
物品搬送装置及び反射形センサー
【課題】物品の位置や姿勢を正確に判定して物品を円滑に分岐搬送路に移載することが可能な物品搬送装置を提供する。
【解決手段】分岐部2を有するローラコンベア装置であり、分岐部2の中心に反射形センサー12の本体部25が設けられている。反射形センサー12には、4個の発光素子と、1個の受光素子及が設けられている。発光素子の発光のタイミングと、受光素子からの信号発信のタイミングを考慮して、今回のON,OFF信号がいずれの発光素子の発光に起因するものであるかを判別し、中心認識出力を出力する。中心認識出力が全てONとなる状態を呈すれば、パレットの中心と、分岐部2の中心が一致している。
【解決手段】分岐部2を有するローラコンベア装置であり、分岐部2の中心に反射形センサー12の本体部25が設けられている。反射形センサー12には、4個の発光素子と、1個の受光素子及が設けられている。発光素子の発光のタイミングと、受光素子からの信号発信のタイミングを考慮して、今回のON,OFF信号がいずれの発光素子の発光に起因するものであるかを判別し、中心認識出力を出力する。中心認識出力が全てONとなる状態を呈すれば、パレットの中心と、分岐部2の中心が一致している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ローラコンベア装置やベルトコンベア装置等の物品搬送装置に関するものである。また本発明は物品の位置確認や位置決めを行う用途に適する反射形センサーに関するものである。
本発明の物品搬送装置及び反射形センサーは、分岐部を有して物品を主搬送路から分岐搬送路等に受け渡す構造を備えた物品搬送装置に適用することができるものである。
【背景技術】
【0002】
組み立て工場や、宅配便の仕分け場、あるいは収納倉庫等では、ローラコンベア等の物品搬送装置が縦横に巡らされ、物品が所望の位置に自動搬送される。
例えば自動車の組み立て工場では、車台を組み立てるラインや、エンジンを組み立てるラインに物品搬送装置が配置されている。そしてエンジンを車台に組み込むラインでは、例えばエンジン組み立てラインを分岐して車台組み立てラインの近傍に至る物品搬送装置が設けられている。
【0003】
宅配便の仕分け場では、多数の分岐部を有して網の目の如く細かく分岐された物品搬送網が構築されており、末端の分岐搬送路は、荷物の行き先に応じて決められた荷物置場に至っている。
【0004】
また立体駐車場や立体倉庫等の収納倉庫においても、多数の分岐部を有して網の目の如く細かく分岐された物品搬送網が構築されており、末端の分岐搬送路は、定められた住所の物品置場に至っている。
【0005】
この様に近年の物品搬送装置は、物品をただ単に直線的に搬送するだけではなく、分岐搬送路を設けて物品を複数の目的地に個別に搬送する機能を備えたものが多い。
即ち近年の物品搬送装置には、主搬送路に対して複数の分岐搬送路が設けられていて搬送路が枝分かれしており、分岐部で物品を移載して目的の場所に物品を搬送する構成を備えたものがある。
【0006】
この種の物品搬送装置では、例えば特許文献1に開示された様な移載装置が採用され、当該移載装置が主搬送路と分岐搬送路との分岐部に設置される。そして分岐搬送路に移載すべき物品が分岐部に至ると、分岐部上に物品を停止し、移載装置を起動して物品を主搬送方向に対して垂直方向に移動させ、物品を主搬送路から分岐搬送路に載せ変える。
【0007】
また分岐部上に搬送物が運ばれて来たか否かは、物品搬送装置に設けたセンサーによって判定する。例えば分岐部の近傍に反射形の光電センサーを設け、光電センサーから分岐部に向かって光を照射する。もし分岐部上に物品が存在するならば光電センサーから照射された光が反射して光電センサーに戻るので、この反射光の有無をもって分岐部上に物品が有るか否かを判定することができる。
【0008】
また分岐部上の物品の有無を検知する反射形センサーとして特許文献2に開示された構成のものが知られている。
特許文献2に開示された反射形センサーは、一つの発光素子と、4個の受光素子とによって構成されている。そして従来技術の反射形センサーでは、4個の受光素子は、いずれも一つの発光素子の周囲に配置されている。また各受光素子と中央の発光素子のとの距離はいずれも異なっている。
【0009】
従来技術の反射形センサーでは、中央の発光素子を発光させて物品に照射し、その反射光を周囲の4個の受光素子で受光する。そして2個以上の受光素子が共に反射光を検知しした場合に限って物品の存在を肯定することとし、受光素子等の誤動作領域をカバーしている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平6−312832号公報
【特許文献2】特開2008−103969号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
上記した様に、物品を主搬送路から分岐搬送路に移載する場合は、物品を分岐部で停止し、分岐部に設置した移載装置を駆動して物品を分岐搬送路に排出する。
即ち図9に示すように、物品1を分岐部2の中央で停止させ、分岐部2に設けられた移載装置(図示せず)を駆動して物品1を図面右側に移動させ、右側の分岐搬送路3に物品1を排出する。
【0012】
しかしながら、例えば図12の様に主搬送路5が矢印の様に図面下側から図面上側に向かって物品1を搬送するものと仮定したとき、物品1が、分岐部2の中央に至るまでの途中で停止してしまうと、移載装置(図示せず)を駆動して物品1を図面右側に移動させたときに、物品1が分岐搬送路3の入口部分に衝突する。
【0013】
また図15に示すように、物品1が、分岐部2の中央を行き過ぎた場合も同様であり、移載装置(図示せず)を駆動して物品1を図面右側に移動させたときに、物品1が分岐搬送路3の入口部分に衝突する。
【0014】
さらに図18の様に物品1の姿勢が傾いている場合についても同様であり、移載装置(図示せず)を駆動して物品1を図面右側に移動させたときに、物品1が分岐搬送路3の入口部分に衝突する。
【0015】
物品1が、分岐搬送路3の入口部分に衝突して正常に分岐搬送路3に移載できなかった場合は、作業者が人力で物品1の位置や姿勢を修正し、再度手動で移載装置(図示せず)を駆動し、物品1を図面右側に移動させて、分岐搬送路3に移載する。
【0016】
しかしながら、物品が自動車の車台やエンジンである場合の様に、相当の重量を有する物である場合は、人力による修正が困難となる。さらに物品が相当の重量を有する物である場合は、物品の衝突によって物品自体や物品搬送装置が破損する場合がある。そのため破損部分を復旧するのに相当の時間を要し、長時間に渡って生産ラインが停止してしまうという問題がある。
【0017】
そこで本発明は、従来技術の上記した問題点に注目し、物品の位置や姿勢を正確に判定して物品を円滑に分岐搬送路に移載することが可能な物品搬送装置を提供することを目的とする。また本発明は、物品の位置や姿勢を正確に判定することが可能であり、物品搬送装置に採用することが望ましい反射形センサーの提供を課題とするものである。
【課題を解決するための手段】
【0018】
そして上記した課題を解決するための請求項1に記載の発明は、3以上の発光素子と、発光素子の個数よりも少ない個数の受光素子とを備え、発光素子を1個づつまたはグループごとにパルス的に発光させる個別発光を実行し、前記発光素子で発光させた光を対象物で反射させ、当該反射光を前記受光素子で受光することを特徴とする反射形センサーである。
【0019】
本発明の反射形センサーでは、3以上の発光素子を有し、発光素子から照射された光が物品に反射すれば、受光素子で受光され、物品の存在が確認される。
ここで本発明の反射形センサーでは、発光素子が1個づつまたはグループごとにパルス的に発光されるので、受光素子で受光された光は、いずれの発光素子から輻射されたものであるかを判別することができる。そして本発明の反射形センサーでは、発光素子を3以上の有するから、いずれの発光素子から発光された光が反射したかを分析することによって、物品の近接状況や姿勢を判別することができる。そのため本発明の反射形センサーを物品搬送装置の分岐部に設置すると、物品の近接状況や姿勢を判別することができ、物品を円滑に分岐搬送路に移載することができる。
また本発明では、受光素子の数が少なくて足りるから、部品点数が少なく、製造コストが低い。
【0020】
請求項2に記載の発明は、個別発光の際には、各発光素子ごとの発光又はグループごとの発光に対応して、どの発光素子またはグループの発光に基づく受光であるかを個別に識別することが可能であることを特徴とする請求項1に記載の反射形センサーである。
【0021】
本発明の反射形センサーによると、物品の近接状況や姿勢を判別することができる。
【0022】
請求項3に記載の発明は、発光素子は、前記個別発光と、全ての発光素子を一斉に発光させる一斉発光を行うことを特徴とする請求項1又は2に記載の反射形センサーである。
【0023】
本発明の反射形センサーでは、前記した個別発光の他に、全ての発光素子を一斉に発光させる一斉発光を行うこともできる。
一斉発光は、例えば分岐部に物品が存在することを確認するために行われる。即ち前記した個別発光は、発光素子を1個づつまたはグループごとに発光させる動作であるから、全体の光量が少ない。これに対して一斉発光は、より多くの発光素子を発光させるので、光量が多く、誤検知や誤動作が少ない。
また一斉発光を行う場合は、各発光素子の光量も増加しておくことが望ましい。即ち一斉発光を行う場合は、各発光素子に供給する電力を増強しておく。
さらに受光素子の感度も上げておく事が推奨される。例えば、受光素子が発生する電流を増幅して判定に供したり、増幅率を増大させた状態で判定に供することが推奨される。同様に、判定の際の閾値を下げる構成も推奨される。
【0024】
請求項4に記載の発明は、4以上の発光素子と、1個の受光素子とによって構成されることを特徴とする請求項1乃至3のいずれかに記載の反射形センサーである。
【0025】
本発明は、例えば十字状に交差する物品搬送装置に採用する場合に、最も推奨される構成の反射形センサーを示すものである。
【0026】
請求項5に記載の発明は、発光素子は、受光素子を囲む位置に設けられていることを特徴とする請求項1乃至4のいずれかに記載の反射形センサーである。
【0027】
本発明では、発光素子は、受光素子を囲む位置に設けられているので、各発光素子と受光素子の位置関係が均一となる。そのため物品の近接状況や姿勢を判別する際の精度が高い。
【0028】
請求項6に記載の発明は、全ての発光素子と、受光素子との距離が等しいことを特徴とする請求項1乃至5のいずれかに記載の反射形センサーである。
【0029】
本発明の反射形センサーについても、各発光素子と受光素子の位置関係が均一となるため、物品の近接状況や姿勢を判別する際の精度が高い。
【0030】
請求項7に記載の発明は、対象物の位置又は姿勢を判別する判別機能を備えたことを特徴とする請求項1乃至6のいずれかに記載の反射形センサーである。
【0031】
本発明の反射形センサーによると、対象物の位置又は姿勢を判別することができる。
【0032】
請求項8に記載の発明は、物品搬送部を有し、物品搬送部の上に物品を載置して物品を搬送する物品搬送装置において、物品の下部又は上部を目視可能な位置に請求項1乃至7のいずれかに記載の反射形センサーを設置したことを特徴とする物品搬送装置である。
【0033】
本発明の物品搬送装置では、物品の下部又は上部を目視可能な位置に反射形センサーが設けられているから、物品の平面的な位置や姿勢を正確に判別することができる。
【0034】
請求項9に記載の発明は、物品の搬送方向を変更する分岐部を有し、分岐部に前記反射形センサーが設置され、前記反射形センサーによって物品の位置を確認し、物品の位置を修正する位置修正機能を備え、前記位置修正機能によって物品の位置を修正した後に物品を搬送することを特徴とする請求項8に記載の物品搬送装置である。
【0035】
本発明では、分岐部に反射形センサーが設置されているので、分岐部に対する物品の位置や物品の姿勢を認識することができる。そして本発明の物品搬送装置は、物品の位置を修正する位置修正機能を備えているので、位置修正機能によって物品の位置を修正した後に物品を搬送することができる。そのため本発明の物品搬送装置は、分岐部からの移載を円滑に行うことができる。
【0036】
請求項10に記載の発明は、物品に反射部材が設けられており、反射形センサーの発光素子で発光させた光を前記反射部材で反射させ、当該反射光を反射形センサーの受光素子で受光することを特徴とする請求項8又は9に記載の物品搬送装置である。
【0037】
本発明の物品搬送装置では、物品に反射部材が設けられているから、反射率の悪い物品であっても位置や存在を検知することができる。
また反射部材の大きさを適宜選択することにより、物品の位置を確認する精度を上げることができる。
【0038】
請求項11に記載の発明は、物品は搬送用パレットであり、当該搬送用パレットは裏面側に凹部を有し、凹部内に反射部材が設けられていることを特徴とする請求項10に記載の物品搬送装置である。
【0039】
本発明は、反射形センサーを物品搬送部の下側に設けた場合に適する形態を示すものである。本発明の物品搬送装置では、搬送用パレットの裏面に反射部材が設けられている。そしてパレットの裏面に凹部が設けられており、当該凹部に反射部材が設けられている。そのため反射形センサーと物品との間の距離を確保することができ、反射部材で反射した光の受光素子への入射角度を高くすることができる。
【0040】
請求項12に記載の発明は、反射形センサーによって物品の位置を示す2以上の信号と、物品の存在を確認するための信号とが作成されることを特徴とする請求項8乃至11のいずれかに記載の物品搬送装置である。
【0041】
本発明によると、物品の位置と存在を確認することができる。
【0042】
請求項13に記載の発明は、反射形センサーによって物品の位置の確認と、物品の存在確認を行うものであり、発光素子は物品の位置を確認するための発光と、物品の存在確認を行うための発光を個別に行い、物品の存在確認を行うための発光に際して受光素子の感度が高感度に変更されることを特徴とする請求項8乃至12のいずれかに記載の物品搬送装置である。
【0043】
本発明の物品搬送装置によると、反射率の低い物品であっても確実にその存在を確認することができる。
【0044】
請求項14に記載の発明は、複数の物品たる搬送用パレットを有し、搬送パレットには裏面の高さが異なるものが混在することを特徴とする請求項8乃至13のいずれかに記載の物品搬送装置である。
【0045】
本発明は、反射形センサーを物品搬送部の下側に設けた場合に適する形態を示すものである。反射形センサーを物品搬送部の下側に設けた構成を採用する場合、発光素子から発せられた光は、搬送用パレットの裏面で反射することとなる。しかしながら搬送用パレットの色はまちまちであり、黒色の様に反射率の低いものや白色の様に反射率の高いものもある。
この様な場合には、搬送パレットの高さを調節すれば、反射率の違いをある程度補正することができる。例えば、黒色の様な反射率の低いパレットは、裏面の高さを低くし、反射率の高い白色のパレットは、裏面の高さを低くする。その結果、搬送パレットには裏面の高さが異なるものが混在することとなる。
【発明の効果】
【0046】
本発明の物品搬送装置は、物品の位置や姿勢を正確に判定して物品を円滑に分岐搬送路に移載することが可能である。また本発明の反射形センサーによると、物品の位置や姿勢を正確に判定することが可能である。
【図面の簡単な説明】
【0047】
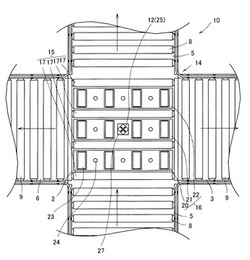
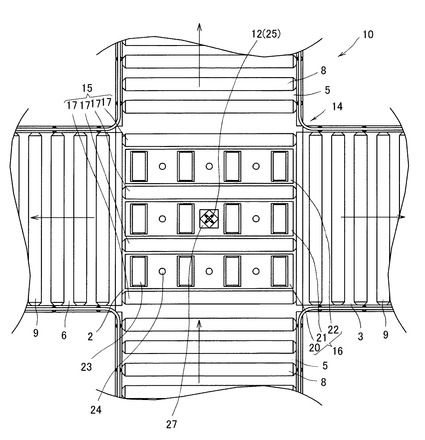
【図1】本発明の実施形態の物品搬送装置の平面図である。
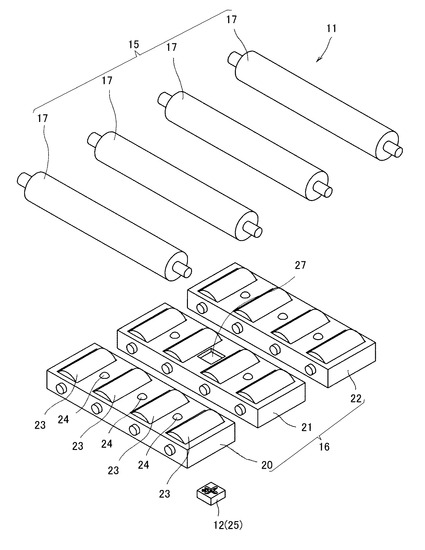
【図2】図1の搬送装置の分解斜視図である。
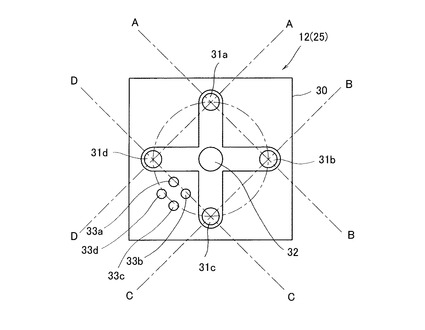
【図3】本発明の実施形態の反射形センサーの正面図である。
【図4】本発明の実施形態の反射形センサーの制御装置のブロック図である。
【図5】図4に示す反射形センサーの動作を示すタイムチャートである。
【図6】図1の物品搬送装置で使用する搬送用パレットの斜視図である。
【図7】図6の搬送用パレットの断面斜視図である。
【図8】図1の物品搬送装置の各部材の位置関係を模式的に表現した平面図である。
【図9】図1の物品搬送装置の分岐部の正規の位置に物品が停止した状態を模式的に表現した平面図である。
【図10】図9の状態における物品搬送装置の反射形センサーと物品の反射部材との位置関係を模式的に表現した平面図である。
【図11】図10の状態における反射形センサーの動作を示すタイムチャートである。
【図12】図1の物品搬送装置の分岐部の正規の位置よりも進行方向手前の位置に物品が停止した状態を模式的に表現した平面図である。
【図13】図12の状態における物品搬送装置の反射形センサーと物品の反射部材との位置関係を模式的に表現した平面図である。
【図14】図13の状態における反射形センサーの動作を示すタイムチャートである。
【図15】図1の物品搬送装置の分岐部の正規の位置を進行方向に行き過ぎた位置に物品が停止した状態を模式的に表現した平面図である。
【図16】図15の状態における物品搬送装置の反射形センサーと物品の反射部材との位置関係を模式的に表現した平面図である。
【図17】図16の状態における反射形センサーの動作を示すタイムチャートである。
【図18】図1の物品搬送装置の分岐部に、傾斜した姿勢で物品が停止した状態を模式的に表現した平面図である。
【図19】図18の状態における物品搬送装置の反射形センサーと物品の反射部材との位置関係を模式的に表現した平面図である。
【図20】図19の状態における反射形センサーの動作を示すタイムチャートである。
【図21】パレット面での反射と反射部材での反射とを比較説明する説明図である。
【図22】反射形センサーの変形例を示す正面図である。
【図23】反射形センサーの他の変形例を示す正面図である。
【図24】反射形センサーのさらに他の変形例を示す正面図である。
【図25】本発明の変形例における反射形センサーの動作を示すタイムチャートである。
【図26】本発明の他の変形例における反射形センサーの動作を示すタイムチャートである。
【発明を実施するための形態】
【0048】
以下さらに本発明の実施形態について説明する。
本実施形態の物品搬送装置10は、実際に物品を載置して搬送する機械構造部14と、分岐部2において物品1の位置と姿勢を検出する反射形センサー12等の電気構造部を有している。
機械構造部14は公知の構成であるから、反射形センサー12等の説明に先立って機械構造部14の構成と作用について説明する。
本実施形態の物品搬送装置10の機械構造部14は、分岐部2を有するローラコンベア装置である。
【0049】
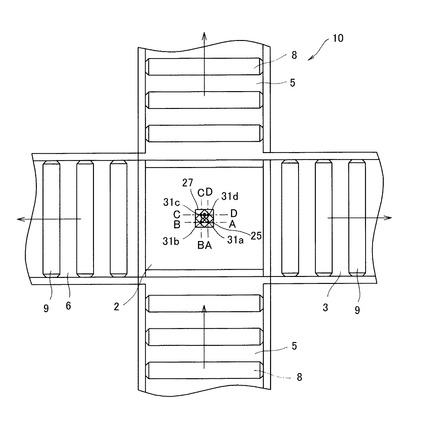
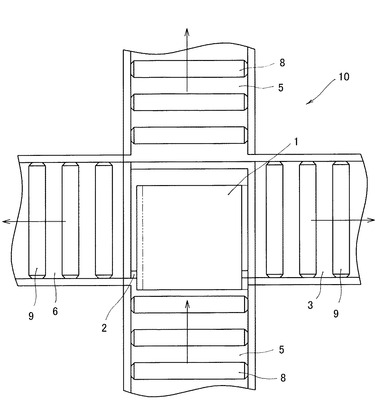
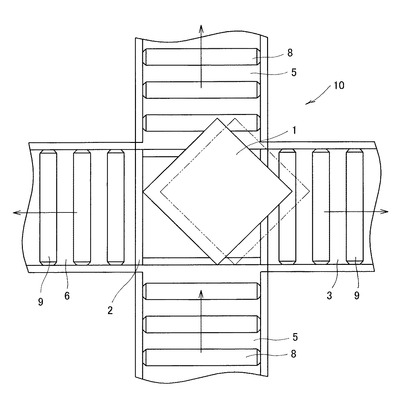
本実施形態の物品搬送装置1の機械構造部14は、主搬送路5と分岐搬送路3,6とが十字状に交差している。
即ち機械構造部14は、図面上下方向に延びる主搬送路5を有している。主搬送路5は、ローラ8が平行に多数並べて設けられたものである。主搬送路5を構成するローラ8は、図示しないモータによって回転される。主搬送路5は、ローラ8の表面に物品1を載置し、図示しないモータでローラ8を回転することによって、図面の矢印の様に図面下側から上方向に向かって物品を搬送するものである。
本実施形態の物品搬送装置1では、主搬送路5の中途に分岐部2が設けられており、当該分岐部2に二つの分岐搬送路3,6が設けられている。ここで分岐搬送路3は、分岐部2を起点として図面右側に延びる搬送路である。一方、分岐搬送路6は、分岐部2を起点として図面左側に延びる搬送路である。分岐搬送路3,6には、いずれもローラ9が並行に並べて配されており、当該ローラ9は、図示しないモータによって回転する。
【0050】
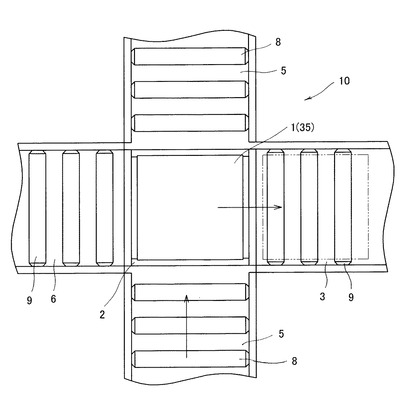
分岐部2には、移載装置11と反射形センサー12(本体部25)とが設けられている。
移載装置11は、図2の様に主搬送側走行装置15と、排出用走行装置16によって構成されている。主搬送側走行装置15は、4本のローラ17を有している。4本のローラ17は、いずれも図示しないモータによって回転されるものであり、前記した主搬送路5のローラ8と平行に並べられている。
また主搬送側走行装置15は、図示しない昇降装置に取り付けられており、主搬送側走行装置15の4本のローラ17は図示しない昇降装置によって一体的に昇降する。
【0051】
排出用走行装置16は、3列の短冊状部材20,21,22によって構成されている。短冊状部材20,21,22にはいずれも短尺のローラ23が4本平行に設けられている。排出用走行装置16の各ローラ23の軸線は、前記した主搬送側走行装置15のローラ17の軸線と直交する。
排出用走行装置16の各ローラ23についても、図示しないモータによって回転する。排出用走行装置16の各ローラ23同士の間には、自由回転する球状コロ24が設けられている。
前記した3列の短冊状部材20,21,22の内、中央に設けられた短冊状部材21には、中央に開口27が設けられている。当該開口27は、移載装置11の中心に位置している。
前記した3列の短冊状部材20,21,22は、主搬送側走行装置15の4本のローラ17の間部分に納まっている。
排出用走行装置16についても図示しない昇降装置に接続されており、3列の短冊状部材20,21,22は、当該昇降装置によって一体的に昇降する。
【0052】
前記した様に、移載装置11の主搬送側走行装置15と排出用走行装置16は、図示しない昇降装置によって昇降するが、主搬送側走行装置15が上昇位置にあり、排出用走行装置16が降下位置にある場合は、主搬送側走行装置15のローラ17が排出用走行装置16のローラ23及び球状コロ24よりも上側に突出する。
一方、排出用走行装置16が上昇位置にあり、主搬送側走行装置15が降下位置にある場合は、排出用走行装置16の短冊状部材20,21,22が、主搬送側走行装置15のローラ17同士の間から上昇し、排出用走行装置16のローラ23及び球状コロ24が主搬送側走行装置15のローラ17よりも上側に突出する。
【0053】
本実施形態の機械構造部14は、前記した様に、物品1を主搬送路5に載せて図面下側から上側に向かって搬送することができる。
物品1を直進させて分岐部2をそのまま通過させる場合には、移載装置11の主搬送側走行装置15を上昇させ、排出用走行装置16を降下させる。その結果、物品1は主搬送側走行装置15の上を通過して下流側に搬送される。
【0054】
一方、物品1を分岐搬送路3,6に排出したい場合は、物品1を一旦分岐部2で停止し、排出用走行装置16を上昇させて排出用走行装置16のローラ23に物品1を載置する。そして排出用走行装置16のローラ23を回転し、物品1を図面横方向に移動させて物品1を分岐搬送路3,6のいずれかに受け渡す。
【0055】
次に反射形センサー12等の電気構造部について説明する。
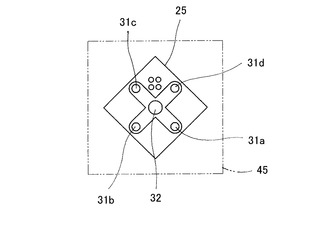
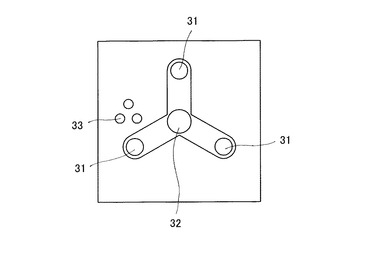
反射形センサー12は、本体部25と制御装置26(図4)によって構成されている。反射形センサー12の本体部25は、図3の様に基板30に4個の発光素子31a,b,c,dと、1個の受光素子32及び4個のパイロットランプ33a,b,c,dが取り付けられたものである。
4個の発光素子31a,b,c,dは、いずれも発光ダイオードである。パイロットランプ33a,b,c,dについても発光ダイオードが使用されている。
受光素子32は、硫化カドミウムセル(CdSセル)やフォトダイオード等の光を受けて光を受けて電気抵抗が変わる素子や、光を受けて電気を発生させる素子が使用されている。
本実施形態では、基板30の形状は正方形である。また基板の大きさは、30mm四方から100mm四方程度の大きさである。
本実施形態では、40mm四方から60mm四方の基板が採用されている。
【0056】
反射形センサー12の本体部25は、前記した正方形の基板30の表面に前記した4個の発光素子31a,b,c,dと、1個の受光素子32及び4個のパイロットランプ33a,b,c,dを取り付けられたものである。なお前記した4個の発光素子31a,b,c,dと、1個の受光素子32及び4個のパイロットランプ33a,b,c,dはいずれも基板30の表面から露出している。
【0057】
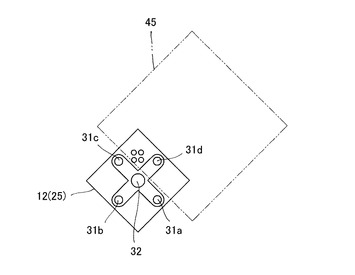
ここで4個の発光素子31a,b,c,dと、1個の受光素子32の配置に注目すると、4個の発光素子31a,b,c,dは、受光素子32を中心とする円上に等間隔に配列されている。即ち4個の発光素子31a,b,c,dは、受光素子32を取り囲む位置にあり、各発光素子31a,b,c,dと受光素子32との間の距離は等しい。
また本実施形態では、4個の発光素子31a,b,c,dは、正方形基板30の各辺に面した位置に配されている。即ち4個の発光素子31a,b,c,dの内、隣接する位置の発光素子31a,b,c,d同士を結ぶ直線は、基板30のそれぞれの角に面する。
より具体的には、図3の様に、発光素子31aと31bを結ぶA−Bライン、発光素子31bと31cを結ぶB−Cライン、発光素子31cと31dを結ぶC−Dライン、発光素子31dと31aを結ぶD−Aラインは、共に基板30の各角に面する。
【0058】
パイロットランプ33a,b,c,dは、前記した4個の発光素子31a,b,c,dの配列と相似形であってかつ小型に配列され、基板30の脇の部分に設置されている。
【0059】
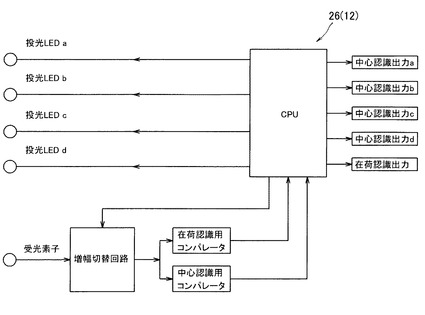
反射形センサー12の制御装置26は、図4に示す様にCPUを有し、さらに周辺回路として増幅切替回路と、中心認識用コンパレータと、在荷認識用コンパレータを備えている。
CPUに対する入力信号として、前記した中心認識用コンパレータの信号と、在荷認識用コンパレータの信号がある。
中心認識用コンパレータ及び在荷認識用コンパレータは、受光素子32から出力された信号が一定の閾値以上であるか否かを判断するものである。即ち中心認識用コンパレータ及び在荷認識用コンパレータは、基準電圧(閾値)と受光素子32から出力された信号電圧とを比較し、信号電圧の方が高い場合にはON信号を発信する。なお本実施形態では、中心認識用コンパレータの閾値が在荷認識用コンパレータの閾値よりも高い。
【0060】
中心認識用コンパレータ及び在荷認識用コンパレータには、受光素子32から出力された信号が、増幅回路(増幅切替回路)を経て入力される。そして増幅後の信号強度が、所定の閾値を越えていれば、前記した様に中心認識用コンパレータ又は在荷認識用コンパレータからCPUにON信号が発信される。
【0061】
またCPUからは、各発光素子31a,b,c,dを発光させるための起動信号が発信される。当該信号は、パルス的な信号であり、後記する様に、各発光素子31a,b,c,dを順次パルス的に発光させる個別発光信号と、各発光素子31a,b,c,dを同時に発光させる一斉発光がある。本実施形態では、発光素子31a,b,c,dを順次発光させ、これに続いて各発光素子31a,b,c,dを同時に発光させ、さらに続いて発光素子31a,b,c,dを順次発光させる動作を繰り返す様にプログラムされている。
【0062】
さらにCPUから増幅切替回路に対して切替信号が発信される。切替信号は、増幅回路(増幅切替回路)の増幅率を変更する信号である。後記する様に本実施形態の反射形センサー12は、物品の中心位置を測定する機能と、物品の存在を確認する機能を有しており、前者の物品の中心位置を測定する際には、増幅回路(増幅切替回路)の増幅率が押さえられ、前者の物品の存在を確認する際には、高い増幅率に設定される。
より具体的には、個別発光の際には低い増幅率となり、一斉発光の際には高い増幅率となる様にプログラムされている。
【0063】
またCPUからは、演算結果として、各発光素子31a,b,c,dごとに受光記録が出力される。即ちCPUが、いずれの発光素子31a,b,c,dから照射された光を受光したものかを判断し、CPUからいずれの発光素子31a,b,c,dから照射された光を受光したものかを示す信号が個別に出力される。
この信号は、図4では、「中心認識出力」と表記されている。さらに物品の存在を確認する信号が出力される。この信号は、一斉発光が行われた際に、受光素子が受光信号を発した場合にON出力される。
【0064】
次に反射形センサー12の機能について説明する。
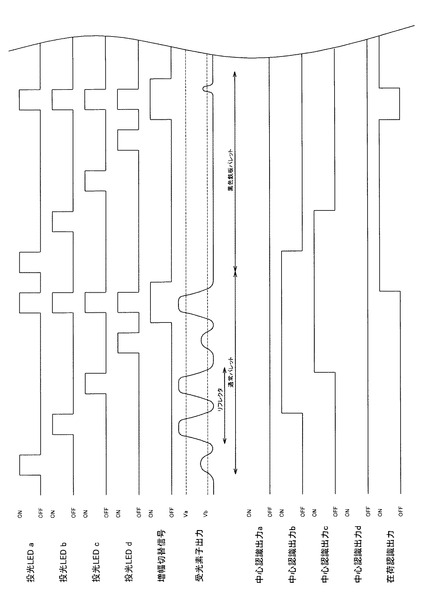
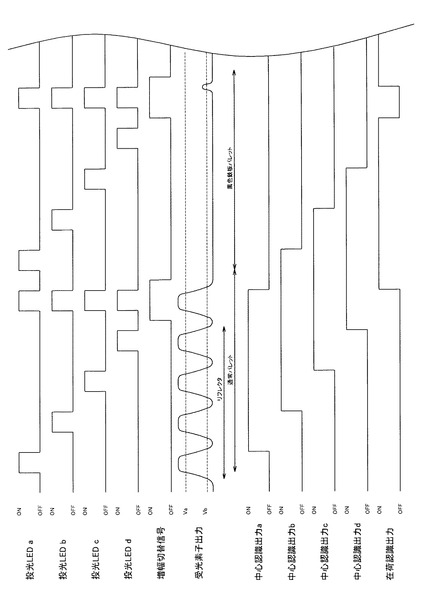
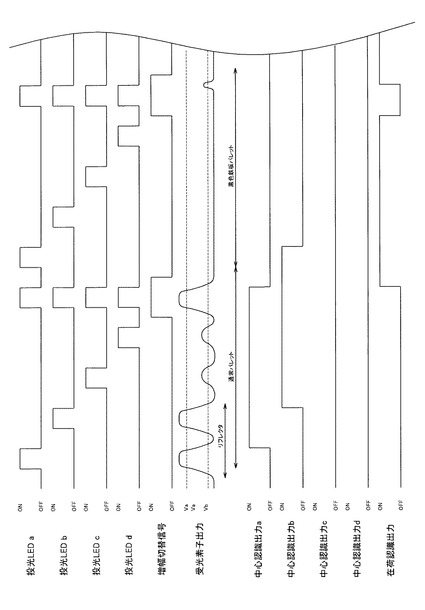
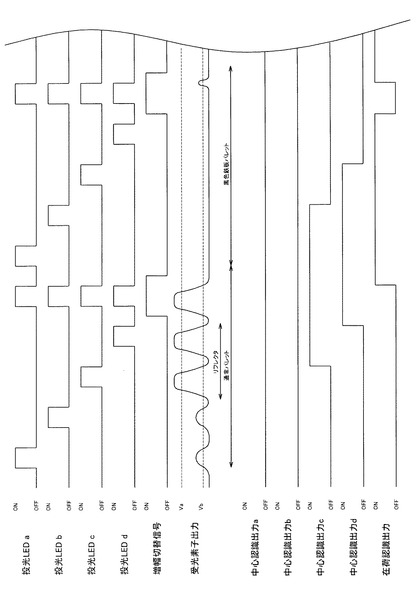
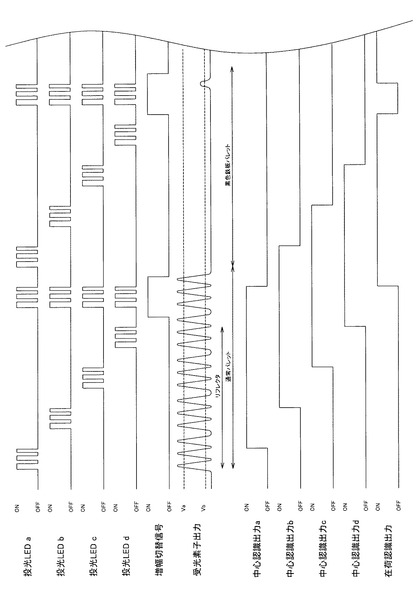
本実施形態の反射形センサー12では、図5のタイムチャートの様に、発光素子31a,b,c,dを順番に短時間だけ発光し、それに続いて発光素子31a,b,c,dの全てを一斉に短時間だけ発光させる。
即ちCPUから、発光素子31aを発光させる信号が短時間だけ発信される。そして発光素子31aが消灯した後、しばらく時間を空けて次の発光素子31bを発光させる信号が短時間だけ発信される。さらに発光素子31bが消灯した後、しばらく間を空けて次の発光素子31cを発光させる信号が短時間だけ発信される。さらに発光素子31cが消灯した後、しばらく間を空けて次の発光素子31dを発光させる信号が短時間だけ発信される。
そして発光素子31a,b,c,dの個別の発光が終了すると、しばらく間を空けて発光素子31a,b,c,dを一斉に発光させる。
【0065】
各発光素子31a,b,c,dの発光時間及び間隔は、1msec〜30msec程度の短い時間であり、パルス的な発光である。
【0066】
また各発光素子31a,b,c,dを発光させるのと同時に、受光素子32が受光を受け入れる。そして受光素子32が光を受光すると、受光素子32が発信した信号が増幅回路(増幅切替回路)で増幅され、さらに中心認識用コンパレータ又は在荷認識用コンパレータに送信される。
ここで、発光素子31a,b,c,dを順番に短時間だけ発光させる個別発光の段階では、CPUから増幅回路(増幅切替回路)に対して低増幅率を選択する信号(図5では、増幅切替信号OFF)が発信される。またコンパレータは、中心認識用コンパレータが選択される。
【0067】
その結果、受光素子32が発信する受光信号は、増幅回路(増幅切替回路)において低い増幅率で増幅され、さらに中心認識用コンパレータにおいて高い閾値でON,OFF選択の判断がなされる。
そしてこのON,OFF信号がCPUに送られる。CPUでは、発光素子31a,b,c,dの発光のタイミングと、受光素子32からの信号発信のタイミングを考慮して、今回のON信号がいずれの発光素子31a,b,c,dの発光に起因するものであるかを判別する。
【0068】
これを図5のタイムチャートに基づいて説明すると次の通りである。
図5に示すタイムチャートでは、「通常パレット」と表示されている期間は、通常色のパレットが反射形センサー12の上部を通過し、「通常パレット」と表示されている期間は、反射率の低い黒色のパレットが反射形センサー12の上部を通過している。また「リフレクタ」と表示されている期間は、後記する反射部材45が反射形センサー12の上部を通過しているものとする。
【0069】
タイムチャートの上段の「投光LEDa,b,c,d」は、CPUから発光素子(正確にはスイッチング回路)に対して発信される信号である。この信号がONの時には、発光素子31a,b,c,dが発光していることとなる。
一方、「受光素子出力」は、受光素子出力の出力を表している。前記した様に発光素子31a,b,c,dは順番に短時間だけ発光するから、発光素子31a,b,c,dが発光すると、周囲が明るくなり、受光素子32は、その光を関知して受光量に応じた電圧を出力する。
しかしながら、発光素子31a,b,c,dの発光が、物に反射して受光素子32に直接入射される場合と、光の散乱によって受光素子32に間接的に入射される場合とでは、おのずと光量が異なるから、物に反射して受光素子32に入射した場合の信号強度(電圧)は、散乱光による場合に比べて高い。
【0070】
フローチャートに準じて説明すると、一回の個別発光及び一斉発光を見たとき、発光素子31a,b,c,dの発光に応じて、受光素子32から5回(5山)受光信号が出るが、最初の信号は弱く(山が低く)、次の2回は、強く(山が高く)、さらに続くは弱く(山が低く)、最後の信号は強い(山が高い)。
【0071】
これは、2回目、3回目、5回目の発光の際は、物に発光した反射光を受講素子32が直接的に受光したものであり、1回目と4回目は、散乱光を受光したものであることを示している。
そのため中心認識用コンパレータは、この強い信号が出た場合だけを選別し、ON信号をCPUに送る。
CPUでは、強い信号が出た時期と、自らが「投光LEDa,b,c,d」を発光素子31a,b,c,d側に発信した時期を比較し、ON信号がいずれの発光素子31a,b,c,dの発光に起因するものであるかを判別する。
より具体的に説明すると、「投光LEDa,b,c,d」のタイムチャートと、「受光素子出力」のタイムチャートを比較し、「受光素子出力」が高出力であって、「投光LEDa,b,c,d」がONである発光素子31a,b,c,dを選び、その発光素子a,b,c,dに該当する「中心認識出力」をONにする。
また「受光素子出力」が高出力であって、全ての「投光LEDa,b,c,d」がONである場合には、在荷認識出力をONにする。
【0072】
判別の結果は、それぞれ個別に出力されるが、判別の結果受光素子32からの信号がONであった場合の信号は、CPU内で一時的に自己保持され、タイムチャートの様に一定時間に渡ってONの状態が続く。
またCPU内から出力された判別信号は、反射形センサー12の本体部25に発信され、対応するパイロットランプ33a,b,c,dが点灯する。前記した様に、発光素子31a,b,c,dの発光時間は、極めて短いので、肉眼によって発光を確認することができないが、判別の結果、CPUが発信される信号は、自己保持されていて一定時間に渡って出力され続けるので、パイロットランプ33a,b,c,dは暫くの時間点灯し、肉眼でも確認することができる。
【0073】
個別発光に続いて各発光素子31a,b,c,dを同時に発光させる一斉発光が行われる。一斉発光の際には、CPUから増幅回路(増幅切替回路)に対して高増幅率を選択する信号(図5では、増幅切替信号ON)が発信される。またコンパレータは、在荷認識用コンパレータが選択される。
【0074】
その結果、受光素子32が発信する受光信号は、増幅回路(増幅切替回路)において高い増幅率で増幅され、さらに在荷認識用コンパレータにおいて低い閾値でON,OFF選択の判断がなされる。
そしてこのON,OFF信号がCPUに送られる。一斉発光に起因するON,OFF信号は、CPUを経由して外部に出力されるが、受光素子32からの信号がONであった場合の信号は、CPU内で一時的に自己保持され、タイムチャートの様に一定時間に渡ってONの状態が続く。
【0075】
例えば反射率の低い黒色のパレットが物品であった場合、物品から反射される光が弱いから、図5のタイムチャートの後半の様に一斉発光しても、受光素子から出力される電圧は低い。しかしながら本実施形態では、一斉発光の際には、受光素子32が発信する受光信号は、増幅回路(増幅切替回路)において高い増幅率で増幅され、さらに在荷認識用コンパレータにおいて低い閾値でON,OFF選択の判断がなされるので受光素子の感度が高感度に変更されており、存荷認識出力がONとなる。
【0076】
次に反射形センサー12と機械構造部14との関係について説明する。本実施形態の物品搬送装置10では、反射形センサー12の本体部25が機械構造部14の分岐部2の中心に配置されている。即ち本実施形態で採用する機械構造部14は、主搬送路5と分岐搬送路3,6とが十字状に交差するので、分岐部2の形状は、図1の様に正方形となる。そして分岐部2には、前記した様に移載装置11が設けられているが、移載装置11の中央の短冊状部材21に開口27が設けられており、当該開口27を臨む位置に反射形センサー12の本体部25が設けられている。
【0077】
前記した様に開口27は、移載装置11の中心にあるから、反射形センサー12の本体部25は、移載装置11の中心に設けられ、さらにこの位置は分岐部2の中心位置でもある。
物品1は、前記した様に主搬送側走行装置15又は排出用走行装置16に載置されて運搬されるから、開口27から上を見上げると、物品1の下部が直接見える。即ち反射形センサー12の本体部25は、物品1の下部を目視可能な位置に設置されている。
従って開口27から上を見上げると、物品1の平面的な位置が分かり、物品1が、分岐部2に対してどの様な位置関係にあり、かつどの様な姿勢であるかを判断することができる。
【0078】
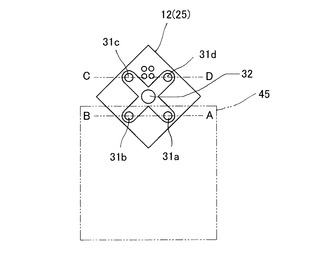
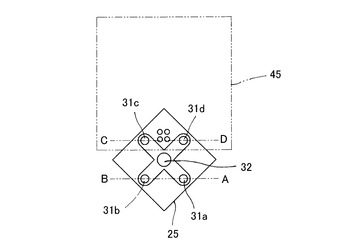
また反射形センサー12の本体部25は、正方形の分岐部2に対して90度傾斜した姿勢で取り付けられている。即ち前記した様に反射形センサー12の本体部25は正方形であり、4個の発光素子31a,b,c,dは、正方形基板30の各辺に面した位置に配されている。これに対して反射形センサー12の本体部25は、分岐部2に対して90度傾斜した姿勢で取り付けられているから、4個の発光素子31a,b,c,dは、図8の様に正方形の分岐部2の各角に面した位置に配される。
そのため隣接する発光素子31同士を結ぶ直線は、いずれも分岐部2の各辺と平行となる。
具体的には、発光素子31aと31bを結ぶA−Bライン、発光素子31bと31cを結ぶB−Cライン、発光素子31cと31dを結ぶC−Dライン、発光素子31dと31aを結ぶD−Aラインは、共に分岐部2の各辺と平行となる。
【0079】
即ち発光素子31aと31bを結ぶA−Bラインは、分岐部2と主搬送路5の上流側(物品1の搬送方向の上流側)との境界線と平行である。発光素子31bと31cを結ぶB−Cラインは、分岐部2と図面左側の分岐搬送路6との境界線と平行である。発光素子31cと31dを結ぶC−Dラインは、分岐部2と主搬送路5の上流側(物品1の搬送方向の下流側)との境界線と平行である。発光素子31dと31aを結ぶD−Aラインは、分岐部2と図面右側の分岐搬送路3との境界線と平行である。
【0080】
次に本実施形態の物品搬送装置10の全体的な動作について説明する。
本実施形態では、搬送物を図6,7の様なパレット35に載置して搬送する。そのため本実施形態では、反射形センサー12にパレット35を物品1として認識させる。
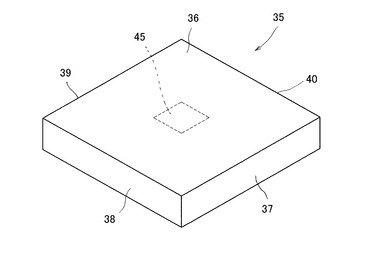
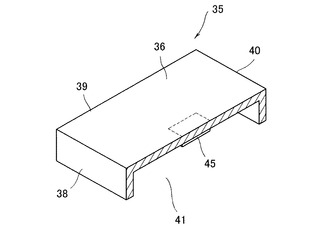
パレット35は、樹脂又は金属で作られた高さの低い筐体である。パレット35は、天板36とそれに繋がる4つの側壁37,38,39,40を有している。パレット35では、底の部分は開放されており、図7の様に天板36の下には空間41がある。
そして本実施形態では、天板36の裏の中心に反射部材45が設けられている。反射部材45は、物品1の他の部分よりも反射率が高い部材である。即ち反射部材45は、金属板や金属箔等の反射率が高い部材であり、本実施形態では、アルミ箔が使用されている。
【0081】
反射部材45は、実際には、前記した反射形センサー12の本体部25の大きさと大差ないものであり、50mm四方程度の大きさである。これに対してパレット35は実際には1000mm四方程度の大きさであるが、理解を容易にするために、図面では、反射部材45の大きさを大きく描いている。
【0082】
以下、図8に示す物品搬送装置10を基準として説明する。なお図8は、物品搬送装置10の動作説明のために作図されたものであり、分岐部2の周辺を図示したものであるが、移載装置11の図示は省略している。
また以下の説明では、物品1を主搬送路5に載置して図面下側から上に向かって搬送し、一旦分岐部2で停止して、排出用走行装置16を上昇させて排出用走行装置16のローラ23に物品1を載置し、物品1を図面右方向に移動させて物品1を分岐搬送路3に受け渡すことを想定している。
【0083】
前記した様に、物品1を図面右方向に移動させて物品1を分岐搬送路3に受け渡すには、図9に示すように、分岐部2の中央に物品1が停止してることが大切である。
【0084】
即ち図9は、正規の位置に物品1(パレット35)が停止した状態を模式的に表現した平面図であるが、この時のパレット35の裏面に貼られた反射部材45と、反射形センサー12の本体部25との関係は、図10の通りである。即ちパレット35が分岐部2の中央にある場合は、反射形センサー12の本体部25の真上の位置に反射部材45がある。
そしてこの状態で、本体部25の発光素子31a,b,c,dが個別発光及び一斉発光を繰り返す。
個別発光の段階においては、図11のタイムチャートの様に、本体部25の発光素子31a,b,c,dが順次短時間づつ発光する。ここで本体部25の真上の位置には、反射部材45があるから、いずれの発光素子31a,b,c,dが発光しても、その反射光は、中央の受光素子32に入光される。
【0085】
そのため個別発光によって発光素子31a,b,c,dが順次発光すると、この光は、それぞれ受光素子32に入光され、図11のタイムチャートの「受光素子出力」のグラフの様に、受光素子32がそれぞれの発光タイミングに呼応して受光信号を発信する。この受光信号は、増幅回路(増幅切替回路)を経て中心認識用コンパレータに入力され、中心認識用コンパレータでON信号が生成される。そしてこのON信号は、CPUに送られて、発光素子31a,b,c,dの発光のタイミングと、受光素子32からの信号発信のタイミングを考慮して、今回のON,OFF信号がいずれの発光素子31a,b,c,dの発光に起因するものであるかが判定され、結果的に全ての発光素子31a,b,c,dからの発光が受光されたことが確認される。
即ち図11のタイムチャートの様に、中心認識出力a,b,c,dが全てONとなる。
なお一斉発光の際にも受光素子32に光か入射されるので、在荷認識信号もONとなり、分岐部2上に物品1(パレット35)が存在することが再確認される。
【0086】
本実施形態では、反射形センサー12の本体部25は、個別発光と一斉発光とを常時繰り返しているから、逆に、CPUからの出力パターンが、図11に示す様に、中心認識出力a,b,c,dが全てONとなる状態を呈すれば、物品1(パレット35)の中心と、分岐部2とが一致したことが分かる。そのため、CPUからの出力パターンが、中心認識出力a,b,c,dが全てONとなる状態となったことを確認して、移載装置11を動作させれば、物品1(パレット35)が他の部材と衝突することはない。
またCPUからの出力パターンが、中心認識出力a,b,c,dが全てONとなる状態となっていなければ、移載装置11の主搬送側走行装置15を正方向または逆方向に駆動し、物品1(パレット35)を微調整して物品1(パレット35)の中心と、分岐部2の中心とを一致させる。本実施形態の物品搬送装置10では、移載装置11に物品1(パレット35)が乗って主搬送側走行装置15を停止させた際に、CPUからの出力パターンが、中心認識出力a,b,c,dが全てONとなる状態となっていなければ、自動的に主搬送側走行装置15が正方向または逆方向に駆動し、物品1(パレット35)の位置が微調整される。
【0087】
例えば、図12の様に、物品1が、分岐部2の中央に至るまでの間で停止してしまった場合を想定すると、CPUからの出力パターンは、図14の様に、中心認識出力a,b,がONで、中心認識出力c,dがOFFとなる。
【0088】
即ち物品1が、分岐部2の中央に至るまでの間で停止してしまった場合における反射部材45と、反射形センサー12の本体部25との関係は、図13の様であり、反射部材45は、発光素子31aと31bを結ぶA−Bラインを越えているが、発光素子31cと31dを結ぶC−Dラインには達していない。そのため発光素子31a及び31bが発光した光は、受光素子32に入光されるが、発光素子31c,31dが発光した光は受光素子32に入光されず、中心認識出力a,bがONで、中心認識出力c,dがOFFとなる。
そのため図14の出力パターンの様に、中心認識出力a,bがONで、中心認識出力c,dがOFFとなった場合は、移載装置11の主搬送側走行装置15を僅かに前進方向に移動させ、物品1(パレット35)を前進させて物品1(パレット35)を中央に寄せる。そしてCPUからの出力パターンが、中心認識出力a,b,c,dが全てONとなる状態に変化すると、移載装置11を動作させ、物品1を分岐搬送路3側に排出する。
【0089】
また図15に示すように、物品1が、分岐部2の中央を行き過ぎてしまった場合は、CPUからの出力パターンは、図17の様に、中心認識出力c,dがONで、中心認識出力a,bがOFFとなる。
【0090】
即ち物品1が、分岐部2を行き過ぎてしまった場合における反射部材45と、反射形センサー12の本体部25との関係は、図16の様であり、反射部材45は、発光素子31cと発光素子31dを結ぶC−Dラインの上にあるものの、発光素子31aと発光素子31bを結ぶA−Bラインは越え去ってしまっている。そのため発光素子31cと発光素子31dが発光した光は、受光素子32に入光されるが、発光素子31aと発光素子31bが発光した光は受光素子32に入光されず、中心認識出力c,dがONで、中心認識出力a,bがOFFとなる。
【0091】
そのため図17の出力パターンの様に、中心認識出力c,dがONで、中心認識出力a,bがOFFとなった場合は、移載装置11の主搬送側走行装置15を僅かに後退方向に移動させ、物品1(パレット35)を後退させて中央に寄せる。そしてCPUからの出力パターンが、中心認識出力a,b,c,dが全てONとなる状態に変化すると、移載装置11を動作させ、物品1を分岐搬送路3側に排出する。
【0092】
また図18に示す様に、物品1が傾斜した姿勢で分岐部2に入った場合は、CPUからの出力パターンは、図20の様に、中心認識出力dだけがONで、他の中心認識出力a,b,cがOFFとなる。
即ち物品1が、図18の様な姿勢で分岐部2に入った場合における反射部材45と、反射形センサー12の本体部25との関係は、図19の様であり、反射部材45は、発光素子31dだけに掛かり、他の発光素子31a,b,cからは外れている。そのため発光素子31dが発光した光は、受光素子32に入光されるが、他の発光素子31a,b,cが発光した光は受光素子32に入光されず、中心認識出力dだけがONで、中心認識出力a,b,cがOFFとなる。
そのため図20の出力パターンの様に、中心認識出力dがONで、中心認識出力a,b,cがOFFとなる。
【0093】
本実施形態の物品搬送装置10では、図18に示す様な姿勢で分岐部2に入った場合の修正を自動的に行うことはできず、何らかの警報を発して作業者に注意を喚起し、人力によって姿勢を修正することとなる。
【0094】
本実施形態では、前記した個別発光だけでなく、一斉発光も行われる。前述した様に個別発光は、物品1の中心位置を所定の位置に合わせるために使用される。これに対して一斉発光は、単に、分岐部2上に物品1が存在するか否かの確認に使用される。
前記した個別発光の際には、物品1の中心位置を分岐部2の中心位置に正確に合致させるため、反射部材45を反射ターゲットとし、他の部材からの反射は、極力ノイズとして除去できる様に工夫している。即ち前記した様に個別発光の際には、受光素子32が発信する受光信号は、低い増幅率で増幅され、さらに中心認識用コンパレータにおいて高い閾値でON,OFF選択の判断がなされる。
【0095】
これに対して、単に分岐部2上に何らかの物が存在するか否かを確認する場合は。反射部材45だけでなく、物品1のいずれか一部からの反射もノイズとして除外するべきではない。そのため単に分岐部2上に何らかの物が存在するか否かを確認する場合には、物品1の一部からでもより強い反射光を得るべきである。また単に分岐部2上に何らかの物が存在するか否かを確認する場合には、受光素子32の感度についてもより高めておく必要がある。
【0096】
そのため本実施形態では、単に分岐部2上に何らかの物が存在するか否かを確認するために、発光素子31a,b,c,dを一斉発光させる。そして一斉発光に対応してCPUから増幅切替信号ONの信号が発信される。またコンパレータは、在荷認識用コンパレータが選択される。
その結果、受光素子32が発信する受光信号は、増幅回路(増幅切替回路)において高い増幅率で増幅され、さらに中心認識用コンパレータにおいて低い閾値でON,OFF選択の判断がなされる。
【0097】
また一斉発光に際しては、全ての発光素子31a,b,c,dが発光するので、光り量そのそものが多い。この様に、一斉発光に際しては、発光量が多く、増幅率が高く、かつ閾値が小さいので、物品の有無を確実に検知することができる。本実施形態の物品搬送装置10では、上記した様な工夫がなされているので、例えばパレット35の色が黒や灰色といった光を反射しにくい色であっても、分岐部2上にパレット35が存在することを認識することができる。
【0098】
以上説明した実施形態では、パレット35の形状として天板36とそれに繋がる4つの側壁37,38,39,40を有した形状を採用し、天板36の裏に反射部材45が設けた。即ちパレット35の裏面に凹部を設け、反射部材45の取付け位置を反射形センサー12の本体部25から離した。この構成は、中心位置を検知する際の正確性を向上させる効果があり、推奨される構成である。
即ちパレット35が主搬送路5に載置されて搬送され、分岐部2に差しかかった状態を想定すると、まず最初にパレット35のいずれかの側壁37,38,39,40の下面が、反射形センサー12の本体部25の上を通過する。
そして前記した様に、本実施形態では、反射形センサー12は、個別発光と一斉発光とを常時繰り返しているから、個別発光の光が側壁37,38,39,40の下面で反射されて受光素子32に入光してしまう懸念がある。この様な誤検知は、パレット35を金属の様な反射し易い素材で製作した場合に強く懸念される。
【0099】
しかしながら、本実施形態では、反射部材45の取付け位置が、パレット35の側壁37,38,39,40の下面よりも高い位置にあるので、この様な誤検知は起こりにくい。
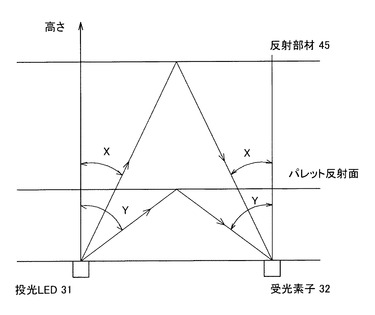
即ち図21の様に、発光素子(投光LED)31から発光された光が受光素子32に入光する経路を考えると、反射部材45によって反射される光が受光素子32に入光する場合における発光素子(投光LED)31からの輻射角度X及び入射角度Xは、パレット35の側壁37,38,39,40によって反射される光が受光素子32に入光する場合における輻射角度Y及び入射角度Yに比べて小さい。そのため発光素子(投光LED)31の光量が一定でかつ、反射部材45とパレット35の側壁37,38,39,40の下面の反射率が同一であるならば、反射部材45によって反射される光の方が、パレット35によって反射される光に比べて格段に強い。
【0100】
ましてや現実には、反射部材45の反射率は、パレット35の側壁37,38,39,40に比べて格段に高いので、反射部材45によって反射される光の方が、パレット35によって反射される光に比べて格段に強い。
そのため中心認識用コンパレータの閾値や、増幅切替回路の増幅率を適宜選定することによって、前記した側壁37,38,39,40の下面からの反射をノイズとして除外することができ、誤検知を未然に防止することができる。
【0101】
前記した実施形態では、パレット35の裏面に凹部を設け、反射部材45の取付け位置を反射形センサー12の本体部25から離したが、反射部材45と反射形センサー12との距離は、パレット35の色や、反射部材45の素材によって変わるものであり、実地の調整によって定められる。そのため裏面の高さが異なるパレット35が混在することもある。
【0102】
以上説明した実施形態では、個別発光の際に、発光素子31a,b,c,dを左回りに順次発光させたが、発光の順番は任意である。また各発光素子31a,b,c,dをランダムに発光させてもよい。
【0103】
以上説明した実施形態では、発光素子31を4個設け、受光素子32を1個設けた構成を例示したが、発光素子31の数は、3個以上であればよい。また受光素子の数は2以上であってもよいが、発光素子31の数よりも多くすることは無駄であり、また受光素子32の数は、発光素子31の数よりも少ないことが必要である。
【0104】
図22は、発光素子31を3個設けて正三角形の位置に配し、その中心に受光素子32を1個設けた例を示している。
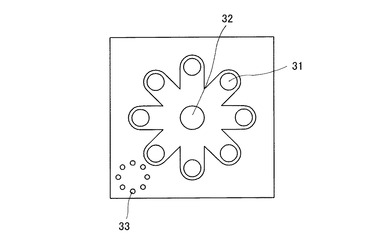
また図23は、発光素子31を多数設けて円形に配し、その中心に受光素子32を1個設けた例を示している。
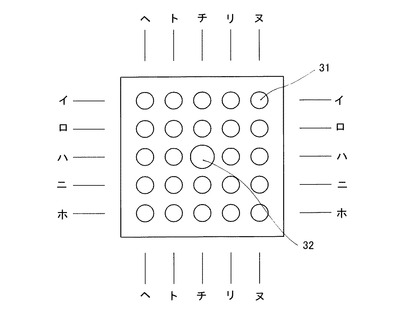
また図24は、発光素子31を多数設けて行列状に配し、その中心に受光素子32を1個設けた例を示している。
【0105】
図23、図24の様に発光素子31を多数個設ける場合は、発光素子31をグループ分けしてグループごとに発光させてもよい。
例えば、図24に示す反射形センサーでは、イ−イ列、ロ−ロ列という様に列ごとにグループ分けしたり、へ−へ行、ト−ト行という様に行ごとにグループ分けし、個別発光の際にグループに属する発光素子31を一斉に発光させてもよい。
【0106】
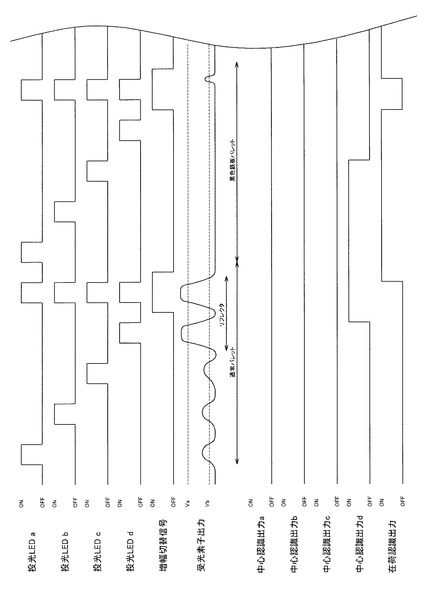
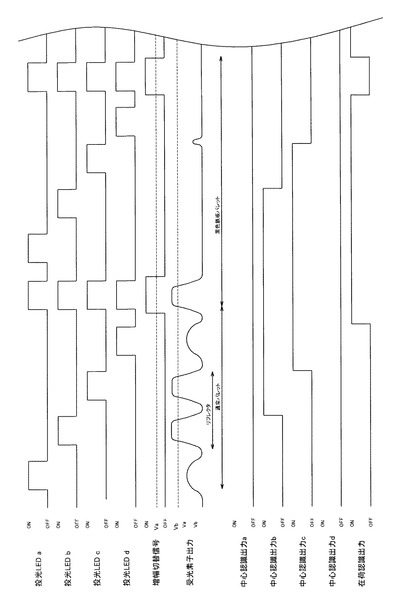
また先の実施形態では、個別発光の際の発光素子31の発光は、各回ごとに一パルスであったが、図25に示す様に、各回ごとに複数パルス発光させてもよい。図25に示す実施形態では、各回ごとに3パルス発光させ、さらに最後のパルスは、他の2回に比べて時間が発光時間が短い。
【0107】
また先の実施形態では、4個の発光素子31a,b,c,dを順次個別に発光させた後に、一斉発光を行ったが、発光素子31aの発光の後に一斉発光を行い、さらに次の発光素子31bを発光させた後に一斉発光を行うという様に、個別発光と一斉発光とを並行的に実行してもよい。
【0108】
前記した実施形態では、個別発光の際には、発光素子31a,b,c,dが間隔を空けて発光する。即ちいずれの発光素子31a,b,c,dも発光しない時間を故意に作っている。しかしながらこの構成は必須ではなく、一つの発光素子31aが発光中に次の発光素子31bの発光を開始してもよい。即ち図26に示すタイムチャートの様に複数の発光素子31が同時に発光しているタイミングが存在してもかまわない。要するにただ一つ、又は一グループに属する発光素子だけが発光しているタイミングを作ることができれば足りる。
この構成を採用する場合は、ただ一つ、又は一グループに属する発光素子31だけが発光した際の受光素子の信号をもってどの発光素子31a,b,c,dの光を受光したのかを判定する。
【0109】
上記した実施形態では、隣接する発光素子31同士を結ぶラインを分岐部2の各辺と平行となる様に配置した。この構成は、物品1が正しい姿勢で分岐部2に近接する際、いずれの方向から近接しても、同時に2個の発光素子31からの光を反射することとなり、近接の判定や姿勢の分析が正確に行えるという利点がある。
しかしながら本発明は、この構成に限定されるものではなく、発光素子31を分岐部2の角に面した位置に配置してもよい。
【0110】
本発明の反射形センサーは、物品搬送装置の分岐部に設置することを目的として開発された経緯があるが、反射形センサーの用途は、物品搬送装置に限定されるものではない。例えば人や動物の接近を検知する用途にも本発明の反射形センサーを利用することができる。
【符号の説明】
【0111】
1 物品
2 分岐部
3 分岐搬送路
5 主搬送路
6 分岐搬送路
8 ローラ
9 ローラ
10 物品搬送装置
11 移載装置
12 反射形センサー
15 主搬送側走行装置
16 排出用走行装置
17 ローラ
20,21,22 短冊状部材
23 ローラ
25 反射形センサーの本体部
26 制御装置
27 開口
30 基板
31a,b,c,d 発光素子
32 受光素子
33a,b,c,d パイロットランプ
35 パレット
36 天板
41 空間
45 反射部材
【技術分野】
【0001】
本発明は、ローラコンベア装置やベルトコンベア装置等の物品搬送装置に関するものである。また本発明は物品の位置確認や位置決めを行う用途に適する反射形センサーに関するものである。
本発明の物品搬送装置及び反射形センサーは、分岐部を有して物品を主搬送路から分岐搬送路等に受け渡す構造を備えた物品搬送装置に適用することができるものである。
【背景技術】
【0002】
組み立て工場や、宅配便の仕分け場、あるいは収納倉庫等では、ローラコンベア等の物品搬送装置が縦横に巡らされ、物品が所望の位置に自動搬送される。
例えば自動車の組み立て工場では、車台を組み立てるラインや、エンジンを組み立てるラインに物品搬送装置が配置されている。そしてエンジンを車台に組み込むラインでは、例えばエンジン組み立てラインを分岐して車台組み立てラインの近傍に至る物品搬送装置が設けられている。
【0003】
宅配便の仕分け場では、多数の分岐部を有して網の目の如く細かく分岐された物品搬送網が構築されており、末端の分岐搬送路は、荷物の行き先に応じて決められた荷物置場に至っている。
【0004】
また立体駐車場や立体倉庫等の収納倉庫においても、多数の分岐部を有して網の目の如く細かく分岐された物品搬送網が構築されており、末端の分岐搬送路は、定められた住所の物品置場に至っている。
【0005】
この様に近年の物品搬送装置は、物品をただ単に直線的に搬送するだけではなく、分岐搬送路を設けて物品を複数の目的地に個別に搬送する機能を備えたものが多い。
即ち近年の物品搬送装置には、主搬送路に対して複数の分岐搬送路が設けられていて搬送路が枝分かれしており、分岐部で物品を移載して目的の場所に物品を搬送する構成を備えたものがある。
【0006】
この種の物品搬送装置では、例えば特許文献1に開示された様な移載装置が採用され、当該移載装置が主搬送路と分岐搬送路との分岐部に設置される。そして分岐搬送路に移載すべき物品が分岐部に至ると、分岐部上に物品を停止し、移載装置を起動して物品を主搬送方向に対して垂直方向に移動させ、物品を主搬送路から分岐搬送路に載せ変える。
【0007】
また分岐部上に搬送物が運ばれて来たか否かは、物品搬送装置に設けたセンサーによって判定する。例えば分岐部の近傍に反射形の光電センサーを設け、光電センサーから分岐部に向かって光を照射する。もし分岐部上に物品が存在するならば光電センサーから照射された光が反射して光電センサーに戻るので、この反射光の有無をもって分岐部上に物品が有るか否かを判定することができる。
【0008】
また分岐部上の物品の有無を検知する反射形センサーとして特許文献2に開示された構成のものが知られている。
特許文献2に開示された反射形センサーは、一つの発光素子と、4個の受光素子とによって構成されている。そして従来技術の反射形センサーでは、4個の受光素子は、いずれも一つの発光素子の周囲に配置されている。また各受光素子と中央の発光素子のとの距離はいずれも異なっている。
【0009】
従来技術の反射形センサーでは、中央の発光素子を発光させて物品に照射し、その反射光を周囲の4個の受光素子で受光する。そして2個以上の受光素子が共に反射光を検知しした場合に限って物品の存在を肯定することとし、受光素子等の誤動作領域をカバーしている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平6−312832号公報
【特許文献2】特開2008−103969号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
上記した様に、物品を主搬送路から分岐搬送路に移載する場合は、物品を分岐部で停止し、分岐部に設置した移載装置を駆動して物品を分岐搬送路に排出する。
即ち図9に示すように、物品1を分岐部2の中央で停止させ、分岐部2に設けられた移載装置(図示せず)を駆動して物品1を図面右側に移動させ、右側の分岐搬送路3に物品1を排出する。
【0012】
しかしながら、例えば図12の様に主搬送路5が矢印の様に図面下側から図面上側に向かって物品1を搬送するものと仮定したとき、物品1が、分岐部2の中央に至るまでの途中で停止してしまうと、移載装置(図示せず)を駆動して物品1を図面右側に移動させたときに、物品1が分岐搬送路3の入口部分に衝突する。
【0013】
また図15に示すように、物品1が、分岐部2の中央を行き過ぎた場合も同様であり、移載装置(図示せず)を駆動して物品1を図面右側に移動させたときに、物品1が分岐搬送路3の入口部分に衝突する。
【0014】
さらに図18の様に物品1の姿勢が傾いている場合についても同様であり、移載装置(図示せず)を駆動して物品1を図面右側に移動させたときに、物品1が分岐搬送路3の入口部分に衝突する。
【0015】
物品1が、分岐搬送路3の入口部分に衝突して正常に分岐搬送路3に移載できなかった場合は、作業者が人力で物品1の位置や姿勢を修正し、再度手動で移載装置(図示せず)を駆動し、物品1を図面右側に移動させて、分岐搬送路3に移載する。
【0016】
しかしながら、物品が自動車の車台やエンジンである場合の様に、相当の重量を有する物である場合は、人力による修正が困難となる。さらに物品が相当の重量を有する物である場合は、物品の衝突によって物品自体や物品搬送装置が破損する場合がある。そのため破損部分を復旧するのに相当の時間を要し、長時間に渡って生産ラインが停止してしまうという問題がある。
【0017】
そこで本発明は、従来技術の上記した問題点に注目し、物品の位置や姿勢を正確に判定して物品を円滑に分岐搬送路に移載することが可能な物品搬送装置を提供することを目的とする。また本発明は、物品の位置や姿勢を正確に判定することが可能であり、物品搬送装置に採用することが望ましい反射形センサーの提供を課題とするものである。
【課題を解決するための手段】
【0018】
そして上記した課題を解決するための請求項1に記載の発明は、3以上の発光素子と、発光素子の個数よりも少ない個数の受光素子とを備え、発光素子を1個づつまたはグループごとにパルス的に発光させる個別発光を実行し、前記発光素子で発光させた光を対象物で反射させ、当該反射光を前記受光素子で受光することを特徴とする反射形センサーである。
【0019】
本発明の反射形センサーでは、3以上の発光素子を有し、発光素子から照射された光が物品に反射すれば、受光素子で受光され、物品の存在が確認される。
ここで本発明の反射形センサーでは、発光素子が1個づつまたはグループごとにパルス的に発光されるので、受光素子で受光された光は、いずれの発光素子から輻射されたものであるかを判別することができる。そして本発明の反射形センサーでは、発光素子を3以上の有するから、いずれの発光素子から発光された光が反射したかを分析することによって、物品の近接状況や姿勢を判別することができる。そのため本発明の反射形センサーを物品搬送装置の分岐部に設置すると、物品の近接状況や姿勢を判別することができ、物品を円滑に分岐搬送路に移載することができる。
また本発明では、受光素子の数が少なくて足りるから、部品点数が少なく、製造コストが低い。
【0020】
請求項2に記載の発明は、個別発光の際には、各発光素子ごとの発光又はグループごとの発光に対応して、どの発光素子またはグループの発光に基づく受光であるかを個別に識別することが可能であることを特徴とする請求項1に記載の反射形センサーである。
【0021】
本発明の反射形センサーによると、物品の近接状況や姿勢を判別することができる。
【0022】
請求項3に記載の発明は、発光素子は、前記個別発光と、全ての発光素子を一斉に発光させる一斉発光を行うことを特徴とする請求項1又は2に記載の反射形センサーである。
【0023】
本発明の反射形センサーでは、前記した個別発光の他に、全ての発光素子を一斉に発光させる一斉発光を行うこともできる。
一斉発光は、例えば分岐部に物品が存在することを確認するために行われる。即ち前記した個別発光は、発光素子を1個づつまたはグループごとに発光させる動作であるから、全体の光量が少ない。これに対して一斉発光は、より多くの発光素子を発光させるので、光量が多く、誤検知や誤動作が少ない。
また一斉発光を行う場合は、各発光素子の光量も増加しておくことが望ましい。即ち一斉発光を行う場合は、各発光素子に供給する電力を増強しておく。
さらに受光素子の感度も上げておく事が推奨される。例えば、受光素子が発生する電流を増幅して判定に供したり、増幅率を増大させた状態で判定に供することが推奨される。同様に、判定の際の閾値を下げる構成も推奨される。
【0024】
請求項4に記載の発明は、4以上の発光素子と、1個の受光素子とによって構成されることを特徴とする請求項1乃至3のいずれかに記載の反射形センサーである。
【0025】
本発明は、例えば十字状に交差する物品搬送装置に採用する場合に、最も推奨される構成の反射形センサーを示すものである。
【0026】
請求項5に記載の発明は、発光素子は、受光素子を囲む位置に設けられていることを特徴とする請求項1乃至4のいずれかに記載の反射形センサーである。
【0027】
本発明では、発光素子は、受光素子を囲む位置に設けられているので、各発光素子と受光素子の位置関係が均一となる。そのため物品の近接状況や姿勢を判別する際の精度が高い。
【0028】
請求項6に記載の発明は、全ての発光素子と、受光素子との距離が等しいことを特徴とする請求項1乃至5のいずれかに記載の反射形センサーである。
【0029】
本発明の反射形センサーについても、各発光素子と受光素子の位置関係が均一となるため、物品の近接状況や姿勢を判別する際の精度が高い。
【0030】
請求項7に記載の発明は、対象物の位置又は姿勢を判別する判別機能を備えたことを特徴とする請求項1乃至6のいずれかに記載の反射形センサーである。
【0031】
本発明の反射形センサーによると、対象物の位置又は姿勢を判別することができる。
【0032】
請求項8に記載の発明は、物品搬送部を有し、物品搬送部の上に物品を載置して物品を搬送する物品搬送装置において、物品の下部又は上部を目視可能な位置に請求項1乃至7のいずれかに記載の反射形センサーを設置したことを特徴とする物品搬送装置である。
【0033】
本発明の物品搬送装置では、物品の下部又は上部を目視可能な位置に反射形センサーが設けられているから、物品の平面的な位置や姿勢を正確に判別することができる。
【0034】
請求項9に記載の発明は、物品の搬送方向を変更する分岐部を有し、分岐部に前記反射形センサーが設置され、前記反射形センサーによって物品の位置を確認し、物品の位置を修正する位置修正機能を備え、前記位置修正機能によって物品の位置を修正した後に物品を搬送することを特徴とする請求項8に記載の物品搬送装置である。
【0035】
本発明では、分岐部に反射形センサーが設置されているので、分岐部に対する物品の位置や物品の姿勢を認識することができる。そして本発明の物品搬送装置は、物品の位置を修正する位置修正機能を備えているので、位置修正機能によって物品の位置を修正した後に物品を搬送することができる。そのため本発明の物品搬送装置は、分岐部からの移載を円滑に行うことができる。
【0036】
請求項10に記載の発明は、物品に反射部材が設けられており、反射形センサーの発光素子で発光させた光を前記反射部材で反射させ、当該反射光を反射形センサーの受光素子で受光することを特徴とする請求項8又は9に記載の物品搬送装置である。
【0037】
本発明の物品搬送装置では、物品に反射部材が設けられているから、反射率の悪い物品であっても位置や存在を検知することができる。
また反射部材の大きさを適宜選択することにより、物品の位置を確認する精度を上げることができる。
【0038】
請求項11に記載の発明は、物品は搬送用パレットであり、当該搬送用パレットは裏面側に凹部を有し、凹部内に反射部材が設けられていることを特徴とする請求項10に記載の物品搬送装置である。
【0039】
本発明は、反射形センサーを物品搬送部の下側に設けた場合に適する形態を示すものである。本発明の物品搬送装置では、搬送用パレットの裏面に反射部材が設けられている。そしてパレットの裏面に凹部が設けられており、当該凹部に反射部材が設けられている。そのため反射形センサーと物品との間の距離を確保することができ、反射部材で反射した光の受光素子への入射角度を高くすることができる。
【0040】
請求項12に記載の発明は、反射形センサーによって物品の位置を示す2以上の信号と、物品の存在を確認するための信号とが作成されることを特徴とする請求項8乃至11のいずれかに記載の物品搬送装置である。
【0041】
本発明によると、物品の位置と存在を確認することができる。
【0042】
請求項13に記載の発明は、反射形センサーによって物品の位置の確認と、物品の存在確認を行うものであり、発光素子は物品の位置を確認するための発光と、物品の存在確認を行うための発光を個別に行い、物品の存在確認を行うための発光に際して受光素子の感度が高感度に変更されることを特徴とする請求項8乃至12のいずれかに記載の物品搬送装置である。
【0043】
本発明の物品搬送装置によると、反射率の低い物品であっても確実にその存在を確認することができる。
【0044】
請求項14に記載の発明は、複数の物品たる搬送用パレットを有し、搬送パレットには裏面の高さが異なるものが混在することを特徴とする請求項8乃至13のいずれかに記載の物品搬送装置である。
【0045】
本発明は、反射形センサーを物品搬送部の下側に設けた場合に適する形態を示すものである。反射形センサーを物品搬送部の下側に設けた構成を採用する場合、発光素子から発せられた光は、搬送用パレットの裏面で反射することとなる。しかしながら搬送用パレットの色はまちまちであり、黒色の様に反射率の低いものや白色の様に反射率の高いものもある。
この様な場合には、搬送パレットの高さを調節すれば、反射率の違いをある程度補正することができる。例えば、黒色の様な反射率の低いパレットは、裏面の高さを低くし、反射率の高い白色のパレットは、裏面の高さを低くする。その結果、搬送パレットには裏面の高さが異なるものが混在することとなる。
【発明の効果】
【0046】
本発明の物品搬送装置は、物品の位置や姿勢を正確に判定して物品を円滑に分岐搬送路に移載することが可能である。また本発明の反射形センサーによると、物品の位置や姿勢を正確に判定することが可能である。
【図面の簡単な説明】
【0047】
【図1】本発明の実施形態の物品搬送装置の平面図である。
【図2】図1の搬送装置の分解斜視図である。
【図3】本発明の実施形態の反射形センサーの正面図である。
【図4】本発明の実施形態の反射形センサーの制御装置のブロック図である。
【図5】図4に示す反射形センサーの動作を示すタイムチャートである。
【図6】図1の物品搬送装置で使用する搬送用パレットの斜視図である。
【図7】図6の搬送用パレットの断面斜視図である。
【図8】図1の物品搬送装置の各部材の位置関係を模式的に表現した平面図である。
【図9】図1の物品搬送装置の分岐部の正規の位置に物品が停止した状態を模式的に表現した平面図である。
【図10】図9の状態における物品搬送装置の反射形センサーと物品の反射部材との位置関係を模式的に表現した平面図である。
【図11】図10の状態における反射形センサーの動作を示すタイムチャートである。
【図12】図1の物品搬送装置の分岐部の正規の位置よりも進行方向手前の位置に物品が停止した状態を模式的に表現した平面図である。
【図13】図12の状態における物品搬送装置の反射形センサーと物品の反射部材との位置関係を模式的に表現した平面図である。
【図14】図13の状態における反射形センサーの動作を示すタイムチャートである。
【図15】図1の物品搬送装置の分岐部の正規の位置を進行方向に行き過ぎた位置に物品が停止した状態を模式的に表現した平面図である。
【図16】図15の状態における物品搬送装置の反射形センサーと物品の反射部材との位置関係を模式的に表現した平面図である。
【図17】図16の状態における反射形センサーの動作を示すタイムチャートである。
【図18】図1の物品搬送装置の分岐部に、傾斜した姿勢で物品が停止した状態を模式的に表現した平面図である。
【図19】図18の状態における物品搬送装置の反射形センサーと物品の反射部材との位置関係を模式的に表現した平面図である。
【図20】図19の状態における反射形センサーの動作を示すタイムチャートである。
【図21】パレット面での反射と反射部材での反射とを比較説明する説明図である。
【図22】反射形センサーの変形例を示す正面図である。
【図23】反射形センサーの他の変形例を示す正面図である。
【図24】反射形センサーのさらに他の変形例を示す正面図である。
【図25】本発明の変形例における反射形センサーの動作を示すタイムチャートである。
【図26】本発明の他の変形例における反射形センサーの動作を示すタイムチャートである。
【発明を実施するための形態】
【0048】
以下さらに本発明の実施形態について説明する。
本実施形態の物品搬送装置10は、実際に物品を載置して搬送する機械構造部14と、分岐部2において物品1の位置と姿勢を検出する反射形センサー12等の電気構造部を有している。
機械構造部14は公知の構成であるから、反射形センサー12等の説明に先立って機械構造部14の構成と作用について説明する。
本実施形態の物品搬送装置10の機械構造部14は、分岐部2を有するローラコンベア装置である。
【0049】
本実施形態の物品搬送装置1の機械構造部14は、主搬送路5と分岐搬送路3,6とが十字状に交差している。
即ち機械構造部14は、図面上下方向に延びる主搬送路5を有している。主搬送路5は、ローラ8が平行に多数並べて設けられたものである。主搬送路5を構成するローラ8は、図示しないモータによって回転される。主搬送路5は、ローラ8の表面に物品1を載置し、図示しないモータでローラ8を回転することによって、図面の矢印の様に図面下側から上方向に向かって物品を搬送するものである。
本実施形態の物品搬送装置1では、主搬送路5の中途に分岐部2が設けられており、当該分岐部2に二つの分岐搬送路3,6が設けられている。ここで分岐搬送路3は、分岐部2を起点として図面右側に延びる搬送路である。一方、分岐搬送路6は、分岐部2を起点として図面左側に延びる搬送路である。分岐搬送路3,6には、いずれもローラ9が並行に並べて配されており、当該ローラ9は、図示しないモータによって回転する。
【0050】
分岐部2には、移載装置11と反射形センサー12(本体部25)とが設けられている。
移載装置11は、図2の様に主搬送側走行装置15と、排出用走行装置16によって構成されている。主搬送側走行装置15は、4本のローラ17を有している。4本のローラ17は、いずれも図示しないモータによって回転されるものであり、前記した主搬送路5のローラ8と平行に並べられている。
また主搬送側走行装置15は、図示しない昇降装置に取り付けられており、主搬送側走行装置15の4本のローラ17は図示しない昇降装置によって一体的に昇降する。
【0051】
排出用走行装置16は、3列の短冊状部材20,21,22によって構成されている。短冊状部材20,21,22にはいずれも短尺のローラ23が4本平行に設けられている。排出用走行装置16の各ローラ23の軸線は、前記した主搬送側走行装置15のローラ17の軸線と直交する。
排出用走行装置16の各ローラ23についても、図示しないモータによって回転する。排出用走行装置16の各ローラ23同士の間には、自由回転する球状コロ24が設けられている。
前記した3列の短冊状部材20,21,22の内、中央に設けられた短冊状部材21には、中央に開口27が設けられている。当該開口27は、移載装置11の中心に位置している。
前記した3列の短冊状部材20,21,22は、主搬送側走行装置15の4本のローラ17の間部分に納まっている。
排出用走行装置16についても図示しない昇降装置に接続されており、3列の短冊状部材20,21,22は、当該昇降装置によって一体的に昇降する。
【0052】
前記した様に、移載装置11の主搬送側走行装置15と排出用走行装置16は、図示しない昇降装置によって昇降するが、主搬送側走行装置15が上昇位置にあり、排出用走行装置16が降下位置にある場合は、主搬送側走行装置15のローラ17が排出用走行装置16のローラ23及び球状コロ24よりも上側に突出する。
一方、排出用走行装置16が上昇位置にあり、主搬送側走行装置15が降下位置にある場合は、排出用走行装置16の短冊状部材20,21,22が、主搬送側走行装置15のローラ17同士の間から上昇し、排出用走行装置16のローラ23及び球状コロ24が主搬送側走行装置15のローラ17よりも上側に突出する。
【0053】
本実施形態の機械構造部14は、前記した様に、物品1を主搬送路5に載せて図面下側から上側に向かって搬送することができる。
物品1を直進させて分岐部2をそのまま通過させる場合には、移載装置11の主搬送側走行装置15を上昇させ、排出用走行装置16を降下させる。その結果、物品1は主搬送側走行装置15の上を通過して下流側に搬送される。
【0054】
一方、物品1を分岐搬送路3,6に排出したい場合は、物品1を一旦分岐部2で停止し、排出用走行装置16を上昇させて排出用走行装置16のローラ23に物品1を載置する。そして排出用走行装置16のローラ23を回転し、物品1を図面横方向に移動させて物品1を分岐搬送路3,6のいずれかに受け渡す。
【0055】
次に反射形センサー12等の電気構造部について説明する。
反射形センサー12は、本体部25と制御装置26(図4)によって構成されている。反射形センサー12の本体部25は、図3の様に基板30に4個の発光素子31a,b,c,dと、1個の受光素子32及び4個のパイロットランプ33a,b,c,dが取り付けられたものである。
4個の発光素子31a,b,c,dは、いずれも発光ダイオードである。パイロットランプ33a,b,c,dについても発光ダイオードが使用されている。
受光素子32は、硫化カドミウムセル(CdSセル)やフォトダイオード等の光を受けて光を受けて電気抵抗が変わる素子や、光を受けて電気を発生させる素子が使用されている。
本実施形態では、基板30の形状は正方形である。また基板の大きさは、30mm四方から100mm四方程度の大きさである。
本実施形態では、40mm四方から60mm四方の基板が採用されている。
【0056】
反射形センサー12の本体部25は、前記した正方形の基板30の表面に前記した4個の発光素子31a,b,c,dと、1個の受光素子32及び4個のパイロットランプ33a,b,c,dを取り付けられたものである。なお前記した4個の発光素子31a,b,c,dと、1個の受光素子32及び4個のパイロットランプ33a,b,c,dはいずれも基板30の表面から露出している。
【0057】
ここで4個の発光素子31a,b,c,dと、1個の受光素子32の配置に注目すると、4個の発光素子31a,b,c,dは、受光素子32を中心とする円上に等間隔に配列されている。即ち4個の発光素子31a,b,c,dは、受光素子32を取り囲む位置にあり、各発光素子31a,b,c,dと受光素子32との間の距離は等しい。
また本実施形態では、4個の発光素子31a,b,c,dは、正方形基板30の各辺に面した位置に配されている。即ち4個の発光素子31a,b,c,dの内、隣接する位置の発光素子31a,b,c,d同士を結ぶ直線は、基板30のそれぞれの角に面する。
より具体的には、図3の様に、発光素子31aと31bを結ぶA−Bライン、発光素子31bと31cを結ぶB−Cライン、発光素子31cと31dを結ぶC−Dライン、発光素子31dと31aを結ぶD−Aラインは、共に基板30の各角に面する。
【0058】
パイロットランプ33a,b,c,dは、前記した4個の発光素子31a,b,c,dの配列と相似形であってかつ小型に配列され、基板30の脇の部分に設置されている。
【0059】
反射形センサー12の制御装置26は、図4に示す様にCPUを有し、さらに周辺回路として増幅切替回路と、中心認識用コンパレータと、在荷認識用コンパレータを備えている。
CPUに対する入力信号として、前記した中心認識用コンパレータの信号と、在荷認識用コンパレータの信号がある。
中心認識用コンパレータ及び在荷認識用コンパレータは、受光素子32から出力された信号が一定の閾値以上であるか否かを判断するものである。即ち中心認識用コンパレータ及び在荷認識用コンパレータは、基準電圧(閾値)と受光素子32から出力された信号電圧とを比較し、信号電圧の方が高い場合にはON信号を発信する。なお本実施形態では、中心認識用コンパレータの閾値が在荷認識用コンパレータの閾値よりも高い。
【0060】
中心認識用コンパレータ及び在荷認識用コンパレータには、受光素子32から出力された信号が、増幅回路(増幅切替回路)を経て入力される。そして増幅後の信号強度が、所定の閾値を越えていれば、前記した様に中心認識用コンパレータ又は在荷認識用コンパレータからCPUにON信号が発信される。
【0061】
またCPUからは、各発光素子31a,b,c,dを発光させるための起動信号が発信される。当該信号は、パルス的な信号であり、後記する様に、各発光素子31a,b,c,dを順次パルス的に発光させる個別発光信号と、各発光素子31a,b,c,dを同時に発光させる一斉発光がある。本実施形態では、発光素子31a,b,c,dを順次発光させ、これに続いて各発光素子31a,b,c,dを同時に発光させ、さらに続いて発光素子31a,b,c,dを順次発光させる動作を繰り返す様にプログラムされている。
【0062】
さらにCPUから増幅切替回路に対して切替信号が発信される。切替信号は、増幅回路(増幅切替回路)の増幅率を変更する信号である。後記する様に本実施形態の反射形センサー12は、物品の中心位置を測定する機能と、物品の存在を確認する機能を有しており、前者の物品の中心位置を測定する際には、増幅回路(増幅切替回路)の増幅率が押さえられ、前者の物品の存在を確認する際には、高い増幅率に設定される。
より具体的には、個別発光の際には低い増幅率となり、一斉発光の際には高い増幅率となる様にプログラムされている。
【0063】
またCPUからは、演算結果として、各発光素子31a,b,c,dごとに受光記録が出力される。即ちCPUが、いずれの発光素子31a,b,c,dから照射された光を受光したものかを判断し、CPUからいずれの発光素子31a,b,c,dから照射された光を受光したものかを示す信号が個別に出力される。
この信号は、図4では、「中心認識出力」と表記されている。さらに物品の存在を確認する信号が出力される。この信号は、一斉発光が行われた際に、受光素子が受光信号を発した場合にON出力される。
【0064】
次に反射形センサー12の機能について説明する。
本実施形態の反射形センサー12では、図5のタイムチャートの様に、発光素子31a,b,c,dを順番に短時間だけ発光し、それに続いて発光素子31a,b,c,dの全てを一斉に短時間だけ発光させる。
即ちCPUから、発光素子31aを発光させる信号が短時間だけ発信される。そして発光素子31aが消灯した後、しばらく時間を空けて次の発光素子31bを発光させる信号が短時間だけ発信される。さらに発光素子31bが消灯した後、しばらく間を空けて次の発光素子31cを発光させる信号が短時間だけ発信される。さらに発光素子31cが消灯した後、しばらく間を空けて次の発光素子31dを発光させる信号が短時間だけ発信される。
そして発光素子31a,b,c,dの個別の発光が終了すると、しばらく間を空けて発光素子31a,b,c,dを一斉に発光させる。
【0065】
各発光素子31a,b,c,dの発光時間及び間隔は、1msec〜30msec程度の短い時間であり、パルス的な発光である。
【0066】
また各発光素子31a,b,c,dを発光させるのと同時に、受光素子32が受光を受け入れる。そして受光素子32が光を受光すると、受光素子32が発信した信号が増幅回路(増幅切替回路)で増幅され、さらに中心認識用コンパレータ又は在荷認識用コンパレータに送信される。
ここで、発光素子31a,b,c,dを順番に短時間だけ発光させる個別発光の段階では、CPUから増幅回路(増幅切替回路)に対して低増幅率を選択する信号(図5では、増幅切替信号OFF)が発信される。またコンパレータは、中心認識用コンパレータが選択される。
【0067】
その結果、受光素子32が発信する受光信号は、増幅回路(増幅切替回路)において低い増幅率で増幅され、さらに中心認識用コンパレータにおいて高い閾値でON,OFF選択の判断がなされる。
そしてこのON,OFF信号がCPUに送られる。CPUでは、発光素子31a,b,c,dの発光のタイミングと、受光素子32からの信号発信のタイミングを考慮して、今回のON信号がいずれの発光素子31a,b,c,dの発光に起因するものであるかを判別する。
【0068】
これを図5のタイムチャートに基づいて説明すると次の通りである。
図5に示すタイムチャートでは、「通常パレット」と表示されている期間は、通常色のパレットが反射形センサー12の上部を通過し、「通常パレット」と表示されている期間は、反射率の低い黒色のパレットが反射形センサー12の上部を通過している。また「リフレクタ」と表示されている期間は、後記する反射部材45が反射形センサー12の上部を通過しているものとする。
【0069】
タイムチャートの上段の「投光LEDa,b,c,d」は、CPUから発光素子(正確にはスイッチング回路)に対して発信される信号である。この信号がONの時には、発光素子31a,b,c,dが発光していることとなる。
一方、「受光素子出力」は、受光素子出力の出力を表している。前記した様に発光素子31a,b,c,dは順番に短時間だけ発光するから、発光素子31a,b,c,dが発光すると、周囲が明るくなり、受光素子32は、その光を関知して受光量に応じた電圧を出力する。
しかしながら、発光素子31a,b,c,dの発光が、物に反射して受光素子32に直接入射される場合と、光の散乱によって受光素子32に間接的に入射される場合とでは、おのずと光量が異なるから、物に反射して受光素子32に入射した場合の信号強度(電圧)は、散乱光による場合に比べて高い。
【0070】
フローチャートに準じて説明すると、一回の個別発光及び一斉発光を見たとき、発光素子31a,b,c,dの発光に応じて、受光素子32から5回(5山)受光信号が出るが、最初の信号は弱く(山が低く)、次の2回は、強く(山が高く)、さらに続くは弱く(山が低く)、最後の信号は強い(山が高い)。
【0071】
これは、2回目、3回目、5回目の発光の際は、物に発光した反射光を受講素子32が直接的に受光したものであり、1回目と4回目は、散乱光を受光したものであることを示している。
そのため中心認識用コンパレータは、この強い信号が出た場合だけを選別し、ON信号をCPUに送る。
CPUでは、強い信号が出た時期と、自らが「投光LEDa,b,c,d」を発光素子31a,b,c,d側に発信した時期を比較し、ON信号がいずれの発光素子31a,b,c,dの発光に起因するものであるかを判別する。
より具体的に説明すると、「投光LEDa,b,c,d」のタイムチャートと、「受光素子出力」のタイムチャートを比較し、「受光素子出力」が高出力であって、「投光LEDa,b,c,d」がONである発光素子31a,b,c,dを選び、その発光素子a,b,c,dに該当する「中心認識出力」をONにする。
また「受光素子出力」が高出力であって、全ての「投光LEDa,b,c,d」がONである場合には、在荷認識出力をONにする。
【0072】
判別の結果は、それぞれ個別に出力されるが、判別の結果受光素子32からの信号がONであった場合の信号は、CPU内で一時的に自己保持され、タイムチャートの様に一定時間に渡ってONの状態が続く。
またCPU内から出力された判別信号は、反射形センサー12の本体部25に発信され、対応するパイロットランプ33a,b,c,dが点灯する。前記した様に、発光素子31a,b,c,dの発光時間は、極めて短いので、肉眼によって発光を確認することができないが、判別の結果、CPUが発信される信号は、自己保持されていて一定時間に渡って出力され続けるので、パイロットランプ33a,b,c,dは暫くの時間点灯し、肉眼でも確認することができる。
【0073】
個別発光に続いて各発光素子31a,b,c,dを同時に発光させる一斉発光が行われる。一斉発光の際には、CPUから増幅回路(増幅切替回路)に対して高増幅率を選択する信号(図5では、増幅切替信号ON)が発信される。またコンパレータは、在荷認識用コンパレータが選択される。
【0074】
その結果、受光素子32が発信する受光信号は、増幅回路(増幅切替回路)において高い増幅率で増幅され、さらに在荷認識用コンパレータにおいて低い閾値でON,OFF選択の判断がなされる。
そしてこのON,OFF信号がCPUに送られる。一斉発光に起因するON,OFF信号は、CPUを経由して外部に出力されるが、受光素子32からの信号がONであった場合の信号は、CPU内で一時的に自己保持され、タイムチャートの様に一定時間に渡ってONの状態が続く。
【0075】
例えば反射率の低い黒色のパレットが物品であった場合、物品から反射される光が弱いから、図5のタイムチャートの後半の様に一斉発光しても、受光素子から出力される電圧は低い。しかしながら本実施形態では、一斉発光の際には、受光素子32が発信する受光信号は、増幅回路(増幅切替回路)において高い増幅率で増幅され、さらに在荷認識用コンパレータにおいて低い閾値でON,OFF選択の判断がなされるので受光素子の感度が高感度に変更されており、存荷認識出力がONとなる。
【0076】
次に反射形センサー12と機械構造部14との関係について説明する。本実施形態の物品搬送装置10では、反射形センサー12の本体部25が機械構造部14の分岐部2の中心に配置されている。即ち本実施形態で採用する機械構造部14は、主搬送路5と分岐搬送路3,6とが十字状に交差するので、分岐部2の形状は、図1の様に正方形となる。そして分岐部2には、前記した様に移載装置11が設けられているが、移載装置11の中央の短冊状部材21に開口27が設けられており、当該開口27を臨む位置に反射形センサー12の本体部25が設けられている。
【0077】
前記した様に開口27は、移載装置11の中心にあるから、反射形センサー12の本体部25は、移載装置11の中心に設けられ、さらにこの位置は分岐部2の中心位置でもある。
物品1は、前記した様に主搬送側走行装置15又は排出用走行装置16に載置されて運搬されるから、開口27から上を見上げると、物品1の下部が直接見える。即ち反射形センサー12の本体部25は、物品1の下部を目視可能な位置に設置されている。
従って開口27から上を見上げると、物品1の平面的な位置が分かり、物品1が、分岐部2に対してどの様な位置関係にあり、かつどの様な姿勢であるかを判断することができる。
【0078】
また反射形センサー12の本体部25は、正方形の分岐部2に対して90度傾斜した姿勢で取り付けられている。即ち前記した様に反射形センサー12の本体部25は正方形であり、4個の発光素子31a,b,c,dは、正方形基板30の各辺に面した位置に配されている。これに対して反射形センサー12の本体部25は、分岐部2に対して90度傾斜した姿勢で取り付けられているから、4個の発光素子31a,b,c,dは、図8の様に正方形の分岐部2の各角に面した位置に配される。
そのため隣接する発光素子31同士を結ぶ直線は、いずれも分岐部2の各辺と平行となる。
具体的には、発光素子31aと31bを結ぶA−Bライン、発光素子31bと31cを結ぶB−Cライン、発光素子31cと31dを結ぶC−Dライン、発光素子31dと31aを結ぶD−Aラインは、共に分岐部2の各辺と平行となる。
【0079】
即ち発光素子31aと31bを結ぶA−Bラインは、分岐部2と主搬送路5の上流側(物品1の搬送方向の上流側)との境界線と平行である。発光素子31bと31cを結ぶB−Cラインは、分岐部2と図面左側の分岐搬送路6との境界線と平行である。発光素子31cと31dを結ぶC−Dラインは、分岐部2と主搬送路5の上流側(物品1の搬送方向の下流側)との境界線と平行である。発光素子31dと31aを結ぶD−Aラインは、分岐部2と図面右側の分岐搬送路3との境界線と平行である。
【0080】
次に本実施形態の物品搬送装置10の全体的な動作について説明する。
本実施形態では、搬送物を図6,7の様なパレット35に載置して搬送する。そのため本実施形態では、反射形センサー12にパレット35を物品1として認識させる。
パレット35は、樹脂又は金属で作られた高さの低い筐体である。パレット35は、天板36とそれに繋がる4つの側壁37,38,39,40を有している。パレット35では、底の部分は開放されており、図7の様に天板36の下には空間41がある。
そして本実施形態では、天板36の裏の中心に反射部材45が設けられている。反射部材45は、物品1の他の部分よりも反射率が高い部材である。即ち反射部材45は、金属板や金属箔等の反射率が高い部材であり、本実施形態では、アルミ箔が使用されている。
【0081】
反射部材45は、実際には、前記した反射形センサー12の本体部25の大きさと大差ないものであり、50mm四方程度の大きさである。これに対してパレット35は実際には1000mm四方程度の大きさであるが、理解を容易にするために、図面では、反射部材45の大きさを大きく描いている。
【0082】
以下、図8に示す物品搬送装置10を基準として説明する。なお図8は、物品搬送装置10の動作説明のために作図されたものであり、分岐部2の周辺を図示したものであるが、移載装置11の図示は省略している。
また以下の説明では、物品1を主搬送路5に載置して図面下側から上に向かって搬送し、一旦分岐部2で停止して、排出用走行装置16を上昇させて排出用走行装置16のローラ23に物品1を載置し、物品1を図面右方向に移動させて物品1を分岐搬送路3に受け渡すことを想定している。
【0083】
前記した様に、物品1を図面右方向に移動させて物品1を分岐搬送路3に受け渡すには、図9に示すように、分岐部2の中央に物品1が停止してることが大切である。
【0084】
即ち図9は、正規の位置に物品1(パレット35)が停止した状態を模式的に表現した平面図であるが、この時のパレット35の裏面に貼られた反射部材45と、反射形センサー12の本体部25との関係は、図10の通りである。即ちパレット35が分岐部2の中央にある場合は、反射形センサー12の本体部25の真上の位置に反射部材45がある。
そしてこの状態で、本体部25の発光素子31a,b,c,dが個別発光及び一斉発光を繰り返す。
個別発光の段階においては、図11のタイムチャートの様に、本体部25の発光素子31a,b,c,dが順次短時間づつ発光する。ここで本体部25の真上の位置には、反射部材45があるから、いずれの発光素子31a,b,c,dが発光しても、その反射光は、中央の受光素子32に入光される。
【0085】
そのため個別発光によって発光素子31a,b,c,dが順次発光すると、この光は、それぞれ受光素子32に入光され、図11のタイムチャートの「受光素子出力」のグラフの様に、受光素子32がそれぞれの発光タイミングに呼応して受光信号を発信する。この受光信号は、増幅回路(増幅切替回路)を経て中心認識用コンパレータに入力され、中心認識用コンパレータでON信号が生成される。そしてこのON信号は、CPUに送られて、発光素子31a,b,c,dの発光のタイミングと、受光素子32からの信号発信のタイミングを考慮して、今回のON,OFF信号がいずれの発光素子31a,b,c,dの発光に起因するものであるかが判定され、結果的に全ての発光素子31a,b,c,dからの発光が受光されたことが確認される。
即ち図11のタイムチャートの様に、中心認識出力a,b,c,dが全てONとなる。
なお一斉発光の際にも受光素子32に光か入射されるので、在荷認識信号もONとなり、分岐部2上に物品1(パレット35)が存在することが再確認される。
【0086】
本実施形態では、反射形センサー12の本体部25は、個別発光と一斉発光とを常時繰り返しているから、逆に、CPUからの出力パターンが、図11に示す様に、中心認識出力a,b,c,dが全てONとなる状態を呈すれば、物品1(パレット35)の中心と、分岐部2とが一致したことが分かる。そのため、CPUからの出力パターンが、中心認識出力a,b,c,dが全てONとなる状態となったことを確認して、移載装置11を動作させれば、物品1(パレット35)が他の部材と衝突することはない。
またCPUからの出力パターンが、中心認識出力a,b,c,dが全てONとなる状態となっていなければ、移載装置11の主搬送側走行装置15を正方向または逆方向に駆動し、物品1(パレット35)を微調整して物品1(パレット35)の中心と、分岐部2の中心とを一致させる。本実施形態の物品搬送装置10では、移載装置11に物品1(パレット35)が乗って主搬送側走行装置15を停止させた際に、CPUからの出力パターンが、中心認識出力a,b,c,dが全てONとなる状態となっていなければ、自動的に主搬送側走行装置15が正方向または逆方向に駆動し、物品1(パレット35)の位置が微調整される。
【0087】
例えば、図12の様に、物品1が、分岐部2の中央に至るまでの間で停止してしまった場合を想定すると、CPUからの出力パターンは、図14の様に、中心認識出力a,b,がONで、中心認識出力c,dがOFFとなる。
【0088】
即ち物品1が、分岐部2の中央に至るまでの間で停止してしまった場合における反射部材45と、反射形センサー12の本体部25との関係は、図13の様であり、反射部材45は、発光素子31aと31bを結ぶA−Bラインを越えているが、発光素子31cと31dを結ぶC−Dラインには達していない。そのため発光素子31a及び31bが発光した光は、受光素子32に入光されるが、発光素子31c,31dが発光した光は受光素子32に入光されず、中心認識出力a,bがONで、中心認識出力c,dがOFFとなる。
そのため図14の出力パターンの様に、中心認識出力a,bがONで、中心認識出力c,dがOFFとなった場合は、移載装置11の主搬送側走行装置15を僅かに前進方向に移動させ、物品1(パレット35)を前進させて物品1(パレット35)を中央に寄せる。そしてCPUからの出力パターンが、中心認識出力a,b,c,dが全てONとなる状態に変化すると、移載装置11を動作させ、物品1を分岐搬送路3側に排出する。
【0089】
また図15に示すように、物品1が、分岐部2の中央を行き過ぎてしまった場合は、CPUからの出力パターンは、図17の様に、中心認識出力c,dがONで、中心認識出力a,bがOFFとなる。
【0090】
即ち物品1が、分岐部2を行き過ぎてしまった場合における反射部材45と、反射形センサー12の本体部25との関係は、図16の様であり、反射部材45は、発光素子31cと発光素子31dを結ぶC−Dラインの上にあるものの、発光素子31aと発光素子31bを結ぶA−Bラインは越え去ってしまっている。そのため発光素子31cと発光素子31dが発光した光は、受光素子32に入光されるが、発光素子31aと発光素子31bが発光した光は受光素子32に入光されず、中心認識出力c,dがONで、中心認識出力a,bがOFFとなる。
【0091】
そのため図17の出力パターンの様に、中心認識出力c,dがONで、中心認識出力a,bがOFFとなった場合は、移載装置11の主搬送側走行装置15を僅かに後退方向に移動させ、物品1(パレット35)を後退させて中央に寄せる。そしてCPUからの出力パターンが、中心認識出力a,b,c,dが全てONとなる状態に変化すると、移載装置11を動作させ、物品1を分岐搬送路3側に排出する。
【0092】
また図18に示す様に、物品1が傾斜した姿勢で分岐部2に入った場合は、CPUからの出力パターンは、図20の様に、中心認識出力dだけがONで、他の中心認識出力a,b,cがOFFとなる。
即ち物品1が、図18の様な姿勢で分岐部2に入った場合における反射部材45と、反射形センサー12の本体部25との関係は、図19の様であり、反射部材45は、発光素子31dだけに掛かり、他の発光素子31a,b,cからは外れている。そのため発光素子31dが発光した光は、受光素子32に入光されるが、他の発光素子31a,b,cが発光した光は受光素子32に入光されず、中心認識出力dだけがONで、中心認識出力a,b,cがOFFとなる。
そのため図20の出力パターンの様に、中心認識出力dがONで、中心認識出力a,b,cがOFFとなる。
【0093】
本実施形態の物品搬送装置10では、図18に示す様な姿勢で分岐部2に入った場合の修正を自動的に行うことはできず、何らかの警報を発して作業者に注意を喚起し、人力によって姿勢を修正することとなる。
【0094】
本実施形態では、前記した個別発光だけでなく、一斉発光も行われる。前述した様に個別発光は、物品1の中心位置を所定の位置に合わせるために使用される。これに対して一斉発光は、単に、分岐部2上に物品1が存在するか否かの確認に使用される。
前記した個別発光の際には、物品1の中心位置を分岐部2の中心位置に正確に合致させるため、反射部材45を反射ターゲットとし、他の部材からの反射は、極力ノイズとして除去できる様に工夫している。即ち前記した様に個別発光の際には、受光素子32が発信する受光信号は、低い増幅率で増幅され、さらに中心認識用コンパレータにおいて高い閾値でON,OFF選択の判断がなされる。
【0095】
これに対して、単に分岐部2上に何らかの物が存在するか否かを確認する場合は。反射部材45だけでなく、物品1のいずれか一部からの反射もノイズとして除外するべきではない。そのため単に分岐部2上に何らかの物が存在するか否かを確認する場合には、物品1の一部からでもより強い反射光を得るべきである。また単に分岐部2上に何らかの物が存在するか否かを確認する場合には、受光素子32の感度についてもより高めておく必要がある。
【0096】
そのため本実施形態では、単に分岐部2上に何らかの物が存在するか否かを確認するために、発光素子31a,b,c,dを一斉発光させる。そして一斉発光に対応してCPUから増幅切替信号ONの信号が発信される。またコンパレータは、在荷認識用コンパレータが選択される。
その結果、受光素子32が発信する受光信号は、増幅回路(増幅切替回路)において高い増幅率で増幅され、さらに中心認識用コンパレータにおいて低い閾値でON,OFF選択の判断がなされる。
【0097】
また一斉発光に際しては、全ての発光素子31a,b,c,dが発光するので、光り量そのそものが多い。この様に、一斉発光に際しては、発光量が多く、増幅率が高く、かつ閾値が小さいので、物品の有無を確実に検知することができる。本実施形態の物品搬送装置10では、上記した様な工夫がなされているので、例えばパレット35の色が黒や灰色といった光を反射しにくい色であっても、分岐部2上にパレット35が存在することを認識することができる。
【0098】
以上説明した実施形態では、パレット35の形状として天板36とそれに繋がる4つの側壁37,38,39,40を有した形状を採用し、天板36の裏に反射部材45が設けた。即ちパレット35の裏面に凹部を設け、反射部材45の取付け位置を反射形センサー12の本体部25から離した。この構成は、中心位置を検知する際の正確性を向上させる効果があり、推奨される構成である。
即ちパレット35が主搬送路5に載置されて搬送され、分岐部2に差しかかった状態を想定すると、まず最初にパレット35のいずれかの側壁37,38,39,40の下面が、反射形センサー12の本体部25の上を通過する。
そして前記した様に、本実施形態では、反射形センサー12は、個別発光と一斉発光とを常時繰り返しているから、個別発光の光が側壁37,38,39,40の下面で反射されて受光素子32に入光してしまう懸念がある。この様な誤検知は、パレット35を金属の様な反射し易い素材で製作した場合に強く懸念される。
【0099】
しかしながら、本実施形態では、反射部材45の取付け位置が、パレット35の側壁37,38,39,40の下面よりも高い位置にあるので、この様な誤検知は起こりにくい。
即ち図21の様に、発光素子(投光LED)31から発光された光が受光素子32に入光する経路を考えると、反射部材45によって反射される光が受光素子32に入光する場合における発光素子(投光LED)31からの輻射角度X及び入射角度Xは、パレット35の側壁37,38,39,40によって反射される光が受光素子32に入光する場合における輻射角度Y及び入射角度Yに比べて小さい。そのため発光素子(投光LED)31の光量が一定でかつ、反射部材45とパレット35の側壁37,38,39,40の下面の反射率が同一であるならば、反射部材45によって反射される光の方が、パレット35によって反射される光に比べて格段に強い。
【0100】
ましてや現実には、反射部材45の反射率は、パレット35の側壁37,38,39,40に比べて格段に高いので、反射部材45によって反射される光の方が、パレット35によって反射される光に比べて格段に強い。
そのため中心認識用コンパレータの閾値や、増幅切替回路の増幅率を適宜選定することによって、前記した側壁37,38,39,40の下面からの反射をノイズとして除外することができ、誤検知を未然に防止することができる。
【0101】
前記した実施形態では、パレット35の裏面に凹部を設け、反射部材45の取付け位置を反射形センサー12の本体部25から離したが、反射部材45と反射形センサー12との距離は、パレット35の色や、反射部材45の素材によって変わるものであり、実地の調整によって定められる。そのため裏面の高さが異なるパレット35が混在することもある。
【0102】
以上説明した実施形態では、個別発光の際に、発光素子31a,b,c,dを左回りに順次発光させたが、発光の順番は任意である。また各発光素子31a,b,c,dをランダムに発光させてもよい。
【0103】
以上説明した実施形態では、発光素子31を4個設け、受光素子32を1個設けた構成を例示したが、発光素子31の数は、3個以上であればよい。また受光素子の数は2以上であってもよいが、発光素子31の数よりも多くすることは無駄であり、また受光素子32の数は、発光素子31の数よりも少ないことが必要である。
【0104】
図22は、発光素子31を3個設けて正三角形の位置に配し、その中心に受光素子32を1個設けた例を示している。
また図23は、発光素子31を多数設けて円形に配し、その中心に受光素子32を1個設けた例を示している。
また図24は、発光素子31を多数設けて行列状に配し、その中心に受光素子32を1個設けた例を示している。
【0105】
図23、図24の様に発光素子31を多数個設ける場合は、発光素子31をグループ分けしてグループごとに発光させてもよい。
例えば、図24に示す反射形センサーでは、イ−イ列、ロ−ロ列という様に列ごとにグループ分けしたり、へ−へ行、ト−ト行という様に行ごとにグループ分けし、個別発光の際にグループに属する発光素子31を一斉に発光させてもよい。
【0106】
また先の実施形態では、個別発光の際の発光素子31の発光は、各回ごとに一パルスであったが、図25に示す様に、各回ごとに複数パルス発光させてもよい。図25に示す実施形態では、各回ごとに3パルス発光させ、さらに最後のパルスは、他の2回に比べて時間が発光時間が短い。
【0107】
また先の実施形態では、4個の発光素子31a,b,c,dを順次個別に発光させた後に、一斉発光を行ったが、発光素子31aの発光の後に一斉発光を行い、さらに次の発光素子31bを発光させた後に一斉発光を行うという様に、個別発光と一斉発光とを並行的に実行してもよい。
【0108】
前記した実施形態では、個別発光の際には、発光素子31a,b,c,dが間隔を空けて発光する。即ちいずれの発光素子31a,b,c,dも発光しない時間を故意に作っている。しかしながらこの構成は必須ではなく、一つの発光素子31aが発光中に次の発光素子31bの発光を開始してもよい。即ち図26に示すタイムチャートの様に複数の発光素子31が同時に発光しているタイミングが存在してもかまわない。要するにただ一つ、又は一グループに属する発光素子だけが発光しているタイミングを作ることができれば足りる。
この構成を採用する場合は、ただ一つ、又は一グループに属する発光素子31だけが発光した際の受光素子の信号をもってどの発光素子31a,b,c,dの光を受光したのかを判定する。
【0109】
上記した実施形態では、隣接する発光素子31同士を結ぶラインを分岐部2の各辺と平行となる様に配置した。この構成は、物品1が正しい姿勢で分岐部2に近接する際、いずれの方向から近接しても、同時に2個の発光素子31からの光を反射することとなり、近接の判定や姿勢の分析が正確に行えるという利点がある。
しかしながら本発明は、この構成に限定されるものではなく、発光素子31を分岐部2の角に面した位置に配置してもよい。
【0110】
本発明の反射形センサーは、物品搬送装置の分岐部に設置することを目的として開発された経緯があるが、反射形センサーの用途は、物品搬送装置に限定されるものではない。例えば人や動物の接近を検知する用途にも本発明の反射形センサーを利用することができる。
【符号の説明】
【0111】
1 物品
2 分岐部
3 分岐搬送路
5 主搬送路
6 分岐搬送路
8 ローラ
9 ローラ
10 物品搬送装置
11 移載装置
12 反射形センサー
15 主搬送側走行装置
16 排出用走行装置
17 ローラ
20,21,22 短冊状部材
23 ローラ
25 反射形センサーの本体部
26 制御装置
27 開口
30 基板
31a,b,c,d 発光素子
32 受光素子
33a,b,c,d パイロットランプ
35 パレット
36 天板
41 空間
45 反射部材
【特許請求の範囲】
【請求項1】
3以上の発光素子と、発光素子の個数よりも少ない個数の受光素子とを備え、発光素子を1個づつまたはグループごとにパルス的に発光させる個別発光を実行し、前記発光素子で発光させた光を対象物で反射させ、当該反射光を前記受光素子で受光することを特徴とする反射形センサー。
【請求項2】
個別発光の際には、各発光素子ごとの発光又はグループごとの発光に対応して、どの発光素子またはグループの発光に基づく受光であるかを個別に識別することが可能であることを特徴とする請求項1に記載の反射形センサー。
【請求項3】
発光素子は、前記個別発光と、全ての発光素子を一斉に発光させる一斉発光を行うことを特徴とする請求項1又は2に記載の反射形センサー。
【請求項4】
4以上の発光素子と、1個の受光素子とによって構成されることを特徴とする請求項1乃至3のいずれかに記載の反射形センサー。
【請求項5】
発光素子は、受光素子を囲む位置に設けられていることを特徴とする請求項1乃至4のいずれかに記載の反射形センサー。
【請求項6】
全ての発光素子と、受光素子との距離が等しいことを特徴とする請求項1乃至5のいずれかに記載の反射形センサー。
【請求項7】
対象物の位置又は姿勢を判別する判別機能を備えたことを特徴とする請求項1乃至6のいずれかに記載の反射形センサー。
【請求項8】
物品搬送部を有し、物品搬送部の上に物品を載置して物品を搬送する物品搬送装置において、物品の下部又は上部を目視可能な位置に請求項1乃至7のいずれかに記載の反射形センサーを設置したことを特徴とする物品搬送装置。
【請求項9】
物品の搬送方向を変更する分岐部を有し、分岐部に前記反射形センサーが設置され、前記反射形センサーによって物品の位置を確認し、物品の位置を修正する位置修正機能を備え、前記位置修正機能によって物品の位置を修正した後に物品を搬送することを特徴とする請求項8に記載の物品搬送装置。
【請求項10】
物品に反射部材が設けられており、反射形センサーの発光素子で発光させた光を前記反射部材で反射させ、当該反射光を反射形センサーの受光素子で受光することを特徴とする請求項8又は9に記載の物品搬送装置。
【請求項11】
物品は搬送用パレットであり、当該搬送用パレットは裏面側に凹部を有し、凹部内に反射部材が設けられていることを特徴とする請求項10に記載の物品搬送装置。
【請求項12】
反射形センサーによって物品の位置を示す2以上の信号と、物品の存在を確認するための信号とが作成されることを特徴とする請求項8乃至11のいずれかに記載の物品搬送装置。
【請求項13】
反射形センサーによって物品の位置の確認と、物品の存在確認を行うものであり、発光素子は物品の位置を確認するための発光と、物品の存在確認を行うための発光を個別に行い、物品の存在確認を行うための発光に際して受光素子の感度が高感度に変更されることを特徴とする請求項8乃至12のいずれかに記載の物品搬送装置。
【請求項14】
複数の物品たる搬送用パレットを有し、搬送パレットには裏面の高さが異なるものが混在することを特徴とする請求項8乃至13のいずれかに記載の物品搬送装置。
【請求項1】
3以上の発光素子と、発光素子の個数よりも少ない個数の受光素子とを備え、発光素子を1個づつまたはグループごとにパルス的に発光させる個別発光を実行し、前記発光素子で発光させた光を対象物で反射させ、当該反射光を前記受光素子で受光することを特徴とする反射形センサー。
【請求項2】
個別発光の際には、各発光素子ごとの発光又はグループごとの発光に対応して、どの発光素子またはグループの発光に基づく受光であるかを個別に識別することが可能であることを特徴とする請求項1に記載の反射形センサー。
【請求項3】
発光素子は、前記個別発光と、全ての発光素子を一斉に発光させる一斉発光を行うことを特徴とする請求項1又は2に記載の反射形センサー。
【請求項4】
4以上の発光素子と、1個の受光素子とによって構成されることを特徴とする請求項1乃至3のいずれかに記載の反射形センサー。
【請求項5】
発光素子は、受光素子を囲む位置に設けられていることを特徴とする請求項1乃至4のいずれかに記載の反射形センサー。
【請求項6】
全ての発光素子と、受光素子との距離が等しいことを特徴とする請求項1乃至5のいずれかに記載の反射形センサー。
【請求項7】
対象物の位置又は姿勢を判別する判別機能を備えたことを特徴とする請求項1乃至6のいずれかに記載の反射形センサー。
【請求項8】
物品搬送部を有し、物品搬送部の上に物品を載置して物品を搬送する物品搬送装置において、物品の下部又は上部を目視可能な位置に請求項1乃至7のいずれかに記載の反射形センサーを設置したことを特徴とする物品搬送装置。
【請求項9】
物品の搬送方向を変更する分岐部を有し、分岐部に前記反射形センサーが設置され、前記反射形センサーによって物品の位置を確認し、物品の位置を修正する位置修正機能を備え、前記位置修正機能によって物品の位置を修正した後に物品を搬送することを特徴とする請求項8に記載の物品搬送装置。
【請求項10】
物品に反射部材が設けられており、反射形センサーの発光素子で発光させた光を前記反射部材で反射させ、当該反射光を反射形センサーの受光素子で受光することを特徴とする請求項8又は9に記載の物品搬送装置。
【請求項11】
物品は搬送用パレットであり、当該搬送用パレットは裏面側に凹部を有し、凹部内に反射部材が設けられていることを特徴とする請求項10に記載の物品搬送装置。
【請求項12】
反射形センサーによって物品の位置を示す2以上の信号と、物品の存在を確認するための信号とが作成されることを特徴とする請求項8乃至11のいずれかに記載の物品搬送装置。
【請求項13】
反射形センサーによって物品の位置の確認と、物品の存在確認を行うものであり、発光素子は物品の位置を確認するための発光と、物品の存在確認を行うための発光を個別に行い、物品の存在確認を行うための発光に際して受光素子の感度が高感度に変更されることを特徴とする請求項8乃至12のいずれかに記載の物品搬送装置。
【請求項14】
複数の物品たる搬送用パレットを有し、搬送パレットには裏面の高さが異なるものが混在することを特徴とする請求項8乃至13のいずれかに記載の物品搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】

【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【公開番号】特開2011−173699(P2011−173699A)
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願番号】特願2010−39914(P2010−39914)
【出願日】平成22年2月25日(2010.2.25)
【出願人】(592026819)伊東電機株式会社 (71)
【Fターム(参考)】
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願日】平成22年2月25日(2010.2.25)
【出願人】(592026819)伊東電機株式会社 (71)
【Fターム(参考)】
[ Back to top ]