
物品収納設備
【課題】収納効率を確保しつつ、構成の簡素化を図ることができながら、偏荷重のある物品でも適切に移載することが可能な物品収納設備を提供すること。
【解決手段】スタッカークレーンの移載手段が、載置支持部MSを備え、収納部と載置支持部との間で物品Cを棚前後方向に沿って移動させる移動操作装置Tとして、物品の正面側被係止部24に係脱自在な正面係止体FKを棚前後方向に移動自在に備えて、正面側被係止部24に正面係止体FKを係止させた状態で、収納位置と中継位置との間で物品Cを移動させる正面係止式移動操作装置FTと、物品Cの棚左右方向の両側面部に形成された縦方向に沿うリブ22に対して各別に係脱自在な左右一対の側面係止体SKを棚前後方向に移動自在に備えて、リブ22に側面係止体SKを係止させた状態で、中継位置と載置位置との間で物品を移動させる側面係止式移動操作装置STとを備えて構成されている。
【解決手段】スタッカークレーンの移載手段が、載置支持部MSを備え、収納部と載置支持部との間で物品Cを棚前後方向に沿って移動させる移動操作装置Tとして、物品の正面側被係止部24に係脱自在な正面係止体FKを棚前後方向に移動自在に備えて、正面側被係止部24に正面係止体FKを係止させた状態で、収納位置と中継位置との間で物品Cを移動させる正面係止式移動操作装置FTと、物品Cの棚左右方向の両側面部に形成された縦方向に沿うリブ22に対して各別に係脱自在な左右一対の側面係止体SKを棚前後方向に移動自在に備えて、リブ22に側面係止体SKを係止させた状態で、中継位置と載置位置との間で物品を移動させる側面係止式移動操作装置STとを備えて構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、平面視矩形状の物品を載置支持する収納部が上下左右に並ぶ状態で配設された物品収納棚と、前記物品収納棚の前面側において走行自在で、かつ、前記収納部との間で物品を移載自在な移載手段を昇降自在に備えて構成されたスタッカークレーンとが設けられた物品収納設備に関する。
【背景技術】
【0002】
上記物品収納設備は、物品として、例えば、荷を収容自在なコンテナを、物品収納棚における複数の収納部にて保管するものであり、収納部に対する物品の取り出し及び受け渡しは、スタッカークレーンにより自動的に行われる。
ところで、一般に物品収納設備では、収納可能な物品の個数が多いことだけでなく、設備の設置空間に対する物品の収納可能数が多いこと、つまり、収納効率が高いことが望まれる。
例えば、収納部に収納されている物品の底面よりも下方の空間にフォークを突入させて掬い取る方式(例えば、特許文献1参照。)を採用した場合、上下に隣接する収納部に収納される物品の間には移載対象の物品の底面よりも下方にフォーク突入用の空間を形成しなければならない分、上下方向での収納効率が悪くなる。また、収納部に収納されている物品の両側方の空間に左右一対のフォークを突入させて物品を挟持した状態で引き出す方式(例えば、特許文献2参照。)の場合、各物品の両側方にはフォーク突入用の空間を形成しなければならない分、棚左右方向での収納効率が悪くなる。
そこで、従来より、収納部に収納される物品の上下左右の間隔を極力小さくして物品収納棚の収納効率を高くすることができる構成として、移載手段が、物品を載置支持する載置支持部と、収納部における収納位置と載置支持部における載置位置との間で物品を移動させる移動操作装置とを備えて構成され、移動操作装置として、移載対象の物品の棚前後方向で前側の正面部に設けられた正面側被係止部に係脱自在な正面係止体を棚前後方向に移動自在に備えて、移載対象の物品を棚前後方向に移動させる正面係止式移動操作装置と、移載対象の物品の底面に接触する搬送ベルトを巻回作動自在に備えて物品を棚前後方向に移動させる底面接触式移動操作装置とを備えて構成されたものが提案されている(例えば、特許文献3参照。)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−191109号公報
【特許文献2】特開2006−160496号公報
【特許文献3】特許第3603992号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献3のものでは、正面係止体が、多段フォークの最上段のフォーク体の上部において棚前後方向に移動自在に設けられているため、フォーク体を引退位置に位置させたときのフォーク体の棚前後方向で後側(出退方向で突出側)の端部よりも棚前後方向で前方側(出退方向で引退側)に、正面係止体を位置させることができる。したがって、収納部に収納されている物品を移載手段に移載する場合、正面係止式移動操作装置により移載対象の物品を棚前後方向で十分装置内方となる位置まで移動させて、底面接触式移動操作装置の搬送ベルトの搬送作用領域として移載対象の物品の底面における棚前後方向で後側の端部から装置内方側に渡る棚前後方向で長い範囲に亘る領域を確保できる。そのため、物品の底面の広い領域に対して搬送ベルトによる搬送力が作用するので、物品に棚前後方向又は棚左右方向で偏荷重が存在していても物品を載置支持部の載置位置まで的確に移動させることができる。
しかしながら、上記特許文献3のような構成では、多段フォークの最上段のフォーク体の上部において正面係止体を棚前後方向に移動自在に設けるため、正面係止体の支持構造が複雑になってしまう。
また、最上段のフォーク体の上部に係止体が位置していることから、多段フォークの突出時の先端部の上下方向の寸法が大きくなってしまうので、正面側係止部が物品の正面部において下方側に位置している場合に、その正面側係止部に対して下方から正面係止体を係合させるためには、上下方向に大きな寸法の先端部分を物品収納棚側に突入させることができるように、物品の上下間隔を大きくしなければならない。このように、最上段のフォーク体の上部に係止体が位置していると、物品の上下高さと正面側被係止部の上下位置との関係によっては、物品の上下間隔を大きくしなければならない場合がある。
ちなみに、特許文献3のものでは、正面側被係止部に対して、上下いずれの方向からも正面係止体を係合させることができるものであるから、上下の物品の間隔を極力大きくせずに済むものであるが、物品の正面側被係止部に対して下方からしか正面係止体を係合させることができない仕様の物品である場合は、やはり、物品の上下間隔を大きくしなければならないおそれがある。
上記のような構成の複雑化と収納効率の低下の問題を回避するため、正面係止体を最上段のフォーク体の棚前後方向で棚側の先端部に固定状態で設けて、物品収納棚側に突入させる先端部分の厚みを薄くすることが考えられる。しかし、その場合、正面係止体は最上段のフォーク体を引退位置に引退させたときの位置までしか物品を移動させることができない。そのため、正面係止式移動操作装置による物品の移動が完了した後に、底面接触式移動操作装置の搬送ベルトの搬送作用領域として棚前後方向で長い範囲に亘る領域を確保できず、物品に棚前後方向又は棚左右方向で偏荷重が存在していると、底面接触式移動操作装置により物品を載置支持部の載置位置まで的確に移動させることができないおそれがある。
この問題は、収納部が棚前後方向で複数の物品を収納可能な場合には、特に顕著となる。すなわち、棚奥側の物品の移載をするためには、多段フォークの突出量を長くする必要があるが、収納効率を確保するために物品収納棚の物品の上下間隔を大きくできないという制約があると、突入する部分の厚みが制約されるため、多段フォークの段数を多く取ることができず、最上段のフォーク体の長さを長くせざるを得ない。そのため、最上段のフォーク体を引退位置まで引退させても、最上段のフォーク体の長さが長くなる分、正面係止体は載置支持部の棚前後方向で一層後側(出退方向で突出側)の位置までしか移動せず、底面接触式移動操作装置により物品を載置支持部の載置位置まで的確に移動させることができないおそれが大きくなる。
【0005】
本発明は上記実情に鑑みて為されたものであって、その目的は、収納効率を確保しつつ、構成の簡素化を図ることができながら、偏荷重のある物品でも適切に移載することが可能な物品収納設備を提供する点にある。
【課題を解決するための手段】
【0006】
この目的を達成するために、本発明に係る物品収納設備の第1特徴構成は、平面視矩形状の物品を載置支持する収納部が上下左右に並ぶ状態で配設された物品収納棚と、前記物品収納棚の前面側において走行自在で、かつ、前記収納部との間で物品を移載自在な移載手段を昇降自在に備えて構成されたスタッカークレーンとが設けられた物品収納設備において、
前記移載手段が、物品を載置支持する載置支持部と、前記収納部における収納位置と前記載置支持部における載置位置との間で物品を棚前後方向に沿って移動させる移動操作装置とを備えて構成され、前記移動操作装置として、物品の棚前後方向で前側の正面部に設けられた正面側被係止部に係脱自在な正面係止体を棚前後方向に移動自在に備えて、前記正面側被係止部に前記正面係止体を係止させた状態で、前記収納位置と、移載対象の物品における棚前後方向で前側の端部が前記載置支持部に支持され、後側の端部が前記収納部に支持される中継位置との間で、移載対象の物品を移動させる正面係止式移動操作装置と、物品の棚左右方向の両側面部に形成された縦方向に沿うリブに対して各別に係脱自在な左右一対の側面係止体を棚前後方向に移動自在に備えて、前記リブに前記側面係止体を係止させた状態で、前記中継位置と前記載置位置との間で移載対象の物品を移動させる側面係止式移動操作装置とを備えて構成されている点にある。
【0007】
本特徴構成によれば、移載手段が、物品を載置支持する載置支持部と、収納部における収納位置と載置支持部における載置位置との間で物品を移動させる移動操作装置とを備えており、移動操作装置として、物品を収納位置から中継位置に移動させる正面係止式移動操作装置と、物品を中継位置から載置位置に移動させる側面係止式移動操作装置とを備えている。したがって、正面係止式移動操作装置と側面係止式移動操作装置とが中継して、移載対象の物品を収納位置から中継位置を経て載置位置に、或いは、載置位置から中継位置を経て収納位置へと、棚前後方向に移動させることができる。
そして、正面係止式移動操作装置は、正面側被係止部に正面係止体を係止させた状態で収納位置と中継位置との間で移載対象の物品を移動させ、側面係止式移動操作装置は物品の棚左右方向の両側面部に形成された縦方向に沿うリブに対して左右一対の側面係止体を各別に係止させた状態で、中継位置と載置位置との間で移載対象の物品を移動させる。
ここで、正面係止式移動操作装置は、収納部から物品を出庫させるべく収納位置から載置位置まで物品を移動させる場合には、収納位置から中継位置まで物品の正面部に対する係止を利用して物品を移動操作し、また、収納部へ物品を入庫させるべく載置位置から収納位置まで移動させる場合には、中継位置から収納位置まで物品の正面部に対する係止を利用して物品を移動操作する。したがって、収納位置から中継位置へ移動させる場合も、中継位置から収納位置まで移動させる場合も、いずれの場合も、移載対象の物品の底面よりも下方や移載対象の物品の両側方に、物品を移動操作するフォーク等の部材を突入させることなく、正面係止式移動操作装置により物品を収納位置と中継位置との間で移動させることができる。
また、側面係止式移動操作装置は、一対の側面係止体を、移載対象の物品の棚前後方向で前側の端部が載置支持部に支持された物品における前側の端部の両側面のリブに係止させた状態で棚前後方向に移動させることで、中継位置と載置位置との間で物品を移動操作する。したがって、中継位置から載置位置へ移動させる場合も、載置位置から中継位置まで移動させる場合も、いずれの場合も、移載対象の物品の底面よりも下方や移載対象の物品の両側方に、物品を移動操作するフォーク等の部材を突入させることなく、側面係止式移動操作装置により物品を中継位置と載置位置との間で移動させることができる。
つまり、収納部から物品を出庫させるべく収納位置から載置位置まで物品を移動させる場合も、収納部へ物品を入庫させるべく載置位置から収納位置まで物品を移動させる場合も、移載対象の物品の底面よりも下方や移載対象の物品の両側方に物品を移動操作するフォーク等の部材を突入させることなく、正面係止式移動操作装置及び側面係止式移動操作装置により物品を移動操作できるので、物品の上下左右の間隔を極力小さくして物品収納棚の収納効率を確保できる。
【0008】
しかも、正面係止式移動操作装置は、収納部から物品を出庫させるべく収納位置から載置位置まで物品を移動させる場合においては、収納位置から中継位置まで物品を移動させればよく、また、収納部へ物品を入庫させるべく載置位置から収納位置まで物品を移動させる場合においては、中継位置から収納位置まで物品を移動させればよい。そのため、例えば、正面係止式移動操作装置を多段フォークに構成した場合、正面係止体を、最上段のフォーク体の上部において移動自在に設けるといったように、正面係止体を棚前後方向で正面係止式移動操作装置の装置内方側まで大きく移動させるための複雑な構成は必要なく、先の例で言えば、多段フォークのフォーク体の突出側の端部に正面係止体を固定状態で設けるだけで済むため、正面係止式移動操作装置の構成の簡素化を図ることができる。
【0009】
さらに、側面係止式移動操作装置は、一対の側面係止体を、移載対象の物品の棚前後方向で前側の端部が載置支持部に支持された物品における前側の端部の両側面のリブに係止させた状態で棚前後方向に移動させるので、移載対象の物品に偏荷重があっても、一対の側面係止体は縦方向に沿うリブに対して係止しているので、一対の側面係止体によりリブを介して物品に対して確実に搬送力を伝達することができる。そのため、側面係止式移動操作装置を物品の左右両側面部に各別に当接した状態で回動自在な一対の搬送ベルトを備えたベルト式移動操作装置にて構成した場合のように、棚左右方向で偏荷重があった場合に、一対の搬送ベルトのいずれか一方において、物品の側面部との間で滑りが発生することで、物品に対してバランスよく搬送力を伝達することができないとか、棚前後方向で偏荷重があった場合に、一対の搬送ベルトの双方において、物品の側面部との間で滑りが発生することで、物品に対して適切に搬送力を伝達することができないとかいう事態が発生することはない。したがって、偏荷重のある物品でも適切に物品を移載することができる。
ちなみに、本特徴構成では、側面係止体を上下方向に長く形成することで縦方向に沿うリブとの上下の係合量を大きく取ることができるため、物品が傾斜した場合でも、側面係止体とリブとの係合が外れることを極力回避できるが、本特徴構成のように構成せずに、係止体が物品の底面に形成された凹入部等に係脱自在な底面係止式移動操作装置を構成した場合、一般に物品の底面に形成される凹入部等の深さは物品の側面に形成された縦方向に沿うリブの長さに比べて短い(浅い)ため、係止体を物品の底面に対して上下方向に深く係入させることができず、物品が傾斜した場合に、係止体と物品の底面における凹入部等との係合が維持できないおそれがあり、好ましくない。
【0010】
このように、本特徴構成によると、収納効率を確保しつつ、構成の簡素化を図ることができながら、偏荷重のある物品でも適切に移載することが可能な物品収納設備を得るに至った。
【0011】
本発明に係る物品収納設備の第2特徴構成は、前記左右一対の側面係止体の夫々は、水平面に沿う巻回経路を形成する状態で物品の棚左右方向の長さよりも長い間隔を隔てて棚左右方向に分散配置された一対の無端回動帯の夫々に、前記巻回経路の外側に突出する状態で設けられて、前記一対の無端回動帯を回動させることにより、前記リブに対して係脱自在でかつ棚前後方向に移動自在に構成され、前記側面係止式移動操作装置は、前記一対の無端回動帯の夫々における物品存在側となる経路部分を棚前後方向に案内するガイド部材を備えて構成されている点にある。
【0012】
本特徴構成によれば、左右一対の側面係止体の夫々を、一対の無端回動帯の夫々に、巻回経路の外側に突出する状態で設けてあるので、一対の無端回動帯を水平面に沿う巻回経路に沿って巻回作動させることで、左右一対の側面係止体の夫々を水平面に沿って移動させ、リブに対して係止させて棚前後方向に移動させその後リブから離脱させることができる。
ガイド部材により一対の無端回動帯の夫々における物品存在側となる経路部分が案内されるため、側面係止体をリブに対して係止させた状態で物品を棚前後方向で移動させる場合に、側面係止体が取り付けられている無端回動帯が棚前後方向に案内されることになる。したがって、側面係止式移動操作装置にて移動操作されている物品からの反作用により側面係止体が取り付けられている無端回動体が屈曲するなどして、側面係止体がリブから離脱する事態を防止できる。このようにして、側面係止式移動操作装置にて物品を棚前後方向に移動させる場合に、無端回動体の側面係止体が連結されている部分の前後で屈曲が生じて側面係止体が物品の縦方向に沿うリブから外れてしまう事態を防止して、物品を側面係止式移動操作装置にて適切に移動操作できる。
【0013】
本発明に係る物品収納設備の第3特徴構成は、前記物品収納棚が、前記収納部の物品出し入れ用間口が互いに対向する姿勢で前記スタッカークレーンの移動用通路を形成するべく棚前後方向に間隔を隔てた状態で一対設けられ、前記移動操作装置が、前記一対の物品収納棚の夫々における前記収納部における収納位置と前記載置支持部における載置位置との間で物品を棚前後方向に沿って移動自在に構成され、前記リブとして、前記収納部から物品を取り出す場合に前記側面係止体と係合する取り出し用のリブと、これに棚前後方向で近接して前記収納部へ物品を受け渡す場合に前記側面係止体と係合する受け渡し用のリブとを一組として、物品の両側面における棚前後方向の両端部の夫々に設けられ、前記左右一対の側面係止体として、物品の両側面における前記一組のリブの棚前後方向の間隔と略同じ距離だけ各無端回動帯の経路方向で間隔を隔てた状態で二対設けられ、前記二対の側面係止体のそれぞれは、物品が前記載置支持部における前記載置位置に位置しているときに、棚前後方向で前記一組のリブの間に位置するように配置されている
点にある。
【0014】
本特徴構成によれば、一方の物品収納棚における収納部から物品を取り出す場合は、物品の両側面における棚前後方向で一方側に設けられた一組のリブのうちの取り出し用のリブに一対の側面係止体を係止させて物品を移動操作することができ、同一方の物品収納棚における収納部に物品を受け渡す場合は、物品の両側面における棚前後方向で一方側に設けられた一組のリブのうちの受け渡し用のリブに一対の側面係止体を係止させて物品を移動操作することができる。
同様に、他方の物品収納棚における収納部から物品を取り出す場合は、物品の両側面における棚前後方向で他方側に設けられた一組のリブのうちの取り出し用のリブに一対の側面係止体を係止させて物品を移動操作することができ、同他方の物品収納棚における収納部に物品を受け渡す場合は、物品の両側面における棚前後方向で他方側に設けられた一組のリブのうちの受け渡し用のリブに一対の側面係止体を係止させて物品を移動操作することができる。
このように、一対の物品収納棚のそれぞれにおける収納部との間で物品を移載できる。
そして、一対の物品収納棚における収納部から物品を取り出して、物品が載置支持部における載置位置に位置しているときには、二対の側面係止体のそれぞれが、棚前後方向で一組のリブの間に位置することになるので、無端回動体の巻回作動方向を選択することで、棚前後方向で前後何れに対しても、側面係止式移動操作装置にてそのまま移動操作できる。つまり、直前の受取動作を収納部が位置する側とは反対側の方向に移載する場合でも、側面係止体を物品の次の移載方向で後方側の端部に移動させなくても済むので、物品の移載を効率よく行うことができる。
【0015】
本発明に係る物品収納設備の第4特徴構成は、前記収納部に収納されている物品が前記収納部の物品出し入れ用間口から突出することを規制する上向き姿勢の規制用突部が、前記収納部の物品載置支持面の棚前後方向で手前側の端部に設けられ、前記スタッカークレーンの作動を制御する制御手段が、前記規制用突部の上端部よりも高い位置に前記載置支持部の載置支持面を位置させた状態で前記側面係止式移動操作装置により前記中継位置から前記載置位置に物品を移動させるべく、前記スタッカークレーンの作動を制御するように構成され、
前記載置支持部の載置支持面に弾性部材が設けられている点にある。
【0016】
本特徴構成によれば、規制用突部の上端部よりも高い位置に前記載置支持部の載置支持面を位置させた状態で前記側面係止式移動操作装置により前記中継位置から前記載置位置に物品を移動させるため、物品の棚前後方向での奥側の下端が収納部に載置支持され、物品の底面における棚前後方向で奥側端部よりも手前側箇所が載置支持部に支持された傾斜姿勢となる。そして、物品が側面係止式搬送装置にて載置位置へ向けて移動操作される途中で、当該物品は傾斜姿勢から載置支持部に載置支持された水平方向に沿う姿勢に急激に変化することになる。物品の急激な姿勢変化により、物品の底面が載置支持部の載置支持面に衝突するが、載置支持部における載置支持面に弾性部材が設けられているので、物品が載置支持面に対して衝突するときの衝撃が緩和されるとともに、衝撃音の発生も抑制される。
【0017】
本発明に係る物品収納設備の第5特徴構成は、前記載置支持部が、複数の遊転自在なローラを棚前後方向に並ぶ状態で備えたローラコンベヤにて構成され、前記弾性部材が、前記複数のローラの夫々の外周面に巻回されている点にある。
【0018】
本特徴構成によれば、載置支持部における載置支持面に弾性部材を設けることで、物品の底面との摩擦が増加することになるが、載置支持部を移載対象の物品が棚前後方向に移動されるときに物品の底面を摺動自在に支持する載置支持台にて構成すると、側面係止式移動操作装置にて物品を中継位置と載置位置との間で移動操作する際に、搬送抵抗が大きくなり、物品を適切に移動操作できないおそれがあるため好ましくない。
この点、載置支持部をローラコンベヤにて構成して、複数のローラの夫々の外周面に巻回する形態で、載置支持部の載置支持面に弾性部材を設けることで、ローラが回転することにより物品を側面係止式搬送手段にて円滑に搬送することができながら、物品が傾斜姿勢から水平方向に沿う姿勢に急激に変化して載置支持面に対して衝突するときの衝撃が緩和されるとともに、衝撃音の発生も抑制される。
なお、物品の底面とローラコンベヤとの衝突は、物品に棚前後方向で後側に荷重が偏った編荷重が存在している場合には、載置位置までの移載が完了する直前まで棚前後方向で傾斜した姿勢が続くため、衝突現象が顕著となる。
【0019】
本発明に係る物品収納設備の第6特徴構成は、前記正面係止式移動操作装置が、物品を載置支持自在に構成され、かつ、その載置支持面が前記載置支持部の載置支持面よりも低くなる下降高さと、その載置支持面が前記載置支持部の載置支持面よりも高くなる上昇高さとに昇降自在に設けられ、かつ、昇降作動により移載対象の物品の前記正面側被係止部に対して前記正面係止体を係脱自在に構成され、前記制御手段は、物品を前記収納位置から前記載置位置まで物品を移動させる場合は、前記正面係止式移動操作装置により移動される物品が前記中継位置に位置すると、前記正面係止体を前記正面側被係止部から離脱させるべく前記正面係止式移動操作装置を下降高さに下降させる離脱用下降処理を実行し、その後、前記側面係止式移動操作装置により移動される物品が前記載置位置から設定距離だけ手前の停止準備位置に位置すると、移載対象の物品を前記正面係止式移動操作装置の載置支持面にて載置支持するべく前記正面係止式移動操作装置を前記上昇高さに上昇させる載置支持用上昇処理を実行するように構成されている点にある。
【0020】
本特徴構成によれば、物品を収納位置から載置位置まで物品を移動させる場合に、正面係止式移動操作装置が載置支持部に対して下降作動することにより移載対象の物品の正面側被係止部に対して正面係止体を離脱できる。したがって、移載対象の物品の底面における棚前後方向で奥側端部よりも手前側の箇所が載置支持部に支持されかつ移載対象の物品の棚前後方向で奥側の下端部が収納部に支持される中継位置において、正面係止体を物品の正面側被係止部に対して係脱させる際には、収納部に対する載置支持部の高さを変化させることなく、つまり、スタッカークレーンを上下に昇降させることなく、正面係止式移動操作装置を載置支持部に対して昇降させれば済む。これにより、中継位置において、ローラコンベヤにて構成された載置支持部に底面が支持された状態となっている物品の姿勢を変化させることなく正面係止体を正面側被係止体から離脱させることができる。そのため、載置支持部をローラコンベアにて構成していても、正面係止体を正面側被係止体から離脱させる際に物品が移動してしまうことを極力抑制することができる。
【0021】
また、側面係止式移動操作装置による物品の移動が完了する手前で、正面係止式移動操作装置を上昇高さに上昇させることで、正面係止式移動操作装置の載置支持面が載置支持部の載置支持面よりも高くなり、正面係止式移動操作装置の載置支持面で物品が支持される。そのため、正面係止式移動操作装置の載置支持面との間で適度な摩擦力を得た状態で、側面係止体を停止させることができ、物品を停止させた位置に適切に保持することができる。したがって、載置支持部のローラコンベヤに載置支持された状態のまま側面係止体を停止させると、ローラコンベヤ上で物品が安定しないという不都合を解消できる。
【0022】
本発明に係る物品収納設備の第7特徴構成は、前記収納部が、棚前後方向に複数個の物品を収納可能に構成され、前記正面係止式移動操作装置が、棚前後方向に長尺のフォーク体を棚前後方向に出退自在に備えた多段フォークを備えて構成され、前記正面係止体が、前記フォーク体の上下厚みの範囲内に納まる状態で突出側の先端部に設けられている点にある。
【0023】
本特徴構成によれば、多段フォークにより、長尺のフォーク体を棚前後方向に出退させることで、フォーク体の突出側の先端部に取り付けられている正面係止体を棚前後方向に移動させて物品を移動操作することができる。正面係止体は、フォーク体の上下厚みの範囲内に納まっているため、フォーク体を物品収納棚の棚前後方向で棚内方側に突入させる場合に、物品収納棚において上下に隣接する物品のクリアランスが小さくても、正面係止体が移載対象外の物品の上下に位置する物品に干渉する不都合が生じ難い。そのため、収納部の上下ピッチを極力小さくすることができ、収納効率の高い物品収納設備となる。
【図面の簡単な説明】
【0024】
【図1】物品収納設備の一部正面図
【図2】物品収納設備の一部平面図
【図3】昇降台の正面図
【図4】昇降台の平面図
【図5】コンテナを取り出すときの移載装置の平面図その1
【図6】コンテナを取り出すときの移載装置の平面図その2
【図7】コンテナを取り出すときの移載装置の平面図その3
【図8】コンテナを取り出すときの移載装置の平面図その4
【図9】コンテナを取り出すときの側面係止式移動操作装置及び傾斜規制手段の作用図
【図10】コンテナを取り出すときの側面係止式移動操作装置の作用図
【図11】載置支持部及び位置変更操作手段を示す縦断側面図
【図12】側面係止式移動操作装置の説明図
【図13】制御ブロック図
【図14】取出用正面係止式移動操作処理のフローチャート
【図15】取出用側面係止式移動操作処理のフローチャート
【図16】受渡用側面係止式移動操作処理のフローチャート
【図17】受渡用正面係止式移動操作処理のフローチャート
【図18】(a)コンテナを取り出すときの正面係止体及び傾斜規制アームの位置の変化を示す図(b)コンテナを取り出すときの傾斜規制アームの位置変化を示す図
【図19】(a)コンテナを受け渡すときの正面係止体及び傾斜規制アームの位置の変化を示す図(b)コンテナを受け渡すときの傾斜規制アームの位置変化を示す図
【図20】奥棚のコンテナを取り出す場合において正面係止体を係合させるために多段フォークを上昇させるときの出退位置を示す図
【図21】コンテナを取り出す場合においてコンテナを持ち上げ状態にするために多段フォークを上昇させるときの出退位置を示す図
【図22】コンテナを取り出すときの移載装置の作動状態を示す図その1
【図23】コンテナを取り出すときの移載装置の作動状態を示す図その2
【図24】コンテナを取り出すときの移載装置の作動状態を示す図その3
【発明を実施するための形態】
【0025】
本発明に係る物品収納設備の実施形態を図面に基づいて説明する。
この物品収納設備LSは平面視矩形状の物品の一例としてコンテナCを収納保管する設備であり、図1に示すように、コンテナCを搬送するスタッカークレーン1が、走行レール2に沿って移動可能に構成され、このスタッカークレーン1の移動用通路4を挟んでその両側には物品収納棚5として、第1物品収納棚5aと第2物品収納棚5bとが設置されている。
【0026】
〔物品収納棚〕
物品収納棚5は、図1及び図2に示すように、上下方向に立設された複数本の柱部材6や水平方向に配設の複数本の棚部材7などから構成され、収納部8を上下方向及び横方向に複数並べた構造となっている。このように、物品収納棚5が、収納部8の物品出し入れ用間口が互いに対向する姿勢でスタッカークレーン1の移動用通路4を形成するべく棚前後方向に間隔を隔てた状態で一対設けられている。
【0027】
各収納部8は、図2、図3、図5〜図8及び図11に示すように、柱部材6にコンテナCを載置支持する左右一対の棚部材7が取付けられて構成され、その奥行き方向(棚前後方向)に2個のコンテナCを収納することができる。尚、以下において、収納部8における奥行き方向の2個の収納位置のうち、便宜上、手前側の位置を「手前棚」、奥側の位置を「奥棚」という場合がある。
【0028】
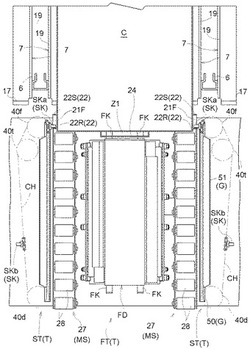
前記左右一対の棚部材7の夫々は、棚前後方向の前端部及び後端部に、載置支持面から上向きに突出する姿勢に折り曲げ形成された前端ストッパ17及び後端ストッパ18が設けられ、棚左右方向の収納部の外方側の側端部の棚前後方向で略全体に亘って、載置支持面から上向きに突出する姿勢に折り曲げ形成された側端ストッパ19が設けられている。したがって、各収納部8は、収納されているコンテナCが収納部8の物品出し入れ用間口から突出することを規制する上向き姿勢の規制用突部としての前端ストッパ17が、収納部8の物品載置支持面の棚前後方向で手前側の端部に、間隔を隔てて左右一対設けられている。
【0029】
〔コンテナ〕
図1に示すように、コンテナCは、内側に書籍等の収容物Wを収容可能な上部開放状態の浅い箱状体として形成され、図3、図7、図8及び図10に示すように、収納部8の収納位置に収納された状態で棚前後方向に平行となる両側面における前端部及び後端部には、側面係止式移動操作装置STが備える左右一対の側面係止体SKが係脱自在な左右一対の前側凹部21Fと左右一対の後側凹部21Rが形成されている。なお、前側凹部21F及び後側凹部21Rの名称に関しては、第1物品収納棚5aの前後に対応して定義している。
【0030】
図11にも示すように、前後の凹部21F・21Rの夫々は、一組の縦方向に沿うリブ22(22S・22R)と一組の横方向に沿うリブ23とで矩形状の外周部が形成されている。収納部8からコンテナCを取り出す場合に側面係止式移動操作装置STによりコンテナCを移動操作するときには、一組の縦方向に沿うリブ22のうち棚前後方向で外方側の取り出し用のリブ22Rに側面係止体SKが係止され、収納部8にコンテナCを受け渡す場合に側面係止式移動操作装置STによりコンテナCを移動操作するときには、一組の縦方向に沿うリブ22のうち棚前後方向で内方側の受け渡し用のリブ22Rに側面係止体SKが係止される。
【0031】
コンテナCを第1物品収納棚5aの収納部8から取り出すときは、前側凹部21Fの棚前後方向でコンテナCの外方側に位置する縦方向に沿う取り出し用のリブ22Rに後述の第1側面係止体SKaが係止される(図7及び図8参照)。一方、コンテナCを第1物品収納棚5aの収納部8へ受け渡すときは、前側凹部21Fの棚前後方向でコンテナCの内方側に位置する縦方向に沿う受け渡し用のリブ22Sに第1側面係止体SKaが係止される。つまり、第1物品収納棚5aに対する移載では、前側凹部21Fに第1側面係止体SKaが係入し、第1側面係止体SKaは一組のリブ22のうち、移載種別に応じて、前側凹部21Fを形成する取り出し用のリブ22Rや受け渡し用のリブ22Sに係止される。
【0032】
コンテナCを第2物品収納棚5bの収納部8から取り出すときは、後側凹部21Rの棚前後方向でコンテナCの外方側に位置する縦方向に沿う取り出し用のリブ22Rに後述の第2側面係止体SKbが係止される。一方、コンテナCを第2物品収納棚5bの収納部8へ受け渡すときは、後側凹部21Rの棚前後方向でコンテナCの内方側に位置する縦方向に沿う受け渡し用のリブ22Sに第2側面係止体SKbが係止される。つまり、第2物品収納棚5bに対する移載では、後側凹部21Rに第2側面係止体SKbが係入し、第2側面係止体SKbは一組のリブ22のうち、移載方向に応じて、後側凹部21Rを形成する取り出し用のリブ22Rや受け渡し用のリブ22Sに係止される。
【0033】
このように、コンテナCには、側面係止体SKが係脱自在なリブ22として、収納部8からコンテナCを取り出す場合に側面係止体SKと係合する取り出し用のリブ22Rと、これに棚前後方向で近接して配置され収納部8へコンテナCを受け渡す場合に側面係止体SKと係合する受け渡し用のリブ22Sとを一組として、コンテナCの両側面における棚前後方向の両端部の夫々に設けられている。
【0034】
図10に示すように、凹部21F・21Rの上下長さは、側面係止体SKの上下長さよりも長く形成され、凹部21F・21Rの棚前後方向の長さは、側面係止体SKの棚前後方向の長さよりも長く形成されている。なお、凹部21F・21Rの棚左右方向の深さ、つまり、リブ22・23の高さは、側面係止体SKの係入深さよりも大きくなっている。
【0035】
そして、詳しくは後述するが、側面係止体SKが、縦向きのリブ22に係止した状態で側面係止式移動操作装置STにより棚前後方向に移動操作されることで、コンテナCが移動操作される。
【0036】
図3、図9、図10及び図11に示すように、コンテナCは、互いに対向配置されて収納部8の収納位置に収納された状態で棚左右方向に平行となる前後の正面部(コンテナCの短辺側の端面部)は、棚前後方向視で、台形状の上側部分Cuと長方形状の下側部分Cdとからなる。
【0037】
コンテナCの上下中間位置には、上側部分Cuと下側部分Cdとの境界となる横向きのリブ25がコンテナ左右幅全体に亘って形成されている。このリブ25が傾斜規制手段LKにて規制作用を受ける被規制部として機能する。すなわち、移載中にコンテナCを持ち上げ状態にした場合に、棚左右方向の偏荷重のために傾斜しようとした場合に、リブ25の水平方向に沿う上面部が、作用位置となっている傾斜規制アーム57の先端部に下方から当接することで、持ち上げ状態のコンテナCの傾斜は、移載が継続可能な角度に規制されるようになっている。
【0038】
上側部分Cuには、作業者がコンテナCを取り扱う場合に把持される取っ手26が形成されている。また、図示は省略するが、コンテナCの正面部に形成された横向きのリブ25の上面には、各コンテナCを識別するためのバーコードラベルが貼付されている。
【0039】
図3、図9、図10及び図11に示すように、正面部における下側部分Cdにおける棚左右方向で中央箇所に、正面係止式移動操作装置FTが備える一対の正面係止体FKが係脱する正面側被係止部24が形成されている。正面側被係止部24は、コンテナCの内壁と平行に配置され、これらの間に位置する左右2枚の縦向きのリブと上側1枚の横向きのリブとで、内壁の外面に沿った偏平形状の開口を下部に備えた袋状の係入空間Z1を形成している。コンテナCの内壁の外面の、係入空間Z1の下方側部分は、一対の正面係止体FKが棚前後方向で奥側に押し当てられる被押当部分Z2となっている。
【0040】
そして、詳しくは後述するが、正面係止式移動操作装置FTが、正面側被係止部24を棚前後方向で奥側に移動させてコンテナCの正面部における被押当部分Z2に押し当ててから上昇させることで、正面側被係止部24を係入空間Z1に係入させ、その状態で正面側被係止部24を棚前後方向で移動させることで、コンテナCを移動操作する。
【0041】
このコンテナCでは、上述のように、左右一対の側面係止体SKが係脱する左右一対の凹部として、前側凹部21Fと後側凹部21Rとの双方を備え、一対の正面係止体FKが係脱する正面側被係止部24を、前後に対向する正面部のいずれにも備えている。つまり、コンテナCは、側面側被係止部や正面側被係止部を左右及び前後に対称に備えていることにより、第1物品収納棚5a及び第2物品収納棚5bとの間で、また、収納部8の奥側及び手前側との間で、コンテナCの前後関係が入れ替ってもそのままスタッカークレーン1によるコンテナCの取り扱いが可能となっている。なお、コンテナCの側面側被係止部や正面側被係止部としては、前側凹部21F及び後側凹部21R並びに正面側被係止部24の構成に限らず、左右一対の側面係止体SKや正面係止体FKが係止可能となる他の形状、例えば、コンテナCが各格納部8に収納できる範囲内でコンテナC本体部分から外方へ突出させたものとしてもかまわない。
【0042】
〔スタッカークレーン〕
スタッカークレーン1は、物品収納棚5に対する物品搬出入部(図示せず)と各物品収納棚5の収納部8との間でコンテナCを搬送するもので、そのため、移動用通路4に沿って走行自在な走行台車3と、上下方向に沿って昇降自在な昇降台13とを備え、且つ、この昇降台13には移載手段としての移載装置CTを備えている。
【0043】
なお、物品搬出入部は、一方の物品収納棚5の端部外方箇所に設けられた搬入部コンベヤと他方の物品収納棚5の棚左右方向の端部よりも外方側の箇所に設けられた搬出部コンベヤとが独立して備えられている。
【0044】
走行台車3は、走行モータM1により回転駆動される駆動輪11aと、遊転自在な従動輪11bとを走行方向で前後の端部に備え、棚前面側で走行レール2上を移動用通路4に沿って走行する。
【0045】
走行台車3の前後端部には、前後一対の昇降マスト10が立設されており、上端部が上部フレーム14にて連結され、この上部フレーム14が備える縦軸心の複数の上部ガイドローラ12uが上部レール15の両側面に当接する状態で、上部フレーム14が上部レール15に走行方向に移動自在に係合している。前後一対の昇降マスト10の対向する側面部の夫々には、上下方向に沿って左右一対の昇降台案内用の凹溝が形成されている。
【0046】
昇降台13は、昇降マスト10の各側面部に当接する前後位置案内用のガイドローラ12aと昇降マスト10の各側面部に形成された前記一対の案内用凹溝に係入する左右位置案内用の一対のガイドローラ12bを異なる高さに上下一組ずつ備えている。そして、昇降台13は、一対の昇降ワイヤ16により吊り下げ支持されており、昇降モータM2により一対の昇降ワイヤ16を図外の巻取ドラムにて巻取り及び繰り出すことで、前後一対の昇降マスト10に案内されながら昇降駆動される。
【0047】
このように、物品収納設備LSは平面視矩形状の物品としてのコンテナCを載置支持する収納部8が上下左右に並ぶ状態で配設された物品収納棚5と、物品収納棚5の前面側において走行自在で、かつ、収納部8との間でコンテナCを移載自在な移載手段としての移載装置CTを昇降自在に備えて構成されたスタッカークレーン1とが設けられた物品収納設備となっている。
【0048】
〔移載装置〕
移載装置CTは、図2及び図3に示すように、コンテナCを載置支持する載置支持部MSと、突出側の先端部に正面係止体FKを固定状態で備えた多段フォークFDにて構成された正面係止式移動操作装置FTと、棚横幅方向で左右一対(スタッカークレーン1の走行方向で前後一対)の側面係止体SKを備えた側面係止式移動操作装置STとを備えて構成されている。
【0049】
正面係止式移動操作装置FTと、側面係止式移動操作装置STとは協働して、移載装置CTにおいて載置支持部MSがコンテナCを載置支持する載置位置と、それの外方側に位置する外方位置、すなわち移動用通路4の両側の収納部8における棚前後方向に隣接する2つの収納位置、並びに、搬入部コンベヤにおける搬送終端部及び搬出部コンベヤにおける搬送始端部との間でコンテナCを移載する。つまり、移載装置CTは、収納部8における収納位置と載置支持部MSにおける載置位置との間でコンテナCを移動させる移動操作装置Tとして、正面係止式移動操作装置FTと、側面係止式移動操作装置STとを備えている。移動操作装置Tは、収納部8における前端ストッパ17の上端部よりも高い位置に載置支持部MSの載置支持面を位置させた状態で、コンテナCを棚前後方向に移動操作する。
【0050】
〔載置支持部〕
載置支持部MSは、図3〜図7及び図10に示すように、正面係止式移動操作装置FTの棚左右方向で両側に分散配置された左右一対のローラコンベヤ27にて構成されている。ローラコンベヤ27は、複数のローラ28を棚前後方向に並ぶ状態でコンベヤフレーム29に横軸心周りに遊転自在に軸支させて構成されたフリーローラ式のコンベヤとなっている。コンベヤフレーム29は昇降台13に固定状態で取り付けられている。
【0051】
図11に示すように、ローラコンベヤ27における各ローラ28の外周面には、弾性部材としてのウレタンゴムシート30が巻回されている。ウレタンゴムシート30は、ローラ28の回転軸心方向の略全体に亘る長さの筒状体にて形成されている。これにより、移載対象のコンテナCを収納部8から取り出す場合に、コンテナCの底面が載置支持部MSの上端部に衝突する際の衝撃を緩和し、その衝突による騒音を抑制している。
【0052】
移載装置CTは、移載対象の収納部8について設定された移載用位置に位置した状態(前端ストッパ17の上端部よりも設定量だけ高い位置に載置支持部MSの載置支持面を位置させた状態)で、コンテナCを移載する。収納部8からコンテナCを取り出す場合においてコンテナCが中継位置(図21及び図23(f)に示す位置)から載置位置(図24(i)に示す位置)まで移動操作される間(図22〜図24において(f)〜(i)に示す期間)は、コンテナCの底面部は載置支持部MSにて支持されることになるが、コンテナCの底面とローラコンベヤ27との衝突は、コンテナCの棚前後方向で後側がローラコンベヤ27の端部に支持された状態で側面係止式移動操作装置STにて棚前後方向で前側に移動操作されているときに、コンテナCの棚前後方向で前側部分がローラコンベヤ27の載置支持面から浮上にした姿勢(図24(g)に示す姿勢)から、水平方向に沿う姿勢(図24(h)に示す姿勢)に急激に変化するときに発生する。コンテナCに収容されている収容物Wのために棚前後方向で後側に荷重が偏っている場合には、載置位置までの移載が完了する直前まで棚前後方向で傾斜した姿勢が維持され易いため、衝突現象が顕著となる。
【0053】
図10及び図12(b)に示すように、コンテナCの左右両側面の下端部を棚前後方向に案内する下部案内体37が昇降台13に固定状態で一対設けられている。下部案内体37は、板状部材を折り曲げ加工した屈曲断面形状の長尺部材にて構成され、ローラコンベヤ27のフレームに棚前後方向の複数箇所でネジ止めされている。下部案内体37の棚前後方向の両端部には、縦軸心周りに遊転自在なガイドローラ38が配設されている。これにより、移動操作装置TにてコンテナCが棚前後方向に移動操作される際に、棚横幅方向の位置が案内されるので、特に、側面係止式移動操作装置STにてコンテナCを移動操作する場合に、左右一対の側面係止体SKがコンテナCの左右の凹部から離脱することを防止できる。
【0054】
〔正面係止式移動操作装置〕
正面係止式移動操作装置FTは、図3〜図7に示すように、棚前後方向に長尺のフォーク体としての第4フォーク34を棚前後方向に出退自在に備えた多段フォークFDを備えて構成されている。多段フォークFDは、昇降台13に固定状態で取り付けられた第1フォーク31と、第1フォーク31に対して棚前後方向にスライド移動自在に取り付けられた第2フォーク32と、第2フォーク32に対して棚前後方向にスライド移動自在に取り付けられた第3フォーク33と、第3フォーク33に対して棚前後方向にスライド移動自在に取り付けられた第4フォーク34とが備えられ、第4フォーク34の突出側の先端に、一対の正面係止体FKが棚左右方向に間隔を開けて固定状態で取り付けられている。
【0055】
第1フォーク31、第2フォーク32、第3フォーク33及び第4フォーク34はいわゆるスライドフォーク機構を構成しており、図3等では図示を省略するが、サーボモータにて構成されたフォーク出退モータM3(図13参照)によって第1フォーク31に対して第2フォーク32をスライド駆動することで、図示しない連係機構によって第4フォーク34が突出並びに引退作動する。
【0056】
図3に示すように、第2フォーク32の下面には、棚前後方向で異なる位置に一対のドグ板35が垂設されており、第1フォーク31の上面には、一対のドグ板35に対応して一対の引退位置検出センサ36が設けられている。そして、後述するクレーンコントローラH(図13参照)が、一対の引退位置検出センサ36の検出情報の組み合わせから多段フォークFDが引退位置であることが判別できるようになっている。
【0057】
このように、正面係止式移動操作装置FTは、コンテナCの棚前後方向で前側の正面部に設けられた正面側被係止部24に係脱自在な正面係止体FKを棚前後方向に移動自在に備えて、正面側被係止部24に正面係止体FKを係止させた状態で、収納位置と、移載対象のコンテナCにおける棚前後方向で前側の端部が載置支持部MSに支持され、後側の端部が収納部8に支持される中継位置との間で、移載対象のコンテナCを移動させることができるようになっている。
【0058】
また、多段フォークFDは、載置支持部MSに対して昇降自在に支持されている。これにより、正面係止体FKが昇降自在となっている。多段フォークFDの支持構造の詳細は図示を省略するが、多段フォークFDは、棚前後方向の前後2箇所において、第1フォーク31の底面と昇降台13との間に配置されて多段フォークFDを上下方向に沿って昇降案内する前後一対の直動案内機構により昇降自在に支持されている。前後一対の直動案内機構の棚前後方向で中間には、ラックアンドピニオンにて構成された昇降操作手段UDが配置されており、ピニオンギヤを回転駆動するサーボモータにて構成されたフォーク昇降モータM4が昇降台13に取り付けられている。
【0059】
このような構成により、フォーク昇降モータM4を正逆に回転作動させることにより、正面係止体FKを備えた多段フォークFDとフォーク出退モータM3とが一体的に昇降駆動される。したがって、正面係止体FKは昇降自在に設けられており、正面係止体FKを載置支持部MSに対して昇降操作する昇降操作手段UDが設けられている。
そして、正面係止式移動操作装置FTは、コンテナCを載置支持自在に構成され、その載置支持面が載置支持部MSの載置支持面よりも低くなる下降高さ(後述する下降高さH0)と、その載置支持面が載置支持部MSの載置支持面よりも高くなる上昇高さ(後述する第1上昇高さH1〜第4上昇高さH)とに昇降自在に設けられ、かつ、正面係止式移動操作装置FTが載置支持部MSに対して昇降することにより移載対象のコンテナCの正面側被係止部24に対して正面係止体FKを係脱できるようになっている。
【0060】
正面係止式移動操作装置FTは、後述するクレーンコントローラHにてフォーク昇降モータM4の駆動が制御されることで、収納位置に位置するコンテナC及び中継位置に位置するコンテナCにおける正面側被係止部24に対して、正面係止体FKを係脱自在に構成されている。
【0061】
一対の正面係止体FKの夫々は、板状部材を折り曲げ形成して構成されており、棚前後方向で後側(突出方向で突出側)に位置する立ち上がり部の高さは、正面係止体FKが第4フォーク34の上下厚みの範囲内に納まるような高さとなっている。したがって、正面係止体FKは、第4フォーク34の上下厚みの範囲内に納まる状態で突出側の先端部に設けられている。そのため、第4フォーク34の上面が、正面係止式移動操作装置FTの載置支持面となっており、正面係止式移動操作装置FTが上記下降高さH0に位置すると、第4フォーク34の載置支持面が載置支持部MSの載置支持面よりも低くなる。
【0062】
第4フォーク34の棚前後方向で反対側の先端部にも同様に一対の正面係止体FKが固定状態で取り付けられており、正面係止式移動操作装置FTは、フォーク出退モータM3の回転方向を切り換えることで、多段フォークFDの突出方向を切換自在に構成されているため、第1物品収納棚5a及び第2物品収納棚5bのいずれの物品収納棚5における収納部8に対しても、正面係止体FKを棚前後方向に移動させることができる。
【0063】
一対の正面係止体FKの設置間隔は、図5〜図7及び図9に示すように、コンテナCの正面部に形成された係入空間Z1に双方の正面係止体FKが係入できるように設定されている。そして、図9において仮想線で示すように、移載中に収容物Wの偏荷重によりコンテナCが傾斜した場合でも、後述する傾斜規制アーム57により傾斜が規制されて、一対の正面係止体FKの双方の立ち上がり部の先端が係入空間Z1に係入した状態が維持されることで、コンテナCが傾斜しても移載が継続可能となっている。
【0064】
〔側面係止式移動操作装置〕
側面係止式移動操作装置STは、図7、図8及び図10に示すように、コンテナCの左右両側面に形成された縦向きのリブ22に対して各別に係脱自在な左右一対の側面係止体SKを棚前後方向に移動自在に備えて、リブ22に側面係止体SKを係止させた状態で、中継位置と載置位置との間で移載対象のコンテナCを移動させる。
【0065】
左右一対の側面係止体SKの夫々は、図8〜図10に示すように、水平面に沿う巻回経路を形成する状態でコンテナCの棚左右方向の長さよりも長い間隔を隔てて棚左右方向に分散配置された一対の環状チェーンCHの夫々に、巻回経路の外側に突出する状態で設けられている。説明を加えると、側面係止体SKは、図12(a)〜(c)に示すように、二股に分岐する連結部20を備えており、連結部20の二股の先端に形成された係合孔に環状チェーンCHの隣接ピースのピン54Pが、ブッシュ等を介して回転自在に挿通している。つまり、環状チェーンCHの側面係止体SKが連結された部分には、ローラ55に代えて連結部20が設けられている。
【0066】
なお、環状チェーンCHの側面係止体SKが連結されている部分では、連結部20の二股先端部に挿通するピン54P及びこれらに隣接する一対のピン54の合計4本のピンが、外側プレートよりも下方に延出されており、その延出部分に後述するガイド部材Gを構成する下部ガイド50の細溝49に係合するガイドローラ56が遊転自在に設けられている。
【0067】
環状チェーンCHの夫々は、縦軸心の3つのスプロケット40により巻回案内されて巻回経路が形成されており、その巻回経路の棚前後方向で一方側の端部(第1物品収納棚5a側の端部)に配置された従動スプロケット40fと、他方側の端部(第2物品収納棚5b側の端部)に配置された駆動スプロケット40dとの間には、これらのスプロケット40f・40dとは棚左右方向で異なる位置でかつ棚前後方向で従動スプロケット40fに近い箇所にテンションスプロケット40tが配置されている。
【0068】
テンションスプロケット40tは棚左右方向での位置を変更調節自在に設けられている。すなわち、調整用ボルト39(図3参照)に対する軸心方向での螺合位置を変更することによりテンションスプロケット40tの棚左右方向での位置を変更して、環状チェーンCHの張力を調整できるようになっている。従動スプロケット40fは、図11に示すように、棚前後方向で昇降台13の一方側の端部に配置された支持部材41にて上向きに立設する状態で取り付けられた円筒状の軸部材42の下端部に、遊転自在に軸支されている。
【0069】
一対の環状チェーンCHの夫々についての駆動スプロケット40dは、図11に示すように、棚前後方向で昇降台13の他方側の端部に配置された上下一対の軸受け43にて上下方向に沿う姿勢で回転自在に支持された駆動軸44の上端部に、駆動スプロケット40dのボス部に形成されたキー45が係合することにより、駆動スプロケット40dと駆動軸44とが一体回転自在に取り付けられている。図3、図9及び図10に示すように、駆動軸44の下端部には、ベベルギヤ46が取り付けられており、一対の環状チェーンCHの夫々についての駆動軸44は、左右一対の軸受9により回転自在に支持されてチェーン駆動モータM5により回転駆動されるドライブシャフト47とその両端のベベルギヤ48により連動連結されている。これにより、チェーン駆動モータM5の回転駆動力が一対の環状チェーンCHの夫々についての駆動スプロケット40dに分配入力されるようになっている。
【0070】
そして、一対の環状チェーンCHを、サーボモータにて構成されたチェーン駆動モータM5により正逆に巻回駆動することにより、巻回経路のうちコンテナCの存在側となる直線経路部分では、一対の側面係止体SKを棚前後方向に移動させることができ、巻回経路のうち棚前後方向で端部となる箇所では、一対の側面係止体SKを巻回経路の曲線形状に沿って移動させることができるようになっている。
【0071】
これにより、コンテナCの両側面における前後の凹入部21F・21Rを形成する縦向きのリブ22に対して一対の側面係止体SKを係止させた状態でコンテナCを棚前後方向に移動させることができ、また、前後の凹入部21F・21Rにおける縦向きのリブ22に対して一対の側面係止体SKを係脱させることができるようになっている。
【0072】
側面係止式移動操作装置STは、クレーンコントローラHにてチェーン駆動モータM5の駆動が制御されることで、中継位置にコンテナCが位置している状態においてリブ22に対して側面係止体SKを係脱自在に構成されている。
【0073】
図4及び図8に示すように、一対の環状チェーンCHの夫々には、左右一対の側面係止体SKとして、第1物品収納棚5aに対する移載用の第1側面係止体SKaと第2物品収納棚5bに対する移載用の第2側面係止体SKbが設けられている。第1側面係止体SKaと第2側面係止体SKbとは、コンテナCの左右一対の前側凹部21F及び左右一対の後側凹部21Rにおける縦方向に沿うリブ22の棚前後方向の間隔と略同じ距離だけ各環状チェーンCHの経路方向で間隔を隔てた状態で設けられている。すなわち、左右一対の側面係止体SKとして、コンテナCの左右両側面におけるリブ22の棚前後方向の間隔と略同じ距離だけ各環状チェーンCHの経路方向で間隔を隔てた状態で二対設けられている。そして、図8に示すように、二対の側面係止体SKa・SKbの合計4の側面係止体SKのそれぞれは、コンテナCが載置支持部MSにおける載置位置に位置しているときに、棚前後方向で一組のリブ22(取り出し用のリブ22R及び受け渡し用のリブ22S)の間に位置するように、各環状チェーンCHに取り付けられている。
【0074】
説明を加えると、4つの側面係止体SKの環状チェーンCHの経路方向での設置間隔は、第1物品収納棚5aからコンテナCを取り出すとき(図7及び図8参照)に第1側面係止体SKaが係止される縦方向に沿う取り出し用のリブ22Rと、第2物品収納棚5bからコンテナCを取り出すときに第2側面係止体SKbが係止される縦方向に沿う取り出し用のリブ22Rとの間隔よりも狭く、かつ、第1物品収納棚5aにコンテナCを受け渡すときに第1側面係止体SKaが係止される縦方向に沿う受け渡し用のリブ22Sと、第2物品収納棚5bにコンテナCを受け渡すときに第2側面係止体SKbが係止される縦方向に沿う受け渡し用のリブ22Sとの間隔よりも広く設定されている。
【0075】
このような構成により、コンテナCが移載手段Cにおける載置支持部MSの載置位置に位置する場合には、前後二対の側面係止体SKは、図8に示すように、左右一対の前側凹部21F及び左右一対の後側凹部21Rに係入した状態となる。
【0076】
図5〜図10に示すように、側面係止式移動操作装置STは、一対の環状チェーンCHの夫々における物品存在側となる経路部分を案内するガイド部材Gを、一対の環状チェーンCHの夫々に対応して棚左右方向で左右一対備えて構成されている。図12(a)及び(b)に示すように、左右の各ガイド部材Gは、上向き開口の細溝49が棚前後方向に沿って形成された棚前後方向に長尺の下部ガイド50と、棚左右方向で細溝49の物品非存在側の立面よりも物品存在側に突出する当接片51を備えた棚前後方向に長尺の側部ガイド52とからなり、昇降台13にブラケット53等により固定状態で支持されている。
【0077】
下部ガイド50は、環状チェーンCHの物品存在側となる経路部分の下方に配置されている。環状チェーンCHの物品存在側となる経路部分は、棚前後方向に沿う直線状部分と、その両端に位置するスプロケット40に巻き掛けられた曲線状部分とからなっている。そのため、環状チェーンCHの経路部分の曲線状部分の形状に合わせるべく、下部ガイド50の前後の端部50Tにおける細溝49の巻回経路内側の案内立面は、湾曲形状に形成されている。
【0078】
側部ガイド52は、棚前後方向で駆動スプロケット40dと従動スプロケット40fとの間に配置され、下部ガイド50の細溝49にて棚前後方向に沿って直線状に案内される環状チェーンCHのローラ55及び側面係止体SKの連結部20が位置する高さに当接片51の先端部が位置するように配置されている。
【0079】
このような構成により、環状チェーンCHが水平面内で巻回作動することで、環状チェーンCHの側面係止体SKが連結されている部分に設けられたガイドローラ56が下部ガイド50の端部50Tから細溝49に係入し、その後、巻回作動が進行するにつれて、側面係止体SKが連結されている部分の下部が下部ガイド50にて棚前後方向に案内される状態となり、この状態では、環状チェーンCHのローラ55及び側面係止体SKの連結部20が側部ガイド52にて棚左右方向で巻回経路の内方側にずれることが規制されことになる。このようにして、側面係止式移動操作装置STにてコンテナCを棚前後方向に移動させる場合に、環状チェーンCHの側面係止体SKが連結されている部分の前後でチェーンの屈曲が生じて側面係止体SKがコンテナCの縦方向に沿うリブ22から外れてしまう事態を防止している。
【0080】
〔傾斜規制アーム〕
図9及び図11に示すように、収納部8における収納位置と載置支持部MSの載置位置との間で移載対象のコンテナCを移動させる場合において、移載対象のコンテナCの正面側被係止部24に正面係止体FKを係合させた後、正面係止体FKが上昇操作されることで、当該コンテナCの棚前後方向で奥側の下端部が収納部8に支持されかつ当該コンテナCの棚前後方向で手前側の下端部が浮上した持ち上げ状態にするときに、当該コンテナCの移載方向視で移載対象のコンテナCが傾斜することを規制する傾斜規制手段LKが、移載装置CTに設けられている。
【0081】
移載装置CTは第1物品収納棚5a及び第2物品収納棚5aの収納部8に対して移載自在であり、傾斜規制手段LKについても、第1物品収納棚5aの収納部8に対してコンテナCを移載するときにコンテナCの移載方向視で移載対象のコンテナCが傾斜することを規制する第1の傾斜規制手段LKと、第2物品収納棚5bの収納部8に対してコンテナCを移載するときにコンテナCの移載方向視で移載対象のコンテナCが傾斜することを規制する第2の傾斜規制手段LKとを備えているが、両者は同様の構成なので、以下、第1の傾斜規制手段LKについて説明する。
【0082】
傾斜規制手段LKは、移載対象のコンテナCが傾斜したときに当該コンテナCにおける横向きのリブ25の水平方向に沿う上面部に上方から当接することで移載対象のコンテナCの傾斜を規制する規制部材として、図9に示すように、リブ25の上面部のうち、コンテナCの正面側被係止部24の棚左右方向で一方側の外方に位置する部分に対して規制作用する一方側規制部材としての傾斜規制アーム57と、リブ25の上面部のうち同他方側の外方に位置する部分に対して規制作用する他方側規制部材としての傾斜規制アーム57との左右一対の傾斜規制アーム57を備えている。傾斜規制アーム57は、平面視で湾曲した板状部材にて構成されており、その上面には、補強用の突条が幅方向中央部においてアームの湾曲形状に沿って設けられている。
【0083】
図4〜図6及び図11に示すように、傾斜規制アーム57は、作用部としての先端部が、移動操作装置Tにより棚前後方向に移動操作されるコンテナCのリブ25の上方において平面視で重複する取り出し用作用位置Pr1〜Pr2(図18(b)参照)及び受け渡し用作用位置Ps1〜Ps2(図19(b)参照)と、移動操作されるコンテナCに干渉しない退避位置P0(図18(b)及び図19(b)参照)とに水平面に沿って位置変更自在に構成されている。なお、本実施形態では、取り出し用作用位置Pr1〜Pr2と受け渡し用作用位置Ps1〜Ps2を同じ範囲P1〜P2に設定しているが、これらの範囲を各別に設定してもよい。
【0084】
移載対象のコンテナCが図9において仮想線で示すように傾斜したときには、リブ25のうち当該傾斜により上方に変移する側の被規制部が、傾斜規制アーム57の先端部に当接する。コンテナCの傾斜時にリブ25の上面部に当接することになる各傾斜規制アーム57の先端部の下面側には、弾性部材としての樹脂材料にて形成された保護シート58が装着されている。図5、図6及び図11に示すように、保護シート58は、取り出し用作用位置の始点Pr1(受け渡し用作用位置の終点Ps2)に傾斜規制アーム57が位置する状態で傾斜規制アーム57の先端部の端面からコンテナC側に僅かに膨出する状態で装着されている。これにより、コンテナCのリブ25の上面部及び正面部のリブ25より上方の部分が傾斜規制アーム57により損傷されること防止している。
【0085】
一対の傾斜規制アーム57を位置変更操作する位置変更操作手段ADが設けられており、一対の傾斜規制アーム57は、移動操作装置Tにより棚前後方向に移動操作されるコンテナCの移動経路の棚左右方向で外方側に設定されたY1・Y2周りに揺動することで、上記作用位置Pr1〜Pr2・Ps1〜Ps2と上記退避位置P0との間で位置変更自在となっており、先端部を揺動端部として、その先端部の揺動半径が変更調節自在に構成されている。
【0086】
傾斜規制アーム57を位置変更操作する位置変更操作手段ADについて説明する。図5、図6及び図9に示すように、位置変更操作手段ADは、一対の傾斜規制アーム57の夫々について各別に設けられており、駆動源であるアーム駆動モータM6も各別に設けられ、後述のクレーンコントローラHにより独立して制御される。以下、一方(図5、図6及び図9で右側)の傾斜規制アーム57についての位置変更操作手段ADについて説明する。
【0087】
図5、図6、図9及び図11に示すように、位置変更操作手段ADは、傾斜規制アーム57の揺動基部が下方側箇所に溶着されたボス59の上方側箇所に水平方向に突出する状態で溶着された連結片60の突端部と、縦軸心Y3周りに回転駆動される回転翼61の一方の端部とが、連結ロッド62の両端部に枢支連結されて構成されている。回転翼61は、アーム駆動モータM6に接続された減速機63の縦軸心Y3の出力軸64と一体回転するボス65に溶着されており、アーム駆動モータM6により回転駆動される。
【0088】
ボス59は、環状チェーンCHの従動スプロケット40fを軸支する軸部材42の上部に嵌挿されて縦軸心Y1周りに回転自在に軸支されている。なお、回転翼61の他方の端部には、第2の傾斜規制手段LKについての一方の傾斜規制アーム57を位置変更操作する位置変更操作手段ADにおける連結ロッド62が接続されている。また、第2の傾斜規制手段LKについての一方の傾斜規制アーム57の基端部が溶着されたボス59は、環状チェーンCHの駆動スプロケット40dを回転駆動する軸部材44と同一軸心となる状態で、駆動スプロケット40dの上方において回転自在に軸支されている。
【0089】
連結ロッド62は、雄ネジ部を有する連結部材62Tを、ロッド本体62Cの両端に形成された雌ネジ部の夫々に螺入させて構成されたターンバックル式に構成されており、その長さが調節自在となっている。これにより、傾斜規制アーム57の先端部の揺動半径が変更調節自在に構成されている。
【0090】
図11に示すように、減速器63の縦軸心の出力軸64の上端部には、傾斜規制アーム57の取り出し用作用位置の始点Pr1(受け渡し用作用位置の終点Ps2)及び取り出し用作用位置の終点Pr2(受け渡し用作用位置の始点Ps1)並びに退避位置P0を検出するための上下一組の検出板67U・67Dが設けられている。検出板67U・67Dは、いずれも外周部において円周方向に沿う扇状に形成されており、出力軸64により夫々が備える切欠の位相差を維持したまま一体回転する。
【0091】
一対のアーム位置検出用センサ66a・66bは、フォトマイクロスイッチにて構成されており、棚前後方向に並ぶ状態で、検出部を互いに対向させる姿勢で設けられている。棚前後方向で前側(第1物品収納棚5a側)に配置されたアーム位置検出用第1センサ66aは、縦方向に検出光軸を1本備え、上段検出板67Uの扇状部を検出する。棚前後方向で後側(第2物品収納棚5b側)に配置されたアーム位置検出用第2センサ66bは、縦方向に検出光軸を2本備え、下段検出板67Dの半径方向に2段階の深さで形成された扇状部の夫々を検出する。
【0092】
そして、後述するクレーンコントローラHが、プログラム形式で構成されたアーム位置判別部J2(図13参照)を機能させて、一対のアーム位置検出用センサ66a・66bの検出情報の組み合わせから、上下一組の検出板67U・67Dの回転位相を判別することで、傾斜規制アーム57が作用位置の始点及び終点Pr1・Pr2(Ps1・Ps2)や退避位置P0に位置しているか否かを判別できるようになっている。
【0093】
〔コンテナ位置検出センサ〕
図10及び図11に示すように、移載装置CTの棚前後方向で中央箇所及び前後両端箇所の3箇所に、移載中のコンテナCの棚前後方向の位置を検出するコンテナ位置検出用センサ68が設けられている。コンテナ位置検出用センサ68は、投光器及び受光器を備えた投受光式の光センサにて構成され、棚前後方向の複数箇所に配置されたブラケット69により支持される左右のセンサ取付レール70に投光器及び受光器が夫々取り付けられている。センサ取付レール70には、棚前後方向に沿う取付用の溝が形成されており、各コンテナ位置検出用センサ68を棚前後方向の任意の位置で支持できるようになっている。これにより、各コンテナ位置検出用センサ68は、棚前後方向の位置が調節自在となっている。
【0094】
コンテナ位置検出用センサ68は棚左右方向の水平向きの検出光を投射する投光部とこの検出光を受光する受光部とを備えて、検出光の有無により、コンテナCの存否を検出する。3つのコンテナ位置検出用センサ68のうち、棚前後方向で中央に位置する中央センサ68cは、上述の側面係止式移動操作手段STの環状チェーンCHの巻回作動速度の高速・低速の切換タイミングの検出用である。
【0095】
棚前後方向で後側(第1物品収納棚5a側)に位置する第1センサ68aは、第1物品収納棚5aの収納部8へコンテナCを受け渡す出す場合に、コンテナCが中継位置に位置するタイミングの検出用であり、かつ、第2物品収納棚5bの収納部8からコンテナCを取り出す場合に、コンテナCが載置位置に位置するタイミングよりも設定時間手前のタイミングの検出用である。
【0096】
棚前後方向で前側(第2物品収納棚5b側)に位置する第2センサ68bは、第2物品収納棚5bの収納部8へコンテナCを受け渡す出す場合に、コンテナCが中継位置に位置するタイミングの検出用であり、かつ、第1物品収納棚5aの収納部8からコンテナCを取り出す場合に、コンテナCが載置位置に位置するタイミングよりも設定時間手前のタイミングの検出用である。
【0097】
〔制御構成〕
スタッカークレーン1には、正面係止式移動操作装置FT及び側面係止式移動操作装置STの作動含めてスタッカークレーン1の作動を制御するクレーンコントローラHが設けられている。クレーンコントローラHは、図13に示すように、上述した走行モータM1、昇降モータM2、フォーク出退モータM3、フォーク昇降モータM4、チェーン駆動モータM5、一対のアーム駆動モータM6の駆動を制御する。また、クレーンコントローラHは、上述した、各位置変更操作手段ADの夫々についての一対のアーム位置検出用センサ66a・66b(図13では一つの位置変更操作手段ADのものだけ記載している。)や、コンテナ位置検出用センサ68としての中央センサ68c並びに第1センサ68a及び第2センサ68bのほか、フォーク下限位置検出センサ71や一対のフォーク引退位置検出センサ36といった各部のセンサの検出情報が入力される。なお、図8では、走行台車3の走行位置を検出する走行位置検出センサや昇降台13の昇降位置を検出する昇降位置検出センサ、各種モータへの電力を制御するインバータやサーボアンプなどは省略している。
【0098】
クレーンコントローラHは、収納部8と移載装置CTとの間でコンテナCの移載を行うにあたり、移載対象の収納部8について設定された移載用位置に移載装置CTを位置させるべく、走行用モータM1により走行駆動する走行台車3の走行作動及び昇降台13の昇降作動(昇降モータM2による駆動)を制御する。移載用位置は、走行方向(棚左右方向)では、移載装置CTの中央位置と移載対象の収納部8の中央位置とが一致し、かつ、昇降方向(棚上下方向)では収納部8の前端ストッパ17の上端部よりも設定量だけ高い位置に載置支持部MSの載置支持面が位置する高さに設定されている。
【0099】
そして、収納部8からコンテナCを取り出す場合も、収納部8へコンテナCを受け渡す場合も、クレーンコントローラHは、移載装置CTを、収納部8についての移載用位置に位置させた状態のまま移動操作装置T及び昇降操作手段UD並びに位置変更操作手段ADの作動を制御する。なお、以下の説明では、第1物品収納棚5aの収納部8に対する移載動作を例に、クレーンコントローラHによる移載装置Cの制御動作を説明する。
【0100】
〔移動操作装置の制御〕
クレーンコントローラHは、移動操作装置TによるコンテナCの移動範囲のうち収納位置(奥棚及び手前棚)と中継位置(図21及び図22(f)に示す位置)との間で移載対象のコンテナCを正面係止式移動操作装置FTにて棚前後方向に移動させるべく、フォーク出退モータM3及びフォーク昇降モータM4の作動を制御する正面係止式移動操作処理を実行し、移動操作装置TによるコンテナCの移動範囲のうち中継位置と載置位置(図8及び図24(i))との間で移載対象のコンテナCを側面係止式移動操作装置STにて棚前後方向に移動させるべく、チェーン駆動モータM5の作動を制御する側面係止式移動操作処理を実行する。
【0101】
コンテナCを収納部8から取り出すべく収納位置から載置位置にコンテナCを移動させる場合は、正面係止式移動操作装置FTによりコンテナCを棚前後方向に移動(図18(a)でFr5〜Fr6に示す動きであり図20〜図21及び図22(c)〜図23(e)に示す動きである。)させた後に、正面係止体FKを正面側被係止部24から離脱させるべく、昇降操作手段UDにより正面係止式移動操作装置FTを第4上昇高さH4から下降高さH0に下降(図18(a)でFr6〜Fr7に示す動きであり図23(e)〜図23(f)の動きである。)させるように、フォーク昇降モータM4の作動を制御する。
【0102】
コンテナCを収納部8へ受け渡すべく載置位置から収納位置にコンテナCを移動させる場合は、側面係止式移動操作装置STによりコンテナCを棚前後方向に移動させた後に、正面係止体FKを正面側被係止部24に係止させるべく昇降操作手段UDにより正面係止式移動操作装置FTを下降高さH0から第2上昇高さH2に上昇(図19(a)でFs0〜Fs1に示す動きである。)させ、さらに、第2上昇高さH2から第3上昇高さH3に上昇(図19(a)でFs2〜Fs3に示す動きである。)させるように、フォーク昇降モータM4の作動を制御する。
【0103】
コンテナCを収納部8から取り出す場合にクレーンコントローラHが実行する取出用正面係止式移動操作処理及び取出用側面係止式移動操作処理について説明する。以下の説明では、第1物品収納棚5a及び第2物品収納棚5bのうち第1物品収納棚5aの収納部8からコンテナCを取り出す場合、特に、この収納部8が備える前後2つの収納位置のうち奥棚からコンテナCを取り出す場合を例に、説明する。図22〜図24には、取出用正面係止式移動操作処理及び取出用側面係止式移動操作処理が実行されることで移動操作されるコンテナCの状態を状態(a)〜状態(i)にて示している。以下の説明では、図14及び図15のフローチャートに基づいて説明するが、図22〜図24の状態(a)〜状態(i)も適宜参照しながら説明する。
【0104】
まず、取出用正面係止式移動操作処理について図14に示すフローチャートに基づいて説明する。図14のフローチャートでは、正面係止体FKについての位置及び傾斜規制アーム57の位置を示す符号を各処理に対応させて記載している。これらの符号は、コンテナCを収納部8から取り出す場合の正面係止体FKについての位置の変化(黒小丸)と傾斜規制アーム57の位置の変化(白大丸)との対応を示す図18(a)における符号を用いている。正面係止式移動操作装置FT(多段フォークFD及び正面係止体FK)を昇降させ、また、多段フォークFDの第1フォーク31を出退させることを、以下では、簡単に、正面係止体FKを昇降させる、出退させる、と表現する。
【0105】
ステップ#Rf1(以下ではステップという語を省略する)で、状態(a)において、フォーク出退モータM3の突出方向での回転駆動を開始させる。なお、状態(a)では、直前のコンテナCの受け渡し動作により、正面係止体FKが係止用準備高さH1で引退位置に位置している。
【0106】
#Rf2〜#Rf3のループで、正面係止体FKが突出限度に達するまでの間、フォーク出退モータM3の出力トルクが当接検出用の設定値以上となるかを監視する。通常は、正面係止体FKが突出限度に達するまでに正面係止体FKが移載対象のコンテナCの正面部における被押当部分Z2に当接することにより、出力トルクが当接検出用の設定値以上となって、#Rf4へ移行してフォーク出退モータM3の作動を停止させて、状態(b)とする。出力トルクが当接検出用の設定値以上となることなく、正面係止体FKが突出限度に達した場合は、#Rf5へ移行し、システム異常とする。
【0107】
なお、正面係止体FKが突出限度は、上位の管理コントローラからの送信される移載対象の物品についての収納位置情報に基づいて、クレーンコントローラHに記憶されている奥棚用突出限度情報及び手前棚用突出限度情報の2つのうちの何れか一方が取出用正面係止式移動操作処理の実行初期に選択設定される。
【0108】
#Rf6で、フォーク出退モータM3を引退方向にわずかに回転駆動させて、図20に示すように、正面係止体FKの立ち上がり部の先端を棚前後方向で係入空間Z1の中間に位置させてから、#Rf7で、フォーク昇降モータM4を上昇側に回転駆動させて、正面係止体FKを係止用準備高さ(第1上昇高さH1)から取出用引込高さ(第3上昇高さH3)に上昇させて、状態(c)とする。
【0109】
このように、正面係止体FKを移載対象のコンテナCの正面部における被押当部分Z2に当接させた後に引退方向に戻す操作をしてから、係入空間Z1の中間に位置させることで、移載対象のコンテナCが収納位置から僅かにずれている場合でも、正面係止体FKを係入空間Z1に適正に係入させることができるようになっている。
【0110】
#Rf8で、フォーク出退モータM3を引退方向に回転駆動させて、図21に示すように、正面係止体FKを、棚前後方向で前端ストッパ17の奥側に設定された持ち上げ状態切換位置に位置させる。奥棚からコンテナCを取り出す場合と、手前棚からコンテナCを取り出す場合とでは、#Rf8における持ち上げ状態切換位置までの移動距離は当然ながら異なる。なお、移載対象のコンテナCが収納位置から僅かにずれている場合でも、#Rf8での移動によりコンテナCが持ち上げ状態切換位置に位置するため、移載対象のコンテナCの収納位置でのずれの程度によっても#Rf8での移動距離は変動する。
【0111】
#Rf9で、フォーク昇降モータM4を上昇方向に回転駆動させて、正面係止体FKを取出用引込高さ(第1上昇高さH1)からストッパ乗越用高さ(第4上昇高さH4)まで上昇させて、状態(d)とする。#Rf9で正面係止体FKが上昇を開始すると、コンテナCの棚前後方向で手前側端部が持ち上がり始めて、コンテナCは持ち上げ状態となる。その後、正面係止体FKがストッパ乗越用高さとなるまで、コンテナCの棚前後方向で手前側端部の上昇が継続する。
【0112】
#Rf10で、フォーク出退モータM3の引退方向での回転駆動を開始させて、#Rf11のループで正面係止体FKが引退位置に達したか否かを監視する。一対の引退位置検出センサ36の検出情報に基づいて、正面係止体FKが引退位置に達したことが検出されると、#Rf12でフォーク出退モータM3の回転駆動を停止させて、状態(e)とする。
【0113】
#Rf10でフォーク出退モータM3の引退方向での回転駆動を開始させてから、#Rf12で停止させるまでの間、後述するように、アーム位置判別部J2の判別情報に基づいて、位置変更操作手段ADにより、取り出し用作用位置の始点Pr1から取り出し用作用位置の終点Pr2まで、追従用の速度VLで一対の傾斜規制アーム57が、コンテナCの棚手前側への移動に追従する状態で揺動操作される。これにより、持ち上げ状態のコンテナCが移載方向視で傾斜しても、コンテナCを中継位置まで適切に移動操作できるようにしている。
【0114】
面係止体FKが引退位置に達する間際には、コンテナCの底面が載置支持部MSに当接しており、状態(e)では、コンテナCは、棚前後方向で奥側の下端部が収納部8に支持され、かつ、底面が載置支持部MSにて支持された状態となっている。これにより移載対象のコンテナCについての収納位置から中継位置までの移動が完了する。なお、コンテナCの持ち上げ状態は、正面係止体FKが引退位置に達する間際に終了する。
【0115】
コンテナCについての中継位置までの移動が完了した後は、その後の載置位置までの移動を側面係止式移動操作装置STに引き継ぐべく、#Rf13で、フォーク昇降モータM4を下降方向に回転駆動させて、正面係止体FKをストッパ乗越用高さ(第4上昇高さH4)から下降高さH0まで下降させて、状態(f)とする。以上で、取出用正面係止式移動操作処理が完了する。なお、#Rf13で、正面係止体FKを下降させると同時に、取出用側面係止式移動操作処理により、側面係止体SKを左右一対の前側凹部21Fに係入させる。
【0116】
次に、取出用正面係止式移動操作処理について図15に示すフローチャートに基づいて説明する。
【0117】
#Rs1で、状態(e)において、取出用正面係止式移動操作処理により正面係止体FKが下降すると同時に、チェーン駆動モータM5を、低速巻回速度V1に対応する回転速度で受け取り用の回転方向で駆動して、環状チェーンCHを受け取り方向で低速巻回速度V1で巻回作動させる。これにより、側面係止体SKを待機位置から係合始点位置に移動させて、中継位置に位置しているコンテナCの左右一対の前側凹部21Fに係合させ、状態(f)とする。
【0118】
なお、状態(e)では、直前のコンテナCの受け渡し動作により、側面係止体SKが図5及び図6に示す待機位置に位置している。図1〜図4でも、側面係止体SKは待機位置に位置しているはずであるが、説明の便宜上、側面係止体SKを実際とは異なる位置に示している。
【0119】
#Rs2で、状態(e)において、チェーン駆動モータM5を、受け取り用の回転方向で高速速巻回速度V2に対応する回転速度で回転駆動させて、環状チェーンCHを受け取り方向で高速速巻回速度V2で巻回作動させる。#Rs3のループで、中央センサ68bがコンテナCの棚前後方向で手前側の端部を検出してONとなるか監視する。これによりコンテナCが、高速カット位置を通過したことを検出できる。#Rs3のループにより、状態(g)に示す程度までコンテナCの移動が進行すると、中央センサ68bがONすることで、#Rs3から#Rs4へ移行し、チェーン駆動モータM5の回転速度が、高速速巻回速度V2に対応する回転速度から、低速巻回速度V1に対応する回転速度に切り換えられ、環状チェーンCHの巻回作動速度が、高速速巻回速度V2から低速巻回速度V1に減速され、そのまま移動操作が継続する。
【0120】
このとき、コンテナCが状態(g)に示す傾斜姿勢から載置支持部MSに載置支持された水平方向に沿う姿勢に急激に変化することになる。コンテナCの急激な姿勢変化により、コンテナCの底面が載置支持部MSの載置支持面に衝突するが、載置支持部MSにおける一対のローラコンベヤ27の各ローラ28にはウレタンゴムシート30が装着されているので、載置支持面に対する衝突時の衝撃が緩和されるとともに、衝撃音の発生も抑制される。
【0121】
#Rs5のループで、第2センサ68cがコンテナCの棚前後方向で手前側の端部を検出してONとなるかを監視する。第2センサ68cがONすると#Rs5から#Rs6へ移行しタイマのカウントが開始される。そして#Rs7のループにより、タイマが第1設定カウント値に達すると、コンテナCが停止準備位置を通過したとして、#Rs7から#Rs8へ移行する。
【0122】
#Rs8では、フォーク昇降モータM4を上昇方向に回転駆動させて、正面係止式移動操作装置FTを下降高さH0から取出用引込高さ(第1上昇高さH1)まで上昇させて、状態(h)とする。その後、#Rs9のループでタイマが第2設定カウント値に達すると、コンテナCが載置位置に達したとして、#Rs9から#Rs10へ移行し、チェーン駆動モータM5の回転駆動を停止させて、環状チェーンCHの巻回作動を停止させる。
【0123】
このように、側面係止式移動操作装置STによるコンテナCの移動が完了する直前で、正面係止式移動操作装置FTを上昇させることで、多段フォークFDの第1フォークとの間で適度な摩擦力を得た状態で、側面係止体SKを停止させることができ、コンテナCを停止させた位置で適切に保持することができる。なお、取出用側面係止式移動操作処理が完了した後は、搬送先である移載対象箇所についての移載用位置に移載装置CTを位置させるべく、スタッカークレーン1を走行作動又は昇降作動させるが、その間は、正面係止式移動操作装置FTを第1上昇高さH1に維持するようにしている。これによる、スタッカークレーン1による搬送中にコンテナCが位置ずれすることを防止している。
【0124】
以上のように、クレーンコントローラHは、コンテナCを収納部8から取り出す場合において、収納位置から載置位置までコンテナCを移動させるときに、正面係止式移動操作装置FTにより移動されるコンテナCが中継位置に位置すると、正面係止体FKを正面側被係止部24から離脱させるべく、正面係止式移動操作装置FTを下降高さH0に下降させる離脱用下降処理(取出用正面係止式移動操作処理における#Rf13)を実行し、その後、側面係止式移動操作装置STにより移動されるコンテナCが載置位置から設定距離だけ手前の停止準備位置に位置すると、移載対象のコンテナCを正面係止式移動操作装置FTの載置支持面にて載置支持するべく、正面係止式移動操作装置FTを第1上昇高さH1に上昇させる載置支持用上昇処理(取出用側面係止式移動操作処理における#Rs8)を実行する。
【0125】
コンテナCを収納部8へ受け渡す場合にクレーンコントローラHが実行する受渡用側面係止式移動操作処理及び受渡用正面係止式移動操作処理については、図16及び図17に示す通りである。コンテナCを収納部8から取り出す場合のような詳細な説明は省略するが、コンテナCを収納部8へ受け渡す場合でも、#Sf4でフォーク出退モータM3の突出方向での回転駆動を開始させてから、#Sf6で停止させるまでの間、後述するように、アーム位置判別部J2の判別情報に基づいて、位置変更操作手段ADにより、受け渡し用作用位置の始点Ps1から受け渡し用作用位置の終点Ps2まで、追従用の速度VLで一対の傾斜規制アーム57が、コンテナCの棚奥側への移動に追従する状態で揺動操作される。これにより、持ち上げ状態のコンテナCが移載方向視で傾斜しても、コンテナCを棚前後方向で前端ストッパ17の奥側に設定された持ち上げ状態切換位置にまで適切に移動操作できるようにしている。
【0126】
なお、受渡用正面係止式移動操作処理を示す図17のフローチャートでは、図14同様に、正面係止体FKについての位置及び傾斜規制アーム57の位置を示す符号を各処理に対応させて記載している。これらの符号は、コンテナCを収納部8へ受け渡す場合の正面係止体FKについての位置(黒小丸)の変化と傾斜規制アーム57の位置(白大丸)の変化との対応を示す図19(a)における符号を用いている。
【0127】
〔位置変更操作手段の制御〕
一対の傾斜規制アーム57を位置変更操作する位置変更操作手段ADの作動は、クレーンコントローラHにより、移動操作装置T(正面係止式移動操作装置FT及び側面係止式移動操作装置ST)の作動状態に合わせて制御される。すなわち、図13に示すように、クレーンコントローラHは、作動状態判別手段としてプログラム形式で構成された作動状態判別部J1を備えて作動中の移動操作装置Tの作動状態を判別できるようになっており、作動状態判別部J1の判別情報に基づいて、以下の処理を実行して位置変更操作手段ADの作動を制御する。
【0128】
すなわち、コンテナCを収納部8から取り出す場合は、一対の傾斜規制アーム57を退避位置P0から取り出し用作用位置の始点Pr1へ準備用の速度VHで揺動操作する取り出し用準備処理、一対の傾斜規制アーム57を取り出し用作用位置の始点Pr1から取り出し用作用位置の終点Pr2へ追従用の速度VLで揺動操作する取り出し用追従処理、一対の傾斜規制アーム57を取り出し用作用位置の終点Pr2から退避位置P0へ準備用の速度VHで揺動操作する取り出し用退避処理を順次実行する。
【0129】
また、コンテナCを収納部8へ受け渡す場合は、一対の傾斜規制アーム57を退避位置P0から受け渡し用作用位置の始点Ps1へ準備用の速度VHで揺動操作する受け渡し用準備処理、一対の傾斜規制アーム57を受け渡し用作用位置の始点Ps1から受け渡し用作用位置の終点Ps2へ追従用の速度VLで揺動操作する受け渡し用追従処理、一対の傾斜規制アーム57を受け渡し用作用位置の終点Ps2から退避位置P0へ準備用の速度VHで揺動操作する受け渡し用退避処理を順次実行する。
【0130】
図13に示すように、作動状態判別部J1は、正面係止式移動操作装置FT及び側面係止式移動操作装置STを駆動する各サーボモータM3〜M5のフィードバック情報及び移載対象のコンテナCの棚前後方向の位置を検出する3つのコンテナ位置検出用センサ68の検出情報に基づいて、作動中の移動操作装置Tの作動状態を判別する。
【0131】
図18は、コンテナCを収納部8から取り出す場合の正面係止式移動操作装置FTの作動状態Fr0〜Fr7と、位置変更操作手段ADにより位置変更操作される一対の傾斜規制アーム57の位置の変化(P0〜Pr1〜Pr2〜Pr0)を示している。図18(a)に示す正面係止式移動操作装置FTの作動状態Fr0〜Fr7は、図左右方向にて多段フォークFDの引退位置からの突出量(正面係止体FKの棚前後方向の位置)を示し、図上下方向にて昇降操作手段UDによる多段フォークFDの昇降位置(正面係止体FKの棚上下方向の位置)を示している。図18(a)に示す傾斜規制アーム57の位置の変化(P0〜Pr1〜Pr2〜Pr0)は、図18(b)で示す傾斜規制アーム57の位置に対応している。なお、図18(b)で示す傾斜規制アーム57は、第1物品収納棚5a側の一対の傾斜規制アーム57のうち、図4〜図6で紙面左側に位置する傾斜規制アーム57を示しており、コンテナCを収納部8から取り出す場合の図4〜図6に示された各位置と対応している。
【0132】
同様に、図19は、コンテナCを収納部8へ受け渡す場合の正面係止式移動操作装置FTの作動状態Fs0〜Fs7と、位置変更操作手段ADにより位置変更操作される一対の傾斜規制アーム57の位置の変化(P0〜Ps1〜Ps2〜Ps0)を示している。図19(a)に示す正面係止式移動操作装置FTの作動状態Fs0〜Fs7は、図左右方向にて多段フォークFDの引退位置からの突出量(正面係止体FKの棚前後方向の位置)を示し、図上下方向にて昇降操作手段UDによる多段フォークFDの昇降位置(正面係止体FKの棚上下方向の位置)を示している。図19(a)に示す傾斜規制アーム57の位置の変化(P0〜Ps1〜Ps2〜Ps0)は、図19(b)で示す傾斜規制アーム57の位置に対応している。
【0133】
コンテナCを収納部8から取り出す場合のクレーンコントローラHによる位置変更操作手段ADの制御動作について図18を参照しながら説明する。正面係止式移動操作装置FTは初期状態Fr0では、正面係止体FKは引退位置で第1高さH1に位置している。これは、図19(a)に示すコンテナCを収納部8へ受け渡す場合の正面係止式移動操作装置FTの第7状態Fs7と同じである。コンテナCを収納部8へ受け渡す動作が完了した後は、正面係止式移動操作装置FTは次のコンテナCの取り出し動作までその状態が維持されるためである。
【0134】
クレーンコントローラHは、正面係止式移動操作装置FTに、作動状態Fr0で正面係止体FKの突出を開始させて後(又は同時に)、取り出し用準備処理を実行して、アーム位置判別部J2の判別情報に基づいて、位置変更操作手段ADに、退避位置P0から取り出し用作用位置の始点Pr1まで、準備用の速度VHで一対の傾斜規制アーム57を揺動操作させる。準備用の速度VHは、取り出し用作用位置の始点Pr1への揺動が、正面係止式移動操作装置FTが作動状態Fr2で正面係止体FKの上昇操作を開始するまでには完了するように設定されている。
【0135】
正面係止式移動操作装置FTが、作動状態Fr2から作動状態Fr5に遷移するまでは、位置変更操作手段ADは作動させず一対の傾斜規制アーム57を取り出し用作用位置の始点Pr1で位置保持する。
【0136】
正面係止式移動操作装置FTに、作動状態Fr5で正面係止体FKの引退を開始させると同時に、取り出し用追従処理を実行して、アーム位置判別部J2の判別情報に基づいて、位置変更操作手段ADに、取り出し用作用位置の始点Pr1から取り出し用作用位置の終点Pr2まで、追従用の速度VLで一対の傾斜規制アーム57を揺動操作させる。追従用の速度VHは、一対の傾斜規制アーム57の先端部の棚前後方向での移動速度が、位置変更操作手段ADにより移動操作されるコンテナCの移動速度と同じになるように設定されている。
【0137】
正面係止式移動操作装置FTが正面係止体FKの引退を終了させて作動状態Fr6となると、コンテナCは中継位置に位置しており、棚前後方向で奥側の下端部が収納部8に支持され、底面の棚前後方向で手前側が載置支持部MSに支持された状態となっているため、コンテナCに偏荷重が存在していても、もはやコンテナCが移載方向視で傾斜するおそれはない。そこで、クレーンコントローラHは、正面係止式移動操作装置FTに、作動状態Fr6で正面係止体FKの下降を開始させると同時に、取り出し用退避処理を実行して、アーム位置判別部J2の判別情報に基づいて、位置変更操作手段ADに、取り出し用作用位置の終点Pr2から退避位置P0まで、準備用の速度VHで一対の傾斜規制アーム57を揺動操作させる。
【0138】
一対の傾斜規制アーム57は、正面係止式移動操作装置FTが正面係止体FKを下降高さH0まで下降させて作動状態Fr7となるまでに、退避位置P0までの揺動が完了するため、側面係止式移動操作装置STがコンテナCの移動操作を開始する時には、一対の傾斜規制アーム57は、コンテナCと干渉しない退避位置P0となっている。
【0139】
コンテナCを収納部8へ受け渡す場合のクレーンコントローラHによる位置変更操作手段ADの制御動作について図19を参照しながら説明する。
側面係止式移動操作装置STがコンテナCを中継位置までの移動操作を完了させた時点では、一対の傾斜規制アーム57は、未だ移動操作されておらず、退避位置P0に位置している。そして、クレーンコントローラHは、正面係止式移動操作装置FTを作動状態Fs0〜作動状態Fs2とする間も、位置変更操作手段ADを作動させず、一対の傾斜規制アーム57を退避位置P0から移動させない。そして、正面係止式移動操作装置FTが作動状態Fs2となった後、正面係止式移動操作装置FTに、作動状態Fs2で正面係止体FKを受け渡し用準備高さ(第2上昇高さH2)から上昇させる前に、受け渡し用準備処理を実行して、アーム位置判別部J2の判別情報に基づいて、位置変更操作手段ADに、退避位置P0から受け渡し用作用位置の始点Ps1まで、準備用の速度VHで一対の傾斜規制アーム57を揺動操作させる。一対の傾斜規制アーム57が受け渡し用作用位置の始点Ps1に達するまで、正面係止式移動操作装置FTは、正面係止体FKを受け渡し用準備高さ(第2上昇高さH2)で位置保持させ、対の傾斜規制アーム57が受け渡し用作用位置の始点Ps1に達すると、正面係止体FKを受け渡し用準備高さ(第2上昇高さH2)からの上昇を開始させて、コンテナCを持ち上げ状態とし、そのままストッパ乗越用高さ(第4上昇高さH4)まで持ち上げる。
【0140】
このように、正面係止式移動操作装置FTが作動状態Fs2となるまで、つまり、側面係止式移動操作装置STにて中継位置まで移動操作されたコンテナCの係入空間Z1に対して、正面係止体FKを係入させるための上昇操作を開始するまで、位置変更操作手段ADを作動させないことで、側面係止式移動操作装置STにて中継位置まで移動操作されるコンテナCと一対の傾斜規制アーム57との干渉を回避でき、また、コンテナCが極力棚奥側まで移動した状態で一対の傾斜規制アーム57を受け渡し用作用位置の始点Ps1とすることで、さらに棚奥側となる受け渡し用作用位置の終点Ps2まで、一対の傾斜規制アーム57をコンテナCに対する作用位置を適切に維持したまま揺動操作させることができるようにしている。
【0141】
そして、正面係止式移動操作装置FTに、作動状態Fs3で正面係止体FKの突出を開始させると同時に、受け渡し用追従処理を実行して、アーム位置判別部J2の判別情報に基づいて、位置変更操作手段ADに、受け渡し用作用位置の始点Ps1から受け渡し用作用位置の終点Ps2まで、追従用の速度VLで一対の傾斜規制アーム57を揺動操作させる。
【0142】
正面係止式移動操作装置FTが正面係止体FKの突出を終了させて作動状態Fs4となると、コンテナCは持ち上げ状態切換位置に位置しており、コンテナCは収納部8に載置支持された状態となっているため、コンテナCに偏荷重が存在していても、もはやコンテナCが移載方向視で傾斜するおそれはない。そこで、クレーンコントローラHは、正面係止式移動操作装置FTに、作動状態Fs4で正面係止体FKの下降を開始させると同時に、受け渡し用退避処理を実行して、アーム位置判別部J2の判別情報に基づいて、位置変更操作手段ADに、受け渡し用作用位置の終点Pr2から退避位置P0まで、準備用の速度VHで一対の傾斜規制アーム57を揺動操作させる。
【0143】
以上説明した通り、クレーンコントローラHは、移動操作装置Tを作動させない場合は傾斜規制アーム57を退避位置P0に位置させ、移動操作装置Tを作動させる場合は、作動状態判別部J1の判別情報に基づいて、移載対象のコンテナCが載置支持部MSに支持された載置状態となっているときは傾斜規制アーム57を退避位置P0に位置させるべく、位置変更操作手段ADの作動を制御する。そして、コンテナCを収納部8から取り出す場合において移載対象のコンテナCが持ち上げ状態となっているとき(図4、図5及び図9)は傾斜規制アーム57を取り出し用作用位置Pr1〜Pr2(図18(b)参照)に位置させ、コンテナCを収納部8から受け渡す場合において移載対象のコンテナCが持ち上げ状態となっているときは受け渡し用作用位置Ps1〜Ps2(図19(b)参照)に位置させるべく、位置変更操作手段ADの作動を制御するように構成されている。
【0144】
また、クレーンコントローラHは、傾斜規制アーム57の位置を切り換えるタイミングを作動状態判別部J1の判別情報に基づいて判断し、傾斜規制アーム57の位置をアーム位置判別部J2の判別情報に基づいて判断する。
【0145】
クレーンコントローラHは、持ち上げ状態で棚前後方向に移動するコンテナCに追従して傾斜規制アーム57が取り出し用作用位置Pr1〜Pr2や受け渡し用作用位置Ps1〜Ps2に維持されるように、傾斜規制アーム57追従用の速度VLで位置変更させるべく位置変更操作手段ADの作動を制御し、傾斜規制アーム57を退避位置P0から取り出し用作用位置の始点Pr1や受け渡し用作用位置の始点Ps1に位置変更するとき、取り出し用作用位置の終点Pr2や受け渡し用作用位置の終点Ps2から退避位置P0に位置変更するときは、傾斜規制アーム57を追従用の速度VLよりも高速の準備用の速度VHで位置変更させるべく位置変更操作手段ADの作動を制御するように構成されている。
【0146】
〔別の実施形態〕
以上、発明者によってなされた発明を発明の実施の形態に基づき具体的に説明したが、本発明は上記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能である。以下、本発明の別実施形態を例示する。
【0147】
(1)上記実施形態では、正面係止式移動操作装置による物品の移動と側面係止式移動操作装置による物品の移動とが、棚前後方向における中継箇所の1箇所で切り換わるものを例示したが、正面係止式移動操作装置による物品の移動と側面係止式移動操作装置による物品の移動とが、棚前後方向で重複する範囲を持つようにして、中継範囲では、正面係止式移動操作装置FT及び側面係止式移動操作装置STとの双方にて物品を移動操作されるものであってもよい。
【0148】
(2)上記実施形態では、正面係止式移動操作装置を載置支持部に対して昇降操作することで、物品の正面側被係止部に対して正面係止体を係脱させるものを例示したが、これに代えて、スタッカークレーンの昇降台を昇降させることで、物品の正面側被係止部に対して正面係止体を係脱させるものであってもよい。
【0149】
(3)上記実施形態では、載置支持部をローラコンベヤにて構成したものを例示したが、載置支持部を、移載対象の物品が棚前後方向に移動されるときに物品の底面を摺動自在に支持する載置支持台にて構成してもよい。また、ローラコンベヤにて構成する場合には、棚前後方向で棚側の端部に位置するローラに代えて、移載対象の物品が前記中継位置に位置しているときに当該物品の底面を受け止め支持する受止体を備えて構成してもよい。
【0150】
(4)上記実施形態では、収納部が棚前後方向に2個の物品を収納可能に構成されたものを例示したが、収納部が棚前後方向に3個以上の物品を収納可能に構成されたもの、又は、収納部が棚前後方向に単一の物品を収納可能に構成されたものであってもよい。
【0151】
(5)上記実施形態では、移動操作装置が、収納部における規制用突部の上端部よりも高い位置に載置支持部の載置支持面を位置させた状態で、コンテナを棚前後方向に移動操作するものを例示したが、収納部に規制用突部を設けない場合は、移動操作装置が、収納部の載置支持面と同じ高さ又はそれよりも設定量だけ高い高さに載置支持部の載置支持面を位置させた状態で、コンテナを棚前後方向に移動操作するものであってもよい。
【0152】
(6)上記実施形態では、移動操作装置が、収納部から物品を取り出す場合も、収納部へ物品を受け渡す場合も、移載手段を、収納部についての同じ移載用位置に位置させるものを例示したが、これに限らず、収納部から物品を取り出す場合は、移載手段を収納部についての取り出し用の移載用位置に位置させ、収納部へ物品を受け渡す場合は、移載手段を、取り出し用の移載用位置とは上下方向の位置が異なる受け渡し用の移載用位置に位置させるものであってもよい。
【符号の説明】
【0153】
C 物品
H 制御手段
CT 移載手段
MS 載置支持部
T 移動操作装置
FT 正面係止式移動操作装置
FD 多段フォーク
FK 正面係止体
H0 下降高さ
H1 上昇高さ
ST 側面係止式移動操作装置
CH 一対の無端回動帯
G ガイド部材
1 スタッカークレーン
4 移動用通路
5 物品収納棚
8 収納部
17 規制用突部
20 左右一対の側面係止体
22R 取り出し用のリブ
22S 受け渡し用のリブ
22 一組のリブ
24 正面側被係止部
27 ローラコンベヤ
28 ローラ
30 弾性部材
34 フォーク体
【技術分野】
【0001】
本発明は、平面視矩形状の物品を載置支持する収納部が上下左右に並ぶ状態で配設された物品収納棚と、前記物品収納棚の前面側において走行自在で、かつ、前記収納部との間で物品を移載自在な移載手段を昇降自在に備えて構成されたスタッカークレーンとが設けられた物品収納設備に関する。
【背景技術】
【0002】
上記物品収納設備は、物品として、例えば、荷を収容自在なコンテナを、物品収納棚における複数の収納部にて保管するものであり、収納部に対する物品の取り出し及び受け渡しは、スタッカークレーンにより自動的に行われる。
ところで、一般に物品収納設備では、収納可能な物品の個数が多いことだけでなく、設備の設置空間に対する物品の収納可能数が多いこと、つまり、収納効率が高いことが望まれる。
例えば、収納部に収納されている物品の底面よりも下方の空間にフォークを突入させて掬い取る方式(例えば、特許文献1参照。)を採用した場合、上下に隣接する収納部に収納される物品の間には移載対象の物品の底面よりも下方にフォーク突入用の空間を形成しなければならない分、上下方向での収納効率が悪くなる。また、収納部に収納されている物品の両側方の空間に左右一対のフォークを突入させて物品を挟持した状態で引き出す方式(例えば、特許文献2参照。)の場合、各物品の両側方にはフォーク突入用の空間を形成しなければならない分、棚左右方向での収納効率が悪くなる。
そこで、従来より、収納部に収納される物品の上下左右の間隔を極力小さくして物品収納棚の収納効率を高くすることができる構成として、移載手段が、物品を載置支持する載置支持部と、収納部における収納位置と載置支持部における載置位置との間で物品を移動させる移動操作装置とを備えて構成され、移動操作装置として、移載対象の物品の棚前後方向で前側の正面部に設けられた正面側被係止部に係脱自在な正面係止体を棚前後方向に移動自在に備えて、移載対象の物品を棚前後方向に移動させる正面係止式移動操作装置と、移載対象の物品の底面に接触する搬送ベルトを巻回作動自在に備えて物品を棚前後方向に移動させる底面接触式移動操作装置とを備えて構成されたものが提案されている(例えば、特許文献3参照。)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−191109号公報
【特許文献2】特開2006−160496号公報
【特許文献3】特許第3603992号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献3のものでは、正面係止体が、多段フォークの最上段のフォーク体の上部において棚前後方向に移動自在に設けられているため、フォーク体を引退位置に位置させたときのフォーク体の棚前後方向で後側(出退方向で突出側)の端部よりも棚前後方向で前方側(出退方向で引退側)に、正面係止体を位置させることができる。したがって、収納部に収納されている物品を移載手段に移載する場合、正面係止式移動操作装置により移載対象の物品を棚前後方向で十分装置内方となる位置まで移動させて、底面接触式移動操作装置の搬送ベルトの搬送作用領域として移載対象の物品の底面における棚前後方向で後側の端部から装置内方側に渡る棚前後方向で長い範囲に亘る領域を確保できる。そのため、物品の底面の広い領域に対して搬送ベルトによる搬送力が作用するので、物品に棚前後方向又は棚左右方向で偏荷重が存在していても物品を載置支持部の載置位置まで的確に移動させることができる。
しかしながら、上記特許文献3のような構成では、多段フォークの最上段のフォーク体の上部において正面係止体を棚前後方向に移動自在に設けるため、正面係止体の支持構造が複雑になってしまう。
また、最上段のフォーク体の上部に係止体が位置していることから、多段フォークの突出時の先端部の上下方向の寸法が大きくなってしまうので、正面側係止部が物品の正面部において下方側に位置している場合に、その正面側係止部に対して下方から正面係止体を係合させるためには、上下方向に大きな寸法の先端部分を物品収納棚側に突入させることができるように、物品の上下間隔を大きくしなければならない。このように、最上段のフォーク体の上部に係止体が位置していると、物品の上下高さと正面側被係止部の上下位置との関係によっては、物品の上下間隔を大きくしなければならない場合がある。
ちなみに、特許文献3のものでは、正面側被係止部に対して、上下いずれの方向からも正面係止体を係合させることができるものであるから、上下の物品の間隔を極力大きくせずに済むものであるが、物品の正面側被係止部に対して下方からしか正面係止体を係合させることができない仕様の物品である場合は、やはり、物品の上下間隔を大きくしなければならないおそれがある。
上記のような構成の複雑化と収納効率の低下の問題を回避するため、正面係止体を最上段のフォーク体の棚前後方向で棚側の先端部に固定状態で設けて、物品収納棚側に突入させる先端部分の厚みを薄くすることが考えられる。しかし、その場合、正面係止体は最上段のフォーク体を引退位置に引退させたときの位置までしか物品を移動させることができない。そのため、正面係止式移動操作装置による物品の移動が完了した後に、底面接触式移動操作装置の搬送ベルトの搬送作用領域として棚前後方向で長い範囲に亘る領域を確保できず、物品に棚前後方向又は棚左右方向で偏荷重が存在していると、底面接触式移動操作装置により物品を載置支持部の載置位置まで的確に移動させることができないおそれがある。
この問題は、収納部が棚前後方向で複数の物品を収納可能な場合には、特に顕著となる。すなわち、棚奥側の物品の移載をするためには、多段フォークの突出量を長くする必要があるが、収納効率を確保するために物品収納棚の物品の上下間隔を大きくできないという制約があると、突入する部分の厚みが制約されるため、多段フォークの段数を多く取ることができず、最上段のフォーク体の長さを長くせざるを得ない。そのため、最上段のフォーク体を引退位置まで引退させても、最上段のフォーク体の長さが長くなる分、正面係止体は載置支持部の棚前後方向で一層後側(出退方向で突出側)の位置までしか移動せず、底面接触式移動操作装置により物品を載置支持部の載置位置まで的確に移動させることができないおそれが大きくなる。
【0005】
本発明は上記実情に鑑みて為されたものであって、その目的は、収納効率を確保しつつ、構成の簡素化を図ることができながら、偏荷重のある物品でも適切に移載することが可能な物品収納設備を提供する点にある。
【課題を解決するための手段】
【0006】
この目的を達成するために、本発明に係る物品収納設備の第1特徴構成は、平面視矩形状の物品を載置支持する収納部が上下左右に並ぶ状態で配設された物品収納棚と、前記物品収納棚の前面側において走行自在で、かつ、前記収納部との間で物品を移載自在な移載手段を昇降自在に備えて構成されたスタッカークレーンとが設けられた物品収納設備において、
前記移載手段が、物品を載置支持する載置支持部と、前記収納部における収納位置と前記載置支持部における載置位置との間で物品を棚前後方向に沿って移動させる移動操作装置とを備えて構成され、前記移動操作装置として、物品の棚前後方向で前側の正面部に設けられた正面側被係止部に係脱自在な正面係止体を棚前後方向に移動自在に備えて、前記正面側被係止部に前記正面係止体を係止させた状態で、前記収納位置と、移載対象の物品における棚前後方向で前側の端部が前記載置支持部に支持され、後側の端部が前記収納部に支持される中継位置との間で、移載対象の物品を移動させる正面係止式移動操作装置と、物品の棚左右方向の両側面部に形成された縦方向に沿うリブに対して各別に係脱自在な左右一対の側面係止体を棚前後方向に移動自在に備えて、前記リブに前記側面係止体を係止させた状態で、前記中継位置と前記載置位置との間で移載対象の物品を移動させる側面係止式移動操作装置とを備えて構成されている点にある。
【0007】
本特徴構成によれば、移載手段が、物品を載置支持する載置支持部と、収納部における収納位置と載置支持部における載置位置との間で物品を移動させる移動操作装置とを備えており、移動操作装置として、物品を収納位置から中継位置に移動させる正面係止式移動操作装置と、物品を中継位置から載置位置に移動させる側面係止式移動操作装置とを備えている。したがって、正面係止式移動操作装置と側面係止式移動操作装置とが中継して、移載対象の物品を収納位置から中継位置を経て載置位置に、或いは、載置位置から中継位置を経て収納位置へと、棚前後方向に移動させることができる。
そして、正面係止式移動操作装置は、正面側被係止部に正面係止体を係止させた状態で収納位置と中継位置との間で移載対象の物品を移動させ、側面係止式移動操作装置は物品の棚左右方向の両側面部に形成された縦方向に沿うリブに対して左右一対の側面係止体を各別に係止させた状態で、中継位置と載置位置との間で移載対象の物品を移動させる。
ここで、正面係止式移動操作装置は、収納部から物品を出庫させるべく収納位置から載置位置まで物品を移動させる場合には、収納位置から中継位置まで物品の正面部に対する係止を利用して物品を移動操作し、また、収納部へ物品を入庫させるべく載置位置から収納位置まで移動させる場合には、中継位置から収納位置まで物品の正面部に対する係止を利用して物品を移動操作する。したがって、収納位置から中継位置へ移動させる場合も、中継位置から収納位置まで移動させる場合も、いずれの場合も、移載対象の物品の底面よりも下方や移載対象の物品の両側方に、物品を移動操作するフォーク等の部材を突入させることなく、正面係止式移動操作装置により物品を収納位置と中継位置との間で移動させることができる。
また、側面係止式移動操作装置は、一対の側面係止体を、移載対象の物品の棚前後方向で前側の端部が載置支持部に支持された物品における前側の端部の両側面のリブに係止させた状態で棚前後方向に移動させることで、中継位置と載置位置との間で物品を移動操作する。したがって、中継位置から載置位置へ移動させる場合も、載置位置から中継位置まで移動させる場合も、いずれの場合も、移載対象の物品の底面よりも下方や移載対象の物品の両側方に、物品を移動操作するフォーク等の部材を突入させることなく、側面係止式移動操作装置により物品を中継位置と載置位置との間で移動させることができる。
つまり、収納部から物品を出庫させるべく収納位置から載置位置まで物品を移動させる場合も、収納部へ物品を入庫させるべく載置位置から収納位置まで物品を移動させる場合も、移載対象の物品の底面よりも下方や移載対象の物品の両側方に物品を移動操作するフォーク等の部材を突入させることなく、正面係止式移動操作装置及び側面係止式移動操作装置により物品を移動操作できるので、物品の上下左右の間隔を極力小さくして物品収納棚の収納効率を確保できる。
【0008】
しかも、正面係止式移動操作装置は、収納部から物品を出庫させるべく収納位置から載置位置まで物品を移動させる場合においては、収納位置から中継位置まで物品を移動させればよく、また、収納部へ物品を入庫させるべく載置位置から収納位置まで物品を移動させる場合においては、中継位置から収納位置まで物品を移動させればよい。そのため、例えば、正面係止式移動操作装置を多段フォークに構成した場合、正面係止体を、最上段のフォーク体の上部において移動自在に設けるといったように、正面係止体を棚前後方向で正面係止式移動操作装置の装置内方側まで大きく移動させるための複雑な構成は必要なく、先の例で言えば、多段フォークのフォーク体の突出側の端部に正面係止体を固定状態で設けるだけで済むため、正面係止式移動操作装置の構成の簡素化を図ることができる。
【0009】
さらに、側面係止式移動操作装置は、一対の側面係止体を、移載対象の物品の棚前後方向で前側の端部が載置支持部に支持された物品における前側の端部の両側面のリブに係止させた状態で棚前後方向に移動させるので、移載対象の物品に偏荷重があっても、一対の側面係止体は縦方向に沿うリブに対して係止しているので、一対の側面係止体によりリブを介して物品に対して確実に搬送力を伝達することができる。そのため、側面係止式移動操作装置を物品の左右両側面部に各別に当接した状態で回動自在な一対の搬送ベルトを備えたベルト式移動操作装置にて構成した場合のように、棚左右方向で偏荷重があった場合に、一対の搬送ベルトのいずれか一方において、物品の側面部との間で滑りが発生することで、物品に対してバランスよく搬送力を伝達することができないとか、棚前後方向で偏荷重があった場合に、一対の搬送ベルトの双方において、物品の側面部との間で滑りが発生することで、物品に対して適切に搬送力を伝達することができないとかいう事態が発生することはない。したがって、偏荷重のある物品でも適切に物品を移載することができる。
ちなみに、本特徴構成では、側面係止体を上下方向に長く形成することで縦方向に沿うリブとの上下の係合量を大きく取ることができるため、物品が傾斜した場合でも、側面係止体とリブとの係合が外れることを極力回避できるが、本特徴構成のように構成せずに、係止体が物品の底面に形成された凹入部等に係脱自在な底面係止式移動操作装置を構成した場合、一般に物品の底面に形成される凹入部等の深さは物品の側面に形成された縦方向に沿うリブの長さに比べて短い(浅い)ため、係止体を物品の底面に対して上下方向に深く係入させることができず、物品が傾斜した場合に、係止体と物品の底面における凹入部等との係合が維持できないおそれがあり、好ましくない。
【0010】
このように、本特徴構成によると、収納効率を確保しつつ、構成の簡素化を図ることができながら、偏荷重のある物品でも適切に移載することが可能な物品収納設備を得るに至った。
【0011】
本発明に係る物品収納設備の第2特徴構成は、前記左右一対の側面係止体の夫々は、水平面に沿う巻回経路を形成する状態で物品の棚左右方向の長さよりも長い間隔を隔てて棚左右方向に分散配置された一対の無端回動帯の夫々に、前記巻回経路の外側に突出する状態で設けられて、前記一対の無端回動帯を回動させることにより、前記リブに対して係脱自在でかつ棚前後方向に移動自在に構成され、前記側面係止式移動操作装置は、前記一対の無端回動帯の夫々における物品存在側となる経路部分を棚前後方向に案内するガイド部材を備えて構成されている点にある。
【0012】
本特徴構成によれば、左右一対の側面係止体の夫々を、一対の無端回動帯の夫々に、巻回経路の外側に突出する状態で設けてあるので、一対の無端回動帯を水平面に沿う巻回経路に沿って巻回作動させることで、左右一対の側面係止体の夫々を水平面に沿って移動させ、リブに対して係止させて棚前後方向に移動させその後リブから離脱させることができる。
ガイド部材により一対の無端回動帯の夫々における物品存在側となる経路部分が案内されるため、側面係止体をリブに対して係止させた状態で物品を棚前後方向で移動させる場合に、側面係止体が取り付けられている無端回動帯が棚前後方向に案内されることになる。したがって、側面係止式移動操作装置にて移動操作されている物品からの反作用により側面係止体が取り付けられている無端回動体が屈曲するなどして、側面係止体がリブから離脱する事態を防止できる。このようにして、側面係止式移動操作装置にて物品を棚前後方向に移動させる場合に、無端回動体の側面係止体が連結されている部分の前後で屈曲が生じて側面係止体が物品の縦方向に沿うリブから外れてしまう事態を防止して、物品を側面係止式移動操作装置にて適切に移動操作できる。
【0013】
本発明に係る物品収納設備の第3特徴構成は、前記物品収納棚が、前記収納部の物品出し入れ用間口が互いに対向する姿勢で前記スタッカークレーンの移動用通路を形成するべく棚前後方向に間隔を隔てた状態で一対設けられ、前記移動操作装置が、前記一対の物品収納棚の夫々における前記収納部における収納位置と前記載置支持部における載置位置との間で物品を棚前後方向に沿って移動自在に構成され、前記リブとして、前記収納部から物品を取り出す場合に前記側面係止体と係合する取り出し用のリブと、これに棚前後方向で近接して前記収納部へ物品を受け渡す場合に前記側面係止体と係合する受け渡し用のリブとを一組として、物品の両側面における棚前後方向の両端部の夫々に設けられ、前記左右一対の側面係止体として、物品の両側面における前記一組のリブの棚前後方向の間隔と略同じ距離だけ各無端回動帯の経路方向で間隔を隔てた状態で二対設けられ、前記二対の側面係止体のそれぞれは、物品が前記載置支持部における前記載置位置に位置しているときに、棚前後方向で前記一組のリブの間に位置するように配置されている
点にある。
【0014】
本特徴構成によれば、一方の物品収納棚における収納部から物品を取り出す場合は、物品の両側面における棚前後方向で一方側に設けられた一組のリブのうちの取り出し用のリブに一対の側面係止体を係止させて物品を移動操作することができ、同一方の物品収納棚における収納部に物品を受け渡す場合は、物品の両側面における棚前後方向で一方側に設けられた一組のリブのうちの受け渡し用のリブに一対の側面係止体を係止させて物品を移動操作することができる。
同様に、他方の物品収納棚における収納部から物品を取り出す場合は、物品の両側面における棚前後方向で他方側に設けられた一組のリブのうちの取り出し用のリブに一対の側面係止体を係止させて物品を移動操作することができ、同他方の物品収納棚における収納部に物品を受け渡す場合は、物品の両側面における棚前後方向で他方側に設けられた一組のリブのうちの受け渡し用のリブに一対の側面係止体を係止させて物品を移動操作することができる。
このように、一対の物品収納棚のそれぞれにおける収納部との間で物品を移載できる。
そして、一対の物品収納棚における収納部から物品を取り出して、物品が載置支持部における載置位置に位置しているときには、二対の側面係止体のそれぞれが、棚前後方向で一組のリブの間に位置することになるので、無端回動体の巻回作動方向を選択することで、棚前後方向で前後何れに対しても、側面係止式移動操作装置にてそのまま移動操作できる。つまり、直前の受取動作を収納部が位置する側とは反対側の方向に移載する場合でも、側面係止体を物品の次の移載方向で後方側の端部に移動させなくても済むので、物品の移載を効率よく行うことができる。
【0015】
本発明に係る物品収納設備の第4特徴構成は、前記収納部に収納されている物品が前記収納部の物品出し入れ用間口から突出することを規制する上向き姿勢の規制用突部が、前記収納部の物品載置支持面の棚前後方向で手前側の端部に設けられ、前記スタッカークレーンの作動を制御する制御手段が、前記規制用突部の上端部よりも高い位置に前記載置支持部の載置支持面を位置させた状態で前記側面係止式移動操作装置により前記中継位置から前記載置位置に物品を移動させるべく、前記スタッカークレーンの作動を制御するように構成され、
前記載置支持部の載置支持面に弾性部材が設けられている点にある。
【0016】
本特徴構成によれば、規制用突部の上端部よりも高い位置に前記載置支持部の載置支持面を位置させた状態で前記側面係止式移動操作装置により前記中継位置から前記載置位置に物品を移動させるため、物品の棚前後方向での奥側の下端が収納部に載置支持され、物品の底面における棚前後方向で奥側端部よりも手前側箇所が載置支持部に支持された傾斜姿勢となる。そして、物品が側面係止式搬送装置にて載置位置へ向けて移動操作される途中で、当該物品は傾斜姿勢から載置支持部に載置支持された水平方向に沿う姿勢に急激に変化することになる。物品の急激な姿勢変化により、物品の底面が載置支持部の載置支持面に衝突するが、載置支持部における載置支持面に弾性部材が設けられているので、物品が載置支持面に対して衝突するときの衝撃が緩和されるとともに、衝撃音の発生も抑制される。
【0017】
本発明に係る物品収納設備の第5特徴構成は、前記載置支持部が、複数の遊転自在なローラを棚前後方向に並ぶ状態で備えたローラコンベヤにて構成され、前記弾性部材が、前記複数のローラの夫々の外周面に巻回されている点にある。
【0018】
本特徴構成によれば、載置支持部における載置支持面に弾性部材を設けることで、物品の底面との摩擦が増加することになるが、載置支持部を移載対象の物品が棚前後方向に移動されるときに物品の底面を摺動自在に支持する載置支持台にて構成すると、側面係止式移動操作装置にて物品を中継位置と載置位置との間で移動操作する際に、搬送抵抗が大きくなり、物品を適切に移動操作できないおそれがあるため好ましくない。
この点、載置支持部をローラコンベヤにて構成して、複数のローラの夫々の外周面に巻回する形態で、載置支持部の載置支持面に弾性部材を設けることで、ローラが回転することにより物品を側面係止式搬送手段にて円滑に搬送することができながら、物品が傾斜姿勢から水平方向に沿う姿勢に急激に変化して載置支持面に対して衝突するときの衝撃が緩和されるとともに、衝撃音の発生も抑制される。
なお、物品の底面とローラコンベヤとの衝突は、物品に棚前後方向で後側に荷重が偏った編荷重が存在している場合には、載置位置までの移載が完了する直前まで棚前後方向で傾斜した姿勢が続くため、衝突現象が顕著となる。
【0019】
本発明に係る物品収納設備の第6特徴構成は、前記正面係止式移動操作装置が、物品を載置支持自在に構成され、かつ、その載置支持面が前記載置支持部の載置支持面よりも低くなる下降高さと、その載置支持面が前記載置支持部の載置支持面よりも高くなる上昇高さとに昇降自在に設けられ、かつ、昇降作動により移載対象の物品の前記正面側被係止部に対して前記正面係止体を係脱自在に構成され、前記制御手段は、物品を前記収納位置から前記載置位置まで物品を移動させる場合は、前記正面係止式移動操作装置により移動される物品が前記中継位置に位置すると、前記正面係止体を前記正面側被係止部から離脱させるべく前記正面係止式移動操作装置を下降高さに下降させる離脱用下降処理を実行し、その後、前記側面係止式移動操作装置により移動される物品が前記載置位置から設定距離だけ手前の停止準備位置に位置すると、移載対象の物品を前記正面係止式移動操作装置の載置支持面にて載置支持するべく前記正面係止式移動操作装置を前記上昇高さに上昇させる載置支持用上昇処理を実行するように構成されている点にある。
【0020】
本特徴構成によれば、物品を収納位置から載置位置まで物品を移動させる場合に、正面係止式移動操作装置が載置支持部に対して下降作動することにより移載対象の物品の正面側被係止部に対して正面係止体を離脱できる。したがって、移載対象の物品の底面における棚前後方向で奥側端部よりも手前側の箇所が載置支持部に支持されかつ移載対象の物品の棚前後方向で奥側の下端部が収納部に支持される中継位置において、正面係止体を物品の正面側被係止部に対して係脱させる際には、収納部に対する載置支持部の高さを変化させることなく、つまり、スタッカークレーンを上下に昇降させることなく、正面係止式移動操作装置を載置支持部に対して昇降させれば済む。これにより、中継位置において、ローラコンベヤにて構成された載置支持部に底面が支持された状態となっている物品の姿勢を変化させることなく正面係止体を正面側被係止体から離脱させることができる。そのため、載置支持部をローラコンベアにて構成していても、正面係止体を正面側被係止体から離脱させる際に物品が移動してしまうことを極力抑制することができる。
【0021】
また、側面係止式移動操作装置による物品の移動が完了する手前で、正面係止式移動操作装置を上昇高さに上昇させることで、正面係止式移動操作装置の載置支持面が載置支持部の載置支持面よりも高くなり、正面係止式移動操作装置の載置支持面で物品が支持される。そのため、正面係止式移動操作装置の載置支持面との間で適度な摩擦力を得た状態で、側面係止体を停止させることができ、物品を停止させた位置に適切に保持することができる。したがって、載置支持部のローラコンベヤに載置支持された状態のまま側面係止体を停止させると、ローラコンベヤ上で物品が安定しないという不都合を解消できる。
【0022】
本発明に係る物品収納設備の第7特徴構成は、前記収納部が、棚前後方向に複数個の物品を収納可能に構成され、前記正面係止式移動操作装置が、棚前後方向に長尺のフォーク体を棚前後方向に出退自在に備えた多段フォークを備えて構成され、前記正面係止体が、前記フォーク体の上下厚みの範囲内に納まる状態で突出側の先端部に設けられている点にある。
【0023】
本特徴構成によれば、多段フォークにより、長尺のフォーク体を棚前後方向に出退させることで、フォーク体の突出側の先端部に取り付けられている正面係止体を棚前後方向に移動させて物品を移動操作することができる。正面係止体は、フォーク体の上下厚みの範囲内に納まっているため、フォーク体を物品収納棚の棚前後方向で棚内方側に突入させる場合に、物品収納棚において上下に隣接する物品のクリアランスが小さくても、正面係止体が移載対象外の物品の上下に位置する物品に干渉する不都合が生じ難い。そのため、収納部の上下ピッチを極力小さくすることができ、収納効率の高い物品収納設備となる。
【図面の簡単な説明】
【0024】
【図1】物品収納設備の一部正面図
【図2】物品収納設備の一部平面図
【図3】昇降台の正面図
【図4】昇降台の平面図
【図5】コンテナを取り出すときの移載装置の平面図その1
【図6】コンテナを取り出すときの移載装置の平面図その2
【図7】コンテナを取り出すときの移載装置の平面図その3
【図8】コンテナを取り出すときの移載装置の平面図その4
【図9】コンテナを取り出すときの側面係止式移動操作装置及び傾斜規制手段の作用図
【図10】コンテナを取り出すときの側面係止式移動操作装置の作用図
【図11】載置支持部及び位置変更操作手段を示す縦断側面図
【図12】側面係止式移動操作装置の説明図
【図13】制御ブロック図
【図14】取出用正面係止式移動操作処理のフローチャート
【図15】取出用側面係止式移動操作処理のフローチャート
【図16】受渡用側面係止式移動操作処理のフローチャート
【図17】受渡用正面係止式移動操作処理のフローチャート
【図18】(a)コンテナを取り出すときの正面係止体及び傾斜規制アームの位置の変化を示す図(b)コンテナを取り出すときの傾斜規制アームの位置変化を示す図
【図19】(a)コンテナを受け渡すときの正面係止体及び傾斜規制アームの位置の変化を示す図(b)コンテナを受け渡すときの傾斜規制アームの位置変化を示す図
【図20】奥棚のコンテナを取り出す場合において正面係止体を係合させるために多段フォークを上昇させるときの出退位置を示す図
【図21】コンテナを取り出す場合においてコンテナを持ち上げ状態にするために多段フォークを上昇させるときの出退位置を示す図
【図22】コンテナを取り出すときの移載装置の作動状態を示す図その1
【図23】コンテナを取り出すときの移載装置の作動状態を示す図その2
【図24】コンテナを取り出すときの移載装置の作動状態を示す図その3
【発明を実施するための形態】
【0025】
本発明に係る物品収納設備の実施形態を図面に基づいて説明する。
この物品収納設備LSは平面視矩形状の物品の一例としてコンテナCを収納保管する設備であり、図1に示すように、コンテナCを搬送するスタッカークレーン1が、走行レール2に沿って移動可能に構成され、このスタッカークレーン1の移動用通路4を挟んでその両側には物品収納棚5として、第1物品収納棚5aと第2物品収納棚5bとが設置されている。
【0026】
〔物品収納棚〕
物品収納棚5は、図1及び図2に示すように、上下方向に立設された複数本の柱部材6や水平方向に配設の複数本の棚部材7などから構成され、収納部8を上下方向及び横方向に複数並べた構造となっている。このように、物品収納棚5が、収納部8の物品出し入れ用間口が互いに対向する姿勢でスタッカークレーン1の移動用通路4を形成するべく棚前後方向に間隔を隔てた状態で一対設けられている。
【0027】
各収納部8は、図2、図3、図5〜図8及び図11に示すように、柱部材6にコンテナCを載置支持する左右一対の棚部材7が取付けられて構成され、その奥行き方向(棚前後方向)に2個のコンテナCを収納することができる。尚、以下において、収納部8における奥行き方向の2個の収納位置のうち、便宜上、手前側の位置を「手前棚」、奥側の位置を「奥棚」という場合がある。
【0028】
前記左右一対の棚部材7の夫々は、棚前後方向の前端部及び後端部に、載置支持面から上向きに突出する姿勢に折り曲げ形成された前端ストッパ17及び後端ストッパ18が設けられ、棚左右方向の収納部の外方側の側端部の棚前後方向で略全体に亘って、載置支持面から上向きに突出する姿勢に折り曲げ形成された側端ストッパ19が設けられている。したがって、各収納部8は、収納されているコンテナCが収納部8の物品出し入れ用間口から突出することを規制する上向き姿勢の規制用突部としての前端ストッパ17が、収納部8の物品載置支持面の棚前後方向で手前側の端部に、間隔を隔てて左右一対設けられている。
【0029】
〔コンテナ〕
図1に示すように、コンテナCは、内側に書籍等の収容物Wを収容可能な上部開放状態の浅い箱状体として形成され、図3、図7、図8及び図10に示すように、収納部8の収納位置に収納された状態で棚前後方向に平行となる両側面における前端部及び後端部には、側面係止式移動操作装置STが備える左右一対の側面係止体SKが係脱自在な左右一対の前側凹部21Fと左右一対の後側凹部21Rが形成されている。なお、前側凹部21F及び後側凹部21Rの名称に関しては、第1物品収納棚5aの前後に対応して定義している。
【0030】
図11にも示すように、前後の凹部21F・21Rの夫々は、一組の縦方向に沿うリブ22(22S・22R)と一組の横方向に沿うリブ23とで矩形状の外周部が形成されている。収納部8からコンテナCを取り出す場合に側面係止式移動操作装置STによりコンテナCを移動操作するときには、一組の縦方向に沿うリブ22のうち棚前後方向で外方側の取り出し用のリブ22Rに側面係止体SKが係止され、収納部8にコンテナCを受け渡す場合に側面係止式移動操作装置STによりコンテナCを移動操作するときには、一組の縦方向に沿うリブ22のうち棚前後方向で内方側の受け渡し用のリブ22Rに側面係止体SKが係止される。
【0031】
コンテナCを第1物品収納棚5aの収納部8から取り出すときは、前側凹部21Fの棚前後方向でコンテナCの外方側に位置する縦方向に沿う取り出し用のリブ22Rに後述の第1側面係止体SKaが係止される(図7及び図8参照)。一方、コンテナCを第1物品収納棚5aの収納部8へ受け渡すときは、前側凹部21Fの棚前後方向でコンテナCの内方側に位置する縦方向に沿う受け渡し用のリブ22Sに第1側面係止体SKaが係止される。つまり、第1物品収納棚5aに対する移載では、前側凹部21Fに第1側面係止体SKaが係入し、第1側面係止体SKaは一組のリブ22のうち、移載種別に応じて、前側凹部21Fを形成する取り出し用のリブ22Rや受け渡し用のリブ22Sに係止される。
【0032】
コンテナCを第2物品収納棚5bの収納部8から取り出すときは、後側凹部21Rの棚前後方向でコンテナCの外方側に位置する縦方向に沿う取り出し用のリブ22Rに後述の第2側面係止体SKbが係止される。一方、コンテナCを第2物品収納棚5bの収納部8へ受け渡すときは、後側凹部21Rの棚前後方向でコンテナCの内方側に位置する縦方向に沿う受け渡し用のリブ22Sに第2側面係止体SKbが係止される。つまり、第2物品収納棚5bに対する移載では、後側凹部21Rに第2側面係止体SKbが係入し、第2側面係止体SKbは一組のリブ22のうち、移載方向に応じて、後側凹部21Rを形成する取り出し用のリブ22Rや受け渡し用のリブ22Sに係止される。
【0033】
このように、コンテナCには、側面係止体SKが係脱自在なリブ22として、収納部8からコンテナCを取り出す場合に側面係止体SKと係合する取り出し用のリブ22Rと、これに棚前後方向で近接して配置され収納部8へコンテナCを受け渡す場合に側面係止体SKと係合する受け渡し用のリブ22Sとを一組として、コンテナCの両側面における棚前後方向の両端部の夫々に設けられている。
【0034】
図10に示すように、凹部21F・21Rの上下長さは、側面係止体SKの上下長さよりも長く形成され、凹部21F・21Rの棚前後方向の長さは、側面係止体SKの棚前後方向の長さよりも長く形成されている。なお、凹部21F・21Rの棚左右方向の深さ、つまり、リブ22・23の高さは、側面係止体SKの係入深さよりも大きくなっている。
【0035】
そして、詳しくは後述するが、側面係止体SKが、縦向きのリブ22に係止した状態で側面係止式移動操作装置STにより棚前後方向に移動操作されることで、コンテナCが移動操作される。
【0036】
図3、図9、図10及び図11に示すように、コンテナCは、互いに対向配置されて収納部8の収納位置に収納された状態で棚左右方向に平行となる前後の正面部(コンテナCの短辺側の端面部)は、棚前後方向視で、台形状の上側部分Cuと長方形状の下側部分Cdとからなる。
【0037】
コンテナCの上下中間位置には、上側部分Cuと下側部分Cdとの境界となる横向きのリブ25がコンテナ左右幅全体に亘って形成されている。このリブ25が傾斜規制手段LKにて規制作用を受ける被規制部として機能する。すなわち、移載中にコンテナCを持ち上げ状態にした場合に、棚左右方向の偏荷重のために傾斜しようとした場合に、リブ25の水平方向に沿う上面部が、作用位置となっている傾斜規制アーム57の先端部に下方から当接することで、持ち上げ状態のコンテナCの傾斜は、移載が継続可能な角度に規制されるようになっている。
【0038】
上側部分Cuには、作業者がコンテナCを取り扱う場合に把持される取っ手26が形成されている。また、図示は省略するが、コンテナCの正面部に形成された横向きのリブ25の上面には、各コンテナCを識別するためのバーコードラベルが貼付されている。
【0039】
図3、図9、図10及び図11に示すように、正面部における下側部分Cdにおける棚左右方向で中央箇所に、正面係止式移動操作装置FTが備える一対の正面係止体FKが係脱する正面側被係止部24が形成されている。正面側被係止部24は、コンテナCの内壁と平行に配置され、これらの間に位置する左右2枚の縦向きのリブと上側1枚の横向きのリブとで、内壁の外面に沿った偏平形状の開口を下部に備えた袋状の係入空間Z1を形成している。コンテナCの内壁の外面の、係入空間Z1の下方側部分は、一対の正面係止体FKが棚前後方向で奥側に押し当てられる被押当部分Z2となっている。
【0040】
そして、詳しくは後述するが、正面係止式移動操作装置FTが、正面側被係止部24を棚前後方向で奥側に移動させてコンテナCの正面部における被押当部分Z2に押し当ててから上昇させることで、正面側被係止部24を係入空間Z1に係入させ、その状態で正面側被係止部24を棚前後方向で移動させることで、コンテナCを移動操作する。
【0041】
このコンテナCでは、上述のように、左右一対の側面係止体SKが係脱する左右一対の凹部として、前側凹部21Fと後側凹部21Rとの双方を備え、一対の正面係止体FKが係脱する正面側被係止部24を、前後に対向する正面部のいずれにも備えている。つまり、コンテナCは、側面側被係止部や正面側被係止部を左右及び前後に対称に備えていることにより、第1物品収納棚5a及び第2物品収納棚5bとの間で、また、収納部8の奥側及び手前側との間で、コンテナCの前後関係が入れ替ってもそのままスタッカークレーン1によるコンテナCの取り扱いが可能となっている。なお、コンテナCの側面側被係止部や正面側被係止部としては、前側凹部21F及び後側凹部21R並びに正面側被係止部24の構成に限らず、左右一対の側面係止体SKや正面係止体FKが係止可能となる他の形状、例えば、コンテナCが各格納部8に収納できる範囲内でコンテナC本体部分から外方へ突出させたものとしてもかまわない。
【0042】
〔スタッカークレーン〕
スタッカークレーン1は、物品収納棚5に対する物品搬出入部(図示せず)と各物品収納棚5の収納部8との間でコンテナCを搬送するもので、そのため、移動用通路4に沿って走行自在な走行台車3と、上下方向に沿って昇降自在な昇降台13とを備え、且つ、この昇降台13には移載手段としての移載装置CTを備えている。
【0043】
なお、物品搬出入部は、一方の物品収納棚5の端部外方箇所に設けられた搬入部コンベヤと他方の物品収納棚5の棚左右方向の端部よりも外方側の箇所に設けられた搬出部コンベヤとが独立して備えられている。
【0044】
走行台車3は、走行モータM1により回転駆動される駆動輪11aと、遊転自在な従動輪11bとを走行方向で前後の端部に備え、棚前面側で走行レール2上を移動用通路4に沿って走行する。
【0045】
走行台車3の前後端部には、前後一対の昇降マスト10が立設されており、上端部が上部フレーム14にて連結され、この上部フレーム14が備える縦軸心の複数の上部ガイドローラ12uが上部レール15の両側面に当接する状態で、上部フレーム14が上部レール15に走行方向に移動自在に係合している。前後一対の昇降マスト10の対向する側面部の夫々には、上下方向に沿って左右一対の昇降台案内用の凹溝が形成されている。
【0046】
昇降台13は、昇降マスト10の各側面部に当接する前後位置案内用のガイドローラ12aと昇降マスト10の各側面部に形成された前記一対の案内用凹溝に係入する左右位置案内用の一対のガイドローラ12bを異なる高さに上下一組ずつ備えている。そして、昇降台13は、一対の昇降ワイヤ16により吊り下げ支持されており、昇降モータM2により一対の昇降ワイヤ16を図外の巻取ドラムにて巻取り及び繰り出すことで、前後一対の昇降マスト10に案内されながら昇降駆動される。
【0047】
このように、物品収納設備LSは平面視矩形状の物品としてのコンテナCを載置支持する収納部8が上下左右に並ぶ状態で配設された物品収納棚5と、物品収納棚5の前面側において走行自在で、かつ、収納部8との間でコンテナCを移載自在な移載手段としての移載装置CTを昇降自在に備えて構成されたスタッカークレーン1とが設けられた物品収納設備となっている。
【0048】
〔移載装置〕
移載装置CTは、図2及び図3に示すように、コンテナCを載置支持する載置支持部MSと、突出側の先端部に正面係止体FKを固定状態で備えた多段フォークFDにて構成された正面係止式移動操作装置FTと、棚横幅方向で左右一対(スタッカークレーン1の走行方向で前後一対)の側面係止体SKを備えた側面係止式移動操作装置STとを備えて構成されている。
【0049】
正面係止式移動操作装置FTと、側面係止式移動操作装置STとは協働して、移載装置CTにおいて載置支持部MSがコンテナCを載置支持する載置位置と、それの外方側に位置する外方位置、すなわち移動用通路4の両側の収納部8における棚前後方向に隣接する2つの収納位置、並びに、搬入部コンベヤにおける搬送終端部及び搬出部コンベヤにおける搬送始端部との間でコンテナCを移載する。つまり、移載装置CTは、収納部8における収納位置と載置支持部MSにおける載置位置との間でコンテナCを移動させる移動操作装置Tとして、正面係止式移動操作装置FTと、側面係止式移動操作装置STとを備えている。移動操作装置Tは、収納部8における前端ストッパ17の上端部よりも高い位置に載置支持部MSの載置支持面を位置させた状態で、コンテナCを棚前後方向に移動操作する。
【0050】
〔載置支持部〕
載置支持部MSは、図3〜図7及び図10に示すように、正面係止式移動操作装置FTの棚左右方向で両側に分散配置された左右一対のローラコンベヤ27にて構成されている。ローラコンベヤ27は、複数のローラ28を棚前後方向に並ぶ状態でコンベヤフレーム29に横軸心周りに遊転自在に軸支させて構成されたフリーローラ式のコンベヤとなっている。コンベヤフレーム29は昇降台13に固定状態で取り付けられている。
【0051】
図11に示すように、ローラコンベヤ27における各ローラ28の外周面には、弾性部材としてのウレタンゴムシート30が巻回されている。ウレタンゴムシート30は、ローラ28の回転軸心方向の略全体に亘る長さの筒状体にて形成されている。これにより、移載対象のコンテナCを収納部8から取り出す場合に、コンテナCの底面が載置支持部MSの上端部に衝突する際の衝撃を緩和し、その衝突による騒音を抑制している。
【0052】
移載装置CTは、移載対象の収納部8について設定された移載用位置に位置した状態(前端ストッパ17の上端部よりも設定量だけ高い位置に載置支持部MSの載置支持面を位置させた状態)で、コンテナCを移載する。収納部8からコンテナCを取り出す場合においてコンテナCが中継位置(図21及び図23(f)に示す位置)から載置位置(図24(i)に示す位置)まで移動操作される間(図22〜図24において(f)〜(i)に示す期間)は、コンテナCの底面部は載置支持部MSにて支持されることになるが、コンテナCの底面とローラコンベヤ27との衝突は、コンテナCの棚前後方向で後側がローラコンベヤ27の端部に支持された状態で側面係止式移動操作装置STにて棚前後方向で前側に移動操作されているときに、コンテナCの棚前後方向で前側部分がローラコンベヤ27の載置支持面から浮上にした姿勢(図24(g)に示す姿勢)から、水平方向に沿う姿勢(図24(h)に示す姿勢)に急激に変化するときに発生する。コンテナCに収容されている収容物Wのために棚前後方向で後側に荷重が偏っている場合には、載置位置までの移載が完了する直前まで棚前後方向で傾斜した姿勢が維持され易いため、衝突現象が顕著となる。
【0053】
図10及び図12(b)に示すように、コンテナCの左右両側面の下端部を棚前後方向に案内する下部案内体37が昇降台13に固定状態で一対設けられている。下部案内体37は、板状部材を折り曲げ加工した屈曲断面形状の長尺部材にて構成され、ローラコンベヤ27のフレームに棚前後方向の複数箇所でネジ止めされている。下部案内体37の棚前後方向の両端部には、縦軸心周りに遊転自在なガイドローラ38が配設されている。これにより、移動操作装置TにてコンテナCが棚前後方向に移動操作される際に、棚横幅方向の位置が案内されるので、特に、側面係止式移動操作装置STにてコンテナCを移動操作する場合に、左右一対の側面係止体SKがコンテナCの左右の凹部から離脱することを防止できる。
【0054】
〔正面係止式移動操作装置〕
正面係止式移動操作装置FTは、図3〜図7に示すように、棚前後方向に長尺のフォーク体としての第4フォーク34を棚前後方向に出退自在に備えた多段フォークFDを備えて構成されている。多段フォークFDは、昇降台13に固定状態で取り付けられた第1フォーク31と、第1フォーク31に対して棚前後方向にスライド移動自在に取り付けられた第2フォーク32と、第2フォーク32に対して棚前後方向にスライド移動自在に取り付けられた第3フォーク33と、第3フォーク33に対して棚前後方向にスライド移動自在に取り付けられた第4フォーク34とが備えられ、第4フォーク34の突出側の先端に、一対の正面係止体FKが棚左右方向に間隔を開けて固定状態で取り付けられている。
【0055】
第1フォーク31、第2フォーク32、第3フォーク33及び第4フォーク34はいわゆるスライドフォーク機構を構成しており、図3等では図示を省略するが、サーボモータにて構成されたフォーク出退モータM3(図13参照)によって第1フォーク31に対して第2フォーク32をスライド駆動することで、図示しない連係機構によって第4フォーク34が突出並びに引退作動する。
【0056】
図3に示すように、第2フォーク32の下面には、棚前後方向で異なる位置に一対のドグ板35が垂設されており、第1フォーク31の上面には、一対のドグ板35に対応して一対の引退位置検出センサ36が設けられている。そして、後述するクレーンコントローラH(図13参照)が、一対の引退位置検出センサ36の検出情報の組み合わせから多段フォークFDが引退位置であることが判別できるようになっている。
【0057】
このように、正面係止式移動操作装置FTは、コンテナCの棚前後方向で前側の正面部に設けられた正面側被係止部24に係脱自在な正面係止体FKを棚前後方向に移動自在に備えて、正面側被係止部24に正面係止体FKを係止させた状態で、収納位置と、移載対象のコンテナCにおける棚前後方向で前側の端部が載置支持部MSに支持され、後側の端部が収納部8に支持される中継位置との間で、移載対象のコンテナCを移動させることができるようになっている。
【0058】
また、多段フォークFDは、載置支持部MSに対して昇降自在に支持されている。これにより、正面係止体FKが昇降自在となっている。多段フォークFDの支持構造の詳細は図示を省略するが、多段フォークFDは、棚前後方向の前後2箇所において、第1フォーク31の底面と昇降台13との間に配置されて多段フォークFDを上下方向に沿って昇降案内する前後一対の直動案内機構により昇降自在に支持されている。前後一対の直動案内機構の棚前後方向で中間には、ラックアンドピニオンにて構成された昇降操作手段UDが配置されており、ピニオンギヤを回転駆動するサーボモータにて構成されたフォーク昇降モータM4が昇降台13に取り付けられている。
【0059】
このような構成により、フォーク昇降モータM4を正逆に回転作動させることにより、正面係止体FKを備えた多段フォークFDとフォーク出退モータM3とが一体的に昇降駆動される。したがって、正面係止体FKは昇降自在に設けられており、正面係止体FKを載置支持部MSに対して昇降操作する昇降操作手段UDが設けられている。
そして、正面係止式移動操作装置FTは、コンテナCを載置支持自在に構成され、その載置支持面が載置支持部MSの載置支持面よりも低くなる下降高さ(後述する下降高さH0)と、その載置支持面が載置支持部MSの載置支持面よりも高くなる上昇高さ(後述する第1上昇高さH1〜第4上昇高さH)とに昇降自在に設けられ、かつ、正面係止式移動操作装置FTが載置支持部MSに対して昇降することにより移載対象のコンテナCの正面側被係止部24に対して正面係止体FKを係脱できるようになっている。
【0060】
正面係止式移動操作装置FTは、後述するクレーンコントローラHにてフォーク昇降モータM4の駆動が制御されることで、収納位置に位置するコンテナC及び中継位置に位置するコンテナCにおける正面側被係止部24に対して、正面係止体FKを係脱自在に構成されている。
【0061】
一対の正面係止体FKの夫々は、板状部材を折り曲げ形成して構成されており、棚前後方向で後側(突出方向で突出側)に位置する立ち上がり部の高さは、正面係止体FKが第4フォーク34の上下厚みの範囲内に納まるような高さとなっている。したがって、正面係止体FKは、第4フォーク34の上下厚みの範囲内に納まる状態で突出側の先端部に設けられている。そのため、第4フォーク34の上面が、正面係止式移動操作装置FTの載置支持面となっており、正面係止式移動操作装置FTが上記下降高さH0に位置すると、第4フォーク34の載置支持面が載置支持部MSの載置支持面よりも低くなる。
【0062】
第4フォーク34の棚前後方向で反対側の先端部にも同様に一対の正面係止体FKが固定状態で取り付けられており、正面係止式移動操作装置FTは、フォーク出退モータM3の回転方向を切り換えることで、多段フォークFDの突出方向を切換自在に構成されているため、第1物品収納棚5a及び第2物品収納棚5bのいずれの物品収納棚5における収納部8に対しても、正面係止体FKを棚前後方向に移動させることができる。
【0063】
一対の正面係止体FKの設置間隔は、図5〜図7及び図9に示すように、コンテナCの正面部に形成された係入空間Z1に双方の正面係止体FKが係入できるように設定されている。そして、図9において仮想線で示すように、移載中に収容物Wの偏荷重によりコンテナCが傾斜した場合でも、後述する傾斜規制アーム57により傾斜が規制されて、一対の正面係止体FKの双方の立ち上がり部の先端が係入空間Z1に係入した状態が維持されることで、コンテナCが傾斜しても移載が継続可能となっている。
【0064】
〔側面係止式移動操作装置〕
側面係止式移動操作装置STは、図7、図8及び図10に示すように、コンテナCの左右両側面に形成された縦向きのリブ22に対して各別に係脱自在な左右一対の側面係止体SKを棚前後方向に移動自在に備えて、リブ22に側面係止体SKを係止させた状態で、中継位置と載置位置との間で移載対象のコンテナCを移動させる。
【0065】
左右一対の側面係止体SKの夫々は、図8〜図10に示すように、水平面に沿う巻回経路を形成する状態でコンテナCの棚左右方向の長さよりも長い間隔を隔てて棚左右方向に分散配置された一対の環状チェーンCHの夫々に、巻回経路の外側に突出する状態で設けられている。説明を加えると、側面係止体SKは、図12(a)〜(c)に示すように、二股に分岐する連結部20を備えており、連結部20の二股の先端に形成された係合孔に環状チェーンCHの隣接ピースのピン54Pが、ブッシュ等を介して回転自在に挿通している。つまり、環状チェーンCHの側面係止体SKが連結された部分には、ローラ55に代えて連結部20が設けられている。
【0066】
なお、環状チェーンCHの側面係止体SKが連結されている部分では、連結部20の二股先端部に挿通するピン54P及びこれらに隣接する一対のピン54の合計4本のピンが、外側プレートよりも下方に延出されており、その延出部分に後述するガイド部材Gを構成する下部ガイド50の細溝49に係合するガイドローラ56が遊転自在に設けられている。
【0067】
環状チェーンCHの夫々は、縦軸心の3つのスプロケット40により巻回案内されて巻回経路が形成されており、その巻回経路の棚前後方向で一方側の端部(第1物品収納棚5a側の端部)に配置された従動スプロケット40fと、他方側の端部(第2物品収納棚5b側の端部)に配置された駆動スプロケット40dとの間には、これらのスプロケット40f・40dとは棚左右方向で異なる位置でかつ棚前後方向で従動スプロケット40fに近い箇所にテンションスプロケット40tが配置されている。
【0068】
テンションスプロケット40tは棚左右方向での位置を変更調節自在に設けられている。すなわち、調整用ボルト39(図3参照)に対する軸心方向での螺合位置を変更することによりテンションスプロケット40tの棚左右方向での位置を変更して、環状チェーンCHの張力を調整できるようになっている。従動スプロケット40fは、図11に示すように、棚前後方向で昇降台13の一方側の端部に配置された支持部材41にて上向きに立設する状態で取り付けられた円筒状の軸部材42の下端部に、遊転自在に軸支されている。
【0069】
一対の環状チェーンCHの夫々についての駆動スプロケット40dは、図11に示すように、棚前後方向で昇降台13の他方側の端部に配置された上下一対の軸受け43にて上下方向に沿う姿勢で回転自在に支持された駆動軸44の上端部に、駆動スプロケット40dのボス部に形成されたキー45が係合することにより、駆動スプロケット40dと駆動軸44とが一体回転自在に取り付けられている。図3、図9及び図10に示すように、駆動軸44の下端部には、ベベルギヤ46が取り付けられており、一対の環状チェーンCHの夫々についての駆動軸44は、左右一対の軸受9により回転自在に支持されてチェーン駆動モータM5により回転駆動されるドライブシャフト47とその両端のベベルギヤ48により連動連結されている。これにより、チェーン駆動モータM5の回転駆動力が一対の環状チェーンCHの夫々についての駆動スプロケット40dに分配入力されるようになっている。
【0070】
そして、一対の環状チェーンCHを、サーボモータにて構成されたチェーン駆動モータM5により正逆に巻回駆動することにより、巻回経路のうちコンテナCの存在側となる直線経路部分では、一対の側面係止体SKを棚前後方向に移動させることができ、巻回経路のうち棚前後方向で端部となる箇所では、一対の側面係止体SKを巻回経路の曲線形状に沿って移動させることができるようになっている。
【0071】
これにより、コンテナCの両側面における前後の凹入部21F・21Rを形成する縦向きのリブ22に対して一対の側面係止体SKを係止させた状態でコンテナCを棚前後方向に移動させることができ、また、前後の凹入部21F・21Rにおける縦向きのリブ22に対して一対の側面係止体SKを係脱させることができるようになっている。
【0072】
側面係止式移動操作装置STは、クレーンコントローラHにてチェーン駆動モータM5の駆動が制御されることで、中継位置にコンテナCが位置している状態においてリブ22に対して側面係止体SKを係脱自在に構成されている。
【0073】
図4及び図8に示すように、一対の環状チェーンCHの夫々には、左右一対の側面係止体SKとして、第1物品収納棚5aに対する移載用の第1側面係止体SKaと第2物品収納棚5bに対する移載用の第2側面係止体SKbが設けられている。第1側面係止体SKaと第2側面係止体SKbとは、コンテナCの左右一対の前側凹部21F及び左右一対の後側凹部21Rにおける縦方向に沿うリブ22の棚前後方向の間隔と略同じ距離だけ各環状チェーンCHの経路方向で間隔を隔てた状態で設けられている。すなわち、左右一対の側面係止体SKとして、コンテナCの左右両側面におけるリブ22の棚前後方向の間隔と略同じ距離だけ各環状チェーンCHの経路方向で間隔を隔てた状態で二対設けられている。そして、図8に示すように、二対の側面係止体SKa・SKbの合計4の側面係止体SKのそれぞれは、コンテナCが載置支持部MSにおける載置位置に位置しているときに、棚前後方向で一組のリブ22(取り出し用のリブ22R及び受け渡し用のリブ22S)の間に位置するように、各環状チェーンCHに取り付けられている。
【0074】
説明を加えると、4つの側面係止体SKの環状チェーンCHの経路方向での設置間隔は、第1物品収納棚5aからコンテナCを取り出すとき(図7及び図8参照)に第1側面係止体SKaが係止される縦方向に沿う取り出し用のリブ22Rと、第2物品収納棚5bからコンテナCを取り出すときに第2側面係止体SKbが係止される縦方向に沿う取り出し用のリブ22Rとの間隔よりも狭く、かつ、第1物品収納棚5aにコンテナCを受け渡すときに第1側面係止体SKaが係止される縦方向に沿う受け渡し用のリブ22Sと、第2物品収納棚5bにコンテナCを受け渡すときに第2側面係止体SKbが係止される縦方向に沿う受け渡し用のリブ22Sとの間隔よりも広く設定されている。
【0075】
このような構成により、コンテナCが移載手段Cにおける載置支持部MSの載置位置に位置する場合には、前後二対の側面係止体SKは、図8に示すように、左右一対の前側凹部21F及び左右一対の後側凹部21Rに係入した状態となる。
【0076】
図5〜図10に示すように、側面係止式移動操作装置STは、一対の環状チェーンCHの夫々における物品存在側となる経路部分を案内するガイド部材Gを、一対の環状チェーンCHの夫々に対応して棚左右方向で左右一対備えて構成されている。図12(a)及び(b)に示すように、左右の各ガイド部材Gは、上向き開口の細溝49が棚前後方向に沿って形成された棚前後方向に長尺の下部ガイド50と、棚左右方向で細溝49の物品非存在側の立面よりも物品存在側に突出する当接片51を備えた棚前後方向に長尺の側部ガイド52とからなり、昇降台13にブラケット53等により固定状態で支持されている。
【0077】
下部ガイド50は、環状チェーンCHの物品存在側となる経路部分の下方に配置されている。環状チェーンCHの物品存在側となる経路部分は、棚前後方向に沿う直線状部分と、その両端に位置するスプロケット40に巻き掛けられた曲線状部分とからなっている。そのため、環状チェーンCHの経路部分の曲線状部分の形状に合わせるべく、下部ガイド50の前後の端部50Tにおける細溝49の巻回経路内側の案内立面は、湾曲形状に形成されている。
【0078】
側部ガイド52は、棚前後方向で駆動スプロケット40dと従動スプロケット40fとの間に配置され、下部ガイド50の細溝49にて棚前後方向に沿って直線状に案内される環状チェーンCHのローラ55及び側面係止体SKの連結部20が位置する高さに当接片51の先端部が位置するように配置されている。
【0079】
このような構成により、環状チェーンCHが水平面内で巻回作動することで、環状チェーンCHの側面係止体SKが連結されている部分に設けられたガイドローラ56が下部ガイド50の端部50Tから細溝49に係入し、その後、巻回作動が進行するにつれて、側面係止体SKが連結されている部分の下部が下部ガイド50にて棚前後方向に案内される状態となり、この状態では、環状チェーンCHのローラ55及び側面係止体SKの連結部20が側部ガイド52にて棚左右方向で巻回経路の内方側にずれることが規制されことになる。このようにして、側面係止式移動操作装置STにてコンテナCを棚前後方向に移動させる場合に、環状チェーンCHの側面係止体SKが連結されている部分の前後でチェーンの屈曲が生じて側面係止体SKがコンテナCの縦方向に沿うリブ22から外れてしまう事態を防止している。
【0080】
〔傾斜規制アーム〕
図9及び図11に示すように、収納部8における収納位置と載置支持部MSの載置位置との間で移載対象のコンテナCを移動させる場合において、移載対象のコンテナCの正面側被係止部24に正面係止体FKを係合させた後、正面係止体FKが上昇操作されることで、当該コンテナCの棚前後方向で奥側の下端部が収納部8に支持されかつ当該コンテナCの棚前後方向で手前側の下端部が浮上した持ち上げ状態にするときに、当該コンテナCの移載方向視で移載対象のコンテナCが傾斜することを規制する傾斜規制手段LKが、移載装置CTに設けられている。
【0081】
移載装置CTは第1物品収納棚5a及び第2物品収納棚5aの収納部8に対して移載自在であり、傾斜規制手段LKについても、第1物品収納棚5aの収納部8に対してコンテナCを移載するときにコンテナCの移載方向視で移載対象のコンテナCが傾斜することを規制する第1の傾斜規制手段LKと、第2物品収納棚5bの収納部8に対してコンテナCを移載するときにコンテナCの移載方向視で移載対象のコンテナCが傾斜することを規制する第2の傾斜規制手段LKとを備えているが、両者は同様の構成なので、以下、第1の傾斜規制手段LKについて説明する。
【0082】
傾斜規制手段LKは、移載対象のコンテナCが傾斜したときに当該コンテナCにおける横向きのリブ25の水平方向に沿う上面部に上方から当接することで移載対象のコンテナCの傾斜を規制する規制部材として、図9に示すように、リブ25の上面部のうち、コンテナCの正面側被係止部24の棚左右方向で一方側の外方に位置する部分に対して規制作用する一方側規制部材としての傾斜規制アーム57と、リブ25の上面部のうち同他方側の外方に位置する部分に対して規制作用する他方側規制部材としての傾斜規制アーム57との左右一対の傾斜規制アーム57を備えている。傾斜規制アーム57は、平面視で湾曲した板状部材にて構成されており、その上面には、補強用の突条が幅方向中央部においてアームの湾曲形状に沿って設けられている。
【0083】
図4〜図6及び図11に示すように、傾斜規制アーム57は、作用部としての先端部が、移動操作装置Tにより棚前後方向に移動操作されるコンテナCのリブ25の上方において平面視で重複する取り出し用作用位置Pr1〜Pr2(図18(b)参照)及び受け渡し用作用位置Ps1〜Ps2(図19(b)参照)と、移動操作されるコンテナCに干渉しない退避位置P0(図18(b)及び図19(b)参照)とに水平面に沿って位置変更自在に構成されている。なお、本実施形態では、取り出し用作用位置Pr1〜Pr2と受け渡し用作用位置Ps1〜Ps2を同じ範囲P1〜P2に設定しているが、これらの範囲を各別に設定してもよい。
【0084】
移載対象のコンテナCが図9において仮想線で示すように傾斜したときには、リブ25のうち当該傾斜により上方に変移する側の被規制部が、傾斜規制アーム57の先端部に当接する。コンテナCの傾斜時にリブ25の上面部に当接することになる各傾斜規制アーム57の先端部の下面側には、弾性部材としての樹脂材料にて形成された保護シート58が装着されている。図5、図6及び図11に示すように、保護シート58は、取り出し用作用位置の始点Pr1(受け渡し用作用位置の終点Ps2)に傾斜規制アーム57が位置する状態で傾斜規制アーム57の先端部の端面からコンテナC側に僅かに膨出する状態で装着されている。これにより、コンテナCのリブ25の上面部及び正面部のリブ25より上方の部分が傾斜規制アーム57により損傷されること防止している。
【0085】
一対の傾斜規制アーム57を位置変更操作する位置変更操作手段ADが設けられており、一対の傾斜規制アーム57は、移動操作装置Tにより棚前後方向に移動操作されるコンテナCの移動経路の棚左右方向で外方側に設定されたY1・Y2周りに揺動することで、上記作用位置Pr1〜Pr2・Ps1〜Ps2と上記退避位置P0との間で位置変更自在となっており、先端部を揺動端部として、その先端部の揺動半径が変更調節自在に構成されている。
【0086】
傾斜規制アーム57を位置変更操作する位置変更操作手段ADについて説明する。図5、図6及び図9に示すように、位置変更操作手段ADは、一対の傾斜規制アーム57の夫々について各別に設けられており、駆動源であるアーム駆動モータM6も各別に設けられ、後述のクレーンコントローラHにより独立して制御される。以下、一方(図5、図6及び図9で右側)の傾斜規制アーム57についての位置変更操作手段ADについて説明する。
【0087】
図5、図6、図9及び図11に示すように、位置変更操作手段ADは、傾斜規制アーム57の揺動基部が下方側箇所に溶着されたボス59の上方側箇所に水平方向に突出する状態で溶着された連結片60の突端部と、縦軸心Y3周りに回転駆動される回転翼61の一方の端部とが、連結ロッド62の両端部に枢支連結されて構成されている。回転翼61は、アーム駆動モータM6に接続された減速機63の縦軸心Y3の出力軸64と一体回転するボス65に溶着されており、アーム駆動モータM6により回転駆動される。
【0088】
ボス59は、環状チェーンCHの従動スプロケット40fを軸支する軸部材42の上部に嵌挿されて縦軸心Y1周りに回転自在に軸支されている。なお、回転翼61の他方の端部には、第2の傾斜規制手段LKについての一方の傾斜規制アーム57を位置変更操作する位置変更操作手段ADにおける連結ロッド62が接続されている。また、第2の傾斜規制手段LKについての一方の傾斜規制アーム57の基端部が溶着されたボス59は、環状チェーンCHの駆動スプロケット40dを回転駆動する軸部材44と同一軸心となる状態で、駆動スプロケット40dの上方において回転自在に軸支されている。
【0089】
連結ロッド62は、雄ネジ部を有する連結部材62Tを、ロッド本体62Cの両端に形成された雌ネジ部の夫々に螺入させて構成されたターンバックル式に構成されており、その長さが調節自在となっている。これにより、傾斜規制アーム57の先端部の揺動半径が変更調節自在に構成されている。
【0090】
図11に示すように、減速器63の縦軸心の出力軸64の上端部には、傾斜規制アーム57の取り出し用作用位置の始点Pr1(受け渡し用作用位置の終点Ps2)及び取り出し用作用位置の終点Pr2(受け渡し用作用位置の始点Ps1)並びに退避位置P0を検出するための上下一組の検出板67U・67Dが設けられている。検出板67U・67Dは、いずれも外周部において円周方向に沿う扇状に形成されており、出力軸64により夫々が備える切欠の位相差を維持したまま一体回転する。
【0091】
一対のアーム位置検出用センサ66a・66bは、フォトマイクロスイッチにて構成されており、棚前後方向に並ぶ状態で、検出部を互いに対向させる姿勢で設けられている。棚前後方向で前側(第1物品収納棚5a側)に配置されたアーム位置検出用第1センサ66aは、縦方向に検出光軸を1本備え、上段検出板67Uの扇状部を検出する。棚前後方向で後側(第2物品収納棚5b側)に配置されたアーム位置検出用第2センサ66bは、縦方向に検出光軸を2本備え、下段検出板67Dの半径方向に2段階の深さで形成された扇状部の夫々を検出する。
【0092】
そして、後述するクレーンコントローラHが、プログラム形式で構成されたアーム位置判別部J2(図13参照)を機能させて、一対のアーム位置検出用センサ66a・66bの検出情報の組み合わせから、上下一組の検出板67U・67Dの回転位相を判別することで、傾斜規制アーム57が作用位置の始点及び終点Pr1・Pr2(Ps1・Ps2)や退避位置P0に位置しているか否かを判別できるようになっている。
【0093】
〔コンテナ位置検出センサ〕
図10及び図11に示すように、移載装置CTの棚前後方向で中央箇所及び前後両端箇所の3箇所に、移載中のコンテナCの棚前後方向の位置を検出するコンテナ位置検出用センサ68が設けられている。コンテナ位置検出用センサ68は、投光器及び受光器を備えた投受光式の光センサにて構成され、棚前後方向の複数箇所に配置されたブラケット69により支持される左右のセンサ取付レール70に投光器及び受光器が夫々取り付けられている。センサ取付レール70には、棚前後方向に沿う取付用の溝が形成されており、各コンテナ位置検出用センサ68を棚前後方向の任意の位置で支持できるようになっている。これにより、各コンテナ位置検出用センサ68は、棚前後方向の位置が調節自在となっている。
【0094】
コンテナ位置検出用センサ68は棚左右方向の水平向きの検出光を投射する投光部とこの検出光を受光する受光部とを備えて、検出光の有無により、コンテナCの存否を検出する。3つのコンテナ位置検出用センサ68のうち、棚前後方向で中央に位置する中央センサ68cは、上述の側面係止式移動操作手段STの環状チェーンCHの巻回作動速度の高速・低速の切換タイミングの検出用である。
【0095】
棚前後方向で後側(第1物品収納棚5a側)に位置する第1センサ68aは、第1物品収納棚5aの収納部8へコンテナCを受け渡す出す場合に、コンテナCが中継位置に位置するタイミングの検出用であり、かつ、第2物品収納棚5bの収納部8からコンテナCを取り出す場合に、コンテナCが載置位置に位置するタイミングよりも設定時間手前のタイミングの検出用である。
【0096】
棚前後方向で前側(第2物品収納棚5b側)に位置する第2センサ68bは、第2物品収納棚5bの収納部8へコンテナCを受け渡す出す場合に、コンテナCが中継位置に位置するタイミングの検出用であり、かつ、第1物品収納棚5aの収納部8からコンテナCを取り出す場合に、コンテナCが載置位置に位置するタイミングよりも設定時間手前のタイミングの検出用である。
【0097】
〔制御構成〕
スタッカークレーン1には、正面係止式移動操作装置FT及び側面係止式移動操作装置STの作動含めてスタッカークレーン1の作動を制御するクレーンコントローラHが設けられている。クレーンコントローラHは、図13に示すように、上述した走行モータM1、昇降モータM2、フォーク出退モータM3、フォーク昇降モータM4、チェーン駆動モータM5、一対のアーム駆動モータM6の駆動を制御する。また、クレーンコントローラHは、上述した、各位置変更操作手段ADの夫々についての一対のアーム位置検出用センサ66a・66b(図13では一つの位置変更操作手段ADのものだけ記載している。)や、コンテナ位置検出用センサ68としての中央センサ68c並びに第1センサ68a及び第2センサ68bのほか、フォーク下限位置検出センサ71や一対のフォーク引退位置検出センサ36といった各部のセンサの検出情報が入力される。なお、図8では、走行台車3の走行位置を検出する走行位置検出センサや昇降台13の昇降位置を検出する昇降位置検出センサ、各種モータへの電力を制御するインバータやサーボアンプなどは省略している。
【0098】
クレーンコントローラHは、収納部8と移載装置CTとの間でコンテナCの移載を行うにあたり、移載対象の収納部8について設定された移載用位置に移載装置CTを位置させるべく、走行用モータM1により走行駆動する走行台車3の走行作動及び昇降台13の昇降作動(昇降モータM2による駆動)を制御する。移載用位置は、走行方向(棚左右方向)では、移載装置CTの中央位置と移載対象の収納部8の中央位置とが一致し、かつ、昇降方向(棚上下方向)では収納部8の前端ストッパ17の上端部よりも設定量だけ高い位置に載置支持部MSの載置支持面が位置する高さに設定されている。
【0099】
そして、収納部8からコンテナCを取り出す場合も、収納部8へコンテナCを受け渡す場合も、クレーンコントローラHは、移載装置CTを、収納部8についての移載用位置に位置させた状態のまま移動操作装置T及び昇降操作手段UD並びに位置変更操作手段ADの作動を制御する。なお、以下の説明では、第1物品収納棚5aの収納部8に対する移載動作を例に、クレーンコントローラHによる移載装置Cの制御動作を説明する。
【0100】
〔移動操作装置の制御〕
クレーンコントローラHは、移動操作装置TによるコンテナCの移動範囲のうち収納位置(奥棚及び手前棚)と中継位置(図21及び図22(f)に示す位置)との間で移載対象のコンテナCを正面係止式移動操作装置FTにて棚前後方向に移動させるべく、フォーク出退モータM3及びフォーク昇降モータM4の作動を制御する正面係止式移動操作処理を実行し、移動操作装置TによるコンテナCの移動範囲のうち中継位置と載置位置(図8及び図24(i))との間で移載対象のコンテナCを側面係止式移動操作装置STにて棚前後方向に移動させるべく、チェーン駆動モータM5の作動を制御する側面係止式移動操作処理を実行する。
【0101】
コンテナCを収納部8から取り出すべく収納位置から載置位置にコンテナCを移動させる場合は、正面係止式移動操作装置FTによりコンテナCを棚前後方向に移動(図18(a)でFr5〜Fr6に示す動きであり図20〜図21及び図22(c)〜図23(e)に示す動きである。)させた後に、正面係止体FKを正面側被係止部24から離脱させるべく、昇降操作手段UDにより正面係止式移動操作装置FTを第4上昇高さH4から下降高さH0に下降(図18(a)でFr6〜Fr7に示す動きであり図23(e)〜図23(f)の動きである。)させるように、フォーク昇降モータM4の作動を制御する。
【0102】
コンテナCを収納部8へ受け渡すべく載置位置から収納位置にコンテナCを移動させる場合は、側面係止式移動操作装置STによりコンテナCを棚前後方向に移動させた後に、正面係止体FKを正面側被係止部24に係止させるべく昇降操作手段UDにより正面係止式移動操作装置FTを下降高さH0から第2上昇高さH2に上昇(図19(a)でFs0〜Fs1に示す動きである。)させ、さらに、第2上昇高さH2から第3上昇高さH3に上昇(図19(a)でFs2〜Fs3に示す動きである。)させるように、フォーク昇降モータM4の作動を制御する。
【0103】
コンテナCを収納部8から取り出す場合にクレーンコントローラHが実行する取出用正面係止式移動操作処理及び取出用側面係止式移動操作処理について説明する。以下の説明では、第1物品収納棚5a及び第2物品収納棚5bのうち第1物品収納棚5aの収納部8からコンテナCを取り出す場合、特に、この収納部8が備える前後2つの収納位置のうち奥棚からコンテナCを取り出す場合を例に、説明する。図22〜図24には、取出用正面係止式移動操作処理及び取出用側面係止式移動操作処理が実行されることで移動操作されるコンテナCの状態を状態(a)〜状態(i)にて示している。以下の説明では、図14及び図15のフローチャートに基づいて説明するが、図22〜図24の状態(a)〜状態(i)も適宜参照しながら説明する。
【0104】
まず、取出用正面係止式移動操作処理について図14に示すフローチャートに基づいて説明する。図14のフローチャートでは、正面係止体FKについての位置及び傾斜規制アーム57の位置を示す符号を各処理に対応させて記載している。これらの符号は、コンテナCを収納部8から取り出す場合の正面係止体FKについての位置の変化(黒小丸)と傾斜規制アーム57の位置の変化(白大丸)との対応を示す図18(a)における符号を用いている。正面係止式移動操作装置FT(多段フォークFD及び正面係止体FK)を昇降させ、また、多段フォークFDの第1フォーク31を出退させることを、以下では、簡単に、正面係止体FKを昇降させる、出退させる、と表現する。
【0105】
ステップ#Rf1(以下ではステップという語を省略する)で、状態(a)において、フォーク出退モータM3の突出方向での回転駆動を開始させる。なお、状態(a)では、直前のコンテナCの受け渡し動作により、正面係止体FKが係止用準備高さH1で引退位置に位置している。
【0106】
#Rf2〜#Rf3のループで、正面係止体FKが突出限度に達するまでの間、フォーク出退モータM3の出力トルクが当接検出用の設定値以上となるかを監視する。通常は、正面係止体FKが突出限度に達するまでに正面係止体FKが移載対象のコンテナCの正面部における被押当部分Z2に当接することにより、出力トルクが当接検出用の設定値以上となって、#Rf4へ移行してフォーク出退モータM3の作動を停止させて、状態(b)とする。出力トルクが当接検出用の設定値以上となることなく、正面係止体FKが突出限度に達した場合は、#Rf5へ移行し、システム異常とする。
【0107】
なお、正面係止体FKが突出限度は、上位の管理コントローラからの送信される移載対象の物品についての収納位置情報に基づいて、クレーンコントローラHに記憶されている奥棚用突出限度情報及び手前棚用突出限度情報の2つのうちの何れか一方が取出用正面係止式移動操作処理の実行初期に選択設定される。
【0108】
#Rf6で、フォーク出退モータM3を引退方向にわずかに回転駆動させて、図20に示すように、正面係止体FKの立ち上がり部の先端を棚前後方向で係入空間Z1の中間に位置させてから、#Rf7で、フォーク昇降モータM4を上昇側に回転駆動させて、正面係止体FKを係止用準備高さ(第1上昇高さH1)から取出用引込高さ(第3上昇高さH3)に上昇させて、状態(c)とする。
【0109】
このように、正面係止体FKを移載対象のコンテナCの正面部における被押当部分Z2に当接させた後に引退方向に戻す操作をしてから、係入空間Z1の中間に位置させることで、移載対象のコンテナCが収納位置から僅かにずれている場合でも、正面係止体FKを係入空間Z1に適正に係入させることができるようになっている。
【0110】
#Rf8で、フォーク出退モータM3を引退方向に回転駆動させて、図21に示すように、正面係止体FKを、棚前後方向で前端ストッパ17の奥側に設定された持ち上げ状態切換位置に位置させる。奥棚からコンテナCを取り出す場合と、手前棚からコンテナCを取り出す場合とでは、#Rf8における持ち上げ状態切換位置までの移動距離は当然ながら異なる。なお、移載対象のコンテナCが収納位置から僅かにずれている場合でも、#Rf8での移動によりコンテナCが持ち上げ状態切換位置に位置するため、移載対象のコンテナCの収納位置でのずれの程度によっても#Rf8での移動距離は変動する。
【0111】
#Rf9で、フォーク昇降モータM4を上昇方向に回転駆動させて、正面係止体FKを取出用引込高さ(第1上昇高さH1)からストッパ乗越用高さ(第4上昇高さH4)まで上昇させて、状態(d)とする。#Rf9で正面係止体FKが上昇を開始すると、コンテナCの棚前後方向で手前側端部が持ち上がり始めて、コンテナCは持ち上げ状態となる。その後、正面係止体FKがストッパ乗越用高さとなるまで、コンテナCの棚前後方向で手前側端部の上昇が継続する。
【0112】
#Rf10で、フォーク出退モータM3の引退方向での回転駆動を開始させて、#Rf11のループで正面係止体FKが引退位置に達したか否かを監視する。一対の引退位置検出センサ36の検出情報に基づいて、正面係止体FKが引退位置に達したことが検出されると、#Rf12でフォーク出退モータM3の回転駆動を停止させて、状態(e)とする。
【0113】
#Rf10でフォーク出退モータM3の引退方向での回転駆動を開始させてから、#Rf12で停止させるまでの間、後述するように、アーム位置判別部J2の判別情報に基づいて、位置変更操作手段ADにより、取り出し用作用位置の始点Pr1から取り出し用作用位置の終点Pr2まで、追従用の速度VLで一対の傾斜規制アーム57が、コンテナCの棚手前側への移動に追従する状態で揺動操作される。これにより、持ち上げ状態のコンテナCが移載方向視で傾斜しても、コンテナCを中継位置まで適切に移動操作できるようにしている。
【0114】
面係止体FKが引退位置に達する間際には、コンテナCの底面が載置支持部MSに当接しており、状態(e)では、コンテナCは、棚前後方向で奥側の下端部が収納部8に支持され、かつ、底面が載置支持部MSにて支持された状態となっている。これにより移載対象のコンテナCについての収納位置から中継位置までの移動が完了する。なお、コンテナCの持ち上げ状態は、正面係止体FKが引退位置に達する間際に終了する。
【0115】
コンテナCについての中継位置までの移動が完了した後は、その後の載置位置までの移動を側面係止式移動操作装置STに引き継ぐべく、#Rf13で、フォーク昇降モータM4を下降方向に回転駆動させて、正面係止体FKをストッパ乗越用高さ(第4上昇高さH4)から下降高さH0まで下降させて、状態(f)とする。以上で、取出用正面係止式移動操作処理が完了する。なお、#Rf13で、正面係止体FKを下降させると同時に、取出用側面係止式移動操作処理により、側面係止体SKを左右一対の前側凹部21Fに係入させる。
【0116】
次に、取出用正面係止式移動操作処理について図15に示すフローチャートに基づいて説明する。
【0117】
#Rs1で、状態(e)において、取出用正面係止式移動操作処理により正面係止体FKが下降すると同時に、チェーン駆動モータM5を、低速巻回速度V1に対応する回転速度で受け取り用の回転方向で駆動して、環状チェーンCHを受け取り方向で低速巻回速度V1で巻回作動させる。これにより、側面係止体SKを待機位置から係合始点位置に移動させて、中継位置に位置しているコンテナCの左右一対の前側凹部21Fに係合させ、状態(f)とする。
【0118】
なお、状態(e)では、直前のコンテナCの受け渡し動作により、側面係止体SKが図5及び図6に示す待機位置に位置している。図1〜図4でも、側面係止体SKは待機位置に位置しているはずであるが、説明の便宜上、側面係止体SKを実際とは異なる位置に示している。
【0119】
#Rs2で、状態(e)において、チェーン駆動モータM5を、受け取り用の回転方向で高速速巻回速度V2に対応する回転速度で回転駆動させて、環状チェーンCHを受け取り方向で高速速巻回速度V2で巻回作動させる。#Rs3のループで、中央センサ68bがコンテナCの棚前後方向で手前側の端部を検出してONとなるか監視する。これによりコンテナCが、高速カット位置を通過したことを検出できる。#Rs3のループにより、状態(g)に示す程度までコンテナCの移動が進行すると、中央センサ68bがONすることで、#Rs3から#Rs4へ移行し、チェーン駆動モータM5の回転速度が、高速速巻回速度V2に対応する回転速度から、低速巻回速度V1に対応する回転速度に切り換えられ、環状チェーンCHの巻回作動速度が、高速速巻回速度V2から低速巻回速度V1に減速され、そのまま移動操作が継続する。
【0120】
このとき、コンテナCが状態(g)に示す傾斜姿勢から載置支持部MSに載置支持された水平方向に沿う姿勢に急激に変化することになる。コンテナCの急激な姿勢変化により、コンテナCの底面が載置支持部MSの載置支持面に衝突するが、載置支持部MSにおける一対のローラコンベヤ27の各ローラ28にはウレタンゴムシート30が装着されているので、載置支持面に対する衝突時の衝撃が緩和されるとともに、衝撃音の発生も抑制される。
【0121】
#Rs5のループで、第2センサ68cがコンテナCの棚前後方向で手前側の端部を検出してONとなるかを監視する。第2センサ68cがONすると#Rs5から#Rs6へ移行しタイマのカウントが開始される。そして#Rs7のループにより、タイマが第1設定カウント値に達すると、コンテナCが停止準備位置を通過したとして、#Rs7から#Rs8へ移行する。
【0122】
#Rs8では、フォーク昇降モータM4を上昇方向に回転駆動させて、正面係止式移動操作装置FTを下降高さH0から取出用引込高さ(第1上昇高さH1)まで上昇させて、状態(h)とする。その後、#Rs9のループでタイマが第2設定カウント値に達すると、コンテナCが載置位置に達したとして、#Rs9から#Rs10へ移行し、チェーン駆動モータM5の回転駆動を停止させて、環状チェーンCHの巻回作動を停止させる。
【0123】
このように、側面係止式移動操作装置STによるコンテナCの移動が完了する直前で、正面係止式移動操作装置FTを上昇させることで、多段フォークFDの第1フォークとの間で適度な摩擦力を得た状態で、側面係止体SKを停止させることができ、コンテナCを停止させた位置で適切に保持することができる。なお、取出用側面係止式移動操作処理が完了した後は、搬送先である移載対象箇所についての移載用位置に移載装置CTを位置させるべく、スタッカークレーン1を走行作動又は昇降作動させるが、その間は、正面係止式移動操作装置FTを第1上昇高さH1に維持するようにしている。これによる、スタッカークレーン1による搬送中にコンテナCが位置ずれすることを防止している。
【0124】
以上のように、クレーンコントローラHは、コンテナCを収納部8から取り出す場合において、収納位置から載置位置までコンテナCを移動させるときに、正面係止式移動操作装置FTにより移動されるコンテナCが中継位置に位置すると、正面係止体FKを正面側被係止部24から離脱させるべく、正面係止式移動操作装置FTを下降高さH0に下降させる離脱用下降処理(取出用正面係止式移動操作処理における#Rf13)を実行し、その後、側面係止式移動操作装置STにより移動されるコンテナCが載置位置から設定距離だけ手前の停止準備位置に位置すると、移載対象のコンテナCを正面係止式移動操作装置FTの載置支持面にて載置支持するべく、正面係止式移動操作装置FTを第1上昇高さH1に上昇させる載置支持用上昇処理(取出用側面係止式移動操作処理における#Rs8)を実行する。
【0125】
コンテナCを収納部8へ受け渡す場合にクレーンコントローラHが実行する受渡用側面係止式移動操作処理及び受渡用正面係止式移動操作処理については、図16及び図17に示す通りである。コンテナCを収納部8から取り出す場合のような詳細な説明は省略するが、コンテナCを収納部8へ受け渡す場合でも、#Sf4でフォーク出退モータM3の突出方向での回転駆動を開始させてから、#Sf6で停止させるまでの間、後述するように、アーム位置判別部J2の判別情報に基づいて、位置変更操作手段ADにより、受け渡し用作用位置の始点Ps1から受け渡し用作用位置の終点Ps2まで、追従用の速度VLで一対の傾斜規制アーム57が、コンテナCの棚奥側への移動に追従する状態で揺動操作される。これにより、持ち上げ状態のコンテナCが移載方向視で傾斜しても、コンテナCを棚前後方向で前端ストッパ17の奥側に設定された持ち上げ状態切換位置にまで適切に移動操作できるようにしている。
【0126】
なお、受渡用正面係止式移動操作処理を示す図17のフローチャートでは、図14同様に、正面係止体FKについての位置及び傾斜規制アーム57の位置を示す符号を各処理に対応させて記載している。これらの符号は、コンテナCを収納部8へ受け渡す場合の正面係止体FKについての位置(黒小丸)の変化と傾斜規制アーム57の位置(白大丸)の変化との対応を示す図19(a)における符号を用いている。
【0127】
〔位置変更操作手段の制御〕
一対の傾斜規制アーム57を位置変更操作する位置変更操作手段ADの作動は、クレーンコントローラHにより、移動操作装置T(正面係止式移動操作装置FT及び側面係止式移動操作装置ST)の作動状態に合わせて制御される。すなわち、図13に示すように、クレーンコントローラHは、作動状態判別手段としてプログラム形式で構成された作動状態判別部J1を備えて作動中の移動操作装置Tの作動状態を判別できるようになっており、作動状態判別部J1の判別情報に基づいて、以下の処理を実行して位置変更操作手段ADの作動を制御する。
【0128】
すなわち、コンテナCを収納部8から取り出す場合は、一対の傾斜規制アーム57を退避位置P0から取り出し用作用位置の始点Pr1へ準備用の速度VHで揺動操作する取り出し用準備処理、一対の傾斜規制アーム57を取り出し用作用位置の始点Pr1から取り出し用作用位置の終点Pr2へ追従用の速度VLで揺動操作する取り出し用追従処理、一対の傾斜規制アーム57を取り出し用作用位置の終点Pr2から退避位置P0へ準備用の速度VHで揺動操作する取り出し用退避処理を順次実行する。
【0129】
また、コンテナCを収納部8へ受け渡す場合は、一対の傾斜規制アーム57を退避位置P0から受け渡し用作用位置の始点Ps1へ準備用の速度VHで揺動操作する受け渡し用準備処理、一対の傾斜規制アーム57を受け渡し用作用位置の始点Ps1から受け渡し用作用位置の終点Ps2へ追従用の速度VLで揺動操作する受け渡し用追従処理、一対の傾斜規制アーム57を受け渡し用作用位置の終点Ps2から退避位置P0へ準備用の速度VHで揺動操作する受け渡し用退避処理を順次実行する。
【0130】
図13に示すように、作動状態判別部J1は、正面係止式移動操作装置FT及び側面係止式移動操作装置STを駆動する各サーボモータM3〜M5のフィードバック情報及び移載対象のコンテナCの棚前後方向の位置を検出する3つのコンテナ位置検出用センサ68の検出情報に基づいて、作動中の移動操作装置Tの作動状態を判別する。
【0131】
図18は、コンテナCを収納部8から取り出す場合の正面係止式移動操作装置FTの作動状態Fr0〜Fr7と、位置変更操作手段ADにより位置変更操作される一対の傾斜規制アーム57の位置の変化(P0〜Pr1〜Pr2〜Pr0)を示している。図18(a)に示す正面係止式移動操作装置FTの作動状態Fr0〜Fr7は、図左右方向にて多段フォークFDの引退位置からの突出量(正面係止体FKの棚前後方向の位置)を示し、図上下方向にて昇降操作手段UDによる多段フォークFDの昇降位置(正面係止体FKの棚上下方向の位置)を示している。図18(a)に示す傾斜規制アーム57の位置の変化(P0〜Pr1〜Pr2〜Pr0)は、図18(b)で示す傾斜規制アーム57の位置に対応している。なお、図18(b)で示す傾斜規制アーム57は、第1物品収納棚5a側の一対の傾斜規制アーム57のうち、図4〜図6で紙面左側に位置する傾斜規制アーム57を示しており、コンテナCを収納部8から取り出す場合の図4〜図6に示された各位置と対応している。
【0132】
同様に、図19は、コンテナCを収納部8へ受け渡す場合の正面係止式移動操作装置FTの作動状態Fs0〜Fs7と、位置変更操作手段ADにより位置変更操作される一対の傾斜規制アーム57の位置の変化(P0〜Ps1〜Ps2〜Ps0)を示している。図19(a)に示す正面係止式移動操作装置FTの作動状態Fs0〜Fs7は、図左右方向にて多段フォークFDの引退位置からの突出量(正面係止体FKの棚前後方向の位置)を示し、図上下方向にて昇降操作手段UDによる多段フォークFDの昇降位置(正面係止体FKの棚上下方向の位置)を示している。図19(a)に示す傾斜規制アーム57の位置の変化(P0〜Ps1〜Ps2〜Ps0)は、図19(b)で示す傾斜規制アーム57の位置に対応している。
【0133】
コンテナCを収納部8から取り出す場合のクレーンコントローラHによる位置変更操作手段ADの制御動作について図18を参照しながら説明する。正面係止式移動操作装置FTは初期状態Fr0では、正面係止体FKは引退位置で第1高さH1に位置している。これは、図19(a)に示すコンテナCを収納部8へ受け渡す場合の正面係止式移動操作装置FTの第7状態Fs7と同じである。コンテナCを収納部8へ受け渡す動作が完了した後は、正面係止式移動操作装置FTは次のコンテナCの取り出し動作までその状態が維持されるためである。
【0134】
クレーンコントローラHは、正面係止式移動操作装置FTに、作動状態Fr0で正面係止体FKの突出を開始させて後(又は同時に)、取り出し用準備処理を実行して、アーム位置判別部J2の判別情報に基づいて、位置変更操作手段ADに、退避位置P0から取り出し用作用位置の始点Pr1まで、準備用の速度VHで一対の傾斜規制アーム57を揺動操作させる。準備用の速度VHは、取り出し用作用位置の始点Pr1への揺動が、正面係止式移動操作装置FTが作動状態Fr2で正面係止体FKの上昇操作を開始するまでには完了するように設定されている。
【0135】
正面係止式移動操作装置FTが、作動状態Fr2から作動状態Fr5に遷移するまでは、位置変更操作手段ADは作動させず一対の傾斜規制アーム57を取り出し用作用位置の始点Pr1で位置保持する。
【0136】
正面係止式移動操作装置FTに、作動状態Fr5で正面係止体FKの引退を開始させると同時に、取り出し用追従処理を実行して、アーム位置判別部J2の判別情報に基づいて、位置変更操作手段ADに、取り出し用作用位置の始点Pr1から取り出し用作用位置の終点Pr2まで、追従用の速度VLで一対の傾斜規制アーム57を揺動操作させる。追従用の速度VHは、一対の傾斜規制アーム57の先端部の棚前後方向での移動速度が、位置変更操作手段ADにより移動操作されるコンテナCの移動速度と同じになるように設定されている。
【0137】
正面係止式移動操作装置FTが正面係止体FKの引退を終了させて作動状態Fr6となると、コンテナCは中継位置に位置しており、棚前後方向で奥側の下端部が収納部8に支持され、底面の棚前後方向で手前側が載置支持部MSに支持された状態となっているため、コンテナCに偏荷重が存在していても、もはやコンテナCが移載方向視で傾斜するおそれはない。そこで、クレーンコントローラHは、正面係止式移動操作装置FTに、作動状態Fr6で正面係止体FKの下降を開始させると同時に、取り出し用退避処理を実行して、アーム位置判別部J2の判別情報に基づいて、位置変更操作手段ADに、取り出し用作用位置の終点Pr2から退避位置P0まで、準備用の速度VHで一対の傾斜規制アーム57を揺動操作させる。
【0138】
一対の傾斜規制アーム57は、正面係止式移動操作装置FTが正面係止体FKを下降高さH0まで下降させて作動状態Fr7となるまでに、退避位置P0までの揺動が完了するため、側面係止式移動操作装置STがコンテナCの移動操作を開始する時には、一対の傾斜規制アーム57は、コンテナCと干渉しない退避位置P0となっている。
【0139】
コンテナCを収納部8へ受け渡す場合のクレーンコントローラHによる位置変更操作手段ADの制御動作について図19を参照しながら説明する。
側面係止式移動操作装置STがコンテナCを中継位置までの移動操作を完了させた時点では、一対の傾斜規制アーム57は、未だ移動操作されておらず、退避位置P0に位置している。そして、クレーンコントローラHは、正面係止式移動操作装置FTを作動状態Fs0〜作動状態Fs2とする間も、位置変更操作手段ADを作動させず、一対の傾斜規制アーム57を退避位置P0から移動させない。そして、正面係止式移動操作装置FTが作動状態Fs2となった後、正面係止式移動操作装置FTに、作動状態Fs2で正面係止体FKを受け渡し用準備高さ(第2上昇高さH2)から上昇させる前に、受け渡し用準備処理を実行して、アーム位置判別部J2の判別情報に基づいて、位置変更操作手段ADに、退避位置P0から受け渡し用作用位置の始点Ps1まで、準備用の速度VHで一対の傾斜規制アーム57を揺動操作させる。一対の傾斜規制アーム57が受け渡し用作用位置の始点Ps1に達するまで、正面係止式移動操作装置FTは、正面係止体FKを受け渡し用準備高さ(第2上昇高さH2)で位置保持させ、対の傾斜規制アーム57が受け渡し用作用位置の始点Ps1に達すると、正面係止体FKを受け渡し用準備高さ(第2上昇高さH2)からの上昇を開始させて、コンテナCを持ち上げ状態とし、そのままストッパ乗越用高さ(第4上昇高さH4)まで持ち上げる。
【0140】
このように、正面係止式移動操作装置FTが作動状態Fs2となるまで、つまり、側面係止式移動操作装置STにて中継位置まで移動操作されたコンテナCの係入空間Z1に対して、正面係止体FKを係入させるための上昇操作を開始するまで、位置変更操作手段ADを作動させないことで、側面係止式移動操作装置STにて中継位置まで移動操作されるコンテナCと一対の傾斜規制アーム57との干渉を回避でき、また、コンテナCが極力棚奥側まで移動した状態で一対の傾斜規制アーム57を受け渡し用作用位置の始点Ps1とすることで、さらに棚奥側となる受け渡し用作用位置の終点Ps2まで、一対の傾斜規制アーム57をコンテナCに対する作用位置を適切に維持したまま揺動操作させることができるようにしている。
【0141】
そして、正面係止式移動操作装置FTに、作動状態Fs3で正面係止体FKの突出を開始させると同時に、受け渡し用追従処理を実行して、アーム位置判別部J2の判別情報に基づいて、位置変更操作手段ADに、受け渡し用作用位置の始点Ps1から受け渡し用作用位置の終点Ps2まで、追従用の速度VLで一対の傾斜規制アーム57を揺動操作させる。
【0142】
正面係止式移動操作装置FTが正面係止体FKの突出を終了させて作動状態Fs4となると、コンテナCは持ち上げ状態切換位置に位置しており、コンテナCは収納部8に載置支持された状態となっているため、コンテナCに偏荷重が存在していても、もはやコンテナCが移載方向視で傾斜するおそれはない。そこで、クレーンコントローラHは、正面係止式移動操作装置FTに、作動状態Fs4で正面係止体FKの下降を開始させると同時に、受け渡し用退避処理を実行して、アーム位置判別部J2の判別情報に基づいて、位置変更操作手段ADに、受け渡し用作用位置の終点Pr2から退避位置P0まで、準備用の速度VHで一対の傾斜規制アーム57を揺動操作させる。
【0143】
以上説明した通り、クレーンコントローラHは、移動操作装置Tを作動させない場合は傾斜規制アーム57を退避位置P0に位置させ、移動操作装置Tを作動させる場合は、作動状態判別部J1の判別情報に基づいて、移載対象のコンテナCが載置支持部MSに支持された載置状態となっているときは傾斜規制アーム57を退避位置P0に位置させるべく、位置変更操作手段ADの作動を制御する。そして、コンテナCを収納部8から取り出す場合において移載対象のコンテナCが持ち上げ状態となっているとき(図4、図5及び図9)は傾斜規制アーム57を取り出し用作用位置Pr1〜Pr2(図18(b)参照)に位置させ、コンテナCを収納部8から受け渡す場合において移載対象のコンテナCが持ち上げ状態となっているときは受け渡し用作用位置Ps1〜Ps2(図19(b)参照)に位置させるべく、位置変更操作手段ADの作動を制御するように構成されている。
【0144】
また、クレーンコントローラHは、傾斜規制アーム57の位置を切り換えるタイミングを作動状態判別部J1の判別情報に基づいて判断し、傾斜規制アーム57の位置をアーム位置判別部J2の判別情報に基づいて判断する。
【0145】
クレーンコントローラHは、持ち上げ状態で棚前後方向に移動するコンテナCに追従して傾斜規制アーム57が取り出し用作用位置Pr1〜Pr2や受け渡し用作用位置Ps1〜Ps2に維持されるように、傾斜規制アーム57追従用の速度VLで位置変更させるべく位置変更操作手段ADの作動を制御し、傾斜規制アーム57を退避位置P0から取り出し用作用位置の始点Pr1や受け渡し用作用位置の始点Ps1に位置変更するとき、取り出し用作用位置の終点Pr2や受け渡し用作用位置の終点Ps2から退避位置P0に位置変更するときは、傾斜規制アーム57を追従用の速度VLよりも高速の準備用の速度VHで位置変更させるべく位置変更操作手段ADの作動を制御するように構成されている。
【0146】
〔別の実施形態〕
以上、発明者によってなされた発明を発明の実施の形態に基づき具体的に説明したが、本発明は上記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能である。以下、本発明の別実施形態を例示する。
【0147】
(1)上記実施形態では、正面係止式移動操作装置による物品の移動と側面係止式移動操作装置による物品の移動とが、棚前後方向における中継箇所の1箇所で切り換わるものを例示したが、正面係止式移動操作装置による物品の移動と側面係止式移動操作装置による物品の移動とが、棚前後方向で重複する範囲を持つようにして、中継範囲では、正面係止式移動操作装置FT及び側面係止式移動操作装置STとの双方にて物品を移動操作されるものであってもよい。
【0148】
(2)上記実施形態では、正面係止式移動操作装置を載置支持部に対して昇降操作することで、物品の正面側被係止部に対して正面係止体を係脱させるものを例示したが、これに代えて、スタッカークレーンの昇降台を昇降させることで、物品の正面側被係止部に対して正面係止体を係脱させるものであってもよい。
【0149】
(3)上記実施形態では、載置支持部をローラコンベヤにて構成したものを例示したが、載置支持部を、移載対象の物品が棚前後方向に移動されるときに物品の底面を摺動自在に支持する載置支持台にて構成してもよい。また、ローラコンベヤにて構成する場合には、棚前後方向で棚側の端部に位置するローラに代えて、移載対象の物品が前記中継位置に位置しているときに当該物品の底面を受け止め支持する受止体を備えて構成してもよい。
【0150】
(4)上記実施形態では、収納部が棚前後方向に2個の物品を収納可能に構成されたものを例示したが、収納部が棚前後方向に3個以上の物品を収納可能に構成されたもの、又は、収納部が棚前後方向に単一の物品を収納可能に構成されたものであってもよい。
【0151】
(5)上記実施形態では、移動操作装置が、収納部における規制用突部の上端部よりも高い位置に載置支持部の載置支持面を位置させた状態で、コンテナを棚前後方向に移動操作するものを例示したが、収納部に規制用突部を設けない場合は、移動操作装置が、収納部の載置支持面と同じ高さ又はそれよりも設定量だけ高い高さに載置支持部の載置支持面を位置させた状態で、コンテナを棚前後方向に移動操作するものであってもよい。
【0152】
(6)上記実施形態では、移動操作装置が、収納部から物品を取り出す場合も、収納部へ物品を受け渡す場合も、移載手段を、収納部についての同じ移載用位置に位置させるものを例示したが、これに限らず、収納部から物品を取り出す場合は、移載手段を収納部についての取り出し用の移載用位置に位置させ、収納部へ物品を受け渡す場合は、移載手段を、取り出し用の移載用位置とは上下方向の位置が異なる受け渡し用の移載用位置に位置させるものであってもよい。
【符号の説明】
【0153】
C 物品
H 制御手段
CT 移載手段
MS 載置支持部
T 移動操作装置
FT 正面係止式移動操作装置
FD 多段フォーク
FK 正面係止体
H0 下降高さ
H1 上昇高さ
ST 側面係止式移動操作装置
CH 一対の無端回動帯
G ガイド部材
1 スタッカークレーン
4 移動用通路
5 物品収納棚
8 収納部
17 規制用突部
20 左右一対の側面係止体
22R 取り出し用のリブ
22S 受け渡し用のリブ
22 一組のリブ
24 正面側被係止部
27 ローラコンベヤ
28 ローラ
30 弾性部材
34 フォーク体
【特許請求の範囲】
【請求項1】
平面視矩形状の物品を載置支持する収納部が上下左右に並ぶ状態で配設された物品収納棚と、
前記物品収納棚の前面側において走行自在で、かつ、前記収納部との間で物品を移載自在な移載手段を昇降自在に備えて構成されたスタッカークレーンとが設けられた物品収納設備であって、
前記移載手段が、物品を載置支持する載置支持部と、前記収納部における収納位置と前記載置支持部における載置位置との間で物品を棚前後方向に沿って移動させる移動操作装置とを備えて構成され、
前記移動操作装置として、
物品の棚前後方向で前側の正面部に設けられた正面側被係止部に係脱自在な正面係止体を棚前後方向に移動自在に備えて、前記正面側被係止部に前記正面係止体を係止させた状態で、前記収納位置と、移載対象の物品の底面における棚前後方向で奥側端部よりも手前側の箇所が前記載置支持部に支持されかつ移載対象の物品の棚前後方向で奥側の下端部が前記収納部に支持される中継位置との間で、移載対象の物品を移動させる正面係止式移動操作装置と、
物品の棚左右方向の両側面部に形成された縦方向に沿うリブに対して各別に係脱自在な左右一対の側面係止体を棚前後方向に移動自在に備えて、前記リブに前記側面係止体を係止させた状態で、前記中継位置と前記載置位置との間で移載対象の物品を移動させる側面係止式移動操作装置とを備えて構成されている物品収納設備。
【請求項2】
前記左右一対の側面係止体の夫々は、水平面に沿う巻回経路を形成する状態で物品の棚左右方向の長さよりも長い間隔を隔てて棚左右方向に分散配置された一対の無端回動帯の夫々に、前記巻回経路の外側に突出する状態で設けられて、前記一対の無端回動帯を回動させることにより、前記リブに対して係脱自在でかつ棚前後方向に移動自在に構成され、
前記側面係止式移動操作装置は、前記一対の無端回動帯の夫々における物品存在側となる経路部分を棚前後方向に案内するガイド部材を備えて構成されている請求項1記載の物品収納設備。
【請求項3】
前記物品収納棚が、前記収納部の物品出し入れ用間口が互いに対向する姿勢で前記スタッカークレーンの移動用通路を形成するべく棚前後方向に間隔を隔てた状態で一対設けられ、
前記移動操作装置が、前記一対の物品収納棚の夫々における前記収納部における収納位置と前記載置支持部における載置位置との間で物品を棚前後方向に沿って移動自在に構成され、
前記リブとして、前記収納部から物品を取り出す場合に前記側面係止体と係合する取り出し用のリブと、これに棚前後方向で近接して前記収納部へ物品を受け渡す場合に前記側面係止体と係合する受け渡し用のリブとを一組として、物品の両側面における棚前後方向の両端部の夫々に設けられ、
前記左右一対の側面係止体として、物品の両側面における前記一組のリブの棚前後方向の間隔と略同じ距離だけ各無端回動帯の経路方向で間隔を隔てた状態で二対設けられ、
前記二対の側面係止体のそれぞれは、物品が前記載置支持部における前記載置位置に位置しているときに、棚前後方向で前記一組のリブの間に位置するように配置されている請求項2記載の物品収納設備。
【請求項4】
前記収納部に収納されている物品が前記収納部の物品出し入れ用間口から突出することを規制する上向き姿勢の規制用突部が、前記収納部の物品載置支持面の棚前後方向で手前側の端部に設けられ、
前記スタッカークレーンの作動を制御する制御手段が、前記規制用突部の上端部よりも高い位置に前記載置支持部の載置支持面を位置させた状態で前記側面係止式移動操作装置により前記中継位置から前記載置位置に物品を移動させるべく、前記スタッカークレーンの作動を制御するように構成され、
前記載置支持部の載置支持面に弾性部材が設けられている請求項1〜3の何れか1項記載の物品収納設備。
【請求項5】
前記載置支持部が、複数の遊転自在なローラを棚前後方向に並ぶ状態で備えたローラコンベヤにて構成され、
前記弾性部材が、前記複数のローラの夫々の外周面に巻回されている請求項4記載の物品収納設備。
【請求項6】
前記正面係止式移動操作装置が、物品を載置支持自在に構成され、かつ、その載置支持面が前記載置支持部の載置支持面よりも低くなる下降高さと、その載置支持面が前記載置支持部の載置支持面よりも高くなる上昇高さとに昇降自在に設けられ、かつ、昇降作動により移載対象の物品の前記正面側被係止部に対して前記正面係止体を係脱自在に構成され、
前記制御手段は、物品を前記収納位置から前記載置位置まで物品を移動させる場合は、前記正面係止式移動操作装置により移動される物品が前記中継位置に位置すると、前記正面係止体を前記正面側被係止部から離脱させるべく前記正面係止式移動操作装置を下降高さに下降させる離脱用下降処理を実行し、その後、前記側面係止式移動操作装置により移動される物品が前記載置位置から設定距離だけ手前の停止準備位置に位置すると、移載対象の物品を前記正面係止式移動操作装置の載置支持面にて載置支持するべく前記正面係止式移動操作装置を前記上昇高さに上昇させる載置支持用上昇処理を実行するように構成されている請求項5記載の物品収納設備。
【請求項7】
前記収納部が、棚前後方向に複数個の物品を収納可能に構成され、
前記正面係止式移動操作装置が、棚前後方向に長尺のフォーク体を棚前後方向に出退自在に備えた多段フォークを備えて構成され、
前記正面係止体が、前記フォーク体の上下厚みの範囲内に納まる状態で突出側の先端部に設けられている請求項1〜6の何れか1項記載の物品収納設備。
【請求項1】
平面視矩形状の物品を載置支持する収納部が上下左右に並ぶ状態で配設された物品収納棚と、
前記物品収納棚の前面側において走行自在で、かつ、前記収納部との間で物品を移載自在な移載手段を昇降自在に備えて構成されたスタッカークレーンとが設けられた物品収納設備であって、
前記移載手段が、物品を載置支持する載置支持部と、前記収納部における収納位置と前記載置支持部における載置位置との間で物品を棚前後方向に沿って移動させる移動操作装置とを備えて構成され、
前記移動操作装置として、
物品の棚前後方向で前側の正面部に設けられた正面側被係止部に係脱自在な正面係止体を棚前後方向に移動自在に備えて、前記正面側被係止部に前記正面係止体を係止させた状態で、前記収納位置と、移載対象の物品の底面における棚前後方向で奥側端部よりも手前側の箇所が前記載置支持部に支持されかつ移載対象の物品の棚前後方向で奥側の下端部が前記収納部に支持される中継位置との間で、移載対象の物品を移動させる正面係止式移動操作装置と、
物品の棚左右方向の両側面部に形成された縦方向に沿うリブに対して各別に係脱自在な左右一対の側面係止体を棚前後方向に移動自在に備えて、前記リブに前記側面係止体を係止させた状態で、前記中継位置と前記載置位置との間で移載対象の物品を移動させる側面係止式移動操作装置とを備えて構成されている物品収納設備。
【請求項2】
前記左右一対の側面係止体の夫々は、水平面に沿う巻回経路を形成する状態で物品の棚左右方向の長さよりも長い間隔を隔てて棚左右方向に分散配置された一対の無端回動帯の夫々に、前記巻回経路の外側に突出する状態で設けられて、前記一対の無端回動帯を回動させることにより、前記リブに対して係脱自在でかつ棚前後方向に移動自在に構成され、
前記側面係止式移動操作装置は、前記一対の無端回動帯の夫々における物品存在側となる経路部分を棚前後方向に案内するガイド部材を備えて構成されている請求項1記載の物品収納設備。
【請求項3】
前記物品収納棚が、前記収納部の物品出し入れ用間口が互いに対向する姿勢で前記スタッカークレーンの移動用通路を形成するべく棚前後方向に間隔を隔てた状態で一対設けられ、
前記移動操作装置が、前記一対の物品収納棚の夫々における前記収納部における収納位置と前記載置支持部における載置位置との間で物品を棚前後方向に沿って移動自在に構成され、
前記リブとして、前記収納部から物品を取り出す場合に前記側面係止体と係合する取り出し用のリブと、これに棚前後方向で近接して前記収納部へ物品を受け渡す場合に前記側面係止体と係合する受け渡し用のリブとを一組として、物品の両側面における棚前後方向の両端部の夫々に設けられ、
前記左右一対の側面係止体として、物品の両側面における前記一組のリブの棚前後方向の間隔と略同じ距離だけ各無端回動帯の経路方向で間隔を隔てた状態で二対設けられ、
前記二対の側面係止体のそれぞれは、物品が前記載置支持部における前記載置位置に位置しているときに、棚前後方向で前記一組のリブの間に位置するように配置されている請求項2記載の物品収納設備。
【請求項4】
前記収納部に収納されている物品が前記収納部の物品出し入れ用間口から突出することを規制する上向き姿勢の規制用突部が、前記収納部の物品載置支持面の棚前後方向で手前側の端部に設けられ、
前記スタッカークレーンの作動を制御する制御手段が、前記規制用突部の上端部よりも高い位置に前記載置支持部の載置支持面を位置させた状態で前記側面係止式移動操作装置により前記中継位置から前記載置位置に物品を移動させるべく、前記スタッカークレーンの作動を制御するように構成され、
前記載置支持部の載置支持面に弾性部材が設けられている請求項1〜3の何れか1項記載の物品収納設備。
【請求項5】
前記載置支持部が、複数の遊転自在なローラを棚前後方向に並ぶ状態で備えたローラコンベヤにて構成され、
前記弾性部材が、前記複数のローラの夫々の外周面に巻回されている請求項4記載の物品収納設備。
【請求項6】
前記正面係止式移動操作装置が、物品を載置支持自在に構成され、かつ、その載置支持面が前記載置支持部の載置支持面よりも低くなる下降高さと、その載置支持面が前記載置支持部の載置支持面よりも高くなる上昇高さとに昇降自在に設けられ、かつ、昇降作動により移載対象の物品の前記正面側被係止部に対して前記正面係止体を係脱自在に構成され、
前記制御手段は、物品を前記収納位置から前記載置位置まで物品を移動させる場合は、前記正面係止式移動操作装置により移動される物品が前記中継位置に位置すると、前記正面係止体を前記正面側被係止部から離脱させるべく前記正面係止式移動操作装置を下降高さに下降させる離脱用下降処理を実行し、その後、前記側面係止式移動操作装置により移動される物品が前記載置位置から設定距離だけ手前の停止準備位置に位置すると、移載対象の物品を前記正面係止式移動操作装置の載置支持面にて載置支持するべく前記正面係止式移動操作装置を前記上昇高さに上昇させる載置支持用上昇処理を実行するように構成されている請求項5記載の物品収納設備。
【請求項7】
前記収納部が、棚前後方向に複数個の物品を収納可能に構成され、
前記正面係止式移動操作装置が、棚前後方向に長尺のフォーク体を棚前後方向に出退自在に備えた多段フォークを備えて構成され、
前記正面係止体が、前記フォーク体の上下厚みの範囲内に納まる状態で突出側の先端部に設けられている請求項1〜6の何れか1項記載の物品収納設備。
【図1】


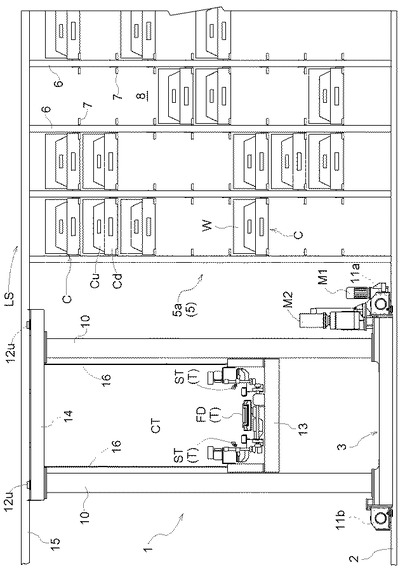
【図2】
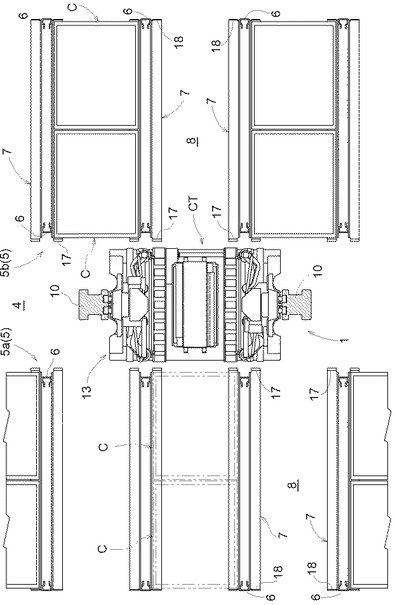
【図3】
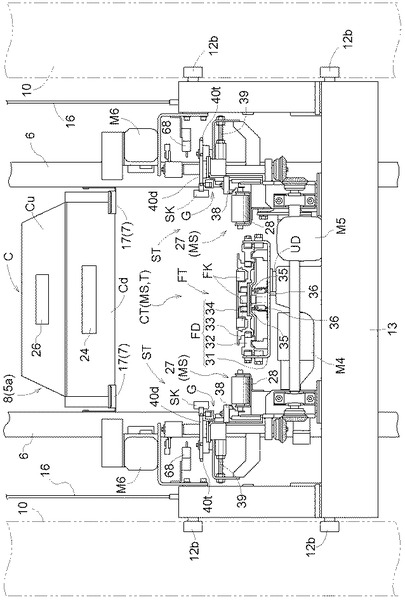
【図4】
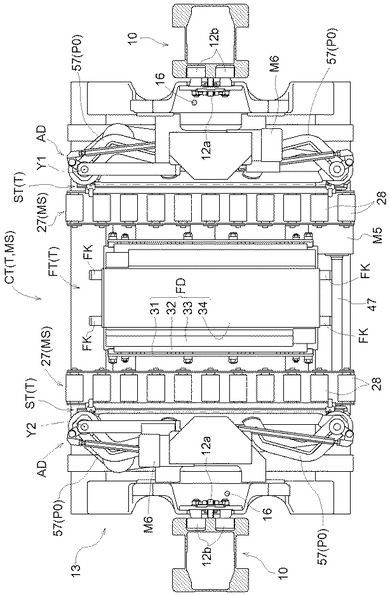
【図5】
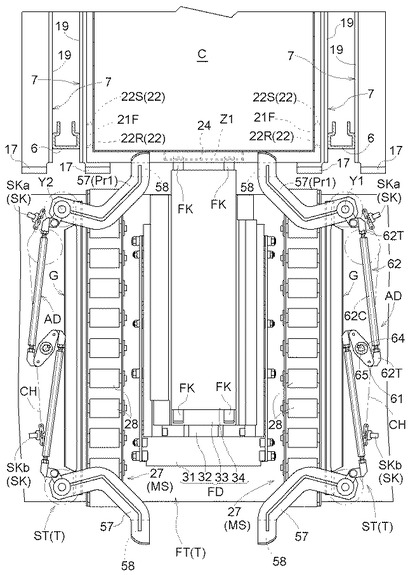
【図6】
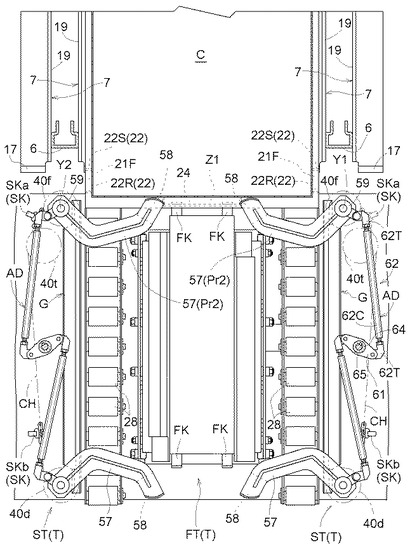
【図7】
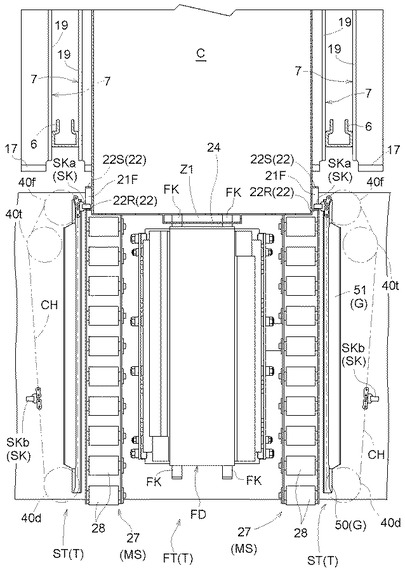
【図8】
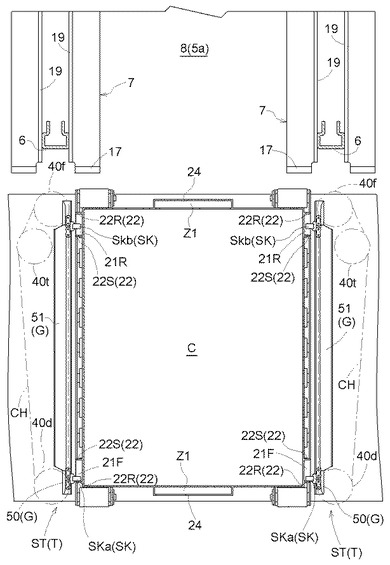
【図9】
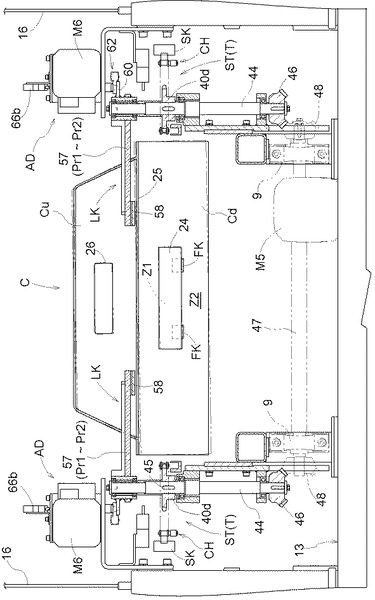
【図10】
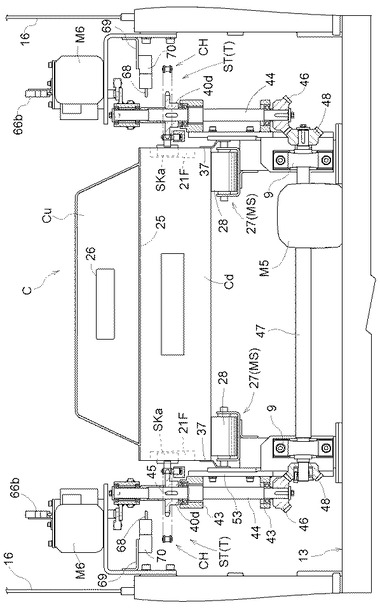
【図11】
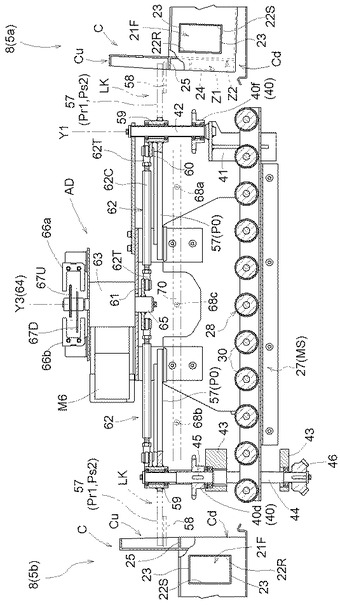
【図12】
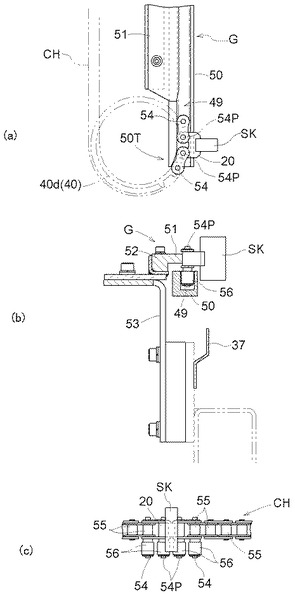
【図13】
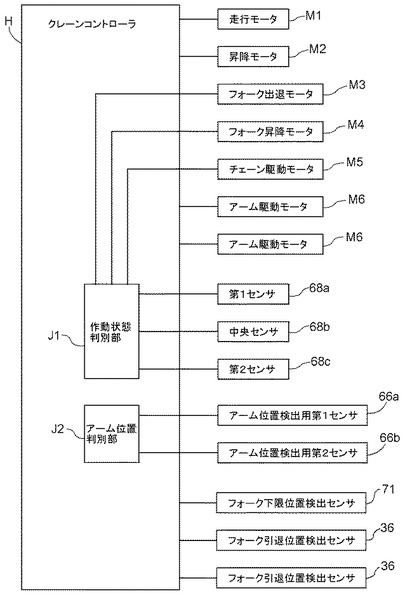
【図14】
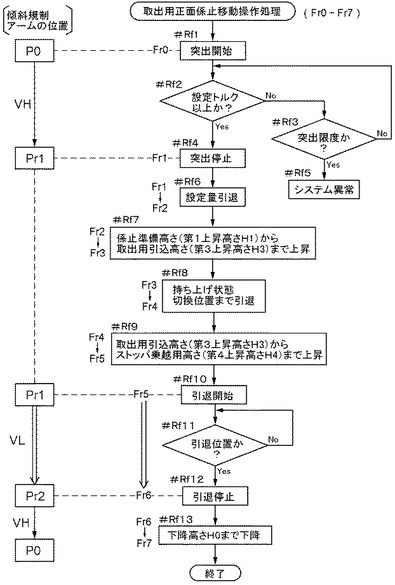
【図15】
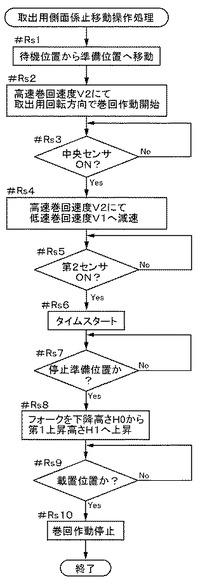
【図16】
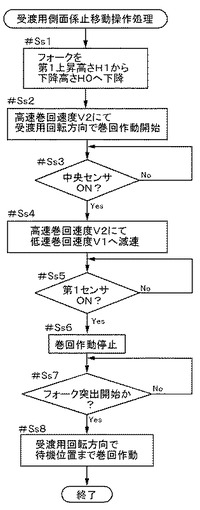
【図17】
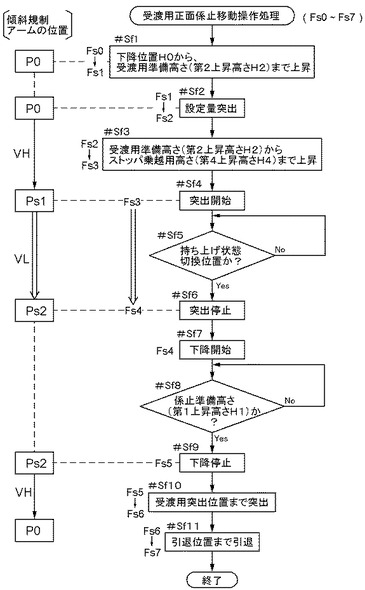
【図18】
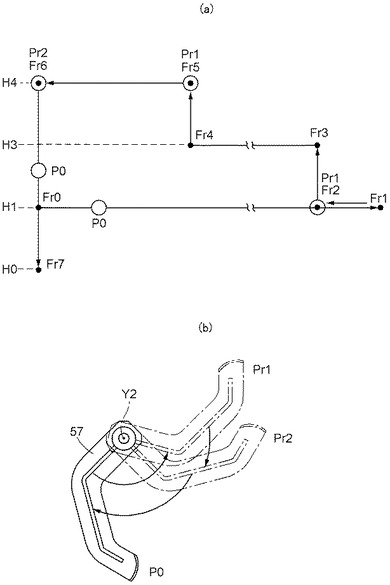
【図19】
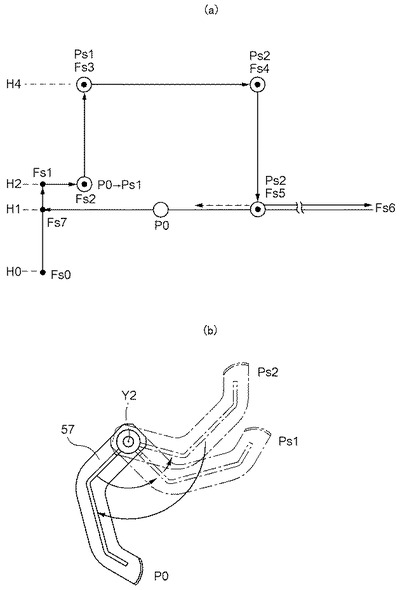
【図20】
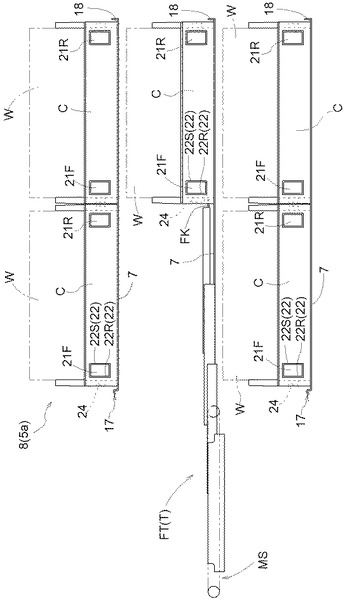
【図21】
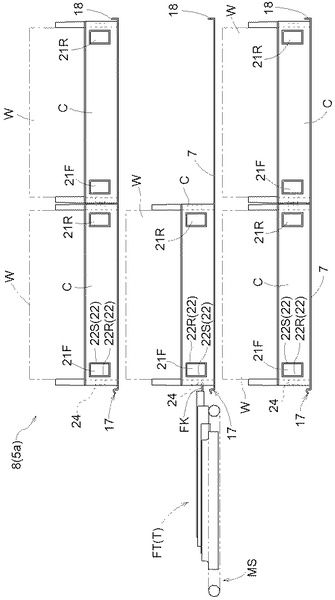
【図22】
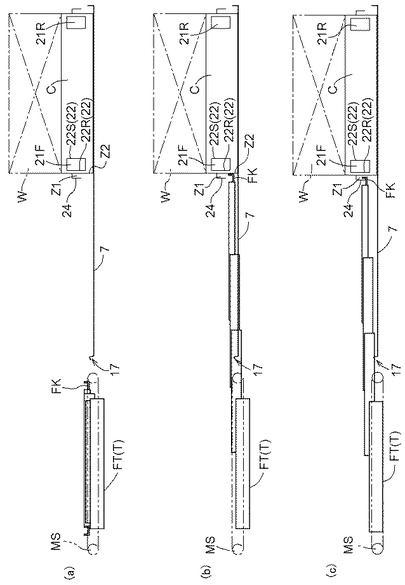
【図23】
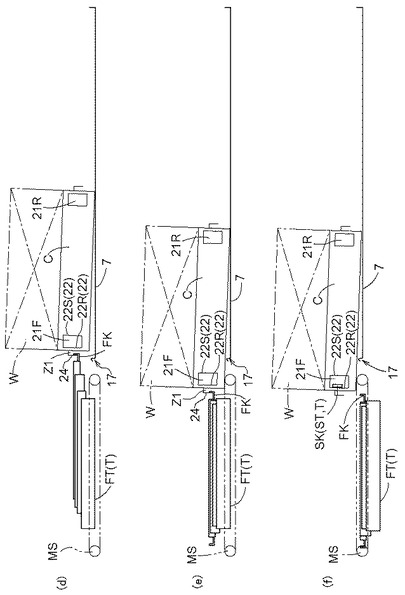
【図24】
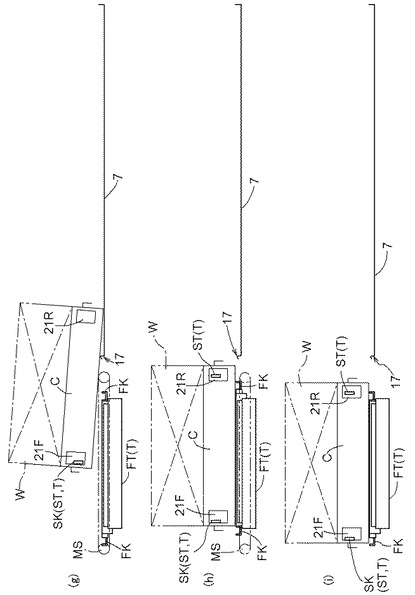
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2012−218927(P2012−218927A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−89423(P2011−89423)
【出願日】平成23年4月13日(2011.4.13)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月13日(2011.4.13)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
[ Back to top ]