
物体検出装置および車両制御装置
【課題】自車に対する先々行車を正確に検出することができる物体検出装置の提供。
【解決手段】レーダ波の送出により、上記自車に対する上記物体の左右方向角度および上下方向角度、並びに上記自車から上記物体までの距離を含むレーダ情報を取得するレーダ情報取得手段と、上記レーダ情報に基づいて物体を認識する物体認識手段とを備え、上記レーダ情報取得手段によって左右方向が同一で上記自車からの距離が異なる複数の上記レーダ情報が取得され、かつ、当該複数のレーダ情報のうち上記自車から最も近い物体以外の他の物体の上記上下方向角度または当該角度に基づく上下方向位置が予め定められた条件を満たす場合、上記物体認識手段は、上記他の物体のうち上記条件を満たす物体が上記自車から最も近い物体の向こう側に上記自車の走行の障害となり得る物体として存在すると判断する。
【解決手段】レーダ波の送出により、上記自車に対する上記物体の左右方向角度および上下方向角度、並びに上記自車から上記物体までの距離を含むレーダ情報を取得するレーダ情報取得手段と、上記レーダ情報に基づいて物体を認識する物体認識手段とを備え、上記レーダ情報取得手段によって左右方向が同一で上記自車からの距離が異なる複数の上記レーダ情報が取得され、かつ、当該複数のレーダ情報のうち上記自車から最も近い物体以外の他の物体の上記上下方向角度または当該角度に基づく上下方向位置が予め定められた条件を満たす場合、上記物体認識手段は、上記他の物体のうち上記条件を満たす物体が上記自車から最も近い物体の向こう側に上記自車の走行の障害となり得る物体として存在すると判断する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体検出装置および車両制御装置に関し、より詳しくは、自車に対する先々行車を正確に検出することができる物体検出装置およびこの物体検出装置を備えた車両制御装置に関する。
【背景技術】
【0002】
近年、燃費向上や排気ガス抑制のためアイドリングストップシステム(Idoling Stop System)が開発されている。また、従来のアイドリングストップシステムには、自車前方の先行車、さらにはその前方の先々行車両の動きを検出して、エンジンの停止および始動のタイミングを判断するものが提案されている。
【0003】
例えば、特許文献1に記載のアイドル制御装置は、ミリ波レーダ装置が自車両前方の先々行車の動きを検出し、検出した先々行車の動きに応じて、自車のエンジンを始動してアイドルスタート状態に制御するものとして提案されている。特許文献1の記載によると、ミリ波レーダ装置から放射されたレーダ波は、先行車下方の路面で反射されて先々行車に伝播し、先々行車で反射されて再び先行車下方の路面で反射されてミリ波レーダ装置に受信される。ミリ波レーダ装置に受信されたレーダ波を演算処理することにより、先々行車と自車の相対速度および相対位置を測定することができる。
【0004】
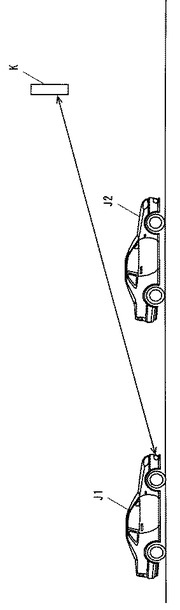
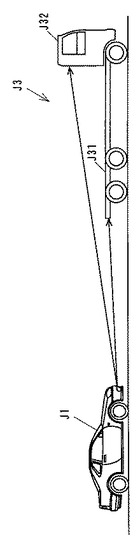
しかしながら、特許文献1に記載のアイドル制御装置には、以下の課題があった。すなわち、特許文献1におけるミリ波レーダ装置は、レーダ波を上下方向および左右方向に所定の角度範囲で放射し、路面、先々行車、路面と順に反射されてきたレーダ波を演算処理することにより、先々行車を認識するとしている。しかしながら、レーダ波は上下方向に所定の角度範囲で放射されるものであるため、実際には、図12に示されるように、ミリ波レーダ装置は、自車J1から斜め上方に放射されたレーダ波が路面上方の行き先案内標識Kや歩道橋で反射され、その反射されたレーダ波を受信することもある。特許文献1におけるミリ波レーダ装置は、このような場合を想定しておらず、レーダ波が到来する上下方向角度を認識していないため、先行車J2より遠くに検出された物体を、実際には行き先案内標識Kや歩道橋であるにも拘わらず先々行車であると誤認識する可能性がある。また、図13に示されるように、先行車が空荷のトラックJ3、トラクタ&トレーラである場合には、特許文献1におけるミリ波レーダ装置は、上下方向に所定の角度範囲で放射されるレーダ波によって、運転席があるキャブJ32を先々行車、荷台J31を先行車として(つまり、別々の物体として)誤認識してしまう可能性がある。
【0005】
また、近年は、車両走行時における安全性を向上させるべく、プリクラッシュセーフティシステム(Pre-Crash Safety System:衝突予防システム)やアダプティブクルーズシステム(Adaptive Cruise Control:車間距離制御システム)などの運転支援システムが開発されている。このような運転支援システムにおいても、先行車の動きだけでなく、その前方の先々行車の動きも正確に検知することができれば、安全性をより一層向上させることができるため、先々行車を正確に検出できる技術が要望されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−201881号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、このような実情に鑑みてなされたもので、自車に対する先々行車を正確に検出することができる物体検出装置、および、この物体検出装置を備えた車両制御装置の提供を目的とする。
【課題を解決するための手段】
【0008】
第1の発明は、
自車周囲に存在する物体を検出する物体検出装置であって、
レーダ波の送出により、上記自車に対する上記物体の左右方向角度および上下方向角度、並びに上記自車から上記物体までの距離を含むレーダ情報を取得するレーダ情報取得手段と、
上記レーダ情報に基づいて物体を認識する物体認識手段とを備え、
上記レーダ情報取得手段によって左右方向が同一で上記自車からの距離が異なる複数の上記レーダ情報が取得され、かつ、当該複数のレーダ情報のうち上記自車から最も近い物体以外の他の物体の上記上下方向角度または当該角度に基づく上下方向位置が予め定められた条件を満たす場合、上記物体認識手段は、上記他の物体のうち上記条件を満たす物体が上記自車から最も近い物体の向こう側に上記自車の走行の障害となり得る物体として存在すると判断する、物体検出装置である。
【0009】
第1の発明によれば、上下方向角度または当該角度に基づく上下方向位置が予め定められた条件を満たす場合、物体認識手段は、他の物体のうち条件を満たす物体が自車から最も近い物体の向こう側に自車の走行の障害となり得る物体として存在すると判断する。つまり、上下方向角度においてレーダ波が到来する方向を検出して、物体の存在を認識するので、自車から最も近い物体(例えば、先行車)の向こう側にあって自車の走行の障害となり得る物体(例えば、先々行車)の存在を正確に検出することができる。
【0010】
第2の発明は、第1の発明において、
上記条件は、上記他の物体の上記上下方向角度が斜め下向きの角度であることを特徴とする。
【0011】
第2の発明によれば、他の物体の上下方向角度が斜め下向きであること、つまり、レーダ波が斜め下方向から到来することを検出して、物体の存在を認識するので、自車から最も近い物体(例えば、先行車)の向こう側にあって自車の走行の障害となり得る物体(例えば、先々行車)の存在を正確に検出することができる。
【0012】
第3の発明は、第1の発明において、
上記条件は、上記他の物体の上記上下方向角度と上記距離とを用いて算出した上記他の物体の上下方向位置が上記路面より低い位置であることを特徴とする。
【0013】
第3の発明によれば、他の物体の上下方向位置が路面より低い位置であること、つまり、レーダ波が斜め下方向から到来することを検出して、物体の存在を認識するので、自車から最も近い物体(例えば、先行車)の向こう側にあって自車の走行の障害となり得る物体(例えば、先々行車)の存在を正確に検出することができる。
【0014】
第4の発明は、第1の発明において、
上記レーダ情報取得手段は、上記物体から到来した上記レーダ波の反射波強度を取得し、
上記レーダ情報取得手段が、左右方向が同一で上記自車からの距離が異なる複数の上記レーダ情報を取得し、かつ、当該複数のレーダ情報の反射波強度のうち上記自車から最も近い物体の反射波強度P1と最も近い物体以外の他の物体の反射波強度Pnとが、以下の(式1)の関係を満たす場合、上記物体認識手段は、反射波強度P1の物体の向こう側に、上記自車の走行の障害となり得る物体として反射波強度P1の物体よりも大きな反射波強度Pnの物体が存在すると判断することを特徴とする。
P1<Pn ・・・(式1)
【0015】
第4の発明によれば、レーダ波の反射波強度を取得し、取得した反射波強度P1、Pnの大小を比較して、反射波強度P1の物体の向こう側に、自車の走行の障害となり得る物体として反射波強度P1の物体よりも大きな反射波強度Pnの物体が存在すると判断する。よって、自車から最も近い物体(例えば、オートバイ)の向こう側にあって自車の走行の障害となり得る物体(例えば、四輪自動車)の存在を正確に検出することができる。
【0016】
第5の発明は、第2または第3の発明において、
上記物体認識手段は、上記自車から最も近い物体を先行車、上記他の物体を上記先行車に先行する先々行車であると認識することを特徴とする。
【0017】
第5の発明によれば、先行車の前方の先々行車の存在を正確に検出することができる。
【0018】
第6の発明は、第4の発明において、
上記反射波強度P1の物体が二輪車、上記反射波強度Pnの物体が四輪自動車であること特徴とする。
【0019】
第6の発明によれば、二輪車(先行車)の前方の四輪自動車(先々行車)の存在を正確に検出することができる。
【0020】
第7の発明は、
第5の発明に係る物体検出装置と、
上記先行車と上記先々行車の間隔、または、上記自車と上記先々行車の間隔の少なくともいずれか一方に応じて、アダプティブクルーズシステム(Adaptive Cruise Control)、プリクラッシュセーフティシステム(Pre-Crash Safety System)、またはアイドリングストップシステム(Idoling Stop System)のうち、少なくともいずれか一つを制御する制御手段とを備えた、車両制御装置である。
【0021】
第7の発明によれば、先々行車の動きに応じて、アダプティブクルーズシステム等を早いタイミングで適切に制御することができる。
【0022】
第8の発明は、
上記レーダ情報取得手段は、上記自車と上記先々行車の第1相対速度、または、上記自車と上記先行車の第2相対速度の少なくともいずれか一方を取得する、第5の発明に係る物体認識装置と、
上記第1相対速度または上記第2相対速度の少なくともいずれか一方に応じて、アダプティブクルーズシステム(Adaptive Cruise Control System)、プリクラッシュセーフティシステム(Pre-Crash Safety System)、またはアイドリングストップシステム(Idoling Stop System)のうち、少なくともいずれか一つを制御する制御手段とを備えた、車両制御装置である。
【0023】
第8の発明によれば、先々行車の動きに応じて、アダプティブクルーズシステム等を早いタイミングで適切に制御することができる。
【発明の効果】
【0024】
本発明によれば、自車に対する先々行車を正確に検出することができる。
【図面の簡単な説明】
【0025】
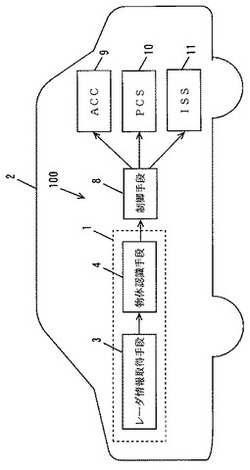
【図1】本発明の第1実施形態に係る物体検出装置の構成を示すブロック図
【図2】本発明の第1実施形態に係る物体検出装置によって先々行車が検出される様子を示す図
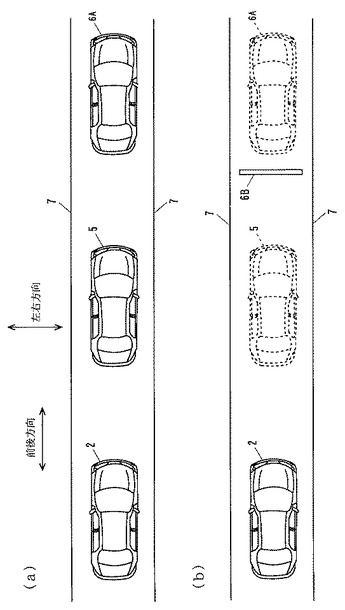
【図3】(a)は図2に示される物体5(先行車)、物体6A(先々行車)の位置を示す平面図であり、(b)は図2に示される物体6B(行き先案内看板)の位置を示す平面図
【図4】上下方向角度θについて説明する図
【図5】本発明の第1実施形態に係る物体検出装置の動作を示すフローチャート
【図6】本発明の第2実施形態において、図2に示す反射波R2を用いて他の物体の高さを算出する過程を示す図
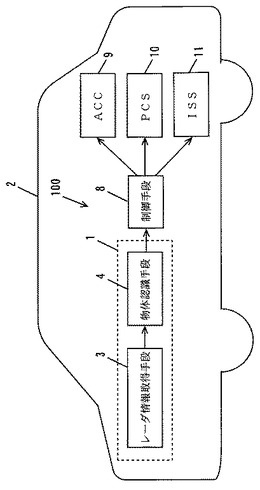
【図7】本発明の第3実施形態に係る物体検出装置を示すブロック図
【図8】本発明の第3実施形態に係る物体検出装置によって先々行車が検出される様子を示す側面図
【図9】本発明の第3実施形態において、自車から先行車および先々行車を見た様子を示す図
【図10】先行車(二輪車)で反射されて自車に到来した反射波の受信レベルと、先々行車(四輪自動車)で反射されて自車に到来した反射波の受信レベルを、自車からの距離とともに示す図
【図11】本発明の第3実施形態に係る物体検出装置の動作を示すフローチャート
【図12】従来の物体検出装置で前方物体を検出する様子を示す図
【図13】従来の物体検出装置で前方物体を検出する様子を示す図
【発明を実施するための形態】
【0026】
(第1実施形態)
本発明の第1実施形態に係る物体検出装置について、図面を参照しつつ説明する。図1は、本発明の第1実施形態に係る物体検出装置の構成を示すブロック図である。図2は、第1実施形態に係る物体検出装置によって先々行車が検出される様子を示す側面図である。
【0027】
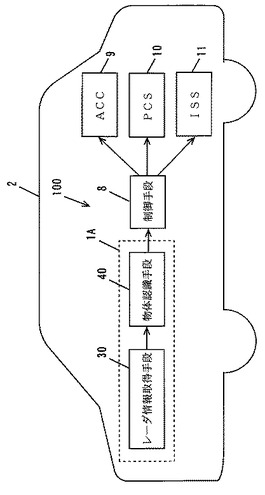
図1に示されるように、第1実施形態に係る物体検出装置1は、自車2に搭載され、自車2の周囲に存在する物体(図2に示される例では、物体5,6A,6B)を検出する装置である。物体検出装置1は、レーダ情報取得手段3と、物体認識手段4と、制御手段8とを備えている。物体検出装置1は、制御手段8とともに車両制御装置100を構成する。以下、自車2の周囲に存在する物体が、物体5,6A,6Bである場合を例にとって説明する。なお、本実施形態は、先々行車に相当する物体を正確に検出する点に特徴があるので、先々行車に相当する物体の検出について重点的に説明する。また、先行車に相当する物体の検出方法については、従来公知の方法と特に変わらないので、その説明については省略する。
【0028】
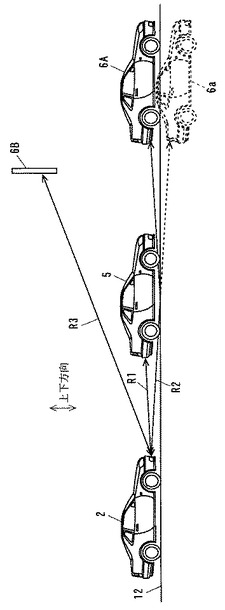
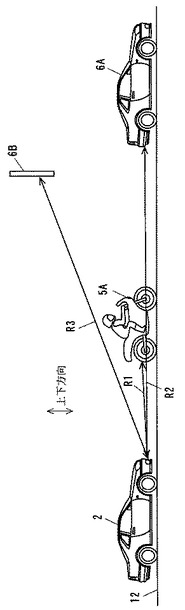
レーダ情報取得手段3は、図2に示されるように、レーダ波の送出により、物体5,6A,6Bについて、自車2に対する左右方向角度および上下方向角度、自車2からの距離、および自車2との相対速度を含むレーダ情報を取得する。図2に示される例では、物体5は、自車2の前方を走行する先行車(四輪自動車)であり、物体6Aは、物体5の前方を走行する先々行車(四輪自動車)である。また、物体6Bは、物体5の斜め上前方に存在する行き先案内看板である。図2に示される例では、物体6A、物体5、自車2は、同一の車線をこの順序で走行している車両であるものとする。
【0029】
図3(a)は、図2に示される物体5(先行車)、物体6A(先々行車)の位置を示す平面図である。図3(a)では、物体6Bの図示を省略している。図3(b)は、図2に示される物体6B(行き先案内看板)の位置を示す平面図である。図3(b)では、物体5、物体6Aを破線で示している。図3(a)(b)に示されるように、物体6A、物体5は、自車2から見て左右方向が同一であるものとする。図3(a)(b)に示される符号7は、車線を規定する白線である。なお、物体6Aの幅方向中心が、自車2の幅方向中心と物体5の幅方向中心を結ぶ直線から左右方向に多少ずれていたとしても、自車2から見て物体6Aの一部または全部が物体5によって隠蔽されるのであれば、物体6A、物体5は、自車2から見て左右方向が同一であるものとする。
【0030】
レーダ情報取得手段3としては、例えばレーザレーダ、マイクロ波レーダ、ミリ波レーダ、および超音波レーダ等を用いることができる。レーダ情報取得手段3は、電磁波等を自車2の周辺に送出し、自車2の周辺に存在する物体で反射する反射波を受信することにより、自車2の周辺に存在する物体についての上記レーダ情報を取得する。レーダ情報取得手段3は、例えば、自車2の正面前方を含む左右方向および上下方向の所定の角度範囲にレーダ波を送出する。図2に示される例では、便宜上、レーダ情報取得手段3のレーダ波受信部が物体5,6A,6Bについて受信するレーダ波の反射波を、それぞれ、反射波R1,R2,R3とする。
【0031】
物体認識手段4は、レーダ情報取得手段3が取得したレーダ情報に基づいて、物体5,6A,6Bを認識する。物体認識手段4は、以下のようにして物体を認識する。すなわち、レーダ情報取得手段3によって左右方向が同一で自車2からの距離が異なる複数のレーダ情報が取得され、かつ、当該複数のレーダ情報のうち自車2から最も近い物体5以外の他の物体の上下方向角度θが予め定められた条件を満たす場合、物体認識手段4は、他の物体6A,6Bのうち上記条件を満たす物体が自車2から最も近い物体5の向こう側に自車2の走行の障害となり得る物体として存在すると判断する。
【0032】
「自車2から最も近い物体5」は、具体的には、例えば先行車である。また、「自車2の向こう側に存在して自車2の走行の障害となり得る物体」とは、具体的には、例えば先行車の前方に存在する先々行車である。自車2から先々行車の全体が見える程度に先行車が左右方向に移動した場合、先々行車が自車2の走行の障害となり得るからである。また、先行車の前方に存在するガードレール等の路上固定物を、「自車2の向こう側に存在して自車2の走行の障害となり得る物体」としてもよい。自車2から路上固定物の全体が見える程度に先行車が左右方向に移動した場合、路上固定物が自車2の走行の障害となり得るからである。
【0033】
一方、行き先案内看板は、先行車の前方に存在していたとしても、自車2の走行の障害となり得ないので、「自車2の走行の障害となり得る物体」ではない。また、先行車がトラックである場合に、レーダ情報取得手段3が当該トラックの荷台とキャブについてそれぞれレーダ情報を取得したとしても、キャブは自車2の走行の障害とならないので、キャブは「自車2の走行の障害となり得る物体」ではない。
【0034】
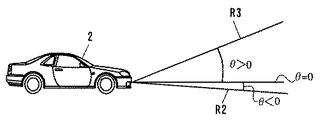
上記予め定められた条件は、例えば、他の物体の上下方向角度θが斜め下向きの角度であることである。図4は、上下方向角度θについて説明する図である。図4に示されるように、上下方向角度θは、自車2の真正面の方向(θ=0)を基準として上下方向に測定した角度であり、例えば、下向きの角度を負の値(θ<0)、上向きの角度を正の値(θ>0)として表すことができる。上下方向角度θが斜め下向きの角度であるということは、レーダ波の反射波が、斜め下方向から到来してレーダ情報取得手段3のレーダ波受信部に受信されたことを意味する。なお、角度θ測定の基準となる自車2の真正面の方向(θ=0)は、自車2が水平な路面上を走行しているときは、当該方向は水平方向である。また、自車2が上り勾配の路面上を走行しているときは、当該方向はその路面と平行な斜め上方向である。また、自車2が下り勾配の路面上を走行しているときは、当該方向はその路面と平行な斜め下方向である。
【0035】
図2に示される例では他の物体6Aが、上記予め定められた条件を満たしている。つまり、レーダ情報取得手段3のレーダ波送信部から送出されたレーダ波は、物体5(先行車)下方の路面12で反射されて物体6A(先々行車)に伝播する。物体6Aに伝播したレーダ波は、物体6Aで反射されて再び物体5下方の路面で反射され、反射波R2としてレーダ情報取得手段3のレーダ波受信部に受信される。反射波R2は、レーダ情報取得手段3のレーダ波受信部に向かって斜め下方向から到来している。レーダ波受信部は、反射波R2が斜め下方向から到来していることを検出し、これによって、他の物体6Aの上下方向角度θが斜め下向きの角度であると判断する。自車2から斜め下方向には、実際には物体6Aは存在せず、自車2からは物体6Aの虚像6aが見えているだけである。しかしながら、この状況が、自車2から見て物体5の向こう側に物体6Aが存在し、かつ、物体6Aが自車2の走行の障害となり得る物体として存在することを示すのである。よって、他の物体6Aは、自車2から最も近い物体5の向こう側に自車2の走行の障害となり得る物体として存在すると判断され、具体的には先々行車であると判断される。
【0036】
一方、物体6B(行き先案内看板)については、上記予め定められた条件が満たされていない。すなわち、物体6Bについては、上下方向角度θが斜め上向きの角度(θ>0)である。このため、自車2から見て物体5の向こう側に物体6Bが存在したとても、物体6Bは自車2の走行の障害となり得る物体ではないと判断される。これは、上下方向角度θが斜め上向きの角度である場合、この物体は行き先案内看板のように先行車の上方にある物体であったり、或いは、先行車がトラックである場合にそのキャブであることが多く、通常は自車2の走行の障害となり得る物体ではないからである。図2に示される例では、物体6Bは、行き先案内看板であって、自車2から見て高い位置にあるので、自車2と接触する可能性はない。先行車がトラックである場合(図13参照)には、物体検出装置1は、トラックの荷台後部を自車2から最も近い物体(先行車)として認識するが、キャブで反射されたレーダ波(反射波)は、自車2に向かって斜め上方から到来するので、当該反射波は上記予め定められた条件を満たさない。よって、キャブが先々行車であると誤認識されることはない。
【0037】
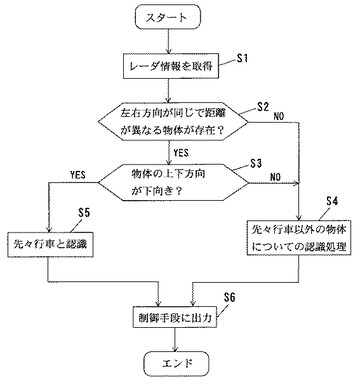
次に、図5を用いて、自車2に搭載された物体検出装置1の動作について説明する。図5は、物体検出装置1の動作を示すフローチャートである。ここでは、図2に示される場面を想定する。
【0038】
まず、レーダ情報取得手段3は、自車2の前方にレーダ波を送出する。これにより、レーダ情報取得手段3は、物体5,物体6A,物体6Bについて、それぞれ、自車2に対する左右方向角度および上下方向角度、自車2からの距離、および自車2との相対速度を含むレーダ情報を取得する(ステップS1)。
【0039】
次に、物体認識手段4は、レーダ情報取得手段3が取得したレーダ情報に基づいて、物体を認識する(ステップS2〜S5)。具体的には、物体認識手段4は、まず、自車2から見て左右方向が同じで、かつ、自車2からの距離が異なる複数の物体が存在するかどうかを判断する(ステップS2)。ステップS2において、自車2からの距離が異なる複数の物体が存在すると判断された場合には、ステップS3に進む。図2に示される例では、自車2の前方に、物体5、物体6A、物体6Bが存在するので、ステップS3に進む。一方、ステップS2において、自車2からの距離が異なる複数の物体が存在しないと判断された場合には、ステップS4に進む。なお、ステップS2の判断において「自車2からの距離が異なる複数の物体が存在しない」には、1つの物体についてのみレーダ情報が得られた場合や、全くレーダ情報が得られない場合が含まれる。
【0040】
上記ステップS3においては、複数のレーダ情報のうち自車2から最も近い物体5以外の他の物体5,6A,6Bの上下方向角度θが予め定められた条件(θ<0)を満たすかどうか、つまり他の物体の上下方向角度θが下向きかどうかを判断する。ステップS3において、予め定められた条件(θ<0)が満たされる他の物体については、自車2から最も近い物体(具体的には、例えば先行車)の向こう側にあって自車2の走行の障害となり得る物体(具体的には、例えば先々行車)であると認識される(ステップS5)。図2に示される例では、他の物体6Aのみが予め定められた条件を満たす。よって、他の物体6Aが、自車2から最も近い物体5(例えば先行車)の向こう側にあって自車2の走行の障害となり得る物体(例えば先々行車)であると認識される。その後、物体の認識情報を制御手段8に出力する(ステップS6)し、処理を終了する。なお、制御手段8は、物体の認識情報に基づいて種々の車両制御システムを制御する。一方、ステップS3において、予め定められた条件(θ<0)が満たされない他の物体については、ステップS4に進む。
【0041】
制御手段8は、アダプティブクルーズシステム(Adaptive Cruise Control System)、プリクラッシュセーフティシステム(Pre-Crash Safety System)、またはアイドリングストップシステム(Idoling Stop System)のうち、少なくともいずれか一つを制御するものである。つまり、物体B(例えば先々行車)の位置および速度等に関する情報が、制御手段8に出力され、車両の各種制御に用いられる。
【0042】
ステップS4においては、物体が自車2から最も近い物体(例えば先行車)の向こう側にあるものの、自車2の走行の障害となり得る物体(例えば先々行車)ではないことを前提とした、物体の認識処理が行われる。例えば、自車2に対する物体の上下方向角度θ、自車2からの距離、自車2との相対速度等の情報に基づいて、物体が何であるかが認識される。図2に示される例では、物体6Bが行き先案内看板であることが認識される。また、物体5と物体6Aの相対距離が一定時間に亘って変化しない場合には、物体5と物体6Aは一体であると判断され、例えば物体5と物体6Aとで1台のトラックが構成されていると認識される。その後、物体の認識情報が、制御手段に出力され(ステップS6)、処理が終了する。以上が、第1実施形態に係る物体検出装置1の動作である。
【0043】
第1実施形態によれば、上下方向角度θが予め定められた条件を満たす場合、物体認識手段4は、他の物体5,6Aのうち条件を満たす物体6Aが自車2から最も近い物体5の向こう側に自車2の走行の障害となり得る物体(例えば先々行車)として存在すると判断する。つまり、上下方向においてレーダ波が到来する方向を検出して、物体の存在を認識するので、自車2から最も近い物体5(例えば先行車)の向こう側にあって自車2の走行の障害となり得る物体6A(例えば先々行車)の存在を正確に検出することができる。
【0044】
(第2実施形態)
本発明に係る第2実施形態について、図面を参照しつつ説明する。図6は、第2実施形態を説明するための図であり、図2に示す反射波R2を用いて他の物体の高さを算出する過程を示す図である。なお、第1実施形態と同様の構成については、同じ参照符号を付してその説明を省略する。
【0045】
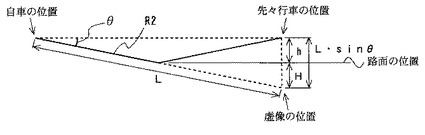
上記第1実施形態では、上記予め定められた条件は、他の物体の上下方向角度θが斜め下向きの角度であることであった。第2実施形態では、この条件に代えて以下の条件を採用する。すなわち、第2実施形態における予め定められた条件は、自車2に対する他の物体の上下方向角度θ(図6参照)と、自車2から他の物体の虚像までの距離L(他の物体までの距離に略等しい)と、を用いて算出した当該他の物体の虚像の上下方向位置が路面12より低い位置であることである。この条件を満たすかどうかは、例えば以下の式1に基づいて判定することができる。なお、上記の説明では、虚像までの距離、虚像の上下方向位置という表現をしたが、レーダ情報取得手段3から見れば、これらが実像或いは虚像のいずれまでの距離、いずれの上下方向位置なのかどうかは分からない。
【0046】
H=L×sinθ+h<0 ・・・(式1)
【0047】
ここで、各文字の意味は、図6に示されるように、H:他の物体の路面12からの高さ、L:自車2のレーダ装置から他の物体までの距離、h:路面12から自車2のレーダ装置までの高さである。上下方向角度θについては、路面12と平行な方向を基準として、下向きの角度である場合にはθは負(θ<0)、上向きの角度である場合にはθは正(θ>0)、路面と平行の向きである場合にはθはゼロ(θ=0)である。
【0048】
図2、図4に示されるように、物体6Aについては、θは負である。よって、L×sinθの値も負となる。物体6Aについては、L×sinθの絶対値がhよりも大きいので、L×sinθ+h<0の関係が満たされる。従って、物体6Aは、自車2から最も近い物体5(例えば先行車)の向こう側に位置して自車2の走行の障害となり得る物体(例えば先々行車)であると判断される。
【0049】
一方、他の物体が行き先案内看板や、トラックのキャブである場合には、上下方向角度θが正となるので、必然的にL×sinθ+h>0となり、上記式1の関係は満たされない。よって、物体6B等は、自車2の走行の障害となり得る物体であるとは判断されず、先々行車であるとは判断されない。
【0050】
なお、本実施形態における予め定められた条件は、上記した式1に限定されない。例えば、Lの値が大きく、hを考慮する必要がない場合には、以下の式2に変更することも可能である。
【0051】
H=L×sinθ<0 ・・・(式2)
【0052】
第2実施形態においても、上記第1実施形態と同様の効果を奏することができる。
【0053】
(第3実施形態)
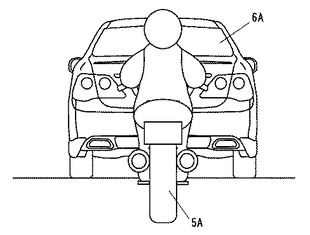
本発明の第3実施形態について、図面を参照しつつ説明する。図7は、第3実施形態に係る物体検出装置を示すブロック図である。図8は、第3実施形態に係る物体検出装置によって先々行車が検出される様子を示す側面図である。図9は、第3実施形態において、自車から先行車および先々行車を見た様子を示す図である。なお、第1実施形態と同様の構成については、第1実施形態と同様の符号を付して、その説明を省略する。
【0054】
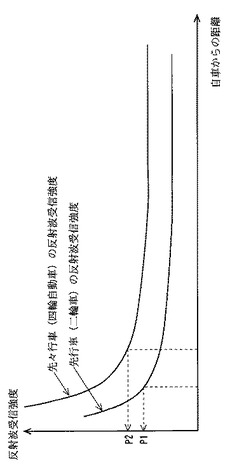
第3実施形態は、図8,9に示されるように、先行車が二輪車で、先々行車が四輪自動車である場合を想定している。図10は、先行車(二輪車)で反射されて自車2に到来したレーダ波の反射波の受信レベルと、先々行車(四輪自動車)で反射されて自車2に到来したレーダ波の反射波の受信レベルを、自車2からの距離とともに示す図である。図10に示されるように、自車2から先行車までの距離が自車から先々行車までの距離よりある程度近くても、先々行車から到来した反射波の受信レベル(強度)の方が先行車から到来した反射波の受信レベル(強度)よりも高い。第3実施形態は、この点に鑑みてなされた発明である。以下、具体的に説明する。
【0055】
以下、自車2の周囲に存在する物体が、物体5A,6A,6Bである場合を例にとって説明する。第1実施形態では、先行車である物体5が四輪自動車である場合を例にとって説明したが、本実施形態では、先行車である物体5Aは、二輪車である。二輪車には、オートバイの他、自転車も含まれる。
【0056】
なお、本実施形態は、先々行車に相当する物体を正確に検出する点に特徴があるので、先々行車に相当する物体の検出について重点的に説明する。
【0057】
第3実施形態においては、レーダ情報取得手段3に代えてレーダ情報取得装置30、物体認識手段4に代えて物体認識手段40が設けられており、その他の構成は第1実施形態と同様である。
【0058】
第3実施形態において、レーダ情報取得手段30は、レーダ情報取得手段3が有する上記の機能に加えて、物体から到来したレーダ波(反射波)の受信強度を取得する。
【0059】
図7に示されるように、物体認識手段40は、物体認識手段4が有する機能に加えて、以下の機能を有している。すなわち、物体認識手段40は、レーダ情報取得手段30が取得したレーダ情報のうち、上記した反射波の受信強度等に基づいて、以下のようにして物体を認識する。
【0060】
レーダ情報取得手段30が、左右方向が同一で自車2からの距離が異なる複数のレーダ情報を取得し、かつ、当該複数のレーダ情報の受信強度のうち自車2から最も近い物体の受信強度P1と最も近い物体以外の他の物体の受信強度Pnとが、以下の(式2)の関係を満たす場合、物体認識手段40は、受信強度P1の物体の向こう側に、自車2の走行の障害となり得る物体として受信強度P1の物体よりも大きな受信強度Pnの物体が存在すると判断する。
【0061】
P1<Pn ・・・(式3)
【0062】
「自車2から最も近い物体5A」は、具体的には、例えば、先行車としての二輪車である。また、「自車2の向こう側に存在して自車2の走行の障害となり得る物体」とは、具体的には、例えば先々行車としての四輪自動車である。自車2から先々行車の全体が見える程度に先行車が左右方向に移動した場合、先々行車が自車2の走行の障害となり得るからである。
【0063】
上記したように、自車2から先行車(例えば二輪車)までの距離が自車2から先々行車(例えば四輪自動車)までの距離よりある程度近くても、先々行車から到来した反射波の受信レベルの方が、先行車から到来した反射波の受信レベルよりも高くなる。よって、上記式3の条件が満たされれば、物体認識手段40は、先行車として例えば二輪車が存在し、先々行車として例えば四輪自動車が存在することを認識することができる。
【0064】
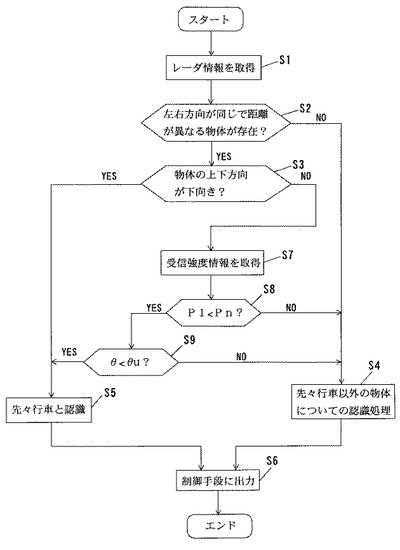
次に、図11を用いて、自車2に搭載された物体検出装置1Aの動作について説明する。図11は、物体検出装置1Aの動作を示すフローチャートである。ここでは、図8,9に示される場面を想定する。なお、図11のフローチャートにおいて、ステップS1〜S2、S3〜S6については第1実施形態と同様なので、その説明を省略する。
【0065】
本実施形態では、ステップS3において、予め定められた条件(θ<0)が満たされる他の物体については、自車2から最も近い物体(例えば先行車としての四輪自動車)の向こう側にあって自車2の走行の障害となり得る物体(例えば先々行車としての四輪自動車)であると認識する(ステップS5)。一方、ステップS3において、予め定められた条件(θ<0)が満たされない他の物体(θ≧0)については、ステップS7に進む。
【0066】
ステップS7では、物体認識手段40は、レーダ情報取得手段30から、左右方向が同一で自車2からの距離が異なる複数の物体についての反射波の受信強度を取得する。
【0067】
次いで、ステップS8では、左右方向が同一で自車2からの距離が異なる複数の物体についての受信強度のうち自車2から最も近い物体の受信強度P1と当該最も近い物体以外の他の物体の受信強度Pnとが、P1<Pnの関係を満たすかどうかを判断する。この関係が満たされる場合、ステップS9に進む。図8,9に示される例では、物体6A(先々行車としての四輪自動車)と物体6B(行き先案内看板)がこの関係を満たす。
【0068】
ステップS9では、P1<Pnの関係を満たす物体の上下方向角度θが、予め定められた角度θuより小さい(θ<θu)かどうかが判断される。θuは、判断の対象となる物体が自車2の走行の障害となり得る物体となり得るかどうかの判断基準となる値である。
【0069】
ステップS9において、θ<θuの関係が満たされた場合、物体認識手段40は、受信強度P1の物体の向こう側に、自車2の走行の障害となり得る物体として受信強度P1の物体よりも大きな受信強度Pnの物体が存在すると判断する。図8,9に示される例では、受信強度P1の物体として先行車(例えば二輪車)が存在し、受信強度Pnの物体として先々行車(例えば四輪自動車)が存在すると判断される。一方、ステップS9において、θ<θuの関係が満たされない場合(θ≧θu)、ステップS4に進む。ステップS4以降の処理については、第1実施形態と同様なので、その説明を省略する。以上が、物体検出装置1Aの動作である。
【0070】
第3実施形態においては、先行車が二輪車であることによって、先々行車で反射されたレーダ波のうち路面で反射されずに自車2に直接到来したレーダ波が自車2で受信された場合であっても、先々行車を確実に認識することができる。
【0071】
なお、上記各実施形態は、上記の例に限られず、以下のように変更することも可能である。例えば、検出対象の物体が遠方にある場合には、物体の左右方向が同一か否かの判別精度が低下する。そこで、自車2から検出対象物体まで距離が遠過ぎる場合には、認識の対象から除外してもよい。例えば、上記ステップS3において、上記した判断に加えて、さらに以下の式4、5の双方を満たすかどうかを判断し、式4、5の双方を満たす場合にのみステップS5に進むようにしてもよい。
【0072】
Ld1<L1<Lu1 ・・・(式4)
Ld2<L2−L1<Lu2 ・・・(式5)
【0073】
ここで、L1:自車2に対し自車2から最も近い物体(例えば先行車)までの距離、L2:自車2に対し自車2から最も近い物体以外の物体(例えば先々行車)までの距離、Ld1,Lu1,Ld2,Lu2:予め設定された閾値である。Ld1,Ld2は、例えば5〜10m、Lu1,Lu2は、例えば50〜100mに設定することができる。
【0074】
このようにすれば、複数の物体が検出され、少なくともいずれか一つの物体が遠方にある場合に、先々行車であるかどうかの認識対象から除外し、誤認識の可能性を低減することができる。
【0075】
また、制御手段8を、先行車と先々行車の間隔、または、自車2と先々行車の間隔の少なくともいずれか一方に応じて、アダプティブクルーズシステム(Adaptive Cruise Control)、プリクラッシュセーフティシステム(Pre-Crash Safety System)、またはアイドリングストップシステム(Idoling Stop System)のうち、少なくともいずれか一つを制御するものとしてもよい。これにより、各システムをより適切に制御することができる。
【0076】
また、位置情報検出部3,30を、上記の機能に加えて、さらに、自車2と先々行車の第1相対速度、または、自車2と先行車の第2相対速度の少なくともいずれか一方を取得するものとし、制御手段8を、第1相対速度または第2相対速度の少なくともいずれか一方に応じて、アダプティブクルーズシステム(Adaptive Cruise Control System)、プリクラッシュセーフティシステム(Pre-Crash Safety System)、またはアイドリングストップシステム(Idoling Stop System)のうち、少なくともいずれか一つを制御するものとしてもよい。これにより、各システムをより適切に制御することができる。
【産業上の利用可能性】
【0077】
本発明は、自車に対する先々行車を正確に検出することができる物体検出装置およびこの物体検出装置を備えた車両制御装置等に利用可能である。
【符号の説明】
【0078】
1、1A 物体検出装置
2 自車
3、30 レーダ情報取得手段
4、40 物体認識装置
5 自車から最も近い物体(先行車)
6A 他の物体(先々行車)
6B 他の物体(行き先案内看板)
7 白線
8 制御手段
9 ACC
10 PCS
11 ISS
θ 上下方向角度
H 他の物体の路面からの高さ
L 自車のレーダ装置から他の物体までの距離
h 路面から自車のレーダ装置までの高さ
【技術分野】
【0001】
本発明は、物体検出装置および車両制御装置に関し、より詳しくは、自車に対する先々行車を正確に検出することができる物体検出装置およびこの物体検出装置を備えた車両制御装置に関する。
【背景技術】
【0002】
近年、燃費向上や排気ガス抑制のためアイドリングストップシステム(Idoling Stop System)が開発されている。また、従来のアイドリングストップシステムには、自車前方の先行車、さらにはその前方の先々行車両の動きを検出して、エンジンの停止および始動のタイミングを判断するものが提案されている。
【0003】
例えば、特許文献1に記載のアイドル制御装置は、ミリ波レーダ装置が自車両前方の先々行車の動きを検出し、検出した先々行車の動きに応じて、自車のエンジンを始動してアイドルスタート状態に制御するものとして提案されている。特許文献1の記載によると、ミリ波レーダ装置から放射されたレーダ波は、先行車下方の路面で反射されて先々行車に伝播し、先々行車で反射されて再び先行車下方の路面で反射されてミリ波レーダ装置に受信される。ミリ波レーダ装置に受信されたレーダ波を演算処理することにより、先々行車と自車の相対速度および相対位置を測定することができる。
【0004】
しかしながら、特許文献1に記載のアイドル制御装置には、以下の課題があった。すなわち、特許文献1におけるミリ波レーダ装置は、レーダ波を上下方向および左右方向に所定の角度範囲で放射し、路面、先々行車、路面と順に反射されてきたレーダ波を演算処理することにより、先々行車を認識するとしている。しかしながら、レーダ波は上下方向に所定の角度範囲で放射されるものであるため、実際には、図12に示されるように、ミリ波レーダ装置は、自車J1から斜め上方に放射されたレーダ波が路面上方の行き先案内標識Kや歩道橋で反射され、その反射されたレーダ波を受信することもある。特許文献1におけるミリ波レーダ装置は、このような場合を想定しておらず、レーダ波が到来する上下方向角度を認識していないため、先行車J2より遠くに検出された物体を、実際には行き先案内標識Kや歩道橋であるにも拘わらず先々行車であると誤認識する可能性がある。また、図13に示されるように、先行車が空荷のトラックJ3、トラクタ&トレーラである場合には、特許文献1におけるミリ波レーダ装置は、上下方向に所定の角度範囲で放射されるレーダ波によって、運転席があるキャブJ32を先々行車、荷台J31を先行車として(つまり、別々の物体として)誤認識してしまう可能性がある。
【0005】
また、近年は、車両走行時における安全性を向上させるべく、プリクラッシュセーフティシステム(Pre-Crash Safety System:衝突予防システム)やアダプティブクルーズシステム(Adaptive Cruise Control:車間距離制御システム)などの運転支援システムが開発されている。このような運転支援システムにおいても、先行車の動きだけでなく、その前方の先々行車の動きも正確に検知することができれば、安全性をより一層向上させることができるため、先々行車を正確に検出できる技術が要望されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−201881号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、このような実情に鑑みてなされたもので、自車に対する先々行車を正確に検出することができる物体検出装置、および、この物体検出装置を備えた車両制御装置の提供を目的とする。
【課題を解決するための手段】
【0008】
第1の発明は、
自車周囲に存在する物体を検出する物体検出装置であって、
レーダ波の送出により、上記自車に対する上記物体の左右方向角度および上下方向角度、並びに上記自車から上記物体までの距離を含むレーダ情報を取得するレーダ情報取得手段と、
上記レーダ情報に基づいて物体を認識する物体認識手段とを備え、
上記レーダ情報取得手段によって左右方向が同一で上記自車からの距離が異なる複数の上記レーダ情報が取得され、かつ、当該複数のレーダ情報のうち上記自車から最も近い物体以外の他の物体の上記上下方向角度または当該角度に基づく上下方向位置が予め定められた条件を満たす場合、上記物体認識手段は、上記他の物体のうち上記条件を満たす物体が上記自車から最も近い物体の向こう側に上記自車の走行の障害となり得る物体として存在すると判断する、物体検出装置である。
【0009】
第1の発明によれば、上下方向角度または当該角度に基づく上下方向位置が予め定められた条件を満たす場合、物体認識手段は、他の物体のうち条件を満たす物体が自車から最も近い物体の向こう側に自車の走行の障害となり得る物体として存在すると判断する。つまり、上下方向角度においてレーダ波が到来する方向を検出して、物体の存在を認識するので、自車から最も近い物体(例えば、先行車)の向こう側にあって自車の走行の障害となり得る物体(例えば、先々行車)の存在を正確に検出することができる。
【0010】
第2の発明は、第1の発明において、
上記条件は、上記他の物体の上記上下方向角度が斜め下向きの角度であることを特徴とする。
【0011】
第2の発明によれば、他の物体の上下方向角度が斜め下向きであること、つまり、レーダ波が斜め下方向から到来することを検出して、物体の存在を認識するので、自車から最も近い物体(例えば、先行車)の向こう側にあって自車の走行の障害となり得る物体(例えば、先々行車)の存在を正確に検出することができる。
【0012】
第3の発明は、第1の発明において、
上記条件は、上記他の物体の上記上下方向角度と上記距離とを用いて算出した上記他の物体の上下方向位置が上記路面より低い位置であることを特徴とする。
【0013】
第3の発明によれば、他の物体の上下方向位置が路面より低い位置であること、つまり、レーダ波が斜め下方向から到来することを検出して、物体の存在を認識するので、自車から最も近い物体(例えば、先行車)の向こう側にあって自車の走行の障害となり得る物体(例えば、先々行車)の存在を正確に検出することができる。
【0014】
第4の発明は、第1の発明において、
上記レーダ情報取得手段は、上記物体から到来した上記レーダ波の反射波強度を取得し、
上記レーダ情報取得手段が、左右方向が同一で上記自車からの距離が異なる複数の上記レーダ情報を取得し、かつ、当該複数のレーダ情報の反射波強度のうち上記自車から最も近い物体の反射波強度P1と最も近い物体以外の他の物体の反射波強度Pnとが、以下の(式1)の関係を満たす場合、上記物体認識手段は、反射波強度P1の物体の向こう側に、上記自車の走行の障害となり得る物体として反射波強度P1の物体よりも大きな反射波強度Pnの物体が存在すると判断することを特徴とする。
P1<Pn ・・・(式1)
【0015】
第4の発明によれば、レーダ波の反射波強度を取得し、取得した反射波強度P1、Pnの大小を比較して、反射波強度P1の物体の向こう側に、自車の走行の障害となり得る物体として反射波強度P1の物体よりも大きな反射波強度Pnの物体が存在すると判断する。よって、自車から最も近い物体(例えば、オートバイ)の向こう側にあって自車の走行の障害となり得る物体(例えば、四輪自動車)の存在を正確に検出することができる。
【0016】
第5の発明は、第2または第3の発明において、
上記物体認識手段は、上記自車から最も近い物体を先行車、上記他の物体を上記先行車に先行する先々行車であると認識することを特徴とする。
【0017】
第5の発明によれば、先行車の前方の先々行車の存在を正確に検出することができる。
【0018】
第6の発明は、第4の発明において、
上記反射波強度P1の物体が二輪車、上記反射波強度Pnの物体が四輪自動車であること特徴とする。
【0019】
第6の発明によれば、二輪車(先行車)の前方の四輪自動車(先々行車)の存在を正確に検出することができる。
【0020】
第7の発明は、
第5の発明に係る物体検出装置と、
上記先行車と上記先々行車の間隔、または、上記自車と上記先々行車の間隔の少なくともいずれか一方に応じて、アダプティブクルーズシステム(Adaptive Cruise Control)、プリクラッシュセーフティシステム(Pre-Crash Safety System)、またはアイドリングストップシステム(Idoling Stop System)のうち、少なくともいずれか一つを制御する制御手段とを備えた、車両制御装置である。
【0021】
第7の発明によれば、先々行車の動きに応じて、アダプティブクルーズシステム等を早いタイミングで適切に制御することができる。
【0022】
第8の発明は、
上記レーダ情報取得手段は、上記自車と上記先々行車の第1相対速度、または、上記自車と上記先行車の第2相対速度の少なくともいずれか一方を取得する、第5の発明に係る物体認識装置と、
上記第1相対速度または上記第2相対速度の少なくともいずれか一方に応じて、アダプティブクルーズシステム(Adaptive Cruise Control System)、プリクラッシュセーフティシステム(Pre-Crash Safety System)、またはアイドリングストップシステム(Idoling Stop System)のうち、少なくともいずれか一つを制御する制御手段とを備えた、車両制御装置である。
【0023】
第8の発明によれば、先々行車の動きに応じて、アダプティブクルーズシステム等を早いタイミングで適切に制御することができる。
【発明の効果】
【0024】
本発明によれば、自車に対する先々行車を正確に検出することができる。
【図面の簡単な説明】
【0025】
【図1】本発明の第1実施形態に係る物体検出装置の構成を示すブロック図
【図2】本発明の第1実施形態に係る物体検出装置によって先々行車が検出される様子を示す図
【図3】(a)は図2に示される物体5(先行車)、物体6A(先々行車)の位置を示す平面図であり、(b)は図2に示される物体6B(行き先案内看板)の位置を示す平面図
【図4】上下方向角度θについて説明する図
【図5】本発明の第1実施形態に係る物体検出装置の動作を示すフローチャート
【図6】本発明の第2実施形態において、図2に示す反射波R2を用いて他の物体の高さを算出する過程を示す図
【図7】本発明の第3実施形態に係る物体検出装置を示すブロック図
【図8】本発明の第3実施形態に係る物体検出装置によって先々行車が検出される様子を示す側面図
【図9】本発明の第3実施形態において、自車から先行車および先々行車を見た様子を示す図
【図10】先行車(二輪車)で反射されて自車に到来した反射波の受信レベルと、先々行車(四輪自動車)で反射されて自車に到来した反射波の受信レベルを、自車からの距離とともに示す図
【図11】本発明の第3実施形態に係る物体検出装置の動作を示すフローチャート
【図12】従来の物体検出装置で前方物体を検出する様子を示す図
【図13】従来の物体検出装置で前方物体を検出する様子を示す図
【発明を実施するための形態】
【0026】
(第1実施形態)
本発明の第1実施形態に係る物体検出装置について、図面を参照しつつ説明する。図1は、本発明の第1実施形態に係る物体検出装置の構成を示すブロック図である。図2は、第1実施形態に係る物体検出装置によって先々行車が検出される様子を示す側面図である。
【0027】
図1に示されるように、第1実施形態に係る物体検出装置1は、自車2に搭載され、自車2の周囲に存在する物体(図2に示される例では、物体5,6A,6B)を検出する装置である。物体検出装置1は、レーダ情報取得手段3と、物体認識手段4と、制御手段8とを備えている。物体検出装置1は、制御手段8とともに車両制御装置100を構成する。以下、自車2の周囲に存在する物体が、物体5,6A,6Bである場合を例にとって説明する。なお、本実施形態は、先々行車に相当する物体を正確に検出する点に特徴があるので、先々行車に相当する物体の検出について重点的に説明する。また、先行車に相当する物体の検出方法については、従来公知の方法と特に変わらないので、その説明については省略する。
【0028】
レーダ情報取得手段3は、図2に示されるように、レーダ波の送出により、物体5,6A,6Bについて、自車2に対する左右方向角度および上下方向角度、自車2からの距離、および自車2との相対速度を含むレーダ情報を取得する。図2に示される例では、物体5は、自車2の前方を走行する先行車(四輪自動車)であり、物体6Aは、物体5の前方を走行する先々行車(四輪自動車)である。また、物体6Bは、物体5の斜め上前方に存在する行き先案内看板である。図2に示される例では、物体6A、物体5、自車2は、同一の車線をこの順序で走行している車両であるものとする。
【0029】
図3(a)は、図2に示される物体5(先行車)、物体6A(先々行車)の位置を示す平面図である。図3(a)では、物体6Bの図示を省略している。図3(b)は、図2に示される物体6B(行き先案内看板)の位置を示す平面図である。図3(b)では、物体5、物体6Aを破線で示している。図3(a)(b)に示されるように、物体6A、物体5は、自車2から見て左右方向が同一であるものとする。図3(a)(b)に示される符号7は、車線を規定する白線である。なお、物体6Aの幅方向中心が、自車2の幅方向中心と物体5の幅方向中心を結ぶ直線から左右方向に多少ずれていたとしても、自車2から見て物体6Aの一部または全部が物体5によって隠蔽されるのであれば、物体6A、物体5は、自車2から見て左右方向が同一であるものとする。
【0030】
レーダ情報取得手段3としては、例えばレーザレーダ、マイクロ波レーダ、ミリ波レーダ、および超音波レーダ等を用いることができる。レーダ情報取得手段3は、電磁波等を自車2の周辺に送出し、自車2の周辺に存在する物体で反射する反射波を受信することにより、自車2の周辺に存在する物体についての上記レーダ情報を取得する。レーダ情報取得手段3は、例えば、自車2の正面前方を含む左右方向および上下方向の所定の角度範囲にレーダ波を送出する。図2に示される例では、便宜上、レーダ情報取得手段3のレーダ波受信部が物体5,6A,6Bについて受信するレーダ波の反射波を、それぞれ、反射波R1,R2,R3とする。
【0031】
物体認識手段4は、レーダ情報取得手段3が取得したレーダ情報に基づいて、物体5,6A,6Bを認識する。物体認識手段4は、以下のようにして物体を認識する。すなわち、レーダ情報取得手段3によって左右方向が同一で自車2からの距離が異なる複数のレーダ情報が取得され、かつ、当該複数のレーダ情報のうち自車2から最も近い物体5以外の他の物体の上下方向角度θが予め定められた条件を満たす場合、物体認識手段4は、他の物体6A,6Bのうち上記条件を満たす物体が自車2から最も近い物体5の向こう側に自車2の走行の障害となり得る物体として存在すると判断する。
【0032】
「自車2から最も近い物体5」は、具体的には、例えば先行車である。また、「自車2の向こう側に存在して自車2の走行の障害となり得る物体」とは、具体的には、例えば先行車の前方に存在する先々行車である。自車2から先々行車の全体が見える程度に先行車が左右方向に移動した場合、先々行車が自車2の走行の障害となり得るからである。また、先行車の前方に存在するガードレール等の路上固定物を、「自車2の向こう側に存在して自車2の走行の障害となり得る物体」としてもよい。自車2から路上固定物の全体が見える程度に先行車が左右方向に移動した場合、路上固定物が自車2の走行の障害となり得るからである。
【0033】
一方、行き先案内看板は、先行車の前方に存在していたとしても、自車2の走行の障害となり得ないので、「自車2の走行の障害となり得る物体」ではない。また、先行車がトラックである場合に、レーダ情報取得手段3が当該トラックの荷台とキャブについてそれぞれレーダ情報を取得したとしても、キャブは自車2の走行の障害とならないので、キャブは「自車2の走行の障害となり得る物体」ではない。
【0034】
上記予め定められた条件は、例えば、他の物体の上下方向角度θが斜め下向きの角度であることである。図4は、上下方向角度θについて説明する図である。図4に示されるように、上下方向角度θは、自車2の真正面の方向(θ=0)を基準として上下方向に測定した角度であり、例えば、下向きの角度を負の値(θ<0)、上向きの角度を正の値(θ>0)として表すことができる。上下方向角度θが斜め下向きの角度であるということは、レーダ波の反射波が、斜め下方向から到来してレーダ情報取得手段3のレーダ波受信部に受信されたことを意味する。なお、角度θ測定の基準となる自車2の真正面の方向(θ=0)は、自車2が水平な路面上を走行しているときは、当該方向は水平方向である。また、自車2が上り勾配の路面上を走行しているときは、当該方向はその路面と平行な斜め上方向である。また、自車2が下り勾配の路面上を走行しているときは、当該方向はその路面と平行な斜め下方向である。
【0035】
図2に示される例では他の物体6Aが、上記予め定められた条件を満たしている。つまり、レーダ情報取得手段3のレーダ波送信部から送出されたレーダ波は、物体5(先行車)下方の路面12で反射されて物体6A(先々行車)に伝播する。物体6Aに伝播したレーダ波は、物体6Aで反射されて再び物体5下方の路面で反射され、反射波R2としてレーダ情報取得手段3のレーダ波受信部に受信される。反射波R2は、レーダ情報取得手段3のレーダ波受信部に向かって斜め下方向から到来している。レーダ波受信部は、反射波R2が斜め下方向から到来していることを検出し、これによって、他の物体6Aの上下方向角度θが斜め下向きの角度であると判断する。自車2から斜め下方向には、実際には物体6Aは存在せず、自車2からは物体6Aの虚像6aが見えているだけである。しかしながら、この状況が、自車2から見て物体5の向こう側に物体6Aが存在し、かつ、物体6Aが自車2の走行の障害となり得る物体として存在することを示すのである。よって、他の物体6Aは、自車2から最も近い物体5の向こう側に自車2の走行の障害となり得る物体として存在すると判断され、具体的には先々行車であると判断される。
【0036】
一方、物体6B(行き先案内看板)については、上記予め定められた条件が満たされていない。すなわち、物体6Bについては、上下方向角度θが斜め上向きの角度(θ>0)である。このため、自車2から見て物体5の向こう側に物体6Bが存在したとても、物体6Bは自車2の走行の障害となり得る物体ではないと判断される。これは、上下方向角度θが斜め上向きの角度である場合、この物体は行き先案内看板のように先行車の上方にある物体であったり、或いは、先行車がトラックである場合にそのキャブであることが多く、通常は自車2の走行の障害となり得る物体ではないからである。図2に示される例では、物体6Bは、行き先案内看板であって、自車2から見て高い位置にあるので、自車2と接触する可能性はない。先行車がトラックである場合(図13参照)には、物体検出装置1は、トラックの荷台後部を自車2から最も近い物体(先行車)として認識するが、キャブで反射されたレーダ波(反射波)は、自車2に向かって斜め上方から到来するので、当該反射波は上記予め定められた条件を満たさない。よって、キャブが先々行車であると誤認識されることはない。
【0037】
次に、図5を用いて、自車2に搭載された物体検出装置1の動作について説明する。図5は、物体検出装置1の動作を示すフローチャートである。ここでは、図2に示される場面を想定する。
【0038】
まず、レーダ情報取得手段3は、自車2の前方にレーダ波を送出する。これにより、レーダ情報取得手段3は、物体5,物体6A,物体6Bについて、それぞれ、自車2に対する左右方向角度および上下方向角度、自車2からの距離、および自車2との相対速度を含むレーダ情報を取得する(ステップS1)。
【0039】
次に、物体認識手段4は、レーダ情報取得手段3が取得したレーダ情報に基づいて、物体を認識する(ステップS2〜S5)。具体的には、物体認識手段4は、まず、自車2から見て左右方向が同じで、かつ、自車2からの距離が異なる複数の物体が存在するかどうかを判断する(ステップS2)。ステップS2において、自車2からの距離が異なる複数の物体が存在すると判断された場合には、ステップS3に進む。図2に示される例では、自車2の前方に、物体5、物体6A、物体6Bが存在するので、ステップS3に進む。一方、ステップS2において、自車2からの距離が異なる複数の物体が存在しないと判断された場合には、ステップS4に進む。なお、ステップS2の判断において「自車2からの距離が異なる複数の物体が存在しない」には、1つの物体についてのみレーダ情報が得られた場合や、全くレーダ情報が得られない場合が含まれる。
【0040】
上記ステップS3においては、複数のレーダ情報のうち自車2から最も近い物体5以外の他の物体5,6A,6Bの上下方向角度θが予め定められた条件(θ<0)を満たすかどうか、つまり他の物体の上下方向角度θが下向きかどうかを判断する。ステップS3において、予め定められた条件(θ<0)が満たされる他の物体については、自車2から最も近い物体(具体的には、例えば先行車)の向こう側にあって自車2の走行の障害となり得る物体(具体的には、例えば先々行車)であると認識される(ステップS5)。図2に示される例では、他の物体6Aのみが予め定められた条件を満たす。よって、他の物体6Aが、自車2から最も近い物体5(例えば先行車)の向こう側にあって自車2の走行の障害となり得る物体(例えば先々行車)であると認識される。その後、物体の認識情報を制御手段8に出力する(ステップS6)し、処理を終了する。なお、制御手段8は、物体の認識情報に基づいて種々の車両制御システムを制御する。一方、ステップS3において、予め定められた条件(θ<0)が満たされない他の物体については、ステップS4に進む。
【0041】
制御手段8は、アダプティブクルーズシステム(Adaptive Cruise Control System)、プリクラッシュセーフティシステム(Pre-Crash Safety System)、またはアイドリングストップシステム(Idoling Stop System)のうち、少なくともいずれか一つを制御するものである。つまり、物体B(例えば先々行車)の位置および速度等に関する情報が、制御手段8に出力され、車両の各種制御に用いられる。
【0042】
ステップS4においては、物体が自車2から最も近い物体(例えば先行車)の向こう側にあるものの、自車2の走行の障害となり得る物体(例えば先々行車)ではないことを前提とした、物体の認識処理が行われる。例えば、自車2に対する物体の上下方向角度θ、自車2からの距離、自車2との相対速度等の情報に基づいて、物体が何であるかが認識される。図2に示される例では、物体6Bが行き先案内看板であることが認識される。また、物体5と物体6Aの相対距離が一定時間に亘って変化しない場合には、物体5と物体6Aは一体であると判断され、例えば物体5と物体6Aとで1台のトラックが構成されていると認識される。その後、物体の認識情報が、制御手段に出力され(ステップS6)、処理が終了する。以上が、第1実施形態に係る物体検出装置1の動作である。
【0043】
第1実施形態によれば、上下方向角度θが予め定められた条件を満たす場合、物体認識手段4は、他の物体5,6Aのうち条件を満たす物体6Aが自車2から最も近い物体5の向こう側に自車2の走行の障害となり得る物体(例えば先々行車)として存在すると判断する。つまり、上下方向においてレーダ波が到来する方向を検出して、物体の存在を認識するので、自車2から最も近い物体5(例えば先行車)の向こう側にあって自車2の走行の障害となり得る物体6A(例えば先々行車)の存在を正確に検出することができる。
【0044】
(第2実施形態)
本発明に係る第2実施形態について、図面を参照しつつ説明する。図6は、第2実施形態を説明するための図であり、図2に示す反射波R2を用いて他の物体の高さを算出する過程を示す図である。なお、第1実施形態と同様の構成については、同じ参照符号を付してその説明を省略する。
【0045】
上記第1実施形態では、上記予め定められた条件は、他の物体の上下方向角度θが斜め下向きの角度であることであった。第2実施形態では、この条件に代えて以下の条件を採用する。すなわち、第2実施形態における予め定められた条件は、自車2に対する他の物体の上下方向角度θ(図6参照)と、自車2から他の物体の虚像までの距離L(他の物体までの距離に略等しい)と、を用いて算出した当該他の物体の虚像の上下方向位置が路面12より低い位置であることである。この条件を満たすかどうかは、例えば以下の式1に基づいて判定することができる。なお、上記の説明では、虚像までの距離、虚像の上下方向位置という表現をしたが、レーダ情報取得手段3から見れば、これらが実像或いは虚像のいずれまでの距離、いずれの上下方向位置なのかどうかは分からない。
【0046】
H=L×sinθ+h<0 ・・・(式1)
【0047】
ここで、各文字の意味は、図6に示されるように、H:他の物体の路面12からの高さ、L:自車2のレーダ装置から他の物体までの距離、h:路面12から自車2のレーダ装置までの高さである。上下方向角度θについては、路面12と平行な方向を基準として、下向きの角度である場合にはθは負(θ<0)、上向きの角度である場合にはθは正(θ>0)、路面と平行の向きである場合にはθはゼロ(θ=0)である。
【0048】
図2、図4に示されるように、物体6Aについては、θは負である。よって、L×sinθの値も負となる。物体6Aについては、L×sinθの絶対値がhよりも大きいので、L×sinθ+h<0の関係が満たされる。従って、物体6Aは、自車2から最も近い物体5(例えば先行車)の向こう側に位置して自車2の走行の障害となり得る物体(例えば先々行車)であると判断される。
【0049】
一方、他の物体が行き先案内看板や、トラックのキャブである場合には、上下方向角度θが正となるので、必然的にL×sinθ+h>0となり、上記式1の関係は満たされない。よって、物体6B等は、自車2の走行の障害となり得る物体であるとは判断されず、先々行車であるとは判断されない。
【0050】
なお、本実施形態における予め定められた条件は、上記した式1に限定されない。例えば、Lの値が大きく、hを考慮する必要がない場合には、以下の式2に変更することも可能である。
【0051】
H=L×sinθ<0 ・・・(式2)
【0052】
第2実施形態においても、上記第1実施形態と同様の効果を奏することができる。
【0053】
(第3実施形態)
本発明の第3実施形態について、図面を参照しつつ説明する。図7は、第3実施形態に係る物体検出装置を示すブロック図である。図8は、第3実施形態に係る物体検出装置によって先々行車が検出される様子を示す側面図である。図9は、第3実施形態において、自車から先行車および先々行車を見た様子を示す図である。なお、第1実施形態と同様の構成については、第1実施形態と同様の符号を付して、その説明を省略する。
【0054】
第3実施形態は、図8,9に示されるように、先行車が二輪車で、先々行車が四輪自動車である場合を想定している。図10は、先行車(二輪車)で反射されて自車2に到来したレーダ波の反射波の受信レベルと、先々行車(四輪自動車)で反射されて自車2に到来したレーダ波の反射波の受信レベルを、自車2からの距離とともに示す図である。図10に示されるように、自車2から先行車までの距離が自車から先々行車までの距離よりある程度近くても、先々行車から到来した反射波の受信レベル(強度)の方が先行車から到来した反射波の受信レベル(強度)よりも高い。第3実施形態は、この点に鑑みてなされた発明である。以下、具体的に説明する。
【0055】
以下、自車2の周囲に存在する物体が、物体5A,6A,6Bである場合を例にとって説明する。第1実施形態では、先行車である物体5が四輪自動車である場合を例にとって説明したが、本実施形態では、先行車である物体5Aは、二輪車である。二輪車には、オートバイの他、自転車も含まれる。
【0056】
なお、本実施形態は、先々行車に相当する物体を正確に検出する点に特徴があるので、先々行車に相当する物体の検出について重点的に説明する。
【0057】
第3実施形態においては、レーダ情報取得手段3に代えてレーダ情報取得装置30、物体認識手段4に代えて物体認識手段40が設けられており、その他の構成は第1実施形態と同様である。
【0058】
第3実施形態において、レーダ情報取得手段30は、レーダ情報取得手段3が有する上記の機能に加えて、物体から到来したレーダ波(反射波)の受信強度を取得する。
【0059】
図7に示されるように、物体認識手段40は、物体認識手段4が有する機能に加えて、以下の機能を有している。すなわち、物体認識手段40は、レーダ情報取得手段30が取得したレーダ情報のうち、上記した反射波の受信強度等に基づいて、以下のようにして物体を認識する。
【0060】
レーダ情報取得手段30が、左右方向が同一で自車2からの距離が異なる複数のレーダ情報を取得し、かつ、当該複数のレーダ情報の受信強度のうち自車2から最も近い物体の受信強度P1と最も近い物体以外の他の物体の受信強度Pnとが、以下の(式2)の関係を満たす場合、物体認識手段40は、受信強度P1の物体の向こう側に、自車2の走行の障害となり得る物体として受信強度P1の物体よりも大きな受信強度Pnの物体が存在すると判断する。
【0061】
P1<Pn ・・・(式3)
【0062】
「自車2から最も近い物体5A」は、具体的には、例えば、先行車としての二輪車である。また、「自車2の向こう側に存在して自車2の走行の障害となり得る物体」とは、具体的には、例えば先々行車としての四輪自動車である。自車2から先々行車の全体が見える程度に先行車が左右方向に移動した場合、先々行車が自車2の走行の障害となり得るからである。
【0063】
上記したように、自車2から先行車(例えば二輪車)までの距離が自車2から先々行車(例えば四輪自動車)までの距離よりある程度近くても、先々行車から到来した反射波の受信レベルの方が、先行車から到来した反射波の受信レベルよりも高くなる。よって、上記式3の条件が満たされれば、物体認識手段40は、先行車として例えば二輪車が存在し、先々行車として例えば四輪自動車が存在することを認識することができる。
【0064】
次に、図11を用いて、自車2に搭載された物体検出装置1Aの動作について説明する。図11は、物体検出装置1Aの動作を示すフローチャートである。ここでは、図8,9に示される場面を想定する。なお、図11のフローチャートにおいて、ステップS1〜S2、S3〜S6については第1実施形態と同様なので、その説明を省略する。
【0065】
本実施形態では、ステップS3において、予め定められた条件(θ<0)が満たされる他の物体については、自車2から最も近い物体(例えば先行車としての四輪自動車)の向こう側にあって自車2の走行の障害となり得る物体(例えば先々行車としての四輪自動車)であると認識する(ステップS5)。一方、ステップS3において、予め定められた条件(θ<0)が満たされない他の物体(θ≧0)については、ステップS7に進む。
【0066】
ステップS7では、物体認識手段40は、レーダ情報取得手段30から、左右方向が同一で自車2からの距離が異なる複数の物体についての反射波の受信強度を取得する。
【0067】
次いで、ステップS8では、左右方向が同一で自車2からの距離が異なる複数の物体についての受信強度のうち自車2から最も近い物体の受信強度P1と当該最も近い物体以外の他の物体の受信強度Pnとが、P1<Pnの関係を満たすかどうかを判断する。この関係が満たされる場合、ステップS9に進む。図8,9に示される例では、物体6A(先々行車としての四輪自動車)と物体6B(行き先案内看板)がこの関係を満たす。
【0068】
ステップS9では、P1<Pnの関係を満たす物体の上下方向角度θが、予め定められた角度θuより小さい(θ<θu)かどうかが判断される。θuは、判断の対象となる物体が自車2の走行の障害となり得る物体となり得るかどうかの判断基準となる値である。
【0069】
ステップS9において、θ<θuの関係が満たされた場合、物体認識手段40は、受信強度P1の物体の向こう側に、自車2の走行の障害となり得る物体として受信強度P1の物体よりも大きな受信強度Pnの物体が存在すると判断する。図8,9に示される例では、受信強度P1の物体として先行車(例えば二輪車)が存在し、受信強度Pnの物体として先々行車(例えば四輪自動車)が存在すると判断される。一方、ステップS9において、θ<θuの関係が満たされない場合(θ≧θu)、ステップS4に進む。ステップS4以降の処理については、第1実施形態と同様なので、その説明を省略する。以上が、物体検出装置1Aの動作である。
【0070】
第3実施形態においては、先行車が二輪車であることによって、先々行車で反射されたレーダ波のうち路面で反射されずに自車2に直接到来したレーダ波が自車2で受信された場合であっても、先々行車を確実に認識することができる。
【0071】
なお、上記各実施形態は、上記の例に限られず、以下のように変更することも可能である。例えば、検出対象の物体が遠方にある場合には、物体の左右方向が同一か否かの判別精度が低下する。そこで、自車2から検出対象物体まで距離が遠過ぎる場合には、認識の対象から除外してもよい。例えば、上記ステップS3において、上記した判断に加えて、さらに以下の式4、5の双方を満たすかどうかを判断し、式4、5の双方を満たす場合にのみステップS5に進むようにしてもよい。
【0072】
Ld1<L1<Lu1 ・・・(式4)
Ld2<L2−L1<Lu2 ・・・(式5)
【0073】
ここで、L1:自車2に対し自車2から最も近い物体(例えば先行車)までの距離、L2:自車2に対し自車2から最も近い物体以外の物体(例えば先々行車)までの距離、Ld1,Lu1,Ld2,Lu2:予め設定された閾値である。Ld1,Ld2は、例えば5〜10m、Lu1,Lu2は、例えば50〜100mに設定することができる。
【0074】
このようにすれば、複数の物体が検出され、少なくともいずれか一つの物体が遠方にある場合に、先々行車であるかどうかの認識対象から除外し、誤認識の可能性を低減することができる。
【0075】
また、制御手段8を、先行車と先々行車の間隔、または、自車2と先々行車の間隔の少なくともいずれか一方に応じて、アダプティブクルーズシステム(Adaptive Cruise Control)、プリクラッシュセーフティシステム(Pre-Crash Safety System)、またはアイドリングストップシステム(Idoling Stop System)のうち、少なくともいずれか一つを制御するものとしてもよい。これにより、各システムをより適切に制御することができる。
【0076】
また、位置情報検出部3,30を、上記の機能に加えて、さらに、自車2と先々行車の第1相対速度、または、自車2と先行車の第2相対速度の少なくともいずれか一方を取得するものとし、制御手段8を、第1相対速度または第2相対速度の少なくともいずれか一方に応じて、アダプティブクルーズシステム(Adaptive Cruise Control System)、プリクラッシュセーフティシステム(Pre-Crash Safety System)、またはアイドリングストップシステム(Idoling Stop System)のうち、少なくともいずれか一つを制御するものとしてもよい。これにより、各システムをより適切に制御することができる。
【産業上の利用可能性】
【0077】
本発明は、自車に対する先々行車を正確に検出することができる物体検出装置およびこの物体検出装置を備えた車両制御装置等に利用可能である。
【符号の説明】
【0078】
1、1A 物体検出装置
2 自車
3、30 レーダ情報取得手段
4、40 物体認識装置
5 自車から最も近い物体(先行車)
6A 他の物体(先々行車)
6B 他の物体(行き先案内看板)
7 白線
8 制御手段
9 ACC
10 PCS
11 ISS
θ 上下方向角度
H 他の物体の路面からの高さ
L 自車のレーダ装置から他の物体までの距離
h 路面から自車のレーダ装置までの高さ
【特許請求の範囲】
【請求項1】
自車周囲に存在する物体を検出する物体検出装置であって、
レーダ波の送出により、前記自車に対する前記物体の左右方向角度および上下方向角度、並びに前記自車から前記物体までの距離を含むレーダ情報を取得するレーダ情報取得手段と、
前記レーダ情報に基づいて物体を認識する物体認識手段とを備え、
前記レーダ情報取得手段によって左右方向が同一で前記自車からの距離が異なる複数の前記レーダ情報が取得され、かつ、当該複数のレーダ情報のうち前記自車から最も近い物体以外の他の物体の前記上下方向角度または当該角度に基づく上下方向位置が予め定められた条件を満たす場合、前記物体認識手段は、前記他の物体のうち前記条件を満たす物体が前記自車から最も近い物体の向こう側に前記自車の走行の障害となり得る物体として存在すると判断する、物体検出装置。
【請求項2】
前記条件は、前記他の物体の前記上下方向角度が斜め下向きの角度であることを特徴とする、請求項1に記載の物体検出装置。
【請求項3】
前記条件は、前記他の物体の前記上下方向角度と前記距離とを用いて算出した前記他の物体の上下方向位置が前記路面より低い位置であることを特徴とする、請求項1に記載の物体検出装置。
【請求項4】
前記レーダ情報取得手段は、前記物体から到来した前記レーダ波の反射波の受信強度を取得し、
前記レーダ情報取得手段が、左右方向が同一で前記自車からの距離が異なる複数の前記レーダ情報を取得し、かつ、当該複数のレーダ情報の受信強度のうち前記自車から最も近い物体の受信強度P1と最も近い物体以外の他の物体の受信強度Pnとが、以下の(式1)の関係を満たす場合、前記物体認識手段は、受信強度P1の物体の向こう側に、前記自車の走行の障害となり得る物体として受信強度P1の物体よりも大きな受信強度Pnの物体が存在すると判断することを特徴とする、請求項1に記載の物体検出装置。
P1<Pn ・・・(式1)
【請求項5】
前記物体認識手段は、前記自車から最も近い物体を先行車、前記他の物体を前記先行車に先行する先々行車であると認識することを特徴とする、請求項2または3に記載の物体検出装置。
【請求項6】
前記受信強度P1の物体が二輪車、前記受信強度Pnの物体が四輪自動車であることを特徴とする、請求項4に記載の物体検出装置。
【請求項7】
請求項5に記載の物体検出装置と、
前記先行車と前記先々行車の間隔、または、前記自車と前記先々行車の間隔の少なくともいずれか一方に応じて、アダプティブクルーズシステム(Adaptive Cruise Control)、プリクラッシュセーフティシステム(Pre-Crash Safety System)、またはアイドリングストップシステム(Idoling Stop System)のうち、少なくともいずれか一つを制御する制御手段とを備えた、車両制御装置。
【請求項8】
前記レーダ情報取得手段は、前記自車と前記先々行車の第1相対速度、または、前記自車と前記先行車の第2相対速度の少なくともいずれか一方を取得する、請求項5に記載の物体検出装置と、
前記第1相対速度または前記第2相対速度の少なくともいずれか一方に応じて、アダプティブクルーズシステム(Adaptive Cruise Control System)、プリクラッシュセーフティシステム(Pre-Crash Safety System)、またはアイドリングストップシステム(Idoling Stop System)のうち、少なくともいずれか一つを制御する制御手段とを備えた、車両制御装置。
【請求項1】
自車周囲に存在する物体を検出する物体検出装置であって、
レーダ波の送出により、前記自車に対する前記物体の左右方向角度および上下方向角度、並びに前記自車から前記物体までの距離を含むレーダ情報を取得するレーダ情報取得手段と、
前記レーダ情報に基づいて物体を認識する物体認識手段とを備え、
前記レーダ情報取得手段によって左右方向が同一で前記自車からの距離が異なる複数の前記レーダ情報が取得され、かつ、当該複数のレーダ情報のうち前記自車から最も近い物体以外の他の物体の前記上下方向角度または当該角度に基づく上下方向位置が予め定められた条件を満たす場合、前記物体認識手段は、前記他の物体のうち前記条件を満たす物体が前記自車から最も近い物体の向こう側に前記自車の走行の障害となり得る物体として存在すると判断する、物体検出装置。
【請求項2】
前記条件は、前記他の物体の前記上下方向角度が斜め下向きの角度であることを特徴とする、請求項1に記載の物体検出装置。
【請求項3】
前記条件は、前記他の物体の前記上下方向角度と前記距離とを用いて算出した前記他の物体の上下方向位置が前記路面より低い位置であることを特徴とする、請求項1に記載の物体検出装置。
【請求項4】
前記レーダ情報取得手段は、前記物体から到来した前記レーダ波の反射波の受信強度を取得し、
前記レーダ情報取得手段が、左右方向が同一で前記自車からの距離が異なる複数の前記レーダ情報を取得し、かつ、当該複数のレーダ情報の受信強度のうち前記自車から最も近い物体の受信強度P1と最も近い物体以外の他の物体の受信強度Pnとが、以下の(式1)の関係を満たす場合、前記物体認識手段は、受信強度P1の物体の向こう側に、前記自車の走行の障害となり得る物体として受信強度P1の物体よりも大きな受信強度Pnの物体が存在すると判断することを特徴とする、請求項1に記載の物体検出装置。
P1<Pn ・・・(式1)
【請求項5】
前記物体認識手段は、前記自車から最も近い物体を先行車、前記他の物体を前記先行車に先行する先々行車であると認識することを特徴とする、請求項2または3に記載の物体検出装置。
【請求項6】
前記受信強度P1の物体が二輪車、前記受信強度Pnの物体が四輪自動車であることを特徴とする、請求項4に記載の物体検出装置。
【請求項7】
請求項5に記載の物体検出装置と、
前記先行車と前記先々行車の間隔、または、前記自車と前記先々行車の間隔の少なくともいずれか一方に応じて、アダプティブクルーズシステム(Adaptive Cruise Control)、プリクラッシュセーフティシステム(Pre-Crash Safety System)、またはアイドリングストップシステム(Idoling Stop System)のうち、少なくともいずれか一つを制御する制御手段とを備えた、車両制御装置。
【請求項8】
前記レーダ情報取得手段は、前記自車と前記先々行車の第1相対速度、または、前記自車と前記先行車の第2相対速度の少なくともいずれか一方を取得する、請求項5に記載の物体検出装置と、
前記第1相対速度または前記第2相対速度の少なくともいずれか一方に応じて、アダプティブクルーズシステム(Adaptive Cruise Control System)、プリクラッシュセーフティシステム(Pre-Crash Safety System)、またはアイドリングストップシステム(Idoling Stop System)のうち、少なくともいずれか一つを制御する制御手段とを備えた、車両制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−61274(P2013−61274A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−200621(P2011−200621)
【出願日】平成23年9月14日(2011.9.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月14日(2011.9.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]