
物体検知装置
【課題】前方に位置する物体を検知する機能に加えて、降雨状態を検知する機能を有し、この機能にかかる降雨状態の検知精度を向上させた物体検知装置を提供する。
【解決手段】雨滴検知用PD41は、視野制限部材50により、反射光を受光する検知視野が第1の物体検知用PD42、および第2の物体検知用PD43の検知視野と異なる領域に制限されている。雨滴検知用PD41は、雨滴検知領域における、雨滴からの反射光を受光する。第1の物体検知用PD42、および第2の物体検知用PD43は、物体からの反射光を受光する。
【解決手段】雨滴検知用PD41は、視野制限部材50により、反射光を受光する検知視野が第1の物体検知用PD42、および第2の物体検知用PD43の検知視野と異なる領域に制限されている。雨滴検知用PD41は、雨滴検知領域における、雨滴からの反射光を受光する。第1の物体検知用PD42、および第2の物体検知用PD43は、物体からの反射光を受光する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、レーザ光等を探査波として前方に照射し、その反射波を検知することにより、前方に位置する物体を検知する物体検知装置に関する。
【背景技術】
【0002】
従来、車両に取り付け、レーザ光や電波等の探査波を自車両の前方に照射し、その反射波を検知することで、自車両の前方に位置する先行車両等の物体の検知、および検知した物体までの距離を測定するレーダ装置がある。このレーダ装置の測定結果は、先行車両との車間距離を一定に保つ定車間距離追従走行(ACC:Adaptive Cruise Control)や渋滞時(低速時)の追従走行(LSF:Low Speed Following)等の車両の走行制御に利用できる。また、このレーダ装置は、自車両前方に位置する、衝突が避けられない先行車両や停止物を検知した場合に、制動を掛けて衝突時の被害を軽減するプリクラッシュセーフティシステムにも利用できる。
【0003】
また、レーダ装置には、降雨状態を判断し、車両のワイパの自動制御にも利用できる雨滴検知機能を一体化した構成のものもある(特許文献1参照)。特許文献1は、前方に照射するレーザ光が透過する投受光面(ガラスまたは合成樹脂による透過窓部)において乱反射した光を受光する受光素子(汚れ検知用PD)と、投受光面を透過して前方に位置する物体で反射された反射光を受光する受光素子(測距用PD)と、を備えている。特許文献1は、所定期間(例えば、10分)毎に、その所定期間における、汚れ検知用PDの受光量の変化に基づき、投受光面における雨滴の付着状況、すなわち雨量、を検知する処理を繰り返し、降雨状態を検知している。また、特許文献1は、測距用PDでの反射光の受光により、前方に位置する物体の検知や、この物体までの距離等の測定を行う。
【0004】
しかしながら、レーダ装置は、汚れ検知用PDが前方に位置する物体等からの反射光の受光を十分に抑えなければ、降雨状態を精度よく検知できない。すなわち、レーダ装置における降雨状態の検知精度を向上させるには、汚れ検知用PDにおける前方に位置する物体等からの反射光の受光を低減しなければならない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平10−329653号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
この発明の目的は、前方に位置する物体の検知および降雨状態の検知の両機能を有する物体検知装置において、前方の物体からの反射光受光による影響を低減させて降雨状態の検知精度を向上させる点にある。
【課題を解決するための手段】
【0007】
この発明の物体検知装置は、上記課題を解決し、その目的を達するために、以下のように構成している。
【0008】
照射部が、前方に探査波を照射する。この探査波は、例えばレーザ光やミリ波である。
【0009】
検知部が、照射部が照射した探査波について、その反射波を検知する第1、および第2の検知素子を有する。
【0010】
判断部は、第1の検知素子で検知した反射波の強度に基づき、前方における降雨状態を判断する。また、判断部は、第2の検知素子で検知した反射波の強度に基づき、前方に位置する物体の有無を判断する。
【0011】
さらに、視野制限部材を、第1の検知素子の前方に配置している。この視野制限部材は、第1の検知素子が反射波を検知する視野を、第2検知素子が反射波を検知する視野と異ならせている。例えば、第1の検知素子は、数十cm周辺の範囲における雨滴からの反射波を検知し、第2の検知素子は、例えば、数m〜数十mの範囲に位置する物体からの反射波を検知するように、それぞれの検知視野を視野制限部材により制限している。このように、第1の検知素子と、第2の検知素子とで、検知する反射波を反射した物体が異なる。
【0012】
したがって、視野制限部材によって、第1の検知素子が雨滴からの反射波を精度よく検知し、第2の検知素子が前方に位置する物体からの反射波を検知するように、その検知視野を制限することで、前方に位置する物体の検知、および降雨状態の検知が精度よく行える。
【0013】
また、雨滴からの反射波は、物体からの反射波に比べて極めて小さいので、視野制限部材は、第1の検知素子の視野を、第2の検知素子の視野よりも照射部に近い位置で反射された反射波を検知する視野に制限するのが好ましい。
【0014】
また、視野制限部材は、例えば、第1の検知素子、および第2の検知素子毎に、その検知素子が検知する反射波を通過させる窓部を形成した部材で構成できる。
【発明の効果】
【0015】
この発明によれば、前方に位置する物体の検知、および降雨状態の検知が精度よく行える。
【図面の簡単な説明】
【0016】
【図1】レーダ装置の主要部の構成を示すブロック図である。
【図2】車両における、LDやPDの取り付け位置を説明する図である。
【図3】LDやPDの配置関係を説明する図である。
【図4】レーザ光の照射領域、および各受光素子の検知視野の関係を説明する図である。
【図5】前方車両との距離の違いによる、第1の物体検知用PDの受光面に結像される前方車両、および角受光領域の受光光量を示す概略図である。
【発明を実施するための形態】
【0017】
以下、この発明の実施形態であるレーダ装置について説明する。
【0018】
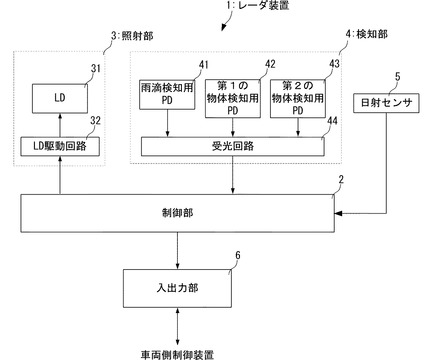
図1は、このレーダ装置の主要部の構成を示すブロック図である。レーダ装置1は、制御部2と、照射部3と、検知部4と、日射センサ5と、入出力部6と、を備えている。このレーダ装置1は、車両に搭載される。レーダ装置1は、搭載した車両(以下、自車両と言う。)の前方にレーザ光を探査波として照射し、その反射光を検知することにより、自車両の前方に位置する物体の検知を行う。また、このレーダ装置1は、自車両周辺の雨滴からの反射光を検知することにより、自車両周辺の降雨状態を検知する降雨状態検知機能も有している。
【0019】
制御部2は、レーダ装置1本体各部の動作を制御する。この制御部2が、請求項における判断部の機能を有する。
【0020】
照射部3は、レーザダイオード31(以下、LD31と言う。)と、LD駆動回路32とを有している。LD駆動回路32は、制御部2からの指示にしたがって、LD31を発光させ、パルス状のレーザ光を自車両の前方に照射する。
【0021】
検知部4は、雨滴検知用フォトダイオード41(以下、雨滴検知用PD41と言う。)と、第1の物体検知用フォトダイオード42(以下、第1の物体検知用PD42と言う。)と、第2の物体検知用フォトダイオード43(以下、第2の物体検知用PD43と言う。)と、受光回路44と、を有している。
【0022】
雨滴検知用PD41が、この発明で言う第1の検知素子に相当する。この雨滴検知用PD41は、受光量が比較的小さい領域において、その受光量に応じた信号を出力するAPD(アバランシェフォトダイオード)を使用するのが好ましい。
【0023】
第1の物体検知用PD42は、受光領域を水平方向にn分割(ここでは、10分割)した受光素子である。第2の物体検知用PD43は、受光領域を分割していない(受光領域が1つである。)受光素子である。この第1の物体検知用PD42、および第2の物体検知用PD43は、受光量が比較的大きい領域において、その受光量に応じた信号を出力するPIN型フォトダイオードを使用するのが好ましい。第1の物体検知用PD42は、自車両の前方、約7m〜20mに位置する前方車両の両側に取り付けられているリフレクタ(反射板)からの反射光を分割している領域で個別に受光するためのものである。第2の物体検知用PD43は、自車両の前方、約7m以内に位置する前方車両等の物体からの反射光を受光するためのものである。
【0024】
第1の物体検知用PD42、または第2の物体検知用PD43の一方が、この発明で言う第2の検知素子に相当する。
【0025】
受光回路44は、雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43毎に、その出力信号の積算や増幅等を行う。また、受光回路44は、第1の物体検知用PD42については、分割している受光領域毎に、その出力信号の積算や増幅等を行う。
【0026】
日射センサ5は、日射量を検知する。
【0027】
入出力部6は、検知した前方車両等の物体の位置(自車両との相対位置)等を示す物体検知情報、自車両周辺における降雨状態を示す降雨状態検知情報、自車両周辺における日射量を示す日射量検知情報等を、自車両の制御装置(不図示)に出力する。また、入出力部6は、自車両の制御装置から、自車両の走行速度等の車両状態情報の入力を受け付ける。
【0028】
自車両の制御装置は、レーダ装置1から入力された物体検知情報に基づいて車両の走行速度等を制御する制動制御、降雨状態検知情報に基づいてワイパの運転/停止を制御するワイパ制御、日射量検知情報に基づいて自車両のライトの点灯/消灯を制御するライト制御や、オートエアコンの運転を制御する空調制御等を行う。
【0029】
このレーダ装置1は、例えば図2に示すように、LD31、雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43を、自車両のフロントガラスの上方の車内側に取り付ける。
【0030】
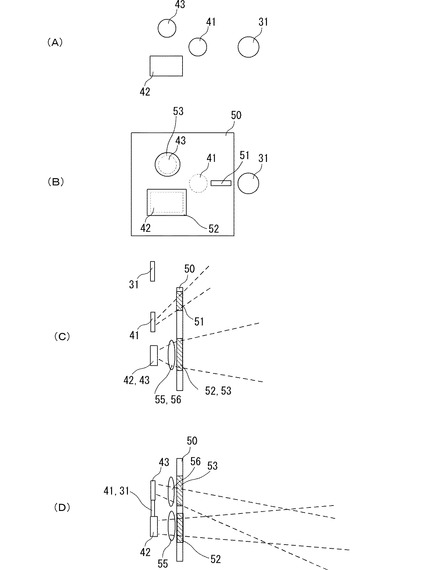
図3(A)は、LD、雨滴検知用PD、第1の物体検知用PD、および第2の物体検知用PDの位置関係を示す図である。図3(A)に示すように、雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43は、LD31に対して一方の側に集めている。すなわち、雨滴検知用PD41と、第1の物体検知用PD42、および第2の物体検知用PD43と、を、LD31を挟んで両側に分けないことで、LD31、雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43の配置に必要なスペースを抑え、小型化を図っている。
【0031】
第1の物体検知用PD42は、第2の物体検知用PD43のほぼ真下に配置している。また、雨滴検知用PD41は、第1の物体検知用PD42、および第2の物体検知用PD43よりも、LD31側に配置している。
【0032】
雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43の前方には、図3(B)、(C)、(D)に示す視野制限部材50が配置されている。図3(B)は、正面から見た平面図である。図3(C)は、上面からみた平面図である。図3(D)は、側面から見た平面図である。図3(C)では、第1の物体検知用PD42と第2の物体検知用PD43とが紙面に対して垂直方向に重なっている。また、図3(D)では、LD31と、雨滴検知用PD41とが紙面に対して垂直方向に重なっている。
【0033】
この視野制限部材50には、窓部51、52、53が形成されている。この視野制限部材50は、雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43のそれぞれについて、LD31が照射したレーザ光の反射光を受光する検知視野を制限する。
【0034】
窓部51は、水平方向に長いスリット形状であり、雨滴検知用PD41とほぼ同じ高さである。窓部51の中心は、雨滴検知用PD41の受光面の中心に対向する位置よりも、水平方向にLD31側にずらしている。ここでは、図3(B)に示すように、正面から見て、窓部51と、雨滴検知用PD41の受光面とが重ならないように構成している。雨滴検知用PD41は、この窓部51を通過した光を受光する。後述する雨滴検知用PD41の検知視野は、この雨滴検知用PD41の受光面と、窓部51との関係により定まる。
【0035】
窓部52の中心は、第1の物体検知用PD42の受光面の中心に対向している。図3(C)、(D)に示す55は、窓部52を通過した物体からの反射光を第1の物体検知用PD42の受光面に結像する結像レンズである。後述する第1の物体検知用PD42の検知視野は、第1の物体検知用PD42の受光面と、この結像レンズ55との関係により定まる。
【0036】
窓部53の中心は、第2の物体検知用PD43の受光面の中心に対向している。図3(C)、(D)に示す56は、窓部53を通過した物体からの反射光を第2の物体検知用PD43の受光面に集光する集光レンズである。後述する第2の物体検知用PD43の検知視野は、第2の物体検知用PD43の受光面と、この集光レンズ56との関係により定まる。
【0037】
なお、図3(C)では、集光レンズ56と、結像レンズ55とが紙面に対して垂直方向に重なっているとともに、窓部52と、窓部53とが紙面に対して垂直方向に重なっている。また、図3(C)では、窓部52と、窓部53との間に位置する窓部51の図示を省略している。また、図3(C)に示す破線は、雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43の検知視野を示す。また、図3(D)に示す破線は、第1の物体検知用PD42、および第2の物体検知用PD43の検知視野を示す。図3(D)では、雨滴検知用PD41の検知視野が、第1の物体検知用PD42、および第2の物体検知用PD43の検知視野と紙面に対して垂直方向に重なっているので、図示を省略している。
【0038】
次に、LD31から照射されるレーザ光の照射領域と、雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43が反射光を受光する検知視野と、の関係について説明する。
【0039】
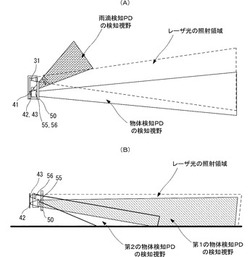
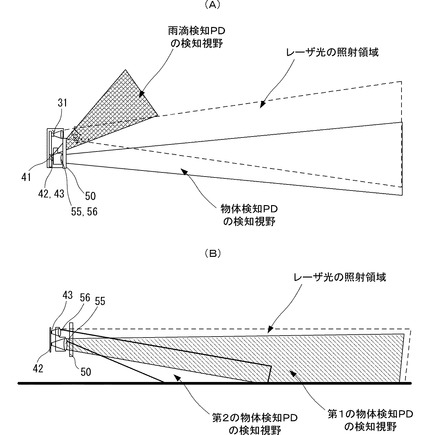
図4は、LDによるレーザ光の照射領域と、雨滴検知用PD、第1の物体検知用PD、および第2の物体検知用PDの検知視野と、の関係を示す図である。図4(A)は、水平方向の平面図であり、図4(B)は、垂直方向の平面図である。LD31から照射されたレーザ光は、このLD31の発光面に対向して配置した投光レンズ(不図示)により、図4に破線で示す領域に照射される。投光レンズは、例えば、レーザ光を水平方向16°、垂直方向26°の拡がり角で照射する。図4(B)に示すように、投光レンズは、レーザ光が上方に拡がるのを抑え、下方に拡がるようにしており、道路の上方に取り付けられている道路標識等の表示板にレーザ光が照射されるのを抑えている(道路の上方に取り付けられている表示板等からの反射光を受光するのを抑えている。)。
【0040】
雨滴検知用PD41の検知視野は、図4(A)においてハッチングで示す領域である。すなわち、雨滴検知用PD41の受光面と、視野制限部材50の窓部51との位置関係を、図4(A)においてハッチングで示す領域が雨滴検知用PD41の検知視野になるように設定している。また、雨滴検知用PD41の受光面は、正面からの反射光の受光を抑えるために、検知視野の方向に傾けて取り付けておくのが好ましい。雨滴検知用PD41は、その検知視野と、LD31によるレーザ光の照射領域とが重なる領域(以下、雨滴検知領域と言う。)における、雨滴からの反射光を受光する。自車両のボンネット上の空間が、この雨滴検知領域になるように、視野制限部材50により雨滴検知用PD41の検知視野を制限している。
【0041】
第1の物体検知用PD42、および第2の物体検知用PD43の検知視野は、図4(A)に示すように、水平方向においては略重なっている。第2の物体検知用PD43は、第1の物体検知用PD42よりも近い位置にある車両等の物体を検知するためのものである。このため、第2の物体検知用PD43の検知視野は、図4(B)に示すように、第1の物体検知用PD42の検知視野よりも、下方に下げている。図4(B)においてハッチングで示す領域が第1の物体検知用PD42の検知視野であり、実線で囲んで領域が第2の物体検知用PD43の検知視野である。
【0042】
なお、図4(B)では、雨滴検知用PD41の検知視野が、第1の物体検知用PD42、および第2の物体検知用PD43の検知視野と紙面に対して垂直方向に重なっているので、図示を省略している。
【0043】
第1の物体検知用PD42の検知視野が、図4(A)、(B)において示した領域になるように、第1の物体検知用PD42の受光面と、結像レンズ55との位置関係を設定している。第1の物体検知用PD42の検知視野は、例えば水平方向13°、垂直方向12°で拡げている。また、第2の物体検知用PD43の検知視野が、図4(A)、(B)において示した領域になるように、第2物体検知用PD42の受光面と、集光レンズ56との位置関係を設定している。第2の物体検知用PD43の検知視野は、例えば水平方向13°、垂直方向10°で拡げている。
【0044】
第1の物体検知用PD42は、その検知視野と、LD31によるレーザ光の照射領域とが重なる領域(以下、第1の物体検知領域と言う。)における、物体からの反射光を受光する。また、第2の物体検知用PD43は、その検知視野と、LD31によるレーザ光の照射領域とが重なる領域(以下、第2の物体検知領域と言う。)における、物体からの反射光を受光する。
【0045】
図4(A),(B)で示すように、第1の物体検知領域と、第2の物体検知領域とは、その一部が重なっている。一方、雨滴検知領域は、第1の物体検知領域、および第2の物体検知領域のそれぞれと重なっていない。
【0046】
ここで、雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43による物体の検知について説明する。LD31は、上述したように、予め定めたパルス幅のレーザ光を前方に照射する。
【0047】
雨滴検知領域は、上述したように、自車両のボンネット上の空間である。したがって、雨滴検知用PD41が受光する反射光は、LD31が照射したレーザ光が雨滴検知領域における雨滴からの反射光である。自車両周辺における降雨量が多くなるにつれて、その雨滴が多くなるので、雨滴検知用PD41で受光される反射光量が増大する。制御部2は、雨滴検知用PD41で受光した雨滴からの反射光量に基づき、降雨なし、降雨量小、降雨量中、降雨量大等の複数段階のいずれであるかを判断する。制御部2における、この降雨状態の判断結果が入出力部6から自車両の制御装置(不図示)に出力される。
【0048】
このように、視野制限部材50によって、自車両周辺における雨滴からの反射光を雨滴検知用PD41で精度よく検知することができるので、自車両周辺における降雨状態の検知が精度よく行える。
【0049】
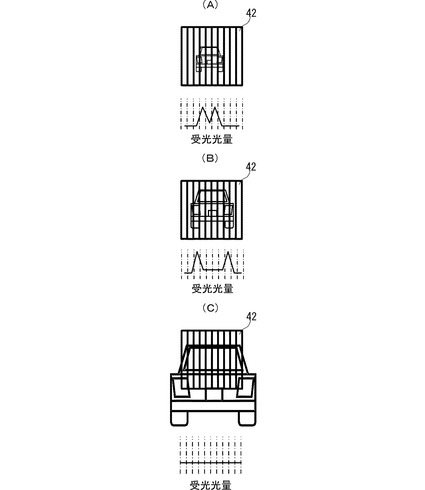
次に、第1の物体検知用PD42による物体の検知について説明する。図5は、前方車両との距離の違いによる、第1の物体検知用PDの受光面に結像される前方車両、および各受光領域の受光光量を示す概略図である。図5(A)は、前方車両までの距離が20m程度であり、図5(B)は、前方車両までの距離が10m程度であり、図5(C)は、前方車両までの距離が3m程度である。
【0050】
図5に示すように、前方車両との距離が長いときには、第1の物体検知用PD42の受光面に、前方車両全体が結像される。LD31は、予め定めたパルス幅のレーザ光を前方に照射する。前方車両との距離が長いときには、LD31が照射したレーザ光が前方車両全体に照射され、その反射光を第1の物体検知用PD42で受光できる。図5(A)、(B)に示す、第1の物体検知用PD42の受光領域において、受光光量が大きい領域は、前方車両の左右両側に取り付けられているリフレクタからの反射光を受光している。
【0051】
制御部2は、LD31がレーザ光を照射した時刻t1と、第1の物体検知用PD42が反射光を受光した時刻t2とを用いて、この前方車両までの距離Dを、
D=(t2−t1)×c/2 (ただし、cは光速)
により算出する。
【0052】
また、制御部2は、自車両に対する物体の水平方向の位置Xについては、反射光を受光した第1の物体検知用PD42の分割した受光領域(10個の受光領域)毎に、その受光領域に対して予め定めた係数α(α1〜α10)を用いて、
X=α×Dtanθ (ただし、θは第1の物体検知用PD42における検知視野の水平方向の拡がり角)
により算出する。
【0053】
なお、第1の物体検知用PD42の各受光領域に対して予め定める係数α(α1〜α10)は、LD31によるレーザ光の照射領域と、第1の物体検知用PD42の検知視野との相対的な位置関係に基づいて決めておけばよい。
【0054】
したがって、このレーダ装置1は、LD31が照射するレーザ光を水平方向に走査することなく、自車両の前方に位置する物体までの距離、および水平方向の位置の検知が行える。
【0055】
一方、図5(C)に示すように、前方車両との距離が短いときには、第1の物体検知用PD42の受光面に、前方車両の上部(前方車両の後部のウィンドウ周辺)が結像される。また、前方車両の後部のウィンドウは、LD31から照射されたレーザ光に対する反射率が低い。このため、第1の物体検知用PD42が、前方車両の後部のウィンドウからの反射光を検出できず、この前方車両を物体として検知できない可能性がある。
【0056】
しかしながら、図4(B)に示したように、第2の物体検知用PD43は、その検知視野を、第1の物体検知用PD42の検知視野よりも下げているので、前方車両との距離が短いときには、第2の物体検知用PD43が、前方車両のリフレクタからの反射光を受光する。制御部2は、LD31がレーザ光を照射した時刻t1と、第2の物体検知用PD43が反射光を受光した時刻t3とを用いて、この前方車両までの距離Dを、
D=(t3−t1)×c/2 (ただし、cは光速)
により算出する。
【0057】
したがって、このレーダ装置1は、前方車両との距離が短いときであっても、第2の物体検知用PD43における反射光の受光により、この前方車両までの距離の検知が行える。
【0058】
このように、このレーダ装置1は、雨滴検知用PD41により自車両周辺における雨滴からの反射光を精度よく検知することができるとともに、第1の物体検知用PD42、および第2の物体検知用PD43により、自車両の前方に位置する前方車両等の物体を精度よく検知することができる。
【0059】
なお、上記の説明では、本願発明で言う探査波としてレーザ光を使用する場合を例にして説明したが、探査波は、レーザ光に限らず、ミリ波等も使用できる。
【符号の説明】
【0060】
1…レーダ装置
2…制御部
3…照射部
4…検知部
5…日射センサ
6…入出力部
31…LD(レーザダイオード)
32…LD駆動回路
41…雨滴検知用PD(雨滴検知用フォトダイオード)
42…第1の物体検知用PD(第1の物体検知用フォトダイオード)
43…第2の物体検知用PD(第2の物体検知用フォトダイオード)
44…受光回路
50…視野制限部材
51〜53…窓部
55…結像レンズ
56…集光レンズ
【技術分野】
【0001】
この発明は、レーザ光等を探査波として前方に照射し、その反射波を検知することにより、前方に位置する物体を検知する物体検知装置に関する。
【背景技術】
【0002】
従来、車両に取り付け、レーザ光や電波等の探査波を自車両の前方に照射し、その反射波を検知することで、自車両の前方に位置する先行車両等の物体の検知、および検知した物体までの距離を測定するレーダ装置がある。このレーダ装置の測定結果は、先行車両との車間距離を一定に保つ定車間距離追従走行(ACC:Adaptive Cruise Control)や渋滞時(低速時)の追従走行(LSF:Low Speed Following)等の車両の走行制御に利用できる。また、このレーダ装置は、自車両前方に位置する、衝突が避けられない先行車両や停止物を検知した場合に、制動を掛けて衝突時の被害を軽減するプリクラッシュセーフティシステムにも利用できる。
【0003】
また、レーダ装置には、降雨状態を判断し、車両のワイパの自動制御にも利用できる雨滴検知機能を一体化した構成のものもある(特許文献1参照)。特許文献1は、前方に照射するレーザ光が透過する投受光面(ガラスまたは合成樹脂による透過窓部)において乱反射した光を受光する受光素子(汚れ検知用PD)と、投受光面を透過して前方に位置する物体で反射された反射光を受光する受光素子(測距用PD)と、を備えている。特許文献1は、所定期間(例えば、10分)毎に、その所定期間における、汚れ検知用PDの受光量の変化に基づき、投受光面における雨滴の付着状況、すなわち雨量、を検知する処理を繰り返し、降雨状態を検知している。また、特許文献1は、測距用PDでの反射光の受光により、前方に位置する物体の検知や、この物体までの距離等の測定を行う。
【0004】
しかしながら、レーダ装置は、汚れ検知用PDが前方に位置する物体等からの反射光の受光を十分に抑えなければ、降雨状態を精度よく検知できない。すなわち、レーダ装置における降雨状態の検知精度を向上させるには、汚れ検知用PDにおける前方に位置する物体等からの反射光の受光を低減しなければならない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平10−329653号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
この発明の目的は、前方に位置する物体の検知および降雨状態の検知の両機能を有する物体検知装置において、前方の物体からの反射光受光による影響を低減させて降雨状態の検知精度を向上させる点にある。
【課題を解決するための手段】
【0007】
この発明の物体検知装置は、上記課題を解決し、その目的を達するために、以下のように構成している。
【0008】
照射部が、前方に探査波を照射する。この探査波は、例えばレーザ光やミリ波である。
【0009】
検知部が、照射部が照射した探査波について、その反射波を検知する第1、および第2の検知素子を有する。
【0010】
判断部は、第1の検知素子で検知した反射波の強度に基づき、前方における降雨状態を判断する。また、判断部は、第2の検知素子で検知した反射波の強度に基づき、前方に位置する物体の有無を判断する。
【0011】
さらに、視野制限部材を、第1の検知素子の前方に配置している。この視野制限部材は、第1の検知素子が反射波を検知する視野を、第2検知素子が反射波を検知する視野と異ならせている。例えば、第1の検知素子は、数十cm周辺の範囲における雨滴からの反射波を検知し、第2の検知素子は、例えば、数m〜数十mの範囲に位置する物体からの反射波を検知するように、それぞれの検知視野を視野制限部材により制限している。このように、第1の検知素子と、第2の検知素子とで、検知する反射波を反射した物体が異なる。
【0012】
したがって、視野制限部材によって、第1の検知素子が雨滴からの反射波を精度よく検知し、第2の検知素子が前方に位置する物体からの反射波を検知するように、その検知視野を制限することで、前方に位置する物体の検知、および降雨状態の検知が精度よく行える。
【0013】
また、雨滴からの反射波は、物体からの反射波に比べて極めて小さいので、視野制限部材は、第1の検知素子の視野を、第2の検知素子の視野よりも照射部に近い位置で反射された反射波を検知する視野に制限するのが好ましい。
【0014】
また、視野制限部材は、例えば、第1の検知素子、および第2の検知素子毎に、その検知素子が検知する反射波を通過させる窓部を形成した部材で構成できる。
【発明の効果】
【0015】
この発明によれば、前方に位置する物体の検知、および降雨状態の検知が精度よく行える。
【図面の簡単な説明】
【0016】
【図1】レーダ装置の主要部の構成を示すブロック図である。
【図2】車両における、LDやPDの取り付け位置を説明する図である。
【図3】LDやPDの配置関係を説明する図である。
【図4】レーザ光の照射領域、および各受光素子の検知視野の関係を説明する図である。
【図5】前方車両との距離の違いによる、第1の物体検知用PDの受光面に結像される前方車両、および角受光領域の受光光量を示す概略図である。
【発明を実施するための形態】
【0017】
以下、この発明の実施形態であるレーダ装置について説明する。
【0018】
図1は、このレーダ装置の主要部の構成を示すブロック図である。レーダ装置1は、制御部2と、照射部3と、検知部4と、日射センサ5と、入出力部6と、を備えている。このレーダ装置1は、車両に搭載される。レーダ装置1は、搭載した車両(以下、自車両と言う。)の前方にレーザ光を探査波として照射し、その反射光を検知することにより、自車両の前方に位置する物体の検知を行う。また、このレーダ装置1は、自車両周辺の雨滴からの反射光を検知することにより、自車両周辺の降雨状態を検知する降雨状態検知機能も有している。
【0019】
制御部2は、レーダ装置1本体各部の動作を制御する。この制御部2が、請求項における判断部の機能を有する。
【0020】
照射部3は、レーザダイオード31(以下、LD31と言う。)と、LD駆動回路32とを有している。LD駆動回路32は、制御部2からの指示にしたがって、LD31を発光させ、パルス状のレーザ光を自車両の前方に照射する。
【0021】
検知部4は、雨滴検知用フォトダイオード41(以下、雨滴検知用PD41と言う。)と、第1の物体検知用フォトダイオード42(以下、第1の物体検知用PD42と言う。)と、第2の物体検知用フォトダイオード43(以下、第2の物体検知用PD43と言う。)と、受光回路44と、を有している。
【0022】
雨滴検知用PD41が、この発明で言う第1の検知素子に相当する。この雨滴検知用PD41は、受光量が比較的小さい領域において、その受光量に応じた信号を出力するAPD(アバランシェフォトダイオード)を使用するのが好ましい。
【0023】
第1の物体検知用PD42は、受光領域を水平方向にn分割(ここでは、10分割)した受光素子である。第2の物体検知用PD43は、受光領域を分割していない(受光領域が1つである。)受光素子である。この第1の物体検知用PD42、および第2の物体検知用PD43は、受光量が比較的大きい領域において、その受光量に応じた信号を出力するPIN型フォトダイオードを使用するのが好ましい。第1の物体検知用PD42は、自車両の前方、約7m〜20mに位置する前方車両の両側に取り付けられているリフレクタ(反射板)からの反射光を分割している領域で個別に受光するためのものである。第2の物体検知用PD43は、自車両の前方、約7m以内に位置する前方車両等の物体からの反射光を受光するためのものである。
【0024】
第1の物体検知用PD42、または第2の物体検知用PD43の一方が、この発明で言う第2の検知素子に相当する。
【0025】
受光回路44は、雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43毎に、その出力信号の積算や増幅等を行う。また、受光回路44は、第1の物体検知用PD42については、分割している受光領域毎に、その出力信号の積算や増幅等を行う。
【0026】
日射センサ5は、日射量を検知する。
【0027】
入出力部6は、検知した前方車両等の物体の位置(自車両との相対位置)等を示す物体検知情報、自車両周辺における降雨状態を示す降雨状態検知情報、自車両周辺における日射量を示す日射量検知情報等を、自車両の制御装置(不図示)に出力する。また、入出力部6は、自車両の制御装置から、自車両の走行速度等の車両状態情報の入力を受け付ける。
【0028】
自車両の制御装置は、レーダ装置1から入力された物体検知情報に基づいて車両の走行速度等を制御する制動制御、降雨状態検知情報に基づいてワイパの運転/停止を制御するワイパ制御、日射量検知情報に基づいて自車両のライトの点灯/消灯を制御するライト制御や、オートエアコンの運転を制御する空調制御等を行う。
【0029】
このレーダ装置1は、例えば図2に示すように、LD31、雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43を、自車両のフロントガラスの上方の車内側に取り付ける。
【0030】
図3(A)は、LD、雨滴検知用PD、第1の物体検知用PD、および第2の物体検知用PDの位置関係を示す図である。図3(A)に示すように、雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43は、LD31に対して一方の側に集めている。すなわち、雨滴検知用PD41と、第1の物体検知用PD42、および第2の物体検知用PD43と、を、LD31を挟んで両側に分けないことで、LD31、雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43の配置に必要なスペースを抑え、小型化を図っている。
【0031】
第1の物体検知用PD42は、第2の物体検知用PD43のほぼ真下に配置している。また、雨滴検知用PD41は、第1の物体検知用PD42、および第2の物体検知用PD43よりも、LD31側に配置している。
【0032】
雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43の前方には、図3(B)、(C)、(D)に示す視野制限部材50が配置されている。図3(B)は、正面から見た平面図である。図3(C)は、上面からみた平面図である。図3(D)は、側面から見た平面図である。図3(C)では、第1の物体検知用PD42と第2の物体検知用PD43とが紙面に対して垂直方向に重なっている。また、図3(D)では、LD31と、雨滴検知用PD41とが紙面に対して垂直方向に重なっている。
【0033】
この視野制限部材50には、窓部51、52、53が形成されている。この視野制限部材50は、雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43のそれぞれについて、LD31が照射したレーザ光の反射光を受光する検知視野を制限する。
【0034】
窓部51は、水平方向に長いスリット形状であり、雨滴検知用PD41とほぼ同じ高さである。窓部51の中心は、雨滴検知用PD41の受光面の中心に対向する位置よりも、水平方向にLD31側にずらしている。ここでは、図3(B)に示すように、正面から見て、窓部51と、雨滴検知用PD41の受光面とが重ならないように構成している。雨滴検知用PD41は、この窓部51を通過した光を受光する。後述する雨滴検知用PD41の検知視野は、この雨滴検知用PD41の受光面と、窓部51との関係により定まる。
【0035】
窓部52の中心は、第1の物体検知用PD42の受光面の中心に対向している。図3(C)、(D)に示す55は、窓部52を通過した物体からの反射光を第1の物体検知用PD42の受光面に結像する結像レンズである。後述する第1の物体検知用PD42の検知視野は、第1の物体検知用PD42の受光面と、この結像レンズ55との関係により定まる。
【0036】
窓部53の中心は、第2の物体検知用PD43の受光面の中心に対向している。図3(C)、(D)に示す56は、窓部53を通過した物体からの反射光を第2の物体検知用PD43の受光面に集光する集光レンズである。後述する第2の物体検知用PD43の検知視野は、第2の物体検知用PD43の受光面と、この集光レンズ56との関係により定まる。
【0037】
なお、図3(C)では、集光レンズ56と、結像レンズ55とが紙面に対して垂直方向に重なっているとともに、窓部52と、窓部53とが紙面に対して垂直方向に重なっている。また、図3(C)では、窓部52と、窓部53との間に位置する窓部51の図示を省略している。また、図3(C)に示す破線は、雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43の検知視野を示す。また、図3(D)に示す破線は、第1の物体検知用PD42、および第2の物体検知用PD43の検知視野を示す。図3(D)では、雨滴検知用PD41の検知視野が、第1の物体検知用PD42、および第2の物体検知用PD43の検知視野と紙面に対して垂直方向に重なっているので、図示を省略している。
【0038】
次に、LD31から照射されるレーザ光の照射領域と、雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43が反射光を受光する検知視野と、の関係について説明する。
【0039】
図4は、LDによるレーザ光の照射領域と、雨滴検知用PD、第1の物体検知用PD、および第2の物体検知用PDの検知視野と、の関係を示す図である。図4(A)は、水平方向の平面図であり、図4(B)は、垂直方向の平面図である。LD31から照射されたレーザ光は、このLD31の発光面に対向して配置した投光レンズ(不図示)により、図4に破線で示す領域に照射される。投光レンズは、例えば、レーザ光を水平方向16°、垂直方向26°の拡がり角で照射する。図4(B)に示すように、投光レンズは、レーザ光が上方に拡がるのを抑え、下方に拡がるようにしており、道路の上方に取り付けられている道路標識等の表示板にレーザ光が照射されるのを抑えている(道路の上方に取り付けられている表示板等からの反射光を受光するのを抑えている。)。
【0040】
雨滴検知用PD41の検知視野は、図4(A)においてハッチングで示す領域である。すなわち、雨滴検知用PD41の受光面と、視野制限部材50の窓部51との位置関係を、図4(A)においてハッチングで示す領域が雨滴検知用PD41の検知視野になるように設定している。また、雨滴検知用PD41の受光面は、正面からの反射光の受光を抑えるために、検知視野の方向に傾けて取り付けておくのが好ましい。雨滴検知用PD41は、その検知視野と、LD31によるレーザ光の照射領域とが重なる領域(以下、雨滴検知領域と言う。)における、雨滴からの反射光を受光する。自車両のボンネット上の空間が、この雨滴検知領域になるように、視野制限部材50により雨滴検知用PD41の検知視野を制限している。
【0041】
第1の物体検知用PD42、および第2の物体検知用PD43の検知視野は、図4(A)に示すように、水平方向においては略重なっている。第2の物体検知用PD43は、第1の物体検知用PD42よりも近い位置にある車両等の物体を検知するためのものである。このため、第2の物体検知用PD43の検知視野は、図4(B)に示すように、第1の物体検知用PD42の検知視野よりも、下方に下げている。図4(B)においてハッチングで示す領域が第1の物体検知用PD42の検知視野であり、実線で囲んで領域が第2の物体検知用PD43の検知視野である。
【0042】
なお、図4(B)では、雨滴検知用PD41の検知視野が、第1の物体検知用PD42、および第2の物体検知用PD43の検知視野と紙面に対して垂直方向に重なっているので、図示を省略している。
【0043】
第1の物体検知用PD42の検知視野が、図4(A)、(B)において示した領域になるように、第1の物体検知用PD42の受光面と、結像レンズ55との位置関係を設定している。第1の物体検知用PD42の検知視野は、例えば水平方向13°、垂直方向12°で拡げている。また、第2の物体検知用PD43の検知視野が、図4(A)、(B)において示した領域になるように、第2物体検知用PD42の受光面と、集光レンズ56との位置関係を設定している。第2の物体検知用PD43の検知視野は、例えば水平方向13°、垂直方向10°で拡げている。
【0044】
第1の物体検知用PD42は、その検知視野と、LD31によるレーザ光の照射領域とが重なる領域(以下、第1の物体検知領域と言う。)における、物体からの反射光を受光する。また、第2の物体検知用PD43は、その検知視野と、LD31によるレーザ光の照射領域とが重なる領域(以下、第2の物体検知領域と言う。)における、物体からの反射光を受光する。
【0045】
図4(A),(B)で示すように、第1の物体検知領域と、第2の物体検知領域とは、その一部が重なっている。一方、雨滴検知領域は、第1の物体検知領域、および第2の物体検知領域のそれぞれと重なっていない。
【0046】
ここで、雨滴検知用PD41、第1の物体検知用PD42、および第2の物体検知用PD43による物体の検知について説明する。LD31は、上述したように、予め定めたパルス幅のレーザ光を前方に照射する。
【0047】
雨滴検知領域は、上述したように、自車両のボンネット上の空間である。したがって、雨滴検知用PD41が受光する反射光は、LD31が照射したレーザ光が雨滴検知領域における雨滴からの反射光である。自車両周辺における降雨量が多くなるにつれて、その雨滴が多くなるので、雨滴検知用PD41で受光される反射光量が増大する。制御部2は、雨滴検知用PD41で受光した雨滴からの反射光量に基づき、降雨なし、降雨量小、降雨量中、降雨量大等の複数段階のいずれであるかを判断する。制御部2における、この降雨状態の判断結果が入出力部6から自車両の制御装置(不図示)に出力される。
【0048】
このように、視野制限部材50によって、自車両周辺における雨滴からの反射光を雨滴検知用PD41で精度よく検知することができるので、自車両周辺における降雨状態の検知が精度よく行える。
【0049】
次に、第1の物体検知用PD42による物体の検知について説明する。図5は、前方車両との距離の違いによる、第1の物体検知用PDの受光面に結像される前方車両、および各受光領域の受光光量を示す概略図である。図5(A)は、前方車両までの距離が20m程度であり、図5(B)は、前方車両までの距離が10m程度であり、図5(C)は、前方車両までの距離が3m程度である。
【0050】
図5に示すように、前方車両との距離が長いときには、第1の物体検知用PD42の受光面に、前方車両全体が結像される。LD31は、予め定めたパルス幅のレーザ光を前方に照射する。前方車両との距離が長いときには、LD31が照射したレーザ光が前方車両全体に照射され、その反射光を第1の物体検知用PD42で受光できる。図5(A)、(B)に示す、第1の物体検知用PD42の受光領域において、受光光量が大きい領域は、前方車両の左右両側に取り付けられているリフレクタからの反射光を受光している。
【0051】
制御部2は、LD31がレーザ光を照射した時刻t1と、第1の物体検知用PD42が反射光を受光した時刻t2とを用いて、この前方車両までの距離Dを、
D=(t2−t1)×c/2 (ただし、cは光速)
により算出する。
【0052】
また、制御部2は、自車両に対する物体の水平方向の位置Xについては、反射光を受光した第1の物体検知用PD42の分割した受光領域(10個の受光領域)毎に、その受光領域に対して予め定めた係数α(α1〜α10)を用いて、
X=α×Dtanθ (ただし、θは第1の物体検知用PD42における検知視野の水平方向の拡がり角)
により算出する。
【0053】
なお、第1の物体検知用PD42の各受光領域に対して予め定める係数α(α1〜α10)は、LD31によるレーザ光の照射領域と、第1の物体検知用PD42の検知視野との相対的な位置関係に基づいて決めておけばよい。
【0054】
したがって、このレーダ装置1は、LD31が照射するレーザ光を水平方向に走査することなく、自車両の前方に位置する物体までの距離、および水平方向の位置の検知が行える。
【0055】
一方、図5(C)に示すように、前方車両との距離が短いときには、第1の物体検知用PD42の受光面に、前方車両の上部(前方車両の後部のウィンドウ周辺)が結像される。また、前方車両の後部のウィンドウは、LD31から照射されたレーザ光に対する反射率が低い。このため、第1の物体検知用PD42が、前方車両の後部のウィンドウからの反射光を検出できず、この前方車両を物体として検知できない可能性がある。
【0056】
しかしながら、図4(B)に示したように、第2の物体検知用PD43は、その検知視野を、第1の物体検知用PD42の検知視野よりも下げているので、前方車両との距離が短いときには、第2の物体検知用PD43が、前方車両のリフレクタからの反射光を受光する。制御部2は、LD31がレーザ光を照射した時刻t1と、第2の物体検知用PD43が反射光を受光した時刻t3とを用いて、この前方車両までの距離Dを、
D=(t3−t1)×c/2 (ただし、cは光速)
により算出する。
【0057】
したがって、このレーダ装置1は、前方車両との距離が短いときであっても、第2の物体検知用PD43における反射光の受光により、この前方車両までの距離の検知が行える。
【0058】
このように、このレーダ装置1は、雨滴検知用PD41により自車両周辺における雨滴からの反射光を精度よく検知することができるとともに、第1の物体検知用PD42、および第2の物体検知用PD43により、自車両の前方に位置する前方車両等の物体を精度よく検知することができる。
【0059】
なお、上記の説明では、本願発明で言う探査波としてレーザ光を使用する場合を例にして説明したが、探査波は、レーザ光に限らず、ミリ波等も使用できる。
【符号の説明】
【0060】
1…レーダ装置
2…制御部
3…照射部
4…検知部
5…日射センサ
6…入出力部
31…LD(レーザダイオード)
32…LD駆動回路
41…雨滴検知用PD(雨滴検知用フォトダイオード)
42…第1の物体検知用PD(第1の物体検知用フォトダイオード)
43…第2の物体検知用PD(第2の物体検知用フォトダイオード)
44…受光回路
50…視野制限部材
51〜53…窓部
55…結像レンズ
56…集光レンズ
【特許請求の範囲】
【請求項1】
前方に探査波を照射する照射部と、
前記照射部が照射した探査波について、その反射波を検知する第1、および第2の検知素子を有する検知部と、
前記第1の検知素子で検知した反射波の強度に基づき、前方における降雨状態を判断し、且つ、前記第2の検知素子で検知した反射波の強度に基づき、前方に位置する物体の有無を判断する判断部と、を備えた物体検知装置であって、
前記第1の検知素子が反射波を検知する視野を、前記第2検知素子が反射波を検知する視野と異ならせる視野制限部材を、前記第1の検知素子の前方に配置した、物体検知装置。
【請求項2】
前記視野制限部材は、前記第1の検知素子の視野を、前記第2の検知素子の視野よりも前記照射部に近い位置で反射された反射波を検知する視野に制限する、請求項1に記載の物体検知装置。
【請求項3】
前記視野制限部材は、前記第1の検知素子、および前記第2の検知素子毎に、その検知素子が検知する反射波を通過させる窓部を形成している、請求項1、または2に記載の物体検知装置。
【請求項1】
前方に探査波を照射する照射部と、
前記照射部が照射した探査波について、その反射波を検知する第1、および第2の検知素子を有する検知部と、
前記第1の検知素子で検知した反射波の強度に基づき、前方における降雨状態を判断し、且つ、前記第2の検知素子で検知した反射波の強度に基づき、前方に位置する物体の有無を判断する判断部と、を備えた物体検知装置であって、
前記第1の検知素子が反射波を検知する視野を、前記第2検知素子が反射波を検知する視野と異ならせる視野制限部材を、前記第1の検知素子の前方に配置した、物体検知装置。
【請求項2】
前記視野制限部材は、前記第1の検知素子の視野を、前記第2の検知素子の視野よりも前記照射部に近い位置で反射された反射波を検知する視野に制限する、請求項1に記載の物体検知装置。
【請求項3】
前記視野制限部材は、前記第1の検知素子、および前記第2の検知素子毎に、その検知素子が検知する反射波を通過させる窓部を形成している、請求項1、または2に記載の物体検知装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−108914(P2013−108914A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−255677(P2011−255677)
【出願日】平成23年11月24日(2011.11.24)
【出願人】(510123839)オムロンオートモーティブエレクトロニクス株式会社 (110)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月24日(2011.11.24)
【出願人】(510123839)オムロンオートモーティブエレクトロニクス株式会社 (110)
【Fターム(参考)】
[ Back to top ]