
物体検出装置
【課題】走行する車両等から撮像された時系列画像に撮像された物体を、精度良く検出することができる物体検出装置を提供する。
【解決手段】物体検出装置100は、物体が撮像された時系列画像を取得する画像取得部110と、回帰直線により物体の動き量を最適化し、最適化した動き量に基づいて、物体が撮像された領域を時系列画像から抽出し、該領域の分布情報を出力する領域抽出部120と、領域の分布情報と時系列画像とを取得し、分布情報が表す領域を、時空間MRFによって物体毎に分割することにより、該領域に撮像された物体を検出する領域分割部140とを備える。
【解決手段】物体検出装置100は、物体が撮像された時系列画像を取得する画像取得部110と、回帰直線により物体の動き量を最適化し、最適化した動き量に基づいて、物体が撮像された領域を時系列画像から抽出し、該領域の分布情報を出力する領域抽出部120と、領域の分布情報と時系列画像とを取得し、分布情報が表す領域を、時空間MRFによって物体毎に分割することにより、該領域に撮像された物体を検出する領域分割部140とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、時系列画像に撮像された物体を検出する物体検出装置に関する。
【背景技術】
【0002】
時系列画像に撮像された移動物体を、その画像上で追跡する追跡方法及び装置が、特許文献1に開示されている。特許文献1に開示された装置は、交差点などの定点から時系列画像を撮像し、撮像された移動物体を時系列画像上で追跡する。定点から撮像した時系列画像では背景がほとんど動かないため、特許文献1に開示された装置は、時系列画像に撮像された移動物体を検出することができた。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−207786号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、時系列画像を撮像する撮像装置が、例えば、走行する車両に搭載された場合、その車両から撮像された時系列画像の背景は、走行する車両の速度に応じて水平方向に流れてしまう。このため、物体検出装置は、走行する車両から撮像された時系列画像に撮像された物体を、精度良く検出することができないという問題があった。
【0005】
本発明は、前記の点に鑑みてなされたものであり、走行する車両等から撮像された時系列画像に撮像された物体を、精度良く検出することができる物体検出装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上記の課題を解決するためになされたものであり、物体が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部と、該画像を水平方向及び垂直方向に区分するブロック毎に、水平方向及び垂直方向の少なくとも一方の方向成分について、動きベクトルを算出する動きベクトル算出部と、前記動きベクトルが表す動き量を前記ブロック毎に算出する動き量算出部と、前記動き量が算出された前記方向成分について、該動き量の回帰直線を算出する回帰直線算出部と、前記動きベクトル算出部が水平方向及び垂直方向のいずれかの方向成分についてのみ動きベクトルを算出した場合、前記動き量と前記回帰直線との差分の絶対値である動き量差分を前記ブロック毎に算出し、一方、前記動きベクトル算出部が水平方向及び垂直方向の両方の方向成分について動きベクトルを算出した場合、前記動き量と前記回帰直線との水平方向の差分の絶対値と、前記動き量と前記回帰直線との垂直方向の差分の絶対値と、を合計した値である動き量差分を前記ブロック毎に算出する動き量差分算出部と、前記動き量差分が第1閾値以上であるか否かを前記ブロック毎に判定し、前記動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、前記動き量が算出された前記方向成分の方向に前記回帰直線が表す動き量だけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する画素値差分算出部と、前記画素値差分が第2閾値以下であるか否かを判定し、前記画素値差分が第2閾値以下である場合、該ブロックの前記動き量を、前記回帰直線が表す動き量に修正する動き量修正部と、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上であるか否かを前記ブロック毎に判定し、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上である前記ブロックを、前記画像から検出するブロック検出部と、前記ブロック検出部が検出した前記ブロックが互いに隣接している領域を前記画像から抽出し、抽出した該領域を表す分布情報を出力する領域出力部と、前記領域出力部から前記分布情報と、前記画像取得部から前記画像と、を取得し、時間軸方向における該画像のテクスチャの相関と、時間軸方向における該画像の画素値の相関と、空間軸方向における該画像の画素値の相関と、前記動きベクトル算出部が算出した前記動きベクトルの相関とのうち少なくとも1つに基づいて、前記領域出力部から取得した前記分布情報が表す前記領域を前記物体毎に分割することにより、該領域に撮像された前記物体を検出する領域分割部と、を備えることを特徴とする物体検出装置である。
【0007】
また、本発明は、前記領域分割部が分割した前記領域の形状を、前記領域出力部が出力した前記分布情報が表す前記領域の形状に修正する領域修正部を備えることを特徴とする物体検出装置である。
【0008】
また、本発明は、前記領域出力部が出力した分布情報と、前記領域分割部が分割する前記領域の分布情報とを比較し、前記領域出力部が出力した前記分布情報と、前記領域分割部が分割する前記領域の分布情報とが異なる場合、前記領域出力部が出力した前記分布情報を、新たな領域の分布情報として前記領域分割部に出力する領域生成部を備えることを特徴とする物体検出装置である。
【0009】
また、本発明は、前記領域分割部が、隣接する前記ブロック同士の前記動きベクトルの類似性が高くなるように前記動きベクトルを最適化し、該最適化した動きベクトルを前記動きベクトル算出部に出力し、前記動きベクトル算出部が、前記領域分割部が最適化した動きベクトルに基づいて、ブロックマッチング法により動きベクトルを算出することを特徴とする物体検出装置である。
【0010】
また、本発明は、人が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部と、前記画像取得部から前記画像を取得し、時間軸方向における該画像のテクスチャの相関と、時間軸方向における該画像の画素値の相関と、空間軸方向における該画像の画素値の相関と、前記動きベクトル算出部が算出した前記動きベクトルの相関とのうち、少なくとも1つに基づいて、該画像に含まれる領域を分割する領域分割部と、HOG特徴量に基づいて、前記人が撮像されている領域を該画像内で探索し、該領域を表す分布情報を出力する領域探索部と、前記領域探索部から該分布情報を取得し、取得した該分布情報に基づいて、前記人が撮像されている領域と、前記人が撮像されていない領域とに、前記領域分割部が分割した前記領域を分けることで、該領域の形状を修正する領域修正部と、を備えることを特徴とする物体検出装置である。
【0011】
また、本発明は、前記領域探索部が、前記画像において前記人が撮像されている領域が、他の時刻に撮像された前記画像における該領域と比較して垂直方向に短いか否かを判定し、前記領域修正部が、前記画像において前記人が撮像されている領域が、他の時刻に撮像された前記画像における該領域と比較して垂直方向に短いと前記領域探索部が判定した場合、垂直方向に長くなるように該領域の形状を修正することを特徴とする物体検出装置である。
【0012】
また、本発明は、物体が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部と、該画像を水平方向及び垂直方向に区分するブロック毎に、水平方向及び垂直方向の少なくとも一方の方向成分について、動きベクトルを算出する動きベクトル算出部と、前記動きベクトルが表す動き量を前記ブロック毎に算出する動き量算出部と、前記動き量が算出された前記方向成分について、該動き量の回帰直線を算出する回帰直線算出部と、前記動きベクトル算出部が水平方向及び垂直方向のいずれかの方向成分についてのみ動きベクトルを算出した場合、前記動き量と前記回帰直線との差分の絶対値である動き量差分を前記ブロック毎に算出し、一方、前記動きベクトル算出部が水平方向及び垂直方向の両方の方向成分について動きベクトルを算出した場合、前記動き量と前記回帰直線との水平方向の差分の絶対値と、前記動き量と前記回帰直線との垂直方向の差分の絶対値と、を合計した値である動き量差分を前記ブロック毎に算出する動き量差分算出部と、前記動き量差分が第1閾値以上であるか否かを前記ブロック毎に判定し、前記動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、前記動き量が算出された前記方向成分の方向に前記回帰直線が表す動き量だけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する画素値差分算出部と、前記画素値差分が第2閾値以下であるか否かを判定し、前記画素値差分が第2閾値以下である場合、該ブロックの前記動き量を、前記回帰直線が表す動き量に修正する動き量修正部と、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上であるか否かを前記ブロック毎に判定し、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上である前記ブロックを、前記画像から検出するブロック検出部と、前記ブロック検出部が検出した前記ブロックが互いに隣接している領域を前記画像から抽出することにより、抽出した該領域に撮像された前記物体を検出する領域出力部と、を備えることを特徴とする物体検出装置である。
【発明の効果】
【0013】
本発明によれば、物体検出装置は、走行する車両等から撮像された時系列画像に撮像された物体を、回帰直線により最適化された動き量に基づいて検出するので、撮像された物体を精度良く検出することができる。
【図面の簡単な説明】
【0014】
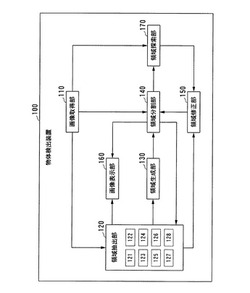
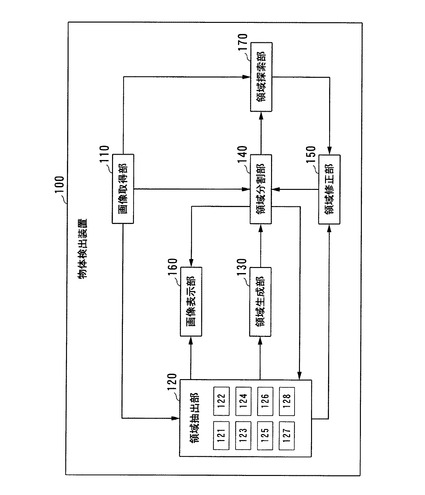
【図1】本発明の一実施形態における、物体検出装置の構成を示すブロック図である。
【図2】本発明の一実施形態における、撮像された画像と、動き量と、最適化された動き量との関係を表す図である。
【図3】本発明の一実施形態における、撮像された画像と、最適化された動き量と、最適化された回帰直線回帰直線との関係を表す図である。
【図4】本発明の一実施形態における、モーション・クラスタリングの結果の例を表す図である。
【図5】本発明の一実施形態における、時間軸方向のテクスチャ相関の例を表す図である。
【図6】本発明の一実施形態における、時間軸方向の領域相関の例を表す図である。
【図7】本発明の一実施形態における、空間軸方向の隣接相関の例を表す図である。
【図8】本発明の一実施形態における、空間軸方向の動きベクトル相関の例を表す図である。
【図9】本発明の一実施形態における、時空間MRFモデルによる検出結果の例を表す図である。
【図10】本発明の一実施形態における、スプリット判定前の検出結果の例を表す図である。
【図11】本発明の一実施形態における、スプリット判定に基づく領域分割の例を表す図である。
【図12】本発明の一実施形態における、スプリット判定後の検出結果の例を表す図である。
【図13】本発明の一実施形態における、歩行者の脚の動きが、背景の動きに同期した場合の検出結果の例を表す図である。
【図14】本発明の一実施形態における、歩行者の脚の動きが、背景の動きに同期した場合のオブジェクトマップの例を表す図である。
【図15】本発明の一実施形態における、歩行者の脚が撮像された領域を構成するブロックに、ラベルが改めて付与されたオブジェクトマップの例を表す図である。
【図16】本発明の一実施形態における、歩行者の脚が撮像された領域を構成するブロックに、ラベルが改めて付与された場合の検出結果の例を表す図である。
【発明を実施するための形態】
【0015】
本発明の一実施形態について図面を参照して詳細に説明する。図1には、物体検出装置の構成が、ブロック図で表されている。物体検出装置100は、走行する車両等から撮像された時系列画像に撮像された前景(例えば、人、物体)を検出する。物体検出装置100は、画像取得部110と、領域抽出部120と、領域生成部130と、領域分割部140と、領域修正部150と、画像表示部160と、領域探索部170とを備える。
【0016】
画像取得部110は、背景と前景とが撮像された画像であって、撮像された時刻が異なる複数の画像(時系列画像)を取得し、取得した時系列画像を、領域抽出部120と領域分割部140と領域探索部170とに出力する。
【0017】
領域抽出部120には、画像取得部110から時系列画像が入力される。領域抽出部120は、前景が撮像された領域を時系列画像から抽出し、抽出した領域を表す分布情報(例えば、画像における座標)を、領域生成部130を介して領域分割部140に出力する。領域抽出部120は、動きベクトル算出部121と、動き量算出部122と、回帰直線算出部123と、動き量差分算出部124と、画素値差分算出部125と、動き量修正部126と、ブロック検出部127と、領域出力部128とを備える。
【0018】
動きベクトル算出部121は、画像を水平方向(x成分)及び垂直方向(y成分)に区分するブロック(例えば、8×8画素)毎に、水平方向及び垂直方向の少なくとも一方の方向成分について、時系列画像における動きベクトルM(x,y)を算出する。ここで、(x,y)は、動きベクトルMが算出されたブロックのx座標及びy座標を表す。
【0019】
動きベクトル算出部121は、例えば、ブロックマッチング法により、動きベクトルをブロック毎に算出する。ここで、動きベクトル算出部121は、垂直方向よりも水平方向により広い範囲(例えば、水平方向に±24画素、垂直方向に±5画素の範囲)で、動きベクトルを画素単位で算出する。車両が水平方向に走行することで背景が水平方向に流れるので、動きベクトル算出部121は、垂直方向よりも水平方向により広い範囲で動きベクトルを算出すれば、動きベクトルを安定的に算出することができる。また、垂直方向に±5画素の範囲で動きベクトルが算出されているので、動きベクトル算出部121は、撮像装置が上下振動した場合でも、その影響を吸収して動きベクトルを安定的に算出することができる。
【0020】
ここで、動きベクトル算出部121が、水平方向及び垂直方向のいずれかの方向成分についてのみ動きベクトルを算出するか、又は、水平方向及び垂直方向の両方の方向成分について動きベクトルを算出するかについては、適宜選択されてよい。例えば、撮像装置の上下振動が少ない場合であれば、動きベクトル算出部121は、水平方向の成分についてのみ動きベクトルを算出するとしてもよい。
【0021】
動き量算出部122は、動きベクトル算出部121が算出した動きベクトルが表す動き量Mを、ブロック毎に算出する。
回帰直線算出部123は、動き量算出部122により動き量Mが算出された方向成分について、動き量の回帰直線Lを算出する。ここで、動き量Mは、全てのxにおいて回帰直線Lの近傍値を採るものと仮定される。
【0022】
動き量差分算出部124は、動きベクトル算出部121が水平方向及び垂直方向のいずれかの方向成分についてのみ動きベクトルを算出した場合、動き量Mと回帰直線Lとの差分の絶対値である動き量差分を、ブロック毎に算出する。一方、動き量差分算出部124は、動きベクトル算出部121が水平方向及び垂直方向の両方の方向成分について動きベクトルを算出した場合、動き量Mと回帰直線Lとの水平方向の差分の絶対値と、動き量Mと回帰直線Lとの垂直方向の差分の絶対値と、を合計した値である動き量差分を、ブロック毎に算出する。
【0023】
画素値差分算出部125は、動き量差分算出部124により算出された動き量差分が、予め定められた第1閾値以上であるか否かをブロック毎に判定し、動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、動き量Mが算出された方向成分の方向に回帰直線Lが表す動き量Mだけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する。
【0024】
動き量修正部126は、動き量Mを修正し、ブロック毎に最適化する。ここで、動き量修正部126は、画素値差分算出部125により算出された画素値差分が、予め定められた第2閾値以下であるか否かを判定し、画素値差分が第2閾値以下である場合、該ブロックの動き量Mを、回帰直線Lが表す動き量に修正する。これにより、動き量修正部126は、背景のテクスチャが複雑又は繰り返しパターンで個性化されている場合でも、動き量Mを最適化することができる。具体的には、以下のアルゴリズムにより、動き量Mが最適化される。
【0025】
まず、動きベクトルの水平方向の成分(x成分であるスカラー量)のみが算出された場合における、動き量Mを最適化するアルゴリズムについて説明する。
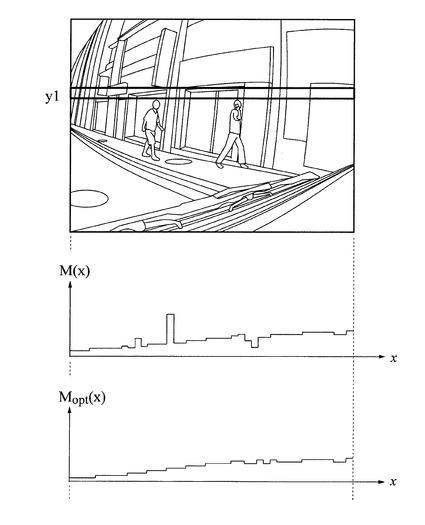
図2には、撮像された画像と、動き量と、最適化された動き量との関係が表されている。図2に示された画像は、走行する車両から撮像された時系列画像を構成する1画像フレームである。図2では、画像フレームに、歩行者A、歩行者B、及び壁の窪みが撮像されている。ここで、画像フレームに、水平方向に並ぶ複数のブロックにより構成されるマッチングラインを定める。マッチングラインのy座標を定数(図2では、y1)として、このマッチングラインにおける動き量をM(x)と表記する。
【0026】
動き量算出部122は、マッチングラインを構成する全てのブロックについて、ブロックマッチングにより算出された動きベクトルが表す動き量M(x)を算出する(ステップS1)。
回帰直線算出部123は、動き量Mが算出された方向成分(x成分)について、最小二乗法により、動き量の回帰直線L(x)を算出する(ステップS2)。
【0027】
動き量差分算出部124は、動き量Mと回帰直線Lとの差分の絶対値である動き量差分を、ブロック毎に算出する。また、画素値差分算出部125は、動き量差分算出部124により算出された動き量差分が、予め定められた第1閾値以上であるか否かをブロック毎に判定する。また、画素値差分算出部125は、動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、動き量Mを算出した方向成分の方向に回帰直線Lが表す動き量Mだけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する。そして、動き量修正部126は、画素値差分算出部125により算出された画素値差分が、予め定められた第2閾値以下であるか否かを判定し、画素値差分が第2閾値以下である場合、該ブロックの動き量M(x)を、回帰直線Lが表す最適化された動き量Mopt(x)に修正する。
【0028】
一方、動き量差分算出部124により算出された動き量差分が、予め定められた第1閾値未満である場合、最適化された動き量Mopt(x)として、動き量M(x)が採用される(ステップS3)。
【0029】
ステップS3において、動き量M(x)が修正された場合、領域抽出部120の処理は、ステップS2に戻る。一方、動き量M(x)が修正されなかった場合、領域抽出部120は、最適化された動き量Mopt(x)として、動き量M(x)を採用する。さらに、動き量修正部126は、最適化された回帰直線Lopt(x)として、回帰直線L(x)を採用する(ステップS4)。
このようにして、最適化された動き量Mopt(x)と、最適化された回帰直線Loptとが算出される。
【0030】
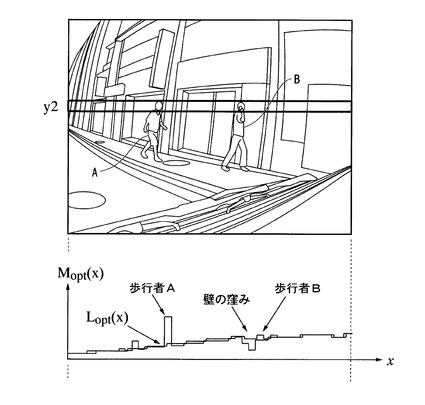
図3には、撮像された画像と、最適化された動き量と、最適化された回帰直線との関係が表されている。ここで、マッチングラインのy座標を定数(図3では、y2)として、最適化された動き量をMopt(x)と表記する。動き量M(x)におけるエラーが修正されたことで、最適化された動き量Mopt(x)が直線状に分布していることが、図3に示されている。また、最適化された動き量Mopt(x)と、最適化された回帰直線Lopt(x)との差分の絶対値が大きいブロックには、前景(オブジェクト)である歩行者A、歩行者B、及び壁の窪みが、それぞれ撮像されていることが判る。
【0031】
次に、水平方向及び垂直方向の両方の方向成分(x成分及びy成分)について動きベクトルが算出された場合における、動き量Mを最適化するアルゴリズムについて説明する。
動きベクトル算出部121は、動きベクトルM(x,y)=(Mh(x,y),Mv(x,y))を、画像における全てのブロックについて算出する(ステップSa1)。ここで、Mhは、動きベクトルの水平成分(動き量)である。また、Mvは、動きベクトルの垂直成分(動き量)である。
【0032】
回帰直線算出部123は、動き量Mhを算出した方向成分(x成分)について、最小二乗法により、動きベクトルの水平成分である動き量Mh(x,y)の回帰直線Lh(x,Y)を算出する。また、回帰直線算出部123は、動き量Mvを算出した方向成分(y成分)についても、最小二乗法により、動きベクトルの垂直成分である動き量Mv(x,y)の回帰直線Lv(X,y)を算出する(ステップSa2)。
【0033】
動き量差分算出部124は、動き量Mh(x,y)と回帰直線Lh(x,Y)との水平方向の差分の絶対値|Mh(x,y)−Lh(x,Y)|と、動き量Mv(x,y)と回帰直線Lv(X,y)との垂直方向の差分の絶対値|Mv(x,y)−Lv(X,y)|と、を合計した値である動き量差分|Mh(x,y)−Lh(x,Y)|+|Mv(x,y)−Lv(X,y)|を、全ブロックについて算出する。
【0034】
画素値差分算出部125は、動き量差分算出部124により算出された動き量差分|Mh(x,y)−Lh(x,Y)|+|Mv(x,y)−Lv(X,y)|が、予め定められた第1閾値以上であるか否かをブロック毎に判定する。動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、動き量Mを算出した方向成分(x成分及びy成分)のそれぞれの方向に、回帰直線Lhが表す動き量Mh及び回帰直線Lvが表す動き量Mvだけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する。また、動き量修正部126は、画素値差分算出部125により算出された画素値差分が、予め定められた第2閾値以下であるか否かを判定し、画素値差分が第2閾値以下である場合、該ブロックの動きベクトルM(x,y)、すなわち、該ブロックのx方向及びy方向への動き量を、回帰直線Lが表す動きベクトル(Lh(x,Y),Lv(X,y))に修正する。
【0035】
一方、動き量差分算出部124により算出された動き量差分が、予め定められた第1閾値未満である場合、最適化された動きベクトルMopt(x,y)として、(Mh(x,y),Mv(x,y))が採用される(ステップSa3)。
【0036】
ステップSa3において、動きベクトルM(x,y)が修正された場合、領域抽出部120の処理は、ステップS2に戻る。一方、領域抽出部120は、動きベクトルM(x,y)が修正されなかった場合、最適化された動きベクトルMopt(x,y)として、動きベクトルM(x,y)を採用する。さらに、動き量修正部126は、最適化された回帰直線Lhopt(x,Y)として、回帰直線Lh(x,Y)を採用する。また、動き量修正部126は、最適化された回帰直線Lvopt(X,y)として、回帰直線Lv(X,y)を採用する(ステップS4)。
このようにして、最適化された動きベクトルMopt(x,y)と、最適化された回帰直線Lhopt(x,Y)と、最適化された回帰直線Lvopt(X,y)とが算出される。
【0037】
ブロック検出部127は、最適化された動き量Moptと最適化された回帰直線Loptとの差分の絶対値が、予め定められた第3閾値以上であるか否かをブロック毎に判定し、最適化された動き量Moptと最適化された回帰直線Loptとの差分の絶対値が第3閾値以上であるブロックを、画像から検出する。
【0038】
領域出力部128は、ブロック検出部127が検出したブロックが互いに隣接している領域を画像から抽出し(モーション・クラスタリング)、抽出した該領域(クラスタ)を表す分布情報を、領域分割部140及び画像表示部160に出力する。ここで、領域出力部128は、物体(オブジェクト)が撮像された領域(ROI:Region of Interest)毎に、その物体に固有のラベル(物体ID)を付与し、付与したラベルを分布情報に対応付けて領域分割部140に出力する。
【0039】
図4には、モーション・クラスタリングの結果の例が表されている。図4において、背景と異なる色で表示されている領域(クラスタ)は、領域抽出部120により抽出された領域であり、背景の動き量とは異なる動き量のブロックが、互いに隣接している領域である。
【0040】
画像表示部160は、領域抽出部120が抽出した領域を、時系列画像に重畳して表示する(図4を参照)。また、画像表示部160は、領域分割部140が領域を分割した結果(トラッキング結果)、すなわち、領域分割部140が検出した前景(例えば、物体、人)を表す領域に外接する枠を、時系列画像に重畳して表示する(後述する図9を参照)。
【0041】
領域分割部140は、画像取得部110から時系列画像を取得する。また、領域分割部140は、領域抽出部120が抽出した領域を表す分布情報と、領域毎のラベルとを、領域生成部130を介して領域抽出部120から取得する。領域分割部140は、領域を表す分布情報と、領域毎のラベルとに基づいて、オブジェクトマップ(領域分割情報)を初期化する。
【0042】
ここで、オブジェクトマップとは、画像において領域が前景(オブジェクト)毎にどのように分割されているかを表す情報マップである。オブジェクトマップでは、前景が撮像された領域を構成する各ブロックに、その前景に固有のラベルが付与されている。領域分割部140は、オブジェクトマップにおいて、取得した分布情報が表す領域を前景毎に分割することにより、その領域に撮像された前景を検出する。
【0043】
領域分割部140は、時空間MRF(Markov Random Field)モデルにより領域を分割する。ここで、領域分割部140は、時間軸方向における該画像のテクスチャの相関と、時間軸方向における該画像の画素値の相関と、空間軸方向における該画像の画素値の相関と、動きベクトルの相関とのうち少なくとも1つに基づいて、領域を分割する。
【0044】
時空間MRFモデルの概要について説明する。
まず、エネルギ関数の項Upreを表す式(1)について説明する。式(1)は、パラメータMxyk及びパラメータDxykを用いたボルツマン(Boltzmann)分布の指数部分から導かれる。
【0045】
【数1】

【0046】
ここで、パラメータDxykは、式(2)で表される。また、パラメータMxyk及びパラメータDxykの添え字xは、時刻t−1に撮像された前画像G(t−1)に対して算出されたオブジェクトマップが、X(t−1)=xであることを表す。また、パラメータMxyk及びパラメータDxykの添え字yは、時刻tに撮像された現画像G(t)に対して算出されるオブジェクトマップが、X(t)=yであることを表す。また、yの添え字kは、最適化の対象となっているブロックが、k番目のブロックCk(t)であることを表す。
【0047】
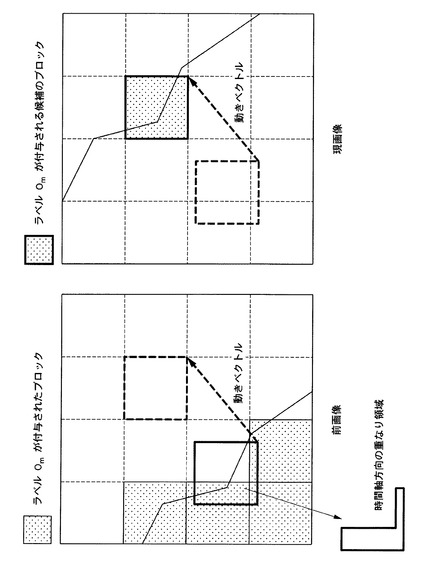
パラメータDxykは、前画像G(t−1)と現画像G(t)との間のテクスチャ相関を表す。図5には、時間軸方向のテクスチャ相関の例が表されている。テクスチャ相関は、前画像G(t−1)と現画像G(t)との局所的な動きベクトルVomk=(−vmki,−vmkj)により定まる位置関係にある画素同士について、その画素値の絶対差分和により表される。ここで、Omは、領域を構成するブロックCk(t)に付与するラベルの候補である。また、i及びjは、画像フレームにおける空間座標を表す。また、パラメータDxykが小さいほど、ラベルOmが付与された領域にブロックCk(t)が属する可能性が高いことを表す。
【0048】
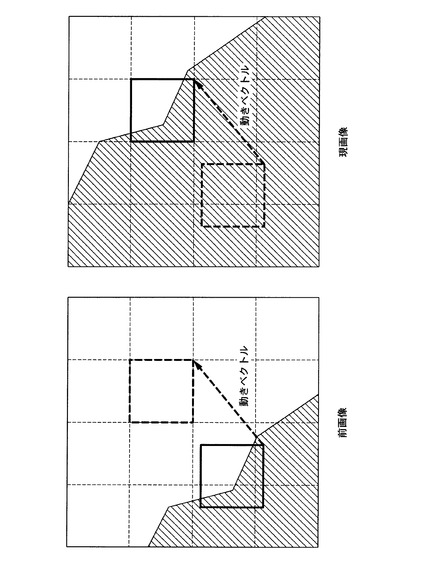
パラメータMxykは、現画像G(t)に対して算出されるオブジェクトマップX(t)と、前画像G(t−1)に対して算出されたオブジェクトマップX(t−1)との領域相関を定量化するパラメータである。
【0049】
図6には、時間軸方向の領域相関の例が表されている。ブロックCk(t)に関する領域相関を評価する場合について説明する。パラメータMxykは、局所的な動きベクトルVomk=(−vmki,−vmkj)により平行移動されたブロックCk(t)と、前画像G(t−1)においてラベルOmが付与されているブロックとが重なっている範囲に含まれる領域(重なり領域)を構成する画素の数である。また、パラメータMxykが値0に近いほど、ラベルOmの付与が確からしいことを表す。
【0050】
次に、エネルギ関数の項UNを表す式(3)について説明する。
【0051】
【数2】
【0052】
ここで、パラメータNykは、現画像G(t)に対して算出されるオブジェクトマップX(t)における、同一のラベルが付与されたブロックの隣接相関を表す。パラメータNykの添え字yは、時刻tに撮像された現画像G(t)に対して算出されるオブジェクトマップが、X(t)=yであることを表す。また、yの添え字kは、最適化の対象となっているブロックが、k番目のブロックCk(t)であることを表す。
【0053】
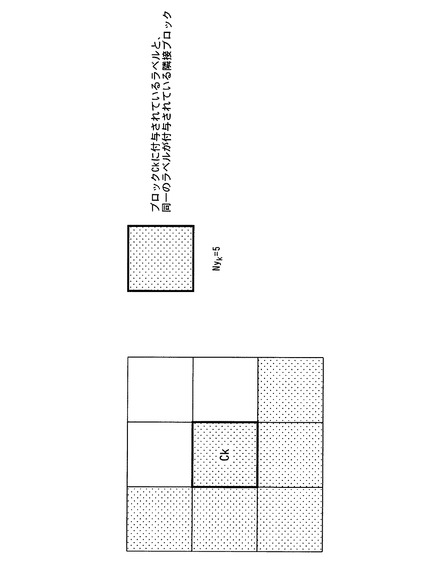
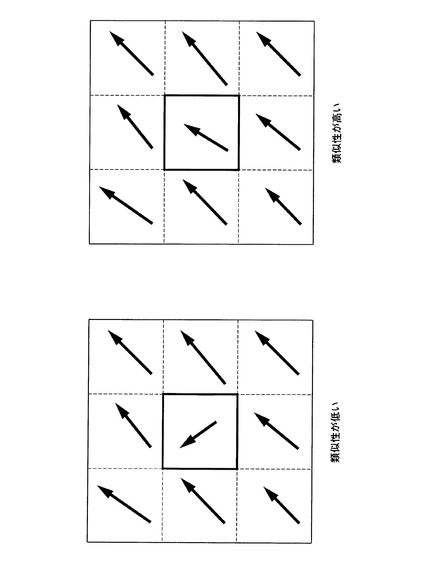
図7には、空間軸方向の隣接相関の例が表されている。ブロックCk(t)にラベルOmが付与されている場合、パラメータNykは、ブロックCk(t)に隣接するブロックのうち、同一のラベルOmが付与されているブロックの数を表す。図7に示す例では、パラメータNyk=5である。また、パラメータNykが大きいほど、ラベルOmの付与が確からしいことを表す。
【0054】
次に、エネルギ関数の項Umvを表す式(4)について説明する。
【0055】
【数3】
【0056】
ここで、Bk(t−1)は、時刻t−1におけるブロックCk(t−1)に隣接するブロック(図7を参照)を表す。また、ベクトルVCk(t−1)は、ブロックCk(t−1)からブロックCk(t)への動きベクトルである。また、ベクトルVBk(t−1)は、ブロックBk(t−1)からブロックBk(t)への動きベクトルである。また、ベクトルVCk(t−1)と、ベクトルVBk(t−1)との類似性が高いほど、ブロックCk(t−1)において算出された動きベクトルが確からしいことを表す。
【0057】
図8には、空間軸方向の動きベクトル相関の例が表されている。領域分割部140は、パラメータMxyk、及びパラメータDxykを同時に満たすことを条件として、隣接するブロック同士の動きベクトルの類似性(動きベクトル相関)が高くなるように各ブロックの動きベクトルを最適化し、式(4)により確率緩和を実行する。
【0058】
エネルギ関数は、式(1)〜(4)を用いて、式(5)により表される。
【0059】
【数4】
【0060】
ここで、U(yk)における項UM(Mxyk)及びUD(Dxyk)は、前景が撮像された領域を構成するブロックにおける局所的な動きベクトルを基に評価される。また、Umv(Ck(t−1))は、前画像G(t−1)から現画像G(t)への動きベクトルを基に評価される。これらの評価により、式(5)が最小化されることで、領域の境界(輪郭)及び動きベクトルが最適化される。すなわち、この最適化問題は、エネルギ関数の式(5)を最小化するオブジェクトマップX(t)=yを算出する問題に帰着する。
以上が、時空間MRFモデルの概要である。
【0061】
領域分割部140は、時空間MRFモデルにより領域を分割した結果(トラッキング結果)、すなわち、検出した前景(例えば、物体、人)を表す領域に外接する枠を、時系列画像に重畳させて画面に表示させる。
【0062】
ここで、領域分割部140は、時空間MRFモデルにより最適化した領域の境界及び動きベクトルを、領域抽出部120にフィードバックしてもよい(最適化ループ)。このフィードバックされた領域の境界及び動きベクトルに基づいて、領域抽出部120は、領域を抽出し、抽出した該領域を表す分布情報と、領域毎に付与したラベルとを、領域分割部140に出力する。領域分割部140は、この最適化ループにおいて、領域を分割した結果と、動きベクトルを最適化した結果とが変化しなくなった場合に、最適化ループを終わらせ、検出した前景を表す領域に外接する枠を、時系列画像に重畳して画面に表示させるとしてもよい。
【0063】
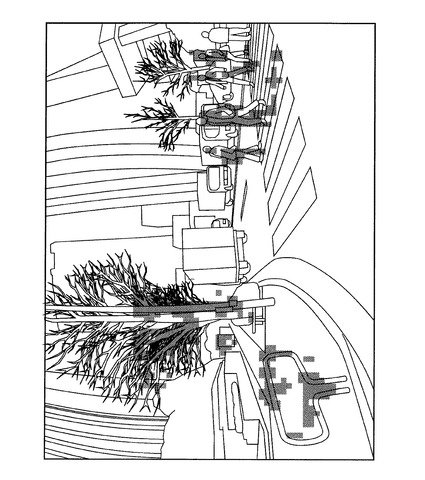
図9には、時空間MRFモデルによる検出結果の例が表されている。この例では、領域分割部140が領域を分割した結果(トラッキング結果)、すなわち、領域分割部140が検出した前景(図9では、歩行者、街路樹、ガードレールなど)を表す領域に外接する枠が、時系列画像に重畳されて画像表示部160に表示されている。
【0064】
図1に戻り、物体検出装置の構成の説明を続ける。領域生成部130は、領域抽出部120の領域出力部128が出力した分布情報を、領域分割部140に転送する。ここで、領域生成部130は、領域抽出部120の領域出力部128が出力した分布情報と、領域分割部140が分割する領域の分布情報(オブジェクトマップ)とを比較する。これらの分布情報が異なる場合、領域生成部130は、領域出力部128が出力した分布情報を、オブジェクトマップに無い新たな領域の分布情報として、領域分割部140に出力する。これにより、領域生成部130は、時系列画像に新たな前景が撮像された場合、その新たな前景が撮像された領域の分布を、領域分割部140に通知することができる。
【0065】
領域探索部170には、領域分割部140からオブジェクトマップと、画像取得部110から時系列画像とが入力される。領域探索部170は、HOG(Histograms of Oriented Gradients)特徴量に基づいて、人が撮像されている領域を該画像内で探索し、該領域を表す分布情報を領域修正部150に出力する。ここで、HOG特徴量は、時空間MRFモデルが属する物理層よりも上位にある形相(形態)層において、事象認識アルゴリズムにより画像特徴量として算出される。
【0066】
なお、領域探索部170は、人が撮像された領域の垂直方向下限の座標から、その領域の垂直方向上限の座標を推定することで、人が撮像されている領域を探索する範囲を予め限定してもよい。領域探索部170は、例えば、カメラキャリブレーションに応じて定まる領域の位置及び大きさの関係に基づいて、人が撮像されている領域を探索する範囲を予め限定してもよい。
【0067】
領域修正部150は、領域分割部140がオブジェクトマップにおいて分割した領域の形状(後述する「スプリット判定」に基づいて修正される前の形状)を、領域抽出部120の領域出力部128が出力した分布情報が表す領域の形状に修正する。ここで、領域修正部150は、領域分割部140が使用しているオブジェクトマップにおいて、領域抽出部120が抽出した領域に重なるブロックであって、同一のラベルが付与されたブロックが所定数以上である場合、領域分割部140がオブジェクトマップにおいて分割した領域の形状を、領域抽出部120の領域出力部128が出力した分布情報が表す領域の形状に修正する。これにより、領域分割部140がオブジェクトマップにおいて分割する領域の形状は、更新(リフレッシュ)される。
【0068】
<異なるオブジェクトが、画像上で近接又は重なっている(オクルージョン)場合について>
領域修正部150は、人が撮像されている領域の分布情報を領域探索部170から取得し、単一領域に複数の前景(例えば、物体、人)が撮像されていることにより、その単一領域を前景毎に分割することが可能か否かを判定する(スプリット判定)。ここで、単一領域に複数の前景が検出された場合、領域を前景毎に分割することが可能であると判定される。
【0069】
領域修正部150は、スプリット判定に基づいて、人が撮像されている領域と、人が撮像されていない領域とに、領域分割部140が分割した領域を分けることで、該領域の形状を修正する。具体的には、領域修正部150は、人が撮像されている領域を単一領域から差し引くことで、単一領域から差し引かれずに残った領域を、人が撮像されていない領域とする。
【0070】
領域修正部150は、このように修正した領域の形状(同一のラベルが付与されたブロックの分布情報)を領域分割部140に出力することにより、オブジェクトマップにおける領域の形状を修正する。
【0071】
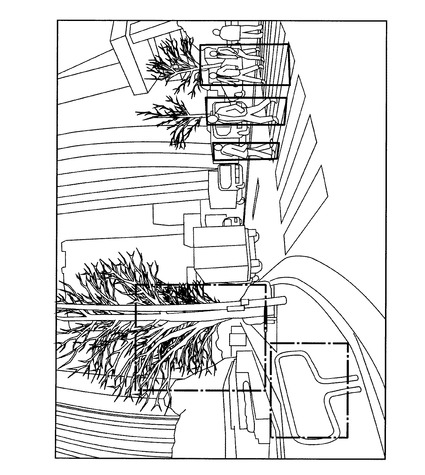
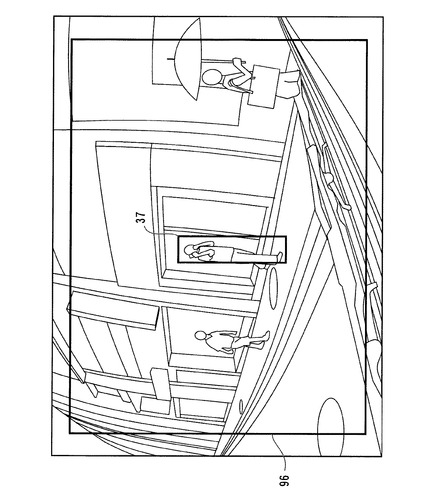
図10には、スプリット判定前の検出結果の例が表されている。図10では、前景(ROI)として、歩行者と電柱とが撮像されている。ここで、歩行者と電柱とが画像上で近接しているために、スプリット判定前において、領域分割部140は、歩行者と電柱とが一体となった前景を単一領域(図10では、ラベル37が付与されたブロック)として検出しているものとする。
【0072】
図10における枠37は、単一領域に割り当てられたラベル37が付与されたブロックが構成する領域に外接する枠である。また、図10における枠96は、背景であることを表すラベル96が付与されたブロックが構成する領域に外接する枠である。
【0073】
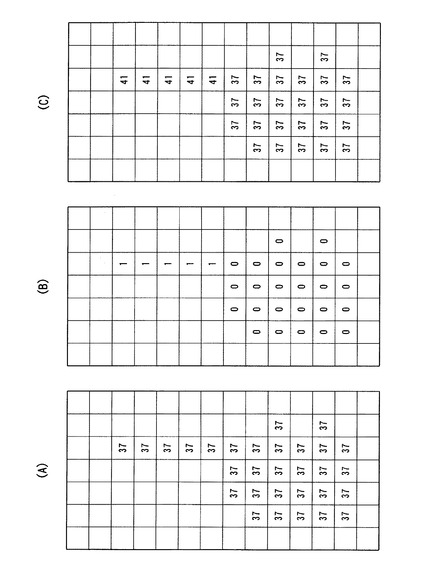
図11には、スプリット判定に基づく領域分割の例が表されている。ここで、図11における空白のブロックには、背景であること表すラベル96が付与されているものとする。図11(A)には、図10においてラベル37が付与されたブロックが構成する単一領域の分布が、オブジェクトマップにより表されている。また、図11(B)には、スプリット判定に基づいて、人が撮像されている領域と、人が撮像されていない領域とに分けられた領域の分布が、スプリット判定マップにより表されている。
【0074】
スプリット判定マップにおいて、値0が付与されているブロックは、HOG特徴量により人が撮像された領域であると判定されたブロックである。また、スプリット判定マップにおいて、値1が付与されているブロックは、人が撮像されていない領域であると判定されたブロックである。このスプリット判定マップは、領域修正部150から領域分割部140に、インタフェース関数を介して入力される。
【0075】
また、図11(C)には、領域分割部140が、スプリット判定マップに基づいて、図11(A)に示した単一領域を分割した結果を表すオブジェクトマップが表されている。領域分割部140は、スプリット判定マップにおいて値0が付与されているブロックに、元のラベル(図11(C)では、ラベル37)をそのまま付与する。一方、領域分割部140は、スプリット判定マップにおいて値1が付与されているブロックに、ラベル37とは異なるラベル(図11(C)では、ラベル41)を付与する。
【0076】
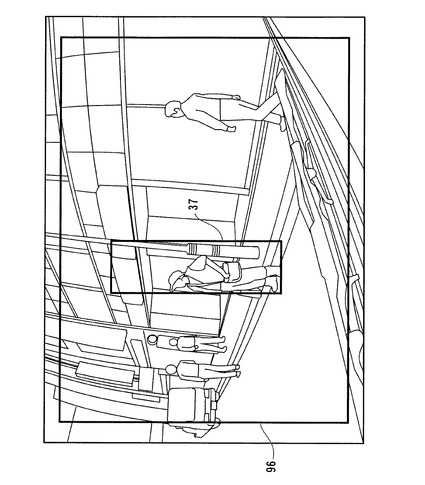
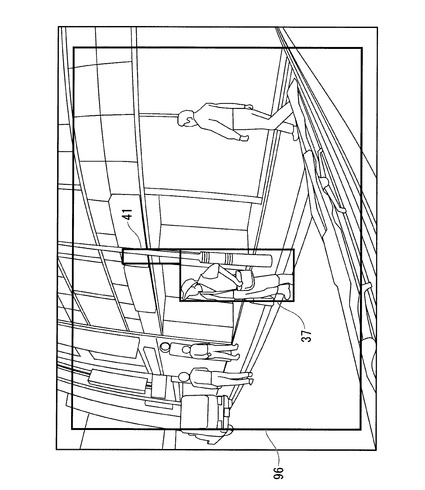
図12には、スプリット判定後の検出結果の例が表されている。図12において、枠37は、図11(C)に表されたラベル37が付与されたブロックが構成する領域に外接する枠である。また、枠41は、図11(C)に表されたラベル41が付与されたブロックが構成する領域に外接する枠である。画面上で近接している歩行者及び電柱は、スプリット判定前において、単一領域として検出されていたが(図10を参照)、スプリット判定後において、歩行者(ラベル37)及び電柱(ラベル41)が、それぞれ異なる領域(オブジェクト)として検出されていることが表されている。
【0077】
<歩行者の脚の動きが、背景の動きに同期した場合について>
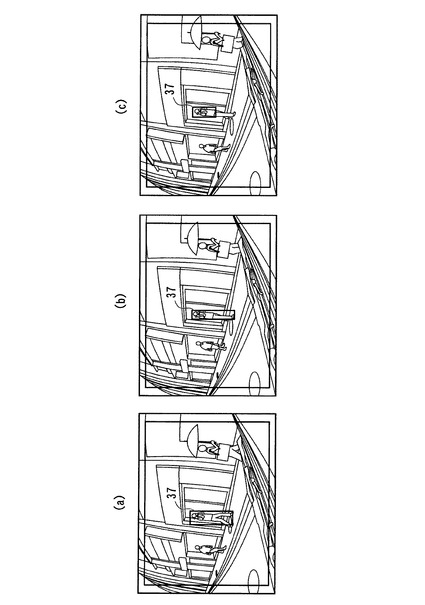
図13には、歩行者の脚の動きが、背景の動きに同期した場合の検出結果の例が表されている。図13(A)は、時刻t−2に撮像された画像である。また、図13(B)は、時刻t−1に撮像された画像である。また、図13(C)は、時刻tに撮像された画像である。
【0078】
走行する車両等から撮像された歩行者の脚の動きは、画像上において背景の動きと同期することがある。この場合、歩行者の脚の動き量と、背景の動き量との差が少なく、識別し難いので、歩行者の全身が撮像されている領域から、歩行者の脚が撮像されている領域のみが欠けてしまうことが起こり得る。
【0079】
ここで、時刻tに撮像された歩行者の脚の動きが、画像上において背景の動きと同期したとする。このため、図13(C)では、歩行者の脚が撮像されている領域だけ、枠37が欠けてしまっていることが表されている。
【0080】
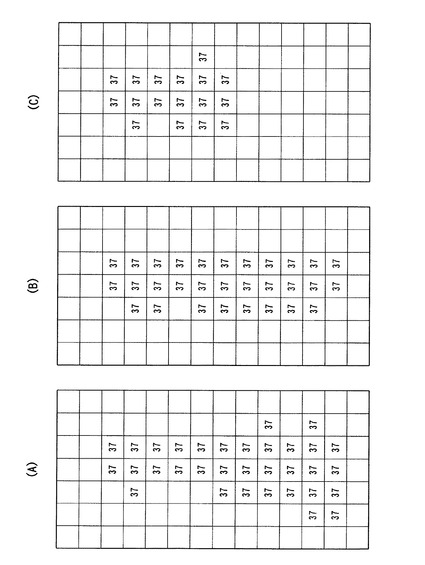
図14には、歩行者の脚の動きが、背景の動きに同期した場合のオブジェクトマップの例が表されている。ここで、図14(A)は図13(A)に対応し、図14(B)は図13(B)に対応し、図14(C)は図13(C)に対応する。図14(A)及び(B)では領域を構成するブロックに欠けは無いが、図14(C)では、歩行者の脚が撮像されている領域を構成するブロックが欠け、歩行者が検出された領域が垂直方向に短くなっていることが表されている。
【0081】
領域探索部170は、時系列画像において人が撮像されている領域が、他の時刻に撮像された時系列画像における該領域と比較して垂直方向に短いか否かを判定し、判定結果を領域修正部150に出力する。ここで、領域探索部170は、例えば、領域分割部140が使用しているオブジェクトマップにおいて、人が撮像されている領域の垂直方向の長さの等加重平均を、時系列画像毎に算出する。さらに、領域探索部170は、その等加重平均に基づいて、時刻t−2又は時刻t−1に撮像された時系列画像における該領域と比較して、時刻tに人が撮像されている領域が垂直方向に短いか否かを判定するとしてもよい。
【0082】
また、領域探索部170は、人(歩行者)が撮像された領域であるとHOG特徴量に基づいて判定した領域において、その人の足元が撮像された位置を示す座標(垂直方向下限の座標)を推定し、推定した座標を領域修正部150に出力する。
【0083】
領域修正部150は、時系列画像において人が撮像されている領域が、他の時刻に撮像された時系列画像における該領域と比較して垂直方向に短いと領域探索部170が判定した場合、該領域が垂直方向に長くなるように、ブロックに改めてラベルを付与することで、該領域の形状を修正する。形状を修正した結果は、インタフェース関数を介して領域分割部140に通知される。
【0084】
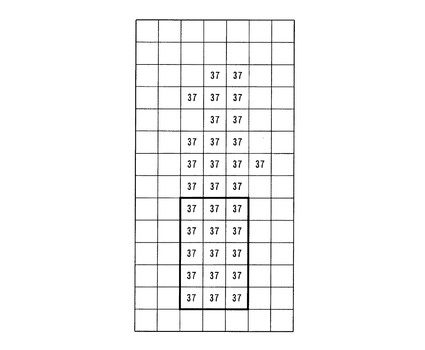
図15には、歩行者の脚が撮像された領域を構成するブロックに、ラベルが改めて付与されたオブジェクトマップの例が表されている。図14(C)に表されたオブジェクトマップにおいてラベル37が付与されたブロックから、歩行者の足元が撮像された領域の垂直方向下限の座標にあるブロックまで、図15では、ラベル37が改めて付与され(図15における太枠内)、領域の形状が垂直方向に長くなるように修正されていることが表されている。
【0085】
図16には、歩行者の脚が撮像された領域を構成するブロックに、ラベルが改めて付与された場合の検出結果の例が表されている。歩行者の脚が撮像された領域を構成するブロックに、ラベル37が改めて付与されたことにより(図15を参照)、歩行者の足元が撮像された領域まで、枠37が垂直方向に長くなっている。
【0086】
以上のように、物体検出装置100は、物体が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部110と、該画像を水平方向及び垂直方向に区分するブロック毎に、水平方向及び垂直方向の少なくとも一方の方向成分について、動きベクトルを算出する動きベクトル算出部121と、前記動きベクトルが表す動き量を前記ブロック毎に算出する動き量算出部122と、前記動き量が算出された前記方向成分について、該動き量の回帰直線を算出する回帰直線算出部123と、動きベクトル算出部121が水平方向及び垂直方向のいずれかの方向成分についてのみ動きベクトルを算出した場合、前記動き量と前記回帰直線との差分の絶対値である動き量差分を前記ブロック毎に算出し、一方、動きベクトル算出部121が水平方向及び垂直方向の両方の方向成分について動きベクトルを算出した場合、前記動き量と前記回帰直線との水平方向の差分の絶対値と、前記動き量と前記回帰直線との垂直方向の差分の絶対値と、を合計した値である動き量差分を前記ブロック毎に算出する動き量差分算出部124と、前記動き量差分が第1閾値以上であるか否かを前記ブロック毎に判定し、前記動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、前記動き量が算出された前記方向成分の方向に前記回帰直線が表す動き量だけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する画素値差分算出部125と、前記画素値差分が第2閾値以下であるか否かを判定し、前記画素値差分が第2閾値以下である場合、前記回帰直線が表す動き量に該ブロックの前記動き量を修正する動き量修正部126と、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上であるか否かを前記ブロック毎に判定し、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上である前記ブロックを、前記画像から検出するブロック検出部127と、ブロック検出部127が検出した前記ブロックが互いに隣接している領域を前記画像から抽出し、抽出した該領域を表す分布情報を出力する領域出力部128と、領域出力部128から前記分布情報と、前記画像取得部から前記画像と、を取得し、時間軸方向における該画像のテクスチャの相関と、時間軸方向における該画像の画素値の相関と、空間軸方向における該画像の画素値の相関と、動きベクトル算出部121が算出した前記動きベクトルの相関とのうち少なくとも1つに基づいて、領域出力部128から取得した前記分布情報が表す前記領域を前記物体毎に分割することにより、該領域に撮像された前記物体を検出する領域分割部140と、を備える。
【0087】
これにより、物体検出装置は、走行する車両等から撮像された時系列画像に撮像された物体を、回帰直線により最適化された動き量に基づいて検出するので、撮像された物体を精度良く検出することができる。
【0088】
また、物体検出装置100は、領域分割部140が分割した前記領域の形状を、領域出力部128が出力した前記分布情報が表す前記領域の形状に修正する領域修正部126を備える。これにより、物体検出装置は、オブジェクトマップにおいて分割する領域の形状を、所定周期で更新(リフレッシュ)することができる。
【0089】
また、物体検出装置100は、領域出力部128が出力した分布情報と、領域分割部140が分割する前記領域の分布情報とを比較し、領域出力部128が出力した前記分布情報と、領域分割部140が分割する前記領域の分布情報とが異なる場合、領域出力部128が出力した前記分布情報を、新たな領域の分布情報として領域分割部140に出力する領域生成部130を備える。これにより、物体検出装置は、時系列画像に新たな前景が撮像された場合、その新たな前景を表す分布情報に基づいて、撮像された物体を精度良く検出することができる。
【0090】
また、物体検出装置100は、領域分割部140が、隣接するブロック同士の動きベクトルの類似性が高くなるように動きベクトルを最適化し、該最適化した動きベクトルを動き量算出部122に出力し、動き量算出部122は、領域分割部140が最適化した動きベクトルに基づいて、ブロックマッチング法により動きベクトルを算出する。
【0091】
これにより、物体検出装置は、時空間MRFモデルとブロックマッチング法とによる最適化ループにより、動きベクトルを最適化することができる。
【0092】
また、物体検出装置100は、人が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部110と、画像取得部110から前記画像を取得し、時間軸方向における該画像のテクスチャの相関と、時間軸方向における該画像の画素値の相関と、空間軸方向における該画像の画素値の相関と、動きベクトル算出部121が算出した前記動きベクトルの相関とのうち、少なくとも1つに基づいて、該画像に含まれる領域を分割する領域分割部140と、HOG特徴量に基づいて、前記人が撮像されている領域を該画像内で探索し、該領域を表す分布情報を出力する領域探索部170と、領域探索部170から該分布情報を取得し、取得した該分布情報に基づいて、前記人が撮像されている領域と、前記人が撮像されていない領域とに、領域分割部140が分割した前記領域を分けることで、該領域の形状を修正する領域修正部150と、を備える。
【0093】
これにより、物体検出装置は、走行する車両から撮像された時系列画像に撮像された人を、HOG特徴量に基づいて検出するので、撮像された人を精度良く検出することができる。
【0094】
また、物体検出装置は、領域探索部170が、画像取得部110が取得した前記画像において、前記人が撮像されている領域が、他の画像と比較して垂直方向に短いか否かを判定し、領域修正部150が、前記人が撮像されている領域が他の画像と比較して垂直方向に短いと領域探索部170が判定した場合、垂直方向に長くなるように該領域の形状を修正する。
【0095】
これにより、物体検出装置は、撮像された歩行者の脚の動きと背景の動きとが同期した場合でも、その歩行者の全身を検出することができる。
【0096】
また、物体検出装置100は、物体が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部110と、該画像を水平方向及び垂直方向に区分するブロック毎に、水平方向及び垂直方向の少なくとも一方の方向成分について、動きベクトルを算出する動きベクトル算出部121と、前記動きベクトルが表す動き量を前記ブロック毎に算出する動き量算出部122と、前記動き量が算出された前記方向成分について、該動き量の回帰直線を算出する回帰直線算出部123と、動きベクトル算出部121が水平方向及び垂直方向のいずれかの方向成分についてのみ動きベクトルを算出した場合、前記動き量と前記回帰直線との差分の絶対値である動き量差分を前記ブロック毎に算出し、一方、動きベクトル算出部121が水平方向及び垂直方向の両方の方向成分について動きベクトルを算出した場合、前記動き量と前記回帰直線との水平方向の差分の絶対値と、前記動き量と前記回帰直線との垂直方向の差分の絶対値と、を合計した値である動き量差分を前記ブロック毎に算出する動き量差分算出部124と、前記動き量差分が第1閾値以上であるか否かを前記ブロック毎に判定し、前記動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、前記動き量が算出された前記方向成分の方向に前記回帰直線が表す動き量だけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する画素値差分算出部125と、前記画素値差分が第2閾値以下であるか否かを判定し、前記画素値差分が第2閾値以下である場合、前記回帰直線が表す動き量に該ブロックの前記動き量を修正する動き量修正部126と、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上であるか否かを前記ブロック毎に判定し、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上である前記ブロックを、前記画像から検出するブロック検出部127と、ブロック検出部127が検出した前記ブロックが互いに隣接している領域を前記画像から抽出することにより、抽出した該領域に撮像された前記物体を検出する領域出力部128と、を備える。
【0097】
以上、この発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【0098】
なお、以上に説明した物体検出装置を実現するためのプログラムを、コンピュータ読み取り可能な記録媒体に記録し、そのプログラムをコンピュータシステムに読み込ませて実行するようにしてもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムが送信された場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリ(RAM)のように、一定時間プログラムを保持しているものも含むものとする。また、上記プログラムは、このプログラムを記憶装置等に格納したコンピュータシステムから、伝送媒体を介して、あるいは、伝送媒体中の伝送波により他のコンピュータシステムに伝送されてもよい。ここで、プログラムを伝送する「伝送媒体」は、インターネット等のネットワーク(通信網)や電話回線等の通信回線(通信線)のように情報を伝送する機能を有する媒体のことをいう。また、上記プログラムは、前述した機能の一部を実現するためのものであってもよい。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であってもよい。
【符号の説明】
【0099】
100…物体検出装置、110…画像取得部、120…領域抽出部、121…動きベクトル算出部、122…動き量算出部、123…回帰直線算出部、124…動き量差分算出部、125…画素値差分算出部、126…動き量修正部、127…ブロック検出部、128…領域出力部、130…領域生成部、140…領域分割部、150…領域修正部、160…画像表示部、170…領域探索部
【技術分野】
【0001】
本発明は、時系列画像に撮像された物体を検出する物体検出装置に関する。
【背景技術】
【0002】
時系列画像に撮像された移動物体を、その画像上で追跡する追跡方法及び装置が、特許文献1に開示されている。特許文献1に開示された装置は、交差点などの定点から時系列画像を撮像し、撮像された移動物体を時系列画像上で追跡する。定点から撮像した時系列画像では背景がほとんど動かないため、特許文献1に開示された装置は、時系列画像に撮像された移動物体を検出することができた。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−207786号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、時系列画像を撮像する撮像装置が、例えば、走行する車両に搭載された場合、その車両から撮像された時系列画像の背景は、走行する車両の速度に応じて水平方向に流れてしまう。このため、物体検出装置は、走行する車両から撮像された時系列画像に撮像された物体を、精度良く検出することができないという問題があった。
【0005】
本発明は、前記の点に鑑みてなされたものであり、走行する車両等から撮像された時系列画像に撮像された物体を、精度良く検出することができる物体検出装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上記の課題を解決するためになされたものであり、物体が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部と、該画像を水平方向及び垂直方向に区分するブロック毎に、水平方向及び垂直方向の少なくとも一方の方向成分について、動きベクトルを算出する動きベクトル算出部と、前記動きベクトルが表す動き量を前記ブロック毎に算出する動き量算出部と、前記動き量が算出された前記方向成分について、該動き量の回帰直線を算出する回帰直線算出部と、前記動きベクトル算出部が水平方向及び垂直方向のいずれかの方向成分についてのみ動きベクトルを算出した場合、前記動き量と前記回帰直線との差分の絶対値である動き量差分を前記ブロック毎に算出し、一方、前記動きベクトル算出部が水平方向及び垂直方向の両方の方向成分について動きベクトルを算出した場合、前記動き量と前記回帰直線との水平方向の差分の絶対値と、前記動き量と前記回帰直線との垂直方向の差分の絶対値と、を合計した値である動き量差分を前記ブロック毎に算出する動き量差分算出部と、前記動き量差分が第1閾値以上であるか否かを前記ブロック毎に判定し、前記動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、前記動き量が算出された前記方向成分の方向に前記回帰直線が表す動き量だけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する画素値差分算出部と、前記画素値差分が第2閾値以下であるか否かを判定し、前記画素値差分が第2閾値以下である場合、該ブロックの前記動き量を、前記回帰直線が表す動き量に修正する動き量修正部と、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上であるか否かを前記ブロック毎に判定し、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上である前記ブロックを、前記画像から検出するブロック検出部と、前記ブロック検出部が検出した前記ブロックが互いに隣接している領域を前記画像から抽出し、抽出した該領域を表す分布情報を出力する領域出力部と、前記領域出力部から前記分布情報と、前記画像取得部から前記画像と、を取得し、時間軸方向における該画像のテクスチャの相関と、時間軸方向における該画像の画素値の相関と、空間軸方向における該画像の画素値の相関と、前記動きベクトル算出部が算出した前記動きベクトルの相関とのうち少なくとも1つに基づいて、前記領域出力部から取得した前記分布情報が表す前記領域を前記物体毎に分割することにより、該領域に撮像された前記物体を検出する領域分割部と、を備えることを特徴とする物体検出装置である。
【0007】
また、本発明は、前記領域分割部が分割した前記領域の形状を、前記領域出力部が出力した前記分布情報が表す前記領域の形状に修正する領域修正部を備えることを特徴とする物体検出装置である。
【0008】
また、本発明は、前記領域出力部が出力した分布情報と、前記領域分割部が分割する前記領域の分布情報とを比較し、前記領域出力部が出力した前記分布情報と、前記領域分割部が分割する前記領域の分布情報とが異なる場合、前記領域出力部が出力した前記分布情報を、新たな領域の分布情報として前記領域分割部に出力する領域生成部を備えることを特徴とする物体検出装置である。
【0009】
また、本発明は、前記領域分割部が、隣接する前記ブロック同士の前記動きベクトルの類似性が高くなるように前記動きベクトルを最適化し、該最適化した動きベクトルを前記動きベクトル算出部に出力し、前記動きベクトル算出部が、前記領域分割部が最適化した動きベクトルに基づいて、ブロックマッチング法により動きベクトルを算出することを特徴とする物体検出装置である。
【0010】
また、本発明は、人が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部と、前記画像取得部から前記画像を取得し、時間軸方向における該画像のテクスチャの相関と、時間軸方向における該画像の画素値の相関と、空間軸方向における該画像の画素値の相関と、前記動きベクトル算出部が算出した前記動きベクトルの相関とのうち、少なくとも1つに基づいて、該画像に含まれる領域を分割する領域分割部と、HOG特徴量に基づいて、前記人が撮像されている領域を該画像内で探索し、該領域を表す分布情報を出力する領域探索部と、前記領域探索部から該分布情報を取得し、取得した該分布情報に基づいて、前記人が撮像されている領域と、前記人が撮像されていない領域とに、前記領域分割部が分割した前記領域を分けることで、該領域の形状を修正する領域修正部と、を備えることを特徴とする物体検出装置である。
【0011】
また、本発明は、前記領域探索部が、前記画像において前記人が撮像されている領域が、他の時刻に撮像された前記画像における該領域と比較して垂直方向に短いか否かを判定し、前記領域修正部が、前記画像において前記人が撮像されている領域が、他の時刻に撮像された前記画像における該領域と比較して垂直方向に短いと前記領域探索部が判定した場合、垂直方向に長くなるように該領域の形状を修正することを特徴とする物体検出装置である。
【0012】
また、本発明は、物体が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部と、該画像を水平方向及び垂直方向に区分するブロック毎に、水平方向及び垂直方向の少なくとも一方の方向成分について、動きベクトルを算出する動きベクトル算出部と、前記動きベクトルが表す動き量を前記ブロック毎に算出する動き量算出部と、前記動き量が算出された前記方向成分について、該動き量の回帰直線を算出する回帰直線算出部と、前記動きベクトル算出部が水平方向及び垂直方向のいずれかの方向成分についてのみ動きベクトルを算出した場合、前記動き量と前記回帰直線との差分の絶対値である動き量差分を前記ブロック毎に算出し、一方、前記動きベクトル算出部が水平方向及び垂直方向の両方の方向成分について動きベクトルを算出した場合、前記動き量と前記回帰直線との水平方向の差分の絶対値と、前記動き量と前記回帰直線との垂直方向の差分の絶対値と、を合計した値である動き量差分を前記ブロック毎に算出する動き量差分算出部と、前記動き量差分が第1閾値以上であるか否かを前記ブロック毎に判定し、前記動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、前記動き量が算出された前記方向成分の方向に前記回帰直線が表す動き量だけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する画素値差分算出部と、前記画素値差分が第2閾値以下であるか否かを判定し、前記画素値差分が第2閾値以下である場合、該ブロックの前記動き量を、前記回帰直線が表す動き量に修正する動き量修正部と、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上であるか否かを前記ブロック毎に判定し、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上である前記ブロックを、前記画像から検出するブロック検出部と、前記ブロック検出部が検出した前記ブロックが互いに隣接している領域を前記画像から抽出することにより、抽出した該領域に撮像された前記物体を検出する領域出力部と、を備えることを特徴とする物体検出装置である。
【発明の効果】
【0013】
本発明によれば、物体検出装置は、走行する車両等から撮像された時系列画像に撮像された物体を、回帰直線により最適化された動き量に基づいて検出するので、撮像された物体を精度良く検出することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態における、物体検出装置の構成を示すブロック図である。
【図2】本発明の一実施形態における、撮像された画像と、動き量と、最適化された動き量との関係を表す図である。
【図3】本発明の一実施形態における、撮像された画像と、最適化された動き量と、最適化された回帰直線回帰直線との関係を表す図である。
【図4】本発明の一実施形態における、モーション・クラスタリングの結果の例を表す図である。
【図5】本発明の一実施形態における、時間軸方向のテクスチャ相関の例を表す図である。
【図6】本発明の一実施形態における、時間軸方向の領域相関の例を表す図である。
【図7】本発明の一実施形態における、空間軸方向の隣接相関の例を表す図である。
【図8】本発明の一実施形態における、空間軸方向の動きベクトル相関の例を表す図である。
【図9】本発明の一実施形態における、時空間MRFモデルによる検出結果の例を表す図である。
【図10】本発明の一実施形態における、スプリット判定前の検出結果の例を表す図である。
【図11】本発明の一実施形態における、スプリット判定に基づく領域分割の例を表す図である。
【図12】本発明の一実施形態における、スプリット判定後の検出結果の例を表す図である。
【図13】本発明の一実施形態における、歩行者の脚の動きが、背景の動きに同期した場合の検出結果の例を表す図である。
【図14】本発明の一実施形態における、歩行者の脚の動きが、背景の動きに同期した場合のオブジェクトマップの例を表す図である。
【図15】本発明の一実施形態における、歩行者の脚が撮像された領域を構成するブロックに、ラベルが改めて付与されたオブジェクトマップの例を表す図である。
【図16】本発明の一実施形態における、歩行者の脚が撮像された領域を構成するブロックに、ラベルが改めて付与された場合の検出結果の例を表す図である。
【発明を実施するための形態】
【0015】
本発明の一実施形態について図面を参照して詳細に説明する。図1には、物体検出装置の構成が、ブロック図で表されている。物体検出装置100は、走行する車両等から撮像された時系列画像に撮像された前景(例えば、人、物体)を検出する。物体検出装置100は、画像取得部110と、領域抽出部120と、領域生成部130と、領域分割部140と、領域修正部150と、画像表示部160と、領域探索部170とを備える。
【0016】
画像取得部110は、背景と前景とが撮像された画像であって、撮像された時刻が異なる複数の画像(時系列画像)を取得し、取得した時系列画像を、領域抽出部120と領域分割部140と領域探索部170とに出力する。
【0017】
領域抽出部120には、画像取得部110から時系列画像が入力される。領域抽出部120は、前景が撮像された領域を時系列画像から抽出し、抽出した領域を表す分布情報(例えば、画像における座標)を、領域生成部130を介して領域分割部140に出力する。領域抽出部120は、動きベクトル算出部121と、動き量算出部122と、回帰直線算出部123と、動き量差分算出部124と、画素値差分算出部125と、動き量修正部126と、ブロック検出部127と、領域出力部128とを備える。
【0018】
動きベクトル算出部121は、画像を水平方向(x成分)及び垂直方向(y成分)に区分するブロック(例えば、8×8画素)毎に、水平方向及び垂直方向の少なくとも一方の方向成分について、時系列画像における動きベクトルM(x,y)を算出する。ここで、(x,y)は、動きベクトルMが算出されたブロックのx座標及びy座標を表す。
【0019】
動きベクトル算出部121は、例えば、ブロックマッチング法により、動きベクトルをブロック毎に算出する。ここで、動きベクトル算出部121は、垂直方向よりも水平方向により広い範囲(例えば、水平方向に±24画素、垂直方向に±5画素の範囲)で、動きベクトルを画素単位で算出する。車両が水平方向に走行することで背景が水平方向に流れるので、動きベクトル算出部121は、垂直方向よりも水平方向により広い範囲で動きベクトルを算出すれば、動きベクトルを安定的に算出することができる。また、垂直方向に±5画素の範囲で動きベクトルが算出されているので、動きベクトル算出部121は、撮像装置が上下振動した場合でも、その影響を吸収して動きベクトルを安定的に算出することができる。
【0020】
ここで、動きベクトル算出部121が、水平方向及び垂直方向のいずれかの方向成分についてのみ動きベクトルを算出するか、又は、水平方向及び垂直方向の両方の方向成分について動きベクトルを算出するかについては、適宜選択されてよい。例えば、撮像装置の上下振動が少ない場合であれば、動きベクトル算出部121は、水平方向の成分についてのみ動きベクトルを算出するとしてもよい。
【0021】
動き量算出部122は、動きベクトル算出部121が算出した動きベクトルが表す動き量Mを、ブロック毎に算出する。
回帰直線算出部123は、動き量算出部122により動き量Mが算出された方向成分について、動き量の回帰直線Lを算出する。ここで、動き量Mは、全てのxにおいて回帰直線Lの近傍値を採るものと仮定される。
【0022】
動き量差分算出部124は、動きベクトル算出部121が水平方向及び垂直方向のいずれかの方向成分についてのみ動きベクトルを算出した場合、動き量Mと回帰直線Lとの差分の絶対値である動き量差分を、ブロック毎に算出する。一方、動き量差分算出部124は、動きベクトル算出部121が水平方向及び垂直方向の両方の方向成分について動きベクトルを算出した場合、動き量Mと回帰直線Lとの水平方向の差分の絶対値と、動き量Mと回帰直線Lとの垂直方向の差分の絶対値と、を合計した値である動き量差分を、ブロック毎に算出する。
【0023】
画素値差分算出部125は、動き量差分算出部124により算出された動き量差分が、予め定められた第1閾値以上であるか否かをブロック毎に判定し、動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、動き量Mが算出された方向成分の方向に回帰直線Lが表す動き量Mだけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する。
【0024】
動き量修正部126は、動き量Mを修正し、ブロック毎に最適化する。ここで、動き量修正部126は、画素値差分算出部125により算出された画素値差分が、予め定められた第2閾値以下であるか否かを判定し、画素値差分が第2閾値以下である場合、該ブロックの動き量Mを、回帰直線Lが表す動き量に修正する。これにより、動き量修正部126は、背景のテクスチャが複雑又は繰り返しパターンで個性化されている場合でも、動き量Mを最適化することができる。具体的には、以下のアルゴリズムにより、動き量Mが最適化される。
【0025】
まず、動きベクトルの水平方向の成分(x成分であるスカラー量)のみが算出された場合における、動き量Mを最適化するアルゴリズムについて説明する。
図2には、撮像された画像と、動き量と、最適化された動き量との関係が表されている。図2に示された画像は、走行する車両から撮像された時系列画像を構成する1画像フレームである。図2では、画像フレームに、歩行者A、歩行者B、及び壁の窪みが撮像されている。ここで、画像フレームに、水平方向に並ぶ複数のブロックにより構成されるマッチングラインを定める。マッチングラインのy座標を定数(図2では、y1)として、このマッチングラインにおける動き量をM(x)と表記する。
【0026】
動き量算出部122は、マッチングラインを構成する全てのブロックについて、ブロックマッチングにより算出された動きベクトルが表す動き量M(x)を算出する(ステップS1)。
回帰直線算出部123は、動き量Mが算出された方向成分(x成分)について、最小二乗法により、動き量の回帰直線L(x)を算出する(ステップS2)。
【0027】
動き量差分算出部124は、動き量Mと回帰直線Lとの差分の絶対値である動き量差分を、ブロック毎に算出する。また、画素値差分算出部125は、動き量差分算出部124により算出された動き量差分が、予め定められた第1閾値以上であるか否かをブロック毎に判定する。また、画素値差分算出部125は、動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、動き量Mを算出した方向成分の方向に回帰直線Lが表す動き量Mだけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する。そして、動き量修正部126は、画素値差分算出部125により算出された画素値差分が、予め定められた第2閾値以下であるか否かを判定し、画素値差分が第2閾値以下である場合、該ブロックの動き量M(x)を、回帰直線Lが表す最適化された動き量Mopt(x)に修正する。
【0028】
一方、動き量差分算出部124により算出された動き量差分が、予め定められた第1閾値未満である場合、最適化された動き量Mopt(x)として、動き量M(x)が採用される(ステップS3)。
【0029】
ステップS3において、動き量M(x)が修正された場合、領域抽出部120の処理は、ステップS2に戻る。一方、動き量M(x)が修正されなかった場合、領域抽出部120は、最適化された動き量Mopt(x)として、動き量M(x)を採用する。さらに、動き量修正部126は、最適化された回帰直線Lopt(x)として、回帰直線L(x)を採用する(ステップS4)。
このようにして、最適化された動き量Mopt(x)と、最適化された回帰直線Loptとが算出される。
【0030】
図3には、撮像された画像と、最適化された動き量と、最適化された回帰直線との関係が表されている。ここで、マッチングラインのy座標を定数(図3では、y2)として、最適化された動き量をMopt(x)と表記する。動き量M(x)におけるエラーが修正されたことで、最適化された動き量Mopt(x)が直線状に分布していることが、図3に示されている。また、最適化された動き量Mopt(x)と、最適化された回帰直線Lopt(x)との差分の絶対値が大きいブロックには、前景(オブジェクト)である歩行者A、歩行者B、及び壁の窪みが、それぞれ撮像されていることが判る。
【0031】
次に、水平方向及び垂直方向の両方の方向成分(x成分及びy成分)について動きベクトルが算出された場合における、動き量Mを最適化するアルゴリズムについて説明する。
動きベクトル算出部121は、動きベクトルM(x,y)=(Mh(x,y),Mv(x,y))を、画像における全てのブロックについて算出する(ステップSa1)。ここで、Mhは、動きベクトルの水平成分(動き量)である。また、Mvは、動きベクトルの垂直成分(動き量)である。
【0032】
回帰直線算出部123は、動き量Mhを算出した方向成分(x成分)について、最小二乗法により、動きベクトルの水平成分である動き量Mh(x,y)の回帰直線Lh(x,Y)を算出する。また、回帰直線算出部123は、動き量Mvを算出した方向成分(y成分)についても、最小二乗法により、動きベクトルの垂直成分である動き量Mv(x,y)の回帰直線Lv(X,y)を算出する(ステップSa2)。
【0033】
動き量差分算出部124は、動き量Mh(x,y)と回帰直線Lh(x,Y)との水平方向の差分の絶対値|Mh(x,y)−Lh(x,Y)|と、動き量Mv(x,y)と回帰直線Lv(X,y)との垂直方向の差分の絶対値|Mv(x,y)−Lv(X,y)|と、を合計した値である動き量差分|Mh(x,y)−Lh(x,Y)|+|Mv(x,y)−Lv(X,y)|を、全ブロックについて算出する。
【0034】
画素値差分算出部125は、動き量差分算出部124により算出された動き量差分|Mh(x,y)−Lh(x,Y)|+|Mv(x,y)−Lv(X,y)|が、予め定められた第1閾値以上であるか否かをブロック毎に判定する。動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、動き量Mを算出した方向成分(x成分及びy成分)のそれぞれの方向に、回帰直線Lhが表す動き量Mh及び回帰直線Lvが表す動き量Mvだけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する。また、動き量修正部126は、画素値差分算出部125により算出された画素値差分が、予め定められた第2閾値以下であるか否かを判定し、画素値差分が第2閾値以下である場合、該ブロックの動きベクトルM(x,y)、すなわち、該ブロックのx方向及びy方向への動き量を、回帰直線Lが表す動きベクトル(Lh(x,Y),Lv(X,y))に修正する。
【0035】
一方、動き量差分算出部124により算出された動き量差分が、予め定められた第1閾値未満である場合、最適化された動きベクトルMopt(x,y)として、(Mh(x,y),Mv(x,y))が採用される(ステップSa3)。
【0036】
ステップSa3において、動きベクトルM(x,y)が修正された場合、領域抽出部120の処理は、ステップS2に戻る。一方、領域抽出部120は、動きベクトルM(x,y)が修正されなかった場合、最適化された動きベクトルMopt(x,y)として、動きベクトルM(x,y)を採用する。さらに、動き量修正部126は、最適化された回帰直線Lhopt(x,Y)として、回帰直線Lh(x,Y)を採用する。また、動き量修正部126は、最適化された回帰直線Lvopt(X,y)として、回帰直線Lv(X,y)を採用する(ステップS4)。
このようにして、最適化された動きベクトルMopt(x,y)と、最適化された回帰直線Lhopt(x,Y)と、最適化された回帰直線Lvopt(X,y)とが算出される。
【0037】
ブロック検出部127は、最適化された動き量Moptと最適化された回帰直線Loptとの差分の絶対値が、予め定められた第3閾値以上であるか否かをブロック毎に判定し、最適化された動き量Moptと最適化された回帰直線Loptとの差分の絶対値が第3閾値以上であるブロックを、画像から検出する。
【0038】
領域出力部128は、ブロック検出部127が検出したブロックが互いに隣接している領域を画像から抽出し(モーション・クラスタリング)、抽出した該領域(クラスタ)を表す分布情報を、領域分割部140及び画像表示部160に出力する。ここで、領域出力部128は、物体(オブジェクト)が撮像された領域(ROI:Region of Interest)毎に、その物体に固有のラベル(物体ID)を付与し、付与したラベルを分布情報に対応付けて領域分割部140に出力する。
【0039】
図4には、モーション・クラスタリングの結果の例が表されている。図4において、背景と異なる色で表示されている領域(クラスタ)は、領域抽出部120により抽出された領域であり、背景の動き量とは異なる動き量のブロックが、互いに隣接している領域である。
【0040】
画像表示部160は、領域抽出部120が抽出した領域を、時系列画像に重畳して表示する(図4を参照)。また、画像表示部160は、領域分割部140が領域を分割した結果(トラッキング結果)、すなわち、領域分割部140が検出した前景(例えば、物体、人)を表す領域に外接する枠を、時系列画像に重畳して表示する(後述する図9を参照)。
【0041】
領域分割部140は、画像取得部110から時系列画像を取得する。また、領域分割部140は、領域抽出部120が抽出した領域を表す分布情報と、領域毎のラベルとを、領域生成部130を介して領域抽出部120から取得する。領域分割部140は、領域を表す分布情報と、領域毎のラベルとに基づいて、オブジェクトマップ(領域分割情報)を初期化する。
【0042】
ここで、オブジェクトマップとは、画像において領域が前景(オブジェクト)毎にどのように分割されているかを表す情報マップである。オブジェクトマップでは、前景が撮像された領域を構成する各ブロックに、その前景に固有のラベルが付与されている。領域分割部140は、オブジェクトマップにおいて、取得した分布情報が表す領域を前景毎に分割することにより、その領域に撮像された前景を検出する。
【0043】
領域分割部140は、時空間MRF(Markov Random Field)モデルにより領域を分割する。ここで、領域分割部140は、時間軸方向における該画像のテクスチャの相関と、時間軸方向における該画像の画素値の相関と、空間軸方向における該画像の画素値の相関と、動きベクトルの相関とのうち少なくとも1つに基づいて、領域を分割する。
【0044】
時空間MRFモデルの概要について説明する。
まず、エネルギ関数の項Upreを表す式(1)について説明する。式(1)は、パラメータMxyk及びパラメータDxykを用いたボルツマン(Boltzmann)分布の指数部分から導かれる。
【0045】
【数1】
【0046】
ここで、パラメータDxykは、式(2)で表される。また、パラメータMxyk及びパラメータDxykの添え字xは、時刻t−1に撮像された前画像G(t−1)に対して算出されたオブジェクトマップが、X(t−1)=xであることを表す。また、パラメータMxyk及びパラメータDxykの添え字yは、時刻tに撮像された現画像G(t)に対して算出されるオブジェクトマップが、X(t)=yであることを表す。また、yの添え字kは、最適化の対象となっているブロックが、k番目のブロックCk(t)であることを表す。
【0047】
パラメータDxykは、前画像G(t−1)と現画像G(t)との間のテクスチャ相関を表す。図5には、時間軸方向のテクスチャ相関の例が表されている。テクスチャ相関は、前画像G(t−1)と現画像G(t)との局所的な動きベクトルVomk=(−vmki,−vmkj)により定まる位置関係にある画素同士について、その画素値の絶対差分和により表される。ここで、Omは、領域を構成するブロックCk(t)に付与するラベルの候補である。また、i及びjは、画像フレームにおける空間座標を表す。また、パラメータDxykが小さいほど、ラベルOmが付与された領域にブロックCk(t)が属する可能性が高いことを表す。
【0048】
パラメータMxykは、現画像G(t)に対して算出されるオブジェクトマップX(t)と、前画像G(t−1)に対して算出されたオブジェクトマップX(t−1)との領域相関を定量化するパラメータである。
【0049】
図6には、時間軸方向の領域相関の例が表されている。ブロックCk(t)に関する領域相関を評価する場合について説明する。パラメータMxykは、局所的な動きベクトルVomk=(−vmki,−vmkj)により平行移動されたブロックCk(t)と、前画像G(t−1)においてラベルOmが付与されているブロックとが重なっている範囲に含まれる領域(重なり領域)を構成する画素の数である。また、パラメータMxykが値0に近いほど、ラベルOmの付与が確からしいことを表す。
【0050】
次に、エネルギ関数の項UNを表す式(3)について説明する。
【0051】
【数2】
【0052】
ここで、パラメータNykは、現画像G(t)に対して算出されるオブジェクトマップX(t)における、同一のラベルが付与されたブロックの隣接相関を表す。パラメータNykの添え字yは、時刻tに撮像された現画像G(t)に対して算出されるオブジェクトマップが、X(t)=yであることを表す。また、yの添え字kは、最適化の対象となっているブロックが、k番目のブロックCk(t)であることを表す。
【0053】
図7には、空間軸方向の隣接相関の例が表されている。ブロックCk(t)にラベルOmが付与されている場合、パラメータNykは、ブロックCk(t)に隣接するブロックのうち、同一のラベルOmが付与されているブロックの数を表す。図7に示す例では、パラメータNyk=5である。また、パラメータNykが大きいほど、ラベルOmの付与が確からしいことを表す。
【0054】
次に、エネルギ関数の項Umvを表す式(4)について説明する。
【0055】
【数3】
【0056】
ここで、Bk(t−1)は、時刻t−1におけるブロックCk(t−1)に隣接するブロック(図7を参照)を表す。また、ベクトルVCk(t−1)は、ブロックCk(t−1)からブロックCk(t)への動きベクトルである。また、ベクトルVBk(t−1)は、ブロックBk(t−1)からブロックBk(t)への動きベクトルである。また、ベクトルVCk(t−1)と、ベクトルVBk(t−1)との類似性が高いほど、ブロックCk(t−1)において算出された動きベクトルが確からしいことを表す。
【0057】
図8には、空間軸方向の動きベクトル相関の例が表されている。領域分割部140は、パラメータMxyk、及びパラメータDxykを同時に満たすことを条件として、隣接するブロック同士の動きベクトルの類似性(動きベクトル相関)が高くなるように各ブロックの動きベクトルを最適化し、式(4)により確率緩和を実行する。
【0058】
エネルギ関数は、式(1)〜(4)を用いて、式(5)により表される。
【0059】
【数4】
【0060】
ここで、U(yk)における項UM(Mxyk)及びUD(Dxyk)は、前景が撮像された領域を構成するブロックにおける局所的な動きベクトルを基に評価される。また、Umv(Ck(t−1))は、前画像G(t−1)から現画像G(t)への動きベクトルを基に評価される。これらの評価により、式(5)が最小化されることで、領域の境界(輪郭)及び動きベクトルが最適化される。すなわち、この最適化問題は、エネルギ関数の式(5)を最小化するオブジェクトマップX(t)=yを算出する問題に帰着する。
以上が、時空間MRFモデルの概要である。
【0061】
領域分割部140は、時空間MRFモデルにより領域を分割した結果(トラッキング結果)、すなわち、検出した前景(例えば、物体、人)を表す領域に外接する枠を、時系列画像に重畳させて画面に表示させる。
【0062】
ここで、領域分割部140は、時空間MRFモデルにより最適化した領域の境界及び動きベクトルを、領域抽出部120にフィードバックしてもよい(最適化ループ)。このフィードバックされた領域の境界及び動きベクトルに基づいて、領域抽出部120は、領域を抽出し、抽出した該領域を表す分布情報と、領域毎に付与したラベルとを、領域分割部140に出力する。領域分割部140は、この最適化ループにおいて、領域を分割した結果と、動きベクトルを最適化した結果とが変化しなくなった場合に、最適化ループを終わらせ、検出した前景を表す領域に外接する枠を、時系列画像に重畳して画面に表示させるとしてもよい。
【0063】
図9には、時空間MRFモデルによる検出結果の例が表されている。この例では、領域分割部140が領域を分割した結果(トラッキング結果)、すなわち、領域分割部140が検出した前景(図9では、歩行者、街路樹、ガードレールなど)を表す領域に外接する枠が、時系列画像に重畳されて画像表示部160に表示されている。
【0064】
図1に戻り、物体検出装置の構成の説明を続ける。領域生成部130は、領域抽出部120の領域出力部128が出力した分布情報を、領域分割部140に転送する。ここで、領域生成部130は、領域抽出部120の領域出力部128が出力した分布情報と、領域分割部140が分割する領域の分布情報(オブジェクトマップ)とを比較する。これらの分布情報が異なる場合、領域生成部130は、領域出力部128が出力した分布情報を、オブジェクトマップに無い新たな領域の分布情報として、領域分割部140に出力する。これにより、領域生成部130は、時系列画像に新たな前景が撮像された場合、その新たな前景が撮像された領域の分布を、領域分割部140に通知することができる。
【0065】
領域探索部170には、領域分割部140からオブジェクトマップと、画像取得部110から時系列画像とが入力される。領域探索部170は、HOG(Histograms of Oriented Gradients)特徴量に基づいて、人が撮像されている領域を該画像内で探索し、該領域を表す分布情報を領域修正部150に出力する。ここで、HOG特徴量は、時空間MRFモデルが属する物理層よりも上位にある形相(形態)層において、事象認識アルゴリズムにより画像特徴量として算出される。
【0066】
なお、領域探索部170は、人が撮像された領域の垂直方向下限の座標から、その領域の垂直方向上限の座標を推定することで、人が撮像されている領域を探索する範囲を予め限定してもよい。領域探索部170は、例えば、カメラキャリブレーションに応じて定まる領域の位置及び大きさの関係に基づいて、人が撮像されている領域を探索する範囲を予め限定してもよい。
【0067】
領域修正部150は、領域分割部140がオブジェクトマップにおいて分割した領域の形状(後述する「スプリット判定」に基づいて修正される前の形状)を、領域抽出部120の領域出力部128が出力した分布情報が表す領域の形状に修正する。ここで、領域修正部150は、領域分割部140が使用しているオブジェクトマップにおいて、領域抽出部120が抽出した領域に重なるブロックであって、同一のラベルが付与されたブロックが所定数以上である場合、領域分割部140がオブジェクトマップにおいて分割した領域の形状を、領域抽出部120の領域出力部128が出力した分布情報が表す領域の形状に修正する。これにより、領域分割部140がオブジェクトマップにおいて分割する領域の形状は、更新(リフレッシュ)される。
【0068】
<異なるオブジェクトが、画像上で近接又は重なっている(オクルージョン)場合について>
領域修正部150は、人が撮像されている領域の分布情報を領域探索部170から取得し、単一領域に複数の前景(例えば、物体、人)が撮像されていることにより、その単一領域を前景毎に分割することが可能か否かを判定する(スプリット判定)。ここで、単一領域に複数の前景が検出された場合、領域を前景毎に分割することが可能であると判定される。
【0069】
領域修正部150は、スプリット判定に基づいて、人が撮像されている領域と、人が撮像されていない領域とに、領域分割部140が分割した領域を分けることで、該領域の形状を修正する。具体的には、領域修正部150は、人が撮像されている領域を単一領域から差し引くことで、単一領域から差し引かれずに残った領域を、人が撮像されていない領域とする。
【0070】
領域修正部150は、このように修正した領域の形状(同一のラベルが付与されたブロックの分布情報)を領域分割部140に出力することにより、オブジェクトマップにおける領域の形状を修正する。
【0071】
図10には、スプリット判定前の検出結果の例が表されている。図10では、前景(ROI)として、歩行者と電柱とが撮像されている。ここで、歩行者と電柱とが画像上で近接しているために、スプリット判定前において、領域分割部140は、歩行者と電柱とが一体となった前景を単一領域(図10では、ラベル37が付与されたブロック)として検出しているものとする。
【0072】
図10における枠37は、単一領域に割り当てられたラベル37が付与されたブロックが構成する領域に外接する枠である。また、図10における枠96は、背景であることを表すラベル96が付与されたブロックが構成する領域に外接する枠である。
【0073】
図11には、スプリット判定に基づく領域分割の例が表されている。ここで、図11における空白のブロックには、背景であること表すラベル96が付与されているものとする。図11(A)には、図10においてラベル37が付与されたブロックが構成する単一領域の分布が、オブジェクトマップにより表されている。また、図11(B)には、スプリット判定に基づいて、人が撮像されている領域と、人が撮像されていない領域とに分けられた領域の分布が、スプリット判定マップにより表されている。
【0074】
スプリット判定マップにおいて、値0が付与されているブロックは、HOG特徴量により人が撮像された領域であると判定されたブロックである。また、スプリット判定マップにおいて、値1が付与されているブロックは、人が撮像されていない領域であると判定されたブロックである。このスプリット判定マップは、領域修正部150から領域分割部140に、インタフェース関数を介して入力される。
【0075】
また、図11(C)には、領域分割部140が、スプリット判定マップに基づいて、図11(A)に示した単一領域を分割した結果を表すオブジェクトマップが表されている。領域分割部140は、スプリット判定マップにおいて値0が付与されているブロックに、元のラベル(図11(C)では、ラベル37)をそのまま付与する。一方、領域分割部140は、スプリット判定マップにおいて値1が付与されているブロックに、ラベル37とは異なるラベル(図11(C)では、ラベル41)を付与する。
【0076】
図12には、スプリット判定後の検出結果の例が表されている。図12において、枠37は、図11(C)に表されたラベル37が付与されたブロックが構成する領域に外接する枠である。また、枠41は、図11(C)に表されたラベル41が付与されたブロックが構成する領域に外接する枠である。画面上で近接している歩行者及び電柱は、スプリット判定前において、単一領域として検出されていたが(図10を参照)、スプリット判定後において、歩行者(ラベル37)及び電柱(ラベル41)が、それぞれ異なる領域(オブジェクト)として検出されていることが表されている。
【0077】
<歩行者の脚の動きが、背景の動きに同期した場合について>
図13には、歩行者の脚の動きが、背景の動きに同期した場合の検出結果の例が表されている。図13(A)は、時刻t−2に撮像された画像である。また、図13(B)は、時刻t−1に撮像された画像である。また、図13(C)は、時刻tに撮像された画像である。
【0078】
走行する車両等から撮像された歩行者の脚の動きは、画像上において背景の動きと同期することがある。この場合、歩行者の脚の動き量と、背景の動き量との差が少なく、識別し難いので、歩行者の全身が撮像されている領域から、歩行者の脚が撮像されている領域のみが欠けてしまうことが起こり得る。
【0079】
ここで、時刻tに撮像された歩行者の脚の動きが、画像上において背景の動きと同期したとする。このため、図13(C)では、歩行者の脚が撮像されている領域だけ、枠37が欠けてしまっていることが表されている。
【0080】
図14には、歩行者の脚の動きが、背景の動きに同期した場合のオブジェクトマップの例が表されている。ここで、図14(A)は図13(A)に対応し、図14(B)は図13(B)に対応し、図14(C)は図13(C)に対応する。図14(A)及び(B)では領域を構成するブロックに欠けは無いが、図14(C)では、歩行者の脚が撮像されている領域を構成するブロックが欠け、歩行者が検出された領域が垂直方向に短くなっていることが表されている。
【0081】
領域探索部170は、時系列画像において人が撮像されている領域が、他の時刻に撮像された時系列画像における該領域と比較して垂直方向に短いか否かを判定し、判定結果を領域修正部150に出力する。ここで、領域探索部170は、例えば、領域分割部140が使用しているオブジェクトマップにおいて、人が撮像されている領域の垂直方向の長さの等加重平均を、時系列画像毎に算出する。さらに、領域探索部170は、その等加重平均に基づいて、時刻t−2又は時刻t−1に撮像された時系列画像における該領域と比較して、時刻tに人が撮像されている領域が垂直方向に短いか否かを判定するとしてもよい。
【0082】
また、領域探索部170は、人(歩行者)が撮像された領域であるとHOG特徴量に基づいて判定した領域において、その人の足元が撮像された位置を示す座標(垂直方向下限の座標)を推定し、推定した座標を領域修正部150に出力する。
【0083】
領域修正部150は、時系列画像において人が撮像されている領域が、他の時刻に撮像された時系列画像における該領域と比較して垂直方向に短いと領域探索部170が判定した場合、該領域が垂直方向に長くなるように、ブロックに改めてラベルを付与することで、該領域の形状を修正する。形状を修正した結果は、インタフェース関数を介して領域分割部140に通知される。
【0084】
図15には、歩行者の脚が撮像された領域を構成するブロックに、ラベルが改めて付与されたオブジェクトマップの例が表されている。図14(C)に表されたオブジェクトマップにおいてラベル37が付与されたブロックから、歩行者の足元が撮像された領域の垂直方向下限の座標にあるブロックまで、図15では、ラベル37が改めて付与され(図15における太枠内)、領域の形状が垂直方向に長くなるように修正されていることが表されている。
【0085】
図16には、歩行者の脚が撮像された領域を構成するブロックに、ラベルが改めて付与された場合の検出結果の例が表されている。歩行者の脚が撮像された領域を構成するブロックに、ラベル37が改めて付与されたことにより(図15を参照)、歩行者の足元が撮像された領域まで、枠37が垂直方向に長くなっている。
【0086】
以上のように、物体検出装置100は、物体が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部110と、該画像を水平方向及び垂直方向に区分するブロック毎に、水平方向及び垂直方向の少なくとも一方の方向成分について、動きベクトルを算出する動きベクトル算出部121と、前記動きベクトルが表す動き量を前記ブロック毎に算出する動き量算出部122と、前記動き量が算出された前記方向成分について、該動き量の回帰直線を算出する回帰直線算出部123と、動きベクトル算出部121が水平方向及び垂直方向のいずれかの方向成分についてのみ動きベクトルを算出した場合、前記動き量と前記回帰直線との差分の絶対値である動き量差分を前記ブロック毎に算出し、一方、動きベクトル算出部121が水平方向及び垂直方向の両方の方向成分について動きベクトルを算出した場合、前記動き量と前記回帰直線との水平方向の差分の絶対値と、前記動き量と前記回帰直線との垂直方向の差分の絶対値と、を合計した値である動き量差分を前記ブロック毎に算出する動き量差分算出部124と、前記動き量差分が第1閾値以上であるか否かを前記ブロック毎に判定し、前記動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、前記動き量が算出された前記方向成分の方向に前記回帰直線が表す動き量だけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する画素値差分算出部125と、前記画素値差分が第2閾値以下であるか否かを判定し、前記画素値差分が第2閾値以下である場合、前記回帰直線が表す動き量に該ブロックの前記動き量を修正する動き量修正部126と、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上であるか否かを前記ブロック毎に判定し、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上である前記ブロックを、前記画像から検出するブロック検出部127と、ブロック検出部127が検出した前記ブロックが互いに隣接している領域を前記画像から抽出し、抽出した該領域を表す分布情報を出力する領域出力部128と、領域出力部128から前記分布情報と、前記画像取得部から前記画像と、を取得し、時間軸方向における該画像のテクスチャの相関と、時間軸方向における該画像の画素値の相関と、空間軸方向における該画像の画素値の相関と、動きベクトル算出部121が算出した前記動きベクトルの相関とのうち少なくとも1つに基づいて、領域出力部128から取得した前記分布情報が表す前記領域を前記物体毎に分割することにより、該領域に撮像された前記物体を検出する領域分割部140と、を備える。
【0087】
これにより、物体検出装置は、走行する車両等から撮像された時系列画像に撮像された物体を、回帰直線により最適化された動き量に基づいて検出するので、撮像された物体を精度良く検出することができる。
【0088】
また、物体検出装置100は、領域分割部140が分割した前記領域の形状を、領域出力部128が出力した前記分布情報が表す前記領域の形状に修正する領域修正部126を備える。これにより、物体検出装置は、オブジェクトマップにおいて分割する領域の形状を、所定周期で更新(リフレッシュ)することができる。
【0089】
また、物体検出装置100は、領域出力部128が出力した分布情報と、領域分割部140が分割する前記領域の分布情報とを比較し、領域出力部128が出力した前記分布情報と、領域分割部140が分割する前記領域の分布情報とが異なる場合、領域出力部128が出力した前記分布情報を、新たな領域の分布情報として領域分割部140に出力する領域生成部130を備える。これにより、物体検出装置は、時系列画像に新たな前景が撮像された場合、その新たな前景を表す分布情報に基づいて、撮像された物体を精度良く検出することができる。
【0090】
また、物体検出装置100は、領域分割部140が、隣接するブロック同士の動きベクトルの類似性が高くなるように動きベクトルを最適化し、該最適化した動きベクトルを動き量算出部122に出力し、動き量算出部122は、領域分割部140が最適化した動きベクトルに基づいて、ブロックマッチング法により動きベクトルを算出する。
【0091】
これにより、物体検出装置は、時空間MRFモデルとブロックマッチング法とによる最適化ループにより、動きベクトルを最適化することができる。
【0092】
また、物体検出装置100は、人が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部110と、画像取得部110から前記画像を取得し、時間軸方向における該画像のテクスチャの相関と、時間軸方向における該画像の画素値の相関と、空間軸方向における該画像の画素値の相関と、動きベクトル算出部121が算出した前記動きベクトルの相関とのうち、少なくとも1つに基づいて、該画像に含まれる領域を分割する領域分割部140と、HOG特徴量に基づいて、前記人が撮像されている領域を該画像内で探索し、該領域を表す分布情報を出力する領域探索部170と、領域探索部170から該分布情報を取得し、取得した該分布情報に基づいて、前記人が撮像されている領域と、前記人が撮像されていない領域とに、領域分割部140が分割した前記領域を分けることで、該領域の形状を修正する領域修正部150と、を備える。
【0093】
これにより、物体検出装置は、走行する車両から撮像された時系列画像に撮像された人を、HOG特徴量に基づいて検出するので、撮像された人を精度良く検出することができる。
【0094】
また、物体検出装置は、領域探索部170が、画像取得部110が取得した前記画像において、前記人が撮像されている領域が、他の画像と比較して垂直方向に短いか否かを判定し、領域修正部150が、前記人が撮像されている領域が他の画像と比較して垂直方向に短いと領域探索部170が判定した場合、垂直方向に長くなるように該領域の形状を修正する。
【0095】
これにより、物体検出装置は、撮像された歩行者の脚の動きと背景の動きとが同期した場合でも、その歩行者の全身を検出することができる。
【0096】
また、物体検出装置100は、物体が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部110と、該画像を水平方向及び垂直方向に区分するブロック毎に、水平方向及び垂直方向の少なくとも一方の方向成分について、動きベクトルを算出する動きベクトル算出部121と、前記動きベクトルが表す動き量を前記ブロック毎に算出する動き量算出部122と、前記動き量が算出された前記方向成分について、該動き量の回帰直線を算出する回帰直線算出部123と、動きベクトル算出部121が水平方向及び垂直方向のいずれかの方向成分についてのみ動きベクトルを算出した場合、前記動き量と前記回帰直線との差分の絶対値である動き量差分を前記ブロック毎に算出し、一方、動きベクトル算出部121が水平方向及び垂直方向の両方の方向成分について動きベクトルを算出した場合、前記動き量と前記回帰直線との水平方向の差分の絶対値と、前記動き量と前記回帰直線との垂直方向の差分の絶対値と、を合計した値である動き量差分を前記ブロック毎に算出する動き量差分算出部124と、前記動き量差分が第1閾値以上であるか否かを前記ブロック毎に判定し、前記動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、前記動き量が算出された前記方向成分の方向に前記回帰直線が表す動き量だけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する画素値差分算出部125と、前記画素値差分が第2閾値以下であるか否かを判定し、前記画素値差分が第2閾値以下である場合、前記回帰直線が表す動き量に該ブロックの前記動き量を修正する動き量修正部126と、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上であるか否かを前記ブロック毎に判定し、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上である前記ブロックを、前記画像から検出するブロック検出部127と、ブロック検出部127が検出した前記ブロックが互いに隣接している領域を前記画像から抽出することにより、抽出した該領域に撮像された前記物体を検出する領域出力部128と、を備える。
【0097】
以上、この発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【0098】
なお、以上に説明した物体検出装置を実現するためのプログラムを、コンピュータ読み取り可能な記録媒体に記録し、そのプログラムをコンピュータシステムに読み込ませて実行するようにしてもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムが送信された場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリ(RAM)のように、一定時間プログラムを保持しているものも含むものとする。また、上記プログラムは、このプログラムを記憶装置等に格納したコンピュータシステムから、伝送媒体を介して、あるいは、伝送媒体中の伝送波により他のコンピュータシステムに伝送されてもよい。ここで、プログラムを伝送する「伝送媒体」は、インターネット等のネットワーク(通信網)や電話回線等の通信回線(通信線)のように情報を伝送する機能を有する媒体のことをいう。また、上記プログラムは、前述した機能の一部を実現するためのものであってもよい。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であってもよい。
【符号の説明】
【0099】
100…物体検出装置、110…画像取得部、120…領域抽出部、121…動きベクトル算出部、122…動き量算出部、123…回帰直線算出部、124…動き量差分算出部、125…画素値差分算出部、126…動き量修正部、127…ブロック検出部、128…領域出力部、130…領域生成部、140…領域分割部、150…領域修正部、160…画像表示部、170…領域探索部
【特許請求の範囲】
【請求項1】
物体が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部と、
該画像を水平方向及び垂直方向に区分するブロック毎に、水平方向及び垂直方向の少なくとも一方の方向成分について、動きベクトルを算出する動きベクトル算出部と、
前記動きベクトルが表す動き量を前記ブロック毎に算出する動き量算出部と、
前記動き量が算出された前記方向成分について、該動き量の回帰直線を算出する回帰直線算出部と、
前記動きベクトル算出部が水平方向及び垂直方向のいずれかの方向成分についてのみ動きベクトルを算出した場合、前記動き量と前記回帰直線との差分の絶対値である動き量差分を前記ブロック毎に算出し、一方、前記動きベクトル算出部が水平方向及び垂直方向の両方の方向成分について動きベクトルを算出した場合、前記動き量と前記回帰直線との水平方向の差分の絶対値と、前記動き量と前記回帰直線との垂直方向の差分の絶対値と、を合計した値である動き量差分を前記ブロック毎に算出する動き量差分算出部と、
前記動き量差分が第1閾値以上であるか否かを前記ブロック毎に判定し、前記動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、前記動き量が算出された前記方向成分の方向に前記回帰直線が表す動き量だけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する画素値差分算出部と、
前記画素値差分が第2閾値以下であるか否かを判定し、前記画素値差分が第2閾値以下である場合、該ブロックの前記動き量を、前記回帰直線が表す動き量に修正する動き量修正部と、
前記動き量と前記回帰直線との差分の絶対値が第3閾値以上であるか否かを前記ブロック毎に判定し、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上である前記ブロックを、前記画像から検出するブロック検出部と、
前記ブロック検出部が検出した前記ブロックが互いに隣接している領域を前記画像から抽出し、抽出した該領域を表す分布情報を出力する領域出力部と、
前記領域出力部から前記分布情報と、前記画像取得部から前記画像と、を取得し、時間軸方向における該画像のテクスチャの相関と、時間軸方向における該画像の画素値の相関と、空間軸方向における該画像の画素値の相関と、前記動きベクトル算出部が算出した前記動きベクトルの相関とのうち少なくとも1つに基づいて、前記領域出力部から取得した前記分布情報が表す前記領域を前記物体毎に分割することにより、該領域に撮像された前記物体を検出する領域分割部と、
を備えることを特徴とする物体検出装置。
【請求項2】
前記領域分割部が分割した前記領域の形状を、前記領域出力部が出力した前記分布情報が表す前記領域の形状に修正する領域修正部
を備えることを特徴とする請求項1に記載の物体検出装置。
【請求項3】
前記領域出力部が出力した分布情報と、前記領域分割部が分割する前記領域の分布情報とを比較し、前記領域出力部が出力した前記分布情報と、前記領域分割部が分割する前記領域の分布情報とが異なる場合、前記領域出力部が出力した前記分布情報を、新たな領域の分布情報として前記領域分割部に出力する領域生成部
を備えることを特徴とする請求項1又は請求項2に記載の物体検出装置。
【請求項4】
前記領域分割部は、隣接する前記ブロック同士の前記動きベクトルの類似性が高くなるように前記動きベクトルを最適化し、該最適化した動きベクトルを前記動きベクトル算出部に出力し、
前記動きベクトル算出部は、前記領域分割部が最適化した動きベクトルに基づいて、ブロックマッチング法により動きベクトルを算出することを特徴とする請求項1から請求項3のいずれか1つに記載の物体検出装置。
【請求項5】
人が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部と、
前記画像取得部から前記画像を取得し、時間軸方向における該画像のテクスチャの相関と、時間軸方向における該画像の画素値の相関と、空間軸方向における該画像の画素値の相関と、前記動きベクトル算出部が算出した前記動きベクトルの相関とのうち、少なくとも1つに基づいて、該画像に含まれる領域を分割する領域分割部と、
HOG特徴量に基づいて、前記人が撮像されている領域を該画像内で探索し、該領域を表す分布情報を出力する領域探索部と、
前記領域探索部から該分布情報を取得し、取得した該分布情報に基づいて、前記人が撮像されている領域と、前記人が撮像されていない領域とに、前記領域分割部が分割した前記領域を分けることで、該領域の形状を修正する領域修正部と、
を備えることを特徴とする物体検出装置。
【請求項6】
前記領域探索部は、前記画像において前記人が撮像されている領域が、他の時刻に撮像された前記画像における該領域と比較して垂直方向に短いか否かを判定し、
前記領域修正部は、前記画像において前記人が撮像されている領域が、他の時刻に撮像された前記画像における該領域と比較して垂直方向に短いと前記領域探索部が判定した場合、垂直方向に長くなるように該領域の形状を修正することを特徴とする請求項5に記載の物体検出装置。
【請求項7】
物体が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部と、
該画像を水平方向及び垂直方向に区分するブロック毎に、水平方向及び垂直方向の少なくとも一方の方向成分について、動きベクトルを算出する動きベクトル算出部と、
前記動きベクトルが表す動き量を前記ブロック毎に算出する動き量算出部と、
前記動き量が算出された前記方向成分について、該動き量の回帰直線を算出する回帰直線算出部と、
前記動きベクトル算出部が水平方向及び垂直方向のいずれかの方向成分についてのみ動きベクトルを算出した場合、前記動き量と前記回帰直線との差分の絶対値である動き量差分を前記ブロック毎に算出し、一方、前記動きベクトル算出部が水平方向及び垂直方向の両方の方向成分について動きベクトルを算出した場合、前記動き量と前記回帰直線との水平方向の差分の絶対値と、前記動き量と前記回帰直線との垂直方向の差分の絶対値と、を合計した値である動き量差分を前記ブロック毎に算出する動き量差分算出部と、
前記動き量差分が第1閾値以上であるか否かを前記ブロック毎に判定し、前記動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、前記動き量が算出された前記方向成分の方向に前記回帰直線が表す動き量だけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する画素値差分算出部と、
前記画素値差分が第2閾値以下であるか否かを判定し、前記画素値差分が第2閾値以下である場合、該ブロックの前記動き量を、前記回帰直線が表す動き量に修正する動き量修正部と、
前記動き量と前記回帰直線との差分の絶対値が第3閾値以上であるか否かを前記ブロック毎に判定し、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上である前記ブロックを、前記画像から検出するブロック検出部と、
前記ブロック検出部が検出した前記ブロックが互いに隣接している領域を前記画像から抽出することにより、抽出した該領域に撮像された前記物体を検出する領域出力部と、
を備えることを特徴とする物体検出装置。
【請求項1】
物体が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部と、
該画像を水平方向及び垂直方向に区分するブロック毎に、水平方向及び垂直方向の少なくとも一方の方向成分について、動きベクトルを算出する動きベクトル算出部と、
前記動きベクトルが表す動き量を前記ブロック毎に算出する動き量算出部と、
前記動き量が算出された前記方向成分について、該動き量の回帰直線を算出する回帰直線算出部と、
前記動きベクトル算出部が水平方向及び垂直方向のいずれかの方向成分についてのみ動きベクトルを算出した場合、前記動き量と前記回帰直線との差分の絶対値である動き量差分を前記ブロック毎に算出し、一方、前記動きベクトル算出部が水平方向及び垂直方向の両方の方向成分について動きベクトルを算出した場合、前記動き量と前記回帰直線との水平方向の差分の絶対値と、前記動き量と前記回帰直線との垂直方向の差分の絶対値と、を合計した値である動き量差分を前記ブロック毎に算出する動き量差分算出部と、
前記動き量差分が第1閾値以上であるか否かを前記ブロック毎に判定し、前記動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、前記動き量が算出された前記方向成分の方向に前記回帰直線が表す動き量だけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する画素値差分算出部と、
前記画素値差分が第2閾値以下であるか否かを判定し、前記画素値差分が第2閾値以下である場合、該ブロックの前記動き量を、前記回帰直線が表す動き量に修正する動き量修正部と、
前記動き量と前記回帰直線との差分の絶対値が第3閾値以上であるか否かを前記ブロック毎に判定し、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上である前記ブロックを、前記画像から検出するブロック検出部と、
前記ブロック検出部が検出した前記ブロックが互いに隣接している領域を前記画像から抽出し、抽出した該領域を表す分布情報を出力する領域出力部と、
前記領域出力部から前記分布情報と、前記画像取得部から前記画像と、を取得し、時間軸方向における該画像のテクスチャの相関と、時間軸方向における該画像の画素値の相関と、空間軸方向における該画像の画素値の相関と、前記動きベクトル算出部が算出した前記動きベクトルの相関とのうち少なくとも1つに基づいて、前記領域出力部から取得した前記分布情報が表す前記領域を前記物体毎に分割することにより、該領域に撮像された前記物体を検出する領域分割部と、
を備えることを特徴とする物体検出装置。
【請求項2】
前記領域分割部が分割した前記領域の形状を、前記領域出力部が出力した前記分布情報が表す前記領域の形状に修正する領域修正部
を備えることを特徴とする請求項1に記載の物体検出装置。
【請求項3】
前記領域出力部が出力した分布情報と、前記領域分割部が分割する前記領域の分布情報とを比較し、前記領域出力部が出力した前記分布情報と、前記領域分割部が分割する前記領域の分布情報とが異なる場合、前記領域出力部が出力した前記分布情報を、新たな領域の分布情報として前記領域分割部に出力する領域生成部
を備えることを特徴とする請求項1又は請求項2に記載の物体検出装置。
【請求項4】
前記領域分割部は、隣接する前記ブロック同士の前記動きベクトルの類似性が高くなるように前記動きベクトルを最適化し、該最適化した動きベクトルを前記動きベクトル算出部に出力し、
前記動きベクトル算出部は、前記領域分割部が最適化した動きベクトルに基づいて、ブロックマッチング法により動きベクトルを算出することを特徴とする請求項1から請求項3のいずれか1つに記載の物体検出装置。
【請求項5】
人が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部と、
前記画像取得部から前記画像を取得し、時間軸方向における該画像のテクスチャの相関と、時間軸方向における該画像の画素値の相関と、空間軸方向における該画像の画素値の相関と、前記動きベクトル算出部が算出した前記動きベクトルの相関とのうち、少なくとも1つに基づいて、該画像に含まれる領域を分割する領域分割部と、
HOG特徴量に基づいて、前記人が撮像されている領域を該画像内で探索し、該領域を表す分布情報を出力する領域探索部と、
前記領域探索部から該分布情報を取得し、取得した該分布情報に基づいて、前記人が撮像されている領域と、前記人が撮像されていない領域とに、前記領域分割部が分割した前記領域を分けることで、該領域の形状を修正する領域修正部と、
を備えることを特徴とする物体検出装置。
【請求項6】
前記領域探索部は、前記画像において前記人が撮像されている領域が、他の時刻に撮像された前記画像における該領域と比較して垂直方向に短いか否かを判定し、
前記領域修正部は、前記画像において前記人が撮像されている領域が、他の時刻に撮像された前記画像における該領域と比較して垂直方向に短いと前記領域探索部が判定した場合、垂直方向に長くなるように該領域の形状を修正することを特徴とする請求項5に記載の物体検出装置。
【請求項7】
物体が撮像された画像であって、撮像された時刻が異なる複数の該画像を取得する画像取得部と、
該画像を水平方向及び垂直方向に区分するブロック毎に、水平方向及び垂直方向の少なくとも一方の方向成分について、動きベクトルを算出する動きベクトル算出部と、
前記動きベクトルが表す動き量を前記ブロック毎に算出する動き量算出部と、
前記動き量が算出された前記方向成分について、該動き量の回帰直線を算出する回帰直線算出部と、
前記動きベクトル算出部が水平方向及び垂直方向のいずれかの方向成分についてのみ動きベクトルを算出した場合、前記動き量と前記回帰直線との差分の絶対値である動き量差分を前記ブロック毎に算出し、一方、前記動きベクトル算出部が水平方向及び垂直方向の両方の方向成分について動きベクトルを算出した場合、前記動き量と前記回帰直線との水平方向の差分の絶対値と、前記動き量と前記回帰直線との垂直方向の差分の絶対値と、を合計した値である動き量差分を前記ブロック毎に算出する動き量差分算出部と、
前記動き量差分が第1閾値以上であるか否かを前記ブロック毎に判定し、前記動き量差分が第1閾値以上である場合、該ブロックを構成する画素の画素値の合計と、前記動き量が算出された前記方向成分の方向に前記回帰直線が表す動き量だけ該ブロックを移動させた位置に在る画素の画素値の合計と、の差分の絶対値である画素値差分を算出する画素値差分算出部と、
前記画素値差分が第2閾値以下であるか否かを判定し、前記画素値差分が第2閾値以下である場合、該ブロックの前記動き量を、前記回帰直線が表す動き量に修正する動き量修正部と、
前記動き量と前記回帰直線との差分の絶対値が第3閾値以上であるか否かを前記ブロック毎に判定し、前記動き量と前記回帰直線との差分の絶対値が第3閾値以上である前記ブロックを、前記画像から検出するブロック検出部と、
前記ブロック検出部が検出した前記ブロックが互いに隣接している領域を前記画像から抽出することにより、抽出した該領域に撮像された前記物体を検出する領域出力部と、
を備えることを特徴とする物体検出装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−84056(P2012−84056A)
【公開日】平成24年4月26日(2012.4.26)
【国際特許分類】
【出願番号】特願2010−231565(P2010−231565)
【出願日】平成22年10月14日(2010.10.14)
【出願人】(801000049)財団法人生産技術研究奨励会 (72)
【Fターム(参考)】
【公開日】平成24年4月26日(2012.4.26)
【国際特許分類】
【出願日】平成22年10月14日(2010.10.14)
【出願人】(801000049)財団法人生産技術研究奨励会 (72)
【Fターム(参考)】
[ Back to top ]