
物品供給装置
【課題】幅の広い平面(第1の面)を上下にして搬送されてきた物品を、90度回転させて立てた状態で箱詰めするために供給する装置を提供する。
【解決手段】供給コンベヤ4によって、幅の広い面を上下にしてランダムな状態で搬送されてきた物品2を、ロボット10で方向を揃えて取り出し載置プレートに載せる。載置プレートを90度回転させて物品2を幅の狭い面(第2の面)が上下に来るように立ち上げ、各載置プレートの間隔を縮小して物品2を集積した後、製品コンベヤ16に追従して移動するプッシャによってこれら物品2を押し出して前記製品コンベヤ16の収容部14内に挿入する。
【解決手段】供給コンベヤ4によって、幅の広い面を上下にしてランダムな状態で搬送されてきた物品2を、ロボット10で方向を揃えて取り出し載置プレートに載せる。載置プレートを90度回転させて物品2を幅の狭い面(第2の面)が上下に来るように立ち上げ、各載置プレートの間隔を縮小して物品2を集積した後、製品コンベヤ16に追従して移動するプッシャによってこれら物品2を押し出して前記製品コンベヤ16の収容部14内に挿入する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、収容部を有するコンベヤに物品を供給する物品供給装置に係り、特に、受け渡された物品の姿勢を変更してから供給することが可能な物品供給装置に関するものである。
【背景技術】
【0002】
コンベヤによって搬送されてきた物品を、ロボットにより操作される保持具によって吸着保持し、コンベヤによって送られているケース内に挿入する箱詰め装置は従来から広く用いられている。ロボットを使用して保持される物品が直方体形状で、幅の広い平面と、幅の狭い面とを有する形状の場合には、幅の広い面を吸着して保持するために、この幅の広い面を上下に位置させて搬送するようにしている(特許文献1参照)。
【0003】
ロボットを用いて幅の広い面を吸着する場合には、前記のような形状の物品を箱詰めするために、物品の幅の広い面の上に次の物品の幅の広い面を積み重ねていく平積みにしか対応することができないという問題がある。各物品を90度立ち上げて広い平面同士を横方向に重ね合わせるようにして集積してケース内に挿入するためには、幅の広い面を上下に位置させて平面状に並んでいた物品を横向きに立ち上げなければならず、従来は、起立装置で物品を1個ずつ起こして集積するようにしていた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−76322号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
解決しようとする問題点は、幅の広い面を立ち上げるための起立装置を用いる場合には、装置の構造が複雑で大型化してしまい、また起立動作に時間がかかるという点である。さらに、順次起立させながら搬送すると、物品が不安定な状態になるという点である。
【課題を解決するための手段】
【0006】
本発明は、物品を収容する収容部を有するコンベヤと、このコンベヤの側方に配置され、物品を載置する複数のプレートおよびプレート上の物品を前記コンベヤの収容部に押し出すプッシャを有する物品供給手段と、前記プレートに物品を受け渡す物品受け渡し手段とを備え、前記物品供給手段に、前記プレートを回転させて載置されている物品の姿勢を変更する姿勢変更手段と、各プレート上の物品の間隔を変更する拡縮手段を設け、前記プレートに載置された物品の姿勢を変更するとともに、その間隔を縮めた後、前記収容部へ押し出すことを特徴とするものである。
【0007】
また、第2の発明は、前記第1の発明において、前記プレートに、物品の第1の面を支持する第1載置面と、物品の第2の面を支持する第2載置面とを形成し、前記第1載置面の幅を第2載置面の幅よりも広く設定するとともに、前記第1載置面と第2載置面とをほぼL字状に配置したことを特徴とするものである。
【0008】
さらに、第3の発明は、前記第1の発明または第2の発明において、前記物品供給手段を、前記コンベヤの搬送方向に沿って、このコンベヤに同期して移動可能に構成し、物品供給手段をコンベヤに同期して前進させつつ、プッシャによってプレート上の物品をコンベヤの収容部へ押し出すことを特徴とするものである。
【発明の効果】
【0009】
本発明の物品供給装置は、物品受け渡し手段から物品供給手段のプレート上に受け渡した物品を、姿勢変更手段で姿勢を変更し、さらに、拡縮手段によって間隔を変更してからプッシャによって製品コンベヤの収容部に押し込むようにしたので、簡単な動作でしかも短時間で物品を集積して供給することができ、また、物品を立ち上げた不安定な状態で搬送する必要がないという利点がある。さらに、姿勢を変更する角度を変えることにより、平積みや立てて並べた状態あるいは斜めにして順次重ね合わせた状態等各種の集積態様に対応することができる。
【図面の簡単な説明】
【0010】
【図1】図1は本発明の一実施例に係る物品供給装置の全体の配置を示す平面図である。(実施例1)
【図2】図2は前記物品供給装置の横断面図である。
【図3】図3は前記物品供給装置に設けられた受け渡し手段の正面図である。
【図4】図4は前記物品供給装置に設けられた物品供給手段の平面図である。
【図5】図5は前記物品供給手段の側面図である。
【図6】図6は前記物品供給手段に設けられた拡縮手段を示す横断面図である。
【図7】図7は前記拡縮手段の平面図である。
【図8】図8は前記拡縮手段の動作を説明する図であり、載置プレートが拡開した状態を示す。
【図9】図9は前記拡縮手段の動作を説明する図であり、載置プレートが収縮した状態を示す。
【図10】図10は前記物品供給手段の横断面図である。
【図11】図11は前記物品供給手段のプッシャを示す側面図である。
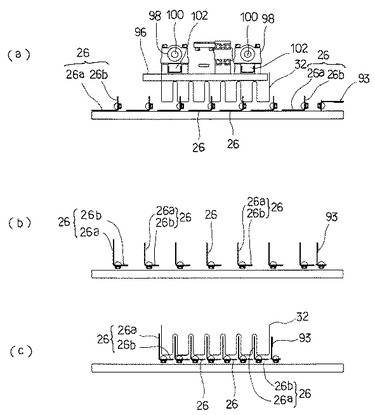
【図12】図12(a)、(b)、(c)は前記物品供給手段の動作を順次説明する図である。
【図13】図13は前記拡縮手段と第1載置プレート26Aとの連結部を示す図である。
【図14】図14は前記拡縮手段と第7載置プレート26Gとの連結部を示す図である。
【図15】図15は前記拡縮手段と第2載置プレート26Bとの連結部を示す図である。
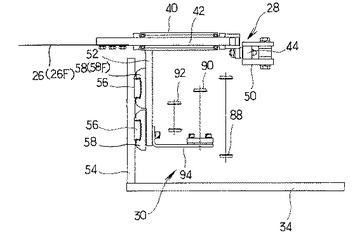
【図16】図16は前記拡縮手段と第6載置プレート26Fとの連結部を示す図である。
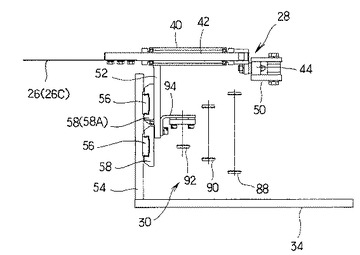
【図17】図17は前記拡縮手段と第3載置プレート26Cとの連結部を示す図である。
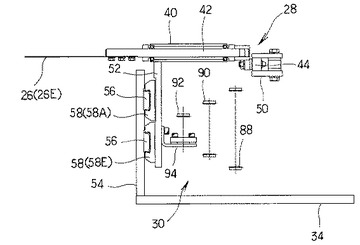
【図18】図18は前記拡縮手段と第5載置プレート26Eとの連結部を示す図である。
【発明を実施するための形態】
【0011】
物品をその幅の広い平面を上下にしてランダムな状態で連続的に搬送する供給コンベヤと、物品の収容部を有する製品コンベヤとが平行に配置されて同方向に走行している。供給コンベヤ上を搬送される物品の位置、方向等を検出するカメラが設けられ、このカメラからの情報によってロボット等の物品受け渡し手段が物品の方向を揃えて保持する。前記供給コンベヤと製品コンベヤとの間に物品供給手段が配置されており、この物品供給手段に設けられている複数の載置プレート上に、前記受け渡し手段が保持している物品を載置する。載置プレートは幅の広い第1載置面と、この第1載置面とほぼ直角に形成された幅の狭い第2載置面とを有しており、前記受け渡し手段から引き渡される物品は、その幅の広い平面を第1載置面上に載せられる。その後、姿勢変更手段によりすべての載置プレートが90度回転され、物品は横に立ち上げられた状態で第2載置面上に乗り移る。また、拡縮手段によって物品間の間隔が縮小され、物品が互いに接近した状態になる。物品をこの状態にして物品供給手段を製品コンベヤに追従して移動させながら、プッシャを製品コンベヤ方向に前進させて載置プレート上の物品を押し出し、製品コンベヤの収容部内に挿入する。簡単な動作でしかも短時間で物品を集積し製品コンベヤの収容部に挿入するという目的を、前記構成により実現することができる。
【実施例1】
【0012】
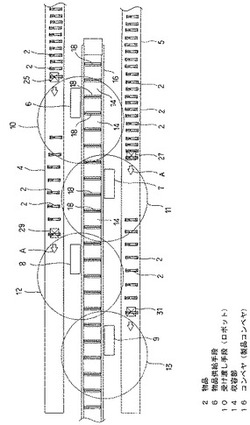
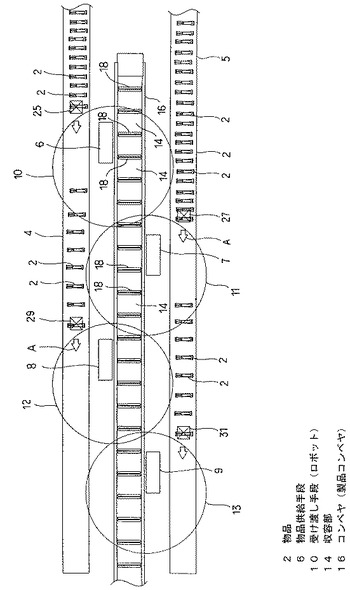
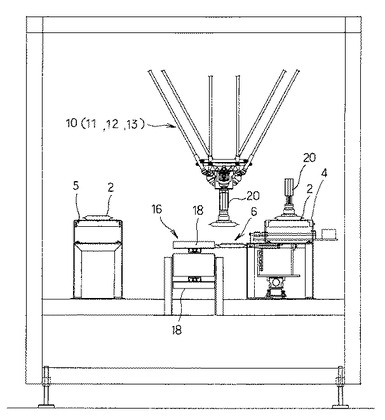
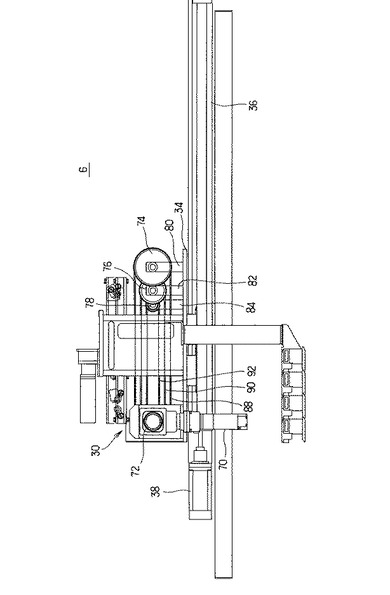
以下、図面に示す実施例により本発明を説明する。本発明に係る物品供給装置は、図1に示すように、物品2を供給する供給コンベヤ4、5と、この供給コンベヤ4、5の側部に配置された物品供給手段6、7、8、9と、前記供給コンベヤ4、5によって搬送されてきた物品2を取り出して前記物品供給手段6、7、8、9に受け渡す物品受け渡し手段10、11、12、13と、前記供給コンベヤ4、5と平行に配置され、物品2を収容する収容部14を有する製品コンベヤ16とを備えている。前記物品供給手段6、7、8、9は、受け渡し手段10、11、12、13から受け取った物品2の姿勢を変更し、集積した後に、製品コンベヤ16の収容部14内に挿入する。なお、物品受け渡し手段10、11、12、13は、図2および図3に示すようにロボットであり、図1中に符号を付した円はこれらロボットの可動範囲を示している。また、この実施例では、処理能力を向上させるために、製品コンベヤ16を中央に配置して、その両側に供給コンベヤ4、5を配置し、さらに、各供給コンベヤ4、5の側部にそれぞれ2箇所の物品供給手段6、8および7、9を設け、これら各物品供給手段6、7、8、9に対応して、4台の物品受け渡し手段10、11、12、13を配置している。但し、前記供給コンベヤ4、5、物品供給手段6、7、8、9、物品受け渡し手段10、11、12、13等の数はこの実施例に限定されないことはいうまでもない。
【0013】
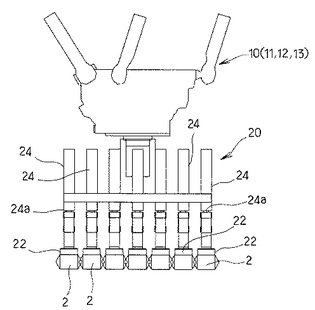
各供給コンベヤ4、5は、物品2をランダムな状態で一列で連続的に搬送する。平行して配置された2本の供給コンベヤ4、5の中間に、これら供給コンベヤ4、5と平行して製品コンベヤ16が配置されている。この製品コンベヤ16は、一定の間隔で仕切り板18が設けられており、各仕切板18の間の空間が、所定個数の物品2を収容する収容部14になっている。前記物品受け渡し手段10、11、12、13としてのロボットは、そのハンド20に複数個(この実施例では7個)の物品2を保持する保持部22が一列で設けられている(図3参照)。各保持部22はエアシリンダ24のピストンロッド24aに取り付けられ、エアシリンダ24の作動によって伸縮できるようになっており、各ロボット10、11、12、13に対応して設けられているカメラ25、27、29、31(図1参照)によって物品2の位置、方向等を検出し、同一の方向を向けて1個ずつ物品2を保持する。このロボット10、11、12、13が供給コンベヤ4、5によって搬送されてきた物品2を保持して、物品供給手段6、7、8、9に受け渡す。なお、供給コンベヤ4、5、ロボット10、11、12、13および物品供給手段6、7、8、9は、それぞれ同一の構成なので、そのうちの一つ(供給コンベヤ4、物品供給手段6およびロボット10)についてだけ説明する。
【0014】
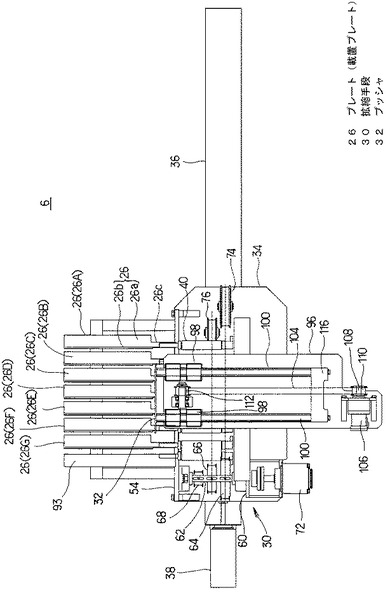
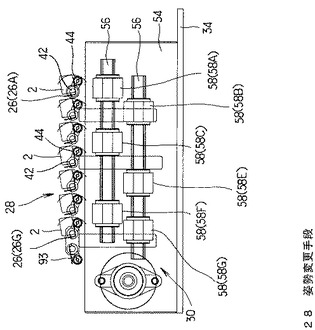
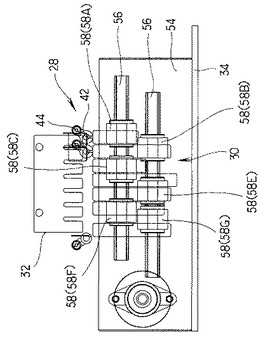
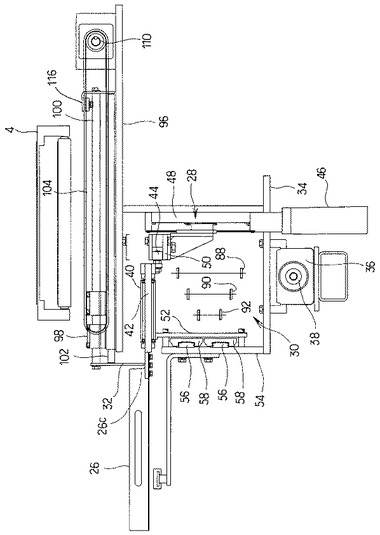
物品供給手段6は、図4ないし図6に示すように、前記供給コンベヤ4および製品コンベヤ16の搬送方向に対して直交する方向を向けた複数枚(この実施例では7枚)の細長い載置プレート26(26A、26B、26C、26D、26E、26F、26G)と、これら載置プレート26を、その長手方向の軸線(後に説明する回転軸の軸線)を中心にほぼ90度回転させて物品2の姿勢を変更する姿勢変更手段28(図8、図9および図10参照)と、これら7枚の載置プレート26の間隔を縮小しまたは拡張する拡縮手段30(図7、図8、図9および図10参照)と、載置プレート26上の物品2を押し出して、その前方側(図4の上方側)に位置する製品コンベヤ16の収容部14内に挿入するプッシャ32(図10、図11および図12参照)を備えている。これら載置プレート26、姿勢変更手段28、拡縮手段30およびプッシャ32等はベースプレート34上に載せられて、製品コンベヤ16の搬送方向Aに沿って一体として進退動するようになっている。製品コンベヤ16と平行してアクチュエータ36(図4、図5、図6および図10参照)が配置されている。前記ベースプレート34はこのアクチュエータ36に連結されており、往復移動用サーボモータ38の駆動によって、製品コンベヤ16の搬送方向Aに往復移動する。このベースプレート34が前進(製品コンベヤ16の搬送方向Aに移動)する際には、製品コンベヤ16に追従して等速で移動する。
【0015】
各載置プレート26は、横断面がほぼL字状をしており(図4および図12(a)、(b)、(c)参照)、幅の広い第1載置面26aと幅の狭い第2載置面26bの2つの載置面を有している。前記ロボット10から物品2を受け渡される際には、図12(a)に示すように、第1載置面26aを水平にし、第2載置面26bを直立した状態にしている。また、図12(b)、(c)に示すように、第1載置面26aを直立した状態にし、第2載置面26bを水平な状態にして、載置している物品2の姿勢を変更し、載置プレート26の間隔を縮めた後、プッシャ32によってその物品2を製品コンベヤ16上に押し出すようにしている。なお、この実施例で扱われる物品2は、例えば、ピロー包装されたアイスバーのように、全体がほぼ直方体の形状で幅の広い面(物品の第1の面)と幅の狭い面(物品の第2の面)とを有している。
【0016】
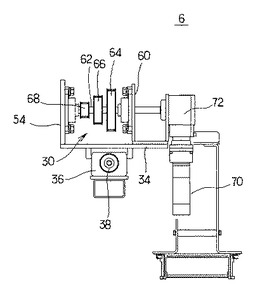
細長い載置プレート26は、ベースプレート34の上方から製品コンベヤ16の方向に伸びており、その基部26c側が、ベースプレート34の上方に配置された支持筒体40にボールベアリングを介して回転自在に支持された回転軸42に連結されている(図10参照)。この回転軸42を回転させることにより、前記載置プレート26を回転させてその第1載置面26aと第2載置面26bの位置を変えることができる。回転軸42の後端部に、この回転軸42の軸線から偏芯させてカムローラ44が連結されている(図8、図9および図10参照)。このカムローラ44は、ベースプレート34に直立して取り付けられた姿勢変更用サーボモータ46によって作動するアクチュエータ48に連結された水平カム50のカム溝に係合している。この水平カム50が下降しているときには(図8および図10参照)、第1載置部26aが水平な状態で、第2載置部26bは直立している(図12(a)に示す状態)。また、水平カム50を上昇させ、カムローラ44を回転させつつ押し上げて(図9参照)回転軸42を回転させたときには(この実施例では90度回転させる)、第1載置部26aが直立した状態で、第2載置部26bが水平な状態になる(図12(b)、(c)に示す状態)。
【0017】
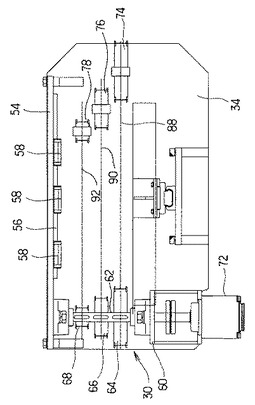
さらに、前記ベースプレート34上には、載置プレート26の間隔を縮め、あるいは拡開する拡縮手段30が設けられている。各載置プレート26に連結されている回転軸42を支持している支持筒体40は、直立した取付部材52の上端に連結されている(図10参照)。ベースプレート34の製品コンベヤ16側の端部(図10の左側の端部)上に直立した壁面54が固定されており、この直立した壁面54の内側に2本の水平なガイドレール56が平行して固定されている。前記支持筒体40が取り付けられている各取付部材52の、製品コンベヤ16側の側面に1箇所のスライダ58が固定され、前記上下のガイドレール56のいずれか一方に係合している。なお、後に説明するように、中央に位置する載置プレート26(26D)は拡縮する際に移動しないので、スライダ58は設けられていない。
【0018】
ベースプレート34上には、大中小3組のベルトによる拡縮用の駆動機構が設けられている。図4ないし図7に示すように、前面側の直立した壁面54とこの壁面54の一部に対向して固定された後方側の直立板部60との間に、駆動軸62が回転自在に支持され、この駆動軸62に、大径の駆動プーリ64、中径の駆動プーリ66および小径の駆動プーリ68が連結されて一体的に回転するようになっている(図4、図6および図7参照)。この駆動軸62は、拡縮用サーボモータ70の駆動を減速機72を介して伝達されて回転される。一方、大中小3個の従動プーリ74、76、78が前記大中小3個の駆動プーリ64、66、68に対応して設置されている。これら従動プーリ74、76、78は、ベースプレート34上にそれぞれ支柱80、82、84を介して(図5参照)、対応する駆動プーリ64、66、68と同一の高さに支持されている。大中小3組の駆動プーリ64、66、68および従動プーリ74、76、78間に、それぞれ載置プレート26の間隔調整用の無端ベルト88、90、92が掛け回されている(図5および図7参照)。
【0019】
前記7枚の載置プレート26(26A、26B、26C、26D、26E、26F、26G)は、中央の第4載置プレート26Dを中心にして、左右両側に3枚ずつ配置されており、これら各プレート26A、26B、26Cと26E、26F、26Gが中央の第4プレート26Dに向かって接近し、また離隔して間隔の調整を行う。従って、最も外側の第1載置プレート26Aと第7載置プレート26Gが最も大きく移動し、第2載置プレート26Bと第6載置プレート26Fが中間の移動量で移動し、最も内側の第3載置プレート26Cと第5載置プレート26Eが最も小さい移動量で移動する。このような動作をさせるために、最も外側の載置プレート26A、26Gが大径プーリ64、74間に掛け回されているベルト88に連結され、最も内側の載置プレート26C、26Eが小径のプーリ68、78に掛け回されているベルト92に連結され、中間の載置プレート26B、26Fが中径のプーリ66、76に掛け回されたベルト90に連結されている。なお、第7番目の載置プレート26Gに隣接して、載置プレート26とほぼ同一形状のガイドプレート93が配置されている(図4および図8の左端のプレート参照)。このガイドプレート93は、プッシャ32で物品2を移送する際に、第7番目の載置プレート26G上の物品2が落下しないようにガイドするものであり、その他の載置プレート26A、26B、26C、26D、26E、26Fでは隣接する載置プレートがそれぞれガイドするために設けられていない(図12(c)参照)。
【0020】
前記各載置プレート26(26A、26B、26C、26D、26E、26F、26G)に連結されている回転軸42を支持する支持筒体40は、前述のようにそれぞれ直立した取付部材52に支持されており、この直立部材52に、前記ガイドレール56に嵌合するスライダ58が固定されるとともに、L字状の取り付けプレート94を介して、前記大中小の各プーリ64、74、66、76、68、78に掛け回されている前記ベルト88、90、92のいずれかに連結されている(図13ないし図18参照)。
【0021】
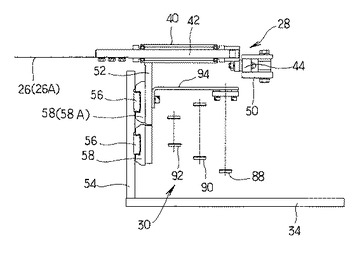
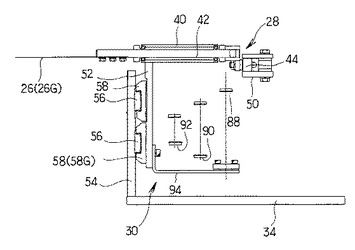
7枚の載置プレート26(26A、26B、26C、26D、26E、26F、26G)のうち、物品搬送方向Aの最も上流側に位置する第1載置プレート26A(図4の一番右側に位置する載置プレートおよびこの載置プレート26Aに連結されている図8の一番右側に位置するスライダ58A参照)は、大径プーリ64、74に掛け回されているベルト88の上部側に連結されている(図13参照)。なお、図8および図9には、ガイドレール56に嵌合しているスライダ58が示されているので、各載置プレート26(26A、26B、26C、26E、26F、26G)に対応するスライダ58(58A、58B、58C、58E、58F、58G)によってその位置を説明する。また、物品搬送方向Aの最も下流側に位置する第7載置プレート26G(図4の一番左側に位置する載置プレートおよび図8の一番左側に位置するスライダ58G参照)は、大径プーリ64、74に掛け回されているベルト88の下部側に連結されている(図14参照)。
【0022】
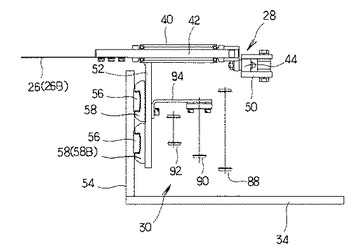
物品搬送方向Aの上流側から2番目に位置する第2載置プレート26B(図4の右から2番目に位置する載置プレートおよび図8の右から2番目に位置するスライダ58B参照)は、中径プーリ66、76に掛け回されているベルト90の上部側に連結されている(図15参照)。また、物品搬送方向Aの下流側から2番目に位置する第6載置プレート26F(図4の左から2番目に位置する載置プレートおよび図8の左から2番目に位置するスライダ58B参照)は、中径プーリ66、76に掛け回されているベルト90の下部側に連結されている(図16参照)。
【0023】
物品搬送方向Aの上流側から3番目に位置する第3載置プレート26C(図4の右から3番目に位置する載置プレートおよび図8の右から3番目に位置するスライダ58C参照)は、小径プーリ68、78に掛け回されているベルト92の上部側に連結されている(図17参照)。また、物品搬送方向Aの下流側から3番目に位置する第5載置プレート26E(図4の左から3番目に位置する載置プレートおよび図8の左から3番目に位置するスライダ58E参照)は、小径プーリ68、78に掛け回されているベルト92の下部側に連結されている(図18参照)。なお、前記各載置プレート26(26A、26B、26C、26E、26F、26G)とスライダ58(58A、58B、58C、58E、58F、58G)とを連結する直立した取付部材52は、他のスライダ58と干渉しないように隙間が形成されている。
【0024】
ロボット10から物品供給手段6の載置プレート26上に受け渡された物品2は、載置プレート26をほぼ90度回転させて姿勢を変更された後、拡縮手段30によって互いの間隔を縮められてから、プッシャ32によって載置プレート26上から押し出されて製品コンベヤ16の収容部14内に挿入される。この物品押し出し用のプッシャ32は、前記ベースプレート34の上方に配置されたプッシャ用プレート96上に設置されている(図4、図10、図11および図12(a)参照)。ベースプレート34は、その長手方向を製品コンベヤ16の搬送方向Aに向けてアクチュエータ36に連結され、製品コンベヤ16の搬送方向Aに進退動するようになっており、プッシャ用プレート96は、その長手方向を製品コンベヤ16の搬送方向Aと直交する方向を向けて、ベースプレート34上に固定されている(図4および図10参照)。
【0025】
プッシャ用プレート96上の先端部寄り(製品コンベヤ16寄り)に二組のガイドブロック98が固定され、これらガイドブロック98に2本の平行なスライドロッド100が進退動可能に支持されている。さらにこれらスライドロッド100の下方に配置された取付ロッド102が、前記各ガイドブロック98の下方に進退動可能に支持されている。これらスライドロッド100と取り付けロッド102の先端にプッシャ32が固定されている。このプッシャ32は、前記各ロッド100、102の先端面に下方を向けて垂直に固定されている。プッシャ32は、前記載置プレート26上に載せられた物品2が、90度回転されて立てた状態になり、かつ、間隔を縮めた状態の時に、各載置プレート26上の物品2を押し出せるようになっている。従って、載置プレート26の第2載置面26bを水平にして接近させた状態の時に、直立している第1載置面26aの間を通過できるような幅の櫛歯状になっている(図12(c)参照)。
【0026】
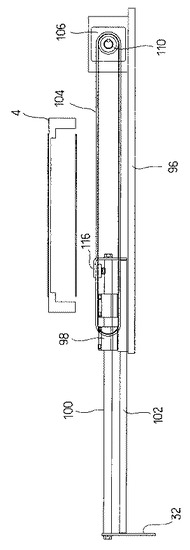
平行な2本のスライドロッド100の中間に、プッシャ32を進退動させる無端状のベルト104が配置されている。プッシャ用プレート96の後端(供給コンベヤ4側の端部)に設置されたプッシャ駆動用サーボモータ106の出力軸108に駆動プーリ110が連結され、この駆動プーリ110とプッシャ用プレート96の先端部上に設置された従動プーリ112との間に前記無端状ベルト104が掛け回されている。このベルト104に連結部材116を介して前記スライドロッド100が連結されている。前記サーボモータ106の駆動によりベルト104が走行し、スライドロッド100および取り付けロッド102を介してプッシャ32が進退動する。このプッシャ32は、前記載置プレート26上の物品2を載置する第1および第2載置部26a、26bよりも後方側の位置から(図10に示す位置)、載置プレート26の先端よりも前方の、物品2を製品コンベヤ16上に押し出すことができる位置(図11に示す位置)の間で往復動するようになっている。
【0027】
以上の構成に係る物品供給装置の作動について説明する。供給コンベヤ4によって物品2がランダムな状態で連続的に搬送される。物品供給手段6および物品受け渡し手段としてのロボット10が設置されている位置のやや上流側に、物品2の位置、方向等を検出するカメラ25が設置されており、搬送されてくる物品2を1個ずつ撮影する。このカメラ25からの情報に応じて7個の保持部22を有するロボットハンド20が、各物品2を同じ方向に揃えながら順次保持する。保持部22に7個の物品2を保持したロボット10が、これらの物品2を物品供給手段6の各載置プレート26上に載置する。このとき載置プレート26は、幅の広い第1載置部26aを水平にし、幅の狭い第2載置部26bを直立した状態にしており、物品2は幅の広い面(第1の面)を上下に位置させて第1載置部26a上に載せられる。
【0028】
載置プレート26上に載せられた物品2は、姿勢変更手段28によってその姿勢を変更される。載置プレート26は、その基部側に連結されている回転軸42が支持筒40内で回転できるようになっており、回転軸42の後端部にこの回転軸42の軸線から偏芯して連結されているカムローラ44を上昇させることにより、載置プレート26をほぼ90度回転させることができる。カムローラ44は、水平カム50のカム溝内に嵌合しており、姿勢変更用サーボモータ46によってアクチュエータ48が作動して水平カム50を上昇させることによりカムローラ44を所定高さまで上昇させつつ回転させる。カムローラ44の上昇に伴って回転軸42が回転し、さらにこの回転軸42に連結されている載置プレート26が回転する。載置プレート26は、ロボット10の保持部22から物品2が載置される時点では、図12(a)に示すように、幅の広い第1載置部26aが水平な状態で、幅の狭い第2載置部26bが直立した状態になっている。載置プレート26が90度回転されると、図12(b)に示すように、第1載置部26aが直立した状態になるとともに第2載置部26bが水平になる。従って、幅の広い面(第1の面)を上下に位置させて第1載置部26aに載っていた物品2は、幅の広い面が両サイドに位置し、第2載置面26b上に幅の狭い面(第2の面)が上下に位置した状態になる。
【0029】
続いて、各第2載置部26b上で幅の狭い面(第2の面)を上下にして立ち上げた状態になっている物品2を、拡縮手段30によって互いに接近させる。7枚の載置プレート26(26A、26B、26C、26D、26E、26F、26G)のうち、中央の載置プレート26Dはその位置で移動しないように固定されており、その他の6本の載置プレート26A、26B、26C、26E、26F、26Gは、それぞれ大径プーリ64、74、中径プーリ66、76および小径プーリ68、78に掛け回されたベルト88、90、92の所定の位置に連結されている(図13〜図18参照)。従って、拡縮用サーボモータ70によって駆動軸62に連結されている大中小の駆動プーリ64、66、68を回転させることにより、最も外側の載置プレート26A、26G(図8および図9の対応するスライダ58A、58G参照)が最も大きく内側へ向かって移動し、その内側の載置プレート26B、26F(図8および図9のスライダ58B、58F参照)が外側の載置プレート26A、26Gよりも少ない距離だけ移動し、最も内側の載置プレート26C、26E(図8および図9のスライダ58C、58E参照)は最も少ない距離だけ移動し、すべての載置プレート26(26A、26B、26C、26D、26E、26F、26G)がほぼ等距離で接近した状態になる(図12(c)の状態)。
【0030】
拡縮手段30によって載置プレート26(26A、26B、26C、26D、26E、26F、26G)を接近させることにより、各載置プレート26上に載置されている物品2を接近させて集積した状態にした後、これら物品2をプッシャ32によって押し出して製品コンベヤ16の収容部14へ移動させる。製品コンベヤ16は連続的に走行しており、ベースプレート34上に設置されている物品供給手段6全体を製品コンベヤ16の走行に追従させて搬送方向Aへ移動させつつ、プッシャ32によって各物品2を押し出すようにしている。
【0031】
ベースプレート34は、往復移動用サーボモータ38によって作動するアクチュエータ36に連結されて移動する。また、このベースプレート34の移動中に、プッシャ32が作動して物品2を製品コンベヤ16の収容部14内に挿入する。プッシャ32は、作動開始時には物品2が載置されている載置プレート26よりも後方に位置しており(図10参照)、プッシャ駆動用サーボモータ106の駆動によって製品コンベヤ16方向へ前進し各載置プレート26(26A、26B、26C、26D、26E、26F、26G)上の物品2を収容部14内に押し込む(プッシャ32は図11の位置まで移動する)。プッシャ32は、7枚の載置プレート26(26A、26B、26C、26D、26E、26F、26G)が姿勢を変更され、かつ、間隔を収縮された状態で、各載置プレート26(26A、26B、26C、26D、26E、26F、26G)の間を通過できるような形状の櫛歯状をしており(図12(a)、(c)参照)、載置プレート26に干渉することなくスムーズに前進することができる。製品コンベヤ16に設けられている収容部14は、搬送方向の前後を仕切り板18によって区画されており、収容された物品2は、幅の狭い面(第2の面)を上下にした状態でも安定して搬送することができる。
【0032】
物品2を製品コンベヤ16の収容部14内に挿入した後、プッシャ32は載置プレート26の後方側へ後退し、ベースプレート34は製品コンベヤ16の上流側に後退して、次の物品2がロボット10により受け渡されるまで待機する。なお、前記実施例では、載置プレート26を90度回転させて物品2の姿勢を変更したが、必ずしも90度回転させて物品2を立ち上げた状態にするものに限らず、その他の回転量で姿勢を変更することもできる。例えば、各物品2を斜めにして順次重ね合わせるようにしてもよい。この場合には、プッシャ32等のアタッチメント部品を変更する必要がある。また、前記実施例では、製品コンベヤ16に仕切り板18を設けて、等間隔で複数の収容部14を有する構成としたが、カートンコンベヤによって搬送される起函されたカートン内に物品を押し込む構成であってもよい。
【符号の説明】
【0033】
2 物品
6 物品供給手段
10 受け渡し手段(ロボット)
14 収容部
16 コンベヤ(製品コンベヤ)
26 プレート(載置プレート)
28 姿勢変更手段
30 拡縮手段
32 プッシャ
【技術分野】
【0001】
本発明は、収容部を有するコンベヤに物品を供給する物品供給装置に係り、特に、受け渡された物品の姿勢を変更してから供給することが可能な物品供給装置に関するものである。
【背景技術】
【0002】
コンベヤによって搬送されてきた物品を、ロボットにより操作される保持具によって吸着保持し、コンベヤによって送られているケース内に挿入する箱詰め装置は従来から広く用いられている。ロボットを使用して保持される物品が直方体形状で、幅の広い平面と、幅の狭い面とを有する形状の場合には、幅の広い面を吸着して保持するために、この幅の広い面を上下に位置させて搬送するようにしている(特許文献1参照)。
【0003】
ロボットを用いて幅の広い面を吸着する場合には、前記のような形状の物品を箱詰めするために、物品の幅の広い面の上に次の物品の幅の広い面を積み重ねていく平積みにしか対応することができないという問題がある。各物品を90度立ち上げて広い平面同士を横方向に重ね合わせるようにして集積してケース内に挿入するためには、幅の広い面を上下に位置させて平面状に並んでいた物品を横向きに立ち上げなければならず、従来は、起立装置で物品を1個ずつ起こして集積するようにしていた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−76322号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
解決しようとする問題点は、幅の広い面を立ち上げるための起立装置を用いる場合には、装置の構造が複雑で大型化してしまい、また起立動作に時間がかかるという点である。さらに、順次起立させながら搬送すると、物品が不安定な状態になるという点である。
【課題を解決するための手段】
【0006】
本発明は、物品を収容する収容部を有するコンベヤと、このコンベヤの側方に配置され、物品を載置する複数のプレートおよびプレート上の物品を前記コンベヤの収容部に押し出すプッシャを有する物品供給手段と、前記プレートに物品を受け渡す物品受け渡し手段とを備え、前記物品供給手段に、前記プレートを回転させて載置されている物品の姿勢を変更する姿勢変更手段と、各プレート上の物品の間隔を変更する拡縮手段を設け、前記プレートに載置された物品の姿勢を変更するとともに、その間隔を縮めた後、前記収容部へ押し出すことを特徴とするものである。
【0007】
また、第2の発明は、前記第1の発明において、前記プレートに、物品の第1の面を支持する第1載置面と、物品の第2の面を支持する第2載置面とを形成し、前記第1載置面の幅を第2載置面の幅よりも広く設定するとともに、前記第1載置面と第2載置面とをほぼL字状に配置したことを特徴とするものである。
【0008】
さらに、第3の発明は、前記第1の発明または第2の発明において、前記物品供給手段を、前記コンベヤの搬送方向に沿って、このコンベヤに同期して移動可能に構成し、物品供給手段をコンベヤに同期して前進させつつ、プッシャによってプレート上の物品をコンベヤの収容部へ押し出すことを特徴とするものである。
【発明の効果】
【0009】
本発明の物品供給装置は、物品受け渡し手段から物品供給手段のプレート上に受け渡した物品を、姿勢変更手段で姿勢を変更し、さらに、拡縮手段によって間隔を変更してからプッシャによって製品コンベヤの収容部に押し込むようにしたので、簡単な動作でしかも短時間で物品を集積して供給することができ、また、物品を立ち上げた不安定な状態で搬送する必要がないという利点がある。さらに、姿勢を変更する角度を変えることにより、平積みや立てて並べた状態あるいは斜めにして順次重ね合わせた状態等各種の集積態様に対応することができる。
【図面の簡単な説明】
【0010】
【図1】図1は本発明の一実施例に係る物品供給装置の全体の配置を示す平面図である。(実施例1)
【図2】図2は前記物品供給装置の横断面図である。
【図3】図3は前記物品供給装置に設けられた受け渡し手段の正面図である。
【図4】図4は前記物品供給装置に設けられた物品供給手段の平面図である。
【図5】図5は前記物品供給手段の側面図である。
【図6】図6は前記物品供給手段に設けられた拡縮手段を示す横断面図である。
【図7】図7は前記拡縮手段の平面図である。
【図8】図8は前記拡縮手段の動作を説明する図であり、載置プレートが拡開した状態を示す。
【図9】図9は前記拡縮手段の動作を説明する図であり、載置プレートが収縮した状態を示す。
【図10】図10は前記物品供給手段の横断面図である。
【図11】図11は前記物品供給手段のプッシャを示す側面図である。
【図12】図12(a)、(b)、(c)は前記物品供給手段の動作を順次説明する図である。
【図13】図13は前記拡縮手段と第1載置プレート26Aとの連結部を示す図である。
【図14】図14は前記拡縮手段と第7載置プレート26Gとの連結部を示す図である。
【図15】図15は前記拡縮手段と第2載置プレート26Bとの連結部を示す図である。
【図16】図16は前記拡縮手段と第6載置プレート26Fとの連結部を示す図である。
【図17】図17は前記拡縮手段と第3載置プレート26Cとの連結部を示す図である。
【図18】図18は前記拡縮手段と第5載置プレート26Eとの連結部を示す図である。
【発明を実施するための形態】
【0011】
物品をその幅の広い平面を上下にしてランダムな状態で連続的に搬送する供給コンベヤと、物品の収容部を有する製品コンベヤとが平行に配置されて同方向に走行している。供給コンベヤ上を搬送される物品の位置、方向等を検出するカメラが設けられ、このカメラからの情報によってロボット等の物品受け渡し手段が物品の方向を揃えて保持する。前記供給コンベヤと製品コンベヤとの間に物品供給手段が配置されており、この物品供給手段に設けられている複数の載置プレート上に、前記受け渡し手段が保持している物品を載置する。載置プレートは幅の広い第1載置面と、この第1載置面とほぼ直角に形成された幅の狭い第2載置面とを有しており、前記受け渡し手段から引き渡される物品は、その幅の広い平面を第1載置面上に載せられる。その後、姿勢変更手段によりすべての載置プレートが90度回転され、物品は横に立ち上げられた状態で第2載置面上に乗り移る。また、拡縮手段によって物品間の間隔が縮小され、物品が互いに接近した状態になる。物品をこの状態にして物品供給手段を製品コンベヤに追従して移動させながら、プッシャを製品コンベヤ方向に前進させて載置プレート上の物品を押し出し、製品コンベヤの収容部内に挿入する。簡単な動作でしかも短時間で物品を集積し製品コンベヤの収容部に挿入するという目的を、前記構成により実現することができる。
【実施例1】
【0012】
以下、図面に示す実施例により本発明を説明する。本発明に係る物品供給装置は、図1に示すように、物品2を供給する供給コンベヤ4、5と、この供給コンベヤ4、5の側部に配置された物品供給手段6、7、8、9と、前記供給コンベヤ4、5によって搬送されてきた物品2を取り出して前記物品供給手段6、7、8、9に受け渡す物品受け渡し手段10、11、12、13と、前記供給コンベヤ4、5と平行に配置され、物品2を収容する収容部14を有する製品コンベヤ16とを備えている。前記物品供給手段6、7、8、9は、受け渡し手段10、11、12、13から受け取った物品2の姿勢を変更し、集積した後に、製品コンベヤ16の収容部14内に挿入する。なお、物品受け渡し手段10、11、12、13は、図2および図3に示すようにロボットであり、図1中に符号を付した円はこれらロボットの可動範囲を示している。また、この実施例では、処理能力を向上させるために、製品コンベヤ16を中央に配置して、その両側に供給コンベヤ4、5を配置し、さらに、各供給コンベヤ4、5の側部にそれぞれ2箇所の物品供給手段6、8および7、9を設け、これら各物品供給手段6、7、8、9に対応して、4台の物品受け渡し手段10、11、12、13を配置している。但し、前記供給コンベヤ4、5、物品供給手段6、7、8、9、物品受け渡し手段10、11、12、13等の数はこの実施例に限定されないことはいうまでもない。
【0013】
各供給コンベヤ4、5は、物品2をランダムな状態で一列で連続的に搬送する。平行して配置された2本の供給コンベヤ4、5の中間に、これら供給コンベヤ4、5と平行して製品コンベヤ16が配置されている。この製品コンベヤ16は、一定の間隔で仕切り板18が設けられており、各仕切板18の間の空間が、所定個数の物品2を収容する収容部14になっている。前記物品受け渡し手段10、11、12、13としてのロボットは、そのハンド20に複数個(この実施例では7個)の物品2を保持する保持部22が一列で設けられている(図3参照)。各保持部22はエアシリンダ24のピストンロッド24aに取り付けられ、エアシリンダ24の作動によって伸縮できるようになっており、各ロボット10、11、12、13に対応して設けられているカメラ25、27、29、31(図1参照)によって物品2の位置、方向等を検出し、同一の方向を向けて1個ずつ物品2を保持する。このロボット10、11、12、13が供給コンベヤ4、5によって搬送されてきた物品2を保持して、物品供給手段6、7、8、9に受け渡す。なお、供給コンベヤ4、5、ロボット10、11、12、13および物品供給手段6、7、8、9は、それぞれ同一の構成なので、そのうちの一つ(供給コンベヤ4、物品供給手段6およびロボット10)についてだけ説明する。
【0014】
物品供給手段6は、図4ないし図6に示すように、前記供給コンベヤ4および製品コンベヤ16の搬送方向に対して直交する方向を向けた複数枚(この実施例では7枚)の細長い載置プレート26(26A、26B、26C、26D、26E、26F、26G)と、これら載置プレート26を、その長手方向の軸線(後に説明する回転軸の軸線)を中心にほぼ90度回転させて物品2の姿勢を変更する姿勢変更手段28(図8、図9および図10参照)と、これら7枚の載置プレート26の間隔を縮小しまたは拡張する拡縮手段30(図7、図8、図9および図10参照)と、載置プレート26上の物品2を押し出して、その前方側(図4の上方側)に位置する製品コンベヤ16の収容部14内に挿入するプッシャ32(図10、図11および図12参照)を備えている。これら載置プレート26、姿勢変更手段28、拡縮手段30およびプッシャ32等はベースプレート34上に載せられて、製品コンベヤ16の搬送方向Aに沿って一体として進退動するようになっている。製品コンベヤ16と平行してアクチュエータ36(図4、図5、図6および図10参照)が配置されている。前記ベースプレート34はこのアクチュエータ36に連結されており、往復移動用サーボモータ38の駆動によって、製品コンベヤ16の搬送方向Aに往復移動する。このベースプレート34が前進(製品コンベヤ16の搬送方向Aに移動)する際には、製品コンベヤ16に追従して等速で移動する。
【0015】
各載置プレート26は、横断面がほぼL字状をしており(図4および図12(a)、(b)、(c)参照)、幅の広い第1載置面26aと幅の狭い第2載置面26bの2つの載置面を有している。前記ロボット10から物品2を受け渡される際には、図12(a)に示すように、第1載置面26aを水平にし、第2載置面26bを直立した状態にしている。また、図12(b)、(c)に示すように、第1載置面26aを直立した状態にし、第2載置面26bを水平な状態にして、載置している物品2の姿勢を変更し、載置プレート26の間隔を縮めた後、プッシャ32によってその物品2を製品コンベヤ16上に押し出すようにしている。なお、この実施例で扱われる物品2は、例えば、ピロー包装されたアイスバーのように、全体がほぼ直方体の形状で幅の広い面(物品の第1の面)と幅の狭い面(物品の第2の面)とを有している。
【0016】
細長い載置プレート26は、ベースプレート34の上方から製品コンベヤ16の方向に伸びており、その基部26c側が、ベースプレート34の上方に配置された支持筒体40にボールベアリングを介して回転自在に支持された回転軸42に連結されている(図10参照)。この回転軸42を回転させることにより、前記載置プレート26を回転させてその第1載置面26aと第2載置面26bの位置を変えることができる。回転軸42の後端部に、この回転軸42の軸線から偏芯させてカムローラ44が連結されている(図8、図9および図10参照)。このカムローラ44は、ベースプレート34に直立して取り付けられた姿勢変更用サーボモータ46によって作動するアクチュエータ48に連結された水平カム50のカム溝に係合している。この水平カム50が下降しているときには(図8および図10参照)、第1載置部26aが水平な状態で、第2載置部26bは直立している(図12(a)に示す状態)。また、水平カム50を上昇させ、カムローラ44を回転させつつ押し上げて(図9参照)回転軸42を回転させたときには(この実施例では90度回転させる)、第1載置部26aが直立した状態で、第2載置部26bが水平な状態になる(図12(b)、(c)に示す状態)。
【0017】
さらに、前記ベースプレート34上には、載置プレート26の間隔を縮め、あるいは拡開する拡縮手段30が設けられている。各載置プレート26に連結されている回転軸42を支持している支持筒体40は、直立した取付部材52の上端に連結されている(図10参照)。ベースプレート34の製品コンベヤ16側の端部(図10の左側の端部)上に直立した壁面54が固定されており、この直立した壁面54の内側に2本の水平なガイドレール56が平行して固定されている。前記支持筒体40が取り付けられている各取付部材52の、製品コンベヤ16側の側面に1箇所のスライダ58が固定され、前記上下のガイドレール56のいずれか一方に係合している。なお、後に説明するように、中央に位置する載置プレート26(26D)は拡縮する際に移動しないので、スライダ58は設けられていない。
【0018】
ベースプレート34上には、大中小3組のベルトによる拡縮用の駆動機構が設けられている。図4ないし図7に示すように、前面側の直立した壁面54とこの壁面54の一部に対向して固定された後方側の直立板部60との間に、駆動軸62が回転自在に支持され、この駆動軸62に、大径の駆動プーリ64、中径の駆動プーリ66および小径の駆動プーリ68が連結されて一体的に回転するようになっている(図4、図6および図7参照)。この駆動軸62は、拡縮用サーボモータ70の駆動を減速機72を介して伝達されて回転される。一方、大中小3個の従動プーリ74、76、78が前記大中小3個の駆動プーリ64、66、68に対応して設置されている。これら従動プーリ74、76、78は、ベースプレート34上にそれぞれ支柱80、82、84を介して(図5参照)、対応する駆動プーリ64、66、68と同一の高さに支持されている。大中小3組の駆動プーリ64、66、68および従動プーリ74、76、78間に、それぞれ載置プレート26の間隔調整用の無端ベルト88、90、92が掛け回されている(図5および図7参照)。
【0019】
前記7枚の載置プレート26(26A、26B、26C、26D、26E、26F、26G)は、中央の第4載置プレート26Dを中心にして、左右両側に3枚ずつ配置されており、これら各プレート26A、26B、26Cと26E、26F、26Gが中央の第4プレート26Dに向かって接近し、また離隔して間隔の調整を行う。従って、最も外側の第1載置プレート26Aと第7載置プレート26Gが最も大きく移動し、第2載置プレート26Bと第6載置プレート26Fが中間の移動量で移動し、最も内側の第3載置プレート26Cと第5載置プレート26Eが最も小さい移動量で移動する。このような動作をさせるために、最も外側の載置プレート26A、26Gが大径プーリ64、74間に掛け回されているベルト88に連結され、最も内側の載置プレート26C、26Eが小径のプーリ68、78に掛け回されているベルト92に連結され、中間の載置プレート26B、26Fが中径のプーリ66、76に掛け回されたベルト90に連結されている。なお、第7番目の載置プレート26Gに隣接して、載置プレート26とほぼ同一形状のガイドプレート93が配置されている(図4および図8の左端のプレート参照)。このガイドプレート93は、プッシャ32で物品2を移送する際に、第7番目の載置プレート26G上の物品2が落下しないようにガイドするものであり、その他の載置プレート26A、26B、26C、26D、26E、26Fでは隣接する載置プレートがそれぞれガイドするために設けられていない(図12(c)参照)。
【0020】
前記各載置プレート26(26A、26B、26C、26D、26E、26F、26G)に連結されている回転軸42を支持する支持筒体40は、前述のようにそれぞれ直立した取付部材52に支持されており、この直立部材52に、前記ガイドレール56に嵌合するスライダ58が固定されるとともに、L字状の取り付けプレート94を介して、前記大中小の各プーリ64、74、66、76、68、78に掛け回されている前記ベルト88、90、92のいずれかに連結されている(図13ないし図18参照)。
【0021】
7枚の載置プレート26(26A、26B、26C、26D、26E、26F、26G)のうち、物品搬送方向Aの最も上流側に位置する第1載置プレート26A(図4の一番右側に位置する載置プレートおよびこの載置プレート26Aに連結されている図8の一番右側に位置するスライダ58A参照)は、大径プーリ64、74に掛け回されているベルト88の上部側に連結されている(図13参照)。なお、図8および図9には、ガイドレール56に嵌合しているスライダ58が示されているので、各載置プレート26(26A、26B、26C、26E、26F、26G)に対応するスライダ58(58A、58B、58C、58E、58F、58G)によってその位置を説明する。また、物品搬送方向Aの最も下流側に位置する第7載置プレート26G(図4の一番左側に位置する載置プレートおよび図8の一番左側に位置するスライダ58G参照)は、大径プーリ64、74に掛け回されているベルト88の下部側に連結されている(図14参照)。
【0022】
物品搬送方向Aの上流側から2番目に位置する第2載置プレート26B(図4の右から2番目に位置する載置プレートおよび図8の右から2番目に位置するスライダ58B参照)は、中径プーリ66、76に掛け回されているベルト90の上部側に連結されている(図15参照)。また、物品搬送方向Aの下流側から2番目に位置する第6載置プレート26F(図4の左から2番目に位置する載置プレートおよび図8の左から2番目に位置するスライダ58B参照)は、中径プーリ66、76に掛け回されているベルト90の下部側に連結されている(図16参照)。
【0023】
物品搬送方向Aの上流側から3番目に位置する第3載置プレート26C(図4の右から3番目に位置する載置プレートおよび図8の右から3番目に位置するスライダ58C参照)は、小径プーリ68、78に掛け回されているベルト92の上部側に連結されている(図17参照)。また、物品搬送方向Aの下流側から3番目に位置する第5載置プレート26E(図4の左から3番目に位置する載置プレートおよび図8の左から3番目に位置するスライダ58E参照)は、小径プーリ68、78に掛け回されているベルト92の下部側に連結されている(図18参照)。なお、前記各載置プレート26(26A、26B、26C、26E、26F、26G)とスライダ58(58A、58B、58C、58E、58F、58G)とを連結する直立した取付部材52は、他のスライダ58と干渉しないように隙間が形成されている。
【0024】
ロボット10から物品供給手段6の載置プレート26上に受け渡された物品2は、載置プレート26をほぼ90度回転させて姿勢を変更された後、拡縮手段30によって互いの間隔を縮められてから、プッシャ32によって載置プレート26上から押し出されて製品コンベヤ16の収容部14内に挿入される。この物品押し出し用のプッシャ32は、前記ベースプレート34の上方に配置されたプッシャ用プレート96上に設置されている(図4、図10、図11および図12(a)参照)。ベースプレート34は、その長手方向を製品コンベヤ16の搬送方向Aに向けてアクチュエータ36に連結され、製品コンベヤ16の搬送方向Aに進退動するようになっており、プッシャ用プレート96は、その長手方向を製品コンベヤ16の搬送方向Aと直交する方向を向けて、ベースプレート34上に固定されている(図4および図10参照)。
【0025】
プッシャ用プレート96上の先端部寄り(製品コンベヤ16寄り)に二組のガイドブロック98が固定され、これらガイドブロック98に2本の平行なスライドロッド100が進退動可能に支持されている。さらにこれらスライドロッド100の下方に配置された取付ロッド102が、前記各ガイドブロック98の下方に進退動可能に支持されている。これらスライドロッド100と取り付けロッド102の先端にプッシャ32が固定されている。このプッシャ32は、前記各ロッド100、102の先端面に下方を向けて垂直に固定されている。プッシャ32は、前記載置プレート26上に載せられた物品2が、90度回転されて立てた状態になり、かつ、間隔を縮めた状態の時に、各載置プレート26上の物品2を押し出せるようになっている。従って、載置プレート26の第2載置面26bを水平にして接近させた状態の時に、直立している第1載置面26aの間を通過できるような幅の櫛歯状になっている(図12(c)参照)。
【0026】
平行な2本のスライドロッド100の中間に、プッシャ32を進退動させる無端状のベルト104が配置されている。プッシャ用プレート96の後端(供給コンベヤ4側の端部)に設置されたプッシャ駆動用サーボモータ106の出力軸108に駆動プーリ110が連結され、この駆動プーリ110とプッシャ用プレート96の先端部上に設置された従動プーリ112との間に前記無端状ベルト104が掛け回されている。このベルト104に連結部材116を介して前記スライドロッド100が連結されている。前記サーボモータ106の駆動によりベルト104が走行し、スライドロッド100および取り付けロッド102を介してプッシャ32が進退動する。このプッシャ32は、前記載置プレート26上の物品2を載置する第1および第2載置部26a、26bよりも後方側の位置から(図10に示す位置)、載置プレート26の先端よりも前方の、物品2を製品コンベヤ16上に押し出すことができる位置(図11に示す位置)の間で往復動するようになっている。
【0027】
以上の構成に係る物品供給装置の作動について説明する。供給コンベヤ4によって物品2がランダムな状態で連続的に搬送される。物品供給手段6および物品受け渡し手段としてのロボット10が設置されている位置のやや上流側に、物品2の位置、方向等を検出するカメラ25が設置されており、搬送されてくる物品2を1個ずつ撮影する。このカメラ25からの情報に応じて7個の保持部22を有するロボットハンド20が、各物品2を同じ方向に揃えながら順次保持する。保持部22に7個の物品2を保持したロボット10が、これらの物品2を物品供給手段6の各載置プレート26上に載置する。このとき載置プレート26は、幅の広い第1載置部26aを水平にし、幅の狭い第2載置部26bを直立した状態にしており、物品2は幅の広い面(第1の面)を上下に位置させて第1載置部26a上に載せられる。
【0028】
載置プレート26上に載せられた物品2は、姿勢変更手段28によってその姿勢を変更される。載置プレート26は、その基部側に連結されている回転軸42が支持筒40内で回転できるようになっており、回転軸42の後端部にこの回転軸42の軸線から偏芯して連結されているカムローラ44を上昇させることにより、載置プレート26をほぼ90度回転させることができる。カムローラ44は、水平カム50のカム溝内に嵌合しており、姿勢変更用サーボモータ46によってアクチュエータ48が作動して水平カム50を上昇させることによりカムローラ44を所定高さまで上昇させつつ回転させる。カムローラ44の上昇に伴って回転軸42が回転し、さらにこの回転軸42に連結されている載置プレート26が回転する。載置プレート26は、ロボット10の保持部22から物品2が載置される時点では、図12(a)に示すように、幅の広い第1載置部26aが水平な状態で、幅の狭い第2載置部26bが直立した状態になっている。載置プレート26が90度回転されると、図12(b)に示すように、第1載置部26aが直立した状態になるとともに第2載置部26bが水平になる。従って、幅の広い面(第1の面)を上下に位置させて第1載置部26aに載っていた物品2は、幅の広い面が両サイドに位置し、第2載置面26b上に幅の狭い面(第2の面)が上下に位置した状態になる。
【0029】
続いて、各第2載置部26b上で幅の狭い面(第2の面)を上下にして立ち上げた状態になっている物品2を、拡縮手段30によって互いに接近させる。7枚の載置プレート26(26A、26B、26C、26D、26E、26F、26G)のうち、中央の載置プレート26Dはその位置で移動しないように固定されており、その他の6本の載置プレート26A、26B、26C、26E、26F、26Gは、それぞれ大径プーリ64、74、中径プーリ66、76および小径プーリ68、78に掛け回されたベルト88、90、92の所定の位置に連結されている(図13〜図18参照)。従って、拡縮用サーボモータ70によって駆動軸62に連結されている大中小の駆動プーリ64、66、68を回転させることにより、最も外側の載置プレート26A、26G(図8および図9の対応するスライダ58A、58G参照)が最も大きく内側へ向かって移動し、その内側の載置プレート26B、26F(図8および図9のスライダ58B、58F参照)が外側の載置プレート26A、26Gよりも少ない距離だけ移動し、最も内側の載置プレート26C、26E(図8および図9のスライダ58C、58E参照)は最も少ない距離だけ移動し、すべての載置プレート26(26A、26B、26C、26D、26E、26F、26G)がほぼ等距離で接近した状態になる(図12(c)の状態)。
【0030】
拡縮手段30によって載置プレート26(26A、26B、26C、26D、26E、26F、26G)を接近させることにより、各載置プレート26上に載置されている物品2を接近させて集積した状態にした後、これら物品2をプッシャ32によって押し出して製品コンベヤ16の収容部14へ移動させる。製品コンベヤ16は連続的に走行しており、ベースプレート34上に設置されている物品供給手段6全体を製品コンベヤ16の走行に追従させて搬送方向Aへ移動させつつ、プッシャ32によって各物品2を押し出すようにしている。
【0031】
ベースプレート34は、往復移動用サーボモータ38によって作動するアクチュエータ36に連結されて移動する。また、このベースプレート34の移動中に、プッシャ32が作動して物品2を製品コンベヤ16の収容部14内に挿入する。プッシャ32は、作動開始時には物品2が載置されている載置プレート26よりも後方に位置しており(図10参照)、プッシャ駆動用サーボモータ106の駆動によって製品コンベヤ16方向へ前進し各載置プレート26(26A、26B、26C、26D、26E、26F、26G)上の物品2を収容部14内に押し込む(プッシャ32は図11の位置まで移動する)。プッシャ32は、7枚の載置プレート26(26A、26B、26C、26D、26E、26F、26G)が姿勢を変更され、かつ、間隔を収縮された状態で、各載置プレート26(26A、26B、26C、26D、26E、26F、26G)の間を通過できるような形状の櫛歯状をしており(図12(a)、(c)参照)、載置プレート26に干渉することなくスムーズに前進することができる。製品コンベヤ16に設けられている収容部14は、搬送方向の前後を仕切り板18によって区画されており、収容された物品2は、幅の狭い面(第2の面)を上下にした状態でも安定して搬送することができる。
【0032】
物品2を製品コンベヤ16の収容部14内に挿入した後、プッシャ32は載置プレート26の後方側へ後退し、ベースプレート34は製品コンベヤ16の上流側に後退して、次の物品2がロボット10により受け渡されるまで待機する。なお、前記実施例では、載置プレート26を90度回転させて物品2の姿勢を変更したが、必ずしも90度回転させて物品2を立ち上げた状態にするものに限らず、その他の回転量で姿勢を変更することもできる。例えば、各物品2を斜めにして順次重ね合わせるようにしてもよい。この場合には、プッシャ32等のアタッチメント部品を変更する必要がある。また、前記実施例では、製品コンベヤ16に仕切り板18を設けて、等間隔で複数の収容部14を有する構成としたが、カートンコンベヤによって搬送される起函されたカートン内に物品を押し込む構成であってもよい。
【符号の説明】
【0033】
2 物品
6 物品供給手段
10 受け渡し手段(ロボット)
14 収容部
16 コンベヤ(製品コンベヤ)
26 プレート(載置プレート)
28 姿勢変更手段
30 拡縮手段
32 プッシャ
【特許請求の範囲】
【請求項1】
物品を収容する収容部を有するコンベヤと、このコンベヤの側方に配置され、物品を載置する複数のプレートおよびプレート上の物品を前記コンベヤの収容部に押し出すプッシャを有する物品供給手段と、前記プレートに物品を受け渡す物品受け渡し手段とを備え、
前記物品供給手段に、前記プレートを回転させて載置されている物品の姿勢を変更する姿勢変更手段と、各プレート上の物品の間隔を変更する拡縮手段を設け、
前記プレートに載置された物品の姿勢を変更するとともに、その間隔を縮めた後、前記収容部へ押し出すことを特徴とする物品供給装置。
【請求項2】
前記プレートに、物品の第1の面を支持する第1載置面と、物品の第2の面を支持する第2載置面とを形成し、前記第1載置面の幅を第2載置面の幅よりも広く設定するとともに、前記第1載置面と第2載置面とをほぼL字状に配置したことを特徴とする請求項1に記載の物品供給装置。
【請求項3】
前記物品供給手段を、前記コンベヤの搬送方向に沿って、このコンベヤに同期して移動可能に構成し、物品供給手段をコンベヤに同期して前進させつつ、プッシャによってプレート上の物品をコンベヤの収容部へ押し出すことを特徴とする請求項1または請求項2に記載の物品供給装置。
【請求項1】
物品を収容する収容部を有するコンベヤと、このコンベヤの側方に配置され、物品を載置する複数のプレートおよびプレート上の物品を前記コンベヤの収容部に押し出すプッシャを有する物品供給手段と、前記プレートに物品を受け渡す物品受け渡し手段とを備え、
前記物品供給手段に、前記プレートを回転させて載置されている物品の姿勢を変更する姿勢変更手段と、各プレート上の物品の間隔を変更する拡縮手段を設け、
前記プレートに載置された物品の姿勢を変更するとともに、その間隔を縮めた後、前記収容部へ押し出すことを特徴とする物品供給装置。
【請求項2】
前記プレートに、物品の第1の面を支持する第1載置面と、物品の第2の面を支持する第2載置面とを形成し、前記第1載置面の幅を第2載置面の幅よりも広く設定するとともに、前記第1載置面と第2載置面とをほぼL字状に配置したことを特徴とする請求項1に記載の物品供給装置。
【請求項3】
前記物品供給手段を、前記コンベヤの搬送方向に沿って、このコンベヤに同期して移動可能に構成し、物品供給手段をコンベヤに同期して前進させつつ、プッシャによってプレート上の物品をコンベヤの収容部へ押し出すことを特徴とする請求項1または請求項2に記載の物品供給装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−162351(P2012−162351A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−23024(P2011−23024)
【出願日】平成23年2月4日(2011.2.4)
【出願人】(000253019)澁谷工業株式会社 (503)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成23年2月4日(2011.2.4)
【出願人】(000253019)澁谷工業株式会社 (503)
【Fターム(参考)】
[ Back to top ]