
物品受取管理システムの起動時動作確認方法
【課題】回転軸を利用して蓋体を開閉する物品受取管理システムの起動時に、収容空間に設けられた全ての蓋体を、電圧降下を起こすことなく動作させることを可能とする起動時動作確認方法を提供する。
【解決手段】本発明に係る起動時動作確認方法は、駆動装置を介して駆動信号により回転が制御される回転軸を備えた棚に設置され、前記駆動装置に制御信号を出力するターミナルを複数備えた物品受取管理システムにおいて、前記複数のターミナルに送出される制御信号データ上の、前記複数のターミナルの各々に対応するデータ列のインデックスアドレスを、前記物品受取管理システムの起動時に把握し、前記インデックスアドレスに基づき前記ターミナルの各々について動作確認を行う。
【解決手段】本発明に係る起動時動作確認方法は、駆動装置を介して駆動信号により回転が制御される回転軸を備えた棚に設置され、前記駆動装置に制御信号を出力するターミナルを複数備えた物品受取管理システムにおいて、前記複数のターミナルに送出される制御信号データ上の、前記複数のターミナルの各々に対応するデータ列のインデックスアドレスを、前記物品受取管理システムの起動時に把握し、前記インデックスアドレスに基づき前記ターミナルの各々について動作確認を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物品の保管棚等の収容空間に蓋体を設け、その収容空間に保管している物品の中から、適切な物品、例えば、製品の組立てに必要な部品の受け取りや補給の指示を蓋体の開閉動作によって制御する物品受取管理システムにおいて、システムの起動時動作の確認を行うための方法に関する。
【背景技術】
【0002】
物品受取管理システムの代表的な例として、組立て生産工程、特にセル生産方式による工程等において広く使用されているピッキングシステムがある。このピッキングシステムとは、物品の保管棚に保管している物品の中から製品の組立てに必要な部品を受け取る作業や、逆に保管棚へ補給する作業の指示を制御するものである。より具体的には、物品が配置されていることを表示するとともに、その物品が搬出されたことを内容とする通知情報の入力手段を備えたターミナルを複数の保管棚の各々に配置し、これらターミナルを、制御装置を介してホストコンピュータに接続した構成をとるものである。そして、ホストコンピュータは部品の引取り指示を制御装置に送信し、制御装置が引取り指示の出された部品引き渡し棚に装着された前記ターミナルのランプや表示器により指示状態を表すようにしている。一方、指示された部品を引取り完了した作業者は、引取り完了入力として、ターミナルのレバースイッチを操作し、その操作信号が前記制御装置を経由し、ホストコンピュータに届くようになっており、作業の進捗や、誤作業の防止や、部品引き渡し棚への部品の補給、更には部品の在庫管理や、補給部品の発注などが行われる仕組みとなっている。なお、ターミナルにおける表示器や確認スイッチの形式には様々なものが採用されている。
【0003】
セル生産方式、すなわち、一人の作業員が複数の工程を担当とする方式は、近年広まっている方式であるが、そこに使用されるピッキングシステムとして、例えば、特開2002−12309号公報に開示された、冷蔵冷凍倉庫の冷凍品について寒冷域における集中表示式商品格納・ピッキングシステムがある。このシステムでは、物品保管する商品倉庫や、冷蔵冷凍倉庫の棚に配列された多数の物品について、ホストコンピュータと格納された物品の取り出し(ピッキング)作業をスイッチ入力し、その作業内容をホストコンピュータに送り、作業の確認がなされている。
【0004】
また、上記従来のピッキングシステムを含む物品受取管理システムにおいて、受け取り作業における間違いを防止するため、保管棚に蓋体が設けられることがある。すなわち、受け取り対象となる物品が保管されている保管棚のみを開放し、その他の保管棚を閉鎖することにより、誤った物品の受け取りを防止するというものである。
【0005】
しかしながら、保管棚に蓋体を設けた場合、通常これらの蓋体は、空気圧シリンダー等により開閉されていることから、従来のシステムでこれを制御する場合、蓋がとる状態として単に「開放」か「閉鎖」を選択するのみであった。そのため、蓋体に関する精密な制御をすることができず、例えば、作業者の腕が蓋に挟まれる危険性を有する等の問題があった。
【0006】
そこで、本出願人は、保管棚等の収容空間に設けられた蓋体をより精密に制御できる物品受取管理システムおよびそのシステムに使用するターミナルを特願2008−192584として提案している。このピッキングシステムは、電気信号により回転が制御される回転軸を有し、その回転軸の周方向表面には標識が設けられ、、その標識を所定の計測位置で読み取り、その標識から得た情報に基づいて回転軸に連動する蓋体の開閉速度および開閉角度を制御するものである。また、そのシステムに使用するターミナルは、電気信号により回転が制御される回転軸を備えた棚に設置され、回転軸の周方向表面に設けられた標識を所定の計測位置で読み取り、その標識から得た情報に基づいて回転軸に連動する蓋体の開閉速度および開閉角度を制御するものである。
【0007】
そして、このシステム或いはターミナルによれば、回転軸の周方向表面に設けられた標識を所定の計測位置で読み取り、標識から得た情報に基づいて回転軸に連動する蓋体の開閉速度および開閉角度を制御するため、標識から得られる情報に回転軸の回転角度を関係付けることにより、回転軸の回転角度に応じた制御を行うことができる。例えば、完全に閉鎖する直前の角度で一端停止させ、作業者の腕を挟まないようにすることも可能となる。従って、保管棚に設けられた蓋体をより精密に制御することが可能となる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2002−12309
【特許文献2】特願2008−192584
【発明の概要】
【発明が解決しようとする課題】
【0009】
上記回転軸を利用して蓋体を開閉するシステムにおいて、その回転軸の駆動には公知の電動モータが好適であるが、多数の電動モータが同時に使用される場合、これら電動モータの起動負荷電流が接続線に同時に流れるため、接続線の導線抵抗による電圧降下が生じる。そして電圧降下が起こると、ターミナルおよび電動モータへの供給電力が不十分となり、所定の機能動作を果たさなくなるという問題があった。ただし、セル生産方式に使用される場合、多数の蓋体が同時に開く場合は殆どなく、通常の使用の範囲では電圧降下が起こる可能性は低かった。しかしながら、その一方で、システムの稼働開始前の起動時(以下、起動時と略す。)にターミナルが正常に動作することを確認する場合、全てのターミナルについての結線チェックや蓋体の動作チェックを行う必要が生じる。しかし、全ての蓋体を同時に開閉すると、供給電力の降下が生じるという問題があった。
【0010】
そこで本発明は、回転軸を利用して蓋体を開閉する物品受取管理システムの起動時に、収容空間に設けられた全てのターミナルについて、電圧降下を起こすことなくそれらの正常動作確認を行うことを可能とする起動時動作確認方法を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明に係る起動時動作確認方法は、駆動装置を介して駆動信号により回転が制御される回転軸を備えた棚に設置され、前記駆動装置に制御信号を出力するターミナルを複数備えた物品受取管理システムにおいて、前記複数のターミナルに送出される制御信号データ上の、前記複数のターミナルの各々に対応するデータ列のインデックスアドレスを、前記物品受取管理システムの起動時に把握し、前記インデックスアドレスに基づき前記ターミナルの各々について動作確認を行う。
【0012】
本発明において、インデックスアドレスとは、複数のターミナルの各々に対応するデータ列の各々を区別するためのものであり、そのデータ列における所定の位置に付与されたアドレス番号である。どの位置とするかは任意でよく、データ列の先頭や、中間、或いは最後でもよい。
【0013】
本発明において、駆動装置を介して電気信号により回転が制御される回転軸とは、例えば、電動モータで駆動する回転軸が挙げられるが、電気的に始動し或いは停止させることができるものであれば、その構成に限定はなくその他の構造であってもよい。ただし、停止を意図する信号が入力された後に、構成部品の慣性の影響を受けて即在に停止しないものは、好適ではない。一方、回転の制御として、回転の始動や停止のみでなく、回転速度の変更を行えることが好ましい。
【0014】
蓋体と回転軸との連動には公知の構造を採用することができる。例えば、回転軸に蓋体の縁辺を接続し、回転軸を中心として板状の蓋体を揺動させる構造や、布状の蓋体を吊り下げ或いは巻取る構造としてもよい。
【0015】
前記動作確認において、前記インデックスアドレスに基づいて順次起動指示を付与してもよい。そして、前記起動指示は、所定の時間間隔を空けて付与されてもよい。所定の時間間隔とは、例えば、100msec、500msecなど、特定の長さとしてもよく、また、ターミナルに制御信号を送出する制御手段との間で同期をとるための伝送クロックの所定クロック分などとしてもよい。なお、制御手段とは、多数の蓋体を一括して遠隔制御できるものであり、公知のピッキングシステムにおけるホストコンピュータやPLC(制御装置)、或いはこれら制御装置とターミナルとの間で信号変換を行う親局等が該当する。
【0016】
前記起動指示は、先に起動を始めた前記駆動装置の動作の順次完了を待って付与されてもよい。なお、駆動装置の動作は、回転軸が回転限界位置に到達した状態で完了することになる。回転限界位置には、蓋体が全開となる位置および蓋体が全閉となる位置の2種類があるが、通常は、まず蓋体が全開となる位置まで動作させ、全ての蓋体が開いた後、蓋体が全閉となる位置まで動作させることになる。
【0017】
回転軸が回転限界位置に到達したことは、回転軸の周方向表面に設けられた標識を所定の計測位置で読み取り、その標識から得た情報に基づいて判断することができる。なお、ここで用いられる標識は、回転軸の位置情報が含まれ、単独で回転軸の位置を把握できる絶対コードであってもよく、或いは、他の標識との関係から回転軸の位置を把握できる相対コードであってもよい。絶対コードとしては、二進(バイナリ)コード等を使用してもよく、また、相対コードとしては、間隔を開けて配置された複数のバーで構成したものであって、バーの通過回数をカウントする等により情報を得るものであってもよい。
【0018】
標識の読み取りには、公知の非接触型センサが好適である。例えば、回転軸に向けて光を発し、標識から反射された光の有無で光学的に標識を検知するセンサを使用してもよく、或いは、標識に磁性体を含有させ磁力線の強弱で磁気的に標識を検知するセンサ等を使用してもよい。
【0019】
前記起動指示から所定時間の経過後、起動時動作確認ができない前記ターミナルを駆動故障と判断してもよい。
【0020】
前記動作確認において、前記制御信号データにおける前記駆動装置の駆動指示が無い場合に、前記インデックスアドレスデータに対する前記ターミナルからの応答の有無により、前記複数のターミナルの各々について接続の有無を判断してもよい。
【発明の効果】
【0021】
本発明に係る起動時動作確認方法によれば、複数のターミナルに送出される制御信号データ上の、複数のターミナルの各々に対応するデータ列のインデックスアドレスを把握し、このインデックスアドレスを利用することで、複数のターミナルの各々について動作確認を、電圧降下を起こすことなく行うことができる。すなわち、ここで把握される各インデックスアドレスは、各駆動装置にそれぞれ対応するものとなるから、このインデックスアドレスに基づいて順次起動指示を付与するものとすれば、駆動装置が同時に起動することはなく、電圧降下を起こすことはない。従って、順次起動する駆動装置により収容空間に設けられた全ての蓋体を、電圧降下を起こすことなく動作させることが可能となる。また、蓋体を動作させない場合は、複数のターミナルの各々について接続有無の判断を行うことができる。
【0022】
駆動装置の起動は、順次行うものとすれば、それらのタイミングは適宜調整することができる。例えば、電圧降下は駆動装置の起動時のみが極端に大きいことを考慮し、起動のタイミングのみを順次行い、複数の駆動装置の稼動は同時に行うこととしてもよい。この場合、起動指示は、100msec、500msecなど、所定の時間間隔を開けて付与されることとなり、蓋体は時分割で平滑的に一斉に開閉することになる。
【0023】
一方、各駆動装置を別々に動作(起動、稼動および停止)させてもよい。この場合、起動指示は、先に起動を始めた前記駆動装置の動作の完了を待って付与されることとなり、蓋体は個々に開閉が完了し、全ての蓋体が順番に動作していくことになる。
【0024】
起動指示からの経過時間を利用すれば、駆動装置が故障しているかどうかの判定を行うこともできる。すなわち、起動指示から所定時間が経過後、起動時動作確認ができないターミナルは、駆動故障と判断すればよい。
【図面の簡単な説明】
【0025】
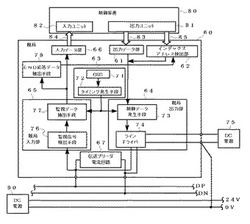
【図1】本発明に係る起動時動作確認方法を採用した物品受取管理システムに使用される親局のシステム構成図である。
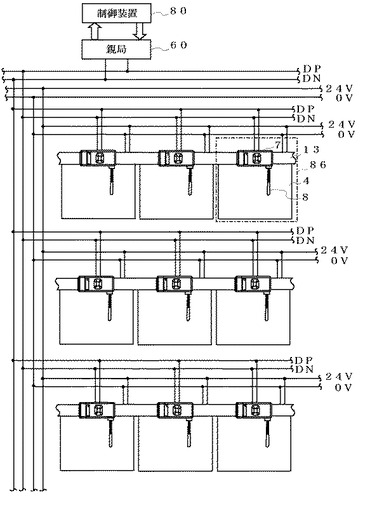
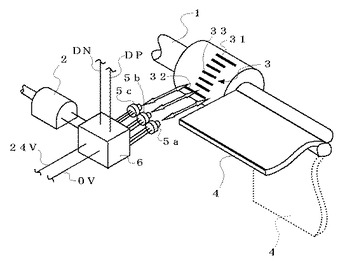
【図2】同物品受取管理システムが採用された保管棚の概観を示す正面図である。
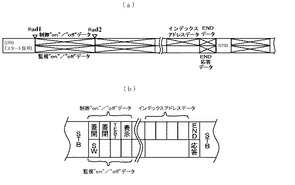
【図3】同物品受取管理システムにおいてターミナルと親局との間で送受信される制御監視信号を示し、(a)は複数のターミナルについてのデータ列を一連に示す模式図、(b)は一つのターミナルについてのデータ列を拡大して示す模式図である。
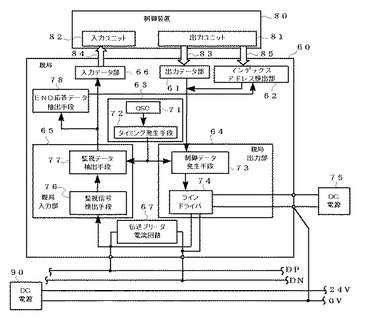
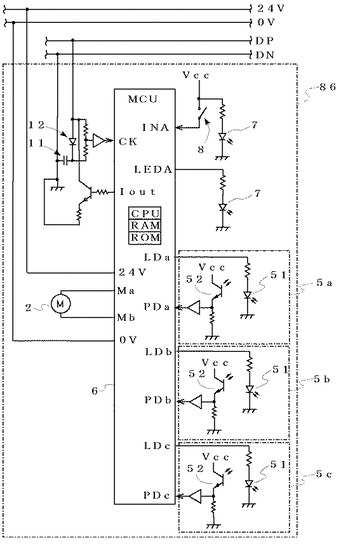
【図4】同物品受取管理システムに使用されるターミナルのブロック図である。
【図5】標識を計測して回転軸の回転を制御する構造を概念的に示す斜視図である。
【発明を実施するための形態】
【0026】
図1〜5を参照しながら、本発明に係る起動時動作確認方法の実施例を説明する。なお、図5は、構造を概念的に示すものであり、その構造の理解を容易にするために所定の部位が拡大され、また各部位の位置関係が調整されて示されているため、各部位の相対的な大きさや位置は図2に示すターミナルと一致していない。また、図5では、説明の便宜上、レバースイッチ及び表示ランプの図示は省略されている。
【0027】
まず、本発明に係る起動時動作確認方法を採用した物品受取管理システムの構成について説明する。この物品受取管理システムは、保管棚の収容空間に保管された物品の管理を行うためのもので、制御装置80、親局60および複数のターミナル86で構成されている。親局60が、本発明の制御手段に相当する。
【0028】
ターミナル86は、図2に示すように、保管棚のパイプラック13に固定され、共通のデータ信号線DP、DNおよび電力供給線24V、0Vに接続されている。電力供給線24V、0Vを介し供給される電力は、後述の電動モータ2の駆動源となる。データ信号線DP、DNには親局60が接続され、更に親局60は制御装置80に接続されている。
【0029】
ターミナル86は、また、作業者への指示を行うための表示ランプ7と、作業の確認を行うためのレバースイッチ8を備えている。表示ランプ7は、前記制御装置80の制御の下で動作し、また、レバースイッチ8のオンオフ状態は制御装置80で把握できるものとなっている。
【0030】
このターミナル86が設置される保管棚は、図5に示す構造の回転軸1を備える。回転軸1は、図示が省略されているギアを介し電動モータ2に連結され、電動モータ2を駆動信号により制御することで、その回転が制御されるものとなっている。なお、電動モータ2が本発明の駆動装置に相当する。
【0031】
回転軸1には、更に、保管棚を開閉する板状の蓋体4が接合されている。この蓋体4は1つの縁辺が回転軸1の長さ方向に沿って接合されており、回転軸1の回転により回転軸1を中心として揺動するものとなっている。
【0032】
制御装置80と親局60は並列信号により高速でデータの授受を行っている。制御装置80から親局60に対しては、出力ユニット81から並列(パラレル)データである制御信号データ83と、起動時動作確認を行うための動作確認信号データ85が送出される。また、親局60の入力データ部66から制御装置80の入力ユニット82に対しては、並列(パラレル)データである監視信号データ84が送出される。親局60は、データ信号線DP、DNを介し、複数のターミナル86とデータを共有している。そして、制御装置80が親局60を介し、全ての制御・監視データを掌握できる構成となっている。
【0033】
図1に示すように、親局60は、出力データ部61、インデックスアドレス検出部62、タイミング発生部63、親局出力部64、親局入力部65、入力データ部66およびEND応答データ抽出部78を備える。出力データ部61は、制御装置80の出力ユニット81から制御信号データ83として受けた並列データを親局出力部64へ引き渡す。この制御信号データ83は、例えば、表示ランプ7の点灯消灯や蓋体4の開閉等の指示を行うものである。
【0034】
インデックスアドレス検出部62は、その内部に備えてある内部メモリの中に、インデックスアドレスデータを記憶し、制御装置80の出力ユニット81から受けた動作確認信号データ85を受けて、起動指示を行うべきターミナル86のアドレスを親局出力部64へ引き渡す。なお、インデックスアドレスデータについては、後述する。
【0035】
タイミング発生部63は、発振回路(OSC)71とタイミング発生手段72からなり、OSC71からクロック信号の基本信号を得たタイミング発生手段72が、クロック信号を生成し親局出力部64に引き渡す。親局出力部64は、制御データ発生手段73とラインドライバ74からなり、制御データ発生手段73が、出力データ部61から受けたデータと、タイミング発生部63から受けたクロック信号に基づき制御信号を生成し、ラインドライバ74を介して共通データ信号線DP、DNに送出する。
【0036】
ラインドライバ74は、また、DC電源75から電源供給を受け、制御信号とともに、共通データ信号線DP、DNを経由し、ターミナル86用の回路電源を供給する。なお、前記電動モータ2の駆動用電源は、別のDC電源90から電源供給線24V、0Vに供給される。
【0037】
親局入力部65は監視信号検出手段76と監視データ抽出手段77で構成され、入力データ部66へ入力データ信号を送出する。監視信号検出手段76は、共通データ信号線DP、DNを経由してターミナル86から送出された監視信号を検出する。ターミナル86から送出される監視信号は、レバースイッチ8の作動の有無が電流の有無で表わされており、スタート信号STBが送信された後、各ターミナル86から順次受け取るものとなっている。監視信号の監視データは、タイミング発生手段72の信号に同期して監視データ抽出手段77で抽出され、直列の入力データ信号として入力データ部66に送出される。入力データ部61は、親局入力部65から受け取った入力データ信号を並列(パラレル)データに変換し、監視信号データ84として制御装置80の入力ユニット82へ送出する。
【0038】
親局60は、また、伝送インターフェイス回路として、伝送ブリーダ電流回路67を有する。伝送ブリーダ電流回路67は、親局出力部64内のラインドライバ74に接続されており、共通データ信号線DPとDN間の伝送路を安定化させるものである。
【0039】
各ターミナル86では、親局60から送出された制御信号から制御データを抽出し、制御装置80から指示された処理、例えば表示ランプ7の点灯消灯や蓋体4の開閉を行う。蓋体4を開閉する場合であれば、電動モータ2に駆動電気信号を送出し始動させる。また、上記のように、各保管棚の状態を監視信号として親局60に送出する。例えば、保管棚から物品を取り出した作業者がレバースイッチ8をオン状態にすると、その信号が監視信号としてデータ信号線DP、DNに送出される。
【0040】
このターミナル86では、監視信号は、上記の通り電流信号として送出される。図4に示すように、ターミナル86は、データ信号線DPとDNの間に並列に挿入されたコンデンサ11を有し、パルス状電圧信号である制御信号における低電圧期間に、このコンデンサ11が放電すること利用し、監視信号としての電流信号を送出するものとなっている。なお、コンデンサ11のデータ信号線DP側端子とデータ信号線DPとの間にはダイオード12が挿入されているため、制御信号における高電圧期間は、データ信号線DPからダイオード12を介してデータ信号線DN側へ充電電流が流れ、コンデンサ11が充電される。一方、制御信号における低電圧期間は、ダイオード12がオフしてデータ信号線DPからデータ信号線DNへ、コンデンサ11を充電するための電流は流れない(遮断される)。従って、低電圧期間に、コンデンサ11が放電して、制御信号の低電圧期間に電流信号を重畳することができる。つまり、同一伝送クロック期間で、親局60とターミナル86の双方向データ伝送が実現できる(全2重伝送)。
【0041】
図3に示すように、親局60から送出する制御データは、スタート信号STBとこれに続く1番目(#ad1)のターミナル86の制御”on”/”off”データ部、更にこれに続く2番目(#ad2)のターミナル86の制御”on”/”off”データ部、そして、以降同様に、n番目のターミナル86の制御”on”/”off”データ部まで続き、更にその後の、インデックスアドレスデータ部、およびエンド信号ENDで構成される。ターミナル86から親局60に向けて送出する監視”on”/”off”データ部は制御”on”/”off”データ部期間内に同時に行われる。また親局60と各ターミナル86との間での伝送は、システムの作動中に繰り返し行われる。
【0042】
図3において、上段の制御”on”/”off”データ部は親局60から送出される制御データであり、下段の監視”on”/”off”データ部はターミナル86から送出される監視データである。例えば、制御”on”/”off”データ部における制御データの最初のビットは蓋体4を開けることを指示するデータであり、蓋体4を開ける場合は”on”と、そうでなければ”off”とされる。一方、監視データの最初のビットは、レバースイッチ8の状態を示し、レバースイッチ8の状態により”on”または”off”とされる。
【0043】
インデックスアドレスデータ部の値(上段の制御データ)は、この物品受取管理システムの電源投入起動時において、スタート信号STBとこれに続く制御”on”/”off”データ部および監視”on”/”off”データ部、インデックスアドレスデータ部、エンド信号ENDで構成される伝送サイクル毎に、ターミナル86における最大アドレス値に達するまで1ずつ加算される。なお、図3において、インデックスアドレスデータ部は4bitとされているが、その幅に制限はなく、ターミナル86の数に応じて決めることができる。各ターミナル86では、自局に割り当てられた先頭アドレスが、インデックスアドレスデータ部のデータ値と一致する場合、そのターミナル86はENDデータに対して”on”の応答を返す。一致しない場合は”off”の応答を返す。END応答(END下段)が”on”であった場合は、親局60のEND応答データ抽出部78で抽出され、その先頭アドレスが、インデックスアドレス検出部62の内部に備えてある内部メモリの中にインデックスアドレスデータとして、記憶される。
【0044】
物品受取管理システムの起動時に、インデックスアドレス検出部62に記憶された各ターミナル86のインデックスアドレスデータは、起動時動作確認方法に用いられるものとなる。すなわち、ここでインデックスアドレスデータから把握される各先頭アドレスは、ターミナル86の各駆動装置にそれぞれ対応するものとなるから、このインデックスアドレスデータに対応するターミナル86に対し順次起動指示を付与するものとすれば、駆動装置が同時に起動することはなく、電圧降下を起こすことはない。以下、この物品受取管理システムにおける起動時動作確認方法について説明する。
【0045】
物品受取管理システムが起動されると、親局60はインデックスアドレス検出部62の内部に記憶されているインデックスアドレスデータ群の中から最初の所定インデックスアドレスデータの一つを選択し、図3に表記してあるインデックスアドレスデータとして伝送サイクル毎に、ターミナル86に伝送する。各ターミナル86では、自局の先頭アドレスがこのデータ値と一致する場合、ENDデータに対するEND応答データを返す。親局60から送出される制御”on”/”off”データ部の“TEST”データが”off“の場合、つまり通常動作時では、親局から送出するインデックスアドレスデータに対してターミナル86がEND応答データを”on“で返した場合は、ターミナル86が接続されていることとなる。END応答データが”off“である場合は、ターミナル86が接続されてないことになる。
【0046】
全扉の開閉動作が正常かどうかをチェックする場合は、制御装置80は動作確認データ85でその開放指示を行う。この時、親局60から送出する制御”on”/”off”データ部の“TEST”データ(図3において、制御”on”/”off”データ部の先頭から3番目)は”on“となる。各ターミナル86では、制御”on”/”off”データ部の“TEST”データが“on”の時は、自局の先頭アドレスがインデックスアドレスデータ部のデータ値と一致した場合、制御”on”/”off”データ部の“扉開”データが“on”の時は、電動モータ2を正転起動し、蓋体4を開放する。そして、その蓋体4を開放したターミナル86は、後述のエンド表示32を検出した時に、ENDデータに対するEND応答データ“on”を親局に送出する。END応答データ“on”を受け取った親局60は、制御”on”/”off”データ部の“扉開”データを“off”とする。
【0047】
インデックスアドレス検出部62は、予め設定された時間が経過した後、記憶されているインデックスアドレスデータのうち、次のデータ値を選択し、図3に表記してあるインデックスアドレスデータとして伝送サイクル毎に、ターミナル86に伝送する。次の対応するターミナル86では、制御”on”/”off”データ部の“TEST”データが“on”の時は、自局の先頭アドレスがこのデータ値と一致した場合、制御”on”/”off”データ部の“扉開”データが“on”の時は、電動モータ2を正転起動し、蓋体4を開放する。そして、その蓋体4を開放したターミナル86は、後述のエンド表示32を検出した時に、ENDデータに対するEND応答データ“on”を親局に送出し、電動モータ2を停止する。END応答データ“on”を受け取った親局60は、制御”on”/”off”データ部の“扉開”データを“off”とする。
【0048】
以降、インデックスアドレス検出部62に記憶されている全部のインデックスアドレスデータに対して、同様な動作を繰り返す。全部のターミナル86からのEND応答データ“on”をインデックスアドレス検出部62が確認すると、全部のターミナル86の扉体4が開放したと見なすことができる。END応答データ“on”がある一定時間内に完了とならない場合は、駆動系の異常を検知できる。
【0049】
全ての蓋体4が開放されたら、制御装置80は次の動作確認信号データ85で扉体4の閉鎖指示を行う。この時、親局60から送出する制御”on”/”off”データ部の“TEST”データ(図3において、制御”on”/”off”データ部の先頭から3番目)は”on“となる。各ターミナル86では、制御”on”/”off”データ部の“TEST”データが”on“の時は、自局の先頭アドレスがこのデータ値と一致した場合、制御”on”/”off”データ部の“扉閉”データが“on”の時は、電動モータ2を逆転起動し、蓋体4を閉鎖する。そして、蓋体4を閉鎖したターミナル86が後述のスタート表示31を検出した時に、ENDデータに対するEND応答データ“on”を親局に送出し、電動モータ2を停止する。END応答データ“on”を受け取った親局60は、制御”on”/”off”データ部の“扉閉”データを“off”とする。
【0050】
以降、インデックスアドレス検出部62に記憶されている全部のインデックスアドレスデータに対して、同様な動作を繰り返す。全部のターミナル86からのEND応答データ“on”をインデックスアドレス検出部62が確認すると、全部のターミナル86の扉体4が閉鎖したと見なすことができる。END応答データ“on”がある一定時間内に完了とならない場合は、駆動系の異常を検知できる。
【0051】
この動作確認方法では、複数の電動モータ2が同時に起動することはなく、電圧降下を起こすことはない。従って、順次起動する電動モータ2により収容空間に設けられた全ての蓋体4を、電圧降下を起こすことなく動作させることが可能となる。なお、インデックスアドレス検出部62からのインデックスアドレスデータが次のデータ値に切り替わる時間間隔は、100msec、500msecなど、状況に応じた設定とすることができる。
【0052】
インデックスアドレス検出部62からのインデックスアドレスデータが次のデータ値に切り替わる時間間隔は、先に駆動した電動モータ2の動作の完了を待って行ってもよい。
【0053】
電動モータ2の動作が終了したことを示す情報は、回転軸1に設けた標識3を利用して知ることができる。以下、その方法について説明する。
【0054】
図5に示すように、回転軸1には、その周方向表面に、間隔を開けて配置された複数のバーで構成される標識3が設けられている。また、回転軸1の軸線と直交し標識3と重なり合う位置には、非接触型センサとして3個の光センサ5a、5b、5cが回転軸1の長さ方向に等間隔で配置されている。これら光センサ5a、5b、5cは、発光ダイオード51とフォトトランジスタ52とから構成される公知のもので、標識3とそれ以外の部分との濃淡の差を利用して、標識3を読み取ることができる。
【0055】
標識3は複数のバーで構成され、周方向の両端に配置されたスタート表示31およびエンド表示32と、これらスタート表示31とエンド表示32との間に配置された複数の角度表示33とを有している。スタート表示31およびエンド表示32は、好ましい回転角度の上限値と下限値である。従って、これらの表示が所定の位置に達した場合、回転軸1の回転を停止させる必要がある。すなわち、これらの表示が所定の位置に達したときが電動モータ2の停止タイミングとなる。
【0056】
スタート表示31およびエンド表示32は、角度表示33よりも、その一端が回転軸1の長さ方向に突出している。ただし、突出する端部は、スタート表示31とエンド表示32とで異なっており、光センサ5を背にして見た場合、スタート表示31は右方向(蓋体4側)に、エンド表示32は左側(電動モータ2側)に突出している。そして、角度表示33が中央に配置された光センサ5bのみで読み取られるのに対し、スタート表示31は光センサ5bと蓋体4側に配置された光センサ5aの2個で読み取られ、エンド表示32は光センサ5bと電動モータ2側に配置された光センサ5cの2個で読み取られるものとなっている。そのため、3個の光センサ5a、5b、5cの読み取りパターンにより、回転限界であることおよびスタート表示31側かエンド表示32側かを検知できる。すなわち、スタート表示31およびエンド表示32が所定の位置に達したことを検知でき、電動モータ2の動作が終了したことを示す情報を得ることができる。
【0057】
なお、角度表示33は、所望の制御形態に応じてその数を適宜調整すればよく、例えば、制御範囲(スタート表示31とエンド表示32とで挟まれた範囲)が120度で、45度毎に精密な制御を行いたい場合、45度間隔で5個の角度表示33を配置すれば良い。この場合、例えば、スタート表示31から回転を開始し、角度表示33が2個通過するまでは回転速度を遅くし、次の2個が通過するまでは回転角度を速くし、エンド表示32までは再び回転速度を遅くし作業者の安全を図る等の制御が可能となる。
【0058】
図4に示すように、ターミナル86は、光センサ5a、5b、5c、マイクロコンピュータ・コントロール・ユニット(MCU)6を備える。そして、光センサ5a、5b、5cは、標識3を読み取ったとき、MCU6にパルス信号PDa、PDb、PDcを出力する。MCU6は、CPU、RAM、ROMを備え、演算機能を有しており、制御に必要な情報を得るための処理を行う。図5に示す標識3は相対コードであり、各表示31、32、33自体には位置情報が含まれていないことから、MCU6は光センサ5bからのパルス信号PDbをカウントし、光センサ5bが配置された計測位置に標識3が到達した回数(到達回数)を記憶する。なお、光センサ5aはスタート信号表示31のみを、光センサ5cはエンド信号表示32のみを読み取るため、光センサ5a、5cからのパルス信号PDa、PDcの有無は、回転限界の制御におけるスイッチ信号とされている。
【0059】
MCU6には、電動モータ2の制御処理を行う到達回数が予め記憶されており、回数値がその記憶された値に達するまでカウントを続ける。そして、到達回数が所定の値に達すると、記憶されている制御処理を行うために、電動モータ2へ駆動信号を出力する。例えば、図5に示す標識3の場合、スタート表示31が初期状態、すなわち角度が0度の状態で回転が開始された場合、標識3の到達回数が2回に達したとき電動モータ2へ回転速度を上げる駆動信号を出力し、到達回数が4回に達したとき回転速度を下げる駆動信号を出力し、到達回数が6回に達したとき電動モータ2の駆動信号を停止する。なお、MCU6から駆動信号が送られてから電動モータ2が停止するまでにタイムラグが生じる場合は、MCU6から駆動信号を出力するタイミングをずらしてもよい。例えば、到達回数が5回に達したときに、電動モータ2への駆動信号を停止しても良い。
【0060】
このように、標識3の計測位置への到達回数により電動モータ2の制御を行うことにより、回転軸1に接合され回転軸1に連動する前記蓋体4の動作を制御することができる。例えば、図5に示すように、回転開始時において回転軸1から垂下し保管棚を閉鎖する状態(図5の破線で示す状態)にある蓋体4を、標識3が計測位置に所定回数到達するまで回転軸1を回転させることで、上向きに傾斜し保管棚を開放する状態にすることができる。なお、保管棚を開放する状態から閉鎖する状態へ戻すときも同様である。
【符号の説明】
【0061】
1 回転軸
2 電動モータ
3 標識
4 蓋体
5a、5b、5c 光センサ
6 MCU
7 表示ランプ
8 レバースイッチ
11 コンデンサ
12 ダイオード
13 パイプラック
14 読み取り機構
15 駆動機構
31 スタート表示
32 エンド表示
33 角度表示
51 発光ダイオード
52 フォトトランジスタ
60 親局
61 出力データ部
62 インデックスアドレス検出部
63 タイミング発生部
64 親局出力部
65 親局入力部
66 入力データ部
67 伝送部リーダ電流回路
71 発信器
72 タイミング発生手段
73 制御データ発生手段
74 ラインドライバ
75、90 DC電源
76 監視信号検出手段
77 監視データ抽出手段
78 END応答データ抽出部
80 制御装置
81 出力ユニット
82 入力ユニット
83 制御信号データ
84 監視信号データ
85 起動動作確認データ
86 ターミナル
【技術分野】
【0001】
本発明は、物品の保管棚等の収容空間に蓋体を設け、その収容空間に保管している物品の中から、適切な物品、例えば、製品の組立てに必要な部品の受け取りや補給の指示を蓋体の開閉動作によって制御する物品受取管理システムにおいて、システムの起動時動作の確認を行うための方法に関する。
【背景技術】
【0002】
物品受取管理システムの代表的な例として、組立て生産工程、特にセル生産方式による工程等において広く使用されているピッキングシステムがある。このピッキングシステムとは、物品の保管棚に保管している物品の中から製品の組立てに必要な部品を受け取る作業や、逆に保管棚へ補給する作業の指示を制御するものである。より具体的には、物品が配置されていることを表示するとともに、その物品が搬出されたことを内容とする通知情報の入力手段を備えたターミナルを複数の保管棚の各々に配置し、これらターミナルを、制御装置を介してホストコンピュータに接続した構成をとるものである。そして、ホストコンピュータは部品の引取り指示を制御装置に送信し、制御装置が引取り指示の出された部品引き渡し棚に装着された前記ターミナルのランプや表示器により指示状態を表すようにしている。一方、指示された部品を引取り完了した作業者は、引取り完了入力として、ターミナルのレバースイッチを操作し、その操作信号が前記制御装置を経由し、ホストコンピュータに届くようになっており、作業の進捗や、誤作業の防止や、部品引き渡し棚への部品の補給、更には部品の在庫管理や、補給部品の発注などが行われる仕組みとなっている。なお、ターミナルにおける表示器や確認スイッチの形式には様々なものが採用されている。
【0003】
セル生産方式、すなわち、一人の作業員が複数の工程を担当とする方式は、近年広まっている方式であるが、そこに使用されるピッキングシステムとして、例えば、特開2002−12309号公報に開示された、冷蔵冷凍倉庫の冷凍品について寒冷域における集中表示式商品格納・ピッキングシステムがある。このシステムでは、物品保管する商品倉庫や、冷蔵冷凍倉庫の棚に配列された多数の物品について、ホストコンピュータと格納された物品の取り出し(ピッキング)作業をスイッチ入力し、その作業内容をホストコンピュータに送り、作業の確認がなされている。
【0004】
また、上記従来のピッキングシステムを含む物品受取管理システムにおいて、受け取り作業における間違いを防止するため、保管棚に蓋体が設けられることがある。すなわち、受け取り対象となる物品が保管されている保管棚のみを開放し、その他の保管棚を閉鎖することにより、誤った物品の受け取りを防止するというものである。
【0005】
しかしながら、保管棚に蓋体を設けた場合、通常これらの蓋体は、空気圧シリンダー等により開閉されていることから、従来のシステムでこれを制御する場合、蓋がとる状態として単に「開放」か「閉鎖」を選択するのみであった。そのため、蓋体に関する精密な制御をすることができず、例えば、作業者の腕が蓋に挟まれる危険性を有する等の問題があった。
【0006】
そこで、本出願人は、保管棚等の収容空間に設けられた蓋体をより精密に制御できる物品受取管理システムおよびそのシステムに使用するターミナルを特願2008−192584として提案している。このピッキングシステムは、電気信号により回転が制御される回転軸を有し、その回転軸の周方向表面には標識が設けられ、、その標識を所定の計測位置で読み取り、その標識から得た情報に基づいて回転軸に連動する蓋体の開閉速度および開閉角度を制御するものである。また、そのシステムに使用するターミナルは、電気信号により回転が制御される回転軸を備えた棚に設置され、回転軸の周方向表面に設けられた標識を所定の計測位置で読み取り、その標識から得た情報に基づいて回転軸に連動する蓋体の開閉速度および開閉角度を制御するものである。
【0007】
そして、このシステム或いはターミナルによれば、回転軸の周方向表面に設けられた標識を所定の計測位置で読み取り、標識から得た情報に基づいて回転軸に連動する蓋体の開閉速度および開閉角度を制御するため、標識から得られる情報に回転軸の回転角度を関係付けることにより、回転軸の回転角度に応じた制御を行うことができる。例えば、完全に閉鎖する直前の角度で一端停止させ、作業者の腕を挟まないようにすることも可能となる。従って、保管棚に設けられた蓋体をより精密に制御することが可能となる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2002−12309
【特許文献2】特願2008−192584
【発明の概要】
【発明が解決しようとする課題】
【0009】
上記回転軸を利用して蓋体を開閉するシステムにおいて、その回転軸の駆動には公知の電動モータが好適であるが、多数の電動モータが同時に使用される場合、これら電動モータの起動負荷電流が接続線に同時に流れるため、接続線の導線抵抗による電圧降下が生じる。そして電圧降下が起こると、ターミナルおよび電動モータへの供給電力が不十分となり、所定の機能動作を果たさなくなるという問題があった。ただし、セル生産方式に使用される場合、多数の蓋体が同時に開く場合は殆どなく、通常の使用の範囲では電圧降下が起こる可能性は低かった。しかしながら、その一方で、システムの稼働開始前の起動時(以下、起動時と略す。)にターミナルが正常に動作することを確認する場合、全てのターミナルについての結線チェックや蓋体の動作チェックを行う必要が生じる。しかし、全ての蓋体を同時に開閉すると、供給電力の降下が生じるという問題があった。
【0010】
そこで本発明は、回転軸を利用して蓋体を開閉する物品受取管理システムの起動時に、収容空間に設けられた全てのターミナルについて、電圧降下を起こすことなくそれらの正常動作確認を行うことを可能とする起動時動作確認方法を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明に係る起動時動作確認方法は、駆動装置を介して駆動信号により回転が制御される回転軸を備えた棚に設置され、前記駆動装置に制御信号を出力するターミナルを複数備えた物品受取管理システムにおいて、前記複数のターミナルに送出される制御信号データ上の、前記複数のターミナルの各々に対応するデータ列のインデックスアドレスを、前記物品受取管理システムの起動時に把握し、前記インデックスアドレスに基づき前記ターミナルの各々について動作確認を行う。
【0012】
本発明において、インデックスアドレスとは、複数のターミナルの各々に対応するデータ列の各々を区別するためのものであり、そのデータ列における所定の位置に付与されたアドレス番号である。どの位置とするかは任意でよく、データ列の先頭や、中間、或いは最後でもよい。
【0013】
本発明において、駆動装置を介して電気信号により回転が制御される回転軸とは、例えば、電動モータで駆動する回転軸が挙げられるが、電気的に始動し或いは停止させることができるものであれば、その構成に限定はなくその他の構造であってもよい。ただし、停止を意図する信号が入力された後に、構成部品の慣性の影響を受けて即在に停止しないものは、好適ではない。一方、回転の制御として、回転の始動や停止のみでなく、回転速度の変更を行えることが好ましい。
【0014】
蓋体と回転軸との連動には公知の構造を採用することができる。例えば、回転軸に蓋体の縁辺を接続し、回転軸を中心として板状の蓋体を揺動させる構造や、布状の蓋体を吊り下げ或いは巻取る構造としてもよい。
【0015】
前記動作確認において、前記インデックスアドレスに基づいて順次起動指示を付与してもよい。そして、前記起動指示は、所定の時間間隔を空けて付与されてもよい。所定の時間間隔とは、例えば、100msec、500msecなど、特定の長さとしてもよく、また、ターミナルに制御信号を送出する制御手段との間で同期をとるための伝送クロックの所定クロック分などとしてもよい。なお、制御手段とは、多数の蓋体を一括して遠隔制御できるものであり、公知のピッキングシステムにおけるホストコンピュータやPLC(制御装置)、或いはこれら制御装置とターミナルとの間で信号変換を行う親局等が該当する。
【0016】
前記起動指示は、先に起動を始めた前記駆動装置の動作の順次完了を待って付与されてもよい。なお、駆動装置の動作は、回転軸が回転限界位置に到達した状態で完了することになる。回転限界位置には、蓋体が全開となる位置および蓋体が全閉となる位置の2種類があるが、通常は、まず蓋体が全開となる位置まで動作させ、全ての蓋体が開いた後、蓋体が全閉となる位置まで動作させることになる。
【0017】
回転軸が回転限界位置に到達したことは、回転軸の周方向表面に設けられた標識を所定の計測位置で読み取り、その標識から得た情報に基づいて判断することができる。なお、ここで用いられる標識は、回転軸の位置情報が含まれ、単独で回転軸の位置を把握できる絶対コードであってもよく、或いは、他の標識との関係から回転軸の位置を把握できる相対コードであってもよい。絶対コードとしては、二進(バイナリ)コード等を使用してもよく、また、相対コードとしては、間隔を開けて配置された複数のバーで構成したものであって、バーの通過回数をカウントする等により情報を得るものであってもよい。
【0018】
標識の読み取りには、公知の非接触型センサが好適である。例えば、回転軸に向けて光を発し、標識から反射された光の有無で光学的に標識を検知するセンサを使用してもよく、或いは、標識に磁性体を含有させ磁力線の強弱で磁気的に標識を検知するセンサ等を使用してもよい。
【0019】
前記起動指示から所定時間の経過後、起動時動作確認ができない前記ターミナルを駆動故障と判断してもよい。
【0020】
前記動作確認において、前記制御信号データにおける前記駆動装置の駆動指示が無い場合に、前記インデックスアドレスデータに対する前記ターミナルからの応答の有無により、前記複数のターミナルの各々について接続の有無を判断してもよい。
【発明の効果】
【0021】
本発明に係る起動時動作確認方法によれば、複数のターミナルに送出される制御信号データ上の、複数のターミナルの各々に対応するデータ列のインデックスアドレスを把握し、このインデックスアドレスを利用することで、複数のターミナルの各々について動作確認を、電圧降下を起こすことなく行うことができる。すなわち、ここで把握される各インデックスアドレスは、各駆動装置にそれぞれ対応するものとなるから、このインデックスアドレスに基づいて順次起動指示を付与するものとすれば、駆動装置が同時に起動することはなく、電圧降下を起こすことはない。従って、順次起動する駆動装置により収容空間に設けられた全ての蓋体を、電圧降下を起こすことなく動作させることが可能となる。また、蓋体を動作させない場合は、複数のターミナルの各々について接続有無の判断を行うことができる。
【0022】
駆動装置の起動は、順次行うものとすれば、それらのタイミングは適宜調整することができる。例えば、電圧降下は駆動装置の起動時のみが極端に大きいことを考慮し、起動のタイミングのみを順次行い、複数の駆動装置の稼動は同時に行うこととしてもよい。この場合、起動指示は、100msec、500msecなど、所定の時間間隔を開けて付与されることとなり、蓋体は時分割で平滑的に一斉に開閉することになる。
【0023】
一方、各駆動装置を別々に動作(起動、稼動および停止)させてもよい。この場合、起動指示は、先に起動を始めた前記駆動装置の動作の完了を待って付与されることとなり、蓋体は個々に開閉が完了し、全ての蓋体が順番に動作していくことになる。
【0024】
起動指示からの経過時間を利用すれば、駆動装置が故障しているかどうかの判定を行うこともできる。すなわち、起動指示から所定時間が経過後、起動時動作確認ができないターミナルは、駆動故障と判断すればよい。
【図面の簡単な説明】
【0025】
【図1】本発明に係る起動時動作確認方法を採用した物品受取管理システムに使用される親局のシステム構成図である。
【図2】同物品受取管理システムが採用された保管棚の概観を示す正面図である。
【図3】同物品受取管理システムにおいてターミナルと親局との間で送受信される制御監視信号を示し、(a)は複数のターミナルについてのデータ列を一連に示す模式図、(b)は一つのターミナルについてのデータ列を拡大して示す模式図である。
【図4】同物品受取管理システムに使用されるターミナルのブロック図である。
【図5】標識を計測して回転軸の回転を制御する構造を概念的に示す斜視図である。
【発明を実施するための形態】
【0026】
図1〜5を参照しながら、本発明に係る起動時動作確認方法の実施例を説明する。なお、図5は、構造を概念的に示すものであり、その構造の理解を容易にするために所定の部位が拡大され、また各部位の位置関係が調整されて示されているため、各部位の相対的な大きさや位置は図2に示すターミナルと一致していない。また、図5では、説明の便宜上、レバースイッチ及び表示ランプの図示は省略されている。
【0027】
まず、本発明に係る起動時動作確認方法を採用した物品受取管理システムの構成について説明する。この物品受取管理システムは、保管棚の収容空間に保管された物品の管理を行うためのもので、制御装置80、親局60および複数のターミナル86で構成されている。親局60が、本発明の制御手段に相当する。
【0028】
ターミナル86は、図2に示すように、保管棚のパイプラック13に固定され、共通のデータ信号線DP、DNおよび電力供給線24V、0Vに接続されている。電力供給線24V、0Vを介し供給される電力は、後述の電動モータ2の駆動源となる。データ信号線DP、DNには親局60が接続され、更に親局60は制御装置80に接続されている。
【0029】
ターミナル86は、また、作業者への指示を行うための表示ランプ7と、作業の確認を行うためのレバースイッチ8を備えている。表示ランプ7は、前記制御装置80の制御の下で動作し、また、レバースイッチ8のオンオフ状態は制御装置80で把握できるものとなっている。
【0030】
このターミナル86が設置される保管棚は、図5に示す構造の回転軸1を備える。回転軸1は、図示が省略されているギアを介し電動モータ2に連結され、電動モータ2を駆動信号により制御することで、その回転が制御されるものとなっている。なお、電動モータ2が本発明の駆動装置に相当する。
【0031】
回転軸1には、更に、保管棚を開閉する板状の蓋体4が接合されている。この蓋体4は1つの縁辺が回転軸1の長さ方向に沿って接合されており、回転軸1の回転により回転軸1を中心として揺動するものとなっている。
【0032】
制御装置80と親局60は並列信号により高速でデータの授受を行っている。制御装置80から親局60に対しては、出力ユニット81から並列(パラレル)データである制御信号データ83と、起動時動作確認を行うための動作確認信号データ85が送出される。また、親局60の入力データ部66から制御装置80の入力ユニット82に対しては、並列(パラレル)データである監視信号データ84が送出される。親局60は、データ信号線DP、DNを介し、複数のターミナル86とデータを共有している。そして、制御装置80が親局60を介し、全ての制御・監視データを掌握できる構成となっている。
【0033】
図1に示すように、親局60は、出力データ部61、インデックスアドレス検出部62、タイミング発生部63、親局出力部64、親局入力部65、入力データ部66およびEND応答データ抽出部78を備える。出力データ部61は、制御装置80の出力ユニット81から制御信号データ83として受けた並列データを親局出力部64へ引き渡す。この制御信号データ83は、例えば、表示ランプ7の点灯消灯や蓋体4の開閉等の指示を行うものである。
【0034】
インデックスアドレス検出部62は、その内部に備えてある内部メモリの中に、インデックスアドレスデータを記憶し、制御装置80の出力ユニット81から受けた動作確認信号データ85を受けて、起動指示を行うべきターミナル86のアドレスを親局出力部64へ引き渡す。なお、インデックスアドレスデータについては、後述する。
【0035】
タイミング発生部63は、発振回路(OSC)71とタイミング発生手段72からなり、OSC71からクロック信号の基本信号を得たタイミング発生手段72が、クロック信号を生成し親局出力部64に引き渡す。親局出力部64は、制御データ発生手段73とラインドライバ74からなり、制御データ発生手段73が、出力データ部61から受けたデータと、タイミング発生部63から受けたクロック信号に基づき制御信号を生成し、ラインドライバ74を介して共通データ信号線DP、DNに送出する。
【0036】
ラインドライバ74は、また、DC電源75から電源供給を受け、制御信号とともに、共通データ信号線DP、DNを経由し、ターミナル86用の回路電源を供給する。なお、前記電動モータ2の駆動用電源は、別のDC電源90から電源供給線24V、0Vに供給される。
【0037】
親局入力部65は監視信号検出手段76と監視データ抽出手段77で構成され、入力データ部66へ入力データ信号を送出する。監視信号検出手段76は、共通データ信号線DP、DNを経由してターミナル86から送出された監視信号を検出する。ターミナル86から送出される監視信号は、レバースイッチ8の作動の有無が電流の有無で表わされており、スタート信号STBが送信された後、各ターミナル86から順次受け取るものとなっている。監視信号の監視データは、タイミング発生手段72の信号に同期して監視データ抽出手段77で抽出され、直列の入力データ信号として入力データ部66に送出される。入力データ部61は、親局入力部65から受け取った入力データ信号を並列(パラレル)データに変換し、監視信号データ84として制御装置80の入力ユニット82へ送出する。
【0038】
親局60は、また、伝送インターフェイス回路として、伝送ブリーダ電流回路67を有する。伝送ブリーダ電流回路67は、親局出力部64内のラインドライバ74に接続されており、共通データ信号線DPとDN間の伝送路を安定化させるものである。
【0039】
各ターミナル86では、親局60から送出された制御信号から制御データを抽出し、制御装置80から指示された処理、例えば表示ランプ7の点灯消灯や蓋体4の開閉を行う。蓋体4を開閉する場合であれば、電動モータ2に駆動電気信号を送出し始動させる。また、上記のように、各保管棚の状態を監視信号として親局60に送出する。例えば、保管棚から物品を取り出した作業者がレバースイッチ8をオン状態にすると、その信号が監視信号としてデータ信号線DP、DNに送出される。
【0040】
このターミナル86では、監視信号は、上記の通り電流信号として送出される。図4に示すように、ターミナル86は、データ信号線DPとDNの間に並列に挿入されたコンデンサ11を有し、パルス状電圧信号である制御信号における低電圧期間に、このコンデンサ11が放電すること利用し、監視信号としての電流信号を送出するものとなっている。なお、コンデンサ11のデータ信号線DP側端子とデータ信号線DPとの間にはダイオード12が挿入されているため、制御信号における高電圧期間は、データ信号線DPからダイオード12を介してデータ信号線DN側へ充電電流が流れ、コンデンサ11が充電される。一方、制御信号における低電圧期間は、ダイオード12がオフしてデータ信号線DPからデータ信号線DNへ、コンデンサ11を充電するための電流は流れない(遮断される)。従って、低電圧期間に、コンデンサ11が放電して、制御信号の低電圧期間に電流信号を重畳することができる。つまり、同一伝送クロック期間で、親局60とターミナル86の双方向データ伝送が実現できる(全2重伝送)。
【0041】
図3に示すように、親局60から送出する制御データは、スタート信号STBとこれに続く1番目(#ad1)のターミナル86の制御”on”/”off”データ部、更にこれに続く2番目(#ad2)のターミナル86の制御”on”/”off”データ部、そして、以降同様に、n番目のターミナル86の制御”on”/”off”データ部まで続き、更にその後の、インデックスアドレスデータ部、およびエンド信号ENDで構成される。ターミナル86から親局60に向けて送出する監視”on”/”off”データ部は制御”on”/”off”データ部期間内に同時に行われる。また親局60と各ターミナル86との間での伝送は、システムの作動中に繰り返し行われる。
【0042】
図3において、上段の制御”on”/”off”データ部は親局60から送出される制御データであり、下段の監視”on”/”off”データ部はターミナル86から送出される監視データである。例えば、制御”on”/”off”データ部における制御データの最初のビットは蓋体4を開けることを指示するデータであり、蓋体4を開ける場合は”on”と、そうでなければ”off”とされる。一方、監視データの最初のビットは、レバースイッチ8の状態を示し、レバースイッチ8の状態により”on”または”off”とされる。
【0043】
インデックスアドレスデータ部の値(上段の制御データ)は、この物品受取管理システムの電源投入起動時において、スタート信号STBとこれに続く制御”on”/”off”データ部および監視”on”/”off”データ部、インデックスアドレスデータ部、エンド信号ENDで構成される伝送サイクル毎に、ターミナル86における最大アドレス値に達するまで1ずつ加算される。なお、図3において、インデックスアドレスデータ部は4bitとされているが、その幅に制限はなく、ターミナル86の数に応じて決めることができる。各ターミナル86では、自局に割り当てられた先頭アドレスが、インデックスアドレスデータ部のデータ値と一致する場合、そのターミナル86はENDデータに対して”on”の応答を返す。一致しない場合は”off”の応答を返す。END応答(END下段)が”on”であった場合は、親局60のEND応答データ抽出部78で抽出され、その先頭アドレスが、インデックスアドレス検出部62の内部に備えてある内部メモリの中にインデックスアドレスデータとして、記憶される。
【0044】
物品受取管理システムの起動時に、インデックスアドレス検出部62に記憶された各ターミナル86のインデックスアドレスデータは、起動時動作確認方法に用いられるものとなる。すなわち、ここでインデックスアドレスデータから把握される各先頭アドレスは、ターミナル86の各駆動装置にそれぞれ対応するものとなるから、このインデックスアドレスデータに対応するターミナル86に対し順次起動指示を付与するものとすれば、駆動装置が同時に起動することはなく、電圧降下を起こすことはない。以下、この物品受取管理システムにおける起動時動作確認方法について説明する。
【0045】
物品受取管理システムが起動されると、親局60はインデックスアドレス検出部62の内部に記憶されているインデックスアドレスデータ群の中から最初の所定インデックスアドレスデータの一つを選択し、図3に表記してあるインデックスアドレスデータとして伝送サイクル毎に、ターミナル86に伝送する。各ターミナル86では、自局の先頭アドレスがこのデータ値と一致する場合、ENDデータに対するEND応答データを返す。親局60から送出される制御”on”/”off”データ部の“TEST”データが”off“の場合、つまり通常動作時では、親局から送出するインデックスアドレスデータに対してターミナル86がEND応答データを”on“で返した場合は、ターミナル86が接続されていることとなる。END応答データが”off“である場合は、ターミナル86が接続されてないことになる。
【0046】
全扉の開閉動作が正常かどうかをチェックする場合は、制御装置80は動作確認データ85でその開放指示を行う。この時、親局60から送出する制御”on”/”off”データ部の“TEST”データ(図3において、制御”on”/”off”データ部の先頭から3番目)は”on“となる。各ターミナル86では、制御”on”/”off”データ部の“TEST”データが“on”の時は、自局の先頭アドレスがインデックスアドレスデータ部のデータ値と一致した場合、制御”on”/”off”データ部の“扉開”データが“on”の時は、電動モータ2を正転起動し、蓋体4を開放する。そして、その蓋体4を開放したターミナル86は、後述のエンド表示32を検出した時に、ENDデータに対するEND応答データ“on”を親局に送出する。END応答データ“on”を受け取った親局60は、制御”on”/”off”データ部の“扉開”データを“off”とする。
【0047】
インデックスアドレス検出部62は、予め設定された時間が経過した後、記憶されているインデックスアドレスデータのうち、次のデータ値を選択し、図3に表記してあるインデックスアドレスデータとして伝送サイクル毎に、ターミナル86に伝送する。次の対応するターミナル86では、制御”on”/”off”データ部の“TEST”データが“on”の時は、自局の先頭アドレスがこのデータ値と一致した場合、制御”on”/”off”データ部の“扉開”データが“on”の時は、電動モータ2を正転起動し、蓋体4を開放する。そして、その蓋体4を開放したターミナル86は、後述のエンド表示32を検出した時に、ENDデータに対するEND応答データ“on”を親局に送出し、電動モータ2を停止する。END応答データ“on”を受け取った親局60は、制御”on”/”off”データ部の“扉開”データを“off”とする。
【0048】
以降、インデックスアドレス検出部62に記憶されている全部のインデックスアドレスデータに対して、同様な動作を繰り返す。全部のターミナル86からのEND応答データ“on”をインデックスアドレス検出部62が確認すると、全部のターミナル86の扉体4が開放したと見なすことができる。END応答データ“on”がある一定時間内に完了とならない場合は、駆動系の異常を検知できる。
【0049】
全ての蓋体4が開放されたら、制御装置80は次の動作確認信号データ85で扉体4の閉鎖指示を行う。この時、親局60から送出する制御”on”/”off”データ部の“TEST”データ(図3において、制御”on”/”off”データ部の先頭から3番目)は”on“となる。各ターミナル86では、制御”on”/”off”データ部の“TEST”データが”on“の時は、自局の先頭アドレスがこのデータ値と一致した場合、制御”on”/”off”データ部の“扉閉”データが“on”の時は、電動モータ2を逆転起動し、蓋体4を閉鎖する。そして、蓋体4を閉鎖したターミナル86が後述のスタート表示31を検出した時に、ENDデータに対するEND応答データ“on”を親局に送出し、電動モータ2を停止する。END応答データ“on”を受け取った親局60は、制御”on”/”off”データ部の“扉閉”データを“off”とする。
【0050】
以降、インデックスアドレス検出部62に記憶されている全部のインデックスアドレスデータに対して、同様な動作を繰り返す。全部のターミナル86からのEND応答データ“on”をインデックスアドレス検出部62が確認すると、全部のターミナル86の扉体4が閉鎖したと見なすことができる。END応答データ“on”がある一定時間内に完了とならない場合は、駆動系の異常を検知できる。
【0051】
この動作確認方法では、複数の電動モータ2が同時に起動することはなく、電圧降下を起こすことはない。従って、順次起動する電動モータ2により収容空間に設けられた全ての蓋体4を、電圧降下を起こすことなく動作させることが可能となる。なお、インデックスアドレス検出部62からのインデックスアドレスデータが次のデータ値に切り替わる時間間隔は、100msec、500msecなど、状況に応じた設定とすることができる。
【0052】
インデックスアドレス検出部62からのインデックスアドレスデータが次のデータ値に切り替わる時間間隔は、先に駆動した電動モータ2の動作の完了を待って行ってもよい。
【0053】
電動モータ2の動作が終了したことを示す情報は、回転軸1に設けた標識3を利用して知ることができる。以下、その方法について説明する。
【0054】
図5に示すように、回転軸1には、その周方向表面に、間隔を開けて配置された複数のバーで構成される標識3が設けられている。また、回転軸1の軸線と直交し標識3と重なり合う位置には、非接触型センサとして3個の光センサ5a、5b、5cが回転軸1の長さ方向に等間隔で配置されている。これら光センサ5a、5b、5cは、発光ダイオード51とフォトトランジスタ52とから構成される公知のもので、標識3とそれ以外の部分との濃淡の差を利用して、標識3を読み取ることができる。
【0055】
標識3は複数のバーで構成され、周方向の両端に配置されたスタート表示31およびエンド表示32と、これらスタート表示31とエンド表示32との間に配置された複数の角度表示33とを有している。スタート表示31およびエンド表示32は、好ましい回転角度の上限値と下限値である。従って、これらの表示が所定の位置に達した場合、回転軸1の回転を停止させる必要がある。すなわち、これらの表示が所定の位置に達したときが電動モータ2の停止タイミングとなる。
【0056】
スタート表示31およびエンド表示32は、角度表示33よりも、その一端が回転軸1の長さ方向に突出している。ただし、突出する端部は、スタート表示31とエンド表示32とで異なっており、光センサ5を背にして見た場合、スタート表示31は右方向(蓋体4側)に、エンド表示32は左側(電動モータ2側)に突出している。そして、角度表示33が中央に配置された光センサ5bのみで読み取られるのに対し、スタート表示31は光センサ5bと蓋体4側に配置された光センサ5aの2個で読み取られ、エンド表示32は光センサ5bと電動モータ2側に配置された光センサ5cの2個で読み取られるものとなっている。そのため、3個の光センサ5a、5b、5cの読み取りパターンにより、回転限界であることおよびスタート表示31側かエンド表示32側かを検知できる。すなわち、スタート表示31およびエンド表示32が所定の位置に達したことを検知でき、電動モータ2の動作が終了したことを示す情報を得ることができる。
【0057】
なお、角度表示33は、所望の制御形態に応じてその数を適宜調整すればよく、例えば、制御範囲(スタート表示31とエンド表示32とで挟まれた範囲)が120度で、45度毎に精密な制御を行いたい場合、45度間隔で5個の角度表示33を配置すれば良い。この場合、例えば、スタート表示31から回転を開始し、角度表示33が2個通過するまでは回転速度を遅くし、次の2個が通過するまでは回転角度を速くし、エンド表示32までは再び回転速度を遅くし作業者の安全を図る等の制御が可能となる。
【0058】
図4に示すように、ターミナル86は、光センサ5a、5b、5c、マイクロコンピュータ・コントロール・ユニット(MCU)6を備える。そして、光センサ5a、5b、5cは、標識3を読み取ったとき、MCU6にパルス信号PDa、PDb、PDcを出力する。MCU6は、CPU、RAM、ROMを備え、演算機能を有しており、制御に必要な情報を得るための処理を行う。図5に示す標識3は相対コードであり、各表示31、32、33自体には位置情報が含まれていないことから、MCU6は光センサ5bからのパルス信号PDbをカウントし、光センサ5bが配置された計測位置に標識3が到達した回数(到達回数)を記憶する。なお、光センサ5aはスタート信号表示31のみを、光センサ5cはエンド信号表示32のみを読み取るため、光センサ5a、5cからのパルス信号PDa、PDcの有無は、回転限界の制御におけるスイッチ信号とされている。
【0059】
MCU6には、電動モータ2の制御処理を行う到達回数が予め記憶されており、回数値がその記憶された値に達するまでカウントを続ける。そして、到達回数が所定の値に達すると、記憶されている制御処理を行うために、電動モータ2へ駆動信号を出力する。例えば、図5に示す標識3の場合、スタート表示31が初期状態、すなわち角度が0度の状態で回転が開始された場合、標識3の到達回数が2回に達したとき電動モータ2へ回転速度を上げる駆動信号を出力し、到達回数が4回に達したとき回転速度を下げる駆動信号を出力し、到達回数が6回に達したとき電動モータ2の駆動信号を停止する。なお、MCU6から駆動信号が送られてから電動モータ2が停止するまでにタイムラグが生じる場合は、MCU6から駆動信号を出力するタイミングをずらしてもよい。例えば、到達回数が5回に達したときに、電動モータ2への駆動信号を停止しても良い。
【0060】
このように、標識3の計測位置への到達回数により電動モータ2の制御を行うことにより、回転軸1に接合され回転軸1に連動する前記蓋体4の動作を制御することができる。例えば、図5に示すように、回転開始時において回転軸1から垂下し保管棚を閉鎖する状態(図5の破線で示す状態)にある蓋体4を、標識3が計測位置に所定回数到達するまで回転軸1を回転させることで、上向きに傾斜し保管棚を開放する状態にすることができる。なお、保管棚を開放する状態から閉鎖する状態へ戻すときも同様である。
【符号の説明】
【0061】
1 回転軸
2 電動モータ
3 標識
4 蓋体
5a、5b、5c 光センサ
6 MCU
7 表示ランプ
8 レバースイッチ
11 コンデンサ
12 ダイオード
13 パイプラック
14 読み取り機構
15 駆動機構
31 スタート表示
32 エンド表示
33 角度表示
51 発光ダイオード
52 フォトトランジスタ
60 親局
61 出力データ部
62 インデックスアドレス検出部
63 タイミング発生部
64 親局出力部
65 親局入力部
66 入力データ部
67 伝送部リーダ電流回路
71 発信器
72 タイミング発生手段
73 制御データ発生手段
74 ラインドライバ
75、90 DC電源
76 監視信号検出手段
77 監視データ抽出手段
78 END応答データ抽出部
80 制御装置
81 出力ユニット
82 入力ユニット
83 制御信号データ
84 監視信号データ
85 起動動作確認データ
86 ターミナル
【特許請求の範囲】
【請求項1】
駆動装置を介して駆動信号により回転が制御される回転軸を備えた棚に設置され、前記駆動装置に制御信号を出力するターミナルを複数備えた物品受取管理システムにおいて、
前記複数のターミナルに送出される制御信号データ上の、前記複数のターミナルの各々に対応するデータ列のインデックスアドレスを、前記物品受取管理システムの起動時に把握し、前記インデックスアドレスに基づき前記ターミナルの各々について動作確認を行うことを特徴とする起動時動作確認方法。
【請求項2】
前記動作確認において、前記インデックスアドレスに基づいて順次起動指示を付与する請求項1に記載の起動時動作確認方法。
【請求項3】
前記起動指示は、所定の時間間隔を空けて付与される請求項2に記載の起動時動作確認方法。
【請求項4】
前記起動指示は、先に起動を始めた前記駆動装置の動作の完了を待って付与される請求項2に記載の起動時動作確認方法。
【請求項5】
前記起動指示から所定時間の経過後、起動時動作確認ができない前記ターミナルを駆動故障と判断する請求項2、3又は4の何れか一つの項に記載の起動時動作確認方法。
【請求項6】
前記動作確認において、前記制御信号データにおける前記駆動装置の駆動指示が無い場合に、前記インデックスアドレスデータに対する前記ターミナルからの応答の有無により、前記複数のターミナルの各々について接続の有無を判断する請求項1に記載の起動時動作確認方法。
【請求項1】
駆動装置を介して駆動信号により回転が制御される回転軸を備えた棚に設置され、前記駆動装置に制御信号を出力するターミナルを複数備えた物品受取管理システムにおいて、
前記複数のターミナルに送出される制御信号データ上の、前記複数のターミナルの各々に対応するデータ列のインデックスアドレスを、前記物品受取管理システムの起動時に把握し、前記インデックスアドレスに基づき前記ターミナルの各々について動作確認を行うことを特徴とする起動時動作確認方法。
【請求項2】
前記動作確認において、前記インデックスアドレスに基づいて順次起動指示を付与する請求項1に記載の起動時動作確認方法。
【請求項3】
前記起動指示は、所定の時間間隔を空けて付与される請求項2に記載の起動時動作確認方法。
【請求項4】
前記起動指示は、先に起動を始めた前記駆動装置の動作の完了を待って付与される請求項2に記載の起動時動作確認方法。
【請求項5】
前記起動指示から所定時間の経過後、起動時動作確認ができない前記ターミナルを駆動故障と判断する請求項2、3又は4の何れか一つの項に記載の起動時動作確認方法。
【請求項6】
前記動作確認において、前記制御信号データにおける前記駆動装置の駆動指示が無い場合に、前記インデックスアドレスデータに対する前記ターミナルからの応答の有無により、前記複数のターミナルの各々について接続の有無を判断する請求項1に記載の起動時動作確認方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−254399(P2010−254399A)
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願番号】特願2009−104228(P2009−104228)
【出願日】平成21年4月22日(2009.4.22)
【出願人】(501194514)株式会社 エニイワイヤ (37)
【Fターム(参考)】
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願日】平成21年4月22日(2009.4.22)
【出願人】(501194514)株式会社 エニイワイヤ (37)
【Fターム(参考)】
[ Back to top ]