
物品投入設備および物品投入設備における集品容器からの物品のはみ出し検出方法
【課題】本発明は、集品容器から落下するおそれのある物品を正確に検出でき、設備の処理効率の低下を防止できる物品投入設備および物品投入設備における集品容器からの物品のはみ出し検出方法を提供する。
【解決手段】上方開放部から物品13が投入される集品容器12を搬送経路に沿って搬送する搬送装置14と、搬送経路に沿って配置され、集品容器12に対して物品13の投入を行う投入装置15と、搬送経路における投入装置15の下流側に配置され、搬送される集品容器12の上端より上方に位置する物体の存否を検出する光電センサ18と、光電センサ18による物体の搬送方向に沿った検出長さに基づいて検知距離を演算し、検知距離が予め設定される閾値を上回ると荷繰りが必要であると判定する構成とした。
【解決手段】上方開放部から物品13が投入される集品容器12を搬送経路に沿って搬送する搬送装置14と、搬送経路に沿って配置され、集品容器12に対して物品13の投入を行う投入装置15と、搬送経路における投入装置15の下流側に配置され、搬送される集品容器12の上端より上方に位置する物体の存否を検出する光電センサ18と、光電センサ18による物体の搬送方向に沿った検出長さに基づいて検知距離を演算し、検知距離が予め設定される閾値を上回ると荷繰りが必要であると判定する構成とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、投入装置により集品容器に物品を自動的に投入する物品投入設備および物品投入設備における集品容器からの物品のはみ出し検出方法に関する。
【背景技術】
【0002】
従来の物品投入設備が特許文献1に開示されている。
この特許文献1に記載された物品投入設備は、物品が投入される上方開口部を有する集品容器を搬送装置により搬送し、搬送装置による集品容器の搬送経路に沿って配置された投入装置によって、搬送される集品容器に物品を自動で上方から投入する設備である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−222328号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の物品投入設備では、投入装置により集品容器に物品の投入を行う際、集品容器の外に物品が落下する投入ミスが発生することがある。投入ミスが発生して物品が集品容器の外に落下すると、落下した物品の処理を行うために搬送装置を一旦停止する必要があり、設備の処理が滞ることになる。そのため、投入ミスの発生はできるだけ回避する必要がある。
【0005】
このような投入ミスが発生する主な原因の一つは、投入装置により自動的に集品容器に物品を投入するため、物品間に隙間が空いて物品が集品容器に収納されることにより、予定より早く集品容器に物品が一杯になってしまい、次の投入装置により投入される物品が集品容器に入り切らなくなることにある。作業者は、物品が一杯となって物品の落下のおそれがある集品容器を発見すると、釦スイッチを押圧操作する等して手動で搬送装置を停止する。そして、作業者により、物品で一杯となった集品容器内を均して、次の投入装置が集品容器内に物品を投入可能な空間を形成する「荷繰り」を行う。
このような「荷繰り」をより効率的に確実に行うために、物品のはみ出しを検知して、搬送装置を自動的に停止することが考えられる。
【0006】
しかしながら、単純に、集品容器からの物品のはみ出しを検知するだけでは、集品容器に被せた袋や集品容器から落下するおそれのない物品も検知してしまい、荷繰りを行う必要のない集品容器についてまで搬送装置が停止される場合があり、このような搬送装置の無駄な停止は、設備の処理効率の低下を招くことになり好ましくない。
【0007】
そこで、本発明は、集品容器から落下するおそれのある物品を正確に検出でき、設備の処理効率の低下を防止できる物品投入設備および物品投入設備における集品容器からの物品のはみ出し検出方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上述の目的を達成するために、本発明は、請求項1に記載の如く、上方開口部から物品が投入される集品容器を搬送経路に沿って搬送する搬送装置と、搬送経路に沿って配置され、集品容器に対して物品の投入を行う投入装置と、搬送経路における投入装置の下流側に配置され、搬送される集品容器の上端より上方に位置する物体の存否を検出する検知装置と、検知装置による物体の搬送方向に沿った検出長さに基づいて検知距離を演算し、検知距離が予め設定される閾値を上回ると荷繰りが必要であると判定する制御装置と、を備えたことを特徴とする。したがって本発明によれば、搬送される集品容器の上端より上方に位置する物体で、予め設定される閾値を上回る検知距離の物体が検知装置により検出されたときに、荷繰りが必要であると判定される。
【0009】
また本発明は、請求項5に記載の如く、上方開口部から物品が投入される集品容器を搬送経路に沿って搬送し、搬送経路に沿って配置される投入装置により集品容器に対する物品の投入を行い、搬送経路における投入装置の下流側に配置され、搬送される集品容器の上端より上方に位置する物体の存否を検出する検知装置により、物体の搬送方向に沿った検出長さに基づいて検知距離を演算し、検知距離が予め設定される閾値を上回ると荷繰りが必要であると判定することを特徴とする。このようにすると、搬送される集品容器の上端より上方に位置する物体で、予め設定される閾値を上回る検知距離の物体が検知装置により検出されたときに、荷繰りが必要であると判定され、不必要な荷繰りを防止できる。
【0010】
また本発明は、請求項2に記載の如く、搬送装置の駆動部に連動してパルス信号を発するエンコーダを備え、制御装置は、エンコーダのパルス信号に基づいて検知距離を演算可能であることが好適である。このような構成であると、検知距離の演算が行われる際に、搬送装置の搬送速度の影響を無くすことができ、検知精度の向上を図ることができる。
【0011】
また本発明は、請求項3に記載の如く、検知装置を、光の光軸が集品容器の上端より上方を通過するように構成した、投光部および受光部からなる光電センサにより構成し、集品容器は、透光性を有する集品用の袋を被せたものとしたことが好適である。このような構成であると、基本的に、光電センサの検知光が集品用の袋を透過するので、集品用の袋を集品容器からはみ出した物品として誤検知することが防止される。
【0012】
また本発明は、請求項4に記載の如く、制御装置により荷繰りが必要であると判定されると、荷繰りが必要な集品容器に対して物品を投入する予定の投入装置がどれであるかを特定する情報を表示する表示器を設けたことが好適である。このような構成であると、荷繰りが必要であると判定されると、表示器に荷繰りが必要な集品容器に対して物品を投入する予定の投入装置がどれであるかを特定する情報が表示されるので、作業者は、荷繰りが必要な集品容器に対して物品を投入する予定の投入装置の物品を確認可能とされ、集品容器内に必要となる空きスペースの大きさを見積もりながら荷繰りを行うことが可能とされる。
【発明の効果】
【0013】
本発明の物品投入設備および集品容器に対する物品投入設備における集品容器からの物品のはみ出し検出方法によれば、搬送される集品容器の上端より上方にはみ出して集品容器から落下のおそれのある物品のみが正確に検知され、搬送装置の無駄な停止が防止され、設備全体の処理効率の低下を防止できる。
【図面の簡単な説明】
【0014】
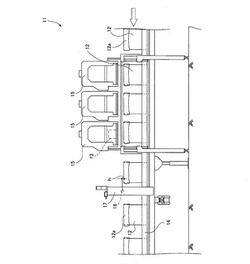
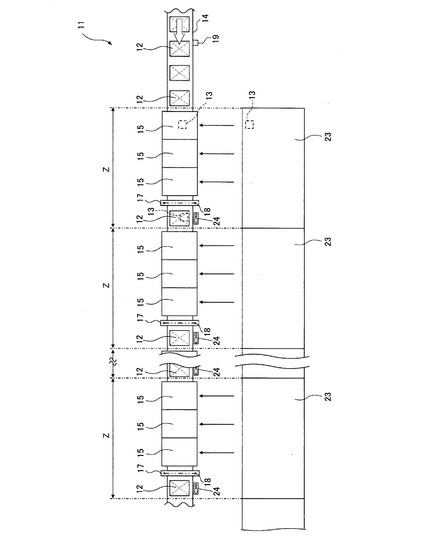
【図1】本発明の実施形態における物品投入設備の全体構成を示す平面図である。
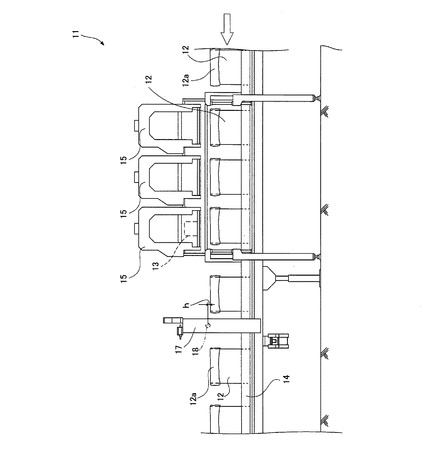
【図2】同物品投入設備の要部側面図である。
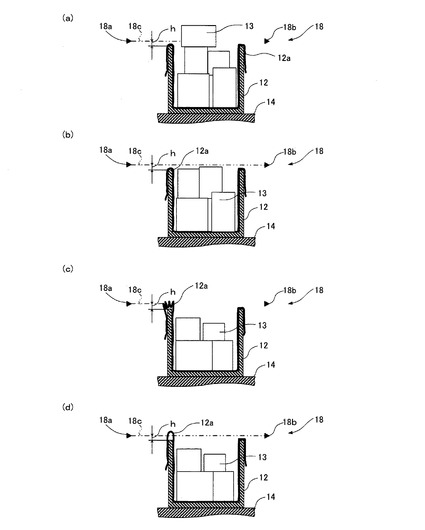
【図3】同物品投入設備における物品のはみ出し検出方法を説明する正面断面図であり、(a)は、物品が集品容器の上端からはみ出している場合、(b)は、物品が集品容器の上端からはみ出していない場合、(c)は、袋にしわが寄っている場合、(d)は、袋にしわは寄っていないが、袋が光電センサの光軸にかかっている場合を示す。
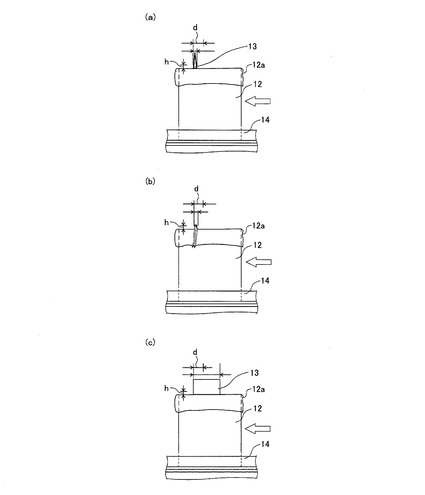
【図4】同物品投入設備の物品のはみ出し検出方法を説明する要部側面図であり、(a)は、厚みの薄い物品がはみ出している場合、(b)は、袋にしわが寄っている場合、(c)は、搬送方向に厚みのある物品がはみ出している場合を示す。
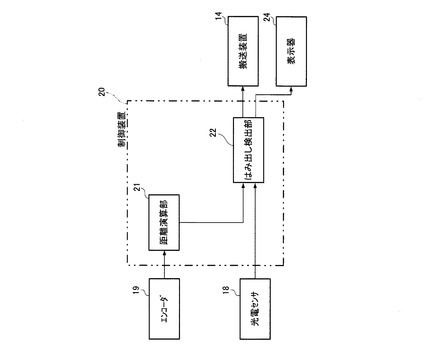
【図5】同物品投入設備の制御構成図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施形態を図面に基づいて説明する。
図1は、集品容器12に物品13を自動的に投入するための物品投入設備11の全体構成を示す平面図である。
この物品投入設備11は、搬送装置14により複数の集品容器12を搬送経路に沿って搬送し、搬送経路に沿って配置された投入装置15によって物品13を集品容器12に自動的に投入する設備である。
【0016】
物品投入設備11には、作業者(図示せず)が作業を担当する作業領域Z(ゾーンともいう)が複数配置されている。
作業領域Zには、種類毎の物品を保管する物品保管手段23、作業者によって物品保管手段23から取り出された物品13を搬送装置14により搬送される集品容器12に自動的に投入する複数の投入装置15、集品容器12について物品13のはみ出しを検知する検知装置が取り付けられた門型のフレーム17、ディジタル表示部等を有する表示器24が備えられている。
【0017】
図2に示すように、投入装置15は、搬送装置14の上方に設置され、搬送装置14により水平方向に搬送される集品容器12に対し、上方から物品13を落として集品容器12の上方開口部より物品13の投入を行う。集品容器12には、集品用の透光性を有する袋12aが被されているのが通常であるが、集品容器12に袋12aを被せるか否かは任意である。
【0018】
作業領域Zの作業者は、集品容器12に対応する物品13を物品保管手段23から取り出して、いずれかの投入装置15の中に載置する。作業者により物品13の載置された投入装置15は、投入装置15に目的の集品容器12が近づくと、投入動作を開始して集品容器12に物品13を自動的に投入する。
【0019】
投入装置15により物品13が投入された集品容器12は、門型のフレーム17をくぐって搬送され、門型のフレーム17の左右内側に設けられた検知装置によって、集品容器12から物品13がはみ出しているか否かの検査が行われる。
検知装置は、搬送装置14により搬送される集品容器12の上端よりも上方に位置する物体の存否を検知するものである。より具体的には、検知装置は、例えば、投光部18aと投光部18aに対向される受光部18bからなる光電センサ18により構成することが好適である。この場合、投光部18aから受光部18bに向かう光の光軸18cが、図2や図3に示すように、集品容器12の上端より距離hだけやや上方の位置を通過するように構成されている。集品容器12の上端よりやや上方の距離hの位置を検知することにより、光電センサ18が、落下のおそれのない物品13を検知する等の可能性が低減される。この距離hは、例えば、約10mm程度とすることが好適であり、これにより、光電センサ18の光軸18cが、集品容器12の上端の袋12aの折り返し部分にかかる可能性を低減でき、袋12aを物品13として誤検知するおそれがさらに低減される。
袋12aは透光性があり、集品容器12に対する被せ方が不十分で袋12aが光電センサ18の光軸18cに入り込んでも、基本的に、光電センサ18の検知光が袋12aを透過するので、この袋12aを物品13として誤検知することはないが、袋12aにしわが寄っている場合等には、しわの寄った部分に透光性がなくなり、光が透過せずに物品13として誤検知する可能性がある。しかし、経験的にしわがあまり大きな範囲にわたって形成されることはない。そこで、閾値を設定することにより、このような誤検知が防止される。
【0020】
図3は、光電センサ18による物体を検知する高さについて説明する正面断面図である。図3(a)に示すように、集品容器12の上端から物品13がはみ出している場合は、投光部18aからの光が物品13により遮断され、受光部18bに到達せず、光電センサ18は物体の検知信号を出力する。
また、図3(b)に示すように、集品容器12の上端より下に物品13が収まっている場合と、上方への物品のはみだしが距離h未満の場合は、投光部18aからの光は遮られることなく受光部18bに到達し、光電センサ18は物体の非検知信号を出力する。
【0021】
さらに、図3(c)に示すように、集品容器12の上端の近傍で、袋12aにしわが折り重なって寄っている場合は、袋12aが透光性を有するにもかかわらず、投光部18aからの光は袋12aの折り重なった部分に遮られ、受光部18bに到達せず、光電センサ18は物体の検知信号を出力する。
そして、図3(d)に示すように、集品容器12の上端の近傍では袋12aが折り重なっていないが、光軸18cにかかっている場合は、投光部18aからの光は袋12aを透過して受光部18bに到達し、光電センサ18は物体の非検知信号を出力する。このように、光センサ装置18は、折り重なっていない袋12aは光を透過するように構成されていることが好適である。これにより、光電センサ18が袋12aを物品13として誤検知することが防止され、搬送装置14の無駄な停止を防止できる。
【0022】
搬送装置14には、搬送距離を演算するためのパルス信号を発するエンコーダ19が備えられている(図1,図5)。エンコーダ19は、搬送装置14の駆動部の回転に連動してパルス信号を発するものであり、搬送装置14の搬送速度に依存することなく、搬送装置14による搬送距離を正確に求めるために用いられる。これにより、検知距離の演算が行われる際に、搬送装置の搬送速度の影響を無くすことができ、検知精度の向上を図ることができる。
【0023】
また物品投入設備11には、図5に示すように、エンコーダ19および光電センサ18の入力信号に基づいて、作業者による荷繰りのために搬送装置14の停止や減速、表示器24による投入装置を特定する情報の表示などを行う制御装置20が備えられている。制御装置20は、距離演算部21と、はみ出し検出部22を有している。
【0024】
距離演算部21は、エンコーダ19より入力したパルス信号を搬送距離に変換して出力する。はみ出し検出部22は、検知距離の閾値(閾値長さd)が予め設定されている(図4)。はみ出し検出部22は、光電センサ18から物体の検知信号を入力してから光電センサ18から物体の検知信号を連続して入力している間、搬送距離の差分として検知距離を演算する。検知距離とは、すなわち、集品容器12の上端からはみ出た物品13の搬送方向の長さである。
【0025】
はみ出し検出部22は、演算している検知距離が、閾値長さdを上回ると、荷繰りが必要であると判定して、搬送装置14に停止信号を出力し、搬送装置14による集品容器12の搬送を停止する。またはみ出し検出部22は、演算している検知距離が閾値長さdを超えるまでに、光電センサ18から物体の非検知信号が入力されると、演算していた検知距離をゼロにリセットする。これにより、搬送される集品容器の上端より上方に位置する物体で、予め設定される閾値を上回る検知距離の物体が検知装置により検出されたときに、荷繰りが必要であると判定され、不必要な荷繰りを防止できる。
【0026】
また、はみ出し検出部22は、荷繰りが必要であると判定すると、荷繰りが必要な集品容器に対して物品を投入する予定の投入装置がどれであるかを特定する情報を表示器に表示する。作業者は、荷繰りが必要な集品容器に対して物品を投入する予定の投入装置の物品を確認可能とされ、集品容器内に必要となる空きスペースの大きさを見積もりながら荷繰りを行うことが可能とされる。例えば、図1に示すように、1つの作業領域Z内に投入装置15を3台設置する場合、各投入装置15には、搬送方向順にNo.1,No.2,No.3と番号が付されているとする。はみ出し検出部22により荷繰りが必要であると判定されたとき、荷繰りが必要な集品容器12に対して、No.1の投入装置15からは物品の投入予定が無く、No.2とNo.3の投入装置からは物品を投入する予定がある場合、表示器24のディジタル表示部等には「3 2 −」等のように、投入装置に付された番号を表示する。これにより、作業者は、No.2とNo.3の投入装置15の物品13を確認可能となり、集品容器内にNo.2とNo.3の投入装置15から新たに物品を投入する際に必要となる空きスペースの大きさを見積もりながら荷繰りを行うことが可能とされる。
【0027】
集品容器12から物品13のはみ出しが検出されて、制御装置20により搬送装置14が停止されると、作業者は、物品13のはみ出しが検出された集品容器12について荷繰りを行い、再度、搬送装置14を、釦スイッチを押圧操作する等して手動で再起動する。
【0028】
図4に、集品容器12の状態の具体例を示す。
図4(a)は、厚みの薄い袋状や板状の物品13が集品容器12の上端からはみ出している場合を示している。この場合、板状の物品の搬送方向の長さ(厚み)が、閾値長さdを下回っているため、制御装置20により搬送装置14は停止されない。このような厚みの薄い板状の物品13は、集品容器12から落下するおそれは殆どないため、これにより、搬送装置14の無駄な停止が防止される。
【0029】
図4(b)は、集品容器12に被せた袋12aに、搬送方向に折り重なってしわが寄っている場合を示している。この場合、袋12aに形成されたしわの搬送方向長さが、閾値長さdを下回っているときは、制御装置20により搬送装置14は停止されず、一方、閾値長さdを上回っているときは、制御装置20により搬送装置14が停止される。経験上、集品容器12に被せた袋12aの一部にしわが寄っていても、しわの部分が集品容器12の搬送方向に長く形成されることは稀であるので、例えば、閾値長さdを30mm程度に設定しておけば、袋12aに形成されたしわの部分を物品13として誤検知することをほぼ回避できる。
【0030】
図4(c)は、搬送方向に長い(厚みのある)物品13が集品容器12の上端からはみ出している場合を示している。この場合は、制御装置20により搬送装置14は停止される。搬送方向に長い物品13が、検知距離の閾値長さdを上回っているためである。
これにより、物品13の落下のおそれのある集品容器12を正確に検知することができる。
【0031】
ある作業領域Zで、光電センサ18によりはみ出しが検知されたなら、その作業領域Z内で荷繰りを行って、はみ出しを解消した状態で投入装置15を次の作業領域Zに搬送することができる(図1)。なお、場合によっては、複数の作業領域Zごとに1つの光電センサ18を設けた構成とすることも可能である。
また、物品保管手段23と投入装置15との間に、投入装置15へ物品13を送り込むためのコンベヤが設けられていてもよい。
さらに、エンコーダ19の代わりに、複数の光電センサ18を用いてもよい。すなわち、複数の光電センサ18を、最上流の光電センサ18と最下流の光電センサ18との間の距離を閾値長さdとして、各光軸18cが搬送方向に並ぶように配置するようにしてもよい。この場合、全ての光電センサ18が物体の検出信号を出力したときに、制御装置20により荷繰りが必要であると判定されて搬送装置14が停止される。この手法によっても、搬送装置14の搬送速度に依存することなく、物品13のはみ出しを検出できる。
【0032】
以上のように、本実施形態の物品投入設備によれば、上方開放部から物品13が投入される集品容器12を搬送経路に沿って搬送する搬送装置14と、搬送経路に沿って配置され、集品容器12に対して物品13の投入を行う投入装置15と、搬送経路における投入装置15の下流側に配置され、搬送される集品容器12の上端より上方に位置する物体の存否を検出する光電センサ18と、光電センサ18による物体の搬送方向に沿った検出長さに基づいて検知距離を演算し、検知距離が予め設定される閾値を上回ると荷繰りが必要であると判定することにより、集品容器12から落下のおそれのある物品13のみが正確に検知され、搬送装置14の無駄な停止が防止され、設備全体の処理効率の低下を防止できる。
【符号の説明】
【0033】
d 閾値長さ
h 距離
Z 作業領域
11 物品投入設備
12 集品容器
12a 袋
13 物品
14 搬送装置
15 投入装置
17 フレーム
18 光電センサ
18a 投光部
18b 受光部
18c 光軸
19 エンコーダ
20 制御装置
21 距離演算部
22 はみ出し検出部
23 物品保管手段
24 表示器
【技術分野】
【0001】
本発明は、投入装置により集品容器に物品を自動的に投入する物品投入設備および物品投入設備における集品容器からの物品のはみ出し検出方法に関する。
【背景技術】
【0002】
従来の物品投入設備が特許文献1に開示されている。
この特許文献1に記載された物品投入設備は、物品が投入される上方開口部を有する集品容器を搬送装置により搬送し、搬送装置による集品容器の搬送経路に沿って配置された投入装置によって、搬送される集品容器に物品を自動で上方から投入する設備である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−222328号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の物品投入設備では、投入装置により集品容器に物品の投入を行う際、集品容器の外に物品が落下する投入ミスが発生することがある。投入ミスが発生して物品が集品容器の外に落下すると、落下した物品の処理を行うために搬送装置を一旦停止する必要があり、設備の処理が滞ることになる。そのため、投入ミスの発生はできるだけ回避する必要がある。
【0005】
このような投入ミスが発生する主な原因の一つは、投入装置により自動的に集品容器に物品を投入するため、物品間に隙間が空いて物品が集品容器に収納されることにより、予定より早く集品容器に物品が一杯になってしまい、次の投入装置により投入される物品が集品容器に入り切らなくなることにある。作業者は、物品が一杯となって物品の落下のおそれがある集品容器を発見すると、釦スイッチを押圧操作する等して手動で搬送装置を停止する。そして、作業者により、物品で一杯となった集品容器内を均して、次の投入装置が集品容器内に物品を投入可能な空間を形成する「荷繰り」を行う。
このような「荷繰り」をより効率的に確実に行うために、物品のはみ出しを検知して、搬送装置を自動的に停止することが考えられる。
【0006】
しかしながら、単純に、集品容器からの物品のはみ出しを検知するだけでは、集品容器に被せた袋や集品容器から落下するおそれのない物品も検知してしまい、荷繰りを行う必要のない集品容器についてまで搬送装置が停止される場合があり、このような搬送装置の無駄な停止は、設備の処理効率の低下を招くことになり好ましくない。
【0007】
そこで、本発明は、集品容器から落下するおそれのある物品を正確に検出でき、設備の処理効率の低下を防止できる物品投入設備および物品投入設備における集品容器からの物品のはみ出し検出方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上述の目的を達成するために、本発明は、請求項1に記載の如く、上方開口部から物品が投入される集品容器を搬送経路に沿って搬送する搬送装置と、搬送経路に沿って配置され、集品容器に対して物品の投入を行う投入装置と、搬送経路における投入装置の下流側に配置され、搬送される集品容器の上端より上方に位置する物体の存否を検出する検知装置と、検知装置による物体の搬送方向に沿った検出長さに基づいて検知距離を演算し、検知距離が予め設定される閾値を上回ると荷繰りが必要であると判定する制御装置と、を備えたことを特徴とする。したがって本発明によれば、搬送される集品容器の上端より上方に位置する物体で、予め設定される閾値を上回る検知距離の物体が検知装置により検出されたときに、荷繰りが必要であると判定される。
【0009】
また本発明は、請求項5に記載の如く、上方開口部から物品が投入される集品容器を搬送経路に沿って搬送し、搬送経路に沿って配置される投入装置により集品容器に対する物品の投入を行い、搬送経路における投入装置の下流側に配置され、搬送される集品容器の上端より上方に位置する物体の存否を検出する検知装置により、物体の搬送方向に沿った検出長さに基づいて検知距離を演算し、検知距離が予め設定される閾値を上回ると荷繰りが必要であると判定することを特徴とする。このようにすると、搬送される集品容器の上端より上方に位置する物体で、予め設定される閾値を上回る検知距離の物体が検知装置により検出されたときに、荷繰りが必要であると判定され、不必要な荷繰りを防止できる。
【0010】
また本発明は、請求項2に記載の如く、搬送装置の駆動部に連動してパルス信号を発するエンコーダを備え、制御装置は、エンコーダのパルス信号に基づいて検知距離を演算可能であることが好適である。このような構成であると、検知距離の演算が行われる際に、搬送装置の搬送速度の影響を無くすことができ、検知精度の向上を図ることができる。
【0011】
また本発明は、請求項3に記載の如く、検知装置を、光の光軸が集品容器の上端より上方を通過するように構成した、投光部および受光部からなる光電センサにより構成し、集品容器は、透光性を有する集品用の袋を被せたものとしたことが好適である。このような構成であると、基本的に、光電センサの検知光が集品用の袋を透過するので、集品用の袋を集品容器からはみ出した物品として誤検知することが防止される。
【0012】
また本発明は、請求項4に記載の如く、制御装置により荷繰りが必要であると判定されると、荷繰りが必要な集品容器に対して物品を投入する予定の投入装置がどれであるかを特定する情報を表示する表示器を設けたことが好適である。このような構成であると、荷繰りが必要であると判定されると、表示器に荷繰りが必要な集品容器に対して物品を投入する予定の投入装置がどれであるかを特定する情報が表示されるので、作業者は、荷繰りが必要な集品容器に対して物品を投入する予定の投入装置の物品を確認可能とされ、集品容器内に必要となる空きスペースの大きさを見積もりながら荷繰りを行うことが可能とされる。
【発明の効果】
【0013】
本発明の物品投入設備および集品容器に対する物品投入設備における集品容器からの物品のはみ出し検出方法によれば、搬送される集品容器の上端より上方にはみ出して集品容器から落下のおそれのある物品のみが正確に検知され、搬送装置の無駄な停止が防止され、設備全体の処理効率の低下を防止できる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態における物品投入設備の全体構成を示す平面図である。
【図2】同物品投入設備の要部側面図である。
【図3】同物品投入設備における物品のはみ出し検出方法を説明する正面断面図であり、(a)は、物品が集品容器の上端からはみ出している場合、(b)は、物品が集品容器の上端からはみ出していない場合、(c)は、袋にしわが寄っている場合、(d)は、袋にしわは寄っていないが、袋が光電センサの光軸にかかっている場合を示す。
【図4】同物品投入設備の物品のはみ出し検出方法を説明する要部側面図であり、(a)は、厚みの薄い物品がはみ出している場合、(b)は、袋にしわが寄っている場合、(c)は、搬送方向に厚みのある物品がはみ出している場合を示す。
【図5】同物品投入設備の制御構成図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施形態を図面に基づいて説明する。
図1は、集品容器12に物品13を自動的に投入するための物品投入設備11の全体構成を示す平面図である。
この物品投入設備11は、搬送装置14により複数の集品容器12を搬送経路に沿って搬送し、搬送経路に沿って配置された投入装置15によって物品13を集品容器12に自動的に投入する設備である。
【0016】
物品投入設備11には、作業者(図示せず)が作業を担当する作業領域Z(ゾーンともいう)が複数配置されている。
作業領域Zには、種類毎の物品を保管する物品保管手段23、作業者によって物品保管手段23から取り出された物品13を搬送装置14により搬送される集品容器12に自動的に投入する複数の投入装置15、集品容器12について物品13のはみ出しを検知する検知装置が取り付けられた門型のフレーム17、ディジタル表示部等を有する表示器24が備えられている。
【0017】
図2に示すように、投入装置15は、搬送装置14の上方に設置され、搬送装置14により水平方向に搬送される集品容器12に対し、上方から物品13を落として集品容器12の上方開口部より物品13の投入を行う。集品容器12には、集品用の透光性を有する袋12aが被されているのが通常であるが、集品容器12に袋12aを被せるか否かは任意である。
【0018】
作業領域Zの作業者は、集品容器12に対応する物品13を物品保管手段23から取り出して、いずれかの投入装置15の中に載置する。作業者により物品13の載置された投入装置15は、投入装置15に目的の集品容器12が近づくと、投入動作を開始して集品容器12に物品13を自動的に投入する。
【0019】
投入装置15により物品13が投入された集品容器12は、門型のフレーム17をくぐって搬送され、門型のフレーム17の左右内側に設けられた検知装置によって、集品容器12から物品13がはみ出しているか否かの検査が行われる。
検知装置は、搬送装置14により搬送される集品容器12の上端よりも上方に位置する物体の存否を検知するものである。より具体的には、検知装置は、例えば、投光部18aと投光部18aに対向される受光部18bからなる光電センサ18により構成することが好適である。この場合、投光部18aから受光部18bに向かう光の光軸18cが、図2や図3に示すように、集品容器12の上端より距離hだけやや上方の位置を通過するように構成されている。集品容器12の上端よりやや上方の距離hの位置を検知することにより、光電センサ18が、落下のおそれのない物品13を検知する等の可能性が低減される。この距離hは、例えば、約10mm程度とすることが好適であり、これにより、光電センサ18の光軸18cが、集品容器12の上端の袋12aの折り返し部分にかかる可能性を低減でき、袋12aを物品13として誤検知するおそれがさらに低減される。
袋12aは透光性があり、集品容器12に対する被せ方が不十分で袋12aが光電センサ18の光軸18cに入り込んでも、基本的に、光電センサ18の検知光が袋12aを透過するので、この袋12aを物品13として誤検知することはないが、袋12aにしわが寄っている場合等には、しわの寄った部分に透光性がなくなり、光が透過せずに物品13として誤検知する可能性がある。しかし、経験的にしわがあまり大きな範囲にわたって形成されることはない。そこで、閾値を設定することにより、このような誤検知が防止される。
【0020】
図3は、光電センサ18による物体を検知する高さについて説明する正面断面図である。図3(a)に示すように、集品容器12の上端から物品13がはみ出している場合は、投光部18aからの光が物品13により遮断され、受光部18bに到達せず、光電センサ18は物体の検知信号を出力する。
また、図3(b)に示すように、集品容器12の上端より下に物品13が収まっている場合と、上方への物品のはみだしが距離h未満の場合は、投光部18aからの光は遮られることなく受光部18bに到達し、光電センサ18は物体の非検知信号を出力する。
【0021】
さらに、図3(c)に示すように、集品容器12の上端の近傍で、袋12aにしわが折り重なって寄っている場合は、袋12aが透光性を有するにもかかわらず、投光部18aからの光は袋12aの折り重なった部分に遮られ、受光部18bに到達せず、光電センサ18は物体の検知信号を出力する。
そして、図3(d)に示すように、集品容器12の上端の近傍では袋12aが折り重なっていないが、光軸18cにかかっている場合は、投光部18aからの光は袋12aを透過して受光部18bに到達し、光電センサ18は物体の非検知信号を出力する。このように、光センサ装置18は、折り重なっていない袋12aは光を透過するように構成されていることが好適である。これにより、光電センサ18が袋12aを物品13として誤検知することが防止され、搬送装置14の無駄な停止を防止できる。
【0022】
搬送装置14には、搬送距離を演算するためのパルス信号を発するエンコーダ19が備えられている(図1,図5)。エンコーダ19は、搬送装置14の駆動部の回転に連動してパルス信号を発するものであり、搬送装置14の搬送速度に依存することなく、搬送装置14による搬送距離を正確に求めるために用いられる。これにより、検知距離の演算が行われる際に、搬送装置の搬送速度の影響を無くすことができ、検知精度の向上を図ることができる。
【0023】
また物品投入設備11には、図5に示すように、エンコーダ19および光電センサ18の入力信号に基づいて、作業者による荷繰りのために搬送装置14の停止や減速、表示器24による投入装置を特定する情報の表示などを行う制御装置20が備えられている。制御装置20は、距離演算部21と、はみ出し検出部22を有している。
【0024】
距離演算部21は、エンコーダ19より入力したパルス信号を搬送距離に変換して出力する。はみ出し検出部22は、検知距離の閾値(閾値長さd)が予め設定されている(図4)。はみ出し検出部22は、光電センサ18から物体の検知信号を入力してから光電センサ18から物体の検知信号を連続して入力している間、搬送距離の差分として検知距離を演算する。検知距離とは、すなわち、集品容器12の上端からはみ出た物品13の搬送方向の長さである。
【0025】
はみ出し検出部22は、演算している検知距離が、閾値長さdを上回ると、荷繰りが必要であると判定して、搬送装置14に停止信号を出力し、搬送装置14による集品容器12の搬送を停止する。またはみ出し検出部22は、演算している検知距離が閾値長さdを超えるまでに、光電センサ18から物体の非検知信号が入力されると、演算していた検知距離をゼロにリセットする。これにより、搬送される集品容器の上端より上方に位置する物体で、予め設定される閾値を上回る検知距離の物体が検知装置により検出されたときに、荷繰りが必要であると判定され、不必要な荷繰りを防止できる。
【0026】
また、はみ出し検出部22は、荷繰りが必要であると判定すると、荷繰りが必要な集品容器に対して物品を投入する予定の投入装置がどれであるかを特定する情報を表示器に表示する。作業者は、荷繰りが必要な集品容器に対して物品を投入する予定の投入装置の物品を確認可能とされ、集品容器内に必要となる空きスペースの大きさを見積もりながら荷繰りを行うことが可能とされる。例えば、図1に示すように、1つの作業領域Z内に投入装置15を3台設置する場合、各投入装置15には、搬送方向順にNo.1,No.2,No.3と番号が付されているとする。はみ出し検出部22により荷繰りが必要であると判定されたとき、荷繰りが必要な集品容器12に対して、No.1の投入装置15からは物品の投入予定が無く、No.2とNo.3の投入装置からは物品を投入する予定がある場合、表示器24のディジタル表示部等には「3 2 −」等のように、投入装置に付された番号を表示する。これにより、作業者は、No.2とNo.3の投入装置15の物品13を確認可能となり、集品容器内にNo.2とNo.3の投入装置15から新たに物品を投入する際に必要となる空きスペースの大きさを見積もりながら荷繰りを行うことが可能とされる。
【0027】
集品容器12から物品13のはみ出しが検出されて、制御装置20により搬送装置14が停止されると、作業者は、物品13のはみ出しが検出された集品容器12について荷繰りを行い、再度、搬送装置14を、釦スイッチを押圧操作する等して手動で再起動する。
【0028】
図4に、集品容器12の状態の具体例を示す。
図4(a)は、厚みの薄い袋状や板状の物品13が集品容器12の上端からはみ出している場合を示している。この場合、板状の物品の搬送方向の長さ(厚み)が、閾値長さdを下回っているため、制御装置20により搬送装置14は停止されない。このような厚みの薄い板状の物品13は、集品容器12から落下するおそれは殆どないため、これにより、搬送装置14の無駄な停止が防止される。
【0029】
図4(b)は、集品容器12に被せた袋12aに、搬送方向に折り重なってしわが寄っている場合を示している。この場合、袋12aに形成されたしわの搬送方向長さが、閾値長さdを下回っているときは、制御装置20により搬送装置14は停止されず、一方、閾値長さdを上回っているときは、制御装置20により搬送装置14が停止される。経験上、集品容器12に被せた袋12aの一部にしわが寄っていても、しわの部分が集品容器12の搬送方向に長く形成されることは稀であるので、例えば、閾値長さdを30mm程度に設定しておけば、袋12aに形成されたしわの部分を物品13として誤検知することをほぼ回避できる。
【0030】
図4(c)は、搬送方向に長い(厚みのある)物品13が集品容器12の上端からはみ出している場合を示している。この場合は、制御装置20により搬送装置14は停止される。搬送方向に長い物品13が、検知距離の閾値長さdを上回っているためである。
これにより、物品13の落下のおそれのある集品容器12を正確に検知することができる。
【0031】
ある作業領域Zで、光電センサ18によりはみ出しが検知されたなら、その作業領域Z内で荷繰りを行って、はみ出しを解消した状態で投入装置15を次の作業領域Zに搬送することができる(図1)。なお、場合によっては、複数の作業領域Zごとに1つの光電センサ18を設けた構成とすることも可能である。
また、物品保管手段23と投入装置15との間に、投入装置15へ物品13を送り込むためのコンベヤが設けられていてもよい。
さらに、エンコーダ19の代わりに、複数の光電センサ18を用いてもよい。すなわち、複数の光電センサ18を、最上流の光電センサ18と最下流の光電センサ18との間の距離を閾値長さdとして、各光軸18cが搬送方向に並ぶように配置するようにしてもよい。この場合、全ての光電センサ18が物体の検出信号を出力したときに、制御装置20により荷繰りが必要であると判定されて搬送装置14が停止される。この手法によっても、搬送装置14の搬送速度に依存することなく、物品13のはみ出しを検出できる。
【0032】
以上のように、本実施形態の物品投入設備によれば、上方開放部から物品13が投入される集品容器12を搬送経路に沿って搬送する搬送装置14と、搬送経路に沿って配置され、集品容器12に対して物品13の投入を行う投入装置15と、搬送経路における投入装置15の下流側に配置され、搬送される集品容器12の上端より上方に位置する物体の存否を検出する光電センサ18と、光電センサ18による物体の搬送方向に沿った検出長さに基づいて検知距離を演算し、検知距離が予め設定される閾値を上回ると荷繰りが必要であると判定することにより、集品容器12から落下のおそれのある物品13のみが正確に検知され、搬送装置14の無駄な停止が防止され、設備全体の処理効率の低下を防止できる。
【符号の説明】
【0033】
d 閾値長さ
h 距離
Z 作業領域
11 物品投入設備
12 集品容器
12a 袋
13 物品
14 搬送装置
15 投入装置
17 フレーム
18 光電センサ
18a 投光部
18b 受光部
18c 光軸
19 エンコーダ
20 制御装置
21 距離演算部
22 はみ出し検出部
23 物品保管手段
24 表示器
【特許請求の範囲】
【請求項1】
上方開口部から物品が投入される集品容器を搬送経路に沿って搬送する搬送装置と、
搬送経路に沿って配置され、集品容器に対して物品の投入を行う投入装置と、
搬送経路における投入装置の下流側に配置され、搬送される集品容器の上端より上方に位置する物体の存否を検出する検知装置と、
検知装置による物体の搬送方向に沿った検出長さに基づいて検知距離を演算し、検知距離が予め設定される閾値を上回ると荷繰りが必要であると判定する制御装置と、を備えたこと
を特徴とする物品投入設備。
【請求項2】
搬送装置の駆動部に連動してパルス信号を発するエンコーダを備え、
制御装置は、エンコーダのパルス信号に基づいて検知距離を演算可能であること
を特徴とする請求項1に記載の物品投入設備。
【請求項3】
検知装置を、光の光軸が集品容器の上端より上方を通過するように構成した、投光部および受光部からなる光電センサにより構成し、
集品容器は、透光性を有する集品用の袋を被せたものとしたこと
を特徴とする請求項1または2に記載の物品投入設備。
【請求項4】
投入装置を複数設け、
制御装置により荷繰りが必要であると判定されると、荷繰りが必要な集品容器に対して物品を投入する予定の投入装置がどれであるかを特定する情報を表示する表示器を設けたこと
を特徴とする請求項1〜3に記載の物品投入設備。
【請求項5】
上方開口部から物品が投入される集品容器を搬送経路に沿って搬送し、搬送経路に沿って配置される投入装置により集品容器に対する物品の投入を行い、搬送経路における投入装置の下流側に配置され、搬送される集品容器の上端より上方に位置する物体の存否を検出する検知装置により、物体の搬送方向に沿った検出長さに基づいて検知距離を演算し、検知距離が予め設定される閾値を上回ると荷繰りが必要であると判定すること
を特徴とする物品投入設備における集品容器からの物品のはみ出し検出方法。
【請求項1】
上方開口部から物品が投入される集品容器を搬送経路に沿って搬送する搬送装置と、
搬送経路に沿って配置され、集品容器に対して物品の投入を行う投入装置と、
搬送経路における投入装置の下流側に配置され、搬送される集品容器の上端より上方に位置する物体の存否を検出する検知装置と、
検知装置による物体の搬送方向に沿った検出長さに基づいて検知距離を演算し、検知距離が予め設定される閾値を上回ると荷繰りが必要であると判定する制御装置と、を備えたこと
を特徴とする物品投入設備。
【請求項2】
搬送装置の駆動部に連動してパルス信号を発するエンコーダを備え、
制御装置は、エンコーダのパルス信号に基づいて検知距離を演算可能であること
を特徴とする請求項1に記載の物品投入設備。
【請求項3】
検知装置を、光の光軸が集品容器の上端より上方を通過するように構成した、投光部および受光部からなる光電センサにより構成し、
集品容器は、透光性を有する集品用の袋を被せたものとしたこと
を特徴とする請求項1または2に記載の物品投入設備。
【請求項4】
投入装置を複数設け、
制御装置により荷繰りが必要であると判定されると、荷繰りが必要な集品容器に対して物品を投入する予定の投入装置がどれであるかを特定する情報を表示する表示器を設けたこと
を特徴とする請求項1〜3に記載の物品投入設備。
【請求項5】
上方開口部から物品が投入される集品容器を搬送経路に沿って搬送し、搬送経路に沿って配置される投入装置により集品容器に対する物品の投入を行い、搬送経路における投入装置の下流側に配置され、搬送される集品容器の上端より上方に位置する物体の存否を検出する検知装置により、物体の搬送方向に沿った検出長さに基づいて検知距離を演算し、検知距離が予め設定される閾値を上回ると荷繰りが必要であると判定すること
を特徴とする物品投入設備における集品容器からの物品のはみ出し検出方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−95587(P2013−95587A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−242957(P2011−242957)
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
[ Back to top ]