
物体移動装置
【課題】構造を複雑化させることなく、リーダ台車並びにフォロワ台車の台車本体の幅方向中心位置で物体をリフトアップしてバランス良く支持し得る物体移動装置を提供する。
【解決手段】一対のリフトバー27を車両4の接地ポイントとしての車輪4aの両側から互いに近接させる際、一方のリフトバー27が他方のリフトバー27より先に車輪4aに接触した場合、該一方のリフトバー27が車輪4aから受ける力に基づき、該力の作用する方向へ台車本体2を移動させつつ前記一対のリフトバー27を互いに近接させ、前記他方のリフトバー27が車輪4aに接触した時点で前記台車本体2を停止させるよう構成してある。
【解決手段】一対のリフトバー27を車両4の接地ポイントとしての車輪4aの両側から互いに近接させる際、一方のリフトバー27が他方のリフトバー27より先に車輪4aに接触した場合、該一方のリフトバー27が車輪4aから受ける力に基づき、該力の作用する方向へ台車本体2を移動させつつ前記一対のリフトバー27を互いに近接させ、前記他方のリフトバー27が車輪4aに接触した時点で前記台車本体2を停止させるよう構成してある。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体移動装置に関するものである。
【背景技術】
【0002】
従来、任意の位置に停車した車両を駐車施設における所定位置に搬送できるようにした入出車装置の一般的技術水準を示すものとしては、例えば、特許文献1がある。
【0003】
特許文献1に示される装置は、それぞれ車両支持機構及び走行機構を備える左側搬送台車と右側搬送台車とからなり、該左側搬送台車と右側搬送台車とがそれぞれ独立して移動しつつ、協働して車両を支持し、搬送するようになっている。
【0004】
前記左側搬送台車と右側搬送台車は、無線通信によってリアルタイムに情報交換を行うことにより、協働している。
【0005】
しかしながら、前述の如く、無線通信による台車相互間でのリアルタイムの情報交換に基づいて前記左側搬送台車と右側搬送台車とを協働させるのでは、通信障害で情報が途切れたり遅れたりすることもあり、前記左側搬送台車と右側搬送台車とを協働させるために必要な情報をリアルタイムに安定して得ることが難しかった。又、情報が安定して得られなかった場合、搬送される車両等の物体に必要以上の内力が加わることとなり、最悪の場合、物体を落としたり、傷つけたりする可能性があった。
【0006】
このため、本発明者等は、無線通信のみによる台車相互間でのリアルタイムの情報交換を行うようにした協働搬送とは異なり、車両等の物体を落としたり、傷つけたりする心配がなく、複数の台車を協調制御により作動させることで、車両等の物体を確実に且つより安定して移動させ得る物体移動装置を提案している。(例えば、特許文献2参照。)
【0007】
前記特許文献2に開示した物体移動装置は、複数の台車を協調制御により作動させるという非常に高度で優れた機能を有するものである反面、移動すべき物体がバス等のホイールベースの長い車両や接地ポイントとしての車輪の数が多い車両であった場合、移動装置自体を大きくしたり、車輪の数に合わせた機構のものを別途用意しなければならず、移動装置の種類が増える一方、移動装置が大型化した場合には、移動経路を広くとり、且つ保管スペースも広く必要になるという欠点を有していた。
【0008】
そこで、本発明者等は、車両等の物体の一つの接地ポイントとしての車輪をリフトアップし、与えられた目標軌道に沿って移動可能なリーダ台車と、該リーダ台車にてリフトアップされる車輪以外の一つの車輪をリフトアップする複数台のフォロワ台車とを備えることにより、大きさや接地ポイント数の異なる車両等の物体にも装置の種類を増やすことなく対応し得、車両等の物体を確実に且つより安定して移動させることができ、移動経路や保管スペースの削減をも図り得る物体移動装置を提案している。(例えば、特許文献3参照。)
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2004−169451号公報
【特許文献2】特開2009−108542号公報
【特許文献3】特開2009−286570号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
ところで、前記特許文献3に開示した物体移動装置においては、リフターの車輪浮上支持装置における一対のリフトバーを車両の各車輪の前後に配置して互いに近接させることにより、該車両をリフトアップするよう構成してある。
【0011】
ここで、前記リフトバーを開閉させるためのリフトバー開閉アクチュエータは駆動ユニット用ガイドレールに沿ってスライド自在に配設してあるため、仮に、前記リフトバーの近接動作において、先に車両前後方向前側のリフトバーが車輪に接触した場合、後側のリフトバーが前側へ移行していく一方、逆に、先に車両前後方向後側のリフトバーが車輪に接触した場合、前側のリフトバーが後側へ移行していく形となり、車両の車輪に対するリーダ台車並びに各フォロワ台車の停止位置が該車輪の前後方向へ多少ずれていたとしてもそれに影響されずに、前記リフトバー開閉アクチュエータが必ず車輪の前後方向中心部に位置して自動調芯されることとなる。
【0012】
しかしながら、前述の如く、車両の車輪に対するリーダ台車並びに各フォロワ台車の停止位置が該車輪の前後方向へ大きくずれていた場合、リーダ台車並びに各フォロワ台車の台車本体の幅方向中心から大きくずれる位置で車両の車輪をリフトアップして支持する形となるため、バランスが悪く、改善の余地が残されていた。
【0013】
又、前記リフトバー開閉アクチュエータは、駆動ユニット用ガイドレールに沿ってスライド自在に配設すると共に、該リフトバー開閉アクチュエータを駆動ユニット用ガイドレール上の所望位置に保持するための自動調芯位置保持用固定装置を配設する必要があり、構造が複雑化するという問題も有していた。
【0014】
本発明は、斯かる実情に鑑み、構造を複雑化させることなく、リーダ台車並びにフォロワ台車の台車本体の幅方向中心位置で物体をリフトアップしてバランス良く支持し得る物体移動装置を提供しようとするものである。
【課題を解決するための手段】
【0015】
本発明は、走行駆動装置により全方向に自走可能な台車本体と、該台車本体に連結機構を介して取り付けられ且つ一対のリフトバーを接地ポイントが複数存在する物体の一つの接地ポイントの両側に配置して互いに近接させることにより、該物体の一つの接地ポイントをリフトアップするリフターとを有し、与えられた目標軌道に沿って移動可能なリーダ台車と、
走行駆動装置により全方向に自走可能な台車本体と、該台車本体に連結機構を介して取り付けられ且つ一対のリフトバーを前記物体の前記リーダ台車にてリフトアップされる接地ポイント以外の一つの接地ポイントの両側に配置して互いに近接させることにより、該物体の一つの接地ポイントをリフトアップするリフターとを有し、前記リーダ台車の動きを推定しつつ追従することにより、該リーダ台車と協調して物体を移動させるフォロワ台車とを備えた物体移動装置において、
前記一対のリフトバーを接地ポイントの両側から互いに近接させる際、一方のリフトバーが他方のリフトバーより先に接地ポイントに接触した場合、該一方のリフトバーが接地ポイントから受ける力に基づき、該力の作用する方向へ台車本体を移動させつつ前記一対のリフトバーを互いに近接させ、前記他方のリフトバーが接地ポイントに接触した時点で前記台車本体を停止させるよう構成したことを特徴とする物体移動装置にかかるものである。
【0016】
上記手段によれば、以下のような作用が得られる。
【0017】
一対のリフトバーを物体の接地ポイントの両側に配置した際、一方のリフトバーが接地ポイントに近い状態となっていた場合、リフトバーを互いに近接させていくと、一方のリフトバーが他方のリフトバーより先に接地ポイントに接触するが、一方のリフトバーが接地ポイントから受ける力に基づき、該力の作用する方向へ台車本体が移動しつつ前記一対のリフトバーが互いに近接し、他方のリフトバーが接地ポイントに接触すると、前記台車本体は停止し、前記一対のリフトバーが更に近接していき、接地ポイントが完全に浮いた状態となる。
【0018】
この結果、前記接地ポイントの持ち上げ開始時にリフトバー間の中心位置と接地ポイントの中心位置とが一致していない場合でも、二本のリフトバー間の中心位置で接地ポイントを持ち上げることが可能となるため、バランスが良くなる一方、前記リフトバーを開閉するためのアクチュエータは、駆動ユニット用ガイドレールに沿ってスライド自在に配設しなくて済むと共に、該リフトバーを開閉するためのアクチュエータを駆動ユニット用ガイドレール上の所望位置に保持するための自動調芯位置保持用固定装置を配設する必要もなくなり、構造が複雑化することを回避可能となる。
【発明の効果】
【0019】
本発明の物体移動装置によれば、構造を複雑化させることなく、リーダ台車並びにフォロワ台車の台車本体の幅方向中心位置で物体をリフトアップしてバランス良く支持し得るという優れた効果を奏し得る。
【図面の簡単な説明】
【0020】
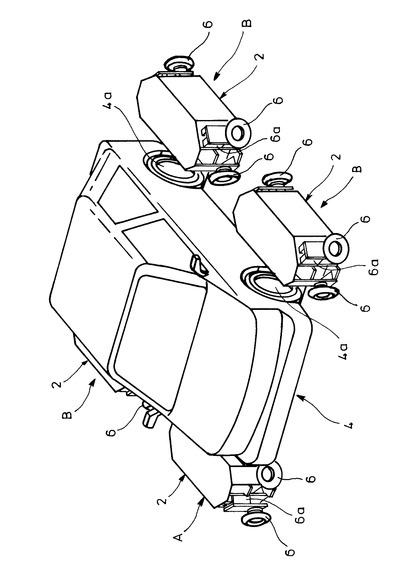
【図1】本発明の物体移動装置の実施例を示す全体概要斜視図である。
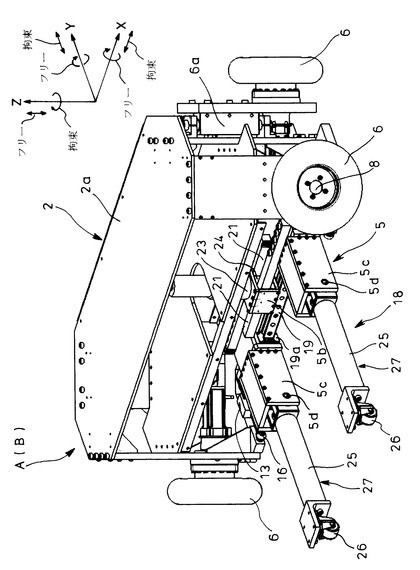
【図2】本発明の物体移動装置の実施例におけるリーダ台車(フォロワ台車)を示す斜視図である。
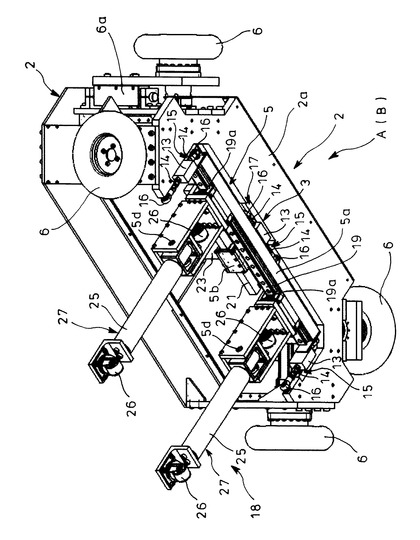
【図3】本発明の物体移動装置の実施例におけるリーダ台車(フォロワ台車)を底面側から示す斜視図である。
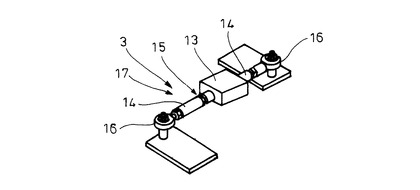
【図4】本発明の物体移動装置の実施例におけるリーダ台車(フォロワ台車)の連結機構を示す斜視図である。
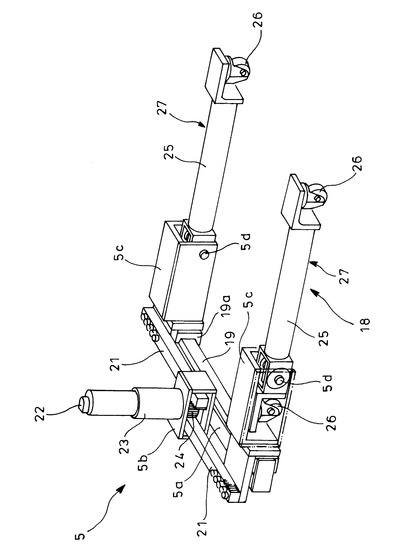
【図5】本発明の物体移動装置の実施例におけるリーダ台車(フォロワ台車)のリフターの車輪浮上支持装置を示す斜視図である。
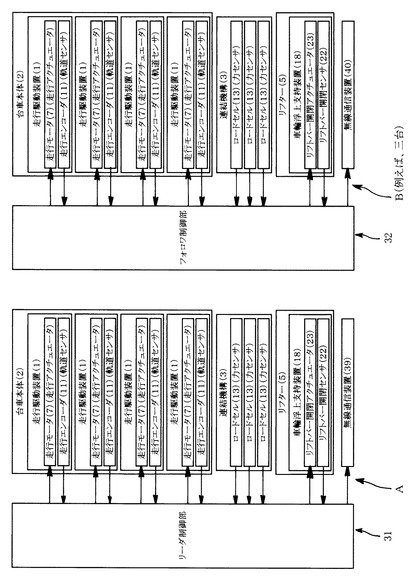
【図6】本発明の物体移動装置の実施例におけるリーダ台車の全体制御系統並びにフォロワ台車の全体制御系統を示すブロック図である。
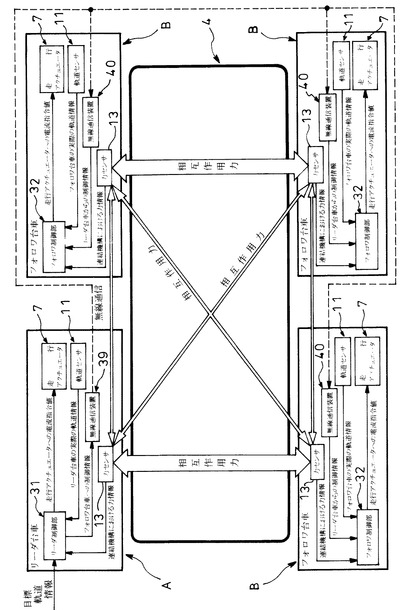
【図7】本発明の物体移動装置の実施例におけるリーダ台車と各フォロワ台車の協調制御に関するシステム図である。
【図8】本発明の物体移動装置の実施例における一台のフォロワ台車に対する仮想リーダ台車のイメージ図である。
【図9】本発明の物体移動装置の実施例におけるリフターに加わる力ベクトルを演算する際の座標系を示す平面図である。
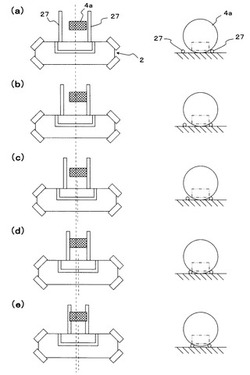
【図10】本発明の物体移動装置の実施例におけるリーダ台車及びフォロワ台車のリフターの車輪浮上支持装置を示す作動状態説明図であって、(a)は一対のリフトバーを車輪の両側に配置した際、一方のリフトバーが車輪に近い状態を示す図、(b)は一方のリフトバーが他方のリフトバーより先に車輪に接触した状態を示す図、(c)は一方のリフトバーが車輪から受ける力に基づき、該力の作用する方向へ台車本体を移動させつつ前記一対のリフトバーを互いに近接させる状態を示す図、(d)は他方のリフトバーが車輪に接触した状態を示す図、(e)はリフトバーが閉じて車輪が浮いた状態を示す図である。
【発明を実施するための形態】
【0021】
以下、本発明の実施の形態を添付図面を参照して説明する。
【0022】
図1〜図10は本発明の物体移動装置の実施例であって、該物体移動装置は、
走行駆動装置1により全方向に自走可能な台車本体2と、該台車本体2に連結機構3を介して取り付けられ且つ物体としての車両4の一つの車輪4a(接地ポイント)をリフトアップするリフター5とを有し、与えられた目標軌道に沿って移動可能なリーダ台車Aと、
走行駆動装置1により全方向に自走可能な台車本体2と、該台車本体2に連結機構3を介して取り付けられ且つ前記車両4の前記リーダ台車Aにてリフトアップされる車輪4a以外の一つの車輪4a(接地ポイント)をリフトアップするリフター5とを有した複数台(図の例では三台)のフォロワ台車Bとを備え、
前記各フォロワ台車Bが前記リーダ台車A及び自分以外のフォロワ台車Bをまとめたものを一台の仮想リーダ台車A´(図8参照)と想定し、該仮想リーダ台車A´の動きを推定しつつ追従することにより、前記リーダ台車Aと複数台のフォロワ台車Bとが協調して車両4を移動させるよう構成したものである。
【0023】
前記台車本体2は、図1〜図3に示す如く、直方体の四隅部をカットして細長い八角柱形状に組み立てられた台車フレーム2aの四隅部に、走行駆動装置1として走行車輪6を走行モータ7(走行アクチュエータ)(図6参照)の作動により水平な車軸8を中心に回転可能に配設してなる構成を有している。尚、前記走行車輪6は、操舵を必要としないオムニホイール(登録商標)やメカナムホイール等の全方向移動車輪とし、台車本体2の幅方向(図9の左右方向)に対しそれぞれ45°の角度を持ち、且つ対角に位置する走行車輪6同士が平行となるようにしてある。又、前記走行モータ7には、軌道センサとしての走行エンコーダ11(図6参照)が一体に組み込まれ、台車本体2の実際の軌道情報を検出できるようにしてある。更に又、前記走行車輪6の全てが常に地面と接触するよう、四個のうち二個の走行車輪6はサスペンション機構6aを介して台車フレーム2aに取り付けるようにしてある。
【0024】
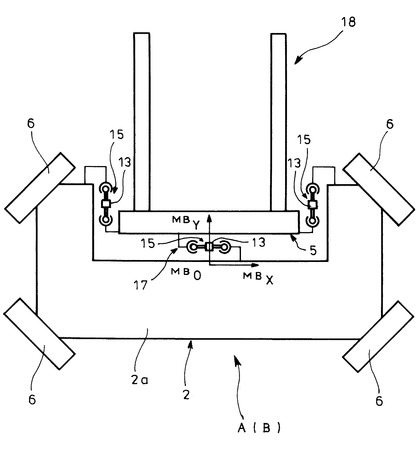
前記連結機構3は、図3及び図4に示す如く、力センサとしての引張圧縮型のロードセル13の両端にロッド14を取り付けた連結部材15を、その一端がユニバーサルジョイント16により台車本体2側に連結され他端がユニバーサルジョイント16によりリフター5側に連結されるよう、同一水平面内に複数(図9の例では三個)配設してなるパラレルリンク機構17によって構成してある。この場合、前記台車本体2に対しリフター5は、図2に示す如く、水平面内におけるX−Y方向に移動する方向の2自由度と、該X−Y方向に対して直交するZ軸を中心として回転する方向の1自由度とを加えた平面3自由度が拘束され、且つX軸を中心として回転する方向の1自由度と、Y軸を中心として回転する方向の1自由度と、Z軸方向に移動する方向の1自由度とを加えた3自由度がフリーとなるよう、前記パラレルリンク機構17(図3、図4及び図9参照)を介して配置される形となる。
【0025】
前記リフター5は、図1〜図3及び図5に示す如く、前記車両4の接地ポイントとしての各車輪4aを支持するための車輪浮上支持装置18を装備し、該車輪浮上支持装置18は、前記台車本体2に対し連結機構3を介して取り付けられるリフターフレーム5aに、リニアガイドレール19を台車本体2の幅方向(図9の左右方向)へ延びるよう固定配置すると共に、該リニアガイドレール19に対し、リニアガイドブロック19aを介して一対のラック部材21を互いにそのラック部の形成面が対向した状態で前記リニアガイドレール19に沿ってスライド自在となるよう配設し、前記リフターフレーム5aの中央部に一体に設けられ両端が開放された中空箱形のベース枠5bに、エンコーダ等のリフトバー開閉センサ22が一体に設けられたモータ等のリフトバー開閉アクチュエータ23を取り付け、該リフトバー開閉アクチュエータ23によって回転駆動される駆動ピニオン24を前記一対のラック部材21の互いに対向するラック部に対し前記ベース枠5b内でその両方に噛合させ、前記リニアガイドブロック19aから、底面が開放された断面門型のカバーフレーム5cを張り出させ、該カバーフレーム5cに対し、外周に車輪支持ローラ25が回転自在に嵌装され且つ先端部と基端部に接地支持輪26が取り付けられたリフトバー27を、前記ラック部材21と直角な水平方向へ延び且つ前記リニアガイドレール19と平行な揺動軸5dを中心に揺動自在となるよう取り付けてなる構成を有し、前記リフター5の車輪浮上支持装置18における一対のリフトバー27を前記車両4の各車輪4aの前後に配置して互いに近接させることにより、該車両4をリフトアップするよう構成してある。尚、前記リフトバー27の両端に取り付けた接地支持輪26により車両4の重量全てを支持するため、台車本体2は、車両4の重量を支持できるよう頑丈に設計する必要がなくなるという利点があり、更に、前記リフトバー27をその開閉方向と平行な揺動軸5dを中心に揺動自在となるようにしているため、二本のリフトバー27に取り付けた四つの接地支持輪26は常に接地する形となり、好ましい。
【0026】
前記リフトバー27の車輪支持ローラ25表面には、ローレット加工、或いは滑り止め塗料の塗装といった滑り止め加工を施すようにしてある。
【0027】
前記接地支持輪26には、一般的なキャスターを用いるようにしてあるが、前記走行車輪6と同様に、操舵を必要としないオムニホイール(登録商標)やメカナムホイール等の全方向移動車輪を用いても良いことは言うまでもない。
【0028】
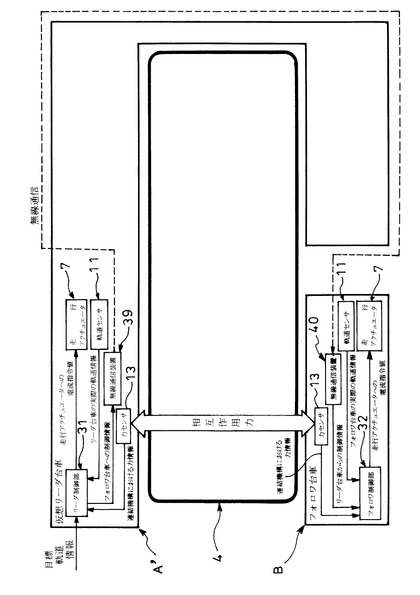
一方、図6はリーダ台車Aの全体制御系統並びにフォロワ台車Bの全体制御系統を示すブロック図であり、前記リーダ台車Aに搭載されたリーダ制御部31には、前記台車本体2の走行駆動装置1における走行アクチュエータとしての走行モータ7と、前記台車本体2の走行駆動装置1における軌道センサとしての走行エンコーダ11と、前記連結機構3の力センサとしてのロードセル13と、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉アクチュエータ23と、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉センサ22と、前記フォロワ台車Bへ制御情報を送信するための無線通信装置39とを接続し、前記連結機構3の力センサとしてのロードセル13による検出信号と、前記台車本体2の走行駆動装置1における軌道センサとしての走行エンコーダ11による検出信号とに基づいて、前記台車本体2の走行駆動装置1における走行アクチュエータとしての走行モータ7に駆動信号を出力すると共に、前記無線通信装置39にてフォロワ台車Bへの制御情報を送信しつつ、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉センサ22による検出信号に基づいて、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉アクチュエータ23に駆動信号を出力する一方、
前記フォロワ台車Bに搭載されたフォロワ制御部32には、前記台車本体2の走行駆動装置1における走行アクチュエータとしての走行モータ7と、前記台車本体2の走行駆動装置1における軌道センサとしての走行エンコーダ11と、前記連結機構3の力センサとしてのロードセル13と、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉アクチュエータ23と、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉センサ22と、前記リーダ台車Aからの制御情報を受信するための無線通信装置40とを接続し、前記連結機構3の力センサとしてのロードセル13による検出信号と、前記台車本体2の走行駆動装置1における軌道センサとしての走行エンコーダ11による検出信号と、前記無線通信装置40で受信したリーダ台車Aからの制御情報とに基づいて、前記台車本体2の走行駆動装置1における走行アクチュエータとしての走行モータ7に駆動信号を出力すると共に、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉センサ22による検出信号に基づいて、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉アクチュエータ23に駆動信号を出力するようにしてある。
【0029】
前記リーダ台車Aと複数台(図の例では三台)のフォロワ台車Bの協調制御に関するシステムについてより詳しくは、図7に示す如く、前記リーダ台車Aと各フォロワ台車Bとの間で車両4を介して相互に働く相互作用力を前記リーダ台車Aの力センサとしてのロードセル13により力情報として検出し、前記リーダ台車Aの台車本体2の実際の軌道情報を前記軌道センサとしての走行エンコーダ11によって検出し、前記リーダ制御部31において、予め入力される目標軌道情報と、前記リーダ台車Aの力センサとしてのロードセル13で検出された力情報と、前記リーダ台車Aの軌道センサとしての走行エンコーダ11で検出された実際の軌道情報とに基づき、前記リーダ台車Aの台車本体2の走行アクチュエータへ電流指令値を出力すると共に、前記無線通信装置39にて各フォロワ台車Bへの制御情報を送信し、前記リーダ台車Aの台車本体2を目標軌道に沿って移動させる一方、
前記リーダ台車Aと各フォロワ台車Bとの間で車両4を介して相互に働く相互作用力を前記各フォロワ台車Bの力センサとしてのロードセル13により力情報として検出し、前記各フォロワ台車Bの台車本体2の実際の軌道情報を前記軌道センサとしての走行エンコーダ11によって検出し、前記リーダ台車Aから無線通信装置39にて送信される制御情報を無線通信装置40で受信し、前記フォロワ制御部32において、前記各フォロワ台車Bの力センサとしてのロードセル13で検出された力情報と、前記各フォロワ台車Bの軌道センサとしての走行エンコーダ11で検出された実際の軌道情報と、前記無線通信装置40で受信したリーダ台車Aからの制御情報とに基づき、前記各フォロワ台車Bの台車本体2の走行アクチュエータへ電流指令値を出力し、前記各フォロワ台車Bの台車本体2を前記リーダ台車Aの動きに追従させて移動させるようにしてある。
【0030】
但し、前記フォロワ台車Bが複数台(図の例では三台)となった場合、図7に示す如く、自分以外の全ての台車からの影響を受けることになるため、i番目のフォロワ台車Bはリーダ台車Aに与えられた目標軌道を推定することができなくなる。そこで、i番目のフォロワ台車Bに対して、第一のグループをi番目のフォロワ台車Bそれ自身とし、第二のグループをリーダ台車A及びi番目以外のフォロワ台車Bをまとめた一台の仮想リーダ台車A´(これをi番目の仮想リーダ台車A´)とする。即ち、i番目の仮想リーダ台車A´は、i番目のフォロワ台車Bから見ると、図8に示す如く、一台のリーダのように振舞うと考えられる。この仮想リーダという考え方を用いれば、フォロワ台車Bが一台の場合の目標軌道の推定方法を用いて、前記i番目のフォロワ台車Bは、リーダ台車A及び自分以外のフォロワ台車Bをまとめた一台のi番目の仮想リーダ台車A´の目標軌道を推定することができる。
【0031】
尚、前記各フォロワ台車Bの台車本体2がリーダ台車Aの動きに追従して移動するための前記ロードセル13で検出された力情報に、例えば、地面と前記リフター5の接地支持輪26との摩擦や慣性力等の外乱要素が影響を与える場合、前記リーダ台車Aの動きに各フォロワ台車Bが追従しようとする動きに対し誤差を増大させてしまうので、より安定した状態で前記リーダ台車Aと各フォロワ台車Bとを協調させて車両4を移動させるには、前述の如き誤差を修正するための制御情報が必要となることから、該制御情報を前記リーダ制御部31より、前記リーダ台車Aの無線通信装置39にて送信し各フォロワ台車Bの無線通信装置40で受信し、フォロワ制御部32で前記誤差を修正する計算を前記制御情報に基づいて行うようにしてある。
【0032】
ここで、前記力センサとしての引張圧縮型のロードセル13が介装された連結部材15を平面3自由度を拘束するパラレルリンク機構17として図9に示すような配置で三つ取り付けた場合、ロードセル13による検出値をヤコビ行列で座標変換すると、外力としてリフター5に加わる力を平面3自由度の力情報として得ることができるが、具体的な計算例については、特許文献3に記載されている。
【0033】
又、リーダ台車Aとフォロワ台車Bの協調制御の基本的な考え方、並びにフォロワ台車Bが複数台となった場合に、仮想リーダという考え方を用いることにより、フォロワ台車Bが一台の場合の目標軌道の推定方法と同様に、i番目のフォロワ台車Bが、リーダ台車A及び自分以外のフォロワ台車Bをまとめた一台のi番目の仮想リーダ台車A´の目標軌道を推定することができるという点に関しては、小菅一弘、大住智宏、千葉晋彦による「単一物体を操る複数移動ロボットの分散協調制御」、日本ロボット学会誌16巻1号、pp.87〜95に記載されている。
【0034】
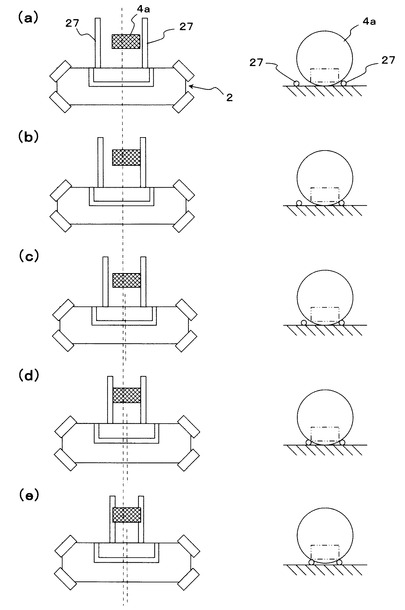
そして、本実施例の場合、前記一対のリフトバー27を車両4の接地ポイントとしての車輪4aの両側から互いに近接させる際、図10(a)〜図10(e)に示す如く、一方(図の例では右側)のリフトバー27が他方(図の例では左側)のリフトバー27より先に車輪4aに接触した場合、該一方のリフトバー27が車輪4aから受ける力に基づき、該力の作用する方向(図の例では右方向)へ台車本体2を移動させつつ前記一対のリフトバー27を互いに近接させ、前記他方のリフトバー27が車輪4aに接触した時点で前記台車本体2を停止させるよう構成してある。
【0035】
即ち、前記車輪4aの持ち上げ開始時にリフトバー27間の中心位置と車輪4aの中心位置とが一致していない場合でも、二本のリフトバー27間の中心位置で車輪4aを持ち上げることができるよう、リフター5が車輪4aから受ける力/モーメントをロードセル13で検出し、図9に示す如く、MBOを原点とするMBX−MBY軸の座標系に変換し、該座標変換して求めた台車本体2に作用する力/モーメントMBF=[MBFx,MBFy,MBNz]T∈R3のうち、MBX軸方向の力MBFxに対して、[数1]に示す見掛けのインピーダンス特性を持つように台車本体2を制御する。
【数1】

【0036】
ここで、Mx、Dx∈Rはそれぞれ慣性、粘性係数である。又、台車本体2の実際の軌道x∈Rと台車本体2の目標軌道xd∈Rを用いてΔxは[数2]のように表される。
[数2]
Δx=x−xd
【0037】
尚、[数1]に示す見掛けのインピーダンス特性を持つように台車本体2を制御する代わりに、Mx=0として力の情報がそのまま速度になる、いわゆるダンピング特性を持つように台車本体2を制御することも可能である。
【0038】
次に、上記実施例の作用を説明する。
【0039】
先ず、停車した車両4に対し、リーダ台車Aを走行させてリフター5の車輪浮上支持装置18のリフトバー27を車両4の接地ポイントとしての一つの車輪4aの前後に配置すると共に、各フォロワ台車Bを走行させてリフター5の車輪浮上支持装置18のリフトバー27を車両4の残りの接地ポイントとしての各車輪4aの前後に配置する。
【0040】
続いて、リーダ制御部31並びにフォロワ制御部32からの駆動信号により、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉アクチュエータ23を所望の方向へ回転駆動すると、対を成すリフトバー27が互いに近接する方向へ移動していき、リフトバー27上に車両4の車輪4aが載置される形となって、該車両4がリフトアップされる。
【0041】
ここで、図10(a)に示す如く、一対のリフトバー27を車輪4aの両側に配置した際、一方(図の例では右側)のリフトバー27が車輪4aに近い状態となっていた場合、リフトバー27を互いに近接させていくと、図10(b)に示す如く、一方のリフトバー27が他方(図の例では左側)のリフトバー27より先に車輪4aに接触するが、一方のリフトバー27が車輪4aから受ける力に基づき、該力の作用する方向(図の例では右方向)へ台車本体2が、図10(c)に示す如く、移動しつつ前記一対のリフトバー27が互いに近接し、図10(d)に示す如く、他方のリフトバー27が車輪4aに接触すると、前記台車本体2は停止し、前記一対のリフトバー27が更に近接してストロークエンドに達すると、図10(e)に示す如く、車輪4aが完全に浮いた状態となる。
【0042】
この結果、前記車輪4aの持ち上げ開始時にリフトバー27間の中心位置と車輪4aの中心位置とが一致していない場合でも、二本のリフトバー27間の中心位置で車輪4aを持ち上げることが可能となるため、バランスが良くなる一方、前記リフトバー開閉アクチュエータ23は、駆動ユニット用ガイドレールに沿ってスライド自在に配設しなくて済むと共に、該リフトバー開閉アクチュエータ23を駆動ユニット用ガイドレール上の所望位置に保持するための自動調芯位置保持用固定装置を配設する必要もなくなり、構造が複雑化することを回避可能となる。
【0043】
前記リーダ台車Aのリーダ制御部31には、図7に示す如く、目標軌道情報が予め入力されており、前記リーダ台車Aの台車本体2の走行アクチュエータとしての走行モータ7へ電流指令値が出力されると共に、前記リーダ台車Aの無線通信装置39より各フォロワ台車Bへ制御情報が送信されつつ、リーダ台車Aの台車本体2が目標軌道に沿って移動していく。これと同時に、前記リーダ台車Aと各フォロワ台車Bとの間で車両4を介して相互に働く相互作用力が前記各フォロワ台車Bの力センサとしてのロードセル13により力情報として検出され、前記各フォロワ台車Bの台車本体2の実際の軌道情報が前記軌道センサとしての走行エンコーダ11によって検出され、前記リーダ台車Aから無線通信装置39にて送信される制御情報が各フォロワ台車Bの無線通信装置40で受信され、前記フォロワ制御部32において、前記各フォロワ台車Bの力センサとしてのロードセル13で検出された力情報と、前記各フォロワ台車Bの軌道センサとしての走行エンコーダ11で検出された実際の軌道情報と、前記無線通信装置40で受信したリーダ台車Aからの制御情報とに基づき、前記各フォロワ台車Bの台車本体2の走行アクチュエータへ電流指令値が出力され、前記各フォロワ台車Bの台車本体2が前記リーダ台車Aの動きに追従して移動していく。このため、仮に、前記各フォロワ台車Bの台車本体2がリーダ台車Aの動きに追従して移動するための前記ロードセル13で検出された力情報に、例えば、地面と前記リフター5の接地支持輪26との摩擦や慣性力等の外乱要素が影響を与える可能性があったとしても、前記リーダ台車Aの動きに各フォロワ台車Bが追従しようとする動きに対する誤差を修正するために必要となる制御情報が前記リーダ制御部31より、前記リーダ台車Aの無線通信装置39にて送信され各フォロワ台車Bの無線通信装置40で受信され、前記誤差を修正する計算が前記制御情報に基づいてフォロワ制御部32で行われるため、より安定した状態で前記リーダ台車Aと各フォロワ台車Bとを協調させて車両4を移動させることが可能となる。尚、前記リーダ台車Aと各フォロワ台車Bとを協調させて車両4を移動させる際には、図8に示す如く、i番目のフォロワ台車Bに対して、第一のグループをi番目のフォロワ台車Bそれ自身とし、第二のグループをリーダ台車A及びi番目以外のフォロワ台車Bをまとめた一台の仮想リーダ台車A´(これをi番目の仮想リーダ台車A´)とした場合、i番目の仮想リーダ台車A´は、i番目のフォロワ台車Bから見ると、図8に示す如く、一台のリーダのように振舞うため、この仮想リーダという考え方を用いることにより、フォロワ台車Bが一台の場合の目標軌道の推定方法を用いて、前記i番目のフォロワ台車Bは、リーダ台車A及び自分以外のフォロワ台車Bをまとめた一台のi番目の仮想リーダ台車A´の目標軌道を推定するようになっている。
【0044】
前記リーダ台車A及び各フォロワ台車Bが目標地点に到達した際には、前述の操作と逆に、前記リフトバー27が互いに離反する方向へ駆動され、リフトバー27上に載置される形となっていた前記車両4が目的地点に下ろされ、前記リーダ台車A及び各フォロワ台車Bが車両4の幅方向両側へ退避していく。
【0045】
このように、リーダ台車Aのリフター5と各フォロワ台車Bのリフター5により車両4をリフトアップした状態で、リーダ台車Aが与えられた目標軌道に沿って移動していくと、各フォロワ台車Bは、前記リーダ台車A及び自分以外のフォロワ台車Bをまとめた一台の仮想リーダ台車A´の動きを推定しつつ追従することにより、前記リーダ台車Aと協調して車両4を移動させることが可能となり、無線通信による台車相互間でのリアルタイムの情報交換に基づく制御方法において、通信障害で情報が途切れたり遅れたりすることで、車両等の物体を落としたり、傷つけたりする心配もない。
【0046】
しかも、移動すべき物体がバス等のホイールベースの長い車両4や接地ポイントとしての車輪4aの数が多い車両4であったとしても、移動装置自体を大きくしたり、車輪4aの数に合わせた機構のものを別途用意しなくて済み、移動装置の種類を増やす必要がなくなると共に、移動装置が大型化しない分、移動経路や保管スペースを広くとる必要もない。
【0047】
尚、リーダ台車Aと各フォロワ台車Bとの間で車両4を介在させて搬送を行う際に、車両4の重量があまり重くない場合、前記リフトバー27の車輪支持ローラ25上で車両4の車輪4aが滑ってしまい、搬送に支障をきたす虞があるが、前記リフトバー27の車輪支持ローラ25表面には、ローレット加工、或いは滑り止め塗料の塗装といった滑り止め加工を施すようにしてあるため、仮に車両4が軽かったとしても、前記リフトバー27の車輪支持ローラ25上で車両4の車輪4aが滑ってしまうことが防止され、搬送に支障をきたす心配がない。
【0048】
こうして、無線通信のみによる台車相互間でのリアルタイムの情報交換を行うようにした協働搬送とは異なり、車両4を落としたり、傷つけたりする心配がなく、更に、大きさや接地ポイント数の異なる車両4にも装置の種類を増やすことなく対応し得、車両4を確実に且つより安定して移動させることができ、移動経路や保管スペースの削減をも図り得る。
【0049】
しかも、本実施例では、前記車輪4aの持ち上げ開始時にリフトバー27間の中心位置と車輪4aの中心位置とが一致していない場合でも、二本のリフトバー27間の中心位置で車輪4aを持ち上げることが可能となるため、構造を複雑化させることなく、リーダ台車A並びにフォロワ台車Bの台車本体2の幅方向中心位置で車両4をリフトアップしてバランス良く支持し得る。
【0050】
尚、本発明の物体移動装置は、上述の実施例にのみ限定されるものではなく、車両は四輪車に限らず、複数の車輪を持つ車両であればどのような車両にも適用可能なこと、又、駐車施設に限らず、駐車違反車両の移動やカーフェリー内での車両の移動等にも適用可能なこと、更に又、車両以外の物体にも適用可能なこと等、その他、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【符号の説明】
【0051】
1 走行駆動装置
2 台車本体
2a 台車フレーム
3 連結機構
4 車両(物体)
4a 車輪(接地ポイント)
5 リフター
6 走行車輪
13 ロードセル
18 車輪浮上支持装置
23 リフトバー開閉アクチュエータ
26 接地支持輪
27 リフトバー
31 リーダ制御部
32 フォロワ制御部
39 無線通信装置
40 無線通信装置
A リーダ台車
A´ 仮想リーダ台車
B フォロワ台車
【技術分野】
【0001】
本発明は、物体移動装置に関するものである。
【背景技術】
【0002】
従来、任意の位置に停車した車両を駐車施設における所定位置に搬送できるようにした入出車装置の一般的技術水準を示すものとしては、例えば、特許文献1がある。
【0003】
特許文献1に示される装置は、それぞれ車両支持機構及び走行機構を備える左側搬送台車と右側搬送台車とからなり、該左側搬送台車と右側搬送台車とがそれぞれ独立して移動しつつ、協働して車両を支持し、搬送するようになっている。
【0004】
前記左側搬送台車と右側搬送台車は、無線通信によってリアルタイムに情報交換を行うことにより、協働している。
【0005】
しかしながら、前述の如く、無線通信による台車相互間でのリアルタイムの情報交換に基づいて前記左側搬送台車と右側搬送台車とを協働させるのでは、通信障害で情報が途切れたり遅れたりすることもあり、前記左側搬送台車と右側搬送台車とを協働させるために必要な情報をリアルタイムに安定して得ることが難しかった。又、情報が安定して得られなかった場合、搬送される車両等の物体に必要以上の内力が加わることとなり、最悪の場合、物体を落としたり、傷つけたりする可能性があった。
【0006】
このため、本発明者等は、無線通信のみによる台車相互間でのリアルタイムの情報交換を行うようにした協働搬送とは異なり、車両等の物体を落としたり、傷つけたりする心配がなく、複数の台車を協調制御により作動させることで、車両等の物体を確実に且つより安定して移動させ得る物体移動装置を提案している。(例えば、特許文献2参照。)
【0007】
前記特許文献2に開示した物体移動装置は、複数の台車を協調制御により作動させるという非常に高度で優れた機能を有するものである反面、移動すべき物体がバス等のホイールベースの長い車両や接地ポイントとしての車輪の数が多い車両であった場合、移動装置自体を大きくしたり、車輪の数に合わせた機構のものを別途用意しなければならず、移動装置の種類が増える一方、移動装置が大型化した場合には、移動経路を広くとり、且つ保管スペースも広く必要になるという欠点を有していた。
【0008】
そこで、本発明者等は、車両等の物体の一つの接地ポイントとしての車輪をリフトアップし、与えられた目標軌道に沿って移動可能なリーダ台車と、該リーダ台車にてリフトアップされる車輪以外の一つの車輪をリフトアップする複数台のフォロワ台車とを備えることにより、大きさや接地ポイント数の異なる車両等の物体にも装置の種類を増やすことなく対応し得、車両等の物体を確実に且つより安定して移動させることができ、移動経路や保管スペースの削減をも図り得る物体移動装置を提案している。(例えば、特許文献3参照。)
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2004−169451号公報
【特許文献2】特開2009−108542号公報
【特許文献3】特開2009−286570号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
ところで、前記特許文献3に開示した物体移動装置においては、リフターの車輪浮上支持装置における一対のリフトバーを車両の各車輪の前後に配置して互いに近接させることにより、該車両をリフトアップするよう構成してある。
【0011】
ここで、前記リフトバーを開閉させるためのリフトバー開閉アクチュエータは駆動ユニット用ガイドレールに沿ってスライド自在に配設してあるため、仮に、前記リフトバーの近接動作において、先に車両前後方向前側のリフトバーが車輪に接触した場合、後側のリフトバーが前側へ移行していく一方、逆に、先に車両前後方向後側のリフトバーが車輪に接触した場合、前側のリフトバーが後側へ移行していく形となり、車両の車輪に対するリーダ台車並びに各フォロワ台車の停止位置が該車輪の前後方向へ多少ずれていたとしてもそれに影響されずに、前記リフトバー開閉アクチュエータが必ず車輪の前後方向中心部に位置して自動調芯されることとなる。
【0012】
しかしながら、前述の如く、車両の車輪に対するリーダ台車並びに各フォロワ台車の停止位置が該車輪の前後方向へ大きくずれていた場合、リーダ台車並びに各フォロワ台車の台車本体の幅方向中心から大きくずれる位置で車両の車輪をリフトアップして支持する形となるため、バランスが悪く、改善の余地が残されていた。
【0013】
又、前記リフトバー開閉アクチュエータは、駆動ユニット用ガイドレールに沿ってスライド自在に配設すると共に、該リフトバー開閉アクチュエータを駆動ユニット用ガイドレール上の所望位置に保持するための自動調芯位置保持用固定装置を配設する必要があり、構造が複雑化するという問題も有していた。
【0014】
本発明は、斯かる実情に鑑み、構造を複雑化させることなく、リーダ台車並びにフォロワ台車の台車本体の幅方向中心位置で物体をリフトアップしてバランス良く支持し得る物体移動装置を提供しようとするものである。
【課題を解決するための手段】
【0015】
本発明は、走行駆動装置により全方向に自走可能な台車本体と、該台車本体に連結機構を介して取り付けられ且つ一対のリフトバーを接地ポイントが複数存在する物体の一つの接地ポイントの両側に配置して互いに近接させることにより、該物体の一つの接地ポイントをリフトアップするリフターとを有し、与えられた目標軌道に沿って移動可能なリーダ台車と、
走行駆動装置により全方向に自走可能な台車本体と、該台車本体に連結機構を介して取り付けられ且つ一対のリフトバーを前記物体の前記リーダ台車にてリフトアップされる接地ポイント以外の一つの接地ポイントの両側に配置して互いに近接させることにより、該物体の一つの接地ポイントをリフトアップするリフターとを有し、前記リーダ台車の動きを推定しつつ追従することにより、該リーダ台車と協調して物体を移動させるフォロワ台車とを備えた物体移動装置において、
前記一対のリフトバーを接地ポイントの両側から互いに近接させる際、一方のリフトバーが他方のリフトバーより先に接地ポイントに接触した場合、該一方のリフトバーが接地ポイントから受ける力に基づき、該力の作用する方向へ台車本体を移動させつつ前記一対のリフトバーを互いに近接させ、前記他方のリフトバーが接地ポイントに接触した時点で前記台車本体を停止させるよう構成したことを特徴とする物体移動装置にかかるものである。
【0016】
上記手段によれば、以下のような作用が得られる。
【0017】
一対のリフトバーを物体の接地ポイントの両側に配置した際、一方のリフトバーが接地ポイントに近い状態となっていた場合、リフトバーを互いに近接させていくと、一方のリフトバーが他方のリフトバーより先に接地ポイントに接触するが、一方のリフトバーが接地ポイントから受ける力に基づき、該力の作用する方向へ台車本体が移動しつつ前記一対のリフトバーが互いに近接し、他方のリフトバーが接地ポイントに接触すると、前記台車本体は停止し、前記一対のリフトバーが更に近接していき、接地ポイントが完全に浮いた状態となる。
【0018】
この結果、前記接地ポイントの持ち上げ開始時にリフトバー間の中心位置と接地ポイントの中心位置とが一致していない場合でも、二本のリフトバー間の中心位置で接地ポイントを持ち上げることが可能となるため、バランスが良くなる一方、前記リフトバーを開閉するためのアクチュエータは、駆動ユニット用ガイドレールに沿ってスライド自在に配設しなくて済むと共に、該リフトバーを開閉するためのアクチュエータを駆動ユニット用ガイドレール上の所望位置に保持するための自動調芯位置保持用固定装置を配設する必要もなくなり、構造が複雑化することを回避可能となる。
【発明の効果】
【0019】
本発明の物体移動装置によれば、構造を複雑化させることなく、リーダ台車並びにフォロワ台車の台車本体の幅方向中心位置で物体をリフトアップしてバランス良く支持し得るという優れた効果を奏し得る。
【図面の簡単な説明】
【0020】
【図1】本発明の物体移動装置の実施例を示す全体概要斜視図である。
【図2】本発明の物体移動装置の実施例におけるリーダ台車(フォロワ台車)を示す斜視図である。
【図3】本発明の物体移動装置の実施例におけるリーダ台車(フォロワ台車)を底面側から示す斜視図である。
【図4】本発明の物体移動装置の実施例におけるリーダ台車(フォロワ台車)の連結機構を示す斜視図である。
【図5】本発明の物体移動装置の実施例におけるリーダ台車(フォロワ台車)のリフターの車輪浮上支持装置を示す斜視図である。
【図6】本発明の物体移動装置の実施例におけるリーダ台車の全体制御系統並びにフォロワ台車の全体制御系統を示すブロック図である。
【図7】本発明の物体移動装置の実施例におけるリーダ台車と各フォロワ台車の協調制御に関するシステム図である。
【図8】本発明の物体移動装置の実施例における一台のフォロワ台車に対する仮想リーダ台車のイメージ図である。
【図9】本発明の物体移動装置の実施例におけるリフターに加わる力ベクトルを演算する際の座標系を示す平面図である。
【図10】本発明の物体移動装置の実施例におけるリーダ台車及びフォロワ台車のリフターの車輪浮上支持装置を示す作動状態説明図であって、(a)は一対のリフトバーを車輪の両側に配置した際、一方のリフトバーが車輪に近い状態を示す図、(b)は一方のリフトバーが他方のリフトバーより先に車輪に接触した状態を示す図、(c)は一方のリフトバーが車輪から受ける力に基づき、該力の作用する方向へ台車本体を移動させつつ前記一対のリフトバーを互いに近接させる状態を示す図、(d)は他方のリフトバーが車輪に接触した状態を示す図、(e)はリフトバーが閉じて車輪が浮いた状態を示す図である。
【発明を実施するための形態】
【0021】
以下、本発明の実施の形態を添付図面を参照して説明する。
【0022】
図1〜図10は本発明の物体移動装置の実施例であって、該物体移動装置は、
走行駆動装置1により全方向に自走可能な台車本体2と、該台車本体2に連結機構3を介して取り付けられ且つ物体としての車両4の一つの車輪4a(接地ポイント)をリフトアップするリフター5とを有し、与えられた目標軌道に沿って移動可能なリーダ台車Aと、
走行駆動装置1により全方向に自走可能な台車本体2と、該台車本体2に連結機構3を介して取り付けられ且つ前記車両4の前記リーダ台車Aにてリフトアップされる車輪4a以外の一つの車輪4a(接地ポイント)をリフトアップするリフター5とを有した複数台(図の例では三台)のフォロワ台車Bとを備え、
前記各フォロワ台車Bが前記リーダ台車A及び自分以外のフォロワ台車Bをまとめたものを一台の仮想リーダ台車A´(図8参照)と想定し、該仮想リーダ台車A´の動きを推定しつつ追従することにより、前記リーダ台車Aと複数台のフォロワ台車Bとが協調して車両4を移動させるよう構成したものである。
【0023】
前記台車本体2は、図1〜図3に示す如く、直方体の四隅部をカットして細長い八角柱形状に組み立てられた台車フレーム2aの四隅部に、走行駆動装置1として走行車輪6を走行モータ7(走行アクチュエータ)(図6参照)の作動により水平な車軸8を中心に回転可能に配設してなる構成を有している。尚、前記走行車輪6は、操舵を必要としないオムニホイール(登録商標)やメカナムホイール等の全方向移動車輪とし、台車本体2の幅方向(図9の左右方向)に対しそれぞれ45°の角度を持ち、且つ対角に位置する走行車輪6同士が平行となるようにしてある。又、前記走行モータ7には、軌道センサとしての走行エンコーダ11(図6参照)が一体に組み込まれ、台車本体2の実際の軌道情報を検出できるようにしてある。更に又、前記走行車輪6の全てが常に地面と接触するよう、四個のうち二個の走行車輪6はサスペンション機構6aを介して台車フレーム2aに取り付けるようにしてある。
【0024】
前記連結機構3は、図3及び図4に示す如く、力センサとしての引張圧縮型のロードセル13の両端にロッド14を取り付けた連結部材15を、その一端がユニバーサルジョイント16により台車本体2側に連結され他端がユニバーサルジョイント16によりリフター5側に連結されるよう、同一水平面内に複数(図9の例では三個)配設してなるパラレルリンク機構17によって構成してある。この場合、前記台車本体2に対しリフター5は、図2に示す如く、水平面内におけるX−Y方向に移動する方向の2自由度と、該X−Y方向に対して直交するZ軸を中心として回転する方向の1自由度とを加えた平面3自由度が拘束され、且つX軸を中心として回転する方向の1自由度と、Y軸を中心として回転する方向の1自由度と、Z軸方向に移動する方向の1自由度とを加えた3自由度がフリーとなるよう、前記パラレルリンク機構17(図3、図4及び図9参照)を介して配置される形となる。
【0025】
前記リフター5は、図1〜図3及び図5に示す如く、前記車両4の接地ポイントとしての各車輪4aを支持するための車輪浮上支持装置18を装備し、該車輪浮上支持装置18は、前記台車本体2に対し連結機構3を介して取り付けられるリフターフレーム5aに、リニアガイドレール19を台車本体2の幅方向(図9の左右方向)へ延びるよう固定配置すると共に、該リニアガイドレール19に対し、リニアガイドブロック19aを介して一対のラック部材21を互いにそのラック部の形成面が対向した状態で前記リニアガイドレール19に沿ってスライド自在となるよう配設し、前記リフターフレーム5aの中央部に一体に設けられ両端が開放された中空箱形のベース枠5bに、エンコーダ等のリフトバー開閉センサ22が一体に設けられたモータ等のリフトバー開閉アクチュエータ23を取り付け、該リフトバー開閉アクチュエータ23によって回転駆動される駆動ピニオン24を前記一対のラック部材21の互いに対向するラック部に対し前記ベース枠5b内でその両方に噛合させ、前記リニアガイドブロック19aから、底面が開放された断面門型のカバーフレーム5cを張り出させ、該カバーフレーム5cに対し、外周に車輪支持ローラ25が回転自在に嵌装され且つ先端部と基端部に接地支持輪26が取り付けられたリフトバー27を、前記ラック部材21と直角な水平方向へ延び且つ前記リニアガイドレール19と平行な揺動軸5dを中心に揺動自在となるよう取り付けてなる構成を有し、前記リフター5の車輪浮上支持装置18における一対のリフトバー27を前記車両4の各車輪4aの前後に配置して互いに近接させることにより、該車両4をリフトアップするよう構成してある。尚、前記リフトバー27の両端に取り付けた接地支持輪26により車両4の重量全てを支持するため、台車本体2は、車両4の重量を支持できるよう頑丈に設計する必要がなくなるという利点があり、更に、前記リフトバー27をその開閉方向と平行な揺動軸5dを中心に揺動自在となるようにしているため、二本のリフトバー27に取り付けた四つの接地支持輪26は常に接地する形となり、好ましい。
【0026】
前記リフトバー27の車輪支持ローラ25表面には、ローレット加工、或いは滑り止め塗料の塗装といった滑り止め加工を施すようにしてある。
【0027】
前記接地支持輪26には、一般的なキャスターを用いるようにしてあるが、前記走行車輪6と同様に、操舵を必要としないオムニホイール(登録商標)やメカナムホイール等の全方向移動車輪を用いても良いことは言うまでもない。
【0028】
一方、図6はリーダ台車Aの全体制御系統並びにフォロワ台車Bの全体制御系統を示すブロック図であり、前記リーダ台車Aに搭載されたリーダ制御部31には、前記台車本体2の走行駆動装置1における走行アクチュエータとしての走行モータ7と、前記台車本体2の走行駆動装置1における軌道センサとしての走行エンコーダ11と、前記連結機構3の力センサとしてのロードセル13と、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉アクチュエータ23と、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉センサ22と、前記フォロワ台車Bへ制御情報を送信するための無線通信装置39とを接続し、前記連結機構3の力センサとしてのロードセル13による検出信号と、前記台車本体2の走行駆動装置1における軌道センサとしての走行エンコーダ11による検出信号とに基づいて、前記台車本体2の走行駆動装置1における走行アクチュエータとしての走行モータ7に駆動信号を出力すると共に、前記無線通信装置39にてフォロワ台車Bへの制御情報を送信しつつ、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉センサ22による検出信号に基づいて、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉アクチュエータ23に駆動信号を出力する一方、
前記フォロワ台車Bに搭載されたフォロワ制御部32には、前記台車本体2の走行駆動装置1における走行アクチュエータとしての走行モータ7と、前記台車本体2の走行駆動装置1における軌道センサとしての走行エンコーダ11と、前記連結機構3の力センサとしてのロードセル13と、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉アクチュエータ23と、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉センサ22と、前記リーダ台車Aからの制御情報を受信するための無線通信装置40とを接続し、前記連結機構3の力センサとしてのロードセル13による検出信号と、前記台車本体2の走行駆動装置1における軌道センサとしての走行エンコーダ11による検出信号と、前記無線通信装置40で受信したリーダ台車Aからの制御情報とに基づいて、前記台車本体2の走行駆動装置1における走行アクチュエータとしての走行モータ7に駆動信号を出力すると共に、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉センサ22による検出信号に基づいて、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉アクチュエータ23に駆動信号を出力するようにしてある。
【0029】
前記リーダ台車Aと複数台(図の例では三台)のフォロワ台車Bの協調制御に関するシステムについてより詳しくは、図7に示す如く、前記リーダ台車Aと各フォロワ台車Bとの間で車両4を介して相互に働く相互作用力を前記リーダ台車Aの力センサとしてのロードセル13により力情報として検出し、前記リーダ台車Aの台車本体2の実際の軌道情報を前記軌道センサとしての走行エンコーダ11によって検出し、前記リーダ制御部31において、予め入力される目標軌道情報と、前記リーダ台車Aの力センサとしてのロードセル13で検出された力情報と、前記リーダ台車Aの軌道センサとしての走行エンコーダ11で検出された実際の軌道情報とに基づき、前記リーダ台車Aの台車本体2の走行アクチュエータへ電流指令値を出力すると共に、前記無線通信装置39にて各フォロワ台車Bへの制御情報を送信し、前記リーダ台車Aの台車本体2を目標軌道に沿って移動させる一方、
前記リーダ台車Aと各フォロワ台車Bとの間で車両4を介して相互に働く相互作用力を前記各フォロワ台車Bの力センサとしてのロードセル13により力情報として検出し、前記各フォロワ台車Bの台車本体2の実際の軌道情報を前記軌道センサとしての走行エンコーダ11によって検出し、前記リーダ台車Aから無線通信装置39にて送信される制御情報を無線通信装置40で受信し、前記フォロワ制御部32において、前記各フォロワ台車Bの力センサとしてのロードセル13で検出された力情報と、前記各フォロワ台車Bの軌道センサとしての走行エンコーダ11で検出された実際の軌道情報と、前記無線通信装置40で受信したリーダ台車Aからの制御情報とに基づき、前記各フォロワ台車Bの台車本体2の走行アクチュエータへ電流指令値を出力し、前記各フォロワ台車Bの台車本体2を前記リーダ台車Aの動きに追従させて移動させるようにしてある。
【0030】
但し、前記フォロワ台車Bが複数台(図の例では三台)となった場合、図7に示す如く、自分以外の全ての台車からの影響を受けることになるため、i番目のフォロワ台車Bはリーダ台車Aに与えられた目標軌道を推定することができなくなる。そこで、i番目のフォロワ台車Bに対して、第一のグループをi番目のフォロワ台車Bそれ自身とし、第二のグループをリーダ台車A及びi番目以外のフォロワ台車Bをまとめた一台の仮想リーダ台車A´(これをi番目の仮想リーダ台車A´)とする。即ち、i番目の仮想リーダ台車A´は、i番目のフォロワ台車Bから見ると、図8に示す如く、一台のリーダのように振舞うと考えられる。この仮想リーダという考え方を用いれば、フォロワ台車Bが一台の場合の目標軌道の推定方法を用いて、前記i番目のフォロワ台車Bは、リーダ台車A及び自分以外のフォロワ台車Bをまとめた一台のi番目の仮想リーダ台車A´の目標軌道を推定することができる。
【0031】
尚、前記各フォロワ台車Bの台車本体2がリーダ台車Aの動きに追従して移動するための前記ロードセル13で検出された力情報に、例えば、地面と前記リフター5の接地支持輪26との摩擦や慣性力等の外乱要素が影響を与える場合、前記リーダ台車Aの動きに各フォロワ台車Bが追従しようとする動きに対し誤差を増大させてしまうので、より安定した状態で前記リーダ台車Aと各フォロワ台車Bとを協調させて車両4を移動させるには、前述の如き誤差を修正するための制御情報が必要となることから、該制御情報を前記リーダ制御部31より、前記リーダ台車Aの無線通信装置39にて送信し各フォロワ台車Bの無線通信装置40で受信し、フォロワ制御部32で前記誤差を修正する計算を前記制御情報に基づいて行うようにしてある。
【0032】
ここで、前記力センサとしての引張圧縮型のロードセル13が介装された連結部材15を平面3自由度を拘束するパラレルリンク機構17として図9に示すような配置で三つ取り付けた場合、ロードセル13による検出値をヤコビ行列で座標変換すると、外力としてリフター5に加わる力を平面3自由度の力情報として得ることができるが、具体的な計算例については、特許文献3に記載されている。
【0033】
又、リーダ台車Aとフォロワ台車Bの協調制御の基本的な考え方、並びにフォロワ台車Bが複数台となった場合に、仮想リーダという考え方を用いることにより、フォロワ台車Bが一台の場合の目標軌道の推定方法と同様に、i番目のフォロワ台車Bが、リーダ台車A及び自分以外のフォロワ台車Bをまとめた一台のi番目の仮想リーダ台車A´の目標軌道を推定することができるという点に関しては、小菅一弘、大住智宏、千葉晋彦による「単一物体を操る複数移動ロボットの分散協調制御」、日本ロボット学会誌16巻1号、pp.87〜95に記載されている。
【0034】
そして、本実施例の場合、前記一対のリフトバー27を車両4の接地ポイントとしての車輪4aの両側から互いに近接させる際、図10(a)〜図10(e)に示す如く、一方(図の例では右側)のリフトバー27が他方(図の例では左側)のリフトバー27より先に車輪4aに接触した場合、該一方のリフトバー27が車輪4aから受ける力に基づき、該力の作用する方向(図の例では右方向)へ台車本体2を移動させつつ前記一対のリフトバー27を互いに近接させ、前記他方のリフトバー27が車輪4aに接触した時点で前記台車本体2を停止させるよう構成してある。
【0035】
即ち、前記車輪4aの持ち上げ開始時にリフトバー27間の中心位置と車輪4aの中心位置とが一致していない場合でも、二本のリフトバー27間の中心位置で車輪4aを持ち上げることができるよう、リフター5が車輪4aから受ける力/モーメントをロードセル13で検出し、図9に示す如く、MBOを原点とするMBX−MBY軸の座標系に変換し、該座標変換して求めた台車本体2に作用する力/モーメントMBF=[MBFx,MBFy,MBNz]T∈R3のうち、MBX軸方向の力MBFxに対して、[数1]に示す見掛けのインピーダンス特性を持つように台車本体2を制御する。
【数1】
【0036】
ここで、Mx、Dx∈Rはそれぞれ慣性、粘性係数である。又、台車本体2の実際の軌道x∈Rと台車本体2の目標軌道xd∈Rを用いてΔxは[数2]のように表される。
[数2]
Δx=x−xd
【0037】
尚、[数1]に示す見掛けのインピーダンス特性を持つように台車本体2を制御する代わりに、Mx=0として力の情報がそのまま速度になる、いわゆるダンピング特性を持つように台車本体2を制御することも可能である。
【0038】
次に、上記実施例の作用を説明する。
【0039】
先ず、停車した車両4に対し、リーダ台車Aを走行させてリフター5の車輪浮上支持装置18のリフトバー27を車両4の接地ポイントとしての一つの車輪4aの前後に配置すると共に、各フォロワ台車Bを走行させてリフター5の車輪浮上支持装置18のリフトバー27を車両4の残りの接地ポイントとしての各車輪4aの前後に配置する。
【0040】
続いて、リーダ制御部31並びにフォロワ制御部32からの駆動信号により、前記リフター5の車輪浮上支持装置18におけるリフトバー開閉アクチュエータ23を所望の方向へ回転駆動すると、対を成すリフトバー27が互いに近接する方向へ移動していき、リフトバー27上に車両4の車輪4aが載置される形となって、該車両4がリフトアップされる。
【0041】
ここで、図10(a)に示す如く、一対のリフトバー27を車輪4aの両側に配置した際、一方(図の例では右側)のリフトバー27が車輪4aに近い状態となっていた場合、リフトバー27を互いに近接させていくと、図10(b)に示す如く、一方のリフトバー27が他方(図の例では左側)のリフトバー27より先に車輪4aに接触するが、一方のリフトバー27が車輪4aから受ける力に基づき、該力の作用する方向(図の例では右方向)へ台車本体2が、図10(c)に示す如く、移動しつつ前記一対のリフトバー27が互いに近接し、図10(d)に示す如く、他方のリフトバー27が車輪4aに接触すると、前記台車本体2は停止し、前記一対のリフトバー27が更に近接してストロークエンドに達すると、図10(e)に示す如く、車輪4aが完全に浮いた状態となる。
【0042】
この結果、前記車輪4aの持ち上げ開始時にリフトバー27間の中心位置と車輪4aの中心位置とが一致していない場合でも、二本のリフトバー27間の中心位置で車輪4aを持ち上げることが可能となるため、バランスが良くなる一方、前記リフトバー開閉アクチュエータ23は、駆動ユニット用ガイドレールに沿ってスライド自在に配設しなくて済むと共に、該リフトバー開閉アクチュエータ23を駆動ユニット用ガイドレール上の所望位置に保持するための自動調芯位置保持用固定装置を配設する必要もなくなり、構造が複雑化することを回避可能となる。
【0043】
前記リーダ台車Aのリーダ制御部31には、図7に示す如く、目標軌道情報が予め入力されており、前記リーダ台車Aの台車本体2の走行アクチュエータとしての走行モータ7へ電流指令値が出力されると共に、前記リーダ台車Aの無線通信装置39より各フォロワ台車Bへ制御情報が送信されつつ、リーダ台車Aの台車本体2が目標軌道に沿って移動していく。これと同時に、前記リーダ台車Aと各フォロワ台車Bとの間で車両4を介して相互に働く相互作用力が前記各フォロワ台車Bの力センサとしてのロードセル13により力情報として検出され、前記各フォロワ台車Bの台車本体2の実際の軌道情報が前記軌道センサとしての走行エンコーダ11によって検出され、前記リーダ台車Aから無線通信装置39にて送信される制御情報が各フォロワ台車Bの無線通信装置40で受信され、前記フォロワ制御部32において、前記各フォロワ台車Bの力センサとしてのロードセル13で検出された力情報と、前記各フォロワ台車Bの軌道センサとしての走行エンコーダ11で検出された実際の軌道情報と、前記無線通信装置40で受信したリーダ台車Aからの制御情報とに基づき、前記各フォロワ台車Bの台車本体2の走行アクチュエータへ電流指令値が出力され、前記各フォロワ台車Bの台車本体2が前記リーダ台車Aの動きに追従して移動していく。このため、仮に、前記各フォロワ台車Bの台車本体2がリーダ台車Aの動きに追従して移動するための前記ロードセル13で検出された力情報に、例えば、地面と前記リフター5の接地支持輪26との摩擦や慣性力等の外乱要素が影響を与える可能性があったとしても、前記リーダ台車Aの動きに各フォロワ台車Bが追従しようとする動きに対する誤差を修正するために必要となる制御情報が前記リーダ制御部31より、前記リーダ台車Aの無線通信装置39にて送信され各フォロワ台車Bの無線通信装置40で受信され、前記誤差を修正する計算が前記制御情報に基づいてフォロワ制御部32で行われるため、より安定した状態で前記リーダ台車Aと各フォロワ台車Bとを協調させて車両4を移動させることが可能となる。尚、前記リーダ台車Aと各フォロワ台車Bとを協調させて車両4を移動させる際には、図8に示す如く、i番目のフォロワ台車Bに対して、第一のグループをi番目のフォロワ台車Bそれ自身とし、第二のグループをリーダ台車A及びi番目以外のフォロワ台車Bをまとめた一台の仮想リーダ台車A´(これをi番目の仮想リーダ台車A´)とした場合、i番目の仮想リーダ台車A´は、i番目のフォロワ台車Bから見ると、図8に示す如く、一台のリーダのように振舞うため、この仮想リーダという考え方を用いることにより、フォロワ台車Bが一台の場合の目標軌道の推定方法を用いて、前記i番目のフォロワ台車Bは、リーダ台車A及び自分以外のフォロワ台車Bをまとめた一台のi番目の仮想リーダ台車A´の目標軌道を推定するようになっている。
【0044】
前記リーダ台車A及び各フォロワ台車Bが目標地点に到達した際には、前述の操作と逆に、前記リフトバー27が互いに離反する方向へ駆動され、リフトバー27上に載置される形となっていた前記車両4が目的地点に下ろされ、前記リーダ台車A及び各フォロワ台車Bが車両4の幅方向両側へ退避していく。
【0045】
このように、リーダ台車Aのリフター5と各フォロワ台車Bのリフター5により車両4をリフトアップした状態で、リーダ台車Aが与えられた目標軌道に沿って移動していくと、各フォロワ台車Bは、前記リーダ台車A及び自分以外のフォロワ台車Bをまとめた一台の仮想リーダ台車A´の動きを推定しつつ追従することにより、前記リーダ台車Aと協調して車両4を移動させることが可能となり、無線通信による台車相互間でのリアルタイムの情報交換に基づく制御方法において、通信障害で情報が途切れたり遅れたりすることで、車両等の物体を落としたり、傷つけたりする心配もない。
【0046】
しかも、移動すべき物体がバス等のホイールベースの長い車両4や接地ポイントとしての車輪4aの数が多い車両4であったとしても、移動装置自体を大きくしたり、車輪4aの数に合わせた機構のものを別途用意しなくて済み、移動装置の種類を増やす必要がなくなると共に、移動装置が大型化しない分、移動経路や保管スペースを広くとる必要もない。
【0047】
尚、リーダ台車Aと各フォロワ台車Bとの間で車両4を介在させて搬送を行う際に、車両4の重量があまり重くない場合、前記リフトバー27の車輪支持ローラ25上で車両4の車輪4aが滑ってしまい、搬送に支障をきたす虞があるが、前記リフトバー27の車輪支持ローラ25表面には、ローレット加工、或いは滑り止め塗料の塗装といった滑り止め加工を施すようにしてあるため、仮に車両4が軽かったとしても、前記リフトバー27の車輪支持ローラ25上で車両4の車輪4aが滑ってしまうことが防止され、搬送に支障をきたす心配がない。
【0048】
こうして、無線通信のみによる台車相互間でのリアルタイムの情報交換を行うようにした協働搬送とは異なり、車両4を落としたり、傷つけたりする心配がなく、更に、大きさや接地ポイント数の異なる車両4にも装置の種類を増やすことなく対応し得、車両4を確実に且つより安定して移動させることができ、移動経路や保管スペースの削減をも図り得る。
【0049】
しかも、本実施例では、前記車輪4aの持ち上げ開始時にリフトバー27間の中心位置と車輪4aの中心位置とが一致していない場合でも、二本のリフトバー27間の中心位置で車輪4aを持ち上げることが可能となるため、構造を複雑化させることなく、リーダ台車A並びにフォロワ台車Bの台車本体2の幅方向中心位置で車両4をリフトアップしてバランス良く支持し得る。
【0050】
尚、本発明の物体移動装置は、上述の実施例にのみ限定されるものではなく、車両は四輪車に限らず、複数の車輪を持つ車両であればどのような車両にも適用可能なこと、又、駐車施設に限らず、駐車違反車両の移動やカーフェリー内での車両の移動等にも適用可能なこと、更に又、車両以外の物体にも適用可能なこと等、その他、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【符号の説明】
【0051】
1 走行駆動装置
2 台車本体
2a 台車フレーム
3 連結機構
4 車両(物体)
4a 車輪(接地ポイント)
5 リフター
6 走行車輪
13 ロードセル
18 車輪浮上支持装置
23 リフトバー開閉アクチュエータ
26 接地支持輪
27 リフトバー
31 リーダ制御部
32 フォロワ制御部
39 無線通信装置
40 無線通信装置
A リーダ台車
A´ 仮想リーダ台車
B フォロワ台車
【特許請求の範囲】
【請求項1】
走行駆動装置により全方向に自走可能な台車本体と、該台車本体に連結機構を介して取り付けられ且つ一対のリフトバーを接地ポイントが複数存在する物体の一つの接地ポイントの両側に配置して互いに近接させることにより、該物体の一つの接地ポイントをリフトアップするリフターとを有し、与えられた目標軌道に沿って移動可能なリーダ台車と、
走行駆動装置により全方向に自走可能な台車本体と、該台車本体に連結機構を介して取り付けられ且つ一対のリフトバーを前記物体の前記リーダ台車にてリフトアップされる接地ポイント以外の一つの接地ポイントの両側に配置して互いに近接させることにより、該物体の一つの接地ポイントをリフトアップするリフターとを有し、前記リーダ台車の動きを推定しつつ追従することにより、該リーダ台車と協調して物体を移動させるフォロワ台車とを備えた物体移動装置において、
前記一対のリフトバーを接地ポイントの両側から互いに近接させる際、一方のリフトバーが他方のリフトバーより先に接地ポイントに接触した場合、該一方のリフトバーが接地ポイントから受ける力に基づき、該力の作用する方向へ台車本体を移動させつつ前記一対のリフトバーを互いに近接させ、前記他方のリフトバーが接地ポイントに接触した時点で前記台車本体を停止させるよう構成したことを特徴とする物体移動装置。
【請求項1】
走行駆動装置により全方向に自走可能な台車本体と、該台車本体に連結機構を介して取り付けられ且つ一対のリフトバーを接地ポイントが複数存在する物体の一つの接地ポイントの両側に配置して互いに近接させることにより、該物体の一つの接地ポイントをリフトアップするリフターとを有し、与えられた目標軌道に沿って移動可能なリーダ台車と、
走行駆動装置により全方向に自走可能な台車本体と、該台車本体に連結機構を介して取り付けられ且つ一対のリフトバーを前記物体の前記リーダ台車にてリフトアップされる接地ポイント以外の一つの接地ポイントの両側に配置して互いに近接させることにより、該物体の一つの接地ポイントをリフトアップするリフターとを有し、前記リーダ台車の動きを推定しつつ追従することにより、該リーダ台車と協調して物体を移動させるフォロワ台車とを備えた物体移動装置において、
前記一対のリフトバーを接地ポイントの両側から互いに近接させる際、一方のリフトバーが他方のリフトバーより先に接地ポイントに接触した場合、該一方のリフトバーが接地ポイントから受ける力に基づき、該力の作用する方向へ台車本体を移動させつつ前記一対のリフトバーを互いに近接させ、前記他方のリフトバーが接地ポイントに接触した時点で前記台車本体を停止させるよう構成したことを特徴とする物体移動装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−121677(P2012−121677A)
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願番号】特願2010−273697(P2010−273697)
【出願日】平成22年12月8日(2010.12.8)
【出願人】(000198363)IHI運搬機械株式会社 (292)
【出願人】(504157024)国立大学法人東北大学 (2,297)
【Fターム(参考)】
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願日】平成22年12月8日(2010.12.8)
【出願人】(000198363)IHI運搬機械株式会社 (292)
【出願人】(504157024)国立大学法人東北大学 (2,297)
【Fターム(参考)】
[ Back to top ]