
物体識別装置、および物体識別プログラム
【課題】車両の周囲に存在する物体の種別を識別する物体識別装置において、物体を正確に識別できるようにする。
【解決手段】衝突防止システムにおいては、自車両の周囲に音波または電磁波を照射して該音波または電磁波の反射波を検出することによって得られた、反射強度および自車両周囲の物体までの距離の情報を含む物体情報を取得し(S110)、物体の高さの情報を取得する(S130)。そして、物体の高さおよび物体までの距離に応じて反射強度を補正し(S140)、補正後の反射強度に応じて物体の種別を識別する(S170〜S280)。よって、反射強度を正常に検出することを妨害する要素を除外するように反射強度を補正することができ、正確に反射強度を検出できるようにすることで、物体を正確に識別することができる。
【解決手段】衝突防止システムにおいては、自車両の周囲に音波または電磁波を照射して該音波または電磁波の反射波を検出することによって得られた、反射強度および自車両周囲の物体までの距離の情報を含む物体情報を取得し(S110)、物体の高さの情報を取得する(S130)。そして、物体の高さおよび物体までの距離に応じて反射強度を補正し(S140)、補正後の反射強度に応じて物体の種別を識別する(S170〜S280)。よって、反射強度を正常に検出することを妨害する要素を除外するように反射強度を補正することができ、正確に反射強度を検出できるようにすることで、物体を正確に識別することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の周囲に存在する物体の種別を識別する物体識別装置、および物体識別プログラムに関する。
【背景技術】
【0002】
車両の周囲に存在する物体の種別を識別する物体識別装置として、レーダにて検出される反射波の反射強度(以下、単に「反射強度」という。)と、物体の幅とに基づいて物体の種別を識別するものが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−002817号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の装置では、反射強度をそのまま利用して物体を識別するが、同じ物体からの反射波であっても距離に応じて反射強度が変化するため、反射強度をそのまま利用する構成では物体を正確に識別できない虞があった。
【0005】
そこで、このような問題点を鑑み、車両の周囲に存在する物体の種別を識別する物体識別装置、および物体識別プログラムにおいて、物体を正確に識別できるようにすることを本発明の目的とする。
【課題を解決するための手段】
【0006】
かかる目的を達成するために成された第1の構成の物体識別装置において、物体情報取得手段は、自車両の周囲に音波または電磁波を照射して該音波または電磁波の反射波を検出することによって得られた、反射強度および自車両周囲の物体までの距離の情報を含む物体情報を取得し、物体高取得手段は、物体の高さの情報を取得する。そして、強度補正手段は、物体の高さおよび物体までの距離に応じて反射強度を補正し、識別手段は、補正後の反射強度に応じて物体の種別を識別する。
【0007】
このような物体識別装置によれば、反射強度を正常に検出することを妨害する要素を除外するように反射強度を補正することができる。ここで、物体の種別に応じて音波や電磁波の反射強度が異なることが知られているため、本発明では、正確に反射強度を検出できるようにすることで、物体を正確に識別することができる。
【0008】
また、上記物体識別装置においては、第2の構成のように、強度補正手段は、物体までの距離と物体の高さとに応じて反射波のマルチパスの影響を除去する補正を行うようにしてもよい。
【0009】
このような物体識別装置によれば、反射強度を正常に検出することを妨害するパラメータとしてのマルチパスの影響を除去することができる。
なお、反射強度を正常に検出することを妨害する他のパラメータとしては、反射面の向き等が挙げられる。
【0010】
さらに、上記物体識別装置においては、第3の構成のように、物体高取得手段は、物体情報を検出するための手法とは異なる手法を利用して検出された物体の高さの情報を取得するようにしてもよい。特に、第4の構成のように、物体高取得手段は、画像処理によって検出された物体の高さを取得するようにしてもよい。
【0011】
このような物体識別装置によれば、物体情報を検出するための手法と同じ手法で物体高さを検出する構成と比較して、物体高さの情報をより正確に検出することができる。
なお、物体高さの情報を取得する際には、物体や物体に付随する施設と通信を行うことにより、物体高さの情報を取得するようにしてもよい。
【0012】
また、上記物体識別装置においては、第5の構成のように、識別手段は、反射強度が、車両を識別するための車両識別範囲内である場合に物体の種別が車両であると識別するようにしてもよい。
【0013】
このような物体識別装置によれば、物体の種別が車両であることを識別することができる。
さらに、上記物体識別装置においては、第6の構成のように、識別手段は、反射強度が、歩行者を識別するために車両識別範囲の下限値未満の範囲に設定された歩行者識別範囲内である場合に物体の種別が歩行者であると識別するようにしてもよい。
【0014】
このような物体識別装置によれば、歩行者による反射強度が車両による反射強度よりも小さいことを鑑みながら、物体の種別が歩行者であることを識別することができる。
また、上記物体識別装置においては、第7の構成のように、物体情報取得手段は、繰り返し物体情報を取得し、識別手段は、反射強度が歩行者識別範囲内であって、かつ反射強度が基準変動幅以上変動している場合に、物体の種別が歩行者であると識別するようにしてもよい。
【0015】
すなわち、反射強度が歩行者識別範囲内である場合であっても、物体の種別が歩行者でない場合があることを考慮して、反射強度が変化するか否かについても物体の種別が歩行者であるか否かを識別する際の条件としている。歩行者は手や足を動かしながら歩行するため、反射面の面積が変化し、反射強度が変化するからである。
【0016】
このような物体識別装置によれば、物体の種別が歩行者であるか否かをより精度よく識別することができる。
さらに、上記物体識別装置においては、第8の構成のように、物体の識別結果に応じた報知を行う報知部、を備えていてもよい。
【0017】
このような物体識別装置によれば、物体の種別に応じた報知を行うことができる。
また、上記目的を達成するため成された第9の構成としての物体識別プログラムは、コンピュータを、上記物体識別装置を構成する各手段として機能させるためのプログラムであることを特徴としている。
【0018】
このような物体識別プログラムによれば、上記物体識別装置と同様の効果を享受することができる。
【図面の簡単な説明】
【0019】
【図1】衝突防止システム1の概略構成を示すブロック図である。
【図2】識別処理を示すフローチャートである。
【図3】物標までの距離と反射強度との関係を示すグラフである。
【図4】反射強度を演算する際の数式の一例を示す説明図である。
【図5】車両および歩行者までの距離と反射強度との関係をそれぞれ示すグラフである。
【発明を実施するための形態】
【0020】
以下に本発明にかかる実施の形態を図面と共に説明する。
[本実施形態の構成]
図1は本発明が適用された衝突防止システム1の概略構成を示すブロック図である。衝突防止システム1は、例えば乗用車等の車両に搭載され、このシステム1が搭載された車両(自車両)と自車両外部の物体(物標)とが衝突する虞があるか否かを検出し、衝突する虞があると判断した場合に、衝突回避制御や警報を行うシステムである。
【0021】
特に、衝突防止システム1では、自車両と物標とが衝突する虞があるか否かを検出する際に、自車両の進行方向に存在する物標を識別する。つまり、物標が車両であるか、歩行者であるか等、物標の種別を特定する。
【0022】
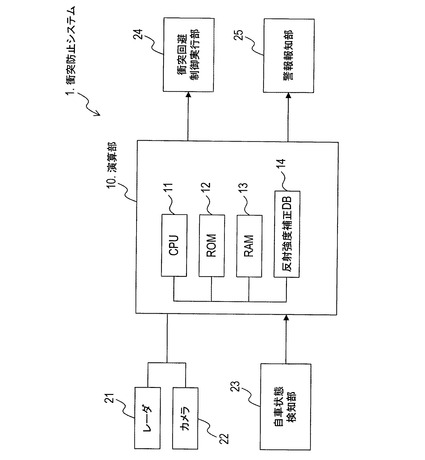
詳細には図1に示すように、衝突防止システム1は、演算部10(物体識別装置)と、レーダ21と、カメラ22と、自車状態検知部23と、衝突回避制御実行部24と、警報報知部25(報知部)と、を備えている。
【0023】
レーダ21は、例えば、周知のレーダ装置としての機能を備えており、ミリ波等の電磁波からなる送信波を自車両の進行方向に送信し、その反射波を受信する作動を繰り返すことにより物標の自車両に対する相対移動ベクトル(位置、速度、方向)、および物標による反射波の強度(反射強度)を検出する。そして、レーダ21は、得られた検出結果を演算部10に送る。
【0024】
また、カメラ22は、レーダ21による物標の検出可能領域を撮像し、得られた撮像画像を演算部10に送る。
また、自車状態検知部23は、周知の速度センサや舵角センサ等(図示省略)を備え、少なくとも自車両の速度の情報と自車両の舵角の情報とを演算部10に送る。
【0025】
衝突回避制御実行部24は、自車両のブレーキ油圧やアクセル開度、或いはシートベルトの張力を制御する機能を有し、演算部10から衝突回避制御を実施するよう指示を受けると、自車両の加速を抑制したり、自車両を減速させたり、或いは衝撃の影響を軽減するために自車両の運転者をシートベルトで拘束したりする。
【0026】
警報報知部25は、図示しないディスプレイやスピーカを備えており、演算部10から警報を実施するよう指示を受けると、ディスプレイに画像を表示させたり、スピーカから音(音声を含む)を出力させたりすることにより、自車両の運転者に対して警報等の報知を行う。
【0027】
演算部10は、CPU11、ROM12、RAM13等を備えた周知のマイコンとして構成されている。また、演算部10は、反射強度補正データベース(DB)14を備えている。
【0028】
反射強度補正DB14には、レーダ21による反射強度を補正するためのデータベースであって、物標までの距離と物標の高さとを入力すると、反射強度の補正量が得られるようなマップが記録されている。
【0029】
CPU11は、ROM12に格納されたプログラムやRAM13にロードされたプログラム、およびレーダ21、カメラ22、自車状態検知部23等による検知結果を利用して、後述する各種処理を実行する。ここで、各種処理には、自車両の進行方向に存在する物体の種別を特定する識別処理(物体識別プログラム)、自車両と識別した物体との相対移動ベクトル等を利用して自車両と物体とが衝突する確度を演算する確度演算処理、物体との衝突する確度が一定以上の場合に衝突を回避するための制動や操舵或いは報知を衝突回避制御実行部24や警報報知部25に実施させる衝突回避処理、を含む。
【0030】
なお、各種処理のうちの確度演算処理および衝突回避処理については、物体の種別に応じて異なる確度を求める、或いは異なる報知を行う等の処理を実行することができるが、基本的には周知の処理を用いることができるため詳細な説明については省略し、本実施形態では識別処理について詳細に説明する。
【0031】
[本実施形態の処理]
図2は演算部10のCPU11が実行する識別処理を示すフローチャートである。
識別処理は、図示しないイグニッションスイッチ等の車両の電源が投入されると開始され、その後、所定周期(例えば100ms毎)に繰り返し実施される処理である。認識処理では、図2に示すように、まず、レーダ21による検出結果を取得する(S110:物体情報取得手段)。
【0032】
この処理では、自車両の周囲に音波または電磁波を照射して該音波または電磁波の反射波を検出することによって得られた、反射強度および自車両周囲の物標(物体)までの距離の情報を含む物体情報を取得する。
【0033】
続いて、カメラ22による撮像画像を取得し(S120)、物標の高さを演算する(S130:物体高取得手段)。ここで、S130の処理では、レーダ21によって検出された物標の位置に対応する物標を撮像画像中から抽出し、この撮像画像中の物標の見える部分の面積(反射断面積)、および鉛直方向の大きさ(物標の高さ)を演算する。このとき、物標までの距離を利用して、撮像画像中の物標の大きさを特定する。
【0034】
このようにS130の処理では、物体情報を検出するための手法(レーダ21)とは異なる手法(カメラ22からの撮像画像を利用した画像処理)を利用して物標の高さの情報を演算することになる。
【0035】
続いて、物標の高さと物標までの距離とに応じて反射強度を補正し、補正後の反射強度をRAM13等のメモリに記録する(S140:強度補正手段)。なお、この補正後の反射強度は、一定時間分(例えば1秒間分)蓄積される。また、この処理では、反射強度補正DB14を利用して反射強度の補正量を求め、反射強度に対して補正量を加減算することにより補正後の反射強度を得る。
【0036】
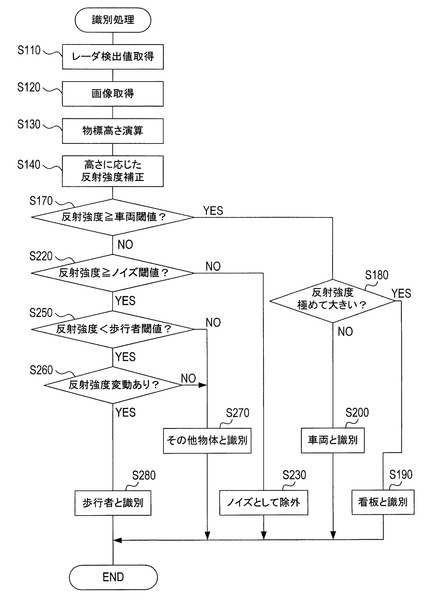
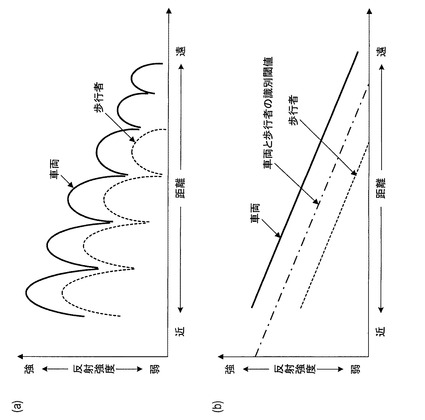
ここで、反射強度補正DB14において、物標までの距離および物標の高さと反射強度の補正量との関係は、例えば、次のようにして設定される。図3は物標までの距離と反射強度との関係を示すグラフであり、特に、図3(a)は補正前の反射強度を示すもの、図3(b)は補正後の反射強度を示すものである。
【0037】
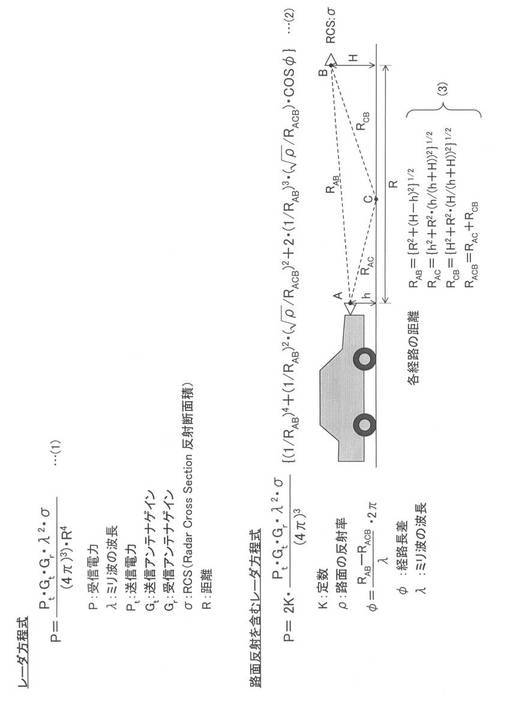
なお、図3(a)において、実線は比較的物標の高さが高いものにおける反射強度を示し、破線は比較的物標の高さが低いものにおける反射強度を示し、実線および破線で示す物標の反射強度は、高さのみが異なり、同じ種別の物標からのものを示す。また図4は、反射強度を演算する際の数式の一例を示す説明図である。
【0038】
図3(a)に示すように、物標の高さに応じて反射強度の変動幅が異なり、物標までの距離が変化すると反射強度は一定の範囲内で増減を繰り返すことが分かる。また、物標の高さが高くなるにつれて反射強度の変動幅が大きくなる傾向があることが分かる。
【0039】
ここで、反射強度(受信電力P)は、一般的には図4に示す式(1)で表すことができるが、物標までの距離が変化すると反射強度が一定の範囲内で増減を繰り返すことから、反射強度が変化する原因の1つとしては、複数の方向から電波が受信されるマルチパスの影響が考えられる。なお、図4に示す式(1)において、Pは受信電力、λはレーダ波(ミリ波)の波長、Ptは送信電力、Gtは送信アンテナゲイン、σは反射断面積、Rは物標までの距離を示す。
【0040】
さて、マルチパスの影響を考慮する場合には、図4に示す式(2)を利用して反射強度を求める。なお、式(2)において、Kは定数、ρは路面の反射率、φは経路長差である。また、式(2)中で利用されている各経路長(RAB、RAC、RCB、RACB)の詳細については、式(3)で示す。
【0041】
式(2)で求められた反射強度(受信電力P)のうち、路面を反射して得られる反射強度の成分(RACB経由で得られる受信電力)を、補正量とすることができる。この場合には、検出された反射強度からこの補正量(路面を反射して得られる反射強度の成分)を減算することでマルチパスの影響を除去した補正後の反射強度を得る。
【0042】
ここで、補正後の反射強度では、図3(b)に示すように、同じ種別の物標であれば、物標の高さにかかわらず、同じ反射強度となる。ただし、物標までの距離が遠くなるに従って、反射強度は弱くなる。
【0043】
このように、マルチパス等の反射強度に影響を与えるパラメータを考慮して、反射強度DB14におけるマップが設定されている。
続いて、図2に戻り、補正後の反射強度に応じて物体の種別を識別する(S170〜S280:識別手段)。この処理の要旨について図5に示す。図5は車両および歩行者までの距離と反射強度との関係をそれぞれ示すグラフである。ただし、図5においては、車両および歩行者は同じ高さに設定されている。特に図5(a)は補正前の反射強度を示すもの、図5(b)は補正後の反射強度を示すものである。
【0044】
図5(a)に示すように、同じ距離において車両による反射強度は歩行者による反射強度よりも大きくなっている。そこで、このような特性を利用して、車両および歩行者を含む物標の種別を識別する。ただし、自車両と物標との距離に応じて反射強度が変化し、図5(a)に示すように、車両による反射強度の極小値は歩行者による反射強度の極大値よりも小さくなることがある。このため、このまま反射強度を利用する場合には、車両と歩行者とを識別することが難しい。
【0045】
そこで、上記S140による処理を実施しておくと、図5(b)に示すような反射強度が得られ、物標までの距離と反射強度との関係を一次関数で表すことができる。この場合、車両による反射強度と歩行者による反射強度との中間の位置に一次関数で示される閾値(車両閾値および車両閾値と一致する歩行者閾値)を設けることで、容易に車両と歩行者とを識別することができるようになる。
【0046】
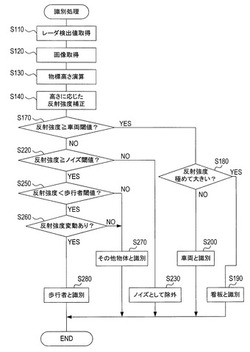
詳細な処理について以下に説明する(図2参照)。まず、補正後の反射強度と車両閾値とを比較する(S170)。補正後の反射強度が車両閾値以上であれば(S170:YES)、反射強度が極めて大きいか否かを、反射強度が車両閾値よりも大きな値に設定された看板閾値以上であるか否かによって判定する(S180)。
【0047】
反射強度が看板閾値以上であれば(S180:YES)、物標の種別が看板であると識別して識別結果をRAM13等のメモリに記録し(S190)、識別処理を終了する。また、反射強度が看板閾値未満であれば(S180:NO)、物標の種別が車両であると識別して識別結果をRAM13等のメモリに記録し(S200)、識別処理を終了する。
【0048】
また、S170の処理にて、補正後の反射強度が車両閾値未満であれば(S170:NO)、補正後の反射強度と車両閾値や後述する歩行者閾値よりも小さな値に設定されたノイズ閾値とを比較する(S220)。補正後の反射強度がノイズ閾値未満であれば(S220:NO)、この物標をノイズとして除外し(S230)、識別処理を終了する。
【0049】
また、補正後の反射強度がノイズ閾値以上であれば(S220:YES)、補正後の反射強度と歩行者閾値とを比較する(S250)。なお、本実施形態において歩行者閾値は車両閾値と一致する値としているが、車両閾値未満の値に設定されていてもよい。
【0050】
補正後の反射強度が歩行者閾値以上であれば(S250:YES)、補正後の反射強度の変動があるか否かを判定する(S260)。この処理においては、過去において検出された反射強度に対して、最新の反射強度と同じ距離における反射強度となるようにさらに補正を行い、この補正後の反射強度と、最新の反射強度とを比較することによって変動閾値以上の反射強度の変化(例えば1割程度以上の反射強度の変化)があるか否かを判定する。すなわち、反射強度が歩行者閾値未満である場合(歩行者識別範囲内である場合)であっても、物体の種別が歩行者でない場合があることを考慮して、反射強度が変化するか否かについても物体の種別が歩行者であるか否かを識別する際の条件としている。歩行者は手や足を動かしながら歩行するため、反射面の面積が変化し、反射強度が変化するからである。
【0051】
変動閾値以上の反射強度の変化がない場合(S260:NO)、或いは、S250の処理にて、補正後の反射強度が歩行者閾値未満である場合(S250:NO)には、物標の種別を、車両でも歩行者でもないもの(例えば街路樹等)として識別して識別結果をRAM13等のメモリに記録し(S270)、識別処理を終了する。
【0052】
また、変動閾値以上の反射強度の変化がある場合には(S260:YES)、物標の種別が歩行者であると識別して識別結果をRAM13等のメモリに記録し(S280)、識別処理を終了する。
【0053】
[本実施形態による効果]
以上のように詳述した衝突防止システム1において、演算部10のCPU11は、自車両の周囲に電磁波を照射して該電磁波の反射波を検出することによって得られた、反射強度および自車両周囲の物体までの距離の情報を含む物体情報を取得し、物体の高さの情報を取得する。そして、CPU11は、物体の高さおよび物体までの距離に応じて反射強度を補正し、補正後の反射強度に応じて物体の種別を識別する。
【0054】
このような衝突防止システム1によれば、反射強度を正常に検出することを妨害する要素を除外するように反射強度を補正することができる。ここで、物体の種別に応じて電磁波の反射強度が異なることが知られているため、上記実施形態では、正確に反射強度を検出できるようにすることで、物体を正確に識別することができる。
【0055】
また、上記衝突防止システム1においてCPU11は、物体までの距離と物体の高さとに応じて反射波のマルチパスの影響を除去する補正を行う。
このような衝突防止システム1によれば、反射強度を正常に検出することを妨害するパラメータとしてのマルチパスの影響を除去することができる。なお、反射強度を正常に検出することを妨害する他のパラメータとしては、反射面の向き等が挙げられる。
【0056】
また、上記衝突防止システム1においてCPU11は、反射強度が、車両を識別するための車両識別範囲内である場合に物体の種別が車両であると識別し、反射強度が、歩行者を識別するために車両識別範囲の下限値未満の範囲に設定された歩行者識別範囲内である場合に物体の種別が歩行者であると識別する。
【0057】
このような衝突防止システム1によれば、物体の種別が車両であることを識別することができる。また、歩行者による反射強度が車両による反射強度よりも小さいことを鑑みながら、物体の種別が歩行者であることを識別することができる。
【0058】
また、上記衝突防止システム1においてCPU11は、繰り返し物体情報を取得し、反射強度が歩行者識別範囲内であって、かつ反射強度が基準変動幅以上変動している場合に、物体の種別が歩行者であると識別する。
【0059】
このような衝突防止システム1によれば、物体の種別が歩行者であるか否かをより精度よく識別することができる。
さらに、上記衝突防止システム1においては、物体と衝突する虞がある場合に、物体の識別結果に応じた報知を行う警報報知部25を備えている。
【0060】
このような衝突防止システム1によれば、物体の種別に応じた報知を行うことができる。
[その他の実施形態]
本発明の実施の形態は、上記の実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態を採りうる。
【0061】
例えば、上記実施形態において、上記実施形態において物体高さの情報を取得する際には、画像処理によって検出された物体の高さを取得するよう構成したが、物体や物体に付随する施設と通信を行うことにより、物体高さの情報を取得するよう構成してもよい。
【0062】
また、上記衝突防止システム1においては、画像処理によって物体の高さを検出するよう構成したが、他の手法を利用して物体の高さを検出するようにしてもよい。
さらに、上記実施形態においては、物体と衝突する虞がある場合に物体の種別に応じて報知を行うよう構成したが、物体と衝突するか否かに拘わらず、単に物体の種別に応じて報知を行うようにしてもよい。
【0063】
また、上記実施絵形態においては、電磁波による反射波を検出するよう構成したが、音波等の反射波を検出するよう構成してもよい。
【符号の説明】
【0064】
1…衝突防止システム、10…演算部、11…CPU、12…ROM、13…RAM、14…反射強度補正DB、21…レーダ、22…カメラ、23…自車状態検知部、24…衝突回避制御実行部、25…警報報知部。
【技術分野】
【0001】
本発明は、車両の周囲に存在する物体の種別を識別する物体識別装置、および物体識別プログラムに関する。
【背景技術】
【0002】
車両の周囲に存在する物体の種別を識別する物体識別装置として、レーダにて検出される反射波の反射強度(以下、単に「反射強度」という。)と、物体の幅とに基づいて物体の種別を識別するものが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−002817号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の装置では、反射強度をそのまま利用して物体を識別するが、同じ物体からの反射波であっても距離に応じて反射強度が変化するため、反射強度をそのまま利用する構成では物体を正確に識別できない虞があった。
【0005】
そこで、このような問題点を鑑み、車両の周囲に存在する物体の種別を識別する物体識別装置、および物体識別プログラムにおいて、物体を正確に識別できるようにすることを本発明の目的とする。
【課題を解決するための手段】
【0006】
かかる目的を達成するために成された第1の構成の物体識別装置において、物体情報取得手段は、自車両の周囲に音波または電磁波を照射して該音波または電磁波の反射波を検出することによって得られた、反射強度および自車両周囲の物体までの距離の情報を含む物体情報を取得し、物体高取得手段は、物体の高さの情報を取得する。そして、強度補正手段は、物体の高さおよび物体までの距離に応じて反射強度を補正し、識別手段は、補正後の反射強度に応じて物体の種別を識別する。
【0007】
このような物体識別装置によれば、反射強度を正常に検出することを妨害する要素を除外するように反射強度を補正することができる。ここで、物体の種別に応じて音波や電磁波の反射強度が異なることが知られているため、本発明では、正確に反射強度を検出できるようにすることで、物体を正確に識別することができる。
【0008】
また、上記物体識別装置においては、第2の構成のように、強度補正手段は、物体までの距離と物体の高さとに応じて反射波のマルチパスの影響を除去する補正を行うようにしてもよい。
【0009】
このような物体識別装置によれば、反射強度を正常に検出することを妨害するパラメータとしてのマルチパスの影響を除去することができる。
なお、反射強度を正常に検出することを妨害する他のパラメータとしては、反射面の向き等が挙げられる。
【0010】
さらに、上記物体識別装置においては、第3の構成のように、物体高取得手段は、物体情報を検出するための手法とは異なる手法を利用して検出された物体の高さの情報を取得するようにしてもよい。特に、第4の構成のように、物体高取得手段は、画像処理によって検出された物体の高さを取得するようにしてもよい。
【0011】
このような物体識別装置によれば、物体情報を検出するための手法と同じ手法で物体高さを検出する構成と比較して、物体高さの情報をより正確に検出することができる。
なお、物体高さの情報を取得する際には、物体や物体に付随する施設と通信を行うことにより、物体高さの情報を取得するようにしてもよい。
【0012】
また、上記物体識別装置においては、第5の構成のように、識別手段は、反射強度が、車両を識別するための車両識別範囲内である場合に物体の種別が車両であると識別するようにしてもよい。
【0013】
このような物体識別装置によれば、物体の種別が車両であることを識別することができる。
さらに、上記物体識別装置においては、第6の構成のように、識別手段は、反射強度が、歩行者を識別するために車両識別範囲の下限値未満の範囲に設定された歩行者識別範囲内である場合に物体の種別が歩行者であると識別するようにしてもよい。
【0014】
このような物体識別装置によれば、歩行者による反射強度が車両による反射強度よりも小さいことを鑑みながら、物体の種別が歩行者であることを識別することができる。
また、上記物体識別装置においては、第7の構成のように、物体情報取得手段は、繰り返し物体情報を取得し、識別手段は、反射強度が歩行者識別範囲内であって、かつ反射強度が基準変動幅以上変動している場合に、物体の種別が歩行者であると識別するようにしてもよい。
【0015】
すなわち、反射強度が歩行者識別範囲内である場合であっても、物体の種別が歩行者でない場合があることを考慮して、反射強度が変化するか否かについても物体の種別が歩行者であるか否かを識別する際の条件としている。歩行者は手や足を動かしながら歩行するため、反射面の面積が変化し、反射強度が変化するからである。
【0016】
このような物体識別装置によれば、物体の種別が歩行者であるか否かをより精度よく識別することができる。
さらに、上記物体識別装置においては、第8の構成のように、物体の識別結果に応じた報知を行う報知部、を備えていてもよい。
【0017】
このような物体識別装置によれば、物体の種別に応じた報知を行うことができる。
また、上記目的を達成するため成された第9の構成としての物体識別プログラムは、コンピュータを、上記物体識別装置を構成する各手段として機能させるためのプログラムであることを特徴としている。
【0018】
このような物体識別プログラムによれば、上記物体識別装置と同様の効果を享受することができる。
【図面の簡単な説明】
【0019】
【図1】衝突防止システム1の概略構成を示すブロック図である。
【図2】識別処理を示すフローチャートである。
【図3】物標までの距離と反射強度との関係を示すグラフである。
【図4】反射強度を演算する際の数式の一例を示す説明図である。
【図5】車両および歩行者までの距離と反射強度との関係をそれぞれ示すグラフである。
【発明を実施するための形態】
【0020】
以下に本発明にかかる実施の形態を図面と共に説明する。
[本実施形態の構成]
図1は本発明が適用された衝突防止システム1の概略構成を示すブロック図である。衝突防止システム1は、例えば乗用車等の車両に搭載され、このシステム1が搭載された車両(自車両)と自車両外部の物体(物標)とが衝突する虞があるか否かを検出し、衝突する虞があると判断した場合に、衝突回避制御や警報を行うシステムである。
【0021】
特に、衝突防止システム1では、自車両と物標とが衝突する虞があるか否かを検出する際に、自車両の進行方向に存在する物標を識別する。つまり、物標が車両であるか、歩行者であるか等、物標の種別を特定する。
【0022】
詳細には図1に示すように、衝突防止システム1は、演算部10(物体識別装置)と、レーダ21と、カメラ22と、自車状態検知部23と、衝突回避制御実行部24と、警報報知部25(報知部)と、を備えている。
【0023】
レーダ21は、例えば、周知のレーダ装置としての機能を備えており、ミリ波等の電磁波からなる送信波を自車両の進行方向に送信し、その反射波を受信する作動を繰り返すことにより物標の自車両に対する相対移動ベクトル(位置、速度、方向)、および物標による反射波の強度(反射強度)を検出する。そして、レーダ21は、得られた検出結果を演算部10に送る。
【0024】
また、カメラ22は、レーダ21による物標の検出可能領域を撮像し、得られた撮像画像を演算部10に送る。
また、自車状態検知部23は、周知の速度センサや舵角センサ等(図示省略)を備え、少なくとも自車両の速度の情報と自車両の舵角の情報とを演算部10に送る。
【0025】
衝突回避制御実行部24は、自車両のブレーキ油圧やアクセル開度、或いはシートベルトの張力を制御する機能を有し、演算部10から衝突回避制御を実施するよう指示を受けると、自車両の加速を抑制したり、自車両を減速させたり、或いは衝撃の影響を軽減するために自車両の運転者をシートベルトで拘束したりする。
【0026】
警報報知部25は、図示しないディスプレイやスピーカを備えており、演算部10から警報を実施するよう指示を受けると、ディスプレイに画像を表示させたり、スピーカから音(音声を含む)を出力させたりすることにより、自車両の運転者に対して警報等の報知を行う。
【0027】
演算部10は、CPU11、ROM12、RAM13等を備えた周知のマイコンとして構成されている。また、演算部10は、反射強度補正データベース(DB)14を備えている。
【0028】
反射強度補正DB14には、レーダ21による反射強度を補正するためのデータベースであって、物標までの距離と物標の高さとを入力すると、反射強度の補正量が得られるようなマップが記録されている。
【0029】
CPU11は、ROM12に格納されたプログラムやRAM13にロードされたプログラム、およびレーダ21、カメラ22、自車状態検知部23等による検知結果を利用して、後述する各種処理を実行する。ここで、各種処理には、自車両の進行方向に存在する物体の種別を特定する識別処理(物体識別プログラム)、自車両と識別した物体との相対移動ベクトル等を利用して自車両と物体とが衝突する確度を演算する確度演算処理、物体との衝突する確度が一定以上の場合に衝突を回避するための制動や操舵或いは報知を衝突回避制御実行部24や警報報知部25に実施させる衝突回避処理、を含む。
【0030】
なお、各種処理のうちの確度演算処理および衝突回避処理については、物体の種別に応じて異なる確度を求める、或いは異なる報知を行う等の処理を実行することができるが、基本的には周知の処理を用いることができるため詳細な説明については省略し、本実施形態では識別処理について詳細に説明する。
【0031】
[本実施形態の処理]
図2は演算部10のCPU11が実行する識別処理を示すフローチャートである。
識別処理は、図示しないイグニッションスイッチ等の車両の電源が投入されると開始され、その後、所定周期(例えば100ms毎)に繰り返し実施される処理である。認識処理では、図2に示すように、まず、レーダ21による検出結果を取得する(S110:物体情報取得手段)。
【0032】
この処理では、自車両の周囲に音波または電磁波を照射して該音波または電磁波の反射波を検出することによって得られた、反射強度および自車両周囲の物標(物体)までの距離の情報を含む物体情報を取得する。
【0033】
続いて、カメラ22による撮像画像を取得し(S120)、物標の高さを演算する(S130:物体高取得手段)。ここで、S130の処理では、レーダ21によって検出された物標の位置に対応する物標を撮像画像中から抽出し、この撮像画像中の物標の見える部分の面積(反射断面積)、および鉛直方向の大きさ(物標の高さ)を演算する。このとき、物標までの距離を利用して、撮像画像中の物標の大きさを特定する。
【0034】
このようにS130の処理では、物体情報を検出するための手法(レーダ21)とは異なる手法(カメラ22からの撮像画像を利用した画像処理)を利用して物標の高さの情報を演算することになる。
【0035】
続いて、物標の高さと物標までの距離とに応じて反射強度を補正し、補正後の反射強度をRAM13等のメモリに記録する(S140:強度補正手段)。なお、この補正後の反射強度は、一定時間分(例えば1秒間分)蓄積される。また、この処理では、反射強度補正DB14を利用して反射強度の補正量を求め、反射強度に対して補正量を加減算することにより補正後の反射強度を得る。
【0036】
ここで、反射強度補正DB14において、物標までの距離および物標の高さと反射強度の補正量との関係は、例えば、次のようにして設定される。図3は物標までの距離と反射強度との関係を示すグラフであり、特に、図3(a)は補正前の反射強度を示すもの、図3(b)は補正後の反射強度を示すものである。
【0037】
なお、図3(a)において、実線は比較的物標の高さが高いものにおける反射強度を示し、破線は比較的物標の高さが低いものにおける反射強度を示し、実線および破線で示す物標の反射強度は、高さのみが異なり、同じ種別の物標からのものを示す。また図4は、反射強度を演算する際の数式の一例を示す説明図である。
【0038】
図3(a)に示すように、物標の高さに応じて反射強度の変動幅が異なり、物標までの距離が変化すると反射強度は一定の範囲内で増減を繰り返すことが分かる。また、物標の高さが高くなるにつれて反射強度の変動幅が大きくなる傾向があることが分かる。
【0039】
ここで、反射強度(受信電力P)は、一般的には図4に示す式(1)で表すことができるが、物標までの距離が変化すると反射強度が一定の範囲内で増減を繰り返すことから、反射強度が変化する原因の1つとしては、複数の方向から電波が受信されるマルチパスの影響が考えられる。なお、図4に示す式(1)において、Pは受信電力、λはレーダ波(ミリ波)の波長、Ptは送信電力、Gtは送信アンテナゲイン、σは反射断面積、Rは物標までの距離を示す。
【0040】
さて、マルチパスの影響を考慮する場合には、図4に示す式(2)を利用して反射強度を求める。なお、式(2)において、Kは定数、ρは路面の反射率、φは経路長差である。また、式(2)中で利用されている各経路長(RAB、RAC、RCB、RACB)の詳細については、式(3)で示す。
【0041】
式(2)で求められた反射強度(受信電力P)のうち、路面を反射して得られる反射強度の成分(RACB経由で得られる受信電力)を、補正量とすることができる。この場合には、検出された反射強度からこの補正量(路面を反射して得られる反射強度の成分)を減算することでマルチパスの影響を除去した補正後の反射強度を得る。
【0042】
ここで、補正後の反射強度では、図3(b)に示すように、同じ種別の物標であれば、物標の高さにかかわらず、同じ反射強度となる。ただし、物標までの距離が遠くなるに従って、反射強度は弱くなる。
【0043】
このように、マルチパス等の反射強度に影響を与えるパラメータを考慮して、反射強度DB14におけるマップが設定されている。
続いて、図2に戻り、補正後の反射強度に応じて物体の種別を識別する(S170〜S280:識別手段)。この処理の要旨について図5に示す。図5は車両および歩行者までの距離と反射強度との関係をそれぞれ示すグラフである。ただし、図5においては、車両および歩行者は同じ高さに設定されている。特に図5(a)は補正前の反射強度を示すもの、図5(b)は補正後の反射強度を示すものである。
【0044】
図5(a)に示すように、同じ距離において車両による反射強度は歩行者による反射強度よりも大きくなっている。そこで、このような特性を利用して、車両および歩行者を含む物標の種別を識別する。ただし、自車両と物標との距離に応じて反射強度が変化し、図5(a)に示すように、車両による反射強度の極小値は歩行者による反射強度の極大値よりも小さくなることがある。このため、このまま反射強度を利用する場合には、車両と歩行者とを識別することが難しい。
【0045】
そこで、上記S140による処理を実施しておくと、図5(b)に示すような反射強度が得られ、物標までの距離と反射強度との関係を一次関数で表すことができる。この場合、車両による反射強度と歩行者による反射強度との中間の位置に一次関数で示される閾値(車両閾値および車両閾値と一致する歩行者閾値)を設けることで、容易に車両と歩行者とを識別することができるようになる。
【0046】
詳細な処理について以下に説明する(図2参照)。まず、補正後の反射強度と車両閾値とを比較する(S170)。補正後の反射強度が車両閾値以上であれば(S170:YES)、反射強度が極めて大きいか否かを、反射強度が車両閾値よりも大きな値に設定された看板閾値以上であるか否かによって判定する(S180)。
【0047】
反射強度が看板閾値以上であれば(S180:YES)、物標の種別が看板であると識別して識別結果をRAM13等のメモリに記録し(S190)、識別処理を終了する。また、反射強度が看板閾値未満であれば(S180:NO)、物標の種別が車両であると識別して識別結果をRAM13等のメモリに記録し(S200)、識別処理を終了する。
【0048】
また、S170の処理にて、補正後の反射強度が車両閾値未満であれば(S170:NO)、補正後の反射強度と車両閾値や後述する歩行者閾値よりも小さな値に設定されたノイズ閾値とを比較する(S220)。補正後の反射強度がノイズ閾値未満であれば(S220:NO)、この物標をノイズとして除外し(S230)、識別処理を終了する。
【0049】
また、補正後の反射強度がノイズ閾値以上であれば(S220:YES)、補正後の反射強度と歩行者閾値とを比較する(S250)。なお、本実施形態において歩行者閾値は車両閾値と一致する値としているが、車両閾値未満の値に設定されていてもよい。
【0050】
補正後の反射強度が歩行者閾値以上であれば(S250:YES)、補正後の反射強度の変動があるか否かを判定する(S260)。この処理においては、過去において検出された反射強度に対して、最新の反射強度と同じ距離における反射強度となるようにさらに補正を行い、この補正後の反射強度と、最新の反射強度とを比較することによって変動閾値以上の反射強度の変化(例えば1割程度以上の反射強度の変化)があるか否かを判定する。すなわち、反射強度が歩行者閾値未満である場合(歩行者識別範囲内である場合)であっても、物体の種別が歩行者でない場合があることを考慮して、反射強度が変化するか否かについても物体の種別が歩行者であるか否かを識別する際の条件としている。歩行者は手や足を動かしながら歩行するため、反射面の面積が変化し、反射強度が変化するからである。
【0051】
変動閾値以上の反射強度の変化がない場合(S260:NO)、或いは、S250の処理にて、補正後の反射強度が歩行者閾値未満である場合(S250:NO)には、物標の種別を、車両でも歩行者でもないもの(例えば街路樹等)として識別して識別結果をRAM13等のメモリに記録し(S270)、識別処理を終了する。
【0052】
また、変動閾値以上の反射強度の変化がある場合には(S260:YES)、物標の種別が歩行者であると識別して識別結果をRAM13等のメモリに記録し(S280)、識別処理を終了する。
【0053】
[本実施形態による効果]
以上のように詳述した衝突防止システム1において、演算部10のCPU11は、自車両の周囲に電磁波を照射して該電磁波の反射波を検出することによって得られた、反射強度および自車両周囲の物体までの距離の情報を含む物体情報を取得し、物体の高さの情報を取得する。そして、CPU11は、物体の高さおよび物体までの距離に応じて反射強度を補正し、補正後の反射強度に応じて物体の種別を識別する。
【0054】
このような衝突防止システム1によれば、反射強度を正常に検出することを妨害する要素を除外するように反射強度を補正することができる。ここで、物体の種別に応じて電磁波の反射強度が異なることが知られているため、上記実施形態では、正確に反射強度を検出できるようにすることで、物体を正確に識別することができる。
【0055】
また、上記衝突防止システム1においてCPU11は、物体までの距離と物体の高さとに応じて反射波のマルチパスの影響を除去する補正を行う。
このような衝突防止システム1によれば、反射強度を正常に検出することを妨害するパラメータとしてのマルチパスの影響を除去することができる。なお、反射強度を正常に検出することを妨害する他のパラメータとしては、反射面の向き等が挙げられる。
【0056】
また、上記衝突防止システム1においてCPU11は、反射強度が、車両を識別するための車両識別範囲内である場合に物体の種別が車両であると識別し、反射強度が、歩行者を識別するために車両識別範囲の下限値未満の範囲に設定された歩行者識別範囲内である場合に物体の種別が歩行者であると識別する。
【0057】
このような衝突防止システム1によれば、物体の種別が車両であることを識別することができる。また、歩行者による反射強度が車両による反射強度よりも小さいことを鑑みながら、物体の種別が歩行者であることを識別することができる。
【0058】
また、上記衝突防止システム1においてCPU11は、繰り返し物体情報を取得し、反射強度が歩行者識別範囲内であって、かつ反射強度が基準変動幅以上変動している場合に、物体の種別が歩行者であると識別する。
【0059】
このような衝突防止システム1によれば、物体の種別が歩行者であるか否かをより精度よく識別することができる。
さらに、上記衝突防止システム1においては、物体と衝突する虞がある場合に、物体の識別結果に応じた報知を行う警報報知部25を備えている。
【0060】
このような衝突防止システム1によれば、物体の種別に応じた報知を行うことができる。
[その他の実施形態]
本発明の実施の形態は、上記の実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態を採りうる。
【0061】
例えば、上記実施形態において、上記実施形態において物体高さの情報を取得する際には、画像処理によって検出された物体の高さを取得するよう構成したが、物体や物体に付随する施設と通信を行うことにより、物体高さの情報を取得するよう構成してもよい。
【0062】
また、上記衝突防止システム1においては、画像処理によって物体の高さを検出するよう構成したが、他の手法を利用して物体の高さを検出するようにしてもよい。
さらに、上記実施形態においては、物体と衝突する虞がある場合に物体の種別に応じて報知を行うよう構成したが、物体と衝突するか否かに拘わらず、単に物体の種別に応じて報知を行うようにしてもよい。
【0063】
また、上記実施絵形態においては、電磁波による反射波を検出するよう構成したが、音波等の反射波を検出するよう構成してもよい。
【符号の説明】
【0064】
1…衝突防止システム、10…演算部、11…CPU、12…ROM、13…RAM、14…反射強度補正DB、21…レーダ、22…カメラ、23…自車状態検知部、24…衝突回避制御実行部、25…警報報知部。
【特許請求の範囲】
【請求項1】
車両に搭載され、自車両の周囲に存在する物体の種別を識別する物体識別装置であって、
自車両の周囲に音波または電磁波を照射して該音波または電磁波の反射波を検出することによって得られた、反射強度および自車両周囲の物体までの距離の情報を含む物体情報を取得する物体情報取得手段と、
前記物体の高さの情報を取得する物体高取得手段と、
前記物体の高さおよび前記物体までの距離に応じて前記反射強度を補正する強度補正手段と、
前記補正後の反射強度に応じて物体の種別を識別する識別手段と、
を備えたことを特徴とする物体識別装置。
【請求項2】
請求項1に記載の物体識別装置において、
前記強度補正手段は、前記物体までの距離と前記物体の高さとに応じて前記反射波のマルチパスの影響を除去する補正を行うこと
を特徴とする物体識別装置。
【請求項3】
請求項1または請求項2に記載の物体識別装置において、
前記物体高取得手段は、前記物体情報を検出するための手法とは異なる手法を利用して検出された物体の高さの情報を取得すること
を特徴とする物体識別装置。
【請求項4】
請求項3に記載の物体識別装置において、
前記物体高取得手段は、画像処理によって検出された物体の高さを取得すること
を特徴とする物体識別装置。
【請求項5】
請求項1〜請求項4の何れか1項に記載の物体識別装置において、
前記識別手段は、前記反射強度が、車両を識別するための車両識別範囲内である場合に前記物体の種別が車両であると識別すること
を特徴とする物体識別装置。
【請求項6】
請求項5に記載の物体識別装置において、
前記識別手段は、前記反射強度が、歩行者を識別するために前記車両識別範囲の下限値未満の範囲に設定された歩行者識別範囲内である場合に前記物体の種別が歩行者であると識別すること
を特徴とする物体識別装置。
【請求項7】
請求項6に記載の物体識別装置において、
前記物体情報取得手段は、繰り返し前記物体情報を取得し、
前記識別手段は、前記反射強度が前記歩行者識別範囲内であって、かつ前記反射強度が基準変動幅以上変動している場合に、前記物体の種別が歩行者であると識別すること
を特徴とする物体識別装置。
【請求項8】
請求項1〜請求項7の何れか1項に記載の物体識別装置において、
前記物体の識別結果に応じた報知を行う報知部、を備えたこと
を特徴とする物体識別装置。
【請求項9】
コンピュータを、請求項1〜請求項8の何れか1項に記載の物体識別装置を構成する各手段として機能させるための物体識別プログラム。
【請求項1】
車両に搭載され、自車両の周囲に存在する物体の種別を識別する物体識別装置であって、
自車両の周囲に音波または電磁波を照射して該音波または電磁波の反射波を検出することによって得られた、反射強度および自車両周囲の物体までの距離の情報を含む物体情報を取得する物体情報取得手段と、
前記物体の高さの情報を取得する物体高取得手段と、
前記物体の高さおよび前記物体までの距離に応じて前記反射強度を補正する強度補正手段と、
前記補正後の反射強度に応じて物体の種別を識別する識別手段と、
を備えたことを特徴とする物体識別装置。
【請求項2】
請求項1に記載の物体識別装置において、
前記強度補正手段は、前記物体までの距離と前記物体の高さとに応じて前記反射波のマルチパスの影響を除去する補正を行うこと
を特徴とする物体識別装置。
【請求項3】
請求項1または請求項2に記載の物体識別装置において、
前記物体高取得手段は、前記物体情報を検出するための手法とは異なる手法を利用して検出された物体の高さの情報を取得すること
を特徴とする物体識別装置。
【請求項4】
請求項3に記載の物体識別装置において、
前記物体高取得手段は、画像処理によって検出された物体の高さを取得すること
を特徴とする物体識別装置。
【請求項5】
請求項1〜請求項4の何れか1項に記載の物体識別装置において、
前記識別手段は、前記反射強度が、車両を識別するための車両識別範囲内である場合に前記物体の種別が車両であると識別すること
を特徴とする物体識別装置。
【請求項6】
請求項5に記載の物体識別装置において、
前記識別手段は、前記反射強度が、歩行者を識別するために前記車両識別範囲の下限値未満の範囲に設定された歩行者識別範囲内である場合に前記物体の種別が歩行者であると識別すること
を特徴とする物体識別装置。
【請求項7】
請求項6に記載の物体識別装置において、
前記物体情報取得手段は、繰り返し前記物体情報を取得し、
前記識別手段は、前記反射強度が前記歩行者識別範囲内であって、かつ前記反射強度が基準変動幅以上変動している場合に、前記物体の種別が歩行者であると識別すること
を特徴とする物体識別装置。
【請求項8】
請求項1〜請求項7の何れか1項に記載の物体識別装置において、
前記物体の識別結果に応じた報知を行う報知部、を備えたこと
を特徴とする物体識別装置。
【請求項9】
コンピュータを、請求項1〜請求項8の何れか1項に記載の物体識別装置を構成する各手段として機能させるための物体識別プログラム。
【図1】


【図2】
【図3】
【図5】
【図4】
【図2】
【図3】
【図5】
【図4】
【公開番号】特開2012−247215(P2012−247215A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−117104(P2011−117104)
【出願日】平成23年5月25日(2011.5.25)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月25日(2011.5.25)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]