
物体検出装置および物体の検出方法
【課題】レーダ装置の検知範囲に含まれている物体を、その物体の移動速度に関わらず検知する。
【解決手段】実施形態に係る物体検出装置は、送信部、受信部、移動物体検出部、および、微動物体検出部を備える。送信部は、レーダパルスを送信する。受信部は、物体からのレーダパルスの反射波を受信する。移動物体検出部は、受信部が第1の時間の間に受信した受信信号を解析することにより、移動している移動物体を検出する。微動物体検出部は、第1の時間よりも長い第2の時間の間に、受信部が受信した受信信号を解析することにより移動物体に比べて移動量が微小な微動物体を検出する。
【解決手段】実施形態に係る物体検出装置は、送信部、受信部、移動物体検出部、および、微動物体検出部を備える。送信部は、レーダパルスを送信する。受信部は、物体からのレーダパルスの反射波を受信する。移動物体検出部は、受信部が第1の時間の間に受信した受信信号を解析することにより、移動している移動物体を検出する。微動物体検出部は、第1の時間よりも長い第2の時間の間に、受信部が受信した受信信号を解析することにより移動物体に比べて移動量が微小な微動物体を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダを用いた物体検出装置と、物体の検出方法に関する。
【背景技術】
【0002】
近年、超広帯域(Ultra-Wideband、UWB)レーダ装置を用いた物体の検出が行われてきている。UWBレーダ装置では、広帯域にわたる様々な周波数の電波が送受信される。このため、例えば、コンクリートや木材等の非金属を透過する波長の電波の送受信が可能なUWBレーダ装置を用いて、壁越しに物体を検出することができる。
【0003】
また、UWBレーダを含む種々のレーダ装置を用いた移動物体の検出も行われている。関連する技術として、短時間フーリエ変換を用いて、小さな移動物体を検出する装置も知られている。この装置は、受信信号を短時間フーリエ変換により時間−周波数軸上の信号に変換し、得られた信号の極大値の時間軸方向の所定の範囲について信号の強度を加算する。さらに、加算により得られた値が閾値を超えたかの判定結果に基づいて、目標が検出されたかが判定される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−256409号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、高速で移動する移動物体の検出を行うレーダ装置では、移動速度が遅い物体が検出されないという問題がある。このため、複数の移動物体がレーダ装置の検知範囲に存在しても、移動物体の移動速度の差が大きい場合は、検知範囲に含まれている全ての移動物体を検知することができないという問題があった。また、背景技術の欄では、UWBレーダについて述べているが、他のレーダ装置を用いたシステムでも、送信したレーダパルスの反射波を用いて目標までの距離と角度を計測する場合には、移動速度が異なる物体を検知できない場合がある。
【0006】
本発明は、レーダ装置の検知範囲に含まれている物体を、その物体の移動速度に関わらず検知することを目的とする。
【課題を解決するための手段】
【0007】
実施形態に係る物体検出装置は、送信部、受信部、移動物体検出部、および、微動物体検出部を備える。送信部は、レーダパルスを送信する。受信部は、物体からの前記レーダパルスの反射波を受信する。移動物体検出部は、前記受信部が第1の時間の間に受信した受信信号を解析することにより、移動している移動物体を検出する。微動物体検出部は、前記第1の時間よりも長い第2の時間の間に、前記受信部が受信した受信信号を解析することにより前記移動物体に比べて移動量が微小な微動物体を検出する。
【発明の効果】
【0008】
レーダ装置の検知範囲に含まれている個々の移動物体は、その移動速度に関わらず検知される。
【図面の簡単な説明】
【0009】
【図1】第1の実施形態にかかる物体検出装置の構成の例を示す図である。
【図2】受信部で行われる処理の例を説明する図である。
【図3】データ集録部で生成されるベースバンドデジタル信号の例を示す図である。
【図4】経時変化取得部の処理の例を説明する図である。
【図5】レンジビンごとの受信強度の経時変化と計算部の動作の例を説明する図である。
【図6】計算部の動作の例を説明する図である。
【図7】周波数バンクでの受信強度の合計値の例を示す図である。
【図8A】移動物体検出部で行われる処理の例を説明するフローチャートである。
【図8B】移動物体検出部で行われる処理の例を説明するフローチャートである。
【図9】ベースバンドデジタル信号の例を示す図である。
【図10】微動物体検出部での処理の例を説明する図である。
【図11】レンジビンごとの合計値の例を示す図である。
【図12A】微動物体検出部の動作の例を説明するフローチャートである。
【図12B】微動物体検出部の動作の例を説明するフローチャートである。
【図13】移動物体角度計算部が保持するデータの例を示すテーブルである。
【図14】目標の位置を特定する方法の例を説明する図である。
【図15】表示部での表示例を示す図である。
【図16】移動物体の後ろに静止物体がある場所で移動物体と微動物体を捕捉した場合の例を説明する図である。
【図17】第2の実施形態に係る物体検出装置の構成の例を示す図である。
【図18】周波数スペクトルの例を示す図である。
【図19】計算部が微動物体の検出に用いる周波数領域の例を説明する図である。
【図20】検出部の動作の例を説明する図である。
【図21A】微動物体検出部の動作の例を説明するフローチャートである。
【図21B】微動物体検出部の動作の例を説明するフローチャートである。
【図21C】微動物体検出部の動作の例を説明するフローチャートである。
【図22】微動物体判定部が取得したデータの例を示すテーブルである。
【図23】微動物体判定部で行われる判定の例を説明するフローチャートである。
【図24】第3の実施形態に係る物体検出装置の構成の例を示す図である。
【図25】微動物体判定部が取得したデータの例を示すテーブルである。
【図26】第4の実施形態に係る物体検出装置の構成の例を示す図である。
【発明を実施するための形態】
【0010】
<第1の実施形態>
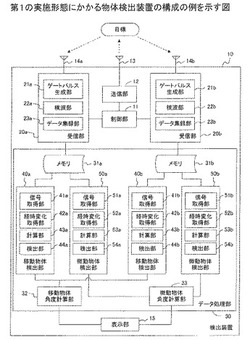
図1は、第1の実施形態にかかる物体検出装置10の構成の例を示す図である。図1では、受信アンテナ14と受信部20を2つ備えている物体検出装置10の例を示しているが、物体検出装置10に備えられる受信アンテナ14や受信部20などの数は、1つ以上の任意の数に変更される場合がある。
【0011】
物体検出装置10は、制御部11、送信部12、送信アンテナ13、受信アンテナ14(14a、14b)、受信部20(20a、20b)、表示部15、およびデータ処理部30を備える。受信部20は、ゲートパルス生成部21(21a、21b)、検波部22(22a、22b)、データ集録部23(23a、23b)を備える。データ処理部30は、メモリ31、移動物体検出部40、微動物体検出部50、移動物体角度計算部32および微動物体角度計算部33を備える。移動物体検出部40は、信号取得部41、経時変化取得部42、計算部43、検出部44を備える。微動物体検出部50は、信号取得部51、経時変化取得部52、計算部53、検出部54を備える。
【0012】
制御部11は、レーダパルス(送信パルス)を送信するタイミングの調整に用いられる信号を生成し、送信部12に出力する。また、制御部11は、目標に照射されたレーダパルスの反射波を受信するタイミングなどを調整するために用いられる信号も生成し、受信部20に出力する。例えば、等価時間サンプリング方式によりベースバンド信号が生成される場合、制御部11は、送信クロック信号、受信クロック信号、受信トリガ信号を生成する。受信クロック信号の周波数は、送信クロック信号の周波数と異なる周波数であるものとする。例えば、受信クロック信号の周波数は、送信クロック信号の周波数に比べて20Hz程度低いことがある。また、受信トリガ信号は、送信クロック信号の周波数と受信クロック信号の周波数との差の逆数の周波数の信号であるものとする。すなわち、送信クロック信号の周波数(ft)で受信クロック信号の周波数が(fr)であるとすると、受信トリガ信号の周波数は1/(ft−fr)の絶対値となる。制御部11は、送信クロック信号を送信部12に出力する。また、制御部11は、受信クロック信号をゲートパルス生成部21に出力し、受信トリガ信号をデータ集録部23に出力する。
【0013】
送信部12は、送信クロック信号を受け取ると、送信クロック信号で指定されるタイミングに合わせてレーダパルスを、目標に送信する。レーダパルスは、送信アンテナ13を介して目標に送信される。ここで、目標は、レーダパルスの覆域に存在する物体であり、移動している物体や静止している物体などが含まれる場合がある。
【0014】
以下の説明では、歩行者や車両など移動している物体を「移動物体」と記載する。また、座っている人間、立っている人間、樹木などでは、呼吸や姿勢の変化、あるいは、風などによる形状の変動などの動きが観測されるが、移動量が移動物体に比べて微小である。このような物体を以下の説明では、「微動物体」と記載することがある。なお、微動物体の移動量には、呼吸や姿勢の変化量、風などによる形状の変動量も含まれる。さらに、壁や家具などのように移動しない物体を「静止物体」と記載することもある。
【0015】
送信部12から送信されたレーダパルスは目標で反射し、受信アンテナ14a、14bは、反射波を受信する。受信アンテナ14a、14bで受信された受信信号からベースバンド信号を取得する方法の例を、図2を参照しながら説明する。
【0016】
図2は、受信部20で行われる処理の例を説明する図である。図2は、送信クロック信号の周波数が受信クロック信号の周波数よりも高い場合の例を示している。図2(a)に示すタイミングで送信されたレーダパルスは目標で反射する。ここで、受信信号は、送信パルス信号が目標で反射することにより得られた信号であるので、送信クロック信号と同じ周波数の波形に近似できる。受信信号の例を図2(b)に示す。
【0017】
制御部11からゲートパルス生成部21に受信クロック信号が入力されると、ゲートパルス生成部21は、ゲートパルス信号を生成する。ゲートパルス生成部21は、図2(c)に示すように、ゲートパルス信号の立ち上がりと、受信クロック信号の入力が一致するように信号を生成する。ゲートパルス生成部21は、生成したゲートパルス信号を検波部22に出力する。
【0018】
検波部22は、受信信号の強度を、ゲートパルス信号で指定された期間にわたって取得する。ここで、ゲートパルス信号と受信クロック信号の立ち上がりが一致していて、送信クロック信号の周波数と受信クロック信号の周波数は異なっているので、ゲートパルス信号の立ち上がり位置は、図2(a)と図2(c)に示すように、送信クロックの周期とずれる。一方、図2(b)に示すように、受信信号の周期は送信クロックの周期と一致している。このため、検波部22によって受信強度が取得される期間は、ゲートパルス信号と送信クロックの周期とのずれの大きさの変動に伴って、受信信号の周期の中で変動する。すなわち、検波部22は、ゲートパルス信号に合わせて受信信号の強度を取得することにより、サンプル位置をずらしながら複数回にわたって受信信号の強度をサンプリングする。図2(d)に、検波部22が取得した信号の例を示す。検波部22は、取得した信号の強度をデータ集録部23に出力する。
【0019】
データ集録部23は、検波部22から取得したデータを、個々のデータが取得されたときの送信クロック周期と受信クロックの周期のずれの大きさの小さい順に並べることにより、図2(e)に示すようなベースバンドアナログ信号を生成する。ここで、ベースバンドアナログ信号は、受信トリガ信号が出力されてから次の受信トリガ信号が出力されるまでの間に、検波部22によって取得された受信信号の強度の変化を表す。受信トリガ信号は、送信クロック信号の周期と受信トリガ信号の周期が一致するタイミングを通知する信号である。従って、ベースバンドアナログ信号は、受信信号を受信トリガ信号の周波数と同じ周波数になるように時間方向に伸張した信号となる。
【0020】
ベースバンドアナログ信号は受信信号を伸張した信号であるので、受信アンテナ14に到達した反射波の強度を、送信アンテナ13から目標を介した受信アンテナ14までの距離の関数に変換できる。ベースバンドアナログ信号の強度は、あるパルスが送信されてからそのパルスの反射波が受信されるまでの間に送信されたUWBが進むことができる距離に対応付けられる。例えば、送信クロック信号によるパルスの繰り返し周波数が10MHzである場合、光速が3×108(m/s)であるので、3×108(m/s)/10MHzより、受信波は、送信アンテナ13から30m以下の距離を進んで受信アンテナ14に到達する。つまり、送信クロック信号が10MHzのレーダパルスを用いた場合、1つのベースバンドデジタル信号は、送信アンテナ13から目標を介した受信アンテナ14までの距離が30m以下の様々な値となる反射波を受信することにより得られる信号であると考えられる。
【0021】
さらに、データ集録部23は、ベースバンドアナログ信号をデジタル化して、ベースバンドデジタル信号を生成する。前述のとおり、ベースバンドアナログ信号は距離の関数に変換できるので、デジタル化の際のサンプリング数により、物体検出装置10の距離分解能が変動する。以下の記載では、分かりやすくするために、1つのベースバンドデジタル信号中での強度は、距離の関数として表現する。
【0022】
データ集録部23は、生成したベースバンドデジタル信号をメモリ31に出力する。また、検波部22から入力されたデータのうちで、すでに出力されたベースバンドデジタル信号の生成に用いられたデータを廃棄する。なお、以下の説明で、ベースバンドデジタル信号が生成される周期を「ベースバンド周期」と記載することがある。ベースバンド周期は、受信トリガ信号の周期と同じである。
【0023】
図3は、データ集録部23aで生成されるベースバンドデジタル信号の例を示す図である。図3(a)は、時刻T1にデータ集録部23aから出力されたベースバンドデジタル信号の強度を示す。図3(a)の横軸は、送信アンテナ13から目標を介して受信アンテナ14aに到達するまでの距離を表す。なお、図3(a)の横軸のメモリは、レンジビン単位である。ここで、レンジビンは、距離を算出する際の最小処理単位である。
【0024】
ベースバンドデジタル信号は、受信トリガ信号がデータ集録部23aに入力されるたびにメモリ31aに出力される。時刻Tn(nは1以上の整数)に受信トリガ信号がデータ集録部23aに入力されたとすると、時刻Tnに対応付けて、ベースバンドデジタル信号が1つずつメモリ31aに出力される。ここでは、時刻T2に図3(b)、時刻T3に図3(c)のベースバンドデジタル信号がメモリ31aに出力され、時刻T9に図3(d)の信号が出力されたとする。なお、受信アンテナ14b、受信部20b、およびメモリ31bの動作も、図2と図3を参照して説明した処理と同様である。
【0025】
次に、移動物体検出部40の動作について説明する。移動物体検出部40は、例えば、歩いている人間などの移動物体を検出するために用いられる。移動物体検出部40は、解析を開始する開始時間から第1の時間が経過するまでの間に得られたベースバンドデジタル信号を解析する。第1の時間は、移動物体が1つの計測位置を通過するまでにかかる時間以下の時間である。以下、歩いている人間が移動物体の場合を例として、第1の時間の上限値の計算方法を示す。人が移動するときの速度を時速4km/h程度とすると、次式より、秒速1.1m/sとなる。
4000m/(60分×60秒)=1.1m
【0026】
移動物体が、歩いている人の場合、人間のレンジ方向の寸法や手足の動きを考慮すると、移動物体の大きさは約0.5mとなる。従って、ある測定位置を人間が通過するまでにかかる時間は、次式より約0.45秒となる。
0.5(m)/1.1(m/S)=0.4545秒
そこで、歩いている人を検出する場合、第1の時間の上限値は約0.45秒である。第1の時間は、0.45秒以下で、移動物体検出部40が処理しやすい数のベースバンドデジタル信号が得られる時間に設定される。例えば、ベースバンド周期が0.05秒である場合、第1の時間の上限値が0.45秒であれば、0.45(s)/0.05(s)=9より、第1の時間の上限値までに9個のベースバンドデジタル信号が生成される。検出の開始時刻にベースバンドデジタル信号が生成されているとすると、検出の開始時刻から第1の時間の上限が経過するまでの間に10個のベースバンドデジタル信号が生成される。従って、移動物体検出部40が1回の検出処理に用いることができるベースバンドデジタル信号の数は10以下である。以下に説明するように、移動物体検出部40での処理では、フーリエ変換が用いられるため、1度の検出処理で用いられるベースバンドデジタル信号の数は、2の累乗の値であることが好ましい。以下の説明では、1回の検出に用いるベースバンドデジタル信号の数は、例えば、上限値までに生成されるベースバンドデジタル信号の数以下で、最も大きな2の累乗値に設定されているものとする。信号取得部41は、予め、1回の検出処理に用いるベースバンドデジタル信号の数を記憶している。また、オペレータが、第1の時間を求めて、信号取得部41に第1の時間を記憶させることもできる。信号取得部41は、第1の時間の間に生成されたベースバンドデジタル信号をメモリ31から取得する。
【0027】
経時変化取得部42は、開始時刻から第1の時間が経過するまでの受信信号の強度の経時変化を、レンジビンごとに求める。計算部43は、経時変化の波形を周波数スペクトルに変換する。さらに、計算部43は、周波数スペクトルでの周波数が正の値をとるデータの強度の合計値を計算する。検出部44は、計算部43で得られた合計値を、移動物体検出閾値と比較して、移動物体を介した送信アンテナ13から受信アンテナ14までの距離を求める。また、検出部44は、予め、移動物体検出閾値や、捕捉する対象の大きさを記憶している。そこで、検出部44は、計算部43から複数の距離が算出された場合に、得られた距離は同一の移動物体に対応するかを確認する。移動物体検出部40、経時変化取得部42、計算部43、検出部44で行われる処理については、後で詳しく説明する。
【0028】
微動物体検出部50は、座っている人間などの微動物体を検出する。移動物体検出部40は、解析を開始する開始時間から第2の時間が経過するまでの間に得られたベースバンドデジタル信号を解析する。第2の時間は、微動物体の動きの検出に用いられる数のベースバンドデジタル信号が生成されるのにかかる時間以上の時間である。また、第2の時間は、第1の時間よりも長い時間である。第2の時間を決定するためには基準値が用いられ、この基準値は、微動物体の動きの周波数と、微動物体の動きの観測回数の積に応じて決定される。例えば、座っている人や立っている人の体の揺れの周期が約3秒である場合、揺れの周波数は0.3Hz程度である。例えば、0.3Hzの周波数の動きを、微動物体検出部50は、20周期の間観測するとする。すると、0.3Hz×20回=6秒より、第2の時間を求めるための基準値は6秒となる。
【0029】
例えば、第2の時間の基準値が6秒でベースバンド周期が0.05秒である場合、第2の時間の基準値の間に生成されるベースバンドデジタル信号の数は、6(s)/0.05(s)=120となる。検出の開始時刻にベースバンドデジタル信号が生成されているとすると、検出の開始時刻から第2の時間の基準値が経過するまでの間に121個のベースバンドデジタル信号が生成されていることになる。オペレータは、予め、第2の時間の基準値で生成されるベースバンドデジタル信号の数に近い値に、微動物体検出部50が1回の検出処理に用いるベースバンドデジタル信号の数を設定し、信号取得部51に記憶させる。後述するように、微動物体検出部50での処理でも、フーリエ変換が用いられるため、微動物体検出部50が1度の検出処理に用いるベースバンドデジタル信号の数は、2の累乗の値であることが好ましい。以下の説明では、微動物体検出部50が1度の検出に用いるベースバンドデジタル信号の数は、2の累乗値のうちで、基準値の間に得られるベースバンドデジタル信号の数に近い値に設定されているものとする。従って、第2の時間は、微動物体検出部50が処理しやすい数のベースバンドデジタル信号を取得することができる時間で、かつ、基準値に近い値である。さらに、オペレータは、微動物体検出部50が1回の検出に用いるベースバンドデジタル信号の数とベースバンド周期から第2の時間を算出し、信号取得部51に記憶させることができる。信号取得部51は、記憶している数以上のベースバンドデジタル信号がメモリ31に記憶されていると、ベースバンドデジタル信号を取得する。
【0030】
経時変化取得部52は、開始時刻から第2の時間が経過するまでの受信信号の強度の経時変化を、レンジビンごとに求める。計算部53は、経時変化取得部52で求められた経時変化の波形を周波数スペクトルに変換する。さらに、計算部53は、予め決められた周波数の範囲において周波数スペクトルの強度の合計値を計算する。検出部54は、合計値と微動物体検出閾値の比較結果に基づいて、目標を介した送信アンテナ13から受信アンテナ14までの距離を求める。検出部54は、予め、微動物体検出閾値や捕捉する対象の大きさを記憶している。検出部54は、計算部53から複数の距離が算出された場合に、同一の微動物体が複数回検出されている可能性があるかを確認する。微動物体検出部50、経時変化取得部52、計算部53、検出部54で行われる処理については、後で詳しく説明する。
【0031】
移動物体角度計算部32は、移動物体検出部40aで得られた距離と、移動物体検出部40bで得られた距離を取得する。移動物体角度計算部32は、取得した距離を用いて、物体検出装置10から見た移動物体の方向を計算する。例えば、移動物体角度計算部32は、受信アンテナ14aと受信アンテナ14bを結ぶ直線と、送信アンテナ13と移動物体とを結ぶ直線がなす角度を計算する。移動物体角度計算部32は、検出された移動物体の各々について、送信アンテナ13から移動物体までの距離も計算する。移動物体角度計算部32は、計算結果を表示部15に出力する。移動物体角度計算部32で行われる計算については、後で詳しく述べる。
【0032】
微動物体角度計算部33は、微動物体検出部50aで得られた距離と、微動物体検出部50bで得られた距離を取得する。さらに、微動物体角度計算部33は、取得された距離を用いて、物体検出装置10から見た微動物体の方向を計算する。例えば、微動物体角度計算部33は、受信アンテナ14aと受信アンテナ14bを結ぶ直線と、送信アンテナ13と微動物体とを結ぶ直線がなす角度を計算する。さらに、微動物体角度計算部33は、送信アンテナ13と微動物体の間の距離も計算する。微動物体角度計算部33は、計算結果を表示部15に出力する。微動物体角度計算部33で行われる計算についても、後で詳しく述べる。
【0033】
表示部15は、移動物体角度計算部32と微動物体角度計算部33から得られたデータを表示する。表示部15は、例えば、ディスプレイなど、データをユーザに視覚的に提示することができる任意の装置である。
【0034】
〔移動物体の検出〕
以下、移動物体検出部40で行われる移動物体の検出について説明する。この例では、移動物体検出部40が1度に処理するベースバンドデジタル信号の数は8個である。また、第1の時間は、ベースバンド周期が0.05秒であるので、0.05秒×(8−1)回=0.35秒とする。ここで、検出の開始時刻にベースバンドデジタル信号が生成されているので、第1の時間は、7回のベースバンド周期となる。
【0035】
例えば、図3に示すようなベースバンドデジタル信号がメモリ31aに格納されているとする。
(1)信号取得部41は、メモリ31に記憶されているベースバンドデジタル信号の数と、移動物体検出部40で行われる1回の検出処理に用いられるベースバンドデジタル信号の数を比較する。メモリ31に記憶されているベースバンドデジタル信号の数が1回の検出処理に用いられるベースバンドデジタル信号の数未満であれば、信号取得部41は待機する。ここでは、1回の検出に8個のベースバンドデジタル信号が用いられるので、信号取得部41は、時刻T1から時刻T7まで待機する。時刻T8になると8個のベースバンドデジタル信号がメモリ31に記憶されるので、信号取得部41は、時刻T1を処理の開始時刻とし、時刻T8を検出時間とする。
【0036】
(2)信号取得部41は、開始時刻から第1の時間が経過するまでに生成されたベースバンドデジタル信号を取得する。図4(a)は、移動物体検出部40が8個のベースバンドデジタル信号を用いて検出を行う場合に取得されるベースバンドデジタル信号の例を示す。図4(a)に示すように、信号取得部41は、時刻T1〜T8に生成された8つのベースバンドデジタル信号を取得する。
【0037】
(3)経時変化取得部42は、検出に用いられるベースバンドデジタル信号について、レンジビンごとの受信強度の経時変化を求める。例えば、経時変化取得部42は、図4(a)に示す8つのベースバンドデジタル信号から、図4(b)の太線に示すように、レンジビンごとの受信強度の経時変化を求める。図5(a)は、レンジビンR1〜R9の9つのレンジビンでの受信強度の経時変化の例を示す。図5の例では、レンジビンR5での受信強度が他のレンジビンでの受信強度よりも高くなっている。なお、各レンジビンで得られた受信強度には、移動物体から反射したレーダの強度と、静止物体から反射したレーダの強度の両方が含まれている。
【0038】
(4)計算部43は、経時変化取得部42により得られた経時変化を、レンジビンごとにフーリエ変換する。すなわち、計算部43は、経時変化の波形に含まれている周波数の成分ごとの強度を示す周波数スペクトルを、レンジビンごとに生成する。ここで、周波数スペクトルに含まれる周波数の上限は、ベースバンドデジタル信号の生成される周波数であり、周波数の下限はベースバンドデジタル信号が生成される周波数に−1をかけた値となる。例えば、ベースバンドデジタル信号が0.05秒ごとに生成される場合、計算部43は、−20Hzから20Hzの範囲にわたる周波数スペクトルを生成する。また、フーリエ変換を行うときのポイント数によって、周波数バンクの大きさは変動する。ここで、周波数バンクは、周波数スペクトルに含まれる周波数の範囲をポイント数で割った値であり、フーリエ変換が行われたポイント間の周波数の差を示す。例えば、−20Hzから20Hzの範囲にわたる周波数スペクトルについて8ポイントのフーリエ変換が行われる場合、周波数バンクは、5Hzになる。
【0039】
図5(b)に計算部43によって生成された周波数スペクトルの例を示す。図5(b)に示すように、レンジビンR1〜R9のいずれでも、0Hzを中心として線対称な周波数スペクトルが得られる。−5〜0Hzの周波数バンクと、0〜5Hzの周波数バンクは、静止物体から反射したレーダの強度を含んでいる。
【0040】
(5)計算部43は、各レンジビンの周波数スペクトルについて、0Hzを含む周波数バンクを除いて、予め決められた周波数バンクでの強度を合計して合計値を求める。ここで、合計値を求めるために用いる周波数バンクの範囲は任意に変更することができ、合計される周波数バンクの数や周波数の範囲に応じて移動物体検出閾値の値が決定される。
【0041】
図6は、計算部43の動作の例を説明する図である。図6は、正の周波数の周波数バンクでの受信強度の合計値を求める場合の例を示している。例えば、図6に示す各レンジビンでの周波数スペクトルについて、計算部43は、予め決められた範囲63(63a〜63i)で示した部分の受信強度の合計値を求めるとする。計算部43は、得られた結果を検出部44に出力する。
【0042】
(6)検出部44は、各レンジビンについて得られた合計値を移動物体検出閾値と比較し、合計値が移動物体検出閾値以上のレンジビンがあれば、そのレンジビンに対応する位置で移動物体が検出されていると判定する。例えば、図7に、予め決められた周波数バンクでの受信強度の合計値の例を示す。図7では、レンジビンR5での合計値が移動物体検出閾値を上回っている。この場合、検出部44は、送信アンテナ13から移動物体を介して受信アンテナ14aに到達するまでの距離はレンジビンR5で表される距離であると判定する。検出部44は、レンジビンの番号を記憶する。なお、検出部44は、レンジビンの番号に基づいて、送信アンテナ13から移動物体を介した受信アンテナ14aまでの距離を求めて、得られた距離を記憶することもできる。
【0043】
検出部44は、予め、捕捉対象の移動物体の大きさを記憶しているものとする。計算部43において、複数のレンジビンの番号が通知された場合、移動物体の大きさと、通知されたレンジビン同士の距離を比較する。通知されたレンジビン同士の距離が、捕捉対象の移動物体の大きさ以下である場合、検出部44は、1つの移動物体が検出されたと判定し、複数のレンジビンでのデータを適宜、マージする。例えば、レンジビンR4とR5で移動物体が見られたと計算部43から通知されたとする。もし、移動物体の大きさが2つのレンジビンにまたがる大きさであれば、計算部43は、検出された移動物体は1つであると判定する。この場合、レンジビンR4とR5のうち、受信強度の合計値が大きい方のレンジビンで移動物体が検出されたと判定し、受信強度の合計値が小さい方についてのデータを破棄する。
【0044】
一方、通知された2つのレンジビン同士の距離が、捕捉対象の移動物体の大きさよりも大きい場合、検出部44は、2つの移動物体が検出されたと判定する。この場合、検出部44は、計算部43から通知された2つのデータの双方を格納し、適宜、移動物体角度計算部32に出力する。ここで、出力される検出結果は、時刻T8での検出結果として扱われる。検出部44は、移動物体角度計算部32に出力したデータを、廃棄する。このため、検出部44は、1回の検出で得られたデータを記憶することはあるが、複数の検出の結果を記憶することは無い。例えば、時刻T1〜T8での検出結果は、検出部44が時刻T8での検出結果を移動物体角度計算部32に出力するまでは検出部44に格納されている。しかし、時刻T2〜T9のベースバンドデジタル信号が処理されるときは、検出部44は、時刻T1〜T8での検出結果を記憶していない。
【0045】
メモリ31aから取得されたベースバンドデジタル信号を用いた検出が終わると、移動物体検出部40は、取得したベースバンドデジタル信号のうち、最も早い時刻に生成された信号を廃棄する。さらに、移動物体検出部40は、前回取得したベースバンドデジタル信号のうちで最後に生成された信号の次に生成された信号を、メモリ31aから取得して、検出を継続する。例えば、時刻T1〜T8に生成されたベースバンドデジタル信号を用いた検出処理が終わると、移動物体検出部40は、時刻T1に生成されたベースバンドデジタル信号を廃棄して、時刻T9に生成されたベースバンドデジタル信号を取得する。その後、移動物体検出部40では、時刻T2〜T9に生成されたベースバンドデジタル信号を用いた検出処理が行われる。また、以上の説明は、受信アンテナ14aから受信された信号に基づいた移動物体検出部40aについて述べたが、移動物体検出部40bは、受信アンテナ14bからの信号を用いて移動物体検出部40aと同様の処理を行う。なお、移動物体検出部40は、検出結果の出力が終わると、取得したベースバンドデジタル信号を全て廃棄して、新たに処理対象の時刻のベースバンドデジタル信号を取得しても良い。
【0046】
図8Aと図8Bは、移動物体検出部で行われる処理の例を説明するフローチャートである。なお、図8Aと図8Bに示すフローチャートは一例であって、例えば、ステップS13とS14の順番が入れ替えられるなど、移動物体検出部40で行われる処理は、実装に応じて適宜、変更される場合がある。また、図8Aと図8Bは、移動物体検出部40が検出後に取得したベースバンドデジタル信号を全て廃棄して、新たに処理対象の時刻の信号を取得する場合の動作を説明している。定数Nは、フーリエ変換のポイント数である。変数tは、検出時刻を示す。変数nは、取得されたベースバンドデジタル信号の数の計数に用いられる。変数rは、処理されるレンジビンの番号を表す。変数tnは、1回の処理で検出された移動物体の数の計数に用いられる。
【0047】
移動物体の検出が開始されると、信号取得部41は、変数nを0、変数tをNに設定する(ステップS1)。信号取得部41は、メモリ31からt−n番目のベースバンドデジタル信号を取得し、nの値を1つインクリメントする(ステップS2、S3)。さらに、信号取得部41は、変数nがN未満かを確認する(ステップS4)。変数nがN未満の場合、ステップS2〜S4の処理が繰り返される。一方、変数tがN以上の場合、信号取得部41はベースバンドデジタル信号の取得を中止して、それまでに取得したベースバンドデジタル信号を経時変化取得部42に出力する。
【0048】
経時変化取得部42は、変数rを1に設定する(ステップS5)。さらに、経時変化取得部42は、信号取得部41から入力されたベースバンドデジタル信号のr番目のレンジビンでの信号の強度を読み取り、信号強度の経時変化を求める(ステップS6)。経時変化取得部42は、r番目のレンジビンでの強度の経時変化を表すデータを計算部43に出力する。計算部43は、r番目のレンジビンでの強度の経時変化をフーリエ変換し、経時変化の波形を基にした周波数スペクトルを生成する(ステップS7)。計算部43は、r番目のレンジビンの周波数スペクトルについて、0Hzを含む周波数バンクを除く周波数バンクでの強度の合計値を計算し、格納する(ステップS8、S9)。その後、計算部43は、rを1つインクリメントして、レンジビンの最大値(range_max)と比較する(ステップS10、S11)。rがレンジビンの最大値より大きくなるまで、ステップS6〜S11の処理が繰り返される。
【0049】
変数rがレンジビンの最大値より大きくなると、検出部44は、格納されている合計値を取得し、変数rを再度、1に設定する(ステップS12、S13)。検出部44は、変数tnを1に設定する(ステップS14)。検出部44は、r番目のレンジビンでの合計値と移動物体検出閾値を比較する(ステップS15)。合計値が移動物体検出閾値よりも大きい場合、検出部44は、移動物体の数tnが2未満であるかを確認する(ステップS15でYes、ステップS16)。移動物体の数が2未満である場合、検出部44は、1番目の移動物体のデータとして計算部43から得られたデータを記憶する(ステップS18)。さらに、検出部44は、変数tnを1つインクリメントする(ステップS19)。
【0050】
一方、移動物体の数が2以上である場合、検出部44は、tn番目の移動物体とtn−1番目に検出された移動物体との間の距離を算出し、両者の距離が捕捉しようとする移動物体の大きさより大きいかを判定する(ステップS17)。両者の距離が捕捉しようとする移動物体の大きさよりも大きい場合、検出部44は、tn番目の移動物体が検出されたと判定してデータを格納する(ステップS17でYes、ステップS18)。検出部44は、さらに、変数tnを1つインクリメントする(ステップS19)。ステップS17で、tn番目の移動物体とtn−1番目に検出された移動物体との間の距離が捕捉しようとする移動物体の大きさより小さいと判定されると、検出部44は、tn番目の移動物体とtn−1番目に検出された移動物体をマージする(ステップS17でNo)。
【0051】
ステップS15〜S19の処理が終わると、検出部44は、rの値を1つインクリメントしてからレンジビンの最大値と比較する(ステップS20、S21)。rがレンジビンの最大値より大きくなるまで、ステップS15〜S21の処理が繰り返される。
【0052】
rがレンジビンの最大値より大きくなると、検出部44は、現在取得されているベースバンドデジタル信号処理は終わったと判断して、その旨を信号取得部41に通知する。信号取得部41は、tの値をメモリ31に記録されているベースバンドデジタル信号の総数(t_max)と比較する(ステップS22)。tの値がt_maxよりも大きい場合、全てのデータの処理が終わっているので、移動物体検出部40の処理は終了する(ステップS22でYes)。一方、tの値がt_max以下の場合、検出部44は、ステップS18で移動物体と判定された物体が検出されたレンジビンの番号を、時刻tでの検出結果として移動物体角度計算部32に出力する(ステップS23)。さらに、信号取得部41は、現在のtの値1つインクリメントし、変数nを0に変更する(ステップS24)。ステップS22において、tの値がt_maxよりも大きいと判定されるまで、ステップS2〜ステップS24の処理が繰り返される。ステップS2〜S24の処理の繰り返しにより、移動物体の位置の変化の軌跡が求められ、移動物体の追跡が行われる。
【0053】
〔微動物体の検出〕
次に、微動物体の検出方法について説明する。ここでは、受信部20aで時刻T1〜T9に生成されたベースバンドデジタル信号は、図3に示すような信号であるものとする。さらに、時刻T10には図9(a)、時刻T11には図9(b)に示すベースバンドデジタル信号が生成され、時刻T128には図9(c)、時刻T129には図9(d)に示すようなベースバンドデジタル信号が生成されたとする。この場合、メモリ31aには、時刻T1〜T9までの図3(a)〜図3(d)のベースバンドデジタル信号と、時刻T10以降の図9(a)〜図9(d)に示すベースバンドデジタル信号が記憶されている。ここでは、微動物体検出部50が1度に処理するベースバンドデジタル信号の数は128個であるものとする。また、ベースバンド周期が0.05秒であるものとする。すると、第2の時間は、128個のベースバンドデジタル信号を取得することができるように、ベースバンド周期の127倍、すなわち、0.05秒×127回=6.35秒とする。
【0054】
(1)メモリ31aに記憶されているベースバンドデジタル信号の数が微動物体検出部50aでの1回の検出処理に用いられるベースバンドデジタル信号の数になるまで、信号取得部51aは待機する。ここでは、微動物体検出部50aでの1回の検出に128個のベースバンドデジタル信号が用いられるので、信号取得部41aは、時刻T128まで待機する。時刻T128になると信号取得部51は、時刻T1を処理の開始時刻とし、時刻T128を検出時間とする。
【0055】
(2)信号取得部51aは、開始時刻から第2の時間が経過するまでに生成されたベースバンドデジタル信号を取得する。この処理により、信号取得部51aは、1回の検出に用いる数のベースバンドデジタル信号をメモリ31aから取得する。ここでは、微動物体検出部50aは、図3と図9(a)〜図9(c)に示すベースバンドデジタル信号を含む128個のベースバンドデジタル信号を取得する。
【0056】
(3)経時変化取得部52aは、信号取得部51aで取得されたベースバンドデジタル信号について、レンジビンごとの受信強度の経時変化を求める。経時変化取得部52aで行われる経時変化の求め方は、経時変化取得部42での経時変化の求め方と同様である。得られた経時変化の例を図10(a)に示す。図3に示したように、時刻T1などでは一部のレンジビンで、移動物体からの反射による受信強度の上昇が見られるが、経時変化取得部52aでは、時刻T1〜T128などの長い時間の経時変化が取得されるため、移動物体の影響は小さくなっている。つまり、経時変化取得部52aで得られた経時変化の波形は、微動物体の移動による反射波の変化と、静止物体からの反射波の影響を大きく受けているといえる。
【0057】
(4)計算部53aは、経時変化取得部52aにより得られた経時変化をレンジビンごとにフーリエ変換することにより、レンジビンごとの周波数スペクトルを生成する。なお、計算部43により生成される周波数スペクトルと同様に、周波数スペクトルに含まれる周波数の上限は、ベースバンドデジタル信号が生成される周波数であり、周波数の下限はベースバンドデジタル信号が生成される周波数に−1をかけた値となる。また、フーリエ変換を行うときのポイント数によって、周波数バンクの大きさは変動する。例えば、計算部53が128ポイントのフーリエ変換により−20Hzから20Hzの範囲の周波数スペクトルを生成すると、周波数バンクは0.3125Hzとなる。
【0058】
(5)計算部53aは、各レンジビンの周波数スペクトルについて、0Hzを含む周波数バンクを除いて、予め決められた周波数バンクでの強度を合計して合計値を求める。ここで、微動物体による動作が観測される周波数が予め予測できている場合、計算部53aは、予測される周波数の範囲の周波数バンクの強度の合計値を求める。例えば、計算部53aは、第1の閾値よりも低い周波数の周波数バンクでの強度の合計値を求めることができる。ここで、第1の閾値は、例えば、微動物体の動作の周波数の上限値とされる。なお、計算部53aは、予め、第1の閾値や合計値を求める周波数バンクを記憶しているものとする。図10(b)の例では、計算部53aは、周波数範囲60(60a〜60i)の周波数バンクでの強度の合計値を計算するものとする。図11に、レンジビンごとの合計値の例を示す。計算部53aは、検出部54aに得られた結果を出力する。
【0059】
(6)検出部54aは、各レンジビンについて得られた合計値を、微動物体検出閾値と比較する。微動物体検出閾値は、微動物体の検出に用いられる合計値の大きさを表す。検出部54aは、合計値が微動物体検出閾値以上であれば、微動物体が検出されたと判定する。図11の例では、レンジビンR4〜R6で合計値が微動物体検出閾値を超えているので、レンジビンR4〜R6に微動物体が検出される。
【0060】
検出部54aは、複数のレンジビンで微動物体が検出されると、微動物体が検出されたレンジビンの番号から、微動物体が検出された位置の間の距離を求める。さらに、捕捉される微動物体の大きさと微動物体が検出された位置の距離を比較し、検出された微動物体が1つであるか、複数であるかを判定する。この判定方法は、検出部44と同様である。
【0061】
検出部54aは、微動物体の検出結果を微動物体角度計算部33に出力する。さらに、検出部54aは、微動物体角度計算部33に出力したデータを、廃棄する。このため、検出部54aは、1回の検出で得られたデータを記憶することはあるが、複数の検出の結果を記憶することは無い。例えば、時刻T1〜T128での検出結果は、検出部54aが時刻T128での検出結果を微動物体角度計算部33に出力するまでは検出部54aに格納されている。しかし、時刻T2〜T129のベースバンドデジタル信号が処理されるときは、検出部54aは、時刻T1〜T128での検出結果を記憶していない。
【0062】
なお、ここでは、微動物体検出部50aの動作について説明したが、微動物体検出部50bもメモリ31bに格納されているベースバンドデジタル信号について、微動物体検出部50aと同様に処理する。
【0063】
図12Aと図12Bは、微動物体検出部50の動作の例を説明するフローチャートである。信号取得部51は、計算部53で行われるフーリエ変換のポイント数(N2)と同数のベースバンドデジタル信号を用いて微動物体を検出するものとする。また、変数tmは、1回の検出処理で検出される微動物体の数の計数に用いられる。
【0064】
微動物体の検出が開始されると、信号取得部51は、変数tをN2に設定し、変数nを0に設定する(ステップS31)。信号取得部51は、t−n番目のベースバンドデジタル信号を取得して、nを1つインクリメントする(ステップS32、S33)。信号取得部51は、nとN2の値を比較し、nがN2以上になるまでベースバンドデジタル信号の取得を繰り返す(ステップS34)。
【0065】
nがN2以上になると、経時変化取得部52は、変数rを1に設定する(ステップS35)。その後、経時変化取得部52は、r番目のレンジで観測された信号強度の経時変化を取得し、計算部53に出力する(ステップS36)。計算部53は、入力された経時変化の波形をフーリエ変換して周波数スペクトルを生成し、微動物体の動作の周波数を含む範囲の周波数バンクの強度の合計値を求め、記憶する(ステップS37〜S39)。次に、計算部53は、rを1つインクリメントして、レンジビンの番号の最大値(range_max)と比較する(ステップS40、S41)。全てのレンジビンについて合計値が求められるまで、ステップS36〜S41の処理が繰り返される。
【0066】
変数rがレンジビンの番号の最大値より大きくなると、検出部54は、各レンジビンについて求められた合計値を取得し、変数rを1に設定する(ステップS42、S43)。検出部54は、tmの値を1に設定する(ステップS44)。検出部54は、合計値を微動物体検出閾値と比較する(ステップS45)。合計値が微動物体検出閾値より大きい場合、検出部54は、変数tmの値が2未満であるかを確認する(ステップS46)。tmが2以上の場合、複数のレンジビンで微動物体が検出されているので、検出部54は、捕捉する微動物体の大きさと、微動物体が検出されたレンジビンの間の距離を比較し、複数のレンジビンで検出された微動物体は同一であるかを確認する(ステップS47)。微動物体が検出されたレンジビン同士の距離が微動物体の大きさより大きい場合、検出部54は、tm番目の微動物体が検出されたと判定してtmの値を1つインクリメントする(ステップS48、S49)。その後、検出部54は、rの値をインクリメントする(ステップS50)。一方、微動物体が検出されたレンジビン同士の距離が微動物体の大きさ以下の場合、ステップS48、S49の処理は行われずに次のレンジビンが処理対象となる(ステップS47でNo、ステップS50)。その後、検出部54は、rの値をレンジビンの番号の最大値と比較する(ステップS51)。検出部54は、全てのレンジビンについてステップS45〜S51の動作を行う。一方、合計値が微動物体検出閾値以下の場合、ステップS46〜S49の処理が行われずに、ステップS50以下の処理が行われる(ステップS45でNo)。
【0067】
信号取得部51は、tの値をメモリ31に記憶されているベースバンドデジタル信号の総数(t_max)と比較する(ステップS52)。変数tの値がt_max以下の場合、信号取得部51は、現在の処理で得られた結果を微動物体角度計算部33に出力する(ステップS53)。さらに、変数tの値を1つインクリメントし、変数nを0に変更する(ステップS54)。変数tの値がt_maxを超えるまで、ステップS31〜S54の処理が繰り返される。ステップS31〜S54の処理の繰り返しにより、微動物体が存在する時間の長さや位置の変動などの、微動物体の存在位置の変化の軌跡が求められ、微動物体の追跡が行われる。
【0068】
〔目標の位置の特定〕
移動物体角度計算部32は、移動物体検出部40a、40bから入力されたデータに基づいて、移動物体の位置を特定する。上記の例では、移動物体角度計算部32は、時刻T8のベースバンドデジタル信号が処理されてから、ベースバンド周期ごとに移動物体検出部40からデータを受け取り、移動物体の位置を特定する。
【0069】
一方、微動物体角度計算部33は、微動物体検出部50a、50bから入力されたデータに基づいて、微動物体の位置を特定する。上記の例では、微動物体角度計算部33は、時刻T128のベースバンドデジタル信号が処理されてから、ベースバンド周期ごとに微動物体検出部50からデータを受け取り、微動物体の位置を特定する。従って、時刻T1〜T127のベースバンドデジタル信号が処理されている間は、移動物体だけが検出され、時刻T128以降のベースバンドデジタル信号が処理されると、移動物体と微動物体の両方が検出される。最初に移動物体と微動物体の両方が検出されるとき、移動物体検出部40では、時刻T121〜T128のベースバンドデジタル信号に基づいて得られたデータが処理され、微動物体検出部50では、時刻T1〜T128のベースバンドデジタル信号に基づいて得られたデータが処理される。
【0070】
以下、移動物体角度計算部32で行われる処理を詳しく説明する。なお、微動物体角度計算部33が微動物体の位置を特定する際に行う処理は、移動物体角度計算部32が移動物体の位置を特定する際に行う処理と同様である。
【0071】
図13は、移動物体角度計算部32が保持するデータの例を示すテーブルである。移動物体角度計算部32は、データの通し番号と、アンテナ番号、距離を保持する。アンテナ番号は、受信アンテナ14aと14bのいずれで受信された受信波に基づいて検出された距離であるかを表す。ここでは、受信アンテナ14aでの受信波に基づいて得られた距離についてはアンテナ番号を1とし、受信アンテナ14bでの受信波に基づいて得られた距離についてはアンテナ番号を2とするものとする。従って、移動物体角度計算部32は、移動物体検出部40aから入力された距離に、アンテナ番号=1を対応付ける。一方、移動物体検出部40bから入力された距離に対して、移動物体角度計算部32は、アンテナ番号=2を対応付ける。
【0072】
図14は、目標の位置を特定する方法の例を説明する図である。図14の例では、送信アンテナ13から目標65にレーダパルスが送信され、目標65からの反射波が受信アンテナ14a、14bで受信されているものとする。移動物体検出部40aからで求められた距離は、目標65を介した送信アンテナ13から受信アンテナ14aまでの距離であるので、L1である。一方、移動物体検出部40bでは、目標65を介した送信アンテナ13から受信アンテナ14bまでの距離が求められるので、移動物体検出部40bではL2が求められる。また、送信アンテナ13と受信アンテナ14aの間の距離をd1、送信アンテナ13と受信アンテナ14bの間の距離をd2とする。従って、図14に含まれている数値のうち、L1、L2、d1、d2は、測定可能な数値である。
【0073】
図14に示すように、送信アンテナ13から目標65までの距離をD1、受信アンテナ14aから目標65までの距離をD2、受信アンテナ14bから目標65までの距離をD3とする。さらに、受信アンテナ14aと受信アンテナ14bを結ぶ直線と、送信アンテナ13と目標65を結ぶ直線がなす角度をθとする。移動物体角度計算部32は、図13のテーブル中の2つの距離の値を用いて、移動物体について、θとD1の値を求める。
【0074】
まず、移動物体角度計算部32は、移動物体検出部40aから入力された距離と移動物体検出部40bから入力された距離のうち、同一の移動物体を介した距離の組み合わせを決定する。同一の目標65について、L1の長さとL2の長さの差は、2つの受信アンテナ14の間の距離(d1+d2)よりも小さくなる。すなわち、以下の関係が成り立つ。
【0075】
【数1】

【0076】
例えば、d1+d2の値が0.5mだとする。図13のNo.1のデータは、受信アンテナ14aでの受信波の処理により3.0mという距離が得られている。また、No.2のデータは、受信アンテナ14bでの受信波の処理結果から3.1mという値が得られている。この場合、No.1とNo.2の組み合わせは(1)式の関係を満たすので、移動物体角度計算部32は、No.1とNo.2のデータは同一の移動物体に基づいて得られたと判定する。同様の処理により、図13のテーブルでは、以下の3つの移動物体が検出されていると判定される。
a) No.1とNo.2のデータの組み合わせで特定される移動物体
b) No.3とNo.4のデータの組み合わせで特定される移動物体
c) No.3とNo.5のデータの組み合わせで特定される移動物体
ここで、No.3のデータは2回使用されているが、この場合は、送信アンテナ13の位置と受信アンテナ14aの位置を焦点とした楕円上に2つの移動物体があると判定されている。
【0077】
以下、データの組み合わせを用いて移動物体の位置を特定するための計算について述べる。図14の図に示すように、L1、L2、D1、D2、D3の間には、(2)式と(3)式の関係が成り立つ。
【0078】
【数2】
【0079】
【数3】
【0080】
また、図14の三角形Aより(4)式が成り立つ。
【数4】
【0081】
同様に、図14の三角形Bより、(5)式が成り立つ。
【数5】
【0082】
(2)式と(3)式を変形すると、次のようになる
【数6】
【0083】
【数7】
【0084】
(6)式を(4)式に代入して変形すると以下のようになる。
【数8】
【0085】
【数9】
【0086】
また、(7)式を(5)式に代入して変形すると、以下のようになる。
【0087】
【数10】
【0088】
【数11】
【0089】
(9)式と(11)式より、
【数12】
【0090】
【数13】
従って、(13)式を(9)式もしくは(11)式に代入することによりD1が算出される。移動物体角度計算部32は、D1とθを表示部15に出力する。
【0091】
表示部15は、D1とθを用いて移動物体の位置をディスプレイに表示する。また、表示部15は、移動物体の位置を、xy座標などの他の座標系に変換して表示することもできる。微動物体角度計算部33も、移動物体角度計算部32と同様に微動物体検出部50a、50bから入力されたデータを処理して、微動物体と送信アンテナ13の間の距離と、微動物体と送信アンテナ13を結ぶ直線が2つのアンテナを結ぶ直線となす角度を算出する。また、微動物体角度計算部33も、得られた結果を表示部15に出力する。表示部15は、微動物体についても、移動物体と同様にディスプレイに位置を表示する。
【0092】
図15に、表示部15での表示例を示す。図15(a)では、物体検出装置10は、壁1を透過して、壁1の反対側にある移動物体と微動物体を検出する場合の例を示しているが、物体検出装置10は、壁透過レーダを備えたレーダ装置には限られない。ここでは、図15(a)に示すように、物体検出装置10が、移動物体70と微動物体75を1つずつ捕捉したとする。この場合、表示部15では、図15(b)に示すように、移動物体70の位置と微動物体75の位置が表示される。
【0093】
このように、物体検出装置10は、その物体からの反射波を観測する時間を変更する。例えば、移動物体は1つのレンジビンに存在する時間が短いので、物体検出装置10は、移動物体が1つのレンジビンにいる時間に観測された反射波を用いて移動物体を検出する。一方、微動物体は1つのレンジビンに存在する時間が移動物体に比べて長く、さらに、微動物体の動きの周波数が小さいため、物体検出装置10は、移動物体より長い時間にわたって反射波を観測することにより微動物体を検出する。言い換えると、物体検出装置10は、検出に用いるベースバンドデジタル信号の数を検出対象の物体の移動の速さに応じて変更している。物体検出装置10は、物体の移動の速さに応じて反射波を観測する時間の長さを変更することにより、移動物体と微動物体の両方を検出することができる。
【0094】
<第2の実施形態>
図16は、移動物体70の後ろに静止物体80がある場所で、移動物体と微動物体を捕捉した場合の例を説明する図である。図16の例では、物体検出装置10は、壁1aと壁1bにはさまれていて静止物体80を含む領域中の移動物体と微動物体を検出している。図16(a)は、移動物体70が移動する方向と、物体検出装置10と移動物体70を結ぶ直線とのなす角度が小さい場合の例を示している。この場合、移動物体70が移動することにより、物体検出装置10と移動物体70を結ぶ直線状に位置する静止物体80は、物体検出装置10から見え隠れすることがある。すなわち、静止物体80からの反射波は、移動物体70の動き方に応じて変動することがある。このように静止物体80の一部分が見え隠れするときの反射波の変動の周波数に応じて、物体検出装置10は、静止物体80の位置に、誤って微動物体を検出してしまうことがある。
【0095】
例えば、移動物体70が人間であるとすると、人間が図16(a)の矢印に示す方向に歩くときに、手や足を振ることにより静止物体80からの反射波の強度が変動する。この変動のために、静止物体80の位置に微動物体75がいるように見えるので、表示部15では、図16(b)に示す検出結果が表示される。そこで、第2の実施形態では、物体検出装置と移動物体70を結んだ先に静止物体80がある場合でも、誤検出を防ぐための物体検出装置について説明する。
【0096】
図17は、第2の実施形態に係る物体検出装置90の構成の例を示す図である。物体検出装置90は、制御部11、送信部12、送信アンテナ13、受信アンテナ14、受信部20、表示部15、および、データ処理部100を備える。データ処理部100は、微動物体検出部101(101a、101b)、および、微動物体判定部104(104a、104b)を備え、さらに、メモリ31、移動物体角度計算部32、微動物体角度計算部33、移動物体検出部40を備える。微動物体検出部101は、計算部102、検出部103、信号取得部51、および、経時変化取得部52を備える。
【0097】
以下、計算部102、検出部103、微動物体判定部104の動作について説明する。なお、以下の説明では、微動物体検出部101aと微動物体判定部104aの動作について説明するが、微動物体検出部101bと微動物体判定部104bの動作も同様である。また、信号取得部51と経時変化取得部52の動作は、第1の実施形態と同様である。さらに、移動物体検出部40、メモリ31、移動物体角度計算部32、微動物体角度計算部33、制御部11、送信部12、送信アンテナ13、受信アンテナ14、表示部15、受信部20で行われる動作も、第1の実施形態と同様である。
【0098】
図18は、周波数スペクトルの例を示す図である。図18(a)は、座っている人などの微動物体からの反射波の強度の経時変化に基づいて計算部102aが求めた周波数スペクトルの例である。なお、計算部102aが経時変化取得部52aから取得した経時変化から周波数スペクトルを求める方法は、第1の実施形態で計算部53aが周波数スペクトルを生成した方法と同様である。微動物体からの反射波の周波数スペクトルは、例えば、1.0Hz以下の比較的低い周波数領域の強度が強くなる。
【0099】
図18(b)は、移動物体70の移動により静止物体80から反射した反射波の周波数スペクトルの例を示す図である。移動物体70の影響による静止物体80からの反射波の強度の変化は、例えば、0.1Hz〜10Hzなど、微動物体からの反射波の周波数スペクトルに比べて広い範囲に渡ったピークが見られる。これは、静止物体80からの反射波が移動物体70の影響を受けているためである。移動物体70からの反射波の周波数スペクトルは、図18(c)に示すように、図18(b)と同様の広い範囲に渡ったピークを示す。従って、周波数スペクトルのうちの比較的高周波側での強度が高いスペクトルが観測される場合は、移動物体70の動きによって変動した静止物体80からの反射波を観測していることになる。
【0100】
そこで、例えば、計算部102aは、周波数スペクトルが求められた各レンジビンについて、第1の閾値よりも高い周波数領域の周波数バンクの強度の合計値と、第1の閾値よりも低い周波数領域の周波数バンクの強度の合計値の両方を求める。ここで、第1の閾値は、例えば、微動物体の動作により観測される受信強度の変化の上限値とすることができる。計算部102aは、予め、強度の合計値を求める周波数バンクを記憶しているものとする。例えば、計算部102aは、低い周波数領域での強度の合計値として0.2Hz〜1.0Hzでの合計値を求め、高い周波数領域での強度の合計値として1.0Hz〜10.0Hzでの合計値を求めることができる。なお、第1の閾値の周波数は、物体検出装置90で観測される微動物体に応じて決定される。例えば、微動物体が座っている人であれば、座っている人の呼吸による反射波の強度の変化の周波数とほぼ同じ値となる1.0Hzが境界として用いられる。
【0101】
図19は、計算部102が微動物体の検出に用いる周波数領域の例を説明する図である。図19(a)に示すように、計算部102aは、各レンジビンについて、低い周波数範囲61(61a〜61i)の周波数バンクでの強度の合計値と、高い周波数範囲62(62a〜62i)の周波数バンクでの強度の合計値を求める。図19(b)は、低い周波数範囲61の周波数バンクにおいて得られたスペクトラム強度の合計値をレンジビンの関数として示す図の例である。また、図19(c)は、高い周波数範囲62の周波数バンクにおいて得られたスペクトラム強度の合計値をレンジビンの関数として示す図の例である。計算部102aは、算出した合計値を検出部103aに出力する。
【0102】
図20は、検出部103aの動作の例を説明する図である。図20(a)に示すように、検出部103aは、各レンジビンで得られた高い周波数範囲62の強度の合計値を、第2の閾値(高域閾値)と比較する。高域閾値は、微動物体が誤検出かを判定するために用いられる。高い周波数範囲62の強度の合計値が高域閾値より大きいと、微動物体判定部104aにおいて誤検出であると判定される。判定については、後述する。さらに、検出部103aは、高域閾値を超えているレンジビンの番号を、高い周波数範囲62の強度の合計値が高域閾値を越えている旨とともに記憶する。図20(a)の例では、レンジビンR6で、高い周波数範囲62の強度の合計値が第2の閾値を越えていることが記憶される。
【0103】
一方、各レンジビンで得られた低い周波数範囲61の強度の合計値について、検出部103aは、図20(b)に示すように、第3の閾値(低域閾値)と比較する。低域閾値は、微動物体の検出に用いられる。低い周波数範囲61の強度の合計値が低域閾値より大きいと、微動物体が検出されている可能性があると判定される。判定については、後述する。検出部103aは、低域閾値を超えているレンジビンの番号を、低い周波数範囲61の強度の合計値が低域閾値を越えている旨とともに記憶する。図20(b)の場合、検出部103aは、レンジビンR4〜R6で、低い周波数範囲61の強度の合計値が第2の閾値を越えていることを記憶する。
【0104】
次に、検出部103aは、高域閾値を越えたレンジビンの番号から、通知されたレンジビンの間の距離を求める。さらに、捕捉される微動物体の大きさと通知されたレンジビンの間の距離を比較し、検出された目標が1つであるか、複数であるかを判定する。この判定方法は、検出部54で行われる判定の方法と同様である。さらに、検出部103aは、複数のレンジビンで低域閾値を越えたことが通知された場合も、同様の処理を行う。
【0105】
図21A〜図21Cは、微動物体検出部101の動作の例を説明するフローチャートである。図21A〜図21Cは例であり、微動物体検出部101の動作は、例えば、ステップS74〜S78の順番を任意に入れ替えるなどの変更が加えられる場合がある。また、ステップS68とS69がステップS70とS71より後に行われるように、微動物体検出部101の動作が変更される場合もある。ステップS61〜S65は、図12のステップS31〜S35と同様である。なお、図21A〜図21Cのフローチャートにおいて、変数tlは、低い周波数範囲61のデータから検出された目標(低域微動目標)の数の計数に用いられる。一方、変数thは、高い周波数範囲62のデータから検出された目標(高域微動目標)の数の計数に用いられる。なお、高域微動目標の数は、静止物体を微動物体と誤っている検出結果の数である。
【0106】
計算部102は、レンジビンごとの経時変化を求め、さらに、経時的な強度の変動の周波数スペクトルを求める(ステップS66、S67)。計算部102は、周波数スペクトルのうちの低い周波数範囲61での周波数バンクごとの強度の合計値を求めて記憶する(ステップS68、S69)。計算部102は、周波数スペクトルのうちの高い周波数範囲62での周波数バンクごとの強度の合計値を求めて記憶する(ステップS70、S71)。計算部102は、rを1つインクリメントして、レンジビンの番号の最大値と比較する(ステップS72、S73)。全てのレンジビンについて合計値が求められるまで、ステップS66〜S73の処理が繰り返される。
【0107】
合計値の算出が終わると、検出部103は、計算部102で計算された低い周波数範囲61の強度の合計値と、高い周波数範囲62の強度の合計値を、各々の合計値が得られたレンジビンの番号と対応付けて取得する(ステップS74、S75)。検出部103は、変数rを1に設定し、さらに、変数tl、thの値を1に設定する(ステップS76〜S78)。検出部103は、レンジビンごとに、低い周波数範囲61の強度の合計値を第3の閾値(低域閾値)と比較する(ステップS79)。合計値が低域閾値以下の場合、検出部103は、微動物体を検出していないと判定し、次のレンジビンを処理対象とする(ステップS79でNo)。
【0108】
合計値が低域閾値より大きい場合、検出部103は、変数tlの値が2未満であるかを確認する(ステップS80)。変数tlが2以上の場合、複数のレンジビンに亘って、1つの微動物体が検出されている可能性があるので、検出部103は、捕捉する微動物体の大きさと、合計値が低域閾値を超えたレンジビンの間の距離を比較する(ステップS81)。合計値が低域閾値より大きいレンジビン同士の距離が微動物体の大きさ以上の場合、検出部103は、tl番目の微動物体が検出された可能性があると判定してtlの値を1つインクリメントする(ステップS82、S83)。一方、合計値が低域閾値より大きいレンジビン同士の距離が微動物体の大きさより小さい場合、検出部103は、新たに微動物体を検出した可能性はないと判定する(ステップS81でNo)。
【0109】
検出部103は、レンジビンごとに、高い周波数範囲62の強度の合計値を第2の閾値(高域閾値)と比較する(ステップS84)。合計値が高域閾値より大きい場合、検出部103は、変数thの値が2未満であるかを確認する(ステップS85)。変数thが2以上の場合、検出部103は、捕捉する微動物体の大きさと、合計値が高域閾値を超えたレンジビンの間の距離を比較する(ステップS86)。合計値が高域閾値より大きいレンジビン同士の距離が微動物体の大きさ以上の場合、検出部103は、新たな誤検出を発見した可能性があると判定して、thの値を1つインクリメントする(ステップS87、S88)。一方、合計値が高域閾値より大きいレンジビン同士の距離が微動物体の大きさより小さい場合、検出部103は、新たな誤検出を発見した可能性はないと判定する(ステップS86でNo)。その後、検出部103は、rの値をインクリメントして次のレンジビンを処理対象とする(ステップS89)。さらに、検出部103は、変数rの値をレンジビンの番号の最大値と比較する(ステップS90)。検出部103は、全てのレンジビンについてステップS79〜S90の動作を行う。
【0110】
信号取得部51は、tの値をメモリ31に記憶されているベースバンドデジタル信号の総数(t_max)と比較する(ステップS91)。変数tの値がt_max以下の場合、信号取得部51は、現在の処理で得られた結果を、微動物体判定部104に出力する(ステップS92、S93)。また、信号取得部51は、変数tを1つインクリメントし、変数nを0にする(ステップS94)。変数tの値がt_maxとなるまで、ステップS62〜S94の処理が繰り返される。
【0111】
図22は、微動物体判定部104が取得したデータの例を示すテーブルである。微動物体判定部104は、検出部103から、高い周波数範囲62の強度の合計値が高域閾値を超えたレンジビン番号に対応する距離と、低い周波数範囲61の強度の合計値が低域閾値を超えたレンジビン番号に対応する距離を取得する。なお、微動物体判定部104は、検出部103からレンジビン番号を取得して、距離に変換することもできる。また、微動物体判定部104は、高い周波数範囲62と低い周波数範囲61のいずれの強度の合計値が閾値を超えているかも、距離と対応付けて記憶する。例えば、No.1のデータは、低い周波数範囲61の強度の合計値が低域閾値を越えている位置を介した、送信アンテナ13から受信アンテナ14までの距離が3.0mであることを示している。同様に、No.2のデータは、高い周波数範囲62の強度の合計値が高域閾値を越えている位置を介した、送信アンテナ13から受信アンテナ14までの距離が3.1mであることを示している。
【0112】
図23は、微動物体判定部104で行われる判定の例を説明するフローチャートである。微動物体判定部104は、記憶しているデータが、低い周波数範囲61の強度の処理によって得られたかを判定する(ステップS101)。データが低い周波数範囲61の強度の処理によって得られたものではない場合、微動物体判定部104は、微動物体を検知していないと判定する(ステップS101でNo、ステップS102)。例えば、微動物体判定部104は、図23のNo.2のデータに対応する微動物体は無いと判定する。
【0113】
一方、低い周波数範囲61の強度の処理によって得られたデータについて、微動物体を検知した可能性があると判定する(ステップS101でYes)。そこで、微動物体判定部104は、低い周波数範囲61の強度の処理によって得られたデータが検出された距離から微動物体の大きさの範囲内で、高い周波数範囲62の強度の合計値が高域閾値を超えているかを確認する(ステップS103)。高い周波数範囲62の強度の合計値が高域閾値を超えている場合、低い周波数範囲61の強度の合計値が低域閾値を越えた位置には微動物体がないと判定する(ステップS103でYes、ステップS104)。一方、高い周波数範囲62の強度の合計値が高域閾値を超えていない場合、低い周波数範囲61の強度の合計値が低域閾値を越えた位置に微動物体が存在すると判定する(ステップS103でNo、ステップS105)。
【0114】
例えば、No.4のデータに基づいて、微動物体判定部104は、送信アンテナ13から微動物体を介した受信アンテナ14までの距離が4.0mとなる位置に微動物体が存在する可能性があると判定する。さらに、微動物体判定部104は、送信アンテナ13および受信アンテナ14からの距離が4.0mとなる位置で、高い周波数範囲62の強度を確認する。No.5のデータに示すように、図23では、4.0mの距離で高い周波数範囲62の強度の合計値が高域閾値を超えている。そこで、微動物体判定部104は、距離が4.0mのデータは、微動物体ではなく、移動物体の動作によって移動物体の背景にある静止物体からの反射波が変化した信号を検出していると判定する。また、No.1とNo.2のデータの組み合わせについても、微動物体の大きさが0.1m以上であれば、微動物体の大きさの範囲内で、低い周波数範囲61の強度の合計値と、高い周波数範囲62の強度の合計値の両方が閾値を超えている。この場合、微動物体判定部104は、No.1とNo.2のデータも、移動物体の動作によって移動物体の背景にある静止物体からの反射波が変化した信号に基づいていると判定する。
【0115】
一方、No.3のデータで得られた距離から微動物体の大きさの範囲内で、高い周波数範囲62の強度の合計値が高域閾値を超えていなかったとする。すると、微動物体判定部104は、No.3のデータは、微動物体を検出した結果であると判定する。
【0116】
微動物体判定部104は、微動物体に基づいたデータであると判定したデータを微動物体角度計算部33に出力する。一方、移動物体の背景にある静止物体からの反射波に基づいて検出された結果については、微動物体判定部104は、微動物体角度計算部33に出力しない。なお、ここまで説明した動作は、微動物体検出部101a、101b、および、微動物体判定部104a、104bで行われる。すなわち、微動物体判定部104aは、受信アンテナ14aで受信された反射波から得られたデータを処理して判定結果を微動物体角度計算部33に出力する。また、微動物体判定部104bは、受信アンテナ14bで受信された反射波から得られたデータを処理して判定結果を微動物体角度計算部33に出力する。
【0117】
微動物体角度計算部33は、微動物体判定部104から入力されたデータに基づいて微動物体位置を特定する。従って、微動物体角度計算部33は、静止物体からの反射波ではないことが確認されたデータについて位置を特定するが、移動物体の背後に位置する静止物体は検出しない。微動物体の位置の特定方法は、第1の実施形態で述べたとおりである。また、微動物体角度計算部33は特定された位置を表示部15に出力する。表示部15は、微動物体角度計算部33から入力された結果を、移動物体角度計算部32から入力された結果と共に、ディスプレイに表示する。
【0118】
このように、微動物体判定部104は、微動物体として検出された反射波の強度の変動が、微動物体に基づいたものか、静止物体に基づいて得られたものかを判定する。そして、微動物体判定部104は、微動物体に基づいて検出された反射波の強度の変化だけを移動物体角度計算部32に通知するため、物体検出装置90では、移動物体の背後の静止物体の位置は特定しない。このため、物体検出装置90は、図16に示したように、静止物体を微動物体と誤って検出することを防ぐことができる。物体検出装置90は、微動物体と静止物体を区別することができるので、例えば、室内などの狭い場所での移動物体と微動物体の検知に用いることができる。
【0119】
<第3の実施形態>
誤検出かの判定は、第2の実施形態に示したようにアンテナごとにデータを処理している段階で行われる場合があるが、検出された目標の位置を特定した後に行われる場合もある。第3の実施形態では、目標の位置が特定された後に、誤検出の判定が行われる場合の物体検出装置について説明する。
【0120】
図24は、第3の実施形態に係る物体検出装置110の構成の例を示す図である。物体検出装置110は、制御部11、送信部12、送信アンテナ13、受信アンテナ14、表示部15、受信部20、および、データ処理部120を備える。データ処理部120は、低域角度計算部121、高域角度計算部122、微動物体判定部123を備える他、メモリ31、移動物体検出部40、微動物体検出部101、移動物体角度計算部32を備える。メモリ31、微動物体検出部101、移動物体角度計算部32の動作は、第2の実施形態と同様である。また、制御部11、送信部12、送信アンテナ13、受信アンテナ14、表示部15、受信部20、移動物体検出部40の動作も、第1もしくは第2の実施形態と同様である。
【0121】
検出部103aは、検出したデータのうち、周波数スペクトルの低い周波数範囲62から得られた合計値に基づいて算出された距離を、低域角度計算部121に通知する。また、検出部103aは、高い周波数範囲62から得られた合計値に基づいて算出された距離を、高域角度計算部122に通知する。検出部103bも検出部103aと同様に動作する。また、検出部103aは、低域角度計算部121もしくは高域角度計算部122に出力したデータを廃棄する。
【0122】
低域角度計算部121は、周波数スペクトルの低い周波数範囲61から得られたデータを用いて、合計値が低域閾値を超えた位置を特定する。すなわち、低域角度計算部121は、微動物体が存在する可能性のある全ての位置について、送信アンテナ13からの距離と角度θの値を求める。位置の特定方法は、第1の実施形態で述べた移動物体角度計算部32や微動物体角度計算部33の用いる特定方法と同様である。低域角度計算部121は、特定した距離と角度を微動物体判定部123に通知する。
【0123】
高域角度計算部122は、周波数スペクトルの高い周波数範囲62から得られたデータを用いて、合計値が高域閾値を超えた位置を特定する。つまり、高域角度計算部122は、移動物体の背後にある静止物体について、送信アンテナ13からの距離と角度θを求める。高域角度計算部122により特定される位置は、低域角度計算部121により微動物体と誤検出された目標の位置である。高域角度計算部122は、特定した位置と距離を微動物体判定部123に通知する。なお、高域角度計算部122は、第1の実施形態で述べた移動物体角度計算部32などの用いる特定方法を用いて、誤検出された目標の位置を求める。
【0124】
微動物体判定部123は、低域角度計算部121と高域角度計算部122から得られた位置を比較する。図25は、微動物体判定部123が取得したデータの例を示すテーブルである。微動物体判定部123は、通知された各々の位置を表す距離と角度について、低域角度計算部121の高域角度計算部122のいずれから通知されたかを対応付けて記憶する。
【0125】
微動物体判定部123は、低域角度計算部121から通知された位置のそれぞれについて、その位置から微動物体の大きさの範囲に、高域角度計算部122から通知された位置があるかを確認する。低域角度計算部121から通知された位置から微動物体の大きさの範囲に、高域角度計算部122から通知された位置がある場合、微動物体判定部123は、低域角度計算部121からの通知は誤目標の位置であると判定する。例えば、低域角度計算部121から通知された位置と高域角度計算部122から通知された位置が一致する場合、微動物体判定部123は、低域角度計算部121から通知された位置には微動物体が存在しないと判定する。また、例えば、微動物体の大きさが0.5mであると、図25の例では、No.1のデータが示す位置とNo.2のデータが示す位置は、微動物体の大きさの範囲内である。さらに、No.1のデータは低域角度計算部121から通知され、No.2のデータは、高域角度計算部122から通知されている。従って、微動物体判定部123は、No.1のデータは、移動物体の影響により静止物体を微動物体と誤認していると判定する。
【0126】
一方、No.3、No.4のデータに示されている位置から微動物体の大きさの範囲内には、高域角度計算部122から得られた位置がないとする。この場合、No.3、No.4のデータが表す位置に微動物体が存在すると判定する。
【0127】
従って、第3の実施形態に係る物体検出装置110でも、移動物体と微動物体を同時に検出することができ、さらに、静止物体を微動物体と誤って検出することを防ぐことができる。
【0128】
<第4の実施形態>
第4の実施形態では複数の送信部と1つの受信部を備える物体検出装置について説明する。
【0129】
図26は、第4の実施形態に係る物体検出装置130の構成の例を示す図である。物体検出装置130は、複数の送信部132(132a、132b)、送信アンテナ13(13a、13b)を備え、受信アンテナ14と受信部140を1つずつ備える。物体検出装置130は、さらに、制御部131、データ集録部145、データ処理部100、表示部15を備える。データ処理部100、表示部15の動作は、第2の実施形態と同様である。
【0130】
制御部131は、第1および第2の送信クロック信号、受信クロック信号、受信トリガ信号を生成する。ここで、制御部131は、送信部132aからレーダパルスが送信される間は、送信部132bからレーダパルスが送信されないように、第1および第2の送信クロック信号を生成する。以下の説明では、送信部132aから1つのベースバンドデジタル信号の生成に用いられる数のレーダパルスが送信された後、送信部132bから同数のレーダパルスが送信されるなど、2つの送信部12から交互にレーダパルスの送信が行われるものとする。制御部131は、第1の送信クロック信号を送信部132a、第2の送信クロック信号を送信部132bに出力する。さらに、制御部131は、受信クロック信号を受信部140に出力し、受信トリガ信号をデータ集録部145に出力する。
【0131】
第1の送信クロック信号は、送信部132aから送信アンテナ13aを介してレーダパルスを出力するときのタイミングの制御に用いられる。送信部132aは、第1の送信クロック信号で指定されたタイミングに合わせて、送信アンテナ13aを介してレーダパルスを目標に送信する。一方、送信部132bは、第2の送信クロック信号にあわせて、送信アンテナ13bを介してレーダパルスを目標に送信する。
【0132】
受信部140は、ゲートパルス生成部21と検波部22を備える。受信部140は、受信クロック信号を用いて等価サンプリングを行い、ベースバンドデジタル信号を生成する。受信部140は、送信アンテナ13aを介して送信されたレーダパルスの反射波と、送信アンテナ13bを介して送信されたレーダパルスの反射波を交互に受信する。なお、受信アンテナ14、ゲートパルス生成部21、検波部22の動作は、第1の実施形態と同様である。
【0133】
データ集録部145は、受信トリガ信号に応じてベースバンドデジタル信号を生成する。受信トリガ信号は、ベースバンドデジタル信号を生成するタイミングと、送信部132a、132bのいずれから送信されたレーダパルスの反射波を受信しているかを特定する情報が含まれる。データ集録部145は、受信トリガ信号に含まれている情報を用いて、ベースバンドデジタル信号をメモリ31aとメモリ31bのいずれに出力するかを決定する。すなわち、データ収録部145は、送信部132aから送信されたレーダパルスの反射波を用いて生成されたベースバンドデジタル信号を、メモリ31aに出力する。一方、データ収録部145は、送信部132bから送信されたレーダパルスの反射波を用いて生成されたベースバンドデジタル信号を、メモリ31bに出力する。
【0134】
本実施形態では、2つの送信部132が含まれている物体検出装置130について説明したが、物体検出装置130に含まれる送信部132の数は任意の正の整数とすることができる。また、上記の説明では、データ処理部100を含む物体検出装置130について説明したが、第1の実施形態や第3の実施形態に係る物体検出装置でも、物体検出装置130と同様に送信部132の数を変更することができる。従って、物体検出装置に含まれる受信部140や送信部132の数は任意に変更することができるといえる。
【0135】
等価時間サンプリング方式を用いるレーダ装置では、受信部140よりも送信部132のほうが回路を小型にすることができることが多い。そこで、物体検出装置が備える受信部140の数を減らすことにより物体検出装置を小型化し、軽量化することができる。さらに、送信部132を複数備えることにより、受信部140が1つであっても、移動物体や微動物体の位置を特定することができる。
【0136】
<その他>
物体検出装置10、90、110、130のいずれも、Radio Frequency(RF)回路、メモリ、Central Processing Unit(CPU)、および、表示装置を備えている。例えば、RF回路は、制御部11、送信部12、送信アンテナ13、受信アンテナ14、受信部20として動作することができる。メモリは、メモリ31として動作する。CPUは、データ処理部30、100、120として動作することができる。なお、物体検出装置10、90、110、130は、CPUの代わりにDigital Signal Processor(DSP)などを備えることもでき、この場合は、DSPがデータ処理部30、100、120として動作する。表示装置は、表示部15として動作する。
【0137】
図15、図16を参照しながら、物体検出装置10が壁透過レーダを備えている場合について述べたが、物体検出装置90、110のいずれも、壁透過レーダを備えることができる。さらに、物体検出装置10、90、110に搭載されるレーダの種類や用途は、壁透過レーダに限られない。物体検出装置10、90、110、130は、例えば、森林透過レーダ、生存者探知レーダなどや、その他の様々な用途に用いられるレーダを搭載することができる。
【0138】
第2の時間が経過する間に移動する移動物体の検出位置の変動が問題とならない用途に用いられる物体検出装置10、90、110、130では、第1の時間の終了時刻を第2の時間の終了時刻と同じ時刻としなくても良い。この場合、例えば、微動物体検出部50での時刻T1〜T128のベースバンドデジタル信号の処理結果と、移動物体検出部40での時刻T1〜T8のベースバンドデジタル信号の処理結果を同時に表示部15に表示することができる。
【0139】
また、以上の説明では、ベースバンド周期が50msの場合を例として説明したが、第1〜第4の実施形態のいずれでも、ベースバンド周期は、送信クロック信号と受信クロック信号の値に応じて、任意に変更される場合がある。
【0140】
上述の第1〜第4の実施形態を含む実施形態に関し、さらに以下の付記を開示する。
(付記1)
レーダパルスを送信する送信部と、
物体からの前記レーダパルスの反射波を受信する受信部と、
前記受信部が第1の時間の間に受信した受信信号を解析することにより、移動している移動物体を検出する移動物体検出部と、
前記第1の時間よりも長い第2の時間の間に、前記受信部が受信した受信信号を解析することにより前記移動物体に比べて移動量が微小な微動物体を検出する微動物体検出部と
を備えることを特徴とする物体検出装置。
(付記2)
前記微動物体検出部は、
前記第2の時間の間に前記受信部が受信した受信信号の強度の経時変化を、検出対象の微動物体を介した前記送信部から前記受信部までの距離に応じて求める経時変化取得部と、
前記経時変化の波形を周波数スペクトルに変換すると共に、第1の閾値よりも高い周波数において前記周波数スペクトルの強度の合計値を計算する計算部を備え、
前記合計値が第2の閾値を超えると、前記経時変化が観測された距離には微動物体が存在しないと判定する微動物体判定部
をさらに備えることを特徴とする付記1に記載の物体検出装置。
(付記3)
前記計算部は、前記第1の閾値以下の周波数において前記周波数スペクトルの強度の合計値を計算し、
前記微動物体判定部は、前記第1の閾値以下の周波数において前記周波数スペクトルの強度の合計値が第3の閾値を超えると、前記経時変化に対応する距離を満たす位置に微動物体が存在すると判定する
ことを特徴とする付記2に記載の物体検出装置。
(付記4)
前記微動物体判定部は、前記周波数スペクトルでの前記第1の閾値よりも高い周波数の強度の合計値が前記第2の閾値を超え、さらに、前記第1の閾値以下の周波数において前記周波数スペクトルの強度の合計値が前記第3の閾値を超えると、前記経時変化に対応する距離を満たす位置で検出された物体は静止していると判定する
ことを特徴とする付記3に記載の物体検出装置。
(付記5)
前記移動物体検出部は、
前記受信部が受信した受信信号の強度の前記第1の時間中の経時変化を、検出対象の移動物体を介した前記送信部から前記受信部までの距離に応じて求めると共に、前記第1の時間中の経時変化の波形に含まれる周波数の強度を示す周波数スペクトルを求め、
前記第1の時間中の経時変化から得られた周波数スペクトルで、正の周波数の強度の合計値が第4の閾値以上であると、前記第1の時間中の経時変化に対応する距離を満たす位置で移動物体を検出したと判定する
ことを特徴とする付記1〜4のいずれか1項に記載の物体検出装置。
(付記6)
前記移動物体検出部は、第1の開始時刻から前記第1の時間が経過するまでに受信された受信信号から得られた第1の検出結果と、前記第1の開始時刻より後の第2の開始時刻から前記第1の時間が経過するまでに受信された受信信号から得られた第2の検出結果とを用いて、前記第1の開始時刻から前記第2の開始時刻までの前記移動物体の移動の軌跡を求め、
前記微動物体判定部は、第3の開始時刻から前記第2の時間が経過するまでに受信された受信信号から得られた第1の判定結果と、前記第3の開始時刻より後の第4の開始時刻から前記第2の時間が経過するまでに受信された受信信号から得られた第2の判定結果とを用いて、前記第3の開始時刻から前記第4の開始時刻までの前記微動物体の移動の軌跡を求める
ことを特徴とする付記2〜5のいずれか1項に記載の物体検出装置。
(付記7)
レーダパルスを送信し、
物体からの前記レーダパルスの反射波を受信し、
第1の時間の間に受信した受信信号を解析することにより、移動している移動物体を検出し、
前記第1の時間よりも長い第2の時間の間に受信した受信信号を解析することにより、前記移動物体に比べて移動量が微小な微動物体を検出する
ことを特徴とする検出方法。
【符号の説明】
【0141】
10、90、110、130 物体検出装置
11 制御部
12、132 送信部
13 送信アンテナ
14 受信アンテナ
15 表示部
20、140 受信部
21 ゲートパルス生成部
22 検波部
23、145 データ集録部
30、100、120 データ処理部
31 メモリ
32 移動物体角度計算部
33 微動物体角度計算部
40 移動物体検出部
41、51 信号取得部
42、52 経時変化取得部
43、53、102 計算部
44、54、103 検出部
50、101 微動物体検出部
70 移動物体
75 微動物体
80 静止物体
104、123 微動物体判定部
121 低域角度計算部
122 高域角度計算部
【技術分野】
【0001】
本発明は、レーダを用いた物体検出装置と、物体の検出方法に関する。
【背景技術】
【0002】
近年、超広帯域(Ultra-Wideband、UWB)レーダ装置を用いた物体の検出が行われてきている。UWBレーダ装置では、広帯域にわたる様々な周波数の電波が送受信される。このため、例えば、コンクリートや木材等の非金属を透過する波長の電波の送受信が可能なUWBレーダ装置を用いて、壁越しに物体を検出することができる。
【0003】
また、UWBレーダを含む種々のレーダ装置を用いた移動物体の検出も行われている。関連する技術として、短時間フーリエ変換を用いて、小さな移動物体を検出する装置も知られている。この装置は、受信信号を短時間フーリエ変換により時間−周波数軸上の信号に変換し、得られた信号の極大値の時間軸方向の所定の範囲について信号の強度を加算する。さらに、加算により得られた値が閾値を超えたかの判定結果に基づいて、目標が検出されたかが判定される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−256409号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、高速で移動する移動物体の検出を行うレーダ装置では、移動速度が遅い物体が検出されないという問題がある。このため、複数の移動物体がレーダ装置の検知範囲に存在しても、移動物体の移動速度の差が大きい場合は、検知範囲に含まれている全ての移動物体を検知することができないという問題があった。また、背景技術の欄では、UWBレーダについて述べているが、他のレーダ装置を用いたシステムでも、送信したレーダパルスの反射波を用いて目標までの距離と角度を計測する場合には、移動速度が異なる物体を検知できない場合がある。
【0006】
本発明は、レーダ装置の検知範囲に含まれている物体を、その物体の移動速度に関わらず検知することを目的とする。
【課題を解決するための手段】
【0007】
実施形態に係る物体検出装置は、送信部、受信部、移動物体検出部、および、微動物体検出部を備える。送信部は、レーダパルスを送信する。受信部は、物体からの前記レーダパルスの反射波を受信する。移動物体検出部は、前記受信部が第1の時間の間に受信した受信信号を解析することにより、移動している移動物体を検出する。微動物体検出部は、前記第1の時間よりも長い第2の時間の間に、前記受信部が受信した受信信号を解析することにより前記移動物体に比べて移動量が微小な微動物体を検出する。
【発明の効果】
【0008】
レーダ装置の検知範囲に含まれている個々の移動物体は、その移動速度に関わらず検知される。
【図面の簡単な説明】
【0009】
【図1】第1の実施形態にかかる物体検出装置の構成の例を示す図である。
【図2】受信部で行われる処理の例を説明する図である。
【図3】データ集録部で生成されるベースバンドデジタル信号の例を示す図である。
【図4】経時変化取得部の処理の例を説明する図である。
【図5】レンジビンごとの受信強度の経時変化と計算部の動作の例を説明する図である。
【図6】計算部の動作の例を説明する図である。
【図7】周波数バンクでの受信強度の合計値の例を示す図である。
【図8A】移動物体検出部で行われる処理の例を説明するフローチャートである。
【図8B】移動物体検出部で行われる処理の例を説明するフローチャートである。
【図9】ベースバンドデジタル信号の例を示す図である。
【図10】微動物体検出部での処理の例を説明する図である。
【図11】レンジビンごとの合計値の例を示す図である。
【図12A】微動物体検出部の動作の例を説明するフローチャートである。
【図12B】微動物体検出部の動作の例を説明するフローチャートである。
【図13】移動物体角度計算部が保持するデータの例を示すテーブルである。
【図14】目標の位置を特定する方法の例を説明する図である。
【図15】表示部での表示例を示す図である。
【図16】移動物体の後ろに静止物体がある場所で移動物体と微動物体を捕捉した場合の例を説明する図である。
【図17】第2の実施形態に係る物体検出装置の構成の例を示す図である。
【図18】周波数スペクトルの例を示す図である。
【図19】計算部が微動物体の検出に用いる周波数領域の例を説明する図である。
【図20】検出部の動作の例を説明する図である。
【図21A】微動物体検出部の動作の例を説明するフローチャートである。
【図21B】微動物体検出部の動作の例を説明するフローチャートである。
【図21C】微動物体検出部の動作の例を説明するフローチャートである。
【図22】微動物体判定部が取得したデータの例を示すテーブルである。
【図23】微動物体判定部で行われる判定の例を説明するフローチャートである。
【図24】第3の実施形態に係る物体検出装置の構成の例を示す図である。
【図25】微動物体判定部が取得したデータの例を示すテーブルである。
【図26】第4の実施形態に係る物体検出装置の構成の例を示す図である。
【発明を実施するための形態】
【0010】
<第1の実施形態>
図1は、第1の実施形態にかかる物体検出装置10の構成の例を示す図である。図1では、受信アンテナ14と受信部20を2つ備えている物体検出装置10の例を示しているが、物体検出装置10に備えられる受信アンテナ14や受信部20などの数は、1つ以上の任意の数に変更される場合がある。
【0011】
物体検出装置10は、制御部11、送信部12、送信アンテナ13、受信アンテナ14(14a、14b)、受信部20(20a、20b)、表示部15、およびデータ処理部30を備える。受信部20は、ゲートパルス生成部21(21a、21b)、検波部22(22a、22b)、データ集録部23(23a、23b)を備える。データ処理部30は、メモリ31、移動物体検出部40、微動物体検出部50、移動物体角度計算部32および微動物体角度計算部33を備える。移動物体検出部40は、信号取得部41、経時変化取得部42、計算部43、検出部44を備える。微動物体検出部50は、信号取得部51、経時変化取得部52、計算部53、検出部54を備える。
【0012】
制御部11は、レーダパルス(送信パルス)を送信するタイミングの調整に用いられる信号を生成し、送信部12に出力する。また、制御部11は、目標に照射されたレーダパルスの反射波を受信するタイミングなどを調整するために用いられる信号も生成し、受信部20に出力する。例えば、等価時間サンプリング方式によりベースバンド信号が生成される場合、制御部11は、送信クロック信号、受信クロック信号、受信トリガ信号を生成する。受信クロック信号の周波数は、送信クロック信号の周波数と異なる周波数であるものとする。例えば、受信クロック信号の周波数は、送信クロック信号の周波数に比べて20Hz程度低いことがある。また、受信トリガ信号は、送信クロック信号の周波数と受信クロック信号の周波数との差の逆数の周波数の信号であるものとする。すなわち、送信クロック信号の周波数(ft)で受信クロック信号の周波数が(fr)であるとすると、受信トリガ信号の周波数は1/(ft−fr)の絶対値となる。制御部11は、送信クロック信号を送信部12に出力する。また、制御部11は、受信クロック信号をゲートパルス生成部21に出力し、受信トリガ信号をデータ集録部23に出力する。
【0013】
送信部12は、送信クロック信号を受け取ると、送信クロック信号で指定されるタイミングに合わせてレーダパルスを、目標に送信する。レーダパルスは、送信アンテナ13を介して目標に送信される。ここで、目標は、レーダパルスの覆域に存在する物体であり、移動している物体や静止している物体などが含まれる場合がある。
【0014】
以下の説明では、歩行者や車両など移動している物体を「移動物体」と記載する。また、座っている人間、立っている人間、樹木などでは、呼吸や姿勢の変化、あるいは、風などによる形状の変動などの動きが観測されるが、移動量が移動物体に比べて微小である。このような物体を以下の説明では、「微動物体」と記載することがある。なお、微動物体の移動量には、呼吸や姿勢の変化量、風などによる形状の変動量も含まれる。さらに、壁や家具などのように移動しない物体を「静止物体」と記載することもある。
【0015】
送信部12から送信されたレーダパルスは目標で反射し、受信アンテナ14a、14bは、反射波を受信する。受信アンテナ14a、14bで受信された受信信号からベースバンド信号を取得する方法の例を、図2を参照しながら説明する。
【0016】
図2は、受信部20で行われる処理の例を説明する図である。図2は、送信クロック信号の周波数が受信クロック信号の周波数よりも高い場合の例を示している。図2(a)に示すタイミングで送信されたレーダパルスは目標で反射する。ここで、受信信号は、送信パルス信号が目標で反射することにより得られた信号であるので、送信クロック信号と同じ周波数の波形に近似できる。受信信号の例を図2(b)に示す。
【0017】
制御部11からゲートパルス生成部21に受信クロック信号が入力されると、ゲートパルス生成部21は、ゲートパルス信号を生成する。ゲートパルス生成部21は、図2(c)に示すように、ゲートパルス信号の立ち上がりと、受信クロック信号の入力が一致するように信号を生成する。ゲートパルス生成部21は、生成したゲートパルス信号を検波部22に出力する。
【0018】
検波部22は、受信信号の強度を、ゲートパルス信号で指定された期間にわたって取得する。ここで、ゲートパルス信号と受信クロック信号の立ち上がりが一致していて、送信クロック信号の周波数と受信クロック信号の周波数は異なっているので、ゲートパルス信号の立ち上がり位置は、図2(a)と図2(c)に示すように、送信クロックの周期とずれる。一方、図2(b)に示すように、受信信号の周期は送信クロックの周期と一致している。このため、検波部22によって受信強度が取得される期間は、ゲートパルス信号と送信クロックの周期とのずれの大きさの変動に伴って、受信信号の周期の中で変動する。すなわち、検波部22は、ゲートパルス信号に合わせて受信信号の強度を取得することにより、サンプル位置をずらしながら複数回にわたって受信信号の強度をサンプリングする。図2(d)に、検波部22が取得した信号の例を示す。検波部22は、取得した信号の強度をデータ集録部23に出力する。
【0019】
データ集録部23は、検波部22から取得したデータを、個々のデータが取得されたときの送信クロック周期と受信クロックの周期のずれの大きさの小さい順に並べることにより、図2(e)に示すようなベースバンドアナログ信号を生成する。ここで、ベースバンドアナログ信号は、受信トリガ信号が出力されてから次の受信トリガ信号が出力されるまでの間に、検波部22によって取得された受信信号の強度の変化を表す。受信トリガ信号は、送信クロック信号の周期と受信トリガ信号の周期が一致するタイミングを通知する信号である。従って、ベースバンドアナログ信号は、受信信号を受信トリガ信号の周波数と同じ周波数になるように時間方向に伸張した信号となる。
【0020】
ベースバンドアナログ信号は受信信号を伸張した信号であるので、受信アンテナ14に到達した反射波の強度を、送信アンテナ13から目標を介した受信アンテナ14までの距離の関数に変換できる。ベースバンドアナログ信号の強度は、あるパルスが送信されてからそのパルスの反射波が受信されるまでの間に送信されたUWBが進むことができる距離に対応付けられる。例えば、送信クロック信号によるパルスの繰り返し周波数が10MHzである場合、光速が3×108(m/s)であるので、3×108(m/s)/10MHzより、受信波は、送信アンテナ13から30m以下の距離を進んで受信アンテナ14に到達する。つまり、送信クロック信号が10MHzのレーダパルスを用いた場合、1つのベースバンドデジタル信号は、送信アンテナ13から目標を介した受信アンテナ14までの距離が30m以下の様々な値となる反射波を受信することにより得られる信号であると考えられる。
【0021】
さらに、データ集録部23は、ベースバンドアナログ信号をデジタル化して、ベースバンドデジタル信号を生成する。前述のとおり、ベースバンドアナログ信号は距離の関数に変換できるので、デジタル化の際のサンプリング数により、物体検出装置10の距離分解能が変動する。以下の記載では、分かりやすくするために、1つのベースバンドデジタル信号中での強度は、距離の関数として表現する。
【0022】
データ集録部23は、生成したベースバンドデジタル信号をメモリ31に出力する。また、検波部22から入力されたデータのうちで、すでに出力されたベースバンドデジタル信号の生成に用いられたデータを廃棄する。なお、以下の説明で、ベースバンドデジタル信号が生成される周期を「ベースバンド周期」と記載することがある。ベースバンド周期は、受信トリガ信号の周期と同じである。
【0023】
図3は、データ集録部23aで生成されるベースバンドデジタル信号の例を示す図である。図3(a)は、時刻T1にデータ集録部23aから出力されたベースバンドデジタル信号の強度を示す。図3(a)の横軸は、送信アンテナ13から目標を介して受信アンテナ14aに到達するまでの距離を表す。なお、図3(a)の横軸のメモリは、レンジビン単位である。ここで、レンジビンは、距離を算出する際の最小処理単位である。
【0024】
ベースバンドデジタル信号は、受信トリガ信号がデータ集録部23aに入力されるたびにメモリ31aに出力される。時刻Tn(nは1以上の整数)に受信トリガ信号がデータ集録部23aに入力されたとすると、時刻Tnに対応付けて、ベースバンドデジタル信号が1つずつメモリ31aに出力される。ここでは、時刻T2に図3(b)、時刻T3に図3(c)のベースバンドデジタル信号がメモリ31aに出力され、時刻T9に図3(d)の信号が出力されたとする。なお、受信アンテナ14b、受信部20b、およびメモリ31bの動作も、図2と図3を参照して説明した処理と同様である。
【0025】
次に、移動物体検出部40の動作について説明する。移動物体検出部40は、例えば、歩いている人間などの移動物体を検出するために用いられる。移動物体検出部40は、解析を開始する開始時間から第1の時間が経過するまでの間に得られたベースバンドデジタル信号を解析する。第1の時間は、移動物体が1つの計測位置を通過するまでにかかる時間以下の時間である。以下、歩いている人間が移動物体の場合を例として、第1の時間の上限値の計算方法を示す。人が移動するときの速度を時速4km/h程度とすると、次式より、秒速1.1m/sとなる。
4000m/(60分×60秒)=1.1m
【0026】
移動物体が、歩いている人の場合、人間のレンジ方向の寸法や手足の動きを考慮すると、移動物体の大きさは約0.5mとなる。従って、ある測定位置を人間が通過するまでにかかる時間は、次式より約0.45秒となる。
0.5(m)/1.1(m/S)=0.4545秒
そこで、歩いている人を検出する場合、第1の時間の上限値は約0.45秒である。第1の時間は、0.45秒以下で、移動物体検出部40が処理しやすい数のベースバンドデジタル信号が得られる時間に設定される。例えば、ベースバンド周期が0.05秒である場合、第1の時間の上限値が0.45秒であれば、0.45(s)/0.05(s)=9より、第1の時間の上限値までに9個のベースバンドデジタル信号が生成される。検出の開始時刻にベースバンドデジタル信号が生成されているとすると、検出の開始時刻から第1の時間の上限が経過するまでの間に10個のベースバンドデジタル信号が生成される。従って、移動物体検出部40が1回の検出処理に用いることができるベースバンドデジタル信号の数は10以下である。以下に説明するように、移動物体検出部40での処理では、フーリエ変換が用いられるため、1度の検出処理で用いられるベースバンドデジタル信号の数は、2の累乗の値であることが好ましい。以下の説明では、1回の検出に用いるベースバンドデジタル信号の数は、例えば、上限値までに生成されるベースバンドデジタル信号の数以下で、最も大きな2の累乗値に設定されているものとする。信号取得部41は、予め、1回の検出処理に用いるベースバンドデジタル信号の数を記憶している。また、オペレータが、第1の時間を求めて、信号取得部41に第1の時間を記憶させることもできる。信号取得部41は、第1の時間の間に生成されたベースバンドデジタル信号をメモリ31から取得する。
【0027】
経時変化取得部42は、開始時刻から第1の時間が経過するまでの受信信号の強度の経時変化を、レンジビンごとに求める。計算部43は、経時変化の波形を周波数スペクトルに変換する。さらに、計算部43は、周波数スペクトルでの周波数が正の値をとるデータの強度の合計値を計算する。検出部44は、計算部43で得られた合計値を、移動物体検出閾値と比較して、移動物体を介した送信アンテナ13から受信アンテナ14までの距離を求める。また、検出部44は、予め、移動物体検出閾値や、捕捉する対象の大きさを記憶している。そこで、検出部44は、計算部43から複数の距離が算出された場合に、得られた距離は同一の移動物体に対応するかを確認する。移動物体検出部40、経時変化取得部42、計算部43、検出部44で行われる処理については、後で詳しく説明する。
【0028】
微動物体検出部50は、座っている人間などの微動物体を検出する。移動物体検出部40は、解析を開始する開始時間から第2の時間が経過するまでの間に得られたベースバンドデジタル信号を解析する。第2の時間は、微動物体の動きの検出に用いられる数のベースバンドデジタル信号が生成されるのにかかる時間以上の時間である。また、第2の時間は、第1の時間よりも長い時間である。第2の時間を決定するためには基準値が用いられ、この基準値は、微動物体の動きの周波数と、微動物体の動きの観測回数の積に応じて決定される。例えば、座っている人や立っている人の体の揺れの周期が約3秒である場合、揺れの周波数は0.3Hz程度である。例えば、0.3Hzの周波数の動きを、微動物体検出部50は、20周期の間観測するとする。すると、0.3Hz×20回=6秒より、第2の時間を求めるための基準値は6秒となる。
【0029】
例えば、第2の時間の基準値が6秒でベースバンド周期が0.05秒である場合、第2の時間の基準値の間に生成されるベースバンドデジタル信号の数は、6(s)/0.05(s)=120となる。検出の開始時刻にベースバンドデジタル信号が生成されているとすると、検出の開始時刻から第2の時間の基準値が経過するまでの間に121個のベースバンドデジタル信号が生成されていることになる。オペレータは、予め、第2の時間の基準値で生成されるベースバンドデジタル信号の数に近い値に、微動物体検出部50が1回の検出処理に用いるベースバンドデジタル信号の数を設定し、信号取得部51に記憶させる。後述するように、微動物体検出部50での処理でも、フーリエ変換が用いられるため、微動物体検出部50が1度の検出処理に用いるベースバンドデジタル信号の数は、2の累乗の値であることが好ましい。以下の説明では、微動物体検出部50が1度の検出に用いるベースバンドデジタル信号の数は、2の累乗値のうちで、基準値の間に得られるベースバンドデジタル信号の数に近い値に設定されているものとする。従って、第2の時間は、微動物体検出部50が処理しやすい数のベースバンドデジタル信号を取得することができる時間で、かつ、基準値に近い値である。さらに、オペレータは、微動物体検出部50が1回の検出に用いるベースバンドデジタル信号の数とベースバンド周期から第2の時間を算出し、信号取得部51に記憶させることができる。信号取得部51は、記憶している数以上のベースバンドデジタル信号がメモリ31に記憶されていると、ベースバンドデジタル信号を取得する。
【0030】
経時変化取得部52は、開始時刻から第2の時間が経過するまでの受信信号の強度の経時変化を、レンジビンごとに求める。計算部53は、経時変化取得部52で求められた経時変化の波形を周波数スペクトルに変換する。さらに、計算部53は、予め決められた周波数の範囲において周波数スペクトルの強度の合計値を計算する。検出部54は、合計値と微動物体検出閾値の比較結果に基づいて、目標を介した送信アンテナ13から受信アンテナ14までの距離を求める。検出部54は、予め、微動物体検出閾値や捕捉する対象の大きさを記憶している。検出部54は、計算部53から複数の距離が算出された場合に、同一の微動物体が複数回検出されている可能性があるかを確認する。微動物体検出部50、経時変化取得部52、計算部53、検出部54で行われる処理については、後で詳しく説明する。
【0031】
移動物体角度計算部32は、移動物体検出部40aで得られた距離と、移動物体検出部40bで得られた距離を取得する。移動物体角度計算部32は、取得した距離を用いて、物体検出装置10から見た移動物体の方向を計算する。例えば、移動物体角度計算部32は、受信アンテナ14aと受信アンテナ14bを結ぶ直線と、送信アンテナ13と移動物体とを結ぶ直線がなす角度を計算する。移動物体角度計算部32は、検出された移動物体の各々について、送信アンテナ13から移動物体までの距離も計算する。移動物体角度計算部32は、計算結果を表示部15に出力する。移動物体角度計算部32で行われる計算については、後で詳しく述べる。
【0032】
微動物体角度計算部33は、微動物体検出部50aで得られた距離と、微動物体検出部50bで得られた距離を取得する。さらに、微動物体角度計算部33は、取得された距離を用いて、物体検出装置10から見た微動物体の方向を計算する。例えば、微動物体角度計算部33は、受信アンテナ14aと受信アンテナ14bを結ぶ直線と、送信アンテナ13と微動物体とを結ぶ直線がなす角度を計算する。さらに、微動物体角度計算部33は、送信アンテナ13と微動物体の間の距離も計算する。微動物体角度計算部33は、計算結果を表示部15に出力する。微動物体角度計算部33で行われる計算についても、後で詳しく述べる。
【0033】
表示部15は、移動物体角度計算部32と微動物体角度計算部33から得られたデータを表示する。表示部15は、例えば、ディスプレイなど、データをユーザに視覚的に提示することができる任意の装置である。
【0034】
〔移動物体の検出〕
以下、移動物体検出部40で行われる移動物体の検出について説明する。この例では、移動物体検出部40が1度に処理するベースバンドデジタル信号の数は8個である。また、第1の時間は、ベースバンド周期が0.05秒であるので、0.05秒×(8−1)回=0.35秒とする。ここで、検出の開始時刻にベースバンドデジタル信号が生成されているので、第1の時間は、7回のベースバンド周期となる。
【0035】
例えば、図3に示すようなベースバンドデジタル信号がメモリ31aに格納されているとする。
(1)信号取得部41は、メモリ31に記憶されているベースバンドデジタル信号の数と、移動物体検出部40で行われる1回の検出処理に用いられるベースバンドデジタル信号の数を比較する。メモリ31に記憶されているベースバンドデジタル信号の数が1回の検出処理に用いられるベースバンドデジタル信号の数未満であれば、信号取得部41は待機する。ここでは、1回の検出に8個のベースバンドデジタル信号が用いられるので、信号取得部41は、時刻T1から時刻T7まで待機する。時刻T8になると8個のベースバンドデジタル信号がメモリ31に記憶されるので、信号取得部41は、時刻T1を処理の開始時刻とし、時刻T8を検出時間とする。
【0036】
(2)信号取得部41は、開始時刻から第1の時間が経過するまでに生成されたベースバンドデジタル信号を取得する。図4(a)は、移動物体検出部40が8個のベースバンドデジタル信号を用いて検出を行う場合に取得されるベースバンドデジタル信号の例を示す。図4(a)に示すように、信号取得部41は、時刻T1〜T8に生成された8つのベースバンドデジタル信号を取得する。
【0037】
(3)経時変化取得部42は、検出に用いられるベースバンドデジタル信号について、レンジビンごとの受信強度の経時変化を求める。例えば、経時変化取得部42は、図4(a)に示す8つのベースバンドデジタル信号から、図4(b)の太線に示すように、レンジビンごとの受信強度の経時変化を求める。図5(a)は、レンジビンR1〜R9の9つのレンジビンでの受信強度の経時変化の例を示す。図5の例では、レンジビンR5での受信強度が他のレンジビンでの受信強度よりも高くなっている。なお、各レンジビンで得られた受信強度には、移動物体から反射したレーダの強度と、静止物体から反射したレーダの強度の両方が含まれている。
【0038】
(4)計算部43は、経時変化取得部42により得られた経時変化を、レンジビンごとにフーリエ変換する。すなわち、計算部43は、経時変化の波形に含まれている周波数の成分ごとの強度を示す周波数スペクトルを、レンジビンごとに生成する。ここで、周波数スペクトルに含まれる周波数の上限は、ベースバンドデジタル信号の生成される周波数であり、周波数の下限はベースバンドデジタル信号が生成される周波数に−1をかけた値となる。例えば、ベースバンドデジタル信号が0.05秒ごとに生成される場合、計算部43は、−20Hzから20Hzの範囲にわたる周波数スペクトルを生成する。また、フーリエ変換を行うときのポイント数によって、周波数バンクの大きさは変動する。ここで、周波数バンクは、周波数スペクトルに含まれる周波数の範囲をポイント数で割った値であり、フーリエ変換が行われたポイント間の周波数の差を示す。例えば、−20Hzから20Hzの範囲にわたる周波数スペクトルについて8ポイントのフーリエ変換が行われる場合、周波数バンクは、5Hzになる。
【0039】
図5(b)に計算部43によって生成された周波数スペクトルの例を示す。図5(b)に示すように、レンジビンR1〜R9のいずれでも、0Hzを中心として線対称な周波数スペクトルが得られる。−5〜0Hzの周波数バンクと、0〜5Hzの周波数バンクは、静止物体から反射したレーダの強度を含んでいる。
【0040】
(5)計算部43は、各レンジビンの周波数スペクトルについて、0Hzを含む周波数バンクを除いて、予め決められた周波数バンクでの強度を合計して合計値を求める。ここで、合計値を求めるために用いる周波数バンクの範囲は任意に変更することができ、合計される周波数バンクの数や周波数の範囲に応じて移動物体検出閾値の値が決定される。
【0041】
図6は、計算部43の動作の例を説明する図である。図6は、正の周波数の周波数バンクでの受信強度の合計値を求める場合の例を示している。例えば、図6に示す各レンジビンでの周波数スペクトルについて、計算部43は、予め決められた範囲63(63a〜63i)で示した部分の受信強度の合計値を求めるとする。計算部43は、得られた結果を検出部44に出力する。
【0042】
(6)検出部44は、各レンジビンについて得られた合計値を移動物体検出閾値と比較し、合計値が移動物体検出閾値以上のレンジビンがあれば、そのレンジビンに対応する位置で移動物体が検出されていると判定する。例えば、図7に、予め決められた周波数バンクでの受信強度の合計値の例を示す。図7では、レンジビンR5での合計値が移動物体検出閾値を上回っている。この場合、検出部44は、送信アンテナ13から移動物体を介して受信アンテナ14aに到達するまでの距離はレンジビンR5で表される距離であると判定する。検出部44は、レンジビンの番号を記憶する。なお、検出部44は、レンジビンの番号に基づいて、送信アンテナ13から移動物体を介した受信アンテナ14aまでの距離を求めて、得られた距離を記憶することもできる。
【0043】
検出部44は、予め、捕捉対象の移動物体の大きさを記憶しているものとする。計算部43において、複数のレンジビンの番号が通知された場合、移動物体の大きさと、通知されたレンジビン同士の距離を比較する。通知されたレンジビン同士の距離が、捕捉対象の移動物体の大きさ以下である場合、検出部44は、1つの移動物体が検出されたと判定し、複数のレンジビンでのデータを適宜、マージする。例えば、レンジビンR4とR5で移動物体が見られたと計算部43から通知されたとする。もし、移動物体の大きさが2つのレンジビンにまたがる大きさであれば、計算部43は、検出された移動物体は1つであると判定する。この場合、レンジビンR4とR5のうち、受信強度の合計値が大きい方のレンジビンで移動物体が検出されたと判定し、受信強度の合計値が小さい方についてのデータを破棄する。
【0044】
一方、通知された2つのレンジビン同士の距離が、捕捉対象の移動物体の大きさよりも大きい場合、検出部44は、2つの移動物体が検出されたと判定する。この場合、検出部44は、計算部43から通知された2つのデータの双方を格納し、適宜、移動物体角度計算部32に出力する。ここで、出力される検出結果は、時刻T8での検出結果として扱われる。検出部44は、移動物体角度計算部32に出力したデータを、廃棄する。このため、検出部44は、1回の検出で得られたデータを記憶することはあるが、複数の検出の結果を記憶することは無い。例えば、時刻T1〜T8での検出結果は、検出部44が時刻T8での検出結果を移動物体角度計算部32に出力するまでは検出部44に格納されている。しかし、時刻T2〜T9のベースバンドデジタル信号が処理されるときは、検出部44は、時刻T1〜T8での検出結果を記憶していない。
【0045】
メモリ31aから取得されたベースバンドデジタル信号を用いた検出が終わると、移動物体検出部40は、取得したベースバンドデジタル信号のうち、最も早い時刻に生成された信号を廃棄する。さらに、移動物体検出部40は、前回取得したベースバンドデジタル信号のうちで最後に生成された信号の次に生成された信号を、メモリ31aから取得して、検出を継続する。例えば、時刻T1〜T8に生成されたベースバンドデジタル信号を用いた検出処理が終わると、移動物体検出部40は、時刻T1に生成されたベースバンドデジタル信号を廃棄して、時刻T9に生成されたベースバンドデジタル信号を取得する。その後、移動物体検出部40では、時刻T2〜T9に生成されたベースバンドデジタル信号を用いた検出処理が行われる。また、以上の説明は、受信アンテナ14aから受信された信号に基づいた移動物体検出部40aについて述べたが、移動物体検出部40bは、受信アンテナ14bからの信号を用いて移動物体検出部40aと同様の処理を行う。なお、移動物体検出部40は、検出結果の出力が終わると、取得したベースバンドデジタル信号を全て廃棄して、新たに処理対象の時刻のベースバンドデジタル信号を取得しても良い。
【0046】
図8Aと図8Bは、移動物体検出部で行われる処理の例を説明するフローチャートである。なお、図8Aと図8Bに示すフローチャートは一例であって、例えば、ステップS13とS14の順番が入れ替えられるなど、移動物体検出部40で行われる処理は、実装に応じて適宜、変更される場合がある。また、図8Aと図8Bは、移動物体検出部40が検出後に取得したベースバンドデジタル信号を全て廃棄して、新たに処理対象の時刻の信号を取得する場合の動作を説明している。定数Nは、フーリエ変換のポイント数である。変数tは、検出時刻を示す。変数nは、取得されたベースバンドデジタル信号の数の計数に用いられる。変数rは、処理されるレンジビンの番号を表す。変数tnは、1回の処理で検出された移動物体の数の計数に用いられる。
【0047】
移動物体の検出が開始されると、信号取得部41は、変数nを0、変数tをNに設定する(ステップS1)。信号取得部41は、メモリ31からt−n番目のベースバンドデジタル信号を取得し、nの値を1つインクリメントする(ステップS2、S3)。さらに、信号取得部41は、変数nがN未満かを確認する(ステップS4)。変数nがN未満の場合、ステップS2〜S4の処理が繰り返される。一方、変数tがN以上の場合、信号取得部41はベースバンドデジタル信号の取得を中止して、それまでに取得したベースバンドデジタル信号を経時変化取得部42に出力する。
【0048】
経時変化取得部42は、変数rを1に設定する(ステップS5)。さらに、経時変化取得部42は、信号取得部41から入力されたベースバンドデジタル信号のr番目のレンジビンでの信号の強度を読み取り、信号強度の経時変化を求める(ステップS6)。経時変化取得部42は、r番目のレンジビンでの強度の経時変化を表すデータを計算部43に出力する。計算部43は、r番目のレンジビンでの強度の経時変化をフーリエ変換し、経時変化の波形を基にした周波数スペクトルを生成する(ステップS7)。計算部43は、r番目のレンジビンの周波数スペクトルについて、0Hzを含む周波数バンクを除く周波数バンクでの強度の合計値を計算し、格納する(ステップS8、S9)。その後、計算部43は、rを1つインクリメントして、レンジビンの最大値(range_max)と比較する(ステップS10、S11)。rがレンジビンの最大値より大きくなるまで、ステップS6〜S11の処理が繰り返される。
【0049】
変数rがレンジビンの最大値より大きくなると、検出部44は、格納されている合計値を取得し、変数rを再度、1に設定する(ステップS12、S13)。検出部44は、変数tnを1に設定する(ステップS14)。検出部44は、r番目のレンジビンでの合計値と移動物体検出閾値を比較する(ステップS15)。合計値が移動物体検出閾値よりも大きい場合、検出部44は、移動物体の数tnが2未満であるかを確認する(ステップS15でYes、ステップS16)。移動物体の数が2未満である場合、検出部44は、1番目の移動物体のデータとして計算部43から得られたデータを記憶する(ステップS18)。さらに、検出部44は、変数tnを1つインクリメントする(ステップS19)。
【0050】
一方、移動物体の数が2以上である場合、検出部44は、tn番目の移動物体とtn−1番目に検出された移動物体との間の距離を算出し、両者の距離が捕捉しようとする移動物体の大きさより大きいかを判定する(ステップS17)。両者の距離が捕捉しようとする移動物体の大きさよりも大きい場合、検出部44は、tn番目の移動物体が検出されたと判定してデータを格納する(ステップS17でYes、ステップS18)。検出部44は、さらに、変数tnを1つインクリメントする(ステップS19)。ステップS17で、tn番目の移動物体とtn−1番目に検出された移動物体との間の距離が捕捉しようとする移動物体の大きさより小さいと判定されると、検出部44は、tn番目の移動物体とtn−1番目に検出された移動物体をマージする(ステップS17でNo)。
【0051】
ステップS15〜S19の処理が終わると、検出部44は、rの値を1つインクリメントしてからレンジビンの最大値と比較する(ステップS20、S21)。rがレンジビンの最大値より大きくなるまで、ステップS15〜S21の処理が繰り返される。
【0052】
rがレンジビンの最大値より大きくなると、検出部44は、現在取得されているベースバンドデジタル信号処理は終わったと判断して、その旨を信号取得部41に通知する。信号取得部41は、tの値をメモリ31に記録されているベースバンドデジタル信号の総数(t_max)と比較する(ステップS22)。tの値がt_maxよりも大きい場合、全てのデータの処理が終わっているので、移動物体検出部40の処理は終了する(ステップS22でYes)。一方、tの値がt_max以下の場合、検出部44は、ステップS18で移動物体と判定された物体が検出されたレンジビンの番号を、時刻tでの検出結果として移動物体角度計算部32に出力する(ステップS23)。さらに、信号取得部41は、現在のtの値1つインクリメントし、変数nを0に変更する(ステップS24)。ステップS22において、tの値がt_maxよりも大きいと判定されるまで、ステップS2〜ステップS24の処理が繰り返される。ステップS2〜S24の処理の繰り返しにより、移動物体の位置の変化の軌跡が求められ、移動物体の追跡が行われる。
【0053】
〔微動物体の検出〕
次に、微動物体の検出方法について説明する。ここでは、受信部20aで時刻T1〜T9に生成されたベースバンドデジタル信号は、図3に示すような信号であるものとする。さらに、時刻T10には図9(a)、時刻T11には図9(b)に示すベースバンドデジタル信号が生成され、時刻T128には図9(c)、時刻T129には図9(d)に示すようなベースバンドデジタル信号が生成されたとする。この場合、メモリ31aには、時刻T1〜T9までの図3(a)〜図3(d)のベースバンドデジタル信号と、時刻T10以降の図9(a)〜図9(d)に示すベースバンドデジタル信号が記憶されている。ここでは、微動物体検出部50が1度に処理するベースバンドデジタル信号の数は128個であるものとする。また、ベースバンド周期が0.05秒であるものとする。すると、第2の時間は、128個のベースバンドデジタル信号を取得することができるように、ベースバンド周期の127倍、すなわち、0.05秒×127回=6.35秒とする。
【0054】
(1)メモリ31aに記憶されているベースバンドデジタル信号の数が微動物体検出部50aでの1回の検出処理に用いられるベースバンドデジタル信号の数になるまで、信号取得部51aは待機する。ここでは、微動物体検出部50aでの1回の検出に128個のベースバンドデジタル信号が用いられるので、信号取得部41aは、時刻T128まで待機する。時刻T128になると信号取得部51は、時刻T1を処理の開始時刻とし、時刻T128を検出時間とする。
【0055】
(2)信号取得部51aは、開始時刻から第2の時間が経過するまでに生成されたベースバンドデジタル信号を取得する。この処理により、信号取得部51aは、1回の検出に用いる数のベースバンドデジタル信号をメモリ31aから取得する。ここでは、微動物体検出部50aは、図3と図9(a)〜図9(c)に示すベースバンドデジタル信号を含む128個のベースバンドデジタル信号を取得する。
【0056】
(3)経時変化取得部52aは、信号取得部51aで取得されたベースバンドデジタル信号について、レンジビンごとの受信強度の経時変化を求める。経時変化取得部52aで行われる経時変化の求め方は、経時変化取得部42での経時変化の求め方と同様である。得られた経時変化の例を図10(a)に示す。図3に示したように、時刻T1などでは一部のレンジビンで、移動物体からの反射による受信強度の上昇が見られるが、経時変化取得部52aでは、時刻T1〜T128などの長い時間の経時変化が取得されるため、移動物体の影響は小さくなっている。つまり、経時変化取得部52aで得られた経時変化の波形は、微動物体の移動による反射波の変化と、静止物体からの反射波の影響を大きく受けているといえる。
【0057】
(4)計算部53aは、経時変化取得部52aにより得られた経時変化をレンジビンごとにフーリエ変換することにより、レンジビンごとの周波数スペクトルを生成する。なお、計算部43により生成される周波数スペクトルと同様に、周波数スペクトルに含まれる周波数の上限は、ベースバンドデジタル信号が生成される周波数であり、周波数の下限はベースバンドデジタル信号が生成される周波数に−1をかけた値となる。また、フーリエ変換を行うときのポイント数によって、周波数バンクの大きさは変動する。例えば、計算部53が128ポイントのフーリエ変換により−20Hzから20Hzの範囲の周波数スペクトルを生成すると、周波数バンクは0.3125Hzとなる。
【0058】
(5)計算部53aは、各レンジビンの周波数スペクトルについて、0Hzを含む周波数バンクを除いて、予め決められた周波数バンクでの強度を合計して合計値を求める。ここで、微動物体による動作が観測される周波数が予め予測できている場合、計算部53aは、予測される周波数の範囲の周波数バンクの強度の合計値を求める。例えば、計算部53aは、第1の閾値よりも低い周波数の周波数バンクでの強度の合計値を求めることができる。ここで、第1の閾値は、例えば、微動物体の動作の周波数の上限値とされる。なお、計算部53aは、予め、第1の閾値や合計値を求める周波数バンクを記憶しているものとする。図10(b)の例では、計算部53aは、周波数範囲60(60a〜60i)の周波数バンクでの強度の合計値を計算するものとする。図11に、レンジビンごとの合計値の例を示す。計算部53aは、検出部54aに得られた結果を出力する。
【0059】
(6)検出部54aは、各レンジビンについて得られた合計値を、微動物体検出閾値と比較する。微動物体検出閾値は、微動物体の検出に用いられる合計値の大きさを表す。検出部54aは、合計値が微動物体検出閾値以上であれば、微動物体が検出されたと判定する。図11の例では、レンジビンR4〜R6で合計値が微動物体検出閾値を超えているので、レンジビンR4〜R6に微動物体が検出される。
【0060】
検出部54aは、複数のレンジビンで微動物体が検出されると、微動物体が検出されたレンジビンの番号から、微動物体が検出された位置の間の距離を求める。さらに、捕捉される微動物体の大きさと微動物体が検出された位置の距離を比較し、検出された微動物体が1つであるか、複数であるかを判定する。この判定方法は、検出部44と同様である。
【0061】
検出部54aは、微動物体の検出結果を微動物体角度計算部33に出力する。さらに、検出部54aは、微動物体角度計算部33に出力したデータを、廃棄する。このため、検出部54aは、1回の検出で得られたデータを記憶することはあるが、複数の検出の結果を記憶することは無い。例えば、時刻T1〜T128での検出結果は、検出部54aが時刻T128での検出結果を微動物体角度計算部33に出力するまでは検出部54aに格納されている。しかし、時刻T2〜T129のベースバンドデジタル信号が処理されるときは、検出部54aは、時刻T1〜T128での検出結果を記憶していない。
【0062】
なお、ここでは、微動物体検出部50aの動作について説明したが、微動物体検出部50bもメモリ31bに格納されているベースバンドデジタル信号について、微動物体検出部50aと同様に処理する。
【0063】
図12Aと図12Bは、微動物体検出部50の動作の例を説明するフローチャートである。信号取得部51は、計算部53で行われるフーリエ変換のポイント数(N2)と同数のベースバンドデジタル信号を用いて微動物体を検出するものとする。また、変数tmは、1回の検出処理で検出される微動物体の数の計数に用いられる。
【0064】
微動物体の検出が開始されると、信号取得部51は、変数tをN2に設定し、変数nを0に設定する(ステップS31)。信号取得部51は、t−n番目のベースバンドデジタル信号を取得して、nを1つインクリメントする(ステップS32、S33)。信号取得部51は、nとN2の値を比較し、nがN2以上になるまでベースバンドデジタル信号の取得を繰り返す(ステップS34)。
【0065】
nがN2以上になると、経時変化取得部52は、変数rを1に設定する(ステップS35)。その後、経時変化取得部52は、r番目のレンジで観測された信号強度の経時変化を取得し、計算部53に出力する(ステップS36)。計算部53は、入力された経時変化の波形をフーリエ変換して周波数スペクトルを生成し、微動物体の動作の周波数を含む範囲の周波数バンクの強度の合計値を求め、記憶する(ステップS37〜S39)。次に、計算部53は、rを1つインクリメントして、レンジビンの番号の最大値(range_max)と比較する(ステップS40、S41)。全てのレンジビンについて合計値が求められるまで、ステップS36〜S41の処理が繰り返される。
【0066】
変数rがレンジビンの番号の最大値より大きくなると、検出部54は、各レンジビンについて求められた合計値を取得し、変数rを1に設定する(ステップS42、S43)。検出部54は、tmの値を1に設定する(ステップS44)。検出部54は、合計値を微動物体検出閾値と比較する(ステップS45)。合計値が微動物体検出閾値より大きい場合、検出部54は、変数tmの値が2未満であるかを確認する(ステップS46)。tmが2以上の場合、複数のレンジビンで微動物体が検出されているので、検出部54は、捕捉する微動物体の大きさと、微動物体が検出されたレンジビンの間の距離を比較し、複数のレンジビンで検出された微動物体は同一であるかを確認する(ステップS47)。微動物体が検出されたレンジビン同士の距離が微動物体の大きさより大きい場合、検出部54は、tm番目の微動物体が検出されたと判定してtmの値を1つインクリメントする(ステップS48、S49)。その後、検出部54は、rの値をインクリメントする(ステップS50)。一方、微動物体が検出されたレンジビン同士の距離が微動物体の大きさ以下の場合、ステップS48、S49の処理は行われずに次のレンジビンが処理対象となる(ステップS47でNo、ステップS50)。その後、検出部54は、rの値をレンジビンの番号の最大値と比較する(ステップS51)。検出部54は、全てのレンジビンについてステップS45〜S51の動作を行う。一方、合計値が微動物体検出閾値以下の場合、ステップS46〜S49の処理が行われずに、ステップS50以下の処理が行われる(ステップS45でNo)。
【0067】
信号取得部51は、tの値をメモリ31に記憶されているベースバンドデジタル信号の総数(t_max)と比較する(ステップS52)。変数tの値がt_max以下の場合、信号取得部51は、現在の処理で得られた結果を微動物体角度計算部33に出力する(ステップS53)。さらに、変数tの値を1つインクリメントし、変数nを0に変更する(ステップS54)。変数tの値がt_maxを超えるまで、ステップS31〜S54の処理が繰り返される。ステップS31〜S54の処理の繰り返しにより、微動物体が存在する時間の長さや位置の変動などの、微動物体の存在位置の変化の軌跡が求められ、微動物体の追跡が行われる。
【0068】
〔目標の位置の特定〕
移動物体角度計算部32は、移動物体検出部40a、40bから入力されたデータに基づいて、移動物体の位置を特定する。上記の例では、移動物体角度計算部32は、時刻T8のベースバンドデジタル信号が処理されてから、ベースバンド周期ごとに移動物体検出部40からデータを受け取り、移動物体の位置を特定する。
【0069】
一方、微動物体角度計算部33は、微動物体検出部50a、50bから入力されたデータに基づいて、微動物体の位置を特定する。上記の例では、微動物体角度計算部33は、時刻T128のベースバンドデジタル信号が処理されてから、ベースバンド周期ごとに微動物体検出部50からデータを受け取り、微動物体の位置を特定する。従って、時刻T1〜T127のベースバンドデジタル信号が処理されている間は、移動物体だけが検出され、時刻T128以降のベースバンドデジタル信号が処理されると、移動物体と微動物体の両方が検出される。最初に移動物体と微動物体の両方が検出されるとき、移動物体検出部40では、時刻T121〜T128のベースバンドデジタル信号に基づいて得られたデータが処理され、微動物体検出部50では、時刻T1〜T128のベースバンドデジタル信号に基づいて得られたデータが処理される。
【0070】
以下、移動物体角度計算部32で行われる処理を詳しく説明する。なお、微動物体角度計算部33が微動物体の位置を特定する際に行う処理は、移動物体角度計算部32が移動物体の位置を特定する際に行う処理と同様である。
【0071】
図13は、移動物体角度計算部32が保持するデータの例を示すテーブルである。移動物体角度計算部32は、データの通し番号と、アンテナ番号、距離を保持する。アンテナ番号は、受信アンテナ14aと14bのいずれで受信された受信波に基づいて検出された距離であるかを表す。ここでは、受信アンテナ14aでの受信波に基づいて得られた距離についてはアンテナ番号を1とし、受信アンテナ14bでの受信波に基づいて得られた距離についてはアンテナ番号を2とするものとする。従って、移動物体角度計算部32は、移動物体検出部40aから入力された距離に、アンテナ番号=1を対応付ける。一方、移動物体検出部40bから入力された距離に対して、移動物体角度計算部32は、アンテナ番号=2を対応付ける。
【0072】
図14は、目標の位置を特定する方法の例を説明する図である。図14の例では、送信アンテナ13から目標65にレーダパルスが送信され、目標65からの反射波が受信アンテナ14a、14bで受信されているものとする。移動物体検出部40aからで求められた距離は、目標65を介した送信アンテナ13から受信アンテナ14aまでの距離であるので、L1である。一方、移動物体検出部40bでは、目標65を介した送信アンテナ13から受信アンテナ14bまでの距離が求められるので、移動物体検出部40bではL2が求められる。また、送信アンテナ13と受信アンテナ14aの間の距離をd1、送信アンテナ13と受信アンテナ14bの間の距離をd2とする。従って、図14に含まれている数値のうち、L1、L2、d1、d2は、測定可能な数値である。
【0073】
図14に示すように、送信アンテナ13から目標65までの距離をD1、受信アンテナ14aから目標65までの距離をD2、受信アンテナ14bから目標65までの距離をD3とする。さらに、受信アンテナ14aと受信アンテナ14bを結ぶ直線と、送信アンテナ13と目標65を結ぶ直線がなす角度をθとする。移動物体角度計算部32は、図13のテーブル中の2つの距離の値を用いて、移動物体について、θとD1の値を求める。
【0074】
まず、移動物体角度計算部32は、移動物体検出部40aから入力された距離と移動物体検出部40bから入力された距離のうち、同一の移動物体を介した距離の組み合わせを決定する。同一の目標65について、L1の長さとL2の長さの差は、2つの受信アンテナ14の間の距離(d1+d2)よりも小さくなる。すなわち、以下の関係が成り立つ。
【0075】
【数1】
【0076】
例えば、d1+d2の値が0.5mだとする。図13のNo.1のデータは、受信アンテナ14aでの受信波の処理により3.0mという距離が得られている。また、No.2のデータは、受信アンテナ14bでの受信波の処理結果から3.1mという値が得られている。この場合、No.1とNo.2の組み合わせは(1)式の関係を満たすので、移動物体角度計算部32は、No.1とNo.2のデータは同一の移動物体に基づいて得られたと判定する。同様の処理により、図13のテーブルでは、以下の3つの移動物体が検出されていると判定される。
a) No.1とNo.2のデータの組み合わせで特定される移動物体
b) No.3とNo.4のデータの組み合わせで特定される移動物体
c) No.3とNo.5のデータの組み合わせで特定される移動物体
ここで、No.3のデータは2回使用されているが、この場合は、送信アンテナ13の位置と受信アンテナ14aの位置を焦点とした楕円上に2つの移動物体があると判定されている。
【0077】
以下、データの組み合わせを用いて移動物体の位置を特定するための計算について述べる。図14の図に示すように、L1、L2、D1、D2、D3の間には、(2)式と(3)式の関係が成り立つ。
【0078】
【数2】
【0079】
【数3】
【0080】
また、図14の三角形Aより(4)式が成り立つ。
【数4】
【0081】
同様に、図14の三角形Bより、(5)式が成り立つ。
【数5】
【0082】
(2)式と(3)式を変形すると、次のようになる
【数6】
【0083】
【数7】
【0084】
(6)式を(4)式に代入して変形すると以下のようになる。
【数8】
【0085】
【数9】
【0086】
また、(7)式を(5)式に代入して変形すると、以下のようになる。
【0087】
【数10】
【0088】
【数11】
【0089】
(9)式と(11)式より、
【数12】
【0090】
【数13】
従って、(13)式を(9)式もしくは(11)式に代入することによりD1が算出される。移動物体角度計算部32は、D1とθを表示部15に出力する。
【0091】
表示部15は、D1とθを用いて移動物体の位置をディスプレイに表示する。また、表示部15は、移動物体の位置を、xy座標などの他の座標系に変換して表示することもできる。微動物体角度計算部33も、移動物体角度計算部32と同様に微動物体検出部50a、50bから入力されたデータを処理して、微動物体と送信アンテナ13の間の距離と、微動物体と送信アンテナ13を結ぶ直線が2つのアンテナを結ぶ直線となす角度を算出する。また、微動物体角度計算部33も、得られた結果を表示部15に出力する。表示部15は、微動物体についても、移動物体と同様にディスプレイに位置を表示する。
【0092】
図15に、表示部15での表示例を示す。図15(a)では、物体検出装置10は、壁1を透過して、壁1の反対側にある移動物体と微動物体を検出する場合の例を示しているが、物体検出装置10は、壁透過レーダを備えたレーダ装置には限られない。ここでは、図15(a)に示すように、物体検出装置10が、移動物体70と微動物体75を1つずつ捕捉したとする。この場合、表示部15では、図15(b)に示すように、移動物体70の位置と微動物体75の位置が表示される。
【0093】
このように、物体検出装置10は、その物体からの反射波を観測する時間を変更する。例えば、移動物体は1つのレンジビンに存在する時間が短いので、物体検出装置10は、移動物体が1つのレンジビンにいる時間に観測された反射波を用いて移動物体を検出する。一方、微動物体は1つのレンジビンに存在する時間が移動物体に比べて長く、さらに、微動物体の動きの周波数が小さいため、物体検出装置10は、移動物体より長い時間にわたって反射波を観測することにより微動物体を検出する。言い換えると、物体検出装置10は、検出に用いるベースバンドデジタル信号の数を検出対象の物体の移動の速さに応じて変更している。物体検出装置10は、物体の移動の速さに応じて反射波を観測する時間の長さを変更することにより、移動物体と微動物体の両方を検出することができる。
【0094】
<第2の実施形態>
図16は、移動物体70の後ろに静止物体80がある場所で、移動物体と微動物体を捕捉した場合の例を説明する図である。図16の例では、物体検出装置10は、壁1aと壁1bにはさまれていて静止物体80を含む領域中の移動物体と微動物体を検出している。図16(a)は、移動物体70が移動する方向と、物体検出装置10と移動物体70を結ぶ直線とのなす角度が小さい場合の例を示している。この場合、移動物体70が移動することにより、物体検出装置10と移動物体70を結ぶ直線状に位置する静止物体80は、物体検出装置10から見え隠れすることがある。すなわち、静止物体80からの反射波は、移動物体70の動き方に応じて変動することがある。このように静止物体80の一部分が見え隠れするときの反射波の変動の周波数に応じて、物体検出装置10は、静止物体80の位置に、誤って微動物体を検出してしまうことがある。
【0095】
例えば、移動物体70が人間であるとすると、人間が図16(a)の矢印に示す方向に歩くときに、手や足を振ることにより静止物体80からの反射波の強度が変動する。この変動のために、静止物体80の位置に微動物体75がいるように見えるので、表示部15では、図16(b)に示す検出結果が表示される。そこで、第2の実施形態では、物体検出装置と移動物体70を結んだ先に静止物体80がある場合でも、誤検出を防ぐための物体検出装置について説明する。
【0096】
図17は、第2の実施形態に係る物体検出装置90の構成の例を示す図である。物体検出装置90は、制御部11、送信部12、送信アンテナ13、受信アンテナ14、受信部20、表示部15、および、データ処理部100を備える。データ処理部100は、微動物体検出部101(101a、101b)、および、微動物体判定部104(104a、104b)を備え、さらに、メモリ31、移動物体角度計算部32、微動物体角度計算部33、移動物体検出部40を備える。微動物体検出部101は、計算部102、検出部103、信号取得部51、および、経時変化取得部52を備える。
【0097】
以下、計算部102、検出部103、微動物体判定部104の動作について説明する。なお、以下の説明では、微動物体検出部101aと微動物体判定部104aの動作について説明するが、微動物体検出部101bと微動物体判定部104bの動作も同様である。また、信号取得部51と経時変化取得部52の動作は、第1の実施形態と同様である。さらに、移動物体検出部40、メモリ31、移動物体角度計算部32、微動物体角度計算部33、制御部11、送信部12、送信アンテナ13、受信アンテナ14、表示部15、受信部20で行われる動作も、第1の実施形態と同様である。
【0098】
図18は、周波数スペクトルの例を示す図である。図18(a)は、座っている人などの微動物体からの反射波の強度の経時変化に基づいて計算部102aが求めた周波数スペクトルの例である。なお、計算部102aが経時変化取得部52aから取得した経時変化から周波数スペクトルを求める方法は、第1の実施形態で計算部53aが周波数スペクトルを生成した方法と同様である。微動物体からの反射波の周波数スペクトルは、例えば、1.0Hz以下の比較的低い周波数領域の強度が強くなる。
【0099】
図18(b)は、移動物体70の移動により静止物体80から反射した反射波の周波数スペクトルの例を示す図である。移動物体70の影響による静止物体80からの反射波の強度の変化は、例えば、0.1Hz〜10Hzなど、微動物体からの反射波の周波数スペクトルに比べて広い範囲に渡ったピークが見られる。これは、静止物体80からの反射波が移動物体70の影響を受けているためである。移動物体70からの反射波の周波数スペクトルは、図18(c)に示すように、図18(b)と同様の広い範囲に渡ったピークを示す。従って、周波数スペクトルのうちの比較的高周波側での強度が高いスペクトルが観測される場合は、移動物体70の動きによって変動した静止物体80からの反射波を観測していることになる。
【0100】
そこで、例えば、計算部102aは、周波数スペクトルが求められた各レンジビンについて、第1の閾値よりも高い周波数領域の周波数バンクの強度の合計値と、第1の閾値よりも低い周波数領域の周波数バンクの強度の合計値の両方を求める。ここで、第1の閾値は、例えば、微動物体の動作により観測される受信強度の変化の上限値とすることができる。計算部102aは、予め、強度の合計値を求める周波数バンクを記憶しているものとする。例えば、計算部102aは、低い周波数領域での強度の合計値として0.2Hz〜1.0Hzでの合計値を求め、高い周波数領域での強度の合計値として1.0Hz〜10.0Hzでの合計値を求めることができる。なお、第1の閾値の周波数は、物体検出装置90で観測される微動物体に応じて決定される。例えば、微動物体が座っている人であれば、座っている人の呼吸による反射波の強度の変化の周波数とほぼ同じ値となる1.0Hzが境界として用いられる。
【0101】
図19は、計算部102が微動物体の検出に用いる周波数領域の例を説明する図である。図19(a)に示すように、計算部102aは、各レンジビンについて、低い周波数範囲61(61a〜61i)の周波数バンクでの強度の合計値と、高い周波数範囲62(62a〜62i)の周波数バンクでの強度の合計値を求める。図19(b)は、低い周波数範囲61の周波数バンクにおいて得られたスペクトラム強度の合計値をレンジビンの関数として示す図の例である。また、図19(c)は、高い周波数範囲62の周波数バンクにおいて得られたスペクトラム強度の合計値をレンジビンの関数として示す図の例である。計算部102aは、算出した合計値を検出部103aに出力する。
【0102】
図20は、検出部103aの動作の例を説明する図である。図20(a)に示すように、検出部103aは、各レンジビンで得られた高い周波数範囲62の強度の合計値を、第2の閾値(高域閾値)と比較する。高域閾値は、微動物体が誤検出かを判定するために用いられる。高い周波数範囲62の強度の合計値が高域閾値より大きいと、微動物体判定部104aにおいて誤検出であると判定される。判定については、後述する。さらに、検出部103aは、高域閾値を超えているレンジビンの番号を、高い周波数範囲62の強度の合計値が高域閾値を越えている旨とともに記憶する。図20(a)の例では、レンジビンR6で、高い周波数範囲62の強度の合計値が第2の閾値を越えていることが記憶される。
【0103】
一方、各レンジビンで得られた低い周波数範囲61の強度の合計値について、検出部103aは、図20(b)に示すように、第3の閾値(低域閾値)と比較する。低域閾値は、微動物体の検出に用いられる。低い周波数範囲61の強度の合計値が低域閾値より大きいと、微動物体が検出されている可能性があると判定される。判定については、後述する。検出部103aは、低域閾値を超えているレンジビンの番号を、低い周波数範囲61の強度の合計値が低域閾値を越えている旨とともに記憶する。図20(b)の場合、検出部103aは、レンジビンR4〜R6で、低い周波数範囲61の強度の合計値が第2の閾値を越えていることを記憶する。
【0104】
次に、検出部103aは、高域閾値を越えたレンジビンの番号から、通知されたレンジビンの間の距離を求める。さらに、捕捉される微動物体の大きさと通知されたレンジビンの間の距離を比較し、検出された目標が1つであるか、複数であるかを判定する。この判定方法は、検出部54で行われる判定の方法と同様である。さらに、検出部103aは、複数のレンジビンで低域閾値を越えたことが通知された場合も、同様の処理を行う。
【0105】
図21A〜図21Cは、微動物体検出部101の動作の例を説明するフローチャートである。図21A〜図21Cは例であり、微動物体検出部101の動作は、例えば、ステップS74〜S78の順番を任意に入れ替えるなどの変更が加えられる場合がある。また、ステップS68とS69がステップS70とS71より後に行われるように、微動物体検出部101の動作が変更される場合もある。ステップS61〜S65は、図12のステップS31〜S35と同様である。なお、図21A〜図21Cのフローチャートにおいて、変数tlは、低い周波数範囲61のデータから検出された目標(低域微動目標)の数の計数に用いられる。一方、変数thは、高い周波数範囲62のデータから検出された目標(高域微動目標)の数の計数に用いられる。なお、高域微動目標の数は、静止物体を微動物体と誤っている検出結果の数である。
【0106】
計算部102は、レンジビンごとの経時変化を求め、さらに、経時的な強度の変動の周波数スペクトルを求める(ステップS66、S67)。計算部102は、周波数スペクトルのうちの低い周波数範囲61での周波数バンクごとの強度の合計値を求めて記憶する(ステップS68、S69)。計算部102は、周波数スペクトルのうちの高い周波数範囲62での周波数バンクごとの強度の合計値を求めて記憶する(ステップS70、S71)。計算部102は、rを1つインクリメントして、レンジビンの番号の最大値と比較する(ステップS72、S73)。全てのレンジビンについて合計値が求められるまで、ステップS66〜S73の処理が繰り返される。
【0107】
合計値の算出が終わると、検出部103は、計算部102で計算された低い周波数範囲61の強度の合計値と、高い周波数範囲62の強度の合計値を、各々の合計値が得られたレンジビンの番号と対応付けて取得する(ステップS74、S75)。検出部103は、変数rを1に設定し、さらに、変数tl、thの値を1に設定する(ステップS76〜S78)。検出部103は、レンジビンごとに、低い周波数範囲61の強度の合計値を第3の閾値(低域閾値)と比較する(ステップS79)。合計値が低域閾値以下の場合、検出部103は、微動物体を検出していないと判定し、次のレンジビンを処理対象とする(ステップS79でNo)。
【0108】
合計値が低域閾値より大きい場合、検出部103は、変数tlの値が2未満であるかを確認する(ステップS80)。変数tlが2以上の場合、複数のレンジビンに亘って、1つの微動物体が検出されている可能性があるので、検出部103は、捕捉する微動物体の大きさと、合計値が低域閾値を超えたレンジビンの間の距離を比較する(ステップS81)。合計値が低域閾値より大きいレンジビン同士の距離が微動物体の大きさ以上の場合、検出部103は、tl番目の微動物体が検出された可能性があると判定してtlの値を1つインクリメントする(ステップS82、S83)。一方、合計値が低域閾値より大きいレンジビン同士の距離が微動物体の大きさより小さい場合、検出部103は、新たに微動物体を検出した可能性はないと判定する(ステップS81でNo)。
【0109】
検出部103は、レンジビンごとに、高い周波数範囲62の強度の合計値を第2の閾値(高域閾値)と比較する(ステップS84)。合計値が高域閾値より大きい場合、検出部103は、変数thの値が2未満であるかを確認する(ステップS85)。変数thが2以上の場合、検出部103は、捕捉する微動物体の大きさと、合計値が高域閾値を超えたレンジビンの間の距離を比較する(ステップS86)。合計値が高域閾値より大きいレンジビン同士の距離が微動物体の大きさ以上の場合、検出部103は、新たな誤検出を発見した可能性があると判定して、thの値を1つインクリメントする(ステップS87、S88)。一方、合計値が高域閾値より大きいレンジビン同士の距離が微動物体の大きさより小さい場合、検出部103は、新たな誤検出を発見した可能性はないと判定する(ステップS86でNo)。その後、検出部103は、rの値をインクリメントして次のレンジビンを処理対象とする(ステップS89)。さらに、検出部103は、変数rの値をレンジビンの番号の最大値と比較する(ステップS90)。検出部103は、全てのレンジビンについてステップS79〜S90の動作を行う。
【0110】
信号取得部51は、tの値をメモリ31に記憶されているベースバンドデジタル信号の総数(t_max)と比較する(ステップS91)。変数tの値がt_max以下の場合、信号取得部51は、現在の処理で得られた結果を、微動物体判定部104に出力する(ステップS92、S93)。また、信号取得部51は、変数tを1つインクリメントし、変数nを0にする(ステップS94)。変数tの値がt_maxとなるまで、ステップS62〜S94の処理が繰り返される。
【0111】
図22は、微動物体判定部104が取得したデータの例を示すテーブルである。微動物体判定部104は、検出部103から、高い周波数範囲62の強度の合計値が高域閾値を超えたレンジビン番号に対応する距離と、低い周波数範囲61の強度の合計値が低域閾値を超えたレンジビン番号に対応する距離を取得する。なお、微動物体判定部104は、検出部103からレンジビン番号を取得して、距離に変換することもできる。また、微動物体判定部104は、高い周波数範囲62と低い周波数範囲61のいずれの強度の合計値が閾値を超えているかも、距離と対応付けて記憶する。例えば、No.1のデータは、低い周波数範囲61の強度の合計値が低域閾値を越えている位置を介した、送信アンテナ13から受信アンテナ14までの距離が3.0mであることを示している。同様に、No.2のデータは、高い周波数範囲62の強度の合計値が高域閾値を越えている位置を介した、送信アンテナ13から受信アンテナ14までの距離が3.1mであることを示している。
【0112】
図23は、微動物体判定部104で行われる判定の例を説明するフローチャートである。微動物体判定部104は、記憶しているデータが、低い周波数範囲61の強度の処理によって得られたかを判定する(ステップS101)。データが低い周波数範囲61の強度の処理によって得られたものではない場合、微動物体判定部104は、微動物体を検知していないと判定する(ステップS101でNo、ステップS102)。例えば、微動物体判定部104は、図23のNo.2のデータに対応する微動物体は無いと判定する。
【0113】
一方、低い周波数範囲61の強度の処理によって得られたデータについて、微動物体を検知した可能性があると判定する(ステップS101でYes)。そこで、微動物体判定部104は、低い周波数範囲61の強度の処理によって得られたデータが検出された距離から微動物体の大きさの範囲内で、高い周波数範囲62の強度の合計値が高域閾値を超えているかを確認する(ステップS103)。高い周波数範囲62の強度の合計値が高域閾値を超えている場合、低い周波数範囲61の強度の合計値が低域閾値を越えた位置には微動物体がないと判定する(ステップS103でYes、ステップS104)。一方、高い周波数範囲62の強度の合計値が高域閾値を超えていない場合、低い周波数範囲61の強度の合計値が低域閾値を越えた位置に微動物体が存在すると判定する(ステップS103でNo、ステップS105)。
【0114】
例えば、No.4のデータに基づいて、微動物体判定部104は、送信アンテナ13から微動物体を介した受信アンテナ14までの距離が4.0mとなる位置に微動物体が存在する可能性があると判定する。さらに、微動物体判定部104は、送信アンテナ13および受信アンテナ14からの距離が4.0mとなる位置で、高い周波数範囲62の強度を確認する。No.5のデータに示すように、図23では、4.0mの距離で高い周波数範囲62の強度の合計値が高域閾値を超えている。そこで、微動物体判定部104は、距離が4.0mのデータは、微動物体ではなく、移動物体の動作によって移動物体の背景にある静止物体からの反射波が変化した信号を検出していると判定する。また、No.1とNo.2のデータの組み合わせについても、微動物体の大きさが0.1m以上であれば、微動物体の大きさの範囲内で、低い周波数範囲61の強度の合計値と、高い周波数範囲62の強度の合計値の両方が閾値を超えている。この場合、微動物体判定部104は、No.1とNo.2のデータも、移動物体の動作によって移動物体の背景にある静止物体からの反射波が変化した信号に基づいていると判定する。
【0115】
一方、No.3のデータで得られた距離から微動物体の大きさの範囲内で、高い周波数範囲62の強度の合計値が高域閾値を超えていなかったとする。すると、微動物体判定部104は、No.3のデータは、微動物体を検出した結果であると判定する。
【0116】
微動物体判定部104は、微動物体に基づいたデータであると判定したデータを微動物体角度計算部33に出力する。一方、移動物体の背景にある静止物体からの反射波に基づいて検出された結果については、微動物体判定部104は、微動物体角度計算部33に出力しない。なお、ここまで説明した動作は、微動物体検出部101a、101b、および、微動物体判定部104a、104bで行われる。すなわち、微動物体判定部104aは、受信アンテナ14aで受信された反射波から得られたデータを処理して判定結果を微動物体角度計算部33に出力する。また、微動物体判定部104bは、受信アンテナ14bで受信された反射波から得られたデータを処理して判定結果を微動物体角度計算部33に出力する。
【0117】
微動物体角度計算部33は、微動物体判定部104から入力されたデータに基づいて微動物体位置を特定する。従って、微動物体角度計算部33は、静止物体からの反射波ではないことが確認されたデータについて位置を特定するが、移動物体の背後に位置する静止物体は検出しない。微動物体の位置の特定方法は、第1の実施形態で述べたとおりである。また、微動物体角度計算部33は特定された位置を表示部15に出力する。表示部15は、微動物体角度計算部33から入力された結果を、移動物体角度計算部32から入力された結果と共に、ディスプレイに表示する。
【0118】
このように、微動物体判定部104は、微動物体として検出された反射波の強度の変動が、微動物体に基づいたものか、静止物体に基づいて得られたものかを判定する。そして、微動物体判定部104は、微動物体に基づいて検出された反射波の強度の変化だけを移動物体角度計算部32に通知するため、物体検出装置90では、移動物体の背後の静止物体の位置は特定しない。このため、物体検出装置90は、図16に示したように、静止物体を微動物体と誤って検出することを防ぐことができる。物体検出装置90は、微動物体と静止物体を区別することができるので、例えば、室内などの狭い場所での移動物体と微動物体の検知に用いることができる。
【0119】
<第3の実施形態>
誤検出かの判定は、第2の実施形態に示したようにアンテナごとにデータを処理している段階で行われる場合があるが、検出された目標の位置を特定した後に行われる場合もある。第3の実施形態では、目標の位置が特定された後に、誤検出の判定が行われる場合の物体検出装置について説明する。
【0120】
図24は、第3の実施形態に係る物体検出装置110の構成の例を示す図である。物体検出装置110は、制御部11、送信部12、送信アンテナ13、受信アンテナ14、表示部15、受信部20、および、データ処理部120を備える。データ処理部120は、低域角度計算部121、高域角度計算部122、微動物体判定部123を備える他、メモリ31、移動物体検出部40、微動物体検出部101、移動物体角度計算部32を備える。メモリ31、微動物体検出部101、移動物体角度計算部32の動作は、第2の実施形態と同様である。また、制御部11、送信部12、送信アンテナ13、受信アンテナ14、表示部15、受信部20、移動物体検出部40の動作も、第1もしくは第2の実施形態と同様である。
【0121】
検出部103aは、検出したデータのうち、周波数スペクトルの低い周波数範囲62から得られた合計値に基づいて算出された距離を、低域角度計算部121に通知する。また、検出部103aは、高い周波数範囲62から得られた合計値に基づいて算出された距離を、高域角度計算部122に通知する。検出部103bも検出部103aと同様に動作する。また、検出部103aは、低域角度計算部121もしくは高域角度計算部122に出力したデータを廃棄する。
【0122】
低域角度計算部121は、周波数スペクトルの低い周波数範囲61から得られたデータを用いて、合計値が低域閾値を超えた位置を特定する。すなわち、低域角度計算部121は、微動物体が存在する可能性のある全ての位置について、送信アンテナ13からの距離と角度θの値を求める。位置の特定方法は、第1の実施形態で述べた移動物体角度計算部32や微動物体角度計算部33の用いる特定方法と同様である。低域角度計算部121は、特定した距離と角度を微動物体判定部123に通知する。
【0123】
高域角度計算部122は、周波数スペクトルの高い周波数範囲62から得られたデータを用いて、合計値が高域閾値を超えた位置を特定する。つまり、高域角度計算部122は、移動物体の背後にある静止物体について、送信アンテナ13からの距離と角度θを求める。高域角度計算部122により特定される位置は、低域角度計算部121により微動物体と誤検出された目標の位置である。高域角度計算部122は、特定した位置と距離を微動物体判定部123に通知する。なお、高域角度計算部122は、第1の実施形態で述べた移動物体角度計算部32などの用いる特定方法を用いて、誤検出された目標の位置を求める。
【0124】
微動物体判定部123は、低域角度計算部121と高域角度計算部122から得られた位置を比較する。図25は、微動物体判定部123が取得したデータの例を示すテーブルである。微動物体判定部123は、通知された各々の位置を表す距離と角度について、低域角度計算部121の高域角度計算部122のいずれから通知されたかを対応付けて記憶する。
【0125】
微動物体判定部123は、低域角度計算部121から通知された位置のそれぞれについて、その位置から微動物体の大きさの範囲に、高域角度計算部122から通知された位置があるかを確認する。低域角度計算部121から通知された位置から微動物体の大きさの範囲に、高域角度計算部122から通知された位置がある場合、微動物体判定部123は、低域角度計算部121からの通知は誤目標の位置であると判定する。例えば、低域角度計算部121から通知された位置と高域角度計算部122から通知された位置が一致する場合、微動物体判定部123は、低域角度計算部121から通知された位置には微動物体が存在しないと判定する。また、例えば、微動物体の大きさが0.5mであると、図25の例では、No.1のデータが示す位置とNo.2のデータが示す位置は、微動物体の大きさの範囲内である。さらに、No.1のデータは低域角度計算部121から通知され、No.2のデータは、高域角度計算部122から通知されている。従って、微動物体判定部123は、No.1のデータは、移動物体の影響により静止物体を微動物体と誤認していると判定する。
【0126】
一方、No.3、No.4のデータに示されている位置から微動物体の大きさの範囲内には、高域角度計算部122から得られた位置がないとする。この場合、No.3、No.4のデータが表す位置に微動物体が存在すると判定する。
【0127】
従って、第3の実施形態に係る物体検出装置110でも、移動物体と微動物体を同時に検出することができ、さらに、静止物体を微動物体と誤って検出することを防ぐことができる。
【0128】
<第4の実施形態>
第4の実施形態では複数の送信部と1つの受信部を備える物体検出装置について説明する。
【0129】
図26は、第4の実施形態に係る物体検出装置130の構成の例を示す図である。物体検出装置130は、複数の送信部132(132a、132b)、送信アンテナ13(13a、13b)を備え、受信アンテナ14と受信部140を1つずつ備える。物体検出装置130は、さらに、制御部131、データ集録部145、データ処理部100、表示部15を備える。データ処理部100、表示部15の動作は、第2の実施形態と同様である。
【0130】
制御部131は、第1および第2の送信クロック信号、受信クロック信号、受信トリガ信号を生成する。ここで、制御部131は、送信部132aからレーダパルスが送信される間は、送信部132bからレーダパルスが送信されないように、第1および第2の送信クロック信号を生成する。以下の説明では、送信部132aから1つのベースバンドデジタル信号の生成に用いられる数のレーダパルスが送信された後、送信部132bから同数のレーダパルスが送信されるなど、2つの送信部12から交互にレーダパルスの送信が行われるものとする。制御部131は、第1の送信クロック信号を送信部132a、第2の送信クロック信号を送信部132bに出力する。さらに、制御部131は、受信クロック信号を受信部140に出力し、受信トリガ信号をデータ集録部145に出力する。
【0131】
第1の送信クロック信号は、送信部132aから送信アンテナ13aを介してレーダパルスを出力するときのタイミングの制御に用いられる。送信部132aは、第1の送信クロック信号で指定されたタイミングに合わせて、送信アンテナ13aを介してレーダパルスを目標に送信する。一方、送信部132bは、第2の送信クロック信号にあわせて、送信アンテナ13bを介してレーダパルスを目標に送信する。
【0132】
受信部140は、ゲートパルス生成部21と検波部22を備える。受信部140は、受信クロック信号を用いて等価サンプリングを行い、ベースバンドデジタル信号を生成する。受信部140は、送信アンテナ13aを介して送信されたレーダパルスの反射波と、送信アンテナ13bを介して送信されたレーダパルスの反射波を交互に受信する。なお、受信アンテナ14、ゲートパルス生成部21、検波部22の動作は、第1の実施形態と同様である。
【0133】
データ集録部145は、受信トリガ信号に応じてベースバンドデジタル信号を生成する。受信トリガ信号は、ベースバンドデジタル信号を生成するタイミングと、送信部132a、132bのいずれから送信されたレーダパルスの反射波を受信しているかを特定する情報が含まれる。データ集録部145は、受信トリガ信号に含まれている情報を用いて、ベースバンドデジタル信号をメモリ31aとメモリ31bのいずれに出力するかを決定する。すなわち、データ収録部145は、送信部132aから送信されたレーダパルスの反射波を用いて生成されたベースバンドデジタル信号を、メモリ31aに出力する。一方、データ収録部145は、送信部132bから送信されたレーダパルスの反射波を用いて生成されたベースバンドデジタル信号を、メモリ31bに出力する。
【0134】
本実施形態では、2つの送信部132が含まれている物体検出装置130について説明したが、物体検出装置130に含まれる送信部132の数は任意の正の整数とすることができる。また、上記の説明では、データ処理部100を含む物体検出装置130について説明したが、第1の実施形態や第3の実施形態に係る物体検出装置でも、物体検出装置130と同様に送信部132の数を変更することができる。従って、物体検出装置に含まれる受信部140や送信部132の数は任意に変更することができるといえる。
【0135】
等価時間サンプリング方式を用いるレーダ装置では、受信部140よりも送信部132のほうが回路を小型にすることができることが多い。そこで、物体検出装置が備える受信部140の数を減らすことにより物体検出装置を小型化し、軽量化することができる。さらに、送信部132を複数備えることにより、受信部140が1つであっても、移動物体や微動物体の位置を特定することができる。
【0136】
<その他>
物体検出装置10、90、110、130のいずれも、Radio Frequency(RF)回路、メモリ、Central Processing Unit(CPU)、および、表示装置を備えている。例えば、RF回路は、制御部11、送信部12、送信アンテナ13、受信アンテナ14、受信部20として動作することができる。メモリは、メモリ31として動作する。CPUは、データ処理部30、100、120として動作することができる。なお、物体検出装置10、90、110、130は、CPUの代わりにDigital Signal Processor(DSP)などを備えることもでき、この場合は、DSPがデータ処理部30、100、120として動作する。表示装置は、表示部15として動作する。
【0137】
図15、図16を参照しながら、物体検出装置10が壁透過レーダを備えている場合について述べたが、物体検出装置90、110のいずれも、壁透過レーダを備えることができる。さらに、物体検出装置10、90、110に搭載されるレーダの種類や用途は、壁透過レーダに限られない。物体検出装置10、90、110、130は、例えば、森林透過レーダ、生存者探知レーダなどや、その他の様々な用途に用いられるレーダを搭載することができる。
【0138】
第2の時間が経過する間に移動する移動物体の検出位置の変動が問題とならない用途に用いられる物体検出装置10、90、110、130では、第1の時間の終了時刻を第2の時間の終了時刻と同じ時刻としなくても良い。この場合、例えば、微動物体検出部50での時刻T1〜T128のベースバンドデジタル信号の処理結果と、移動物体検出部40での時刻T1〜T8のベースバンドデジタル信号の処理結果を同時に表示部15に表示することができる。
【0139】
また、以上の説明では、ベースバンド周期が50msの場合を例として説明したが、第1〜第4の実施形態のいずれでも、ベースバンド周期は、送信クロック信号と受信クロック信号の値に応じて、任意に変更される場合がある。
【0140】
上述の第1〜第4の実施形態を含む実施形態に関し、さらに以下の付記を開示する。
(付記1)
レーダパルスを送信する送信部と、
物体からの前記レーダパルスの反射波を受信する受信部と、
前記受信部が第1の時間の間に受信した受信信号を解析することにより、移動している移動物体を検出する移動物体検出部と、
前記第1の時間よりも長い第2の時間の間に、前記受信部が受信した受信信号を解析することにより前記移動物体に比べて移動量が微小な微動物体を検出する微動物体検出部と
を備えることを特徴とする物体検出装置。
(付記2)
前記微動物体検出部は、
前記第2の時間の間に前記受信部が受信した受信信号の強度の経時変化を、検出対象の微動物体を介した前記送信部から前記受信部までの距離に応じて求める経時変化取得部と、
前記経時変化の波形を周波数スペクトルに変換すると共に、第1の閾値よりも高い周波数において前記周波数スペクトルの強度の合計値を計算する計算部を備え、
前記合計値が第2の閾値を超えると、前記経時変化が観測された距離には微動物体が存在しないと判定する微動物体判定部
をさらに備えることを特徴とする付記1に記載の物体検出装置。
(付記3)
前記計算部は、前記第1の閾値以下の周波数において前記周波数スペクトルの強度の合計値を計算し、
前記微動物体判定部は、前記第1の閾値以下の周波数において前記周波数スペクトルの強度の合計値が第3の閾値を超えると、前記経時変化に対応する距離を満たす位置に微動物体が存在すると判定する
ことを特徴とする付記2に記載の物体検出装置。
(付記4)
前記微動物体判定部は、前記周波数スペクトルでの前記第1の閾値よりも高い周波数の強度の合計値が前記第2の閾値を超え、さらに、前記第1の閾値以下の周波数において前記周波数スペクトルの強度の合計値が前記第3の閾値を超えると、前記経時変化に対応する距離を満たす位置で検出された物体は静止していると判定する
ことを特徴とする付記3に記載の物体検出装置。
(付記5)
前記移動物体検出部は、
前記受信部が受信した受信信号の強度の前記第1の時間中の経時変化を、検出対象の移動物体を介した前記送信部から前記受信部までの距離に応じて求めると共に、前記第1の時間中の経時変化の波形に含まれる周波数の強度を示す周波数スペクトルを求め、
前記第1の時間中の経時変化から得られた周波数スペクトルで、正の周波数の強度の合計値が第4の閾値以上であると、前記第1の時間中の経時変化に対応する距離を満たす位置で移動物体を検出したと判定する
ことを特徴とする付記1〜4のいずれか1項に記載の物体検出装置。
(付記6)
前記移動物体検出部は、第1の開始時刻から前記第1の時間が経過するまでに受信された受信信号から得られた第1の検出結果と、前記第1の開始時刻より後の第2の開始時刻から前記第1の時間が経過するまでに受信された受信信号から得られた第2の検出結果とを用いて、前記第1の開始時刻から前記第2の開始時刻までの前記移動物体の移動の軌跡を求め、
前記微動物体判定部は、第3の開始時刻から前記第2の時間が経過するまでに受信された受信信号から得られた第1の判定結果と、前記第3の開始時刻より後の第4の開始時刻から前記第2の時間が経過するまでに受信された受信信号から得られた第2の判定結果とを用いて、前記第3の開始時刻から前記第4の開始時刻までの前記微動物体の移動の軌跡を求める
ことを特徴とする付記2〜5のいずれか1項に記載の物体検出装置。
(付記7)
レーダパルスを送信し、
物体からの前記レーダパルスの反射波を受信し、
第1の時間の間に受信した受信信号を解析することにより、移動している移動物体を検出し、
前記第1の時間よりも長い第2の時間の間に受信した受信信号を解析することにより、前記移動物体に比べて移動量が微小な微動物体を検出する
ことを特徴とする検出方法。
【符号の説明】
【0141】
10、90、110、130 物体検出装置
11 制御部
12、132 送信部
13 送信アンテナ
14 受信アンテナ
15 表示部
20、140 受信部
21 ゲートパルス生成部
22 検波部
23、145 データ集録部
30、100、120 データ処理部
31 メモリ
32 移動物体角度計算部
33 微動物体角度計算部
40 移動物体検出部
41、51 信号取得部
42、52 経時変化取得部
43、53、102 計算部
44、54、103 検出部
50、101 微動物体検出部
70 移動物体
75 微動物体
80 静止物体
104、123 微動物体判定部
121 低域角度計算部
122 高域角度計算部
【特許請求の範囲】
【請求項1】
レーダパルスを送信する送信部と、
物体からの前記レーダパルスの反射波を受信する受信部と、
前記受信部が第1の時間の間に受信した受信信号を解析することにより、移動している移動物体を検出する移動物体検出部と、
前記第1の時間よりも長い第2の時間の間に、前記受信部が受信した受信信号を解析することにより前記移動物体に比べて移動量が微小な微動物体を検出する微動物体検出部と
を備えることを特徴とする物体検出装置。
【請求項2】
前記微動物体検出部は、
前記第2の時間の間に前記受信部が受信した受信信号の強度の経時変化を、検出対象の微動物体を介した前記送信部から前記受信部までの距離に応じて求める経時変化取得部と、
前記経時変化の波形を周波数スペクトルに変換すると共に、第1の閾値よりも高い周波数において前記周波数スペクトルの強度の合計値を計算する計算部を備え、
前記合計値が第2の閾値を超えると、前記経時変化が観測された距離には微動物体が存在しないと判定する微動物体判定部
をさらに備えることを特徴とする請求項1に記載の物体検出装置。
【請求項3】
前記計算部は、前記第1の閾値以下の周波数において前記周波数スペクトルの強度の合計値を計算し、
前記微動物体判定部は、前記第1の閾値以下の周波数において前記周波数スペクトルの強度の合計値が第3の閾値を超えると、前記経時変化に対応する距離を満たす位置に微動物体が存在すると判定する
ことを特徴とする請求項2に記載の物体検出装置。
【請求項4】
前記微動物体判定部は、前記周波数スペクトルでの前記第1の閾値よりも高い周波数の強度の合計値が前記第2の閾値を超え、さらに、前記第1の閾値以下の周波数において前記周波数スペクトルの強度の合計値が前記第3の閾値を超えると、前記経時変化に対応する距離を満たす位置で検出された物体は静止していると判定する
ことを特徴とする請求項3に記載の物体検出装置。
【請求項5】
前記移動物体検出部は、
前記受信部が受信した受信信号の強度の前記第1の時間中の経時変化を、検出対象の移動物体を介した前記送信部から前記受信部までの距離に応じて求めると共に、前記第1の時間中の経時変化の波形に含まれる周波数の強度を示す周波数スペクトルを求め、
前記第1の時間中の経時変化から得られた周波数スペクトルで、正の周波数の強度の合計値が第4の閾値以上であると、前記第1の時間中の経時変化に対応する距離を満たす位置で移動物体を検出したと判定する
ことを特徴とする請求項1〜4のいずれか1項に記載の物体検出装置。
【請求項6】
レーダパルスを送信し、
物体からの前記レーダパルスの反射波を受信し、
第1の時間の間に受信した受信信号を解析することにより、移動している移動物体を検出し、
前記第1の時間よりも長い第2の時間の間に受信した受信信号を解析することにより、前記移動物体に比べて移動量が微小な微動物体を検出する
ことを特徴とする物体の検出方法。
【請求項1】
レーダパルスを送信する送信部と、
物体からの前記レーダパルスの反射波を受信する受信部と、
前記受信部が第1の時間の間に受信した受信信号を解析することにより、移動している移動物体を検出する移動物体検出部と、
前記第1の時間よりも長い第2の時間の間に、前記受信部が受信した受信信号を解析することにより前記移動物体に比べて移動量が微小な微動物体を検出する微動物体検出部と
を備えることを特徴とする物体検出装置。
【請求項2】
前記微動物体検出部は、
前記第2の時間の間に前記受信部が受信した受信信号の強度の経時変化を、検出対象の微動物体を介した前記送信部から前記受信部までの距離に応じて求める経時変化取得部と、
前記経時変化の波形を周波数スペクトルに変換すると共に、第1の閾値よりも高い周波数において前記周波数スペクトルの強度の合計値を計算する計算部を備え、
前記合計値が第2の閾値を超えると、前記経時変化が観測された距離には微動物体が存在しないと判定する微動物体判定部
をさらに備えることを特徴とする請求項1に記載の物体検出装置。
【請求項3】
前記計算部は、前記第1の閾値以下の周波数において前記周波数スペクトルの強度の合計値を計算し、
前記微動物体判定部は、前記第1の閾値以下の周波数において前記周波数スペクトルの強度の合計値が第3の閾値を超えると、前記経時変化に対応する距離を満たす位置に微動物体が存在すると判定する
ことを特徴とする請求項2に記載の物体検出装置。
【請求項4】
前記微動物体判定部は、前記周波数スペクトルでの前記第1の閾値よりも高い周波数の強度の合計値が前記第2の閾値を超え、さらに、前記第1の閾値以下の周波数において前記周波数スペクトルの強度の合計値が前記第3の閾値を超えると、前記経時変化に対応する距離を満たす位置で検出された物体は静止していると判定する
ことを特徴とする請求項3に記載の物体検出装置。
【請求項5】
前記移動物体検出部は、
前記受信部が受信した受信信号の強度の前記第1の時間中の経時変化を、検出対象の移動物体を介した前記送信部から前記受信部までの距離に応じて求めると共に、前記第1の時間中の経時変化の波形に含まれる周波数の強度を示す周波数スペクトルを求め、
前記第1の時間中の経時変化から得られた周波数スペクトルで、正の周波数の強度の合計値が第4の閾値以上であると、前記第1の時間中の経時変化に対応する距離を満たす位置で移動物体を検出したと判定する
ことを特徴とする請求項1〜4のいずれか1項に記載の物体検出装置。
【請求項6】
レーダパルスを送信し、
物体からの前記レーダパルスの反射波を受信し、
第1の時間の間に受信した受信信号を解析することにより、移動している移動物体を検出し、
前記第1の時間よりも長い第2の時間の間に受信した受信信号を解析することにより、前記移動物体に比べて移動量が微小な微動物体を検出する
ことを特徴とする物体の検出方法。
【図1】

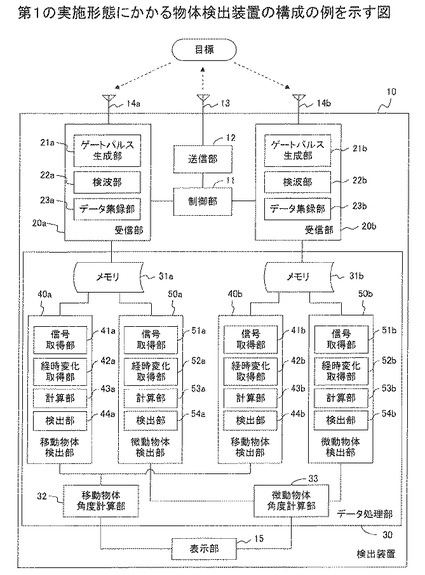
【図3】
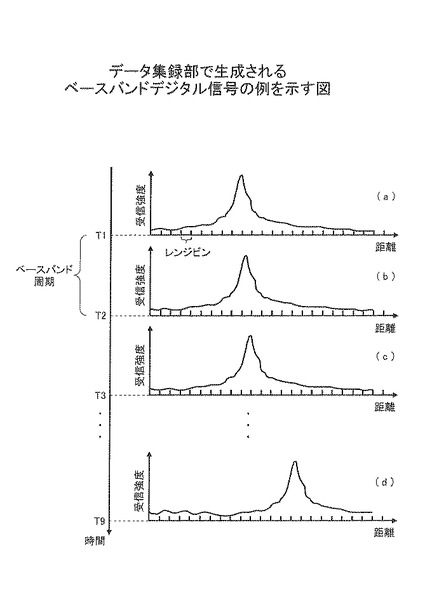
【図7】
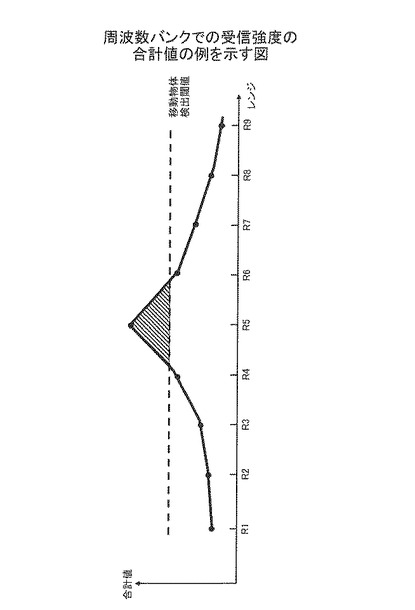
【図8A】
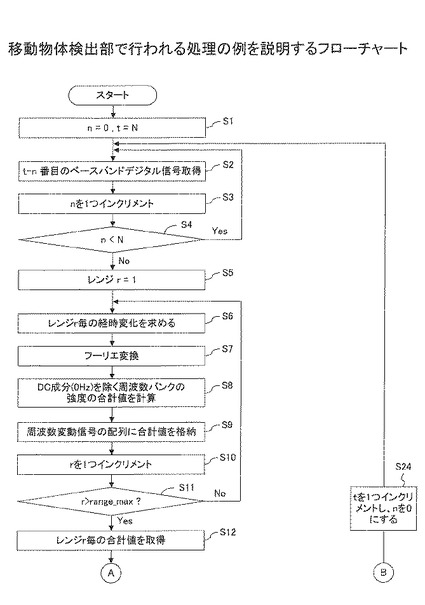
【図8B】
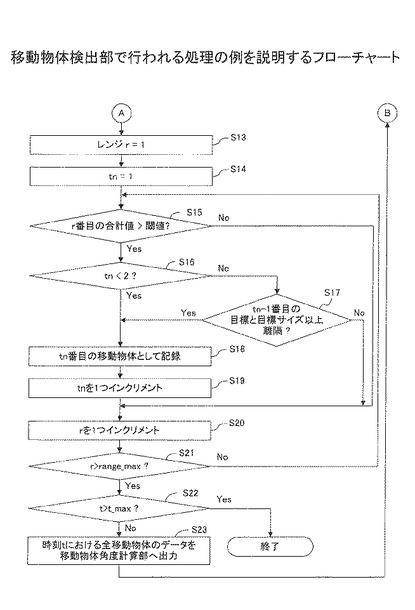
【図9】
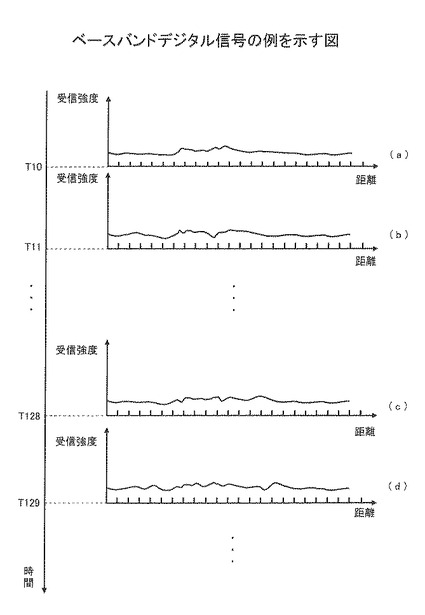
【図10】
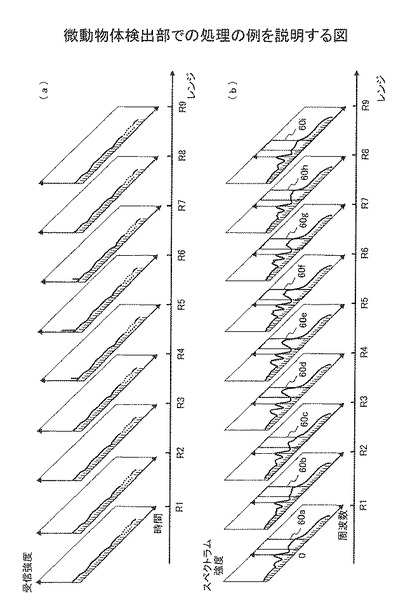
【図11】
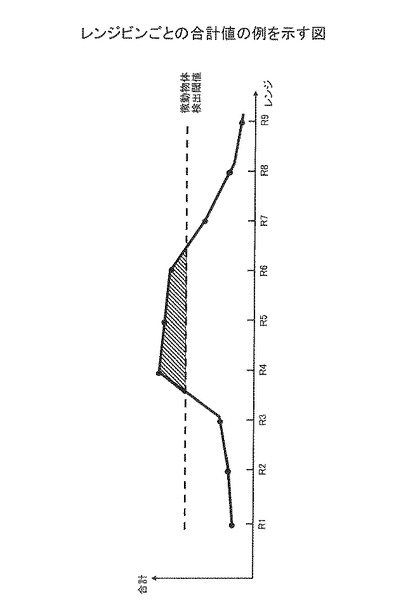
【図12A】
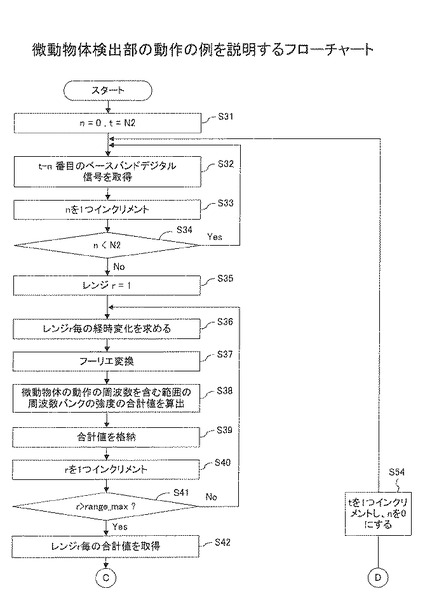
【図12B】
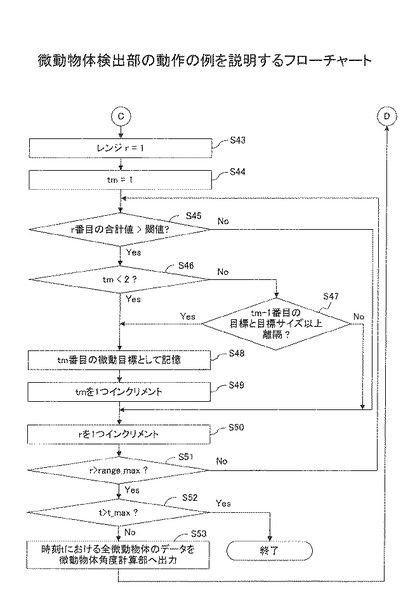
【図13】
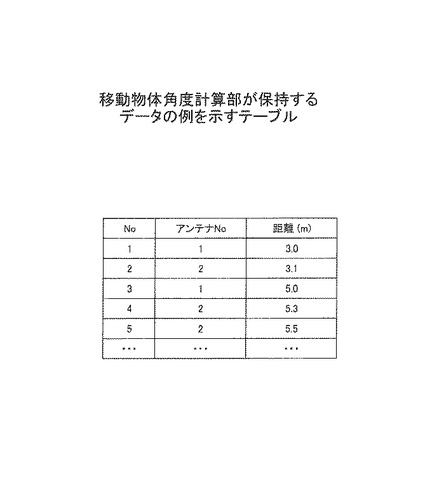
【図15】
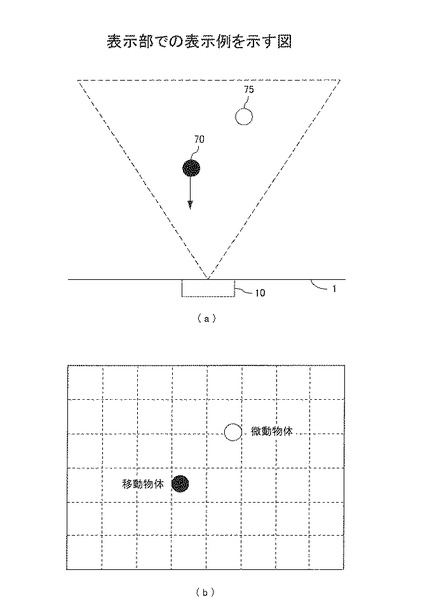
【図17】
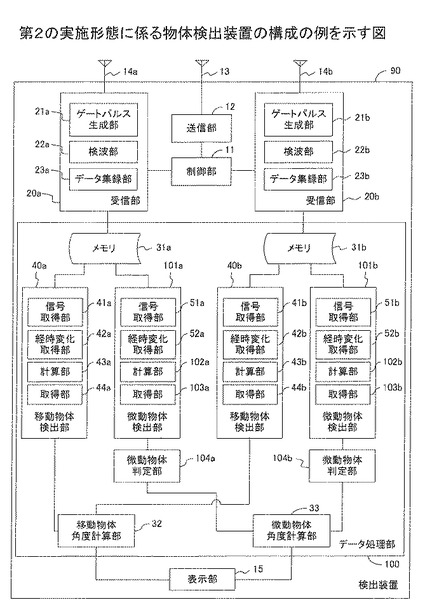
【図20】
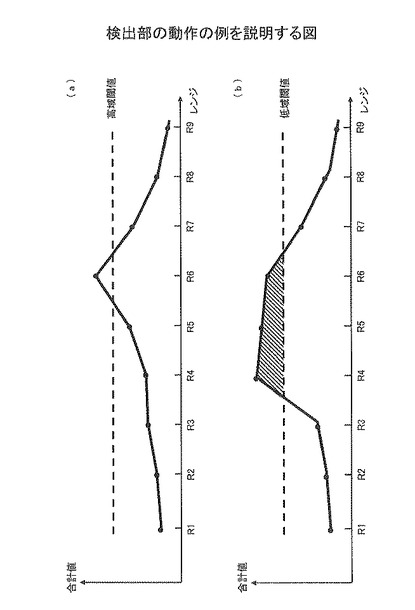
【図21A】
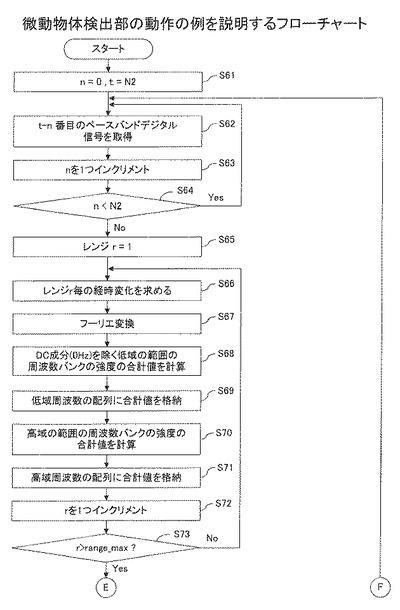
【図21B】
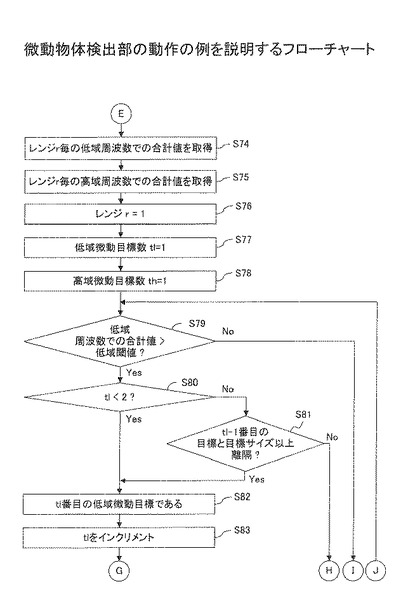
【図21C】
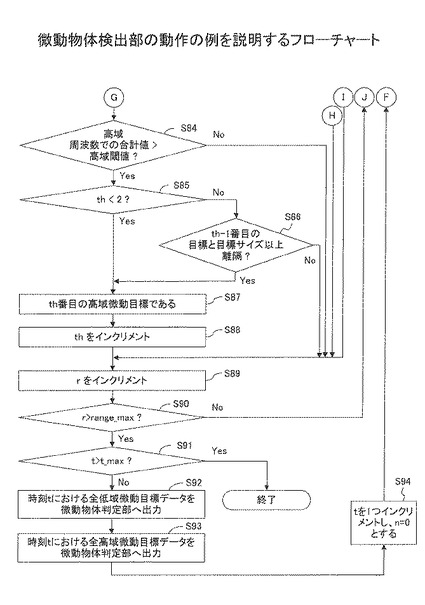
【図22】
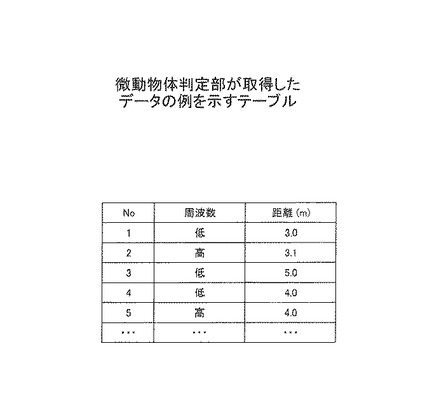
【図23】
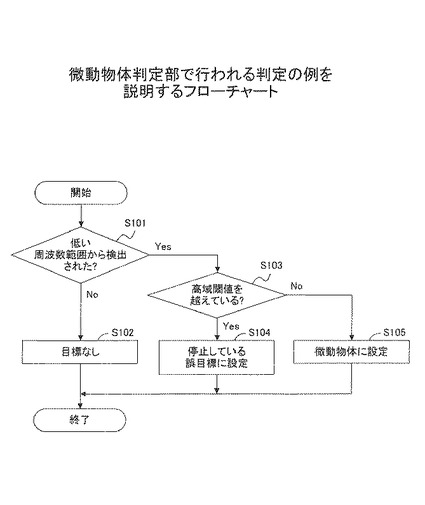
【図24】
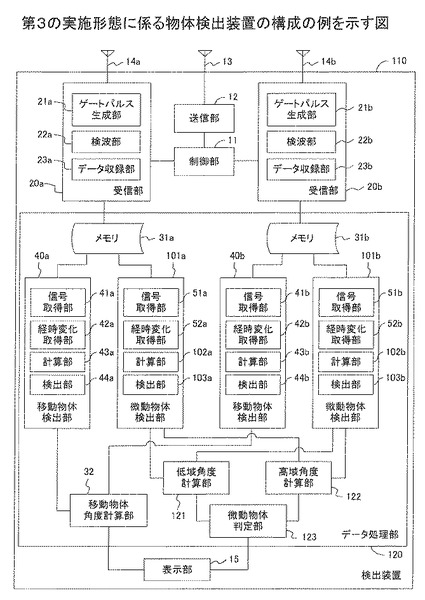
【図25】
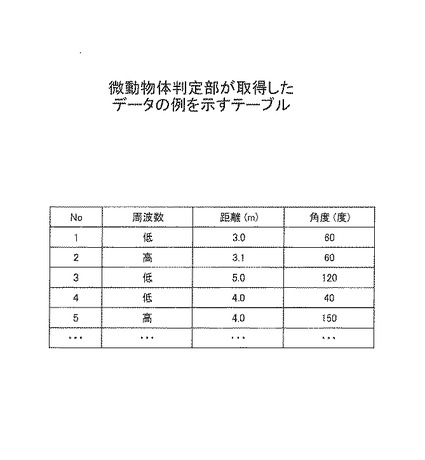
【図26】
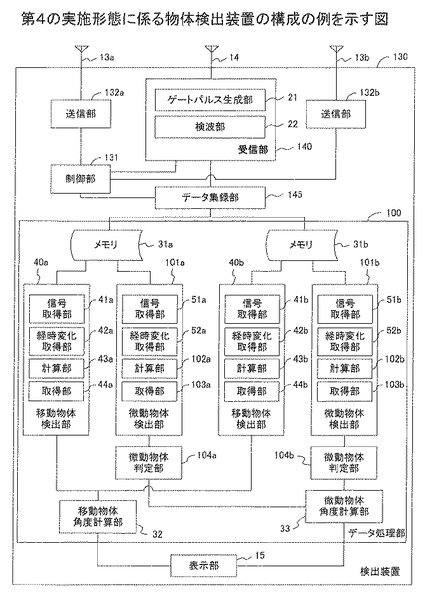
【図2】
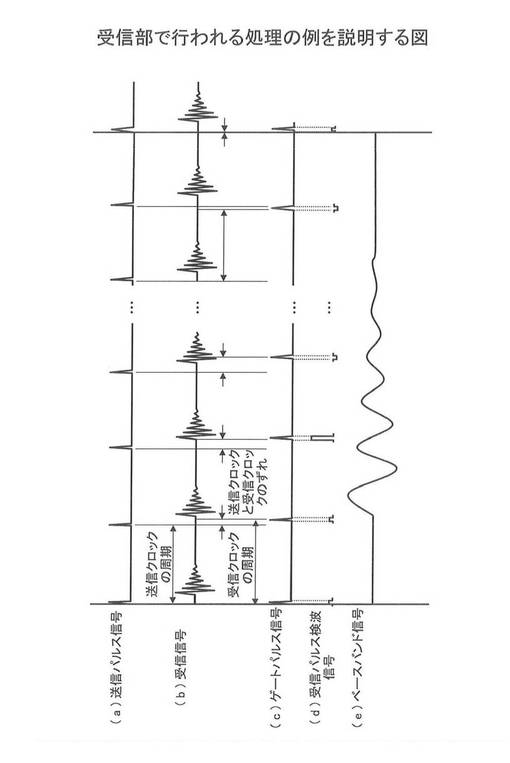
【図4】
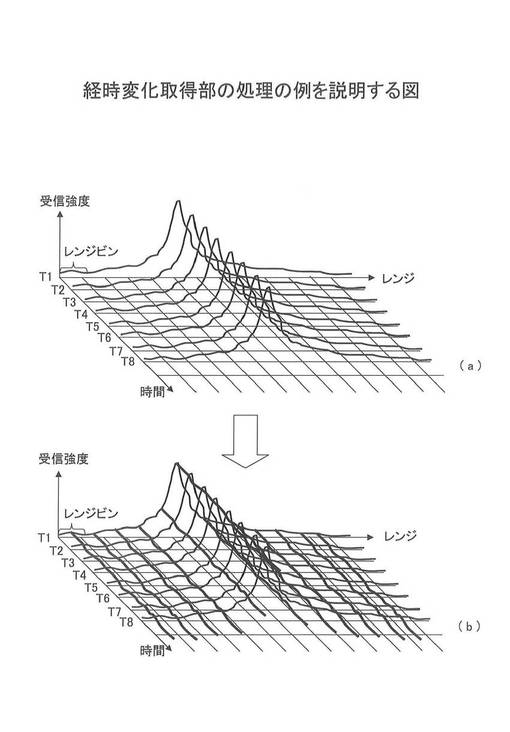
【図5】
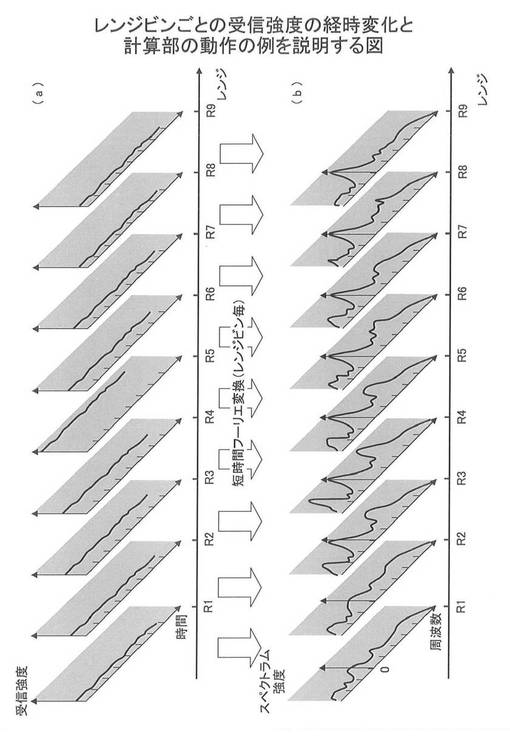
【図6】
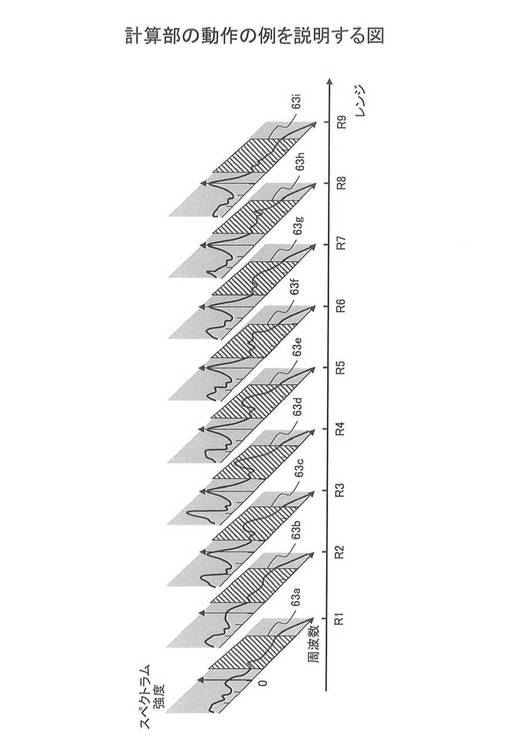
【図14】
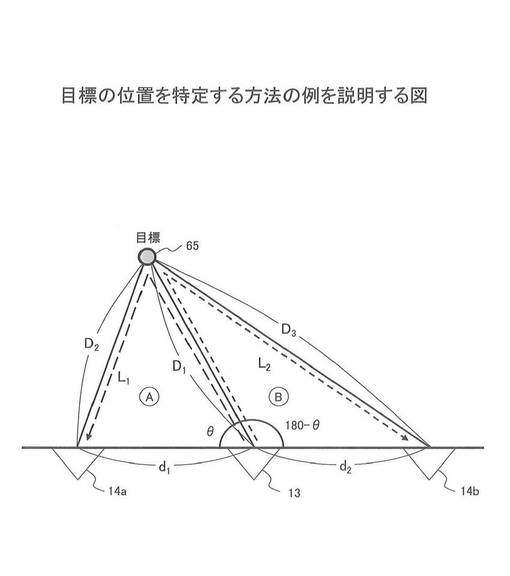
【図16】
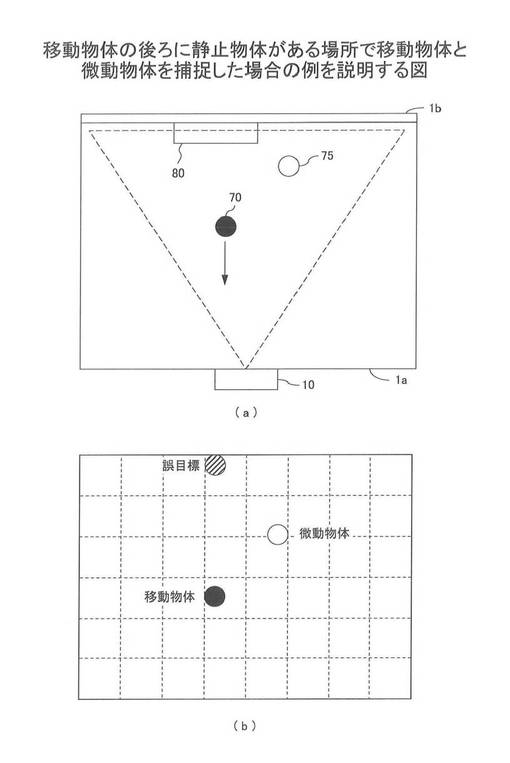
【図18】
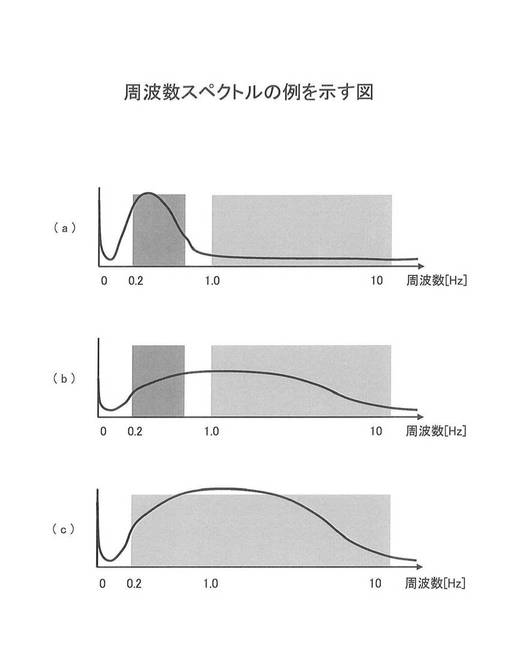
【図19】
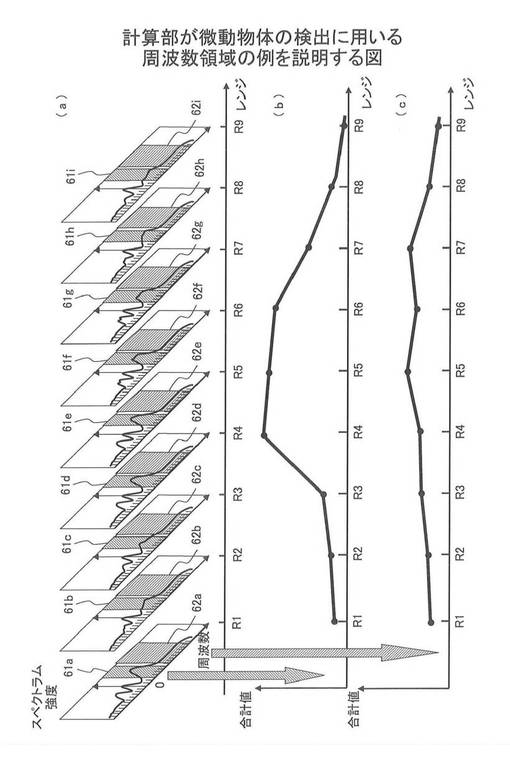
【図3】
【図7】
【図8A】
【図8B】
【図9】
【図10】
【図11】
【図12A】
【図12B】
【図13】
【図15】
【図17】
【図20】
【図21A】
【図21B】
【図21C】
【図22】
【図23】
【図24】
【図25】
【図26】
【図2】
【図4】
【図5】
【図6】
【図14】
【図16】
【図18】
【図19】
【公開番号】特開2012−137432(P2012−137432A)
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願番号】特願2010−291204(P2010−291204)
【出願日】平成22年12月27日(2010.12.27)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願日】平成22年12月27日(2010.12.27)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]