
物体検出装置
【課題】簡単な構成によって路面かあるいは路面上の物体かを判別する物体検出装置を提供することを課題とする。
【解決手段】路面上に存在する物体を検出する物体検出装置1であって、物体の位置を検出する位置検出手段10,21と、位置検出手段10,21で検出する際の少なくとも鉛直方向の検出角度を設定する検出角度設定手段24と、検出角度設定手段24によって設定された検出角度に変化させた前後で位置検出手段10,21によって所定時間間隔でそれぞれ検出された各位置の変化に基づいて路面か又は路面上の物体かを判定する判定手段25とを備えることを特徴とする。
【解決手段】路面上に存在する物体を検出する物体検出装置1であって、物体の位置を検出する位置検出手段10,21と、位置検出手段10,21で検出する際の少なくとも鉛直方向の検出角度を設定する検出角度設定手段24と、検出角度設定手段24によって設定された検出角度に変化させた前後で位置検出手段10,21によって所定時間間隔でそれぞれ検出された各位置の変化に基づいて路面か又は路面上の物体かを判定する判定手段25とを備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダを利用して物体を検出する物体検出装置に関する。
【背景技術】
【0002】
近年、衝突防止装置、車間制御装置などの運転支援装置が開発されている。これら運転支援装置では、自車の前方を走行する車両を検出することが重要となる。このような検出装置には、レーザレーダによって一定時間毎に走査しながらレーザ光を発光するとともに受光し、一定時間毎に検出した時系列の多数の検出点の位置データにおいて現時刻の検出点の位置データ群と前時刻の検出点の位置データ群とを距離や反射強度などによって対応付けを行い、対応付けられた現時刻の位置データと前時刻の位置データから前方車両の相対速度などを推定している。さらに、特許文献1に記載の障害物検出装置では、路面反射板や路面上方構造物を障害物として判断しないように、上方照射波と下方照射波が一部重なり合いを生じるようにレーザ光を上下にそれぞれ照射し、上方照射波と下方照射波の各反射強度からレーザ光が反射した物体の種類を判定する。
【特許文献1】特開2006−98220号公報
【特許文献2】特開2006−98221号公報
【特許文献3】特開2005−258941号公報
【特許文献4】特開平8−82679号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記のようにレーザレーダによる検出点の位置データの中には、前方車両などの障害物の他に、路面などの障害物でない位置データ(誤検出)を含んでいる場合がある。そのため、前方車両の検出精度が低下する。また、上記の障害物検出装置の場合、レーザ光として各走査方向について上方照射波と下方照射波の2本必要となり、この上下の照射波の各反射強度に基づいて判定を行うので、構成が複雑化する。
【0004】
そこで、本発明は、簡単な構成によって路面かあるいは路面上の物体かを判別する物体検出装置を提供することを課題とする。
【課題を解決するための手段】
【0005】
本発明に係る物体検出装置は、路面上に存在する物体を検出する物体検出装置であって、物体の位置を検出する位置検出手段と、位置検出手段で検出する際の少なくとも鉛直方向の検出角度を設定する検出角度設定手段と、検出角度設定手段によって設定された検出角度に変化させた前後で位置検出手段によって所定時間間隔でそれぞれ検出された各位置の変化に基づいて路面か又は路面上の物体かを判定する判定手段とを備えることを特徴とする。
【0006】
この物体検出装置では、位置検出手段により所定時間間隔で路面上の物体に対する各位置を検出し、時系列の位置データを取得する。路面上の物体は、路面上に存在する可能性のある様々な物体であり、例えば、車両、自動二輪車、自転車、歩行者、車両からの落下物、工事に関する物体である。特に、物体検出装置では、検出角度設定手段により位置検出手段で検出を行う際の少なくとも鉛直方向の検出角度を設定する。したがって、位置検出手段では、ある検出角度で検出を行った所定時間後に、検出角度設定手段で設定された検出角度になるように鉛直方向の検出方向を変化させて検出を行う。そして、物体検出装置では、判定手段により検出角度に変化させた前後の所定時間間隔でそれぞれ検出された各位置の変化に基づいて路面か又は路面上の物体かを判定する。路面上の物体は、所定の高さを有している。そのため、位置検出手段で鉛直方向の検出角度を変化させて検出を行った場合、その検出される所定時間間隔の各位置が大きくは変化しない。一方、路面は、ほぼ水平であり、鉛直方向(高さ方向)においては変化しないかあるいは殆ど変化しない(勾配のある路面でも、高さ位置の変化は位置検出手段の検出限界の所定距離先でも僅かに変化する程度である)。そのため、位置検出手段で鉛直方向の検出角度を変化させて検出を行った場合、その検出される所定時間間隔の各位置(特に、位置検出手段から奥行き方向の各位置)が大きく変化する。したがって、この位置の変化の違いから、路面かあるいは路面上の物体かを判別できる。このように、物体検出装置では、鉛直方向の検出角度を変えて位置検出を行い、その前後での位置の変化を判定することにより、簡単な構成によって路面かあるいは路面上の物体かを高精度に判別することができる。その結果、検出対象である物体を高精度に検出することができる。
【0007】
本発明の上記物体検出装置では、位置検出手段は、車両に搭載され、自車の所定時間間隔での位置の変化量を検出する位置変化量検出手段と、自車の所定時間間隔での姿勢の変化量を検出する姿勢変化量検出手段とを備え、検出角度設定手段は、位置検出手段によって検出された位置から位置変化量検出手段によって検出された自車の位置の変化量と姿勢変化量検出手段によって検出された自車の姿勢の変化量に基づいて所定時間後の位置を予想し、当該所定時間後の予想位置を鉛直方向に変化させた位置に基づいて検出角度を設定する構成としてもよい。
【0008】
この物体検出装置では、位置検出手段が車両に搭載されているので、この車両の位置や姿勢の変化に伴って位置検出手段の検出位置や検出方向が変化する。そこで、物体検出装置では、位置変化量検出手段により自車の所定時間間隔での位置の変化量を検出するとともに、姿勢変化量検出手段により自車の所定時間間隔での姿勢の変化量を検出する。そして、物体検出装置では、検出角度設定手段により、位置検出手段によって検出された位置から自車の位置の変化量と姿勢の変化量に基づいて所定時間後の位置を予想し、この予想位置を鉛直方向に変化させた位置に基づいて検出角度を設定する。このように、物体検出装置では、自車の移動に伴って位置検出手段自体も移動するので、その移動を考慮して検出角度を設定することにより、路面と物体とを判別するための適切な検出角度を設定できる。
【発明の効果】
【0009】
本発明は、鉛直方向の検出角度を変えて位置検出を行い、その前後での位置の変化を判定することにより、簡単な構成によって路面かあるいは路面上の物体かを高精度に判別することができ、検出対象である物体を高精度に検出することができる。
【発明を実施するための最良の形態】
【0010】
以下、図面を参照して、本発明に係る物体検出装置の実施の形態を説明する。
【0011】
本実施の形態では、本発明に係る物体検出装置を、車両に搭載される障害物検出装置に適用する。本実施の形態に係る障害物検出装置は、路面上に存在する障害物(例えば、車両)を検出し、検出した障害物情報を車間制御装置、衝突防止装置などの運転支援装置に提供する。なお、検出方向としては、前方とするが、側方、後方などの他の方向でもよい。また、本実施の形態では、自車の進行方向(前後方向)をx軸とし、幅方向(左右方向)をy軸とし、自車の高さ方向をz軸として、x軸とy軸で形成される面が水平面であり、x軸とz軸で形成される面が鉛直面である。
【0012】
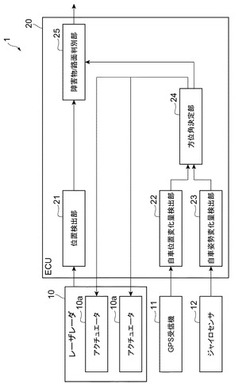
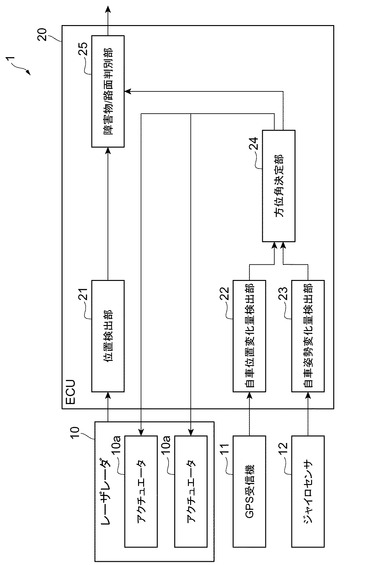
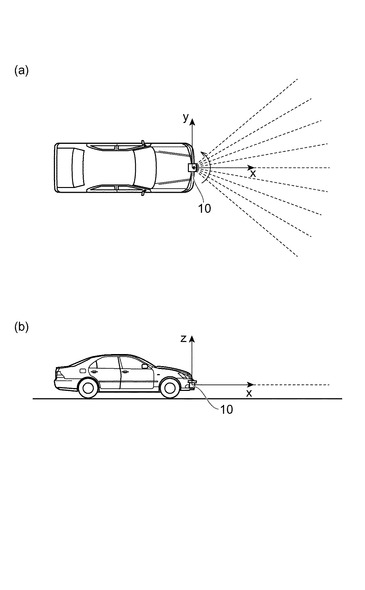
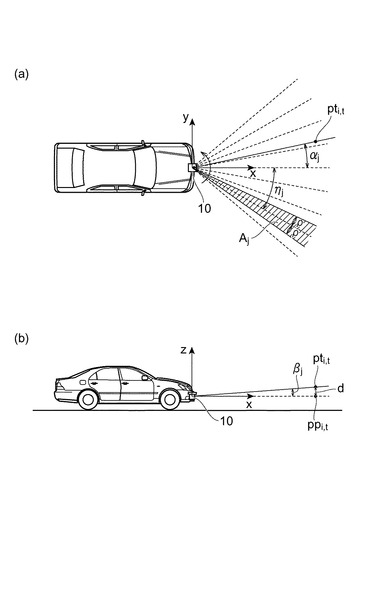
図1〜図3を参照して、本実施の形態に係る障害物検出装置1について説明する。図1は、本実施の形態に係る障害物検出装置の構成図である。図2は、図1のレーザレーダの走査方向を示す図であり、(a)が水平面であり、(b)が鉛直面である。図3は、図1の方位角決定部における処理の説明図であり、(a)が水平面であり、(b)が鉛直面である。
【0013】
障害物検出装置1は、レーザ光を利用したレーダによって所定時間毎に検出点のデータ(位置データなど)を取得し、前時刻の位置データ群と現時刻の位置データ群とを対応付けし、対応する位置データ(同じ障害物に対する前時刻の位置データと現時刻の位置データ)から障害物情報を求める。特に、障害物検出装置1では、検出点のデータが路面に対するものかあるいは障害物に対するものかを判別するために、前時刻で検出点を検出できた場合には現時刻において鉛直方向の走査方位角を変えてレーダ検出を行い、その前時刻の検出点の位置(実際には、自車の位置と姿勢の変化量を考慮した予想位置)と現時刻の検出点の位置との差に基づいて路面かあるいは障害物かを判別する。そのために、障害物検出装置1は、レーザレーダ10、GPS[Global Positioning System]受信機11、ジャイロセンサ12及びECU[Electronic Control Unit]20を備えている。
【0014】
レーザレーダ10は、レーザ光を利用して物体を検出する走査型のレーダである。レーザレーダ10は、自車の前端部の中央に取り付けられる。レーザレーダ10は、レーザ光の発光部と受光部を水平方向に回転させるアクチュエータ10a(モータなど)と鉛直方向に回転させるアクチュエータ10aを備えている。レーザレーダ10では、所定時間毎に、水平方向用のアクチュエータ10aによって発光部と受光部を水平方向に回転させるとともに必要に応じて鉛直方向用のアクチュエータ10aによって発光部と受光部を鉛直方向に回転させ、レーザ光を各走査方向で出射し、反射してきたレーザ光を受光する。そして、レーザレーダ10では、所定時間毎に、受光できた各反射点(検出点)についてのデータ(水平方向の走査方位角、鉛直方向の走査方位角、出射時刻、受光時刻、受光強度(反射強度)など)からなるレーダ信号をECU20に送信する。
【0015】
水平方向の走査方位角は、図2(a)に示すように、一定角度毎に基本角度が予め設定されている。鉛直方向の走査方位角は、図2(b)に示すように、基本角度(路面に対してレーザ光が平行となる角度)が予め設定されている。特に、ECU20の方位角決定部24で任意の走査について基本角度以外の方位角が決定された場合、水平方向と鉛直方向の各走査方位角は、その方位角決定部24で決定された各方位角が使用される。なお、図2では、破線によって、レーザ光の各走査方向を示している。
【0016】
水平方向と鉛直方向の各走査方位角については、アクチュエータ10aに設けられたロータリエンコーダなどで検出され、自車を基準とする場合にはレーザレーダ10の自車の取り付け位置や取り付け角度が加味される。レーザレーダ10での検出間隔である所定時間は、レーザレーザの性能、ECUの処理能力、障害物に対して必要とされる検出精度などを考慮して予め設定される。なお、走査方向を変化させる手段としては、アクチュエータ以外にも、光学素子などの他の手段でもよい。
【0017】
GPS受信機11は、GPSを利用して自車の現在位置などを推定するための装備である。GPS受信機11では、一定時間毎に、GPSアンテナによってGPS衛星からのGPS信号を受信し、そのGPS信号を復調し、その復調された各GPS衛星の位置データに基づいて自車の現在位置(緯度、経度、高度)などを算出する。そして、GPS受信機11では、自車の現在位置情報などをGPS検出信号としてECU20に送信する。なお、自車の現在位置を検出する手段としては、ナビゲーションシステムでの現在位置検出などの他の手段でもよい。また、GPS受信機では主にGPS信号の受信処理だけを行い、GPS信号に基づく現在位置の算出処理をECUで行ってもよい。
【0018】
ジャイロセンサ12は、自車の姿勢を検出するための三次元のジャイロセンサである。ジャイロセンサ12では、一定時間毎に、自車の旋回方向の角速度を検出するとともに鉛直方向の角速度を検出し、その検出した各角速度を積分して角度変化量を推定し、これらの角速度や角度変化量をジャイロ信号としてECU20に送信する。なお、自車の姿勢を検出する手段としては、他の手段でもよい。
【0019】
ECU20は、CPU[Central Processing Unit]、ROM[Read OnlyMemory]、RAM[Random Access Memory]などからなる電子制御ユニットであり、障害物検出装置1を統括制御する。ECU20では、ROMに記憶されている障害物検出装置1用のアプリケーションをRAMにロードしてCPUで実行することにより、位置検出部21、自車位置変化量検出部22、自車姿勢変化量検出部23、方位角決定部24、障害物/路面判別部25が構成される。ECU20では、レーザレーダ10からレーダ信号、GPS受信機11からGPS検出信号、ジャイロセンサ12からジャイロ信号を受信する。そして、ECU20では、各部21,22,23,24,25での処理を行い、障害物を検出できた場合にはその障害物の情報を障害物情報信号として運転支援装置に送信する。
【0020】
なお、本実施の形態では、レーザレーダ10及び位置検出部21が特許請求の範囲に記載する位置検出手段に相当し、GPS受信機11及び自車位置変化量検出部22が特許請求の範囲に記載する位置変化量検出手段に相当し、ジャイロセンサ12及び自車姿勢変化量検出部23が特許請求の範囲に記載する姿勢変化量検出手段に相当し、方位角決定部24が特許請求の範囲に記載する検出角設定手段に相当し、障害物/路面判別部25が特許請求の範囲に記載する判定手段に相当する。
【0021】
位置検出部21は、所定時間毎に、レーダ信号に含まれる各検出点の情報に基づいて、各検出点についての検出点データを生成する。そして、位置検出部21では、その生成した検出点データに検出時刻を対応付けて記憶する。検出点データとしては、方位ベクトルn、距離L、自車(レーザレーダ10)からの相対的な位置p(x,y,z)、反射強度などからなる。方位ベクトルnは、水平方向の走査方位角と鉛直方向の走査方位角に基づいて算出される。距離Lは、レーザ光の速度を出射時刻と受光時刻との時間差で除算して算出される。時刻t、i番目の走査での検出点の場合、式(1)で示す位置pi,tは、距離Li,tと式(2)で示す方位ベクトルni,tを用いて、式(3)により算出される。
【数1】

【0022】
自車位置変化量検出部22は、所定時間毎に、GPS検出信号に含まれる現在位置に基づいて、Δt秒の間に(前時刻t−1から現時刻tまでに)自車が移動した位置の変化量Dtを検出する。そして、自車位置変化量検出部22では、その検出した位置の変化量Dtに検出時刻を対応付けて記憶する。式(4)で示す現時刻tのときの自車の現在位置Ptと式(5)で示す前時刻t−1のときの自車の現在位置Pt−1が検出された場合、位置の変化量Dtは式(6)により算出される。
【数2】
【0023】
自車姿勢変化量検出部23は、所定時間毎に、ジャイロ信号に含まれる自車の旋回方向の角速度と鉛直方向の角速度に基づいて、式(7)で示すΔt秒の間に自車が変えた姿勢の変化量Δθtを検出する。そして、自車姿勢変化量検出部23では、その検出した姿勢の変化量Δθtに検出時刻を対応付けて記憶する。
【数3】
【0024】
方位角決定部24は、所定時間毎に、位置検出部21での前時刻t−1での検出点の位置pi,t−1、自車位置変化量検出部22での自車の位置の変化量Dt、自車姿勢変化量検出部23での自車の姿勢の変化量Δθtに基づいて、現時刻tでの特定の走査jについての水平方向の方位角αjと鉛直方向の方位角βjを決定する。ここで、方位角αj、βjが決定される特定の走査jは、判定領域Aj内に前時刻t−1で検出された検出点の位置pi,t−1のΔt秒後(現時刻t)の予想位置ppi,tを含む走査である。予想位置ppi,tは、前時刻t−1の検出点の位置pi,t−1の現時刻tでの予想位置であり、前時刻t−1の検出点の位置pi,t−1に対して自車のΔt秒の間の移動に伴う自車の位置と姿勢の変化量を加味した位置である。
【0025】
具体的には、方位角決定部24では、自車の位置の変化量Dtと自車の姿勢の変化量Δθtに基づいて、前時刻t−1での検出点i(走査i)の位置pi,t−1から現時刻tでの予想位置ppi,tを予想するための変換行列tTt−1を算出する。変換行列tTt−1は、式(8)に示すように、変換行列t−1Ttの逆行列である。時間間隔Δtが短くかつ姿勢の変化量Δθtが十分小さい場合、変換行列t−1Ttは、位置の変化量Dtと姿勢の変化量Δθtから求められる行列Rtを用いて、式(9)によって算出される。行列Rtは、式(10)によって算出される。式(10)の3つの行列Rx,t,Ry,t,Rz,tは、姿勢の変化量Δθtを用いて、式(11)、式(12)、式(13)からそれぞれ算出される。
【数4】
【0026】
方位角決定部24では、変換行列tTt−1を用いて、式(14)で示す前時刻t−1の検出点iの位置pi,t−1から式(15)で示す現時刻tの予想位置ppi,tを式(16)により算出する。
【数5】
【0027】
方位角決定部24では、現時刻tの走査j毎にかつ予想位置ppi,t毎に、走査jの判定領域Aj内に予想位置ppi,tを含むか否かを判定する。判定領域Ajは、図3(a)に示すように、水平面においてj番目の走査jの基本角度ηjに対して左右にそれぞれ一定角ρ分の領域を区切ることによって設定される。一定角ρは、隣接する走査方向間の水平方向の角度間隔を考慮して予め設定される。方位角決定部24では、予想位置ppi,tの水平方向の角度αを用いて、式(17)により判定領域Aj内に予想位置ppi,tを含むか否かを判定する。角度αは、予想位置ppi,tのx成分xpi,tとy成分ypi,tを用いて、式(18)によって算出される。
【数6】
【0028】
現時刻tの走査jの判定領域Aj内に予想位置ppi,tを複数含む場合、自車に近い障害物ほどその障害物に応じた運転支援を先に行う必要があるので、自車に最も近い障害物についての予想位置ppi,tを選択する。そのために、方位角決定部24では、現時刻tの各走査jの判定領域Aj内に含まれる予想位置ppi,t毎に、予想位置ppi,tの3つの成分を用いて、式(19)により判定基準E(ppi,t)を算出する。そして、方位角決定部24では、現時刻tの走査jの判定領域Aj内に含まれる複数の予想位置ppi,tの中から判定基準E(ppi,t)が最も小さくなる予想位置ppi,tを選択する。判定基準Eは、自車と予想位置ppi,t(障害物)との間の距離を判定するための指標であり、この値が小さいほど自車との距離が近い。
【数7】
【0029】
走査jの判定領域Aj内に予想位置ppi,t(障害物)が存在する場合(但し、複数の予想位置ppi,tが存在するときには1つだけ選択されている)、方位角決定部24では、図3(b)に示すように、予想位置ppi,tに対して変化高さd分高さを変化させた目標検出位置pti,tを算出する。ここでは、式(20)に示すように、予想位置ppi,tのz成分zi,tにdを加算して、目標検出位置pti,tが算出される。変化高さdは、検出対象の障害物の高さを考慮し、障害物の高さより小さい値が予め設定される。このように、レーザ検出における走査の高さ方向(鉛直方向の走査方位角)を変化させるのは、その走査の方向において、所定の高さを有する障害物かあるいは路面かを判別し、所定の高さを有する障害物が存在するか否かを判定し易くするためである。なお、変化高さdは、プラス方向に変化させるだけでなく、マイナス方向に変化させてもよい。また、変化高さdは、路面の勾配を考慮するとよい。例えば、変化高さd分加算する場合、上り勾配の場合にはその勾配が大きくなるほどdを大きくし、下り勾配の場合にはその勾配が大きくなるほどdを小さくする。
【数8】
【0030】
方位角決定部24では、図3に示すように、求めた目標検出位置pti,t毎に、目標検出位置pti,tに基づいて走査jについての水平方向の方位角αjと鉛直方向の方位角βjを算出する。ここでは、水平方向の方位角αjについては、目標検出位置pti,tのx成分xpi,tとy成分ypi,tを用いて、式(18)によって算出される。鉛直方向の方位角βj(水平面となす角)については、目標検出位置pti,tの3つの成分を用いて、式(21)によって算出される。
【数9】
【0031】
走査jの判定領域Aj内に予想位置ppi,t(障害物)が存在する場合、この求められた水平方向の方位角αjと鉛直方向の方位角βjが、走査jについての各方位角となる。一方、走査jの判定領域Aj内に予想位置ppi,tが存在しない場合、その走査jについての各方位角は、上記した基本角度となる。なお、走査方位を変化させるモータなどの反応速度が低い場合、鉛直方向の方位角βjについては、全走査のβjの平均値や最頻度を全走査のβjとする(つまり、方位角βjとしてそれぞれ異なる角度が求められても、ある1つの角度とする)。
【0032】
方位角決定部24では、判定領域Aj内に予想位置ppi,tが存在する走査jについて、決定した水平方向の方位角αjとなるように水平方向用のアクチュエータ10aを駆動制御するとともに、決定した鉛直方向の方位角βjとなるように鉛直方向用のアクチュエータ10aを駆動制御する。方位角決定部24では、判定領域Aj内に予想位置ppi,tが存在しない走査jについて、その走査jの水平方向の基本角度となるように水平方向用のアクチュエータ10aを駆動制御するとともに、鉛直方向の基本角度となるように鉛直方向用のアクチュエータ10aを駆動制御する。
【0033】
障害物/路面判別部25は、所定時間毎に、判定領域Aj内に予想位置ppi,tが存在する走査j毎に、位置検出部21での現時刻tの検出点(走査j)についての位置pj,tと予想位置ppi,tに基づいて、その検出点が障害物に対する検出点かあるいは路面に対する検出点かを判定する。なお、判定領域Aj内に予想位置ppi,tが存在しない走査jについては、障害物か路面かの判定を行わない。
【0034】
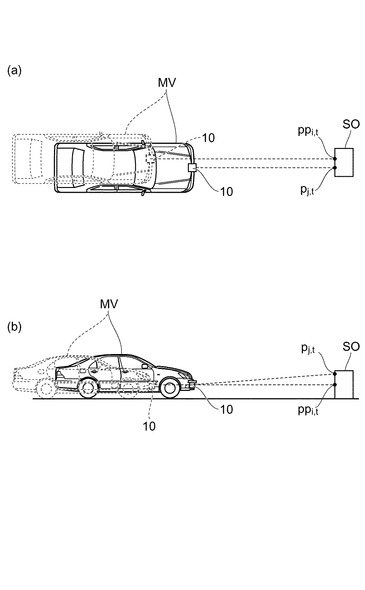
図4に示すように、車両からの落下物などの静止物体SOでレーザレーダ10からのレーザ光を反射している場合、予想位置ppi,tと検出点の位置pj,tとはほぼ同じ位置となる。つまり、予想位置ppi,tは自車MVのΔt秒間の移動に伴う各変化量が考慮されているので、障害物が静止物体SOの場合、予想位置ppi,tは、水平面においては実際の検出点の位置pj,tとほぼ一致する。
【0035】
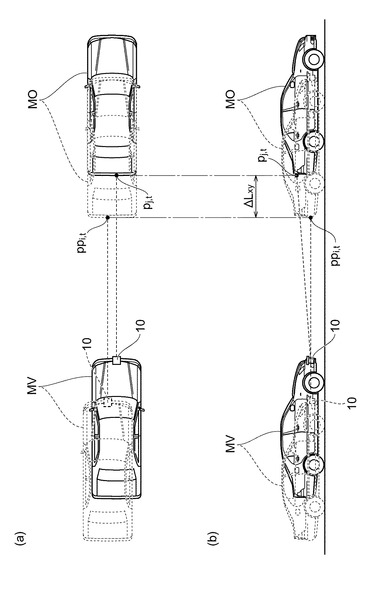
図5に示すように、前方車両などの移動物体MOでレーザレーダ10からのレーザ光を反射している場合、予想位置ppi,tと検出点の位置pj,tとは所定量離れた位置関係となる。つまり、移動物体MOの場合、予想位置ppi,tには自車MVに対する移動物体MOのΔt秒間の移動に伴う各変化量が考慮されていないので、予想位置ppi,tと実際の検出点の位置pj,tとの間には水平面においては差が発生する。この水平面における差ΔLxyは、自車MVに対する移動物体MOの相対速度をvとすると、式(22)によって求めることができる。
【数10】
【0036】
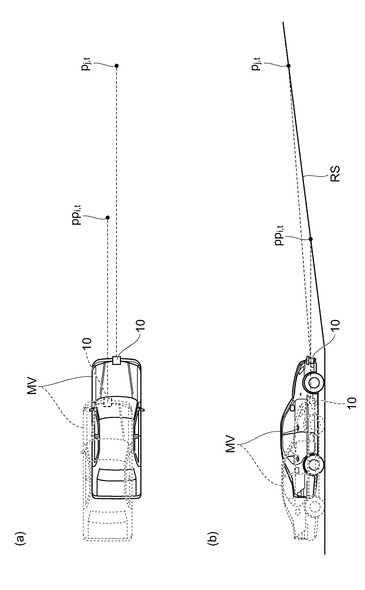
図6に示すように、路面RSでレーザレーダ10からのレーザ光を反射している場合、予想位置ppi,tと検出点の位置pj,tとは大きく離れた位置関係となる。路面RSは、車両に対してほぼ平行で水平面とみなせるので、レーザレーダ10の検出範囲内では高さ位置が殆ど変わらない(坂の場合でも多少変わる程度)。そのため、レーザレーダ10の鉛直方向の方位角を多少変えた程度でも、路面RSにおいてレーザレーダ10から奥行き方向の反射位置が大きく変化する。この路面RSの場合に発生する予想位置ppi,tと実際の検出点の位置pj,tとの水平面での距離差は、移動物体MOの場合に発生する予想位置ppi,tと位置pj,tとの水平面での距離差に比べても非常に大きなものとなる。
【0037】
障害物/路面判別部25では、式(23)で示すように、現時刻tの検出点の位置pj,tのx成分xj,t及びy成分yj,tと予想位置ppi,tのx成分xpi,t及びy成分ypi,tを用いて、位置pj,tと予想位置ppi,tの水平面での距離差を算出する。そして、障害物/路面判別部25では、式(23)で示すように、この算出した水平面での距離差が障害物の最大相対速度vmaxによるΔt秒間での移動距離以下か否かを判定する。最大相対速度vmaxは、車両の最高速度などを考慮して予め設定される。
【数11】
【0038】
検出点の位置pj,tと予想位置ppi,tとの水平面での距離差が障害物の最大相対速度vmaxによるΔt秒間での移動距離より大きい場合、障害物/路面判別部25では、その検出点は路面に対するものと判定する。この検出点からは、障害物についての情報を求めない。
【0039】
検出点の位置pj,tと予想位置ppi,tとの水平面での距離差が障害物の最大相対速度vmaxによるΔt秒間での移動距離以下の場合、障害物/路面判別部25では、その検出点は障害物に対するものと判定する。そして、障害物/路面判別部25では、その対応のとれた現時刻tの検出点の位置pj,tと前時刻t−1の検出点の位置pi,t−1(予想位置ppi,tを予想する際に用いた位置pi,t−1)から障害物の相対的な移動量、相対速度、さらに、絶対速度などを算出し、障害物の情報を検出する。
【0040】
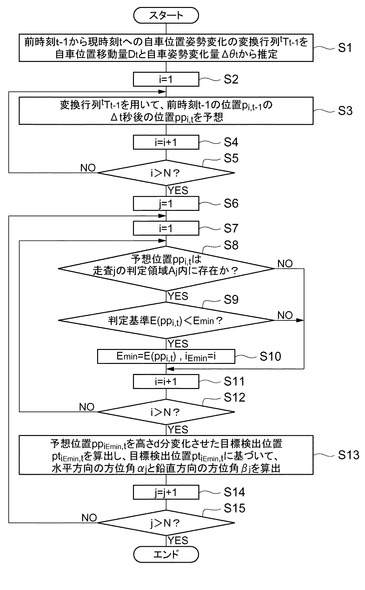
図1〜図3を参照して、障害物検出装置1における動作について説明する。特に、ECU20の方位角決定部24での処理について図7のフローチャートに沿って説明する。図7は、図1の方位角決定部における処理の流れを示すフローチャートである。
【0041】
レーザレーダ10では、所定時間毎に、各アクチュエータ10a,10aによって調整される走査方向毎にレーザ光を出射するとともにその反射光を受光する。そして、レーザレーダ10では、受光できた各検出点についての情報をレーダ信号としてECU20に送信する。
【0042】
各時刻tでのレーダ信号を受信する毎に、ECU20では、レーダ信号に含まれる各検出点の情報から、各走査iについての検出点データ(方位ベクトルni,t、距離Li,t、位置pi,t、反射強度など)をそれぞれ生成する。そして、ECU20では、その各走査iでの検出点データを各時刻tに対応付けて記憶する。
【0043】
GPS受信機11では、GPSアンテナによってGPS衛星からのGPS信号を受信し、各GPS信号に基づいて自車の現在位置(緯度、経度、高度)などを算出する。そして、GPS受信機11では、自車の現在位置情報などをGPS検出信号としてECU20に送信する。
【0044】
各時刻tでのGPS検出信号を受信すると、ECU20では、GPS検出信号に含まれる現在位置に基づいて、Δt秒の間に自車が移動した位置の変化量Dtを算出する。そして、自車位置変化量検出部22では、その算出した位置の変化量Dtに各時刻tを対応付けて記憶する。
【0045】
ジャイロセンサ12では、自車の旋回方向の角速度を検出するとともに鉛直方向の角速度を検出し、これら角速度から角度変化量を推定する。そして、ジャイロセンサ12では、それら各情報をジャイロ信号としてECU20に送信する。
【0046】
各時刻tでのジャイロ信号を受信すると、ECU20では、ジャイロ信号に含まれる自車の旋回方向の角速度と鉛直方向の角速度に基づいて、Δt秒の間に自車が変化した姿勢の変化量Δθtを算出する。そして、自車姿勢変化量検出部23では、その算出した姿勢の変化量Δθtに各時刻tを対応付けて記憶する。
【0047】
前時刻t−1から現時刻tまでの自車の位置の変化量Dtと姿勢の変化量Δθtを算出すると、ECU20では、その位置の変化量Dtと姿勢の変化量Δθtに基づいて、前時刻t−1から現時刻tへの自車位置姿勢変化の変換行列tTt−1を推定する(S1)。また、ECU20では、ループ処理用の変数iを1で初期化する(S2)。前時刻t−1の全ての走査(N個)(特に、検出点が検出されたもの)について、以下の処理をそれぞれ行う。但し、各走査iでは、レーザ光の反射光を受信できた場合には1つの検出点データがあるが、レーザ光の反射光を受光できなかった場合には検出点データがない。
【0048】
ECU20では、変換行列tTt−1を用いて、走査iでの前時刻t−1の検出点の位置pi,t−1のΔt秒後の予想位置ppi,tを算出する(S3)。検出点データがない走査iについては、このS3の処理は行われない。そして、ECU20では、変数iに1を加算する(S4)。さらに、ECU20では、変数iがNを超えたか否かを判定する(S5)。S5にて変数iがN以下と判定した場合、ECU20では、S3に戻って、次の走査iについての処理を行う。
【0049】
S5にて変数iがNを超えたと判定した場合、ECU20では、ループ処理用の変数jを1で初期化する(S6)。現時刻tの全ての走査(N個)について、以下の処理をそれぞれ行う。
【0050】
さらに、ECU20では、ループ処理用の変数iを1で初期化するとともに、閾値Eminを初期化する(S7)。前時刻t−1の全ての走査(N個)(特に、予想位置ppi,tが算出されたもの)について、以下の処理をそれぞれ行う。但し、各走査iでは、レーザ光の反射光を受信できた場合には検出点データがあるので、予想位置ppi,tが1つ算出されているが、レーザ光の反射光を受光できなかった場合には検出点データがないので、予想位置ppi,tが算出されていない。なお、閾値Eminの初期値は、レーザレーダ10の検知範囲などを考慮して予め設定される。
【0051】
ECU20では、予想位置ppi,tが走査jの判定領域Aj内に存在するか否かを判定する(S8)。S8にて予想位置ppi,tが走査jの判定領域Aj内に存在すると判定した場合、ECU20では、その予想位置ppi,tについての判定基準E(ppi,t)を算出し、判定基準E(ppi,t)が閾値Eminより小さいか否かを判定する(S9)。S9にて判定基準E(ppi,t)が閾値Eminより小さいと判定した場合、この時点において予想位置ppi,tが走査jの判定領域Aj内に存在しかつ自車に最も近い位置なので、ECU20では、閾値EminにE(ppi,t)を設定するとともに、iEmin=iを設定する(S10)。一方、S8にて予想位置ppi,tが走査jの判定領域Aj内に存在しないと判定した場合又はS9にて判定基準E(ppi,t)が閾値Emin以上と判定した場合、S10の処理は行われない。また、予想位置ppi,tが算出されていない走査iについては、S8、S9、S10の処理は行われない。そして、ECU20では、変数iに1を加算する(S11)。さらに、ECU20では、変数iがNを超えたか否かを判定する(S12)。S12にて変数iがN以下と判定した場合、ECU20では、S8に戻って、次の走査iについての処理を行う。
【0052】
S12にて変数iがNを超えたと判定した場合、ECU20では、走査jの判定領域Aj内に存在しかつ自車に最も近い位置の予想位置ppiEmin,tに対して変化高さd分変化させた目標検出位置ptiEmin,tを算出し、この目標検出位置ptiEmin,tに基づいて走査jの水平方向の方位角αjと鉛直方向の方位角βjを算出する(S13)。但し、走査jの判定領域Aj内に存在する予想位置ppiEmin,tが存在しない場合、このS13の処理は行われないので、その走査jの水平方向の方位角αjと鉛直方向の方位角βjは基本角度となる。
【0053】
走査jについての水平方向の方位角αjと鉛直方向の方位角βjが決定する毎に、ECU20では、その水平方向の方位角αjとなるように水平方向用のアクチュエータ10aを駆動制御するとともに、その鉛直方向の方位角βjとなるように鉛直方向用のアクチュエータ10aを駆動制御する。これによって、レーザレーダ10では、走査jの水平方向の方位角がαjとなるように水平方向用のアクチュエータ10aによって発光部と受光部が回転するとともに走査jの鉛直方向の方位角がβjになるように鉛直方向用のアクチュエータ10aによって発光部と受光部が回転し、その走査方位でレーザ光を出射するとともにその反射光を受光する。この際、前時刻t−1の検出点の位置pi,t−1から求められた予想位置ppiEmin,tが判定領域Aj内に存在する走査jでは、走査方位が基本角度(特に、鉛直方向)から変更されている。
【0054】
ECU20では、変数jに1を加算する(S14)。さらに、ECU20では、変数jがNを超えたか否かを判定する(S15)。S15にて変数jがN以下と判定した場合、ECU20では、S7に戻って、次の走査jについての処理を行う。
【0055】
S15にて変数jがNを超えたと判定した場合、現時刻tの全ての走査jについて水平方向の方位角αjと鉛直方向の方位角βjが決定された。そして、レーザレーダ10では、現時刻tでの全ての走査jについての検出が行われ、現時刻tのレーダ信号をECU20に送信する。
【0056】
現時刻tでのレーダ信号を受信し、各走査jについての検出点データ(方位ベクトルnj,t、距離Lj,t、位置pj,t、反射強度など)をそれぞれ生成すると、ECU20では、走査j毎に、現時刻tの検出点の位置pj,tと予想位置ppiEmin,tに基づいて位置pj,tと予想位置ppiEmin,tの水平面での距離差を算出し、この算出した距離差が障害物の最大相対速度vmaxによるΔt秒間での移動距離以下か否かを判定する。走査jの判定領域Aj内に予想位置ppiEmin,tが存在しなかった場合、判定対象が存在しないので、この判定は行われない。
【0057】
水平面での距離差が障害物の最大相対速度vmaxによるΔt秒間での移動距離より大きいと判定した場合、ECU20では、その検出点は路面に対するものと判定する。したがって、この検出点からは、障害物についての情報が求められない。
【0058】
水平面での距離差が障害物の最大相対速度vmaxによるΔt秒間での移動距離以下と判定した場合、ECU20では、その検出点は障害物に対するものと判定し、その対応のとれた現時刻tの検出点の位置pj,tと前時刻t−1の検出点の位置piEin,t−1から障害物の相対的な移動量、相対速度、さらに、絶対速度などを算出し、障害物の情報を検出する。
【0059】
そして、ECU20では、検出できた全ての障害物についての情報を障害物情報信号として運転支援装置に送信する。
【0060】
この障害物検出装置1によれば、走査の判定領域内に予想位置(前時刻の検出点の位置から予想された位置)が存在する場合には現時刻においてその走査については鉛直方向の方位角を変えて検出を行い、その予測位置と現時刻の検出点の位置との水平面での距離差を判定することにより、路面かあるいは路面上の障害物かを高精度に判別することができ、障害物を高精度に検出することができる。さらに、障害物検出装置1では、路面と障害物とを判別するために、各走査において走査方位角を変えるだけで1本のレーザ光だけで構成できるので、構成が複雑化しない。
【0061】
特に、障害物検出装置1では、前時刻での検出点の位置に対して自車の位置と姿勢の変化量を考慮して現時刻の予想位置を求め、この予想位置の高さを変化させた目標検出位置に基づいて走査の各方位角を決定することにより、路面と障害物とを判別するための適切な方位角を求めることができる。また、障害物検出装置1では、現時刻の予測位置と現時刻の検出点の位置との水平面での距離差で判定を行うことにより、現時刻の予測位置によって前時刻の検出点の位置に対して自車の移動分が予め考慮されているので、判定式が簡単となり、演算量を削減できる。
【0062】
以上、本発明に係る実施の形態について説明したが、本発明は上記実施の形態に限定されることなく様々な形態で実施される。
【0063】
例えば、本実施の形態では車両に搭載される障害物検出装置に適用したが、衝突防止装置、車間制御装置などの運転支援装置や周辺監視装置などの他の装置にも適用可能である。また、検出対象としては、車両以外にも、自動二輪車、自転車、人、落下物などの他の物体でもよい。
【0064】
また、本実施の形態では位置検出手段としてレーザレーダを用いる構成としたが、ミリ波レーダなどの他のレーダ検出手段を用いてもよい。
【0065】
また、本実施の形態では現時刻のデータと前時刻のデータとの対応付けを行う構成としたが、前々時刻のデータなどの更に過去のデータとの対応付けも行う構成としてもよい。
【0066】
また、本実施の形態では前時刻の検出点の位置から現時刻の予想位置を求め、この予想位置に基づいて現時刻の走査方位角を求める構成としたが、前時刻の検出点の位置などに基づいて現時刻の走査方位角を求めるようにしてもよい。
【0067】
また、本実施の形態では現時刻の予想位置と現時刻での検出点の位置に基づいて路面かあるいは障害物かを判定する構成としたが、前時刻の検出点の位置と現時刻での検出点の位置などに基づいて路面かあるいは障害物かを判定するようにしてもよい。
【0068】
また、本実施の形態では判定領域内に予想位置が存在する場合にはその走査についての方位角を決定する構成としたが、通常、検出対象の障害物はレーダの分解能に対して十分に大きいので、各検出時刻における検出点の位置データを位置の近さや反射強度などに基づいてグルーピングし、グループ毎に鉛直方向の方位角を決定するようにしてもよい。このような処理を行うことにより、演算量を削減できる。
【図面の簡単な説明】
【0069】
【図1】本実施の形態に係る障害物検出装置の構成図である。
【図2】図1のレーザレーダの走査方向を示す図であり、(a)が水平面であり、(b)が鉛直面である。
【図3】図1の方位角決定部における処理の説明図であり、(a)が水平面であり、(b)が鉛直面である。
【図4】図1の障害物検出装置によって静止物体を検出した場合の予想位置と検出位置の一例であり、(a)が水平面であり、(b)が鉛直面である。
【図5】図1の障害物検出装置によって前方車両を検出した場合の予想位置と検出位置の一例であり、(a)が水平面であり、(b)が鉛直面である。
【図6】図1の障害物検出装置によって路面を検出した場合の予想位置と検出位置の一例であり、(a)が水平面であり、(b)が鉛直面である。
【図7】図1の方位角決定部における処理の流れを示すフローチャートである。
【符号の説明】
【0070】
1…障害物検出装置、10…レーザレーダ、10a…アクチュエータ、11…GPS受信機、12…ジャイロセンサ、20…ECU、21…位置検出部、22…自車位置変化量検出部、23…自車姿勢変化量検出部、24…方位角決定部、25…障害物/路面判別部
【技術分野】
【0001】
本発明は、レーダを利用して物体を検出する物体検出装置に関する。
【背景技術】
【0002】
近年、衝突防止装置、車間制御装置などの運転支援装置が開発されている。これら運転支援装置では、自車の前方を走行する車両を検出することが重要となる。このような検出装置には、レーザレーダによって一定時間毎に走査しながらレーザ光を発光するとともに受光し、一定時間毎に検出した時系列の多数の検出点の位置データにおいて現時刻の検出点の位置データ群と前時刻の検出点の位置データ群とを距離や反射強度などによって対応付けを行い、対応付けられた現時刻の位置データと前時刻の位置データから前方車両の相対速度などを推定している。さらに、特許文献1に記載の障害物検出装置では、路面反射板や路面上方構造物を障害物として判断しないように、上方照射波と下方照射波が一部重なり合いを生じるようにレーザ光を上下にそれぞれ照射し、上方照射波と下方照射波の各反射強度からレーザ光が反射した物体の種類を判定する。
【特許文献1】特開2006−98220号公報
【特許文献2】特開2006−98221号公報
【特許文献3】特開2005−258941号公報
【特許文献4】特開平8−82679号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記のようにレーザレーダによる検出点の位置データの中には、前方車両などの障害物の他に、路面などの障害物でない位置データ(誤検出)を含んでいる場合がある。そのため、前方車両の検出精度が低下する。また、上記の障害物検出装置の場合、レーザ光として各走査方向について上方照射波と下方照射波の2本必要となり、この上下の照射波の各反射強度に基づいて判定を行うので、構成が複雑化する。
【0004】
そこで、本発明は、簡単な構成によって路面かあるいは路面上の物体かを判別する物体検出装置を提供することを課題とする。
【課題を解決するための手段】
【0005】
本発明に係る物体検出装置は、路面上に存在する物体を検出する物体検出装置であって、物体の位置を検出する位置検出手段と、位置検出手段で検出する際の少なくとも鉛直方向の検出角度を設定する検出角度設定手段と、検出角度設定手段によって設定された検出角度に変化させた前後で位置検出手段によって所定時間間隔でそれぞれ検出された各位置の変化に基づいて路面か又は路面上の物体かを判定する判定手段とを備えることを特徴とする。
【0006】
この物体検出装置では、位置検出手段により所定時間間隔で路面上の物体に対する各位置を検出し、時系列の位置データを取得する。路面上の物体は、路面上に存在する可能性のある様々な物体であり、例えば、車両、自動二輪車、自転車、歩行者、車両からの落下物、工事に関する物体である。特に、物体検出装置では、検出角度設定手段により位置検出手段で検出を行う際の少なくとも鉛直方向の検出角度を設定する。したがって、位置検出手段では、ある検出角度で検出を行った所定時間後に、検出角度設定手段で設定された検出角度になるように鉛直方向の検出方向を変化させて検出を行う。そして、物体検出装置では、判定手段により検出角度に変化させた前後の所定時間間隔でそれぞれ検出された各位置の変化に基づいて路面か又は路面上の物体かを判定する。路面上の物体は、所定の高さを有している。そのため、位置検出手段で鉛直方向の検出角度を変化させて検出を行った場合、その検出される所定時間間隔の各位置が大きくは変化しない。一方、路面は、ほぼ水平であり、鉛直方向(高さ方向)においては変化しないかあるいは殆ど変化しない(勾配のある路面でも、高さ位置の変化は位置検出手段の検出限界の所定距離先でも僅かに変化する程度である)。そのため、位置検出手段で鉛直方向の検出角度を変化させて検出を行った場合、その検出される所定時間間隔の各位置(特に、位置検出手段から奥行き方向の各位置)が大きく変化する。したがって、この位置の変化の違いから、路面かあるいは路面上の物体かを判別できる。このように、物体検出装置では、鉛直方向の検出角度を変えて位置検出を行い、その前後での位置の変化を判定することにより、簡単な構成によって路面かあるいは路面上の物体かを高精度に判別することができる。その結果、検出対象である物体を高精度に検出することができる。
【0007】
本発明の上記物体検出装置では、位置検出手段は、車両に搭載され、自車の所定時間間隔での位置の変化量を検出する位置変化量検出手段と、自車の所定時間間隔での姿勢の変化量を検出する姿勢変化量検出手段とを備え、検出角度設定手段は、位置検出手段によって検出された位置から位置変化量検出手段によって検出された自車の位置の変化量と姿勢変化量検出手段によって検出された自車の姿勢の変化量に基づいて所定時間後の位置を予想し、当該所定時間後の予想位置を鉛直方向に変化させた位置に基づいて検出角度を設定する構成としてもよい。
【0008】
この物体検出装置では、位置検出手段が車両に搭載されているので、この車両の位置や姿勢の変化に伴って位置検出手段の検出位置や検出方向が変化する。そこで、物体検出装置では、位置変化量検出手段により自車の所定時間間隔での位置の変化量を検出するとともに、姿勢変化量検出手段により自車の所定時間間隔での姿勢の変化量を検出する。そして、物体検出装置では、検出角度設定手段により、位置検出手段によって検出された位置から自車の位置の変化量と姿勢の変化量に基づいて所定時間後の位置を予想し、この予想位置を鉛直方向に変化させた位置に基づいて検出角度を設定する。このように、物体検出装置では、自車の移動に伴って位置検出手段自体も移動するので、その移動を考慮して検出角度を設定することにより、路面と物体とを判別するための適切な検出角度を設定できる。
【発明の効果】
【0009】
本発明は、鉛直方向の検出角度を変えて位置検出を行い、その前後での位置の変化を判定することにより、簡単な構成によって路面かあるいは路面上の物体かを高精度に判別することができ、検出対象である物体を高精度に検出することができる。
【発明を実施するための最良の形態】
【0010】
以下、図面を参照して、本発明に係る物体検出装置の実施の形態を説明する。
【0011】
本実施の形態では、本発明に係る物体検出装置を、車両に搭載される障害物検出装置に適用する。本実施の形態に係る障害物検出装置は、路面上に存在する障害物(例えば、車両)を検出し、検出した障害物情報を車間制御装置、衝突防止装置などの運転支援装置に提供する。なお、検出方向としては、前方とするが、側方、後方などの他の方向でもよい。また、本実施の形態では、自車の進行方向(前後方向)をx軸とし、幅方向(左右方向)をy軸とし、自車の高さ方向をz軸として、x軸とy軸で形成される面が水平面であり、x軸とz軸で形成される面が鉛直面である。
【0012】
図1〜図3を参照して、本実施の形態に係る障害物検出装置1について説明する。図1は、本実施の形態に係る障害物検出装置の構成図である。図2は、図1のレーザレーダの走査方向を示す図であり、(a)が水平面であり、(b)が鉛直面である。図3は、図1の方位角決定部における処理の説明図であり、(a)が水平面であり、(b)が鉛直面である。
【0013】
障害物検出装置1は、レーザ光を利用したレーダによって所定時間毎に検出点のデータ(位置データなど)を取得し、前時刻の位置データ群と現時刻の位置データ群とを対応付けし、対応する位置データ(同じ障害物に対する前時刻の位置データと現時刻の位置データ)から障害物情報を求める。特に、障害物検出装置1では、検出点のデータが路面に対するものかあるいは障害物に対するものかを判別するために、前時刻で検出点を検出できた場合には現時刻において鉛直方向の走査方位角を変えてレーダ検出を行い、その前時刻の検出点の位置(実際には、自車の位置と姿勢の変化量を考慮した予想位置)と現時刻の検出点の位置との差に基づいて路面かあるいは障害物かを判別する。そのために、障害物検出装置1は、レーザレーダ10、GPS[Global Positioning System]受信機11、ジャイロセンサ12及びECU[Electronic Control Unit]20を備えている。
【0014】
レーザレーダ10は、レーザ光を利用して物体を検出する走査型のレーダである。レーザレーダ10は、自車の前端部の中央に取り付けられる。レーザレーダ10は、レーザ光の発光部と受光部を水平方向に回転させるアクチュエータ10a(モータなど)と鉛直方向に回転させるアクチュエータ10aを備えている。レーザレーダ10では、所定時間毎に、水平方向用のアクチュエータ10aによって発光部と受光部を水平方向に回転させるとともに必要に応じて鉛直方向用のアクチュエータ10aによって発光部と受光部を鉛直方向に回転させ、レーザ光を各走査方向で出射し、反射してきたレーザ光を受光する。そして、レーザレーダ10では、所定時間毎に、受光できた各反射点(検出点)についてのデータ(水平方向の走査方位角、鉛直方向の走査方位角、出射時刻、受光時刻、受光強度(反射強度)など)からなるレーダ信号をECU20に送信する。
【0015】
水平方向の走査方位角は、図2(a)に示すように、一定角度毎に基本角度が予め設定されている。鉛直方向の走査方位角は、図2(b)に示すように、基本角度(路面に対してレーザ光が平行となる角度)が予め設定されている。特に、ECU20の方位角決定部24で任意の走査について基本角度以外の方位角が決定された場合、水平方向と鉛直方向の各走査方位角は、その方位角決定部24で決定された各方位角が使用される。なお、図2では、破線によって、レーザ光の各走査方向を示している。
【0016】
水平方向と鉛直方向の各走査方位角については、アクチュエータ10aに設けられたロータリエンコーダなどで検出され、自車を基準とする場合にはレーザレーダ10の自車の取り付け位置や取り付け角度が加味される。レーザレーダ10での検出間隔である所定時間は、レーザレーザの性能、ECUの処理能力、障害物に対して必要とされる検出精度などを考慮して予め設定される。なお、走査方向を変化させる手段としては、アクチュエータ以外にも、光学素子などの他の手段でもよい。
【0017】
GPS受信機11は、GPSを利用して自車の現在位置などを推定するための装備である。GPS受信機11では、一定時間毎に、GPSアンテナによってGPS衛星からのGPS信号を受信し、そのGPS信号を復調し、その復調された各GPS衛星の位置データに基づいて自車の現在位置(緯度、経度、高度)などを算出する。そして、GPS受信機11では、自車の現在位置情報などをGPS検出信号としてECU20に送信する。なお、自車の現在位置を検出する手段としては、ナビゲーションシステムでの現在位置検出などの他の手段でもよい。また、GPS受信機では主にGPS信号の受信処理だけを行い、GPS信号に基づく現在位置の算出処理をECUで行ってもよい。
【0018】
ジャイロセンサ12は、自車の姿勢を検出するための三次元のジャイロセンサである。ジャイロセンサ12では、一定時間毎に、自車の旋回方向の角速度を検出するとともに鉛直方向の角速度を検出し、その検出した各角速度を積分して角度変化量を推定し、これらの角速度や角度変化量をジャイロ信号としてECU20に送信する。なお、自車の姿勢を検出する手段としては、他の手段でもよい。
【0019】
ECU20は、CPU[Central Processing Unit]、ROM[Read OnlyMemory]、RAM[Random Access Memory]などからなる電子制御ユニットであり、障害物検出装置1を統括制御する。ECU20では、ROMに記憶されている障害物検出装置1用のアプリケーションをRAMにロードしてCPUで実行することにより、位置検出部21、自車位置変化量検出部22、自車姿勢変化量検出部23、方位角決定部24、障害物/路面判別部25が構成される。ECU20では、レーザレーダ10からレーダ信号、GPS受信機11からGPS検出信号、ジャイロセンサ12からジャイロ信号を受信する。そして、ECU20では、各部21,22,23,24,25での処理を行い、障害物を検出できた場合にはその障害物の情報を障害物情報信号として運転支援装置に送信する。
【0020】
なお、本実施の形態では、レーザレーダ10及び位置検出部21が特許請求の範囲に記載する位置検出手段に相当し、GPS受信機11及び自車位置変化量検出部22が特許請求の範囲に記載する位置変化量検出手段に相当し、ジャイロセンサ12及び自車姿勢変化量検出部23が特許請求の範囲に記載する姿勢変化量検出手段に相当し、方位角決定部24が特許請求の範囲に記載する検出角設定手段に相当し、障害物/路面判別部25が特許請求の範囲に記載する判定手段に相当する。
【0021】
位置検出部21は、所定時間毎に、レーダ信号に含まれる各検出点の情報に基づいて、各検出点についての検出点データを生成する。そして、位置検出部21では、その生成した検出点データに検出時刻を対応付けて記憶する。検出点データとしては、方位ベクトルn、距離L、自車(レーザレーダ10)からの相対的な位置p(x,y,z)、反射強度などからなる。方位ベクトルnは、水平方向の走査方位角と鉛直方向の走査方位角に基づいて算出される。距離Lは、レーザ光の速度を出射時刻と受光時刻との時間差で除算して算出される。時刻t、i番目の走査での検出点の場合、式(1)で示す位置pi,tは、距離Li,tと式(2)で示す方位ベクトルni,tを用いて、式(3)により算出される。
【数1】
【0022】
自車位置変化量検出部22は、所定時間毎に、GPS検出信号に含まれる現在位置に基づいて、Δt秒の間に(前時刻t−1から現時刻tまでに)自車が移動した位置の変化量Dtを検出する。そして、自車位置変化量検出部22では、その検出した位置の変化量Dtに検出時刻を対応付けて記憶する。式(4)で示す現時刻tのときの自車の現在位置Ptと式(5)で示す前時刻t−1のときの自車の現在位置Pt−1が検出された場合、位置の変化量Dtは式(6)により算出される。
【数2】
【0023】
自車姿勢変化量検出部23は、所定時間毎に、ジャイロ信号に含まれる自車の旋回方向の角速度と鉛直方向の角速度に基づいて、式(7)で示すΔt秒の間に自車が変えた姿勢の変化量Δθtを検出する。そして、自車姿勢変化量検出部23では、その検出した姿勢の変化量Δθtに検出時刻を対応付けて記憶する。
【数3】
【0024】
方位角決定部24は、所定時間毎に、位置検出部21での前時刻t−1での検出点の位置pi,t−1、自車位置変化量検出部22での自車の位置の変化量Dt、自車姿勢変化量検出部23での自車の姿勢の変化量Δθtに基づいて、現時刻tでの特定の走査jについての水平方向の方位角αjと鉛直方向の方位角βjを決定する。ここで、方位角αj、βjが決定される特定の走査jは、判定領域Aj内に前時刻t−1で検出された検出点の位置pi,t−1のΔt秒後(現時刻t)の予想位置ppi,tを含む走査である。予想位置ppi,tは、前時刻t−1の検出点の位置pi,t−1の現時刻tでの予想位置であり、前時刻t−1の検出点の位置pi,t−1に対して自車のΔt秒の間の移動に伴う自車の位置と姿勢の変化量を加味した位置である。
【0025】
具体的には、方位角決定部24では、自車の位置の変化量Dtと自車の姿勢の変化量Δθtに基づいて、前時刻t−1での検出点i(走査i)の位置pi,t−1から現時刻tでの予想位置ppi,tを予想するための変換行列tTt−1を算出する。変換行列tTt−1は、式(8)に示すように、変換行列t−1Ttの逆行列である。時間間隔Δtが短くかつ姿勢の変化量Δθtが十分小さい場合、変換行列t−1Ttは、位置の変化量Dtと姿勢の変化量Δθtから求められる行列Rtを用いて、式(9)によって算出される。行列Rtは、式(10)によって算出される。式(10)の3つの行列Rx,t,Ry,t,Rz,tは、姿勢の変化量Δθtを用いて、式(11)、式(12)、式(13)からそれぞれ算出される。
【数4】
【0026】
方位角決定部24では、変換行列tTt−1を用いて、式(14)で示す前時刻t−1の検出点iの位置pi,t−1から式(15)で示す現時刻tの予想位置ppi,tを式(16)により算出する。
【数5】
【0027】
方位角決定部24では、現時刻tの走査j毎にかつ予想位置ppi,t毎に、走査jの判定領域Aj内に予想位置ppi,tを含むか否かを判定する。判定領域Ajは、図3(a)に示すように、水平面においてj番目の走査jの基本角度ηjに対して左右にそれぞれ一定角ρ分の領域を区切ることによって設定される。一定角ρは、隣接する走査方向間の水平方向の角度間隔を考慮して予め設定される。方位角決定部24では、予想位置ppi,tの水平方向の角度αを用いて、式(17)により判定領域Aj内に予想位置ppi,tを含むか否かを判定する。角度αは、予想位置ppi,tのx成分xpi,tとy成分ypi,tを用いて、式(18)によって算出される。
【数6】
【0028】
現時刻tの走査jの判定領域Aj内に予想位置ppi,tを複数含む場合、自車に近い障害物ほどその障害物に応じた運転支援を先に行う必要があるので、自車に最も近い障害物についての予想位置ppi,tを選択する。そのために、方位角決定部24では、現時刻tの各走査jの判定領域Aj内に含まれる予想位置ppi,t毎に、予想位置ppi,tの3つの成分を用いて、式(19)により判定基準E(ppi,t)を算出する。そして、方位角決定部24では、現時刻tの走査jの判定領域Aj内に含まれる複数の予想位置ppi,tの中から判定基準E(ppi,t)が最も小さくなる予想位置ppi,tを選択する。判定基準Eは、自車と予想位置ppi,t(障害物)との間の距離を判定するための指標であり、この値が小さいほど自車との距離が近い。
【数7】
【0029】
走査jの判定領域Aj内に予想位置ppi,t(障害物)が存在する場合(但し、複数の予想位置ppi,tが存在するときには1つだけ選択されている)、方位角決定部24では、図3(b)に示すように、予想位置ppi,tに対して変化高さd分高さを変化させた目標検出位置pti,tを算出する。ここでは、式(20)に示すように、予想位置ppi,tのz成分zi,tにdを加算して、目標検出位置pti,tが算出される。変化高さdは、検出対象の障害物の高さを考慮し、障害物の高さより小さい値が予め設定される。このように、レーザ検出における走査の高さ方向(鉛直方向の走査方位角)を変化させるのは、その走査の方向において、所定の高さを有する障害物かあるいは路面かを判別し、所定の高さを有する障害物が存在するか否かを判定し易くするためである。なお、変化高さdは、プラス方向に変化させるだけでなく、マイナス方向に変化させてもよい。また、変化高さdは、路面の勾配を考慮するとよい。例えば、変化高さd分加算する場合、上り勾配の場合にはその勾配が大きくなるほどdを大きくし、下り勾配の場合にはその勾配が大きくなるほどdを小さくする。
【数8】
【0030】
方位角決定部24では、図3に示すように、求めた目標検出位置pti,t毎に、目標検出位置pti,tに基づいて走査jについての水平方向の方位角αjと鉛直方向の方位角βjを算出する。ここでは、水平方向の方位角αjについては、目標検出位置pti,tのx成分xpi,tとy成分ypi,tを用いて、式(18)によって算出される。鉛直方向の方位角βj(水平面となす角)については、目標検出位置pti,tの3つの成分を用いて、式(21)によって算出される。
【数9】
【0031】
走査jの判定領域Aj内に予想位置ppi,t(障害物)が存在する場合、この求められた水平方向の方位角αjと鉛直方向の方位角βjが、走査jについての各方位角となる。一方、走査jの判定領域Aj内に予想位置ppi,tが存在しない場合、その走査jについての各方位角は、上記した基本角度となる。なお、走査方位を変化させるモータなどの反応速度が低い場合、鉛直方向の方位角βjについては、全走査のβjの平均値や最頻度を全走査のβjとする(つまり、方位角βjとしてそれぞれ異なる角度が求められても、ある1つの角度とする)。
【0032】
方位角決定部24では、判定領域Aj内に予想位置ppi,tが存在する走査jについて、決定した水平方向の方位角αjとなるように水平方向用のアクチュエータ10aを駆動制御するとともに、決定した鉛直方向の方位角βjとなるように鉛直方向用のアクチュエータ10aを駆動制御する。方位角決定部24では、判定領域Aj内に予想位置ppi,tが存在しない走査jについて、その走査jの水平方向の基本角度となるように水平方向用のアクチュエータ10aを駆動制御するとともに、鉛直方向の基本角度となるように鉛直方向用のアクチュエータ10aを駆動制御する。
【0033】
障害物/路面判別部25は、所定時間毎に、判定領域Aj内に予想位置ppi,tが存在する走査j毎に、位置検出部21での現時刻tの検出点(走査j)についての位置pj,tと予想位置ppi,tに基づいて、その検出点が障害物に対する検出点かあるいは路面に対する検出点かを判定する。なお、判定領域Aj内に予想位置ppi,tが存在しない走査jについては、障害物か路面かの判定を行わない。
【0034】
図4に示すように、車両からの落下物などの静止物体SOでレーザレーダ10からのレーザ光を反射している場合、予想位置ppi,tと検出点の位置pj,tとはほぼ同じ位置となる。つまり、予想位置ppi,tは自車MVのΔt秒間の移動に伴う各変化量が考慮されているので、障害物が静止物体SOの場合、予想位置ppi,tは、水平面においては実際の検出点の位置pj,tとほぼ一致する。
【0035】
図5に示すように、前方車両などの移動物体MOでレーザレーダ10からのレーザ光を反射している場合、予想位置ppi,tと検出点の位置pj,tとは所定量離れた位置関係となる。つまり、移動物体MOの場合、予想位置ppi,tには自車MVに対する移動物体MOのΔt秒間の移動に伴う各変化量が考慮されていないので、予想位置ppi,tと実際の検出点の位置pj,tとの間には水平面においては差が発生する。この水平面における差ΔLxyは、自車MVに対する移動物体MOの相対速度をvとすると、式(22)によって求めることができる。
【数10】
【0036】
図6に示すように、路面RSでレーザレーダ10からのレーザ光を反射している場合、予想位置ppi,tと検出点の位置pj,tとは大きく離れた位置関係となる。路面RSは、車両に対してほぼ平行で水平面とみなせるので、レーザレーダ10の検出範囲内では高さ位置が殆ど変わらない(坂の場合でも多少変わる程度)。そのため、レーザレーダ10の鉛直方向の方位角を多少変えた程度でも、路面RSにおいてレーザレーダ10から奥行き方向の反射位置が大きく変化する。この路面RSの場合に発生する予想位置ppi,tと実際の検出点の位置pj,tとの水平面での距離差は、移動物体MOの場合に発生する予想位置ppi,tと位置pj,tとの水平面での距離差に比べても非常に大きなものとなる。
【0037】
障害物/路面判別部25では、式(23)で示すように、現時刻tの検出点の位置pj,tのx成分xj,t及びy成分yj,tと予想位置ppi,tのx成分xpi,t及びy成分ypi,tを用いて、位置pj,tと予想位置ppi,tの水平面での距離差を算出する。そして、障害物/路面判別部25では、式(23)で示すように、この算出した水平面での距離差が障害物の最大相対速度vmaxによるΔt秒間での移動距離以下か否かを判定する。最大相対速度vmaxは、車両の最高速度などを考慮して予め設定される。
【数11】
【0038】
検出点の位置pj,tと予想位置ppi,tとの水平面での距離差が障害物の最大相対速度vmaxによるΔt秒間での移動距離より大きい場合、障害物/路面判別部25では、その検出点は路面に対するものと判定する。この検出点からは、障害物についての情報を求めない。
【0039】
検出点の位置pj,tと予想位置ppi,tとの水平面での距離差が障害物の最大相対速度vmaxによるΔt秒間での移動距離以下の場合、障害物/路面判別部25では、その検出点は障害物に対するものと判定する。そして、障害物/路面判別部25では、その対応のとれた現時刻tの検出点の位置pj,tと前時刻t−1の検出点の位置pi,t−1(予想位置ppi,tを予想する際に用いた位置pi,t−1)から障害物の相対的な移動量、相対速度、さらに、絶対速度などを算出し、障害物の情報を検出する。
【0040】
図1〜図3を参照して、障害物検出装置1における動作について説明する。特に、ECU20の方位角決定部24での処理について図7のフローチャートに沿って説明する。図7は、図1の方位角決定部における処理の流れを示すフローチャートである。
【0041】
レーザレーダ10では、所定時間毎に、各アクチュエータ10a,10aによって調整される走査方向毎にレーザ光を出射するとともにその反射光を受光する。そして、レーザレーダ10では、受光できた各検出点についての情報をレーダ信号としてECU20に送信する。
【0042】
各時刻tでのレーダ信号を受信する毎に、ECU20では、レーダ信号に含まれる各検出点の情報から、各走査iについての検出点データ(方位ベクトルni,t、距離Li,t、位置pi,t、反射強度など)をそれぞれ生成する。そして、ECU20では、その各走査iでの検出点データを各時刻tに対応付けて記憶する。
【0043】
GPS受信機11では、GPSアンテナによってGPS衛星からのGPS信号を受信し、各GPS信号に基づいて自車の現在位置(緯度、経度、高度)などを算出する。そして、GPS受信機11では、自車の現在位置情報などをGPS検出信号としてECU20に送信する。
【0044】
各時刻tでのGPS検出信号を受信すると、ECU20では、GPS検出信号に含まれる現在位置に基づいて、Δt秒の間に自車が移動した位置の変化量Dtを算出する。そして、自車位置変化量検出部22では、その算出した位置の変化量Dtに各時刻tを対応付けて記憶する。
【0045】
ジャイロセンサ12では、自車の旋回方向の角速度を検出するとともに鉛直方向の角速度を検出し、これら角速度から角度変化量を推定する。そして、ジャイロセンサ12では、それら各情報をジャイロ信号としてECU20に送信する。
【0046】
各時刻tでのジャイロ信号を受信すると、ECU20では、ジャイロ信号に含まれる自車の旋回方向の角速度と鉛直方向の角速度に基づいて、Δt秒の間に自車が変化した姿勢の変化量Δθtを算出する。そして、自車姿勢変化量検出部23では、その算出した姿勢の変化量Δθtに各時刻tを対応付けて記憶する。
【0047】
前時刻t−1から現時刻tまでの自車の位置の変化量Dtと姿勢の変化量Δθtを算出すると、ECU20では、その位置の変化量Dtと姿勢の変化量Δθtに基づいて、前時刻t−1から現時刻tへの自車位置姿勢変化の変換行列tTt−1を推定する(S1)。また、ECU20では、ループ処理用の変数iを1で初期化する(S2)。前時刻t−1の全ての走査(N個)(特に、検出点が検出されたもの)について、以下の処理をそれぞれ行う。但し、各走査iでは、レーザ光の反射光を受信できた場合には1つの検出点データがあるが、レーザ光の反射光を受光できなかった場合には検出点データがない。
【0048】
ECU20では、変換行列tTt−1を用いて、走査iでの前時刻t−1の検出点の位置pi,t−1のΔt秒後の予想位置ppi,tを算出する(S3)。検出点データがない走査iについては、このS3の処理は行われない。そして、ECU20では、変数iに1を加算する(S4)。さらに、ECU20では、変数iがNを超えたか否かを判定する(S5)。S5にて変数iがN以下と判定した場合、ECU20では、S3に戻って、次の走査iについての処理を行う。
【0049】
S5にて変数iがNを超えたと判定した場合、ECU20では、ループ処理用の変数jを1で初期化する(S6)。現時刻tの全ての走査(N個)について、以下の処理をそれぞれ行う。
【0050】
さらに、ECU20では、ループ処理用の変数iを1で初期化するとともに、閾値Eminを初期化する(S7)。前時刻t−1の全ての走査(N個)(特に、予想位置ppi,tが算出されたもの)について、以下の処理をそれぞれ行う。但し、各走査iでは、レーザ光の反射光を受信できた場合には検出点データがあるので、予想位置ppi,tが1つ算出されているが、レーザ光の反射光を受光できなかった場合には検出点データがないので、予想位置ppi,tが算出されていない。なお、閾値Eminの初期値は、レーザレーダ10の検知範囲などを考慮して予め設定される。
【0051】
ECU20では、予想位置ppi,tが走査jの判定領域Aj内に存在するか否かを判定する(S8)。S8にて予想位置ppi,tが走査jの判定領域Aj内に存在すると判定した場合、ECU20では、その予想位置ppi,tについての判定基準E(ppi,t)を算出し、判定基準E(ppi,t)が閾値Eminより小さいか否かを判定する(S9)。S9にて判定基準E(ppi,t)が閾値Eminより小さいと判定した場合、この時点において予想位置ppi,tが走査jの判定領域Aj内に存在しかつ自車に最も近い位置なので、ECU20では、閾値EminにE(ppi,t)を設定するとともに、iEmin=iを設定する(S10)。一方、S8にて予想位置ppi,tが走査jの判定領域Aj内に存在しないと判定した場合又はS9にて判定基準E(ppi,t)が閾値Emin以上と判定した場合、S10の処理は行われない。また、予想位置ppi,tが算出されていない走査iについては、S8、S9、S10の処理は行われない。そして、ECU20では、変数iに1を加算する(S11)。さらに、ECU20では、変数iがNを超えたか否かを判定する(S12)。S12にて変数iがN以下と判定した場合、ECU20では、S8に戻って、次の走査iについての処理を行う。
【0052】
S12にて変数iがNを超えたと判定した場合、ECU20では、走査jの判定領域Aj内に存在しかつ自車に最も近い位置の予想位置ppiEmin,tに対して変化高さd分変化させた目標検出位置ptiEmin,tを算出し、この目標検出位置ptiEmin,tに基づいて走査jの水平方向の方位角αjと鉛直方向の方位角βjを算出する(S13)。但し、走査jの判定領域Aj内に存在する予想位置ppiEmin,tが存在しない場合、このS13の処理は行われないので、その走査jの水平方向の方位角αjと鉛直方向の方位角βjは基本角度となる。
【0053】
走査jについての水平方向の方位角αjと鉛直方向の方位角βjが決定する毎に、ECU20では、その水平方向の方位角αjとなるように水平方向用のアクチュエータ10aを駆動制御するとともに、その鉛直方向の方位角βjとなるように鉛直方向用のアクチュエータ10aを駆動制御する。これによって、レーザレーダ10では、走査jの水平方向の方位角がαjとなるように水平方向用のアクチュエータ10aによって発光部と受光部が回転するとともに走査jの鉛直方向の方位角がβjになるように鉛直方向用のアクチュエータ10aによって発光部と受光部が回転し、その走査方位でレーザ光を出射するとともにその反射光を受光する。この際、前時刻t−1の検出点の位置pi,t−1から求められた予想位置ppiEmin,tが判定領域Aj内に存在する走査jでは、走査方位が基本角度(特に、鉛直方向)から変更されている。
【0054】
ECU20では、変数jに1を加算する(S14)。さらに、ECU20では、変数jがNを超えたか否かを判定する(S15)。S15にて変数jがN以下と判定した場合、ECU20では、S7に戻って、次の走査jについての処理を行う。
【0055】
S15にて変数jがNを超えたと判定した場合、現時刻tの全ての走査jについて水平方向の方位角αjと鉛直方向の方位角βjが決定された。そして、レーザレーダ10では、現時刻tでの全ての走査jについての検出が行われ、現時刻tのレーダ信号をECU20に送信する。
【0056】
現時刻tでのレーダ信号を受信し、各走査jについての検出点データ(方位ベクトルnj,t、距離Lj,t、位置pj,t、反射強度など)をそれぞれ生成すると、ECU20では、走査j毎に、現時刻tの検出点の位置pj,tと予想位置ppiEmin,tに基づいて位置pj,tと予想位置ppiEmin,tの水平面での距離差を算出し、この算出した距離差が障害物の最大相対速度vmaxによるΔt秒間での移動距離以下か否かを判定する。走査jの判定領域Aj内に予想位置ppiEmin,tが存在しなかった場合、判定対象が存在しないので、この判定は行われない。
【0057】
水平面での距離差が障害物の最大相対速度vmaxによるΔt秒間での移動距離より大きいと判定した場合、ECU20では、その検出点は路面に対するものと判定する。したがって、この検出点からは、障害物についての情報が求められない。
【0058】
水平面での距離差が障害物の最大相対速度vmaxによるΔt秒間での移動距離以下と判定した場合、ECU20では、その検出点は障害物に対するものと判定し、その対応のとれた現時刻tの検出点の位置pj,tと前時刻t−1の検出点の位置piEin,t−1から障害物の相対的な移動量、相対速度、さらに、絶対速度などを算出し、障害物の情報を検出する。
【0059】
そして、ECU20では、検出できた全ての障害物についての情報を障害物情報信号として運転支援装置に送信する。
【0060】
この障害物検出装置1によれば、走査の判定領域内に予想位置(前時刻の検出点の位置から予想された位置)が存在する場合には現時刻においてその走査については鉛直方向の方位角を変えて検出を行い、その予測位置と現時刻の検出点の位置との水平面での距離差を判定することにより、路面かあるいは路面上の障害物かを高精度に判別することができ、障害物を高精度に検出することができる。さらに、障害物検出装置1では、路面と障害物とを判別するために、各走査において走査方位角を変えるだけで1本のレーザ光だけで構成できるので、構成が複雑化しない。
【0061】
特に、障害物検出装置1では、前時刻での検出点の位置に対して自車の位置と姿勢の変化量を考慮して現時刻の予想位置を求め、この予想位置の高さを変化させた目標検出位置に基づいて走査の各方位角を決定することにより、路面と障害物とを判別するための適切な方位角を求めることができる。また、障害物検出装置1では、現時刻の予測位置と現時刻の検出点の位置との水平面での距離差で判定を行うことにより、現時刻の予測位置によって前時刻の検出点の位置に対して自車の移動分が予め考慮されているので、判定式が簡単となり、演算量を削減できる。
【0062】
以上、本発明に係る実施の形態について説明したが、本発明は上記実施の形態に限定されることなく様々な形態で実施される。
【0063】
例えば、本実施の形態では車両に搭載される障害物検出装置に適用したが、衝突防止装置、車間制御装置などの運転支援装置や周辺監視装置などの他の装置にも適用可能である。また、検出対象としては、車両以外にも、自動二輪車、自転車、人、落下物などの他の物体でもよい。
【0064】
また、本実施の形態では位置検出手段としてレーザレーダを用いる構成としたが、ミリ波レーダなどの他のレーダ検出手段を用いてもよい。
【0065】
また、本実施の形態では現時刻のデータと前時刻のデータとの対応付けを行う構成としたが、前々時刻のデータなどの更に過去のデータとの対応付けも行う構成としてもよい。
【0066】
また、本実施の形態では前時刻の検出点の位置から現時刻の予想位置を求め、この予想位置に基づいて現時刻の走査方位角を求める構成としたが、前時刻の検出点の位置などに基づいて現時刻の走査方位角を求めるようにしてもよい。
【0067】
また、本実施の形態では現時刻の予想位置と現時刻での検出点の位置に基づいて路面かあるいは障害物かを判定する構成としたが、前時刻の検出点の位置と現時刻での検出点の位置などに基づいて路面かあるいは障害物かを判定するようにしてもよい。
【0068】
また、本実施の形態では判定領域内に予想位置が存在する場合にはその走査についての方位角を決定する構成としたが、通常、検出対象の障害物はレーダの分解能に対して十分に大きいので、各検出時刻における検出点の位置データを位置の近さや反射強度などに基づいてグルーピングし、グループ毎に鉛直方向の方位角を決定するようにしてもよい。このような処理を行うことにより、演算量を削減できる。
【図面の簡単な説明】
【0069】
【図1】本実施の形態に係る障害物検出装置の構成図である。
【図2】図1のレーザレーダの走査方向を示す図であり、(a)が水平面であり、(b)が鉛直面である。
【図3】図1の方位角決定部における処理の説明図であり、(a)が水平面であり、(b)が鉛直面である。
【図4】図1の障害物検出装置によって静止物体を検出した場合の予想位置と検出位置の一例であり、(a)が水平面であり、(b)が鉛直面である。
【図5】図1の障害物検出装置によって前方車両を検出した場合の予想位置と検出位置の一例であり、(a)が水平面であり、(b)が鉛直面である。
【図6】図1の障害物検出装置によって路面を検出した場合の予想位置と検出位置の一例であり、(a)が水平面であり、(b)が鉛直面である。
【図7】図1の方位角決定部における処理の流れを示すフローチャートである。
【符号の説明】
【0070】
1…障害物検出装置、10…レーザレーダ、10a…アクチュエータ、11…GPS受信機、12…ジャイロセンサ、20…ECU、21…位置検出部、22…自車位置変化量検出部、23…自車姿勢変化量検出部、24…方位角決定部、25…障害物/路面判別部
【特許請求の範囲】
【請求項1】
路面上に存在する物体を検出する物体検出装置であって、
物体の位置を検出する位置検出手段と、
前記位置検出手段で検出する際の少なくとも鉛直方向の検出角度を設定する検出角度設定手段と、
前記検出角度設定手段によって設定された検出角度に変化させた前後で前記位置検出手段によって所定時間間隔でそれぞれ検出された各位置の変化に基づいて路面か又は路面上の物体かを判定する判定手段と
を備えることを特徴とする物体検出装置。
【請求項2】
前記位置検出手段は、車両に搭載され、
自車の所定時間間隔での位置の変化量を検出する位置変化量検出手段と、
自車の所定時間間隔での姿勢の変化量を検出する姿勢変化量検出手段と
を備え、
前記検出角度設定手段は、前記位置検出手段によって検出された位置から前記位置変化量検出手段によって検出された自車の位置の変化量と前記姿勢変化量検出手段によって検出された自車の姿勢の変化量に基づいて所定時間後の位置を予想し、当該所定時間後の予想位置を鉛直方向に変化させた位置に基づいて検出角度を設定することを特徴とする請求項1に記載する物体検出装置。
【請求項1】
路面上に存在する物体を検出する物体検出装置であって、
物体の位置を検出する位置検出手段と、
前記位置検出手段で検出する際の少なくとも鉛直方向の検出角度を設定する検出角度設定手段と、
前記検出角度設定手段によって設定された検出角度に変化させた前後で前記位置検出手段によって所定時間間隔でそれぞれ検出された各位置の変化に基づいて路面か又は路面上の物体かを判定する判定手段と
を備えることを特徴とする物体検出装置。
【請求項2】
前記位置検出手段は、車両に搭載され、
自車の所定時間間隔での位置の変化量を検出する位置変化量検出手段と、
自車の所定時間間隔での姿勢の変化量を検出する姿勢変化量検出手段と
を備え、
前記検出角度設定手段は、前記位置検出手段によって検出された位置から前記位置変化量検出手段によって検出された自車の位置の変化量と前記姿勢変化量検出手段によって検出された自車の姿勢の変化量に基づいて所定時間後の位置を予想し、当該所定時間後の予想位置を鉛直方向に変化させた位置に基づいて検出角度を設定することを特徴とする請求項1に記載する物体検出装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−216464(P2009−216464A)
【公開日】平成21年9月24日(2009.9.24)
【国際特許分類】
【出願番号】特願2008−58388(P2008−58388)
【出願日】平成20年3月7日(2008.3.7)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成21年9月24日(2009.9.24)
【国際特許分類】
【出願日】平成20年3月7日(2008.3.7)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]