
物体検出装置
【課題】歩行者のようなレーダの送信信号に対する低反射物体であってもレーダにより確実に検出することができる物体検出装置を提供する。
【解決手段】車両に搭載されたカメラ100によって撮像された画像に基づいて物体40の種類を判定する物体種類判定部102と、車両に搭載された電磁波を送信するレーダ20の受信信号に基づいて物体40に関する情報を検出するレーダ物体検出部211と、前記レーダ20を制御するレーダ制御部200とを備え、レーダ制御部200は、物体種類判定部102が判定した物体40の種類に応じて、レーダ20の距離分解能と、速度分解能と、角度分解能と、送信電力と、受信ゲインと、送信アンテナの種類の切り替えと、のうちの少なくとも一つを制御する。
【解決手段】車両に搭載されたカメラ100によって撮像された画像に基づいて物体40の種類を判定する物体種類判定部102と、車両に搭載された電磁波を送信するレーダ20の受信信号に基づいて物体40に関する情報を検出するレーダ物体検出部211と、前記レーダ20を制御するレーダ制御部200とを備え、レーダ制御部200は、物体種類判定部102が判定した物体40の種類に応じて、レーダ20の距離分解能と、速度分解能と、角度分解能と、送信電力と、受信ゲインと、送信アンテナの種類の切り替えと、のうちの少なくとも一つを制御する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、車両の近辺に存在する物体を検出する物体検出装置に関し、特に、歩行者のようなレーダの送信信号に対する低反射物体であっても検出することができる物体検出装置に関する。
【背景技術】
【0002】
従来から、車両に搭載されたレーダによって測定される自車と物体との相対距離、相対速度、水平方向角度、反射強度等の測定結果は、自車と自車の進行方向線上の前方車両との車間距離を一定に保つ車間距離制御システム、滞環境下で自車の進行方向線上の前方車両に追従走行を行う低車速追従走行システム、車間距離制御システムの機能を停止制御まで拡張した全車速域車間距離制御システム、自車の進行方向線上の前方車両に追突する可能性がある場合に自動的に緊急制動を行い、追突被害を軽減する衝突被害軽減ブレーキシステム等で、ドライバの運転負荷軽減、利便性向上、危険に対する注意喚起、事故回避/被害軽減等を狙った走行支援システムに活用されている。一般的にレーダは、画像センサと比べて物体との相対距離、相対速度を測定することに優れている。
【0003】
又、車両に搭載されたカメラ等の画像センサによって測定される自車の前方車線、物体の種類、自車と物体との相対距離、水平方向角度などの測定結果は、車線内の自車の走行を維持支援するように自動的に操舵を制御する車線維持支援システム、夜間走行時に前方の歩行者に対するドライバの認知を支援する歩行者認知支援システム、自車線上の物体に追突する可能性がある場合に自動的に緊急制動を行い追突被害を軽減する衝突被害軽減ブレーキシステム等の走行支援システムで活用されている。一般的に画像センサは、レーダと比べて物体の種類を測定することに優れている。
【0004】
更に、前述のレーダ及び画像センサを組み合わせた歩行者検出技術が知られている。例えば、特許文献1には、カメラ画像にて判定した物体種類に対応付けたレーダ検出用閾値を選択し、選択した閾値を用いてレーダ検出を実行している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−174900号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
歩行者のようなレーダの送信信号に対する低反射物体を検出するために、特許文献1に開示された技術を用いて、レーダ検出用の閾値を車両検出用から歩行者検出用に低くすると、ノイズ等により本来検出すべきではない物体が偽像として発生する恐れがある。
【0007】
又、自車の前方に、レーダの送信信号に対する反射強度が低い歩行者等の低反射物体と反射強度が高い車両等の高反射物体が存在する場合、低反射物体の反射強度は、高反射物体の反射強度に吸収されて埋もれてしまい、レーダ検出用閾値を反射強度が低い歩行者等の低反射物体用の閾値とした場合でも、歩行者のような低反射物体を検出し難くなる課題もある。
【0008】
この発明は、従来の装置に於ける前述のような課題を解決するためになされたものであり、歩行者のようなレーダの送信信号に対する低反射物体であってもレーダにより確実に検出することができる物体検出装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
この発明による物体検出装置は、車両の少なくとも前方に存在する物体を検出する物体検出装置であって、前記車両に搭載されたカメラによって撮像された画像に基づいて前記物体の種類を判定する物体種類判定部と、前記車両に搭載された電磁波を送信するレーダの受信信号に基づいて前記物体に関する情報を検出するレーダ物体検出部と、前記レーダを制御するレーダ制御部とを備え、前記レーダ制御部は、前記物体種類判定部が判定した前記物体の種類に応じて、前記レーダの距離分解能と、速度分解能と、角度分解能と、送信電力と、受信ゲインと、送信アンテナの種類の切り替えと、のうちの少なくとも一つを制御することを特徴とするものである。
【0010】
又、この発明による物体検出装置は、車両の少なくとも前方に存在する物体を検出する物体検出装置であって、前記車両に搭載されたカメラによって撮像された画像に基づいて前記物体の種類を判定する物体種類判定部と、前記車両に搭載されたレーザを送信するレーダの受信信号に基づいて前記物体に関する情報を検出するレーダ物体検出部と、前記レーダを制御するレーダ制御部とを備え、前記レーダ制御部は、前記物体種類判定部が判定した前記物体の種類に応じて、前記レーダの照射角度単位と、照射出力と、のうち少なくとも一つを制御することを特徴とするものである。
【発明の効果】
【0011】
この発明による物体検出装置によれば、電磁波を送信するレーダを制御するレーダ制御部は、物体種類判定部が判定した物体の種類に応じて、レーダの距離分解能と、速度分解能と、角度分解能と、送信電力と、受信ゲインと、送信アンテナの種類の切り替えと、のうちの少なくとも一つを制御するように構成されているので、歩行者のようなレーダの送信信号に対する低反射物体であってもレーダにより確実に検出することができる。
【0012】
又、この発明による物体検出装置によれば、レーザを送信するレーダを制御するレーダ制御部は、物体種類判定部が判定した物体の種類に応じて、レーダの照射角度単位と、照射出力とのうち少なくとも一つを制御するように構成されているので、歩行者のようなレーダの送信信号に対する低反射物体であってもレーダにより確実に検出することができる。
【図面の簡単な説明】
【0013】
【図1】この発明の実施の形態1による物体検出装置を示すブロック図である。
【図2】この発明の実施の形態1による物体検出装置を説明する波形図である。
【図3】この発明の実施の形態1による物体検出装置を説明する説明図である。
【図4】この発明の実施の形態1による物体検出装置の処理内容を示すフローチャートである。
【図5】この発明の実施の形態2による物体検出装置を示すブロック図である。
【図6】この発明の実施の形態2による物体検出装置を説明する説明図である。
【図7】この発明の実施の形態3による物体検出装置を示すブロック図である。
【発明を実施するための形態】
【0014】
以下、この発明に係る物体検出装置の好適な実施の形態につき図面を用いて説明するが、各図において同一、または相当する部分については、同一符号を付して説明する。
【0015】
実施の形態1.
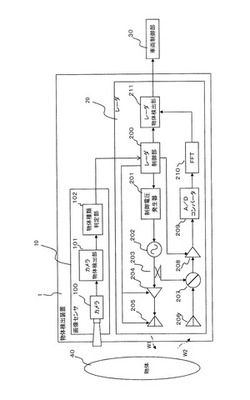
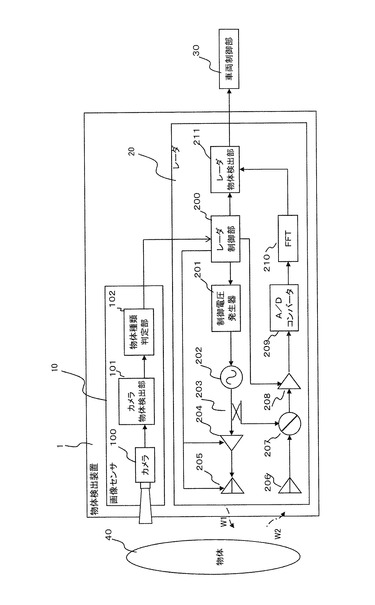
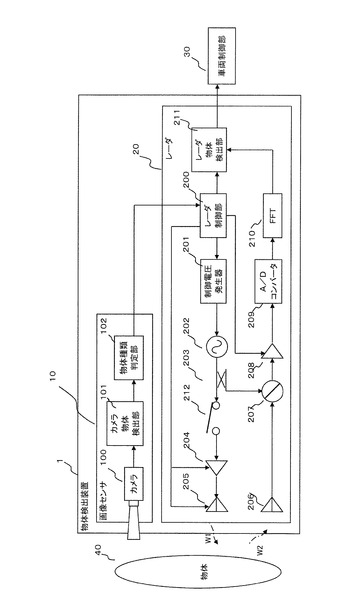
図1は、この発明の実施の形態1による物体検出装置を示すブロック図である。図1に於いて、車両に設けられた物体検出装置1は、画像センサ10と、電磁波を照射すると共にその反射波を受信するレーダ20とを備えている。車両に設けられた車両制御部30は、レーダ物体検出部211により検出した物体40のデータに基づいて車両を制御する。
【0016】
画像センサ10は、カメラ100と、カメラ物体検出部101と、物体種類判定部102とを備える。カメラ100は、例えば、CCD(Charge Coupled Devices)やCMOS(Complementary Metal Oxide Semiconductor)等の撮像素子で構成され、車両前方の画像を撮像し、その画像の画像データをカメラ物体検出部101に出力する。尚、カメラ100として、複数のカメラを組み合わせた構成されたステレオカメラや赤外線カメラを用いてもよい。
【0017】
カメラ物体検出部101と物体種類判定部102は、汎用のCPU(Central Processing Unit)等で構成される。カメラ物体検出部101は、カメラ100により撮像された画像データを画像処理して物体40を検出し、検出した物体40の車両からのおおよその距離等のデータを物体種類判定部102に出力する。物体種類判定部102は、パターンマッチング手法等により物体40の種類を判定する。物体種類判定部102により判定された物体40の種類(歩行者等)は、車両から物体40までのおおよその距離と共に、後述するレーダ制御部200に出力される。
【0018】
レーダ20は、レーダ制御部200、制御電圧発生器201、電圧制御発振器であるVCO(Voltage Controlled Oscillator)202、分配器203、送信アンプ204、電磁波を送信する送信アンテナ205、受信アンテナ206、ミキサ207、受信アンプ208、A/Dコンバータ209、高速フーリエ変換器であるFFT(Fast Fourier Transform)210、及びレーダ物体検出部211を備えている。レーダ20のレーダ方式は、ミリ波を用いたFMCW(Frequency Modulation Continuous Wave)方式としている。又、レーダ制御部200とレーダ物体検出部211は、専用のロジック回路や、汎用のCPU、DSP(Digital Signal Processor)内のプログラム、或いは両者の組み合わせにより構成されている。
【0019】
レーダ20は、物体40の種類に応じて、レーダ制御部200によりレーダ検出モードを切り替えるように構成されている。具体的には、レーダ制御部200は、物体種類判定部102により判定された物体40の種類が歩行者である場合は、レーダ20のレーダ検出モードを歩行者検出モードとし、物体種類判定部102により判定された物体40の種類が歩行者以外である場合は、レーダ20のレーダ検出モードを通常モードに切り替える。
【0020】
尚、以下の説明では、物体40の種類が歩行者か歩行者以外かに応じて、レーダ検出モードを切り替える場合について説明するが、物体40の種類が3種類以上である場合には、夫々の物体40の種類に応じて、レーダ検出モードを切り替えるようにしても良い。
【0021】
ここで、前述の歩行者検出モードについて詳細に説明する。この発明の実施の形態1に於ける物体検出装置に於いて、歩行者検出モードは、下記の態様(a)、(b)、(c)のうちの少なくとも1つの態様の実施により実行される。
(a)通常モードに比べて、レーダ20の距離分解能と速度分解能と角度分解能とのうちの少なくとも1つを高くする。
(b)通常モードに比べて、送信電力や受信ゲインを大きくする。
(c)通常モードに比べて、送信アンテナ205を高ゲインアンテナに切り替える。
【0022】
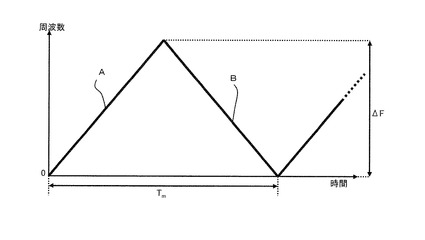
先ず、前述の歩行者検出モードの態様(a)、(b)、(c)のうち、態様(a)に於けるレーダ20の距離分解能と、速度分解能を高くすること、により実行される歩行者検出モードについて説明する。図2は、この発明の実施の形態1による物体検出装置を説明する波形図である。FMCW方式のレーダ20は、図2に示すように、レーダから送信する送信信号の周波数を線型に増加と減少を繰り返すように変調し、この変調された送信信号を物体に対して送受信して物体を検出する。ここで、cを光速、λを送信信号の波長、ΔFを送信信号の変調周波数幅、Tmを送信信号の繰返し周期であるとすると、レーダ20の距離分解能ΔRと速度分解能ΔVは、下記の式(1)及び(2)により表される。
【数1】

【0023】
式(1)から、変調周波数幅ΔFを大きくすればレーダ20の距離分解能ΔRが高くなることが分かる。又、式(2)から、送信信号の繰り返し周期Tmを大きくすればレーダ20の速度分解能ΔVが高くなることが分かる。従って、距離分解能ΔRを高くして歩行者検出モードとする場合は、レーダ制御部200は、通常モードに比べて、物体40と車両との間のおおよその距離に基づいてレーダ20の制御電圧発生器201の変調周波数幅ΔFを拡大する。又、距離分解能ΔVを高くして歩行者検出モードとする場合は、レーダ制御部200は、通常モードに比べて、物体40に対する車両のおおよその速度に基づいてレーダ20の制御電圧発生器201の繰り返し周期Tmを拡大する。
【0024】
これにより、歩行者と他の物体を分離検出可能な分解能に高め、レーダから送信されたビームに対して反射強度が低い歩行者と反射強度が強い車両が混在しても、歩行者の反射強度が車両の反射強度に吸収されず、歩行者を検出することができる。
【0025】
ここで、図2に示すレーダ20からの送信信号の周波数の上昇区間Aのビート周波数スペクトルのピーク周波数をfbu、下降区間Bのビート周波数スペクトルのピーク周波数をfbdとすると、物体40の最大検出距離Rmaxは、下記の式(3)により表される。
【数2】
【0026】
式(3)に示すように、物体40の最大検出距離Rmaxは、変調周波数幅ΔF、繰返し周期Tmに伴って変化することになるので、歩行者検出モードでのみ、歩行者のおおよその距離に基づいて、変調周波数幅ΔF、繰返し周期Tmを拡大するのである。
【0027】
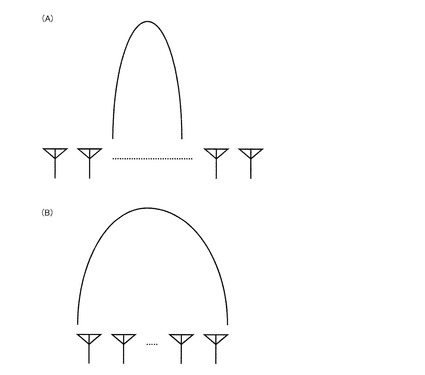
次に、前述の態様(a)に於ける、角度分解能を高くすることにより実施する歩行者検出モードについて説明する。アンテナ素子を2次元に配列して構成されるアレイ状のアンテナ素子をレーダに使用する場合、使用するアンテナ素子の数に応じてビーム幅は変化する。図3は、この発明の実施の形態1による物体検出装置を説明する説明図であり、(A)は使用するアンテナ素子数を多くした場合、(B)は使用するアンテナ素子数を少なくした場合、を示す。
【0028】
図3の(A)に示すように、使用するアンテナ素子数を多くすれば(素子数:Nt)、ビーム幅は細く形成され、図3の(B)に示すように、使用するアンテナ素子数を少なくすれば(素子数:Nf、[Nf<Nt])すれば、ビーム幅は太く形成される。従って、ビーム幅を細く形成する場合、レーダ制御部200は、通常モードに比べて、レーダ20の送信アンテナ205として使用するアンテナ素子数を多くする。これにより、歩行者と他の物体を分離検出可能な分解能に高め、歩行者を検出することが出来る。ただし、ビーム幅を細く形成する場合、物体40を検出可能な範囲(覆域)を通常モードと同一にするためには多くのビーム数が必要となり、処理時間がかさむので、歩行者検出モードでのみ、ビーム幅を細く形成することとする。
【0029】
次に、前述の態様(b)に於ける、送信電力や受信ゲインを大きくすることにより実施する歩行者検出モードについて説明する。送信電力を大きくする場合、レーダ制御部200は、通常モードに比べて、レーダ20の送信アンプ204の増幅率を増やす。これにより、送信アンテナ205から送信される送信信号の送信電力が通常モードのときよりも増大し、通常モードでは反射強度が低かった歩行者からの反射強度が増大し、確実に歩行者を検出することができる。又、レーダ20の受信アンプ208の受信ゲインを大きくすることにより、受信アンテナ206が受信した歩行者からの反射信号の強度が増大し、確実に歩行者を検出することができる。尚、前述の送信電力の増大と、受信ゲインの増大とは、何れか一方を行なっても良く、同時に行ってもよい。
【0030】
次に、前述の態様(c)に於ける、送信アンテナを高ゲインアンテナに切り替えることによる歩行者検出モードについて説明する。送信アンテナ205を高ゲインアンテナに切り替える場合、レーダ制御部200は、通常モードに比べて、レーダ20の送信アンテナ205を高ゲインアンテナに切り替える。これにより、通常モードでは反射強度が低かった歩行者からの反射強度が増大し、確実に歩行者を検出することができる。尚、高ゲインアンテナは、予め、レーダ20に搭載されているものとする。
【0031】
尚、通常モードに比べて前述のレーダ20の送信電力や受信ゲインを大きくする変更、及び送信アンテナを高ゲインアンテナに切り替える変更は、多数の物体を検出することが予想され、通常モードに比べて多くの処理時間が必要となるので、歩行者検出モードのみ変更することとする。
【0032】
以上のように構成されたこの発明の実施の形態1による物体検出装置に於いて、レーダ制御部200により制御電圧発生器201に対して変調開始命令が出力されると、制御電圧発生器201により予め設定された2つの変調区間、例えば、図2に示す三角状の上昇区間A/下降区間B、の制御電圧が電圧制御発振器としてのVCO202に印加され、VCO202からは、制御電圧に従って変調区間毎に周波数変調された送信信号が出力される。
【0033】
VCO202からの送信信号は、分配器203を介してレーダ制御部200により制御される送信アンプ204とミキサ207とに分配され、送信アンプ204により増幅して後、送信アンテナ205により物体40に向けて送信信号W1が出射される。一方、物体40により反射された反射信号W2は、受信アンテナ206により受信信号として受信され、ミキサ207により送信信号とミキシングされる。
【0034】
これにより、ミキサ207からは、ビート信号が生成され、そのビート信号は、受信アンプ208で増幅された後、前述の上昇区間A/下降区間Bの夫々について、A/Dコンバータ209により各々ディジタルデータに変換される。
【0035】
A/Dコンバータ209により生成されたディジタルデータは、高速フーリエ変換器であるFFT210により、高速フーリエ変換を用いた周波数解析が施される。FFT210により算出された周波数解析結果(ビート周波数スペクトル)は、上昇区間A/下降区間Bの夫々について、レーダ物体検出部211に入力される。レーダ物体検出部211は、使用するレーダ方式や測角方式に対応するレーダ信号処理を実施して、物体40までの相対距離、相対速度、反射強度、水平方向角度、種類などの測定結果を算出する。物体40の測定結果は、車両制御部30に出力され、走行支援システムで活用される。
【0036】
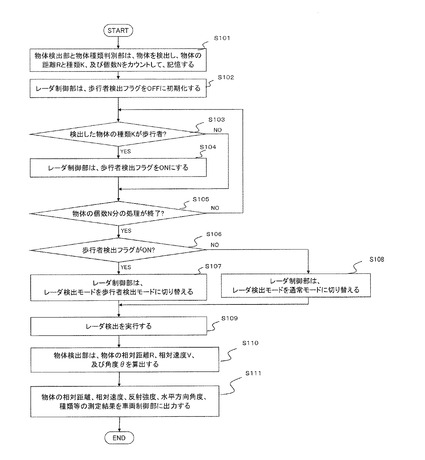
次に、この発明の実施の形態1による物体検出装置の動作について、フローチャートを用いて詳細に説明する。図4は、この発明の実施の形態1による物体検出装置の処理内容を示すフローチャートである。図4に於いて、先ず、ステップS101では、画像センサ10のカメラ物体検出部101は、カメラ100が撮像した物体40の画像データを画像処理し、物体40の車両からのおおよその距離Rと種類K、及び物体の個数Nをカウントして物体種類判定部102に入力する。物体種類判定部102は、カメラ物体検出部101から入力されたこれ等のデータを記憶する。
【0037】
次に、ステップS102に於いて、レーダ制御部200は、歩行者検出フラグをOFFに初期化する。
【0038】
続いて、ステップS103に於いて、物体種類判定部102は、ステップS101にて記憶した物体の種類Kが歩行者であるか否かを、個数Nについて個々に判定し、車両から物体40までのおおよその距離と共に、その判定結果をレーダ制御部200に出力する。
【0039】
ステップS103に於いて、物体40の種類Kが歩行者であると判定された場合(YES)には、ステップS104に進む。一方ステップS103において、物体40の種類Kが歩行者でないと判定された場合(NO)には、ステップS105に進む。
【0040】
ステップS104に進むと、レーダ制御部200は、歩行者検出フラグをONにして、ステップS105に進む。ステップS105では、ステップS101でカウントした物体40の個数N個分の処理が終了したか否かを判定する。
【0041】
ステップS105に於いて、検出した全ての物体について処理が終了したと判定された場合(YES)には、ステップS106に進む。一方、ステップS105に於いて、処理が終了していないと判定された場合(NO)には、ステップS103に戻って、ステップS103乃至ステップS105の処理を繰り返し実行する。
【0042】
次に、ステップS106に於いて、レーダ制御部200は、歩行者検出フラグがONであるか否かを判定し、歩行者検出フラグがONであると判定された場合(YES)には、ステップS107に進む。一方、ステップS106に於いて、歩行者検出フラグがONでないと判定された場合(NO)には、ステップS108に進む。
【0043】
ステップS107に進むと、レーダ制御部200は、レーダ検出モードを歩行者検出モードに切り替える。即ち、通常モードに比べて、距離分解能や速度分解能や角度分解能を高くする前述の態様1、若しくは、送信電力や受信ゲインを大きくする前述の態様2、若しくは、送信アンテナを高ゲインアンテナに切り替える前述の態様3、の少なくとも1つを実施する。
【0044】
一方、ステップS108に進むと、レーダ制御部200は、レーダ検出モードを通常モードに切り替える。即ち、距離分解能や速度分解能や角度分解能、送信電力や受信ゲイン、送信アンテナを通常値にする。
【0045】
次に、ステップS109に於いて、レーダ制御部200は、ステップS107又はステップS108に於いて切り替えたレーダ検出モードに応じて、レーダ検出を実行する。
【0046】
次に、ステップS110に於いて、レーダ物体検出部211は、物体40の相対距離R、及び相対速度Vを、FMCW方式の原理に基づいて、角度θを例えばDBF(Digital Beam Forming)方式の原理に基づいて算出する。
【0047】
最後に、ステップS111に於いて、レーダ20は、検出した個々の物体40について、車両との距離R、相対速度V、水平方向角度θ、種類K等の測定結果を車両制御部30に出力する。
【0048】
以上のように、この発明の実施の形態1による物体検出装置によれば、物体の種類が歩行者である場合、車両に搭載されたレーダの距離分解能や速度分解能や角度分解能を高くすることで、反射強度が低い歩行者と反射強度が強い車両が存在しても、歩行者の反射強度が車両の反射強度に吸収されず、歩行者を検出することができ、又、送信電力や受信ゲインを大きくしたり、送信アンテナを高ゲインアンテナに切り替えることで、歩行者のような低反射物体を検出することができる。
【0049】
実施の形態2.
前述の実施の形態1ではレーダ方式をFMCW方式としていたが、実施の形態2は、レーダ方式をパルス方式とし、送信信号の切り替えをスイッチにより行うようにしたものである。
【0050】
以下、この発明の実施の形態2による物体検出装置について、図を参照しながら説明する。図5は、この発明の実施の形態2による物体検出装置を示すブロック図であり、実施の形態1と同一若しくは相当部分には同一符号を付してある。図6は、この発明の実施の形態2による物体検出装置を説明する説明図である。実施の形態2では、実施の形態1に対して距離分解能と速度分解能を高くする方法が異なるため、以下の説明では、距離分解能と速度分解能を高くする方法について説明する。その他は、実施の形態1の場合と同様である。
【0051】
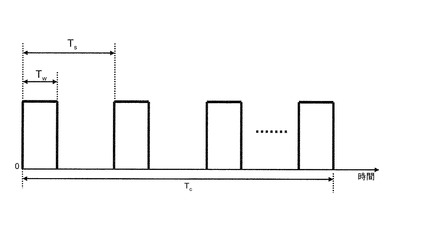
図5に於いて、レーダ20は、レーダ方式としてパルス方式を用いている。スイッチ212は、分配器203と送信アンプ204との間に挿入されている。パルス方式のレーダ20は、図6に示すように、パルス変調されたパルス信号を送信信号として物体40に対して送受信し、物体40を検出する。ここで、cを光速、λを波長、Twをパルス幅、Tcをパルス観測時間とすると、距離分解能ΔRと速度分解能ΔVは、下記の式(4)、(5)により夫々表される。
【数3】
【0052】
従って、距離分解能ΔR、又は速度分解能ΔVを高くする場合、レーダ制御部200は、物体40と車両との間のおおよその距離に基づいて、レーダ20の制御電圧発生器201を制御してパルス幅Twを縮小し、又は、パルス観測時間Tcを拡大させる。これにより、歩行者と他の物体を分離検出可能な距離分解能ΔRを高め、又は、速度分解能ΔVを高め、反射強度が低い歩行者と反射強度が強い車両が存在しても、歩行者の反射強度が車両の反射強度に吸収されず、歩行者を検出することができる。
【0053】
ただし、パルス幅Twを縮小した場合、送信パワーが小さくなり、物体の最大検出距離が短くなる、又、パルス観測時間Tcを拡大した場合、全体の処理時間が長くなるので、歩行者検出モードでのみ、歩行者のおおよその距離に基づいて、パルス幅Twを縮小したり、観測時間Tcを拡大することとする。
【0054】
尚、実施の形態2による物体検出装置の動作手順を示すフローチャートは、前述の図4のフローチャートと共通するので、その説明を省略する。
【0055】
以上述べたように、この発明の実施の形態2による物体検出装置によれば、物体の種類が歩行者である場合、車両に搭載されたレーダの距離分解能と、速度分解能と、角度分解能と農地の少なくとも1つを高くすることで、反射強度が低い歩行者と反射強度が強い車両が存在しても、歩行者の反射強度が車両の反射強度に吸収されず、歩行者を検出することが出来る。又、レーダの送信電力や受信ゲインを大きくしたり、送信アンテナを高ゲインアンテナに切り替えることで、歩行者のような低反射物体を検出することができる。
【0056】
実施の形態3.
実施の形態1及び2では、レーダをミリ波レーダにより構成していたが、実施の形態3では、レーダを送信するレーザレーダにより構成したものである。
【0057】
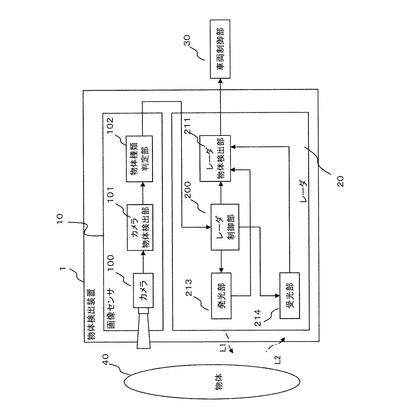
以下、この発明の実施の形態3による物体検出装置について、図を参照しながら説明する。図7は、この発明の実施の形態3による物体検出装置を示すブロック図であり、実施の形態1と同一若しくは相当部分には同一符号を付してある。図7に於いて、物体検出装置1は、画像センサ10と、レーダ20とから構成される。画像センサ10は、カメラ100と、カメラ物体検出部101と、物体種類判定部102とを備える。レーダ20は、レーダ制御部200と、発光部213と、受光部214と、レーダ物体検出部211とを備える。レーダ20は、レーザレーダにより構成されている。30は車両制御部、40は物体である。
【0058】
実施の形態3に於いて、画像センサ10の構成及び動作は、実施の形態1の場合と同様であるため、その説明を省略する。
【0059】
レーダ20は、物体40の種類に応じて、レーダ制御部200によりレーダ検出モードを切り替える。具体的には、レーダ制御部200は、物体種類判定部102により判定された物体40の種類が歩行者の場合は、レーダ20のレーダ検出モードを歩行者検出モードに切り替え、歩行者以外の場合は、レーダ20のレーダ検出モードを通常モードに切り替える。
【0060】
ここで、歩行者検出モードについて詳細に説明する。歩行者検出モードは、通常モードに比べて、レーダ20の角度分解能を高くすること、照射出力を大きくすること、のうちの少なくとも1つを実施するレーダ検出モードである。
【0061】
最初に角度分解能を高くする方法について説明する。角度分解能を高くするために、レーダ制御部200は、レーダ20の発光部213を制御して、レーザを照射するための駆動角度の刻み、即ち照射角度単位を小さくする。これにより、歩行者と他の物体を分離検出可能な分解能に高め、歩行者を検出することが出来る。但し、駆動角度の刻みを小さくする場合、物体を検出可能な範囲(覆域)を通常モードと同一にするためには多くの時間が必要となるので、歩行者検出モードでのみ、駆動角度の刻みを小さくすることとする。
【0062】
次に照射出力を大きくする方法について説明する。照射出力を大きくするために、レーダ制御部200は、レーダ20の発光部213の増幅率を増やす。これにより、通常モードでは反射強度が低い歩行者を検出可能にする。但し、照射出力を大きくする場合、多くの物体を検出することが予想され、通常モードに比べて多くの処理時間が必要となるので、歩行者検出モードのみ変更することとする。
【0063】
レーダ制御部200により発光部213に対して照射命令が出力されると、発光部213からは、レーザが送信信号L1として出射される。一方、物体40で反射されたレーザL2は、受光部214により受信信号として受信され、レーダ物体検出部211に入力される。レーダ物体検出部211は、レーダ信号処理を実施して、物体40までの相対距離、相対速度、反射強度、水平方向角度、種類などの測定結果を算出する。レーダ物体検出部211により算出された物体40の測定結果は、車両制御部30に出力され、走行支援システムに於いて活用される。
【0064】
尚、実施の形態3による物体検出装置の動作手順を示すフローチャートは、前述の図4のフローチャートと共通するので、その説明を省略する。
【0065】
以上のように、この発明の実施の形態3による物体検出装置によれば、物体の種類が歩行者である場合、車両に搭載されたレーダの角度分解能を高くすることで、反射強度が低い歩行者と反射強度が強い車両が存在しても、歩行者の反射強度が車両の反射強度に吸収されず、歩行者を検出することが出来る。又、レーザ出力大きくすることで、歩行者のような低反射物体を検出することができる。
【0066】
尚、前述の実施の形態1、2では、物体40の距離R及び相対速度Vを検出するレーダ方式として、FMCW方式やパルス方式を用いた場合を例示したが、FMCW方式の送信信号をパルス状に区切って変調したFM−パルスドップラー方式レーダ装置やその他のレーダ方式もこの発明を適用することができる。
【0067】
又、物体40の角度θを検出する測角方式として、DBF方式を用いた場合を例示したが、その他の方式もこの発明を適用することが出来る。
【0068】
更に、レーダとして、ミリ波レーダとレーザレーダを用いた場合を例示したが、その他のレーダもこの発明を適用することが出来る。
【0069】
この発明に係る物体検出装置は、走行車両の障害となる物体の検出に有用であり、特に、歩行者などの低反射物体の検出および車両などの高反射物体の検出を確実に行いたい場合に適している。
【0070】
以上述べたこの発明の実施の形態による物体検出装置によれば、車両に搭載された画像センサによって撮像された画像に基づいて物体の種類を判定し、その判定された種類が歩行者である場合、車両に搭載されたレーダの距離分解能や速度分解能や角度分解能を高くすることで、反射強度が低い歩行者と反射強度が強い車両が存在しても、歩行者の反射強度が車両の反射強度に吸収されず、歩行者を検出することが出来る。又、レーダの送信電力や受信ゲインを大きくしたり、送信アンテナを高ゲインアンテナに切り替えることで、歩行者のような低反射物体を検出することができる。更に、レーダの閾値を反射強度が低い歩行者用に変更する必要がないので、ノイズなどにより偽像を検出することもない。
【符号の説明】
【0071】
1 物体検出装置 10 画像センサ
100 カメラ 101 カメラ物体検出部
102 物体種類判定部 20 レーダ
200 レーダ制御部 201 制御電圧発生器
202 電圧制御発振器 203 分配器
204 送信アンプ 205 送信アンテナ
206 受信アンテナ 207 ミキサ
208 受信アンプ 209 A/Dコンバータ
210 FFT 211 レーダ物体検出部
212 スイッチ 213 発光部
214 受光部 30 車両制御部
【技術分野】
【0001】
この発明は、車両の近辺に存在する物体を検出する物体検出装置に関し、特に、歩行者のようなレーダの送信信号に対する低反射物体であっても検出することができる物体検出装置に関する。
【背景技術】
【0002】
従来から、車両に搭載されたレーダによって測定される自車と物体との相対距離、相対速度、水平方向角度、反射強度等の測定結果は、自車と自車の進行方向線上の前方車両との車間距離を一定に保つ車間距離制御システム、滞環境下で自車の進行方向線上の前方車両に追従走行を行う低車速追従走行システム、車間距離制御システムの機能を停止制御まで拡張した全車速域車間距離制御システム、自車の進行方向線上の前方車両に追突する可能性がある場合に自動的に緊急制動を行い、追突被害を軽減する衝突被害軽減ブレーキシステム等で、ドライバの運転負荷軽減、利便性向上、危険に対する注意喚起、事故回避/被害軽減等を狙った走行支援システムに活用されている。一般的にレーダは、画像センサと比べて物体との相対距離、相対速度を測定することに優れている。
【0003】
又、車両に搭載されたカメラ等の画像センサによって測定される自車の前方車線、物体の種類、自車と物体との相対距離、水平方向角度などの測定結果は、車線内の自車の走行を維持支援するように自動的に操舵を制御する車線維持支援システム、夜間走行時に前方の歩行者に対するドライバの認知を支援する歩行者認知支援システム、自車線上の物体に追突する可能性がある場合に自動的に緊急制動を行い追突被害を軽減する衝突被害軽減ブレーキシステム等の走行支援システムで活用されている。一般的に画像センサは、レーダと比べて物体の種類を測定することに優れている。
【0004】
更に、前述のレーダ及び画像センサを組み合わせた歩行者検出技術が知られている。例えば、特許文献1には、カメラ画像にて判定した物体種類に対応付けたレーダ検出用閾値を選択し、選択した閾値を用いてレーダ検出を実行している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−174900号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
歩行者のようなレーダの送信信号に対する低反射物体を検出するために、特許文献1に開示された技術を用いて、レーダ検出用の閾値を車両検出用から歩行者検出用に低くすると、ノイズ等により本来検出すべきではない物体が偽像として発生する恐れがある。
【0007】
又、自車の前方に、レーダの送信信号に対する反射強度が低い歩行者等の低反射物体と反射強度が高い車両等の高反射物体が存在する場合、低反射物体の反射強度は、高反射物体の反射強度に吸収されて埋もれてしまい、レーダ検出用閾値を反射強度が低い歩行者等の低反射物体用の閾値とした場合でも、歩行者のような低反射物体を検出し難くなる課題もある。
【0008】
この発明は、従来の装置に於ける前述のような課題を解決するためになされたものであり、歩行者のようなレーダの送信信号に対する低反射物体であってもレーダにより確実に検出することができる物体検出装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
この発明による物体検出装置は、車両の少なくとも前方に存在する物体を検出する物体検出装置であって、前記車両に搭載されたカメラによって撮像された画像に基づいて前記物体の種類を判定する物体種類判定部と、前記車両に搭載された電磁波を送信するレーダの受信信号に基づいて前記物体に関する情報を検出するレーダ物体検出部と、前記レーダを制御するレーダ制御部とを備え、前記レーダ制御部は、前記物体種類判定部が判定した前記物体の種類に応じて、前記レーダの距離分解能と、速度分解能と、角度分解能と、送信電力と、受信ゲインと、送信アンテナの種類の切り替えと、のうちの少なくとも一つを制御することを特徴とするものである。
【0010】
又、この発明による物体検出装置は、車両の少なくとも前方に存在する物体を検出する物体検出装置であって、前記車両に搭載されたカメラによって撮像された画像に基づいて前記物体の種類を判定する物体種類判定部と、前記車両に搭載されたレーザを送信するレーダの受信信号に基づいて前記物体に関する情報を検出するレーダ物体検出部と、前記レーダを制御するレーダ制御部とを備え、前記レーダ制御部は、前記物体種類判定部が判定した前記物体の種類に応じて、前記レーダの照射角度単位と、照射出力と、のうち少なくとも一つを制御することを特徴とするものである。
【発明の効果】
【0011】
この発明による物体検出装置によれば、電磁波を送信するレーダを制御するレーダ制御部は、物体種類判定部が判定した物体の種類に応じて、レーダの距離分解能と、速度分解能と、角度分解能と、送信電力と、受信ゲインと、送信アンテナの種類の切り替えと、のうちの少なくとも一つを制御するように構成されているので、歩行者のようなレーダの送信信号に対する低反射物体であってもレーダにより確実に検出することができる。
【0012】
又、この発明による物体検出装置によれば、レーザを送信するレーダを制御するレーダ制御部は、物体種類判定部が判定した物体の種類に応じて、レーダの照射角度単位と、照射出力とのうち少なくとも一つを制御するように構成されているので、歩行者のようなレーダの送信信号に対する低反射物体であってもレーダにより確実に検出することができる。
【図面の簡単な説明】
【0013】
【図1】この発明の実施の形態1による物体検出装置を示すブロック図である。
【図2】この発明の実施の形態1による物体検出装置を説明する波形図である。
【図3】この発明の実施の形態1による物体検出装置を説明する説明図である。
【図4】この発明の実施の形態1による物体検出装置の処理内容を示すフローチャートである。
【図5】この発明の実施の形態2による物体検出装置を示すブロック図である。
【図6】この発明の実施の形態2による物体検出装置を説明する説明図である。
【図7】この発明の実施の形態3による物体検出装置を示すブロック図である。
【発明を実施するための形態】
【0014】
以下、この発明に係る物体検出装置の好適な実施の形態につき図面を用いて説明するが、各図において同一、または相当する部分については、同一符号を付して説明する。
【0015】
実施の形態1.
図1は、この発明の実施の形態1による物体検出装置を示すブロック図である。図1に於いて、車両に設けられた物体検出装置1は、画像センサ10と、電磁波を照射すると共にその反射波を受信するレーダ20とを備えている。車両に設けられた車両制御部30は、レーダ物体検出部211により検出した物体40のデータに基づいて車両を制御する。
【0016】
画像センサ10は、カメラ100と、カメラ物体検出部101と、物体種類判定部102とを備える。カメラ100は、例えば、CCD(Charge Coupled Devices)やCMOS(Complementary Metal Oxide Semiconductor)等の撮像素子で構成され、車両前方の画像を撮像し、その画像の画像データをカメラ物体検出部101に出力する。尚、カメラ100として、複数のカメラを組み合わせた構成されたステレオカメラや赤外線カメラを用いてもよい。
【0017】
カメラ物体検出部101と物体種類判定部102は、汎用のCPU(Central Processing Unit)等で構成される。カメラ物体検出部101は、カメラ100により撮像された画像データを画像処理して物体40を検出し、検出した物体40の車両からのおおよその距離等のデータを物体種類判定部102に出力する。物体種類判定部102は、パターンマッチング手法等により物体40の種類を判定する。物体種類判定部102により判定された物体40の種類(歩行者等)は、車両から物体40までのおおよその距離と共に、後述するレーダ制御部200に出力される。
【0018】
レーダ20は、レーダ制御部200、制御電圧発生器201、電圧制御発振器であるVCO(Voltage Controlled Oscillator)202、分配器203、送信アンプ204、電磁波を送信する送信アンテナ205、受信アンテナ206、ミキサ207、受信アンプ208、A/Dコンバータ209、高速フーリエ変換器であるFFT(Fast Fourier Transform)210、及びレーダ物体検出部211を備えている。レーダ20のレーダ方式は、ミリ波を用いたFMCW(Frequency Modulation Continuous Wave)方式としている。又、レーダ制御部200とレーダ物体検出部211は、専用のロジック回路や、汎用のCPU、DSP(Digital Signal Processor)内のプログラム、或いは両者の組み合わせにより構成されている。
【0019】
レーダ20は、物体40の種類に応じて、レーダ制御部200によりレーダ検出モードを切り替えるように構成されている。具体的には、レーダ制御部200は、物体種類判定部102により判定された物体40の種類が歩行者である場合は、レーダ20のレーダ検出モードを歩行者検出モードとし、物体種類判定部102により判定された物体40の種類が歩行者以外である場合は、レーダ20のレーダ検出モードを通常モードに切り替える。
【0020】
尚、以下の説明では、物体40の種類が歩行者か歩行者以外かに応じて、レーダ検出モードを切り替える場合について説明するが、物体40の種類が3種類以上である場合には、夫々の物体40の種類に応じて、レーダ検出モードを切り替えるようにしても良い。
【0021】
ここで、前述の歩行者検出モードについて詳細に説明する。この発明の実施の形態1に於ける物体検出装置に於いて、歩行者検出モードは、下記の態様(a)、(b)、(c)のうちの少なくとも1つの態様の実施により実行される。
(a)通常モードに比べて、レーダ20の距離分解能と速度分解能と角度分解能とのうちの少なくとも1つを高くする。
(b)通常モードに比べて、送信電力や受信ゲインを大きくする。
(c)通常モードに比べて、送信アンテナ205を高ゲインアンテナに切り替える。
【0022】
先ず、前述の歩行者検出モードの態様(a)、(b)、(c)のうち、態様(a)に於けるレーダ20の距離分解能と、速度分解能を高くすること、により実行される歩行者検出モードについて説明する。図2は、この発明の実施の形態1による物体検出装置を説明する波形図である。FMCW方式のレーダ20は、図2に示すように、レーダから送信する送信信号の周波数を線型に増加と減少を繰り返すように変調し、この変調された送信信号を物体に対して送受信して物体を検出する。ここで、cを光速、λを送信信号の波長、ΔFを送信信号の変調周波数幅、Tmを送信信号の繰返し周期であるとすると、レーダ20の距離分解能ΔRと速度分解能ΔVは、下記の式(1)及び(2)により表される。
【数1】
【0023】
式(1)から、変調周波数幅ΔFを大きくすればレーダ20の距離分解能ΔRが高くなることが分かる。又、式(2)から、送信信号の繰り返し周期Tmを大きくすればレーダ20の速度分解能ΔVが高くなることが分かる。従って、距離分解能ΔRを高くして歩行者検出モードとする場合は、レーダ制御部200は、通常モードに比べて、物体40と車両との間のおおよその距離に基づいてレーダ20の制御電圧発生器201の変調周波数幅ΔFを拡大する。又、距離分解能ΔVを高くして歩行者検出モードとする場合は、レーダ制御部200は、通常モードに比べて、物体40に対する車両のおおよその速度に基づいてレーダ20の制御電圧発生器201の繰り返し周期Tmを拡大する。
【0024】
これにより、歩行者と他の物体を分離検出可能な分解能に高め、レーダから送信されたビームに対して反射強度が低い歩行者と反射強度が強い車両が混在しても、歩行者の反射強度が車両の反射強度に吸収されず、歩行者を検出することができる。
【0025】
ここで、図2に示すレーダ20からの送信信号の周波数の上昇区間Aのビート周波数スペクトルのピーク周波数をfbu、下降区間Bのビート周波数スペクトルのピーク周波数をfbdとすると、物体40の最大検出距離Rmaxは、下記の式(3)により表される。
【数2】
【0026】
式(3)に示すように、物体40の最大検出距離Rmaxは、変調周波数幅ΔF、繰返し周期Tmに伴って変化することになるので、歩行者検出モードでのみ、歩行者のおおよその距離に基づいて、変調周波数幅ΔF、繰返し周期Tmを拡大するのである。
【0027】
次に、前述の態様(a)に於ける、角度分解能を高くすることにより実施する歩行者検出モードについて説明する。アンテナ素子を2次元に配列して構成されるアレイ状のアンテナ素子をレーダに使用する場合、使用するアンテナ素子の数に応じてビーム幅は変化する。図3は、この発明の実施の形態1による物体検出装置を説明する説明図であり、(A)は使用するアンテナ素子数を多くした場合、(B)は使用するアンテナ素子数を少なくした場合、を示す。
【0028】
図3の(A)に示すように、使用するアンテナ素子数を多くすれば(素子数:Nt)、ビーム幅は細く形成され、図3の(B)に示すように、使用するアンテナ素子数を少なくすれば(素子数:Nf、[Nf<Nt])すれば、ビーム幅は太く形成される。従って、ビーム幅を細く形成する場合、レーダ制御部200は、通常モードに比べて、レーダ20の送信アンテナ205として使用するアンテナ素子数を多くする。これにより、歩行者と他の物体を分離検出可能な分解能に高め、歩行者を検出することが出来る。ただし、ビーム幅を細く形成する場合、物体40を検出可能な範囲(覆域)を通常モードと同一にするためには多くのビーム数が必要となり、処理時間がかさむので、歩行者検出モードでのみ、ビーム幅を細く形成することとする。
【0029】
次に、前述の態様(b)に於ける、送信電力や受信ゲインを大きくすることにより実施する歩行者検出モードについて説明する。送信電力を大きくする場合、レーダ制御部200は、通常モードに比べて、レーダ20の送信アンプ204の増幅率を増やす。これにより、送信アンテナ205から送信される送信信号の送信電力が通常モードのときよりも増大し、通常モードでは反射強度が低かった歩行者からの反射強度が増大し、確実に歩行者を検出することができる。又、レーダ20の受信アンプ208の受信ゲインを大きくすることにより、受信アンテナ206が受信した歩行者からの反射信号の強度が増大し、確実に歩行者を検出することができる。尚、前述の送信電力の増大と、受信ゲインの増大とは、何れか一方を行なっても良く、同時に行ってもよい。
【0030】
次に、前述の態様(c)に於ける、送信アンテナを高ゲインアンテナに切り替えることによる歩行者検出モードについて説明する。送信アンテナ205を高ゲインアンテナに切り替える場合、レーダ制御部200は、通常モードに比べて、レーダ20の送信アンテナ205を高ゲインアンテナに切り替える。これにより、通常モードでは反射強度が低かった歩行者からの反射強度が増大し、確実に歩行者を検出することができる。尚、高ゲインアンテナは、予め、レーダ20に搭載されているものとする。
【0031】
尚、通常モードに比べて前述のレーダ20の送信電力や受信ゲインを大きくする変更、及び送信アンテナを高ゲインアンテナに切り替える変更は、多数の物体を検出することが予想され、通常モードに比べて多くの処理時間が必要となるので、歩行者検出モードのみ変更することとする。
【0032】
以上のように構成されたこの発明の実施の形態1による物体検出装置に於いて、レーダ制御部200により制御電圧発生器201に対して変調開始命令が出力されると、制御電圧発生器201により予め設定された2つの変調区間、例えば、図2に示す三角状の上昇区間A/下降区間B、の制御電圧が電圧制御発振器としてのVCO202に印加され、VCO202からは、制御電圧に従って変調区間毎に周波数変調された送信信号が出力される。
【0033】
VCO202からの送信信号は、分配器203を介してレーダ制御部200により制御される送信アンプ204とミキサ207とに分配され、送信アンプ204により増幅して後、送信アンテナ205により物体40に向けて送信信号W1が出射される。一方、物体40により反射された反射信号W2は、受信アンテナ206により受信信号として受信され、ミキサ207により送信信号とミキシングされる。
【0034】
これにより、ミキサ207からは、ビート信号が生成され、そのビート信号は、受信アンプ208で増幅された後、前述の上昇区間A/下降区間Bの夫々について、A/Dコンバータ209により各々ディジタルデータに変換される。
【0035】
A/Dコンバータ209により生成されたディジタルデータは、高速フーリエ変換器であるFFT210により、高速フーリエ変換を用いた周波数解析が施される。FFT210により算出された周波数解析結果(ビート周波数スペクトル)は、上昇区間A/下降区間Bの夫々について、レーダ物体検出部211に入力される。レーダ物体検出部211は、使用するレーダ方式や測角方式に対応するレーダ信号処理を実施して、物体40までの相対距離、相対速度、反射強度、水平方向角度、種類などの測定結果を算出する。物体40の測定結果は、車両制御部30に出力され、走行支援システムで活用される。
【0036】
次に、この発明の実施の形態1による物体検出装置の動作について、フローチャートを用いて詳細に説明する。図4は、この発明の実施の形態1による物体検出装置の処理内容を示すフローチャートである。図4に於いて、先ず、ステップS101では、画像センサ10のカメラ物体検出部101は、カメラ100が撮像した物体40の画像データを画像処理し、物体40の車両からのおおよその距離Rと種類K、及び物体の個数Nをカウントして物体種類判定部102に入力する。物体種類判定部102は、カメラ物体検出部101から入力されたこれ等のデータを記憶する。
【0037】
次に、ステップS102に於いて、レーダ制御部200は、歩行者検出フラグをOFFに初期化する。
【0038】
続いて、ステップS103に於いて、物体種類判定部102は、ステップS101にて記憶した物体の種類Kが歩行者であるか否かを、個数Nについて個々に判定し、車両から物体40までのおおよその距離と共に、その判定結果をレーダ制御部200に出力する。
【0039】
ステップS103に於いて、物体40の種類Kが歩行者であると判定された場合(YES)には、ステップS104に進む。一方ステップS103において、物体40の種類Kが歩行者でないと判定された場合(NO)には、ステップS105に進む。
【0040】
ステップS104に進むと、レーダ制御部200は、歩行者検出フラグをONにして、ステップS105に進む。ステップS105では、ステップS101でカウントした物体40の個数N個分の処理が終了したか否かを判定する。
【0041】
ステップS105に於いて、検出した全ての物体について処理が終了したと判定された場合(YES)には、ステップS106に進む。一方、ステップS105に於いて、処理が終了していないと判定された場合(NO)には、ステップS103に戻って、ステップS103乃至ステップS105の処理を繰り返し実行する。
【0042】
次に、ステップS106に於いて、レーダ制御部200は、歩行者検出フラグがONであるか否かを判定し、歩行者検出フラグがONであると判定された場合(YES)には、ステップS107に進む。一方、ステップS106に於いて、歩行者検出フラグがONでないと判定された場合(NO)には、ステップS108に進む。
【0043】
ステップS107に進むと、レーダ制御部200は、レーダ検出モードを歩行者検出モードに切り替える。即ち、通常モードに比べて、距離分解能や速度分解能や角度分解能を高くする前述の態様1、若しくは、送信電力や受信ゲインを大きくする前述の態様2、若しくは、送信アンテナを高ゲインアンテナに切り替える前述の態様3、の少なくとも1つを実施する。
【0044】
一方、ステップS108に進むと、レーダ制御部200は、レーダ検出モードを通常モードに切り替える。即ち、距離分解能や速度分解能や角度分解能、送信電力や受信ゲイン、送信アンテナを通常値にする。
【0045】
次に、ステップS109に於いて、レーダ制御部200は、ステップS107又はステップS108に於いて切り替えたレーダ検出モードに応じて、レーダ検出を実行する。
【0046】
次に、ステップS110に於いて、レーダ物体検出部211は、物体40の相対距離R、及び相対速度Vを、FMCW方式の原理に基づいて、角度θを例えばDBF(Digital Beam Forming)方式の原理に基づいて算出する。
【0047】
最後に、ステップS111に於いて、レーダ20は、検出した個々の物体40について、車両との距離R、相対速度V、水平方向角度θ、種類K等の測定結果を車両制御部30に出力する。
【0048】
以上のように、この発明の実施の形態1による物体検出装置によれば、物体の種類が歩行者である場合、車両に搭載されたレーダの距離分解能や速度分解能や角度分解能を高くすることで、反射強度が低い歩行者と反射強度が強い車両が存在しても、歩行者の反射強度が車両の反射強度に吸収されず、歩行者を検出することができ、又、送信電力や受信ゲインを大きくしたり、送信アンテナを高ゲインアンテナに切り替えることで、歩行者のような低反射物体を検出することができる。
【0049】
実施の形態2.
前述の実施の形態1ではレーダ方式をFMCW方式としていたが、実施の形態2は、レーダ方式をパルス方式とし、送信信号の切り替えをスイッチにより行うようにしたものである。
【0050】
以下、この発明の実施の形態2による物体検出装置について、図を参照しながら説明する。図5は、この発明の実施の形態2による物体検出装置を示すブロック図であり、実施の形態1と同一若しくは相当部分には同一符号を付してある。図6は、この発明の実施の形態2による物体検出装置を説明する説明図である。実施の形態2では、実施の形態1に対して距離分解能と速度分解能を高くする方法が異なるため、以下の説明では、距離分解能と速度分解能を高くする方法について説明する。その他は、実施の形態1の場合と同様である。
【0051】
図5に於いて、レーダ20は、レーダ方式としてパルス方式を用いている。スイッチ212は、分配器203と送信アンプ204との間に挿入されている。パルス方式のレーダ20は、図6に示すように、パルス変調されたパルス信号を送信信号として物体40に対して送受信し、物体40を検出する。ここで、cを光速、λを波長、Twをパルス幅、Tcをパルス観測時間とすると、距離分解能ΔRと速度分解能ΔVは、下記の式(4)、(5)により夫々表される。
【数3】
【0052】
従って、距離分解能ΔR、又は速度分解能ΔVを高くする場合、レーダ制御部200は、物体40と車両との間のおおよその距離に基づいて、レーダ20の制御電圧発生器201を制御してパルス幅Twを縮小し、又は、パルス観測時間Tcを拡大させる。これにより、歩行者と他の物体を分離検出可能な距離分解能ΔRを高め、又は、速度分解能ΔVを高め、反射強度が低い歩行者と反射強度が強い車両が存在しても、歩行者の反射強度が車両の反射強度に吸収されず、歩行者を検出することができる。
【0053】
ただし、パルス幅Twを縮小した場合、送信パワーが小さくなり、物体の最大検出距離が短くなる、又、パルス観測時間Tcを拡大した場合、全体の処理時間が長くなるので、歩行者検出モードでのみ、歩行者のおおよその距離に基づいて、パルス幅Twを縮小したり、観測時間Tcを拡大することとする。
【0054】
尚、実施の形態2による物体検出装置の動作手順を示すフローチャートは、前述の図4のフローチャートと共通するので、その説明を省略する。
【0055】
以上述べたように、この発明の実施の形態2による物体検出装置によれば、物体の種類が歩行者である場合、車両に搭載されたレーダの距離分解能と、速度分解能と、角度分解能と農地の少なくとも1つを高くすることで、反射強度が低い歩行者と反射強度が強い車両が存在しても、歩行者の反射強度が車両の反射強度に吸収されず、歩行者を検出することが出来る。又、レーダの送信電力や受信ゲインを大きくしたり、送信アンテナを高ゲインアンテナに切り替えることで、歩行者のような低反射物体を検出することができる。
【0056】
実施の形態3.
実施の形態1及び2では、レーダをミリ波レーダにより構成していたが、実施の形態3では、レーダを送信するレーザレーダにより構成したものである。
【0057】
以下、この発明の実施の形態3による物体検出装置について、図を参照しながら説明する。図7は、この発明の実施の形態3による物体検出装置を示すブロック図であり、実施の形態1と同一若しくは相当部分には同一符号を付してある。図7に於いて、物体検出装置1は、画像センサ10と、レーダ20とから構成される。画像センサ10は、カメラ100と、カメラ物体検出部101と、物体種類判定部102とを備える。レーダ20は、レーダ制御部200と、発光部213と、受光部214と、レーダ物体検出部211とを備える。レーダ20は、レーザレーダにより構成されている。30は車両制御部、40は物体である。
【0058】
実施の形態3に於いて、画像センサ10の構成及び動作は、実施の形態1の場合と同様であるため、その説明を省略する。
【0059】
レーダ20は、物体40の種類に応じて、レーダ制御部200によりレーダ検出モードを切り替える。具体的には、レーダ制御部200は、物体種類判定部102により判定された物体40の種類が歩行者の場合は、レーダ20のレーダ検出モードを歩行者検出モードに切り替え、歩行者以外の場合は、レーダ20のレーダ検出モードを通常モードに切り替える。
【0060】
ここで、歩行者検出モードについて詳細に説明する。歩行者検出モードは、通常モードに比べて、レーダ20の角度分解能を高くすること、照射出力を大きくすること、のうちの少なくとも1つを実施するレーダ検出モードである。
【0061】
最初に角度分解能を高くする方法について説明する。角度分解能を高くするために、レーダ制御部200は、レーダ20の発光部213を制御して、レーザを照射するための駆動角度の刻み、即ち照射角度単位を小さくする。これにより、歩行者と他の物体を分離検出可能な分解能に高め、歩行者を検出することが出来る。但し、駆動角度の刻みを小さくする場合、物体を検出可能な範囲(覆域)を通常モードと同一にするためには多くの時間が必要となるので、歩行者検出モードでのみ、駆動角度の刻みを小さくすることとする。
【0062】
次に照射出力を大きくする方法について説明する。照射出力を大きくするために、レーダ制御部200は、レーダ20の発光部213の増幅率を増やす。これにより、通常モードでは反射強度が低い歩行者を検出可能にする。但し、照射出力を大きくする場合、多くの物体を検出することが予想され、通常モードに比べて多くの処理時間が必要となるので、歩行者検出モードのみ変更することとする。
【0063】
レーダ制御部200により発光部213に対して照射命令が出力されると、発光部213からは、レーザが送信信号L1として出射される。一方、物体40で反射されたレーザL2は、受光部214により受信信号として受信され、レーダ物体検出部211に入力される。レーダ物体検出部211は、レーダ信号処理を実施して、物体40までの相対距離、相対速度、反射強度、水平方向角度、種類などの測定結果を算出する。レーダ物体検出部211により算出された物体40の測定結果は、車両制御部30に出力され、走行支援システムに於いて活用される。
【0064】
尚、実施の形態3による物体検出装置の動作手順を示すフローチャートは、前述の図4のフローチャートと共通するので、その説明を省略する。
【0065】
以上のように、この発明の実施の形態3による物体検出装置によれば、物体の種類が歩行者である場合、車両に搭載されたレーダの角度分解能を高くすることで、反射強度が低い歩行者と反射強度が強い車両が存在しても、歩行者の反射強度が車両の反射強度に吸収されず、歩行者を検出することが出来る。又、レーザ出力大きくすることで、歩行者のような低反射物体を検出することができる。
【0066】
尚、前述の実施の形態1、2では、物体40の距離R及び相対速度Vを検出するレーダ方式として、FMCW方式やパルス方式を用いた場合を例示したが、FMCW方式の送信信号をパルス状に区切って変調したFM−パルスドップラー方式レーダ装置やその他のレーダ方式もこの発明を適用することができる。
【0067】
又、物体40の角度θを検出する測角方式として、DBF方式を用いた場合を例示したが、その他の方式もこの発明を適用することが出来る。
【0068】
更に、レーダとして、ミリ波レーダとレーザレーダを用いた場合を例示したが、その他のレーダもこの発明を適用することが出来る。
【0069】
この発明に係る物体検出装置は、走行車両の障害となる物体の検出に有用であり、特に、歩行者などの低反射物体の検出および車両などの高反射物体の検出を確実に行いたい場合に適している。
【0070】
以上述べたこの発明の実施の形態による物体検出装置によれば、車両に搭載された画像センサによって撮像された画像に基づいて物体の種類を判定し、その判定された種類が歩行者である場合、車両に搭載されたレーダの距離分解能や速度分解能や角度分解能を高くすることで、反射強度が低い歩行者と反射強度が強い車両が存在しても、歩行者の反射強度が車両の反射強度に吸収されず、歩行者を検出することが出来る。又、レーダの送信電力や受信ゲインを大きくしたり、送信アンテナを高ゲインアンテナに切り替えることで、歩行者のような低反射物体を検出することができる。更に、レーダの閾値を反射強度が低い歩行者用に変更する必要がないので、ノイズなどにより偽像を検出することもない。
【符号の説明】
【0071】
1 物体検出装置 10 画像センサ
100 カメラ 101 カメラ物体検出部
102 物体種類判定部 20 レーダ
200 レーダ制御部 201 制御電圧発生器
202 電圧制御発振器 203 分配器
204 送信アンプ 205 送信アンテナ
206 受信アンテナ 207 ミキサ
208 受信アンプ 209 A/Dコンバータ
210 FFT 211 レーダ物体検出部
212 スイッチ 213 発光部
214 受光部 30 車両制御部
【特許請求の範囲】
【請求項1】
車両の少なくとも前方に存在する物体を検出する物体検出装置であって、
前記車両に搭載されたカメラによって撮像された画像に基づいて前記物体の種類を判定する物体種類判定部と、
前記車両に搭載された電磁波を送信するレーダの受信信号に基づいて前記物体に関する情報を検出するレーダ物体検出部と、
前記レーダを制御するレーダ制御部と、
を備え、
前記レーダ制御部は、前記物体種類判定部が判定した前記物体の種類に応じて、前記レーダの距離分解能と、速度分解能と、角度分解能と、送信電力と、受信ゲインと、送信アンテナの種類の切り替えと、のうちの少なくとも一つを制御する、
ことを特徴とする物体検出装置。
【請求項2】
前記レーダは、ミリ波レーダにより構成され、
前記レーダ制御部は、前記物体種類判定部により判定された前記物体の種類が歩行者である場合に、通常モードに比べて、前記距離分解能と、前記速度分解能と、前記角度分解能とのうちの少なくとも1つを高くする、
ことを特徴とする請求項1に記載の物体検出装置。
【請求項3】
前記レーダ制御部は、前記レーダから送信する送信信号の変調周波数幅を通常モードに比べて大きくすることにより前記距離分解能を高くする、
ことを特徴とする請求項2に記載の物体検出装置。
【請求項4】
前記レーダ制御部は、前記レーダから送信するパルス状の送信信号のパルス幅を通常モードに比べて小さくすることにより前記距離分解能を高くする、
ことを特徴とする請求項2に記載の物体検出装置。
【請求項5】
前記レーダ制御部は、前記レーダから送信する送信信号の繰返し周期を通常モードに比べて大きくすることにより前記速度分解能を高くする、
ことを特徴とする請求項2に記載の物体検出装置。
【請求項6】
前記レーダ制御部は、前記レーダから送信するパルス状の送信信号のパルス観測時間を通常モードに比べて大きくすることにより前記速度分解能を高くする、
ことを特徴とする請求項2に記載の物体検出装置。
【請求項7】
前記レーダ制御部は、前記レーダから送信する送信信号のビーム幅を通常モードより細くすることにより前記角度分解能を高くする、
ことを特徴とする請求項2に記載の物体検出装置。
【請求項8】
前記レーダは、アレイ状のアンテナ素子を備え、
前記レーダ制御部は、通常のモードに比べて前記アンテナ素子の数を多くすることにより前記ビーム幅を細くする、
ことを特徴とする請求項7に記載の物体検出装置。
【請求項9】
前記レーダは、ミリ波レーダにより構成され、
前記レーダ制御部は、前記物体種類判定部により判定された前記物体の種類が歩行者である場合に、通常モードに比べて、前記送信電力を大きくする、
ことを特徴とする請求項1に記載の物体検出装置。
【請求項10】
前記レーダは、ミリ波レーダにより構成され、
前記レーダ制御部は、前記物体種類判定部により判定された前記物体の種類が歩行者である場合に、通常モードに比べて、前記受信ゲインを大きくする、
ことを特徴とする請求項1に記載の物体検出装置。
【請求項11】
前記レーダは、ミリ波レーダにより構成され、
前記レーダ制御部は、前記物体種類判定部により判定された前記物体の種類が歩行者である場合に、通常モードに比べて、前記送信アンテナを高ゲインアンテナに切り替える、
ことを特徴とする請求項1に記載の物体検出装置。
【請求項12】
前記レーダは、ミリ波レーダにより構成され、
前記レーダ制御部は、前記物体種類判定部により判定された前記物体の種類が歩行者である場合に、通常モードに比べて、前記送信アンテナを高ゲインアンテナに切り替える、
ことを特徴とする請求項1に記載の物体検出装置。
【請求項13】
車両の少なくとも前方に存在する物体を検出する物体検出装置であって、
前記車両に搭載されたカメラによって撮像された画像に基づいて前記物体の種類を判定する物体種類判定部と、
前記車両に搭載されたレーザを送信するレーダの受信信号に基づいて前記物体に関する情報を検出するレーダ物体検出部と、
前記レーダを制御するレーダ制御部と、
を備え、
前記レーダ制御部は、前記物体種類判定部が判定した前記物体の種類に応じて、前記レーダの照射角度単位と、照射出力と、のうち少なくとも一つを制御する、
ことを特徴とする物体検出装置。
【請求項14】
前記レーダ制御部は、前記物体種類判定部により判定された前記物体の種類が歩行者である場合に、通常モードに比べて、前記照射角度単位を小さくする、
ことを特徴とする請求項13に記載の物体検出装置。
【請求項15】
前記レーダ制御部は、前記物体種類判定部により判定された前記物体の種類が歩行者である場合に、通常モードに比べて、前記照射出力を大きくする、
ことを特徴とする請求項13に記載の物体検出装置。
【請求項16】
前記カメラは、単眼カメラ、又はステレオカメラ、又は赤外線カメラである、
ことを特徴とする請求項1乃至15のうちの何れか一項に記載の物体検出装置。
【請求項1】
車両の少なくとも前方に存在する物体を検出する物体検出装置であって、
前記車両に搭載されたカメラによって撮像された画像に基づいて前記物体の種類を判定する物体種類判定部と、
前記車両に搭載された電磁波を送信するレーダの受信信号に基づいて前記物体に関する情報を検出するレーダ物体検出部と、
前記レーダを制御するレーダ制御部と、
を備え、
前記レーダ制御部は、前記物体種類判定部が判定した前記物体の種類に応じて、前記レーダの距離分解能と、速度分解能と、角度分解能と、送信電力と、受信ゲインと、送信アンテナの種類の切り替えと、のうちの少なくとも一つを制御する、
ことを特徴とする物体検出装置。
【請求項2】
前記レーダは、ミリ波レーダにより構成され、
前記レーダ制御部は、前記物体種類判定部により判定された前記物体の種類が歩行者である場合に、通常モードに比べて、前記距離分解能と、前記速度分解能と、前記角度分解能とのうちの少なくとも1つを高くする、
ことを特徴とする請求項1に記載の物体検出装置。
【請求項3】
前記レーダ制御部は、前記レーダから送信する送信信号の変調周波数幅を通常モードに比べて大きくすることにより前記距離分解能を高くする、
ことを特徴とする請求項2に記載の物体検出装置。
【請求項4】
前記レーダ制御部は、前記レーダから送信するパルス状の送信信号のパルス幅を通常モードに比べて小さくすることにより前記距離分解能を高くする、
ことを特徴とする請求項2に記載の物体検出装置。
【請求項5】
前記レーダ制御部は、前記レーダから送信する送信信号の繰返し周期を通常モードに比べて大きくすることにより前記速度分解能を高くする、
ことを特徴とする請求項2に記載の物体検出装置。
【請求項6】
前記レーダ制御部は、前記レーダから送信するパルス状の送信信号のパルス観測時間を通常モードに比べて大きくすることにより前記速度分解能を高くする、
ことを特徴とする請求項2に記載の物体検出装置。
【請求項7】
前記レーダ制御部は、前記レーダから送信する送信信号のビーム幅を通常モードより細くすることにより前記角度分解能を高くする、
ことを特徴とする請求項2に記載の物体検出装置。
【請求項8】
前記レーダは、アレイ状のアンテナ素子を備え、
前記レーダ制御部は、通常のモードに比べて前記アンテナ素子の数を多くすることにより前記ビーム幅を細くする、
ことを特徴とする請求項7に記載の物体検出装置。
【請求項9】
前記レーダは、ミリ波レーダにより構成され、
前記レーダ制御部は、前記物体種類判定部により判定された前記物体の種類が歩行者である場合に、通常モードに比べて、前記送信電力を大きくする、
ことを特徴とする請求項1に記載の物体検出装置。
【請求項10】
前記レーダは、ミリ波レーダにより構成され、
前記レーダ制御部は、前記物体種類判定部により判定された前記物体の種類が歩行者である場合に、通常モードに比べて、前記受信ゲインを大きくする、
ことを特徴とする請求項1に記載の物体検出装置。
【請求項11】
前記レーダは、ミリ波レーダにより構成され、
前記レーダ制御部は、前記物体種類判定部により判定された前記物体の種類が歩行者である場合に、通常モードに比べて、前記送信アンテナを高ゲインアンテナに切り替える、
ことを特徴とする請求項1に記載の物体検出装置。
【請求項12】
前記レーダは、ミリ波レーダにより構成され、
前記レーダ制御部は、前記物体種類判定部により判定された前記物体の種類が歩行者である場合に、通常モードに比べて、前記送信アンテナを高ゲインアンテナに切り替える、
ことを特徴とする請求項1に記載の物体検出装置。
【請求項13】
車両の少なくとも前方に存在する物体を検出する物体検出装置であって、
前記車両に搭載されたカメラによって撮像された画像に基づいて前記物体の種類を判定する物体種類判定部と、
前記車両に搭載されたレーザを送信するレーダの受信信号に基づいて前記物体に関する情報を検出するレーダ物体検出部と、
前記レーダを制御するレーダ制御部と、
を備え、
前記レーダ制御部は、前記物体種類判定部が判定した前記物体の種類に応じて、前記レーダの照射角度単位と、照射出力と、のうち少なくとも一つを制御する、
ことを特徴とする物体検出装置。
【請求項14】
前記レーダ制御部は、前記物体種類判定部により判定された前記物体の種類が歩行者である場合に、通常モードに比べて、前記照射角度単位を小さくする、
ことを特徴とする請求項13に記載の物体検出装置。
【請求項15】
前記レーダ制御部は、前記物体種類判定部により判定された前記物体の種類が歩行者である場合に、通常モードに比べて、前記照射出力を大きくする、
ことを特徴とする請求項13に記載の物体検出装置。
【請求項16】
前記カメラは、単眼カメラ、又はステレオカメラ、又は赤外線カメラである、
ことを特徴とする請求項1乃至15のうちの何れか一項に記載の物体検出装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−57584(P2013−57584A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−195831(P2011−195831)
【出願日】平成23年9月8日(2011.9.8)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月8日(2011.9.8)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]