
物体検出システム、該物体検出システムに用いられる物体検出方法及び物体検出制御プログラム
【課題】レーダから放射される電波に対する反射率が著しく小さいステルス性を有する飛行物体などを検出する物体検出システムを提供する。
【解決手段】レーダ(たとえば、合成開口レーダ11)により、高空から地表方向に所定時間毎に電波が放射されると共に、地表の電波反射率が走査されて観測され、同一場所の電波反射率が複数回(たとえば、2回)ずつ逐次観測される。そして、物体検出手段(たとえば、電子計算機12)で、この観測された同一場所の電波反射率が比較され、各電波反射率に変化がある場合、物体(たとえば、飛行物体P1,P2)が空中に存在することが検出される。
【解決手段】レーダ(たとえば、合成開口レーダ11)により、高空から地表方向に所定時間毎に電波が放射されると共に、地表の電波反射率が走査されて観測され、同一場所の電波反射率が複数回(たとえば、2回)ずつ逐次観測される。そして、物体検出手段(たとえば、電子計算機12)で、この観測された同一場所の電波反射率が比較され、各電波反射率に変化がある場合、物体(たとえば、飛行物体P1,P2)が空中に存在することが検出される。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、物体検出システム、該物体検出システムに用いられる物体検出方法及び物体検出制御プログラムに係り、特に、レーダから放射される電波に対する反射率の著しく小さいステルス(stealth )性を有する航空機のような飛行物体などを検出する場合に用いて好適な物体検出システム、該物体検出システムに用いられる物体検出方法及び物体検出制御プログラムに関する。
【背景技術】
【0002】
電波を利用して物体を検出する装置として、通常、レーダが用いられている。レーダは、指向性のある電波をアンテナから放射し、物体からの反射電波をアンテナで受信して観測し、その観測結果に基づいて、物体の方位及び同アンテナからの距離を計測する機能を有している。
【0003】
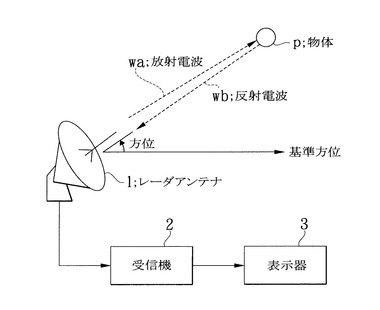
この種の物体検出システムは、たとえば図3に示すように、レーダアンテナ1と、受信機2と、表示器3とから構成されている。この物体検出システムでは、レーダアンテナ1から指向性の強い放射電波Waが放射され、検出対象の物体Pからの反射電波Wbが同レーダアンテナ1で受信される。そして、放射電波Wa及び反射電波Wbの往復時間とレーダアンテナ1の向きに基づいて、物体Pまでの距離及び基準方位に対する方位が測定されて表示器3で表示される。この場合、レーダアンテナ1から物体Pまでの距離Rは、次式で表される。
R=ct/2[m]
ただし、
c;電波の速度(3×108[m/s])
t;放射電波Waのパルスの発射時刻と反射電波Wbの到着時刻との時間差
【0004】
上記の物体検出システムの他、この種の関連する技術としては、たとえば、特許文献1に記載された車載用障害物検出装置がある。
この車載用障害物検出装置では、方向変更部で方位角及び俯角が変更され、送信部からレーダ波が前方の路面に向けて送信され、受信部でレーダ波の反射波が受信される。処理部にて、受信した反射波レベルと予め設定した下限閾値及び上限閾値とが比較され、受信した反射波レベルが下限閾値よりも低いときには障害物が存在すると判定される一方、受信した反射波レベルが上限閾値よりも高いときには物体が存在すると判定される。そして、測定部で物体の形状が測定されて障害物か否かが判定され、障害物が存在すると判定されたときに警告部から警報を出力することにより、走行中の車両前方の路面上の障害物の有無が検出される。
【0005】
また、特許文献2に記載された侵入物体検出システムでは、ミリ波RF部からアンテナ部を介してミリ波が検知エリア内に照射されると共に、反射波が検出される。そして、レーダ部に対して近距離領域に侵入物体が存在している際には、同侵入物体からの直接の反射波が解析されることによって同侵入物体の位置が特定される。また、レーダ部に対して遠距離領域に侵入物体が存在している際には、検知エリア内に設置されている反射物群のうち、検出できない反射物の位置に応じて、同侵入物体の位置が特定される。
【0006】
また、特許文献3に記載された移動目標検出装置では、画像差分処理部により、時刻tにレーダ観測された受信信号の振幅値を示すSAR(Synthetic Aperture Radar、合成開口レーダ)画像Aと時刻t+Δtにレーダ観測された受信信号の振幅値を示すSAR画像Bとの振幅差が目標分布図として算出される。抑圧比算出部により、目標分布図をSAR画像A又はSAR画像Bのいずれかで除算した抑圧比が算出される。目標識別部により、抑圧比を閾値と比較して移動目標が検出される。移動目標検出装置により、抑圧比を閾値と比較することにより、目標分布図を閾値と比較するよりも容易に移動目標が検出され、移動目標の誤検出を減らすことができる。
【特許文献1】特開2001−056377号公報(要約書、図1)
【特許文献2】特開2002−228744号公報(要約書、図1)
【特許文献3】特開2008−164545号公報(要約書、図1)
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上記各文献に記載の装置を含む上記技術では、次のような問題点があった。
すなわち、近年では、レーダアンテナからの放射電波に対する反射率が著しく小さい物体の実現技術が進歩し、通常のレーダでは検出できない航空機などの飛行物体が出現している。この場合、反射電波の強度が小さいため、レーダアンテナで検出されないという問題点がある。このため、放射電波に対する反射率が著しく小さい物体を検出することが可能な物体検出システムが要求されている。
【0008】
また、特許文献1に記載された車載用障害物検出装置は、地上の車両などに搭載される前方の障害物を検出する装置であり、電波やレーザ光の反射率が極端に低い場合に障害物ありと判定する。この方法により空中の飛行物体を検出しようとすると、空中では電波やレーザ光の反射率が極端に低いため、全て障害物と判定されてしまい、空中の飛行物体が検出できないという問題点がある。
【0009】
特許文献2に記載された侵入物体検出システムは、建物内や比較的近距離の野外に固定して用いられ、物体の背後にある反射物からの反射電波が同物体で遮られることにより、同物体が検出されるが、この発明のような比較的遠距離の飛行物体を検出するものではない。
【0010】
特許文献3に記載された移動目標検出装置では、人工衛星などに搭載された合成開口レーダにより、地表方向が2回走査され、電波反射率の変化が観測されて飛行中の航空機などが検出されるが、レーダ波を反射する航空機の通常の検出が行われるものであり、ステルス性の高い航空機を検出するものではない。
【0011】
この発明は、上述の事情に鑑みてなされたもので、レーダから放射される電波に対する反射率が著しく小さいステルス性を有する航空機のような飛行物体などを検出する物体検出システム、該物体検出システムに用いられる物体検出方法及び物体検出制御プログラムを提供することを目的としている。
【課題を解決するための手段】
【0012】
上記課題を解決するために、この発明の第1の構成は、物体検出システムに係り、高空から地表方向に所定時間毎に電波を放射すると共に、地表の電波反射率を走査して観測し、同一場所の前記電波反射率を複数回ずつ逐次観測するレーダと、該レーダで観測された前記同一場所の複数回分の電波反射率を比較し、前記各電波反射率に変化がある場合、物体が存在することを検出する物体検出手段とを備えてなることを特徴としている。
【0013】
この発明の第2の構成は、高空から地表方向に所定時間毎に電波を放射すると共に、地表の電波反射率を走査して観測するレーダを有する物体検出システムに用いられる物体検出方法に係り、前記レーダが、同一場所の前記電波反射率を複数回ずつ逐次観測する電波反射率観測処理と、前記レーダで観測された前記同一場所の複数回分の電波反射率を比較し、前記各電波反射率に変化がある場合、物体が空中に存在することを検出する物体検出処理とを行うことを特徴としている。
【発明の効果】
【0014】
この発明の構成によれば、レーダにより、高空から地表方向に所定時間毎に電波が放射されると共に、地表の電波反射率が走査されて観測され、同一場所の電波反射率が複数回ずつ逐次観測され、この観測された同一場所の電波反射率が比較され、各電波反射率に変化がある場合、物体が存在することが検出されるので、電波反射率の著しく小さいステルス性を有する飛行物体であっても、電波を反射しない特性を利用することにより検出できる。
【発明を実施するための最良の形態】
【0015】
高空から地表方向に所定時間毎に電波を放射すると共に、地表の電波反射率を走査して観測し、同一場所の上記電波反射率を2回ずつ逐次観測する合成開口レーダと、同合成開口レーダで観測された上記同一場所の2回分の電波反射率を比較し、上記各電波反射率に変化がある場合、電波を反射しない飛行物体が空中に存在することを検出する物体検出手段とを備える物体検出システムを提供する。
【0016】
また、この発明では、上記物体検出手段は、地表の位置座標毎の上記電波反射率を1回目の走査と2回目の走査とで比較し、上記電波反射率の変化の比率を算出する構成とされ、かつ、上記物体検出手段で算出された上記電波反射率の変化の比率を表示する表示手段が設けられている。
【0017】
また、この発明では、上記物体検出手段は、上記1回目の走査で得られた上記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、上記2回目の走査で得られた上記電波反射率が上記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置が変化したとき、電波を反射しない飛行物体が空中に存在することを検出する構成とされている。
【0018】
また、この発明では、上記物体検出手段は、上記1回目の走査で得られた上記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、上記2回目の走査で得られた上記電波反射率が上記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置の変化する方向を、上記飛行物体の移動方向として検出する構成とされている。
【0019】
また、この発明では、上記物体検出手段は、上記1回目の走査で得られた上記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、上記2回目の走査で得られた上記電波反射率が上記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置に至る距離を、走査間隔時間で除した値を、上記飛行物体の移動速度として検出する構成とされている。
【0020】
また、この発明では、上記物体検出手段は、上記1回目の走査で得られた上記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の形状と、上記2回目の走査で得られた上記電波反射率が上記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の形状とを比較し、一致している場合に上記飛行物体の形状として判定する構成とされている。
【実施例】
【0021】
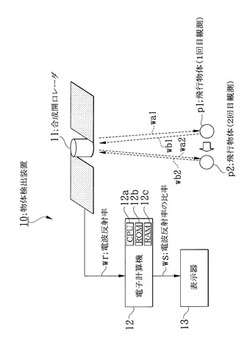
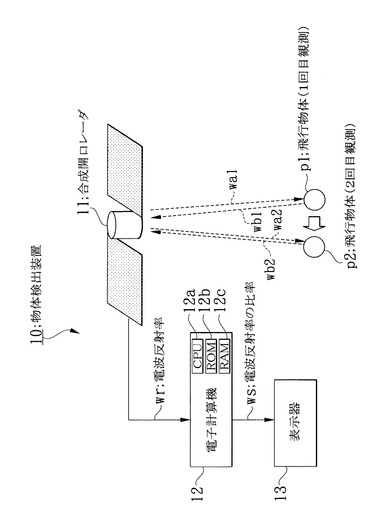
図1は、この発明の一実施例である物体検出システムの要部の電気的構成を示すブロック図である。
この例の物体検出システム10は、同図に示すように、合成開口レーダ11と、電子計算機12と、表示器13とから構成されている。合成開口レーダ11は、たとえば、図示しない航空機に搭載され、高空から地表方向に所定時間(たとえば、1秒)毎に電波を放射すると共に、地表の電波反射率を走査して観測し、同一場所の電波反射率を2回ずつ逐次観測して電波反射率wrとして電子計算機12へ送出する。この場合、合成開口レーダ11は、1回目の観測の対象となる飛行物体P1に放射電波wa1を放射すると共に、同飛行物体P1の反射電波wb1を受信し、この後、2回目の観測の対象となる飛行物体P2に放射電波wa2を放射すると共に、同飛行物体P2の反射電波wb2を受信する。合成開口レーダ11から放射される放射電波wa1,wa2は、たとえば、SHF(Super High Frequency、3〜30GHz)帯、EHF(Extremely High Frequency、30〜300GHz)帯、300〜3000GHz帯など、大気中で吸収されにくい周波数帯に設定されている。
【0022】
電子計算機12は、合成開口レーダ11が搭載されている航空機に搭載され、同電子計算機12全体を制御するコンピュータとしてのCPU(中央処理装置)12a及び同CPU12aを動作させるためのコンピュータ読み取り可能な物体検出制御プログラムが記録されたROM(Read Only Memory)12bを有している。特に、この実施例では、電子計算機12は、合成開口レーダ11で観測された上記同一場所の2回分の電波反射率wrを比較し、各電波反射率wrに変化がある場合、電波を反射しない飛行物体が空中に存在することを検出する。この場合、電子計算機12は、地表の位置座標毎の電波反射率wrをRAM(Random Access Memory)12cに書き込んで1回目の走査と2回目の走査とで比較し、電波反射率wrの変化の比率wsを算出する。
【0023】
また、電子計算機12は、上記1回目の走査で得られた電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、上記2回目の走査で得られた電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置が変化したとき、電波を反射しない飛行物体が空中に存在することを検出する。また、電子計算機12は、上記第1の座標群の位置に対して上記第2の座標群の位置の変化する方向を、飛行物体の移動方向として検出する。また、電子計算機12は、上記第1の座標群から上記第2の座標群に至る距離を、走査間隔時間で除した値を、飛行物体の移動速度として検出する。また、電子計算機12は、上記第1の座標群の形状と、上記第2の座標群の形状とを比較し、一致している場合に、第1又は第2の座標群の形状を飛行物体の形状として判定する。表示器13は、たとえば液晶表示装置などで構成され、また、合成開口レーダ11が搭載されている航空機に搭載され、電子計算機12で算出された前記電波反射率の変化の比率wsを、たとえば色や濃淡で表現することによって表示する。
【0024】
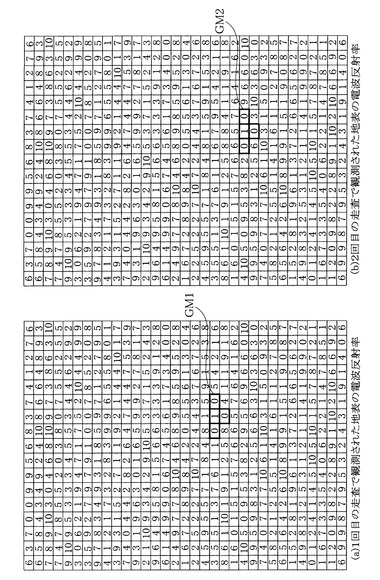
図2は、地表の位置座標毎の電波反射率の観測値の例を示す図であり、同図(a)は合成開口レーダ11による1回目の走査で得られた地表の電波反射率、及び同図(b)が合成開口レーダ11による2回目の走査で得られた地表の電波反射率を示す図である。
この図を参照して、この例の物体検出システムに用いられる物体検出方法の処理内容について説明する。
この物体検出システムでは、合成開口レーダ11により、高空から地表方向に所定時間毎に電波が放射されると共に、地表の電波反射率が走査されて観測され、同一場所の電波反射率が2回ずつ逐次観測される(電波反射率観測処理)。この観測された同一場所の1回目と2回目の電波反射率が比較され、図2(a),(b)に示すように、各電波反射率に変化がある場合、電波を反射しない飛行物体が空中に存在することが検出される(物体検出処理)。
【0025】
この物体検出処理では、合成開口レーダ11から電波反射率wrが電子計算機12に送出されると、同電子計算機12により、地表の位置座標毎の電波反射率が1回目の走査と2回目の走査とで比較され、電波反射率の変化の比率が算出されてRAM12c上にデータとして展開される。そして、この物体検出処理で算出された電波反射率の変化の比率wsが色彩又は濃淡で表示器13で表示される(表示処理)。
【0026】
また、この物体検出処理では、図2(a)に示すように、上記1回目の走査で得られた電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群GM1の位置に対して、図2(b)に示すように、上記2回目の走査で得られた電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群GM2の位置が変化したとき、電波を反射しない飛行物体が空中に存在することが検出される。また、第1の座標群GM1の位置に対して第2の座標群GM2の位置の変化する方向が、飛行物体の移動方向として検出される。また、この物体検出処理では、第1の座標群GM1の位置に対して、第2の座標群GM2の位置に至る距離を走査間隔時間(たとえば、1秒)で除した値が、飛行物体の移動速度として検出される。この場合、電波反射率の低い部分がたとえば時速200Km以上などの高速で移動するとき、電波反射率の低い航空機として検出される。また、この物体検出処理では、第1の座標群GM1の形状と第2の座標群GM2の形状とが比較され、一致している場合に飛行物体の形状として検出される。
【0027】
以上のように、この実施例では、電波反射率の低下に基づいて飛行物体を検出するので、レーダの通常の反射波では検出されない電波反射率の著しく小さい航空機などの飛行物体が検出される。また、合成開口レーダ11から放射される放射電波wa1,wa2は、SHF帯、EHF帯、300〜3000GHz帯など、大気中で吸収されにくい周波数帯に設定されているので、大気の状態や太陽の位置に影響されることなく飛行物体が検出される。また、高分解能の合成開口レーダ11を使用して電波反射率の変化が観測されるので、飛行物体の移動方向、移動速度及び形状が検出される。
【0028】
以上、この発明の実施例を図面により詳述してきたが、具体的な構成は同実施例に限られるものではなく、この発明の要旨を逸脱しない範囲の設計の変更などがあっても、この発明に含まれる。
たとえば、検出の対象となるものは、飛行物体に限定されず、陸上を移動するものや船舶であっても、ステルス性を有するものであれば、上記実施例とほぼ同様の作用、効果が得られる。また、ステルス性を有する物体が検出されたときに、たとえばアラーム音などを発生する警報手段を設けても良い。また、合成開口レーダ11が同一場所の電波反射率を3回以上観測し、それらの観測結果を電子計算機12が解析するようにしても良い。また、合成開口レーダ11に代えて、通常のレーダを用いても良い。ただし、この場合、通常のレーダは、合成開口レーダ11に比較して物体の検出に対する分解能が低いため、比較的近距離にある物体の検出に用いられる。また、合成開口レーダ11は、たとえば人工衛星に搭載されていても良い。この場合、電子計算機12及び表示器13は、地上の観測施設などに設置され、同電子計算機12が合成開口レーダ11と無線接続される。
【産業上の利用可能性】
【0029】
この発明は、レーダから放射される電波に対する反射率が著しく小さい物体を検出する物体検出システム全般に適用できる。
【図面の簡単な説明】
【0030】
【図1】この発明の一実施例である物体検出システムの要部の電気的構成を示すブロック図である。
【図2】地表の位置座標毎の電波反射率の観測値の例を示す図である。
【図3】物体検出システムの要部の電気的構成を示すブロック図である。
【符号の説明】
【0031】
10 物体検出システム
11 合成開口レーダ(レーダ)
12 電子計算機(物体検出手段)
12a CPU(中央処理装置)(物体検出手段の一部)
12b ROM(Read Only Memory)(物体検出手段の一部)
12c RAM(Random Access Memory)(物体検出手段の一部)
13 表示器(表示手段)
P1 飛行物体(1回目に観測される物体)
P2 飛行物体(2回目に観測される物体)
【技術分野】
【0001】
この発明は、物体検出システム、該物体検出システムに用いられる物体検出方法及び物体検出制御プログラムに係り、特に、レーダから放射される電波に対する反射率の著しく小さいステルス(stealth )性を有する航空機のような飛行物体などを検出する場合に用いて好適な物体検出システム、該物体検出システムに用いられる物体検出方法及び物体検出制御プログラムに関する。
【背景技術】
【0002】
電波を利用して物体を検出する装置として、通常、レーダが用いられている。レーダは、指向性のある電波をアンテナから放射し、物体からの反射電波をアンテナで受信して観測し、その観測結果に基づいて、物体の方位及び同アンテナからの距離を計測する機能を有している。
【0003】
この種の物体検出システムは、たとえば図3に示すように、レーダアンテナ1と、受信機2と、表示器3とから構成されている。この物体検出システムでは、レーダアンテナ1から指向性の強い放射電波Waが放射され、検出対象の物体Pからの反射電波Wbが同レーダアンテナ1で受信される。そして、放射電波Wa及び反射電波Wbの往復時間とレーダアンテナ1の向きに基づいて、物体Pまでの距離及び基準方位に対する方位が測定されて表示器3で表示される。この場合、レーダアンテナ1から物体Pまでの距離Rは、次式で表される。
R=ct/2[m]
ただし、
c;電波の速度(3×108[m/s])
t;放射電波Waのパルスの発射時刻と反射電波Wbの到着時刻との時間差
【0004】
上記の物体検出システムの他、この種の関連する技術としては、たとえば、特許文献1に記載された車載用障害物検出装置がある。
この車載用障害物検出装置では、方向変更部で方位角及び俯角が変更され、送信部からレーダ波が前方の路面に向けて送信され、受信部でレーダ波の反射波が受信される。処理部にて、受信した反射波レベルと予め設定した下限閾値及び上限閾値とが比較され、受信した反射波レベルが下限閾値よりも低いときには障害物が存在すると判定される一方、受信した反射波レベルが上限閾値よりも高いときには物体が存在すると判定される。そして、測定部で物体の形状が測定されて障害物か否かが判定され、障害物が存在すると判定されたときに警告部から警報を出力することにより、走行中の車両前方の路面上の障害物の有無が検出される。
【0005】
また、特許文献2に記載された侵入物体検出システムでは、ミリ波RF部からアンテナ部を介してミリ波が検知エリア内に照射されると共に、反射波が検出される。そして、レーダ部に対して近距離領域に侵入物体が存在している際には、同侵入物体からの直接の反射波が解析されることによって同侵入物体の位置が特定される。また、レーダ部に対して遠距離領域に侵入物体が存在している際には、検知エリア内に設置されている反射物群のうち、検出できない反射物の位置に応じて、同侵入物体の位置が特定される。
【0006】
また、特許文献3に記載された移動目標検出装置では、画像差分処理部により、時刻tにレーダ観測された受信信号の振幅値を示すSAR(Synthetic Aperture Radar、合成開口レーダ)画像Aと時刻t+Δtにレーダ観測された受信信号の振幅値を示すSAR画像Bとの振幅差が目標分布図として算出される。抑圧比算出部により、目標分布図をSAR画像A又はSAR画像Bのいずれかで除算した抑圧比が算出される。目標識別部により、抑圧比を閾値と比較して移動目標が検出される。移動目標検出装置により、抑圧比を閾値と比較することにより、目標分布図を閾値と比較するよりも容易に移動目標が検出され、移動目標の誤検出を減らすことができる。
【特許文献1】特開2001−056377号公報(要約書、図1)
【特許文献2】特開2002−228744号公報(要約書、図1)
【特許文献3】特開2008−164545号公報(要約書、図1)
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上記各文献に記載の装置を含む上記技術では、次のような問題点があった。
すなわち、近年では、レーダアンテナからの放射電波に対する反射率が著しく小さい物体の実現技術が進歩し、通常のレーダでは検出できない航空機などの飛行物体が出現している。この場合、反射電波の強度が小さいため、レーダアンテナで検出されないという問題点がある。このため、放射電波に対する反射率が著しく小さい物体を検出することが可能な物体検出システムが要求されている。
【0008】
また、特許文献1に記載された車載用障害物検出装置は、地上の車両などに搭載される前方の障害物を検出する装置であり、電波やレーザ光の反射率が極端に低い場合に障害物ありと判定する。この方法により空中の飛行物体を検出しようとすると、空中では電波やレーザ光の反射率が極端に低いため、全て障害物と判定されてしまい、空中の飛行物体が検出できないという問題点がある。
【0009】
特許文献2に記載された侵入物体検出システムは、建物内や比較的近距離の野外に固定して用いられ、物体の背後にある反射物からの反射電波が同物体で遮られることにより、同物体が検出されるが、この発明のような比較的遠距離の飛行物体を検出するものではない。
【0010】
特許文献3に記載された移動目標検出装置では、人工衛星などに搭載された合成開口レーダにより、地表方向が2回走査され、電波反射率の変化が観測されて飛行中の航空機などが検出されるが、レーダ波を反射する航空機の通常の検出が行われるものであり、ステルス性の高い航空機を検出するものではない。
【0011】
この発明は、上述の事情に鑑みてなされたもので、レーダから放射される電波に対する反射率が著しく小さいステルス性を有する航空機のような飛行物体などを検出する物体検出システム、該物体検出システムに用いられる物体検出方法及び物体検出制御プログラムを提供することを目的としている。
【課題を解決するための手段】
【0012】
上記課題を解決するために、この発明の第1の構成は、物体検出システムに係り、高空から地表方向に所定時間毎に電波を放射すると共に、地表の電波反射率を走査して観測し、同一場所の前記電波反射率を複数回ずつ逐次観測するレーダと、該レーダで観測された前記同一場所の複数回分の電波反射率を比較し、前記各電波反射率に変化がある場合、物体が存在することを検出する物体検出手段とを備えてなることを特徴としている。
【0013】
この発明の第2の構成は、高空から地表方向に所定時間毎に電波を放射すると共に、地表の電波反射率を走査して観測するレーダを有する物体検出システムに用いられる物体検出方法に係り、前記レーダが、同一場所の前記電波反射率を複数回ずつ逐次観測する電波反射率観測処理と、前記レーダで観測された前記同一場所の複数回分の電波反射率を比較し、前記各電波反射率に変化がある場合、物体が空中に存在することを検出する物体検出処理とを行うことを特徴としている。
【発明の効果】
【0014】
この発明の構成によれば、レーダにより、高空から地表方向に所定時間毎に電波が放射されると共に、地表の電波反射率が走査されて観測され、同一場所の電波反射率が複数回ずつ逐次観測され、この観測された同一場所の電波反射率が比較され、各電波反射率に変化がある場合、物体が存在することが検出されるので、電波反射率の著しく小さいステルス性を有する飛行物体であっても、電波を反射しない特性を利用することにより検出できる。
【発明を実施するための最良の形態】
【0015】
高空から地表方向に所定時間毎に電波を放射すると共に、地表の電波反射率を走査して観測し、同一場所の上記電波反射率を2回ずつ逐次観測する合成開口レーダと、同合成開口レーダで観測された上記同一場所の2回分の電波反射率を比較し、上記各電波反射率に変化がある場合、電波を反射しない飛行物体が空中に存在することを検出する物体検出手段とを備える物体検出システムを提供する。
【0016】
また、この発明では、上記物体検出手段は、地表の位置座標毎の上記電波反射率を1回目の走査と2回目の走査とで比較し、上記電波反射率の変化の比率を算出する構成とされ、かつ、上記物体検出手段で算出された上記電波反射率の変化の比率を表示する表示手段が設けられている。
【0017】
また、この発明では、上記物体検出手段は、上記1回目の走査で得られた上記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、上記2回目の走査で得られた上記電波反射率が上記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置が変化したとき、電波を反射しない飛行物体が空中に存在することを検出する構成とされている。
【0018】
また、この発明では、上記物体検出手段は、上記1回目の走査で得られた上記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、上記2回目の走査で得られた上記電波反射率が上記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置の変化する方向を、上記飛行物体の移動方向として検出する構成とされている。
【0019】
また、この発明では、上記物体検出手段は、上記1回目の走査で得られた上記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、上記2回目の走査で得られた上記電波反射率が上記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置に至る距離を、走査間隔時間で除した値を、上記飛行物体の移動速度として検出する構成とされている。
【0020】
また、この発明では、上記物体検出手段は、上記1回目の走査で得られた上記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の形状と、上記2回目の走査で得られた上記電波反射率が上記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の形状とを比較し、一致している場合に上記飛行物体の形状として判定する構成とされている。
【実施例】
【0021】
図1は、この発明の一実施例である物体検出システムの要部の電気的構成を示すブロック図である。
この例の物体検出システム10は、同図に示すように、合成開口レーダ11と、電子計算機12と、表示器13とから構成されている。合成開口レーダ11は、たとえば、図示しない航空機に搭載され、高空から地表方向に所定時間(たとえば、1秒)毎に電波を放射すると共に、地表の電波反射率を走査して観測し、同一場所の電波反射率を2回ずつ逐次観測して電波反射率wrとして電子計算機12へ送出する。この場合、合成開口レーダ11は、1回目の観測の対象となる飛行物体P1に放射電波wa1を放射すると共に、同飛行物体P1の反射電波wb1を受信し、この後、2回目の観測の対象となる飛行物体P2に放射電波wa2を放射すると共に、同飛行物体P2の反射電波wb2を受信する。合成開口レーダ11から放射される放射電波wa1,wa2は、たとえば、SHF(Super High Frequency、3〜30GHz)帯、EHF(Extremely High Frequency、30〜300GHz)帯、300〜3000GHz帯など、大気中で吸収されにくい周波数帯に設定されている。
【0022】
電子計算機12は、合成開口レーダ11が搭載されている航空機に搭載され、同電子計算機12全体を制御するコンピュータとしてのCPU(中央処理装置)12a及び同CPU12aを動作させるためのコンピュータ読み取り可能な物体検出制御プログラムが記録されたROM(Read Only Memory)12bを有している。特に、この実施例では、電子計算機12は、合成開口レーダ11で観測された上記同一場所の2回分の電波反射率wrを比較し、各電波反射率wrに変化がある場合、電波を反射しない飛行物体が空中に存在することを検出する。この場合、電子計算機12は、地表の位置座標毎の電波反射率wrをRAM(Random Access Memory)12cに書き込んで1回目の走査と2回目の走査とで比較し、電波反射率wrの変化の比率wsを算出する。
【0023】
また、電子計算機12は、上記1回目の走査で得られた電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、上記2回目の走査で得られた電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置が変化したとき、電波を反射しない飛行物体が空中に存在することを検出する。また、電子計算機12は、上記第1の座標群の位置に対して上記第2の座標群の位置の変化する方向を、飛行物体の移動方向として検出する。また、電子計算機12は、上記第1の座標群から上記第2の座標群に至る距離を、走査間隔時間で除した値を、飛行物体の移動速度として検出する。また、電子計算機12は、上記第1の座標群の形状と、上記第2の座標群の形状とを比較し、一致している場合に、第1又は第2の座標群の形状を飛行物体の形状として判定する。表示器13は、たとえば液晶表示装置などで構成され、また、合成開口レーダ11が搭載されている航空機に搭載され、電子計算機12で算出された前記電波反射率の変化の比率wsを、たとえば色や濃淡で表現することによって表示する。
【0024】
図2は、地表の位置座標毎の電波反射率の観測値の例を示す図であり、同図(a)は合成開口レーダ11による1回目の走査で得られた地表の電波反射率、及び同図(b)が合成開口レーダ11による2回目の走査で得られた地表の電波反射率を示す図である。
この図を参照して、この例の物体検出システムに用いられる物体検出方法の処理内容について説明する。
この物体検出システムでは、合成開口レーダ11により、高空から地表方向に所定時間毎に電波が放射されると共に、地表の電波反射率が走査されて観測され、同一場所の電波反射率が2回ずつ逐次観測される(電波反射率観測処理)。この観測された同一場所の1回目と2回目の電波反射率が比較され、図2(a),(b)に示すように、各電波反射率に変化がある場合、電波を反射しない飛行物体が空中に存在することが検出される(物体検出処理)。
【0025】
この物体検出処理では、合成開口レーダ11から電波反射率wrが電子計算機12に送出されると、同電子計算機12により、地表の位置座標毎の電波反射率が1回目の走査と2回目の走査とで比較され、電波反射率の変化の比率が算出されてRAM12c上にデータとして展開される。そして、この物体検出処理で算出された電波反射率の変化の比率wsが色彩又は濃淡で表示器13で表示される(表示処理)。
【0026】
また、この物体検出処理では、図2(a)に示すように、上記1回目の走査で得られた電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群GM1の位置に対して、図2(b)に示すように、上記2回目の走査で得られた電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群GM2の位置が変化したとき、電波を反射しない飛行物体が空中に存在することが検出される。また、第1の座標群GM1の位置に対して第2の座標群GM2の位置の変化する方向が、飛行物体の移動方向として検出される。また、この物体検出処理では、第1の座標群GM1の位置に対して、第2の座標群GM2の位置に至る距離を走査間隔時間(たとえば、1秒)で除した値が、飛行物体の移動速度として検出される。この場合、電波反射率の低い部分がたとえば時速200Km以上などの高速で移動するとき、電波反射率の低い航空機として検出される。また、この物体検出処理では、第1の座標群GM1の形状と第2の座標群GM2の形状とが比較され、一致している場合に飛行物体の形状として検出される。
【0027】
以上のように、この実施例では、電波反射率の低下に基づいて飛行物体を検出するので、レーダの通常の反射波では検出されない電波反射率の著しく小さい航空機などの飛行物体が検出される。また、合成開口レーダ11から放射される放射電波wa1,wa2は、SHF帯、EHF帯、300〜3000GHz帯など、大気中で吸収されにくい周波数帯に設定されているので、大気の状態や太陽の位置に影響されることなく飛行物体が検出される。また、高分解能の合成開口レーダ11を使用して電波反射率の変化が観測されるので、飛行物体の移動方向、移動速度及び形状が検出される。
【0028】
以上、この発明の実施例を図面により詳述してきたが、具体的な構成は同実施例に限られるものではなく、この発明の要旨を逸脱しない範囲の設計の変更などがあっても、この発明に含まれる。
たとえば、検出の対象となるものは、飛行物体に限定されず、陸上を移動するものや船舶であっても、ステルス性を有するものであれば、上記実施例とほぼ同様の作用、効果が得られる。また、ステルス性を有する物体が検出されたときに、たとえばアラーム音などを発生する警報手段を設けても良い。また、合成開口レーダ11が同一場所の電波反射率を3回以上観測し、それらの観測結果を電子計算機12が解析するようにしても良い。また、合成開口レーダ11に代えて、通常のレーダを用いても良い。ただし、この場合、通常のレーダは、合成開口レーダ11に比較して物体の検出に対する分解能が低いため、比較的近距離にある物体の検出に用いられる。また、合成開口レーダ11は、たとえば人工衛星に搭載されていても良い。この場合、電子計算機12及び表示器13は、地上の観測施設などに設置され、同電子計算機12が合成開口レーダ11と無線接続される。
【産業上の利用可能性】
【0029】
この発明は、レーダから放射される電波に対する反射率が著しく小さい物体を検出する物体検出システム全般に適用できる。
【図面の簡単な説明】
【0030】
【図1】この発明の一実施例である物体検出システムの要部の電気的構成を示すブロック図である。
【図2】地表の位置座標毎の電波反射率の観測値の例を示す図である。
【図3】物体検出システムの要部の電気的構成を示すブロック図である。
【符号の説明】
【0031】
10 物体検出システム
11 合成開口レーダ(レーダ)
12 電子計算機(物体検出手段)
12a CPU(中央処理装置)(物体検出手段の一部)
12b ROM(Read Only Memory)(物体検出手段の一部)
12c RAM(Random Access Memory)(物体検出手段の一部)
13 表示器(表示手段)
P1 飛行物体(1回目に観測される物体)
P2 飛行物体(2回目に観測される物体)
【特許請求の範囲】
【請求項1】
高空から地表方向に所定時間毎に電波を放射すると共に、地表の電波反射率を走査して観測し、同一場所の前記電波反射率を複数回ずつ逐次観測するレーダと、
該レーダで観測された前記同一場所の複数回分の電波反射率を比較し、前記各電波反射率に変化がある場合、物体が存在することを検出する物体検出手段とを備えてなることを特徴とする物体検出システム。
【請求項2】
高空から地表方向に所定時間毎に電波を放射すると共に、地表の電波反射率を走査して観測し、同一場所の前記電波反射率を2回ずつ逐次観測する合成開口レーダと、
該合成開口レーダで観測された前記同一場所の2回分の電波反射率を比較し、前記各電波反射率に変化がある場合、電波を反射しない飛行物体が空中に存在することを検出する物体検出手段とを備えてなることを特徴とする物体検出システム。
【請求項3】
前記物体検出手段は、
地表の位置座標毎の前記電波反射率を1回目の走査と2回目の走査とで比較し、前記電波反射率の変化の比率を算出する構成とされ、かつ、
前記物体検出手段で算出された前記電波反射率の変化の比率を表示する表示手段が設けられていることを特徴とする請求項2記載の物体検出システム。
【請求項4】
前記物体検出手段は、
前記1回目の走査で得られた前記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、前記2回目の走査で得られた前記電波反射率が前記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置が変化したとき、電波を反射しない飛行物体が空中に存在することを検出する構成とされていることを特徴とする請求項3記載の物体検出システム。
【請求項5】
前記物体検出手段は、
前記1回目の走査で得られた前記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、前記2回目の走査で得られた前記電波反射率が前記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置の変化する方向を、前記飛行物体の移動方向として検出する構成とされていることを特徴とする請求項3又は4記載の物体検出システム。
【請求項6】
前記物体検出手段は、
前記1回目の走査で得られた前記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、前記2回目の走査で得られた前記電波反射率が前記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置に至る距離を、走査間隔時間で除した値を、前記飛行物体の移動速度として検出する構成とされていることを特徴とする請求項3又は4記載の物体検出システム。
【請求項7】
前記物体検出手段は、
前記1回目の走査で得られた前記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の形状と、前記2回目の走査で得られた前記電波反射率が前記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の形状とを比較し、一致している場合に前記飛行物体の形状として判定する構成とされていることを特徴とする請求項3記載の物体検出システム。
【請求項8】
高空から地表方向に所定時間毎に電波を放射すると共に、地表の電波反射率を走査して観測するレーダを有する物体検出システムに用いられる物体検出方法であって、
前記レーダが、同一場所の前記電波反射率を複数回ずつ逐次観測する電波反射率観測処理と、
前記レーダで観測された前記同一場所の複数回分の電波反射率を比較し、前記各電波反射率に変化がある場合、物体が空中に存在することを検出する物体検出処理とを行うことを特徴とする物体検出方法。
【請求項9】
高空から地表方向に所定時間毎に電波を放射すると共に、地表の電波反射率を走査して観測する合成開口レーダを有する物体検出システムに用いられる物体検出方法であって、
前記合成開口レーダが、同一場所の前記電波反射率を2回ずつ逐次観測する電波反射率観測処理と、
前記合成開口レーダで観測された前記同一場所の2回分の電波反射率を比較し、前記各電波反射率に変化がある場合、電波を反射しない飛行物体が空中に存在することを検出する物体検出処理とを行うことを特徴とする物体検出方法。
【請求項10】
前記物体検出処理では、
地表の位置座標毎の前記電波反射率を1回目の走査と2回目の走査とで比較し、前記電波反射率の変化の比率を算出し、
前記物体検出処理で算出された前記電波反射率の変化の比率を表示する表示処理を行うことを特徴とする請求項9記載の物体検出方法。
【請求項11】
前記物体検出処理では、
前記1回目の走査で得られた前記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、前記2回目の走査で得られた前記電波反射率が前記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置が変化したとき、電波を反射しない飛行物体が空中に存在することを検出することを特徴とする請求項10記載の物体検出方法。
【請求項12】
前記物体検出処理では、
前記1回目の走査で得られた前記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、前記2回目の走査で得られた前記電波反射率が前記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置の変化する方向を、前記飛行物体の移動方向として検出することを特徴とする請求項11記載の物体検出方法。
【請求項13】
前記物体検出処理では、
前記1回目の走査で得られた前記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、前記2回目の走査で得られた前記電波反射率が前記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置に至る距離を走査間隔時間で除することにより、前記飛行物体の移動速度として検出することを特徴とする請求項11記載の物体検出方法。
【請求項14】
前記物体検出処理では、
前記1回目の走査で得られた前記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の形状と、前記2回目の走査で得られた前記電波反射率が前記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の形状とを比較し、一致している場合に前記飛行物体の形状として検出することを特徴とする請求項11記載の物体検出方法。
【請求項15】
コンピュータを請求項1乃至7のいずれか一に記載の物体検出手段として機能させるためのコンピュータ読み取り可能な物体検出制御プログラム。
【請求項1】
高空から地表方向に所定時間毎に電波を放射すると共に、地表の電波反射率を走査して観測し、同一場所の前記電波反射率を複数回ずつ逐次観測するレーダと、
該レーダで観測された前記同一場所の複数回分の電波反射率を比較し、前記各電波反射率に変化がある場合、物体が存在することを検出する物体検出手段とを備えてなることを特徴とする物体検出システム。
【請求項2】
高空から地表方向に所定時間毎に電波を放射すると共に、地表の電波反射率を走査して観測し、同一場所の前記電波反射率を2回ずつ逐次観測する合成開口レーダと、
該合成開口レーダで観測された前記同一場所の2回分の電波反射率を比較し、前記各電波反射率に変化がある場合、電波を反射しない飛行物体が空中に存在することを検出する物体検出手段とを備えてなることを特徴とする物体検出システム。
【請求項3】
前記物体検出手段は、
地表の位置座標毎の前記電波反射率を1回目の走査と2回目の走査とで比較し、前記電波反射率の変化の比率を算出する構成とされ、かつ、
前記物体検出手段で算出された前記電波反射率の変化の比率を表示する表示手段が設けられていることを特徴とする請求項2記載の物体検出システム。
【請求項4】
前記物体検出手段は、
前記1回目の走査で得られた前記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、前記2回目の走査で得られた前記電波反射率が前記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置が変化したとき、電波を反射しない飛行物体が空中に存在することを検出する構成とされていることを特徴とする請求項3記載の物体検出システム。
【請求項5】
前記物体検出手段は、
前記1回目の走査で得られた前記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、前記2回目の走査で得られた前記電波反射率が前記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置の変化する方向を、前記飛行物体の移動方向として検出する構成とされていることを特徴とする請求項3又は4記載の物体検出システム。
【請求項6】
前記物体検出手段は、
前記1回目の走査で得られた前記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、前記2回目の走査で得られた前記電波反射率が前記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置に至る距離を、走査間隔時間で除した値を、前記飛行物体の移動速度として検出する構成とされていることを特徴とする請求項3又は4記載の物体検出システム。
【請求項7】
前記物体検出手段は、
前記1回目の走査で得られた前記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の形状と、前記2回目の走査で得られた前記電波反射率が前記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の形状とを比較し、一致している場合に前記飛行物体の形状として判定する構成とされていることを特徴とする請求項3記載の物体検出システム。
【請求項8】
高空から地表方向に所定時間毎に電波を放射すると共に、地表の電波反射率を走査して観測するレーダを有する物体検出システムに用いられる物体検出方法であって、
前記レーダが、同一場所の前記電波反射率を複数回ずつ逐次観測する電波反射率観測処理と、
前記レーダで観測された前記同一場所の複数回分の電波反射率を比較し、前記各電波反射率に変化がある場合、物体が空中に存在することを検出する物体検出処理とを行うことを特徴とする物体検出方法。
【請求項9】
高空から地表方向に所定時間毎に電波を放射すると共に、地表の電波反射率を走査して観測する合成開口レーダを有する物体検出システムに用いられる物体検出方法であって、
前記合成開口レーダが、同一場所の前記電波反射率を2回ずつ逐次観測する電波反射率観測処理と、
前記合成開口レーダで観測された前記同一場所の2回分の電波反射率を比較し、前記各電波反射率に変化がある場合、電波を反射しない飛行物体が空中に存在することを検出する物体検出処理とを行うことを特徴とする物体検出方法。
【請求項10】
前記物体検出処理では、
地表の位置座標毎の前記電波反射率を1回目の走査と2回目の走査とで比較し、前記電波反射率の変化の比率を算出し、
前記物体検出処理で算出された前記電波反射率の変化の比率を表示する表示処理を行うことを特徴とする請求項9記載の物体検出方法。
【請求項11】
前記物体検出処理では、
前記1回目の走査で得られた前記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、前記2回目の走査で得られた前記電波反射率が前記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置が変化したとき、電波を反射しない飛行物体が空中に存在することを検出することを特徴とする請求項10記載の物体検出方法。
【請求項12】
前記物体検出処理では、
前記1回目の走査で得られた前記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、前記2回目の走査で得られた前記電波反射率が前記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置の変化する方向を、前記飛行物体の移動方向として検出することを特徴とする請求項11記載の物体検出方法。
【請求項13】
前記物体検出処理では、
前記1回目の走査で得られた前記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の位置に対して、前記2回目の走査で得られた前記電波反射率が前記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の位置に至る距離を走査間隔時間で除することにより、前記飛行物体の移動速度として検出することを特徴とする請求項11記載の物体検出方法。
【請求項14】
前記物体検出処理では、
前記1回目の走査で得られた前記電波反射率が地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第1の座標群の形状と、前記2回目の走査で得られた前記電波反射率が前記地表の電波反射率よりも低く、かつ互いに隣接する複数の座標からなる第2の座標群の形状とを比較し、一致している場合に前記飛行物体の形状として検出することを特徴とする請求項11記載の物体検出方法。
【請求項15】
コンピュータを請求項1乃至7のいずれか一に記載の物体検出手段として機能させるためのコンピュータ読み取り可能な物体検出制御プログラム。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2010−85329(P2010−85329A)
【公開日】平成22年4月15日(2010.4.15)
【国際特許分類】
【出願番号】特願2008−256754(P2008−256754)
【出願日】平成20年10月1日(2008.10.1)
【出願人】(599161890)NECネットワーク・センサ株式会社 (71)
【Fターム(参考)】
【公開日】平成22年4月15日(2010.4.15)
【国際特許分類】
【出願日】平成20年10月1日(2008.10.1)
【出願人】(599161890)NECネットワーク・センサ株式会社 (71)
【Fターム(参考)】
[ Back to top ]