
物体検出装置
【課題】高さ方向における探査波の走査機構を不要にした簡単な構成で、路面標示や路面に埋め込まれた反射物等の路面設置物や、歩道橋や上方に設置された看板等の上方設置物と、自車両の走行を妨げる停止車両等の障害物と、を区別して検出することができる物体検出装置を提供する。
【解決手段】レーダ装置1は、物体10を、ある程度離れた距離で検出したときの反射光量を基準反射光量とする。また、物体10を検出する毎に、この物体を障害物であると仮定し、基準反射光量を用いて、今回算出した距離での反射光量を推定する。推定した反射光量に対して、今回検出した反射光量が所定の割合未満であるかどうかによって、障害物であるかどうかを判定する。
【解決手段】レーダ装置1は、物体10を、ある程度離れた距離で検出したときの反射光量を基準反射光量とする。また、物体10を検出する毎に、この物体を障害物であると仮定し、基準反射光量を用いて、今回算出した距離での反射光量を推定する。推定した反射光量に対して、今回検出した反射光量が所定の割合未満であるかどうかによって、障害物であるかどうかを判定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、車両等に取り付け、レーザ光や電波等の探査波を車両前方に照射し、物体からの反射波を検出することにより、車両前方に位置する物体を検出する物体検出装置に関する。
【背景技術】
【0002】
従来、車両に取り付け、レーザ光や電波等の探査波を自車両の前方に照射し、その反射波を検出することにより、自車両の前方に位置する先行車両等の物体の検出、および検出した物体までの距離を測定する装置がある。この装置の測定結果は、先行車両との車間距離を一定に保つ定車間距離追従走行(ACC : Adaptive Cruise Control )や渋滞時(低速時)の追従走行(LSF: Low Speed Following )等の車両の走行制御に利用できる。また、自車両前方に、衝突が避けられない先行車両や停止物を検出した場合、制動を掛けて衝突時の被害を軽減するプリクラッシュセーフティシステムにも利用できる。
【0003】
この装置は、自車両の走行を妨げる障害物と、自車両の走行を妨げない非障害物と、を区別して検出する必用がある。レーザ光を照射した場合、先行車両からの反射光の他に、路面設置物や上方設置物からの反射光がある。路面設置物は、反射率が高い材料が用いられている横断歩道等の路面標示や、路面に埋め込まれた反射物(所謂、キャッツアイ)等である。また、上方設置物は、歩道橋や上方に設置された看板等である。この路面設置物や上方設置物は、自車両の走行を妨げない非障害物である。また、停止車両や路面に立設しているポール等が障害物である。
【0004】
検出した物体が、障害物であるか、非障害物であるかを、を区別する構成としては、例えば、探査波を上向きに照射する上方照射による走査と、探査波を下向きに照射する下方照射による走査と、を繰り返し、検出した物体毎に、上方照射時の反射強度と、下方照射時の反射強度とを比較し、路面設置物、上方設置物、または障害物のいずれであるかを判定するものがある(特許文献1参照)。具体的には、上方照射時の反射強度と、下方照射時の反射強度との差分の絶対値が予め定めた範囲内であれば、障害物と判定する。また、上方照射時の反射強度と、下方照射時の反射強度との差分の絶対値が予め定めた範囲内でなく、下方照射時の反射強度が上方照射時の反射強度よりも大きければ、路面設置物と判定する。さらに、上方照射時の反射強度と、下方照射時の反射強度との差分の絶対値が予め定めた範囲内でなく、上方照射時の反射強度が下方照射時の反射強度よりも大きければ、上方設置物と判定する。
【0005】
また、検出物までの距離が所定の範囲内であるかどうかを判定し、所定の範囲内であれば、その検出物からの反射波の波形パターンによって、路面であるか、障害物であるかを判定する構成もある(特許文献2参照)。
【0006】
さらに、探査波として電波を用い、アンテナで受信した反射信号について、物体で反射された後に、路面で一度反射されてから受信された反射波(マルチパス)の影響を検出することにより、物体の高さを算出する構成もある(特許文献3、4参照)。
【特許文献1】特開2006− 98220号公報
【特許文献2】特開2003− 42757号公報
【特許文献3】特開2001−153946号公報
【特許文献4】特開2001−124848号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
この発明の目的は、高さ方向における探査波の走査機構を不要にした簡単な構成で、路面標示や路面に埋め込まれた反射物等の路面設置物や、歩道橋や上方に設置された看板等の上方設置物と、自車両の走行を妨げる停止車両等の障害物と、を区別して検出することができる物体検出装置を提供することにある。
【課題を解決するための手段】
【0008】
この発明の物体検出装置は、上記目的を達するために、以下の構成を備えている。
【0009】
この物体検出装置では、探査波照射手段が探査波を照射する。この探査波は、物体で反射される。反射波検出手段が、物体で反射された反射波の強度を検出する。また、距離算出手段が、探査波照射手段が探査波を照射してから、反射波検出手段が物体で反射された反射波の強度を検出するまでの時間を用いて、この物体までの距離を算出する。また、記憶手段が、反射波検出手段が検出した物体からの反射波の強度と、距離算出手段が算出した物体までの距離と、を対応付けて記憶する。
【0010】
また、強度推定手段が、反射波検出手段が物体で反射された反射波の強度を検出する毎に、その物体が障害物であると仮定し、記憶手段がこの物体について記憶している反射波の強度と、その距離と、を用いて、距離算出手段が、今回算出した距離での反射波の強度を推定する。そして、障害物判定手段が、反射波検出手段が今回検出した反射波の強度と、強度推定手段が今回推定した反射波の強度と、を比較し、この物体が障害物であるかどうかを判定する。
【0011】
探査波は、ある程度の拡がり角を有しているので、探査波の照射範囲(照射面積)は、照射位置からの距離の2乗に比例する。また、反射波検出手段が反射波を検出する面積は一定であるため、反射波検出手段で検出される反射波の強度は、伝搬距離の2乗に反比例する。したがって、探査波の照射軸上に位置する物体(例えば、停止車両)からの反射光の強度は、その物体との距離が近づくにつれて増加する。一方、探査波の照射軸から外れている物体(例えば、路面設置物や、上方設置物)の場合、この物体に探査波が照射されている間は、近づくにつれて反射光の強度が増加する。しかし、ある程度まで近づくと、それ以降、この物体が探査波の照射範囲から外れていく。このため、路面設置物や、上方設置物の場合、ある程度まで近づくと、反射光の強度の増加率が低下するポイントがある。
【0012】
障害物判定手段は、物体からの反射光を検出する毎に、今回検出した物体までの距離が、反射光の強度の増加率が低下したポイントであるかどうかを判定することにより、物体が障害物であるかどうかを判定する。したがって、探査波を高さ方向に走査することなく、路面設置物や、上方設置物等を障害物でないと判定することができる。
【0013】
また、距離が近づいても、探査波の照射割合が変化しない(照射割合が100%)である物体であれば、反射波検出手段で検出される物体からの反射波の強度は、ほぼ距離の2乗に反比例する。照射割合とは、探査波の照射範囲に占める、物体に照射される面積の割合である。また、探査波の照射範囲は、上述したように、照射位置からの距離の2乗に比例する。このため、距離が近づくにつれて、探査波の照射割合が増加する物体であれば、照射される探査波の強度が最大で距離の2乗に反比例する。すなわち、物体で反射される反射波の強度が最大で距離の2乗に反比例する。したがって、障害物からの反射波の強度は、最大で距離の4乗に反比例し、最小で距離の2乗に反比例する。このことから、強度推定手段を、物体からの反射波の強度が距離の2乗に反比例することを条件にして、距離算出手段が今回算出した距離での反射波の強度を推定する構成とすることによって、障害物であるかどうかを判定するための適正な判定基準を得ることができる。
【0014】
また、障害物判定手段は、反射波検出手段が今回検出した反射波の強度が、強度推定手段が今回推定した反射波の強度よりも大きいかどうかによって、この物体が障害物であるかどうかを判定する構成としてもよいし、強度推定手段が今回推定した反射波の強度に対して所定の割合未満であるかどうかによって、この物体が障害物であるかどうかを判定する構成としてもよい。
【0015】
また、障害物判定手段が障害物でないと判定したとき、距離算出手段が算出したこの物体までの距離を用いて、この物体の高さを算出する高さ算出手段を備えてもよいし、さらには、この高さ算出手段が算出した高さが、予め定めた高さを超えていれば、この物体を障害物であると判定しなおす構成としてもよい。
【発明の効果】
【0016】
この発明によれば、高さ方向における探査波の走査機構を不要にした簡単な構成で、路面標示や路面に埋め込まれた反射物等の路面設置物や、歩道橋や上方に設置された看板等の上方設置物と、自車両の走行を妨げる停止車両等の障害物と、を区別して検出することができる。
【発明を実施するための最良の形態】
【0017】
以下、この発明の実施形態について説明する。
【0018】
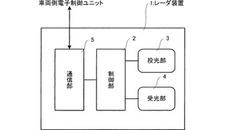
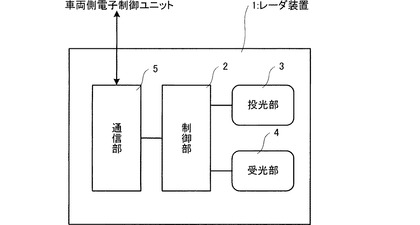
図1は、この発明の実施形態であるレーダ装置の主要部の構成を示す概略図である。このレーダ装置1は、取り付けた車両(以下、自車両と言う。)の前方に位置する物体の検出、および検出した物体までの距離の測定を行う。また、このレーダ装置1は、路面設置物や上方設置物と、自車両の走行を妨げる障害物と、を区別して検出する。路面設置物は、路面に描かれた横断歩道や、路面に埋め込まれたキャッツアイ等である。上方設置物は、歩道橋や上方に設置された看板等である。障害物は、自車両の走行車線上に停止している停止車両等である。このレーダ装置1は、物体を検出する探査波としてレーザ光を使用する。
【0019】
このレーダ装置1は、制御部2と、投光部3と、受光部4と、通信部5と、を備えている。制御部2は、本体各部の動作を制御するとともに、後述する演算処理等を行って、検出した物体までの距離の算出や、検出した物体が障害物であるかどうかの判定等を行う。投光部3は、発光素子であるLD(Laser Diode)を有している。投光部3は、制御部2からの指示にしたがって、LDを発光させ、パルス状のレーザ光を自車両の前方に照射する。受光部4は、受光素子であるPD(Photo Diode)を有している。PDは、投光部3のLDから出射したレーザ光が物体で反射された反射光を受光する位置に取り付けている。また、受光部4は、PDにおける受光光量(すなわち、PDの出力)をディジタル値に変換するA/D変換回路を有している。受光部4は、A/D変換回路でディジタル値に変換したPDの受光光量を制御部2に入力する。PDの受光光量は、受光した反射光の強度である。通信部5は、車両側電子制御ユニットとの間における通信を制御する。車両側電子制御ユニットは、自車両の走行速度等をレーダ装置1に通知する。また、レーダ装置1は、検出した障害物までの距離等を車両側電子制御ユニットに通知する。車両側電子制御ユニットは、レーダ装置1からの通知に応じて、車両の制動や操舵等にかかる走行制御を行う。
【0020】
なお、このレーダ装置1は、投光部3が自車両前方に照射するレーザ光を水平方向、および垂直方向に走査するための機構を有していない。投光部3は、自車両の正面前方にレーザ光を照射する。
【0021】
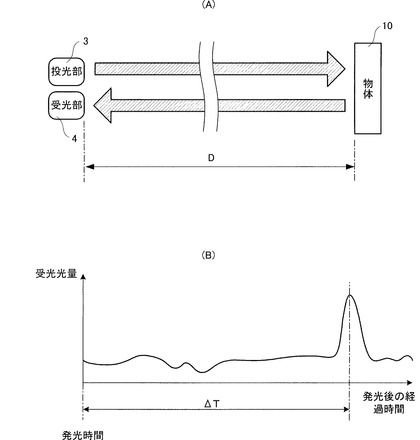
投光部3が自車両の正面前方に照射したパルス状のレーザ光は、図2(A)に示すように、自車両の正面前方に位置する物体10で反射され、その反射光が受光部4で受光される。受光部4における受光光量は、図2(B)に示すように、物体10で反射された反射光の受光により、受光光量が一時的に増加する。制御部2は、投光部3がレーザ光を自車両前方に照射してから、受光部4の受光光量が最大になるまでの時間ΔTを計測している。制御部2は、計測したΔTを用いて、投光部3が自車両前方に照射したレーザ光を反射した物体10までの距離Dを、
D=ΔT×c/2 (ただし、cは光速)
により算出する。
【0022】
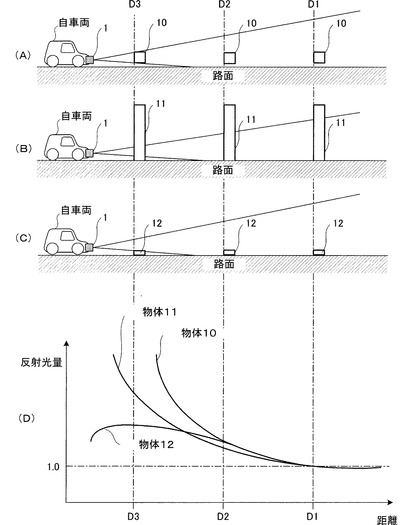
ここで、物体10との距離と、受光部4で受光される反射光の光量(反射波の強度)と、の関係について説明する。ここでは、図3(A)、(B)、および(C)に示す3つのパターンの物体10について説明する。ここで、3つの距離D1、D2、D3は、D1>D2>D3の関係である。例えば、D1=50m、D2=40m、D3=30mである。投光部3から照射されるレーザ光は、拡がり角があるため、距離が遠くなるにつれて、照射範囲(照射面積)が大きくなる。
【0023】
図3(A)に示す第1のパターンの物体10は、距離D3に位置しているときに、レーザ光の照射割合がほぼ100%である。自車両と物体10が離れるにつれてレーザ光の照射割合が減少する。照射割合とは、レーザ光の照射範囲に占める、物体に照射される面積の割合である。第1のパターンの物体10は、照射割合が最大で距離の2乗に反比例する。また、物体10は、距離D1、D2に位置しているとき、レーザ光の照射範囲内に位置する。
【0024】
図3(B)に示す第2のパターンの物体11は、物体10より高さが高い。この物体11は、距離D1、D2、およびD3のいずれに位置しているときであっても、レーザ光の照射割合がほぼ100%である。すなわち、上記第1のパターンの物体10よりも大きい物体である。
【0025】
図3(C)に示す第3のパターンの物体12は、物体10より高さが極めて低い。この物体12は、距離D1よりも離れているときには、上記第1のパターンの物体10とほぼ同様に、離れるにつれて照射割合が減少する。また、この物体12は、距離D1よりも近づくにつれて、レーザ光の照射範囲から外れる。
【0026】
上記第1のパターンに該当する物体10は、例えば小型車両や普通車両である。また、上記第2のパターンに該当する物体11は、トラックやバス等の大型車両である。また、上記第3のパターンに該当する物体12は、路面に描かれた横断歩道やキャッツアイ等の路面設置物である。
【0027】
上記3つのパターンの物体10、11、12における、距離に対する反射光量の変化を図3(D)に示す。レーザ光の照射範囲は、照射位置からの距離の2乗に比例する。このため、距離が近づくにつれて、レーザ光の照射割合が増加する物体10、12であれば、照射されるレーザ光の強度が最大で距離の2乗に反比例する。すなわち、物体10、12で反射される反射光の強度が最大で距離の2乗に反比例する。また、距離が近づいても照射割合が変化しない物体11であれば、物体11で反射される反射光の強度は、ほぼ一定である。また、物体10、11、12で反射され、受光部4に戻る反射光も距離の2乗に反比例して大きくなる。受光部4が有するPDは、受光面積が小さいので、検出される物体10、11、12からの反射光の強度が距離の2乗に反比例する。したがって、物体10からの反射光の強度は、最大で距離の4乗に反比例する。また、物体11からの反射光の強度は、ほぼ距離の2乗に反比例する。さらに、物体12からの反射光の強度は、反射面がレーザ光の照射範囲から外れるまでは(図3(C)に示す距離D3に近づくまでは)、物体10と同様に受光部4で受光される反射光の光量は、最大で距離の4乗に反比例するが、レーザ光の照射範囲から外れると、受光部4で受光される反射光の光量が低下する。
【0028】
なお、図3(D)では、物体10、11、12について、距離がD1であるときの反射光量を基準値(1.0)としたグラフである。すなわち、各物体10、11、12の反射率を正規化したグラフである。
【0029】
このように、自車両の走行を妨げる障害物(物体10、11)は、その物体10、11に近づくにつれて、反射光量が距離の2乗〜4乗の範囲で反比例しながら増加する。一方、自車両の走行を妨げない路面設置物(第3のパターンの物体12)は、ある程度の距離(反射面がレーザ光の照射範囲から外れはじめる距離)に近づくまでは、距離の2乗〜4乗の範囲で反比例しながら増加するが、レーザ光の照射範囲から外れはじめると反射光量が減少する。
【0030】
したがって、検出した物体10が障害物であるかどうかの判定は、以下の処理で行える。
(1)物体10を、ある程度離れた距離で検出したときの反射光量を基準反射光量とする。
(2)物体10を検出する毎に、この物体を障害物であると仮定し、基準反射光量を用いて、今回算出した距離での反射光量を推定する。この推定では、反射光量は、距離の2乗に反比例することを条件にすればよい。
(3)推定した反射光量に対して、今回検出した反射光量が所定の割合未満であるかどうかによって、障害物であるかどうかを判定する。この所定の割合は、例えば99%にしてもよいし、70%にしてもよいし、さらには、別の値にしてもよい。
【0031】
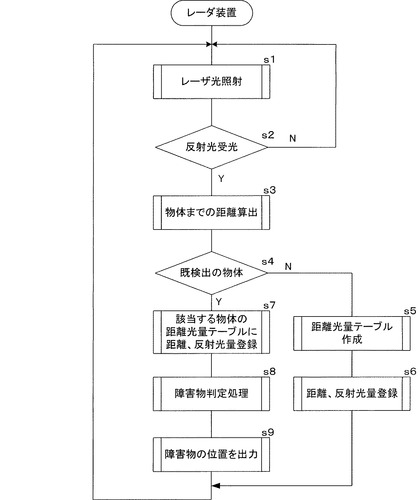
次に、このレーダ装置1の動作について説明する。図4は、レーダ装置の動作を示すフローチャートである。レーダ装置1は、投光部3により自車両前方にレーザ光を照射する(s1)。レーダ装置1は、例えば、予め定めた所定の時間間隔で、投光部3からレーザ光を自車両前方に照射する。レーダ装置1は、受光部4における物体10からの反射光の受光の有無を判定する(s2)。レーダ装置1は、受光部4で物体10からの反射光を受光していなければ、s1に戻る。レーダ装置1は、受光部4で物体10からの反射光を受光していれば、その物体10までの距離を算出する(s3)。また、レーダ装置1は、この物体10が新たに検出された物体10であるか、すでに検出されていた既検出の物体10であるかを判定する(s4)。
【0032】
自車両の車線変更や、前方車両の車線変更等があった場合、物体10が自車両の前方に突然あらわれることはあるが、通常は、物体10が自車両の前方に突然あらわれることはない。すなわち、レーダ装置1が物体10を最初に検出したとき、この物体10と、自車両と、の距離はある程度離れている。レーダ装置1は、新たに検出した物体10であれば、この物体10について距離と反射光量とを対応付けて登録する距離光量テーブルを作成し(s5)、s3で算出した物体までの距離と、今回受光部4で受光した反射光量とを、この距離光量テーブルに登録し(s6)、s1に戻る。
【0033】
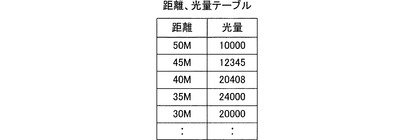
また、s4ですでに検出されていた物体10であると判定すると、この物体10についてすでに作成されている距離光量テーブルに、今回s3で算出した物体までの距離と、今回受光部4で受光した反射光量と、を登録する(s7)。複数回検出された物体10について作成された距離光量テーブルを図5に示す。レーダ装置1は、今回検出した物体10について、障害物であるかどうかを判定する障害物判定処理を行う(s8)。レーダ装置1は、s8にかかる障害物判定処理で、障害物でないと判定されなかった物体10について、この物体10の位置を車両側電子制御ユニットに通知し(s9)、s1に戻る。
【0034】
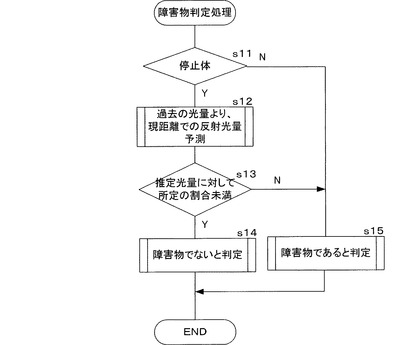
図6は、障害物判定処理を示すフローチャートである。レーダ装置1は、検出した物体10が移動体であるか、停止体であるかを判定する(s11)。s11では、車両側電子制御ユニットから取得した自車両の走行速度や、この物体10の前回の検出時の位置等を用いて、物体10自体の移動ベクトル(路面に対する移動ベクトル)を求め、移動ベクトルがほぼ0であれば停止体であると判定する。
【0035】
レーダ装置1は、物体10が移動体であれば、路面設置物でないので、障害物であると判定し(s15)、本処理を終了する。レーダ装置1は、s11で停止体であると判定すると、この物体10について、今回s3で算出した距離での反射光量を推定する(s12)。s12では、この物体10を障害物であると仮定し、この物体10からの反射光量は距離の2乗に反比例することを条件に推定する。また、この反射光量の推定では、この物体10を最初に検出したときの距離と、このときの反射光量を基準値として用いる。具体的には、この物体10を最初に検出したときの距離をD、このときの反射光量をIとし、今回s3で検出した距離がD0である場合、反射光量I0を、
I0=I×(D/D0)2
により推定する。
【0036】
なお、ここでは、反射光量を推定するときに、この物体10を最初に検出したときの距離と、このときの反射光量を基準値として用いるとしたが、2回目や3回目、さらには前回や前々回に検出したときの距離と、このときの反射光量を基準値としてもよい。
【0037】
レーダ装置1は、s12で推定した反射光量と、今回検出した物体10からの反射光量と、を比較し、推定した反射光量に対して、今回検出した反射光量が所定の割合未満であれば、この物体10が障害物でないと判定する(s13、s14)。一方、s12で推定した反射光量に対して、今回検出した反射光量が所定の割合未満でなければ、この物体10を障害物であると判定する(s13、s15)。
【0038】
なお、s15における判定は、一時的な判定であって、この時点で物体10が障害物でないと判定できないために、便宜的に障害物であると判定しているだけである。したがって、次回の検出時に、この物体10を障害物でないと判定することはある。
【0039】
このように、投光部3が自車両前方に照射するレーザ光を高さ方向に走査することなく、路面標示や路面に埋め込まれた反射物等の路面設置物と、自車両の走行を妨げる停止車両等の障害物と、を区別して検出することができる。また、このレーダ装置1は、投光部3が照射するレーザ光を高さ方向(垂直方向)に走査する機構部だけでなく、水平方向に走査する機構部も備えていないので、装置本体の構成が簡単であり、大幅なコストダウンが図れる。
【0040】
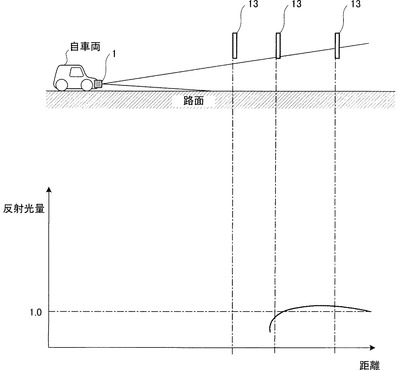
また、歩道橋や上方に設置された看板等の上方設置物は、図7に示すように、近づくにつれて、レーザ光の照射割合が減少し、ある程度の距離で、レーザ光の照射範囲から外れる。このため、路面設置物と同様に、ある程度の距離に近づくまでは、反射光量が増加するが、レーザ光の照射範囲から外れると、受光部4で受光される反射光の光量が低下する。したがって、上方設置物についても、障害物と区別して検出することができる。
【0041】
また、路面設置物と、上方設置物と、は、反射光が検出される距離範囲が大きく異なるので、この距離範囲によって、路面設置物であるか、上方設置物であるかの判定も行える。
【0042】
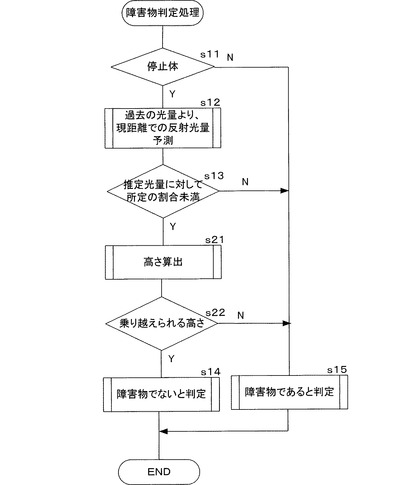
また、上記の説明では、s13で、予測した反射光量に対して、今回検出した反射光量が所定の割合未満であれば、s14で障害物でないと判定するとしたが、図8に示すように、s13とs14の間で、この物体10の高さを算出し、その高さに応じて障害物であるかどうかを判定するようにしてもよい。
【0043】
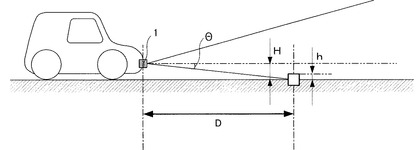
具体的には、s13で、予測した反射光量に対して、今回検出した物体10からの反射光量が所定の割合未満であると、この物体10の高さhを算出する(s21)。物体10の高さhの算出は、図9に示すように、レーザ光の照射範囲から外れたときの距離Dを用いて、
h=H−Dtanθ
(ただし、Hは投光部3のLDの発光面の高さ、θはレーザ光の下向きの拡がり角)
により算出できる。また、レーザ光の照射範囲から外れたときの距離Dは、今回算出した物体10までの距離を用いればよい。
【0044】
そして、s21で算出した物体10の高さが、自車両が乗り越えられる高さ(例えば15cm)であるかどうかを判定し(s22)、自車両が乗り越えられる高さであれば、s14でこの物体10を障害物でないと判定する。自車両が乗り越えられる高さについては、予め設定しておけばよい。一方、自車両が乗り越えられない高さであれば、s15でこの物体10を障害物であると判定する。
【0045】
このようにすれば、障害物であるかどうかの判定が一層精度よく行える。すなわち、自車両が乗り越えられない高さ物体10に衝突するのを一層確実に防止できる。
【0046】
なお、横断歩道や、看板等の上方設置物については、自車両がくぐり抜けられる高さであるかどうかを判定し、この判定結果に基づいて、障害物であるかどうかを判定すればよい。
【0047】
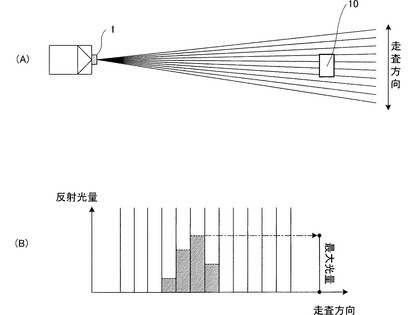
また、レーダ装置1は、投光部3が自車両前方に照射するレーザ光を、水平方向に走査する機構部を設けてもよい。この場合には、図10(A)に示すように、1つの物体に、いくつかの走査方向に照射したレーザ光が照射される。このため、図10(B)に示すように、1つの物体について、いくつかの走査方向からの反射光を検出することになる。このレーダ装置1では、距離光量テーブルに登録する物体10からの反射光量は、その物体10からの反射光の最大光量にすればよい。
【0048】
また、上述した実施形態では、レーザ光を探査波として使用する装置を例にして本願発明を説明したが、本願発明は、探査波としてミリ波等の電波を使用する物体検出装置にも適用できる。この場合には、物体10が停止車両であるか、マンホール等を路面設置物であるかを、区別して検出することができる。
【0049】
なお、探査波としてミリ波を使用する装置における検出物体までの距離の検出は、周知のように、ミリ波を照射してから反射波を検出するまでの時刻差に基づいて行える。
【図面の簡単な説明】
【0050】
【図1】レーダ装置の主要部の構成を示す概略図である。
【図2】距離を算出する処理を説明する図である。
【図3】物体のパターン毎に、受光部で受光される反射光を説明する図である。
【図4】レーダ装置の動作を示すフローチャートである。
【図5】複数回検出された物体について作成された距離光量テーブルを示す図である。
【図6】レーダ装置の障害物判定処理を示すフローチャートである。
【図7】物体が上方設置物である場合に、受光部で受光される反射光を説明する図である。
【図8】別のレーダ装置の障害物判定処理を示すフローチャートである。
【図9】路面設置物の高さの算出を説明する図である。
【図10】水平方向にレーザ光を走査するレーダ装置を説明する図である。
【符号の説明】
【0051】
1−レーダ装置
2−制御部
3−投光部
4−受光部
5−通信部
10、11、12−物体
【技術分野】
【0001】
この発明は、車両等に取り付け、レーザ光や電波等の探査波を車両前方に照射し、物体からの反射波を検出することにより、車両前方に位置する物体を検出する物体検出装置に関する。
【背景技術】
【0002】
従来、車両に取り付け、レーザ光や電波等の探査波を自車両の前方に照射し、その反射波を検出することにより、自車両の前方に位置する先行車両等の物体の検出、および検出した物体までの距離を測定する装置がある。この装置の測定結果は、先行車両との車間距離を一定に保つ定車間距離追従走行(ACC : Adaptive Cruise Control )や渋滞時(低速時)の追従走行(LSF: Low Speed Following )等の車両の走行制御に利用できる。また、自車両前方に、衝突が避けられない先行車両や停止物を検出した場合、制動を掛けて衝突時の被害を軽減するプリクラッシュセーフティシステムにも利用できる。
【0003】
この装置は、自車両の走行を妨げる障害物と、自車両の走行を妨げない非障害物と、を区別して検出する必用がある。レーザ光を照射した場合、先行車両からの反射光の他に、路面設置物や上方設置物からの反射光がある。路面設置物は、反射率が高い材料が用いられている横断歩道等の路面標示や、路面に埋め込まれた反射物(所謂、キャッツアイ)等である。また、上方設置物は、歩道橋や上方に設置された看板等である。この路面設置物や上方設置物は、自車両の走行を妨げない非障害物である。また、停止車両や路面に立設しているポール等が障害物である。
【0004】
検出した物体が、障害物であるか、非障害物であるかを、を区別する構成としては、例えば、探査波を上向きに照射する上方照射による走査と、探査波を下向きに照射する下方照射による走査と、を繰り返し、検出した物体毎に、上方照射時の反射強度と、下方照射時の反射強度とを比較し、路面設置物、上方設置物、または障害物のいずれであるかを判定するものがある(特許文献1参照)。具体的には、上方照射時の反射強度と、下方照射時の反射強度との差分の絶対値が予め定めた範囲内であれば、障害物と判定する。また、上方照射時の反射強度と、下方照射時の反射強度との差分の絶対値が予め定めた範囲内でなく、下方照射時の反射強度が上方照射時の反射強度よりも大きければ、路面設置物と判定する。さらに、上方照射時の反射強度と、下方照射時の反射強度との差分の絶対値が予め定めた範囲内でなく、上方照射時の反射強度が下方照射時の反射強度よりも大きければ、上方設置物と判定する。
【0005】
また、検出物までの距離が所定の範囲内であるかどうかを判定し、所定の範囲内であれば、その検出物からの反射波の波形パターンによって、路面であるか、障害物であるかを判定する構成もある(特許文献2参照)。
【0006】
さらに、探査波として電波を用い、アンテナで受信した反射信号について、物体で反射された後に、路面で一度反射されてから受信された反射波(マルチパス)の影響を検出することにより、物体の高さを算出する構成もある(特許文献3、4参照)。
【特許文献1】特開2006− 98220号公報
【特許文献2】特開2003− 42757号公報
【特許文献3】特開2001−153946号公報
【特許文献4】特開2001−124848号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
この発明の目的は、高さ方向における探査波の走査機構を不要にした簡単な構成で、路面標示や路面に埋め込まれた反射物等の路面設置物や、歩道橋や上方に設置された看板等の上方設置物と、自車両の走行を妨げる停止車両等の障害物と、を区別して検出することができる物体検出装置を提供することにある。
【課題を解決するための手段】
【0008】
この発明の物体検出装置は、上記目的を達するために、以下の構成を備えている。
【0009】
この物体検出装置では、探査波照射手段が探査波を照射する。この探査波は、物体で反射される。反射波検出手段が、物体で反射された反射波の強度を検出する。また、距離算出手段が、探査波照射手段が探査波を照射してから、反射波検出手段が物体で反射された反射波の強度を検出するまでの時間を用いて、この物体までの距離を算出する。また、記憶手段が、反射波検出手段が検出した物体からの反射波の強度と、距離算出手段が算出した物体までの距離と、を対応付けて記憶する。
【0010】
また、強度推定手段が、反射波検出手段が物体で反射された反射波の強度を検出する毎に、その物体が障害物であると仮定し、記憶手段がこの物体について記憶している反射波の強度と、その距離と、を用いて、距離算出手段が、今回算出した距離での反射波の強度を推定する。そして、障害物判定手段が、反射波検出手段が今回検出した反射波の強度と、強度推定手段が今回推定した反射波の強度と、を比較し、この物体が障害物であるかどうかを判定する。
【0011】
探査波は、ある程度の拡がり角を有しているので、探査波の照射範囲(照射面積)は、照射位置からの距離の2乗に比例する。また、反射波検出手段が反射波を検出する面積は一定であるため、反射波検出手段で検出される反射波の強度は、伝搬距離の2乗に反比例する。したがって、探査波の照射軸上に位置する物体(例えば、停止車両)からの反射光の強度は、その物体との距離が近づくにつれて増加する。一方、探査波の照射軸から外れている物体(例えば、路面設置物や、上方設置物)の場合、この物体に探査波が照射されている間は、近づくにつれて反射光の強度が増加する。しかし、ある程度まで近づくと、それ以降、この物体が探査波の照射範囲から外れていく。このため、路面設置物や、上方設置物の場合、ある程度まで近づくと、反射光の強度の増加率が低下するポイントがある。
【0012】
障害物判定手段は、物体からの反射光を検出する毎に、今回検出した物体までの距離が、反射光の強度の増加率が低下したポイントであるかどうかを判定することにより、物体が障害物であるかどうかを判定する。したがって、探査波を高さ方向に走査することなく、路面設置物や、上方設置物等を障害物でないと判定することができる。
【0013】
また、距離が近づいても、探査波の照射割合が変化しない(照射割合が100%)である物体であれば、反射波検出手段で検出される物体からの反射波の強度は、ほぼ距離の2乗に反比例する。照射割合とは、探査波の照射範囲に占める、物体に照射される面積の割合である。また、探査波の照射範囲は、上述したように、照射位置からの距離の2乗に比例する。このため、距離が近づくにつれて、探査波の照射割合が増加する物体であれば、照射される探査波の強度が最大で距離の2乗に反比例する。すなわち、物体で反射される反射波の強度が最大で距離の2乗に反比例する。したがって、障害物からの反射波の強度は、最大で距離の4乗に反比例し、最小で距離の2乗に反比例する。このことから、強度推定手段を、物体からの反射波の強度が距離の2乗に反比例することを条件にして、距離算出手段が今回算出した距離での反射波の強度を推定する構成とすることによって、障害物であるかどうかを判定するための適正な判定基準を得ることができる。
【0014】
また、障害物判定手段は、反射波検出手段が今回検出した反射波の強度が、強度推定手段が今回推定した反射波の強度よりも大きいかどうかによって、この物体が障害物であるかどうかを判定する構成としてもよいし、強度推定手段が今回推定した反射波の強度に対して所定の割合未満であるかどうかによって、この物体が障害物であるかどうかを判定する構成としてもよい。
【0015】
また、障害物判定手段が障害物でないと判定したとき、距離算出手段が算出したこの物体までの距離を用いて、この物体の高さを算出する高さ算出手段を備えてもよいし、さらには、この高さ算出手段が算出した高さが、予め定めた高さを超えていれば、この物体を障害物であると判定しなおす構成としてもよい。
【発明の効果】
【0016】
この発明によれば、高さ方向における探査波の走査機構を不要にした簡単な構成で、路面標示や路面に埋め込まれた反射物等の路面設置物や、歩道橋や上方に設置された看板等の上方設置物と、自車両の走行を妨げる停止車両等の障害物と、を区別して検出することができる。
【発明を実施するための最良の形態】
【0017】
以下、この発明の実施形態について説明する。
【0018】
図1は、この発明の実施形態であるレーダ装置の主要部の構成を示す概略図である。このレーダ装置1は、取り付けた車両(以下、自車両と言う。)の前方に位置する物体の検出、および検出した物体までの距離の測定を行う。また、このレーダ装置1は、路面設置物や上方設置物と、自車両の走行を妨げる障害物と、を区別して検出する。路面設置物は、路面に描かれた横断歩道や、路面に埋め込まれたキャッツアイ等である。上方設置物は、歩道橋や上方に設置された看板等である。障害物は、自車両の走行車線上に停止している停止車両等である。このレーダ装置1は、物体を検出する探査波としてレーザ光を使用する。
【0019】
このレーダ装置1は、制御部2と、投光部3と、受光部4と、通信部5と、を備えている。制御部2は、本体各部の動作を制御するとともに、後述する演算処理等を行って、検出した物体までの距離の算出や、検出した物体が障害物であるかどうかの判定等を行う。投光部3は、発光素子であるLD(Laser Diode)を有している。投光部3は、制御部2からの指示にしたがって、LDを発光させ、パルス状のレーザ光を自車両の前方に照射する。受光部4は、受光素子であるPD(Photo Diode)を有している。PDは、投光部3のLDから出射したレーザ光が物体で反射された反射光を受光する位置に取り付けている。また、受光部4は、PDにおける受光光量(すなわち、PDの出力)をディジタル値に変換するA/D変換回路を有している。受光部4は、A/D変換回路でディジタル値に変換したPDの受光光量を制御部2に入力する。PDの受光光量は、受光した反射光の強度である。通信部5は、車両側電子制御ユニットとの間における通信を制御する。車両側電子制御ユニットは、自車両の走行速度等をレーダ装置1に通知する。また、レーダ装置1は、検出した障害物までの距離等を車両側電子制御ユニットに通知する。車両側電子制御ユニットは、レーダ装置1からの通知に応じて、車両の制動や操舵等にかかる走行制御を行う。
【0020】
なお、このレーダ装置1は、投光部3が自車両前方に照射するレーザ光を水平方向、および垂直方向に走査するための機構を有していない。投光部3は、自車両の正面前方にレーザ光を照射する。
【0021】
投光部3が自車両の正面前方に照射したパルス状のレーザ光は、図2(A)に示すように、自車両の正面前方に位置する物体10で反射され、その反射光が受光部4で受光される。受光部4における受光光量は、図2(B)に示すように、物体10で反射された反射光の受光により、受光光量が一時的に増加する。制御部2は、投光部3がレーザ光を自車両前方に照射してから、受光部4の受光光量が最大になるまでの時間ΔTを計測している。制御部2は、計測したΔTを用いて、投光部3が自車両前方に照射したレーザ光を反射した物体10までの距離Dを、
D=ΔT×c/2 (ただし、cは光速)
により算出する。
【0022】
ここで、物体10との距離と、受光部4で受光される反射光の光量(反射波の強度)と、の関係について説明する。ここでは、図3(A)、(B)、および(C)に示す3つのパターンの物体10について説明する。ここで、3つの距離D1、D2、D3は、D1>D2>D3の関係である。例えば、D1=50m、D2=40m、D3=30mである。投光部3から照射されるレーザ光は、拡がり角があるため、距離が遠くなるにつれて、照射範囲(照射面積)が大きくなる。
【0023】
図3(A)に示す第1のパターンの物体10は、距離D3に位置しているときに、レーザ光の照射割合がほぼ100%である。自車両と物体10が離れるにつれてレーザ光の照射割合が減少する。照射割合とは、レーザ光の照射範囲に占める、物体に照射される面積の割合である。第1のパターンの物体10は、照射割合が最大で距離の2乗に反比例する。また、物体10は、距離D1、D2に位置しているとき、レーザ光の照射範囲内に位置する。
【0024】
図3(B)に示す第2のパターンの物体11は、物体10より高さが高い。この物体11は、距離D1、D2、およびD3のいずれに位置しているときであっても、レーザ光の照射割合がほぼ100%である。すなわち、上記第1のパターンの物体10よりも大きい物体である。
【0025】
図3(C)に示す第3のパターンの物体12は、物体10より高さが極めて低い。この物体12は、距離D1よりも離れているときには、上記第1のパターンの物体10とほぼ同様に、離れるにつれて照射割合が減少する。また、この物体12は、距離D1よりも近づくにつれて、レーザ光の照射範囲から外れる。
【0026】
上記第1のパターンに該当する物体10は、例えば小型車両や普通車両である。また、上記第2のパターンに該当する物体11は、トラックやバス等の大型車両である。また、上記第3のパターンに該当する物体12は、路面に描かれた横断歩道やキャッツアイ等の路面設置物である。
【0027】
上記3つのパターンの物体10、11、12における、距離に対する反射光量の変化を図3(D)に示す。レーザ光の照射範囲は、照射位置からの距離の2乗に比例する。このため、距離が近づくにつれて、レーザ光の照射割合が増加する物体10、12であれば、照射されるレーザ光の強度が最大で距離の2乗に反比例する。すなわち、物体10、12で反射される反射光の強度が最大で距離の2乗に反比例する。また、距離が近づいても照射割合が変化しない物体11であれば、物体11で反射される反射光の強度は、ほぼ一定である。また、物体10、11、12で反射され、受光部4に戻る反射光も距離の2乗に反比例して大きくなる。受光部4が有するPDは、受光面積が小さいので、検出される物体10、11、12からの反射光の強度が距離の2乗に反比例する。したがって、物体10からの反射光の強度は、最大で距離の4乗に反比例する。また、物体11からの反射光の強度は、ほぼ距離の2乗に反比例する。さらに、物体12からの反射光の強度は、反射面がレーザ光の照射範囲から外れるまでは(図3(C)に示す距離D3に近づくまでは)、物体10と同様に受光部4で受光される反射光の光量は、最大で距離の4乗に反比例するが、レーザ光の照射範囲から外れると、受光部4で受光される反射光の光量が低下する。
【0028】
なお、図3(D)では、物体10、11、12について、距離がD1であるときの反射光量を基準値(1.0)としたグラフである。すなわち、各物体10、11、12の反射率を正規化したグラフである。
【0029】
このように、自車両の走行を妨げる障害物(物体10、11)は、その物体10、11に近づくにつれて、反射光量が距離の2乗〜4乗の範囲で反比例しながら増加する。一方、自車両の走行を妨げない路面設置物(第3のパターンの物体12)は、ある程度の距離(反射面がレーザ光の照射範囲から外れはじめる距離)に近づくまでは、距離の2乗〜4乗の範囲で反比例しながら増加するが、レーザ光の照射範囲から外れはじめると反射光量が減少する。
【0030】
したがって、検出した物体10が障害物であるかどうかの判定は、以下の処理で行える。
(1)物体10を、ある程度離れた距離で検出したときの反射光量を基準反射光量とする。
(2)物体10を検出する毎に、この物体を障害物であると仮定し、基準反射光量を用いて、今回算出した距離での反射光量を推定する。この推定では、反射光量は、距離の2乗に反比例することを条件にすればよい。
(3)推定した反射光量に対して、今回検出した反射光量が所定の割合未満であるかどうかによって、障害物であるかどうかを判定する。この所定の割合は、例えば99%にしてもよいし、70%にしてもよいし、さらには、別の値にしてもよい。
【0031】
次に、このレーダ装置1の動作について説明する。図4は、レーダ装置の動作を示すフローチャートである。レーダ装置1は、投光部3により自車両前方にレーザ光を照射する(s1)。レーダ装置1は、例えば、予め定めた所定の時間間隔で、投光部3からレーザ光を自車両前方に照射する。レーダ装置1は、受光部4における物体10からの反射光の受光の有無を判定する(s2)。レーダ装置1は、受光部4で物体10からの反射光を受光していなければ、s1に戻る。レーダ装置1は、受光部4で物体10からの反射光を受光していれば、その物体10までの距離を算出する(s3)。また、レーダ装置1は、この物体10が新たに検出された物体10であるか、すでに検出されていた既検出の物体10であるかを判定する(s4)。
【0032】
自車両の車線変更や、前方車両の車線変更等があった場合、物体10が自車両の前方に突然あらわれることはあるが、通常は、物体10が自車両の前方に突然あらわれることはない。すなわち、レーダ装置1が物体10を最初に検出したとき、この物体10と、自車両と、の距離はある程度離れている。レーダ装置1は、新たに検出した物体10であれば、この物体10について距離と反射光量とを対応付けて登録する距離光量テーブルを作成し(s5)、s3で算出した物体までの距離と、今回受光部4で受光した反射光量とを、この距離光量テーブルに登録し(s6)、s1に戻る。
【0033】
また、s4ですでに検出されていた物体10であると判定すると、この物体10についてすでに作成されている距離光量テーブルに、今回s3で算出した物体までの距離と、今回受光部4で受光した反射光量と、を登録する(s7)。複数回検出された物体10について作成された距離光量テーブルを図5に示す。レーダ装置1は、今回検出した物体10について、障害物であるかどうかを判定する障害物判定処理を行う(s8)。レーダ装置1は、s8にかかる障害物判定処理で、障害物でないと判定されなかった物体10について、この物体10の位置を車両側電子制御ユニットに通知し(s9)、s1に戻る。
【0034】
図6は、障害物判定処理を示すフローチャートである。レーダ装置1は、検出した物体10が移動体であるか、停止体であるかを判定する(s11)。s11では、車両側電子制御ユニットから取得した自車両の走行速度や、この物体10の前回の検出時の位置等を用いて、物体10自体の移動ベクトル(路面に対する移動ベクトル)を求め、移動ベクトルがほぼ0であれば停止体であると判定する。
【0035】
レーダ装置1は、物体10が移動体であれば、路面設置物でないので、障害物であると判定し(s15)、本処理を終了する。レーダ装置1は、s11で停止体であると判定すると、この物体10について、今回s3で算出した距離での反射光量を推定する(s12)。s12では、この物体10を障害物であると仮定し、この物体10からの反射光量は距離の2乗に反比例することを条件に推定する。また、この反射光量の推定では、この物体10を最初に検出したときの距離と、このときの反射光量を基準値として用いる。具体的には、この物体10を最初に検出したときの距離をD、このときの反射光量をIとし、今回s3で検出した距離がD0である場合、反射光量I0を、
I0=I×(D/D0)2
により推定する。
【0036】
なお、ここでは、反射光量を推定するときに、この物体10を最初に検出したときの距離と、このときの反射光量を基準値として用いるとしたが、2回目や3回目、さらには前回や前々回に検出したときの距離と、このときの反射光量を基準値としてもよい。
【0037】
レーダ装置1は、s12で推定した反射光量と、今回検出した物体10からの反射光量と、を比較し、推定した反射光量に対して、今回検出した反射光量が所定の割合未満であれば、この物体10が障害物でないと判定する(s13、s14)。一方、s12で推定した反射光量に対して、今回検出した反射光量が所定の割合未満でなければ、この物体10を障害物であると判定する(s13、s15)。
【0038】
なお、s15における判定は、一時的な判定であって、この時点で物体10が障害物でないと判定できないために、便宜的に障害物であると判定しているだけである。したがって、次回の検出時に、この物体10を障害物でないと判定することはある。
【0039】
このように、投光部3が自車両前方に照射するレーザ光を高さ方向に走査することなく、路面標示や路面に埋め込まれた反射物等の路面設置物と、自車両の走行を妨げる停止車両等の障害物と、を区別して検出することができる。また、このレーダ装置1は、投光部3が照射するレーザ光を高さ方向(垂直方向)に走査する機構部だけでなく、水平方向に走査する機構部も備えていないので、装置本体の構成が簡単であり、大幅なコストダウンが図れる。
【0040】
また、歩道橋や上方に設置された看板等の上方設置物は、図7に示すように、近づくにつれて、レーザ光の照射割合が減少し、ある程度の距離で、レーザ光の照射範囲から外れる。このため、路面設置物と同様に、ある程度の距離に近づくまでは、反射光量が増加するが、レーザ光の照射範囲から外れると、受光部4で受光される反射光の光量が低下する。したがって、上方設置物についても、障害物と区別して検出することができる。
【0041】
また、路面設置物と、上方設置物と、は、反射光が検出される距離範囲が大きく異なるので、この距離範囲によって、路面設置物であるか、上方設置物であるかの判定も行える。
【0042】
また、上記の説明では、s13で、予測した反射光量に対して、今回検出した反射光量が所定の割合未満であれば、s14で障害物でないと判定するとしたが、図8に示すように、s13とs14の間で、この物体10の高さを算出し、その高さに応じて障害物であるかどうかを判定するようにしてもよい。
【0043】
具体的には、s13で、予測した反射光量に対して、今回検出した物体10からの反射光量が所定の割合未満であると、この物体10の高さhを算出する(s21)。物体10の高さhの算出は、図9に示すように、レーザ光の照射範囲から外れたときの距離Dを用いて、
h=H−Dtanθ
(ただし、Hは投光部3のLDの発光面の高さ、θはレーザ光の下向きの拡がり角)
により算出できる。また、レーザ光の照射範囲から外れたときの距離Dは、今回算出した物体10までの距離を用いればよい。
【0044】
そして、s21で算出した物体10の高さが、自車両が乗り越えられる高さ(例えば15cm)であるかどうかを判定し(s22)、自車両が乗り越えられる高さであれば、s14でこの物体10を障害物でないと判定する。自車両が乗り越えられる高さについては、予め設定しておけばよい。一方、自車両が乗り越えられない高さであれば、s15でこの物体10を障害物であると判定する。
【0045】
このようにすれば、障害物であるかどうかの判定が一層精度よく行える。すなわち、自車両が乗り越えられない高さ物体10に衝突するのを一層確実に防止できる。
【0046】
なお、横断歩道や、看板等の上方設置物については、自車両がくぐり抜けられる高さであるかどうかを判定し、この判定結果に基づいて、障害物であるかどうかを判定すればよい。
【0047】
また、レーダ装置1は、投光部3が自車両前方に照射するレーザ光を、水平方向に走査する機構部を設けてもよい。この場合には、図10(A)に示すように、1つの物体に、いくつかの走査方向に照射したレーザ光が照射される。このため、図10(B)に示すように、1つの物体について、いくつかの走査方向からの反射光を検出することになる。このレーダ装置1では、距離光量テーブルに登録する物体10からの反射光量は、その物体10からの反射光の最大光量にすればよい。
【0048】
また、上述した実施形態では、レーザ光を探査波として使用する装置を例にして本願発明を説明したが、本願発明は、探査波としてミリ波等の電波を使用する物体検出装置にも適用できる。この場合には、物体10が停止車両であるか、マンホール等を路面設置物であるかを、区別して検出することができる。
【0049】
なお、探査波としてミリ波を使用する装置における検出物体までの距離の検出は、周知のように、ミリ波を照射してから反射波を検出するまでの時刻差に基づいて行える。
【図面の簡単な説明】
【0050】
【図1】レーダ装置の主要部の構成を示す概略図である。
【図2】距離を算出する処理を説明する図である。
【図3】物体のパターン毎に、受光部で受光される反射光を説明する図である。
【図4】レーダ装置の動作を示すフローチャートである。
【図5】複数回検出された物体について作成された距離光量テーブルを示す図である。
【図6】レーダ装置の障害物判定処理を示すフローチャートである。
【図7】物体が上方設置物である場合に、受光部で受光される反射光を説明する図である。
【図8】別のレーダ装置の障害物判定処理を示すフローチャートである。
【図9】路面設置物の高さの算出を説明する図である。
【図10】水平方向にレーザ光を走査するレーダ装置を説明する図である。
【符号の説明】
【0051】
1−レーダ装置
2−制御部
3−投光部
4−受光部
5−通信部
10、11、12−物体
【特許請求の範囲】
【請求項1】
探査波を照射する探査波照射手段と、
前記探査波照射手段が照射した探査波について、物体で反射された反射波の強度を検出する反射波検出手段と、
前記探査波照射手段が探査波を照射してから、前記反射波検出手段が物体で反射された反射波の強度を検出するまでの計測時間を用いて、この物体までの距離を算出する距離算出手段と、
前記反射波検出手段が検出した物体からの反射波の強度と、前記距離算出手段が算出した物体までの距離と、を対応付けて記憶する記憶手段と、
前記反射波検出手段が物体で反射された反射波の強度を検出する毎に、前記記憶手段がこの物体について記憶している反射波の強度と、その距離と、を用いて、前記距離算出手段が今回算出した距離での反射波の強度を推定する強度推定手段と、
前記反射波検出手段が今回検出した反射波の強度と、前記強度推定手段が今回推定した反射波の強度と、を比較し、この物体が障害物であるかどうかを判定する障害物判定手段と、を備えた物体検出装置。
【請求項2】
前記強度推定手段は、物体からの反射波の強度が距離の2乗に反比例することを条件に推定する手段である、請求項1に記載の物体検出装置。
【請求項3】
前記障害物判定手段は、前記反射波検出手段が今回検出した反射波の強度が、前記強度推定手段が今回推定した反射波の強度に対して所定の割合未満であったとき、この物体を障害物でないと判定する手段である、請求項1、または2に記載の物体検出装置。
【請求項4】
前記障害物判定手段が障害物でないと判定したとき、前記距離算出手段が算出したこの物体までの距離を用いて、この物体の高さを算出する高さ算出手段を備えた請求項1〜3のいずれかに記載の物体検出装置。
【請求項5】
前記障害物判定手段は、前記高さ算出手段が算出した高さが、予め定めた高さを超えていれば、この物体を障害物であると判定しなおす手段である、請求項4に記載の物体検出装置。
【請求項1】
探査波を照射する探査波照射手段と、
前記探査波照射手段が照射した探査波について、物体で反射された反射波の強度を検出する反射波検出手段と、
前記探査波照射手段が探査波を照射してから、前記反射波検出手段が物体で反射された反射波の強度を検出するまでの計測時間を用いて、この物体までの距離を算出する距離算出手段と、
前記反射波検出手段が検出した物体からの反射波の強度と、前記距離算出手段が算出した物体までの距離と、を対応付けて記憶する記憶手段と、
前記反射波検出手段が物体で反射された反射波の強度を検出する毎に、前記記憶手段がこの物体について記憶している反射波の強度と、その距離と、を用いて、前記距離算出手段が今回算出した距離での反射波の強度を推定する強度推定手段と、
前記反射波検出手段が今回検出した反射波の強度と、前記強度推定手段が今回推定した反射波の強度と、を比較し、この物体が障害物であるかどうかを判定する障害物判定手段と、を備えた物体検出装置。
【請求項2】
前記強度推定手段は、物体からの反射波の強度が距離の2乗に反比例することを条件に推定する手段である、請求項1に記載の物体検出装置。
【請求項3】
前記障害物判定手段は、前記反射波検出手段が今回検出した反射波の強度が、前記強度推定手段が今回推定した反射波の強度に対して所定の割合未満であったとき、この物体を障害物でないと判定する手段である、請求項1、または2に記載の物体検出装置。
【請求項4】
前記障害物判定手段が障害物でないと判定したとき、前記距離算出手段が算出したこの物体までの距離を用いて、この物体の高さを算出する高さ算出手段を備えた請求項1〜3のいずれかに記載の物体検出装置。
【請求項5】
前記障害物判定手段は、前記高さ算出手段が算出した高さが、予め定めた高さを超えていれば、この物体を障害物であると判定しなおす手段である、請求項4に記載の物体検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−91485(P2010−91485A)
【公開日】平成22年4月22日(2010.4.22)
【国際特許分類】
【出願番号】特願2008−263305(P2008−263305)
【出願日】平成20年10月10日(2008.10.10)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成22年4月22日(2010.4.22)
【国際特許分類】
【出願日】平成20年10月10日(2008.10.10)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]