
物体検知装置、物体検知方法及びプログラム
【課題】撮像手段の撮像方向の変更が行われた場合でも、物体検知の誤検知の防止を低コストで実現することを目的とする。
【解決手段】検知手段は、物体領域の検知中に撮像手段の撮像方向の変更が行われると、撮像方向の変更中は物体検知の処理を中断し、撮像方向の変更が終了すると物体検知の処理を再開し、作成手段は、検知手段における物体検知の処理の再開の後の検知結果に応じて物体領域検知用の画像を初期化することによって課題を解決する。
【解決手段】検知手段は、物体領域の検知中に撮像手段の撮像方向の変更が行われると、撮像方向の変更中は物体検知の処理を中断し、撮像方向の変更が終了すると物体検知の処理を再開し、作成手段は、検知手段における物体検知の処理の再開の後の検知結果に応じて物体領域検知用の画像を初期化することによって課題を解決する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体検知装置、物体検知方法及びプログラムに関する。
【背景技術】
【0002】
従来、背景差分法と呼ばれる画像処理手法を用いることによって、移動物を自動的に抽出する例が有る(例えば、特許文献1参照)。
また、パン、チルト、ズーム等の機能を備えた監視カメラで撮像した画像信号を用いて、パン、チルト、ズーム駆動後、プリセットの背景画像と入力画像とを比較して進入物の検知を行う従来例もある(例えば、特許文献2参照)。
また、背景差分法の進入物体検知において、背景の位置ずれが起きたときに、撮影画像と背景画像とのずれ量を算出し、アフィン変換によってずれを補正した後に動体検知を行う従来例もある。(例えば、特許文献3参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−155463号公報
【特許文献2】特開2002−051329号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の従来例では、撮影範囲がほぼ固定された状態で画像を連続的に撮影するという条件で動作するものである。したがって、例えば定期巡回撮影のような目的で、物体検知の途中でパン、チルト、ズームの操作が行われるケースへの対応は想定されていない。
特許文献2の従来例では、パン、チルト、ズーム駆動後、プリセットの背景画像と入力画像とを比較して進入物の検知を行う。しかしながら、パン、チルト、ズーム駆動の精度については考慮されておらず、正確に駆動できなかった場合には、画面全体に差分ができてしまい、誤検知をしてしまう。
特許文献3の従来例では、背景の位置ずれが起きたときに、背景画像のずれ量を算出し、アフィン変換によってずれを補正した後に動体検知を行う。しかしながら、リアルタイムで毎フレーム背景画像のずれ量を算出、及び入力画像全体のアフィン変換を行うのは、回路規模、消費電力の面で高いコストがかかる。
【0005】
本発明はこのような問題点に鑑みなされたもので、撮像手段の撮像方向の変更が行われた場合でも、物体検知の誤検知の防止を低コストで実現することを目的とする。
【課題を解決するための手段】
【0006】
そこで、本発明の物体検知装置は、撮像手段で撮像された画像から物体領域検知用の画像を作成する作成手段と、前記物体領域検知用の画像を記憶する記憶手段と、前記撮像された画像と前記物体領域検知用の画像とから前記画像の変化領域を物体領域として検知する検知手段と、を有し、前記検知手段は、前記物体領域の検知中に前記撮像手段の撮像方向の変更が行われると、撮像方向の変更中は物体検知の処理を中断し、撮像方向の変更が終了すると物体検知の処理を再開し、前記作成手段は、前記検知手段における前記物体検知の処理の再開の後の検知結果に応じて前記物体領域検知用の画像を初期化する。
【発明の効果】
【0007】
本発明によれば、撮像手段の撮像方向の変更が行われた場合でも、物体検知の誤検知の防止を低コストで実現することができる。
【図面の簡単な説明】
【0008】
【図1】実施形態1の監視カメラ装置の構成の一例を示す図である。
【図2】物体検知処理の処理手順を示すフローチャートである。
【図3】物体が検知される画像例を示した図である。
【図4】定期巡回撮影のパン処理によって誤差が生じたことが検知される画像例を示した図である。
【図5】実施形態2の監視カメラ装置の構成の一例を示す図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について図面に基づいて説明する。
【0010】
<実施形態1>
図1乃至図4は、実施形態1の監視カメラ装置を説明する図である。本実施形態の監視カメラ装置は、背景差分法により物体を検知し、物体が検知されると検知情報をネットワーク経由で通知する。また、監視カメラ装置は、物体検知の合間に、定期的にパン、チルト、ズーム動作による定期巡回撮影を行う機能も持つ。
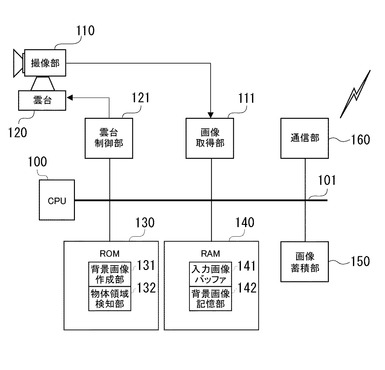
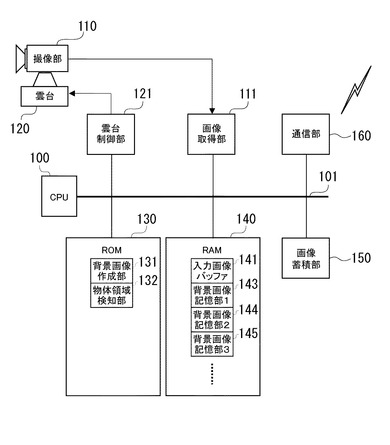
図1は、実施形態1の監視カメラ装置の構成の一例を示す図である。
Central Processing Unit(CPU)100は、監視カメラ装置全体の制御を行う。システムバス101は、CPU100とその他のブロックとが接続され、データやコマンドをやりとりする。撮像部110は、光学画像をデジタル画像に変換する。画像は、画像取得部111を通して取り込まれる。この撮像部110には、撮像倍率を変更するズームレンズも含む。雲台120は、撮像部110の撮像方向を変更する為のパン、チルト動作の機構を持つ。この雲台120は、雲台制御部121によって制御される。Read Only Memory(ROM)130は、CPU100が制御を行う為のプログラムやパラメータを格納する。このROM130には、後述する背景画像作成部131、物体領域検知部132のプログラムを含んでいる。Random Access Memory(RAM)140は、データを一時記憶する。このRAM140内には、入力画像バッファ141、背景画像記憶部142が含まれる。画像蓄積部150は、入力画像に圧縮処理を行った結果の画像を蓄積する。通信部160は、インターネットを通じて本監視カメラ装置の制御を行う指示を受け取ったり、リアルタイムの入力画像や画像蓄積部の画像を配信したり、物体検知のイベントを通知したりする。
【0011】
上記構成上でのデータの流れを以下に説明する。
動画像の撮影では、撮像部110からの入力画像が、画像取得部111を通じて入力画像バッファ141に取り込まれる。次に入力画像バッファ141のデータはCPU100によって圧縮処理が行われ、画像蓄積部150に格納される。
物体検知処理では、まず、背景画像作成部131によって入力画像バッファ141のデータから背景画像が作成され、背景画像記憶部142に記憶される。この背景画像作成の方法については、前述の従来例である特許文献1に示されている方法等複数あるが、どのような方法によって背景画像を作成してもよい。本実施形態では背景画像としているが、複数画素からなる小エリアの平均や周波数成分等を用いた基準モデルを用いてもよい。つまり、背景画像、基準モデルは、物体領域検知用の画像の一例である。背景画像が作成された次のフレームから、物体領域検知部132によって、入力画像バッファ141のデータと背景画像記憶部142のデータとを用いて、物体領域の検知が行われる。この物体領域の検知処理では、画像に変化が見られる部分を抽出後、近接したエリアをまとめるグルーピングの処理や、ノイズと見られる小エリアを削除する処理等が行われる。
【0012】
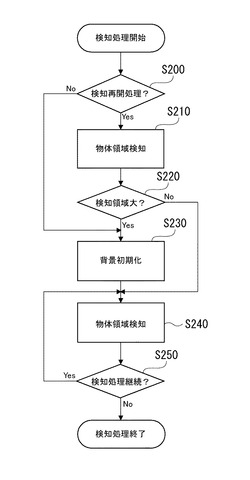
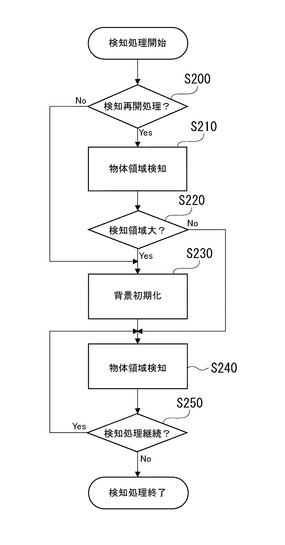
図2は、物体検知処理の処理手順を示すフローチャートである。
本実施形態における物体検知処理は、通信部160を通したコマンドによって、物体検知処理の開始が指示されることにより開始する。また、物体検知処理中(検知中)に定期巡回撮影が割り込まれた場合には、巡回に伴うパン、チルト、ズーム処理の前に物体検知処理を中断し、巡回撮影後に元の位置に戻ってから物体検知処理が再開される。つまり、撮像方向等の変更中は物体検知の処理は中断される。
ステップS200では、CPU100は、コマンド指示による物体検知処理の開始か、定期巡回撮影が終了したことによる物体検知の再開かを判定する。コマンド指示による物体検知処理の開始の場合は、ステップS210とステップS220との処理はスキップされ、ステップS230へと制御が移る。物体検知の再開の場合は、ステップS210で、CPU100(物体領域検知部132)は、画像の変化領域を物体領域として検知する物体領域検知処理を行う。
ステップS220では、CPU100(物体領域検知部132)は、ステップS210の結果を受け、物体領域の面積の合計が所定の面積以上であるかどうかの判定を行う。CPU100(物体領域検知部132)は、物体領域の面積の合計が所定の面積以上である場合は、定期巡回撮影時のパン、チルト、ズーム処理後に元の位置に戻る際、誤差が生じて背景画像記憶部142の画像の撮影時とずれていると判断する。この場合、ステップS230で、CPU100(背景画像作成部131)は、背景画像記憶部142の背景画像の初期化を行う。CPU100(物体領域検知部132)は、物体領域の面積の合計が所定の面積以下であった場合には、そのまま検知結果とする。定期巡回撮影前の背景画像がそのまま使用できた場合には、定期巡回撮影中に進入してきた物体の検知も可能となる。
【0013】
ステップS220の判定で用いる所定の面積以上か否かの判定では、例えば画面の全面積の30%という固定値とする方法や、通信部160を通したコマンドでその閾値を指示するといった方法等を取ることが可能である。本実施形態では、閾値が30%と設定されているものとする。
次のフレームの取り込み後は、ステップS240でCPU100(物体領域検知部132)は、ステップS210と同様な物体領域検知処理を行う。ステップS250では、CPU100は、物体領域検知処理を継続するかどうか判定し、継続する場合にはステップS240へと戻る。物体領域検知処理の終了は、通信部160を通したコマンドの指示によるケースと、定期巡回撮影の開始によるケースとが含まれる。
【0014】
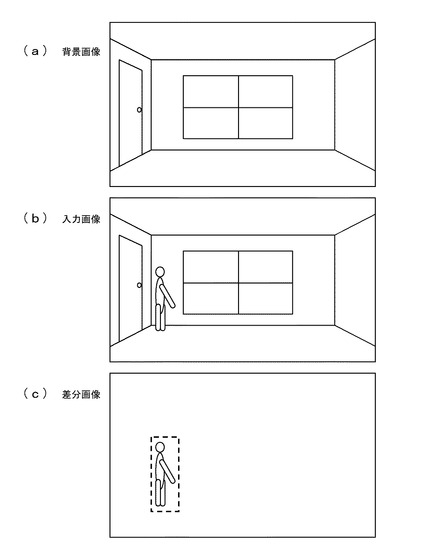
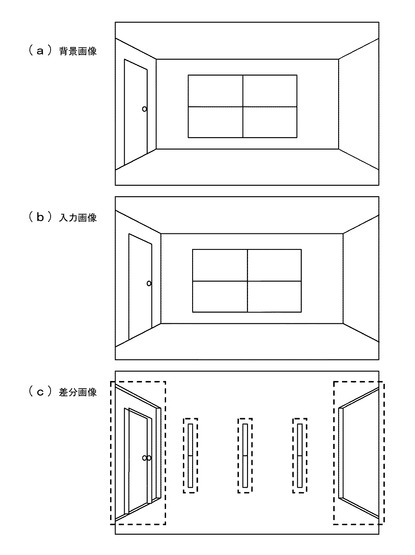
図3は、物体が検知される画像例を示した図である。
図3の(a)は、背景画像記憶部142に記憶されている背景画像の例である。このとき、図3の(b)のような入力画像があると、物体領域検知部132による検知結果として図3の(c)に示すような差分画像が得られる。図3の(c)の破線で示されたエリアが検知された物体を示すエリアである。この様に物体が検知されると、物体検知イベントが通信部160を通して通知される。
【0015】
図4は、定期巡回撮影のパン処理によって誤差が生じたことが検知される画像例を示した図である。
図4の(a)は、定期巡回撮影前の背景画像記憶部142に記憶されている背景画像の例である。図4の(b)は、定期巡回撮影後、物体検知処理が再開されたときの最初の入力画像の例である。この図では、カメラが元の位置より少し左に向いてしまっている。図4の(c)は、物体領域検知部132による検知結果である。カメラ位置に誤差が生じたため、破線で示したように5つの物体として検知されている。この5つの領域の面積を合計すると、画面全体の約40%となり、閾値である30%を超えている為、背景画像記憶部142の初期化が行われ、物体検知イベントの通知も抑制される。
【0016】
<実施形態2>
図5は、実施形態2の監視カメラ装置の構成の一例を示す図である。本実施形態の監視カメラ装置は、パン、チルト、ズーム動作により、複数ポイントでの物体検知を行うものである。
図5は、実施形態1の図1と比較して、図1の背景画像記憶部142の部分が、背景画像記憶部1〜3(143、144、145、…)と複数になっている。これは、複数ポイントでの物体検知を行う為に、複数のポイントそれぞれに対応した背景画像を記憶しておけるようにするためである。図5のその他の構成については図1と同様である為、説明を省略する。
図2のフローチャートに関しても、本実施形態にそのままあてはまる。実施形態1で背景画像記憶部142を指している部分は、本実施形態では、検知のポイントに応じて背景画像記憶部1〜3(143、144、145、…)のそれぞれが対応する。図2のステップS230での背景画像記憶部初期化に関しても、全ての背景画像記憶部を初期化する必要は無く、検知のポイントに対応する箇所のみでよい。
本実施形態では、複数ポイントに応じた背景画像記憶部を用いるにより、複数ポイントでの物体検知が可能となっている。
【0017】
<その他の実施形態>
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(又はCPUやMPU等)がプログラムを読み出して実行する処理である。
【0018】
以上、上述した各実施形態によれば、パン、チルト、ズーム処理によって元の位置に正確に戻れなかった場合にも、背景画像の学習をクリアする。このことによって、誤検知を防止することが可能な物体検知処理を、画面全体のアフィン変換のような高いコストをかけずに実現することができる。
【0019】
以上、本発明の好ましい実施形態について詳述したが、本発明は係る特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。
【符号の説明】
【0020】
100 CPU
【技術分野】
【0001】
本発明は、物体検知装置、物体検知方法及びプログラムに関する。
【背景技術】
【0002】
従来、背景差分法と呼ばれる画像処理手法を用いることによって、移動物を自動的に抽出する例が有る(例えば、特許文献1参照)。
また、パン、チルト、ズーム等の機能を備えた監視カメラで撮像した画像信号を用いて、パン、チルト、ズーム駆動後、プリセットの背景画像と入力画像とを比較して進入物の検知を行う従来例もある(例えば、特許文献2参照)。
また、背景差分法の進入物体検知において、背景の位置ずれが起きたときに、撮影画像と背景画像とのずれ量を算出し、アフィン変換によってずれを補正した後に動体検知を行う従来例もある。(例えば、特許文献3参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−155463号公報
【特許文献2】特開2002−051329号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の従来例では、撮影範囲がほぼ固定された状態で画像を連続的に撮影するという条件で動作するものである。したがって、例えば定期巡回撮影のような目的で、物体検知の途中でパン、チルト、ズームの操作が行われるケースへの対応は想定されていない。
特許文献2の従来例では、パン、チルト、ズーム駆動後、プリセットの背景画像と入力画像とを比較して進入物の検知を行う。しかしながら、パン、チルト、ズーム駆動の精度については考慮されておらず、正確に駆動できなかった場合には、画面全体に差分ができてしまい、誤検知をしてしまう。
特許文献3の従来例では、背景の位置ずれが起きたときに、背景画像のずれ量を算出し、アフィン変換によってずれを補正した後に動体検知を行う。しかしながら、リアルタイムで毎フレーム背景画像のずれ量を算出、及び入力画像全体のアフィン変換を行うのは、回路規模、消費電力の面で高いコストがかかる。
【0005】
本発明はこのような問題点に鑑みなされたもので、撮像手段の撮像方向の変更が行われた場合でも、物体検知の誤検知の防止を低コストで実現することを目的とする。
【課題を解決するための手段】
【0006】
そこで、本発明の物体検知装置は、撮像手段で撮像された画像から物体領域検知用の画像を作成する作成手段と、前記物体領域検知用の画像を記憶する記憶手段と、前記撮像された画像と前記物体領域検知用の画像とから前記画像の変化領域を物体領域として検知する検知手段と、を有し、前記検知手段は、前記物体領域の検知中に前記撮像手段の撮像方向の変更が行われると、撮像方向の変更中は物体検知の処理を中断し、撮像方向の変更が終了すると物体検知の処理を再開し、前記作成手段は、前記検知手段における前記物体検知の処理の再開の後の検知結果に応じて前記物体領域検知用の画像を初期化する。
【発明の効果】
【0007】
本発明によれば、撮像手段の撮像方向の変更が行われた場合でも、物体検知の誤検知の防止を低コストで実現することができる。
【図面の簡単な説明】
【0008】
【図1】実施形態1の監視カメラ装置の構成の一例を示す図である。
【図2】物体検知処理の処理手順を示すフローチャートである。
【図3】物体が検知される画像例を示した図である。
【図4】定期巡回撮影のパン処理によって誤差が生じたことが検知される画像例を示した図である。
【図5】実施形態2の監視カメラ装置の構成の一例を示す図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について図面に基づいて説明する。
【0010】
<実施形態1>
図1乃至図4は、実施形態1の監視カメラ装置を説明する図である。本実施形態の監視カメラ装置は、背景差分法により物体を検知し、物体が検知されると検知情報をネットワーク経由で通知する。また、監視カメラ装置は、物体検知の合間に、定期的にパン、チルト、ズーム動作による定期巡回撮影を行う機能も持つ。
図1は、実施形態1の監視カメラ装置の構成の一例を示す図である。
Central Processing Unit(CPU)100は、監視カメラ装置全体の制御を行う。システムバス101は、CPU100とその他のブロックとが接続され、データやコマンドをやりとりする。撮像部110は、光学画像をデジタル画像に変換する。画像は、画像取得部111を通して取り込まれる。この撮像部110には、撮像倍率を変更するズームレンズも含む。雲台120は、撮像部110の撮像方向を変更する為のパン、チルト動作の機構を持つ。この雲台120は、雲台制御部121によって制御される。Read Only Memory(ROM)130は、CPU100が制御を行う為のプログラムやパラメータを格納する。このROM130には、後述する背景画像作成部131、物体領域検知部132のプログラムを含んでいる。Random Access Memory(RAM)140は、データを一時記憶する。このRAM140内には、入力画像バッファ141、背景画像記憶部142が含まれる。画像蓄積部150は、入力画像に圧縮処理を行った結果の画像を蓄積する。通信部160は、インターネットを通じて本監視カメラ装置の制御を行う指示を受け取ったり、リアルタイムの入力画像や画像蓄積部の画像を配信したり、物体検知のイベントを通知したりする。
【0011】
上記構成上でのデータの流れを以下に説明する。
動画像の撮影では、撮像部110からの入力画像が、画像取得部111を通じて入力画像バッファ141に取り込まれる。次に入力画像バッファ141のデータはCPU100によって圧縮処理が行われ、画像蓄積部150に格納される。
物体検知処理では、まず、背景画像作成部131によって入力画像バッファ141のデータから背景画像が作成され、背景画像記憶部142に記憶される。この背景画像作成の方法については、前述の従来例である特許文献1に示されている方法等複数あるが、どのような方法によって背景画像を作成してもよい。本実施形態では背景画像としているが、複数画素からなる小エリアの平均や周波数成分等を用いた基準モデルを用いてもよい。つまり、背景画像、基準モデルは、物体領域検知用の画像の一例である。背景画像が作成された次のフレームから、物体領域検知部132によって、入力画像バッファ141のデータと背景画像記憶部142のデータとを用いて、物体領域の検知が行われる。この物体領域の検知処理では、画像に変化が見られる部分を抽出後、近接したエリアをまとめるグルーピングの処理や、ノイズと見られる小エリアを削除する処理等が行われる。
【0012】
図2は、物体検知処理の処理手順を示すフローチャートである。
本実施形態における物体検知処理は、通信部160を通したコマンドによって、物体検知処理の開始が指示されることにより開始する。また、物体検知処理中(検知中)に定期巡回撮影が割り込まれた場合には、巡回に伴うパン、チルト、ズーム処理の前に物体検知処理を中断し、巡回撮影後に元の位置に戻ってから物体検知処理が再開される。つまり、撮像方向等の変更中は物体検知の処理は中断される。
ステップS200では、CPU100は、コマンド指示による物体検知処理の開始か、定期巡回撮影が終了したことによる物体検知の再開かを判定する。コマンド指示による物体検知処理の開始の場合は、ステップS210とステップS220との処理はスキップされ、ステップS230へと制御が移る。物体検知の再開の場合は、ステップS210で、CPU100(物体領域検知部132)は、画像の変化領域を物体領域として検知する物体領域検知処理を行う。
ステップS220では、CPU100(物体領域検知部132)は、ステップS210の結果を受け、物体領域の面積の合計が所定の面積以上であるかどうかの判定を行う。CPU100(物体領域検知部132)は、物体領域の面積の合計が所定の面積以上である場合は、定期巡回撮影時のパン、チルト、ズーム処理後に元の位置に戻る際、誤差が生じて背景画像記憶部142の画像の撮影時とずれていると判断する。この場合、ステップS230で、CPU100(背景画像作成部131)は、背景画像記憶部142の背景画像の初期化を行う。CPU100(物体領域検知部132)は、物体領域の面積の合計が所定の面積以下であった場合には、そのまま検知結果とする。定期巡回撮影前の背景画像がそのまま使用できた場合には、定期巡回撮影中に進入してきた物体の検知も可能となる。
【0013】
ステップS220の判定で用いる所定の面積以上か否かの判定では、例えば画面の全面積の30%という固定値とする方法や、通信部160を通したコマンドでその閾値を指示するといった方法等を取ることが可能である。本実施形態では、閾値が30%と設定されているものとする。
次のフレームの取り込み後は、ステップS240でCPU100(物体領域検知部132)は、ステップS210と同様な物体領域検知処理を行う。ステップS250では、CPU100は、物体領域検知処理を継続するかどうか判定し、継続する場合にはステップS240へと戻る。物体領域検知処理の終了は、通信部160を通したコマンドの指示によるケースと、定期巡回撮影の開始によるケースとが含まれる。
【0014】
図3は、物体が検知される画像例を示した図である。
図3の(a)は、背景画像記憶部142に記憶されている背景画像の例である。このとき、図3の(b)のような入力画像があると、物体領域検知部132による検知結果として図3の(c)に示すような差分画像が得られる。図3の(c)の破線で示されたエリアが検知された物体を示すエリアである。この様に物体が検知されると、物体検知イベントが通信部160を通して通知される。
【0015】
図4は、定期巡回撮影のパン処理によって誤差が生じたことが検知される画像例を示した図である。
図4の(a)は、定期巡回撮影前の背景画像記憶部142に記憶されている背景画像の例である。図4の(b)は、定期巡回撮影後、物体検知処理が再開されたときの最初の入力画像の例である。この図では、カメラが元の位置より少し左に向いてしまっている。図4の(c)は、物体領域検知部132による検知結果である。カメラ位置に誤差が生じたため、破線で示したように5つの物体として検知されている。この5つの領域の面積を合計すると、画面全体の約40%となり、閾値である30%を超えている為、背景画像記憶部142の初期化が行われ、物体検知イベントの通知も抑制される。
【0016】
<実施形態2>
図5は、実施形態2の監視カメラ装置の構成の一例を示す図である。本実施形態の監視カメラ装置は、パン、チルト、ズーム動作により、複数ポイントでの物体検知を行うものである。
図5は、実施形態1の図1と比較して、図1の背景画像記憶部142の部分が、背景画像記憶部1〜3(143、144、145、…)と複数になっている。これは、複数ポイントでの物体検知を行う為に、複数のポイントそれぞれに対応した背景画像を記憶しておけるようにするためである。図5のその他の構成については図1と同様である為、説明を省略する。
図2のフローチャートに関しても、本実施形態にそのままあてはまる。実施形態1で背景画像記憶部142を指している部分は、本実施形態では、検知のポイントに応じて背景画像記憶部1〜3(143、144、145、…)のそれぞれが対応する。図2のステップS230での背景画像記憶部初期化に関しても、全ての背景画像記憶部を初期化する必要は無く、検知のポイントに対応する箇所のみでよい。
本実施形態では、複数ポイントに応じた背景画像記憶部を用いるにより、複数ポイントでの物体検知が可能となっている。
【0017】
<その他の実施形態>
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(又はCPUやMPU等)がプログラムを読み出して実行する処理である。
【0018】
以上、上述した各実施形態によれば、パン、チルト、ズーム処理によって元の位置に正確に戻れなかった場合にも、背景画像の学習をクリアする。このことによって、誤検知を防止することが可能な物体検知処理を、画面全体のアフィン変換のような高いコストをかけずに実現することができる。
【0019】
以上、本発明の好ましい実施形態について詳述したが、本発明は係る特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。
【符号の説明】
【0020】
100 CPU
【特許請求の範囲】
【請求項1】
撮像手段で撮像された画像から物体領域検知用の画像を作成する作成手段と、
前記物体領域検知用の画像を記憶する記憶手段と、
前記撮像された画像と前記物体領域検知用の画像とから前記画像の変化領域を物体領域として検知する検知手段と、
を有し、
前記検知手段は、前記物体領域の検知中に前記撮像手段の撮像方向の変更が行われると、撮像方向の変更中は物体検知の処理を中断し、撮像方向の変更が終了すると物体検知の処理を再開し、
前記作成手段は、前記検知手段における前記物体検知の処理の再開の後の検知結果に応じて前記物体領域検知用の画像を初期化する物体検知装置。
【請求項2】
前記作成手段は、前記検知手段における前記物体検知の処理の再開の後の検知結果の物体領域の面積が所定の面積以上の場合に前記物体領域検知用の画像を初期化する請求項1記載の物体検知装置。
【請求項3】
前記物体領域検知用の画像とは、背景画像、又は基準モデルである請求項1又は2記載の物体検知装置。
【請求項4】
物体検知装置が実行する物体検知方法であって、
撮像手段で撮像された画像から物体領域検知用の画像を作成する作成ステップと、
前記物体領域検知用の画像を記憶する記憶ステップと、
前記撮像された画像と前記物体領域検知用の画像とから前記画像の変化領域を物体領域として検知する検知ステップと、
を含み、
前記検知ステップでは、前記物体領域の検知中に前記撮像手段の撮像方向の変更が行われると、撮像方向の変更中は物体検知の処理を中断し、撮像方向の変更が終了すると物体検知の処理を再開し、
前記作成ステップでは、前記検知ステップにおける前記物体検知の処理の再開の後の検知結果に応じて前記物体領域検知用の画像を初期化する物体検知方法。
【請求項5】
コンピュータに、
撮像手段で撮像された画像から物体領域検知用の画像を作成する作成ステップと、
前記物体領域検知用の画像を記憶する記憶ステップと、
前記撮像された画像と前記物体領域検知用の画像とから前記画像の変化領域を物体領域として検知する検知ステップと、
を実行させ、
前記検知ステップでは、前記物体領域の検知中に前記撮像手段の撮像方向の変更が行われると、撮像方向の変更中は物体検知の処理を中断し、撮像方向の変更が終了すると物体検知の処理を再開し、
前記作成ステップでは、前記検知ステップにおける前記物体検知の処理の再開の後の検知結果に応じて前記物体領域検知用の画像を初期化するプログラム。
【請求項1】
撮像手段で撮像された画像から物体領域検知用の画像を作成する作成手段と、
前記物体領域検知用の画像を記憶する記憶手段と、
前記撮像された画像と前記物体領域検知用の画像とから前記画像の変化領域を物体領域として検知する検知手段と、
を有し、
前記検知手段は、前記物体領域の検知中に前記撮像手段の撮像方向の変更が行われると、撮像方向の変更中は物体検知の処理を中断し、撮像方向の変更が終了すると物体検知の処理を再開し、
前記作成手段は、前記検知手段における前記物体検知の処理の再開の後の検知結果に応じて前記物体領域検知用の画像を初期化する物体検知装置。
【請求項2】
前記作成手段は、前記検知手段における前記物体検知の処理の再開の後の検知結果の物体領域の面積が所定の面積以上の場合に前記物体領域検知用の画像を初期化する請求項1記載の物体検知装置。
【請求項3】
前記物体領域検知用の画像とは、背景画像、又は基準モデルである請求項1又は2記載の物体検知装置。
【請求項4】
物体検知装置が実行する物体検知方法であって、
撮像手段で撮像された画像から物体領域検知用の画像を作成する作成ステップと、
前記物体領域検知用の画像を記憶する記憶ステップと、
前記撮像された画像と前記物体領域検知用の画像とから前記画像の変化領域を物体領域として検知する検知ステップと、
を含み、
前記検知ステップでは、前記物体領域の検知中に前記撮像手段の撮像方向の変更が行われると、撮像方向の変更中は物体検知の処理を中断し、撮像方向の変更が終了すると物体検知の処理を再開し、
前記作成ステップでは、前記検知ステップにおける前記物体検知の処理の再開の後の検知結果に応じて前記物体領域検知用の画像を初期化する物体検知方法。
【請求項5】
コンピュータに、
撮像手段で撮像された画像から物体領域検知用の画像を作成する作成ステップと、
前記物体領域検知用の画像を記憶する記憶ステップと、
前記撮像された画像と前記物体領域検知用の画像とから前記画像の変化領域を物体領域として検知する検知ステップと、
を実行させ、
前記検知ステップでは、前記物体領域の検知中に前記撮像手段の撮像方向の変更が行われると、撮像方向の変更中は物体検知の処理を中断し、撮像方向の変更が終了すると物体検知の処理を再開し、
前記作成ステップでは、前記検知ステップにおける前記物体検知の処理の再開の後の検知結果に応じて前記物体領域検知用の画像を初期化するプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−227780(P2012−227780A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−94266(P2011−94266)
【出願日】平成23年4月20日(2011.4.20)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年4月20日(2011.4.20)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]