
物品保管設備及び物品保管設備における物品積付け方法
【課題】パレットとして、設定上限重量で物品を積み付けて収納部に収納した際の下方側の撓み量が、許容限度内となるパレットと、許容限度を超えるパレットとを使用しながらも、保管棚の収納効率の低下を抑制することができる物品保管設備を提供する。
【解決手段】物品BをパレットPに段積み状態に積み付ける積付け部Dが、難撓みパレットに物品を積み付けるときには、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて物品を積付け、かつ、易撓みパレットに物品を積み付けるときには、設定上限高さ以下でかつ設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品を積み付けるように構成されている。
【解決手段】物品BをパレットPに段積み状態に積み付ける積付け部Dが、難撓みパレットに物品を積み付けるときには、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて物品を積付け、かつ、易撓みパレットに物品を積み付けるときには、設定上限高さ以下でかつ設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品を積み付けるように構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて、物品をパレットに段積み状態に積み付ける積付け部と、前記パレットを載置支持する複数の収納部が並設された保管棚と、前記積付け部にて物品が積み付けられた前記パレットを前記収納部に収納し、かつ、前記収納部に収納した前記パレットを搬出すべく前記パレットを搬送する搬送手段と、前記搬送手段の作動を制御する制御手段とが設けられ、
前記搬送手段が、前記収納部の外方に引退する引退状態と前記収納部内に突出する突出状態とに出退駆動自在で且つ昇降駆動自在な物品載置体にて、前記パレットを前記収納部に収納する降ろし処理及び前記収納部に収納した前記パレットを取り出す掬い処理を行うように構成され、
前記収納部が、前記突出状態の前記物品載置体が上下に通過する間隔を隔てる状態で並置された左右一対の支持体にて、前記パレットの両端部を載置支持するように構成され、
前記制御手段が、前記降ろし処理を行うときには、前記左右一対の支持体よりも高い降ろし用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記左右一対の支持体よりも低い降ろし用目標高さに前記物品載置体を下降させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御し、かつ、前記掬い処理を行うときには、前記降ろし用目標高さに相当する掬い用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記降ろし用基準高さに相当する掬い用目標高さに前記物品載置体を上昇させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御するように構成されている物品保管設備、及び、その物品保管設備における物品積付け方法に関する。
【背景技術】
【0002】
パレットを載置支持する複数の収納部が並設された保管棚を備える物品保管設備に物品を保管する場合には、積付け部にてパレットに物品を積み付けて、物品が積み付けられたパレットを、スタッカークレーン等の搬送手段にて搬送して、収納部に収納することになる(例えば、特許文献1参照。)。
ちなみに、特許文献1においては、物品としてのコンテナをパレットに積み付けることが例示されている。
【0003】
スタッカークレーン等の搬送手段は、収納部の外方に引退する引退状態と収納部内に突出する突出状態とに出退駆動自在で且つ昇降駆動自在な物品載置体を備えて、パレットを収納部に収納する降ろし処理及び収納部に収納したパレットを取り出す掬い処理を行うように構成され、また、収納部が、突出状態の物品載置体が上下に通過する間隔を隔てる状態で並置された左右一対の支持体にて、パレットの両端部を載置支持するように構成されることになる。
【0004】
そして、搬送手段の作動を制御する制御手段が、降ろし処理を行うときには、左右一対の支持体よりも高い降ろし用基準高さにて物品載置体を突出状態に突出させ、次に、左右一対の支持体よりも低い降ろし用目標高さに物品載置体を下降させ、その後、物品載置体を引退状態に引退させるべく、搬送手段の作動を制御し、かつ、掬い処理を行うときには、降ろし用目標高さに相当する掬い用基準高さにて物品載置体を突出状態に突出させ、次に、降ろし用基準高さに相当する掬い用目標高さに物品載置体を上昇させ、その後、物品載置体を引退状態に引退させるべく、搬送手段の作動を制御するように構成されている(例えば、特許文献2参照。)。
【0005】
上記特許文献1及び特許文献2には記載されていないが、パレットに物品を積み付ける際には、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて、物品をパレットに段積み状態に積み付けることが行われることになる。
つまり、保管棚の耐荷重やパレットの耐荷重等に基づいて、パレットに物品を積み付ける際の設定上限重量が定められることになる。
また、降ろし処理や掬い処理を行う際に、降ろし用目標高さ及び掬い用基準高さの物品載置体が、下方の収納部に収納されている物品の上面から設定融通距離(例えば、15mm)以上離れる状態となるように、パレットに物品を積み付ける際の設定上限高さが定められることになる。
【0006】
説明を加えると、一般には、特許文献2において図示されているように、保管棚の棚前後方向に並ぶ一対の柱からなる柱組が、保管棚の棚横幅方向に並べて床面部に立設され、且つ、柱組の夫々に、支持体が棚横幅方向に向けて片持ち状に突出する状態で上下方向に並べて設けられて、棚横幅方向に隣接して並ぶ柱組の間に、収納部が上下方向に並ぶ状態に形成される形態で、保管棚が構成されることになる。
【0007】
そして、上下方向に並ぶ支持体の隣接するもの同士の間隔が、物品が設定上限高さとなるように積み付けられたパレットが収納されている収納部の上方の収納部に対して、降ろし処理や掬い処理を行う際に、降ろし用目標高さ及び掬い用基準高さの物品載置体が下方の収納部に収納されている物品の上面から設定融通距離(例えば、25mm)以上離れる状態となるように定められて、降ろし用目標高さ及び掬い用基準高さに対する物品載置体の停止位置が多少ずれることや、物品載置体が上下に振動するようなことがあっても、物品載置体が物品に接当する等のトラブルの発生を回避するようになっている。
【0008】
また、パレットは、収納部に収納されたときには、左右の支持体にて左右両端部が載置支持されるため、左右の支持体の間に位置する部分が、積み付けられた物品の重量にて下方側に撓むことになり、そして、その下方側の撓み量は、設定上限重量以下で物品を積み付けたときには、許容限度内(例えば、10mm内)となるように構成される。
そして、降ろし用目標高さ及び掬い用基準高さの物品載置体と支持体に載置したパレットの下面との間には、20mm程度の余裕間隔を隔てる必要があるため、降ろし用目標高さ及び掬い用基準高さが、パレットの下方側の撓み量を考慮して定められることになり、結果的に、上下方向に並ぶ支持体の隣接するもの同士の間隔は、パレットの下方側の撓み量をも考慮して定められることになる。
【0009】
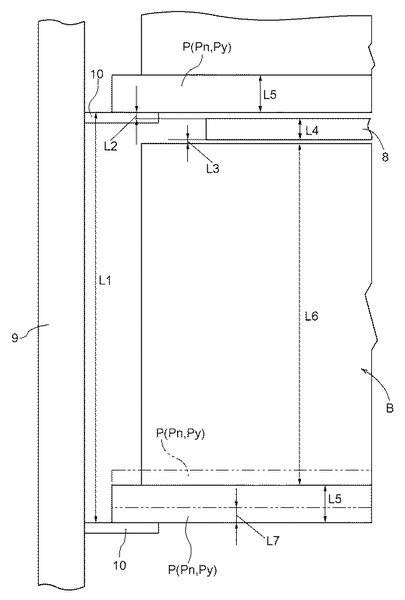
例えば、物品載置体を降ろし処理のために降ろし用目標高さにて収納部内に突出させた状態を例にして説明すると、図4に示すように、上下方向に並ぶ支持体の隣接するもの同士の間隔L1は、下方の収納部に収納されたパレットの厚みL5、そのパレットに段積みされる物品の高さの最大高さに相当する設定上限高さL6、その物品の上面と物品載置体の下面との間隔である設定融通距離L3、物品載置体の厚みL4、及び、物品載置体の上面と収納対象の収納部の支持体の上面との間の離間距離L2を加えた値になる。そして、離間距離L2は、パレットの下方側への撓み量と、降ろし用目標高さ及び掬い用基準高さの物品載置体と支持体に載置したパレットの下面との間の余裕間隔を加えた値となる。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平5−262407号公報
【特許文献2】特開2000−229706号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
物品保管設備に使用するパレットは、上述の如く、設定許容条件における設定上限重量以下となるように物品を積み付ければ、その下方側の撓み量が許容限度内となるものであるが、パレットとして、設定許容条件における設定上限重量で物品を積み付けても、その下方側の撓み量が許容限度を超えるパレットを使用することが望まれる場合がある。
【0012】
例えば、物品保管設備を設置する際に、その設置箇所に、以前から使用されているパレットが存在する場合があり、このような場合には、物品保管設備を設置するためのイニシャルコストの低下を図るべく、以前から使用されているパレットを保管棚にて保管するパレットとして使用することになるが、この以前から使用されているパレットが、設定許容条件における設定上限重量で物品を積み付けても、その下方側の撓み量が許容限度を超える場合がある。
【0013】
したがって、物品保管設備に使用されるパレットとしては、設定許容条件における設定上限重量以下となるように物品を積み付ければ、その下方側の撓み量が許容限度内となるパレット(以下、難撓みパレットと略称する)と、設定許容条件における設定上限重量で物品を積み付けても、その下方側の撓み量が許容限度を超えるパレット(以下、易撓みパレットと略称する)とが存在することになる。
【0014】
そして、易撓みパレットにも、単に、設定許容条件における設定上限重量以下となるように物品を積み付ければ、その下方側の撓み量が、例えば30mmになる等、許容限度(例えば、10mm)を超える場合が存在することになる。
このような場合には、降ろし処理における降ろし用目標高さ、及び、掬い処理における掬い用基準高さを、易撓みパレットの下方側への撓み量の最大値に基づいて定めて、それに合わせて、上下方向に並ぶ支持体の隣接するもの同士の間隔を定めた形態で保管棚を構成することが考えられる。
【0015】
ちなみに、易撓みパレットの下方側への撓み量が最大となるのは、設定許容条件における設定上限重量にて易撓みパレットにて物品を積み込んだときであり、そして、降ろし用目標高さ及び掬い用基準高さを、易撓みパレットの下方側への撓み量の最大値に基づいて定めるとは、下方側への撓み量が最大となる易撓みパレットを収納部の支持体にて支持した状態において、そのパレットの下面から余裕間隔(例えば、15mm)だけ下方に位置する高さに、降ろし用目標高さ及び掬い用基準高さを定めることを意味するものである。
【0016】
しかしながら、降ろし用目標高さ及び掬い用基準高さを易撓みパレットの下方側への撓み量の最大値に基づいて定め、それに合わせて、上下方向に並ぶ支持体の隣接するもの同士の間隔を定めた形態で保管棚を構成すると、上下方向に並ぶ支持体の隣接するもの同士の間隔が、難撓みパレットの撓み量に鑑みて保管棚を構成する場合に較べて、大きくなるため、保管棚の収納効率が低下する不都合があった。
【0017】
本発明は、上記実状に鑑みて為されたものであって、その目的は、パレットとして、設定上限重量で物品を積み付けて収納部に収納した際の下方側の撓み量が、許容限度内となるパレットと、許容限度を超えるパレットとを使用しながらも、保管棚の収納効率の低下を抑制することができる物品保管設備を提供する点にある。
【課題を解決するための手段】
【0018】
本発明の物品保管設備は、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて、物品をパレットに段積み状態に積み付ける積付け部と、前記パレットを載置支持する複数の収納部が並設された保管棚と、前記積付け部にて物品が積み付けられた前記パレットを前記収納部に収納し、かつ、前記収納部に収納した前記パレットを搬出すべく前記パレットを搬送する搬送手段と、前記搬送手段の作動を制御する制御手段とが設けられ、
前記搬送手段が、前記収納部の外方に引退する引退状態と前記収納部内に突出する突出状態とに出退駆動自在で且つ昇降駆動自在な物品載置体にて、前記パレットを前記収納部に収納する降ろし処理及び前記収納部に収納した前記パレットを取り出す掬い処理を行うように構成され、
前記収納部が、前記突出状態の前記物品載置体が上下に通過する間隔を隔てる状態で並置された左右一対の支持体にて、前記パレットの両端部を載置支持するように構成され、
前記制御手段が、前記降ろし処理を行うときには、前記左右一対の支持体よりも高い降ろし用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記左右一対の支持体よりも低い降ろし用目標高さに前記物品載置体を下降させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御し、かつ、前記掬い処理を行うときには、前記降ろし用目標高さに相当する掬い用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記降ろし用基準高さに相当する掬い用目標高さに前記物品載置体を上昇させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御するように構成されているものであって、その第1特徴構成は、
前記パレットとして、前記収納部に収納したときの下方側への撓み量が、前記設定上限重量で物品を積付けると、許容限度内となる難撓みパレットと、前記設定上限重量で物品を積付けると、前記許容限度を超える易撓みパレットとがあり、
前記積付け部が、前記難撓みパレットに物品を積み付けるときには、前記設定許容条件にて物品を積付け、かつ、前記易撓みパレットに物品を積み付けるときには、前記設定上限高さ以下でかつ前記設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品を積み付けるように構成されている点を特徴とする。
【0019】
すなわち、パレットとして、収納部に収納したときの下方側への撓み量が、設定上限重量で物品を積付けると、許容限度内となる難撓みパレットと、設定上限重量で物品を積付けると、許容限度を超える易撓みパレットとが存在する。
【0020】
そして、積付け部が、難撓みパレットに物品を積み付けるときには、設定許容条件にて物品を積付け、かつ、易撓みパレットに物品を積み付けるときには、設定上限高さ以下でかつ設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品を積み付けることになる。
【0021】
このように、易撓みパレットに物品を積み付けるときには、積付け部が易撓みパレット用設定条件にて物品を積み付けるものであるから、易撓みパレット用設定条件における易撓みパレット用上限重量として、その易撓みパレット用上限重量にて物品を易撓みパレットに積み付けたときに、易撓みパレットの下方側への撓み量が上述した許容限度内となる重量に設定しておくことにより、易撓みパレットの撓み量を、上述した許容限度内に収めることができる。
【0022】
したがって、難撓みパレット及び易撓みパレットのいずれにおいても、収納部に収納したときの下方側の撓み量が、上述した許容限度内となるから、保管棚に備えさせる収納部を、下方側への撓み量が許容限度内となるパレットを収納するのに適する形態で形成できるため、保管棚に備えさせる収納部を、上述した許容限度を超えるパレットを収納するのに適する形態で形成するのに較べて、保管棚の収納効率の低下を抑制できるものとなる。
【0023】
要するに、本発明の第1特徴構成によれば、パレットとして、設定上限重量で物品を積み付けて収納部に収納した際の下方側の撓み量が、許容限度内となるパレットと、許容限度を超えるパレットとを使用しながらも、保管棚の収納効率の低下を抑制することができる物品保管設備を提供できる。
【0024】
本発明の物品保管設備の第2特徴構成は、上記第1特徴構成に加えて、
前記保管棚が、棚前後方向に並ぶ一対の柱からなる柱組を、前記保管棚の棚横幅方向に並べて床面部に立設し、且つ、前記柱組の夫々に、前記支持体を前記棚横幅方向に向けて片持ち状に突出する状態で上下方向に並べて設けて、前記収納部を棚横幅方向に隣接して並ぶ前記柱組の間に上下方向に並ぶ状態に形成する状態に構成され、
前記上下方向に並ぶ前記収納部における上下に隣接する前記収納部の夫々が装備する前記支持体の上下方向の間隔が、収納対象の収納部の下方の収納部に前記設定上限高さの物品を積んだ前記パレットが収納された状態において、収納対象の収納部に対して前記降ろし処理を行うために、前記物品載置体を前記下方側への撓み量が前記許容限度内となる前記パレットについての前記降ろし用目標高さに位置させたときには、前記物品載置体が下方の収納部に収納されている物品の上面から設定融通距離を離れる間隔に定められている点を特徴とする。
【0025】
すなわち、保管棚が、棚横幅方向に隣接して並ぶ柱組の間に、収納部が上下方向に並ぶ状態に形成される形態で構成されることになる。
そして、上下方向に並ぶ収納部における上下に隣接する収納部の夫々が装備する支持体の上下方向の間隔が、収納対象の収納部の下方の収納部に設定上限高さの物品を積んだパレットが収納された状態において、収納対象の収納部に対して降ろし処理を行うために、物品載置体を下方側への撓み量が許容限度内となるパレットについての降ろし用目標高さに位置させたときには、物品載置体が下方の収納部に収納されている物品の上面から設定融通距離を離れる間隔に定められている。
【0026】
つまり、難撓みパレット及び易撓みパレットのいずれにおいても、収納部に収納したときの下方側の撓み量が、上述した許容限度内となる点に鑑みて、上下方向に並ぶ収納部における上下に隣接する収納部の夫々が装備する支持体の上下方向の間隔を、収納対象の下方の収納部に設定上限高さの物品を積んだパレットが収納された状態において、収納対象の収納部に対して降ろし処理及び掬い処理を行うために、物品載置体を下方側への撓み量が許容限度内となるパレットについての降ろし用目標高さ及び掬い用基準高さに位置させたときには、物品載置体が下方の収納部に収納されている物品の上面から設定融通距離を離れる間隔に定めるものであるから、降ろし処理及び掬い処理を行うために、降ろし用目標高さ及び掬い用基準高さに位置させた物品載置体が、下方の収納部に収納した物品に接当する等のトラブルを回避しながらも、棚横幅方向に隣接して並ぶ柱組の間に上下方向に並ぶ状態で形成される収納部を、極力密な状態で備えさせることができるのであり、パレットとして、難撓みパレット及び易撓みパレットを用いながらも、保管棚の収納効率の低下を的確に抑制できる。
【0027】
要するに、本発明の第2特徴構成によれば、上記第1特徴構成による作用効果に加えて、棚横幅方向に隣接して並ぶ柱組の間に上下方向に並ぶ状態に収納部を形成する形態で保管棚を構成する場合において、保管棚の収納効率の低下を的確に抑制できる物品保管設備を提供できる。
【0028】
本発明の物品保管設備における物品積付け方法は、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて、物品をパレットに段積み状態に積み付ける積付け部と、前記パレットを載置支持する複数の収納部が並設された保管棚と、前記積付け部にて物品が積み付けられた前記パレットを前記収納部に収納し、かつ、前記収納部に収納した前記パレットを搬出すべく前記パレットを搬送する搬送手段と、前記搬送手段の作動を制御する制御手段とが設けられ、
前記搬送手段が、前記収納部の外方に引退する引退状態と前記収納部内に突出する突出状態とに出退駆動自在で且つ昇降駆動自在な物品載置体にて、前記パレットを前記収納部に収納する降ろし処理及び前記収納部に収納した前記パレットを取り出す掬い処理を行うように構成され、
前記収納部が、前記突出状態の前記物品載置体が上下に通過する間隔を隔てる状態で並置された左右一対の支持体にて、前記パレットの両端部を載置支持するように構成され、
前記制御手段が、前記降ろし処理を行うときには、前記左右一対の支持体よりも高い降ろし用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記左右一対の支持体よりも低い降ろし用目標高さに前記物品載置体を下降させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御し、かつ、前記掬い処理を行うときには、前記降ろし用目標高さに相当する掬い用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記降ろし用基準高さに相当する掬い用目標高さに前記物品載置体を上昇させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御するように構成されている物品保管設備における物品積付け方法であって、
前記パレットとして、前記収納部に収納したときの下方側への撓み量が、前記設定上限重量で物品を積付けると、許容限度内となる難撓みパレットと、前記設定上限重量で物品を積付けると、前記許容限度を超える易撓みパレットとがあり、
前記積付け部において、前記難撓みパレットに物品を積み付けるときには、前記設定許容条件にて物品を積付け、かつ、前記易撓みパレットに物品を積み付けるときには、前記設定上限高さ以下でかつ前記設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品をパレットに段積み状態に積み付けるようにする点を特徴とする。
【0029】
すなわち、パレットとして、収納部に収納したときの下方側への撓み量が、設定上限重量で物品を積付けると、許容限度内となる難撓みパレットと、設定上限重量で物品を積付けると、許容限度を超える易撓みパレットとが存在する。
【0030】
そして、積付け部において、難撓みパレットに物品を積み付けるときには、設定許容条件にて物品を積付け、かつ、易撓みパレットに物品を積み付けるときには、設定上限高さ以下でかつ設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品を積み付けることになる。
【0031】
このように、易撓みパレットに物品を積み付けるときには、積付け部が易撓みパレット用設定条件にて物品を積み付けるものであるから、易撓みパレット用設定条件における易撓みパレット用上限重量として、その易撓みパレット用上限重量にて物品を易撓みパレットに積み付けたときに、易撓みパレットの下方側への撓み量が上述した許容限度内となる重量に設定しておくことにより、易撓みパレットの撓み量を、上述した許容限度内に収めることができる。
【0032】
したがって、難撓みパレット及び易撓みパレットのいずれにおいても、収納部に収納したときの下方側の撓み量が、上述した許容限度内となるから、保管棚に備えさせる収納部を、下方側への撓み量が許容限度内となるパレットを収納するのに適する形態で形成できるため、保管棚に備えさせる収納部を、上述した許容限度を超えるパレットを収納するのに適する形態で形成するのに較べて、保管棚の収納効率の低下を抑制できるものとなる。
【0033】
要するに、本発明の物品保管設備における物品積付け方法によれば、パレットとして、設定許容条件における設定上限重量で物品を積み付けて収納部に収納した際の下方側の撓み量が、許容限度内となるパレットと、許容限度を超えるパレットとを使用しながらも、保管棚の収納効率の低下を抑制することができる物品保管設備における物品積付け方法を提供できる。
【図面の簡単な説明】
【0034】
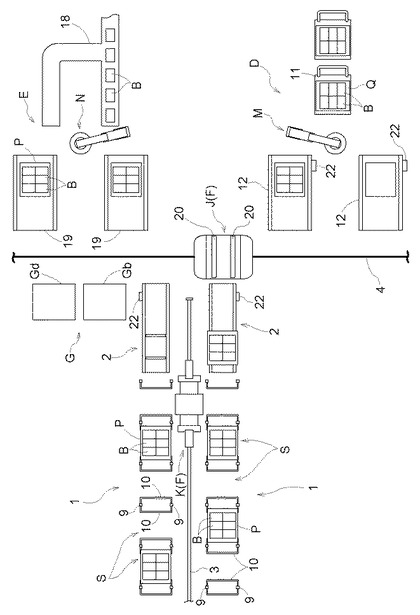
【図1】物品保管設備の概略平面図
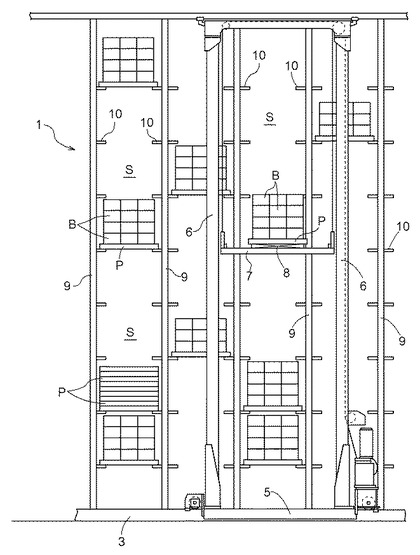
【図2】保管棚の側面図
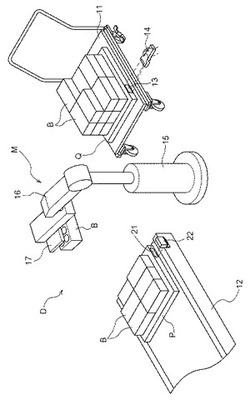
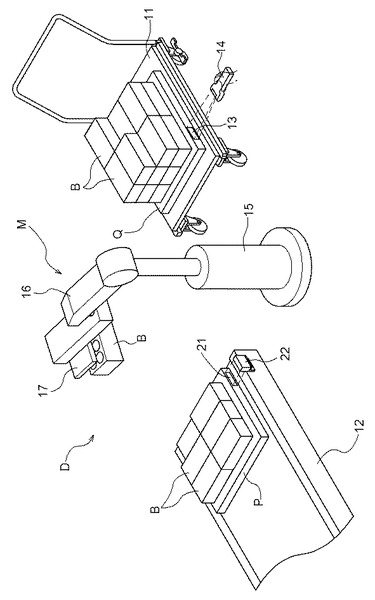
【図3】積付け部の概略斜視図
【図4】収納部に収納されたパレットとフォークとの関係を示す概略正面図
【図5】制御構成を示すブロック図
【図6】積付け部の制御作動を示すフローチャート
【発明を実施するための形態】
【0035】
次に、本発明の実施形態を図面に基づいて説明する。
図1に示すように、外部から搬入される物品BをパレットPに段積み状態に積み付ける積付け部D、物品Bが積み付けられたパレットPを載置支持する複数の収納部Sが並設された保管棚1、パレットPから物品Bを取り出して外部に搬出する物品搬出部E、積付け部Dにて物品Bが積み付けられたパレットPを収納部Sに収納しかつ収納部Sに収納したパレットPを物品搬出部Eに搬出すべくパレットPを搬送する搬送手段F、及び、空のパレットPの段積み処理及び段ばらし処理を行うパレット処理部Gが装備されて、搬入された物品BをパレットPに段積みした状態で収納部Sに収納し、パレットPに段積みされた物品BをパレットPから取り出して外部に搬出する物品保管設備が構成されている。
【0036】
保管棚1が、物品出し入れ方向を互いに対向させた状態で、間隔を隔てて左右一対設置され、それら左右一対の保管棚1の横側脇に、左右一対の入出庫コンベヤ2が設置されている。
左右一対の保管棚1の間の床面に設置された走行レール3にて案内されて、保管棚1の横幅方向に沿って移動自在なスタッカークレーンKが設けられ、また、積付け部D、入出庫コンベヤ2、物品搬出部E及びパレット処理部Gを経由する走行ライン4に沿って走行自在な搬送台車Jが設けられている。
ちなみに、本実施形態においては、積付け部Dにて物品Bが積み付けられたパレットPを収納部Sに収納しかつ収納部Sに収納したパレットPを物品搬出部Eに搬出すべくパレットPを搬送する搬送手段Fが、スタッカークレーンKと搬送台車Jとを主要部として構成されることになる。
【0037】
図2にも示すように、スタッカークレーンKは、走行台車5から立設した昇降マスト6に沿って昇降駆動される昇降台7に、収納部Sの外方に引退する引退状態と収納部S内に突出する突出状態とに出退駆動自在なフォーク8を、物品載置体として装備して、そのフォーク8の昇降作動及び出退作動により、パレットPを収納部Sに収納する降ろし処理及び収納部に収納したパレットPを取出す掬い処理を行うように構成されている。
【0038】
つまり、スタッカークレーンKは、入出庫コンベヤ2に入庫されたパレットPを収納部Sに収納する入庫作業や、収納部Sに収納されているパレットPを入出庫コンベヤ2に出庫する出庫作業を行うことになり、そして、入庫作業を行うときに、上記降ろし処理を行い、また、出庫作業を行うときに、上記掬い処理を行うことになる。
尚、スタッカークレーンKは、入庫作業において入出庫コンベヤ2からパレットPを取出すときにも、上記掬い処理と同様にフォーク8を作動させ、出庫作業において入出庫コンベヤ2にパレットPを降ろすときにも、上記降ろし処理と同様にフォーク8を作動させることになる。
【0039】
図1及び図2に示すように、保管棚1の収納部Sが、突出状態のフォーク8が上下に通過する間隔を隔てる状態で並置された左右一対の支持体10にて、パレットPの両端部を載置支持するように構成されている。
つまり、左右一対の保管棚1の夫々は、棚前後方向に間隔を隔てる前後一対の柱9、9からなる柱組を、棚横幅方向に沿って並設し、柱組の夫々に、腕木状の支持体10を棚横幅方向に向けて片持ち状に突出する状態で上下方向に並べて設けて、棚横幅方向に隣接して並ぶ柱の組の間に、収納部Sを上下方向に並ぶ状態で形成するように構成されている。
【0040】
ちなみに、柱組を構成する前後一対の柱9、9は、水平材やラチス材により、一体状態に予め組み付けられており、また、棚横幅方向に並ぶ柱の組は、保管棚1の背面部に相当する箇所に設置されている水平材やブレース材等により一体状態に組み付けられることになる。
【0041】
スタッカークレーンKに搭載する、若しくは、地上に設置したクレーン制御部KC(図5参照)が、上述の降ろし処理を行うときには、左右一対の支持体10よりも高い降ろし用基準高さにてフォーク8を突出状態に突出させ、次に、左右一対の支持体10よりも低い降ろし用目標高さにフォーク8を下降させ、その後、フォーク8を引退状態に引退させるべく、スタッカークレーンKの作動を制御し、また、上述の掬い処理を行うときには、降ろし用目標高さに相当する掬い用基準高さにてフォーク8を突出状態に突出させ、次に、降ろし用基準高さに相当する掬い用目標高さにフォーク8を上昇させ、その後、フォーク8を引退状態に引退させるべく、スタッカークレーンKの作動を制御するように構成されている。
【0042】
尚、クレーン制御部KCは、走行レール3を走行する走行台車5の走行位置を検出する走行位置検出センサや、昇降台7の昇降位置を検出する昇降位置検出センサ等の各種のセンサ類の検出情報に基づいて、スタッカークレーンKの作動を制御することになるが、本書においては、その詳細な説明は省略する。
【0043】
積付け部Dは、手押し台車等の搬入車11にて搬入される物品Bを、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて、パレットPに段積み状態に積み付けるように構成されるものであって、図3に示すように、搬送台車Jにて搬送されてくる空状態のパレットPを受け入れかつ物品Bが段積み状態に積み付けられたパレットPを搬送台車Jに送り出す一対の積付け作業用コンベヤ12、及び、搬入車11にて搬入される物品Bを積付け作業用コンベヤ12に載置されているパレットPに積み付けるパレタイズロボットMが備えられている。
【0044】
搬入される物品Bは、搬送用パレットQに段積み状態に積み付けられており、その搬送用パレットQには、ICタグ等を用いて構成されて、物品情報を記憶する物品情報記憶部13が装備され、その物品情報記憶部13には、物品Bの識別情報、物品Bの大きさ及び重量を示す物品仕様情報、並びに、搬送用パレットQに段積みされている物品数を示す物品数情報等の物品情報が記憶されている。
そして、積付け部Dには、物品情報記憶部13に記憶されている物品情報を読取るための可搬式の物品情報読取部14が装備されており、積付け部Dに位置する作業者が、物品情報読取部14を用いて、物品情報記憶部13に記憶された物品情報を読取ることにより、積付け管理用コントローラHD(図5参照)が、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて、物品BをパレットPに段積み状態に積み付けるようにすべく、パレタイズロボットMを作動させるように構成されている。
【0045】
つまり、積付け管理用コントローラHDは、搬入される複数種の物品Bの夫々について、物品Bを設定許容条件にて積み付ける積付けパターンを予め記憶しており、物品情報読取部14にて読取られた物品情報に基づいて、積付け対象となる物品Bの積付けパターンを定めて、パレタイズロボットMを作動させることになる。
尚、パレタイズロボットMを作動させるには、搬送用パレットQに載置されている物品Bの位置を検出するセンサ等の種々のセンサ類の情報も利用されるが、それらの具体構成は周知であるため、本書においてはその説明を省略する。
【0046】
上記積付けパターンは、積み付ける段ごとに物品Bを設定個数ずつ水平方向に並べた状態で、設定複数段に積み付けるパターンとして設定されるものであり、そして、最上段においては、設定個数よりも少ない数の物品Bが位置することを許容するパターンとして設定されている。
【0047】
尚、搬入された複数の物品Bを積み付けるにあたり、それらを一つのパレットPに積み付けることができないときには、複数のパレットPに分散して積み付けることになるが、本実施形態においては、積付け順位が先のパレットPに対して、設定許容条件を満たす最大数の物品Bを積付け、積付け順位が最後のパレットPには、設定許容条件を満たす最大数よりも少ない数の物品Bを積み付けるようにする。
【0048】
ちなみに、搬送用パレットQに段積みされた物品BをパレットPに積み替えて、そのパレットPを収納部Sに収納する理由としては、搬送用パレットQが、パレットPに較べて強度が弱く、収納部Sに収納するのに適さないことや、搬送用パレットQの大きさが、収納部Sに収納するのに適さないこと等を挙げることができる。
【0049】
一対の積付け作業用コンベヤ12には、搬送台車Jにて、順次空のパレットPが搬入されるようになっており、一対の積付け作業用コンベヤ12の一方に載置されているパレットPに対して物品Bの積み付けが終了すると、他方の積付け作業用コンベヤ12に載置されているパレットPに対して物品Bの積み付けを開始すべく、積付け管理用のコントローラHDがパレタイズロボットMの作動を制御するように構成されている。
【0050】
また、物品Bの積付けが終了したパレットPは、積付け作業用コンベヤ12から搬送台車Jに取り出されて、搬送台車Jにて保管棚1の入出庫コンベヤ2に搬送されることになり、そして、パレット処理部Gから取り出される空のパレットPが、搬送台車Jにて、パレットPが取り出された積付け作業用コンベヤ12に供給されるように構成されている。
【0051】
ちなみに、本実施形態においては、設定許容条件における設定上限高さが、例えば、1350mmで、設定上限重量が、500Kgである。
また、物品Bが、箱状であり、上述の如く、各段において水平方向に沿って設定個数の物品Bを縦横に並べる状態で、物品BがパレットPに段積み状態に積み付けられる。
【0052】
パレタイズロボットMは、図3に示すように、床面に立設される柱状の基枠15、その基枠15に対して、旋回及び昇降駆動自在に装備される屈伸アーム16、及び、その屈伸アーム16の先端に装備されて、物品Bを吸着保持する物品保持部17を備えて構成されるものであって、物品Bを物品保持部17にて一つずつ保持しながら、パレットPに積み付けるように構成されている。
【0053】
物品搬出部Eは、図1に示すように、パレットPから取り出した物品Bを搬出コンベヤ18にて外部に搬出するように構成されるものであって、保管棚1から出庫されて、搬送台車Jにて搬送されてくる物品積付け状態のパレットPを受け入れかつ物品Bが取り出された空状態のパレットPを搬送台車Jに送り出す一対の搬出作業用コンベヤ19、及び、パレットPに積み込まれた物品Bを搬出コンベヤ18に移載するデパレタイズロボットNが備えられている。
【0054】
一対の搬出作業用コンベヤ19には、搬送台車Jにて、順次物品積付け状態のパレットPが搬入されるようになっており、一対の搬出作業用コンベヤ19の一方に載置されているパレットPからの物品Bの取出しが終了すると、他方の搬出作業用コンベヤ19に載置されているパレットPからの物品Bの取出しを開始すべく、取出し管理用コントローラHE(図5参照)がデパレタイズロボットNの作動を制御するように構成されている。
【0055】
また、物品Bの取出しが終了した空のパレットPが、搬出作業用コンベヤ19から搬送台車Jに取り出されて、搬送台車Jにてパレット処理部Gに搬送され、かつ、保管棚1から出庫された物品積付け状態のパレットPが、搬送台車Jにて、空のパレットPが取り出された搬出作業用コンベヤ19に供給されるように構成されている。
【0056】
デパレタイズロボットNは、詳述はしないが、パレタイズロボットMと同様に構成されるものであって、パレットPに段積みされている物品Bを一つずつ保持しながら、搬出コンベヤ18に取り出すように構成されている。
【0057】
空のパレットPの段積み処理及び段ばらし処理を行うパレット処理部Gは、搬送台車Jから供給される空のパレットPを段積み状態にする段積み処理部Gdと、段積み状態の空のパレットPを保持して、空のパレットPを一つずつ搬送台車Jに供給する段ばらし処理部Gbとを備えるものである。
【0058】
パレット処理部Gにおける段積み処理部Gdには、物品搬出部Eにて空状態になったパレットPが順次供給されることになり、パレットPの段積み数が設定数段積み数に達すると、段積み状態のパレットPは、搬送台車Jにて保管棚1の入出庫コンベヤ2に供給されて、保管棚1に収納されるように構成されている(図2参照)。
ちなみに、パレットPの段積み数が設定数段積み数になった状態において、段積みされたパレットPの高さは、設定許容条件における設定上限高さとパレットPの厚みとを加えた高さよりも小さな高さとなることはもちろんである。
【0059】
パレット処理部Gにおける段ばらし処理部Gbには、保管棚1に収納された段積み状態のパレットPが順次供給され、そして、その段ばらし処理部から一枚ずつ取り出される空状態のパレットPが、搬送台車Jにて積付け部Dの搬出入コンベヤに搬送されるように構成されている。
【0060】
尚、物品Bの搬入作業と物品Bの搬出作業とは、通常、異なる時間帯において、集中的に行われるため、パレット処理部Gが装備されることになり、そして、パレット処理部Gの段積み処理部Gd及び段積ばらし処理部Gbの具体構成は、周知であるので、本書においてはその詳細な説明を省略する。
【0061】
搬送台車Jは、図1に示すように、チェーンコンベヤ等を用いて構成されるパレット搬送用コンベヤ20を上部に備える状態に構成されている。
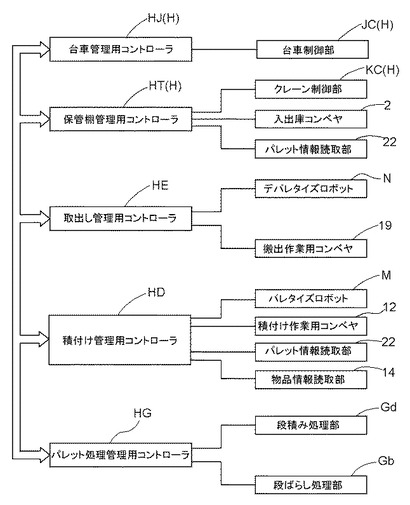
そして、搬送台車Jを、保管棚1における入出庫コンベヤ2に対するパレット搬送位置、積付け部Dにおける積付け作業用コンベヤ12に対するパレット搬送位置、物品搬出部Eにおける搬出作業用コンベヤ19に対するパレット搬送位置、並びに、パレット処理部Gにおける段積み処理部Gdに対するパレット搬送位置および段積ばらし処理部Gbに対するパレット搬送位置に走行させながら、パレットPの搬送を行うべく、台車管理用コントローラHJが、搬送台車Jに搭載した台車制御部JCに作業指令を指令し、台車制御部JCが、指令された作業指令に基づいて搬送台車Jの作動を制御するように構成されている(図6参照)。
【0062】
すなわち、図5に示すように、台車管理用コントローラHJ、保管棚管理用コントローラHT、積付け管理用コントローラHD、取出し管理用コントローラHE、及び、パレット処理部Gの運転を管理するパレット処理用コントローラHGが、通信自在に接続されており、台車管理用コントローラHJが、他のコントローラからの指令情報に基づいて、搬送台車Jを作動させることにより、パレットPの搬送が行われるように構成されている。
【0063】
積付け部Dに対するパレットPの搬送を例に挙げて説明を加えると、積付け管理用のコントローラHDは、空のパレットPに対する物品Bの積付けが完了すると、物品Bが段積み状態に積み付けられた物品積付け状態のパレットPの搬出を要求する搬出要求情報を出力することになり、台車管理用コントローラHJが、物品積付け状態のパレットPを保管棚1の入出庫コンベヤ2に搬送すべく、搬送台車Jの台車制御部JCに対して搬送指令を指令し、加えて、保管棚管理用コントローラが、物品積付け状態のパレットPを保管棚1に収納すべく、スタッカークレーンKのクレーン制御部KCに対して搬送指令を指令することになる。
【0064】
また、台車管理用コントローラが、パレット処理部Gの段ばらし処理部Gdから空状態のパレットPを受取って、積付け部DにおけるパレットPが搬出された積付け作業用コンベヤ12に空状態のパレットPを供給すべく、搬送台車Jの台車制御部JCに対して搬送指令を指令するように構成されている。
【0065】
ちなみに、本実施形態においては、積付け部Dにて物品Bが積み付けられたパレットPを収納部Sに収納しかつ収納部Sに収納したパレットPを物品搬出部Eに搬出すべくパレットPを搬送する搬送手段Fが、スタッカークレーンK及び搬送台車Jを主要部として構成されることになるが、その搬送手段Fの作動を制御する制御手段Hが、台車管理用コントローラHJ、保管棚管理用コントローラHT、搬送台車Jの台車制御部JC、及び、スタッカークレーンKのクレーン制御部KCを主要部として構成されることになる。
【0066】
本実施形態の基本的な構成は、上述の通りであり、以下、本実施形態の特徴的な構成について説明する。
本実施形態においては、パレットPとして、保管棚1の収納部Sに収納したときの下方側の撓み量が、設定許容条件における設定上限重量(例えば、500Kg)で物品Bを積付けると、許容限度(例えば、10mm)内となる難撓みパレットPnと、設定上限重量で物品Bを積みけると、許容限度(例えば、10mm)超える易撓みパレットPyとがある。
【0067】
そして、これら難撓みパレットPnと易撓みパレットPyとは、パレット処理部Gの段積み処理部Gdにて混合された状態で段積みされながら使用されることになる。
【0068】
パレットPには、各パレットPを識別する識別情報、使用開始日を示す開始日情報、難撓みパレットPnであるかあるいは易撓みパレットPyであるかを示すパレット種別情報等のパレット情報を記憶するパレット情報記憶部21が設けられ(図3参照)、そして、図1に示すように、積付け部Dの積付け作業用コンベヤ12に対応する箇所には、パレットPのパレット情報記憶部21に記憶されているパレット情報を読取るパレット情報読取部22が設けられている。
パレット情報記憶部21は、ICタグ等を用いて構成され、パレット情報読取部22が、タグリーダ等を用いて構成されている。
【0069】
ちなみに、保管棚1の入出庫コンベヤ2に対応する箇所には、パレットPのパレット情報記憶部21に記憶されているパレット情報を読取るパレット情報読取部22が設けられており、保管棚管理用コントローラHTが、入庫されるパレットPを識別しながら、保管棚1に収納するように構成されている。
【0070】
積付け管理用のコントローラHDは、パレット情報読取部22の読取情報に基づいて、物品Bを積み付けるパレットPが難撓みパレットPnであるか、易撓みパレットPyであるかを判断して、難撓みパレットPnである場合には、上述した設定許容条件、つまり、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて物品Bを積み付け、かつ、易撓みパレットPyである場合には、設定上限高さ以下でかつ設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品Bを積み付けるようにすべく、パレタイズロボットMを作動させるように構成されている。
【0071】
そして、易撓みパレット用上限重量が、易撓みパレットPyを収納部Sに収納したときの下方側への撓み量を、難撓みパレットPnにおける許容限度(例えば、10mm)内とする重量(例えば、300Kg)に定められている。
したがって、積付け部Dにて物品Bが積み付けられたパレットPを収納部Sに収納したときの下方側への撓み量は、難撓みパレットPn及び易撓みパレットPyのいずれにおいても、許容限度(例えば、10mm)内となる。
【0072】
このように、積付け部Dにて物品Bが積み付けられたパレットPを収納部Sに収納したときの下方側への撓み量が、難撓みパレットPn及び易撓みパレットPyのいずれにおいても許容限度(例えば、10mm)内となるため、保管棚1の上下方向に並ぶ収納部Sにおける上下に隣接する収納部Sの夫々が装備する支持体10の上下方向の間隔が、収納対象の収納部の下方の収納部に設定上限高さの物品Bを積んだパレットPが収納された状態において、収納対象の収納部に対して降ろし処理を行うために、フォーク8を、下方側への撓み量が許容限度内となるパレットPについての降ろし用目標高さに位置させたときには、フォーク8が下方の収納部Shに収納されている物品Bの上面から設定融通距離を離れる間隔に定められている。
【0073】
フォーク8を、降ろし処理のために降ろし用目標高さにて収納部S内に突出させた状態を例にして説明すると、図4に示すように、上下方向に並ぶ支持体10の隣接するもの同士の間隔L1は、下方の収納部Sに収納されたパレットPの厚みL5、そのパレットPに段積みされる物品Bの高さの最大高さに相当する設定上限高さL6、その物品Bの上面とフォーク8の下面との間隔である設定融通距離L3、フォーク8の厚みL4、及び、フォーク8の上面と収納対象の収納部Sの支持体10の上面との間の離間距離L2を加えた値になる。
尚、離間距離L2は、パレットPの下方側への撓み量と、掬い用基準高さのフォーク8と支持体10に載置したパレットPの下面との間の余裕間隔を加えた値である。
【0074】
したがって、収納部Sに収納したパレットPの下方側の撓み量が難撓みパレットPnの許容限度内(例えば、10mm内)とする状態で、上下方向に並ぶ支持体10の隣接するもの同士の間隔L1が定められるため、保管棚1の収納部Sを、隣接する柱組の間に、密に並ぶ状態で形成できるものとなり、パレットPを保管棚1に効率良く収納することができるものとなる。
【0075】
ちなみに、上述の離間距離L2は、フォーク8の掬い用基準高さや降ろし用目標高さに相当するものであって、例えば、30mmに設定されることになる。また、設定融通距離L3は、例えば、25mmに設定されることになる。
また、図4において、L7は、フォーク8が降ろし用基準高さや掬い用目標高さに位置する状態におけるパレットPの下面と支持体10の上面との間の離間距離を示すものであって、フォーク8の降ろし用基準高さや掬い用目標高さに相当することになり、例えば、60mmに設定されることになる。
【0076】
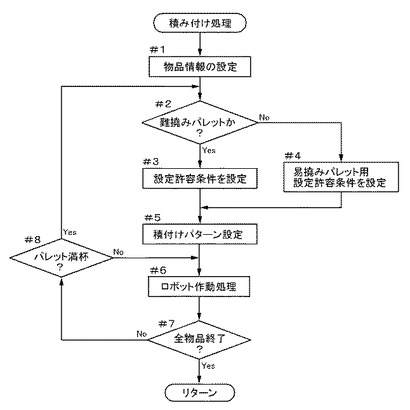
次に、積付け管理用コントローラHDが実行する積付け処理について、図6のフローチャートに基づいて説明する。
先ず、物品情報読取部14の読み取り情報に基づいて、次に積み付け作業を行う物品Bの情報(物品Bの種類、数量等)を設定する(#1)。
尚、物品情報読取部14による物品情報記憶部13に対する読み取り操作は、作業者によって行われるため、物品情報読取部14による物品情報記憶部13に対する読み取り操作が、予め行われた場合には、その内容を記憶しておいて、その記憶しておいた内容を読み出して、次に積み付け作業を行う物品Bの情報(物品Bの種類、数量等)を設定することになる。
【0077】
次に、一対の積付け作業用コンベヤ12のうちの、今回作業対象となる積付け作業用コンベヤ12に載置されている空状態のパレットPのパレット情報記憶部21の記憶情報を、パレット情報読取部22にて読み取り、その読取情報に基づいて、積付け対象のパレットPが難撓みパレットPnであるか否かを判別する(#2)。
そして、難撓みパレットPnである場合には、物品Bの積付け条件として、設定許容条件を設定し(#3)、また、難撓みパレットPnでない場合、つまり、易撓みパレットPyである場合には、物品Bの積付け条件として、易撓みパレット用設定許容条件を設定する(#4)。
【0078】
#3及び#4にて、物品Bの積付け条件を設定した後は、積付け対象のパレットPに物品Bを積み付けるための積付けパターンを設定する(#5)。
つまり、積付け管理用コントローラHDは、搬入される複数種の物品Bの夫々について、物品Bを設定許容条件や易撓みパレット用設定許容条件にて積み付ける積付けパターンを予め記憶しており、物品情報読取部14にて読取られた物品情報に基づいて、積付け対象となる物品Bの積付けパターンを選択して、積付けパターンを設定することになる。
【0079】
積付けパターンは、物品Bを各段において縦横に並べる際における、縦方向や横方向の個数を示情報や、段積みする最大数を示す情報、及び、物品Bの積み付手順を示す情報を含む形態で作成されている。
ちなみに、物品Bの積み付手順を示す情報とは、積付け対象のパレットPに物品Bを載置する位置とその順位を示す情報である。
【0080】
#6にて、積付けパターンを設定した後は、パレタイズロボットMを作動させて、物品Bを積付け対象のパレットPに順次積み付けるロボット作動処理を実行する(#6)。
本フローチャートにおいては、このロボット作動処理は、一つの物品Bを積付けパターンに沿って積み付ける処理である。
【0081】
#6のロボット作動処理を実行した後は、現在積付け対象としている物品Bの全ての積付けが終了したか否かを判別し(#7)、終了している場合には、#1の処理に移行することになる。
#7にて、全ての物品Bの積付けが終了していないと判別した場合には、現在積付け対象としてパレットPが満杯であるか、つまり、一つのパレットPに対する積付けパターンが終了しているか否かを判別し(#8)、パレットPが満杯でないと判別した場合には、#6のロボット作動処理を実行することになる。
【0082】
また、#8にて、パレットPが満杯であると判別した場合には、#2に移行して、次に作業対象となる積付け作業用コンベヤ12に載置されている空状態のパレットPのパレット情報記憶部21の記憶情報を、パレット情報読取部22にて読み取り、その読取情報に基づいて、積付け対象のパレットPが難撓みパレットPnであるか否かを判別し、その後、上述した処理を繰り返すことになる。
【0083】
尚、物品Bが積み付けられたパレットPは、上述の如く、搬送台車Jにて入出庫コンベヤ2に搬送されて、保管棚1に保管されることになり、そして、パレットPが搬出された積付け作業用コンベヤ12には、パレット処理部Gに保管されている空状態のパレットPが、搬送台車Jにて搬送されてくることは、上述した通りである。
【0084】
〔別実施形態〕
次に、別実施形態を列記する。
(1)上記実施形態では、積付け部が、パレタイズロボットを用いて、物品を積み付けるように構成される場合を例示したが、積付け部において、作業者が物品を積み付ける形態で実施してもよい。
この場合、作業者に対して、積付けパターンを示す情報を表示する表示手段を、積付け部に装備するとよい。
【0085】
(2)上記実施形態では、積付け部にて物品と積み付けたパレットが、搬送台車にて保管棚の入出庫コンベヤに搬送されて、保管棚に保管される場合を例示したが、積付け部が、入出庫コンベヤに載置されているパレットに対して物品を積み付けるようにする形態で実施してもよい。
この場合、積付け部にて物品が積み付けられたパレットを収納部に収納しかつ収納部に収納したパレットを物品搬出部Eに搬出すべくパレットを搬送する搬送手段が、スタッカークレーンにて構成されることになる。
【0086】
(3)上記実施形態では、易撓みパレット用設定許容条件における易撓みパレット用上限重量として、許容限度以下となる重量に定める場合、つまり、易撓みパレット用上限重量で物品を積み付ければ、易撓みパレットの下方側への撓み量が許容限度となる場合を例示したが、易撓みパレット用上限重量としては、易撓みパレット用上限重量で物品を積み付ければ、易撓みパレットの下方側への撓み量が許容限度よりも小さくなる重量に設定してもよい。
【0087】
(4)上記実施形態では、積付け部に、屈伸アームを装備したパレタイズロボットを備えさせる場合を例示したが、縦横に走行する走行台車を天井側に備えて、その走行台車に対して物品保持部を昇降自在に備えた物品移載ロボットを、積付け部に装備して、物品の積み付けを行わせるようにする等、積付け部に装備する物品積付け装置としては、種々の形態のものを使用できる。
【0088】
(5)上記実施形態では、棚横幅方向に並ぶ柱組に支持体を装備する形態で保管棚を構成する場合を例示したが、保管棚の構成は各種の構成を適用できるものであって、要は、収納部が、左右一対の支持体にて、パレットの両端部を載置支持するように構成されていればよい。
【符号の説明】
【0089】
1 保管棚
8 物品載置体
9 柱
10 支持体
B 物品
D 積付け部
F 搬送手段
H 制御手段
L1 間隔
L3 設定融通距離
P パレット
S 収納部
【技術分野】
【0001】
本発明は、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて、物品をパレットに段積み状態に積み付ける積付け部と、前記パレットを載置支持する複数の収納部が並設された保管棚と、前記積付け部にて物品が積み付けられた前記パレットを前記収納部に収納し、かつ、前記収納部に収納した前記パレットを搬出すべく前記パレットを搬送する搬送手段と、前記搬送手段の作動を制御する制御手段とが設けられ、
前記搬送手段が、前記収納部の外方に引退する引退状態と前記収納部内に突出する突出状態とに出退駆動自在で且つ昇降駆動自在な物品載置体にて、前記パレットを前記収納部に収納する降ろし処理及び前記収納部に収納した前記パレットを取り出す掬い処理を行うように構成され、
前記収納部が、前記突出状態の前記物品載置体が上下に通過する間隔を隔てる状態で並置された左右一対の支持体にて、前記パレットの両端部を載置支持するように構成され、
前記制御手段が、前記降ろし処理を行うときには、前記左右一対の支持体よりも高い降ろし用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記左右一対の支持体よりも低い降ろし用目標高さに前記物品載置体を下降させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御し、かつ、前記掬い処理を行うときには、前記降ろし用目標高さに相当する掬い用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記降ろし用基準高さに相当する掬い用目標高さに前記物品載置体を上昇させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御するように構成されている物品保管設備、及び、その物品保管設備における物品積付け方法に関する。
【背景技術】
【0002】
パレットを載置支持する複数の収納部が並設された保管棚を備える物品保管設備に物品を保管する場合には、積付け部にてパレットに物品を積み付けて、物品が積み付けられたパレットを、スタッカークレーン等の搬送手段にて搬送して、収納部に収納することになる(例えば、特許文献1参照。)。
ちなみに、特許文献1においては、物品としてのコンテナをパレットに積み付けることが例示されている。
【0003】
スタッカークレーン等の搬送手段は、収納部の外方に引退する引退状態と収納部内に突出する突出状態とに出退駆動自在で且つ昇降駆動自在な物品載置体を備えて、パレットを収納部に収納する降ろし処理及び収納部に収納したパレットを取り出す掬い処理を行うように構成され、また、収納部が、突出状態の物品載置体が上下に通過する間隔を隔てる状態で並置された左右一対の支持体にて、パレットの両端部を載置支持するように構成されることになる。
【0004】
そして、搬送手段の作動を制御する制御手段が、降ろし処理を行うときには、左右一対の支持体よりも高い降ろし用基準高さにて物品載置体を突出状態に突出させ、次に、左右一対の支持体よりも低い降ろし用目標高さに物品載置体を下降させ、その後、物品載置体を引退状態に引退させるべく、搬送手段の作動を制御し、かつ、掬い処理を行うときには、降ろし用目標高さに相当する掬い用基準高さにて物品載置体を突出状態に突出させ、次に、降ろし用基準高さに相当する掬い用目標高さに物品載置体を上昇させ、その後、物品載置体を引退状態に引退させるべく、搬送手段の作動を制御するように構成されている(例えば、特許文献2参照。)。
【0005】
上記特許文献1及び特許文献2には記載されていないが、パレットに物品を積み付ける際には、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて、物品をパレットに段積み状態に積み付けることが行われることになる。
つまり、保管棚の耐荷重やパレットの耐荷重等に基づいて、パレットに物品を積み付ける際の設定上限重量が定められることになる。
また、降ろし処理や掬い処理を行う際に、降ろし用目標高さ及び掬い用基準高さの物品載置体が、下方の収納部に収納されている物品の上面から設定融通距離(例えば、15mm)以上離れる状態となるように、パレットに物品を積み付ける際の設定上限高さが定められることになる。
【0006】
説明を加えると、一般には、特許文献2において図示されているように、保管棚の棚前後方向に並ぶ一対の柱からなる柱組が、保管棚の棚横幅方向に並べて床面部に立設され、且つ、柱組の夫々に、支持体が棚横幅方向に向けて片持ち状に突出する状態で上下方向に並べて設けられて、棚横幅方向に隣接して並ぶ柱組の間に、収納部が上下方向に並ぶ状態に形成される形態で、保管棚が構成されることになる。
【0007】
そして、上下方向に並ぶ支持体の隣接するもの同士の間隔が、物品が設定上限高さとなるように積み付けられたパレットが収納されている収納部の上方の収納部に対して、降ろし処理や掬い処理を行う際に、降ろし用目標高さ及び掬い用基準高さの物品載置体が下方の収納部に収納されている物品の上面から設定融通距離(例えば、25mm)以上離れる状態となるように定められて、降ろし用目標高さ及び掬い用基準高さに対する物品載置体の停止位置が多少ずれることや、物品載置体が上下に振動するようなことがあっても、物品載置体が物品に接当する等のトラブルの発生を回避するようになっている。
【0008】
また、パレットは、収納部に収納されたときには、左右の支持体にて左右両端部が載置支持されるため、左右の支持体の間に位置する部分が、積み付けられた物品の重量にて下方側に撓むことになり、そして、その下方側の撓み量は、設定上限重量以下で物品を積み付けたときには、許容限度内(例えば、10mm内)となるように構成される。
そして、降ろし用目標高さ及び掬い用基準高さの物品載置体と支持体に載置したパレットの下面との間には、20mm程度の余裕間隔を隔てる必要があるため、降ろし用目標高さ及び掬い用基準高さが、パレットの下方側の撓み量を考慮して定められることになり、結果的に、上下方向に並ぶ支持体の隣接するもの同士の間隔は、パレットの下方側の撓み量をも考慮して定められることになる。
【0009】
例えば、物品載置体を降ろし処理のために降ろし用目標高さにて収納部内に突出させた状態を例にして説明すると、図4に示すように、上下方向に並ぶ支持体の隣接するもの同士の間隔L1は、下方の収納部に収納されたパレットの厚みL5、そのパレットに段積みされる物品の高さの最大高さに相当する設定上限高さL6、その物品の上面と物品載置体の下面との間隔である設定融通距離L3、物品載置体の厚みL4、及び、物品載置体の上面と収納対象の収納部の支持体の上面との間の離間距離L2を加えた値になる。そして、離間距離L2は、パレットの下方側への撓み量と、降ろし用目標高さ及び掬い用基準高さの物品載置体と支持体に載置したパレットの下面との間の余裕間隔を加えた値となる。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平5−262407号公報
【特許文献2】特開2000−229706号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
物品保管設備に使用するパレットは、上述の如く、設定許容条件における設定上限重量以下となるように物品を積み付ければ、その下方側の撓み量が許容限度内となるものであるが、パレットとして、設定許容条件における設定上限重量で物品を積み付けても、その下方側の撓み量が許容限度を超えるパレットを使用することが望まれる場合がある。
【0012】
例えば、物品保管設備を設置する際に、その設置箇所に、以前から使用されているパレットが存在する場合があり、このような場合には、物品保管設備を設置するためのイニシャルコストの低下を図るべく、以前から使用されているパレットを保管棚にて保管するパレットとして使用することになるが、この以前から使用されているパレットが、設定許容条件における設定上限重量で物品を積み付けても、その下方側の撓み量が許容限度を超える場合がある。
【0013】
したがって、物品保管設備に使用されるパレットとしては、設定許容条件における設定上限重量以下となるように物品を積み付ければ、その下方側の撓み量が許容限度内となるパレット(以下、難撓みパレットと略称する)と、設定許容条件における設定上限重量で物品を積み付けても、その下方側の撓み量が許容限度を超えるパレット(以下、易撓みパレットと略称する)とが存在することになる。
【0014】
そして、易撓みパレットにも、単に、設定許容条件における設定上限重量以下となるように物品を積み付ければ、その下方側の撓み量が、例えば30mmになる等、許容限度(例えば、10mm)を超える場合が存在することになる。
このような場合には、降ろし処理における降ろし用目標高さ、及び、掬い処理における掬い用基準高さを、易撓みパレットの下方側への撓み量の最大値に基づいて定めて、それに合わせて、上下方向に並ぶ支持体の隣接するもの同士の間隔を定めた形態で保管棚を構成することが考えられる。
【0015】
ちなみに、易撓みパレットの下方側への撓み量が最大となるのは、設定許容条件における設定上限重量にて易撓みパレットにて物品を積み込んだときであり、そして、降ろし用目標高さ及び掬い用基準高さを、易撓みパレットの下方側への撓み量の最大値に基づいて定めるとは、下方側への撓み量が最大となる易撓みパレットを収納部の支持体にて支持した状態において、そのパレットの下面から余裕間隔(例えば、15mm)だけ下方に位置する高さに、降ろし用目標高さ及び掬い用基準高さを定めることを意味するものである。
【0016】
しかしながら、降ろし用目標高さ及び掬い用基準高さを易撓みパレットの下方側への撓み量の最大値に基づいて定め、それに合わせて、上下方向に並ぶ支持体の隣接するもの同士の間隔を定めた形態で保管棚を構成すると、上下方向に並ぶ支持体の隣接するもの同士の間隔が、難撓みパレットの撓み量に鑑みて保管棚を構成する場合に較べて、大きくなるため、保管棚の収納効率が低下する不都合があった。
【0017】
本発明は、上記実状に鑑みて為されたものであって、その目的は、パレットとして、設定上限重量で物品を積み付けて収納部に収納した際の下方側の撓み量が、許容限度内となるパレットと、許容限度を超えるパレットとを使用しながらも、保管棚の収納効率の低下を抑制することができる物品保管設備を提供する点にある。
【課題を解決するための手段】
【0018】
本発明の物品保管設備は、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて、物品をパレットに段積み状態に積み付ける積付け部と、前記パレットを載置支持する複数の収納部が並設された保管棚と、前記積付け部にて物品が積み付けられた前記パレットを前記収納部に収納し、かつ、前記収納部に収納した前記パレットを搬出すべく前記パレットを搬送する搬送手段と、前記搬送手段の作動を制御する制御手段とが設けられ、
前記搬送手段が、前記収納部の外方に引退する引退状態と前記収納部内に突出する突出状態とに出退駆動自在で且つ昇降駆動自在な物品載置体にて、前記パレットを前記収納部に収納する降ろし処理及び前記収納部に収納した前記パレットを取り出す掬い処理を行うように構成され、
前記収納部が、前記突出状態の前記物品載置体が上下に通過する間隔を隔てる状態で並置された左右一対の支持体にて、前記パレットの両端部を載置支持するように構成され、
前記制御手段が、前記降ろし処理を行うときには、前記左右一対の支持体よりも高い降ろし用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記左右一対の支持体よりも低い降ろし用目標高さに前記物品載置体を下降させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御し、かつ、前記掬い処理を行うときには、前記降ろし用目標高さに相当する掬い用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記降ろし用基準高さに相当する掬い用目標高さに前記物品載置体を上昇させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御するように構成されているものであって、その第1特徴構成は、
前記パレットとして、前記収納部に収納したときの下方側への撓み量が、前記設定上限重量で物品を積付けると、許容限度内となる難撓みパレットと、前記設定上限重量で物品を積付けると、前記許容限度を超える易撓みパレットとがあり、
前記積付け部が、前記難撓みパレットに物品を積み付けるときには、前記設定許容条件にて物品を積付け、かつ、前記易撓みパレットに物品を積み付けるときには、前記設定上限高さ以下でかつ前記設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品を積み付けるように構成されている点を特徴とする。
【0019】
すなわち、パレットとして、収納部に収納したときの下方側への撓み量が、設定上限重量で物品を積付けると、許容限度内となる難撓みパレットと、設定上限重量で物品を積付けると、許容限度を超える易撓みパレットとが存在する。
【0020】
そして、積付け部が、難撓みパレットに物品を積み付けるときには、設定許容条件にて物品を積付け、かつ、易撓みパレットに物品を積み付けるときには、設定上限高さ以下でかつ設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品を積み付けることになる。
【0021】
このように、易撓みパレットに物品を積み付けるときには、積付け部が易撓みパレット用設定条件にて物品を積み付けるものであるから、易撓みパレット用設定条件における易撓みパレット用上限重量として、その易撓みパレット用上限重量にて物品を易撓みパレットに積み付けたときに、易撓みパレットの下方側への撓み量が上述した許容限度内となる重量に設定しておくことにより、易撓みパレットの撓み量を、上述した許容限度内に収めることができる。
【0022】
したがって、難撓みパレット及び易撓みパレットのいずれにおいても、収納部に収納したときの下方側の撓み量が、上述した許容限度内となるから、保管棚に備えさせる収納部を、下方側への撓み量が許容限度内となるパレットを収納するのに適する形態で形成できるため、保管棚に備えさせる収納部を、上述した許容限度を超えるパレットを収納するのに適する形態で形成するのに較べて、保管棚の収納効率の低下を抑制できるものとなる。
【0023】
要するに、本発明の第1特徴構成によれば、パレットとして、設定上限重量で物品を積み付けて収納部に収納した際の下方側の撓み量が、許容限度内となるパレットと、許容限度を超えるパレットとを使用しながらも、保管棚の収納効率の低下を抑制することができる物品保管設備を提供できる。
【0024】
本発明の物品保管設備の第2特徴構成は、上記第1特徴構成に加えて、
前記保管棚が、棚前後方向に並ぶ一対の柱からなる柱組を、前記保管棚の棚横幅方向に並べて床面部に立設し、且つ、前記柱組の夫々に、前記支持体を前記棚横幅方向に向けて片持ち状に突出する状態で上下方向に並べて設けて、前記収納部を棚横幅方向に隣接して並ぶ前記柱組の間に上下方向に並ぶ状態に形成する状態に構成され、
前記上下方向に並ぶ前記収納部における上下に隣接する前記収納部の夫々が装備する前記支持体の上下方向の間隔が、収納対象の収納部の下方の収納部に前記設定上限高さの物品を積んだ前記パレットが収納された状態において、収納対象の収納部に対して前記降ろし処理を行うために、前記物品載置体を前記下方側への撓み量が前記許容限度内となる前記パレットについての前記降ろし用目標高さに位置させたときには、前記物品載置体が下方の収納部に収納されている物品の上面から設定融通距離を離れる間隔に定められている点を特徴とする。
【0025】
すなわち、保管棚が、棚横幅方向に隣接して並ぶ柱組の間に、収納部が上下方向に並ぶ状態に形成される形態で構成されることになる。
そして、上下方向に並ぶ収納部における上下に隣接する収納部の夫々が装備する支持体の上下方向の間隔が、収納対象の収納部の下方の収納部に設定上限高さの物品を積んだパレットが収納された状態において、収納対象の収納部に対して降ろし処理を行うために、物品載置体を下方側への撓み量が許容限度内となるパレットについての降ろし用目標高さに位置させたときには、物品載置体が下方の収納部に収納されている物品の上面から設定融通距離を離れる間隔に定められている。
【0026】
つまり、難撓みパレット及び易撓みパレットのいずれにおいても、収納部に収納したときの下方側の撓み量が、上述した許容限度内となる点に鑑みて、上下方向に並ぶ収納部における上下に隣接する収納部の夫々が装備する支持体の上下方向の間隔を、収納対象の下方の収納部に設定上限高さの物品を積んだパレットが収納された状態において、収納対象の収納部に対して降ろし処理及び掬い処理を行うために、物品載置体を下方側への撓み量が許容限度内となるパレットについての降ろし用目標高さ及び掬い用基準高さに位置させたときには、物品載置体が下方の収納部に収納されている物品の上面から設定融通距離を離れる間隔に定めるものであるから、降ろし処理及び掬い処理を行うために、降ろし用目標高さ及び掬い用基準高さに位置させた物品載置体が、下方の収納部に収納した物品に接当する等のトラブルを回避しながらも、棚横幅方向に隣接して並ぶ柱組の間に上下方向に並ぶ状態で形成される収納部を、極力密な状態で備えさせることができるのであり、パレットとして、難撓みパレット及び易撓みパレットを用いながらも、保管棚の収納効率の低下を的確に抑制できる。
【0027】
要するに、本発明の第2特徴構成によれば、上記第1特徴構成による作用効果に加えて、棚横幅方向に隣接して並ぶ柱組の間に上下方向に並ぶ状態に収納部を形成する形態で保管棚を構成する場合において、保管棚の収納効率の低下を的確に抑制できる物品保管設備を提供できる。
【0028】
本発明の物品保管設備における物品積付け方法は、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて、物品をパレットに段積み状態に積み付ける積付け部と、前記パレットを載置支持する複数の収納部が並設された保管棚と、前記積付け部にて物品が積み付けられた前記パレットを前記収納部に収納し、かつ、前記収納部に収納した前記パレットを搬出すべく前記パレットを搬送する搬送手段と、前記搬送手段の作動を制御する制御手段とが設けられ、
前記搬送手段が、前記収納部の外方に引退する引退状態と前記収納部内に突出する突出状態とに出退駆動自在で且つ昇降駆動自在な物品載置体にて、前記パレットを前記収納部に収納する降ろし処理及び前記収納部に収納した前記パレットを取り出す掬い処理を行うように構成され、
前記収納部が、前記突出状態の前記物品載置体が上下に通過する間隔を隔てる状態で並置された左右一対の支持体にて、前記パレットの両端部を載置支持するように構成され、
前記制御手段が、前記降ろし処理を行うときには、前記左右一対の支持体よりも高い降ろし用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記左右一対の支持体よりも低い降ろし用目標高さに前記物品載置体を下降させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御し、かつ、前記掬い処理を行うときには、前記降ろし用目標高さに相当する掬い用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記降ろし用基準高さに相当する掬い用目標高さに前記物品載置体を上昇させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御するように構成されている物品保管設備における物品積付け方法であって、
前記パレットとして、前記収納部に収納したときの下方側への撓み量が、前記設定上限重量で物品を積付けると、許容限度内となる難撓みパレットと、前記設定上限重量で物品を積付けると、前記許容限度を超える易撓みパレットとがあり、
前記積付け部において、前記難撓みパレットに物品を積み付けるときには、前記設定許容条件にて物品を積付け、かつ、前記易撓みパレットに物品を積み付けるときには、前記設定上限高さ以下でかつ前記設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品をパレットに段積み状態に積み付けるようにする点を特徴とする。
【0029】
すなわち、パレットとして、収納部に収納したときの下方側への撓み量が、設定上限重量で物品を積付けると、許容限度内となる難撓みパレットと、設定上限重量で物品を積付けると、許容限度を超える易撓みパレットとが存在する。
【0030】
そして、積付け部において、難撓みパレットに物品を積み付けるときには、設定許容条件にて物品を積付け、かつ、易撓みパレットに物品を積み付けるときには、設定上限高さ以下でかつ設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品を積み付けることになる。
【0031】
このように、易撓みパレットに物品を積み付けるときには、積付け部が易撓みパレット用設定条件にて物品を積み付けるものであるから、易撓みパレット用設定条件における易撓みパレット用上限重量として、その易撓みパレット用上限重量にて物品を易撓みパレットに積み付けたときに、易撓みパレットの下方側への撓み量が上述した許容限度内となる重量に設定しておくことにより、易撓みパレットの撓み量を、上述した許容限度内に収めることができる。
【0032】
したがって、難撓みパレット及び易撓みパレットのいずれにおいても、収納部に収納したときの下方側の撓み量が、上述した許容限度内となるから、保管棚に備えさせる収納部を、下方側への撓み量が許容限度内となるパレットを収納するのに適する形態で形成できるため、保管棚に備えさせる収納部を、上述した許容限度を超えるパレットを収納するのに適する形態で形成するのに較べて、保管棚の収納効率の低下を抑制できるものとなる。
【0033】
要するに、本発明の物品保管設備における物品積付け方法によれば、パレットとして、設定許容条件における設定上限重量で物品を積み付けて収納部に収納した際の下方側の撓み量が、許容限度内となるパレットと、許容限度を超えるパレットとを使用しながらも、保管棚の収納効率の低下を抑制することができる物品保管設備における物品積付け方法を提供できる。
【図面の簡単な説明】
【0034】
【図1】物品保管設備の概略平面図
【図2】保管棚の側面図
【図3】積付け部の概略斜視図
【図4】収納部に収納されたパレットとフォークとの関係を示す概略正面図
【図5】制御構成を示すブロック図
【図6】積付け部の制御作動を示すフローチャート
【発明を実施するための形態】
【0035】
次に、本発明の実施形態を図面に基づいて説明する。
図1に示すように、外部から搬入される物品BをパレットPに段積み状態に積み付ける積付け部D、物品Bが積み付けられたパレットPを載置支持する複数の収納部Sが並設された保管棚1、パレットPから物品Bを取り出して外部に搬出する物品搬出部E、積付け部Dにて物品Bが積み付けられたパレットPを収納部Sに収納しかつ収納部Sに収納したパレットPを物品搬出部Eに搬出すべくパレットPを搬送する搬送手段F、及び、空のパレットPの段積み処理及び段ばらし処理を行うパレット処理部Gが装備されて、搬入された物品BをパレットPに段積みした状態で収納部Sに収納し、パレットPに段積みされた物品BをパレットPから取り出して外部に搬出する物品保管設備が構成されている。
【0036】
保管棚1が、物品出し入れ方向を互いに対向させた状態で、間隔を隔てて左右一対設置され、それら左右一対の保管棚1の横側脇に、左右一対の入出庫コンベヤ2が設置されている。
左右一対の保管棚1の間の床面に設置された走行レール3にて案内されて、保管棚1の横幅方向に沿って移動自在なスタッカークレーンKが設けられ、また、積付け部D、入出庫コンベヤ2、物品搬出部E及びパレット処理部Gを経由する走行ライン4に沿って走行自在な搬送台車Jが設けられている。
ちなみに、本実施形態においては、積付け部Dにて物品Bが積み付けられたパレットPを収納部Sに収納しかつ収納部Sに収納したパレットPを物品搬出部Eに搬出すべくパレットPを搬送する搬送手段Fが、スタッカークレーンKと搬送台車Jとを主要部として構成されることになる。
【0037】
図2にも示すように、スタッカークレーンKは、走行台車5から立設した昇降マスト6に沿って昇降駆動される昇降台7に、収納部Sの外方に引退する引退状態と収納部S内に突出する突出状態とに出退駆動自在なフォーク8を、物品載置体として装備して、そのフォーク8の昇降作動及び出退作動により、パレットPを収納部Sに収納する降ろし処理及び収納部に収納したパレットPを取出す掬い処理を行うように構成されている。
【0038】
つまり、スタッカークレーンKは、入出庫コンベヤ2に入庫されたパレットPを収納部Sに収納する入庫作業や、収納部Sに収納されているパレットPを入出庫コンベヤ2に出庫する出庫作業を行うことになり、そして、入庫作業を行うときに、上記降ろし処理を行い、また、出庫作業を行うときに、上記掬い処理を行うことになる。
尚、スタッカークレーンKは、入庫作業において入出庫コンベヤ2からパレットPを取出すときにも、上記掬い処理と同様にフォーク8を作動させ、出庫作業において入出庫コンベヤ2にパレットPを降ろすときにも、上記降ろし処理と同様にフォーク8を作動させることになる。
【0039】
図1及び図2に示すように、保管棚1の収納部Sが、突出状態のフォーク8が上下に通過する間隔を隔てる状態で並置された左右一対の支持体10にて、パレットPの両端部を載置支持するように構成されている。
つまり、左右一対の保管棚1の夫々は、棚前後方向に間隔を隔てる前後一対の柱9、9からなる柱組を、棚横幅方向に沿って並設し、柱組の夫々に、腕木状の支持体10を棚横幅方向に向けて片持ち状に突出する状態で上下方向に並べて設けて、棚横幅方向に隣接して並ぶ柱の組の間に、収納部Sを上下方向に並ぶ状態で形成するように構成されている。
【0040】
ちなみに、柱組を構成する前後一対の柱9、9は、水平材やラチス材により、一体状態に予め組み付けられており、また、棚横幅方向に並ぶ柱の組は、保管棚1の背面部に相当する箇所に設置されている水平材やブレース材等により一体状態に組み付けられることになる。
【0041】
スタッカークレーンKに搭載する、若しくは、地上に設置したクレーン制御部KC(図5参照)が、上述の降ろし処理を行うときには、左右一対の支持体10よりも高い降ろし用基準高さにてフォーク8を突出状態に突出させ、次に、左右一対の支持体10よりも低い降ろし用目標高さにフォーク8を下降させ、その後、フォーク8を引退状態に引退させるべく、スタッカークレーンKの作動を制御し、また、上述の掬い処理を行うときには、降ろし用目標高さに相当する掬い用基準高さにてフォーク8を突出状態に突出させ、次に、降ろし用基準高さに相当する掬い用目標高さにフォーク8を上昇させ、その後、フォーク8を引退状態に引退させるべく、スタッカークレーンKの作動を制御するように構成されている。
【0042】
尚、クレーン制御部KCは、走行レール3を走行する走行台車5の走行位置を検出する走行位置検出センサや、昇降台7の昇降位置を検出する昇降位置検出センサ等の各種のセンサ類の検出情報に基づいて、スタッカークレーンKの作動を制御することになるが、本書においては、その詳細な説明は省略する。
【0043】
積付け部Dは、手押し台車等の搬入車11にて搬入される物品Bを、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて、パレットPに段積み状態に積み付けるように構成されるものであって、図3に示すように、搬送台車Jにて搬送されてくる空状態のパレットPを受け入れかつ物品Bが段積み状態に積み付けられたパレットPを搬送台車Jに送り出す一対の積付け作業用コンベヤ12、及び、搬入車11にて搬入される物品Bを積付け作業用コンベヤ12に載置されているパレットPに積み付けるパレタイズロボットMが備えられている。
【0044】
搬入される物品Bは、搬送用パレットQに段積み状態に積み付けられており、その搬送用パレットQには、ICタグ等を用いて構成されて、物品情報を記憶する物品情報記憶部13が装備され、その物品情報記憶部13には、物品Bの識別情報、物品Bの大きさ及び重量を示す物品仕様情報、並びに、搬送用パレットQに段積みされている物品数を示す物品数情報等の物品情報が記憶されている。
そして、積付け部Dには、物品情報記憶部13に記憶されている物品情報を読取るための可搬式の物品情報読取部14が装備されており、積付け部Dに位置する作業者が、物品情報読取部14を用いて、物品情報記憶部13に記憶された物品情報を読取ることにより、積付け管理用コントローラHD(図5参照)が、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて、物品BをパレットPに段積み状態に積み付けるようにすべく、パレタイズロボットMを作動させるように構成されている。
【0045】
つまり、積付け管理用コントローラHDは、搬入される複数種の物品Bの夫々について、物品Bを設定許容条件にて積み付ける積付けパターンを予め記憶しており、物品情報読取部14にて読取られた物品情報に基づいて、積付け対象となる物品Bの積付けパターンを定めて、パレタイズロボットMを作動させることになる。
尚、パレタイズロボットMを作動させるには、搬送用パレットQに載置されている物品Bの位置を検出するセンサ等の種々のセンサ類の情報も利用されるが、それらの具体構成は周知であるため、本書においてはその説明を省略する。
【0046】
上記積付けパターンは、積み付ける段ごとに物品Bを設定個数ずつ水平方向に並べた状態で、設定複数段に積み付けるパターンとして設定されるものであり、そして、最上段においては、設定個数よりも少ない数の物品Bが位置することを許容するパターンとして設定されている。
【0047】
尚、搬入された複数の物品Bを積み付けるにあたり、それらを一つのパレットPに積み付けることができないときには、複数のパレットPに分散して積み付けることになるが、本実施形態においては、積付け順位が先のパレットPに対して、設定許容条件を満たす最大数の物品Bを積付け、積付け順位が最後のパレットPには、設定許容条件を満たす最大数よりも少ない数の物品Bを積み付けるようにする。
【0048】
ちなみに、搬送用パレットQに段積みされた物品BをパレットPに積み替えて、そのパレットPを収納部Sに収納する理由としては、搬送用パレットQが、パレットPに較べて強度が弱く、収納部Sに収納するのに適さないことや、搬送用パレットQの大きさが、収納部Sに収納するのに適さないこと等を挙げることができる。
【0049】
一対の積付け作業用コンベヤ12には、搬送台車Jにて、順次空のパレットPが搬入されるようになっており、一対の積付け作業用コンベヤ12の一方に載置されているパレットPに対して物品Bの積み付けが終了すると、他方の積付け作業用コンベヤ12に載置されているパレットPに対して物品Bの積み付けを開始すべく、積付け管理用のコントローラHDがパレタイズロボットMの作動を制御するように構成されている。
【0050】
また、物品Bの積付けが終了したパレットPは、積付け作業用コンベヤ12から搬送台車Jに取り出されて、搬送台車Jにて保管棚1の入出庫コンベヤ2に搬送されることになり、そして、パレット処理部Gから取り出される空のパレットPが、搬送台車Jにて、パレットPが取り出された積付け作業用コンベヤ12に供給されるように構成されている。
【0051】
ちなみに、本実施形態においては、設定許容条件における設定上限高さが、例えば、1350mmで、設定上限重量が、500Kgである。
また、物品Bが、箱状であり、上述の如く、各段において水平方向に沿って設定個数の物品Bを縦横に並べる状態で、物品BがパレットPに段積み状態に積み付けられる。
【0052】
パレタイズロボットMは、図3に示すように、床面に立設される柱状の基枠15、その基枠15に対して、旋回及び昇降駆動自在に装備される屈伸アーム16、及び、その屈伸アーム16の先端に装備されて、物品Bを吸着保持する物品保持部17を備えて構成されるものであって、物品Bを物品保持部17にて一つずつ保持しながら、パレットPに積み付けるように構成されている。
【0053】
物品搬出部Eは、図1に示すように、パレットPから取り出した物品Bを搬出コンベヤ18にて外部に搬出するように構成されるものであって、保管棚1から出庫されて、搬送台車Jにて搬送されてくる物品積付け状態のパレットPを受け入れかつ物品Bが取り出された空状態のパレットPを搬送台車Jに送り出す一対の搬出作業用コンベヤ19、及び、パレットPに積み込まれた物品Bを搬出コンベヤ18に移載するデパレタイズロボットNが備えられている。
【0054】
一対の搬出作業用コンベヤ19には、搬送台車Jにて、順次物品積付け状態のパレットPが搬入されるようになっており、一対の搬出作業用コンベヤ19の一方に載置されているパレットPからの物品Bの取出しが終了すると、他方の搬出作業用コンベヤ19に載置されているパレットPからの物品Bの取出しを開始すべく、取出し管理用コントローラHE(図5参照)がデパレタイズロボットNの作動を制御するように構成されている。
【0055】
また、物品Bの取出しが終了した空のパレットPが、搬出作業用コンベヤ19から搬送台車Jに取り出されて、搬送台車Jにてパレット処理部Gに搬送され、かつ、保管棚1から出庫された物品積付け状態のパレットPが、搬送台車Jにて、空のパレットPが取り出された搬出作業用コンベヤ19に供給されるように構成されている。
【0056】
デパレタイズロボットNは、詳述はしないが、パレタイズロボットMと同様に構成されるものであって、パレットPに段積みされている物品Bを一つずつ保持しながら、搬出コンベヤ18に取り出すように構成されている。
【0057】
空のパレットPの段積み処理及び段ばらし処理を行うパレット処理部Gは、搬送台車Jから供給される空のパレットPを段積み状態にする段積み処理部Gdと、段積み状態の空のパレットPを保持して、空のパレットPを一つずつ搬送台車Jに供給する段ばらし処理部Gbとを備えるものである。
【0058】
パレット処理部Gにおける段積み処理部Gdには、物品搬出部Eにて空状態になったパレットPが順次供給されることになり、パレットPの段積み数が設定数段積み数に達すると、段積み状態のパレットPは、搬送台車Jにて保管棚1の入出庫コンベヤ2に供給されて、保管棚1に収納されるように構成されている(図2参照)。
ちなみに、パレットPの段積み数が設定数段積み数になった状態において、段積みされたパレットPの高さは、設定許容条件における設定上限高さとパレットPの厚みとを加えた高さよりも小さな高さとなることはもちろんである。
【0059】
パレット処理部Gにおける段ばらし処理部Gbには、保管棚1に収納された段積み状態のパレットPが順次供給され、そして、その段ばらし処理部から一枚ずつ取り出される空状態のパレットPが、搬送台車Jにて積付け部Dの搬出入コンベヤに搬送されるように構成されている。
【0060】
尚、物品Bの搬入作業と物品Bの搬出作業とは、通常、異なる時間帯において、集中的に行われるため、パレット処理部Gが装備されることになり、そして、パレット処理部Gの段積み処理部Gd及び段積ばらし処理部Gbの具体構成は、周知であるので、本書においてはその詳細な説明を省略する。
【0061】
搬送台車Jは、図1に示すように、チェーンコンベヤ等を用いて構成されるパレット搬送用コンベヤ20を上部に備える状態に構成されている。
そして、搬送台車Jを、保管棚1における入出庫コンベヤ2に対するパレット搬送位置、積付け部Dにおける積付け作業用コンベヤ12に対するパレット搬送位置、物品搬出部Eにおける搬出作業用コンベヤ19に対するパレット搬送位置、並びに、パレット処理部Gにおける段積み処理部Gdに対するパレット搬送位置および段積ばらし処理部Gbに対するパレット搬送位置に走行させながら、パレットPの搬送を行うべく、台車管理用コントローラHJが、搬送台車Jに搭載した台車制御部JCに作業指令を指令し、台車制御部JCが、指令された作業指令に基づいて搬送台車Jの作動を制御するように構成されている(図6参照)。
【0062】
すなわち、図5に示すように、台車管理用コントローラHJ、保管棚管理用コントローラHT、積付け管理用コントローラHD、取出し管理用コントローラHE、及び、パレット処理部Gの運転を管理するパレット処理用コントローラHGが、通信自在に接続されており、台車管理用コントローラHJが、他のコントローラからの指令情報に基づいて、搬送台車Jを作動させることにより、パレットPの搬送が行われるように構成されている。
【0063】
積付け部Dに対するパレットPの搬送を例に挙げて説明を加えると、積付け管理用のコントローラHDは、空のパレットPに対する物品Bの積付けが完了すると、物品Bが段積み状態に積み付けられた物品積付け状態のパレットPの搬出を要求する搬出要求情報を出力することになり、台車管理用コントローラHJが、物品積付け状態のパレットPを保管棚1の入出庫コンベヤ2に搬送すべく、搬送台車Jの台車制御部JCに対して搬送指令を指令し、加えて、保管棚管理用コントローラが、物品積付け状態のパレットPを保管棚1に収納すべく、スタッカークレーンKのクレーン制御部KCに対して搬送指令を指令することになる。
【0064】
また、台車管理用コントローラが、パレット処理部Gの段ばらし処理部Gdから空状態のパレットPを受取って、積付け部DにおけるパレットPが搬出された積付け作業用コンベヤ12に空状態のパレットPを供給すべく、搬送台車Jの台車制御部JCに対して搬送指令を指令するように構成されている。
【0065】
ちなみに、本実施形態においては、積付け部Dにて物品Bが積み付けられたパレットPを収納部Sに収納しかつ収納部Sに収納したパレットPを物品搬出部Eに搬出すべくパレットPを搬送する搬送手段Fが、スタッカークレーンK及び搬送台車Jを主要部として構成されることになるが、その搬送手段Fの作動を制御する制御手段Hが、台車管理用コントローラHJ、保管棚管理用コントローラHT、搬送台車Jの台車制御部JC、及び、スタッカークレーンKのクレーン制御部KCを主要部として構成されることになる。
【0066】
本実施形態の基本的な構成は、上述の通りであり、以下、本実施形態の特徴的な構成について説明する。
本実施形態においては、パレットPとして、保管棚1の収納部Sに収納したときの下方側の撓み量が、設定許容条件における設定上限重量(例えば、500Kg)で物品Bを積付けると、許容限度(例えば、10mm)内となる難撓みパレットPnと、設定上限重量で物品Bを積みけると、許容限度(例えば、10mm)超える易撓みパレットPyとがある。
【0067】
そして、これら難撓みパレットPnと易撓みパレットPyとは、パレット処理部Gの段積み処理部Gdにて混合された状態で段積みされながら使用されることになる。
【0068】
パレットPには、各パレットPを識別する識別情報、使用開始日を示す開始日情報、難撓みパレットPnであるかあるいは易撓みパレットPyであるかを示すパレット種別情報等のパレット情報を記憶するパレット情報記憶部21が設けられ(図3参照)、そして、図1に示すように、積付け部Dの積付け作業用コンベヤ12に対応する箇所には、パレットPのパレット情報記憶部21に記憶されているパレット情報を読取るパレット情報読取部22が設けられている。
パレット情報記憶部21は、ICタグ等を用いて構成され、パレット情報読取部22が、タグリーダ等を用いて構成されている。
【0069】
ちなみに、保管棚1の入出庫コンベヤ2に対応する箇所には、パレットPのパレット情報記憶部21に記憶されているパレット情報を読取るパレット情報読取部22が設けられており、保管棚管理用コントローラHTが、入庫されるパレットPを識別しながら、保管棚1に収納するように構成されている。
【0070】
積付け管理用のコントローラHDは、パレット情報読取部22の読取情報に基づいて、物品Bを積み付けるパレットPが難撓みパレットPnであるか、易撓みパレットPyであるかを判断して、難撓みパレットPnである場合には、上述した設定許容条件、つまり、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて物品Bを積み付け、かつ、易撓みパレットPyである場合には、設定上限高さ以下でかつ設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品Bを積み付けるようにすべく、パレタイズロボットMを作動させるように構成されている。
【0071】
そして、易撓みパレット用上限重量が、易撓みパレットPyを収納部Sに収納したときの下方側への撓み量を、難撓みパレットPnにおける許容限度(例えば、10mm)内とする重量(例えば、300Kg)に定められている。
したがって、積付け部Dにて物品Bが積み付けられたパレットPを収納部Sに収納したときの下方側への撓み量は、難撓みパレットPn及び易撓みパレットPyのいずれにおいても、許容限度(例えば、10mm)内となる。
【0072】
このように、積付け部Dにて物品Bが積み付けられたパレットPを収納部Sに収納したときの下方側への撓み量が、難撓みパレットPn及び易撓みパレットPyのいずれにおいても許容限度(例えば、10mm)内となるため、保管棚1の上下方向に並ぶ収納部Sにおける上下に隣接する収納部Sの夫々が装備する支持体10の上下方向の間隔が、収納対象の収納部の下方の収納部に設定上限高さの物品Bを積んだパレットPが収納された状態において、収納対象の収納部に対して降ろし処理を行うために、フォーク8を、下方側への撓み量が許容限度内となるパレットPについての降ろし用目標高さに位置させたときには、フォーク8が下方の収納部Shに収納されている物品Bの上面から設定融通距離を離れる間隔に定められている。
【0073】
フォーク8を、降ろし処理のために降ろし用目標高さにて収納部S内に突出させた状態を例にして説明すると、図4に示すように、上下方向に並ぶ支持体10の隣接するもの同士の間隔L1は、下方の収納部Sに収納されたパレットPの厚みL5、そのパレットPに段積みされる物品Bの高さの最大高さに相当する設定上限高さL6、その物品Bの上面とフォーク8の下面との間隔である設定融通距離L3、フォーク8の厚みL4、及び、フォーク8の上面と収納対象の収納部Sの支持体10の上面との間の離間距離L2を加えた値になる。
尚、離間距離L2は、パレットPの下方側への撓み量と、掬い用基準高さのフォーク8と支持体10に載置したパレットPの下面との間の余裕間隔を加えた値である。
【0074】
したがって、収納部Sに収納したパレットPの下方側の撓み量が難撓みパレットPnの許容限度内(例えば、10mm内)とする状態で、上下方向に並ぶ支持体10の隣接するもの同士の間隔L1が定められるため、保管棚1の収納部Sを、隣接する柱組の間に、密に並ぶ状態で形成できるものとなり、パレットPを保管棚1に効率良く収納することができるものとなる。
【0075】
ちなみに、上述の離間距離L2は、フォーク8の掬い用基準高さや降ろし用目標高さに相当するものであって、例えば、30mmに設定されることになる。また、設定融通距離L3は、例えば、25mmに設定されることになる。
また、図4において、L7は、フォーク8が降ろし用基準高さや掬い用目標高さに位置する状態におけるパレットPの下面と支持体10の上面との間の離間距離を示すものであって、フォーク8の降ろし用基準高さや掬い用目標高さに相当することになり、例えば、60mmに設定されることになる。
【0076】
次に、積付け管理用コントローラHDが実行する積付け処理について、図6のフローチャートに基づいて説明する。
先ず、物品情報読取部14の読み取り情報に基づいて、次に積み付け作業を行う物品Bの情報(物品Bの種類、数量等)を設定する(#1)。
尚、物品情報読取部14による物品情報記憶部13に対する読み取り操作は、作業者によって行われるため、物品情報読取部14による物品情報記憶部13に対する読み取り操作が、予め行われた場合には、その内容を記憶しておいて、その記憶しておいた内容を読み出して、次に積み付け作業を行う物品Bの情報(物品Bの種類、数量等)を設定することになる。
【0077】
次に、一対の積付け作業用コンベヤ12のうちの、今回作業対象となる積付け作業用コンベヤ12に載置されている空状態のパレットPのパレット情報記憶部21の記憶情報を、パレット情報読取部22にて読み取り、その読取情報に基づいて、積付け対象のパレットPが難撓みパレットPnであるか否かを判別する(#2)。
そして、難撓みパレットPnである場合には、物品Bの積付け条件として、設定許容条件を設定し(#3)、また、難撓みパレットPnでない場合、つまり、易撓みパレットPyである場合には、物品Bの積付け条件として、易撓みパレット用設定許容条件を設定する(#4)。
【0078】
#3及び#4にて、物品Bの積付け条件を設定した後は、積付け対象のパレットPに物品Bを積み付けるための積付けパターンを設定する(#5)。
つまり、積付け管理用コントローラHDは、搬入される複数種の物品Bの夫々について、物品Bを設定許容条件や易撓みパレット用設定許容条件にて積み付ける積付けパターンを予め記憶しており、物品情報読取部14にて読取られた物品情報に基づいて、積付け対象となる物品Bの積付けパターンを選択して、積付けパターンを設定することになる。
【0079】
積付けパターンは、物品Bを各段において縦横に並べる際における、縦方向や横方向の個数を示情報や、段積みする最大数を示す情報、及び、物品Bの積み付手順を示す情報を含む形態で作成されている。
ちなみに、物品Bの積み付手順を示す情報とは、積付け対象のパレットPに物品Bを載置する位置とその順位を示す情報である。
【0080】
#6にて、積付けパターンを設定した後は、パレタイズロボットMを作動させて、物品Bを積付け対象のパレットPに順次積み付けるロボット作動処理を実行する(#6)。
本フローチャートにおいては、このロボット作動処理は、一つの物品Bを積付けパターンに沿って積み付ける処理である。
【0081】
#6のロボット作動処理を実行した後は、現在積付け対象としている物品Bの全ての積付けが終了したか否かを判別し(#7)、終了している場合には、#1の処理に移行することになる。
#7にて、全ての物品Bの積付けが終了していないと判別した場合には、現在積付け対象としてパレットPが満杯であるか、つまり、一つのパレットPに対する積付けパターンが終了しているか否かを判別し(#8)、パレットPが満杯でないと判別した場合には、#6のロボット作動処理を実行することになる。
【0082】
また、#8にて、パレットPが満杯であると判別した場合には、#2に移行して、次に作業対象となる積付け作業用コンベヤ12に載置されている空状態のパレットPのパレット情報記憶部21の記憶情報を、パレット情報読取部22にて読み取り、その読取情報に基づいて、積付け対象のパレットPが難撓みパレットPnであるか否かを判別し、その後、上述した処理を繰り返すことになる。
【0083】
尚、物品Bが積み付けられたパレットPは、上述の如く、搬送台車Jにて入出庫コンベヤ2に搬送されて、保管棚1に保管されることになり、そして、パレットPが搬出された積付け作業用コンベヤ12には、パレット処理部Gに保管されている空状態のパレットPが、搬送台車Jにて搬送されてくることは、上述した通りである。
【0084】
〔別実施形態〕
次に、別実施形態を列記する。
(1)上記実施形態では、積付け部が、パレタイズロボットを用いて、物品を積み付けるように構成される場合を例示したが、積付け部において、作業者が物品を積み付ける形態で実施してもよい。
この場合、作業者に対して、積付けパターンを示す情報を表示する表示手段を、積付け部に装備するとよい。
【0085】
(2)上記実施形態では、積付け部にて物品と積み付けたパレットが、搬送台車にて保管棚の入出庫コンベヤに搬送されて、保管棚に保管される場合を例示したが、積付け部が、入出庫コンベヤに載置されているパレットに対して物品を積み付けるようにする形態で実施してもよい。
この場合、積付け部にて物品が積み付けられたパレットを収納部に収納しかつ収納部に収納したパレットを物品搬出部Eに搬出すべくパレットを搬送する搬送手段が、スタッカークレーンにて構成されることになる。
【0086】
(3)上記実施形態では、易撓みパレット用設定許容条件における易撓みパレット用上限重量として、許容限度以下となる重量に定める場合、つまり、易撓みパレット用上限重量で物品を積み付ければ、易撓みパレットの下方側への撓み量が許容限度となる場合を例示したが、易撓みパレット用上限重量としては、易撓みパレット用上限重量で物品を積み付ければ、易撓みパレットの下方側への撓み量が許容限度よりも小さくなる重量に設定してもよい。
【0087】
(4)上記実施形態では、積付け部に、屈伸アームを装備したパレタイズロボットを備えさせる場合を例示したが、縦横に走行する走行台車を天井側に備えて、その走行台車に対して物品保持部を昇降自在に備えた物品移載ロボットを、積付け部に装備して、物品の積み付けを行わせるようにする等、積付け部に装備する物品積付け装置としては、種々の形態のものを使用できる。
【0088】
(5)上記実施形態では、棚横幅方向に並ぶ柱組に支持体を装備する形態で保管棚を構成する場合を例示したが、保管棚の構成は各種の構成を適用できるものであって、要は、収納部が、左右一対の支持体にて、パレットの両端部を載置支持するように構成されていればよい。
【符号の説明】
【0089】
1 保管棚
8 物品載置体
9 柱
10 支持体
B 物品
D 積付け部
F 搬送手段
H 制御手段
L1 間隔
L3 設定融通距離
P パレット
S 収納部
【特許請求の範囲】
【請求項1】
設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて、物品をパレットに段積み状態に積み付ける積付け部と、前記パレットを載置支持する複数の収納部が並設された保管棚と、前記積付け部にて物品が積み付けられた前記パレットを前記収納部に収納し、かつ、前記収納部に収納した前記パレットを搬出すべく前記パレットを搬送する搬送手段と、前記搬送手段の作動を制御する制御手段とが設けられ、
前記搬送手段が、前記収納部の外方に引退する引退状態と前記収納部内に突出する突出状態とに出退駆動自在で且つ昇降駆動自在な物品載置体にて、前記パレットを前記収納部に収納する降ろし処理及び前記収納部に収納した前記パレットを取り出す掬い処理を行うように構成され、
前記収納部が、前記突出状態の前記物品載置体が上下に通過する間隔を隔てる状態で並置された左右一対の支持体にて、前記パレットの両端部を載置支持するように構成され、
前記制御手段が、前記降ろし処理を行うときには、前記左右一対の支持体よりも高い降ろし用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記左右一対の支持体よりも低い降ろし用目標高さに前記物品載置体を下降させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御し、かつ、前記掬い処理を行うときには、前記降ろし用目標高さに相当する掬い用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記降ろし用基準高さに相当する掬い用目標高さに前記物品載置体を上昇させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御するように構成されている物品保管設備であって、
前記パレットとして、前記収納部に収納したときの下方側への撓み量が、前記設定上限重量で物品を積付けると、許容限度内となる難撓みパレットと、前記設定上限重量で物品を積付けると、前記許容限度を超える易撓みパレットとがあり、
前記積付け部が、前記難撓みパレットに物品を積み付けるときには、前記設定許容条件にて物品を積付け、かつ、前記易撓みパレットに物品を積み付けるときには、前記設定上限高さ以下でかつ前記設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品を積み付けるように構成されている物品保管設備。
【請求項2】
前記保管棚が、棚前後方向に並ぶ一対の柱からなる柱組を、前記保管棚の棚横幅方向に並べて床面部に立設し、且つ、前記柱組の夫々に、前記支持体を前記棚横幅方向に向けて片持ち状に突出する状態で上下方向に並べて設けて、前記収納部を棚横幅方向に隣接して並ぶ前記柱組の間に上下方向に並ぶ状態に形成する状態に構成され、
前記上下方向に並ぶ前記収納部における上下に隣接する前記収納部の夫々が装備する前記支持体の上下方向の間隔が、収納対象の収納部の下方の収納部に前記設定上限高さの物品を積んだ前記パレットが収納された状態において、収納対象の収納部に対して前記降ろし処理を行うために、前記物品載置体を前記下方側への撓み量が前記許容限度内となる前記パレットについての前記降ろし用目標高さに位置させたときには、前記物品載置体が下方の収納部に収納されている物品の上面から設定融通距離を離れる間隔に定められている請求項1記載の物品保管設備。
【請求項3】
設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて、物品をパレットに段積み状態に積み付ける積付け部と、前記パレットを載置支持する複数の収納部が並設された保管棚と、前記積付け部にて物品が積み付けられた前記パレットを前記収納部に収納し、かつ、前記収納部に収納した前記パレットを搬出すべく前記パレットを搬送する搬送手段と、前記搬送手段の作動を制御する制御手段とが設けられ、
前記搬送手段が、前記収納部の外方に引退する引退状態と前記収納部内に突出する突出状態とに出退駆動自在で且つ昇降駆動自在な物品載置体にて、前記パレットを前記収納部に収納する降ろし処理及び前記収納部に収納した前記パレットを取り出す掬い処理を行うように構成され、
前記収納部が、前記突出状態の前記物品載置体が上下に通過する間隔を隔てる状態で並置された左右一対の支持体にて、前記パレットの両端部を載置支持するように構成され、
前記制御手段が、前記降ろし処理を行うときには、前記左右一対の支持体よりも高い降ろし用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記左右一対の支持体よりも低い降ろし用目標高さに前記物品載置体を下降させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御し、かつ、前記掬い処理を行うときには、前記降ろし用目標高さに相当する掬い用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記降ろし用基準高さに相当する掬い用目標高さに前記物品載置体を上昇させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御するように構成されている物品保管設備における物品積付け方法であって、
前記パレットとして、前記収納部に収納したときの下方側への撓み量が、前記設定上限重量で物品を積付けると、許容限度内となる難撓みパレットと、前記設定上限重量で物品を積付けると、前記許容限度を超える易撓みパレットとがあり、
前記積付け部において、前記難撓みパレットに物品を積み付けるときには、前記設定許容条件にて物品を積付け、かつ、前記易撓みパレットに物品を積み付けるときには、前記設定上限高さ以下でかつ前記設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品をパレットに段積み状態に積み付けるようにする物品保管設備における物品積付け方法。
【請求項1】
設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて、物品をパレットに段積み状態に積み付ける積付け部と、前記パレットを載置支持する複数の収納部が並設された保管棚と、前記積付け部にて物品が積み付けられた前記パレットを前記収納部に収納し、かつ、前記収納部に収納した前記パレットを搬出すべく前記パレットを搬送する搬送手段と、前記搬送手段の作動を制御する制御手段とが設けられ、
前記搬送手段が、前記収納部の外方に引退する引退状態と前記収納部内に突出する突出状態とに出退駆動自在で且つ昇降駆動自在な物品載置体にて、前記パレットを前記収納部に収納する降ろし処理及び前記収納部に収納した前記パレットを取り出す掬い処理を行うように構成され、
前記収納部が、前記突出状態の前記物品載置体が上下に通過する間隔を隔てる状態で並置された左右一対の支持体にて、前記パレットの両端部を載置支持するように構成され、
前記制御手段が、前記降ろし処理を行うときには、前記左右一対の支持体よりも高い降ろし用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記左右一対の支持体よりも低い降ろし用目標高さに前記物品載置体を下降させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御し、かつ、前記掬い処理を行うときには、前記降ろし用目標高さに相当する掬い用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記降ろし用基準高さに相当する掬い用目標高さに前記物品載置体を上昇させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御するように構成されている物品保管設備であって、
前記パレットとして、前記収納部に収納したときの下方側への撓み量が、前記設定上限重量で物品を積付けると、許容限度内となる難撓みパレットと、前記設定上限重量で物品を積付けると、前記許容限度を超える易撓みパレットとがあり、
前記積付け部が、前記難撓みパレットに物品を積み付けるときには、前記設定許容条件にて物品を積付け、かつ、前記易撓みパレットに物品を積み付けるときには、前記設定上限高さ以下でかつ前記設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品を積み付けるように構成されている物品保管設備。
【請求項2】
前記保管棚が、棚前後方向に並ぶ一対の柱からなる柱組を、前記保管棚の棚横幅方向に並べて床面部に立設し、且つ、前記柱組の夫々に、前記支持体を前記棚横幅方向に向けて片持ち状に突出する状態で上下方向に並べて設けて、前記収納部を棚横幅方向に隣接して並ぶ前記柱組の間に上下方向に並ぶ状態に形成する状態に構成され、
前記上下方向に並ぶ前記収納部における上下に隣接する前記収納部の夫々が装備する前記支持体の上下方向の間隔が、収納対象の収納部の下方の収納部に前記設定上限高さの物品を積んだ前記パレットが収納された状態において、収納対象の収納部に対して前記降ろし処理を行うために、前記物品載置体を前記下方側への撓み量が前記許容限度内となる前記パレットについての前記降ろし用目標高さに位置させたときには、前記物品載置体が下方の収納部に収納されている物品の上面から設定融通距離を離れる間隔に定められている請求項1記載の物品保管設備。
【請求項3】
設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて、物品をパレットに段積み状態に積み付ける積付け部と、前記パレットを載置支持する複数の収納部が並設された保管棚と、前記積付け部にて物品が積み付けられた前記パレットを前記収納部に収納し、かつ、前記収納部に収納した前記パレットを搬出すべく前記パレットを搬送する搬送手段と、前記搬送手段の作動を制御する制御手段とが設けられ、
前記搬送手段が、前記収納部の外方に引退する引退状態と前記収納部内に突出する突出状態とに出退駆動自在で且つ昇降駆動自在な物品載置体にて、前記パレットを前記収納部に収納する降ろし処理及び前記収納部に収納した前記パレットを取り出す掬い処理を行うように構成され、
前記収納部が、前記突出状態の前記物品載置体が上下に通過する間隔を隔てる状態で並置された左右一対の支持体にて、前記パレットの両端部を載置支持するように構成され、
前記制御手段が、前記降ろし処理を行うときには、前記左右一対の支持体よりも高い降ろし用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記左右一対の支持体よりも低い降ろし用目標高さに前記物品載置体を下降させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御し、かつ、前記掬い処理を行うときには、前記降ろし用目標高さに相当する掬い用基準高さにて前記物品載置体を前記突出状態に突出させ、次に、前記降ろし用基準高さに相当する掬い用目標高さに前記物品載置体を上昇させ、その後、前記物品載置体を前記引退状態に引退させるべく、前記搬送手段の作動を制御するように構成されている物品保管設備における物品積付け方法であって、
前記パレットとして、前記収納部に収納したときの下方側への撓み量が、前記設定上限重量で物品を積付けると、許容限度内となる難撓みパレットと、前記設定上限重量で物品を積付けると、前記許容限度を超える易撓みパレットとがあり、
前記積付け部において、前記難撓みパレットに物品を積み付けるときには、前記設定許容条件にて物品を積付け、かつ、前記易撓みパレットに物品を積み付けるときには、前記設定上限高さ以下でかつ前記設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品をパレットに段積み状態に積み付けるようにする物品保管設備における物品積付け方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−60260(P2013−60260A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−199821(P2011−199821)
【出願日】平成23年9月13日(2011.9.13)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月13日(2011.9.13)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
[ Back to top ]