
物品搬送装置
【課題】任意の間隔で搬送されてきた物品を高速で搬送する。
【解決手段】物品認識手段により得た情報に基づき、回転体20の回転中にアーム32を回動させて吸着予定の物品10に対向する吸着位置Uにおいて該物品10を吸着具34で吸着するに際して、上昇位置と下降位置との間の中途範囲において吸着予定の物品10)の斜め上方から前記吸着位置Uを含む下降位置付近に向けて該吸着具34を吸引しながら下降させ、該下降位置付近にて中途範囲よりも吸着具34を遅く下降させるようにアーム昇降モータを変速制御して、物品10を吸着する。
【解決手段】物品認識手段により得た情報に基づき、回転体20の回転中にアーム32を回動させて吸着予定の物品10に対向する吸着位置Uにおいて該物品10を吸着具34で吸着するに際して、上昇位置と下降位置との間の中途範囲において吸着予定の物品10)の斜め上方から前記吸着位置Uを含む下降位置付近に向けて該吸着具34を吸引しながら下降させ、該下降位置付近にて中途範囲よりも吸着具34を遅く下降させるようにアーム昇降モータを変速制御して、物品10を吸着する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、物品を高速で搬送し得る物品搬送装置に関するものである。
【背景技術】
【0002】
コンベヤ上をランダムに搬送される物品をCCDカメラ等の撮像手段で撮像し、その撮像した情報に基づき、ロボットのアームを回動させて該アームに設けられた吸着具で物品を吸着し、該物品を別のコンベヤに移載する装置が知られている(例えば、特許文献1参照)。特許文献1に開示の装置は、撮像手段で撮像した第1コンベヤ上の物品の情報に基づき、ロボットにおける1つのアームを回動させて、第1コンベヤにおいて搬送方向における前後左右に不規則な間隔で搬送される物品の中から特定の物品を吸着し、アームを第2コンベヤへ向けて回動させて、物品を第2コンベヤに載置している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−160416号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示の装置は、第1コンベヤと第2コンベヤとの間をロボットの1つのアームが行き戻りして物品を搬送するので、後工程が高速で処理する際に、その高速処理に対応するように夫々の物品を高速で吸着して搬送することができない。そして、ロボットで吸着できなかった物品は、回収装置により頻繁に回収されることになるので、物品を第1コンベヤから第2コンベヤへ効率的に受け渡すことができない。
【0005】
すなわち本発明は、従来の技術に係る物品搬送装置に内在する前記問題に鑑み、これらを好適に解決するべく提案されたものであって、任意の間隔で搬送されてきた物品であっても、吸着して高速で搬送することができる物品搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記課題を克服し、所期の目的を達成するため、本願の請求項1に係る発明の物品搬送装置は、
上下方向の軸周りを一定方向に回転する回転体と、
該回転体の回転中心から離れて回転体に対して回動可能に支持され、上下方向の軸周りに夫々独立して回動される複数のアームと、
各アームに設けられ、モータの駆動により上昇位置と下降位置との間で昇降移動される吸着具と、
任意の間隔でコンベヤ上を搬送される物品の位置を認識する物品認識手段とを備え、
前記物品認識手段により得た情報に基づき、前記回転体の回転中に前記アームを回動させて吸着予定の物品に対向する吸着位置において該物品を吸着具で吸着するに際して、前記上昇位置と前記下降位置との間の中途範囲において吸着予定の物品の斜め上方から前記吸着位置を含む下降位置付近に向けて吸引しながら該吸着具を下降させ、該下降位置付近にて前記中途範囲よりも該吸着具を遅く下降させるように前記モータを変速制御して、前記物品を吸着することを特徴とする。
請求項1に係る発明によれば、コンベヤ上を任意の間隔で物品が搬送されてきても、物品を安定した姿勢で吸着して、物品を高速で搬送することができる。また物品の吸着に際して、吸着予定の物品以外の物品に対して吸引による影響を与え難い。
【0007】
請求項2に係る発明では、前記下降位置が前記吸着予定の物品から離れた高い位置に設定されて、前記吸着具は、前記吸着位置で前記物品を浮上させて吸着することを特徴とする。
請求項2に係る発明によれば、物品を吸着する際に、物品を吸着具でコンベヤの搬送面に押さえ付けることがないので、物品に負荷を与えることはなく、また安定した姿勢で物品を吸着することができる。
【0008】
請求項3に係る発明では、前記吸着具で吸着した物品を上昇させる際に、該物品の下端がコンベヤ上の隣接する物品の上端を越えるまでの高さ範囲においては、前記吸着具を下降させる場合より上昇させるほうが吸着具の移動速度が速くなるよう前記モータを変速制御することを特徴とする。
請求項3に係る発明によれば、吸着した物品を上昇させる際に、コンベヤ上の隣接する物品に接触することを回避できる。
【0009】
請求項4に係る発明では、前記回転体の回転方向とは反対方向に前記アームを回動させて、前記吸着具によって吸着予定の物品が吸着されることを特徴とする。
請求項4に係る発明によれば、物品を吸着具で吸着する際に、回転体の回転方向と逆方向にアームを回動させて物品に対する吸着具の相対速度を小さくすることで、物品を安定した姿勢で吸着することができる。
【発明の効果】
【0010】
本発明に係る物品搬送装置によれば、コンベヤ上を任意の間隔で物品が搬送されてきても、物品を安定した姿勢で吸着して、物品を高速で搬送することができる。
【図面の簡単な説明】
【0011】
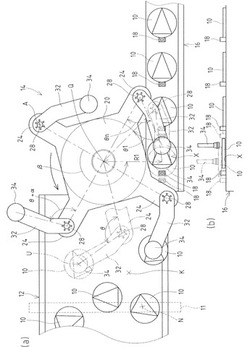
【図1】(a)は本発明の好適な実施例に係る物品搬送装置を示す概略平面図であり、(b)は第2コンベヤの概略正面図である。
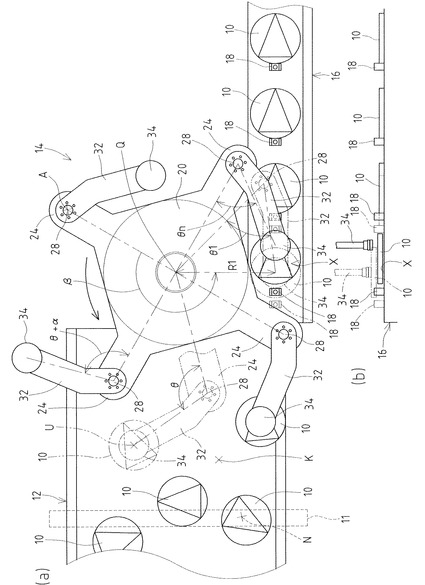
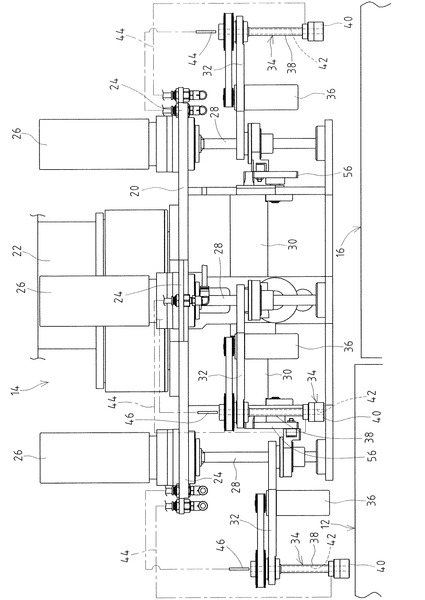
【図2】実施例の物品搬送装置の概略正面図である。
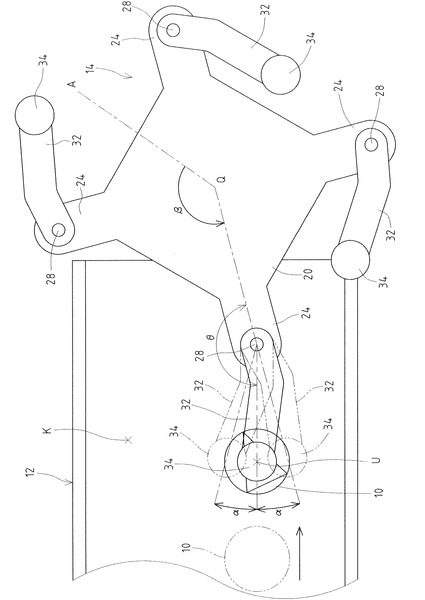
【図3】第1コンベヤ上の物品を吸着具で吸着する際のアームの動きを示す説明図である。
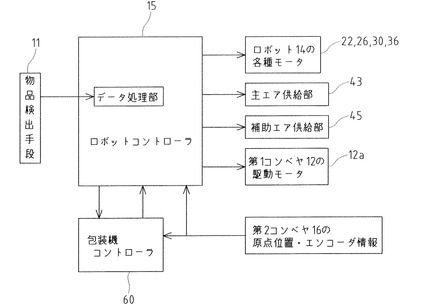
【図4】実施例の物品搬送装置の制御ブロック図である。
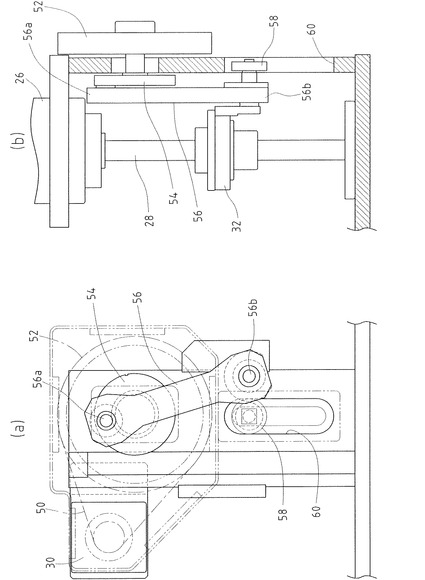
【図5】(a)は実施例のクランク機構を示す概略正面図であり、(b)は実施例のクランク機構を示す概略側面図である。
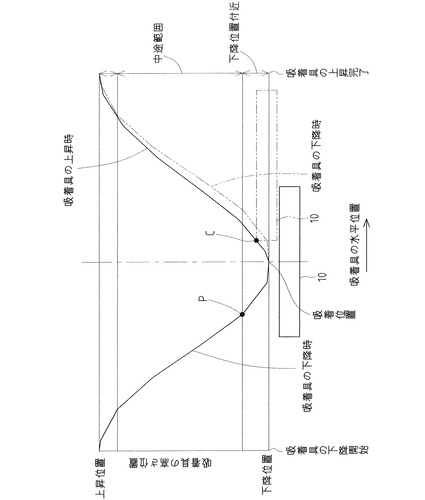
【図6】吸着具の速度変化を示す説明図である。
【発明を実施するための形態】
【0012】
次に、本発明に係る物品搬送装置につき、好適な実施例を挙げて、添付図面を参照して以下に説明する。
【実施例】
【0013】
図1および図2に示すように、物品搬送装置は、複数の物品10を所定速度で搬送するベルトコンベヤからなる第1コンベヤ(コンベヤ)12と、第1コンベヤ12上から物品10を受け取って、該物品10を載置位置Xに受け渡すように搬送するロボット14とを備えている。実施例では、物品10が毎回同じ位置に載置されるように載置位置Xが第1コンベヤ12に隣接配置された第2コンベヤ16の上流部に設定され、第2コンベヤ16において所定間隔毎に配設された仕切部材18,18の間になるタイミングで載置位置Xに物品10が載置される(図1(b)参照)。第1コンベヤ12において、その搬送方向における前後左右に不規則な間隔(任意の間隔)で複数の物品10が搬送される。第2コンベヤ16は、載置位置Xで仕切部材18,18間に1個ずつ載置された物品10を一列で搬送し、横形製袋充填機における筒状フィルム中に物品10を所定間隔毎に供給するようになっている。
【0014】
前記ロボット14は、架台(図示せず)に対して取り付けてあり、上下方向の軸周りに回転可能に配設された回転体20を備えている(図1または図2参照)。回転体20は、回転体モータ22の駆動を受けて、一定方向(実施例では図1の反時計回り)に一定速度で回転する。回転体20には、半径方向外側に延出するよう形成された4つの同じ形状の支持部24が設けられている。各支持部24には、該支持部24に対して上下方向に軸線が延在する回動軸28が、回転体20の回転中心Qから同じ距離だけ離れて、該回転中心Qを中心に等角度間隔で支持されている。回動軸28は、各支持部24に配設されたアーム回動モータ26の駆動力を受けて回動される。また各回動軸28には、アーム昇降モータ30の駆動を受けて回動軸28に沿って昇降可能なアーム32が配設されている。各アーム32は、対応のアーム回動モータ26の駆動を受けて回動軸28と共に該回動軸28を中心として水平方向に夫々独立して所定角度回動するよう構成され、アーム32の回動角度は、隣接するアーム32と接触しないように設定されている。
【0015】
図1に示すように、各アーム32には、対応の回動軸28から同じ距離だけ離れた該アーム32の自由端側に、吸着具34がアーム32に対して回転可能に設けられ、吸着具モータ36からの駆動力を受けて吸着具34が上下方向の軸周りに回転される。また、対応のアーム昇降モータ30の駆動によってアーム32が昇降移動されるのに伴って、アーム32の自由端側に設けられた吸着具34が上昇位置と下降位置との間で昇降移動される。吸着具34は、アーム32に支持された管状本体38の下端に吸着ヘッド40が着脱可能に取り付けられ、管状本体38および吸着ヘッド40の内部に、上下に貫通するエア流路42を備えている。なお、吸着ヘッド40は、搬送する物品10の形状や硬さ等の性状に応じて着脱交換される。吸着具34は、管状本体38の下部側面に接続されたエア配管44(図2参照)を介してコンプレッサー等のエア供給源(図示せず)からエア流路42に側方からエアを供給する主エア供給部43(図4参照)を備え、主エア供給部43のエアの供給によって吸着ヘッド40の下端面において負圧が発生する所謂エジェクタ型の真空発生手段となる。すなわち、吸着具34は、下端面からの吸引によって物品10を吸着するようになっている。また、吸着具34は、補助エア供給源(図示せず)からエアを供給することで、エア流路42の上方に設けた補助エア配管46(図2参照)を介してエア流路42の上部開口からエアを供給する補助エア供給部45(図4参照)を備えている。吸着具34は、物品10の吸着に際して主エア供給部43からエアが供給されて吸着ヘッド40で物品10を吸着する。また、吸着ヘッド40に吸着した物品10を切り離すときは、主エア供給部43からのエアの供給を停止すると共に、このタイミングに合わせて補助エア供給部45からエア流路42にエアを吹き込むことでエア流路42における負圧状態の破壊を補助する。吸着具34の夫々に対して主エア供給部43および補助エア供給部45から独立してエアを供給可能であり、吸着具34毎に物品10の吸着または物品10の解放が行われる。
【0016】
前記ロボット14は、回転体20の回転中において、物品10を吸着した吸着具34を、回動軸28よりも回転体20の回転中心Qに近づけるように回動させながら、吸着具34を、第2コンベヤ16の搬送方向に向けて移動させつつ物品10を載置位置Xに移動させる。また、ロボット14は、物品10を載置位置Xに載置したときの回転体20の回転中心Qと回動軸28とを結ぶ線分に対するアーム32の角度θ1よりも大きく広がるように、アーム32が回動されて、第1コンベヤ12上の物品保持領域Kで搬送される物品10を吸着具34で吸着する。
【0017】
図5に示すように、アーム昇降モータ30とアーム32との間には、アーム昇降モータ30の駆動によってベルト50を介して回転されるプーリ52と、このプーリ52に同軸的に設けられた回転部材54の回転中心から外れた偏心位置に一端56aが回動支持されたクランクバー56からなるクランク機構が設けられ、このクランクバー56の他端56bにアーム32の回動端が接続される。また、クランクバー56の他端56bは、上下方向の移動が許容される一方、他端56bに設けられたローラ58がガイド60によって横方向の移動が規制されることで、回転部材54の回転に伴うクランクバー56の一端56aの回転変位がクランクバー56の他端56bでの上下方向への昇降移動に変換される。アーム32の回動端は、回動軸28の軸方向(上下方向)に沿って移動可能に支持される一方、回動軸28の周方向への回動が規制され、アーム昇降モータ30の駆動によるクランクバー56の他端56bの昇降移動に伴ってアーム32が昇降移動される。クランク機構は、回転部材54における回転中心の上方にクランクバー56の一端56aが位置したときが、吸着具34の上昇位置に対応する原点位置として設定され、このときクランクバー56の他端56bが前記一端56aの斜め下方に位置して、クランクバー56全体が傾斜している。また、クランク機構は、回転部材54における回転中心の下方にクランクバー56の一端56aが位置したときに吸着具34が下降位置となり、この下降位置は、第1コンベヤ12上の物品10の上方に位置して該物品10の上端に接触しない高さに設定される。ここで、吸着具34を昇降させる速度が変化可能に構成されて、例えば後述するロボットコントローラ15からの加減速指令に応じてアーム昇降モータ30を駆動して、吸着具34の下降時に吸着具34の下降速度が変化されると共に、吸着具34の上昇時に吸着具34の上昇速度が変化される。
【0018】
図4に示すように、回転体モータ22、アーム回動モータ26、アーム昇降モータ30、吸着具モータ36、主エア供給部43と補助エア供給部45とを有するエア供給部の夫々が、物品認識手段により得られた物品10の情報に基づいてロボットコントローラ15によって制御される。ロボットコントローラ15は、各種モータ22,26,30,36の駆動指令およびエア供給部43,45へのエアの供給指令および第1コンベヤ12の駆動モータ12aへの駆動指令を行うに当たって、横形製袋充填機において筒状に成形されたフィルム中に供給された物品10をシールや切断等の包装を制御する包装機コントローラ60との間で、夫々の準備状況などの情報を交信し、また、入力される第2コンベヤ16に設けられた原点位置センサによる原点位置やエンコーダ等の情報に応じて動作タイミングを調整する。なお、回転体モータ22、アーム回動モータ26、アーム昇降モータ30および吸着具モータ36は、ロボットコントローラ15によって位置および速度等を制御し得るモータがよく、例えばサーボモータが用いられる。
【0019】
図1に示すように、前記第1コンベヤ12上には、物品検出手段11によって所定時間毎に物品10の搬送状態を撮像する物品認識領域Nと、この物品認識領域Nの下流側に位置して、ロボット14の吸着具34によって物品10を吸着する物品保持領域Kとが設定される。物品認識手段は、物品認識領域Nにおいて、前後左右に不規則な間隔で搬送されてくる物品10の夫々の状態を物品検出手段11によって撮像し、撮像されたデータは撮像される毎に順次ロボットコントローラ15におけるデータ処理部に送信して、データ処理部での処理によって夫々の物品10の位置などを認識する。物品検出手段11としては、CCD等のエリアセンサ、ラインセンサ、X線などの検出方式を採用することできる。物品保持領域Kは、回転体20の回転によるアーム32の移動中に、アーム32自身が所定角度の範囲で回動して物品10を吸着し得る領域であると共に、吸着した物品10をアーム32の回動および吸着具34の回転によって第2コンベヤ16の載置位置Xに載置する準備を完了し得る領域であり、物品認識領域Nより面積が狭く、第1コンベヤ12の左右に広がった物品10を何れも吸着し得る領域として設定されている。
【0020】
前記ロボットコントローラ15は、物品認識手段によって複数の物品10が認識される毎に、物品10を吸着して搬送する順序を決定する。ロボットコントローラ15は、吸着具34によって吸着された物品10が第2コンベヤ16の載置位置Xに載置されてから、その吸着具34を支持するアーム32の回動軸28が反時計方向に進んだ開始位置Aに至るまでに、物品認識手段からの情報によって、物品10を吸着する順序を定めると共に第1コンベヤ12上の複数の物品10の位置から、次に、開始位置Aに至る予定の吸着具34が吸着するべき物品10の位置を算出する。例えば物品認識手段で認識された複数の物品10の吸着順序は、高速処理のため、夫々のアーム32の回動軸28より吸着具34が回転体20の回転中心Qに近くなる後述する最小角度θ1よりアーム32が大きく広がるように大きな角度にアーム32を回動させて、物品保持領域K内の複数の物品10のうち、アーム32の回動軌跡において隣り合う物品10と接触することがなく、かつ回転体20の回転方向で最も遠い物品10から順次、吸着具34で吸着するように決定される。
【0021】
更にロボットコントローラ15においては、吸着具34が開始位置Aに至るまでに物品認識手段により得た情報に第1コンベヤ12の搬送速度等を勘案して算出された次に吸着する物品10の吸着予定の位置(吸着位置)Uに基づいて、該吸着位置Uまでの回転体20の回転中心Qを基点とする回動軸28の開始位置Aからの角度βや、該吸着位置Uで物品10を吸着するときのアーム32の角度θや、吸着具34(アーム32)の昇降タイミングなど、アーム32および吸着具34の様々な動きが決定される。なお、載置位置Xにおいて物品10を特定の方向に向ける際には、吸着位置Uにて吸着する物品10の向きに関する情報に基づいて、吸着具34を回転させる角度等も決定される。
【0022】
物品搬送装置では、吸着具34が前記吸着位置Uで物品10を吸着する際に、アーム32が吸着位置Uに対応する回動角度θより、回転体20の回転方向における前方側に進んだ回動角度(θ+α)(例えばαは5°)に回動され、吸着位置Uで吸着する前後のタイミングで、図3に示すように、アーム32が回動角度(θ+α)から回動角度(θ−α)に、2α分回動される。このことで、吸着具34と物品10の相対速度は、相殺、あるいは低減されることになり、物品10を安定して吸着し得るようになる。
【0023】
前記ロボット14は、物品10を載置位置Xに載置するための準備として、物品認識手段から得られた情報に基づき、アーム32の角度を角度θ1に変更する。アーム32の角度θ1は、設定された所定角度の範囲のアーム32の角度のうちで、アーム32の自由端側の吸着具34が回転体20の回転中心Qに最も近い位置になるときのアーム32の角度である。このため、回転体20の回転中心Qから吸着具34までの距離(R1)は、最も短くなり(R1<回転体20の回転中心Qから回動軸28までの距離)、アーム32の角度θ1における吸着具34の回転速度は最も遅くなる。アーム32の角度を角度θ1にして回転速度を最も遅くする理由は、第2コンベヤ16が各物品10を搬送するタイミングに同期させるためであり、かつ第2コンベヤ16上の物品10の載置位置Xのばらつきを低減させるために重要なことである。
【0024】
前記吸着具34は、図1(b)に示すように、第2コンベヤ16の搬送方向における後方から、移動中の仕切り部材18の上方を移動しながら追い越して降下する。アーム32の角度が角度θ1の状態で吸着具34が降下し終える直前のタイミングで、主エア供給部43からのエアの供給が停止されると共に、補助エア供給部45よりエア流路42の上方からエアが吹き込まれる。補助エア供給部45からのエアの吹き込みにより、短時間でエア流路42内の真空状態を破壊する際に、物品10の載置位置Xが第2コンベヤ16の搬送方向に交差する幅方向にずれることを防止するために、アーム32の角度が、角度θ1より徐々に広がり、図1の二点鎖線に示すように、アーム32は、吸着具34の中心が第2コンベヤ16の中心を搬送方向に向けて、その中心に沿うように直線移動する。吸着具34は、直線移動終了時点のアーム32の角度θn(θnはθ1より僅かに大きい角度で、回転体20の回転中心Qから回動軸28までの距離より短い位置に吸着具34が位置する)を維持した状態で、回転体20の回転によって次の物品10を吸着するために、開始位置Aに向けて移動する。
【0025】
前記吸着位置Uで吸着予定の物品10を吸着し得るタイミングに応じて、吸着具34は下降され、吸着位置Uで物品10を吸着した後に、吸着した物品10が第1コンベヤ12上の隣接する物品10および第2コンベヤ16の仕切り部材18にぶつからない高さまでアーム32と共に上昇される。例えば1分間当たり200個以上の第1コンベヤ12上の物品10を吸着具34で吸着して搬送する高速処理においては、吸着具34が第1コンベヤ12上の物品10に接触することがない上昇位置と下降位置との間で吸着具34を速やかに昇降移動させることが要求されるが、吸着具34を速やかに下降させて下降位置で急停止させる場合には慣性により振動が発生することが予想される。このことから本実施形態では、下降位置付近の吸着具34の移動速度が遅くなるよう、ロボットコントローラ15によってアーム昇降モータ30が変速制御される。
【0026】
具体的には、物品認識手段により得た情報に基づき、一定速度で回転される回転体20の回転中にアーム32を回動させる際に、ロボットコントローラ15からの一定の加速指令あるいは減速指令に応じてアーム昇降モータ30が変速するよう駆動制御され、前記クランク機構が作動することによって、上昇位置から下降位置まで下降して該下降位置から上昇位置まで上昇する吸着具34の昇降サイクルにおいて、吸着具34の昇降速度が正弦波に近似する波形を描くように変化され、吸着具34の高さ位置が余弦波を描くように変化される。図6は、アーム32を前述した2α分回動させることなく、回転体20を一定速度で回転させながら、吸着予定の物品10を吸着具34で吸着する際の該物品10に対する吸着具34の位置変化を示している。図6に示すように、吸着具34は、上限位置から該上限位置と下降位置との間に設定された中途範囲の上限に至るまでは比較的緩やかに下降し、中途範囲においては急激に増速して下降する。そして、中途範囲と下降位置付近の境界にあるP点に吸着具34が移動して該P点から下降位置に移動するにつれて吸着具34の移動速度が徐々に遅くなり、下降位置付近においては前記中途範囲より吸着具34を遅く下降する。前記P点から下降位置までの高さ位置である下降位置付近では、吸着予定の物品10に対向する上方に吸着具34が位置するよう、吸着具34が上昇位置から下降し始めるタイミングがロボットコントローラ15によって毎回決められる。なお、下降位置付近では、吸着具34による吸引力が吸着予定の物品10に作用するが隣接する物品10には作用することがないよう、下降位置付近は、吸着予定の物品10に対する高さ位置などが考慮されて設定されている。下降位置付近の何れかの高さ位置で吸着具34によって物品10が吸着される吸着位置Uが設定されるが、本実施形態では下降位置に吸着位置Uが設定されている。なお、下降位置は、吸着予定の物品10の上端から離れた高い位置に設定されており、吸着具34は吸着位置Uにおいて吸着予定の物品10を浮上させて吸着する。下降位置(吸着位置U)で物品10を吸着した後は、吸着された物品10の下端が第1コンベヤ12上の隣接する物品10の上端を早く越えるよう(図6のC点)、少なくとも下降位置付近で吸着具34を下降時(二点鎖線で示す曲線)より速く移動させるよう、アーム昇降モータ30が駆動制御される。なお、図6において、吸着具34が上昇位置から下降位置まで下降する時間および水平方向に移動する距離と、下降位置から上昇位置まで上昇時間および水平方向に移動する距離とは、夫々同じに設定されており、水平位置に移動する距離については、アーム32を回転体20の回転方向とは逆向きに2α分回動させることによって短縮させるなど任意に調整し得る。
【0027】
次に、実施例に係る物品搬送装置の作用効果について説明する。回転体20の回転中に、アーム32を回動させて回転体20の回転中心Qから吸着具34までの距離を変更すると共に、アーム32の回動角度を設定された所定角度の範囲のアーム32の角度のうち、最小の回動角度θ1にして、吸着具34を第2コンベヤ16の搬送方向に向けて移動させることで、回転体20が回転されることにより物品10に作用する遠心力が小さくなり、第2コンベヤ16の幅方向への物品の位置ずれを低減することができる。また、物品10を載置したときのアーム32の角度θnを基点に、物品10を吸着するときは、アーム32を該角度θnより大きく広がるようにアーム32を回動させることから、関節を有さないタイプの既存のロボットで物品10を吸着する場合と比べて、物品保持領域Kを広く設定することができると共に、基点と物品10を吸着する位置までの位置関係を演算処理し易くなるので高速処理が可能になる。物品搬送装置は、一定方向に定速回転する回転体20に対して回動可能なアーム32の自由端側に配設された吸着具34で物品10を吸着するロボット14を用いるため、関節を有さないタイプの既存のロボット(アーム32に相当する腕を有さず、回転体20に吸着手段が配設されたロボット)に比べた場合に、物品10を吸着するときは、吸着具34が第1コンベヤ12の広範囲を高速で移動して物品10を吸着し、物品10を載置位置Xに載置するときには、吸着するときの速度より減速して第2コンベヤ16に物品10を確実に載置し得る。そして、夫々の吸着具34によって吸着された物品10が、第2コンベヤ16の各仕切り部材18,18間に連続して載置されることによって、高速処理においても横形製袋充填機での空袋の発生を防ぐことができる。また、吸着具34の中心が第2コンベヤ16の搬送中心に沿って移動しながら、吸着具34が吸着を解除し、物品10を解放することによって、左右に位置ずれすることなく、物品10を第2コンベヤ16上に載置することができる。よって、筒状フィルムの開口の大きさに余裕をもたせなくても、筒状フィルムに物品10を供給して、適切にフィルムを消費しながら高速でフィルム包装することが可能になる。
【0028】
前記物品搬送装置は、アーム32の角度θ1を最小角度として、各アーム32を該最小角度θ1から隣のアーム32に干渉することがない角度だけ同じ向きに回動させて、物品保持領域Kの物品10を吸着するように、アーム32が回動する所定角度を規定しているので、最小角度から物品10を吸着する位置までの位置関係が演算処理しや易くなるので高速処理が可能になる。また、隣り合うアーム32,32同士の衝突を回避できる。物品搬送装置は、回転体20の回転中心Qに対して、アーム32の回動軸28より遠い位置で物品保持領域Kの物品10を吸着具34で吸着する際に、回転体20の回転方向と逆方向にアーム32を回動させて物品10に対する吸着具34の相対速度を小さくすることで、位置ずれが起き難くなる。
【0029】
前述したように、吸着具34の移動速度を中途範囲で急激に増速し、下降位置付近で徐々に緩やかに減速させることにより、高速処理に対応し得るように吸着具34を下降させることができるとと共に、吸着具34を下降位置に下降した際の慣性力を低減することができ、振動などの発生を抑制することができる。また、高速処理においては、中途範囲で少なくとも吸着具34に吸引力を発生させた状態で吸着具34が吸引しながら吸着予定の物品10の斜め上方から下降するが、吸着具34が上昇位置では遅く中途範囲で急激に下降することから、吸着予定の物品10に隣接する物品10には吸引力が作用し難く、隣接する物品10の姿勢を乱すことはない。このことは、特に重さ等が異なる物品10が第1コンベヤ12上に混在した中から、重量が嵩む物品10を比較的大きな吸引力で吸着する際などに有効である。更に下降位置が物品10の上端に接触しない高さに設定されているから、下降位置付近となる吸着位置において、吸着具34で物品10を吸着する際に、物品10を吸着具34でコンベヤの搬送面に押さえ付けることがないので、物品10に負荷を与えることはなく、また安定した姿勢で物品10を吸着することができる。吸着位置Uで吸着した物品10を上昇させる際に、吸着した物品10の下端が第1コンベヤ12上の隣接する物品10の上端に接触しない高さ範囲まで吸着具34が高速で上昇されるので、吸着具34で吸着した物品10を載置位置Xに搬送するときに、第1コンベヤ12上の物品10に接触することを回避できる。
【0030】
(変更例)
本発明は実施例の構成に限定されるものではなく、例えば、以下のようにも変更実施可能である。なお、以下の変更例に限らず、実施例に記載した構成については、本発明の主旨の範囲内において種々の実施形態を採用し得る。
(1)ロボット14は例示であり、アーム32は回転体20に等間隔角度に回転支持されるものであればよく、その数は限定されず、回転中心Qに複数の回転体20を設けて、それぞれの回転体にアーム32を回転支持させ、アーム32が等間隔角度で配置されるようにしてもよい。なお、アーム32は同種のものが好ましい。
(2)回転体20に回動支持される各アーム32に、更に、別のアームを接続して、別のアームを回動駆動させて物品10を吸着させてもよい。
(3)第1コンベヤ12に対して第2コンベヤ16を平行にして配設したが、吸着具34の移動軌跡の接線上に載置位置Xがあれば、第1コンベヤ12に対して第2コンベヤ16を、例えば、交差するように配置してもよい。
(4)第2コンベヤ16上には、物品10を一列に配置しているが、複数列に配置して搬送するように構成してもよいし、第2コンベヤ16に収納箱やトレーなどの容器を載置し、その箱や容器などの内部に物品10を配列し、収納が終了したら次の箱や容器などに入れるように構成してもよい。
(5)アーム32と吸着具34を一緒に昇降させたが、吸着具34だけを昇降させる昇降手段でもよい。この場合、モータに替えて、エアシリンダなどで吸着具34を昇降させてもよい。
(6)第2コンベヤ16の仕切り部材18のピッチを変更する場合は、アーム32の回動角度を変更して、回転体20の回転中心Qから第2コンベヤ16の搬送中心に沿って移動する吸着具34の中心までの距離を変更すればよい。吸着具34の移動軌跡の接線上を仕切り部材18が移動する関係にすればよい。
(7)物品保持領域Kで物品10を吸着する順序は、物品保持領域Kに置かれた物品10の中で、回転体20の回転に伴うアーム32の回転方向前方側に障害となる物品10がない最も外側から順に吸着すればよい。また、搬送方向に物品10が複数個並ぶ物品保持領域Kにおいては、障害となる物品がない最も外側のうち、下流側から吸着すればよい。また、回動軸28から回転体20の回転中心Qまでの距離を長くして、隣のアーム32と干渉しないようにすれば、各アーム32の回動する方向を自由に設定してもよい。
(8)包装機は第2コンベヤ16に載置した物品10を筒状フィルム中に供給して、フィルム包装する横形製袋充填機に限定されるものではなく、例えば、第2コンベヤ16によって搬送された物品10を箱詰めする箱詰め包装機などでもよい。
【0031】
(9)複数種類の物品10が混在して第1コンベヤ12で搬送される場合は、物品10の種類に応じて回転体20の回転中心Qと回動軸28とを結ぶ線分に対するアーム32の角度を異ならせてアーム32を回動させて物品10を載置位置Xに載置させてもよい。吸着具34が回転軸28よりも回転体20の回転中心Qから離れる位置に載置位置Xを設定してもよい。
(10)載置位置Xは、第2コンベヤ16で例示したベルトコンベヤ等の搬送面に設定するのではなく、プッシャコンベヤの押送部材で物品10が押送されるベッド上に設定してもよく、単なる固定台上に設定して、別のロボットハンドで物品10を移動してもよい。
【0032】
(11)余弦波に近似する波形で吸着具34を移動させたが、例えば上昇位置から図6のP点まで直線的に移動させてもよい。また吸着具34の移動速度を加減速させるにあたっては一定に限ることなく、様々な設定を行ってもよい。
(12)吸着具を昇降させる機構は、クランク機構に代えてカム機構やその他の機構などで吸着具の移動速度を加減速させてもよい。
(13)吸着具34の下降位置をコンベヤ12上にある物品10の上端の高さに合わせて設定してもよい。
【符号の説明】
【0033】
10 物品,12 第1コンベヤ(コンベヤ),20 回転体,
30 アーム昇降モータ(モータ),32 アーム,34 吸着具,Q 回転中心,
U 吸着位置
【技術分野】
【0001】
この発明は、物品を高速で搬送し得る物品搬送装置に関するものである。
【背景技術】
【0002】
コンベヤ上をランダムに搬送される物品をCCDカメラ等の撮像手段で撮像し、その撮像した情報に基づき、ロボットのアームを回動させて該アームに設けられた吸着具で物品を吸着し、該物品を別のコンベヤに移載する装置が知られている(例えば、特許文献1参照)。特許文献1に開示の装置は、撮像手段で撮像した第1コンベヤ上の物品の情報に基づき、ロボットにおける1つのアームを回動させて、第1コンベヤにおいて搬送方向における前後左右に不規則な間隔で搬送される物品の中から特定の物品を吸着し、アームを第2コンベヤへ向けて回動させて、物品を第2コンベヤに載置している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−160416号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示の装置は、第1コンベヤと第2コンベヤとの間をロボットの1つのアームが行き戻りして物品を搬送するので、後工程が高速で処理する際に、その高速処理に対応するように夫々の物品を高速で吸着して搬送することができない。そして、ロボットで吸着できなかった物品は、回収装置により頻繁に回収されることになるので、物品を第1コンベヤから第2コンベヤへ効率的に受け渡すことができない。
【0005】
すなわち本発明は、従来の技術に係る物品搬送装置に内在する前記問題に鑑み、これらを好適に解決するべく提案されたものであって、任意の間隔で搬送されてきた物品であっても、吸着して高速で搬送することができる物品搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記課題を克服し、所期の目的を達成するため、本願の請求項1に係る発明の物品搬送装置は、
上下方向の軸周りを一定方向に回転する回転体と、
該回転体の回転中心から離れて回転体に対して回動可能に支持され、上下方向の軸周りに夫々独立して回動される複数のアームと、
各アームに設けられ、モータの駆動により上昇位置と下降位置との間で昇降移動される吸着具と、
任意の間隔でコンベヤ上を搬送される物品の位置を認識する物品認識手段とを備え、
前記物品認識手段により得た情報に基づき、前記回転体の回転中に前記アームを回動させて吸着予定の物品に対向する吸着位置において該物品を吸着具で吸着するに際して、前記上昇位置と前記下降位置との間の中途範囲において吸着予定の物品の斜め上方から前記吸着位置を含む下降位置付近に向けて吸引しながら該吸着具を下降させ、該下降位置付近にて前記中途範囲よりも該吸着具を遅く下降させるように前記モータを変速制御して、前記物品を吸着することを特徴とする。
請求項1に係る発明によれば、コンベヤ上を任意の間隔で物品が搬送されてきても、物品を安定した姿勢で吸着して、物品を高速で搬送することができる。また物品の吸着に際して、吸着予定の物品以外の物品に対して吸引による影響を与え難い。
【0007】
請求項2に係る発明では、前記下降位置が前記吸着予定の物品から離れた高い位置に設定されて、前記吸着具は、前記吸着位置で前記物品を浮上させて吸着することを特徴とする。
請求項2に係る発明によれば、物品を吸着する際に、物品を吸着具でコンベヤの搬送面に押さえ付けることがないので、物品に負荷を与えることはなく、また安定した姿勢で物品を吸着することができる。
【0008】
請求項3に係る発明では、前記吸着具で吸着した物品を上昇させる際に、該物品の下端がコンベヤ上の隣接する物品の上端を越えるまでの高さ範囲においては、前記吸着具を下降させる場合より上昇させるほうが吸着具の移動速度が速くなるよう前記モータを変速制御することを特徴とする。
請求項3に係る発明によれば、吸着した物品を上昇させる際に、コンベヤ上の隣接する物品に接触することを回避できる。
【0009】
請求項4に係る発明では、前記回転体の回転方向とは反対方向に前記アームを回動させて、前記吸着具によって吸着予定の物品が吸着されることを特徴とする。
請求項4に係る発明によれば、物品を吸着具で吸着する際に、回転体の回転方向と逆方向にアームを回動させて物品に対する吸着具の相対速度を小さくすることで、物品を安定した姿勢で吸着することができる。
【発明の効果】
【0010】
本発明に係る物品搬送装置によれば、コンベヤ上を任意の間隔で物品が搬送されてきても、物品を安定した姿勢で吸着して、物品を高速で搬送することができる。
【図面の簡単な説明】
【0011】
【図1】(a)は本発明の好適な実施例に係る物品搬送装置を示す概略平面図であり、(b)は第2コンベヤの概略正面図である。
【図2】実施例の物品搬送装置の概略正面図である。
【図3】第1コンベヤ上の物品を吸着具で吸着する際のアームの動きを示す説明図である。
【図4】実施例の物品搬送装置の制御ブロック図である。
【図5】(a)は実施例のクランク機構を示す概略正面図であり、(b)は実施例のクランク機構を示す概略側面図である。
【図6】吸着具の速度変化を示す説明図である。
【発明を実施するための形態】
【0012】
次に、本発明に係る物品搬送装置につき、好適な実施例を挙げて、添付図面を参照して以下に説明する。
【実施例】
【0013】
図1および図2に示すように、物品搬送装置は、複数の物品10を所定速度で搬送するベルトコンベヤからなる第1コンベヤ(コンベヤ)12と、第1コンベヤ12上から物品10を受け取って、該物品10を載置位置Xに受け渡すように搬送するロボット14とを備えている。実施例では、物品10が毎回同じ位置に載置されるように載置位置Xが第1コンベヤ12に隣接配置された第2コンベヤ16の上流部に設定され、第2コンベヤ16において所定間隔毎に配設された仕切部材18,18の間になるタイミングで載置位置Xに物品10が載置される(図1(b)参照)。第1コンベヤ12において、その搬送方向における前後左右に不規則な間隔(任意の間隔)で複数の物品10が搬送される。第2コンベヤ16は、載置位置Xで仕切部材18,18間に1個ずつ載置された物品10を一列で搬送し、横形製袋充填機における筒状フィルム中に物品10を所定間隔毎に供給するようになっている。
【0014】
前記ロボット14は、架台(図示せず)に対して取り付けてあり、上下方向の軸周りに回転可能に配設された回転体20を備えている(図1または図2参照)。回転体20は、回転体モータ22の駆動を受けて、一定方向(実施例では図1の反時計回り)に一定速度で回転する。回転体20には、半径方向外側に延出するよう形成された4つの同じ形状の支持部24が設けられている。各支持部24には、該支持部24に対して上下方向に軸線が延在する回動軸28が、回転体20の回転中心Qから同じ距離だけ離れて、該回転中心Qを中心に等角度間隔で支持されている。回動軸28は、各支持部24に配設されたアーム回動モータ26の駆動力を受けて回動される。また各回動軸28には、アーム昇降モータ30の駆動を受けて回動軸28に沿って昇降可能なアーム32が配設されている。各アーム32は、対応のアーム回動モータ26の駆動を受けて回動軸28と共に該回動軸28を中心として水平方向に夫々独立して所定角度回動するよう構成され、アーム32の回動角度は、隣接するアーム32と接触しないように設定されている。
【0015】
図1に示すように、各アーム32には、対応の回動軸28から同じ距離だけ離れた該アーム32の自由端側に、吸着具34がアーム32に対して回転可能に設けられ、吸着具モータ36からの駆動力を受けて吸着具34が上下方向の軸周りに回転される。また、対応のアーム昇降モータ30の駆動によってアーム32が昇降移動されるのに伴って、アーム32の自由端側に設けられた吸着具34が上昇位置と下降位置との間で昇降移動される。吸着具34は、アーム32に支持された管状本体38の下端に吸着ヘッド40が着脱可能に取り付けられ、管状本体38および吸着ヘッド40の内部に、上下に貫通するエア流路42を備えている。なお、吸着ヘッド40は、搬送する物品10の形状や硬さ等の性状に応じて着脱交換される。吸着具34は、管状本体38の下部側面に接続されたエア配管44(図2参照)を介してコンプレッサー等のエア供給源(図示せず)からエア流路42に側方からエアを供給する主エア供給部43(図4参照)を備え、主エア供給部43のエアの供給によって吸着ヘッド40の下端面において負圧が発生する所謂エジェクタ型の真空発生手段となる。すなわち、吸着具34は、下端面からの吸引によって物品10を吸着するようになっている。また、吸着具34は、補助エア供給源(図示せず)からエアを供給することで、エア流路42の上方に設けた補助エア配管46(図2参照)を介してエア流路42の上部開口からエアを供給する補助エア供給部45(図4参照)を備えている。吸着具34は、物品10の吸着に際して主エア供給部43からエアが供給されて吸着ヘッド40で物品10を吸着する。また、吸着ヘッド40に吸着した物品10を切り離すときは、主エア供給部43からのエアの供給を停止すると共に、このタイミングに合わせて補助エア供給部45からエア流路42にエアを吹き込むことでエア流路42における負圧状態の破壊を補助する。吸着具34の夫々に対して主エア供給部43および補助エア供給部45から独立してエアを供給可能であり、吸着具34毎に物品10の吸着または物品10の解放が行われる。
【0016】
前記ロボット14は、回転体20の回転中において、物品10を吸着した吸着具34を、回動軸28よりも回転体20の回転中心Qに近づけるように回動させながら、吸着具34を、第2コンベヤ16の搬送方向に向けて移動させつつ物品10を載置位置Xに移動させる。また、ロボット14は、物品10を載置位置Xに載置したときの回転体20の回転中心Qと回動軸28とを結ぶ線分に対するアーム32の角度θ1よりも大きく広がるように、アーム32が回動されて、第1コンベヤ12上の物品保持領域Kで搬送される物品10を吸着具34で吸着する。
【0017】
図5に示すように、アーム昇降モータ30とアーム32との間には、アーム昇降モータ30の駆動によってベルト50を介して回転されるプーリ52と、このプーリ52に同軸的に設けられた回転部材54の回転中心から外れた偏心位置に一端56aが回動支持されたクランクバー56からなるクランク機構が設けられ、このクランクバー56の他端56bにアーム32の回動端が接続される。また、クランクバー56の他端56bは、上下方向の移動が許容される一方、他端56bに設けられたローラ58がガイド60によって横方向の移動が規制されることで、回転部材54の回転に伴うクランクバー56の一端56aの回転変位がクランクバー56の他端56bでの上下方向への昇降移動に変換される。アーム32の回動端は、回動軸28の軸方向(上下方向)に沿って移動可能に支持される一方、回動軸28の周方向への回動が規制され、アーム昇降モータ30の駆動によるクランクバー56の他端56bの昇降移動に伴ってアーム32が昇降移動される。クランク機構は、回転部材54における回転中心の上方にクランクバー56の一端56aが位置したときが、吸着具34の上昇位置に対応する原点位置として設定され、このときクランクバー56の他端56bが前記一端56aの斜め下方に位置して、クランクバー56全体が傾斜している。また、クランク機構は、回転部材54における回転中心の下方にクランクバー56の一端56aが位置したときに吸着具34が下降位置となり、この下降位置は、第1コンベヤ12上の物品10の上方に位置して該物品10の上端に接触しない高さに設定される。ここで、吸着具34を昇降させる速度が変化可能に構成されて、例えば後述するロボットコントローラ15からの加減速指令に応じてアーム昇降モータ30を駆動して、吸着具34の下降時に吸着具34の下降速度が変化されると共に、吸着具34の上昇時に吸着具34の上昇速度が変化される。
【0018】
図4に示すように、回転体モータ22、アーム回動モータ26、アーム昇降モータ30、吸着具モータ36、主エア供給部43と補助エア供給部45とを有するエア供給部の夫々が、物品認識手段により得られた物品10の情報に基づいてロボットコントローラ15によって制御される。ロボットコントローラ15は、各種モータ22,26,30,36の駆動指令およびエア供給部43,45へのエアの供給指令および第1コンベヤ12の駆動モータ12aへの駆動指令を行うに当たって、横形製袋充填機において筒状に成形されたフィルム中に供給された物品10をシールや切断等の包装を制御する包装機コントローラ60との間で、夫々の準備状況などの情報を交信し、また、入力される第2コンベヤ16に設けられた原点位置センサによる原点位置やエンコーダ等の情報に応じて動作タイミングを調整する。なお、回転体モータ22、アーム回動モータ26、アーム昇降モータ30および吸着具モータ36は、ロボットコントローラ15によって位置および速度等を制御し得るモータがよく、例えばサーボモータが用いられる。
【0019】
図1に示すように、前記第1コンベヤ12上には、物品検出手段11によって所定時間毎に物品10の搬送状態を撮像する物品認識領域Nと、この物品認識領域Nの下流側に位置して、ロボット14の吸着具34によって物品10を吸着する物品保持領域Kとが設定される。物品認識手段は、物品認識領域Nにおいて、前後左右に不規則な間隔で搬送されてくる物品10の夫々の状態を物品検出手段11によって撮像し、撮像されたデータは撮像される毎に順次ロボットコントローラ15におけるデータ処理部に送信して、データ処理部での処理によって夫々の物品10の位置などを認識する。物品検出手段11としては、CCD等のエリアセンサ、ラインセンサ、X線などの検出方式を採用することできる。物品保持領域Kは、回転体20の回転によるアーム32の移動中に、アーム32自身が所定角度の範囲で回動して物品10を吸着し得る領域であると共に、吸着した物品10をアーム32の回動および吸着具34の回転によって第2コンベヤ16の載置位置Xに載置する準備を完了し得る領域であり、物品認識領域Nより面積が狭く、第1コンベヤ12の左右に広がった物品10を何れも吸着し得る領域として設定されている。
【0020】
前記ロボットコントローラ15は、物品認識手段によって複数の物品10が認識される毎に、物品10を吸着して搬送する順序を決定する。ロボットコントローラ15は、吸着具34によって吸着された物品10が第2コンベヤ16の載置位置Xに載置されてから、その吸着具34を支持するアーム32の回動軸28が反時計方向に進んだ開始位置Aに至るまでに、物品認識手段からの情報によって、物品10を吸着する順序を定めると共に第1コンベヤ12上の複数の物品10の位置から、次に、開始位置Aに至る予定の吸着具34が吸着するべき物品10の位置を算出する。例えば物品認識手段で認識された複数の物品10の吸着順序は、高速処理のため、夫々のアーム32の回動軸28より吸着具34が回転体20の回転中心Qに近くなる後述する最小角度θ1よりアーム32が大きく広がるように大きな角度にアーム32を回動させて、物品保持領域K内の複数の物品10のうち、アーム32の回動軌跡において隣り合う物品10と接触することがなく、かつ回転体20の回転方向で最も遠い物品10から順次、吸着具34で吸着するように決定される。
【0021】
更にロボットコントローラ15においては、吸着具34が開始位置Aに至るまでに物品認識手段により得た情報に第1コンベヤ12の搬送速度等を勘案して算出された次に吸着する物品10の吸着予定の位置(吸着位置)Uに基づいて、該吸着位置Uまでの回転体20の回転中心Qを基点とする回動軸28の開始位置Aからの角度βや、該吸着位置Uで物品10を吸着するときのアーム32の角度θや、吸着具34(アーム32)の昇降タイミングなど、アーム32および吸着具34の様々な動きが決定される。なお、載置位置Xにおいて物品10を特定の方向に向ける際には、吸着位置Uにて吸着する物品10の向きに関する情報に基づいて、吸着具34を回転させる角度等も決定される。
【0022】
物品搬送装置では、吸着具34が前記吸着位置Uで物品10を吸着する際に、アーム32が吸着位置Uに対応する回動角度θより、回転体20の回転方向における前方側に進んだ回動角度(θ+α)(例えばαは5°)に回動され、吸着位置Uで吸着する前後のタイミングで、図3に示すように、アーム32が回動角度(θ+α)から回動角度(θ−α)に、2α分回動される。このことで、吸着具34と物品10の相対速度は、相殺、あるいは低減されることになり、物品10を安定して吸着し得るようになる。
【0023】
前記ロボット14は、物品10を載置位置Xに載置するための準備として、物品認識手段から得られた情報に基づき、アーム32の角度を角度θ1に変更する。アーム32の角度θ1は、設定された所定角度の範囲のアーム32の角度のうちで、アーム32の自由端側の吸着具34が回転体20の回転中心Qに最も近い位置になるときのアーム32の角度である。このため、回転体20の回転中心Qから吸着具34までの距離(R1)は、最も短くなり(R1<回転体20の回転中心Qから回動軸28までの距離)、アーム32の角度θ1における吸着具34の回転速度は最も遅くなる。アーム32の角度を角度θ1にして回転速度を最も遅くする理由は、第2コンベヤ16が各物品10を搬送するタイミングに同期させるためであり、かつ第2コンベヤ16上の物品10の載置位置Xのばらつきを低減させるために重要なことである。
【0024】
前記吸着具34は、図1(b)に示すように、第2コンベヤ16の搬送方向における後方から、移動中の仕切り部材18の上方を移動しながら追い越して降下する。アーム32の角度が角度θ1の状態で吸着具34が降下し終える直前のタイミングで、主エア供給部43からのエアの供給が停止されると共に、補助エア供給部45よりエア流路42の上方からエアが吹き込まれる。補助エア供給部45からのエアの吹き込みにより、短時間でエア流路42内の真空状態を破壊する際に、物品10の載置位置Xが第2コンベヤ16の搬送方向に交差する幅方向にずれることを防止するために、アーム32の角度が、角度θ1より徐々に広がり、図1の二点鎖線に示すように、アーム32は、吸着具34の中心が第2コンベヤ16の中心を搬送方向に向けて、その中心に沿うように直線移動する。吸着具34は、直線移動終了時点のアーム32の角度θn(θnはθ1より僅かに大きい角度で、回転体20の回転中心Qから回動軸28までの距離より短い位置に吸着具34が位置する)を維持した状態で、回転体20の回転によって次の物品10を吸着するために、開始位置Aに向けて移動する。
【0025】
前記吸着位置Uで吸着予定の物品10を吸着し得るタイミングに応じて、吸着具34は下降され、吸着位置Uで物品10を吸着した後に、吸着した物品10が第1コンベヤ12上の隣接する物品10および第2コンベヤ16の仕切り部材18にぶつからない高さまでアーム32と共に上昇される。例えば1分間当たり200個以上の第1コンベヤ12上の物品10を吸着具34で吸着して搬送する高速処理においては、吸着具34が第1コンベヤ12上の物品10に接触することがない上昇位置と下降位置との間で吸着具34を速やかに昇降移動させることが要求されるが、吸着具34を速やかに下降させて下降位置で急停止させる場合には慣性により振動が発生することが予想される。このことから本実施形態では、下降位置付近の吸着具34の移動速度が遅くなるよう、ロボットコントローラ15によってアーム昇降モータ30が変速制御される。
【0026】
具体的には、物品認識手段により得た情報に基づき、一定速度で回転される回転体20の回転中にアーム32を回動させる際に、ロボットコントローラ15からの一定の加速指令あるいは減速指令に応じてアーム昇降モータ30が変速するよう駆動制御され、前記クランク機構が作動することによって、上昇位置から下降位置まで下降して該下降位置から上昇位置まで上昇する吸着具34の昇降サイクルにおいて、吸着具34の昇降速度が正弦波に近似する波形を描くように変化され、吸着具34の高さ位置が余弦波を描くように変化される。図6は、アーム32を前述した2α分回動させることなく、回転体20を一定速度で回転させながら、吸着予定の物品10を吸着具34で吸着する際の該物品10に対する吸着具34の位置変化を示している。図6に示すように、吸着具34は、上限位置から該上限位置と下降位置との間に設定された中途範囲の上限に至るまでは比較的緩やかに下降し、中途範囲においては急激に増速して下降する。そして、中途範囲と下降位置付近の境界にあるP点に吸着具34が移動して該P点から下降位置に移動するにつれて吸着具34の移動速度が徐々に遅くなり、下降位置付近においては前記中途範囲より吸着具34を遅く下降する。前記P点から下降位置までの高さ位置である下降位置付近では、吸着予定の物品10に対向する上方に吸着具34が位置するよう、吸着具34が上昇位置から下降し始めるタイミングがロボットコントローラ15によって毎回決められる。なお、下降位置付近では、吸着具34による吸引力が吸着予定の物品10に作用するが隣接する物品10には作用することがないよう、下降位置付近は、吸着予定の物品10に対する高さ位置などが考慮されて設定されている。下降位置付近の何れかの高さ位置で吸着具34によって物品10が吸着される吸着位置Uが設定されるが、本実施形態では下降位置に吸着位置Uが設定されている。なお、下降位置は、吸着予定の物品10の上端から離れた高い位置に設定されており、吸着具34は吸着位置Uにおいて吸着予定の物品10を浮上させて吸着する。下降位置(吸着位置U)で物品10を吸着した後は、吸着された物品10の下端が第1コンベヤ12上の隣接する物品10の上端を早く越えるよう(図6のC点)、少なくとも下降位置付近で吸着具34を下降時(二点鎖線で示す曲線)より速く移動させるよう、アーム昇降モータ30が駆動制御される。なお、図6において、吸着具34が上昇位置から下降位置まで下降する時間および水平方向に移動する距離と、下降位置から上昇位置まで上昇時間および水平方向に移動する距離とは、夫々同じに設定されており、水平位置に移動する距離については、アーム32を回転体20の回転方向とは逆向きに2α分回動させることによって短縮させるなど任意に調整し得る。
【0027】
次に、実施例に係る物品搬送装置の作用効果について説明する。回転体20の回転中に、アーム32を回動させて回転体20の回転中心Qから吸着具34までの距離を変更すると共に、アーム32の回動角度を設定された所定角度の範囲のアーム32の角度のうち、最小の回動角度θ1にして、吸着具34を第2コンベヤ16の搬送方向に向けて移動させることで、回転体20が回転されることにより物品10に作用する遠心力が小さくなり、第2コンベヤ16の幅方向への物品の位置ずれを低減することができる。また、物品10を載置したときのアーム32の角度θnを基点に、物品10を吸着するときは、アーム32を該角度θnより大きく広がるようにアーム32を回動させることから、関節を有さないタイプの既存のロボットで物品10を吸着する場合と比べて、物品保持領域Kを広く設定することができると共に、基点と物品10を吸着する位置までの位置関係を演算処理し易くなるので高速処理が可能になる。物品搬送装置は、一定方向に定速回転する回転体20に対して回動可能なアーム32の自由端側に配設された吸着具34で物品10を吸着するロボット14を用いるため、関節を有さないタイプの既存のロボット(アーム32に相当する腕を有さず、回転体20に吸着手段が配設されたロボット)に比べた場合に、物品10を吸着するときは、吸着具34が第1コンベヤ12の広範囲を高速で移動して物品10を吸着し、物品10を載置位置Xに載置するときには、吸着するときの速度より減速して第2コンベヤ16に物品10を確実に載置し得る。そして、夫々の吸着具34によって吸着された物品10が、第2コンベヤ16の各仕切り部材18,18間に連続して載置されることによって、高速処理においても横形製袋充填機での空袋の発生を防ぐことができる。また、吸着具34の中心が第2コンベヤ16の搬送中心に沿って移動しながら、吸着具34が吸着を解除し、物品10を解放することによって、左右に位置ずれすることなく、物品10を第2コンベヤ16上に載置することができる。よって、筒状フィルムの開口の大きさに余裕をもたせなくても、筒状フィルムに物品10を供給して、適切にフィルムを消費しながら高速でフィルム包装することが可能になる。
【0028】
前記物品搬送装置は、アーム32の角度θ1を最小角度として、各アーム32を該最小角度θ1から隣のアーム32に干渉することがない角度だけ同じ向きに回動させて、物品保持領域Kの物品10を吸着するように、アーム32が回動する所定角度を規定しているので、最小角度から物品10を吸着する位置までの位置関係が演算処理しや易くなるので高速処理が可能になる。また、隣り合うアーム32,32同士の衝突を回避できる。物品搬送装置は、回転体20の回転中心Qに対して、アーム32の回動軸28より遠い位置で物品保持領域Kの物品10を吸着具34で吸着する際に、回転体20の回転方向と逆方向にアーム32を回動させて物品10に対する吸着具34の相対速度を小さくすることで、位置ずれが起き難くなる。
【0029】
前述したように、吸着具34の移動速度を中途範囲で急激に増速し、下降位置付近で徐々に緩やかに減速させることにより、高速処理に対応し得るように吸着具34を下降させることができるとと共に、吸着具34を下降位置に下降した際の慣性力を低減することができ、振動などの発生を抑制することができる。また、高速処理においては、中途範囲で少なくとも吸着具34に吸引力を発生させた状態で吸着具34が吸引しながら吸着予定の物品10の斜め上方から下降するが、吸着具34が上昇位置では遅く中途範囲で急激に下降することから、吸着予定の物品10に隣接する物品10には吸引力が作用し難く、隣接する物品10の姿勢を乱すことはない。このことは、特に重さ等が異なる物品10が第1コンベヤ12上に混在した中から、重量が嵩む物品10を比較的大きな吸引力で吸着する際などに有効である。更に下降位置が物品10の上端に接触しない高さに設定されているから、下降位置付近となる吸着位置において、吸着具34で物品10を吸着する際に、物品10を吸着具34でコンベヤの搬送面に押さえ付けることがないので、物品10に負荷を与えることはなく、また安定した姿勢で物品10を吸着することができる。吸着位置Uで吸着した物品10を上昇させる際に、吸着した物品10の下端が第1コンベヤ12上の隣接する物品10の上端に接触しない高さ範囲まで吸着具34が高速で上昇されるので、吸着具34で吸着した物品10を載置位置Xに搬送するときに、第1コンベヤ12上の物品10に接触することを回避できる。
【0030】
(変更例)
本発明は実施例の構成に限定されるものではなく、例えば、以下のようにも変更実施可能である。なお、以下の変更例に限らず、実施例に記載した構成については、本発明の主旨の範囲内において種々の実施形態を採用し得る。
(1)ロボット14は例示であり、アーム32は回転体20に等間隔角度に回転支持されるものであればよく、その数は限定されず、回転中心Qに複数の回転体20を設けて、それぞれの回転体にアーム32を回転支持させ、アーム32が等間隔角度で配置されるようにしてもよい。なお、アーム32は同種のものが好ましい。
(2)回転体20に回動支持される各アーム32に、更に、別のアームを接続して、別のアームを回動駆動させて物品10を吸着させてもよい。
(3)第1コンベヤ12に対して第2コンベヤ16を平行にして配設したが、吸着具34の移動軌跡の接線上に載置位置Xがあれば、第1コンベヤ12に対して第2コンベヤ16を、例えば、交差するように配置してもよい。
(4)第2コンベヤ16上には、物品10を一列に配置しているが、複数列に配置して搬送するように構成してもよいし、第2コンベヤ16に収納箱やトレーなどの容器を載置し、その箱や容器などの内部に物品10を配列し、収納が終了したら次の箱や容器などに入れるように構成してもよい。
(5)アーム32と吸着具34を一緒に昇降させたが、吸着具34だけを昇降させる昇降手段でもよい。この場合、モータに替えて、エアシリンダなどで吸着具34を昇降させてもよい。
(6)第2コンベヤ16の仕切り部材18のピッチを変更する場合は、アーム32の回動角度を変更して、回転体20の回転中心Qから第2コンベヤ16の搬送中心に沿って移動する吸着具34の中心までの距離を変更すればよい。吸着具34の移動軌跡の接線上を仕切り部材18が移動する関係にすればよい。
(7)物品保持領域Kで物品10を吸着する順序は、物品保持領域Kに置かれた物品10の中で、回転体20の回転に伴うアーム32の回転方向前方側に障害となる物品10がない最も外側から順に吸着すればよい。また、搬送方向に物品10が複数個並ぶ物品保持領域Kにおいては、障害となる物品がない最も外側のうち、下流側から吸着すればよい。また、回動軸28から回転体20の回転中心Qまでの距離を長くして、隣のアーム32と干渉しないようにすれば、各アーム32の回動する方向を自由に設定してもよい。
(8)包装機は第2コンベヤ16に載置した物品10を筒状フィルム中に供給して、フィルム包装する横形製袋充填機に限定されるものではなく、例えば、第2コンベヤ16によって搬送された物品10を箱詰めする箱詰め包装機などでもよい。
【0031】
(9)複数種類の物品10が混在して第1コンベヤ12で搬送される場合は、物品10の種類に応じて回転体20の回転中心Qと回動軸28とを結ぶ線分に対するアーム32の角度を異ならせてアーム32を回動させて物品10を載置位置Xに載置させてもよい。吸着具34が回転軸28よりも回転体20の回転中心Qから離れる位置に載置位置Xを設定してもよい。
(10)載置位置Xは、第2コンベヤ16で例示したベルトコンベヤ等の搬送面に設定するのではなく、プッシャコンベヤの押送部材で物品10が押送されるベッド上に設定してもよく、単なる固定台上に設定して、別のロボットハンドで物品10を移動してもよい。
【0032】
(11)余弦波に近似する波形で吸着具34を移動させたが、例えば上昇位置から図6のP点まで直線的に移動させてもよい。また吸着具34の移動速度を加減速させるにあたっては一定に限ることなく、様々な設定を行ってもよい。
(12)吸着具を昇降させる機構は、クランク機構に代えてカム機構やその他の機構などで吸着具の移動速度を加減速させてもよい。
(13)吸着具34の下降位置をコンベヤ12上にある物品10の上端の高さに合わせて設定してもよい。
【符号の説明】
【0033】
10 物品,12 第1コンベヤ(コンベヤ),20 回転体,
30 アーム昇降モータ(モータ),32 アーム,34 吸着具,Q 回転中心,
U 吸着位置
【特許請求の範囲】
【請求項1】
上下方向の軸周りを一定方向に回転する回転体(20)と、
該回転体(20)の回転中心(Q)から離れて回転体(20)に対して回動可能に支持され、上下方向の軸周りに夫々独立して回動される複数のアーム(32)と、
各アーム(32)に設けられ、モータ(30)の駆動により上昇位置と下降位置との間で昇降移動される吸着具(34)と、
任意の間隔でコンベヤ(12)上を搬送される物品(10)の位置を認識する物品認識手段とを備え、
前記物品認識手段により得た情報に基づき、前記回転体(20)の回転中に前記アーム(32)を回動させて吸着予定の物品(10)に対向する吸着位置(U)において該物品(10)を吸着具(34)で吸着するに際して、前記上昇位置と前記下降位置との間の中途範囲において吸着予定の物品(10)の斜め上方から前記吸着位置(U)を含む下降位置付近に向けて該吸着具(34)を吸引しながら下降させ、該下降位置付近にて前記中途範囲よりも該吸着具(34)を遅く下降させるように前記モータ(30)を変速制御して、前記物品(10)を吸着する
ことを特徴とする物品搬送装置。
【請求項2】
前記下降位置が前記吸着予定の物品(10)から離れた高い位置に設定されて、前記吸着具(34)は、前記吸着位置(U)で前記物品(10)を浮上させて吸着することを特徴とする請求項1記載の物品搬送装置。
【請求項3】
前記吸着具(34)で吸着した物品(10)を上昇させる際に、該物品(10)の下端がコンベヤ(12)上の隣接する物品(10の上端を越えるまでの高さ範囲においては、前記吸着具(34)を下降させる場合より上昇させるほうが吸着具(34)の移動速度が速くなるよう前記モータを変速制御することを特徴とする請求項1または2記載の物品搬送装置。
【請求項4】
前記回転体(20)の回転方向とは反対方向に前記アーム(32)を回動させて、前記吸着具(34)によって吸着予定の物品(10)が吸着されることを特徴とする請求項1〜3の何れか一項に記載の物品搬送装置。
【請求項1】
上下方向の軸周りを一定方向に回転する回転体(20)と、
該回転体(20)の回転中心(Q)から離れて回転体(20)に対して回動可能に支持され、上下方向の軸周りに夫々独立して回動される複数のアーム(32)と、
各アーム(32)に設けられ、モータ(30)の駆動により上昇位置と下降位置との間で昇降移動される吸着具(34)と、
任意の間隔でコンベヤ(12)上を搬送される物品(10)の位置を認識する物品認識手段とを備え、
前記物品認識手段により得た情報に基づき、前記回転体(20)の回転中に前記アーム(32)を回動させて吸着予定の物品(10)に対向する吸着位置(U)において該物品(10)を吸着具(34)で吸着するに際して、前記上昇位置と前記下降位置との間の中途範囲において吸着予定の物品(10)の斜め上方から前記吸着位置(U)を含む下降位置付近に向けて該吸着具(34)を吸引しながら下降させ、該下降位置付近にて前記中途範囲よりも該吸着具(34)を遅く下降させるように前記モータ(30)を変速制御して、前記物品(10)を吸着する
ことを特徴とする物品搬送装置。
【請求項2】
前記下降位置が前記吸着予定の物品(10)から離れた高い位置に設定されて、前記吸着具(34)は、前記吸着位置(U)で前記物品(10)を浮上させて吸着することを特徴とする請求項1記載の物品搬送装置。
【請求項3】
前記吸着具(34)で吸着した物品(10)を上昇させる際に、該物品(10)の下端がコンベヤ(12)上の隣接する物品(10の上端を越えるまでの高さ範囲においては、前記吸着具(34)を下降させる場合より上昇させるほうが吸着具(34)の移動速度が速くなるよう前記モータを変速制御することを特徴とする請求項1または2記載の物品搬送装置。
【請求項4】
前記回転体(20)の回転方向とは反対方向に前記アーム(32)を回動させて、前記吸着具(34)によって吸着予定の物品(10)が吸着されることを特徴とする請求項1〜3の何れか一項に記載の物品搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−71828(P2013−71828A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−213521(P2011−213521)
【出願日】平成23年9月28日(2011.9.28)
【出願人】(000136387)株式会社フジキカイ (129)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月28日(2011.9.28)
【出願人】(000136387)株式会社フジキカイ (129)
【Fターム(参考)】
[ Back to top ]