衡位置測定部52は、第1閉方向リミット位置と第2閉方向リミット位置との平均値を算出し、算出した平均値を閉方向リミット位置として記憶部18に記憶させる(ステップS108)。
【0061】
続いて、駆動制御部51は、アーム部8が開く方向にモータを駆動させ(ステップS109)、アーム軸位置検出部74の検出値θaに基づいてアーム部8が停止したか否かを判定する(ステップS110)。この判定がNOである場合(ステップS110;NO)に、駆動制御部51は、アーム部8が停止するまでモータを駆動させる。
【0062】
一方、上記ステップS110の判定でアーム部8が停止したと判定された場合(ステップS110;YES)に、均衡位置測定部52は、この時点のアーム軸位置検出部74の検出値θaを、第1開方向リミット位置として記憶部18に記憶させる(ステップS111)。
【0063】
続いて、駆動制御部51は、アーム部8が閉じる方向にモータを駆動させ(ステップS112)、アーム軸位置検出部74の検出値θaに基づいてアーム部8が閉動作を開始したか否かを判定する(ステップS113)。この判定がNOである場合(ステップS113;NO)に、駆動制御部51は、アーム部8が閉動作を開始するまでモータを駆動させる。
【0064】
一方、上記ステップS113の判定でアーム部8が閉動作を開始したと判定された場合(ステップS113;YES)に、均衡位置測定部52は、この時点のアーム軸位置検出部74の検出値θaを、第2開方向リミット位置として記憶部18に記憶させる(ステップS114)。
【0065】
続いて、均衡位置測定部52は、第1開方向リミット位置と第2開方向リミット位置との平均値を算出し、算出した平均値を開方向リミット位置として記憶部18に記憶させる(ステップS115)。
【0066】
続いて、均衡位置測定部52は、上記ステップS108で記憶させた閉方向リミット位置と、上記ステップS115で記憶させた開方向リミット位置とを用い、アーム部8の可動範囲を決定する(ステップS116)。
【0067】
このように、アーム部8の可動範囲を求めておくことで、アーム部8を動作させるたびにアーム部8が可動範囲を超えてストッパ部材等に衝突してしまう事態を回避することが可能となる。
【0068】
なお、この動作例では、アーム部8のリミット位置として、第1リミット位置と第2リミット位置との平均値を用いているが、第1リミット位置か第2リミット位置のいずれか一方をアーム部8のリミット位置としてもよい。
【0069】
次に、図10を参照して、アーム軸82aと出力軸75aとの均衡時における位置関係を測定する際の動作について説明する。
【0070】
最初に、駆動制御部51は、モータを駆動してアーム部8を開方向リミット位置に移動させる(ステップS201)。
【0071】
続いて、駆動制御部51は、アーム部8が閉じる方向にモータを駆動させる(ステップS202)。
【0072】
続いて、均衡位置測定部52は、同時点の駆動機構位置検出部72の検出値θmとアーム軸位置検出部74の検出値θaとを組にして記憶部18に記憶させる(ステップS203)。
【0073】
続いて、駆動制御部51は、アーム軸位置検出部74の検出値θaに基づいてアーム部8が閉方向リミット位置に到達したか否かを判定する(ステップS204)。この判定がNOである場合(ステップS204;NO)には、上記ステップS202に処理を移行する。
【0074】
一方、上記ステップS204の判定でアーム部8が閉方向リミット位置に到達したと判定された場合(ステップS204;YES)に、駆動制御部51は、モータの駆動を停止させる(ステップS205)。
【0075】
続いて、均衡位置測定部52は、記憶部18に記憶させた検出値θmと検出値θaとの各組に基づいて、θmとθaとの相関関係を表す関数“θm=f(θa)”を算出し、この関数を記憶部18に記憶させる(ステップS206)。
【0076】
なお、この動作例では、モータを駆動させながら均衡時の位置関係を測定しているが、均衡時の位置関係を測定する際に各測定点でモータの駆動を停止させてもよい。各測定点でモータの駆動を停止させることで、均衡時の位置関係を測定する際の精度を向上させることができる。
【0077】
また、この動作例では、アーム部8が閉じる方向にモータを駆動させながら均衡時の位置関係を測定しているが、アーム部8が開く方向にモータを駆動させながら均衡時の位置関係を測定してもよい。ただし、アーム部8が閉じる方向にモータを駆動させながら均衡時の位置関係を測定した方が、アーム部8が開く方向にモータを駆動させながら均衡時の位置関係を測定した場合よりも高精度に測定することができる。アーム部8が閉じる方向にモータを駆動させた方が、弾性体73の状態が本来の均衡状態により近づくためである。
【0078】
また、均衡時の位置関係の測定点を、特定のアーム軸の位置に対する測定点に限定し、測定点間の値を直線的に補完することで関数“θm=f(θa)”を算出してもよい。これにより、測定精度が低い場合に生じ得る測定値のばらつきを抑えることができるため、制御時の安定性を向上させることができる。
【0079】
次に、図11を参照して、アーム部8を開閉する際の動作について説明する。
【0080】
最初に、駆動制御部51は、駆動機構位置検出部72の検出値θmが目標位置の値よりも大きな値であるか否かを判定する(ステップS301)。この判定がYESである場合(ステップS301;YES)に、駆動制御部51は、アーム部8が開く方向にモータを駆動させ(ステップS302)、処理を上記ステップS301に移行する。
【0081】
一方、上記ステップS301の判定で検出値θmが目標位置の値よりも大きな値ではないと判定された場合(ステップS301;NO)に、駆動制御部51は、駆動機構位置検出部72の検出値θmが目標位置の値よりも小さな値であるか否かを判定する(ステップS303)。この判定がYESである場合(ステップS303;YES)に、駆動制御部51は、アーム部8が閉じる方向にモータを駆動させ(ステップS304)、処理を上記ステップS301に移行する。
【0082】
一方、上記ステップS303の判定で検出値θmが目標位置の値よりも小さな値ではないと判定された場合(ステップS303;NO)に、駆動制御部51は、モータの駆動を停止させ(ステップS305)、処理を上記ステップS301に移行する。
【0083】
次に、図12を参照して、アーム81の種別を判定する際の動作について説明する。この動作は、アーム81を取り付けた後に行う。
【0084】
最初に、駆動制御部51は、モータを駆動してアーム部8を閉方向リミット位置に移動させる(ステップS401)。
【0085】
続いて、駆動制御部51は、アーム部8が開く方向にモータの駆動を急加速させて(ステップS402)から、モータの駆動を急停止させる(ステップS403)。
【0086】
続いて、アーム種別判定部54は、モータを急停止させた後の駆動機構位置検出部72の検出値θmとアーム軸位置検出部74の検出値θaとの変化の相関関係に基づいて、特徴点を算出する(ステップS404)。
【0087】
続いて、アーム種別判定部54は、上記ステップS404で算出した特徴点の特性と、予め記憶部18に記憶されている既知のアームの特徴点の特性とを比較して、アーム81の種別を判定する(ステップS405)。
【0088】
このように、アーム81の種別を、上記特徴点の特性に基づいて判定することで、アーム81の種別を認識させるためのスイッチやセンサを不要にすることが可能となる。
【0089】
以上のように、本実施形態における景品取得ゲーム装置100の物体把持装置5によれば、弾性体73が駆動機構70とアーム部8とを連結するため、駆動機構70のモータから付与される力によって変形する弾性体73がアーム部8に力を与えることでアーム部8に開閉動作を行わせることができる。具体的には、アーム81の自重を加味して測定された均衡位置を基準にしてアーム部8の動作を制御することで、アーム81の自重による把持力を打ち消した状態でアーム部8を開閉させることが可能となる。また、均衡位置に所望の把持力値pを加えて制御することができるため、アームの自重による把持力よりも弱い把持力から、強い把持力まで、様々な強さの把持力を自在に発生させることが可能となる。
【0090】
これにより、アーム軸82aの位置および出力軸75aの位置に基づいてモータの駆動を制御することができるため、位置制御を行うことでアーム部8に開閉動作を行わせることができる。それゆえに、トルク制御に必要なモータよりも安価な、例えばステッピングモータやDCモータを使用することが可能となる。また、トルク制御に用いることができない、例えば超音波モータ等の電動機を使用することも可能となる。
【0091】
また、モータ77の軸の慣性モーメントがアーム軸82aに与える影響を低減することができるため、慣性モーメントの大きいモータを使用することも可能となる。さらに、モータ駆動時に発生する微振動を弾性体73である程度吸収することができるため、精度の低いモータを使用した場合であっても、アーム部8側への影響を抑制することが可能となる。
【0092】
なお、上述した実施形態では、2本のアーム部8を備えているが、アーム部の本数はこれに限定されず、1本や3本以上のアーム部を備えることとしてもよい。
【符号の説明】
【0093】
1…基台、2…収容部、5…物体把持装置、6…支持部、7…ベース部、8…アーム部、18…記憶部、50…制御部、51…駆動制御部、52…均衡位置測定部、53…均衡位置推定部、54…アーム種別判定部、55…稼働制御部、70…駆動機構、71…ギアボックス、72…駆動機構位置検出部、73…弾性体、74…アーム軸位置検出部、75…ギア、75a…出力軸、77…モータ、81…アーム、82…基端部、82a…アーム軸、82b…弾性体固定部、83…爪、100…景品取得ゲーム装置。
【特許請求の範囲】
【請求項1】
可動式のベース部に取り付け可能であり、物体を把持するためのアームを含む、1つまたは複数のアーム部と、
前記1つまたは複数のアーム部に対応する1つまたは複数の駆動機構と、
前記アーム部と前記駆動機構とを連結する弾性体と、
前記アーム部が回動する際のアーム軸の位置を検出するアーム軸位置検出部と、
前記駆動機構の位置を検出する駆動機構位置検出部と、
前記アーム軸の位置および前記駆動機構の位置に基づいて、前記駆動機構の駆動を制御する駆動制御部と、
を備えることを特徴とする物体把持装置。
【請求項2】
前記駆動制御部は、予め測定した前記アーム軸の位置に対して均衡する前記駆動機構の出力軸の位置である均衡位置を用いて前記駆動機構の駆動を制御し、前記弾性体は、前記駆動機構の駆動に応じて変形し、前記アーム部は、前記弾性体の変形により付加される力で把持力を発生させることを特徴とする請求項1記載の物体把持装置。
【請求項3】
前記駆動制御部は、前記駆動機構の出力軸の目標位置として、前記均衡位置に予め設定した値を加えた位置を設定し、前記駆動機構の駆動を制御することを特徴とする請求項2記載の物体把持装置。
【請求項4】
前記予め設定した値は、前記アーム軸の複数の位置ごとに設定することを特徴とする請求項3記載の物体把持装置。
【請求項5】
前記均衡位置を測定する均衡位置測定部を、さらに備え、
前記均衡位置測定部は、前記アーム部の回動が停止する位置を用いて前記アーム部の可動範囲を決定し、前記アーム部の可動範囲内における前記均衡位置を測定することを特徴とする請求項2〜4のいずれかに記載の物体把持装置。
【請求項6】
前記均衡位置測定部は、前記アームが異なる種別に交換されるたびに前記均衡位置を測定することを特徴とする請求項5記載の物体把持装置。
【請求項7】
前記アーム部の可動範囲内における前記均衡位置に基づいて、前記アーム部の可動範囲外における前記均衡位置を推定する均衡位置推定部を、さらに備えることを特徴とする請求項5または6記載の物体把持装置。
【請求項8】
前記アーム部の回動動作を急変動させた後の前記アーム軸の位置変化の特性を算出し、予め記憶した既知の前記アームの前記位置変化の特性と比較して前記アームの種別を判定するアーム種別判定部を、さらに備えることを特徴とする請求項1〜7のいずれかに記載の物体把持装置。
【請求項9】
前記アームの種別に基づいて、少なくとも前記ベース部の稼働範囲、稼働速度または稼働方式のいずれか一つを変更する稼働制御部を、さらに備えることを特徴とする請求項8記載の物体把持装置。
【請求項10】
前記アーム部の回動動作を急変動させた後の前記アーム軸の位置変化の特性を算出し、前記アームの重さと重心の偏りを推定する推定部を、さらに備えることを特徴とする請求項1〜7のいずれかに記載の物体把持装置。
【請求項11】
前記アームの重さと重心の偏りに基づいて、少なくとも前記ベース部の稼働範囲、稼働速度または稼働方式のいずれか一つを変更する稼働制御部を、さらに備えることを特徴とする請求項10記載の物体把持装置。
【請求項12】
前記駆動機構は少なくとも電動機を含み、前記駆動制御部は前記電動機の駆動を制御することを特徴とする請求項1〜11のいずれかに記載の物体把持装置。
【請求項13】
請求項1〜12のいずれかに記載の物体把持装置を有する景品取得ゲーム装置。
【請求項1】
可動式のベース部に取り付け可能であり、物体を把持するためのアームを含む、1つまたは複数のアーム部と、
前記1つまたは複数のアーム部に対応する1つまたは複数の駆動機構と、
前記アーム部と前記駆動機構とを連結する弾性体と、
前記アーム部が回動する際のアーム軸の位置を検出するアーム軸位置検出部と、
前記駆動機構の位置を検出する駆動機構位置検出部と、
前記アーム軸の位置および前記駆動機構の位置に基づいて、前記駆動機構の駆動を制御する駆動制御部と、
を備えることを特徴とする物体把持装置。
【請求項2】
前記駆動制御部は、予め測定した前記アーム軸の位置に対して均衡する前記駆動機構の出力軸の位置である均衡位置を用いて前記駆動機構の駆動を制御し、前記弾性体は、前記駆動機構の駆動に応じて変形し、前記アーム部は、前記弾性体の変形により付加される力で把持力を発生させることを特徴とする請求項1記載の物体把持装置。
【請求項3】
前記駆動制御部は、前記駆動機構の出力軸の目標位置として、前記均衡位置に予め設定した値を加えた位置を設定し、前記駆動機構の駆動を制御することを特徴とする請求項2記載の物体把持装置。
【請求項4】
前記予め設定した値は、前記アーム軸の複数の位置ごとに設定することを特徴とする請求項3記載の物体把持装置。
【請求項5】
前記均衡位置を測定する均衡位置測定部を、さらに備え、
前記均衡位置測定部は、前記アーム部の回動が停止する位置を用いて前記アーム部の可動範囲を決定し、前記アーム部の可動範囲内における前記均衡位置を測定することを特徴とする請求項2〜4のいずれかに記載の物体把持装置。
【請求項6】
前記均衡位置測定部は、前記アームが異なる種別に交換されるたびに前記均衡位置を測定することを特徴とする請求項5記載の物体把持装置。
【請求項7】
前記アーム部の可動範囲内における前記均衡位置に基づいて、前記アーム部の可動範囲外における前記均衡位置を推定する均衡位置推定部を、さらに備えることを特徴とする請求項5または6記載の物体把持装置。
【請求項8】
前記アーム部の回動動作を急変動させた後の前記アーム軸の位置変化の特性を算出し、予め記憶した既知の前記アームの前記位置変化の特性と比較して前記アームの種別を判定するアーム種別判定部を、さらに備えることを特徴とする請求項1〜7のいずれかに記載の物体把持装置。
【請求項9】
前記アームの種別に基づいて、少なくとも前記ベース部の稼働範囲、稼働速度または稼働方式のいずれか一つを変更する稼働制御部を、さらに備えることを特徴とする請求項8記載の物体把持装置。
【請求項10】
前記アーム部の回動動作を急変動させた後の前記アーム軸の位置変化の特性を算出し、前記アームの重さと重心の偏りを推定する推定部を、さらに備えることを特徴とする請求項1〜7のいずれかに記載の物体把持装置。
【請求項11】
前記アームの重さと重心の偏りに基づいて、少なくとも前記ベース部の稼働範囲、稼働速度または稼働方式のいずれか一つを変更する稼働制御部を、さらに備えることを特徴とする請求項10記載の物体把持装置。
【請求項12】
前記駆動機構は少なくとも電動機を含み、前記駆動制御部は前記電動機の駆動を制御することを特徴とする請求項1〜11のいずれかに記載の物体把持装置。
【請求項13】
請求項1〜12のいずれかに記載の物体把持装置を有する景品取得ゲーム装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−45204(P2012−45204A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2010−190871(P2010−190871)
【出願日】平成22年8月27日(2010.8.27)
【出願人】(000132471)株式会社セガ (811)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成22年8月27日(2010.8.27)
【出願人】(000132471)株式会社セガ (811)
[ Back to top ]