
物体検知装置
【課題】 物体を検知できなくなったときに該物体のデータを予測して補完する外挿処理の許可回数を適切に設定する。
【解決手段】 同一性判定手段M3は今回の検知時における予測された相対関係と算出された相対関係と比較することで、前回検知した物体および今回検知した物体の同一性を判定し、制御対象物体認識手段M4は同一であると判定された回数が判定回数に達した物体を制御対象物体であると認識する。その際に、外挿手段M5は、前回まで制御対象物体と認識されていた物体と同一であると判定される物体が検知されない場合に、相対関係予測手段M2により予測された物体を実際に検知されたものとして所定の外挿回数だけ外挿を行うとともに、同一性判定手段M3により同一であると判定された回数に比例して前記外挿回数を増加させるので、実際に物体をロストした場合に外挿が必要以上に継続されてロストした物体を対象とする不適切な制御が行われるのを防止することができる。
【解決手段】 同一性判定手段M3は今回の検知時における予測された相対関係と算出された相対関係と比較することで、前回検知した物体および今回検知した物体の同一性を判定し、制御対象物体認識手段M4は同一であると判定された回数が判定回数に達した物体を制御対象物体であると認識する。その際に、外挿手段M5は、前回まで制御対象物体と認識されていた物体と同一であると判定される物体が検知されない場合に、相対関係予測手段M2により予測された物体を実際に検知されたものとして所定の外挿回数だけ外挿を行うとともに、同一性判定手段M3により同一であると判定された回数に比例して前記外挿回数を増加させるので、実際に物体をロストした場合に外挿が必要以上に継続されてロストした物体を対象とする不適切な制御が行われるのを防止することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体検知手段で物体を検知できなくなったときに該物体のデータを予測して補完する外挿処理を行う物体検知装置に関する。
【背景技術】
【0002】
レーダー装置により一定時間間隔で検知された物体が自車を制御するための認識物体であるか否かを判定するものにおいて、認識物体が一時的に非検知状態(ロスト状態)になると消失物体として登録し、その後に再検知された物体が消失物体と履歴接続のある物体であれば再検知された物体を直ちに認識物体として登録して消失物体の登録を削除し、また消失物体と履歴接続のある物体が検知されない場合には、消失物体が登録されてから所定の消失猶予(外挿)サイクルの間だけ消失物体の登録を維持するものが、下記特許文献1により公知である。
【特許文献1】特開2004−226120号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、上記特許文献1に記載されたものは、消失物体が登録されている消失猶予サイクルの期間が一定に設定されているため、長期間に亘って安定して検知されてきた認識物体がロストした場合に適した充分に長い消失猶予サイクルを設定すると、短期間しか検知されていない不安定な認識物体がロストした場合に過大な消失猶予サイクルが設定されてしまい、信頼度の低い消失物体を制御対象とする不適切な制御が継続されてしまう可能性があった。
【0004】
本発明は前述の事情に鑑みてなされたもので、物体を検知できなくなったときに該物体のデータを予測して補完する外挿処理の許可回数を適切に設定することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、請求項1に記載された発明によれば、自車の進行方向の所定の検知領域に存在する物体を所定時間毎に検知する物体検知手段と、前記物体検知手段の検知結果に基づいて自車と物体との相対位置および相対速よりなる相対関係を算出する相対関係算出手段と、前回の検知時において相対関係算出手段により算出された相対関係から今回の検知時における相対関係を予測する相対関係予測手段と、前記相対関係予測手段により予測された今回の検知時における相対関係を前記相対関係算出手段により算出された今回の検知時における相対関係と比較することで、前回検知した物体および今回検知した物体の同一性を判定する同一性判定手段と、前記同一性判定手段により同一であると判定された回数が判定回数に達した物体を制御対象物体であると認識する制御対象物体認識手段と、前回まで制御対象物体と認識されていた物体と同一であると判定される物体が検知されない場合に、前記相対関係予測手段により予測された物体を実際に検知されたものとして所定の外挿回数だけ外挿を行う外挿手段とを備えた物体検知装置において、前記外挿手段は、前記同一性判定手段により同一であると判定された回数に比例して前記外挿回数を増加させることを特徴とする物体検知装置が提案される。
【0006】
また請求項2に記載された発明によれば、請求項1の構成に加えて、自車走行路の曲率半径を推定する曲率半径推定手段を備え、前記外挿手段は前記曲率半径推定手段により推定された曲率半径の減少に比例して前記外挿回数を増加させることを特徴とする物体検知装置が提案される。
【0007】
また請求項3に記載された発明によれば、請求項1または請求項2の構成に加えて、自車走行路の勾配を推定する勾配推定手段を備え、前記外挿手段は前記勾配推定手段により推定された勾配の増加に比例して前記外挿回数を増加させることを特徴とする物体検知装置が提案される。
【発明の効果】
【0008】
請求項1の構成によれば、物体検知手段は自車の進行方向の所定の検知領域に存在する物体を所定時間毎に検知し、相対関係算出手段は物体検知手段の検知結果に基づいて自車と物体との相対位置および相対速よりなる相対関係を算出し、相対関係予測手段は相対関係算出手段により算出された物体の前回の検知時における相対関係に基づいて今回の検知時における相対関係を予測する。同一性判定手段は今回の検知時における予測された相対関係と算出された相対関係と比較することで、前回検知した物体および今回検知した物体の同一性を判定し、制御対象物体認識手段は同一性判定手段により同一であると判定された回数が判定回数に達した物体を制御対象物体であると認識する。その際に、外挿手段は、前回まで制御対象物体と認識されていた物体と同一であると判定される物体が検知されない場合に、相対関係予測手段により予測された物体を実際に検知されたものとして所定の外挿回数だけ外挿を行うとともに、同一性判定手段により同一であると判定された回数に比例して前記外挿回数を増加させるので、実際に物体をロストした場合に外挿が必要以上に継続されてロストした物体を対象とする不適切な制御が行われるのを防止することができる。
【0009】
また請求項2の構成によれば、曲率半径推定手段が自車走行路の曲率半径を推定すると、外挿手段が前記曲率半径の減少に比例して外挿回数を増加させるので、物体をロストし易いカーブで外挿回数を増やして物体をロストし難くすることができる。
【0010】
また請求項3の構成によれば、勾配推定手段が自車走行路の勾配を推定すると、外挿手段が前記勾配の増加に比例して外挿回数を増加させるので、物体をロストし易い坂道で外挿回数を増やして物体をロストし難くすることができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明の実施の形態を添付の図面に基づいて説明する。
【0012】
図1〜図8は本発明の実施の形態を示すもので、図1は物体検知装置の制御系のブロック図、図2は物体検知装置の作用を説明するメインフローチャートの第1分図、図3は物体検知装置の作用を説明するメインフローチャートの第2分図、図4は前回ターゲット引継ぎ処理サブフローチャート、図5は外挿ターゲット引継ぎ処理サブフローチャート、図6は外挿ターゲット処理サブフローチャート、図7は前回ターゲット処理サブフローチャート、図8は今回ターゲット引継ぎ移動サブフローチャートである。
【0013】
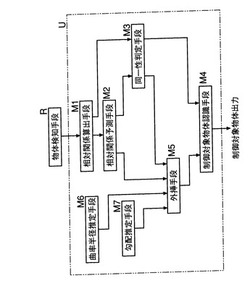
図1に示すように、本実施の形態の物体検知装置は、電磁波を送信する送信手段と、その電磁波が物体に反射された反射波を受信する受信手段とを備えたレーダー装置R(ミリ波レーダー装置あるいはレーザーレーダー装置)で検知した先行車に対して自車が追従走行する際に、自車と先行車との車間距離が所定値以下になって追突の可能性が高まると、自動制動により自車を制動する追突防止システムや、運転者に自発的な制動を促す警報システムを作動させるべく、その制御対象となる物体(先行車)のデータを追突防止システムや警報システムに出力する。
【0014】
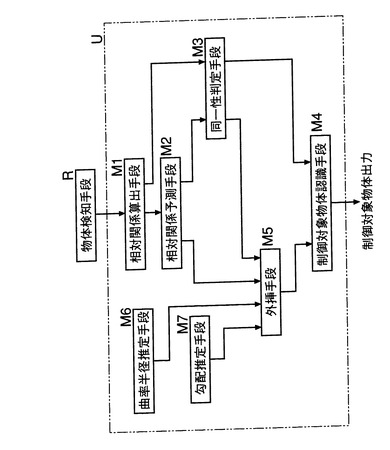
物体検知装置の電子制御ユニットUは、相対関係算出手段M1と、相対関係予測手段M2と、同一性判定手段M3と、制御対象物体認識手段M4と、外挿手段M5と、曲率半径推定手段M6と、勾配推定手段M7とを備える。
【0015】
レーダー装置Rは自車前方に電磁波を送信し、その電磁波が先行車のような物体に反射された反射波を受信することで、該物体を所定時間間隔(例えば、0.1秒)で検知する。相対関係算出手段M1は、前記反射波に基づいて物体の自車に対する相対関係、つまり相対位置および相対速を前記各時間間隔毎に検知する。相対関係予測手段M2は、前回検知した物体の相対位置および相対速から、今回検知時点での物体の相対位置および相対速を予測する。同一性判定手段M3は、相対関係算出手段M1が算出した物体の実際の相対関係と相対関係予測手段M2が予測した相対関係とを比較し、前回検知した物体と今回検知した物体との同一性を判定する。そして制御対象物体認識手段M4は、同一性判定手段M3により同一であると判定された回数が判定回数に達した物体を制御対象物体であると認識する。
【0016】
一方、外挿手段M5は、前回まで制御対象物体と認識されていた物体と同一であると判定される物体が検知されない場合に、相対関係予測手段M2により予測された物体を実際に検知されたものとして所定の外挿回数だけ外挿を行う。その際に、外挿手段M5は、外挿回数を同一性判定手段M3により同一であると判定された回数に比例して増加させるので、同一であると判定された回数が少ない場合には外挿回数が少なくなり、同一であると判定された回数が多い場合には外挿回数が多くなる。これにより、実際に物体をロストしたのに外挿が必要以上に継続されてロストした物体を対象とする不適切な車両制御が行われるのを防止することができ、また長い時間安定して検知されていた物体を一時的にロストした場合に、外挿を充分に長く継続して安定した車両制御を可能にすることができる。
【0017】
またカーブや坂道では物体を一時的にロストし易くなるが、曲率半径推定手段M6が自車走行路の曲率半径を推定すると外挿手段M5が前記曲率半径の減少に比例して外挿回数を増加させ、あるいは勾配推定手段M7が自車走行路の勾配を推定すると、外挿手段M5が前記勾配の増加に比例して外挿回数を増加させるので、カーブや坂道で物体をロストし難くして安定した車両制御を可能にすることができる。
【0018】
以下、図2〜図8のフローチャートに基づいて上記作用を更に説明する。
【0019】
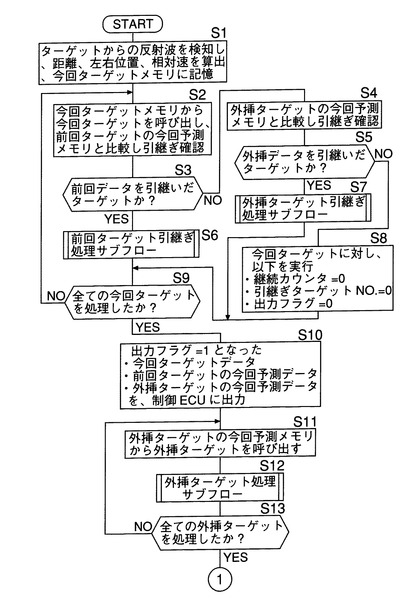
図2のフローチャートのステップS1でターゲットからの反射波を検知し、そのターゲットの距離、左右位置および相対速を算出して今回ターゲットメモリに記憶する。続くステップS2で今回ターゲットメモリから今回ターゲットを呼び出し、それを前回ターゲットの今回予測メモリと比較して引継ぎ(同一のターゲットであるか否か)を確認する。前回ターゲットと今回ターゲットとが同一ターゲットか否かの確認(引継ぎ確認)は、前回ターゲットを元に今回ターゲットの予測位置を求め、その予測位置を基準に設定した所定の引継ぎエリア内に今回ターゲットが入っていれば引継いだターゲットであると判定し、入っていなければ引継いだターゲットでないと判定する。
【0020】
その結果、ステップS3で引継いだターゲットであると判定されると、ステップS6で前回ターゲット引継ぎ処理サブフローを実行する。前記ステップS3で引継いだターゲットでないと判定されると、ステップS4で今度は前回ターゲットの今回予測メモリではなく、外挿ターゲットの今回予測メモリと比較して引継ぎを確認する。その結果、ステップS5で引継いだターゲットであると判定されると、ステップS7で外挿ターゲット引継ぎ処理サブフローを実行する。前記ステップS5で引継いだターゲットでないと判定されると、ステップS8で今回ターゲットは新規ターゲットであると判定し、継続カウンタ、引継ぎターゲットNo.および出力フラグを全て「0」にクリアする。そしてステップS9で全ての今回ターゲットを処理するまで、前記ステップS2にリターンする。
【0021】
次に、前記ステップS6の前回ターゲット引継ぎ処理サブフローの内容を、図4に基づいて説明する。
【0022】
先ずステップS31で今回ターゲットに対し、引継いだ前回ターゲットの継続カウンタを1インクリメントしたものを今回の継続カウンタとするとともに、引継いだ前回ターゲットNo.をそのまま今回の引継ぎターゲットNo.とする。続くステップS32で今回ターゲットの継続カウンタ≧2でなければステップS33で出力フラグを「0」にクリアし、今回ターゲットの継続カウンタ≧2であればステップS34で出力フラグを「1」にセットする。そしてステップS35で今回ターゲットに引継いだ前回ターゲットに対し、引継ぎフラグを「1」にセットして出力フラグを「0」にクリアする。
【0023】
前記ステップS32で今回ターゲットの継続カウンタ≧2となって今回ターゲットが出力されるのは、前々回にターゲットが新規に検知され、前回2度目に同じターゲットが継続して検知され、今回3度目に同じターゲットが継続して検知された場合である。つまり同じターゲットが継続して検知される場合には、そのターゲットが3回目の検知から制御対象として出力されることになる。
【0024】
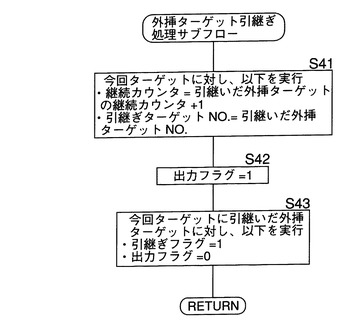
次に、前記ステップS7の外挿ターゲット引継ぎ処理サブフローの内容を、図5に基づいて説明する。
【0025】
先ずステップS41で今回ターゲットに対し、引継いだ外挿ターゲットの継続カウンタを1インクリメントしたものを今回の継続カウンタとするとともに、引継いだ外挿ターゲットNo.をそのまま今回の引継ぎターゲットNo.とする。続くステップS42で無条件で出力フラグを「1」にセットする。そしてステップS43で今回ターゲットに引継いだ外挿ターゲットに対し、引継ぎフラグを「1」にセットして出力フラグを「0」にクリアする。
【0026】
今回ターゲットが前回ターゲットを引き継いだ場合には、そのターゲットが3回目の検知から制御対象として出力されたが(図4のフローチャートのステップS32、S34参照)、今回ターゲットが外挿ターゲットを引き継いだ場合には、その時点で即座に制御対象として出力されるため(図5のフローチャート参照)、ターゲットの出力が途切れる時間を短縮することが可能となる。
【0027】
以上のようにして今回ターゲットの引継ぎが終了すると、図2のフローチャートに戻り、ステップS10で出力フラグ=「1」となった
・今回ターゲットのデータ
・前回ターゲットの今回予測データ(前回検知されたが今回検知できなかったデータ)
・外挿ターゲットの今回予測データ(複数回外挿されたデータ)
を制御ECUに出力する。
【0028】
以上で今回のデータ処理が終り、以下は次回のデータ処理のためのメモリデータ処理になる。
【0029】
図2のフローチャートのステップS11で外挿ターゲットの今回予測メモリから外挿ターゲットを呼び出し、続くステップS12で外挿ターゲット処理サブフローを実行し、ステップS13で全ての外挿ターゲットを処理するまで前記ステップS11、S12を繰り返す。
【0030】
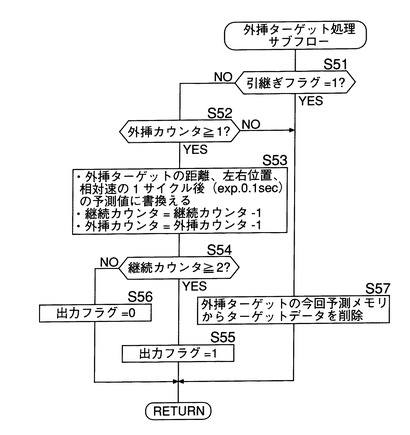
次に、前記ステップS12の外挿ターゲット処理サブフローの内容を、図6に基づいて説明する。
【0031】
先ずステップS51で引継ぎフラグ=「1」の場合、今回データに引き継いだ外挿データは実データとなるため、ステップS57で外挿ターゲットの今回予測メモリからターゲットデータを削除する。前記ステップS51で引継ぎフラグ=「0」であり、ステップS52で外挿カウンタ≧1でない場合、つまり所定回数(実施の形態では10回)連続して外挿処理したが実データにならなかった場合に、前記ステップS57で外挿ターゲットの今回予測メモリからターゲットデータを削除する。
【0032】
前記ステップS52で外挿カウンタ≧1の場合、ステップS53で残った外挿データを次回フレームのために1サイクル後の予測値に書き換え、最小値が0の継続カウンタおよび外挿カウンタをそれぞれ1デクリメントする。
【0033】
そしてステップS54で継続カウンタが≧2であればステップS55で出力フラグ=「1」とし、次回実データと引継がなくても出力対象とする。一方、前記ステップS54で継続カウンタが≧2でなければステップS56で出力フラグ=「0」として出力対象から除外する。
【0034】
このように、継続カウンタで次回実データと引継がなくても出力対象とするか否かを判断し、また外挿カウンタで次回も外挿を続けるか否かを判断することで、外挿データとしての出力回数を最小限に抑えながら外挿を継続し、実ターゲットとの引継ぎが確認できたら即座に実ターゲットを出力することができる。
【0035】
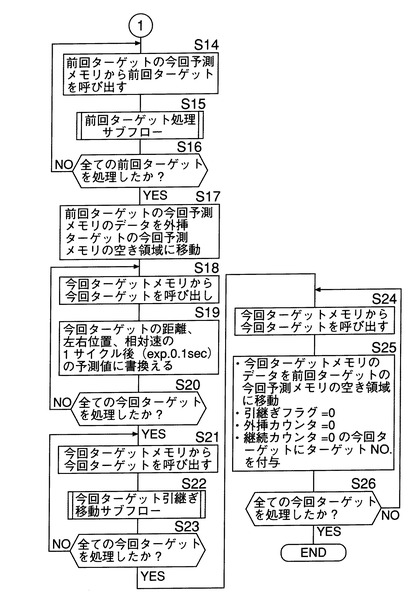
図3のフローチャートのステップS14で前回ターゲットの今回予測メモリから前回ターゲットを呼び出し、ステップS15で前回ターゲットの次回フレームのための処理を行い、ステップS16で全ての前回ターゲットを処理するまで前記ステップS14、S15を繰り返す。
【0036】
次に、前記ステップS15の前回ターゲット処理サブフローの内容を、図7に基づいて説明する。
【0037】
先ずステップS61で引継ぎフラグ=「1」の場合、今回データに引き継いだ前回データは実データとなるため、ステップS70で前回ターゲットの今回予測メモリからターゲットデータを削除する。前記ステップS61で引継ぎフラグ=「0」であり、ステップS62で継続カウンタ≧1でない場合、つまり継続カウンタ=0の場合には前記ステップS70に移行する。
【0038】
前記ステップS62で継続カウンタ≧1の場合、ステップS63で残った前回データを次回フレームのために1サイクル後の予測値に書き換え、外挿カウンタを最大値の「10」にセットする。この「10」が、外挿データが実データとして引継がれなくても外挿を続ける回数となる。
【0039】
続くステップS64で前記ターゲットの継続カウンタ≧6であれば、ステップS65で継続カウンタ=5に変更し、前記ステップS64で前記ターゲットの継続カウンタ≧6でなければ、ステップS66で継続カウンタを1デクリメントする。続くステップS67で継続カウンタ≧2であれば、ステップS68で出力フラグを「1」にセットし、前記ステップS67で継続カウンタ≧2でなければ、ステップS69で出力フラグを「0」にクリアする。よって、継続カウンタが2以上の前回ターゲットのみ、次回に実データに引継がなくても出力対象になる。
【0040】
このように、6回以上実データとして継続検知されたターゲットは最大回数(実施の形態では4回)外挿データとして出力するが、実データとして継続検知された回数が5回以下のターゲットの出力回数は継続回数に応じた出力回数となる。つまり、実データとして継続検知された回数が少ないターゲットはデータの信頼度が低いため、外挿データとして出力する回数も少なくなる。
【0041】
図3のフローチャートに戻り、前記ステップS14〜S16で次フレームのための前回ターゲットの外挿データの算出が終わったので、ステップS17で前回ターゲットの今回予測メモリのデータを外挿ターゲットの今回予測メモリの空き領域に移動させる。
【0042】
続くステップS18で今回ターゲットメモリから今回ターゲットを呼び出し、ステップS19で今回ターゲットの距離、左右位置、相対速の1サイクル後の予測値に書き換え、ステップS20で全ての今回ターゲットを処理するまで前記ステップS18、S19を繰り返す。
【0043】
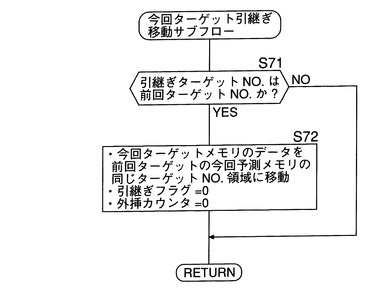
続くステップS21〜S23で今回ターゲットメモリから前回ターゲットの今回予測メモリへの引継ぎ移動を行う。即ち、ステップS21で今回ターゲットメモリから今回ターゲットを呼び出し、ステップS22のサブフローである図8のステップS71で引継ぎターゲットNo.が前回ターゲットNo.であれば、ステップS72で今回ターゲットメモリのデータを前回ターゲットの今回予測メモリの同じターゲットNo.の領域に移動し、引継ぎフラグを「0」にクリアし、外挿カウンタを「0」にクリアする。そしてステップS23で全ての今回ターゲットを処理するまで。前記ステップS21、S22を繰り返す。
【0044】
続くステップS24〜S26で今回ターゲットメモリから前回ターゲットの今回予測メモリへの移動を行う。即ち、ステップS24で今回ターゲットメモリから今回ターゲットを呼び出し、ステップS25で今回ターゲットメモリのデータを前回ターゲットの今回予測メモリの空き領域に移動し、引継ぎフラグを「0」にクリアし、外挿カウンタを「0」にクリアし、継続カウンタ=0の新規ターゲットに新しくターゲットNo.を付与する。そしてステップS26で全ての今回ターゲットを処理するまで、前記ステップS24、S25を繰り返す。
【0045】
【表1】

【0046】
表1は、ターゲットをロストするまでの継続検知時間が長い場合の作用を説明するもので、上段の本実施の形態では、ターゲットが8サイクル連続して検知された後に7サイクル連続して非検知になり、再び検知状態に復帰した場合を示している。ターゲットが検知されたとき外挿カウンタは「0」であり、ターゲットが連続して検知される毎に「7」まで増加する。2回目の検知までは「判定期間」であって出力フラグは「0」のままであるが、3回目の検知で継続カウンタが「2」になると出力フラグが「1」になって「検知中」になる。
【0047】
ターゲットをロストして検知状態が非検知になると、外挿カウンタが「10」にセットされて「外挿中」になり、非検知の度に「10」から一つずつ減少する。また最後の検知における継続カウンタは「6」よりも大きい「7」であるため、最初の非検知において「5」にセットされ、それ以後の非検知の度に「5」から一つずつ減少する(図7のステップS64、S65参照)。そして5回目の非検知で継続カウンタが「1」(「2」未満)になると、出力フラグが「0」になって「ロスト中」になる(図7のステップS67、S69参照)。そしてターゲットが再び検知されると、「判定期間」を挟むことなく、そのサイクルから即座に出力フラグが「1」に切り換わって「検知中」になる。
【0048】
一方、表1の下段は参考例に対応するもので、7サイクル連続した非検知の後に検知が連続しても、2サイクルの「判定期間」を挟まないと「検知中」にならず、「ロスト中」の期間が2サイクル分だけ長くなってしまう。
【0049】
【表2】
【0050】
表1は、ターゲットをロストするまでの継続検知時間が短い場合の作用を説明するもので、上段の本実施の形態では、ターゲットが5サイクル(表1では8サイクル)連続して検知された後に7サイクル連続して非検知になり、再び検知状態に復帰した場合を示している。ターゲットが検知されたとき外挿カウンタは「0」であり、ターゲットが連続して検知される毎に「4」まで増加する。2回目の検知までは「判定期間」であって出力フラグは「0」のままであるが、3回目の検知で継続カウンタが「2」になると出力フラグが「1」になって「検知中」になる。
【0051】
ターゲットをロストして検知状態が非検知になると、外挿カウンタが「10」にセットされて「外挿中」になり、非検知の度に「10」から一つずつ減少する。また最後の検知における継続カウンタは「6」よりも小さい「4」であるため、それ以後の非検知の度に「4」から一つずつ減少する(図7のステップS64、S66参照)。そして3回目の非検知で継続カウンタが「1」(「2」未満)になると、出力フラグが「0」になって「ロスト中」になる(図7のステップS67、S69参照)。そしてターゲットが再び検知されると、「判定期間」を挟むことなく、そのサイクルから即座に出力フラグが「1」に切り換わって「検知中」になる。
【0052】
このように、検知が8回も連続した表1の例では、それ以後に非検知が続いたときに「外挿中」が4サイクルも継続するのに対し、検知が4回しか連続しない表2の例では、それ以後に非検知が続いたときに「外挿中」が2サイクルしか継続しない。よって、検知回数が短い不確定なターゲットに対して不必要に多くの外挿が行われるのを防止することが可能となる。
【0053】
以上、本発明の実施の形態を説明したが、本発明はその要旨を逸脱しない範囲で種々の設計変更を行うことが可能である。
【0054】
例えば、実施の形態における外挿カウンタの初期値は「10」であるが、それは適宜変更可能である。
【0055】
また実施の形態では外挿回数の最大値は4回であるが、それは適宜変更可能である。
【図面の簡単な説明】
【0056】
【図1】物体検知装置の制御系のブロック図
【図2】物体検知装置の作用を説明するメインフローチャートの第1分図
【図3】物体検知装置の作用を説明するメインフローチャートの第2分図
【図4】前回ターゲット引継ぎ処理サブフローチャート
【図5】外挿ターゲット引継ぎ処理サブフローチャート
【図6】外挿ターゲット処理サブフローチャート
【図7】前回ターゲット処理サブフローチャート
【図8】今回ターゲット引継ぎ移動サブフローチャート
【符号の説明】
【0057】
R レーダー装置(物体検知手段)
M1 相対関係算出手段
M2 相対関係予測手段
M3 同一性判定手段
M4 制御対象物体認識手段
M5 外挿手段
M6 曲率半径推定手段
M7 勾配推定手段
【技術分野】
【0001】
本発明は、物体検知手段で物体を検知できなくなったときに該物体のデータを予測して補完する外挿処理を行う物体検知装置に関する。
【背景技術】
【0002】
レーダー装置により一定時間間隔で検知された物体が自車を制御するための認識物体であるか否かを判定するものにおいて、認識物体が一時的に非検知状態(ロスト状態)になると消失物体として登録し、その後に再検知された物体が消失物体と履歴接続のある物体であれば再検知された物体を直ちに認識物体として登録して消失物体の登録を削除し、また消失物体と履歴接続のある物体が検知されない場合には、消失物体が登録されてから所定の消失猶予(外挿)サイクルの間だけ消失物体の登録を維持するものが、下記特許文献1により公知である。
【特許文献1】特開2004−226120号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、上記特許文献1に記載されたものは、消失物体が登録されている消失猶予サイクルの期間が一定に設定されているため、長期間に亘って安定して検知されてきた認識物体がロストした場合に適した充分に長い消失猶予サイクルを設定すると、短期間しか検知されていない不安定な認識物体がロストした場合に過大な消失猶予サイクルが設定されてしまい、信頼度の低い消失物体を制御対象とする不適切な制御が継続されてしまう可能性があった。
【0004】
本発明は前述の事情に鑑みてなされたもので、物体を検知できなくなったときに該物体のデータを予測して補完する外挿処理の許可回数を適切に設定することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、請求項1に記載された発明によれば、自車の進行方向の所定の検知領域に存在する物体を所定時間毎に検知する物体検知手段と、前記物体検知手段の検知結果に基づいて自車と物体との相対位置および相対速よりなる相対関係を算出する相対関係算出手段と、前回の検知時において相対関係算出手段により算出された相対関係から今回の検知時における相対関係を予測する相対関係予測手段と、前記相対関係予測手段により予測された今回の検知時における相対関係を前記相対関係算出手段により算出された今回の検知時における相対関係と比較することで、前回検知した物体および今回検知した物体の同一性を判定する同一性判定手段と、前記同一性判定手段により同一であると判定された回数が判定回数に達した物体を制御対象物体であると認識する制御対象物体認識手段と、前回まで制御対象物体と認識されていた物体と同一であると判定される物体が検知されない場合に、前記相対関係予測手段により予測された物体を実際に検知されたものとして所定の外挿回数だけ外挿を行う外挿手段とを備えた物体検知装置において、前記外挿手段は、前記同一性判定手段により同一であると判定された回数に比例して前記外挿回数を増加させることを特徴とする物体検知装置が提案される。
【0006】
また請求項2に記載された発明によれば、請求項1の構成に加えて、自車走行路の曲率半径を推定する曲率半径推定手段を備え、前記外挿手段は前記曲率半径推定手段により推定された曲率半径の減少に比例して前記外挿回数を増加させることを特徴とする物体検知装置が提案される。
【0007】
また請求項3に記載された発明によれば、請求項1または請求項2の構成に加えて、自車走行路の勾配を推定する勾配推定手段を備え、前記外挿手段は前記勾配推定手段により推定された勾配の増加に比例して前記外挿回数を増加させることを特徴とする物体検知装置が提案される。
【発明の効果】
【0008】
請求項1の構成によれば、物体検知手段は自車の進行方向の所定の検知領域に存在する物体を所定時間毎に検知し、相対関係算出手段は物体検知手段の検知結果に基づいて自車と物体との相対位置および相対速よりなる相対関係を算出し、相対関係予測手段は相対関係算出手段により算出された物体の前回の検知時における相対関係に基づいて今回の検知時における相対関係を予測する。同一性判定手段は今回の検知時における予測された相対関係と算出された相対関係と比較することで、前回検知した物体および今回検知した物体の同一性を判定し、制御対象物体認識手段は同一性判定手段により同一であると判定された回数が判定回数に達した物体を制御対象物体であると認識する。その際に、外挿手段は、前回まで制御対象物体と認識されていた物体と同一であると判定される物体が検知されない場合に、相対関係予測手段により予測された物体を実際に検知されたものとして所定の外挿回数だけ外挿を行うとともに、同一性判定手段により同一であると判定された回数に比例して前記外挿回数を増加させるので、実際に物体をロストした場合に外挿が必要以上に継続されてロストした物体を対象とする不適切な制御が行われるのを防止することができる。
【0009】
また請求項2の構成によれば、曲率半径推定手段が自車走行路の曲率半径を推定すると、外挿手段が前記曲率半径の減少に比例して外挿回数を増加させるので、物体をロストし易いカーブで外挿回数を増やして物体をロストし難くすることができる。
【0010】
また請求項3の構成によれば、勾配推定手段が自車走行路の勾配を推定すると、外挿手段が前記勾配の増加に比例して外挿回数を増加させるので、物体をロストし易い坂道で外挿回数を増やして物体をロストし難くすることができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明の実施の形態を添付の図面に基づいて説明する。
【0012】
図1〜図8は本発明の実施の形態を示すもので、図1は物体検知装置の制御系のブロック図、図2は物体検知装置の作用を説明するメインフローチャートの第1分図、図3は物体検知装置の作用を説明するメインフローチャートの第2分図、図4は前回ターゲット引継ぎ処理サブフローチャート、図5は外挿ターゲット引継ぎ処理サブフローチャート、図6は外挿ターゲット処理サブフローチャート、図7は前回ターゲット処理サブフローチャート、図8は今回ターゲット引継ぎ移動サブフローチャートである。
【0013】
図1に示すように、本実施の形態の物体検知装置は、電磁波を送信する送信手段と、その電磁波が物体に反射された反射波を受信する受信手段とを備えたレーダー装置R(ミリ波レーダー装置あるいはレーザーレーダー装置)で検知した先行車に対して自車が追従走行する際に、自車と先行車との車間距離が所定値以下になって追突の可能性が高まると、自動制動により自車を制動する追突防止システムや、運転者に自発的な制動を促す警報システムを作動させるべく、その制御対象となる物体(先行車)のデータを追突防止システムや警報システムに出力する。
【0014】
物体検知装置の電子制御ユニットUは、相対関係算出手段M1と、相対関係予測手段M2と、同一性判定手段M3と、制御対象物体認識手段M4と、外挿手段M5と、曲率半径推定手段M6と、勾配推定手段M7とを備える。
【0015】
レーダー装置Rは自車前方に電磁波を送信し、その電磁波が先行車のような物体に反射された反射波を受信することで、該物体を所定時間間隔(例えば、0.1秒)で検知する。相対関係算出手段M1は、前記反射波に基づいて物体の自車に対する相対関係、つまり相対位置および相対速を前記各時間間隔毎に検知する。相対関係予測手段M2は、前回検知した物体の相対位置および相対速から、今回検知時点での物体の相対位置および相対速を予測する。同一性判定手段M3は、相対関係算出手段M1が算出した物体の実際の相対関係と相対関係予測手段M2が予測した相対関係とを比較し、前回検知した物体と今回検知した物体との同一性を判定する。そして制御対象物体認識手段M4は、同一性判定手段M3により同一であると判定された回数が判定回数に達した物体を制御対象物体であると認識する。
【0016】
一方、外挿手段M5は、前回まで制御対象物体と認識されていた物体と同一であると判定される物体が検知されない場合に、相対関係予測手段M2により予測された物体を実際に検知されたものとして所定の外挿回数だけ外挿を行う。その際に、外挿手段M5は、外挿回数を同一性判定手段M3により同一であると判定された回数に比例して増加させるので、同一であると判定された回数が少ない場合には外挿回数が少なくなり、同一であると判定された回数が多い場合には外挿回数が多くなる。これにより、実際に物体をロストしたのに外挿が必要以上に継続されてロストした物体を対象とする不適切な車両制御が行われるのを防止することができ、また長い時間安定して検知されていた物体を一時的にロストした場合に、外挿を充分に長く継続して安定した車両制御を可能にすることができる。
【0017】
またカーブや坂道では物体を一時的にロストし易くなるが、曲率半径推定手段M6が自車走行路の曲率半径を推定すると外挿手段M5が前記曲率半径の減少に比例して外挿回数を増加させ、あるいは勾配推定手段M7が自車走行路の勾配を推定すると、外挿手段M5が前記勾配の増加に比例して外挿回数を増加させるので、カーブや坂道で物体をロストし難くして安定した車両制御を可能にすることができる。
【0018】
以下、図2〜図8のフローチャートに基づいて上記作用を更に説明する。
【0019】
図2のフローチャートのステップS1でターゲットからの反射波を検知し、そのターゲットの距離、左右位置および相対速を算出して今回ターゲットメモリに記憶する。続くステップS2で今回ターゲットメモリから今回ターゲットを呼び出し、それを前回ターゲットの今回予測メモリと比較して引継ぎ(同一のターゲットであるか否か)を確認する。前回ターゲットと今回ターゲットとが同一ターゲットか否かの確認(引継ぎ確認)は、前回ターゲットを元に今回ターゲットの予測位置を求め、その予測位置を基準に設定した所定の引継ぎエリア内に今回ターゲットが入っていれば引継いだターゲットであると判定し、入っていなければ引継いだターゲットでないと判定する。
【0020】
その結果、ステップS3で引継いだターゲットであると判定されると、ステップS6で前回ターゲット引継ぎ処理サブフローを実行する。前記ステップS3で引継いだターゲットでないと判定されると、ステップS4で今度は前回ターゲットの今回予測メモリではなく、外挿ターゲットの今回予測メモリと比較して引継ぎを確認する。その結果、ステップS5で引継いだターゲットであると判定されると、ステップS7で外挿ターゲット引継ぎ処理サブフローを実行する。前記ステップS5で引継いだターゲットでないと判定されると、ステップS8で今回ターゲットは新規ターゲットであると判定し、継続カウンタ、引継ぎターゲットNo.および出力フラグを全て「0」にクリアする。そしてステップS9で全ての今回ターゲットを処理するまで、前記ステップS2にリターンする。
【0021】
次に、前記ステップS6の前回ターゲット引継ぎ処理サブフローの内容を、図4に基づいて説明する。
【0022】
先ずステップS31で今回ターゲットに対し、引継いだ前回ターゲットの継続カウンタを1インクリメントしたものを今回の継続カウンタとするとともに、引継いだ前回ターゲットNo.をそのまま今回の引継ぎターゲットNo.とする。続くステップS32で今回ターゲットの継続カウンタ≧2でなければステップS33で出力フラグを「0」にクリアし、今回ターゲットの継続カウンタ≧2であればステップS34で出力フラグを「1」にセットする。そしてステップS35で今回ターゲットに引継いだ前回ターゲットに対し、引継ぎフラグを「1」にセットして出力フラグを「0」にクリアする。
【0023】
前記ステップS32で今回ターゲットの継続カウンタ≧2となって今回ターゲットが出力されるのは、前々回にターゲットが新規に検知され、前回2度目に同じターゲットが継続して検知され、今回3度目に同じターゲットが継続して検知された場合である。つまり同じターゲットが継続して検知される場合には、そのターゲットが3回目の検知から制御対象として出力されることになる。
【0024】
次に、前記ステップS7の外挿ターゲット引継ぎ処理サブフローの内容を、図5に基づいて説明する。
【0025】
先ずステップS41で今回ターゲットに対し、引継いだ外挿ターゲットの継続カウンタを1インクリメントしたものを今回の継続カウンタとするとともに、引継いだ外挿ターゲットNo.をそのまま今回の引継ぎターゲットNo.とする。続くステップS42で無条件で出力フラグを「1」にセットする。そしてステップS43で今回ターゲットに引継いだ外挿ターゲットに対し、引継ぎフラグを「1」にセットして出力フラグを「0」にクリアする。
【0026】
今回ターゲットが前回ターゲットを引き継いだ場合には、そのターゲットが3回目の検知から制御対象として出力されたが(図4のフローチャートのステップS32、S34参照)、今回ターゲットが外挿ターゲットを引き継いだ場合には、その時点で即座に制御対象として出力されるため(図5のフローチャート参照)、ターゲットの出力が途切れる時間を短縮することが可能となる。
【0027】
以上のようにして今回ターゲットの引継ぎが終了すると、図2のフローチャートに戻り、ステップS10で出力フラグ=「1」となった
・今回ターゲットのデータ
・前回ターゲットの今回予測データ(前回検知されたが今回検知できなかったデータ)
・外挿ターゲットの今回予測データ(複数回外挿されたデータ)
を制御ECUに出力する。
【0028】
以上で今回のデータ処理が終り、以下は次回のデータ処理のためのメモリデータ処理になる。
【0029】
図2のフローチャートのステップS11で外挿ターゲットの今回予測メモリから外挿ターゲットを呼び出し、続くステップS12で外挿ターゲット処理サブフローを実行し、ステップS13で全ての外挿ターゲットを処理するまで前記ステップS11、S12を繰り返す。
【0030】
次に、前記ステップS12の外挿ターゲット処理サブフローの内容を、図6に基づいて説明する。
【0031】
先ずステップS51で引継ぎフラグ=「1」の場合、今回データに引き継いだ外挿データは実データとなるため、ステップS57で外挿ターゲットの今回予測メモリからターゲットデータを削除する。前記ステップS51で引継ぎフラグ=「0」であり、ステップS52で外挿カウンタ≧1でない場合、つまり所定回数(実施の形態では10回)連続して外挿処理したが実データにならなかった場合に、前記ステップS57で外挿ターゲットの今回予測メモリからターゲットデータを削除する。
【0032】
前記ステップS52で外挿カウンタ≧1の場合、ステップS53で残った外挿データを次回フレームのために1サイクル後の予測値に書き換え、最小値が0の継続カウンタおよび外挿カウンタをそれぞれ1デクリメントする。
【0033】
そしてステップS54で継続カウンタが≧2であればステップS55で出力フラグ=「1」とし、次回実データと引継がなくても出力対象とする。一方、前記ステップS54で継続カウンタが≧2でなければステップS56で出力フラグ=「0」として出力対象から除外する。
【0034】
このように、継続カウンタで次回実データと引継がなくても出力対象とするか否かを判断し、また外挿カウンタで次回も外挿を続けるか否かを判断することで、外挿データとしての出力回数を最小限に抑えながら外挿を継続し、実ターゲットとの引継ぎが確認できたら即座に実ターゲットを出力することができる。
【0035】
図3のフローチャートのステップS14で前回ターゲットの今回予測メモリから前回ターゲットを呼び出し、ステップS15で前回ターゲットの次回フレームのための処理を行い、ステップS16で全ての前回ターゲットを処理するまで前記ステップS14、S15を繰り返す。
【0036】
次に、前記ステップS15の前回ターゲット処理サブフローの内容を、図7に基づいて説明する。
【0037】
先ずステップS61で引継ぎフラグ=「1」の場合、今回データに引き継いだ前回データは実データとなるため、ステップS70で前回ターゲットの今回予測メモリからターゲットデータを削除する。前記ステップS61で引継ぎフラグ=「0」であり、ステップS62で継続カウンタ≧1でない場合、つまり継続カウンタ=0の場合には前記ステップS70に移行する。
【0038】
前記ステップS62で継続カウンタ≧1の場合、ステップS63で残った前回データを次回フレームのために1サイクル後の予測値に書き換え、外挿カウンタを最大値の「10」にセットする。この「10」が、外挿データが実データとして引継がれなくても外挿を続ける回数となる。
【0039】
続くステップS64で前記ターゲットの継続カウンタ≧6であれば、ステップS65で継続カウンタ=5に変更し、前記ステップS64で前記ターゲットの継続カウンタ≧6でなければ、ステップS66で継続カウンタを1デクリメントする。続くステップS67で継続カウンタ≧2であれば、ステップS68で出力フラグを「1」にセットし、前記ステップS67で継続カウンタ≧2でなければ、ステップS69で出力フラグを「0」にクリアする。よって、継続カウンタが2以上の前回ターゲットのみ、次回に実データに引継がなくても出力対象になる。
【0040】
このように、6回以上実データとして継続検知されたターゲットは最大回数(実施の形態では4回)外挿データとして出力するが、実データとして継続検知された回数が5回以下のターゲットの出力回数は継続回数に応じた出力回数となる。つまり、実データとして継続検知された回数が少ないターゲットはデータの信頼度が低いため、外挿データとして出力する回数も少なくなる。
【0041】
図3のフローチャートに戻り、前記ステップS14〜S16で次フレームのための前回ターゲットの外挿データの算出が終わったので、ステップS17で前回ターゲットの今回予測メモリのデータを外挿ターゲットの今回予測メモリの空き領域に移動させる。
【0042】
続くステップS18で今回ターゲットメモリから今回ターゲットを呼び出し、ステップS19で今回ターゲットの距離、左右位置、相対速の1サイクル後の予測値に書き換え、ステップS20で全ての今回ターゲットを処理するまで前記ステップS18、S19を繰り返す。
【0043】
続くステップS21〜S23で今回ターゲットメモリから前回ターゲットの今回予測メモリへの引継ぎ移動を行う。即ち、ステップS21で今回ターゲットメモリから今回ターゲットを呼び出し、ステップS22のサブフローである図8のステップS71で引継ぎターゲットNo.が前回ターゲットNo.であれば、ステップS72で今回ターゲットメモリのデータを前回ターゲットの今回予測メモリの同じターゲットNo.の領域に移動し、引継ぎフラグを「0」にクリアし、外挿カウンタを「0」にクリアする。そしてステップS23で全ての今回ターゲットを処理するまで。前記ステップS21、S22を繰り返す。
【0044】
続くステップS24〜S26で今回ターゲットメモリから前回ターゲットの今回予測メモリへの移動を行う。即ち、ステップS24で今回ターゲットメモリから今回ターゲットを呼び出し、ステップS25で今回ターゲットメモリのデータを前回ターゲットの今回予測メモリの空き領域に移動し、引継ぎフラグを「0」にクリアし、外挿カウンタを「0」にクリアし、継続カウンタ=0の新規ターゲットに新しくターゲットNo.を付与する。そしてステップS26で全ての今回ターゲットを処理するまで、前記ステップS24、S25を繰り返す。
【0045】
【表1】
【0046】
表1は、ターゲットをロストするまでの継続検知時間が長い場合の作用を説明するもので、上段の本実施の形態では、ターゲットが8サイクル連続して検知された後に7サイクル連続して非検知になり、再び検知状態に復帰した場合を示している。ターゲットが検知されたとき外挿カウンタは「0」であり、ターゲットが連続して検知される毎に「7」まで増加する。2回目の検知までは「判定期間」であって出力フラグは「0」のままであるが、3回目の検知で継続カウンタが「2」になると出力フラグが「1」になって「検知中」になる。
【0047】
ターゲットをロストして検知状態が非検知になると、外挿カウンタが「10」にセットされて「外挿中」になり、非検知の度に「10」から一つずつ減少する。また最後の検知における継続カウンタは「6」よりも大きい「7」であるため、最初の非検知において「5」にセットされ、それ以後の非検知の度に「5」から一つずつ減少する(図7のステップS64、S65参照)。そして5回目の非検知で継続カウンタが「1」(「2」未満)になると、出力フラグが「0」になって「ロスト中」になる(図7のステップS67、S69参照)。そしてターゲットが再び検知されると、「判定期間」を挟むことなく、そのサイクルから即座に出力フラグが「1」に切り換わって「検知中」になる。
【0048】
一方、表1の下段は参考例に対応するもので、7サイクル連続した非検知の後に検知が連続しても、2サイクルの「判定期間」を挟まないと「検知中」にならず、「ロスト中」の期間が2サイクル分だけ長くなってしまう。
【0049】
【表2】
【0050】
表1は、ターゲットをロストするまでの継続検知時間が短い場合の作用を説明するもので、上段の本実施の形態では、ターゲットが5サイクル(表1では8サイクル)連続して検知された後に7サイクル連続して非検知になり、再び検知状態に復帰した場合を示している。ターゲットが検知されたとき外挿カウンタは「0」であり、ターゲットが連続して検知される毎に「4」まで増加する。2回目の検知までは「判定期間」であって出力フラグは「0」のままであるが、3回目の検知で継続カウンタが「2」になると出力フラグが「1」になって「検知中」になる。
【0051】
ターゲットをロストして検知状態が非検知になると、外挿カウンタが「10」にセットされて「外挿中」になり、非検知の度に「10」から一つずつ減少する。また最後の検知における継続カウンタは「6」よりも小さい「4」であるため、それ以後の非検知の度に「4」から一つずつ減少する(図7のステップS64、S66参照)。そして3回目の非検知で継続カウンタが「1」(「2」未満)になると、出力フラグが「0」になって「ロスト中」になる(図7のステップS67、S69参照)。そしてターゲットが再び検知されると、「判定期間」を挟むことなく、そのサイクルから即座に出力フラグが「1」に切り換わって「検知中」になる。
【0052】
このように、検知が8回も連続した表1の例では、それ以後に非検知が続いたときに「外挿中」が4サイクルも継続するのに対し、検知が4回しか連続しない表2の例では、それ以後に非検知が続いたときに「外挿中」が2サイクルしか継続しない。よって、検知回数が短い不確定なターゲットに対して不必要に多くの外挿が行われるのを防止することが可能となる。
【0053】
以上、本発明の実施の形態を説明したが、本発明はその要旨を逸脱しない範囲で種々の設計変更を行うことが可能である。
【0054】
例えば、実施の形態における外挿カウンタの初期値は「10」であるが、それは適宜変更可能である。
【0055】
また実施の形態では外挿回数の最大値は4回であるが、それは適宜変更可能である。
【図面の簡単な説明】
【0056】
【図1】物体検知装置の制御系のブロック図
【図2】物体検知装置の作用を説明するメインフローチャートの第1分図
【図3】物体検知装置の作用を説明するメインフローチャートの第2分図
【図4】前回ターゲット引継ぎ処理サブフローチャート
【図5】外挿ターゲット引継ぎ処理サブフローチャート
【図6】外挿ターゲット処理サブフローチャート
【図7】前回ターゲット処理サブフローチャート
【図8】今回ターゲット引継ぎ移動サブフローチャート
【符号の説明】
【0057】
R レーダー装置(物体検知手段)
M1 相対関係算出手段
M2 相対関係予測手段
M3 同一性判定手段
M4 制御対象物体認識手段
M5 外挿手段
M6 曲率半径推定手段
M7 勾配推定手段
【特許請求の範囲】
【請求項1】
自車の進行方向の所定の検知領域に存在する物体を所定時間毎に検知する物体検知手段(R)と、
前記物体検知手段(R)の検知結果に基づいて自車と物体との相対位置および相対速よりなる相対関係を算出する相対関係算出手段(M1)と、
前回の検知時において相対関係算出手段(M1)により算出された相対関係から今回の検知時における相対関係を予測する相対関係予測手段(M2)と、
前記相対関係予測手段(M2)により予測された今回の検知時における相対関係を前記相対関係算出手段(M1)により算出された今回の検知時における相対関係と比較することで、前回検知した物体および今回検知した物体の同一性を判定する同一性判定手段(M3)と、
前記同一性判定手段(M3)により同一であると判定された回数が判定回数に達した物体を制御対象物体であると認識する制御対象物体認識手段(M4)と、
前回まで制御対象物体と認識されていた物体と同一であると判定される物体が検知されない場合に、前記相対関係予測手段(M2)により予測された物体を実際に検知されたものとして所定の外挿回数だけ外挿を行う外挿手段(M5)と、
を備えた物体検知装置において、
前記外挿手段(M5)は、前記同一性判定手段(M3)により同一であると判定された回数に比例して前記外挿回数を増加させることを特徴とする物体検知装置。
【請求項2】
自車走行路の曲率半径を推定する曲率半径推定手段(M6)を備え、前記外挿手段(M5)は前記曲率半径推定手段(M6)により推定された曲率半径の減少に比例して前記外挿回数を増加させることを特徴とする、請求項1に記載の物体検知装置。
【請求項3】
自車走行路の勾配を推定する勾配推定手段(M7)を備え、前記外挿手段(M5)は前記勾配推定手段(M7)により推定された勾配の増加に比例して前記外挿回数を増加させることを特徴とする、請求項1または請求項2に記載の物体検知装置。
【請求項1】
自車の進行方向の所定の検知領域に存在する物体を所定時間毎に検知する物体検知手段(R)と、
前記物体検知手段(R)の検知結果に基づいて自車と物体との相対位置および相対速よりなる相対関係を算出する相対関係算出手段(M1)と、
前回の検知時において相対関係算出手段(M1)により算出された相対関係から今回の検知時における相対関係を予測する相対関係予測手段(M2)と、
前記相対関係予測手段(M2)により予測された今回の検知時における相対関係を前記相対関係算出手段(M1)により算出された今回の検知時における相対関係と比較することで、前回検知した物体および今回検知した物体の同一性を判定する同一性判定手段(M3)と、
前記同一性判定手段(M3)により同一であると判定された回数が判定回数に達した物体を制御対象物体であると認識する制御対象物体認識手段(M4)と、
前回まで制御対象物体と認識されていた物体と同一であると判定される物体が検知されない場合に、前記相対関係予測手段(M2)により予測された物体を実際に検知されたものとして所定の外挿回数だけ外挿を行う外挿手段(M5)と、
を備えた物体検知装置において、
前記外挿手段(M5)は、前記同一性判定手段(M3)により同一であると判定された回数に比例して前記外挿回数を増加させることを特徴とする物体検知装置。
【請求項2】
自車走行路の曲率半径を推定する曲率半径推定手段(M6)を備え、前記外挿手段(M5)は前記曲率半径推定手段(M6)により推定された曲率半径の減少に比例して前記外挿回数を増加させることを特徴とする、請求項1に記載の物体検知装置。
【請求項3】
自車走行路の勾配を推定する勾配推定手段(M7)を備え、前記外挿手段(M5)は前記勾配推定手段(M7)により推定された勾配の増加に比例して前記外挿回数を増加させることを特徴とする、請求項1または請求項2に記載の物体検知装置。
【図1】

【図2】
【図3】
【図4】

【図5】
【図6】
【図7】

【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2008−51614(P2008−51614A)
【公開日】平成20年3月6日(2008.3.6)
【国際特許分類】
【出願番号】特願2006−227320(P2006−227320)
【出願日】平成18年8月24日(2006.8.24)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成20年3月6日(2008.3.6)
【国際特許分類】
【出願日】平成18年8月24日(2006.8.24)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]