
物体測位装置
【課題】特定の物体検出空間の天井面に過不足なく物体測位装置を配列するような場合でも、その個数を大幅に削減することができる物体測位装置を提供する。
【解決手段】複数の測位センサ素子110が自身の軸心を中心とした所定内角の円錐状に物体検出範囲OSAを発生する。このような複数の測位センサ素子110を、物体検出範囲OSAが相互に隙間なく略最小限にオーバーラップする配置にセンサ支持機構120が特定内角で放射状に支持している。このため、複数の測位センサ素子110の円錐状の物体検出範囲OSAが疑似的に一つの物体検出範囲OSAとして機能する。従って、測位センサ素子110が一個しかない従来装置に比較して物体検出範囲OSAの内角を大幅に拡開することができる。このため、特定の物体検出空間の天井面に過不足なく物体測位装置100を配列するような場合でも、その個数を大幅に削減することができる。
【解決手段】複数の測位センサ素子110が自身の軸心を中心とした所定内角の円錐状に物体検出範囲OSAを発生する。このような複数の測位センサ素子110を、物体検出範囲OSAが相互に隙間なく略最小限にオーバーラップする配置にセンサ支持機構120が特定内角で放射状に支持している。このため、複数の測位センサ素子110の円錐状の物体検出範囲OSAが疑似的に一つの物体検出範囲OSAとして機能する。従って、測位センサ素子110が一個しかない従来装置に比較して物体検出範囲OSAの内角を大幅に拡開することができる。このため、特定の物体検出空間の天井面に過不足なく物体測位装置100を配列するような場合でも、その個数を大幅に削減することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体検出範囲を移動する物体を測位する物体測位装置に関し、特に、自身の軸心を中心とした所定内角の円錐状に物体検出範囲を発生する測位センサ素子を利用した物体測位装置に関する。
【背景技術】
【0002】
現在、セキュリティや人員の動線検出などのため、物体検出範囲を移動する物体を測位する物体測位装置が利用されている。このような物体測位装置は、例えば、自身の軸心を中心とした所定内角の円錐状に物体検出範囲を発生する測位センサ素子からなる。
【0003】
より具体的には、このような測位センサ素子は、例えば、物体検出範囲の内角が70°ほどであり、有効な物体検出範囲は60°ほどとなる。物体測位装置は、このような測位センサ素子を軸心が鉛直方向となるようにセンサ支持機構で支持した構造からなる。
【0004】
このような物体測位装置を、例えば、特定の物体検出空間の天井面に配列することで、その物体検出空間の人員の移動などを検出できる。その場合、物体検出空間を自由に移動する人員を確実に検出するためには、多数の物体測位装置を、物体検出範囲が相互に隙間なく略最小限にオーバーラップするように配列する必要がある。
【0005】
当然ながら、必要な物体測位装置の個数は、上述した物体検出範囲の内角の他、物体検出空間の面積および形状、天井面から検出位置までの上下間隔、などに依存する。本発明者が、ある物体検出空間に物体測位装置を必要最小限に設置したところ、198個が必要であった。
【0006】
現在、上述のような物体測位装置として各種の提案がある(例えば、特許文献1参照)。
【特許文献1】特開2002−311125号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかし、上述のように物体検出空間の天井面に多数の物体測位装置を配列することは、施工の作業性や美観の観点から好適とはいえない。特に、一般的に天井面には、照明器具、空調機器、防災設備、スピーカユニット、等が設置されていることがある。このような場合、上述のように多数の物体測位装置を必要な位置に過不足なく配列することが困難なことがある。
【0008】
本発明は上述のような課題に鑑みてなされたものであり、特定の物体検出空間の天井面に過不足なく物体測位装置を配列するような場合でも、その個数を大幅に削減することができる物体測位装置を提供するものである。
【課題を解決するための手段】
【0009】
本発明の物体測位装置は、物体検出範囲を移動する物体を測位する物体測位装置であって、自身の軸心を中心とした所定内角の円錐状に物体検出範囲を発生する複数の測位センサ素子と、物体検出範囲が相互に隙間なく略最小限にオーバーラップする配置に複数の測位センサ素子を特定内角で放射状に支持しているセンサ支持機構と、を有する。
【0010】
従って、本発明の物体測位装置では、複数の測位センサ素子が自身の軸心を中心とした所定内角の円錐状に物体検出範囲を発生する。このような複数の測位センサ素子を、物体検出範囲が相互に隙間なく略最小限にオーバーラップする配置にセンサ支持機構が特定内角で放射状に支持している。このため、複数の測位センサ素子の円錐状の物体検出範囲が疑似的に一つの物体検出範囲として機能する。
【0011】
また、上述のような物体測位装置において、測位センサ素子は、円錐状の物体検出範囲の有効な内角がA°であり、センサ支持機構は、複数の測位センサ素子を軸心の内角が(3A/4)°となる配置で放射状に支持していてもよい。
【0012】
また、上述のような物体測位装置において、測位センサ素子は、円錐状の物体検出範囲の有効な内角が略60°であり、センサ支持機構は、複数の測位センサ素子を軸心の内角が略45°となる配置で放射状に支持していてもよい。
【0013】
また、上述のような物体測位装置において、測位センサ素子は、七個あり、センサ支持機構は、一個の測位センサ素子を中心に六個の測位センサ素子を正六角形状に支持していてもよい。
【0014】
なお、本発明の各種の構成要素は、必ずしも個々に独立した存在である必要はなく、複数の構成要素が一個の部材として形成されていること、一つの構成要素が複数の部材で形成されていること、ある構成要素が他の構成要素の一部であること、ある構成要素の一部と他の構成要素の一部とが重複していること、等でもよい。
【発明の効果】
【0015】
本発明の物体測位装置では、複数の測位センサ素子が自身の軸心を中心とした所定内角の円錐状に物体検出範囲を発生する。このような複数の測位センサ素子を、物体検出範囲が相互に隙間なく略最小限にオーバーラップする配置にセンサ支持機構が特定内角で放射状に支持している。このため、複数の測位センサ素子の円錐状の物体検出範囲が疑似的に一つの物体検出範囲として機能する。従って、測位センサ素子が一個しかない従来装置に比較して物体検出範囲の内角を大幅に拡開することができる。このため、特定の物体検出空間の天井面に過不足なく物体測位装置を配列するような場合でも、その個数を大幅に削減することができる。
【発明を実施するための最良の形態】
【0016】
本発明の実施の一形態を図面を参照して以下に説明する。なお、本実施の形態では図示するように上下方向を規定して説明する。しかし、これは構成要素の相対関係を簡単に説明するために便宜的に規定するものである。従って、本発明を実施する製品の製造時や使用時の方向を限定するものではない。
【0017】
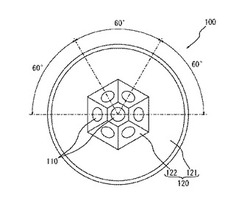
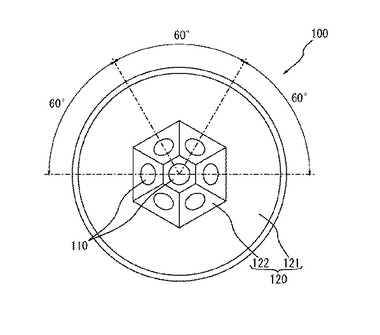
本実施の形態の物体測位装置100は、物体検出範囲を移動する物体を測位する。のため、物体測位装置100は、図1および図2に示すように、自身の軸心を中心とした所定内角の円錐状に物体検出範囲OSAを発生する複数の測位センサ素子110と、物体検出範囲OSAが相互に隙間なく略最小限にオーバーラップする配置に複数の測位センサ素子110を特定内角で放射状に支持しているセンサ支持機構120と、を有する。
【0018】
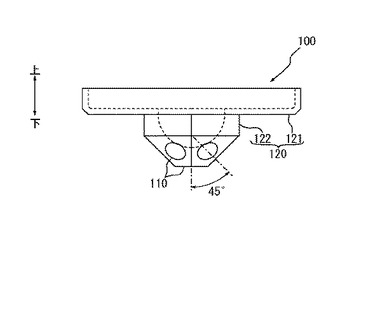
より具体的には、本実施の形態の物体測位装置100では、測位センサ素子110は、七個あり、センサ支持機構120は、一個の測位センサ素子110を中心に六個の測位センサ素子110を正六角形状に支持している。
【0019】
測位センサ素子110は、円錐状の物体検出範囲OSAの有効な内角が略60°であり、センサ支持機構120は、複数の測位センサ素子110を軸心の内角が略45°となる配置で放射状に支持している。
【0020】
このため、測位センサ素子110の物体検出範囲OSAの有効な内角をA°とすると、センサ支持機構120は複数の測位センサ素子110を軸心の内角が(3A/4)°となる配置で放射状に支持していることになる。
【0021】
なお、センサ支持機構120は、図示するように、円盤状の支持ベース部121を有しており、この支持ベース部121の下面中央から下方にセンサ支持部122が突出している。
【0022】
このセンサ支持部122は、下端が水平に形成されており、その周囲は六角錐状に形成されている。その六面は支持ベース部121の鉛直な軸心から45°に傾斜しており、このように傾斜した六面と中央の水平な下面の各々に、七個の測位センサ素子110が一個ずつ配置されている。
【0023】
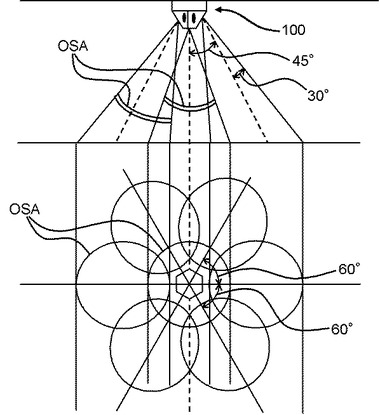
上述のような構成において、本実施の形態の物体測位装置100では、図3に示すように、複数の測位センサ素子110が自身の軸心を中心とした60°などの所定内角の円錐状に物体検出範囲OSAを発生する。
【0024】
このような複数の測位センサ素子110を、物体検出範囲OSAが相互に隙間なく略最小限にオーバーラップする配置に、センサ支持機構120が45°などの特定内角で放射状に支持している。
【0025】
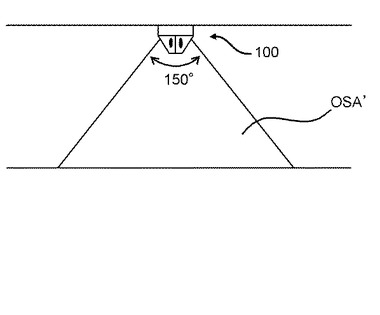
このため、本実施の形態の物体測位装置100では、図4に示すように、複数の測位センサ素子110の円錐状の物体検出範囲OSAが疑似的に一つの物体検出範囲OSA′として機能する。
【0026】
従って、測位センサ素子110が一個しかない従来装置(図示せず)に比較して物体検出範囲OSA′の内角を150°などと大幅に拡開することができる。このため、特定の物体検出空間の天井面に過不足なく物体測位装置100を配列するような場合でも、その個数を大幅に削減することができる。
【0027】
なお、前述のように、本発明者が、ある物体検出空間(図示せず)に従来の物体測位装置を必要最小限に設置したところ198個が必要であった。しかし、本実施の形態の物体測位装置を必要最小限に設置したところ、必要な個数は22個であった。従って、その施工の作業性を大幅に向上させることができ、天井面の美観も向上させることができる。
【0028】
なお、本実施の形態の物体測位装置100は、上述のように複数の測位センサ素子110が実装されているので、その検出信号の処理アルゴリズムも従来とは相違することになる。
【0029】
例えば、実装されている七個の測位センサ素子110が一個でも移動する物体を検出したときは、これを物体測位装置100の検出結果として採用する。一方、七個の測位センサ素子110が一個でもノイズを検出したときは、七個の測位センサ素子110の全部の検出結果をキャンセルする、のような信号処理が可能である。
【0030】
特に、本実施の形態の物体測位装置100では、測位センサ素子110は、円錐状の物体検出範囲OSAの有効な内角が略60°であり、センサ支持機構120は、複数の測位センサ素子110を軸心の内角が略45°となる配置で放射状に支持している。
【0031】
そして、センサ支持機構120は、一個の測位センサ素子110を中心に六個の測位センサ素子110を正六角形状に支持している。このため、有効な内角が略60°の測位センサ素子110を略最良の効率で利用することができる。
【0032】
ここで、上述のことを以下に順番に説明する。まず、測位センサ素子110の受信可能な角度は、現実には全角で70°程度であるが、測位センサ素子110の個体差等を考慮し、[1]では安全率をとり全角で60°とし、考察してゆく。
【0033】
[1]中央のセンサと周囲六個のセンサの角度説明(現状なぜ45°になっているのか)。
【0034】
内側に隙間が無いように配置を考える。測位センサ素子110一個一個の受信可能な範囲を円錐形で表現すると、図5のようになる。円錐形は適切に配置しないと隙間、つまり受信不可能な範囲が現れる。
【0035】
隙間を無くすために、円錐状の物体検出範囲OSAがオーバーラップするように測位センサ素子110の配置を決めてゆく。まず、直下に対してどの位置でも受信可能になるような測位センサ素子110の配置を検討する。
【0036】
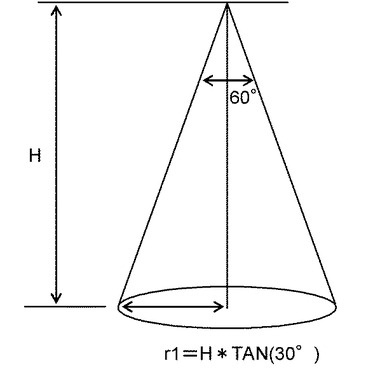
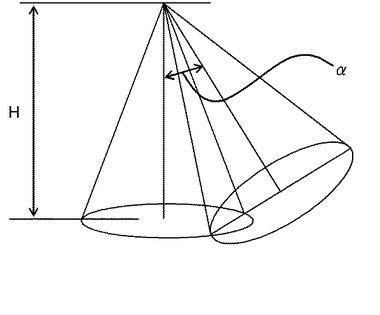
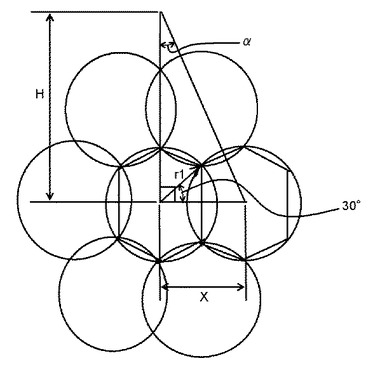
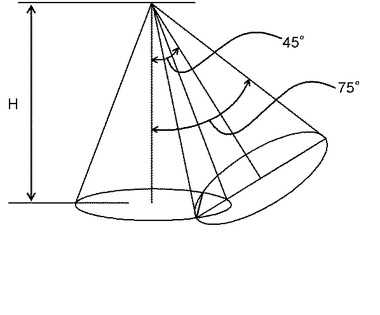
図6に示すように、二つの円錐状の物体検出範囲OSAがオーバーラップしつつ、垂線同士が角度αほど傾いている状態について考える。まず、単純なモデルとして、図7に示すように、同じ直径の円を、中心に一つ配し、その円周上に、それぞれの円が接する状態、すなわち、真下を向いた一個の測位センサ素子110に対し、六個の測位センサ素子110を六等配の角度(=60°)で配置する場合で検討を開始した。
【0037】
このとき、傾いている側、つまり円周上に並べたの測位センサ素子110の受信可能な範囲を円で近似すると上図のαは以下の式の通りとなる。外周の測位センサ素子110の有効範囲を円形とすると以下のようになる。
【0038】
[数1]
x=2*(COS(30°)*r1)
=2*(COS(30°)*(H*TAN(30°)))
=2*H*SIN(30°)
=1H
[数2]
α=ArcTan(X/H)
=45°
【0039】
つまり、測位センサ素子110の物体検出範囲OSAを円錐形とし、中心に一個、外周に60°づつ六個の合計七個を配置したとき、以上の計算より、真下を向いた中央の素子から45°の角度をつけて、外周の六個の素子を配置したとき、直下に対して受信不可の範囲が無くなる事がわかった。
【0040】
このとき、図8に示すように、物体測位装置100の全体としての受信可能な角度は、半角で75°、全角だと150度である。
【0041】
[2]外周六個の測位センサ素子110の個数の説明(現状なぜ円周を六等分にしているのか)つぎに、外周の測位センサ素子110同士の関係について考察する。
【0042】
前述の[1]に於いて、真下に一個、外周に六個の合計七個を配置することが効率がよいと分かったが、外周の六個の測位センサ素子110同士が上手く機能しているか考察する。
【0043】
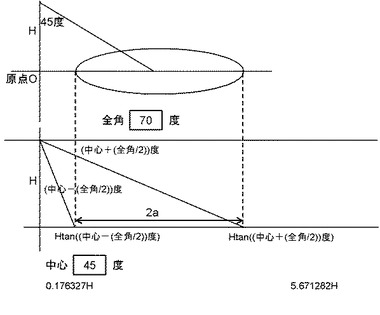
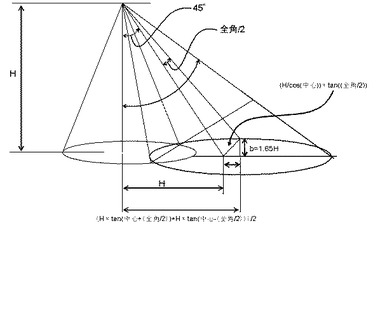
測位センサ素子110の取付け角が45°、測定可能な範囲が全角で70°のとき、高さHの床に描かれる楕円は、図9および図10に示すように、半減全角が70°なので、楕円の公式により、以下のようになる。
【0044】
[数3]
(x/a)^2+(y/b)^2=1
a=2.747477 H :(H*tan(中心+(全角/2)-H*tan(中心-(全角/2)))/2
0.990243 H :(H/cos(中心))*tan((全角/2))
1.923804 H :((H*tan(中心+(全角/2))+H*tan(中心-(全角/2)))/2)
-H*tan(中心)
b=1.649376 H
【0045】
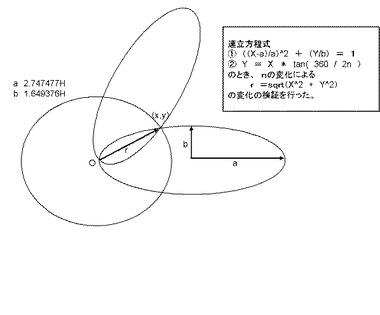
ここで、計算のために中央部の影響は小さいとし、周囲に配置する測位センサ素子110の数だけ楕円を原点から放射状に配置する。そして、図11に示すように、上で求めた楕円をいくつ並べたときにrがどのように変化するかを検証した。
【0046】
【表1】

【表2】
【0047】
結果として、六個までは測位センサ素子110を円周上に並べたとき、劇的に受信可能な範囲が広がるが、七個以上すると受信可能な範囲は広がるが、製造コストを考慮すると、六個とするのが妥当だと考える。以上の理由により、測位センサ素子110の配置を決定した。
【0048】
なお、本発明は本実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で各種の変形を許容する。例えば、上記形態では説明を簡単とするため、試作品の簡単な意匠の物体測位装置100を例示した。
【0049】
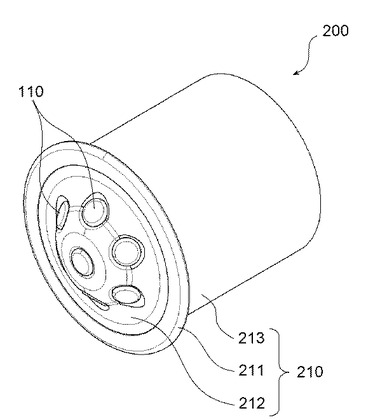
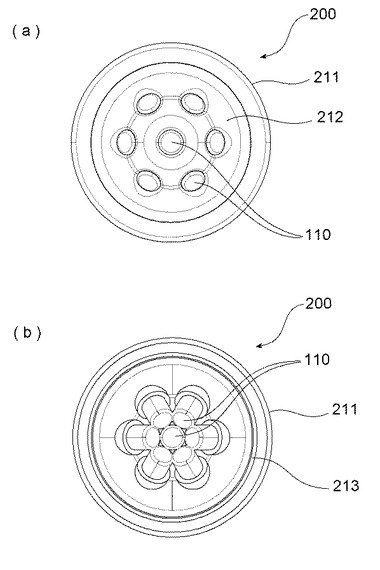
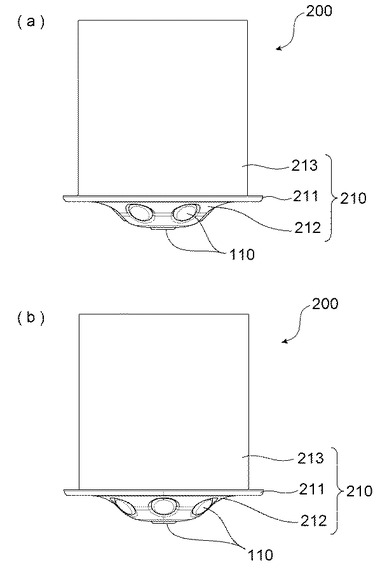
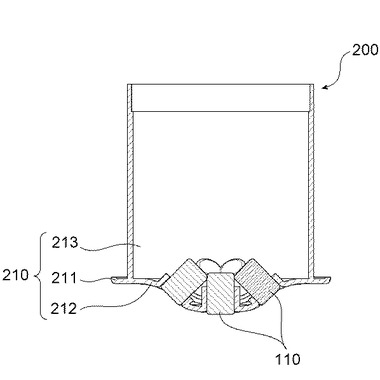
しかし、このような物体測位装置は各種にデザインすることができる。例えば、図12ないし図15に例示する物体測位装置200は、円盤状の支持ベース部211の下面に円滑な半円球状にセンサ支持部212が突出しており、その外面に七個の測位センサ素子110が配列されている。支持ベース部211の上面には円筒状のベース本体部213が形成されており、これで素子支持部材210が形成されている。
【0050】
この物体測位装置200では、センサ支持部212の突出が必要最小限であるとともに、その外形が円滑である。このため、天井面に物体測位装置200を施工したときに目立たず、天井面の美観を損なうことを抑制できる。
【0051】
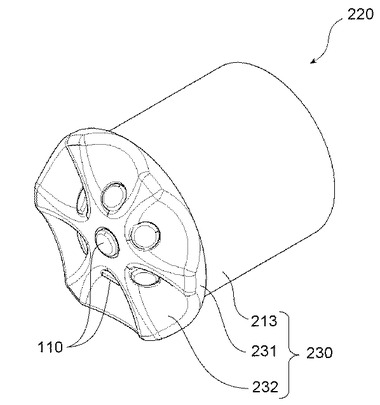
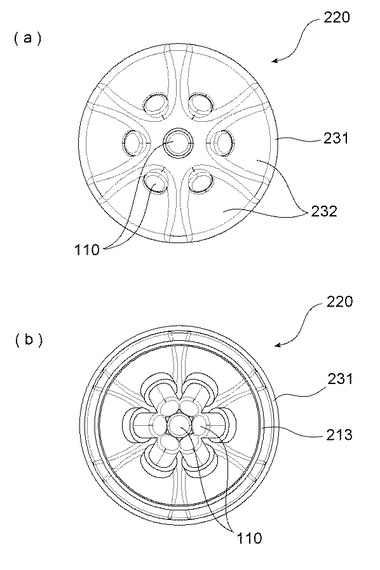
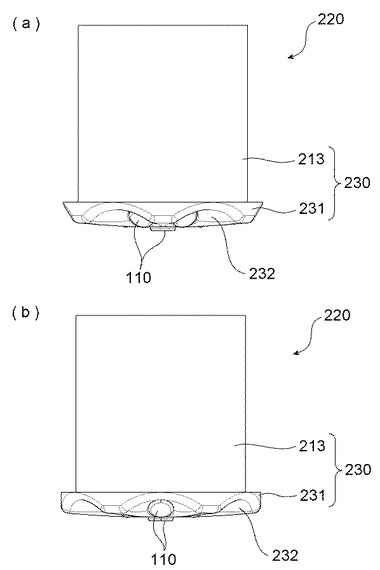
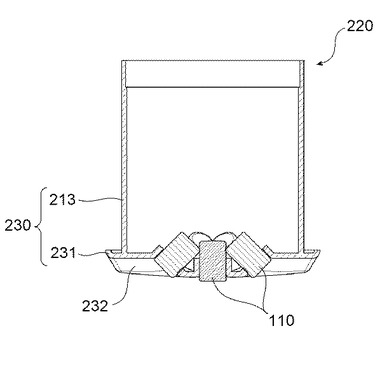
また、図16ないし図19に例示する物体測位装置220では、素子支持部材230の肉厚のある円盤状の支持ベース部231の下面に放射状に六つの凹部232が形成されており、その凹部232に測位センサ素子110が配列されている。この物体測位装置220では、さらに下面の突出を低減することができるので、さらに天井面の美観の向上を期待することができる。
【0052】
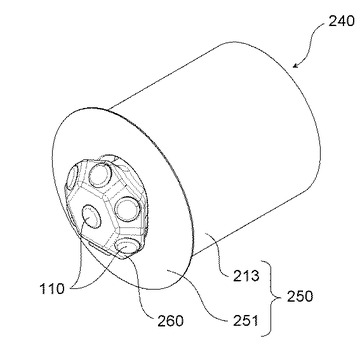
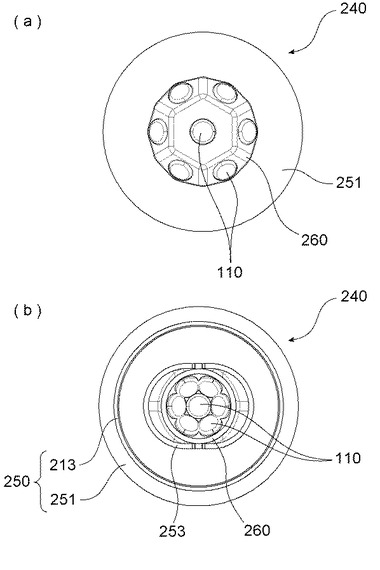
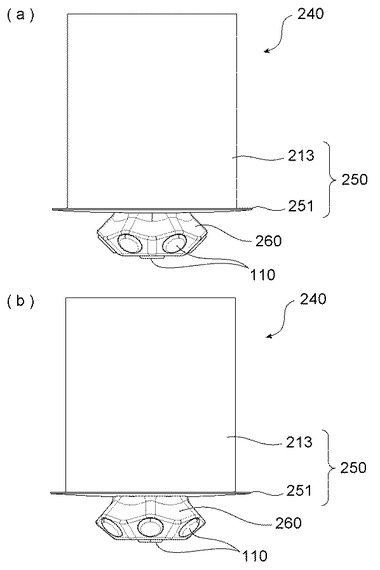
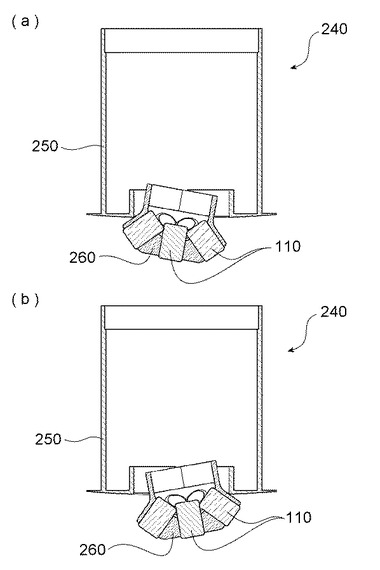
さらに、図20ないし図24に例示する物体測位装置240では、素子支持部材241が、第一支持ユニット250と第二支持ユニット260からなる。第一支持ユニット250は、円筒状のベース本体部213と円盤状の支持ベース部251からなる。
【0053】
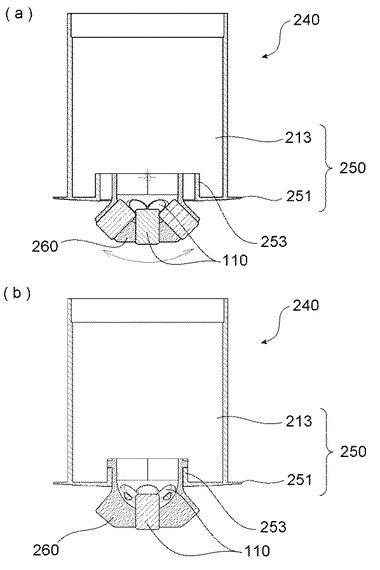
ただし、この支持ベース部251には貫通孔が形成されており、そこに第二支持ユニット260が揺動自在に軸支されている。この第二支持ユニット260は、下半部が支持ベース部251の貫通孔から下方に突出しており、そこに七個の測位センサ素子110が搭載されている。
【0054】
一方、支持ベース部251は、貫通孔に連通する円筒状部253が上方に形成されており、そこに第二支持ユニット260の上部が軸支されている。この物体測位装置240では、第二支持ユニット260が前後方向(左右方向)に揺動自在である。
【0055】
このため、その物体検出範囲OSAを所望により偏向することができる。特に、第一支持ユニット250が円筒状に形成されているので、これを天井面に水平方向に回動自在に装着することもできる。この場合、第二支持ユニット260を全周方向に可動自在とすることができるので、様々な検出に対応することができる。
【0056】
なお、上記形態では、センサ支持機構120が一個の測位センサ素子110を中心に六個の測位センサ素子110を正六角形状に支持している物体測位装置100を例示した。
【0057】
しかし、三個の測位センサ素子110をセンサ支持機構が正三角形状に放射状に支持している物体測位装置(図示せず)なども実施可能である。この場合も、センサ支持機構は、略60°などの円錐状に物体検出範囲OSAを発生する複数の測位センサ素子110を、軸心の内角が略45°となる配置で放射状に支持することで、物体検出範囲OSAが相互に隙間なく略最小限にオーバーラップする配置とすることができる。
【0058】
しかも、このような物体測位装置では、三個の測位センサ素子110により形成される疑似的な一つの物体検出範囲OSAが正三角形状になるので、複数の物体測位装置の物体検出範囲OSAで壁面を過不足なく充填することができる。
【0059】
なお、当然ながら、上述した実施の形態および複数の変形例は、その内容が相反しない範囲で組み合わせることができる。また、上述した実施の形態および変形例では、各部の構造などを具体的に説明したが、その構造などは本願発明を満足する範囲で各種に変更することができる。
【図面の簡単な説明】
【0060】
【図1】本発明の実施の形態の物体測位装置の外観を示す底面図である。
【図2】物体測位装置の外観を示す正面図である。
【図3】物体測位装置の複数の測位センサ素子の物体検出範囲を示す模式図である。
【図4】物体測位装置の疑似的な一つの物体検出範囲を示す模式的な正面図である。
【図5】一個の測位センサ素子の物体検出範囲を示す模式的な斜視図である。
【図6】二個の測位センサ素子の物体検出範囲を示す模式的な斜視図である。
【図7】七つの物体検出範囲を示す模式的な平面図である。
【図8】二つの物体検出範囲を示す模式的な斜視図である。
【図9】傾斜した物体検出範囲を示す模式的な斜視図である。
【図10】二つの物体検出範囲を示す模式的な斜視図である。
【図11】三つの物体検出範囲を示す模式的な斜視図である。
【図12】一の変形例の物体測位装置の外観を示す斜視図である。
【図13】物体測位装置の外観を示す底面図および平面図である。
【図14】物体測位装置の外観を示す正面図および側面図である。
【図15】物体測位装置の内部構造を示す縦断正面図である。
【図16】他の変形例の物体測位装置の外観を示す斜視図である。
【図17】物体測位装置の外観を示す底面図および平面図である。
【図18】物体測位装置の外観を示す正面図および側面図である。
【図19】物体測位装置の内部構造を示す縦断正面図である。
【図20】さらに他の変形例の物体測位装置の外観を示す斜視図である。
【図21】物体測位装置の外観を示す底面図および平面図である。
【図22】物体測位装置の外観を示す正面図および側面図である。
【図23】物体測位装置の内部構造を示す縦断正面図である。
【図24】物体測位装置が可動した状態を示す模式的な縦断正面図である。
【符号の説明】
【0061】
100 物体測位装置
110 測位センサ素子
120 センサ支持機構
121 支持ベース部
122 センサ支持部
200 物体測位装置
210 素子支持部材
211 支持ベース部
212 センサ支持部
213 ベース本体部
220 物体測位装置
230 素子支持部材
231 支持ベース部
232 凹部
240 物体測位装置
241 素子支持部材
250 第一支持ユニット
251 支持ベース部
252 貫通孔
253 円筒状部
260 第二支持ユニット
OSA 物体検出範囲
【技術分野】
【0001】
本発明は、物体検出範囲を移動する物体を測位する物体測位装置に関し、特に、自身の軸心を中心とした所定内角の円錐状に物体検出範囲を発生する測位センサ素子を利用した物体測位装置に関する。
【背景技術】
【0002】
現在、セキュリティや人員の動線検出などのため、物体検出範囲を移動する物体を測位する物体測位装置が利用されている。このような物体測位装置は、例えば、自身の軸心を中心とした所定内角の円錐状に物体検出範囲を発生する測位センサ素子からなる。
【0003】
より具体的には、このような測位センサ素子は、例えば、物体検出範囲の内角が70°ほどであり、有効な物体検出範囲は60°ほどとなる。物体測位装置は、このような測位センサ素子を軸心が鉛直方向となるようにセンサ支持機構で支持した構造からなる。
【0004】
このような物体測位装置を、例えば、特定の物体検出空間の天井面に配列することで、その物体検出空間の人員の移動などを検出できる。その場合、物体検出空間を自由に移動する人員を確実に検出するためには、多数の物体測位装置を、物体検出範囲が相互に隙間なく略最小限にオーバーラップするように配列する必要がある。
【0005】
当然ながら、必要な物体測位装置の個数は、上述した物体検出範囲の内角の他、物体検出空間の面積および形状、天井面から検出位置までの上下間隔、などに依存する。本発明者が、ある物体検出空間に物体測位装置を必要最小限に設置したところ、198個が必要であった。
【0006】
現在、上述のような物体測位装置として各種の提案がある(例えば、特許文献1参照)。
【特許文献1】特開2002−311125号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかし、上述のように物体検出空間の天井面に多数の物体測位装置を配列することは、施工の作業性や美観の観点から好適とはいえない。特に、一般的に天井面には、照明器具、空調機器、防災設備、スピーカユニット、等が設置されていることがある。このような場合、上述のように多数の物体測位装置を必要な位置に過不足なく配列することが困難なことがある。
【0008】
本発明は上述のような課題に鑑みてなされたものであり、特定の物体検出空間の天井面に過不足なく物体測位装置を配列するような場合でも、その個数を大幅に削減することができる物体測位装置を提供するものである。
【課題を解決するための手段】
【0009】
本発明の物体測位装置は、物体検出範囲を移動する物体を測位する物体測位装置であって、自身の軸心を中心とした所定内角の円錐状に物体検出範囲を発生する複数の測位センサ素子と、物体検出範囲が相互に隙間なく略最小限にオーバーラップする配置に複数の測位センサ素子を特定内角で放射状に支持しているセンサ支持機構と、を有する。
【0010】
従って、本発明の物体測位装置では、複数の測位センサ素子が自身の軸心を中心とした所定内角の円錐状に物体検出範囲を発生する。このような複数の測位センサ素子を、物体検出範囲が相互に隙間なく略最小限にオーバーラップする配置にセンサ支持機構が特定内角で放射状に支持している。このため、複数の測位センサ素子の円錐状の物体検出範囲が疑似的に一つの物体検出範囲として機能する。
【0011】
また、上述のような物体測位装置において、測位センサ素子は、円錐状の物体検出範囲の有効な内角がA°であり、センサ支持機構は、複数の測位センサ素子を軸心の内角が(3A/4)°となる配置で放射状に支持していてもよい。
【0012】
また、上述のような物体測位装置において、測位センサ素子は、円錐状の物体検出範囲の有効な内角が略60°であり、センサ支持機構は、複数の測位センサ素子を軸心の内角が略45°となる配置で放射状に支持していてもよい。
【0013】
また、上述のような物体測位装置において、測位センサ素子は、七個あり、センサ支持機構は、一個の測位センサ素子を中心に六個の測位センサ素子を正六角形状に支持していてもよい。
【0014】
なお、本発明の各種の構成要素は、必ずしも個々に独立した存在である必要はなく、複数の構成要素が一個の部材として形成されていること、一つの構成要素が複数の部材で形成されていること、ある構成要素が他の構成要素の一部であること、ある構成要素の一部と他の構成要素の一部とが重複していること、等でもよい。
【発明の効果】
【0015】
本発明の物体測位装置では、複数の測位センサ素子が自身の軸心を中心とした所定内角の円錐状に物体検出範囲を発生する。このような複数の測位センサ素子を、物体検出範囲が相互に隙間なく略最小限にオーバーラップする配置にセンサ支持機構が特定内角で放射状に支持している。このため、複数の測位センサ素子の円錐状の物体検出範囲が疑似的に一つの物体検出範囲として機能する。従って、測位センサ素子が一個しかない従来装置に比較して物体検出範囲の内角を大幅に拡開することができる。このため、特定の物体検出空間の天井面に過不足なく物体測位装置を配列するような場合でも、その個数を大幅に削減することができる。
【発明を実施するための最良の形態】
【0016】
本発明の実施の一形態を図面を参照して以下に説明する。なお、本実施の形態では図示するように上下方向を規定して説明する。しかし、これは構成要素の相対関係を簡単に説明するために便宜的に規定するものである。従って、本発明を実施する製品の製造時や使用時の方向を限定するものではない。
【0017】
本実施の形態の物体測位装置100は、物体検出範囲を移動する物体を測位する。のため、物体測位装置100は、図1および図2に示すように、自身の軸心を中心とした所定内角の円錐状に物体検出範囲OSAを発生する複数の測位センサ素子110と、物体検出範囲OSAが相互に隙間なく略最小限にオーバーラップする配置に複数の測位センサ素子110を特定内角で放射状に支持しているセンサ支持機構120と、を有する。
【0018】
より具体的には、本実施の形態の物体測位装置100では、測位センサ素子110は、七個あり、センサ支持機構120は、一個の測位センサ素子110を中心に六個の測位センサ素子110を正六角形状に支持している。
【0019】
測位センサ素子110は、円錐状の物体検出範囲OSAの有効な内角が略60°であり、センサ支持機構120は、複数の測位センサ素子110を軸心の内角が略45°となる配置で放射状に支持している。
【0020】
このため、測位センサ素子110の物体検出範囲OSAの有効な内角をA°とすると、センサ支持機構120は複数の測位センサ素子110を軸心の内角が(3A/4)°となる配置で放射状に支持していることになる。
【0021】
なお、センサ支持機構120は、図示するように、円盤状の支持ベース部121を有しており、この支持ベース部121の下面中央から下方にセンサ支持部122が突出している。
【0022】
このセンサ支持部122は、下端が水平に形成されており、その周囲は六角錐状に形成されている。その六面は支持ベース部121の鉛直な軸心から45°に傾斜しており、このように傾斜した六面と中央の水平な下面の各々に、七個の測位センサ素子110が一個ずつ配置されている。
【0023】
上述のような構成において、本実施の形態の物体測位装置100では、図3に示すように、複数の測位センサ素子110が自身の軸心を中心とした60°などの所定内角の円錐状に物体検出範囲OSAを発生する。
【0024】
このような複数の測位センサ素子110を、物体検出範囲OSAが相互に隙間なく略最小限にオーバーラップする配置に、センサ支持機構120が45°などの特定内角で放射状に支持している。
【0025】
このため、本実施の形態の物体測位装置100では、図4に示すように、複数の測位センサ素子110の円錐状の物体検出範囲OSAが疑似的に一つの物体検出範囲OSA′として機能する。
【0026】
従って、測位センサ素子110が一個しかない従来装置(図示せず)に比較して物体検出範囲OSA′の内角を150°などと大幅に拡開することができる。このため、特定の物体検出空間の天井面に過不足なく物体測位装置100を配列するような場合でも、その個数を大幅に削減することができる。
【0027】
なお、前述のように、本発明者が、ある物体検出空間(図示せず)に従来の物体測位装置を必要最小限に設置したところ198個が必要であった。しかし、本実施の形態の物体測位装置を必要最小限に設置したところ、必要な個数は22個であった。従って、その施工の作業性を大幅に向上させることができ、天井面の美観も向上させることができる。
【0028】
なお、本実施の形態の物体測位装置100は、上述のように複数の測位センサ素子110が実装されているので、その検出信号の処理アルゴリズムも従来とは相違することになる。
【0029】
例えば、実装されている七個の測位センサ素子110が一個でも移動する物体を検出したときは、これを物体測位装置100の検出結果として採用する。一方、七個の測位センサ素子110が一個でもノイズを検出したときは、七個の測位センサ素子110の全部の検出結果をキャンセルする、のような信号処理が可能である。
【0030】
特に、本実施の形態の物体測位装置100では、測位センサ素子110は、円錐状の物体検出範囲OSAの有効な内角が略60°であり、センサ支持機構120は、複数の測位センサ素子110を軸心の内角が略45°となる配置で放射状に支持している。
【0031】
そして、センサ支持機構120は、一個の測位センサ素子110を中心に六個の測位センサ素子110を正六角形状に支持している。このため、有効な内角が略60°の測位センサ素子110を略最良の効率で利用することができる。
【0032】
ここで、上述のことを以下に順番に説明する。まず、測位センサ素子110の受信可能な角度は、現実には全角で70°程度であるが、測位センサ素子110の個体差等を考慮し、[1]では安全率をとり全角で60°とし、考察してゆく。
【0033】
[1]中央のセンサと周囲六個のセンサの角度説明(現状なぜ45°になっているのか)。
【0034】
内側に隙間が無いように配置を考える。測位センサ素子110一個一個の受信可能な範囲を円錐形で表現すると、図5のようになる。円錐形は適切に配置しないと隙間、つまり受信不可能な範囲が現れる。
【0035】
隙間を無くすために、円錐状の物体検出範囲OSAがオーバーラップするように測位センサ素子110の配置を決めてゆく。まず、直下に対してどの位置でも受信可能になるような測位センサ素子110の配置を検討する。
【0036】
図6に示すように、二つの円錐状の物体検出範囲OSAがオーバーラップしつつ、垂線同士が角度αほど傾いている状態について考える。まず、単純なモデルとして、図7に示すように、同じ直径の円を、中心に一つ配し、その円周上に、それぞれの円が接する状態、すなわち、真下を向いた一個の測位センサ素子110に対し、六個の測位センサ素子110を六等配の角度(=60°)で配置する場合で検討を開始した。
【0037】
このとき、傾いている側、つまり円周上に並べたの測位センサ素子110の受信可能な範囲を円で近似すると上図のαは以下の式の通りとなる。外周の測位センサ素子110の有効範囲を円形とすると以下のようになる。
【0038】
[数1]
x=2*(COS(30°)*r1)
=2*(COS(30°)*(H*TAN(30°)))
=2*H*SIN(30°)
=1H
[数2]
α=ArcTan(X/H)
=45°
【0039】
つまり、測位センサ素子110の物体検出範囲OSAを円錐形とし、中心に一個、外周に60°づつ六個の合計七個を配置したとき、以上の計算より、真下を向いた中央の素子から45°の角度をつけて、外周の六個の素子を配置したとき、直下に対して受信不可の範囲が無くなる事がわかった。
【0040】
このとき、図8に示すように、物体測位装置100の全体としての受信可能な角度は、半角で75°、全角だと150度である。
【0041】
[2]外周六個の測位センサ素子110の個数の説明(現状なぜ円周を六等分にしているのか)つぎに、外周の測位センサ素子110同士の関係について考察する。
【0042】
前述の[1]に於いて、真下に一個、外周に六個の合計七個を配置することが効率がよいと分かったが、外周の六個の測位センサ素子110同士が上手く機能しているか考察する。
【0043】
測位センサ素子110の取付け角が45°、測定可能な範囲が全角で70°のとき、高さHの床に描かれる楕円は、図9および図10に示すように、半減全角が70°なので、楕円の公式により、以下のようになる。
【0044】
[数3]
(x/a)^2+(y/b)^2=1
a=2.747477 H :(H*tan(中心+(全角/2)-H*tan(中心-(全角/2)))/2
0.990243 H :(H/cos(中心))*tan((全角/2))
1.923804 H :((H*tan(中心+(全角/2))+H*tan(中心-(全角/2)))/2)
-H*tan(中心)
b=1.649376 H
【0045】
ここで、計算のために中央部の影響は小さいとし、周囲に配置する測位センサ素子110の数だけ楕円を原点から放射状に配置する。そして、図11に示すように、上で求めた楕円をいくつ並べたときにrがどのように変化するかを検証した。
【0046】
【表1】
【表2】
【0047】
結果として、六個までは測位センサ素子110を円周上に並べたとき、劇的に受信可能な範囲が広がるが、七個以上すると受信可能な範囲は広がるが、製造コストを考慮すると、六個とするのが妥当だと考える。以上の理由により、測位センサ素子110の配置を決定した。
【0048】
なお、本発明は本実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で各種の変形を許容する。例えば、上記形態では説明を簡単とするため、試作品の簡単な意匠の物体測位装置100を例示した。
【0049】
しかし、このような物体測位装置は各種にデザインすることができる。例えば、図12ないし図15に例示する物体測位装置200は、円盤状の支持ベース部211の下面に円滑な半円球状にセンサ支持部212が突出しており、その外面に七個の測位センサ素子110が配列されている。支持ベース部211の上面には円筒状のベース本体部213が形成されており、これで素子支持部材210が形成されている。
【0050】
この物体測位装置200では、センサ支持部212の突出が必要最小限であるとともに、その外形が円滑である。このため、天井面に物体測位装置200を施工したときに目立たず、天井面の美観を損なうことを抑制できる。
【0051】
また、図16ないし図19に例示する物体測位装置220では、素子支持部材230の肉厚のある円盤状の支持ベース部231の下面に放射状に六つの凹部232が形成されており、その凹部232に測位センサ素子110が配列されている。この物体測位装置220では、さらに下面の突出を低減することができるので、さらに天井面の美観の向上を期待することができる。
【0052】
さらに、図20ないし図24に例示する物体測位装置240では、素子支持部材241が、第一支持ユニット250と第二支持ユニット260からなる。第一支持ユニット250は、円筒状のベース本体部213と円盤状の支持ベース部251からなる。
【0053】
ただし、この支持ベース部251には貫通孔が形成されており、そこに第二支持ユニット260が揺動自在に軸支されている。この第二支持ユニット260は、下半部が支持ベース部251の貫通孔から下方に突出しており、そこに七個の測位センサ素子110が搭載されている。
【0054】
一方、支持ベース部251は、貫通孔に連通する円筒状部253が上方に形成されており、そこに第二支持ユニット260の上部が軸支されている。この物体測位装置240では、第二支持ユニット260が前後方向(左右方向)に揺動自在である。
【0055】
このため、その物体検出範囲OSAを所望により偏向することができる。特に、第一支持ユニット250が円筒状に形成されているので、これを天井面に水平方向に回動自在に装着することもできる。この場合、第二支持ユニット260を全周方向に可動自在とすることができるので、様々な検出に対応することができる。
【0056】
なお、上記形態では、センサ支持機構120が一個の測位センサ素子110を中心に六個の測位センサ素子110を正六角形状に支持している物体測位装置100を例示した。
【0057】
しかし、三個の測位センサ素子110をセンサ支持機構が正三角形状に放射状に支持している物体測位装置(図示せず)なども実施可能である。この場合も、センサ支持機構は、略60°などの円錐状に物体検出範囲OSAを発生する複数の測位センサ素子110を、軸心の内角が略45°となる配置で放射状に支持することで、物体検出範囲OSAが相互に隙間なく略最小限にオーバーラップする配置とすることができる。
【0058】
しかも、このような物体測位装置では、三個の測位センサ素子110により形成される疑似的な一つの物体検出範囲OSAが正三角形状になるので、複数の物体測位装置の物体検出範囲OSAで壁面を過不足なく充填することができる。
【0059】
なお、当然ながら、上述した実施の形態および複数の変形例は、その内容が相反しない範囲で組み合わせることができる。また、上述した実施の形態および変形例では、各部の構造などを具体的に説明したが、その構造などは本願発明を満足する範囲で各種に変更することができる。
【図面の簡単な説明】
【0060】
【図1】本発明の実施の形態の物体測位装置の外観を示す底面図である。
【図2】物体測位装置の外観を示す正面図である。
【図3】物体測位装置の複数の測位センサ素子の物体検出範囲を示す模式図である。
【図4】物体測位装置の疑似的な一つの物体検出範囲を示す模式的な正面図である。
【図5】一個の測位センサ素子の物体検出範囲を示す模式的な斜視図である。
【図6】二個の測位センサ素子の物体検出範囲を示す模式的な斜視図である。
【図7】七つの物体検出範囲を示す模式的な平面図である。
【図8】二つの物体検出範囲を示す模式的な斜視図である。
【図9】傾斜した物体検出範囲を示す模式的な斜視図である。
【図10】二つの物体検出範囲を示す模式的な斜視図である。
【図11】三つの物体検出範囲を示す模式的な斜視図である。
【図12】一の変形例の物体測位装置の外観を示す斜視図である。
【図13】物体測位装置の外観を示す底面図および平面図である。
【図14】物体測位装置の外観を示す正面図および側面図である。
【図15】物体測位装置の内部構造を示す縦断正面図である。
【図16】他の変形例の物体測位装置の外観を示す斜視図である。
【図17】物体測位装置の外観を示す底面図および平面図である。
【図18】物体測位装置の外観を示す正面図および側面図である。
【図19】物体測位装置の内部構造を示す縦断正面図である。
【図20】さらに他の変形例の物体測位装置の外観を示す斜視図である。
【図21】物体測位装置の外観を示す底面図および平面図である。
【図22】物体測位装置の外観を示す正面図および側面図である。
【図23】物体測位装置の内部構造を示す縦断正面図である。
【図24】物体測位装置が可動した状態を示す模式的な縦断正面図である。
【符号の説明】
【0061】
100 物体測位装置
110 測位センサ素子
120 センサ支持機構
121 支持ベース部
122 センサ支持部
200 物体測位装置
210 素子支持部材
211 支持ベース部
212 センサ支持部
213 ベース本体部
220 物体測位装置
230 素子支持部材
231 支持ベース部
232 凹部
240 物体測位装置
241 素子支持部材
250 第一支持ユニット
251 支持ベース部
252 貫通孔
253 円筒状部
260 第二支持ユニット
OSA 物体検出範囲
【特許請求の範囲】
【請求項1】
物体検出範囲を移動する物体を測位する物体測位装置であって、
自身の軸心を中心とした所定内角の円錐状に前記物体検出範囲を発生する複数の測位センサ素子と、
前記物体検出範囲が相互に隙間なく略最小限にオーバーラップする配置に複数の前記測位センサ素子を特定内角で放射状に支持しているセンサ支持機構と、
を有する物体測位装置。
【請求項2】
前記測位センサ素子は、円錐状の前記物体検出範囲の有効な内角がA°であり、
前記センサ支持機構は、複数の前記測位センサ素子を前記軸心の内角が(3A/4)°となる配置で放射状に支持している請求項1に記載の物体測位装置。
【請求項3】
前記測位センサ素子は、円錐状の前記物体検出範囲の有効な内角が略60°であり、
前記センサ支持機構は、複数の前記測位センサ素子を前記軸心の内角が略45°となる配置で放射状に支持している請求項1に記載の物体測位装置。
【請求項4】
前記測位センサ素子は、七個あり、
前記センサ支持機構は、一個の前記測位センサ素子を中心に六個の前記測位センサ素子を正六角形状に支持している請求項1ないし3の何れか一項に記載の物体測位装置。
【請求項1】
物体検出範囲を移動する物体を測位する物体測位装置であって、
自身の軸心を中心とした所定内角の円錐状に前記物体検出範囲を発生する複数の測位センサ素子と、
前記物体検出範囲が相互に隙間なく略最小限にオーバーラップする配置に複数の前記測位センサ素子を特定内角で放射状に支持しているセンサ支持機構と、
を有する物体測位装置。
【請求項2】
前記測位センサ素子は、円錐状の前記物体検出範囲の有効な内角がA°であり、
前記センサ支持機構は、複数の前記測位センサ素子を前記軸心の内角が(3A/4)°となる配置で放射状に支持している請求項1に記載の物体測位装置。
【請求項3】
前記測位センサ素子は、円錐状の前記物体検出範囲の有効な内角が略60°であり、
前記センサ支持機構は、複数の前記測位センサ素子を前記軸心の内角が略45°となる配置で放射状に支持している請求項1に記載の物体測位装置。
【請求項4】
前記測位センサ素子は、七個あり、
前記センサ支持機構は、一個の前記測位センサ素子を中心に六個の前記測位センサ素子を正六角形状に支持している請求項1ないし3の何れか一項に記載の物体測位装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2010−60508(P2010−60508A)
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願番号】特願2008−228698(P2008−228698)
【出願日】平成20年9月5日(2008.9.5)
【出願人】(000165974)古河機械金属株式会社 (211)
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願日】平成20年9月5日(2008.9.5)
【出願人】(000165974)古河機械金属株式会社 (211)
[ Back to top ]