
物品搬送受渡し装置
【課題】 搬送時に物品が停止することなく、作業能率の高い物品搬送受渡し装置を提供することを目的とする。
【解決手段】 前ストッパ13と後ストッパ14は、上下方向で対応物品P1,P2に対する係止位置と解除位置との間で移動可能、そして前後方向ではつながりをもつ前方範囲と後方範囲の間でそれぞれ前後移動可能で前進時に対応物品と係止し後退時に係止解除されるようになっており、前ストッパ13と後ストッパ14は、一方が係止状態のときは他方が解除状態となり、一方が解除状態のときは、他方が係止状態となるように設定され、プッシャ15は、前ストッパの最前位置での係止状態から解除状態への移行時に、解除状態から押圧状態に入り物品を搬送部20へ向け押し出す。
【解決手段】 前ストッパ13と後ストッパ14は、上下方向で対応物品P1,P2に対する係止位置と解除位置との間で移動可能、そして前後方向ではつながりをもつ前方範囲と後方範囲の間でそれぞれ前後移動可能で前進時に対応物品と係止し後退時に係止解除されるようになっており、前ストッパ13と後ストッパ14は、一方が係止状態のときは他方が解除状態となり、一方が解除状態のときは、他方が係止状態となるように設定され、プッシャ15は、前ストッパの最前位置での係止状態から解除状態への移行時に、解除状態から押圧状態に入り物品を搬送部20へ向け押し出す。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、供給部から供給される物品を、後続の物品との間に所定間隔を保ちながら搬送部へ受渡す物品搬送受渡し装置に関する。
【背景技術】
【0002】
物品が複数の工程を経て製品とされる際、複数の物品は供給部で連ねられている状態から、搬送部へ受け渡される際に、次工程で必要とされる物品間間隔が形成される。かかる供給部そして搬送部を備える装置として、添付図面の図3に示される装置が知られている(特許文献、非特許文献発見できず)。
【0003】
図3装置では、供給部50は物品Pをその自重によって前方(図にて左方)へ自動供給する傾斜ガイド部51と、該傾斜ガイド部51から前方へ延びる水平ガイド部52とを有し、該水平ガイド部52が搬送部60へ連絡するようになっている。
【0004】
上記水平ガイド部52には、その幅方向(紙面に対し直角方向)の中間部に、前後に延びる溝が形成されていて、該溝へロッド状の前ストッパ53と後ストッパ54が下方から進入可能に設けられている。これらの前ストッパ53と後ストッパ54は、それぞれシリンダ装置53A,54Aにより、上記溝内に進入する上位置と水平ガイド部51より下方の下位置との間で昇降駆動され、一方が上位置にあるときは他方が下位置に在るようになている。
【0005】
又、水平ガイド部52の上方位置には、シリンダ装置55Aにより駆動されるロッド状のプッシャ55が設けられている。該プッシャ55は、上下動そして前後動可能となっている。
【0006】
かかる従来装置では、図3において、連続供給されている先頭物品P1は後ストッパ54で停止されており、すでに搬送部60へ送り込まれた先行物品P0が搬送部60により前方へ搬送されている。
【0007】
次に、後ストッパ54が下位置へそして前ストッパ53が上位置へ移動する。すると、物品P1,P2・・・はその自重により傾斜ガイド部51を滑落して、先頭物品P1は上位置にある前ストッパ53の位置まで進みここで停止する。
【0008】
しかる後、プッシャ55が上記先頭物品P1と次物品P2の間に降下して入り込む。当接物品間には、紙面に直角な幅方向では局部的に隙間があり、プッシャはこの隙間に進入する。しかる後に、前ストッパ53が下位置へ降下すると共にプッシャ55が前方へ移動して先頭物品P1を搬送部60へ送り込む。このとき後ストッパ54は上位置にあって、次物品P2の進行を停止している。
【0009】
かくして、前ストッパ53と後ストッパ54とを交互に上位置そして下位置にもたらすと共に、前ストッパ53が下位置にあるときに、次物品P2を停止させつつ先頭物品P1のみを搬送部60へ受け渡す。したがって、供給部50では連らなって待機していた複数の物品は、搬送部60へ一つづつ受け渡され、次の物品との間に所定間隔をもって搬送され、次工程で必要な処理を受ける。
【特許文献1】該当なし
【発明の開示】
【発明が解決しようとする課題】
【0010】
しかしながら、上述の従来装置では、機能上の問題として、前ストッパと後ストッパが交互に上下にのみ作動するために物品の停止時間が生じて作業能率が良くないということが指摘される。又、物品の移動が間欠的なので、スピードが出せなくてこの点でも能率を上げられず、スピードを上げようとすると衝撃により物品同士を損傷することもある。
【0011】
本発明はこのような事情に鑑み、物品を連続的に円滑に供給して作業能率を高めることのできる物品搬送受渡し装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明に係る物品搬送受渡し装置は、複数の物品を連ねて前方へ供給する供給部と、該供給部の前端に連絡するように位置して物品を該供給部から一つづつ受け取り後続物品との間に所定間隔をもたらしながら前方へ搬送する搬送部と、上記供給部における先頭物品と後続物品の前進をそれぞれ交互に規制する前ストッパと後ストッパとを有し、これらのストッパの作動により物品間に上記所定間隔を形成する。
【0013】
かかる物品搬送受渡し装置において、本発明では、前ストッパと後ストッパは、上下方向で対応物品に対する係止位置と解除位置との間で移動可能、そして前後方向ではつながりをもつ前方範囲と後方範囲の間でそれぞれ前後移動可能で前進時に対応物品と係止し後退時に係止解除されるようになっており、前ストッパと後ストッパは、一方が係止状態のときは他方が解除状態となり、一方が解除状態のときは、他方が係止状態となることを特徴としている。
【0014】
このような構成の本発明では、前ストッパと後ストッパとは、停止期間がなく、いずれか一方が係止状態にあって前進するとき物品に係止して該物品を所定前進速度で案内し、この間、他方は解除状態にあると共に後退して次の物品との係止のための位置へ戻る。このように、両ストッパは、同時期に作動していて、いずれか一方のストッパが常に物品の係止前進案内を行っている。したがって、次の工程の搬送部への物品の受渡しは高能率に行われる。そして、他方のストッパが後続の物品の前進移動を規制しているので、上記一方のストッパにより受渡しされる物品との間に所定間隔が形成される。
【0015】
本発明では、上記構成に、物品を積極的に次工程の搬送部等に向け押し出すプッシャを追加的に設けることが可能である。該プッシャは、前ストッパの最前位置での係止状態から解除状態への移行時に、解除状態から押圧状態に入り、供給部における先頭物品を搬送部へ向け押し出すように設けられる。かくして、上記前のストッパと後ストッパ及び該プッシャの作動により物品間に所定間隔が形成される。
【0016】
このような本発明において、前ストッパ、後ストッパそしてプッシャは解除状態には物品よりも下方に位置して設けられており、上方へ移動して係止状態に入るようになっていることが好ましい。こうすることにより、物品より上方には、自由空間が大きく確保でき、物品の供給部への搬入等の作業が何の規制もなく行えることができ、又、両ストッパやプッシャの駆動のための装置も物品の上方にないので、これらの装置に付着した塵埃の落下、あるいは潤滑油の滴下等により物品を汚してしまうという虞れがなくなり、衛生的である。
【0017】
通常、物品は少なくとも部分的に丸味等をもった外形をなしていることが多く、供給部で連ねて位置する二つの当接物品同士間には上記丸味等の部分で空間が形成される。本発明では、前ストッパ、後ストッパそしてプッシャは、当接して連なる物品同士間に形成された上記空間に進入して物品と係止することが可能である。
【0018】
上記前ストッパ、後ストッパそしてプッシャは、いずれも二つのフィンガを有して物品との係止を可能としていることができ、きわめて単純な構成で安定した係止が可能となる。
【発明の効果】
【0019】
本発明は、以上のごとく、先頭物品の移動を停止することなく、前ストッパと後ストッパで物品を移動させながらその移動を交互に規制しながら搬送部へ送り込むようにしたので、物品の送り速度を高めることができて高能率化が図れ、又、物品の移動が連続的なので、物品に対して衝撃力をもたらさず物品の損傷という事態もなくなる。又、プッシャをも設けるならば、搬送部への受け渡しがより確実となる。さらに、本発明において、前ストッパ、後ストッパそしてプッシャを物品よりも下方側に配設することとするならば、物品の取り扱いが行いやすく、プッシャ等の上方の機構からの塵埃等の落下といった問題もなくなり、特に、物品が食品を収容するための容器の場合には、衛生的にも改善される。
【発明を実施するための最良の形態】
【0020】
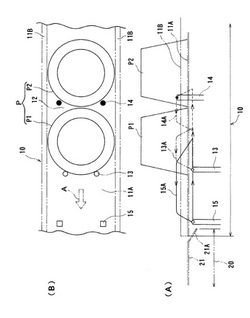
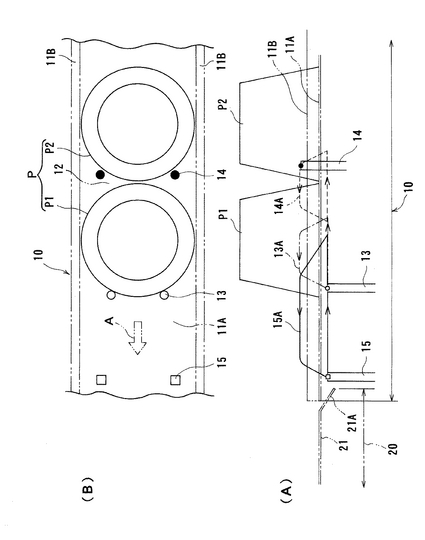
以下、添付図面の図1及び図2にもとづき、本発明の一実施形態を説明する。図1において、(A)は本実施形態装置を簡略化して示す概要正面図で、(B)はその平面図である。本実施形態装置では、搬送対象たる物品が円錐台形状のものである例を示す。
【0021】
図において、符号10は物品P(P1,P2,・・・)を連ねて供給している供給部であって、物品Pの搬送方向Aの前方位置に設けられた次工程の搬送部20に連絡している。図1において、上記供給部10と搬送部20は、図示の便宜上、物品の移動面が水平に表わされているが、多くの場合、供給部10における物品Pの前進を容易とするために、上記搬送方向Aの前方へ向け下方に傾斜している。したがって、物品Pは上記供給部10において、自重によって前方への力を受けている。
【0022】
供給部10は、物品Pの底面を支持し案内するガイド11Aに加え、物品Pを側方で案内する2本の側ガイド11Bが上記搬送方向Aに延びて設けられている。既述したように、供給部10、すなわちガイド11Aは上記搬送方向Aの前方へ向け下方に傾斜しているので、該ガイド11Aにより支持されている複数の物品Pは互いに当接して連なっている。本例における物品Pは平面形状が円形であるので、前後方向で当接する二つの物品P間には、側ガイド11B側に略三角形の空間12が形成される。物品は、図示のごとく平面形状が円形でなくとも、仮りに四角形でも、角部は丸味をもっていることが多く、その部分で、小さくとも同様な空間が形成される。
【0023】
上記ガイド11Aの下方には前ストッパ13、後ストッパ14、そしてプッシャ15が設けられている。前ストッパ13、後ストッパ14そしてプッシャ15は、いずれも、上下に延びる対をなす二つのフィンガを有し、この対をなすフィンガは互に側ガイド11Bの幅方向に離間して側ガイド11Bの内縁寄りに配設されている。前ストッパ13、後ストッパ14そしてプッシャ15の識別とそれらの位置を認識し易くするために、これらをそれぞれの上端で白丸印、黒丸印そして四角印を付してある。
【0024】
図に見られるように、上記搬送方向Aにて、最前にプッシャ15、次に前ストッパ13、そしてその後に後ストッパ14が配設されていて、いずれも、昇降しながら前後方向に移動可能で、上昇状態で前進、下降状態で後退するように駆動を受ける。それら移動の範囲は、図1(A)にて移動ループ13A,14A,15Aで示されているように、上下方向では前ストッパ13、後ストッパ14、そしてプッシャ15の上端のいずれもが同じ範囲で昇降し、最上昇時にはこれらの上端がガイド11Aの位置よりも上方に突出し、最下降時にはガイド11Aの位置よりも下方にある。前後方向での移動範囲に関しては、最前位置のプッシャ15が一番長い範囲をもち、これに比してその後方の前ストッパ13と後ストッパ14が比較的短い範囲で互に前後した範囲となっている。上記移動ループ13A,14A,15Aは、図1(A)に見られるように、略台形をなした軌跡を描いており、移動ループ15Aと移動ループ13Aが互にそれらの上辺で前後移動範囲が隣接してつながり、移動ループ13Aと移動ループ14Aがそれらの下辺で前後移動範囲が隣接してつながっている。
【0025】
上記移動ループ15Aと移動ループ13Aは、上述のごとくそれらの上辺が前後移動範囲が隣接してつながっているということは、下辺同士は重なりをもっているということであり、これは前ストッパ13が物品の前部に作用するのに対し、プッシャ15は物品の後部に作用することにもとづくものである。
【0026】
上記前ストッパ13、後ストッパ14そしてプッシャ15は、それらの上端が移動ループ13A,14Aそして15Aを停止することなく連続的に移動するが、その移動が一巡するのに要する時間は同じである。すなわち、プッシャ15が前後ストッパ13,14と同一時間でこれらよりも長い距離だけ移動するということは、移動速度がそれだけ速いということである。移動中の前ストッパ13、後ストッパ14そしてプッシャ15のそれぞれの上端の位置関係は、例えば、図1(A)に示されているように、前ストッパ13の上端が最前進位置で下降したとき、後ストッパ14の上端は、最後退位から上昇して水平前進に入りきった位置にあり、又、プッシャ15の上端は、前ストッパ13と同様に、最前進位置で下降した位置にある。
【0027】
上記前ストッパ13と後ストッパ14とは、後ストッパ14が係止状態から解除状態に、そして前ストッパ13が解除状態から係止状態に動作するときに、両ストッパ13,14の位置関係が前後方向で互に若干の重複範囲をもつので、それらの干渉を避けるために、本実施形態では、図1(B)に見られるようにガイドレール11の幅方向で互にずれた位置に設けられている。
【0028】
このような、供給部10の前方には、次工程のための搬送部20が設けられている。この搬送部20はコンベア(図示せず)を有し、該コンベアに平行して物品を案内支持するガイドレール21が設けられている。該ガイドレール21は、物品の引取りが円滑に行われるように、その後端21Aが下方に傾斜して供給部10のガイド11Aの前端の下にもぐり込んでいる。
【0029】
かかる本実施形態装置では、供給部10から搬送部20への物品の受渡しは次の要領で行われる。この受渡しの原理を図2にもとづき説明する。この図2では供給部と搬送部が前方に向け下方に傾斜している様子が示されている。なお図2(A)〜(F)の各図は図1の(A),(B)に対応する図を一つにまとめて示している。図2は(A)〜(F)に見られるように、順次動作が進行するが、図2(A)における状態が図1の状態と一致している。
【0030】
(1) 図2(A)において、前方に向け下方に傾斜せる供給部10のガイド11Aには、複数の物品P(P1,P2・・・)が案内支持されており、上昇位置にあって係止状態の後ストッパ14によって、先頭の物品P1がそれ以上の前方への滑動が阻止されているので、後続の物品P2,P3・・・は、それらの自重によって前方に押されて互に前後で当接して連なった状態にある。一方、前ストッパ13とプッシャ15は下降状態でそれらの最前位置にあり、物品とは係止していない解除状態にある。なお、先方の物品P0は、プッシャ15により、すでに搬送部20へ受渡しされ、そのコンベアにより前方へ搬送されつつある。
【0031】
(2) 後ストッパ14は、図2(A)の状態から図2(B)の状態の位置へ前進すると、物品P1,P2,P3・・・もその分の距離だけ前進移動する。係止状態の後ストッパ14がほぼ最前進位置にくると、図2(C),(D)に示されるように後ストッパ14は前進しながら下降し解除状態に入る。一方、前ストッパ13とプッシャ15は、図2(B)の状態では下降した解除状態にあり後退中であり、図2(C)で最後退位置にくる。図2(D)で上記後ストッパ14が降下するときには、前ストッパ13は上昇して係止状態に入り、物品P1の次の物品P2の前部を係止し、該物品P2の前進を規制する。これと同時に、プッシャ15は、その上昇により、先頭物品P1の後方の押圧位置にくる。前ストッパ13とプッシャ15は共に前方へ移動するので、物品P2は移動を規制されつつも前ストッパ13の速度で前進し、一方、先頭物品P1はそれより速いプッシャ15により前方へ押し出される。
【0032】
(3) 前ストッパ13の前進、プッシャ15の前進が進行すると、図2(E),(F)のごとく、前ストッパ13が係止している物品P2は図2(A)における物品P1の位置にまで達し、一方、プッシャ15により押される先頭物品P1は、図2(A)における物品P0の位置、すなわち、搬送部20へ受け渡される。その際、前ストッパ13に比し、プッシャ15は大きな速度で前進するので、物品P2に対し物品P1は前進距離が大きく、両者の間に所定の距離が形成される。この前ストッパ13とプッシャ15が前進している間に、解除状態にある後ストッパ14は最後退位置にくる。
【0033】
(4) しかる後、前ストッパ13とプッシャ15は下降して解除状態、後ストッパ14は上昇して係止状態に入り、それぞれ図2(A)の位置へ戻り、再び上記(1)〜(3)のサイクルを繰返し、後続の物品を絶え間なく次々と供給部から搬送部へ受渡し、物品間に所定間隔を形成する。
【0034】
本実施形態では、搬送対象たる物品として、種々の物品が考えられるが、その一例として容器が挙げられる。該容器はその形状も種々あり、いずれもその対象となる。又、容器は内容物の充填そしてシールの済んでいるもの、済んでいないものもあり、さらには、正立しているものそして倒立しているものもある。容器には、開口部周囲にフランジが形成されていることが多く、この場合には、供給部におけるガイドはレール状をなし上記容器のフランジを下方から支えて、容器が吊下するようになる。
【0035】
したがって、かかるフランジ付容器の場合は、前ストッパ、後ストッパそしてプッシャは、それらの上端が容器を係止あるいは押し出すために上方位置にくるとき、この上方位置はガイドよりも上方にくる必要もなく、ガイドの下方で容器本体を係止あるいは押し出すことが可能となる。その際、これらの前ストッパ、後ストッパそしてプッシャは後退するためにこれらの上端が下方位置にくるとき、この下方位置は単にガイドよりも下方では十分でなく、容器の底面よりも下方にくることが必要となる。
【0036】
本発明は、図示した実施形態には限定されない。例えば、供給部は図2のごとく前方に向け下方に傾斜しなくとも、何らかの搬送力をもっていれば、水平でも上方に傾斜していてもよい。又、図示した例のごとく、下方に傾斜している場合、プッシャがなくとも先頭容器は搬送部へ自重により移動できるので、プッシャは必須ではない。この場合、物品の滑動を容易とするために、ガイドは容器との間の摩擦の小さい材料であること、あるいは表面処理されていることが好ましい。さらには、前ストッパ、後ストッパそしてプッシャは少なくともそれらの一つが物品よりも上方に位置して設けられることも可能であるし、又、その形態もフィンガでなくともよい。特に、物品が丸い平面形状をなしておらず、完全な直方体形状であるときには、フィンガが入り込む空間が物品同士間に形成されないので、この場合には、物品を側方から挟持する形態とすることも可能である。ただ、物品が上記のごとくのフランジ付容器である場合は、前後する容器はそれらのフランジ同士で突き当るので、容器本体同士間には必ず空間が形成され、たとえ容器の平面形状が四角形でも、上記空間にフィンガが入る余裕がある。
【図面の簡単な説明】
【0037】
【図1】本発明の一実施形態装置の概要構成を示し、(A)は正面図、(B)は平面図である。
【図2】図1装置の作動をその順を追って(A)〜(F)に示す図である。
【図3】従来装置の概要構成を示す正面図である。
【符号の説明】
【0038】
10 供給部
13 前ストッパ
14 後ストッパ
15 プッシャ
20 搬送部
P(P1,P2,・・・) 物品
【技術分野】
【0001】
本発明は、供給部から供給される物品を、後続の物品との間に所定間隔を保ちながら搬送部へ受渡す物品搬送受渡し装置に関する。
【背景技術】
【0002】
物品が複数の工程を経て製品とされる際、複数の物品は供給部で連ねられている状態から、搬送部へ受け渡される際に、次工程で必要とされる物品間間隔が形成される。かかる供給部そして搬送部を備える装置として、添付図面の図3に示される装置が知られている(特許文献、非特許文献発見できず)。
【0003】
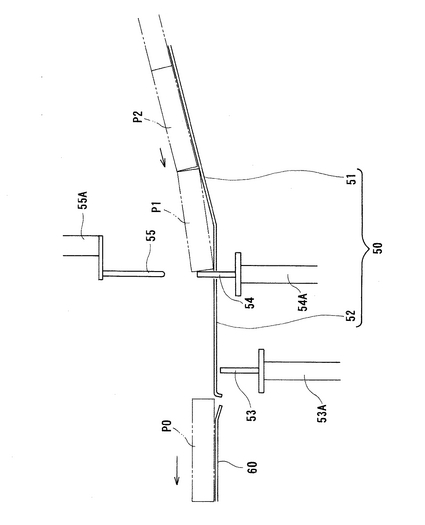
図3装置では、供給部50は物品Pをその自重によって前方(図にて左方)へ自動供給する傾斜ガイド部51と、該傾斜ガイド部51から前方へ延びる水平ガイド部52とを有し、該水平ガイド部52が搬送部60へ連絡するようになっている。
【0004】
上記水平ガイド部52には、その幅方向(紙面に対し直角方向)の中間部に、前後に延びる溝が形成されていて、該溝へロッド状の前ストッパ53と後ストッパ54が下方から進入可能に設けられている。これらの前ストッパ53と後ストッパ54は、それぞれシリンダ装置53A,54Aにより、上記溝内に進入する上位置と水平ガイド部51より下方の下位置との間で昇降駆動され、一方が上位置にあるときは他方が下位置に在るようになている。
【0005】
又、水平ガイド部52の上方位置には、シリンダ装置55Aにより駆動されるロッド状のプッシャ55が設けられている。該プッシャ55は、上下動そして前後動可能となっている。
【0006】
かかる従来装置では、図3において、連続供給されている先頭物品P1は後ストッパ54で停止されており、すでに搬送部60へ送り込まれた先行物品P0が搬送部60により前方へ搬送されている。
【0007】
次に、後ストッパ54が下位置へそして前ストッパ53が上位置へ移動する。すると、物品P1,P2・・・はその自重により傾斜ガイド部51を滑落して、先頭物品P1は上位置にある前ストッパ53の位置まで進みここで停止する。
【0008】
しかる後、プッシャ55が上記先頭物品P1と次物品P2の間に降下して入り込む。当接物品間には、紙面に直角な幅方向では局部的に隙間があり、プッシャはこの隙間に進入する。しかる後に、前ストッパ53が下位置へ降下すると共にプッシャ55が前方へ移動して先頭物品P1を搬送部60へ送り込む。このとき後ストッパ54は上位置にあって、次物品P2の進行を停止している。
【0009】
かくして、前ストッパ53と後ストッパ54とを交互に上位置そして下位置にもたらすと共に、前ストッパ53が下位置にあるときに、次物品P2を停止させつつ先頭物品P1のみを搬送部60へ受け渡す。したがって、供給部50では連らなって待機していた複数の物品は、搬送部60へ一つづつ受け渡され、次の物品との間に所定間隔をもって搬送され、次工程で必要な処理を受ける。
【特許文献1】該当なし
【発明の開示】
【発明が解決しようとする課題】
【0010】
しかしながら、上述の従来装置では、機能上の問題として、前ストッパと後ストッパが交互に上下にのみ作動するために物品の停止時間が生じて作業能率が良くないということが指摘される。又、物品の移動が間欠的なので、スピードが出せなくてこの点でも能率を上げられず、スピードを上げようとすると衝撃により物品同士を損傷することもある。
【0011】
本発明はこのような事情に鑑み、物品を連続的に円滑に供給して作業能率を高めることのできる物品搬送受渡し装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明に係る物品搬送受渡し装置は、複数の物品を連ねて前方へ供給する供給部と、該供給部の前端に連絡するように位置して物品を該供給部から一つづつ受け取り後続物品との間に所定間隔をもたらしながら前方へ搬送する搬送部と、上記供給部における先頭物品と後続物品の前進をそれぞれ交互に規制する前ストッパと後ストッパとを有し、これらのストッパの作動により物品間に上記所定間隔を形成する。
【0013】
かかる物品搬送受渡し装置において、本発明では、前ストッパと後ストッパは、上下方向で対応物品に対する係止位置と解除位置との間で移動可能、そして前後方向ではつながりをもつ前方範囲と後方範囲の間でそれぞれ前後移動可能で前進時に対応物品と係止し後退時に係止解除されるようになっており、前ストッパと後ストッパは、一方が係止状態のときは他方が解除状態となり、一方が解除状態のときは、他方が係止状態となることを特徴としている。
【0014】
このような構成の本発明では、前ストッパと後ストッパとは、停止期間がなく、いずれか一方が係止状態にあって前進するとき物品に係止して該物品を所定前進速度で案内し、この間、他方は解除状態にあると共に後退して次の物品との係止のための位置へ戻る。このように、両ストッパは、同時期に作動していて、いずれか一方のストッパが常に物品の係止前進案内を行っている。したがって、次の工程の搬送部への物品の受渡しは高能率に行われる。そして、他方のストッパが後続の物品の前進移動を規制しているので、上記一方のストッパにより受渡しされる物品との間に所定間隔が形成される。
【0015】
本発明では、上記構成に、物品を積極的に次工程の搬送部等に向け押し出すプッシャを追加的に設けることが可能である。該プッシャは、前ストッパの最前位置での係止状態から解除状態への移行時に、解除状態から押圧状態に入り、供給部における先頭物品を搬送部へ向け押し出すように設けられる。かくして、上記前のストッパと後ストッパ及び該プッシャの作動により物品間に所定間隔が形成される。
【0016】
このような本発明において、前ストッパ、後ストッパそしてプッシャは解除状態には物品よりも下方に位置して設けられており、上方へ移動して係止状態に入るようになっていることが好ましい。こうすることにより、物品より上方には、自由空間が大きく確保でき、物品の供給部への搬入等の作業が何の規制もなく行えることができ、又、両ストッパやプッシャの駆動のための装置も物品の上方にないので、これらの装置に付着した塵埃の落下、あるいは潤滑油の滴下等により物品を汚してしまうという虞れがなくなり、衛生的である。
【0017】
通常、物品は少なくとも部分的に丸味等をもった外形をなしていることが多く、供給部で連ねて位置する二つの当接物品同士間には上記丸味等の部分で空間が形成される。本発明では、前ストッパ、後ストッパそしてプッシャは、当接して連なる物品同士間に形成された上記空間に進入して物品と係止することが可能である。
【0018】
上記前ストッパ、後ストッパそしてプッシャは、いずれも二つのフィンガを有して物品との係止を可能としていることができ、きわめて単純な構成で安定した係止が可能となる。
【発明の効果】
【0019】
本発明は、以上のごとく、先頭物品の移動を停止することなく、前ストッパと後ストッパで物品を移動させながらその移動を交互に規制しながら搬送部へ送り込むようにしたので、物品の送り速度を高めることができて高能率化が図れ、又、物品の移動が連続的なので、物品に対して衝撃力をもたらさず物品の損傷という事態もなくなる。又、プッシャをも設けるならば、搬送部への受け渡しがより確実となる。さらに、本発明において、前ストッパ、後ストッパそしてプッシャを物品よりも下方側に配設することとするならば、物品の取り扱いが行いやすく、プッシャ等の上方の機構からの塵埃等の落下といった問題もなくなり、特に、物品が食品を収容するための容器の場合には、衛生的にも改善される。
【発明を実施するための最良の形態】
【0020】
以下、添付図面の図1及び図2にもとづき、本発明の一実施形態を説明する。図1において、(A)は本実施形態装置を簡略化して示す概要正面図で、(B)はその平面図である。本実施形態装置では、搬送対象たる物品が円錐台形状のものである例を示す。
【0021】
図において、符号10は物品P(P1,P2,・・・)を連ねて供給している供給部であって、物品Pの搬送方向Aの前方位置に設けられた次工程の搬送部20に連絡している。図1において、上記供給部10と搬送部20は、図示の便宜上、物品の移動面が水平に表わされているが、多くの場合、供給部10における物品Pの前進を容易とするために、上記搬送方向Aの前方へ向け下方に傾斜している。したがって、物品Pは上記供給部10において、自重によって前方への力を受けている。
【0022】
供給部10は、物品Pの底面を支持し案内するガイド11Aに加え、物品Pを側方で案内する2本の側ガイド11Bが上記搬送方向Aに延びて設けられている。既述したように、供給部10、すなわちガイド11Aは上記搬送方向Aの前方へ向け下方に傾斜しているので、該ガイド11Aにより支持されている複数の物品Pは互いに当接して連なっている。本例における物品Pは平面形状が円形であるので、前後方向で当接する二つの物品P間には、側ガイド11B側に略三角形の空間12が形成される。物品は、図示のごとく平面形状が円形でなくとも、仮りに四角形でも、角部は丸味をもっていることが多く、その部分で、小さくとも同様な空間が形成される。
【0023】
上記ガイド11Aの下方には前ストッパ13、後ストッパ14、そしてプッシャ15が設けられている。前ストッパ13、後ストッパ14そしてプッシャ15は、いずれも、上下に延びる対をなす二つのフィンガを有し、この対をなすフィンガは互に側ガイド11Bの幅方向に離間して側ガイド11Bの内縁寄りに配設されている。前ストッパ13、後ストッパ14そしてプッシャ15の識別とそれらの位置を認識し易くするために、これらをそれぞれの上端で白丸印、黒丸印そして四角印を付してある。
【0024】
図に見られるように、上記搬送方向Aにて、最前にプッシャ15、次に前ストッパ13、そしてその後に後ストッパ14が配設されていて、いずれも、昇降しながら前後方向に移動可能で、上昇状態で前進、下降状態で後退するように駆動を受ける。それら移動の範囲は、図1(A)にて移動ループ13A,14A,15Aで示されているように、上下方向では前ストッパ13、後ストッパ14、そしてプッシャ15の上端のいずれもが同じ範囲で昇降し、最上昇時にはこれらの上端がガイド11Aの位置よりも上方に突出し、最下降時にはガイド11Aの位置よりも下方にある。前後方向での移動範囲に関しては、最前位置のプッシャ15が一番長い範囲をもち、これに比してその後方の前ストッパ13と後ストッパ14が比較的短い範囲で互に前後した範囲となっている。上記移動ループ13A,14A,15Aは、図1(A)に見られるように、略台形をなした軌跡を描いており、移動ループ15Aと移動ループ13Aが互にそれらの上辺で前後移動範囲が隣接してつながり、移動ループ13Aと移動ループ14Aがそれらの下辺で前後移動範囲が隣接してつながっている。
【0025】
上記移動ループ15Aと移動ループ13Aは、上述のごとくそれらの上辺が前後移動範囲が隣接してつながっているということは、下辺同士は重なりをもっているということであり、これは前ストッパ13が物品の前部に作用するのに対し、プッシャ15は物品の後部に作用することにもとづくものである。
【0026】
上記前ストッパ13、後ストッパ14そしてプッシャ15は、それらの上端が移動ループ13A,14Aそして15Aを停止することなく連続的に移動するが、その移動が一巡するのに要する時間は同じである。すなわち、プッシャ15が前後ストッパ13,14と同一時間でこれらよりも長い距離だけ移動するということは、移動速度がそれだけ速いということである。移動中の前ストッパ13、後ストッパ14そしてプッシャ15のそれぞれの上端の位置関係は、例えば、図1(A)に示されているように、前ストッパ13の上端が最前進位置で下降したとき、後ストッパ14の上端は、最後退位から上昇して水平前進に入りきった位置にあり、又、プッシャ15の上端は、前ストッパ13と同様に、最前進位置で下降した位置にある。
【0027】
上記前ストッパ13と後ストッパ14とは、後ストッパ14が係止状態から解除状態に、そして前ストッパ13が解除状態から係止状態に動作するときに、両ストッパ13,14の位置関係が前後方向で互に若干の重複範囲をもつので、それらの干渉を避けるために、本実施形態では、図1(B)に見られるようにガイドレール11の幅方向で互にずれた位置に設けられている。
【0028】
このような、供給部10の前方には、次工程のための搬送部20が設けられている。この搬送部20はコンベア(図示せず)を有し、該コンベアに平行して物品を案内支持するガイドレール21が設けられている。該ガイドレール21は、物品の引取りが円滑に行われるように、その後端21Aが下方に傾斜して供給部10のガイド11Aの前端の下にもぐり込んでいる。
【0029】
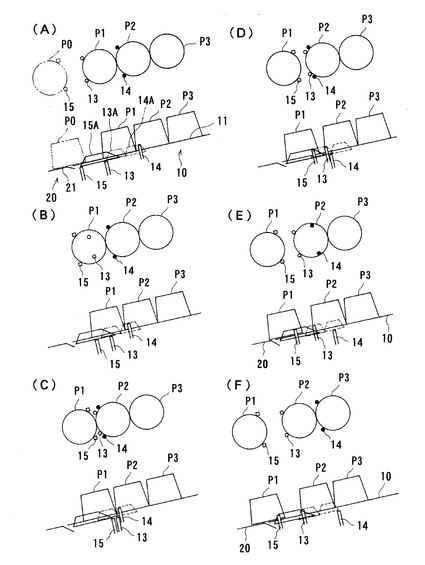
かかる本実施形態装置では、供給部10から搬送部20への物品の受渡しは次の要領で行われる。この受渡しの原理を図2にもとづき説明する。この図2では供給部と搬送部が前方に向け下方に傾斜している様子が示されている。なお図2(A)〜(F)の各図は図1の(A),(B)に対応する図を一つにまとめて示している。図2は(A)〜(F)に見られるように、順次動作が進行するが、図2(A)における状態が図1の状態と一致している。
【0030】
(1) 図2(A)において、前方に向け下方に傾斜せる供給部10のガイド11Aには、複数の物品P(P1,P2・・・)が案内支持されており、上昇位置にあって係止状態の後ストッパ14によって、先頭の物品P1がそれ以上の前方への滑動が阻止されているので、後続の物品P2,P3・・・は、それらの自重によって前方に押されて互に前後で当接して連なった状態にある。一方、前ストッパ13とプッシャ15は下降状態でそれらの最前位置にあり、物品とは係止していない解除状態にある。なお、先方の物品P0は、プッシャ15により、すでに搬送部20へ受渡しされ、そのコンベアにより前方へ搬送されつつある。
【0031】
(2) 後ストッパ14は、図2(A)の状態から図2(B)の状態の位置へ前進すると、物品P1,P2,P3・・・もその分の距離だけ前進移動する。係止状態の後ストッパ14がほぼ最前進位置にくると、図2(C),(D)に示されるように後ストッパ14は前進しながら下降し解除状態に入る。一方、前ストッパ13とプッシャ15は、図2(B)の状態では下降した解除状態にあり後退中であり、図2(C)で最後退位置にくる。図2(D)で上記後ストッパ14が降下するときには、前ストッパ13は上昇して係止状態に入り、物品P1の次の物品P2の前部を係止し、該物品P2の前進を規制する。これと同時に、プッシャ15は、その上昇により、先頭物品P1の後方の押圧位置にくる。前ストッパ13とプッシャ15は共に前方へ移動するので、物品P2は移動を規制されつつも前ストッパ13の速度で前進し、一方、先頭物品P1はそれより速いプッシャ15により前方へ押し出される。
【0032】
(3) 前ストッパ13の前進、プッシャ15の前進が進行すると、図2(E),(F)のごとく、前ストッパ13が係止している物品P2は図2(A)における物品P1の位置にまで達し、一方、プッシャ15により押される先頭物品P1は、図2(A)における物品P0の位置、すなわち、搬送部20へ受け渡される。その際、前ストッパ13に比し、プッシャ15は大きな速度で前進するので、物品P2に対し物品P1は前進距離が大きく、両者の間に所定の距離が形成される。この前ストッパ13とプッシャ15が前進している間に、解除状態にある後ストッパ14は最後退位置にくる。
【0033】
(4) しかる後、前ストッパ13とプッシャ15は下降して解除状態、後ストッパ14は上昇して係止状態に入り、それぞれ図2(A)の位置へ戻り、再び上記(1)〜(3)のサイクルを繰返し、後続の物品を絶え間なく次々と供給部から搬送部へ受渡し、物品間に所定間隔を形成する。
【0034】
本実施形態では、搬送対象たる物品として、種々の物品が考えられるが、その一例として容器が挙げられる。該容器はその形状も種々あり、いずれもその対象となる。又、容器は内容物の充填そしてシールの済んでいるもの、済んでいないものもあり、さらには、正立しているものそして倒立しているものもある。容器には、開口部周囲にフランジが形成されていることが多く、この場合には、供給部におけるガイドはレール状をなし上記容器のフランジを下方から支えて、容器が吊下するようになる。
【0035】
したがって、かかるフランジ付容器の場合は、前ストッパ、後ストッパそしてプッシャは、それらの上端が容器を係止あるいは押し出すために上方位置にくるとき、この上方位置はガイドよりも上方にくる必要もなく、ガイドの下方で容器本体を係止あるいは押し出すことが可能となる。その際、これらの前ストッパ、後ストッパそしてプッシャは後退するためにこれらの上端が下方位置にくるとき、この下方位置は単にガイドよりも下方では十分でなく、容器の底面よりも下方にくることが必要となる。
【0036】
本発明は、図示した実施形態には限定されない。例えば、供給部は図2のごとく前方に向け下方に傾斜しなくとも、何らかの搬送力をもっていれば、水平でも上方に傾斜していてもよい。又、図示した例のごとく、下方に傾斜している場合、プッシャがなくとも先頭容器は搬送部へ自重により移動できるので、プッシャは必須ではない。この場合、物品の滑動を容易とするために、ガイドは容器との間の摩擦の小さい材料であること、あるいは表面処理されていることが好ましい。さらには、前ストッパ、後ストッパそしてプッシャは少なくともそれらの一つが物品よりも上方に位置して設けられることも可能であるし、又、その形態もフィンガでなくともよい。特に、物品が丸い平面形状をなしておらず、完全な直方体形状であるときには、フィンガが入り込む空間が物品同士間に形成されないので、この場合には、物品を側方から挟持する形態とすることも可能である。ただ、物品が上記のごとくのフランジ付容器である場合は、前後する容器はそれらのフランジ同士で突き当るので、容器本体同士間には必ず空間が形成され、たとえ容器の平面形状が四角形でも、上記空間にフィンガが入る余裕がある。
【図面の簡単な説明】
【0037】
【図1】本発明の一実施形態装置の概要構成を示し、(A)は正面図、(B)は平面図である。
【図2】図1装置の作動をその順を追って(A)〜(F)に示す図である。
【図3】従来装置の概要構成を示す正面図である。
【符号の説明】
【0038】
10 供給部
13 前ストッパ
14 後ストッパ
15 プッシャ
20 搬送部
P(P1,P2,・・・) 物品
【特許請求の範囲】
【請求項1】
複数の物品を連ねて前方へ供給する供給部と、該供給部の前端に連絡するように位置して物品を該供給部から一つづつ受け取り後続物品との間に所定間隔をもたらしながら前方へ搬送する搬送部と、上記供給部における先頭物品と後続物品の前進をそれぞれ交互に規制する前ストッパと後ストッパとを有し、これらのストッパの作動により物品間に上記所定間隔を形成する物品搬送受渡し装置において、前ストッパと後ストッパは、上下方向で対応物品に対する係止位置と解除位置との間で移動可能、そして前後方向ではつながりをもつ前方範囲と後方範囲の間でそれぞれ前後移動可能で前進時に対応物品と係止し後退時に係止解除されるようになっており、前ストッパと後ストッパは、一方が係止状態のときは他方が解除状態となり、一方が解除状態のときは、他方が係止状態となることを特徴とする物品搬送受渡し装置。
【請求項2】
複数の物品を連ねて前方へ供給する供給部と、該供給部の前端に連絡するように位置して物品を該供給部から一つづつ受け取り後続物品との間に所定間隔をもたらしながら前方へ搬送する搬送部と、上記供給部における先頭物品と後続物品の前進をそれぞれ交互に規制する前ストッパと後ストッパと、該先頭物品を搬送部へ向け前進せしめるプッシャとを有し、これらのストッパ及びプッシャの作動により物品間に上記所定間隔を形成する物品搬送受渡し装置において、前ストッパと後ストッパは、上下方向で対応物品に対する係止位置と解除位置との間で移動可能、そして前後方向ではつながりをもつ前方範囲と後方範囲の間でそれぞれ前後移動可能で前進時に対応物品と係止し後退時に係止解除されるようになっており、前ストッパと後ストッパは、一方が係止状態のときは他方が解除状態となり、一方が解除状態のときは、他方が係止状態となるように設定され、プッシャは、前ストッパの最前位置での係止状態から解除状態への移行時に、解除状態から押圧状態に入り物品を搬送部へ向け押し出すことを特徴とする物品搬送受渡し装置。
【請求項3】
前ストッパ、後ストッパそしてプッシャは解除状態には物品よりも下方に位置しており、上方へ移動して係止状態に入るようになっていることとする請求項1又は請求項2に記載の物品搬送受渡し装置。
【請求項4】
前ストッパ、後ストッパそしてプッシャは、当接して連なる物品同士間に形成された空間に進入して物品との係止を可能とする請求項2又は請求項3に記載の物品搬送受渡し装置。
【請求項5】
前ストッパ、後ストッパそしてプッシャは、いずれも二つのフィンガを有して物品との係止を可能としていることとする請求項2ないし請求項3のうちの一つに記載の物品搬送受渡し装置。
【請求項1】
複数の物品を連ねて前方へ供給する供給部と、該供給部の前端に連絡するように位置して物品を該供給部から一つづつ受け取り後続物品との間に所定間隔をもたらしながら前方へ搬送する搬送部と、上記供給部における先頭物品と後続物品の前進をそれぞれ交互に規制する前ストッパと後ストッパとを有し、これらのストッパの作動により物品間に上記所定間隔を形成する物品搬送受渡し装置において、前ストッパと後ストッパは、上下方向で対応物品に対する係止位置と解除位置との間で移動可能、そして前後方向ではつながりをもつ前方範囲と後方範囲の間でそれぞれ前後移動可能で前進時に対応物品と係止し後退時に係止解除されるようになっており、前ストッパと後ストッパは、一方が係止状態のときは他方が解除状態となり、一方が解除状態のときは、他方が係止状態となることを特徴とする物品搬送受渡し装置。
【請求項2】
複数の物品を連ねて前方へ供給する供給部と、該供給部の前端に連絡するように位置して物品を該供給部から一つづつ受け取り後続物品との間に所定間隔をもたらしながら前方へ搬送する搬送部と、上記供給部における先頭物品と後続物品の前進をそれぞれ交互に規制する前ストッパと後ストッパと、該先頭物品を搬送部へ向け前進せしめるプッシャとを有し、これらのストッパ及びプッシャの作動により物品間に上記所定間隔を形成する物品搬送受渡し装置において、前ストッパと後ストッパは、上下方向で対応物品に対する係止位置と解除位置との間で移動可能、そして前後方向ではつながりをもつ前方範囲と後方範囲の間でそれぞれ前後移動可能で前進時に対応物品と係止し後退時に係止解除されるようになっており、前ストッパと後ストッパは、一方が係止状態のときは他方が解除状態となり、一方が解除状態のときは、他方が係止状態となるように設定され、プッシャは、前ストッパの最前位置での係止状態から解除状態への移行時に、解除状態から押圧状態に入り物品を搬送部へ向け押し出すことを特徴とする物品搬送受渡し装置。
【請求項3】
前ストッパ、後ストッパそしてプッシャは解除状態には物品よりも下方に位置しており、上方へ移動して係止状態に入るようになっていることとする請求項1又は請求項2に記載の物品搬送受渡し装置。
【請求項4】
前ストッパ、後ストッパそしてプッシャは、当接して連なる物品同士間に形成された空間に進入して物品との係止を可能とする請求項2又は請求項3に記載の物品搬送受渡し装置。
【請求項5】
前ストッパ、後ストッパそしてプッシャは、いずれも二つのフィンガを有して物品との係止を可能としていることとする請求項2ないし請求項3のうちの一つに記載の物品搬送受渡し装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2006−131333(P2006−131333A)
【公開日】平成18年5月25日(2006.5.25)
【国際特許分類】
【出願番号】特願2004−321748(P2004−321748)
【出願日】平成16年11月5日(2004.11.5)
【出願人】(000226976)日清食品株式会社 (127)
【出願人】(393027121)株式会社ファブリカトヤマ (27)
【Fターム(参考)】
【公開日】平成18年5月25日(2006.5.25)
【国際特許分類】
【出願日】平成16年11月5日(2004.11.5)
【出願人】(000226976)日清食品株式会社 (127)
【出願人】(393027121)株式会社ファブリカトヤマ (27)
【Fターム(参考)】
[ Back to top ]