
物品把持方法及び物品把持装置
【課題】ワークを多段に積み重ねたワーク積載部におけるワーク受けとその下部の緩衝材を取り除く作業をより効率的なものとする。
【解決手段】自動車用タイヤのホイール1をダネッジ15(トレイ)上に複数配置した状態で多段に積み重ねてワーク積載部7とする。ホイール1とその上段のダネッジ15との間には、柔軟変形物からなる緩衝材17を配置して、ホイール1の傷つき抑えている。ワーク積載部7から多関節ロボット9のハンド13によってホイール1を順次搬出する際に、ダネッジ15及び緩衝材17を取り除く必要がある。このとき、多関節ロボット9のハンド13に設けたダネッジ把持部37により、ダネッジ15及び緩衝材17を一緒に把持する。
【解決手段】自動車用タイヤのホイール1をダネッジ15(トレイ)上に複数配置した状態で多段に積み重ねてワーク積載部7とする。ホイール1とその上段のダネッジ15との間には、柔軟変形物からなる緩衝材17を配置して、ホイール1の傷つき抑えている。ワーク積載部7から多関節ロボット9のハンド13によってホイール1を順次搬出する際に、ダネッジ15及び緩衝材17を取り除く必要がある。このとき、多関節ロボット9のハンド13に設けたダネッジ把持部37により、ダネッジ15及び緩衝材17を一緒に把持する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ワーク受けに載せたワークを多段に積み重ねた状態で実施する物品把持方法及びこの物品把持方法で使用する物品把持装置に関する。
【背景技術】
【0002】
ワークとして例えば自動車用タイヤのホイールを搬送する形態として、該ホイールを、ワーク受けとなる仕切り板を介して多段に積み重ねた状態とする技術が知られている(下記特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−145446号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記したホイールをワーク受けを介して多段に積み重ねる際には、タイヤを車両に装着したときのホイールの外部に露出する表面側が上面となるようにしてワーク受け上に載せる。この場合、ホイールの外部に露出する表面側は、上段のワーク受けに接触して傷が付く恐れがあるため、下段のホイールと上段のワーク受けとの間に緩衝材を配置することがある。緩衝材は、例えば樹脂で構成するなどして柔軟で軽量な部材とすることが求められる。
【0005】
このような柔軟で軽量な緩衝材を使用して多段に積み重ねた状態のホイールを、例えば多関節ロボットのハンドで把持して順次搬出する際には、1段目のホイールを搬出した後に、ワーク受けとその下部の緩衝材を取り除く必要が生じる。
【0006】
このワーク受けとその下部の緩衝材を取り除く作業は、ワークの搬出作業とは別に行うことになるので、できるだけ効率よく短時間で行うことが要求される。
【0007】
そこで、本発明は、ワークを多段に積み重ねたワーク積載部におけるワーク受けとその下部の緩衝材を取り除く作業をより効率的なものとすることを目的としている。
【課題を解決するための手段】
【0008】
本発明は、ワークをワーク受けに載せた状態で多段に積み重ねる際に、ワーク受けとその下段に位置するワークとの間に柔軟変形物からなる緩衝材を配置し、このワークを多段に積み重ねたワーク積載部からワークを順次搬出するにあたり、ワーク受けとその下部に位置する緩衝材とを取り除く作業として、ワーク受けと緩衝材とを把持具によって一緒に把持することを特徴とする。
【発明の効果】
【0009】
本発明によれば、ワーク積載部におけるワーク受けとその下部の緩衝材を取り除く際に、これらワーク受けと緩衝材とを一緒に把持するようにしたので、柔軟変形物からなる緩衝材は、ワーク受けを介して把持されることになってより確実に把持することができ、ワーク受けとその下部の緩衝材を取り除く作業をより効率的なものとすることができる。
【図面の簡単な説明】
【0010】
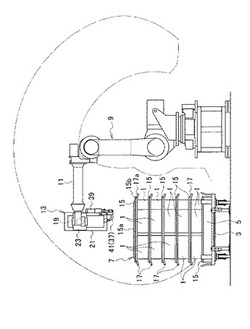
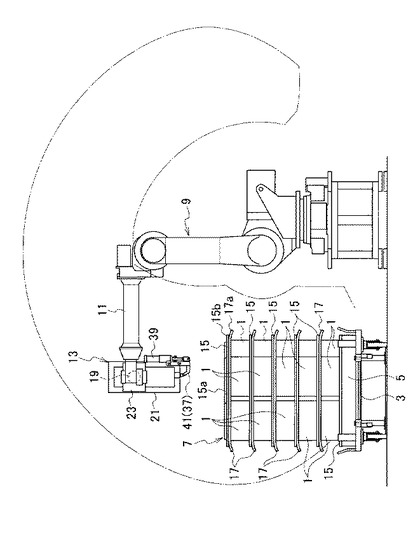
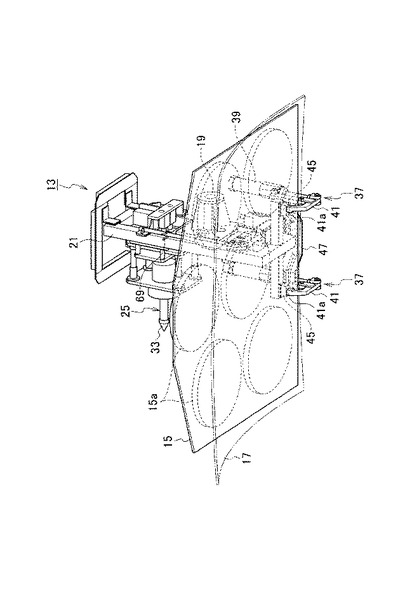
【図1】本発明の一実施形態に係わる物品把持装置を備える多関節ロボット及びワーク積載部を示す正面図である。
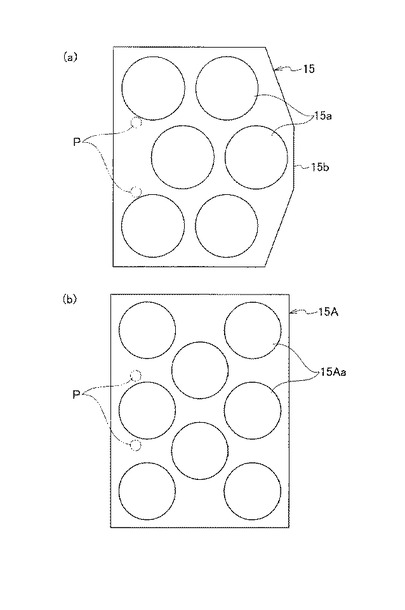
【図2】図1のワーク積載部における自動車用タイヤのホイールをダネッジ上に複数配置した例を示す平面図で、(a)はホイールが6個の例、(b)はホイールが8個の例である。
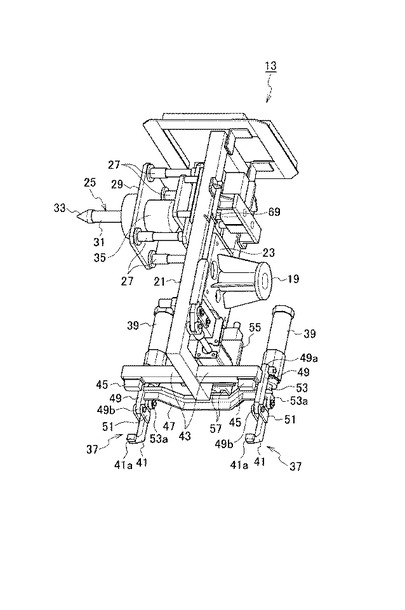
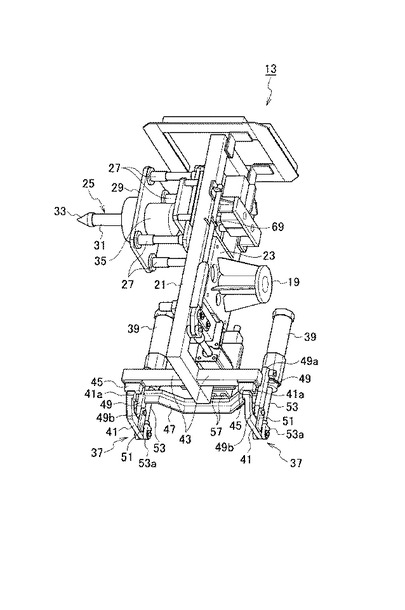
【図3】図1の多関節ロボットのダネッジ把持部を備えるハンドの斜視図で、ダネッジ把持部のアンクランプ時を示す。
【図4】図1の多関節ロボットのダネッジ把持部を備えるハンドの斜視図で、ダネッジ把持部のクランプ時を示す。
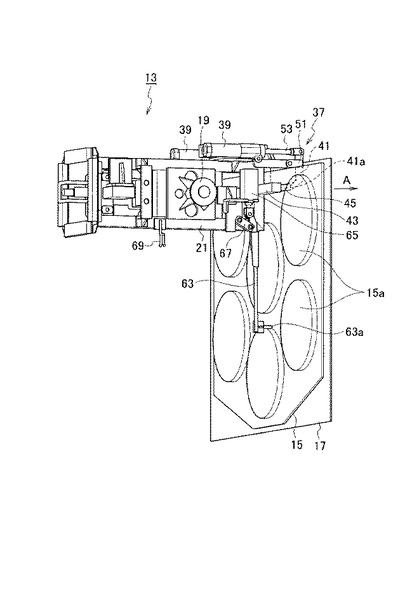
【図5】図3のダネッジ把持部により、ダネッジと緩衝材とを一緒に把持している状態を示す斜視図である。
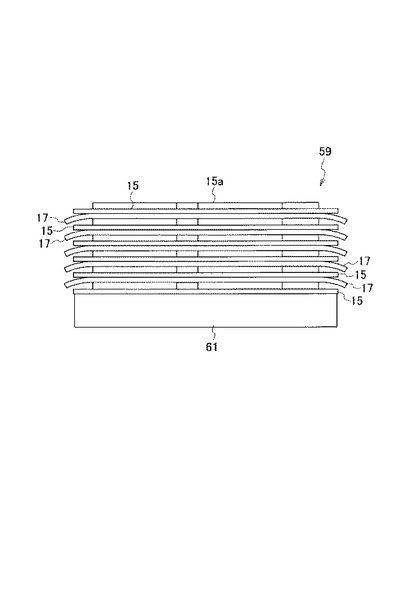
【図6】図5で把持したダネッジ及び緩衝材を仮置き台に積み重ねて処理した状態を示す正面図である。
【図7】図5で把持したダネッジ及び緩衝材を搬送するときの状態を示す斜視図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施の形態を図面に基づき説明する。
【0012】
図1に示すように、ワークとして例えば自動車用タイヤのホイール1は、台車3上に配置してあるパレット5上に多段に積み重ねてある。この多段に積み重ねたホイール1のワーク積載部7から、多関節ロボット9のアーム11の先端に設けてあるハンド13によって、ホイール1を順次把持して例えば図示しないコンベア上に搬出する。
【0013】
ワーク積載部7のホイール1は、図2(a)に平面図で示すダネッジ(トレイ)15上に複数載せてある。つまり、ワーク積載部7では、複数のホイール1とこの複数のホイール1を載せる1枚のダネッジ15とを1段として多段に積み重ねてある。ダネッジ15は、板状部材からなるワーク受けを構成しており、ホイール1を多段に積み重ねる際の仕切り板として機能する。
【0014】
図1、図2(a)のダネッジ15は平面視での形状を多角形として、6個のホイール1に対応して6箇所の凸部15aを上面に形成している。この凸部15aを、ホイール1をダネッジ15に載せたときにホイール1の裏面の内側に入り込ませることで、ホイール1のダネッジ15に対する位置決めを行って位置ずれを抑えるようにしている。
【0015】
図2(b)に示すダネッジ15Aは、平面視での形状を長方形状として8箇所に凸部15Aaを形成し、8個のホイール1を載せるようにしている。
【0016】
ホイール1は、ダネッジ15に載せた状態では、該ホイール1を備えるタイヤを車両に装着したときに外側に露出する表面側が上面となるようにしている。このようなホイール1をダネッジ15とともに図1のように多段に積み重ねる際には、その上段のダネッジ15との間には、柔軟変形物からなる緩衝材17を挟み込むようにして配置している。緩衝材17は、例えば高発泡ポリエチレンシートのような柔軟で軽量なシート状の樹脂で構成してあり、上段のダネッジ15による下段のホイール1の表面側の傷つきを抑えている。
【0017】
ダネッジ15は、図1に示すように、複数のホイール1を載せた状態で、外周縁15bがホイール1よりも外側に突出しており、この状態で緩衝材17の外周縁17aは、ダネッジ15の外周縁15bとほぼ重なる位置にあるか、あるいは僅かに外側に突出している。このとき、緩衝材17は柔軟性を備えていることからその外周縁17aは、図1に示すように下方に垂れ下がった状態となる。
【0018】
図1に示した多関節ロボット9のハンド13は、図3に示すアーム取付部19に多関節ロボット9のアーム11の先端が着脱可能に取り付けられ、アーム取付部19は、大略長方形の枠状に形成してあるフレーム21に取付板23を介して取り付けている。
【0019】
フレーム21のアーム取付部19と反対側のアーム取付部19からずれた位置には、ホイール1を把持するホイール把持部25を設けている。ホイール把持部25は、フレーム21から延びる4本の支柱27の先端に支持板29を備え、この支持板29にホイール1を把持するホイール把持ロッド31を取り付けている。ホイール把持ロッド31の先端には、拡開部33を設ける一方、支持板29のホイール把持ロッド31と反対側には、拡開部33を拡開させるシリンダなどからなるアクチュエータ35を設置している。
【0020】
そして、上記したホイール把持ロッド31をホイール1の中心に形成してある孔に挿入した状態で、アクチュエータ35を駆動して拡開部33を拡開させることで、ホイール1を把持することができる。
【0021】
また、フレーム21の図3中で下部に対応する先端側の側部には、図1に示したダネッジ15と緩衝材17とを一緒に把持する把持具としてのダネッジ把持部37を設けている。
【0022】
ダネッジ把持部37は、一対のシリンダ39の駆動によって同期して回転作動する一対の可動アーム41と、フレーム21の先端部両側から一対のシリンダ39の配列方向に延びる固定アーム43の先端の受け部45とを備えている。可動アーム41は可動部を構成し、受け部45は固定部を構成している。固定アーム43の先端に設けてある受け部45と可動アーム41の先端に設けてある押さえ部41aとの間で、ダネッジ15と緩衝材17とを一緒に把持する。
【0023】
上記した固定アーム43に対しほぼ平行な状態で屈曲形状で延びる取付アーム47の両端に、フレーム21の長手方向に延びる取付ブラケット49を連結し、この取付ブラケット49の基端部49aにシリンダ39を回動可能に取り付ける。一方、取付ブラケット49の先端部49bには、可動アーム41に固定してある取付片51の先端を回動可能に連結する。そして、可動アーム41の取付片51を境にして押さえ部41aと反対側の端部に、シリンダ39のピストンロッド53の先端部53aを回動可能に連結する。
【0024】
上記したシリンダ39や可動アーム41を両端に備える取付アーム47は、フレーム21に固定してある可動アーム位置調整シリンダ55の複数のピストンロッド57の先端に連結している。すなわち、可動アーム位置調整シリンダ55を駆動することで、取付アーム47の両端に設けてあるシリンダ39や可動アーム41が一体となってフレーム21の長手方向に移動し、把持状態での受け部45と可動アーム41先端の押さえ部41aとの間隔を調整できる。
【0025】
図3の状態から、シリンダ39を駆動してピストンロッド53を突出させることで、可動アーム41が取付ブラケット49と取付片51との連結部を中心として回動し、図4のように、可動アーム41の押さえ部41aが受け部45に接近する。このとき、押さえ部41aと受け部45との間で、被把持物となる物品、本実施形態ではダネッジ15と緩衝材17とを一緒に把持することになる。
【0026】
前記した図1は、最上段のダネッジ15上に載せてあった図示しない複数のホイール全部を搬出した状態、もしくは、最上段のホイール1の表面の傷つきを抑えるために、緩衝材17及びダネッジ15を最上段のホイール1上に被せた状態である。この状態から、図1での最上段にある複数のホイール1を搬出するために、最上部にあるダネッジ15及び緩衝材17を取り除く必要がある。
【0027】
このとき、前述したように、緩衝材17は柔軟性を備えていることからその外周縁17aは、図1に示すように下方に垂れ下がった状態となっている。この状態で、多関節ロボット9のハンド13に設けたダネッジ把持部37により、ダネッジ15とその下部にある緩衝材17とを一緒に把持する。この把持する際のダネッジ15及び緩衝材17に対する把持位置Pは、図2(a)に示すように、凸部15aの近傍とする。
【0028】
図2(a)での把持位置Pは、ダネッジ15の把持部側となる図中で左側の上下2箇所の角部に形成してある凸部15aの内側近傍としている。一方、図2(b)での把持位置Pは、ダネッジ15Aの把持部側となる図中で左側の中央に形成してある凸部15Aaの図中で上下両側近傍としている。
【0029】
このような把持位置Pは、ダネッジ15(15A)と一緒に把持する緩衝材17についてみれば、ダネッジ15(15A)とその下部のホイール1とに挟まれて固定された状態の部位近傍を把持することになる。すなわち、把持するダネッジ15(15A)の下段のワーク1の近傍を把持することになる。
【0030】
その際、多関節ロボット9のアーム11を適宜回転駆動してハンド13を最上部のダネッジ15及び緩衝材17に側方から接近させ、図5に示すように、ダネッジ15及び緩衝材17をダネッジ把持部37により一緒に把持する。把持する際には、図3のアンクランプ状態で、受け部45をダネッジ15の上面にほぼ接触する位置とした状態で、受け部45に対して可動アーム41を回転させて、該可動アーム41の押さえ部41aを緩衝材17の下面に接近させる。
【0031】
すなわち、可動アーム41は、垂れ下がった状態の緩衝材17の外周縁17aを巻き込むようにして把持動作を行う。
【0032】
図5の把持状態では、柔軟変形物である緩衝材17は、ダネッジ把持部37による把持している位置から離れた先端側は、下方に垂れ下がった状態となっている。
【0033】
なお、図5でのダネッジ把持部37による把持位置は、図1では左側の側部に対応している。
【0034】
そして、このようにして把持したダネッジ15及び緩衝材17は、図6に示すように、ワーク受け処理部59に配置してある仮置き台61に順次積み重ねていく。この際、図5の把持状態のように、ダネッジ15が上部に位置し、緩衝材17が下部に位置した状態のまま仮置き台61に積み重ねる。
【0035】
図5のように把持して図6の仮置き台61まで搬送移動させる際には、図7に示すように、ダネッジ把持部37による把持位置側を上方とした状態で、ダネッジ15及び緩衝材17を上下方向の縦置き状態とする。また、搬送移動方向は、緩衝材17がダネッジ15よりも移動方向前方となるような矢印Aで示す方向とする。これにより、搬送移動時には緩衝材17がダネッジ15に押し付けられる状態となって、緩衝材17の形状が安定するので、搬送移動作業が効率よく行える。
【0036】
なお、図7では、ダネッジ押さえアーム63の先端の押さえ部63aによって、ダネッジ15を押さえてその変形を抑えている。ダネッジ押さえアーム63は、フレーム21側に設けてあるシリンダ65の駆動によって、リンク67を介して図7のダネッジ押さえ状態と、図4の格納状態とに変位する。格納状態では、フレーム21に設けてある保持部69に保持される。
【0037】
以上説明したように本実施形態によれば、ホイール1を多段に積み重ねたワーク積載部7におけるダネッジ15とその下部の緩衝材17を取り除く際に、これらダネッジ15と緩衝材17とを一緒に把持するようにしている。このため、柔軟変形物からなる緩衝材17は、ダネッジ15を介して把持されることになってより確実に把持することができ、ダネッジ15とその下部の緩衝材17を取り除く作業をより効率的なものとすることができる。
【0038】
また、本実施形態によれば、ダネッジ15とその下部に位置する緩衝材17とをダネッジ把持部37によって一緒に把持する際に、ダネッジ把持部37の受け部45をダネッジ15の上面に位置させた状態で、受け部45に対して可動アーム41を回転させて、該可動アーム41を緩衝材17の下面に接近させるようにしている。このため、緩衝材17の外周縁17aが図1のように垂れ下がったり、はみ出した状態であっても、またずれや弛みがあっても、外周縁17aを巻き込むようにして把持動作を行うことで、緩衝材17を安定して把持することができる。
【0039】
また、本実施形態によれば、ダネッジ15とその下部に位置する緩衝材17とをダネッジ把持部37によって一緒に把持する際に、把持するダネッジ15の下段のホイール1の近傍を把持するようにしている。ホイール1の近傍の緩衝材17は、該ホイール1とその上段に位置するダネッジ15とで挟まれて固定された状態であるため、ダネッジ15から大きく離反せずより密着した状態であり、把持作業が容易となる。
【0040】
さらに、本実施形態によれば、一緒に把持したダネッジ15とその下部に位置する緩衝材17とを、ワーク受け処理部57にて順次積み重ねて処理するようにしている。ワーク受け処理部57にてダネッジ15とともに積み重ねた状態の緩衝材17は、ダネッジ15に押さえられることによって形状が安定する。このため、積み重ねた状態のダネッジ15及び緩衝材17を再度把持するときに、図1のワーク積載部7からこれらを取り除くときと同様に、安定した作業を行うことができる。
【0041】
なお、本実施形態では、ワークとして自動車用タイヤのホイール1を例にとって説明したが、他の部品であっても構わない。
【符号の説明】
【0042】
1 自動車用タイヤのホイール(ワーク)
7 ワーク積載部
15 ダネッジ(ワーク受け)
17 緩衝材
37 ダネッジ把持部(把持具)
41 可動アーム(把持具の可動部)
45 受け部(把持具の固定部)
57 ワーク受け処理部
【技術分野】
【0001】
本発明は、ワーク受けに載せたワークを多段に積み重ねた状態で実施する物品把持方法及びこの物品把持方法で使用する物品把持装置に関する。
【背景技術】
【0002】
ワークとして例えば自動車用タイヤのホイールを搬送する形態として、該ホイールを、ワーク受けとなる仕切り板を介して多段に積み重ねた状態とする技術が知られている(下記特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−145446号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記したホイールをワーク受けを介して多段に積み重ねる際には、タイヤを車両に装着したときのホイールの外部に露出する表面側が上面となるようにしてワーク受け上に載せる。この場合、ホイールの外部に露出する表面側は、上段のワーク受けに接触して傷が付く恐れがあるため、下段のホイールと上段のワーク受けとの間に緩衝材を配置することがある。緩衝材は、例えば樹脂で構成するなどして柔軟で軽量な部材とすることが求められる。
【0005】
このような柔軟で軽量な緩衝材を使用して多段に積み重ねた状態のホイールを、例えば多関節ロボットのハンドで把持して順次搬出する際には、1段目のホイールを搬出した後に、ワーク受けとその下部の緩衝材を取り除く必要が生じる。
【0006】
このワーク受けとその下部の緩衝材を取り除く作業は、ワークの搬出作業とは別に行うことになるので、できるだけ効率よく短時間で行うことが要求される。
【0007】
そこで、本発明は、ワークを多段に積み重ねたワーク積載部におけるワーク受けとその下部の緩衝材を取り除く作業をより効率的なものとすることを目的としている。
【課題を解決するための手段】
【0008】
本発明は、ワークをワーク受けに載せた状態で多段に積み重ねる際に、ワーク受けとその下段に位置するワークとの間に柔軟変形物からなる緩衝材を配置し、このワークを多段に積み重ねたワーク積載部からワークを順次搬出するにあたり、ワーク受けとその下部に位置する緩衝材とを取り除く作業として、ワーク受けと緩衝材とを把持具によって一緒に把持することを特徴とする。
【発明の効果】
【0009】
本発明によれば、ワーク積載部におけるワーク受けとその下部の緩衝材を取り除く際に、これらワーク受けと緩衝材とを一緒に把持するようにしたので、柔軟変形物からなる緩衝材は、ワーク受けを介して把持されることになってより確実に把持することができ、ワーク受けとその下部の緩衝材を取り除く作業をより効率的なものとすることができる。
【図面の簡単な説明】
【0010】
【図1】本発明の一実施形態に係わる物品把持装置を備える多関節ロボット及びワーク積載部を示す正面図である。
【図2】図1のワーク積載部における自動車用タイヤのホイールをダネッジ上に複数配置した例を示す平面図で、(a)はホイールが6個の例、(b)はホイールが8個の例である。
【図3】図1の多関節ロボットのダネッジ把持部を備えるハンドの斜視図で、ダネッジ把持部のアンクランプ時を示す。
【図4】図1の多関節ロボットのダネッジ把持部を備えるハンドの斜視図で、ダネッジ把持部のクランプ時を示す。
【図5】図3のダネッジ把持部により、ダネッジと緩衝材とを一緒に把持している状態を示す斜視図である。
【図6】図5で把持したダネッジ及び緩衝材を仮置き台に積み重ねて処理した状態を示す正面図である。
【図7】図5で把持したダネッジ及び緩衝材を搬送するときの状態を示す斜視図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施の形態を図面に基づき説明する。
【0012】
図1に示すように、ワークとして例えば自動車用タイヤのホイール1は、台車3上に配置してあるパレット5上に多段に積み重ねてある。この多段に積み重ねたホイール1のワーク積載部7から、多関節ロボット9のアーム11の先端に設けてあるハンド13によって、ホイール1を順次把持して例えば図示しないコンベア上に搬出する。
【0013】
ワーク積載部7のホイール1は、図2(a)に平面図で示すダネッジ(トレイ)15上に複数載せてある。つまり、ワーク積載部7では、複数のホイール1とこの複数のホイール1を載せる1枚のダネッジ15とを1段として多段に積み重ねてある。ダネッジ15は、板状部材からなるワーク受けを構成しており、ホイール1を多段に積み重ねる際の仕切り板として機能する。
【0014】
図1、図2(a)のダネッジ15は平面視での形状を多角形として、6個のホイール1に対応して6箇所の凸部15aを上面に形成している。この凸部15aを、ホイール1をダネッジ15に載せたときにホイール1の裏面の内側に入り込ませることで、ホイール1のダネッジ15に対する位置決めを行って位置ずれを抑えるようにしている。
【0015】
図2(b)に示すダネッジ15Aは、平面視での形状を長方形状として8箇所に凸部15Aaを形成し、8個のホイール1を載せるようにしている。
【0016】
ホイール1は、ダネッジ15に載せた状態では、該ホイール1を備えるタイヤを車両に装着したときに外側に露出する表面側が上面となるようにしている。このようなホイール1をダネッジ15とともに図1のように多段に積み重ねる際には、その上段のダネッジ15との間には、柔軟変形物からなる緩衝材17を挟み込むようにして配置している。緩衝材17は、例えば高発泡ポリエチレンシートのような柔軟で軽量なシート状の樹脂で構成してあり、上段のダネッジ15による下段のホイール1の表面側の傷つきを抑えている。
【0017】
ダネッジ15は、図1に示すように、複数のホイール1を載せた状態で、外周縁15bがホイール1よりも外側に突出しており、この状態で緩衝材17の外周縁17aは、ダネッジ15の外周縁15bとほぼ重なる位置にあるか、あるいは僅かに外側に突出している。このとき、緩衝材17は柔軟性を備えていることからその外周縁17aは、図1に示すように下方に垂れ下がった状態となる。
【0018】
図1に示した多関節ロボット9のハンド13は、図3に示すアーム取付部19に多関節ロボット9のアーム11の先端が着脱可能に取り付けられ、アーム取付部19は、大略長方形の枠状に形成してあるフレーム21に取付板23を介して取り付けている。
【0019】
フレーム21のアーム取付部19と反対側のアーム取付部19からずれた位置には、ホイール1を把持するホイール把持部25を設けている。ホイール把持部25は、フレーム21から延びる4本の支柱27の先端に支持板29を備え、この支持板29にホイール1を把持するホイール把持ロッド31を取り付けている。ホイール把持ロッド31の先端には、拡開部33を設ける一方、支持板29のホイール把持ロッド31と反対側には、拡開部33を拡開させるシリンダなどからなるアクチュエータ35を設置している。
【0020】
そして、上記したホイール把持ロッド31をホイール1の中心に形成してある孔に挿入した状態で、アクチュエータ35を駆動して拡開部33を拡開させることで、ホイール1を把持することができる。
【0021】
また、フレーム21の図3中で下部に対応する先端側の側部には、図1に示したダネッジ15と緩衝材17とを一緒に把持する把持具としてのダネッジ把持部37を設けている。
【0022】
ダネッジ把持部37は、一対のシリンダ39の駆動によって同期して回転作動する一対の可動アーム41と、フレーム21の先端部両側から一対のシリンダ39の配列方向に延びる固定アーム43の先端の受け部45とを備えている。可動アーム41は可動部を構成し、受け部45は固定部を構成している。固定アーム43の先端に設けてある受け部45と可動アーム41の先端に設けてある押さえ部41aとの間で、ダネッジ15と緩衝材17とを一緒に把持する。
【0023】
上記した固定アーム43に対しほぼ平行な状態で屈曲形状で延びる取付アーム47の両端に、フレーム21の長手方向に延びる取付ブラケット49を連結し、この取付ブラケット49の基端部49aにシリンダ39を回動可能に取り付ける。一方、取付ブラケット49の先端部49bには、可動アーム41に固定してある取付片51の先端を回動可能に連結する。そして、可動アーム41の取付片51を境にして押さえ部41aと反対側の端部に、シリンダ39のピストンロッド53の先端部53aを回動可能に連結する。
【0024】
上記したシリンダ39や可動アーム41を両端に備える取付アーム47は、フレーム21に固定してある可動アーム位置調整シリンダ55の複数のピストンロッド57の先端に連結している。すなわち、可動アーム位置調整シリンダ55を駆動することで、取付アーム47の両端に設けてあるシリンダ39や可動アーム41が一体となってフレーム21の長手方向に移動し、把持状態での受け部45と可動アーム41先端の押さえ部41aとの間隔を調整できる。
【0025】
図3の状態から、シリンダ39を駆動してピストンロッド53を突出させることで、可動アーム41が取付ブラケット49と取付片51との連結部を中心として回動し、図4のように、可動アーム41の押さえ部41aが受け部45に接近する。このとき、押さえ部41aと受け部45との間で、被把持物となる物品、本実施形態ではダネッジ15と緩衝材17とを一緒に把持することになる。
【0026】
前記した図1は、最上段のダネッジ15上に載せてあった図示しない複数のホイール全部を搬出した状態、もしくは、最上段のホイール1の表面の傷つきを抑えるために、緩衝材17及びダネッジ15を最上段のホイール1上に被せた状態である。この状態から、図1での最上段にある複数のホイール1を搬出するために、最上部にあるダネッジ15及び緩衝材17を取り除く必要がある。
【0027】
このとき、前述したように、緩衝材17は柔軟性を備えていることからその外周縁17aは、図1に示すように下方に垂れ下がった状態となっている。この状態で、多関節ロボット9のハンド13に設けたダネッジ把持部37により、ダネッジ15とその下部にある緩衝材17とを一緒に把持する。この把持する際のダネッジ15及び緩衝材17に対する把持位置Pは、図2(a)に示すように、凸部15aの近傍とする。
【0028】
図2(a)での把持位置Pは、ダネッジ15の把持部側となる図中で左側の上下2箇所の角部に形成してある凸部15aの内側近傍としている。一方、図2(b)での把持位置Pは、ダネッジ15Aの把持部側となる図中で左側の中央に形成してある凸部15Aaの図中で上下両側近傍としている。
【0029】
このような把持位置Pは、ダネッジ15(15A)と一緒に把持する緩衝材17についてみれば、ダネッジ15(15A)とその下部のホイール1とに挟まれて固定された状態の部位近傍を把持することになる。すなわち、把持するダネッジ15(15A)の下段のワーク1の近傍を把持することになる。
【0030】
その際、多関節ロボット9のアーム11を適宜回転駆動してハンド13を最上部のダネッジ15及び緩衝材17に側方から接近させ、図5に示すように、ダネッジ15及び緩衝材17をダネッジ把持部37により一緒に把持する。把持する際には、図3のアンクランプ状態で、受け部45をダネッジ15の上面にほぼ接触する位置とした状態で、受け部45に対して可動アーム41を回転させて、該可動アーム41の押さえ部41aを緩衝材17の下面に接近させる。
【0031】
すなわち、可動アーム41は、垂れ下がった状態の緩衝材17の外周縁17aを巻き込むようにして把持動作を行う。
【0032】
図5の把持状態では、柔軟変形物である緩衝材17は、ダネッジ把持部37による把持している位置から離れた先端側は、下方に垂れ下がった状態となっている。
【0033】
なお、図5でのダネッジ把持部37による把持位置は、図1では左側の側部に対応している。
【0034】
そして、このようにして把持したダネッジ15及び緩衝材17は、図6に示すように、ワーク受け処理部59に配置してある仮置き台61に順次積み重ねていく。この際、図5の把持状態のように、ダネッジ15が上部に位置し、緩衝材17が下部に位置した状態のまま仮置き台61に積み重ねる。
【0035】
図5のように把持して図6の仮置き台61まで搬送移動させる際には、図7に示すように、ダネッジ把持部37による把持位置側を上方とした状態で、ダネッジ15及び緩衝材17を上下方向の縦置き状態とする。また、搬送移動方向は、緩衝材17がダネッジ15よりも移動方向前方となるような矢印Aで示す方向とする。これにより、搬送移動時には緩衝材17がダネッジ15に押し付けられる状態となって、緩衝材17の形状が安定するので、搬送移動作業が効率よく行える。
【0036】
なお、図7では、ダネッジ押さえアーム63の先端の押さえ部63aによって、ダネッジ15を押さえてその変形を抑えている。ダネッジ押さえアーム63は、フレーム21側に設けてあるシリンダ65の駆動によって、リンク67を介して図7のダネッジ押さえ状態と、図4の格納状態とに変位する。格納状態では、フレーム21に設けてある保持部69に保持される。
【0037】
以上説明したように本実施形態によれば、ホイール1を多段に積み重ねたワーク積載部7におけるダネッジ15とその下部の緩衝材17を取り除く際に、これらダネッジ15と緩衝材17とを一緒に把持するようにしている。このため、柔軟変形物からなる緩衝材17は、ダネッジ15を介して把持されることになってより確実に把持することができ、ダネッジ15とその下部の緩衝材17を取り除く作業をより効率的なものとすることができる。
【0038】
また、本実施形態によれば、ダネッジ15とその下部に位置する緩衝材17とをダネッジ把持部37によって一緒に把持する際に、ダネッジ把持部37の受け部45をダネッジ15の上面に位置させた状態で、受け部45に対して可動アーム41を回転させて、該可動アーム41を緩衝材17の下面に接近させるようにしている。このため、緩衝材17の外周縁17aが図1のように垂れ下がったり、はみ出した状態であっても、またずれや弛みがあっても、外周縁17aを巻き込むようにして把持動作を行うことで、緩衝材17を安定して把持することができる。
【0039】
また、本実施形態によれば、ダネッジ15とその下部に位置する緩衝材17とをダネッジ把持部37によって一緒に把持する際に、把持するダネッジ15の下段のホイール1の近傍を把持するようにしている。ホイール1の近傍の緩衝材17は、該ホイール1とその上段に位置するダネッジ15とで挟まれて固定された状態であるため、ダネッジ15から大きく離反せずより密着した状態であり、把持作業が容易となる。
【0040】
さらに、本実施形態によれば、一緒に把持したダネッジ15とその下部に位置する緩衝材17とを、ワーク受け処理部57にて順次積み重ねて処理するようにしている。ワーク受け処理部57にてダネッジ15とともに積み重ねた状態の緩衝材17は、ダネッジ15に押さえられることによって形状が安定する。このため、積み重ねた状態のダネッジ15及び緩衝材17を再度把持するときに、図1のワーク積載部7からこれらを取り除くときと同様に、安定した作業を行うことができる。
【0041】
なお、本実施形態では、ワークとして自動車用タイヤのホイール1を例にとって説明したが、他の部品であっても構わない。
【符号の説明】
【0042】
1 自動車用タイヤのホイール(ワーク)
7 ワーク積載部
15 ダネッジ(ワーク受け)
17 緩衝材
37 ダネッジ把持部(把持具)
41 可動アーム(把持具の可動部)
45 受け部(把持具の固定部)
57 ワーク受け処理部
【特許請求の範囲】
【請求項1】
板状部材からなるワーク受けにワークを載せ、これらワーク受け及びワークを多段に積み重ねてワーク積載部を設け、このワーク積載部におけるワーク受けとその下段に位置するワークとの間に、柔軟変形物からなる緩衝材を配置し、前記ワーク積載部からワークを順次搬出するにあたり、前記ワーク受けとその下部に位置する前記緩衝材とを前記ワーク積載部から取り除く作業として、これらワーク受けとその下部に位置する緩衝材とを把持具によって一緒に把持することを特徴とする物品把持方法。
【請求項2】
前記ワーク受けとその下部に位置する緩衝材とを前記把持具によって一緒に把持する際に、前記把持具の固定部を前記ワーク受けの上面に位置させた状態で、前記固定部に対して可動部を回転させて、該可動部を前記緩衝材の下面に接近させることを特徴とする請求項1に記載の物品把持方法。
【請求項3】
前記ワーク受けとその下部に位置する緩衝材とを前記把持具によって一緒に把持する際に、前記把持するワーク受けの下段のワーク近傍を把持することを特徴とする請求項1または2に記載の物品把持方法。
【請求項4】
前記一緒に把持したワーク受けと緩衝材とを、ワーク受け処理部に搬送し、該ワーク受け処理部にて順次積み重ねて処理することを特徴とする請求項1ないし3のいずれか1項に記載の物品把持方法。
【請求項5】
前記緩衝材は、高発泡ポリエチレンシートであることを特徴とする請求項1ないし4のいずれか1項に記載の物品把持方法。
【請求項6】
前記ワークは、自動車用タイヤのホイールであることを特徴とする請求項1ないし4のいずれか1項に記載の物品把持方法。
【請求項7】
板状部材からなるワーク受けにワークを載せ、これらワーク受けとワークとを多段に積み重ねてワーク積載部を設け、このワーク積載部におけるワーク受けとその下段に位置するワークとの間に、柔軟変形物からなる緩衝材を配置し、前記ワーク積載部からワークを順次搬出するにあたり、前記ワーク受けとその下部に位置する前記緩衝材とを前記ワーク積載部から取り除く際に、これらワーク受けとその下部に位置する緩衝材とを一緒に把持する把持具を備えることを特徴とする物品把持装置。
【請求項1】
板状部材からなるワーク受けにワークを載せ、これらワーク受け及びワークを多段に積み重ねてワーク積載部を設け、このワーク積載部におけるワーク受けとその下段に位置するワークとの間に、柔軟変形物からなる緩衝材を配置し、前記ワーク積載部からワークを順次搬出するにあたり、前記ワーク受けとその下部に位置する前記緩衝材とを前記ワーク積載部から取り除く作業として、これらワーク受けとその下部に位置する緩衝材とを把持具によって一緒に把持することを特徴とする物品把持方法。
【請求項2】
前記ワーク受けとその下部に位置する緩衝材とを前記把持具によって一緒に把持する際に、前記把持具の固定部を前記ワーク受けの上面に位置させた状態で、前記固定部に対して可動部を回転させて、該可動部を前記緩衝材の下面に接近させることを特徴とする請求項1に記載の物品把持方法。
【請求項3】
前記ワーク受けとその下部に位置する緩衝材とを前記把持具によって一緒に把持する際に、前記把持するワーク受けの下段のワーク近傍を把持することを特徴とする請求項1または2に記載の物品把持方法。
【請求項4】
前記一緒に把持したワーク受けと緩衝材とを、ワーク受け処理部に搬送し、該ワーク受け処理部にて順次積み重ねて処理することを特徴とする請求項1ないし3のいずれか1項に記載の物品把持方法。
【請求項5】
前記緩衝材は、高発泡ポリエチレンシートであることを特徴とする請求項1ないし4のいずれか1項に記載の物品把持方法。
【請求項6】
前記ワークは、自動車用タイヤのホイールであることを特徴とする請求項1ないし4のいずれか1項に記載の物品把持方法。
【請求項7】
板状部材からなるワーク受けにワークを載せ、これらワーク受けとワークとを多段に積み重ねてワーク積載部を設け、このワーク積載部におけるワーク受けとその下段に位置するワークとの間に、柔軟変形物からなる緩衝材を配置し、前記ワーク積載部からワークを順次搬出するにあたり、前記ワーク受けとその下部に位置する前記緩衝材とを前記ワーク積載部から取り除く際に、これらワーク受けとその下部に位置する緩衝材とを一緒に把持する把持具を備えることを特徴とする物品把持装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−43729(P2013−43729A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−181372(P2011−181372)
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]