
物品投入設備およびその制御方法
【課題】搬送される集品容器へ投入装置によって物品の落下投入を行うときに、物品が集品容器からこぼれ落ちる可能性を低減させる。
【解決手段】物品13の出し入れが可能な上方開口部24を有する集品容器12を搬送経路に沿って搬送する搬送装置14と、搬送装置14の搬送経路に沿って配置され、集品容器12が搬送経路における物品13の投入位置に達したときに、上方から集品容器12の上方開口部24へと物品13の投入を行う投入装置15と、集品容器12から搬送経路にこぼれ落ちた物品13A、13Bを検出する検出手段22と、物品13が集品容器12から搬送経路にこぼれ落ちたときの状況を認識して、当該物品13の集品容器12からのこぼれ落ち傾向を判定する判定手段16,17とを備える。
【解決手段】物品13の出し入れが可能な上方開口部24を有する集品容器12を搬送経路に沿って搬送する搬送装置14と、搬送装置14の搬送経路に沿って配置され、集品容器12が搬送経路における物品13の投入位置に達したときに、上方から集品容器12の上方開口部24へと物品13の投入を行う投入装置15と、集品容器12から搬送経路にこぼれ落ちた物品13A、13Bを検出する検出手段22と、物品13が集品容器12から搬送経路にこぼれ落ちたときの状況を認識して、当該物品13の集品容器12からのこぼれ落ち傾向を判定する判定手段16,17とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送される集品容器へ投入装置によって物品の落下投入を行う物品投入設備およびその制御方法に関する。
【背景技術】
【0002】
従来の物品投入設備が特許文献1に開示されている。
この特許文献1に記載された物品投入設備は、上方開口部を通して内部に物品が投入される集品容器を搬送装置により水平方向に搬送し、搬送装置による集品容器の搬送経路に沿って配置された投入装置によって、搬送される集品容器に物品を上方から落下投入させる設備である。搬送装置は、通常、一定速度で集品容器を搬送している。投入装置は、このように搬送されている途中の集品容器に対して物品を落下投入させるものである。通常は、搬送経路に沿って複数の投入装置が設置され、それによって集品容器には多種類の複数の物品が投入される。
【0003】
このような物品投入設備では、集品容器の搬送速度に比べて、投入装置による集品容器への投入動作の方が高速で行われるように構成されている。したがって、集品容器を静止あるいはほぼ静止させるために搬送装置を停止あるいは減速させることを必要とせずに、所定の搬送速度を維持したまま、投入装置により集品容器へ物品を落下投入させることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−222328号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、たとえば、ある投入装置によって集品容器に物品を落下投入させる場合に、それよりも搬送方向に沿った上流側ですでにその集品容器に投入されていた他の物品が、その集品容器の中にきわめて乱雑に投入されていたときには、これから投入しようとする物品が集品容器の中に入りきれずに、容器外にこぼれ落ちる可能性がある。またその他の何らかの原因、たとえば各種の投入条件によって、物品が集品容器からこぼれ落ちる可能性は皆無ではない。
【0006】
そこで本発明は、搬送される集品容器へ投入装置によって物品の落下投入を行うときに、物品が集品容器からこぼれ落ちる可能性を低減させることを目的とする。
【課題を解決するための手段】
【0007】
この目的を達成するため、本発明の物品投入設備は、物品の出し入れが可能な上方開口部を有する集品容器を搬送経路に沿って搬送する搬送装置と、搬送装置の搬送経路に沿って配置され、集品容器が搬送経路における物品の投入位置に達したときに、上方から集品容器の上方開口部へと物品の投入を行う投入装置と、集品容器から搬送経路にこぼれ落ちた物品を検出する検出手段と、物品が集品容器から搬送経路にこぼれ落ちたときの状況を認識して、当該物品の集品容器からのこぼれ落ち傾向を判定する判定手段とを備えたものである。したがって本発明によれば、どのような物品をどのような状況で集品容器に投入したときに、こぼれ落ちが生じやすいかの傾向をつかむことができる。
【0008】
本発明の物品投入設備の制御方法は、物品の出し入れが可能な上方開口部を有する集品容器を搬送経路に沿って搬送する搬送装置と、搬送装置の搬送経路に沿って配置され、集品容器が搬送経路における物品の投入位置に達したときに、上方から集品容器の上方開口部へと物品の投入を行う投入装置とを備えた物品投入設備の運転状態を制御するに際し、集品容器から搬送経路にこぼれ落ちた物品を検出し、物品が集品容器から搬送経路にこぼれ落ちたときの状況を認識して、当該物品の集品容器からのこぼれ落ち傾向を判定するものである。このようにすると、どのような物品をどのような状況で集品容器に投入したときに、こぼれ落ちが生じやすいかの傾向をつかむことができる。
【発明の効果】
【0009】
本発明によると、集品容器からの物品のこぼれ落ち傾向を判定するものであるため、その判定結果から、こぼれ落ちを防止するための対策を容易に講じることができる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施の形態の物品投入設備の平面図である。
【図2】図1における要部の正面図である。
【図3】図2における検出センサの位置を集品容器が通過するときの様子を表した図である。
【図4】図2における検出センサの位置を、集品容器からこぼれ落ちた物品が通過するときの様子を表した図である。
【図5】同物品投入設備の制御システムのブロック図である。
【図6】同物品投入設備の制御フロー図である。
【発明を実施するための形態】
【0011】
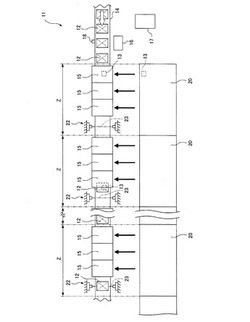
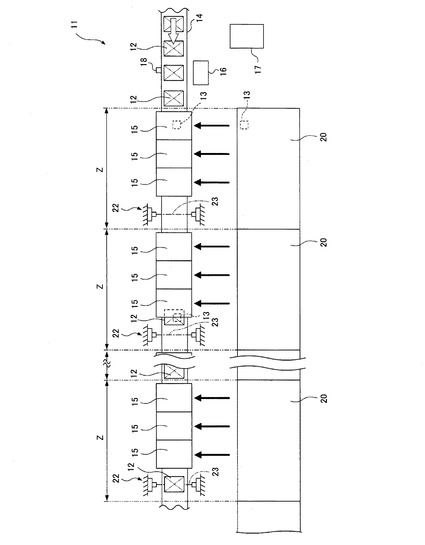
図1は、集品容器12に物品13を投入するための物品投入設備11の全体構成を示す平面図である。
この物品投入設備11は、ベルトコンベヤ装置等にて構成される搬送装置14により搬送経路に沿って複数の集品容器12を順次搬送し、搬送経路に沿って複数配置された投入装置15により、物品12の出し入れが可能な上方開口部を有する集品容器12に物品13を上方から落下投入させることで、集品容器12に対する物品13の集品を行う設備である。
【0012】
搬送装置14は、一定速度で集品容器12を搬送する。各集品容器12には、集品容器12毎に異なる独立した識別情報を有する、例えば、識別ラベルが付与されている。これに対応して、搬送方向に沿った投入装置15よりも上流側の位置には、集品容器12の識別情報を読み取るための読取装置18が配置されている。
【0013】
搬送方向に沿った読取装置18より下流側の位置には、作業者(図示せず)が作業を担当する作業領域(ゾーンともいう)Zが、搬送装置14の搬送方向に沿って複数配置されている。各作業領域Zには、種類毎の物品13を保管する物品保管手段20が備えられている。投入装置15は、各作業領域Zごとに複数が設けられて、作業者により物品保管手段20から取り出された物品13を受け入れて、前述のように搬送装置14によって搬送される集品容器12に落下投入させる。
【0014】
各作業領域Zの作業者は、自分の担当する作業領域Zの物品保管手段20から物品13を取り出して、投入装置15の内部に載置する。投入装置15は、対象の集品容器12が搬送されてくると、所定のタイミングにより、内部に載置された物品13を集品容器12の上方開口部に落下させて投入する。
【0015】
投入装置15には、種々の形式のものがある。たとえば、物品を支持したベルトを走行させて、そのベルトの終端部から物品を集品容器に向けて落下投入させる形式のものが知られている。あるいは、物品を支持した観音開き式の扉にて構成され、扉を開くことで物品を集品容器に向けて落下投入させる形式のものや、その他の構成のものも知られている。本発明においては、いずれの形式の投入装置を用いることも可能である。
【0016】
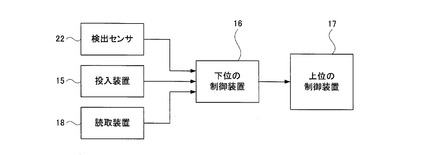
搬送装置14の近傍には、下位の制御装置16が設置されている。この下位の制御装置16は、搬送装置14の運転状況を監視・制御したり、後述の検出センサからの信号を入力して処理したりするなどの具体的な動作を行う。物品投入設備11には、下位の制御装置16とは別に、上位の制御装置17が設置されている。この上位の制御装置17は、物品投入設備11のシステム全体についての制御をつかさどるものである。図1では単一の搬送装置14を備えた物品投入設備11が例示されているが、たとえば搬送装置14を複数設置して、複数の物品投入ラインを構成した場合には、各ラインごとに下位の制御装置16が設けられ、それら複数の下位の制御装置16、16、・・・の全体をコントロールするために上位の制御装置17が設けられる。
【0017】
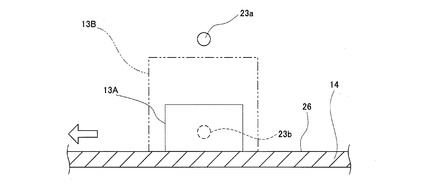
各作業領域Zにおける複数の投入装置15よりも搬送方向に沿った下流側の位置には、検出センサ22が設けられている。この検出センサ22は、たとえば光センサによって構成することができ、その場合は、搬送装置14をこの搬送装置14の幅方向に挟んだ位置に投光部と受光部とが設けられる。23はその光路であり、この光路23は水平方向となるように設定されている。
【0018】
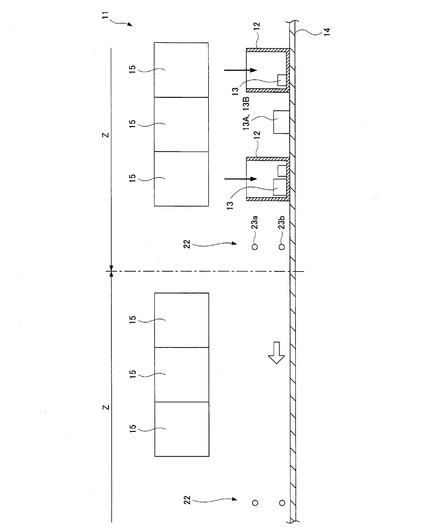
図2〜図4に示すように、検出センサ22は、詳細には上側光路23aと下側光路23bとを備えている。図5に示すように、検出センサ22の出力、すなわち上側光路23aを有するセンサの出力と、下側光路23bを有するセンサの出力とは、いずれも下位の制御装置16に入力されるように構成されている。
【0019】
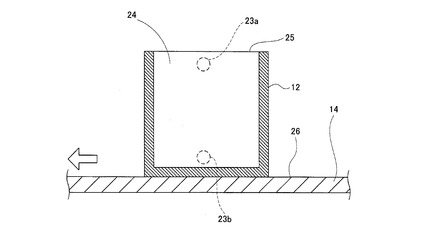
これら上側光路23aおよび下側光路23bは、図3に示すように搬送装置14にて搬送されている集品容器12が検出センサ22の位置を通過するときに、いずれもこの集品容器12によって遮られるように設定されている。詳細には、上側光路23aは、所定の大きさの集品容器12の上方開口部24の上縁25よりもすぐ下の部分に対応した高さに設定されている。
【0020】
図2、図4において、13Aは、集品容器12からこぼれ落ちた物品を示す。この物品13Aは、搬送装置14により受け止められて、集品容器12と同様に搬送される。図4に示すように、下側光路23bは、集品容器12に投入されるべき物品13のうちの最小サイズのものによって、すなわち集品容器12からこぼれ落ちた最小サイズの物品13Aによって遮られることが可能な高さに設定されている。換言すれば、搬送装置14の搬送面26に近接した低い位置に設定されている。
【0021】
光路23a、23bをこのように設定することで、集品容器12に投入される物品13は必ずこの集品容器よりも小さいので、集品容器12からこぼれ落ちた物品13Aは、下側光路23bは遮るが、上側光路23aを遮ることは無い。つまり、上側光路は、集品容器12に投入されるべき物品13のうちの最小サイズのものによって、すなわち集品容器12からこぼれ落ちた最大サイズの物品13Bによっても遮られることが無い位置に設定されている。
【0022】
その結果、下位の制御装置16は、上側光路23aと下側光路23bとの双方が遮られた旨の入力があった場合には、集品容器12が検出センサ22の位置を通過中であると判断し、下側光路23bが遮られかつ上側光路23aは遮られない場合は、集品容器12からこぼれ落ちた物品13A、13Bが検出センサ22の位置を通過中であると判断する。
【0023】
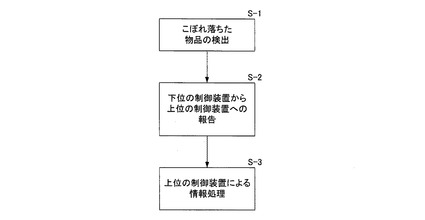
図5に示すように、下位の制御装置16は、検出センサ22の出力に加えて、投入装置15からの各種情報や、読取装置18の出力をも入力するように構成されている。そして下位の制御装置16は、図6のステップS−1において、集品容器12からこぼれ落ちた物品13A、13Bが存在すると判断した場合には、図6のステップS−2において、下記の点を上位の制御装置17に報告する。
1.物品13A、13Bがこぼれ落ちたという異常状態が発生したこと
2.異常が発生した作業領域Zの番号などの、その作業領域Zを特定するための情報
3.こぼれ落ちた物品13A、13Bの前後に存在する集品容器12、12の番号などの、その集品容器12、12を特定するための情報
【0024】
報告を受けた上位の制御装置17は、図6のステップS−3において、所要の情報処理を行う。すなわち、物品13A、13Bのこぼれ落ちという異常状態が発生した作業領域Zにおいて、そのこぼれ落ちた物品13A、13Bの前後に存在する集品容器12、12について、どの物品13がどの投入装置15においていくつ投入されたかを認識する。また上位の制御装置17は、各作業領域Zに存在するそれぞれの投入装置15、15、・・・について、投入動作を完了させたことの記録を認識することができる。この認識結果にもとづき、作業者の確認作業によって、こぼれ落ちが発生した集品容器12を特定するとともに、こぼれ落ちが発生したときの集品容器12への物品13の投入状況、すなわちその集品容器12においてこぼれ落ちが発生する直前に物品13が占めていた体積、を認識することができる。さらに制御装置17、16は、作業者に対して、どの投入装置15にどの物品13を供給すべきかを指示しているため、投入動作の完了の認識を行うことで、こぼれ落ちた物品13A、13Bがその作業領域Zにおけるどの投入装置15から投入されたものであるのかを判定することができる。
【0025】
これらの認識データを収集することで、どのような物品13をどのような状況で集品容器12に投入したときに、こぼれ落ちが生じやすいかの傾向をつかむことができる。それに応じて、たとえばこぼれ落ちやすい物品13については1つの集品容器12へ投入する個数を減らすなどして、こぼれ落ち防止対策を講じることができる。
【符号の説明】
【0026】
12 集品容器
13 物品
13A こぼれ落ちた物品
13B こぼれ落ちた物品
14 搬送経路
15 投入装置
16 下位の制御装置
17 上位の制御装置
22 検出センサ
24 上方開口部
【技術分野】
【0001】
本発明は、搬送される集品容器へ投入装置によって物品の落下投入を行う物品投入設備およびその制御方法に関する。
【背景技術】
【0002】
従来の物品投入設備が特許文献1に開示されている。
この特許文献1に記載された物品投入設備は、上方開口部を通して内部に物品が投入される集品容器を搬送装置により水平方向に搬送し、搬送装置による集品容器の搬送経路に沿って配置された投入装置によって、搬送される集品容器に物品を上方から落下投入させる設備である。搬送装置は、通常、一定速度で集品容器を搬送している。投入装置は、このように搬送されている途中の集品容器に対して物品を落下投入させるものである。通常は、搬送経路に沿って複数の投入装置が設置され、それによって集品容器には多種類の複数の物品が投入される。
【0003】
このような物品投入設備では、集品容器の搬送速度に比べて、投入装置による集品容器への投入動作の方が高速で行われるように構成されている。したがって、集品容器を静止あるいはほぼ静止させるために搬送装置を停止あるいは減速させることを必要とせずに、所定の搬送速度を維持したまま、投入装置により集品容器へ物品を落下投入させることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−222328号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、たとえば、ある投入装置によって集品容器に物品を落下投入させる場合に、それよりも搬送方向に沿った上流側ですでにその集品容器に投入されていた他の物品が、その集品容器の中にきわめて乱雑に投入されていたときには、これから投入しようとする物品が集品容器の中に入りきれずに、容器外にこぼれ落ちる可能性がある。またその他の何らかの原因、たとえば各種の投入条件によって、物品が集品容器からこぼれ落ちる可能性は皆無ではない。
【0006】
そこで本発明は、搬送される集品容器へ投入装置によって物品の落下投入を行うときに、物品が集品容器からこぼれ落ちる可能性を低減させることを目的とする。
【課題を解決するための手段】
【0007】
この目的を達成するため、本発明の物品投入設備は、物品の出し入れが可能な上方開口部を有する集品容器を搬送経路に沿って搬送する搬送装置と、搬送装置の搬送経路に沿って配置され、集品容器が搬送経路における物品の投入位置に達したときに、上方から集品容器の上方開口部へと物品の投入を行う投入装置と、集品容器から搬送経路にこぼれ落ちた物品を検出する検出手段と、物品が集品容器から搬送経路にこぼれ落ちたときの状況を認識して、当該物品の集品容器からのこぼれ落ち傾向を判定する判定手段とを備えたものである。したがって本発明によれば、どのような物品をどのような状況で集品容器に投入したときに、こぼれ落ちが生じやすいかの傾向をつかむことができる。
【0008】
本発明の物品投入設備の制御方法は、物品の出し入れが可能な上方開口部を有する集品容器を搬送経路に沿って搬送する搬送装置と、搬送装置の搬送経路に沿って配置され、集品容器が搬送経路における物品の投入位置に達したときに、上方から集品容器の上方開口部へと物品の投入を行う投入装置とを備えた物品投入設備の運転状態を制御するに際し、集品容器から搬送経路にこぼれ落ちた物品を検出し、物品が集品容器から搬送経路にこぼれ落ちたときの状況を認識して、当該物品の集品容器からのこぼれ落ち傾向を判定するものである。このようにすると、どのような物品をどのような状況で集品容器に投入したときに、こぼれ落ちが生じやすいかの傾向をつかむことができる。
【発明の効果】
【0009】
本発明によると、集品容器からの物品のこぼれ落ち傾向を判定するものであるため、その判定結果から、こぼれ落ちを防止するための対策を容易に講じることができる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施の形態の物品投入設備の平面図である。
【図2】図1における要部の正面図である。
【図3】図2における検出センサの位置を集品容器が通過するときの様子を表した図である。
【図4】図2における検出センサの位置を、集品容器からこぼれ落ちた物品が通過するときの様子を表した図である。
【図5】同物品投入設備の制御システムのブロック図である。
【図6】同物品投入設備の制御フロー図である。
【発明を実施するための形態】
【0011】
図1は、集品容器12に物品13を投入するための物品投入設備11の全体構成を示す平面図である。
この物品投入設備11は、ベルトコンベヤ装置等にて構成される搬送装置14により搬送経路に沿って複数の集品容器12を順次搬送し、搬送経路に沿って複数配置された投入装置15により、物品12の出し入れが可能な上方開口部を有する集品容器12に物品13を上方から落下投入させることで、集品容器12に対する物品13の集品を行う設備である。
【0012】
搬送装置14は、一定速度で集品容器12を搬送する。各集品容器12には、集品容器12毎に異なる独立した識別情報を有する、例えば、識別ラベルが付与されている。これに対応して、搬送方向に沿った投入装置15よりも上流側の位置には、集品容器12の識別情報を読み取るための読取装置18が配置されている。
【0013】
搬送方向に沿った読取装置18より下流側の位置には、作業者(図示せず)が作業を担当する作業領域(ゾーンともいう)Zが、搬送装置14の搬送方向に沿って複数配置されている。各作業領域Zには、種類毎の物品13を保管する物品保管手段20が備えられている。投入装置15は、各作業領域Zごとに複数が設けられて、作業者により物品保管手段20から取り出された物品13を受け入れて、前述のように搬送装置14によって搬送される集品容器12に落下投入させる。
【0014】
各作業領域Zの作業者は、自分の担当する作業領域Zの物品保管手段20から物品13を取り出して、投入装置15の内部に載置する。投入装置15は、対象の集品容器12が搬送されてくると、所定のタイミングにより、内部に載置された物品13を集品容器12の上方開口部に落下させて投入する。
【0015】
投入装置15には、種々の形式のものがある。たとえば、物品を支持したベルトを走行させて、そのベルトの終端部から物品を集品容器に向けて落下投入させる形式のものが知られている。あるいは、物品を支持した観音開き式の扉にて構成され、扉を開くことで物品を集品容器に向けて落下投入させる形式のものや、その他の構成のものも知られている。本発明においては、いずれの形式の投入装置を用いることも可能である。
【0016】
搬送装置14の近傍には、下位の制御装置16が設置されている。この下位の制御装置16は、搬送装置14の運転状況を監視・制御したり、後述の検出センサからの信号を入力して処理したりするなどの具体的な動作を行う。物品投入設備11には、下位の制御装置16とは別に、上位の制御装置17が設置されている。この上位の制御装置17は、物品投入設備11のシステム全体についての制御をつかさどるものである。図1では単一の搬送装置14を備えた物品投入設備11が例示されているが、たとえば搬送装置14を複数設置して、複数の物品投入ラインを構成した場合には、各ラインごとに下位の制御装置16が設けられ、それら複数の下位の制御装置16、16、・・・の全体をコントロールするために上位の制御装置17が設けられる。
【0017】
各作業領域Zにおける複数の投入装置15よりも搬送方向に沿った下流側の位置には、検出センサ22が設けられている。この検出センサ22は、たとえば光センサによって構成することができ、その場合は、搬送装置14をこの搬送装置14の幅方向に挟んだ位置に投光部と受光部とが設けられる。23はその光路であり、この光路23は水平方向となるように設定されている。
【0018】
図2〜図4に示すように、検出センサ22は、詳細には上側光路23aと下側光路23bとを備えている。図5に示すように、検出センサ22の出力、すなわち上側光路23aを有するセンサの出力と、下側光路23bを有するセンサの出力とは、いずれも下位の制御装置16に入力されるように構成されている。
【0019】
これら上側光路23aおよび下側光路23bは、図3に示すように搬送装置14にて搬送されている集品容器12が検出センサ22の位置を通過するときに、いずれもこの集品容器12によって遮られるように設定されている。詳細には、上側光路23aは、所定の大きさの集品容器12の上方開口部24の上縁25よりもすぐ下の部分に対応した高さに設定されている。
【0020】
図2、図4において、13Aは、集品容器12からこぼれ落ちた物品を示す。この物品13Aは、搬送装置14により受け止められて、集品容器12と同様に搬送される。図4に示すように、下側光路23bは、集品容器12に投入されるべき物品13のうちの最小サイズのものによって、すなわち集品容器12からこぼれ落ちた最小サイズの物品13Aによって遮られることが可能な高さに設定されている。換言すれば、搬送装置14の搬送面26に近接した低い位置に設定されている。
【0021】
光路23a、23bをこのように設定することで、集品容器12に投入される物品13は必ずこの集品容器よりも小さいので、集品容器12からこぼれ落ちた物品13Aは、下側光路23bは遮るが、上側光路23aを遮ることは無い。つまり、上側光路は、集品容器12に投入されるべき物品13のうちの最小サイズのものによって、すなわち集品容器12からこぼれ落ちた最大サイズの物品13Bによっても遮られることが無い位置に設定されている。
【0022】
その結果、下位の制御装置16は、上側光路23aと下側光路23bとの双方が遮られた旨の入力があった場合には、集品容器12が検出センサ22の位置を通過中であると判断し、下側光路23bが遮られかつ上側光路23aは遮られない場合は、集品容器12からこぼれ落ちた物品13A、13Bが検出センサ22の位置を通過中であると判断する。
【0023】
図5に示すように、下位の制御装置16は、検出センサ22の出力に加えて、投入装置15からの各種情報や、読取装置18の出力をも入力するように構成されている。そして下位の制御装置16は、図6のステップS−1において、集品容器12からこぼれ落ちた物品13A、13Bが存在すると判断した場合には、図6のステップS−2において、下記の点を上位の制御装置17に報告する。
1.物品13A、13Bがこぼれ落ちたという異常状態が発生したこと
2.異常が発生した作業領域Zの番号などの、その作業領域Zを特定するための情報
3.こぼれ落ちた物品13A、13Bの前後に存在する集品容器12、12の番号などの、その集品容器12、12を特定するための情報
【0024】
報告を受けた上位の制御装置17は、図6のステップS−3において、所要の情報処理を行う。すなわち、物品13A、13Bのこぼれ落ちという異常状態が発生した作業領域Zにおいて、そのこぼれ落ちた物品13A、13Bの前後に存在する集品容器12、12について、どの物品13がどの投入装置15においていくつ投入されたかを認識する。また上位の制御装置17は、各作業領域Zに存在するそれぞれの投入装置15、15、・・・について、投入動作を完了させたことの記録を認識することができる。この認識結果にもとづき、作業者の確認作業によって、こぼれ落ちが発生した集品容器12を特定するとともに、こぼれ落ちが発生したときの集品容器12への物品13の投入状況、すなわちその集品容器12においてこぼれ落ちが発生する直前に物品13が占めていた体積、を認識することができる。さらに制御装置17、16は、作業者に対して、どの投入装置15にどの物品13を供給すべきかを指示しているため、投入動作の完了の認識を行うことで、こぼれ落ちた物品13A、13Bがその作業領域Zにおけるどの投入装置15から投入されたものであるのかを判定することができる。
【0025】
これらの認識データを収集することで、どのような物品13をどのような状況で集品容器12に投入したときに、こぼれ落ちが生じやすいかの傾向をつかむことができる。それに応じて、たとえばこぼれ落ちやすい物品13については1つの集品容器12へ投入する個数を減らすなどして、こぼれ落ち防止対策を講じることができる。
【符号の説明】
【0026】
12 集品容器
13 物品
13A こぼれ落ちた物品
13B こぼれ落ちた物品
14 搬送経路
15 投入装置
16 下位の制御装置
17 上位の制御装置
22 検出センサ
24 上方開口部
【特許請求の範囲】
【請求項1】
物品の出し入れが可能な上方開口部を有する集品容器を搬送経路に沿って搬送する搬送装置と、
搬送装置の搬送経路に沿って配置され、集品容器が搬送経路における物品の投入位置に達したときに、上方から集品容器の上方開口部へと物品の投入を行う投入装置と、
集品容器から搬送経路にこぼれ落ちた物品を検出する検出手段と、
物品が集品容器から搬送経路にこぼれ落ちたときの状況を認識して、当該物品の集品容器からのこぼれ落ち傾向を判定する判定手段と、
を備えたことを特徴とする物品投入設備。
【請求項2】
判定手段は、物品のこぼれ落ちが発生したことを示す情報と、搬送経路へこぼれ落ちた物品の前後に存在する二つの集品容器を特定する情報とにもとづいて、こぼれ落ち傾向の判定を行うものであることを特徴とする請求項1記載の物品投入設備。
【請求項3】
判定手段は、物品のこぼれ落ちが発生したときの、搬送経路へこぼれ落ちた物品の前後に存在する二つの集品容器への物品の投入状況についての情報にもとづいて、こぼれ落ち傾向の判定を行うものであることを特徴とする請求項1記載の物品投入設備。
【請求項4】
物品の出し入れが可能な上方開口部を有する集品容器を搬送経路に沿って搬送する搬送装置と、搬送装置の搬送経路に沿って配置され、集品容器が搬送経路における物品の投入位置に達したときに、上方から集品容器の上方開口部へと物品の投入を行う投入装置とを備えた物品投入設備の運転状態を制御するに際し、
集品容器から搬送経路にこぼれ落ちた物品を検出し、
物品が集品容器から搬送経路にこぼれ落ちたときの状況を認識して、当該物品の集品容器からのこぼれ落ち傾向を判定する、
ことを特徴とする物品投入設備の制御方法。
【請求項1】
物品の出し入れが可能な上方開口部を有する集品容器を搬送経路に沿って搬送する搬送装置と、
搬送装置の搬送経路に沿って配置され、集品容器が搬送経路における物品の投入位置に達したときに、上方から集品容器の上方開口部へと物品の投入を行う投入装置と、
集品容器から搬送経路にこぼれ落ちた物品を検出する検出手段と、
物品が集品容器から搬送経路にこぼれ落ちたときの状況を認識して、当該物品の集品容器からのこぼれ落ち傾向を判定する判定手段と、
を備えたことを特徴とする物品投入設備。
【請求項2】
判定手段は、物品のこぼれ落ちが発生したことを示す情報と、搬送経路へこぼれ落ちた物品の前後に存在する二つの集品容器を特定する情報とにもとづいて、こぼれ落ち傾向の判定を行うものであることを特徴とする請求項1記載の物品投入設備。
【請求項3】
判定手段は、物品のこぼれ落ちが発生したときの、搬送経路へこぼれ落ちた物品の前後に存在する二つの集品容器への物品の投入状況についての情報にもとづいて、こぼれ落ち傾向の判定を行うものであることを特徴とする請求項1記載の物品投入設備。
【請求項4】
物品の出し入れが可能な上方開口部を有する集品容器を搬送経路に沿って搬送する搬送装置と、搬送装置の搬送経路に沿って配置され、集品容器が搬送経路における物品の投入位置に達したときに、上方から集品容器の上方開口部へと物品の投入を行う投入装置とを備えた物品投入設備の運転状態を制御するに際し、
集品容器から搬送経路にこぼれ落ちた物品を検出し、
物品が集品容器から搬送経路にこぼれ落ちたときの状況を認識して、当該物品の集品容器からのこぼれ落ち傾向を判定する、
ことを特徴とする物品投入設備の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−95590(P2013−95590A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−242960(P2011−242960)
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
[ Back to top ]