
物品処理装置
【解決手段】 直列に配置された分割コンベヤ3A〜3C毎にそれぞれロボット4A〜4Cが設けられている。各ロボットは各分割コンベヤに供給された物品を、例えば10本を一まとめとしてバケットコンベヤ5の1つのバケット5a内に受け渡すことができるようになっている。各分割コンベヤは、搬送コンベヤ2から多くの物品が供給されている状態ではそれぞれ連続して運転されているが、各分割コンベヤへの物品の供給がなくなると停止されるようになっている。各分割コンベヤは、物品が新たに供給される都度間欠的に運転され、それによって各分割コンベヤ上に所定数の物品を貯溜させるようになる。各割コンベヤ上に所定数の物品が貯溜されたら、該物品は一まとめとしてバケット内に受け渡される。
【効果】 各割コンベヤ上に所定数の物品を貯溜することができるので、各ロボットによる所定本数ずつの処理を効率的に行える。
【効果】 各割コンベヤ上に所定数の物品を貯溜することができるので、各ロボットによる所定本数ずつの処理を効率的に行える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は物品処理装置に関し、より詳しくは、少なくとも2台のロボットを用いて搬送コンベヤ上から他の位置に物品を受け渡す物品処理装置に関する。
【背景技術】
【0002】
従来、物品処理装置として、搬送コンベヤの搬送方向に沿って2台のロボットを設け、各ロボットにより保持した物品を他の位置へ受け渡すようにしたものが知られている(特許文献1)。
より具体的には、上記物品処理装置は、物品を搬送する搬送コンベヤと、この搬送コンベヤの搬送方向に沿って設けた2台の第1ロボットと第2ロボットと、各ロボットのそれぞれの上流側に配置されて上記搬送コンベヤ上の物品を撮影する2台の第1カメラと第2カメラ、各カメラが撮影した物品の映像に基づいて上記各ロボットの作動をそれぞれ制御する第1ロボット制御手段と第2ロボット制御手段とを備え、それぞれのロボットによって搬送コンベヤ上の物品を保持するとともに、保持した物品を他の位置へ受け渡すようにしている。
そして上記物品処理装置では、上記各カメラが撮影した物品の映像をもとに、上流側の第1ロボットが上記搬送コンベヤによって搬送されてきた物品の一部を保持し、下流側の第2ロボットが上流側の第1ロボットによって保持されずに通過されてきた物品を保持するようになっている。
このような構成によれば、処理すべき物品が多くても、上記2台のロボットによって効率的に処理することが可能となる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3077563号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで従来、搬送コンベヤ上を搬送されてきた物品を所定数にまとめて他の位置へ受け渡すことが要求されることがある。例えば物品としてピロー包装されたスティック型のアイスクリームを10本まとめて他の位置であるバケットコンベヤの1つのバケット内に受け渡すことがある。この場合、バケットコンベヤは包装機械の一部を構成しており、バケットコンベヤの1つのバケット内に収容された10本のアイスクリームは、上記包装機械によって1つの箱内に包装されるようになる。
このような場合には、10本のアイスクリームを上記バケットコンベヤの1つのバケット内にまとめて受け渡す必要があり、それ未満の本数のアイスクリームを1つのバケット内に供給した場合には、不適正な包装となってしまう。
【0005】
しかるに、上述した従来の物品処理装置では、例えば15本のアイスクリームが搬送コンベヤによって供給されてきた場合には、上流側の第1ロボットは10本のアイスクリームを上記バケットコンベヤの第1バケット内に受け渡すことができる。
他方、下流側の第2ロボットには残りの5本のアイスクリームが供給されるだけなので、上述した不適正な包装を防止するためには、当該5本のアイスクリームを第2バケット内に受け渡すことはできない。このような場合には、当該5本のアイスクリームを第2ロボットの前を通過させて下流側の回収箱などで回収しており、非効率的であった。
【0006】
また従来、上記10本のアイスクリームを1つのバケット内にまとめて受け渡す場合に、該10本のアイスクリームを2回に分けて5本ずつ、1つの同一のバケット内に2段に積み重ねて受け渡すことも行われている。
この場合においては、上述した15本のアイスクリームが搬送コンベヤによって供給されてきた場合には、下流側の第2ロボットに残りの5本のアイスクリームが供給されるので、該第2ロボットは当該5本のアイスクリームを保持して1つのバケット内に供給することになる。
そして第2ロボットに引き続き新たに5本のアイスクリームが供給されてくれば、該第2ロボットはその新たに供給されてきた5本のアイスクリームを保持して、既に上記バケット内に供給した5本のアイスクリーム上に新たな5本のアイスクリームを積み重ねることができるようになる。
【0007】
しかしながらアイスクリームの供給量が少なくなると、該アイスクリームは上流側の第1ロボットによって優先的に保持されてしまうので、第2ロボットへの供給が滞りがちになり、第2ロボットに新たに5本のアイスクリームが供給されるのに時間がかかるようになる。
その場合には、第2ロボットに新たに5本のアイスクリームが供給された際には、既に5本のアイスクリームが供給されたバケットが第2ロボットによるアイスクリームの受け渡し領域を出てしまっている危険性があり、この場合にも上記包装機械による包装が不適正となる。
本発明はそのような事情に鑑み、搬送コンベヤ上を搬送されてきた物品を所定数にまとめて他の位置へ受け渡すことが要求される場合であっても、それら物品を上記第1ロボットと第2ロボットとで効率的に処理することができる物品処理装置を提供するものである。
【課題を解決するための手段】
【0008】
すなわち本発明は、物品を搬送する搬送コンベヤと、この搬送コンベヤの搬送方向に沿って設けた2台の第1ロボットと第2ロボットと、各ロボットのそれぞれの上流側に配置されて上記搬送コンベヤ上の物品を撮影する2台の第1カメラと第2カメラ、各カメラが撮影した物品の映像に基づいて上記各ロボットの作動をそれぞれ制御する第1ロボット制御手段と第2ロボット制御手段とを備え、それぞれのロボットによって搬送コンベヤ上の物品を保持するとともに、保持した物品を他の位置へ受け渡すようにした物品処理装置において、
上記各ロボットは、各ロボット制御手段によって所定数の複数の物品をまとめて他の位置へ受け渡すように制御されるようになっており、また上記第2ロボットに対して、上記搬送コンベヤを分割して該搬送コンベヤとは独立して運転制御される第2分割コンベヤを設けるとともに、該第2分割コンベヤを制御する第2分割コンベヤ制御手段を設け、
上記第2分割コンベヤ制御手段は、上記第2分割コンベヤ上に物品が供給されたことが検出されたら当該第2分割コンベヤを駆動させる一方、物品が供給されない場合には第2分割コンベヤを停止させることにより、該第2分割コンベヤ上に物品を貯溜させるように該第2分割コンベヤを運転制御し、
さらに上記第2ロボット制御手段は、上記第2分割コンベヤ上に上記所定数以上の物品が供給されたら第2ロボットを制御して上記所定数の物品を該第2分割コンベヤ上から他の位置へ受け渡すことを特徴とするものである。
【発明の効果】
【0009】
上記構成によれば、前述した例の場合に基づいて説明すれば、仮に15本のアイスクリームが搬送コンベヤによって供給されてきた場合には、上流側の第1ロボットは10本のアイスクリームを上記バケットコンベヤの第1バケット内に受け渡すことができる。
他方、下流側の第2ロボットには残りの5本のアイスクリームが供給されるだけなので、上述した不適正な包装を防止するためには、当該5本のアイスクリームを第2バケット内に受け渡すことはできない。しかるにこの場合には、上記第2分割コンベヤ制御手段は、上述した5本のアイスクリームを第2分割コンベヤ上に受け入れるが、その後のアイスクリームの供給がないので、該第2分割コンベヤの運転を停止させることになる。
【0010】
そして、追加の新たなアイスクリームが第2分割コンベヤ上に供給されると、上記分割コンベヤ制御手段によって第2分割コンベヤが駆動されて該第2分割コンベヤ上に上記追加のアイスクリームが受け入れられるようになり、その後のアイスクリームの供給がない場合には、再び第2分割コンベヤが停止されるようになる。
このような作動を繰り返して、上記第2分割コンベヤ上に10本以上のアイスクリームが供給されたら、上記第2ロボット制御手段は第2ロボットを制御して、10本のアイスクリームを上記バケットコンベヤのバケット内に受け渡すようになる。
このように本発明によれば、物品を所定数にまとめて他の位置へ受け渡すことが要求される場合であっても、上記ロボットにより従来に比較して効率的な処理を行うことができる。また、例えば上記10本のアイスクリームを5本ずつ2回の受け渡し動作によって2段済みにするような場合においても、円滑に処理することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施例を示す平面図。
【図2】図1のIII−III線に沿う断面図。
【図3】図2の要部の左側面図。
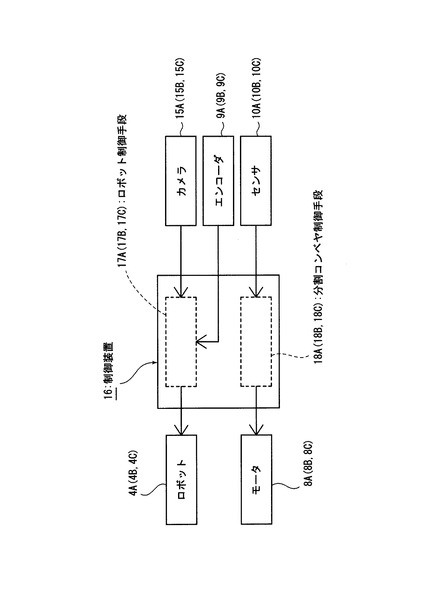
【図4】制御装置16を示す回路図。
【発明を実施するための形態】
【0012】
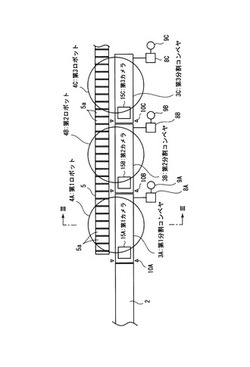
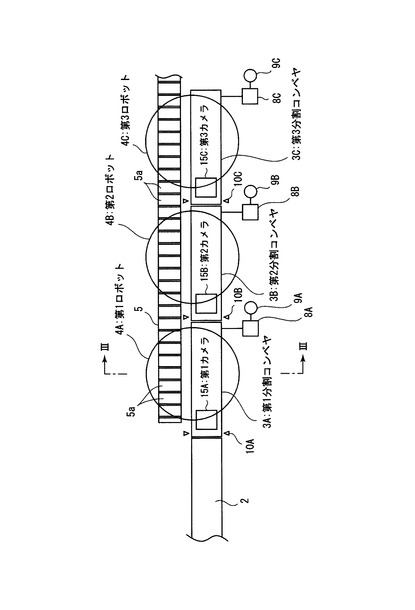
以下図示実施例について本発明を説明すると、図1において、例えばピロー包装されたスティック型のアイスクリームといった物品1(図2参照)は、搬送コンベヤ2によって連続的に搬送されるようになっている。上記搬送コンベヤ2の下流側には、図示実施例では3台の分割コンベヤ3A〜3Cが直列に配置してあり、上記搬送コンベヤ2からの物品1を、第1分割コンベヤ3A、第2分割コンベヤ3B、および第3分割コンベヤ3Cの順に受け渡すことができるようになっている。
このとき、下流側の分割コンベヤ3A〜3Cとなるに従って順次搬送速度が高速となるように設定してあり、それにより相互に接触した状態で搬送されてきた物品1を、それぞれの受け渡しの際に分離させることが可能となるようにしてある。
【0013】
各分割コンベヤ3A〜3Cの上方には、図2に示すように、それぞれ従来周知のパラレルリンク型ロボット4A〜4Cが設けられている。図1では、各ロボット4A〜4Cをそれらの円形の稼動領域として示してある。
上記各分割コンベヤ3A〜3Cの側方には、それらと平行にバケットコンベヤ5が設けられており、上記各ロボット4A〜4Cは、搬送コンベヤ2から各分割コンベヤ3A〜3Cに受け渡された物品1を保持して、上記バケットコンベヤ5の各バケット5a内へ受け渡すことができるようになっている。
【0014】
ところで、従来は1つの搬送コンベヤ2の下流側に複数台のロボット4A〜4Cを設けて該搬送コンベヤ2からそれぞれ物品1を受け取るようにしていたが、本実施例では搬送コンベヤ2を分割してその下流側にそれぞれ専用の分割コンベヤ3A〜3Cを設け、各ロボット4A〜4Cはそれぞれ専用の分割コンベヤ3A〜3Cから物品1を受け取ることができるようにしてある。
各分割コンベヤ3A〜3Cはそれぞれモータ8A〜8Cによって別個に運転されるようになっており、各分割コンベヤ3A〜3Cの搬送量は、モータ8A〜8Cに設けたエンコーダ9A〜9Cによって検出することができるようにしてある。各分割コンベヤ3A〜3Cの上流側には、各分割コンベヤ3A〜3Cに供給された物品1の有無を検出するセンサ10A〜10Cを設けてあり、各センサ10A〜10Cによってそれぞれの分割コンベヤ3A〜3Cに物品1が供給されたか否かを検出することができるようにしてある。
【0015】
さらに各分割コンベヤ3A〜3Cの上流側には、各分割コンベヤ3A〜3Cに供給された物品1を撮影するカメラ15A〜15Cを設けてあり、図4に示すように、各カメラ15A〜15Cによって撮影された映像は制御装置16の一部を構成する3つのロボット制御手段17A〜17Cのそれぞれに入力されるようになっている。
各ロボット制御手段17A〜17Cは、上記カメラ15A〜15Cからの映像を入力するともに、上記エンコーダ9A〜9Cからの信号も入力しており、それら信号に基づいて各分割コンベヤ3A〜3C上に供給された物品1を各ロボット4A〜4Cによって保持させることができるようになっている。
そして図示しないが、バケットコンベヤ5を駆動するモータに設けられたエンコーダからの信号も入力しており、その信号に基づいて各ロボット4A〜4Cに保持した物品1をバケットコンベヤ5のバケット5a内に受け渡すことができるようになっている。
【0016】
他方、上記センサ10A〜10Cからの信号は、上記制御装置16の一部を構成する3つの分割コンベヤ制御手段18A〜18Cに入力され、各分割コンベヤ制御手段18A〜18Cは、各センサ10A〜10Cからの信号を入力したら、すなわち物品1が供給されたことを検出したら、所要時間だけ各モータ8A〜8Cを起動して各分割コンベヤ3A〜3Cを運転させ、引き続き物品1が供給されていることがセンサ10A〜10Cによって検出された場合には、継続して各分割コンベヤ3A〜3Cを運転させるようになっている。
他方、各センサ10A〜10Cによって物品1が検出されなくなった場合には、上記所要時間経過後に各モータ8A〜8Cの運転を停止させるようになっている。
【0017】
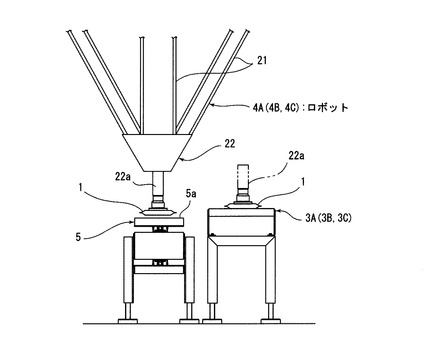
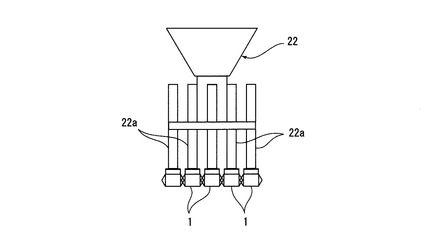
次に、上述したパラレルリンク型ロボット4A〜4Cはいずれも同一構成を備えており、図2に示すように、それぞれ複数の脚部21と、各脚部21の下部に設けられた物品保持手段22とを備えている。該物品保持手段22は、本実施例では図3に示すように、一列に配列した5本の吸着手段22aを備えており、各吸着手段22aによってピロー包装された物品1の表面を吸着保持することができるようになっている。
各吸着手段22aはそれぞれ昇降可能となっており、上記各ロボット制御手段17A〜17Cは、物品1を各吸着手段22aによって吸着保持する際には、5本ある吸着手段22aの内の1つを降下させて、降下させた吸着手段22aによって1つの物品1を吸着保持させるようになっている。この際、物品1は、5本の吸着手段22aの配列方向と直交する方向に向けられて、その中央部分が降下された吸着手段22aによって吸着保持されるようになっている。
【0018】
上記5本の吸着手段22aは、所定の順番で1つずつ降下されてそれぞれ物品1を吸着保持し、全ての吸着手段22aによって吸着保持された物品1は、相互に平行な状態に配列されるようになる(図3参照)。
このようにして物品保持手段22に5本の物品1が保持されたら、この5本の物品1はバケットコンベヤ5のバケット5a内に受け渡されるようになる。
本実施例では、1つのバケット5a内に5本の物品1を2段積みで供給するようになっており、そのために、後に詳述するように、各分割コンベヤ3A〜3C上に10本以上の物品1が供給されたことが確認されたら、10本以上の物品1が供給された分割コンベヤ3A〜3Cにおけるロボット4A〜4Cが作動されて、5本ずつの物品1を2段積みで1つのバケット5a内に供給するようになっている。
なお、上記バケットコンベヤ5は、1つのバケット5a内に供給された10本の物品1をそれぞれ1つの箱内に収容する包装機械の一部を構成している。
【0019】
以上の構成において、最初に、多数の物品が搬送コンベヤ2によって連続して搬送されてきた場合について説明する。
上記搬送コンベヤ2によって搬送されてきた物品1は、先ず第1分割コンベヤ3Aに受け渡される。第1分割コンベヤ3Aに物品1が供給されたことが第1センサ10Aによって検出されると、第1分割コンベヤ3Aが起動されて当該物品1が下流側に移送される。
搬送コンベヤ2によって搬送されてきた多数の物品1は、連続的に第1分割コンベヤ3Aに供給されるので、第1分割コンベヤ3Aは連続的に運転されて物品1を下流側に搬送するようになる。
【0020】
第1分割コンベヤ3Aに供給された物品1は第1カメラ15Aによって撮影され、第1ロボット制御手段17Aによってその方向や位置が確認される。第1ロボット4Aは、第1分割コンベヤ3Aに物品1が供給されても、その数が所定数以上となるまでは、物品1を吸着保持することはない。
第1カメラ15Aによって第1分割コンベヤ3A上に10本以上の物品が供給されたことが確認されたら、第1ロボット4Aは先ず5本分の物品1を物品保持手段22の各吸着手段22aによって吸着保持して、該5本の物品1をバケットコンベヤ5のバケット5a内に受け渡す。
【0021】
引き続き上記第1ロボット4Aは第1分割コンベヤ3Aに供給されている5本の物品1を物品保持手段22の吸着手段22aによって吸着保持し、新たに吸着した5本の物品1を、既にバケット5a内に受け渡してある5本の物品1上に載置し、それによって1つのバケット5a内に5本2段の合計10本の物品1を供給する。
これにより、1つのバケット5a内に受け渡された合計10本の物品1は、包装機械によって1つの箱内に収容されるようになる。
なお、第1ロボット4Aに関しては、所定数である10本の物品よりも少ない例えば8本の物品1が供給された時点で、バケット5a内への受け渡しを開始させるようにしても良い。これは、第1ロボット4Aに対してはその他のロボットよりも優先的に物品が供給されるので、1つのバケット5a内に所定数の物品1が供給できなくなる危険性が小さいからである。
【0022】
上述したように、多数の物品1が搬送コンベヤ2によって連続して搬送されてきている場合には、第1ロボット4Aだけでは全ての物品を処理することができず、処理できなかった物品は下流側の第2分割コンベヤ3Bに供給されるようになる。
この第2分割コンベヤ3Bと第2ロボット4Bの作動は、上述した第1分割コンベヤ3Aと第1ロボット4Aの場合と同一であり、第2ロボット4Bによって10本の物品が新たな空のバケット5a内に受け渡される。
そして更に、第2ロボット4Bで処理することができなかった物品は、下流側の第3分割コンベヤ3Cに供給されて、第3ロボット4Cにより上述したのと同一の作業が行われる。
この状態では、搬送コンベヤ2と3つの分割コンベヤ3A〜3Cは連続で運転されるようになり、上述したように各コンベヤの搬送速度は下流側となるに従って順次高速となるように設定してあるので、相互に接触した状態で搬送されてきた物品1は、それぞれの受け渡しの際に分離されるようになる。
【0023】
次に、搬送コンベヤ2によって搬送される物品の量が少なくなり、それによって第3分割コンベヤ3Cに供給される物品1が不足すると、第3センサ10Cによる物品1の検出ができなくなるので、第3分割コンベヤ制御手段18Cは所定時間経過後に第3分割コンベヤ3Cの運転を停止させる。
第3ロボット4Cは、それまでに第3分割コンベヤ3Cに供給された物品1を吸着手段22aによって保持するようになるが、10本以上の物品が第3分割コンベヤ3C上に供給されるまでは、既に吸着手段22aによって物品1を保持していても、保持した物品をバケット5aに受け渡すことは無い。
【0024】
この状態で、第3分割コンベヤ3Cに新たに物品1が供給されたことが第3センサ10Cによって検出されると、第3分割コンベヤ制御手段18Cは所要時間だけ第3モータ8Cを起動して第3分割コンベヤ3Cを運転させ、引き続き物品1が供給されたことが第3センサ10Cによって検出された場合には、継続して第3分割コンベヤ3Cを運転させる。他方、第3センサ10Cによる物品の検出がなくなった場合には、上記所要時間経過後に第3モータ8Cの運転を停止させる。
第3分割コンベヤ3C上に供給された物品1の数は、第3ロボット制御手段17Cが第3カメラ15Cの映像に基づいて監視しており、少なくとも10本の物品1が第3分割コンベヤ3C上に供給されたら、上述と同様にして第3ロボット4Cによって10本の物品が新たな空のバケット5a内に受け渡される。
【0025】
このように、搬送コンベヤ2によって搬送される物品の量が少なくなった場合には、第3分割コンベヤ3C上に10本以上の物品1が供給されるまでは該第3分割コンベヤ3Cは間欠的に運転されて、それによって第3分割コンベヤ3C上に所定数の物品1が貯溜されるように運転制御される。
そして第3分割コンベヤ3C上に10本以上の物品1が供給されると、上記第3ロボット4Cによって10本の物品1が1つのバケット5a内に受け渡されるので、搬送コンベヤ2によって搬送される物品の量が少なくなった場合であっても、第3ロボット4Cによって物品1を効率的に処理することができる。
また、上記第3分割コンベヤ3Cの運転は物品1の有無によって間欠的になるが、物品の検出がなくなった場合には所要時間経過後にその運転を停止させるようにしているので、隣接する物品1が相互に接触してしまうことを防止することができる。
【0026】
さらに、上記搬送コンベヤ2によって搬送される物品の量がより少なくなり、それによって第2分割コンベヤ3Bへの物品の供給が不足した場合の作動は、上述した第3分割コンベヤ3Cへの物品の供給が不足した場合の作動と同様である。
同様に、搬送コンベヤ2によって搬送される物品の量が更に少なくなって、第1分割コンベヤ3Aへの物品の供給が不足した場合の作動もまた、上述した第3分割コンベヤ3Cへの物品の供給が停止された場合の作動と同様である。
【0027】
ところで、既に所定数未満の物品1が供給された状態で運転が停止されているロボットに対しては、上流側のロボットに対して物品1が不足している旨の信号を発信して、下流側のロボットへの物品の供給を優先するようにしてある。
例えば、下流側の第2分割コンベヤ3B上に既に7本の物品1が供給された状態で該第2分割コンベヤ3Bの運転が停止されている状態では、当該7本の物品1がバケット5aに受け渡されずに未処理の状態となっている。このような状態で搬送コンベヤ2によって新たな物品1が供給されてきた際に、この新たに供給された物品1を上流側のロボット4Aで処理してしまうと、未処理の物品を抱える第2ロボット4Bは、いつまでも未処理の物品を抱えていることになる。
【0028】
このような場合には、第2ロボット4Bへ不足している3本の物品を供給することが必要なので、第2ロボット制御手段17Bから第1ロボット制御手段17Aに対して、物品1を3本処理せずに下流へ搬送するよう要求する。
第1ロボット制御手段17Aは第1ロボット4Aが10本の物品1を保持作業中の時はその要求を実行しないが、第1ロボット4Aが10本の物品1をバケット5aに受け渡して次の10本の物品1を保持する前など、第1ロボット4Aの保持動作に影響がでない状態であれば、第1ロボット4Aに物品1を3本保持しないよう指令する。
すると、搬送コンベヤ2によって新たな物品1が第1分割コンベヤ3A上に受け渡されてきても、第1ロボット4Aは当該物品1を保持することなく、3本の物品1を第2分割コンベヤ3Bへ受け渡すようになる。
これにより第2分割コンベヤ3Bへ不足していた3本の物品1が受け渡されるので、第2ロボット4Bは合計10本の物品1をバケット5aに受け渡すことができるようになる。
【0029】
なお、第2ロボット制御手段17Bは物品を優先的に搬送するよう第1ロボット制御手段17Aに要求した際には、第2分割コンベヤ制御手段18Bに対して3本の物品1が供給されたら、次の物品1が供給されなくても第2分割コンベヤ3Bを停止させずに駆動させて3本の物品を第2ロボット4Bが保持できる保持領域まで搬送するように要求する。これは、せっかく不足する3本の物品1が供給されても次の物品1が供給されないために物品1が保持領域に搬送されずに、第2ロボット4Bによる保持作業ができなくなるのを防ぐためである。また、このような制御は、受け渡しに時間がかかると溶けてしまうアイスクリームを処理する際に有効である。
そして第2ロボット4Bが10本の物品1をバケット5aに受け渡したら、第2ロボット制御手段17は第1ロボット制御手段17Aおよび第2分割コンベヤ制御手段18Bに受け渡し作業が終了したことを連絡する。
それにより、第1ロボット制御手段17Aと第2分割コンベヤ制御手段18Bは、それぞれ第1ロボット4Aと第2分割コンベヤ3Bを通常の制御に戻す。
【0030】
なお、物品1がピロー包装されたアイスクリームの場合のようにピロー包装機から搬送コンベヤ2に物品1を供給する場合には、当該搬送コンベヤ2には一般に所定本数ずつ、例えば24本ずつ間欠的に物品1が供給されるようになる。
このような場合には、第1分割コンベヤ3Aには物品が供給されないか、或いは必ず所定数以上の物品が供給されるかのどちらかであるから、当該第1分割コンベヤ3Aを省略してもよい。すなわちこのような場合には、第1分割コンベヤ3Aを省略して上記搬送コンベヤ2と一体とし、第1ロボット4Aによって搬送コンベヤ2上の物品を保持させるようにしてもよい。
また、上記実施例では3台の分割コンベヤ3A〜3Cとロボット4A〜4Cとを設けているが、2台であっても、或いは4台以上であってもよいことは勿論である。
さらに、上記実施例では各分割コンベヤ3A〜3C上に物品1が供給されたことを検出する検出手段として専用のセンサ10A〜10Cを設けているが、これに限定されるものではない。上記各カメラ15A〜15Cを上記検出手段として用い、各カメラ15A〜15Cの画像解析によって各分割コンベヤ3A〜3C上に物品1が供給されたことを検出するようにしてもよい。
【符号の説明】
【0031】
1 物品 2 搬送コンベヤ
3A〜3C 分割コンベヤ 4A〜4C ロボット
5 バケットコンベヤ 5a バケット
10A〜10C センサ 15A〜15C カメラ
16 制御装置 17A〜17C ロボット制御手段
18A〜18C 分割コンベヤ制御手段
【技術分野】
【0001】
本発明は物品処理装置に関し、より詳しくは、少なくとも2台のロボットを用いて搬送コンベヤ上から他の位置に物品を受け渡す物品処理装置に関する。
【背景技術】
【0002】
従来、物品処理装置として、搬送コンベヤの搬送方向に沿って2台のロボットを設け、各ロボットにより保持した物品を他の位置へ受け渡すようにしたものが知られている(特許文献1)。
より具体的には、上記物品処理装置は、物品を搬送する搬送コンベヤと、この搬送コンベヤの搬送方向に沿って設けた2台の第1ロボットと第2ロボットと、各ロボットのそれぞれの上流側に配置されて上記搬送コンベヤ上の物品を撮影する2台の第1カメラと第2カメラ、各カメラが撮影した物品の映像に基づいて上記各ロボットの作動をそれぞれ制御する第1ロボット制御手段と第2ロボット制御手段とを備え、それぞれのロボットによって搬送コンベヤ上の物品を保持するとともに、保持した物品を他の位置へ受け渡すようにしている。
そして上記物品処理装置では、上記各カメラが撮影した物品の映像をもとに、上流側の第1ロボットが上記搬送コンベヤによって搬送されてきた物品の一部を保持し、下流側の第2ロボットが上流側の第1ロボットによって保持されずに通過されてきた物品を保持するようになっている。
このような構成によれば、処理すべき物品が多くても、上記2台のロボットによって効率的に処理することが可能となる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3077563号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで従来、搬送コンベヤ上を搬送されてきた物品を所定数にまとめて他の位置へ受け渡すことが要求されることがある。例えば物品としてピロー包装されたスティック型のアイスクリームを10本まとめて他の位置であるバケットコンベヤの1つのバケット内に受け渡すことがある。この場合、バケットコンベヤは包装機械の一部を構成しており、バケットコンベヤの1つのバケット内に収容された10本のアイスクリームは、上記包装機械によって1つの箱内に包装されるようになる。
このような場合には、10本のアイスクリームを上記バケットコンベヤの1つのバケット内にまとめて受け渡す必要があり、それ未満の本数のアイスクリームを1つのバケット内に供給した場合には、不適正な包装となってしまう。
【0005】
しかるに、上述した従来の物品処理装置では、例えば15本のアイスクリームが搬送コンベヤによって供給されてきた場合には、上流側の第1ロボットは10本のアイスクリームを上記バケットコンベヤの第1バケット内に受け渡すことができる。
他方、下流側の第2ロボットには残りの5本のアイスクリームが供給されるだけなので、上述した不適正な包装を防止するためには、当該5本のアイスクリームを第2バケット内に受け渡すことはできない。このような場合には、当該5本のアイスクリームを第2ロボットの前を通過させて下流側の回収箱などで回収しており、非効率的であった。
【0006】
また従来、上記10本のアイスクリームを1つのバケット内にまとめて受け渡す場合に、該10本のアイスクリームを2回に分けて5本ずつ、1つの同一のバケット内に2段に積み重ねて受け渡すことも行われている。
この場合においては、上述した15本のアイスクリームが搬送コンベヤによって供給されてきた場合には、下流側の第2ロボットに残りの5本のアイスクリームが供給されるので、該第2ロボットは当該5本のアイスクリームを保持して1つのバケット内に供給することになる。
そして第2ロボットに引き続き新たに5本のアイスクリームが供給されてくれば、該第2ロボットはその新たに供給されてきた5本のアイスクリームを保持して、既に上記バケット内に供給した5本のアイスクリーム上に新たな5本のアイスクリームを積み重ねることができるようになる。
【0007】
しかしながらアイスクリームの供給量が少なくなると、該アイスクリームは上流側の第1ロボットによって優先的に保持されてしまうので、第2ロボットへの供給が滞りがちになり、第2ロボットに新たに5本のアイスクリームが供給されるのに時間がかかるようになる。
その場合には、第2ロボットに新たに5本のアイスクリームが供給された際には、既に5本のアイスクリームが供給されたバケットが第2ロボットによるアイスクリームの受け渡し領域を出てしまっている危険性があり、この場合にも上記包装機械による包装が不適正となる。
本発明はそのような事情に鑑み、搬送コンベヤ上を搬送されてきた物品を所定数にまとめて他の位置へ受け渡すことが要求される場合であっても、それら物品を上記第1ロボットと第2ロボットとで効率的に処理することができる物品処理装置を提供するものである。
【課題を解決するための手段】
【0008】
すなわち本発明は、物品を搬送する搬送コンベヤと、この搬送コンベヤの搬送方向に沿って設けた2台の第1ロボットと第2ロボットと、各ロボットのそれぞれの上流側に配置されて上記搬送コンベヤ上の物品を撮影する2台の第1カメラと第2カメラ、各カメラが撮影した物品の映像に基づいて上記各ロボットの作動をそれぞれ制御する第1ロボット制御手段と第2ロボット制御手段とを備え、それぞれのロボットによって搬送コンベヤ上の物品を保持するとともに、保持した物品を他の位置へ受け渡すようにした物品処理装置において、
上記各ロボットは、各ロボット制御手段によって所定数の複数の物品をまとめて他の位置へ受け渡すように制御されるようになっており、また上記第2ロボットに対して、上記搬送コンベヤを分割して該搬送コンベヤとは独立して運転制御される第2分割コンベヤを設けるとともに、該第2分割コンベヤを制御する第2分割コンベヤ制御手段を設け、
上記第2分割コンベヤ制御手段は、上記第2分割コンベヤ上に物品が供給されたことが検出されたら当該第2分割コンベヤを駆動させる一方、物品が供給されない場合には第2分割コンベヤを停止させることにより、該第2分割コンベヤ上に物品を貯溜させるように該第2分割コンベヤを運転制御し、
さらに上記第2ロボット制御手段は、上記第2分割コンベヤ上に上記所定数以上の物品が供給されたら第2ロボットを制御して上記所定数の物品を該第2分割コンベヤ上から他の位置へ受け渡すことを特徴とするものである。
【発明の効果】
【0009】
上記構成によれば、前述した例の場合に基づいて説明すれば、仮に15本のアイスクリームが搬送コンベヤによって供給されてきた場合には、上流側の第1ロボットは10本のアイスクリームを上記バケットコンベヤの第1バケット内に受け渡すことができる。
他方、下流側の第2ロボットには残りの5本のアイスクリームが供給されるだけなので、上述した不適正な包装を防止するためには、当該5本のアイスクリームを第2バケット内に受け渡すことはできない。しかるにこの場合には、上記第2分割コンベヤ制御手段は、上述した5本のアイスクリームを第2分割コンベヤ上に受け入れるが、その後のアイスクリームの供給がないので、該第2分割コンベヤの運転を停止させることになる。
【0010】
そして、追加の新たなアイスクリームが第2分割コンベヤ上に供給されると、上記分割コンベヤ制御手段によって第2分割コンベヤが駆動されて該第2分割コンベヤ上に上記追加のアイスクリームが受け入れられるようになり、その後のアイスクリームの供給がない場合には、再び第2分割コンベヤが停止されるようになる。
このような作動を繰り返して、上記第2分割コンベヤ上に10本以上のアイスクリームが供給されたら、上記第2ロボット制御手段は第2ロボットを制御して、10本のアイスクリームを上記バケットコンベヤのバケット内に受け渡すようになる。
このように本発明によれば、物品を所定数にまとめて他の位置へ受け渡すことが要求される場合であっても、上記ロボットにより従来に比較して効率的な処理を行うことができる。また、例えば上記10本のアイスクリームを5本ずつ2回の受け渡し動作によって2段済みにするような場合においても、円滑に処理することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施例を示す平面図。
【図2】図1のIII−III線に沿う断面図。
【図3】図2の要部の左側面図。
【図4】制御装置16を示す回路図。
【発明を実施するための形態】
【0012】
以下図示実施例について本発明を説明すると、図1において、例えばピロー包装されたスティック型のアイスクリームといった物品1(図2参照)は、搬送コンベヤ2によって連続的に搬送されるようになっている。上記搬送コンベヤ2の下流側には、図示実施例では3台の分割コンベヤ3A〜3Cが直列に配置してあり、上記搬送コンベヤ2からの物品1を、第1分割コンベヤ3A、第2分割コンベヤ3B、および第3分割コンベヤ3Cの順に受け渡すことができるようになっている。
このとき、下流側の分割コンベヤ3A〜3Cとなるに従って順次搬送速度が高速となるように設定してあり、それにより相互に接触した状態で搬送されてきた物品1を、それぞれの受け渡しの際に分離させることが可能となるようにしてある。
【0013】
各分割コンベヤ3A〜3Cの上方には、図2に示すように、それぞれ従来周知のパラレルリンク型ロボット4A〜4Cが設けられている。図1では、各ロボット4A〜4Cをそれらの円形の稼動領域として示してある。
上記各分割コンベヤ3A〜3Cの側方には、それらと平行にバケットコンベヤ5が設けられており、上記各ロボット4A〜4Cは、搬送コンベヤ2から各分割コンベヤ3A〜3Cに受け渡された物品1を保持して、上記バケットコンベヤ5の各バケット5a内へ受け渡すことができるようになっている。
【0014】
ところで、従来は1つの搬送コンベヤ2の下流側に複数台のロボット4A〜4Cを設けて該搬送コンベヤ2からそれぞれ物品1を受け取るようにしていたが、本実施例では搬送コンベヤ2を分割してその下流側にそれぞれ専用の分割コンベヤ3A〜3Cを設け、各ロボット4A〜4Cはそれぞれ専用の分割コンベヤ3A〜3Cから物品1を受け取ることができるようにしてある。
各分割コンベヤ3A〜3Cはそれぞれモータ8A〜8Cによって別個に運転されるようになっており、各分割コンベヤ3A〜3Cの搬送量は、モータ8A〜8Cに設けたエンコーダ9A〜9Cによって検出することができるようにしてある。各分割コンベヤ3A〜3Cの上流側には、各分割コンベヤ3A〜3Cに供給された物品1の有無を検出するセンサ10A〜10Cを設けてあり、各センサ10A〜10Cによってそれぞれの分割コンベヤ3A〜3Cに物品1が供給されたか否かを検出することができるようにしてある。
【0015】
さらに各分割コンベヤ3A〜3Cの上流側には、各分割コンベヤ3A〜3Cに供給された物品1を撮影するカメラ15A〜15Cを設けてあり、図4に示すように、各カメラ15A〜15Cによって撮影された映像は制御装置16の一部を構成する3つのロボット制御手段17A〜17Cのそれぞれに入力されるようになっている。
各ロボット制御手段17A〜17Cは、上記カメラ15A〜15Cからの映像を入力するともに、上記エンコーダ9A〜9Cからの信号も入力しており、それら信号に基づいて各分割コンベヤ3A〜3C上に供給された物品1を各ロボット4A〜4Cによって保持させることができるようになっている。
そして図示しないが、バケットコンベヤ5を駆動するモータに設けられたエンコーダからの信号も入力しており、その信号に基づいて各ロボット4A〜4Cに保持した物品1をバケットコンベヤ5のバケット5a内に受け渡すことができるようになっている。
【0016】
他方、上記センサ10A〜10Cからの信号は、上記制御装置16の一部を構成する3つの分割コンベヤ制御手段18A〜18Cに入力され、各分割コンベヤ制御手段18A〜18Cは、各センサ10A〜10Cからの信号を入力したら、すなわち物品1が供給されたことを検出したら、所要時間だけ各モータ8A〜8Cを起動して各分割コンベヤ3A〜3Cを運転させ、引き続き物品1が供給されていることがセンサ10A〜10Cによって検出された場合には、継続して各分割コンベヤ3A〜3Cを運転させるようになっている。
他方、各センサ10A〜10Cによって物品1が検出されなくなった場合には、上記所要時間経過後に各モータ8A〜8Cの運転を停止させるようになっている。
【0017】
次に、上述したパラレルリンク型ロボット4A〜4Cはいずれも同一構成を備えており、図2に示すように、それぞれ複数の脚部21と、各脚部21の下部に設けられた物品保持手段22とを備えている。該物品保持手段22は、本実施例では図3に示すように、一列に配列した5本の吸着手段22aを備えており、各吸着手段22aによってピロー包装された物品1の表面を吸着保持することができるようになっている。
各吸着手段22aはそれぞれ昇降可能となっており、上記各ロボット制御手段17A〜17Cは、物品1を各吸着手段22aによって吸着保持する際には、5本ある吸着手段22aの内の1つを降下させて、降下させた吸着手段22aによって1つの物品1を吸着保持させるようになっている。この際、物品1は、5本の吸着手段22aの配列方向と直交する方向に向けられて、その中央部分が降下された吸着手段22aによって吸着保持されるようになっている。
【0018】
上記5本の吸着手段22aは、所定の順番で1つずつ降下されてそれぞれ物品1を吸着保持し、全ての吸着手段22aによって吸着保持された物品1は、相互に平行な状態に配列されるようになる(図3参照)。
このようにして物品保持手段22に5本の物品1が保持されたら、この5本の物品1はバケットコンベヤ5のバケット5a内に受け渡されるようになる。
本実施例では、1つのバケット5a内に5本の物品1を2段積みで供給するようになっており、そのために、後に詳述するように、各分割コンベヤ3A〜3C上に10本以上の物品1が供給されたことが確認されたら、10本以上の物品1が供給された分割コンベヤ3A〜3Cにおけるロボット4A〜4Cが作動されて、5本ずつの物品1を2段積みで1つのバケット5a内に供給するようになっている。
なお、上記バケットコンベヤ5は、1つのバケット5a内に供給された10本の物品1をそれぞれ1つの箱内に収容する包装機械の一部を構成している。
【0019】
以上の構成において、最初に、多数の物品が搬送コンベヤ2によって連続して搬送されてきた場合について説明する。
上記搬送コンベヤ2によって搬送されてきた物品1は、先ず第1分割コンベヤ3Aに受け渡される。第1分割コンベヤ3Aに物品1が供給されたことが第1センサ10Aによって検出されると、第1分割コンベヤ3Aが起動されて当該物品1が下流側に移送される。
搬送コンベヤ2によって搬送されてきた多数の物品1は、連続的に第1分割コンベヤ3Aに供給されるので、第1分割コンベヤ3Aは連続的に運転されて物品1を下流側に搬送するようになる。
【0020】
第1分割コンベヤ3Aに供給された物品1は第1カメラ15Aによって撮影され、第1ロボット制御手段17Aによってその方向や位置が確認される。第1ロボット4Aは、第1分割コンベヤ3Aに物品1が供給されても、その数が所定数以上となるまでは、物品1を吸着保持することはない。
第1カメラ15Aによって第1分割コンベヤ3A上に10本以上の物品が供給されたことが確認されたら、第1ロボット4Aは先ず5本分の物品1を物品保持手段22の各吸着手段22aによって吸着保持して、該5本の物品1をバケットコンベヤ5のバケット5a内に受け渡す。
【0021】
引き続き上記第1ロボット4Aは第1分割コンベヤ3Aに供給されている5本の物品1を物品保持手段22の吸着手段22aによって吸着保持し、新たに吸着した5本の物品1を、既にバケット5a内に受け渡してある5本の物品1上に載置し、それによって1つのバケット5a内に5本2段の合計10本の物品1を供給する。
これにより、1つのバケット5a内に受け渡された合計10本の物品1は、包装機械によって1つの箱内に収容されるようになる。
なお、第1ロボット4Aに関しては、所定数である10本の物品よりも少ない例えば8本の物品1が供給された時点で、バケット5a内への受け渡しを開始させるようにしても良い。これは、第1ロボット4Aに対してはその他のロボットよりも優先的に物品が供給されるので、1つのバケット5a内に所定数の物品1が供給できなくなる危険性が小さいからである。
【0022】
上述したように、多数の物品1が搬送コンベヤ2によって連続して搬送されてきている場合には、第1ロボット4Aだけでは全ての物品を処理することができず、処理できなかった物品は下流側の第2分割コンベヤ3Bに供給されるようになる。
この第2分割コンベヤ3Bと第2ロボット4Bの作動は、上述した第1分割コンベヤ3Aと第1ロボット4Aの場合と同一であり、第2ロボット4Bによって10本の物品が新たな空のバケット5a内に受け渡される。
そして更に、第2ロボット4Bで処理することができなかった物品は、下流側の第3分割コンベヤ3Cに供給されて、第3ロボット4Cにより上述したのと同一の作業が行われる。
この状態では、搬送コンベヤ2と3つの分割コンベヤ3A〜3Cは連続で運転されるようになり、上述したように各コンベヤの搬送速度は下流側となるに従って順次高速となるように設定してあるので、相互に接触した状態で搬送されてきた物品1は、それぞれの受け渡しの際に分離されるようになる。
【0023】
次に、搬送コンベヤ2によって搬送される物品の量が少なくなり、それによって第3分割コンベヤ3Cに供給される物品1が不足すると、第3センサ10Cによる物品1の検出ができなくなるので、第3分割コンベヤ制御手段18Cは所定時間経過後に第3分割コンベヤ3Cの運転を停止させる。
第3ロボット4Cは、それまでに第3分割コンベヤ3Cに供給された物品1を吸着手段22aによって保持するようになるが、10本以上の物品が第3分割コンベヤ3C上に供給されるまでは、既に吸着手段22aによって物品1を保持していても、保持した物品をバケット5aに受け渡すことは無い。
【0024】
この状態で、第3分割コンベヤ3Cに新たに物品1が供給されたことが第3センサ10Cによって検出されると、第3分割コンベヤ制御手段18Cは所要時間だけ第3モータ8Cを起動して第3分割コンベヤ3Cを運転させ、引き続き物品1が供給されたことが第3センサ10Cによって検出された場合には、継続して第3分割コンベヤ3Cを運転させる。他方、第3センサ10Cによる物品の検出がなくなった場合には、上記所要時間経過後に第3モータ8Cの運転を停止させる。
第3分割コンベヤ3C上に供給された物品1の数は、第3ロボット制御手段17Cが第3カメラ15Cの映像に基づいて監視しており、少なくとも10本の物品1が第3分割コンベヤ3C上に供給されたら、上述と同様にして第3ロボット4Cによって10本の物品が新たな空のバケット5a内に受け渡される。
【0025】
このように、搬送コンベヤ2によって搬送される物品の量が少なくなった場合には、第3分割コンベヤ3C上に10本以上の物品1が供給されるまでは該第3分割コンベヤ3Cは間欠的に運転されて、それによって第3分割コンベヤ3C上に所定数の物品1が貯溜されるように運転制御される。
そして第3分割コンベヤ3C上に10本以上の物品1が供給されると、上記第3ロボット4Cによって10本の物品1が1つのバケット5a内に受け渡されるので、搬送コンベヤ2によって搬送される物品の量が少なくなった場合であっても、第3ロボット4Cによって物品1を効率的に処理することができる。
また、上記第3分割コンベヤ3Cの運転は物品1の有無によって間欠的になるが、物品の検出がなくなった場合には所要時間経過後にその運転を停止させるようにしているので、隣接する物品1が相互に接触してしまうことを防止することができる。
【0026】
さらに、上記搬送コンベヤ2によって搬送される物品の量がより少なくなり、それによって第2分割コンベヤ3Bへの物品の供給が不足した場合の作動は、上述した第3分割コンベヤ3Cへの物品の供給が不足した場合の作動と同様である。
同様に、搬送コンベヤ2によって搬送される物品の量が更に少なくなって、第1分割コンベヤ3Aへの物品の供給が不足した場合の作動もまた、上述した第3分割コンベヤ3Cへの物品の供給が停止された場合の作動と同様である。
【0027】
ところで、既に所定数未満の物品1が供給された状態で運転が停止されているロボットに対しては、上流側のロボットに対して物品1が不足している旨の信号を発信して、下流側のロボットへの物品の供給を優先するようにしてある。
例えば、下流側の第2分割コンベヤ3B上に既に7本の物品1が供給された状態で該第2分割コンベヤ3Bの運転が停止されている状態では、当該7本の物品1がバケット5aに受け渡されずに未処理の状態となっている。このような状態で搬送コンベヤ2によって新たな物品1が供給されてきた際に、この新たに供給された物品1を上流側のロボット4Aで処理してしまうと、未処理の物品を抱える第2ロボット4Bは、いつまでも未処理の物品を抱えていることになる。
【0028】
このような場合には、第2ロボット4Bへ不足している3本の物品を供給することが必要なので、第2ロボット制御手段17Bから第1ロボット制御手段17Aに対して、物品1を3本処理せずに下流へ搬送するよう要求する。
第1ロボット制御手段17Aは第1ロボット4Aが10本の物品1を保持作業中の時はその要求を実行しないが、第1ロボット4Aが10本の物品1をバケット5aに受け渡して次の10本の物品1を保持する前など、第1ロボット4Aの保持動作に影響がでない状態であれば、第1ロボット4Aに物品1を3本保持しないよう指令する。
すると、搬送コンベヤ2によって新たな物品1が第1分割コンベヤ3A上に受け渡されてきても、第1ロボット4Aは当該物品1を保持することなく、3本の物品1を第2分割コンベヤ3Bへ受け渡すようになる。
これにより第2分割コンベヤ3Bへ不足していた3本の物品1が受け渡されるので、第2ロボット4Bは合計10本の物品1をバケット5aに受け渡すことができるようになる。
【0029】
なお、第2ロボット制御手段17Bは物品を優先的に搬送するよう第1ロボット制御手段17Aに要求した際には、第2分割コンベヤ制御手段18Bに対して3本の物品1が供給されたら、次の物品1が供給されなくても第2分割コンベヤ3Bを停止させずに駆動させて3本の物品を第2ロボット4Bが保持できる保持領域まで搬送するように要求する。これは、せっかく不足する3本の物品1が供給されても次の物品1が供給されないために物品1が保持領域に搬送されずに、第2ロボット4Bによる保持作業ができなくなるのを防ぐためである。また、このような制御は、受け渡しに時間がかかると溶けてしまうアイスクリームを処理する際に有効である。
そして第2ロボット4Bが10本の物品1をバケット5aに受け渡したら、第2ロボット制御手段17は第1ロボット制御手段17Aおよび第2分割コンベヤ制御手段18Bに受け渡し作業が終了したことを連絡する。
それにより、第1ロボット制御手段17Aと第2分割コンベヤ制御手段18Bは、それぞれ第1ロボット4Aと第2分割コンベヤ3Bを通常の制御に戻す。
【0030】
なお、物品1がピロー包装されたアイスクリームの場合のようにピロー包装機から搬送コンベヤ2に物品1を供給する場合には、当該搬送コンベヤ2には一般に所定本数ずつ、例えば24本ずつ間欠的に物品1が供給されるようになる。
このような場合には、第1分割コンベヤ3Aには物品が供給されないか、或いは必ず所定数以上の物品が供給されるかのどちらかであるから、当該第1分割コンベヤ3Aを省略してもよい。すなわちこのような場合には、第1分割コンベヤ3Aを省略して上記搬送コンベヤ2と一体とし、第1ロボット4Aによって搬送コンベヤ2上の物品を保持させるようにしてもよい。
また、上記実施例では3台の分割コンベヤ3A〜3Cとロボット4A〜4Cとを設けているが、2台であっても、或いは4台以上であってもよいことは勿論である。
さらに、上記実施例では各分割コンベヤ3A〜3C上に物品1が供給されたことを検出する検出手段として専用のセンサ10A〜10Cを設けているが、これに限定されるものではない。上記各カメラ15A〜15Cを上記検出手段として用い、各カメラ15A〜15Cの画像解析によって各分割コンベヤ3A〜3C上に物品1が供給されたことを検出するようにしてもよい。
【符号の説明】
【0031】
1 物品 2 搬送コンベヤ
3A〜3C 分割コンベヤ 4A〜4C ロボット
5 バケットコンベヤ 5a バケット
10A〜10C センサ 15A〜15C カメラ
16 制御装置 17A〜17C ロボット制御手段
18A〜18C 分割コンベヤ制御手段
【特許請求の範囲】
【請求項1】
物品を搬送する搬送コンベヤと、この搬送コンベヤの搬送方向に沿って設けた2台の第1ロボットと第2ロボットと、各ロボットのそれぞれの上流側に配置されて上記搬送コンベヤ上の物品を撮影する2台の第1カメラと第2カメラ、各カメラが撮影した物品の映像に基づいて上記各ロボットの作動をそれぞれ制御する第1ロボット制御手段と第2ロボット制御手段とを備え、それぞれのロボットによって搬送コンベヤ上の物品を保持するとともに、保持した物品を他の位置へ受け渡すようにした物品処理装置において、
上記各ロボットは、各ロボット制御手段によって所定数の複数の物品をまとめて他の位置へ受け渡すように制御されるようになっており、また上記第2ロボットに対して、上記搬送コンベヤを分割して該搬送コンベヤとは独立して運転制御される第2分割コンベヤを設けるとともに、該第2分割コンベヤを制御する第2分割コンベヤ制御手段を設け、
上記第2分割コンベヤ制御手段は、上記第2分割コンベヤ上に物品が供給されたことが検出されたら当該第2分割コンベヤを駆動させる一方、物品が供給されない場合には第2分割コンベヤを停止させることにより、該第2分割コンベヤ上に物品を貯溜させるように該第2分割コンベヤを運転制御し、
さらに上記第2ロボット制御手段は、上記第2分割コンベヤ上に上記所定数以上の物品が供給されたら第2ロボットを制御して上記所定数の物品を該第2分割コンベヤ上から他の位置へ受け渡すことを特徴とする物品処理装置。
【請求項2】
上記第1ロボットに対して、上記搬送コンベヤとは独立して運転制御される第1分割コンベヤが設けられるとともに、該第1分割コンベヤを制御する第1分割コンベヤ制御手段が設けられ、
上記第1分割コンベヤ制御手段は、上記第1分割コンベヤ上に物品が供給されたことが検出されたら当該第1分割コンベヤを駆動させる一方、物品が供給されない場合には第1分割コンベヤを停止させることにより、該第1分割コンベヤ上に物品を貯溜させるように該第1分割コンベヤを運転制御し、
さらに上記第1ロボット制御手段は、上記第1分割コンベヤ上に上記所定数以上の物品が供給されたら第1ロボットを制御して上記所定数の物品を該第1分割コンベヤ上から他の位置へ受け渡すことを特徴とする請求項1に記載の物品処理装置。
【請求項3】
上記第2分割コンベヤ上の物品が上記所定数未満の場合には、上記第2分割コンベヤに優先的に物品を供給し、上記第2分割コンベヤ上に上記所定数以上の物品が供給されたら、上記第2ロボットにより上記所定数の物品を該第2分割コンベヤ上から他の位置へ受け渡すことを特徴とする請求項1又は請求項2に記載の物品処理装置。
【請求項4】
上記分割コンベヤは、隣接する上流側のコンベヤよりも搬送速度が高速となるように設定されていることを特徴とする請求項1ないし請求項3のいずれかに記載の物品処理装置。
【請求項1】
物品を搬送する搬送コンベヤと、この搬送コンベヤの搬送方向に沿って設けた2台の第1ロボットと第2ロボットと、各ロボットのそれぞれの上流側に配置されて上記搬送コンベヤ上の物品を撮影する2台の第1カメラと第2カメラ、各カメラが撮影した物品の映像に基づいて上記各ロボットの作動をそれぞれ制御する第1ロボット制御手段と第2ロボット制御手段とを備え、それぞれのロボットによって搬送コンベヤ上の物品を保持するとともに、保持した物品を他の位置へ受け渡すようにした物品処理装置において、
上記各ロボットは、各ロボット制御手段によって所定数の複数の物品をまとめて他の位置へ受け渡すように制御されるようになっており、また上記第2ロボットに対して、上記搬送コンベヤを分割して該搬送コンベヤとは独立して運転制御される第2分割コンベヤを設けるとともに、該第2分割コンベヤを制御する第2分割コンベヤ制御手段を設け、
上記第2分割コンベヤ制御手段は、上記第2分割コンベヤ上に物品が供給されたことが検出されたら当該第2分割コンベヤを駆動させる一方、物品が供給されない場合には第2分割コンベヤを停止させることにより、該第2分割コンベヤ上に物品を貯溜させるように該第2分割コンベヤを運転制御し、
さらに上記第2ロボット制御手段は、上記第2分割コンベヤ上に上記所定数以上の物品が供給されたら第2ロボットを制御して上記所定数の物品を該第2分割コンベヤ上から他の位置へ受け渡すことを特徴とする物品処理装置。
【請求項2】
上記第1ロボットに対して、上記搬送コンベヤとは独立して運転制御される第1分割コンベヤが設けられるとともに、該第1分割コンベヤを制御する第1分割コンベヤ制御手段が設けられ、
上記第1分割コンベヤ制御手段は、上記第1分割コンベヤ上に物品が供給されたことが検出されたら当該第1分割コンベヤを駆動させる一方、物品が供給されない場合には第1分割コンベヤを停止させることにより、該第1分割コンベヤ上に物品を貯溜させるように該第1分割コンベヤを運転制御し、
さらに上記第1ロボット制御手段は、上記第1分割コンベヤ上に上記所定数以上の物品が供給されたら第1ロボットを制御して上記所定数の物品を該第1分割コンベヤ上から他の位置へ受け渡すことを特徴とする請求項1に記載の物品処理装置。
【請求項3】
上記第2分割コンベヤ上の物品が上記所定数未満の場合には、上記第2分割コンベヤに優先的に物品を供給し、上記第2分割コンベヤ上に上記所定数以上の物品が供給されたら、上記第2ロボットにより上記所定数の物品を該第2分割コンベヤ上から他の位置へ受け渡すことを特徴とする請求項1又は請求項2に記載の物品処理装置。
【請求項4】
上記分割コンベヤは、隣接する上流側のコンベヤよりも搬送速度が高速となるように設定されていることを特徴とする請求項1ないし請求項3のいずれかに記載の物品処理装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−49505(P2013−49505A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2011−187519(P2011−187519)
【出願日】平成23年8月30日(2011.8.30)
【出願人】(000253019)澁谷工業株式会社 (503)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成23年8月30日(2011.8.30)
【出願人】(000253019)澁谷工業株式会社 (503)
【Fターム(参考)】
[ Back to top ]