
物品搬送装置管理システム
【課題】異常の状況及びその異常の原因となっている部品を正確に把握して、迅速に異常の復旧作業を行うことができる物品搬送装置管理システムを提供する。
【解決手段】異常検出手段により検出された異常検出結果より、物品搬送装置の異常の原因となっている可能性のある部品を異常部品として特定する異常部品特定手段Bと、異常が発生した箇所の異常発生後の映像である異常映像を撮影するカメラ装置Tと、物品搬送装置の部品に関する部品データを予め記憶させた部品データ記憶手段Gとが設けられ、管理手段Aは、異常検出手段にて物品搬送装置の異常が検出されると、異常部品特定手段Bが特定した異常部品についての部品データを部品データ記憶手段Gから取得するとともに、異常部品に起因する異常についての異常映像をカメラ装置Tから取得して、部品データおよび異常映像を表示手段Eに表示するように構成されている。
【解決手段】異常検出手段により検出された異常検出結果より、物品搬送装置の異常の原因となっている可能性のある部品を異常部品として特定する異常部品特定手段Bと、異常が発生した箇所の異常発生後の映像である異常映像を撮影するカメラ装置Tと、物品搬送装置の部品に関する部品データを予め記憶させた部品データ記憶手段Gとが設けられ、管理手段Aは、異常検出手段にて物品搬送装置の異常が検出されると、異常部品特定手段Bが特定した異常部品についての部品データを部品データ記憶手段Gから取得するとともに、異常部品に起因する異常についての異常映像をカメラ装置Tから取得して、部品データおよび異常映像を表示手段Eに表示するように構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物品を搬送自在な物品搬送装置と、その物品搬送装置の稼動状況を管理する管理手段と、前記物品搬送装置の稼動状況が表示される表示手段とが設けられた物品搬送装置管理システムに関する。
【背景技術】
【0002】
従来の物品搬送装置管理システムとして、例えば、特許文献1には、異常を検出する異常検出手段と、異常検出手段が検出すべき異常に関する復旧作業内容などの文字データおよび異常が検出される部位の正常時の画像データを予め記憶させたデータ記憶手段とを備え、異常が検出されると、その異常に対応する異常データと画像データとを表示手段としての表示画面に表示させる物品搬送装置管理システムが開示されている。
【0003】
これにより、物品搬送装置管理システムにおいて異常が発生したときには、表示手段に異常が発生した部位についての正常時の画像データが表示されるとともに、異常の復旧方法を示す文字データが表示されるので、表示手段の表示内容を参照するだけで異常個所と異常の復旧方法を理解でき、迅速に復旧作業を行うことができるとされる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−72910号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の物品搬送装置管理システムでは、異常発生時には、予め保存された異常検出対象個所の正常時の画像データと異常の復旧方法を示す異常データとが表示画面に表示されるが、これらのデータの表示だけでは、異常個所における部品等の現在の状況を正確に把握するのは困難であった。つまり、異常部品の破損状況が深刻な状態ではなく異常部品の修理が可能な状態であるか、または、破損状況が深刻で修理が不可能で部品の交換が必要な状態であるかが表示画面の表示からは判断することができず、その破損状況を正確に把握するには、作業者が異常個所まで移動して直接確認することが必要であった。このように、従来の物品搬送装置管理システムでは、異常内容の確認に手間が掛かるという問題があり、その為に、異常の発生の原因となっている部品の特定が遅れ、例えば、部品の交換が必要な破損状況であった場合には、部品の発注が遅れて、異常の回復までに時間を要することとなるという問題があった。
【0006】
本発明は、かかる事情に鑑みてなされたものであり、異常の状況及びその異常の原因となっている部品を正確に把握して、迅速に異常の復旧作業を行うことができる物品搬送装置管理システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するための本発明に係る物品搬送装置管理システムの第1特徴構成は、
物品を搬送自在な物品搬送装置と、その物品搬送装置の稼動状況を管理する管理手段と、前記物品搬送装置の稼動状況が表示される表示手段とが設けられた物品搬送装置管理システムであって、
前記物品搬送装置の異常を検出する異常検出手段と、
前記異常検出手段により検出された異常検出結果より、前記物品搬送装置の異常の原因となっている可能性のある部品を異常部品として特定する異常部品特定手段と、
前記異常部品の異常発生後の映像である異常映像を撮影するカメラ装置と、
前記物品搬送装置の部品に関する部品データを予め記憶させた部品データ記憶手段とが設けられ、
前記管理手段は、前記異常検出手段にて前記物品搬送装置の異常が検出されると、前記異常部品特定手段が特定した前記異常部品の部品データを前記部品データ記憶手段から取得するとともに、当該異常部品に起因する異常についての前記異常映像を前記カメラ装置から取得して、前記異常部品の部品データおよび前記異常映像を前記表示手段に表示するように構成されている点にある。
【0008】
上記特徴構成によれば、管理手段は、異常検出手段にて物品搬送装置の異常が検出されると、異常部品に起因する異常についての異常映像をカメラ装置から取得して、異常映像を表示手段に表示するように構成されているので、表示手段に表示される異常部品の異常映像によって、異常が発生した異常部品の破損状況を確認することができる。これにより、破損状況が深刻な状況ではなく、異常部品の修理が可能な状態であるか、または、破損状況が深刻で部品の交換が必要であるのかを、表示画面の表示から判断することができる。さらに、上記特徴構成によれば、異常部品の部品データについても表示手段に表示されるので、特に、異常部品の交換が必要な破損状況である場合には、表示される異常部品の部品データに基づいて、部品の発注を迅速に行うことができる。このように、異常の状況及びその異常の原因となっている部品を正確に把握して、迅速に異常の復旧作業を行うことができる。
【0009】
本発明に係る物品搬送装置管理システムの第2特徴構成は、前記部品データ記憶手段は、前記異常部品の異常発生前の映像である正常映像を記憶する正常映像データ記憶手段を備え、
前記管理手段は、前記異常部品の部品データおよび前記異常映像に加えて、前記正常映像を前記表示手段に表示する点にある。
【0010】
上記特徴構成によれば、異常映像と正常映像とが表示手段に表示されるので、異常映像と正常映像とを比較することで、異常の原因となっている部品の破損状況を把握し易い。
【0011】
本発明に係る物品搬送装置管理システムの第3特徴構成は、前記部品データは、前記部品の値段または前記部品の納期の少なくとも一方を含んでいる点にある。
【0012】
上記特徴構成によれば、表示手段に表示される部品データは、部品の値段または部品の納期の少なくとも一方を含んでいるので、表示手段による表示より異常部品の値段または部品の納期を確認することができ、異常の復旧予定を迅速に策定し易くなる。
【0013】
本発明に係る物品搬送装置管理システムの第4特徴構成は、前記カメラ装置が、前記物品搬送装置に設けられ、前記管理手段は、前記異常部品が配置されている位置を判別する位置判別手段を備え、その位置判別手段の位置判別情報に基づいて、前記異常映像を取得する前記カメラ装置を選択する点にある。
【0014】
上記特徴構成によれば、カメラ装置が、物品搬送装置に設けられているので、物品搬送装置に発生する異常の映像である異常映像を詳細にカメラ装置によって撮影することができる。また、管理手段は、異常部品が配置されている位置を判別する位置判別手段を備え、その位置判別手段の位置判別情報に基づいて、異常映像を取得するカメラ装置を選択するので、異常が発生した異常部品及びその周辺を撮影するために適した位置に設置されているカメラ装置が位置判別手段によって選択されて、その選択されたカメラ装置によって異常の状態が詳細に示された異常映像を撮影することができるので、異常の原因となっている部品をより正確に把握することができる。
【0015】
本発明に係る物品搬送装置管理システムの第5特徴構成は、前記カメラ装置は、前記カメラ装置の撮像方向を変更するカメラ駆動部を備え、前記管理手段は、前記異常部品が配置されている位置を向く方向に前記カメラ装置の撮像方向を変更させるべく、前記カメラ駆動手段の作動を制御するように構成されている点にある。
【0016】
上記特徴構成によれば、カメラ装置は、カメラ装置の撮像方向を変更するカメラ駆動部を備えるので、カメラ装置の撮像方向を異常部品が配置されている位置を撮影するために適した方向に向けることができる。また、管理手段は、異常部品が配置されている位置を向く方向にカメラ装置の撮像方向を変更させるべく、カメラ駆動手段の作動を制御するように構成されているので、異常が発生した異常部品の異常の状態がより詳細に示された異常映像を撮影することができるので、異常の原因となっている部品をより正確に把握することができる。
【図面の簡単な説明】
【0017】
【図1】実施形態の物品搬送装置管理システムの概略図。
【図2】実施形態の物品搬送装置管理システムの制御ブロック図。
【図3】スタッカークレーンの概略図。
【図4】スタッカークレーンの制御ブロック図。
【図5】異常部品特定テーブルを示す図。
【図6】異常発生時における表示手段の表示画面を示す図。
【図7】発生した異常に対処する動作手順を示フローチャート。
【発明を実施するための形態】
【0018】
以下、本発明の物品搬送装置管理システムの実施の形態を図面に基づいて説明する。
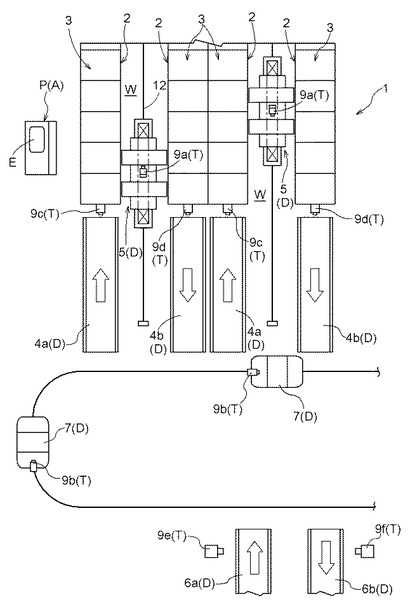
図1に示す本実施形態における物品搬送装置管理システム1は、物品を搬送自在な物品搬送装置Dと、その物品搬送装置Dの稼動状況を管理する管理手段Aと、物品搬送装置Dの稼動状況が表示される表示手段Eとが設けられており、物品を収納棚2の所望の収納部3に収納保管できるとともに、適宜所望の収納棚2の収納部3から物品を取出すことができるように構成されている。
【0019】
収納棚2は、収納部3の開口部が向かい合う状態で通路Wを隔てて対をなす状態で配置されている。また、物品搬送装置Dとしては、収納棚2の側面に備えられた、収納棚入庫用コンベア4a及び収納棚出庫用コンベア4bと、この一対の収納棚2の間の通路Wを走行しつつ、収納棚入庫用コンベア4a及び収納棚出庫用コンベア4bの収納棚2側の端部と収納棚2の各収納部3との間で、通路Wに沿って移動して、物品を搬送するスタッカークレーン5と、物品搬送装置管理システム1に新たに物品を入庫するための入庫コンベア6a、及び、収納していた物品を外部に搬出するための出庫コンベア6bと、その入庫コンベア6aまたは出庫コンベア6bと、収納棚入庫用コンベア4aまたは収納棚出庫用コンベア4bとの間において物品の輸送を行なう搬送台車7とが設けられている。
【0020】
また、物品搬送装置Dとしてのスタッカークレーン5、コンベア4a、4b、6a、6bおよび搬送台車7のそれぞれには、物品搬送装置Dの稼動状態が適正か否かを検出する異常検出手段S(図3および図4参照)が設けられている。この、異常検出手段Sは、物品搬送装置Dの稼動状態を検出することができる各種のセンサで構成され、例えば、スタッカークレーン5における昇降台位置検出センサ52(図3および図4参照)などで構成される。
【0021】
そして、物品搬送装置Dにおいて異常が発生した場合に、異常が発生した箇所の異常発生後の映像である異常映像T1を撮影するカメラ装置Tが設けられている。具体的には、図1に示すように、スタッカークレーン5および搬送台車7には、それぞれスタッカークレーン用カメラ9aおよび搬送台車用カメラ9bが備えられている。さらに、入庫コンベア6aおよび出庫コンベア6bをそれぞれ撮像する入庫コンベア用カメラ9cおよび出庫コンベア用カメラ9dと、収納棚入庫用コンベア4aおよび収納棚出庫用コンベア4bをそれぞれ撮像する入庫口コンベア用カメラ9eおよび出庫口コンベア用カメラ9fが備えられている。なお、コンベア用カメラ9c〜9fは、コンベア4a、4b、6a、6bの本体から離れた場所に設置されている。
【0022】
また、この物品搬送装置管理システム1には、作業者によって物品搬送装置Dの監視および操作が可能な操作架台Pが設けられている。この操作架台Pには物品搬送装置Dの稼動状況を管理する管理手段Aが備えられるとともに、液晶表示装置などで構成される表示手段Eが設けられている。また、物品搬送装置Dの操作、カメラ装置Tの操作および表示手段Eに表示される情報の操作が可能なキーボード等から構成される操作部(図示せず)が備えられている。
【0023】
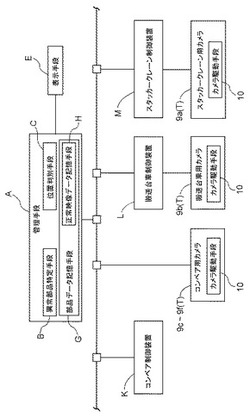
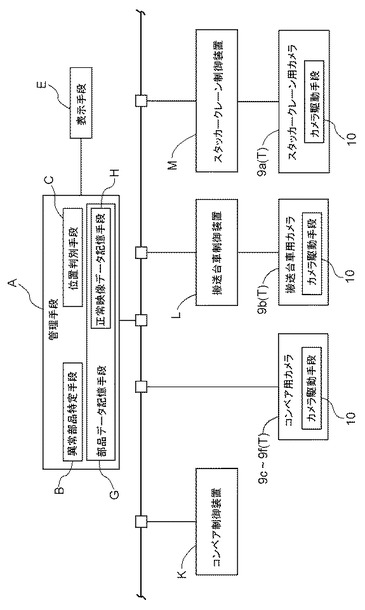
図2に基づいて、管理手段A、表示手段E、物品搬送装置Dおよびカメラ装置Tの接続の状態について説明する。図2は本実施形態における物品搬送装置管理システムの制御ブロック図である。物品搬送装置Dの稼動状況を管理する管理手段Aには、それぞれのコンベア4a、4b、6a、6bに設けられ、その動作を制御するコンベア制御装置Kと、搬送台車7に設けられ、その動作を制御する搬送台車制御装置Lと、スタッカークレーン5に設けられ、その動作を制御するスタッカークレーン制御装置Mとが接続されており、管理手段Aが、物品搬送装置Dとしてのスタッカークレーン5、コンベア4a、4b、6a、6bおよび搬送台車7の動作を制御することができるように構成されている。
【0024】
また、搬送台車制御装置Lおよびスタッカークレーン制御装置Mには、異常が発生した箇所の異常発生後の映像である異常映像T1を撮影するカメラ装置Tとして、スタッカークレーン用カメラ9aおよび搬送台車用カメラ9bが接続され、このスタッカークレーン用カメラ9aおよび搬送台車用カメラ9bは、それぞれ、スタッカークレーン制御装置Mおよび搬送台車制御装置Lを経由して管理手段Aから制御指令を受けるように構成されている。
一方、カメラ装置Tとしてのコンベア用カメラ9c〜9fは、上述の如く、コンベア4a、4b、6a、6bの本体から離れた場所に設置されているため、コンベア制御装置Kには接続されておらず、管理手段Aと直接接続されて、管理手段Aから直接に制御指令を受ける構成とされている。なお、カメラ装置Tに備えられたカメラ駆動手段10は、カメラ装置Tの撮像方向を変更するための駆動手段であり、管理手段Aによって制御される。
【0025】
そして、管理手段Aは、物品搬送装置Dに設けられた異常検出手段S(図3および図4参照)により検出された異常検出結果より、物品搬送装置Dの異常の原因となっている部品を異常部品として特定する異常部品特定手段Bと、異常部品特定手段Bによって特定された異常部品が配置されている位置を判別する位置判別手段Cと、物品搬送装置Dの部品に関する部品データG1を予め記憶させた部品データ記憶手段Gとが設けられている。ここで、部品データ記憶手段Gは、異常部品の異常発生前の映像である正常映像H1が記憶されている正常映像データ記憶手段Hを備えている。
【0026】
また、管理手段Aは、異常検出手段Sにて物品搬送装置Dの異常が検出されると、異常部品特定手段Bが特定した異常部品についての部品データG1を部品データ記憶手段Gから取得するとともに、異常部品に起因する異常についての異常映像T1をカメラ装置Tから取得して、部品データG1および異常映像T1を表示手段Eに表示するように構成されている。その際、管理手段Aは、その異常部品についての部品データG1および異常映像T1に加えて、その異常部品の正常映像H1を表示手段Eに表示するように構成されている。ここで、表示手段Eに表示される部品データG1としては、部品の在庫数、納期、価格、交換所要時間などのデータより構成され、部品の値段または部品の納期を含んだデータとされている(図6参照)。ここで、表示手段Eに表示される部品の納期としては、過去にその部品を発注してから納品するまでに要した平均的な期間に基づいて予測される納期が表示される。
【0027】
そして、管理手段Aは、その位置判別手段Cの位置判別情報に基づいて、異常映像T1を取得するカメラ装置Tを選択するように構成されている。例えば、スタッカークレーン5において異常が発生した場合では、異常が発生している位置がスタッカークレーン5であることを位置判別手段Cが判別し、管理手段Aがその判別結果に伴ってスタッカークレーン用カメラ9aを、異常映像T1を取得するカメラ装置Tとして選択するように構成されている。
【0028】
また、管理手段Aは、異常部品が配置されている位置を向く方向にカメラ装置Tの撮像方向を変更させるべく、カメラ駆動手段10の作動を制御するとともに、異常部品の大きさおよび異常部品が配置される位置に応じてカメラ装置Tの撮像倍率を変化させるべく、カメラ装置Tのズーム機構を制御する。
【0029】
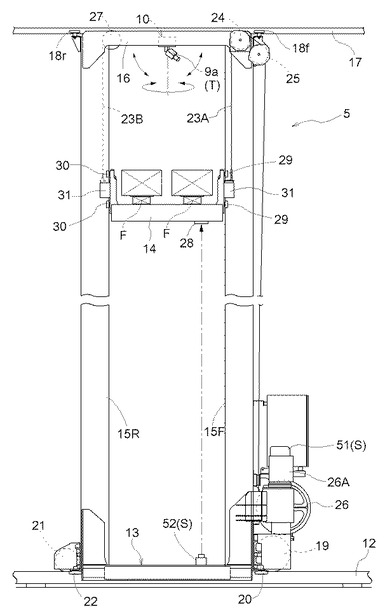
次に、物品搬送装置Dの詳細について、図3に基づいてスタッカークレーン5を一例として説明する。スタッカークレーン5は、通路Wに沿って床面上に設置された単一の走行レール12に沿って走行する下部枠体13と、その下部枠体13の走行方向の前後端部箇所に立設されて、昇降台14を昇降自在に案内する前後一対の支柱15F、15Rと、それら支柱15F、15Rの上端部同士を連結する上部枠体16とを備え、且つ、前後一対の支柱15F、15Rの上端側部分の夫々に、通路Wの天井側に設置されたガイドレール17の横側面に接当する左右一対のガイドローラ18f、18rが装備されている。したがって、スタッカークレーン5は、走行レール12とガイドレール17にて案内される状態で通路Wを走行して、物品の収納棚2への入出庫動作を行うように構成されている。
【0030】
下部枠体13は、その走行方向の前後方向の一端側に、走行用電動モータ(図示せず)を備えて、走行レール12の上面に載置される走行輪としての駆動車輪19と走行レール12の横側面に接当する左右一対のガイド輪20を備え、かつ、その前後方向の他端側に、走行レール12の上面に載置される走行輪としての遊転車輪21と走行レール12の横側面に接当する左右一対のガイド輪22を備えて、走行レール12に沿って走行するように構成されている。ここで、下部枠体13、駆動車輪19および遊転車輪21を含んで、走行レール12上を走行するために必要となるスタッカークレーン5の構成部分を走行台車と呼ぶ。
【0031】
また、下部枠体13の上側には、昇降経路上での昇降台14の位置を検出する昇降台位置検出センサ52が設けられている。昇降台位置検出センサ52は、昇降台14の下面に設けられた昇降用反射体28に向けて上下方向に沿って測距用光(レーザ光)を投光して昇降用反射体28にて反射された光を受光することにより、昇降台14までの距離を計測して、計測した昇降台14までの距離から昇降経路上での昇降台14の昇降位置を検出するように構成されている。
【0032】
ちなみに、以下の説明においては、駆動車輪19が位置する側がスタッカークレーン5の前方側であり、遊転車輪21が位置する側がスタッカークレーン5の後方側であるとして説明する。したがって、上述した前後一対の支柱15F、15Rは、前方側の支柱15Fが、駆動車輪19の存在側に配設され、後方側の支柱15Rが、遊転車輪11の存在側に配設されることになる。尚、以下の記載においては、スタッカークレーン5の前後方向を、車体前後方向と簡略して記載し、また、スタッカークレーン5の横幅方向を、車体横幅方向と簡略して記載する。
【0033】
図3に示すように、昇降台14は、その前後両端部の夫々に昇降用索状体としての昇降用ワイヤ23A、23Bが連結されて吊下げ支持されており、昇降台14には、収納部3に対して出退移動自在で、物品の収納部3への収容、および、物品の収納部3からの回収を自在とするフォーク装置Fが、車体前後方向に並べて2台設けられている。この2台のフォーク装置Fの設置間隔は、図1に示すように、収納棚2における収納部3aが、車体前後方向に相当する棚横幅方向に並ぶ間隔と同じであり、2台のフォーク装置Fによって、棚横幅方向に並ぶ2つの収納部3に対して同時に移載作業を行えるようになっている。
【0034】
また、昇降台14を吊り下げ支持する一対の昇降用ワイヤ23A、23Bのうち、昇降台14の車体前方側箇所に連結される昇降用ワイヤ23Aは、昇降台14から上方に向けて伸びたのちに、上部枠体16の車体前方側部分に取付けた第1ワイヤ案内プーリ24及び前方側の支柱15Fの上端部に取付けた第2ワイヤ案内プーリ25にて、下方に向かうように案内されて、前方側の支柱15Fの下端側部分の前方側箇所に配設される巻取りドラム26に巻き取られるようになっている。
【0035】
そして、昇降台14を吊り下げ支持する1対の昇降用ワイヤ23A、23Bのうち、昇降台14の車体後方側箇所に連結される昇降用ワイヤ23Bは、昇降台14から上方に向けて伸びたのちに、先ず、上部枠体16の車体後方側部分に取付けた第3ワイヤ案内プーリ27にて車体前方側に向かうように案内され、次に、前方側の支柱15Fの上端部に取付けた第4案内体(図示せず)にて、下方に向かうように案内されて、上述した巻取りドラム26に巻き取られるようになっている。
【0036】
したがって、巻取りドラム26が昇降用電動モータ26Aにて正逆に駆動回転されて、昇降用ワイヤ23A、23Bの巻取りドラム26からの繰り出しや巻取りドラム26への巻き取りが行われることにより、昇降台14が昇降されるように構成されている。また、昇降用電動モータ26Aには、昇降台用モータ回転数検出センサ51が設けられている。なお、この昇降台用モータ回転数検出センサ51はロータリーエンコーダ等で構成されて、昇降用電動モータ26Aの回転数だけでなく、昇降用電動モータ26Aの回転角度についても正確に検出することができる。
【0037】
また、上部枠体16の車体前後方向の中央部には、スタッカークレーン5において発生する異常の異常映像T1を撮影するスタッカークレーン用カメラ9aが設けられている。このスタッカークレーン用カメラ9aには、管理手段Aによる制御によって撮影方向を変更させるカメラ駆動手段10が備えられている。そして、スタッカークレーン用カメラ9aは、静止映像および動画映像を撮影することができるとともに、ズーム機構を有しており、撮影状態に応じて管理手段Aによってズーム機構が自動調整される。
【0038】
また、昇降台14の車体前方側の端部には、前方側の支柱15Fの両横側面に接当する横位置規制用輪体29、及び、後方側の支柱15Rの両横側面に接当する横位置規制用輪体30が設けられている。これにより、昇降台14は、車体横幅方向や車体前後方向での位置が規制されるように、前後の支柱15R、15Fにて案内される状態で、前後の支柱15R、15Fに沿って昇降されるように構成されている。さらに、昇降台14の車体前方側の端部には、昇降用ワイヤ23A、23Bの切断が発生した時に、昇降台14が落下することを防止する昇降台落下防止装置31が設けられている。
【0039】
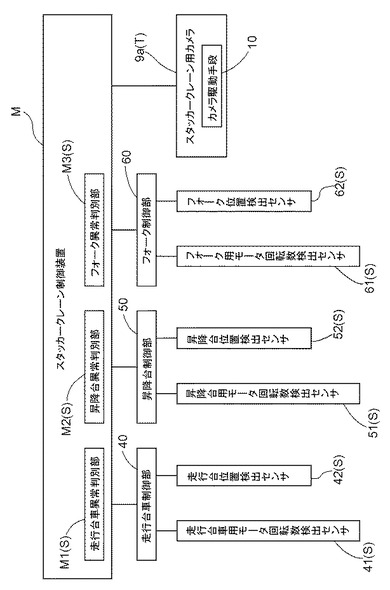
図4は、スタッカークレーン5の制御ブロックを示す図である。管理手段Aとの間でデータの授受を行うスタッカークレーン制御装置Mに、走行台車制御部40、昇降台制御部50、フォーク制御部60およびスタッカークレーン用カメラ9aが接続されている。
【0040】
そして、異常検出手段Sとして、走行台車制御部40には、走行用電動モータ(図示せず)の回転数を検出する走行台車用モータ回転数検出センサ41と、通路W上における走行台車の位置を検出する走行台車位置検出センサ42とが設けられ、また、昇降台制御部50には、昇降用モータの回転数を検出する昇降台用モータ回転数検出センサ51と、スタッカークレーン5における昇降台14の高さ位置を検出する昇降台位置検出センサ52とが設けられ、さらに、フォーク制御部60には、フォーク出退用モータの回転数を検出するフォーク用モータ回転数検出センサ61と、フォーク装置Fの突出位置および引退位置を検出するフォーク位置検出センサ62とが設けられている。
【0041】
さらに、異常検出手段Sとして、スタッカークレーン制御装置Mには、走行台車用モータ回転数検出センサ41と走行台車位置検出センサ42による検出信号より、走行台車の異常の発生を検出する昇降台異常判別部M1と、昇降台用モータ回転数検出センサ51と昇降台位置検出センサ52による検出信号より、昇降台14の異常の発生を検出する昇降台異常判別部M2と、フォーク用モータ回転数検出センサ61とフォーク位置検出センサ62による検出信号より、フォーク装置Fの異常の発生を検出するフォーク異常判別部M3とがそれぞれプログラム形式により備えられており、これにより、例えば、昇降台14に発生する異常の判別は、昇降台用モータ回転数検出センサ51、昇降台位置検出センサ52の検出結果に基づいて、昇降台異常判別部M2によって判別される構成とされ、異常が発生したと判別されると、その異常に対応する異常検出信号が昇降台異常判別部M2から管理手段Aに送られる。
【0042】
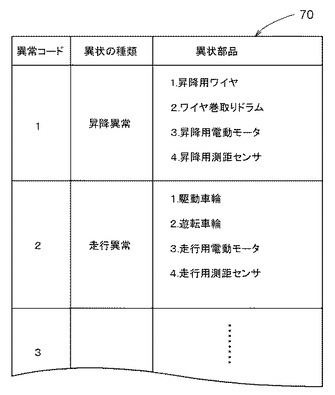
図5は、管理手段Aの記憶部(図示せず)において記憶されている異常部品特定テーブル70を示している。上述の如く、異常検出信号が昇降台異常判別部M2から管理手段Aに送られると、管理手段Aは、異常検出信号より異常のコードを決定し、異常部品特定処理を実行することで、異常部品特定テーブル70を参照して、当該異常コードに該当する異常の種類から異常部品を特定する。このように、管理手段Aは、異常部品特定手段Bをプログラム形式で備えている。なお、異常部品特定テーブル70においては異常の原因となっている可能性の高い部品から順番で異常部品がリストアップされている。
従って、例えば、昇降台用モータ回転数検出センサ51によって、昇降用電動モータ26Aが正常の稼働していることが検出されている時に、昇降台位置検出センサ52によって検出される昇降台14の位置が変化しないという状況となった時は、昇降台異常判別部M2は、その状態が異常であると判別して、その異常に対応する異常検出信号を管理手段Aに伝える。
【0043】
そして、管理手段Aによって、図5に示す異常部品特定テーブル70に基づいて、管理手段Aが昇降台異常判別部M2から受けた異常検出信号より「異常コード1」の異常が発生していると判断されるとともに、異常の種類が「昇降異常」であると判別されて、異常部品として「昇降用ワイヤ」が異常の可能性が最も高い部品として特定される。それに続き「ワイヤ巻取りドラム、昇降用電動モータ、昇降用測距センサ」が異常部品として特定されて、それらの異常部品についての部品データG1を部品データ記憶手段Gから取得される。そして、位置判別手段Cにより特定された異常部品である「昇降用ワイヤ、ワイヤ巻取りドラム、昇降用電動モータ、昇降用測距センサ」が配置されている位置が判別され、その位置判別情報に基づいて、異常映像T1を取得するカメラ装置Tとしてスタッカークレーン用カメラ9aが選択されるとともに、異常部品の異常映像T1をスタッカークレーン用カメラ9aで取得して、部品データG1および異常映像T1を表示手段Eに表示するように構成されている。
その際、管理手段Aは、異常部品である「昇降用ワイヤ、ワイヤ巻取りドラム、昇降用電動モータ、昇降用測距センサ」についての部品データG1および異常映像T1に加えて、正常映像H1を正常映像データ記憶手段Hから取得して表示手段Eに表示するように構成されている。
【0044】
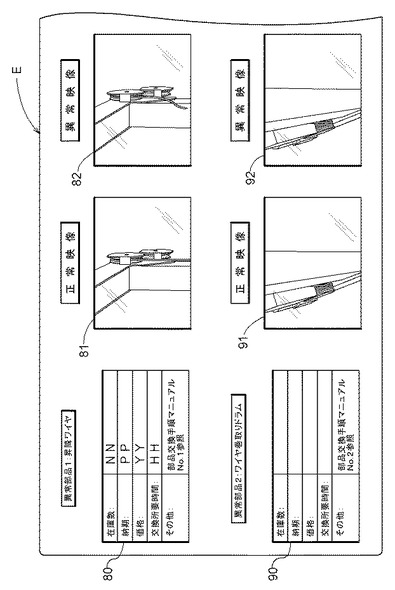
異常発生時において表示手段Eに表示される画面の一例を図6に示す。表示手段Eには上下2段の表示構成として、上段および下段にそれぞれ異常部品についての部品データG1および異常映像T1、正常映像H1が表示されるように、2つの異常部品の情報が表示手段Eに表示される。
【0045】
表示手段Eの上段に表示される第1部品情報表示部80には、異常を発生している可能性が最も高い異常部品である昇降用ワイヤ23A、23Bの部品データG1が表示されている。ここで、第1部品情報表示部80に表示される部品データG1として、異常部品である昇降用ワイヤ23A、23Bの在庫数、納期、価格、交換所要時間などのデータが表示されている。また、第1異常映像表示部82には、昇降用ワイヤ23A、23Bの異常映像T1が表示されている。さらに、第1正常映像表示部81には、正常映像データ記憶手段Hから取得した昇降用ワイヤ23A、23Bの正常映像H1が表示されている。
また、表示手段Eの下段には、異常を発生している可能性が2番目に高いと推測されていた異常部品であるワイヤ巻取りドラム26の部品データG1が第2部品情報表示部90に表示されるとともに、第2異常映像表示部92には、ワイヤ巻取りドラム26の異常映像T1が表示され、第2正常映像表示部91には、正常映像データ記憶手段Hから取得したワイヤ巻取りドラム26の正常映像H1が表示される。
【0046】
さらに、作業者は操作架台P(図1参照)の操作部を操作することで、異常である可能性が3番目に高いと推測されていた異常部品である昇降用電動モータ26Aの情報、および、異常である可能性が4番目に高いと推測されていた異常部品である昇降台位置検出センサ52の情報を表示手段Eに表示させることができる。
【0047】
また、管理手段Aは、異常部品が配置されている位置を向く方向にスタッカークレーン用カメラ9aの撮像方向を変更させるべく、カメラ駆動手段10の作動を制御するとともに、異常部品の大きさおよび異常部品が配置される位置に応じてスタッカークレーン用カメラ9aの撮像倍率を変化させるべく、スタッカークレーン用カメラ9aのズーム機構を制御しているので、異常部品を観察しやすい異常映像T1が異常映像表示部82、92に表示される。加えて、作業者は、さらに詳細に異常部品を観察するために、表示手段Eが備えられた操作架台Pの操作部において、カメラ装置Tを操作することができる。例えば、カメラ装置Tのズーム機能でさらに拡大して異常部品を観察することができるほか、カメラ装置Tを自在に回転させて、異常部品の周辺の状態を確認することができる。
【0048】
そして、作業者は、表示手段Eに表示される情報をもとに異常の原因について検討を行い、その結果、例えば、図6に示す表示手段Eに表示される画面表示中の、第1異常映像表示部82に表示された、昇降用ワイヤ23A、23Bの異常映像T1と、第1正常映像表示部81に表示された正常映像H1を確認することで、昇降用ワイヤ23A、23Bが切断されていることを確認することができる。なお、この状態では昇降台14が落下することを防止する昇降台落下防止装置31が働いて昇降台14の落下が防止されている。
また、第2異常映像表示部92に表示されたワイヤ巻取りドラム26の異常映像T1と、第2正常映像表示部91に表示された正常映像H1を確認することで、ワイヤ巻取りドラム26には異常が発生していないことを確認することができる。これにより、作業者は、例えば、切断された昇降用ワイヤ23A、23Bを交換することが必要であることを迅速に判断することができ、同時に、第1部品情報表示部80に表示される昇降用ワイヤ23A、23Bの部品データG1より、昇降用ワイヤ23A、23Bの在庫数、部品価格および部品納期を確認することができる。
【0049】
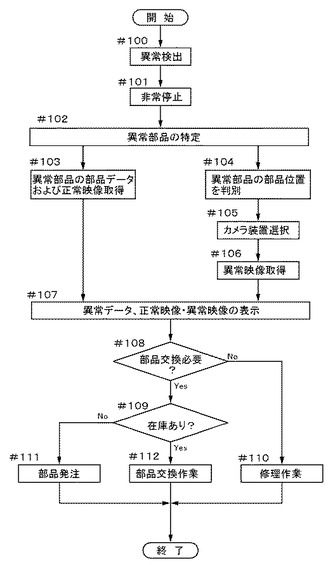
次に、図7に基づいて、発生した異常に対処する際の動作手順の一例を示す。異常検出手段Sにおいて異常が検出され、異常検出信号が管理手段Aに伝えられると(#100)、管理手段Aは物品搬送装置管理システム1を非常停止させる(#101)。そして、その異常検出信号に基づいて、異常部品特定テーブル70を参照して異常部品特定手段Bが異常部品を特定する(#102)。そして、管理手段Aにより、その特定された異常部品の部品データG1が、部品データ記憶手段Gから取得されるとともに、異常部品の正常時の正常映像H1が、正常映像データ記憶手段Hから取得される(#103)。
【0050】
一方、その特定された異常部品の部品位置情報が位置判別手段Cにより取得される(#104)。そして、その取得された部品位置情報に基づいて、カメラ装置Tが選択される(#105)。次に、その選択されたカメラ装置Tにより異常発生後の異常部品の異常映像T1が取得される(#106)。
【0051】
そして、異常部品の異常映像T1、正常映像H1および部品データG1が、図6に示したように表示手段Eに同時に表示される(#107)。そして、作業者は、表示手段Eに表示される異常部品の情報を確認し、最終的に異常の原因となっている異常部品を特定する。
【0052】
そして、最終的に異常の原因となっていると特定した異常部品について、その部品の状態から部品交換が必要であるかどうかの判断を行う(#108)。部品交換が必要ではなく、修理で回復可能と判断した場合は、作業者は、異常個所に移動して異常部品の修理作業を行なう(#110)。一方、異常部品の部品交換が必要であると判断した場合、その部品の在庫の有無を確認して(#109)、在庫がないときは部品の発注を行う(#111)。一方、部品の在庫があるときは、部品を調達して物品搬送装置管理システム1の異常発生個所に移動して部品の交換作業を行う(#112)。
【0053】
〔別実施形態〕
(1)上記実施形態においては、スタッカークレーン用カメラ9aおよび搬送台車用カメラ9bは、スタッカークレーン5および搬送台車7の本体に設置したが、これに限らず、スタッカークレーン用カメラ9aおよび搬送台車用カメラ9bを、スタッカークレーン5および搬送台車7の本体から離れた場所に設置しても構わない。
【0054】
(2)上記実施形態においては、コンベア用カメラ9c〜9fは、コンベア4a、4b、6a、6bの本体から離れた場所に設置されたが、これに限らず、コンベア用カメラ9c〜9fをコンベア4a、4b、6a、6bの本体に設置しても構わない。
【0055】
(3)上記実施形態においては、スタッカークレーン5において、1台のスタッカークレーン用カメラ9aを設けたが、これに限らず、スタッカークレーン5にスタッカークレーン用カメラ9aを複数設けてもよい。この場合、異常部品及びその周辺を撮影するためにより適した位置に設置されているスタッカークレーン用カメラ9aが位置判別手段Cによって異常映像T1を撮影するカメラ装置Tとして選択される。例えば、上部枠体16の車体前後方向の中央部と、下部枠体13の車体前後方向の中央部とにスタッカークレーン用カメラ9aをそれぞれ設けた場合においては、上記実施形態で示された、異常コード1にかかる昇降異常が発生すると、表示手段Eに表示される第2異常映像表示部92に表示されたワイヤ巻取りドラム26の異常映像T1は、下部枠体13の車体前後方向の中央部に設けられたスタッカークレーン用カメラ9aによって撮影される。これにより、異常の状態が詳細に示された異常映像T1を撮影することができるので、異常の原因となっている部品の破損状況をより正確に把握することができる。
【0056】
(4)上記実施形態においては、表示手段Eに表示される表示画面において、異常部品の部品データG1、異常映像T1および正常映像H1が同時に表示される構成としたが、これに限らず、異常部品の部品データG1、異常映像T1および正常映像H1が、操作部における操作によって順次、部品データG1、異常映像T1および正常映像H1が切り替わるように構成して、それぞれ単独で表示手段Eに大きく表示されるようにしてもかまわない。
【0057】
(5)上記実施形態においては、異常部品特定手段Bは、異常部品特定テーブル70を参照して異常部品を特定するテーブル参照方式としたが、このテーブル参照方式に加えて、異常検出手段Sの検出情報から、異常部品を直接特定するように構成されていてもよい。例えば、昇降台位置検出センサ52から、測距用光(レーザ光)が出光されないという異常が発生した場合において、その異常に対応する異常検出信号が昇降台異常判別部M2から管理手段Aに送られると、管理手段Aは、異常部品特定テーブル70等のテーブルを参照せずに、昇降台位置検出センサ52が異常部品であるとして直接特定する構成としてもよい。
【0058】
(6)上記実施形態においては、表示手段Eに表示される部品データG1に、部品の納期を含むものとしたが、これに限らず、管理手段Aが、異常部品の部品データG1を表示手段Eに表示する前に、部品データG1によって部品の在庫数を確認し、部品の在庫がない場合には、異常部品の納期を含む部品データG1を表示する構成としてもよい。
【符号の説明】
【0059】
A 管理手段
B 異常部品特定手段
C 位置判別手段
D 物品搬送装置
E 表示手段
G 部品データ記憶手段
G1 部品データ
H 正常映像データ記憶手段
H1 正常映像
S 異常検出手段
T カメラ装置
T1 異常映像
10 カメラ駆動部
【技術分野】
【0001】
本発明は、物品を搬送自在な物品搬送装置と、その物品搬送装置の稼動状況を管理する管理手段と、前記物品搬送装置の稼動状況が表示される表示手段とが設けられた物品搬送装置管理システムに関する。
【背景技術】
【0002】
従来の物品搬送装置管理システムとして、例えば、特許文献1には、異常を検出する異常検出手段と、異常検出手段が検出すべき異常に関する復旧作業内容などの文字データおよび異常が検出される部位の正常時の画像データを予め記憶させたデータ記憶手段とを備え、異常が検出されると、その異常に対応する異常データと画像データとを表示手段としての表示画面に表示させる物品搬送装置管理システムが開示されている。
【0003】
これにより、物品搬送装置管理システムにおいて異常が発生したときには、表示手段に異常が発生した部位についての正常時の画像データが表示されるとともに、異常の復旧方法を示す文字データが表示されるので、表示手段の表示内容を参照するだけで異常個所と異常の復旧方法を理解でき、迅速に復旧作業を行うことができるとされる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−72910号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の物品搬送装置管理システムでは、異常発生時には、予め保存された異常検出対象個所の正常時の画像データと異常の復旧方法を示す異常データとが表示画面に表示されるが、これらのデータの表示だけでは、異常個所における部品等の現在の状況を正確に把握するのは困難であった。つまり、異常部品の破損状況が深刻な状態ではなく異常部品の修理が可能な状態であるか、または、破損状況が深刻で修理が不可能で部品の交換が必要な状態であるかが表示画面の表示からは判断することができず、その破損状況を正確に把握するには、作業者が異常個所まで移動して直接確認することが必要であった。このように、従来の物品搬送装置管理システムでは、異常内容の確認に手間が掛かるという問題があり、その為に、異常の発生の原因となっている部品の特定が遅れ、例えば、部品の交換が必要な破損状況であった場合には、部品の発注が遅れて、異常の回復までに時間を要することとなるという問題があった。
【0006】
本発明は、かかる事情に鑑みてなされたものであり、異常の状況及びその異常の原因となっている部品を正確に把握して、迅速に異常の復旧作業を行うことができる物品搬送装置管理システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するための本発明に係る物品搬送装置管理システムの第1特徴構成は、
物品を搬送自在な物品搬送装置と、その物品搬送装置の稼動状況を管理する管理手段と、前記物品搬送装置の稼動状況が表示される表示手段とが設けられた物品搬送装置管理システムであって、
前記物品搬送装置の異常を検出する異常検出手段と、
前記異常検出手段により検出された異常検出結果より、前記物品搬送装置の異常の原因となっている可能性のある部品を異常部品として特定する異常部品特定手段と、
前記異常部品の異常発生後の映像である異常映像を撮影するカメラ装置と、
前記物品搬送装置の部品に関する部品データを予め記憶させた部品データ記憶手段とが設けられ、
前記管理手段は、前記異常検出手段にて前記物品搬送装置の異常が検出されると、前記異常部品特定手段が特定した前記異常部品の部品データを前記部品データ記憶手段から取得するとともに、当該異常部品に起因する異常についての前記異常映像を前記カメラ装置から取得して、前記異常部品の部品データおよび前記異常映像を前記表示手段に表示するように構成されている点にある。
【0008】
上記特徴構成によれば、管理手段は、異常検出手段にて物品搬送装置の異常が検出されると、異常部品に起因する異常についての異常映像をカメラ装置から取得して、異常映像を表示手段に表示するように構成されているので、表示手段に表示される異常部品の異常映像によって、異常が発生した異常部品の破損状況を確認することができる。これにより、破損状況が深刻な状況ではなく、異常部品の修理が可能な状態であるか、または、破損状況が深刻で部品の交換が必要であるのかを、表示画面の表示から判断することができる。さらに、上記特徴構成によれば、異常部品の部品データについても表示手段に表示されるので、特に、異常部品の交換が必要な破損状況である場合には、表示される異常部品の部品データに基づいて、部品の発注を迅速に行うことができる。このように、異常の状況及びその異常の原因となっている部品を正確に把握して、迅速に異常の復旧作業を行うことができる。
【0009】
本発明に係る物品搬送装置管理システムの第2特徴構成は、前記部品データ記憶手段は、前記異常部品の異常発生前の映像である正常映像を記憶する正常映像データ記憶手段を備え、
前記管理手段は、前記異常部品の部品データおよび前記異常映像に加えて、前記正常映像を前記表示手段に表示する点にある。
【0010】
上記特徴構成によれば、異常映像と正常映像とが表示手段に表示されるので、異常映像と正常映像とを比較することで、異常の原因となっている部品の破損状況を把握し易い。
【0011】
本発明に係る物品搬送装置管理システムの第3特徴構成は、前記部品データは、前記部品の値段または前記部品の納期の少なくとも一方を含んでいる点にある。
【0012】
上記特徴構成によれば、表示手段に表示される部品データは、部品の値段または部品の納期の少なくとも一方を含んでいるので、表示手段による表示より異常部品の値段または部品の納期を確認することができ、異常の復旧予定を迅速に策定し易くなる。
【0013】
本発明に係る物品搬送装置管理システムの第4特徴構成は、前記カメラ装置が、前記物品搬送装置に設けられ、前記管理手段は、前記異常部品が配置されている位置を判別する位置判別手段を備え、その位置判別手段の位置判別情報に基づいて、前記異常映像を取得する前記カメラ装置を選択する点にある。
【0014】
上記特徴構成によれば、カメラ装置が、物品搬送装置に設けられているので、物品搬送装置に発生する異常の映像である異常映像を詳細にカメラ装置によって撮影することができる。また、管理手段は、異常部品が配置されている位置を判別する位置判別手段を備え、その位置判別手段の位置判別情報に基づいて、異常映像を取得するカメラ装置を選択するので、異常が発生した異常部品及びその周辺を撮影するために適した位置に設置されているカメラ装置が位置判別手段によって選択されて、その選択されたカメラ装置によって異常の状態が詳細に示された異常映像を撮影することができるので、異常の原因となっている部品をより正確に把握することができる。
【0015】
本発明に係る物品搬送装置管理システムの第5特徴構成は、前記カメラ装置は、前記カメラ装置の撮像方向を変更するカメラ駆動部を備え、前記管理手段は、前記異常部品が配置されている位置を向く方向に前記カメラ装置の撮像方向を変更させるべく、前記カメラ駆動手段の作動を制御するように構成されている点にある。
【0016】
上記特徴構成によれば、カメラ装置は、カメラ装置の撮像方向を変更するカメラ駆動部を備えるので、カメラ装置の撮像方向を異常部品が配置されている位置を撮影するために適した方向に向けることができる。また、管理手段は、異常部品が配置されている位置を向く方向にカメラ装置の撮像方向を変更させるべく、カメラ駆動手段の作動を制御するように構成されているので、異常が発生した異常部品の異常の状態がより詳細に示された異常映像を撮影することができるので、異常の原因となっている部品をより正確に把握することができる。
【図面の簡単な説明】
【0017】
【図1】実施形態の物品搬送装置管理システムの概略図。
【図2】実施形態の物品搬送装置管理システムの制御ブロック図。
【図3】スタッカークレーンの概略図。
【図4】スタッカークレーンの制御ブロック図。
【図5】異常部品特定テーブルを示す図。
【図6】異常発生時における表示手段の表示画面を示す図。
【図7】発生した異常に対処する動作手順を示フローチャート。
【発明を実施するための形態】
【0018】
以下、本発明の物品搬送装置管理システムの実施の形態を図面に基づいて説明する。
図1に示す本実施形態における物品搬送装置管理システム1は、物品を搬送自在な物品搬送装置Dと、その物品搬送装置Dの稼動状況を管理する管理手段Aと、物品搬送装置Dの稼動状況が表示される表示手段Eとが設けられており、物品を収納棚2の所望の収納部3に収納保管できるとともに、適宜所望の収納棚2の収納部3から物品を取出すことができるように構成されている。
【0019】
収納棚2は、収納部3の開口部が向かい合う状態で通路Wを隔てて対をなす状態で配置されている。また、物品搬送装置Dとしては、収納棚2の側面に備えられた、収納棚入庫用コンベア4a及び収納棚出庫用コンベア4bと、この一対の収納棚2の間の通路Wを走行しつつ、収納棚入庫用コンベア4a及び収納棚出庫用コンベア4bの収納棚2側の端部と収納棚2の各収納部3との間で、通路Wに沿って移動して、物品を搬送するスタッカークレーン5と、物品搬送装置管理システム1に新たに物品を入庫するための入庫コンベア6a、及び、収納していた物品を外部に搬出するための出庫コンベア6bと、その入庫コンベア6aまたは出庫コンベア6bと、収納棚入庫用コンベア4aまたは収納棚出庫用コンベア4bとの間において物品の輸送を行なう搬送台車7とが設けられている。
【0020】
また、物品搬送装置Dとしてのスタッカークレーン5、コンベア4a、4b、6a、6bおよび搬送台車7のそれぞれには、物品搬送装置Dの稼動状態が適正か否かを検出する異常検出手段S(図3および図4参照)が設けられている。この、異常検出手段Sは、物品搬送装置Dの稼動状態を検出することができる各種のセンサで構成され、例えば、スタッカークレーン5における昇降台位置検出センサ52(図3および図4参照)などで構成される。
【0021】
そして、物品搬送装置Dにおいて異常が発生した場合に、異常が発生した箇所の異常発生後の映像である異常映像T1を撮影するカメラ装置Tが設けられている。具体的には、図1に示すように、スタッカークレーン5および搬送台車7には、それぞれスタッカークレーン用カメラ9aおよび搬送台車用カメラ9bが備えられている。さらに、入庫コンベア6aおよび出庫コンベア6bをそれぞれ撮像する入庫コンベア用カメラ9cおよび出庫コンベア用カメラ9dと、収納棚入庫用コンベア4aおよび収納棚出庫用コンベア4bをそれぞれ撮像する入庫口コンベア用カメラ9eおよび出庫口コンベア用カメラ9fが備えられている。なお、コンベア用カメラ9c〜9fは、コンベア4a、4b、6a、6bの本体から離れた場所に設置されている。
【0022】
また、この物品搬送装置管理システム1には、作業者によって物品搬送装置Dの監視および操作が可能な操作架台Pが設けられている。この操作架台Pには物品搬送装置Dの稼動状況を管理する管理手段Aが備えられるとともに、液晶表示装置などで構成される表示手段Eが設けられている。また、物品搬送装置Dの操作、カメラ装置Tの操作および表示手段Eに表示される情報の操作が可能なキーボード等から構成される操作部(図示せず)が備えられている。
【0023】
図2に基づいて、管理手段A、表示手段E、物品搬送装置Dおよびカメラ装置Tの接続の状態について説明する。図2は本実施形態における物品搬送装置管理システムの制御ブロック図である。物品搬送装置Dの稼動状況を管理する管理手段Aには、それぞれのコンベア4a、4b、6a、6bに設けられ、その動作を制御するコンベア制御装置Kと、搬送台車7に設けられ、その動作を制御する搬送台車制御装置Lと、スタッカークレーン5に設けられ、その動作を制御するスタッカークレーン制御装置Mとが接続されており、管理手段Aが、物品搬送装置Dとしてのスタッカークレーン5、コンベア4a、4b、6a、6bおよび搬送台車7の動作を制御することができるように構成されている。
【0024】
また、搬送台車制御装置Lおよびスタッカークレーン制御装置Mには、異常が発生した箇所の異常発生後の映像である異常映像T1を撮影するカメラ装置Tとして、スタッカークレーン用カメラ9aおよび搬送台車用カメラ9bが接続され、このスタッカークレーン用カメラ9aおよび搬送台車用カメラ9bは、それぞれ、スタッカークレーン制御装置Mおよび搬送台車制御装置Lを経由して管理手段Aから制御指令を受けるように構成されている。
一方、カメラ装置Tとしてのコンベア用カメラ9c〜9fは、上述の如く、コンベア4a、4b、6a、6bの本体から離れた場所に設置されているため、コンベア制御装置Kには接続されておらず、管理手段Aと直接接続されて、管理手段Aから直接に制御指令を受ける構成とされている。なお、カメラ装置Tに備えられたカメラ駆動手段10は、カメラ装置Tの撮像方向を変更するための駆動手段であり、管理手段Aによって制御される。
【0025】
そして、管理手段Aは、物品搬送装置Dに設けられた異常検出手段S(図3および図4参照)により検出された異常検出結果より、物品搬送装置Dの異常の原因となっている部品を異常部品として特定する異常部品特定手段Bと、異常部品特定手段Bによって特定された異常部品が配置されている位置を判別する位置判別手段Cと、物品搬送装置Dの部品に関する部品データG1を予め記憶させた部品データ記憶手段Gとが設けられている。ここで、部品データ記憶手段Gは、異常部品の異常発生前の映像である正常映像H1が記憶されている正常映像データ記憶手段Hを備えている。
【0026】
また、管理手段Aは、異常検出手段Sにて物品搬送装置Dの異常が検出されると、異常部品特定手段Bが特定した異常部品についての部品データG1を部品データ記憶手段Gから取得するとともに、異常部品に起因する異常についての異常映像T1をカメラ装置Tから取得して、部品データG1および異常映像T1を表示手段Eに表示するように構成されている。その際、管理手段Aは、その異常部品についての部品データG1および異常映像T1に加えて、その異常部品の正常映像H1を表示手段Eに表示するように構成されている。ここで、表示手段Eに表示される部品データG1としては、部品の在庫数、納期、価格、交換所要時間などのデータより構成され、部品の値段または部品の納期を含んだデータとされている(図6参照)。ここで、表示手段Eに表示される部品の納期としては、過去にその部品を発注してから納品するまでに要した平均的な期間に基づいて予測される納期が表示される。
【0027】
そして、管理手段Aは、その位置判別手段Cの位置判別情報に基づいて、異常映像T1を取得するカメラ装置Tを選択するように構成されている。例えば、スタッカークレーン5において異常が発生した場合では、異常が発生している位置がスタッカークレーン5であることを位置判別手段Cが判別し、管理手段Aがその判別結果に伴ってスタッカークレーン用カメラ9aを、異常映像T1を取得するカメラ装置Tとして選択するように構成されている。
【0028】
また、管理手段Aは、異常部品が配置されている位置を向く方向にカメラ装置Tの撮像方向を変更させるべく、カメラ駆動手段10の作動を制御するとともに、異常部品の大きさおよび異常部品が配置される位置に応じてカメラ装置Tの撮像倍率を変化させるべく、カメラ装置Tのズーム機構を制御する。
【0029】
次に、物品搬送装置Dの詳細について、図3に基づいてスタッカークレーン5を一例として説明する。スタッカークレーン5は、通路Wに沿って床面上に設置された単一の走行レール12に沿って走行する下部枠体13と、その下部枠体13の走行方向の前後端部箇所に立設されて、昇降台14を昇降自在に案内する前後一対の支柱15F、15Rと、それら支柱15F、15Rの上端部同士を連結する上部枠体16とを備え、且つ、前後一対の支柱15F、15Rの上端側部分の夫々に、通路Wの天井側に設置されたガイドレール17の横側面に接当する左右一対のガイドローラ18f、18rが装備されている。したがって、スタッカークレーン5は、走行レール12とガイドレール17にて案内される状態で通路Wを走行して、物品の収納棚2への入出庫動作を行うように構成されている。
【0030】
下部枠体13は、その走行方向の前後方向の一端側に、走行用電動モータ(図示せず)を備えて、走行レール12の上面に載置される走行輪としての駆動車輪19と走行レール12の横側面に接当する左右一対のガイド輪20を備え、かつ、その前後方向の他端側に、走行レール12の上面に載置される走行輪としての遊転車輪21と走行レール12の横側面に接当する左右一対のガイド輪22を備えて、走行レール12に沿って走行するように構成されている。ここで、下部枠体13、駆動車輪19および遊転車輪21を含んで、走行レール12上を走行するために必要となるスタッカークレーン5の構成部分を走行台車と呼ぶ。
【0031】
また、下部枠体13の上側には、昇降経路上での昇降台14の位置を検出する昇降台位置検出センサ52が設けられている。昇降台位置検出センサ52は、昇降台14の下面に設けられた昇降用反射体28に向けて上下方向に沿って測距用光(レーザ光)を投光して昇降用反射体28にて反射された光を受光することにより、昇降台14までの距離を計測して、計測した昇降台14までの距離から昇降経路上での昇降台14の昇降位置を検出するように構成されている。
【0032】
ちなみに、以下の説明においては、駆動車輪19が位置する側がスタッカークレーン5の前方側であり、遊転車輪21が位置する側がスタッカークレーン5の後方側であるとして説明する。したがって、上述した前後一対の支柱15F、15Rは、前方側の支柱15Fが、駆動車輪19の存在側に配設され、後方側の支柱15Rが、遊転車輪11の存在側に配設されることになる。尚、以下の記載においては、スタッカークレーン5の前後方向を、車体前後方向と簡略して記載し、また、スタッカークレーン5の横幅方向を、車体横幅方向と簡略して記載する。
【0033】
図3に示すように、昇降台14は、その前後両端部の夫々に昇降用索状体としての昇降用ワイヤ23A、23Bが連結されて吊下げ支持されており、昇降台14には、収納部3に対して出退移動自在で、物品の収納部3への収容、および、物品の収納部3からの回収を自在とするフォーク装置Fが、車体前後方向に並べて2台設けられている。この2台のフォーク装置Fの設置間隔は、図1に示すように、収納棚2における収納部3aが、車体前後方向に相当する棚横幅方向に並ぶ間隔と同じであり、2台のフォーク装置Fによって、棚横幅方向に並ぶ2つの収納部3に対して同時に移載作業を行えるようになっている。
【0034】
また、昇降台14を吊り下げ支持する一対の昇降用ワイヤ23A、23Bのうち、昇降台14の車体前方側箇所に連結される昇降用ワイヤ23Aは、昇降台14から上方に向けて伸びたのちに、上部枠体16の車体前方側部分に取付けた第1ワイヤ案内プーリ24及び前方側の支柱15Fの上端部に取付けた第2ワイヤ案内プーリ25にて、下方に向かうように案内されて、前方側の支柱15Fの下端側部分の前方側箇所に配設される巻取りドラム26に巻き取られるようになっている。
【0035】
そして、昇降台14を吊り下げ支持する1対の昇降用ワイヤ23A、23Bのうち、昇降台14の車体後方側箇所に連結される昇降用ワイヤ23Bは、昇降台14から上方に向けて伸びたのちに、先ず、上部枠体16の車体後方側部分に取付けた第3ワイヤ案内プーリ27にて車体前方側に向かうように案内され、次に、前方側の支柱15Fの上端部に取付けた第4案内体(図示せず)にて、下方に向かうように案内されて、上述した巻取りドラム26に巻き取られるようになっている。
【0036】
したがって、巻取りドラム26が昇降用電動モータ26Aにて正逆に駆動回転されて、昇降用ワイヤ23A、23Bの巻取りドラム26からの繰り出しや巻取りドラム26への巻き取りが行われることにより、昇降台14が昇降されるように構成されている。また、昇降用電動モータ26Aには、昇降台用モータ回転数検出センサ51が設けられている。なお、この昇降台用モータ回転数検出センサ51はロータリーエンコーダ等で構成されて、昇降用電動モータ26Aの回転数だけでなく、昇降用電動モータ26Aの回転角度についても正確に検出することができる。
【0037】
また、上部枠体16の車体前後方向の中央部には、スタッカークレーン5において発生する異常の異常映像T1を撮影するスタッカークレーン用カメラ9aが設けられている。このスタッカークレーン用カメラ9aには、管理手段Aによる制御によって撮影方向を変更させるカメラ駆動手段10が備えられている。そして、スタッカークレーン用カメラ9aは、静止映像および動画映像を撮影することができるとともに、ズーム機構を有しており、撮影状態に応じて管理手段Aによってズーム機構が自動調整される。
【0038】
また、昇降台14の車体前方側の端部には、前方側の支柱15Fの両横側面に接当する横位置規制用輪体29、及び、後方側の支柱15Rの両横側面に接当する横位置規制用輪体30が設けられている。これにより、昇降台14は、車体横幅方向や車体前後方向での位置が規制されるように、前後の支柱15R、15Fにて案内される状態で、前後の支柱15R、15Fに沿って昇降されるように構成されている。さらに、昇降台14の車体前方側の端部には、昇降用ワイヤ23A、23Bの切断が発生した時に、昇降台14が落下することを防止する昇降台落下防止装置31が設けられている。
【0039】
図4は、スタッカークレーン5の制御ブロックを示す図である。管理手段Aとの間でデータの授受を行うスタッカークレーン制御装置Mに、走行台車制御部40、昇降台制御部50、フォーク制御部60およびスタッカークレーン用カメラ9aが接続されている。
【0040】
そして、異常検出手段Sとして、走行台車制御部40には、走行用電動モータ(図示せず)の回転数を検出する走行台車用モータ回転数検出センサ41と、通路W上における走行台車の位置を検出する走行台車位置検出センサ42とが設けられ、また、昇降台制御部50には、昇降用モータの回転数を検出する昇降台用モータ回転数検出センサ51と、スタッカークレーン5における昇降台14の高さ位置を検出する昇降台位置検出センサ52とが設けられ、さらに、フォーク制御部60には、フォーク出退用モータの回転数を検出するフォーク用モータ回転数検出センサ61と、フォーク装置Fの突出位置および引退位置を検出するフォーク位置検出センサ62とが設けられている。
【0041】
さらに、異常検出手段Sとして、スタッカークレーン制御装置Mには、走行台車用モータ回転数検出センサ41と走行台車位置検出センサ42による検出信号より、走行台車の異常の発生を検出する昇降台異常判別部M1と、昇降台用モータ回転数検出センサ51と昇降台位置検出センサ52による検出信号より、昇降台14の異常の発生を検出する昇降台異常判別部M2と、フォーク用モータ回転数検出センサ61とフォーク位置検出センサ62による検出信号より、フォーク装置Fの異常の発生を検出するフォーク異常判別部M3とがそれぞれプログラム形式により備えられており、これにより、例えば、昇降台14に発生する異常の判別は、昇降台用モータ回転数検出センサ51、昇降台位置検出センサ52の検出結果に基づいて、昇降台異常判別部M2によって判別される構成とされ、異常が発生したと判別されると、その異常に対応する異常検出信号が昇降台異常判別部M2から管理手段Aに送られる。
【0042】
図5は、管理手段Aの記憶部(図示せず)において記憶されている異常部品特定テーブル70を示している。上述の如く、異常検出信号が昇降台異常判別部M2から管理手段Aに送られると、管理手段Aは、異常検出信号より異常のコードを決定し、異常部品特定処理を実行することで、異常部品特定テーブル70を参照して、当該異常コードに該当する異常の種類から異常部品を特定する。このように、管理手段Aは、異常部品特定手段Bをプログラム形式で備えている。なお、異常部品特定テーブル70においては異常の原因となっている可能性の高い部品から順番で異常部品がリストアップされている。
従って、例えば、昇降台用モータ回転数検出センサ51によって、昇降用電動モータ26Aが正常の稼働していることが検出されている時に、昇降台位置検出センサ52によって検出される昇降台14の位置が変化しないという状況となった時は、昇降台異常判別部M2は、その状態が異常であると判別して、その異常に対応する異常検出信号を管理手段Aに伝える。
【0043】
そして、管理手段Aによって、図5に示す異常部品特定テーブル70に基づいて、管理手段Aが昇降台異常判別部M2から受けた異常検出信号より「異常コード1」の異常が発生していると判断されるとともに、異常の種類が「昇降異常」であると判別されて、異常部品として「昇降用ワイヤ」が異常の可能性が最も高い部品として特定される。それに続き「ワイヤ巻取りドラム、昇降用電動モータ、昇降用測距センサ」が異常部品として特定されて、それらの異常部品についての部品データG1を部品データ記憶手段Gから取得される。そして、位置判別手段Cにより特定された異常部品である「昇降用ワイヤ、ワイヤ巻取りドラム、昇降用電動モータ、昇降用測距センサ」が配置されている位置が判別され、その位置判別情報に基づいて、異常映像T1を取得するカメラ装置Tとしてスタッカークレーン用カメラ9aが選択されるとともに、異常部品の異常映像T1をスタッカークレーン用カメラ9aで取得して、部品データG1および異常映像T1を表示手段Eに表示するように構成されている。
その際、管理手段Aは、異常部品である「昇降用ワイヤ、ワイヤ巻取りドラム、昇降用電動モータ、昇降用測距センサ」についての部品データG1および異常映像T1に加えて、正常映像H1を正常映像データ記憶手段Hから取得して表示手段Eに表示するように構成されている。
【0044】
異常発生時において表示手段Eに表示される画面の一例を図6に示す。表示手段Eには上下2段の表示構成として、上段および下段にそれぞれ異常部品についての部品データG1および異常映像T1、正常映像H1が表示されるように、2つの異常部品の情報が表示手段Eに表示される。
【0045】
表示手段Eの上段に表示される第1部品情報表示部80には、異常を発生している可能性が最も高い異常部品である昇降用ワイヤ23A、23Bの部品データG1が表示されている。ここで、第1部品情報表示部80に表示される部品データG1として、異常部品である昇降用ワイヤ23A、23Bの在庫数、納期、価格、交換所要時間などのデータが表示されている。また、第1異常映像表示部82には、昇降用ワイヤ23A、23Bの異常映像T1が表示されている。さらに、第1正常映像表示部81には、正常映像データ記憶手段Hから取得した昇降用ワイヤ23A、23Bの正常映像H1が表示されている。
また、表示手段Eの下段には、異常を発生している可能性が2番目に高いと推測されていた異常部品であるワイヤ巻取りドラム26の部品データG1が第2部品情報表示部90に表示されるとともに、第2異常映像表示部92には、ワイヤ巻取りドラム26の異常映像T1が表示され、第2正常映像表示部91には、正常映像データ記憶手段Hから取得したワイヤ巻取りドラム26の正常映像H1が表示される。
【0046】
さらに、作業者は操作架台P(図1参照)の操作部を操作することで、異常である可能性が3番目に高いと推測されていた異常部品である昇降用電動モータ26Aの情報、および、異常である可能性が4番目に高いと推測されていた異常部品である昇降台位置検出センサ52の情報を表示手段Eに表示させることができる。
【0047】
また、管理手段Aは、異常部品が配置されている位置を向く方向にスタッカークレーン用カメラ9aの撮像方向を変更させるべく、カメラ駆動手段10の作動を制御するとともに、異常部品の大きさおよび異常部品が配置される位置に応じてスタッカークレーン用カメラ9aの撮像倍率を変化させるべく、スタッカークレーン用カメラ9aのズーム機構を制御しているので、異常部品を観察しやすい異常映像T1が異常映像表示部82、92に表示される。加えて、作業者は、さらに詳細に異常部品を観察するために、表示手段Eが備えられた操作架台Pの操作部において、カメラ装置Tを操作することができる。例えば、カメラ装置Tのズーム機能でさらに拡大して異常部品を観察することができるほか、カメラ装置Tを自在に回転させて、異常部品の周辺の状態を確認することができる。
【0048】
そして、作業者は、表示手段Eに表示される情報をもとに異常の原因について検討を行い、その結果、例えば、図6に示す表示手段Eに表示される画面表示中の、第1異常映像表示部82に表示された、昇降用ワイヤ23A、23Bの異常映像T1と、第1正常映像表示部81に表示された正常映像H1を確認することで、昇降用ワイヤ23A、23Bが切断されていることを確認することができる。なお、この状態では昇降台14が落下することを防止する昇降台落下防止装置31が働いて昇降台14の落下が防止されている。
また、第2異常映像表示部92に表示されたワイヤ巻取りドラム26の異常映像T1と、第2正常映像表示部91に表示された正常映像H1を確認することで、ワイヤ巻取りドラム26には異常が発生していないことを確認することができる。これにより、作業者は、例えば、切断された昇降用ワイヤ23A、23Bを交換することが必要であることを迅速に判断することができ、同時に、第1部品情報表示部80に表示される昇降用ワイヤ23A、23Bの部品データG1より、昇降用ワイヤ23A、23Bの在庫数、部品価格および部品納期を確認することができる。
【0049】
次に、図7に基づいて、発生した異常に対処する際の動作手順の一例を示す。異常検出手段Sにおいて異常が検出され、異常検出信号が管理手段Aに伝えられると(#100)、管理手段Aは物品搬送装置管理システム1を非常停止させる(#101)。そして、その異常検出信号に基づいて、異常部品特定テーブル70を参照して異常部品特定手段Bが異常部品を特定する(#102)。そして、管理手段Aにより、その特定された異常部品の部品データG1が、部品データ記憶手段Gから取得されるとともに、異常部品の正常時の正常映像H1が、正常映像データ記憶手段Hから取得される(#103)。
【0050】
一方、その特定された異常部品の部品位置情報が位置判別手段Cにより取得される(#104)。そして、その取得された部品位置情報に基づいて、カメラ装置Tが選択される(#105)。次に、その選択されたカメラ装置Tにより異常発生後の異常部品の異常映像T1が取得される(#106)。
【0051】
そして、異常部品の異常映像T1、正常映像H1および部品データG1が、図6に示したように表示手段Eに同時に表示される(#107)。そして、作業者は、表示手段Eに表示される異常部品の情報を確認し、最終的に異常の原因となっている異常部品を特定する。
【0052】
そして、最終的に異常の原因となっていると特定した異常部品について、その部品の状態から部品交換が必要であるかどうかの判断を行う(#108)。部品交換が必要ではなく、修理で回復可能と判断した場合は、作業者は、異常個所に移動して異常部品の修理作業を行なう(#110)。一方、異常部品の部品交換が必要であると判断した場合、その部品の在庫の有無を確認して(#109)、在庫がないときは部品の発注を行う(#111)。一方、部品の在庫があるときは、部品を調達して物品搬送装置管理システム1の異常発生個所に移動して部品の交換作業を行う(#112)。
【0053】
〔別実施形態〕
(1)上記実施形態においては、スタッカークレーン用カメラ9aおよび搬送台車用カメラ9bは、スタッカークレーン5および搬送台車7の本体に設置したが、これに限らず、スタッカークレーン用カメラ9aおよび搬送台車用カメラ9bを、スタッカークレーン5および搬送台車7の本体から離れた場所に設置しても構わない。
【0054】
(2)上記実施形態においては、コンベア用カメラ9c〜9fは、コンベア4a、4b、6a、6bの本体から離れた場所に設置されたが、これに限らず、コンベア用カメラ9c〜9fをコンベア4a、4b、6a、6bの本体に設置しても構わない。
【0055】
(3)上記実施形態においては、スタッカークレーン5において、1台のスタッカークレーン用カメラ9aを設けたが、これに限らず、スタッカークレーン5にスタッカークレーン用カメラ9aを複数設けてもよい。この場合、異常部品及びその周辺を撮影するためにより適した位置に設置されているスタッカークレーン用カメラ9aが位置判別手段Cによって異常映像T1を撮影するカメラ装置Tとして選択される。例えば、上部枠体16の車体前後方向の中央部と、下部枠体13の車体前後方向の中央部とにスタッカークレーン用カメラ9aをそれぞれ設けた場合においては、上記実施形態で示された、異常コード1にかかる昇降異常が発生すると、表示手段Eに表示される第2異常映像表示部92に表示されたワイヤ巻取りドラム26の異常映像T1は、下部枠体13の車体前後方向の中央部に設けられたスタッカークレーン用カメラ9aによって撮影される。これにより、異常の状態が詳細に示された異常映像T1を撮影することができるので、異常の原因となっている部品の破損状況をより正確に把握することができる。
【0056】
(4)上記実施形態においては、表示手段Eに表示される表示画面において、異常部品の部品データG1、異常映像T1および正常映像H1が同時に表示される構成としたが、これに限らず、異常部品の部品データG1、異常映像T1および正常映像H1が、操作部における操作によって順次、部品データG1、異常映像T1および正常映像H1が切り替わるように構成して、それぞれ単独で表示手段Eに大きく表示されるようにしてもかまわない。
【0057】
(5)上記実施形態においては、異常部品特定手段Bは、異常部品特定テーブル70を参照して異常部品を特定するテーブル参照方式としたが、このテーブル参照方式に加えて、異常検出手段Sの検出情報から、異常部品を直接特定するように構成されていてもよい。例えば、昇降台位置検出センサ52から、測距用光(レーザ光)が出光されないという異常が発生した場合において、その異常に対応する異常検出信号が昇降台異常判別部M2から管理手段Aに送られると、管理手段Aは、異常部品特定テーブル70等のテーブルを参照せずに、昇降台位置検出センサ52が異常部品であるとして直接特定する構成としてもよい。
【0058】
(6)上記実施形態においては、表示手段Eに表示される部品データG1に、部品の納期を含むものとしたが、これに限らず、管理手段Aが、異常部品の部品データG1を表示手段Eに表示する前に、部品データG1によって部品の在庫数を確認し、部品の在庫がない場合には、異常部品の納期を含む部品データG1を表示する構成としてもよい。
【符号の説明】
【0059】
A 管理手段
B 異常部品特定手段
C 位置判別手段
D 物品搬送装置
E 表示手段
G 部品データ記憶手段
G1 部品データ
H 正常映像データ記憶手段
H1 正常映像
S 異常検出手段
T カメラ装置
T1 異常映像
10 カメラ駆動部
【特許請求の範囲】
【請求項1】
物品を搬送自在な物品搬送装置と、その物品搬送装置の稼動状況を管理する管理手段と、前記物品搬送装置の稼動状況が表示される表示手段とが設けられた物品搬送装置管理システムであって、
前記物品搬送装置の異常を検出する異常検出手段と、
前記異常検出手段により検出された異常検出結果より、前記物品搬送装置の異常の原因となっている可能性のある部品を異常部品として特定する異常部品特定手段と、
前記異常部品の異常発生後の映像である異常映像を撮影するカメラ装置と、
前記物品搬送装置の部品に関する部品データを予め記憶させた部品データ記憶手段とが設けられ、
前記管理手段は、前記異常検出手段にて前記物品搬送装置の異常が検出されると、前記異常部品特定手段が特定した前記異常部品の部品データを前記部品データ記憶手段から取得するとともに、当該異常部品に起因する異常についての前記異常映像を前記カメラ装置から取得して、前記異常部品の部品データおよび前記異常映像を前記表示手段に表示するように構成されている物品搬送装置管理システム。
【請求項2】
前記部品データ記憶手段は、前記異常部品の異常発生前の映像である正常映像を記憶する正常映像データ記憶手段を備え、
前記管理手段は、前記異常部品の部品データおよび前記異常映像に加えて、前記正常映像を前記表示手段に表示する請求項1に記載の物品搬送装置管理システム。
【請求項3】
前記部品データは、前記部品の値段または前記部品の納期の少なくとも一方を含んでいる請求項1または2に記載の物品搬送装置管理システム。
【請求項4】
前記カメラ装置が、前記物品搬送装置に設けられ、
前記管理手段は、前記異常部品が配置されている位置を判別する位置判別手段を備え、その位置判別手段の位置判別情報に基づいて、前記異常映像を取得する前記カメラ装置を選択する請求項1〜3の何れか一項に物品搬送装置管理システム。
【請求項5】
前記カメラ装置は、前記カメラ装置の撮像方向を変更するカメラ駆動部を備え、
前記管理手段は、前記異常部品が配置されている位置を向く方向に前記カメラ装置の撮像方向を変更させるべく、前記カメラ駆動手段の作動を制御するように構成されている請求項1〜4の何れか一項に物品搬送装置管理システム。
【請求項1】
物品を搬送自在な物品搬送装置と、その物品搬送装置の稼動状況を管理する管理手段と、前記物品搬送装置の稼動状況が表示される表示手段とが設けられた物品搬送装置管理システムであって、
前記物品搬送装置の異常を検出する異常検出手段と、
前記異常検出手段により検出された異常検出結果より、前記物品搬送装置の異常の原因となっている可能性のある部品を異常部品として特定する異常部品特定手段と、
前記異常部品の異常発生後の映像である異常映像を撮影するカメラ装置と、
前記物品搬送装置の部品に関する部品データを予め記憶させた部品データ記憶手段とが設けられ、
前記管理手段は、前記異常検出手段にて前記物品搬送装置の異常が検出されると、前記異常部品特定手段が特定した前記異常部品の部品データを前記部品データ記憶手段から取得するとともに、当該異常部品に起因する異常についての前記異常映像を前記カメラ装置から取得して、前記異常部品の部品データおよび前記異常映像を前記表示手段に表示するように構成されている物品搬送装置管理システム。
【請求項2】
前記部品データ記憶手段は、前記異常部品の異常発生前の映像である正常映像を記憶する正常映像データ記憶手段を備え、
前記管理手段は、前記異常部品の部品データおよび前記異常映像に加えて、前記正常映像を前記表示手段に表示する請求項1に記載の物品搬送装置管理システム。
【請求項3】
前記部品データは、前記部品の値段または前記部品の納期の少なくとも一方を含んでいる請求項1または2に記載の物品搬送装置管理システム。
【請求項4】
前記カメラ装置が、前記物品搬送装置に設けられ、
前記管理手段は、前記異常部品が配置されている位置を判別する位置判別手段を備え、その位置判別手段の位置判別情報に基づいて、前記異常映像を取得する前記カメラ装置を選択する請求項1〜3の何れか一項に物品搬送装置管理システム。
【請求項5】
前記カメラ装置は、前記カメラ装置の撮像方向を変更するカメラ駆動部を備え、
前記管理手段は、前記異常部品が配置されている位置を向く方向に前記カメラ装置の撮像方向を変更させるべく、前記カメラ駆動手段の作動を制御するように構成されている請求項1〜4の何れか一項に物品搬送装置管理システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−23313(P2013−23313A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−157995(P2011−157995)
【出願日】平成23年7月19日(2011.7.19)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月19日(2011.7.19)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
[ Back to top ]