
物品整列装置
【課題】 重心に偏りのあるキャップ等の物品を搬送しつつ整列させること。
【解決手段】 重心に偏りのある物品1を搬送しつつ整列させる物品整列装置10であって、複数の固定床20と移動床30、40を物品搬送方向に沿って交互に配置するとともに、各固定床20と各移動床30、40が物品搬送方向の下流側に向けて下り勾配をなすように傾斜した下り勾配床面21、31、41を備え、各移動床30、40を同時にそれらの床面が隣接する固定床20の床面に対する上位と下位に位置付ける昇降動作を繰り返し、少なくとも一部の移動床40が、上記下り勾配床面41に対する物品搬送方向の上流側に、物品搬送方向の下流側に向けて上り勾配をなすように傾斜した上り勾配床面40Aを備えてなるもの。
【解決手段】 重心に偏りのある物品1を搬送しつつ整列させる物品整列装置10であって、複数の固定床20と移動床30、40を物品搬送方向に沿って交互に配置するとともに、各固定床20と各移動床30、40が物品搬送方向の下流側に向けて下り勾配をなすように傾斜した下り勾配床面21、31、41を備え、各移動床30、40を同時にそれらの床面が隣接する固定床20の床面に対する上位と下位に位置付ける昇降動作を繰り返し、少なくとも一部の移動床40が、上記下り勾配床面41に対する物品搬送方向の上流側に、物品搬送方向の下流側に向けて上り勾配をなすように傾斜した上り勾配床面40Aを備えてなるもの。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は物品整列装置に関する。
【背景技術】
【0002】
物品整列装置として、特許文献1〜3に記載のものがある。
特許文献1に記載の物品整列装置は、キャップを整列ワークとする物品整列装置であって、ワーク収容部に鉛直方向に向けて突設された回転軸を中心に回転駆動される円板状のセンターホイールの外周部側に内部側に比べて高さが低い段差部を設けるとともに、前記センターホイールの段上部の外側に前記センターホイールの段上部に載っている前記ワークの移動をガイドする略円弧状のワークガイド部材を配設し、このワークガイド部材の終端部に前記センターホイールとの間の間隔を徐々に大きくする傾斜状のワーク落下ガイド部を設け、前記センターホイールの段上部のワークが前記ワーク落下ガイド部と前記センターホイールとの間の隙間を通り、前記センターホイールの段下部側に落下する際に横向きのワークの姿勢を縦向きに揃えるものである。
【0003】
特許文献2に記載の物品整列装置は、電子部品を整列部品とするボウル振動式の物品整列装置であって、ボウル21の径外方へ向かって下向き傾斜の広幅トラック54とその周壁53に形成した単層・単列化部51に続いて、周壁53に整合する外周側壁63の下端からボウル21の径内方へ向かって下向き傾斜で部品Qの幅より広く、広幅長さより狭い幅の帯状の選別移送路64と、その傾斜の下端に上端面がトラック54と同一傾斜で外周側壁63の下端より高い位置にある内周側壁65とを設けて一次選別部61とし、長さ方向を移送方向に向けた部品Qは選別移送路64によって移送し、幅方向を移送方向に向けた部品Q’は内周側の端部を内周側壁65上に乗せる姿勢として選別する。二次選別部7に続く三次選別部81で外周側壁83の下端より低くした低内周側壁85の上端部から部品Q’をずり落とさせて排除し、部品の移送の向きを選別して整列するものである。
【0004】
特許文献3に記載の物品整列装置は、キャップを整列物品とする物品整列装置であって、複数の固定床の各個の床面を互いに搬送方向の下流側に向けて下り勾配をなすように配置し、複数の移動床の各個を各固定床に対し搬送方向の側傍に隣接配置するとともに、各移動床を同時にそれらの床面が隣接する固定床の床面に対する上位と下位に位置付ける昇降動作を繰り返し、上位に位置付けされた各移動床の床面を互いに搬送方向の下流側に向けて下り勾配をなすように配置し、各固定床の床面を搬送方向の下流側に向けて下り勾配をなすように傾斜させるとともに、各移動床の床面も搬送方向の下流側に向けて下り勾配をなすように傾斜させてなるものである。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002-179004
【特許文献2】特開2001-26317
【特許文献3】特開2008-150143
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の物品整列装置は、円板状のセンターホイールの外周部で、物品を整列させる方法であるが、扱い可能な物品サイズに制約があり(段下部より大きな物品を扱うことは困難で、センターホイールや掻上環板など大規模な型替えが必要)、処理能力に対して装置サイズが大きく、また、物品を高速で動かすため物品にキズが付き易いという問題点がある。
【0007】
特許文献2に記載の物品整列装置は、ボウル振動式の物品整列装置であるが、扱い可能な物品サイズに制約があり(台形溝や移送路より大きな物品を扱うことは困難で、ボウル全体の交換といった大規模な型替えが必要)、たまたま目標向きとなった物品のみを排出するため処理能力に対して装置サイズが大きく、また、物品を振動にて搬送するため、物品にキズが付き易く処理速度も遅いという問題点がある。
【0008】
特許文献3に記載の物品整列装置は、小物品〜大物品の多様なサイズの物品に対応できるが、複数の移動床や固定床にまたがるような大きな物品を搬送したり、物品の重心の側の天面を下向きとするために、移動床や固定床を下り勾配の配置とする必要があり、装置の設置面に制約が生じている。仮に、下り勾配の配置だけでなく水平配置や上り勾配の配置も可能として装置の設置の自由度を高めるため、なおかつ大型物品に対応できるようにするため、移動床や固定床の物品搬送方向に沿う床面長さを大型物品に合せて充分大きくすると、小型物品を扱う際には移動床の床面上の先後に物品が並ぶこととなり、先行物品に及ぶ後続物品の作用力により、移動床の上昇時に、先行物品の重心の側の天面を下向きとするような整列は困難となる。
【0009】
本発明の課題は、重心に偏りのあるキャップ等の物品を搬送しつつ整列させる物品整列装置において、多様な形状の物品であって、しかも小物品〜大物品の多様なサイズの物品に対応でき、複数の固定床と移動床を互いに上り勾配、下り勾配、水平のいずれにも配置でき、占有面積あたりの整列能力(生産性)を高く、物品をキズつけることなく整列することにある。
【課題を解決するための手段】
【0010】
請求項1に係る発明は、重心に偏りのある物品を搬送しつつ整列させる物品整列装置であって、複数の固定床と移動床を物品搬送方向に沿って交互に配置するとともに、各固定床と各移動床が物品搬送方向の下流側に向けて下り勾配をなすように傾斜した下り勾配床面を備え、各移動床を同時にそれらの床面が隣接する固定床の床面に対する上位と下位に位置付ける昇降動作を繰り返し、少なくとも一部の移動床が、上記下り勾配床面に対する物品搬送方向の上流側に、物品搬送方向の下流側に向けて上り勾配をなすように傾斜した上り勾配床面を備えてなるようにしたものである。
【0011】
本明細書における「下流」とは、物品が進行していく方向を示し、高さ方向の下位位置を示すものではない。また、「上流」についても同様に、物品が進行していく方向と逆方向を示すものであり、高さ方向の上位位置を示すものではない。従って、「下流側」という表現においても、高さ方向としては、ある基準に対して下位位置に限定されるものではない。「上流側」についても同様である。
【発明の効果】
【0012】
本発明は、少なくとも一部の移動床が、上記下り勾配床面に対する物品搬送方向の上流側に、物品搬送方向の下流側に向けて上り勾配をなすように傾斜した上り勾配床面を備える。これにより、重心に偏りのあるキャップ等の物品を搬送しつつ整列させる物品整列装置において、多様な形状のしかも小物品〜大物品の多様なサイズの物品に対応でき、複数の固定床と移動床を互いに上り勾配、下り勾配、水平のいずれにも配置でき、占有面積あたりの整列能力(生産性)を高く、物品をキズつけることなく整列することができる。
【図面の簡単な説明】
【0013】
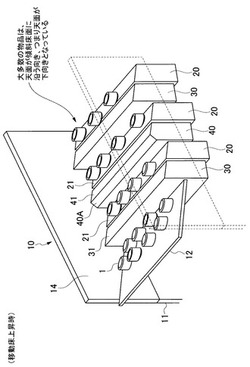
【図1】図1は物品整列装置による大物品整列時における移動床の上昇状態を示す模式図である。
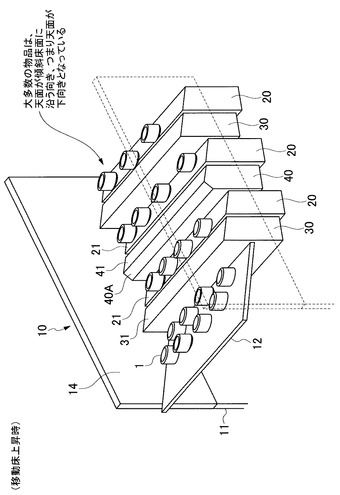
【図2】図2は物品整列装置による大物品整列時における移動床の下降状態を示す模式図である。
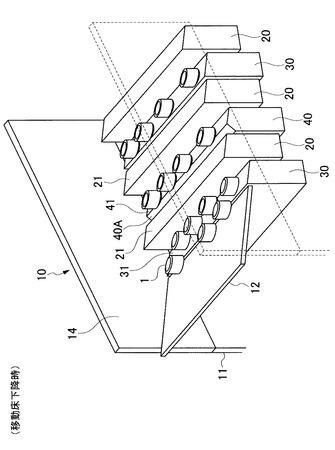
【図3】図3は物品整列装置による小物品整列時における移動床の上昇状態を示す模式図である。
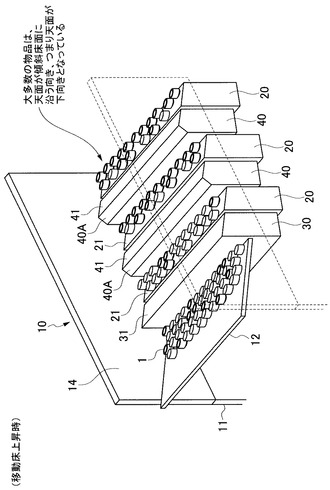
【図4】図4は物品整列装置による小物品整列時における移動床の下降状態を示す模式図である。
【図5】図5は物品整列装置の昇降駆動機構を示す模式図である。
【図6】図6は物品整列装置の固定床と移動床の上り勾配配置を示す模式図である。
【図7】図7は物品整列装置の固定床と移動床の下り勾配配置を示す模式図である。
【図8】図8は物品整列装置の固定床と移動床の水平配置を示す模式図である。
【図9】図9は移動床の上り勾配床面と物品の関係を示す模式図である。
【図10】図10は大物品と小物品の定義を示す模式図である。
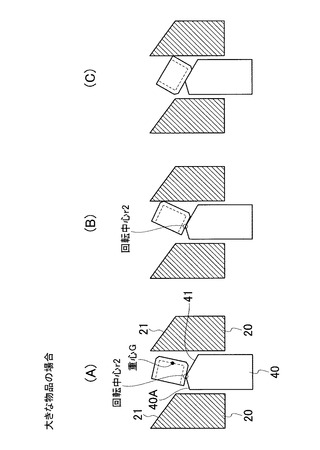
【図11】図11は物品整列装置による大物品の整列処理過程を示す模式図である。
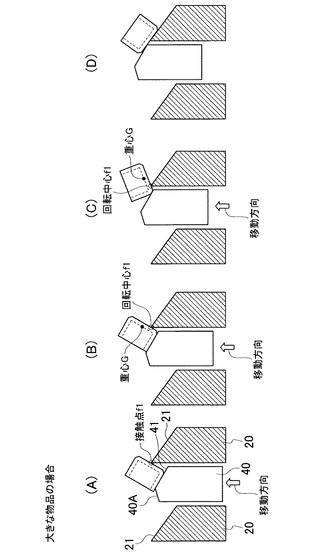
【図12】図12は物品整列装置による大物品の整列処理過程を示す模式図である。
【図13】図13は物品整列装置による大物品の整列処理過程を示す模式図である。
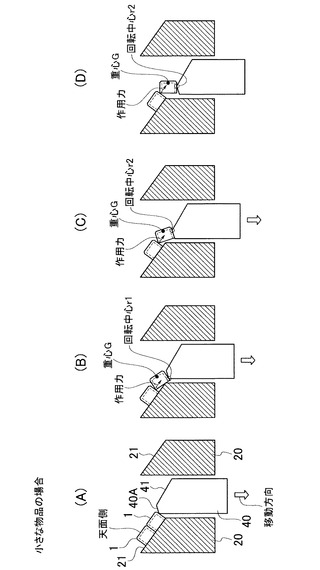
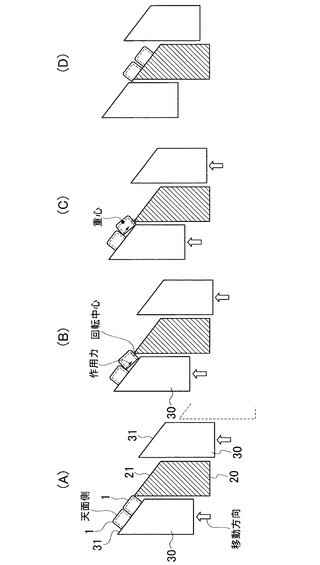
【図14】図14は物品整列装置による小物品の整列処理過程を示す模式図である。
【図15】図15は物品整列装置による小物品の整列処理過程を示す模式図である。
【図16】図16は物品整列装置に排出コンベアを接続した一例を示す模式図である。
【図17】図17は円形キャップを示す模式図である。
【図18】図18は楕円形キャップを示す模式図である。
【図19】図19は四角形キャップを示す模式図である。
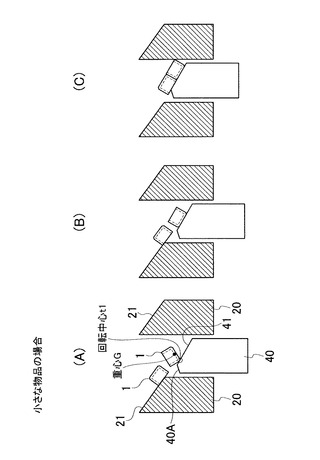
【図20】図20は従来の物品整列装置による小物品の整列処理過程を示す模式図である。
【発明を実施するための形態】
【0014】
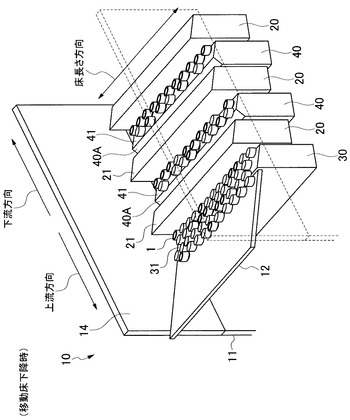
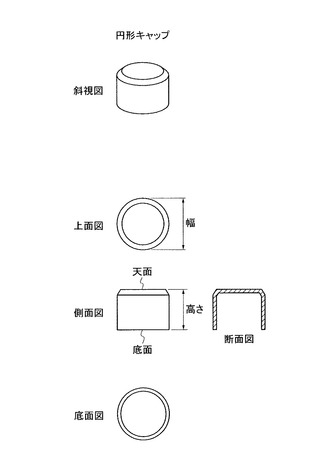
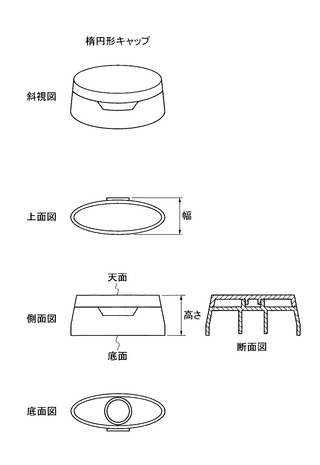
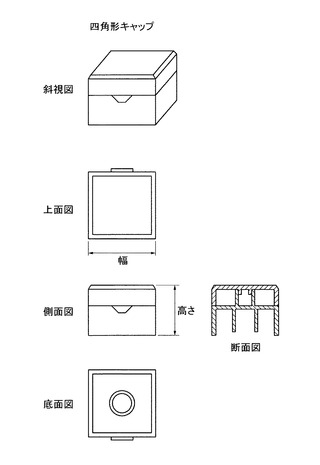
物品整列装置10は、重心に偏りのある物品1を搬送しつつ整列させるものであり、例えばキャップ1を、その重心が位置する側の天面を下向きに整列して送り出し可能にする。図17〜図19は、物品整列装置10が好適に整列処理する各種キャップを示す。図17は円形キャップ、図18は楕円形キャップ、図19は四角形キャップを示す。尚、本発明によって整列処理できる物品1はキャップに限定されない。
【0015】
物品整列装置10は、図1〜図4に示す如く、架台11の一端側から他端側に向かう方向を物品1(本実施例ではキャップとする)の物品搬送方向とし、その一端側に入口シュート12を設け、入口シュート12の裏面に搬送力を高めるため、バイブレータ(不図示)を装備しても良い。入口シュート12への物品1の供給は、物品1を貯めたホッパー下部からでも良いし、ベルトコンベアでも良い。また、入口シュート12がベルトコンベアであっても良い。
【0016】
物品整列装置10は、架台11に設けた支持部材に複数の固定床20を支持する。また、物品整列装置10は、架台11に支持した昇降駆動装置13(図5)に、複数の通常移動床30と面取移動床40を担持する。物品整列装置10は、複数の通常移動床30と面取移動床40の各個を各固定床20に対して搬送方向の側傍(本実施例では上流側の側傍)に隣接配置する。固定床20と移動床30、40は一定の間隔を介して搬送方向に沿って交互に配置されるものになる。尚、固定床20と移動床30、40を床長さ方向の両側から挟む架台11の両側には側板14が備え付けられ、物品1の落下を防止している(図1〜図4では片側のみ表示)。
【0017】
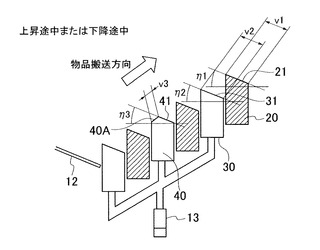
物品整列装置10において、固定床20は、図5に示す如く、それ自体で、搬送方向の下流側に向けて下り勾配(水平に対する傾斜角度η1)をなすように傾斜した下り勾配床面21を備える。各固定床20にバイブレータを装備し、搬送力を高めても良い。また、移動床30、40は、図5に示す如く、それ自体で、搬送方向の下流側に向けて下り勾配(水平に対する傾斜角度η2、η3)をなすように傾斜した下り勾配床面31、41を備える。尚、図5は移動床30、40の昇降動作中で上昇途中の状態、又は下降途中の状態を示している。
【0018】
物品整列装置10は、複数の移動床30、40のうちの少なくも一部、例えば1個又は全部の移動床を、当該移動床が備える下り勾配床面41に対する搬送方向の上流側に、搬送方向の下流側に向けて上り勾配(水平に対する傾斜角度γ)をなすように傾斜した上り勾配床面40Aを備えた面取移動床40とする。
【0019】
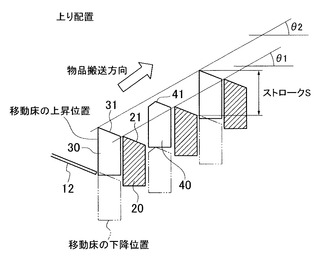
物品整列装置10は、図6に示す如く、複数の固定床20の各個の下り勾配床面21を互いに搬送方向の下流側に向けて上り勾配(水平に対する配置角度θ1)をなすように配置するとともに、複数の移動床30、40の各個の下り勾配床面31、41を互いに搬送方向の下流側に向けて上り勾配(水平に対する配置角度θ2)をなすように配置している。
【0020】
物品整列装置10は、昇降駆動装置13により各移動床30、40の昇降動作を繰り返す。即ち、各移動床30、40をそれらの下り勾配床面31、41が隣接する各固定床20の下り勾配床面21に対する上位(図1、図3)と下位(図2、図4)に位置付ける昇降動作を繰り返す。昇降駆動装置13は、昇降速度や昇降ストロークを変更制御できる電動シリンダを用いることができる。昇降駆動装置13は、電動モータの回転を直線往復運動に変換する機構、又は空圧シリンダ等でも良い。尚、図6のSは移動床30の昇降ストロークを示す。
【0021】
以下、物品整列装置10の各部の構造について詳述する。
(通常移動床30と面取移動床40の上昇動作)
通常移動床30の床面31の最下部が、その下流の固定床20の床面21の最上部を越えるところまで上昇する。
【0022】
面取移動床40の床面41の最下部が、その下流の固定床20の床面21の最上部を越えるところまで上昇する。
【0023】
通常移動床30と面取移動床40はこれ以上に上昇しても良いが、処理能力の点からは、整列移動床40の最上昇位置を、整列移動床40の床面41の最下部が、その下流の固定床20の床面21の最上部を越えた位置とするのが好ましい。上昇位置において一時停止すると、通常移動床30から下流の固定床20へと、面取移動床40から下流の固定床20へと物品1が確実に送られる。物品1に応じて、一時停止時間は、無しとすることができる。この場合は搬送速度が向上する。物品1によっては、適切に調整された停止時間を設けることもある。
【0024】
(通常移動床30と面取移動床40の下降動作)
通常移動床30の床面31の最上部が、その上流の固定床20の床面21の最下部を越えるところまで下降する。
【0025】
面取移動床40の床面41の最上部が、その上流の固定床20の床面21の最下部を越えるところまで下降する。
【0026】
通常移動床30と面取移動床40はこれ以上に下降しても良いが、処理能力の点から、整列移動床40の最下降位置は、整列移動床40の床面41の最上部が、その上流の固定床20の床面21の最下部に達したところとするのが好ましい。最下降位置において一時停止すると、通常移動床30へと上流の固定床20から、面取移動床40へと上流の固定床20から物品1が確実に送られる。物品1の挙動に応じて、一時停止時間は、無しとすることもあれば、適切に調整された停止時間を設けることもある。
【0027】
面取移動床40の下り勾配床面41の最下部を各通常移動床30の下り勾配床面31の最下部を結ぶ直線と概ね一致させると良い。移動床30、40の下り勾配床面31、41の最上部と最下部は、移動床30、40の下り勾配床面31、41上の物品1が下流側の固定床20の下り勾配床面21上へ移動するように、また上流の固定床20の下り勾配床面21上の物品1が下流側の移動床30、40の下り勾配床面31、41上へ移動するように、適宜調整される。
【0028】
物品整列装置10において、固定床20、通常移動床30、面取移動床40の各床面21、31、40A、41の床面幅の好適値は以下の通りである(図5、図9)。尚、物品最小幅wとは物品1を天面の側から見た面の最小寸法をいい、物品高さhとは物品1における天面に直交する縦長方向の全長をいう(図17〜図19)。
【0029】
(固定床20、通常移動床30、面取移動床40の構造)
固定床20、通常移動床30、面取移動床40は、中実部と板状部を組み合せた構造としても良いし、中実構造としても良いし、また、板材の曲げ加工による中空構造とする構造とする等、特に限定されるものではない。材質についても、樹脂、金属、木材、ゴム等、また、これらを組み合せたもの等、特に限定されない。
【0030】
(固定床20、通常移動床30、面取移動床40の床面長さ)
固定床20、通常移動床30、面取移動床40の物品搬送方向に直交する方向に沿う床長さは、物品高さの1.0倍を超えることが望ましい。1.0倍を超えることにより、物品1を上記各床に縦長の物品1を横向きにすることができる。上記各床の床長さを物品高さの2.0倍を超えるようにすることで、物品整列装置10の処理能力を高めることができる。
【0031】
(固定床20の床面21の床面幅v1、通常移動床30の床面31の床面幅v2)
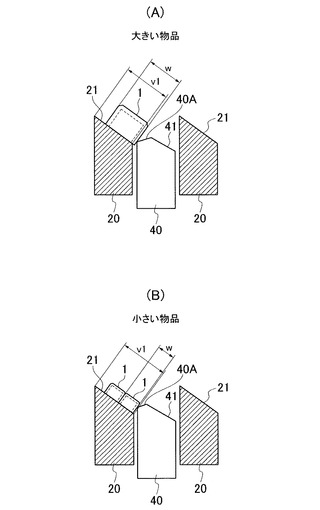
固定床20の床面21の床面幅v1と通常移動床30の床面31の床面幅v2は、物品整列装置10が整列処理する後述する如くの大物品1と小物品1の各物品最小幅wとの関係で定まる。即ち、大物品1との関係で見ると、物品1の物品最小幅wが固定床20の床面21や移動床30の床面31の床面幅v1、v2の0.5〜1.2倍の範囲内にあるものになる。小物品1との関係で見ると、物品1の物品最小幅wが固定床20の床面21や移動床30の床面31の床面幅v1、v2の0.5倍未満のものになる。
【0032】
(面取移動床40の床面40A、41の床面幅)
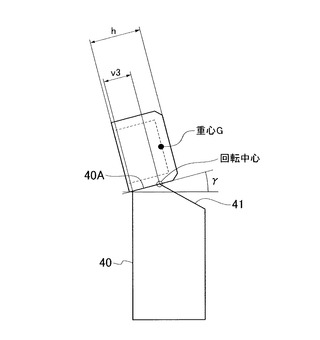
面取移動床40の上り勾配床面40Aの床面幅v3は、図9に示す如く、物品高さの0.3〜0.7倍が好ましい。この範囲とすることで、上流側から搬送されてくる物品1が重心Gを上位にして面取移動床40の上り勾配床面40Aに転がり込んだとき(図11(D)、図12(A)、図14(C)、(D))、物品1の重心Gの位置が該面取移動床40の上り勾配床面40Aと下り勾配床面41の交差頂点より搬送方向の前方(下流側)になるので、物品1はそれらの交差頂点を回転中心として搬送方向の前方に倒れ込む如くに回転し、物品1の重心Gを下位にする整列姿勢を付与されるに至る。
【0033】
物品整列装置10は、複数の移動床30、40のうちの1個を面取移動床40とするものでも良いが、より多くの面取移動床40を備えることによって物品1の上述の整列処理効率を向上し得る。全部の移動床を面取移動床40とするものでも良い。
【0034】
尚、面取移動床40における下り勾配床面41の床面幅は、前述した通常移動床30における下り勾配床面31の床面幅v2から、上述した上り勾配床面40Aの床面幅v3によって移動床30の勾配床面31から欠如されている長さを減算した値になる。
【0035】
物品整列装置10において、固定床20、通常移動床30、面取移動床40の各床面21、31、40A、41の傾斜角度の好適値は以下の通りである(図5)。
【0036】
(固定床20の床面21の傾斜角度η1)
固定床20の床面21が水平面に対してなす傾斜角度η1は、15度から40度が好ましく、特に好ましくは18度から32度である。15度以上とすることで、物品は固定床20の床面21上で下流へとスムースに滑ることが可能である。また、40度以下とすることで通常移動床30、面取移動床40の昇降ストロークを小さくすることが可能であり、物品搬送処理能力を高能力にできる。
【0037】
(通常移動床30の床面31の傾斜角度η2)
通常移動床30の床面31が水平面に対してなす傾斜角度η2も、固定床20の床面21が水平面に対してなす傾斜角度η1におけると同一理由で、15度から40度が好ましく、特に好ましくは18度から32度である。
【0038】
(面取移動床40の床面41の傾斜角度η3)
面取移動床40の床面41が水平面に対してなす傾斜角度η3も、固定床20の床面21が水平面に対してなす傾斜角度η1におけると同一理由で、15度から40度が好ましく、特に好ましくは18度から32度である。
【0039】
(面取移動床40の上り勾配床面40Aの傾斜角度γ)
面取移動床40の上り勾配床面40Aが水平面に対してなす傾斜角度ηは、5度から50度が好ましく、特に好ましくは10度から30度である。この範囲にすることで、物品1が図9の状態から面取移動床40の上り勾配床面40Aと下り勾配床面41の交差頂点を回転中心として前方に倒れ込む如くの回転が容易になる。γが小さすぎると、物品1が上り勾配床面40A上で停止して前方へ倒れ込むようにならず、上り勾配床面40Aを滑ってしまい、図9の状態で回転が停止してしまう。γが大きすぎると、物品1が前方へ倒れ込もうにも、上り勾配床面40Aの傾斜が強すぎて、物品1の重心Gの位置が図9の回転中心よりも下流側になり、図9の状態で回転が停止してしまう。
【0040】
(固定床20と通常移動床30、面取移動床40の傾斜角度η1、η2、η3の関係)
通常移動床30、面取移動床40の床面31、41が水平面となす傾斜角度η2、η3は、固定床20の床面21が水平面となす傾斜角度η1と同等(図5)、又は大きくすることが好ましい。η1よりもη2、η3を好ましくは10〜25度大きくすると良い。角度を大きくすることで、特に、断面形状が円形や正多角形でない楕円状、長円状、長方形状等の長手部を有す形状の物品を扱う際に、通常移動床30、面取移動床40が上昇時、物品1の長手部は通常移動床30、面取移動床40の床面31、41が水平面となす傾斜角度η2、η3に合せて、下流方向により傾斜した状態となり、物品1を確実に下流の固定床20に送り込むことが可能になる。
【0041】
物品整列装置10において、固定床20、通常移動床30、面取移動床40の上り勾配の配置角度の好適値は以下の通りである(図6)。
【0042】
(固定床20の配置角度θ1)
固定床20の配置角度θ1は、水平面に対して、20〜40度とされ、好ましくは24度から36度とされる。20度以上とすることで適切に固定床20や通常移動床30、面取移動床40に載らなかった物品を上流に滑り落とすことが可能になる。逆に40度以下とすることで上下動ストロークを小さくすることができ、高能力で物品の処理が可能になる。
【0043】
(通常移動床30、面取移動床40の配置角度θ2)
通常移動床30、面取移動床40の配置角度θ2も、固定床20の配置角度θ1におけると同一理由で、水平面に対して20〜40度とされ、好ましくは24度から36度とされる。
【0044】
(固定床20と通常移動床30、面取移動床40の配置角度θ1、θ2の関係)
固定床20の配置角度θ1と、通常移動床30、面取移動床40の配置角度θ2は概ね同一とすることが好ましい。この値を概ね同一とすることで、上流と下流の各移動床30、40により物品を下流に送るための昇降ストロークを最小にすることができ、物品搬送処理能力を高能力にできる。
【0045】
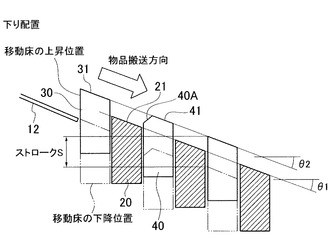
尚、物品整列装置10は、図7に示す如く、複数の固定床20の各個の下り勾配床面21を互いに搬送方向の下流側に向けて下り勾配(水平に対する配置角度θ1)をなすように配置するとともに、複数の移動床30、40の各個の床面31、41を互いに搬送方向の下流側に向けて下り勾配(水平に対する配置角度θ2)をなすように配置しても良い。固定床20の配置角度θ1は、水平面に対して、10〜40度とされ、好ましくは15〜25度とされる。10度以上とすることで適切に固定床20や移動床30、40に載らなかった物品を上流に落とすことが可能になり、更に、上下動ストロークを小さくすることができるので高能力で物品の処理が可能になる。逆に40度以下とすることで、物品の上流方向への移動速度が速くなりすぎることを抑制できる。移動床30、40の配置角度θ2も、固定床20の配置角度θ1におけると同一理由で、水平面に対して10〜40度とされ、好ましくは15〜25度とされる。固定床20の配置角度θ1と、移動床30、40の配置角度θ2は概ね同一とすることが好ましい。この値を概ね同一とすることで、上流と下流の各移動床30、40により物品を下流に送るための昇降ストロークを最小にすることができ、物品搬送処理能力を高能力にできる。複数の固定床20と移動床30、40を下り勾配配置することにより、上り勾配配置(図6)したものに比して、固定床20の床面21と移動床30、40の床面31、41とが同様の下り勾配をなすことから、昇降駆動装置13が移動床30、40に付与すべき昇降ストロークが小さくなり、昇降サイクルタイムを短縮できる。
【0046】
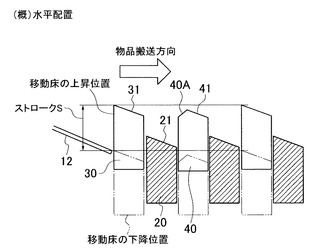
また、物品整列装置10は、図8に示す如く、複数の固定床20の各個の床面21を互いに搬送方向の下流側に向けて水平をなすように配置するとともに、複数の移動床30、40の各個の床面31、41を互いに搬送方向の下流側に向けて水平をなすように配置しても良い。複数の固定床20と移動床30、40を水平配置することにより、上り勾配配置(図6)したものに比して、固定床20の床面21と移動床30、40の床面31、41の配置角度が下り勾配に近くなるから、昇降駆動装置13が移動床30、40に付与すべき昇降ストロークがやや小さくなり、昇降サイクルタイムをやや短縮できる。
【0047】
物品整列装置10によれば、昇降駆動装置13による通常移動床30及び面取移動床40の上昇により、移動床30、40の床面31、40A、41が固定床20の床面21上にある物品1を突き上げると、移動床30、40の床面31、41自体の傾斜が物品1に下流側への搬送力を付与する。搬送力を付与された物品1は、移動床30、40の床面31、41から、下流側の搬送方向に沿って下り勾配をなす固定床20の床面21上に移載され、固定床20の床面21自体の傾斜に載って滑り、下流側へと搬送される。このとき、固定床20の床面21、移動床30、40の床面31、41が互いに下流側へ向けて上り勾配をなすように配置されているとき、物品1はこの上り勾配の搬送経路に沿って順に下流側の床面21、31、40A、41に持ち上げられるように搬送され、最下流の通常移動床30の床面31から出口固定床20を経て排出コンベア等に送り出される。
【0048】
尚、物品整列装置10は、移動床30、40の昇降動作の1サイクル(最下降位置〜最上昇位置〜最下降位置の1サイクル)において、移動床30、40の床面31、40A、41が隣接する固定床20の床面21より上に突出している時間割合を、該固定床20の床面21より下に没入している時間割合より小さく制御することができる。これにより、物品1を移動床30、40の床面31、40A、41より突き上げている時間より、物品1を固定床20の床面21に載せて滑らせる時間のほうが長くなり、物品1の送出量、即ち、物品整列装置10の処理能力を増加できる。
【0049】
尚、移動床30、40の上昇加速度が大きい場合には、移動床30、40の床面31、40A、41が物品1に及ぼす突き上げ力が大きく、ひいては移動床30、40Aの床面31、40A、41の傾斜が物品1に及ぼす搬送力が大きくなり、物品1の排出量を増加できる。
【0050】
また、物品整列装置10は、移動床30、40の昇降動作の1サイクルにおいて、移動床30、40の床面31、40A、41が隣接する固定床20の床面21より上に突出している時間割合を、該固定床20の床面21より下に没入している時間割合より大きく制御することもできる。これにより、物品1を移動床30、40の床面31、40A、41により突き上げている時間より、物品1を固定床20の床面21に載せて滑らせる時間のほうが短くなり、物品1の排送出を低減できる。
【0051】
このように、1サイクルにおける移動床30、40の床面床面時間割合を増減できるよう構成したことで、部品1の送出量を調整することができ、充填ラインなどの下流工程の処理能力に物品整列装置の処理能力を合致させることができる。
【0052】
尚、移動床30、40の上昇加速度が小さい場合には、移動床30、40の床面31、40A、41が物品1に及ぼす突き上げ力が小さく、ひいては移動床30、40の床面31、40A、41の傾斜が物品1に及ぼす搬送力が小さくなり、物品1の送出量を低減できる。
【0053】
また、移動床30、40の上昇速度の最大値は、搬送物品の重さや固定床配置角度θ1や移動床配置角度θ2等によって、物品1を所望の速度で安定搬送できるように適宜調整される。
【0054】
しかるに、物品整列装置10にあっては、下り勾配床面41の上流側に上り勾配床面40Aを備えた面取移動床40を有するものにしたから、入口シュート12の側から供給される物品1を搬送しつつ以下の如くに整列処理できる。このとき、物品1はキャップであり、重心を天面の側に偏らせている。
【0055】
大物品1については、図1、図2に示した物品整列装置10(1個の面取移動床40を有する)を用いて図11〜図13の如くに整列処理し、小物品1については、図3、図4に示した物品整列装置10(2個の面取移動床40を有する)を用いて図14、図15の如くに整列処理する。
【0056】
尚、本発明の実施において、大物品1と小物品1は以下の如くに定義される(図10)。大物品1は、図10(A)に示す如く、物品1の物品最小幅が固定床20の床面21や移動床30の床面31の床面幅v1、v2の0.5〜1.2倍の範囲内にあるものをいう。小物品1は、図10(B)に示す如く、物品1の物品最小幅が固定床20の床面21や移動床30の床面31の床面幅v1、v2の0.5倍未満のものをいう。大物品1は、固定床20の床面21や移動床30の床面31の搬送方向に2個以上の物品1が並ぶことがない(図10(A))。小物品1は、固定床20の床面21や移動床30の床面31の搬送方向に2個以上の物品1が並び得る(図10(B))。
【0057】
(A)大物品1の整列処理動作(図1、図2、図11〜図13)
大物品1は、図1、図2の物品整列装置10により整列処理される。図1、図2の物品整列装置10は、1個の移動床だけが下り勾配床面41とともに上り勾配床面40Aを備える面取移動床40とした。但し、面取移動床40を多数設けるほど物品1の整列処理効率は良くなり、全部の移動床を面取移動床40としても良い。尚、図11〜図13に示した物品整列装置10は、複数の固定床20、移動床30、40を物品搬送方向に沿って水平配置するものにしたが、上り勾配配置(図5、図6)又は下り勾配配置(図7)のものでも良い。
【0058】
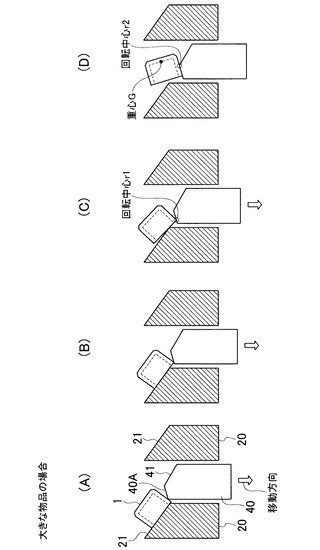
(1)面取移動床40の上流側に位置する固定床20の床面21上に物品1がある(図11(A))。物品1は大きいので、固定床20の床面21上の物品搬送方向に2つ以上の物品1が並ぶことはない。物品1の重心が位置する側の天面は上方を向いている。物品1の目標整列姿勢は、物品1の天面を下向きにすることである。
【0059】
(2)固定床20の床面21上を滑り移動する物品1は、移動床40の下降により、移動床40の上り勾配床面40Aに達する(図11(B))。
【0060】
(3)移動床40が更に下降し、物品1は、移動床40の上り勾配床面40Aとの接触点を回転中心r1とし、移動床40の上り勾配床面40Aに沿うように、前方へ回転して倒れようとする(図11(C))。
【0061】
特にこのとき、即ち移動床40の上流側に位置する固定床20の床面21の斜面の下向き方向延長線が、移動床40の上り勾配床面40Aの傾斜面と交差する位置関係にあるとき、移動床40の下降を一時停止すると、物品1の回転が生じ易い。移動床40の好ましい停止時間は、0.2〜1.5秒である。
【0062】
(4)移動床40は下降端に達して停止するが、物品1は移動床40の上り勾配床面40Aの傾斜面に沿うと、その倒れ込みの回転力により、また更に、重心Gが移動床40の上り勾配床面40Aと下り勾配床面41の交差頂点たる新しい回転中心r2より物品搬送方向の前方に位置することから、続いてその回転中心r2まわりに更に前方へ倒れようとする(図11(D))。
【0063】
(5)物品1は、移動床40の上り勾配床面40Aと下り勾配床面41の交差頂点たる回転中心r2まわりに、前方へ倒れ込むように回転する(図12(A))。
【0064】
(6)物品1は回転し、移動床40の下流の固定床20に衝突する(図12(B))。この物品1の回転が続く場合は(7)へ続く。物品1の回転が固定床20に衝突して完全に停止した場合は(8)へ続く。
【0065】
(7)物品1は前工程からの慣性力で更に回転し、物品1の天面が移動床40の下り勾配床面41にまで接すると回転は停止する(図12(C))。物品1の目標整列姿勢である天面下向きになる。その後、移動床40の上昇により、(11)の如くに、天面を下方とした目標整列姿勢のままで、下流の固定床20の下り勾配床面21上へと移動する。
【0066】
(8)(6)より続く。移動床40の下流の固定床20に衝突して停止した物品1は、移動床40の上昇により、その天面が下流の固定床20の下り勾配床面21の頂点f1に接触し、この接触点f1が物品1の天面に沿う下方へと移動する(図13(A))。
【0067】
(9)移動床40の上昇により、物品1の重心Gが接触点f1よりも搬送方向の前方側になると、物品1は接触点f1を中心とし、前方へと回転を始める(図13(B))。
【0068】
(10)移動床40の更なる上昇により、物品1の重心Gは固定床20との接触点f1よりも一層搬送方向の前方側へと移行する(図13(C))。物品1は、下流の固定床20の頂点f1との接触点を回転中心とし、前方に倒れ込む。
【0069】
(11)物品1の天面が固定床20の下り勾配床面21に接するまで倒れ込むと回転は停止する。物品1の目標整列姿勢である天面下向きになる。
【0070】
(B)小物品1の整列処理動作(図3、図4、図14、図15)
小物品1は、図3、図4の物品整列装置10により整列処理される。図3、図4の物品整列装置10は、2個の移動床が下り勾配床面41とともに上り勾配床面40Aを備える面取移動床40とした。小物品1を整列するときには、上り勾配床面40Aを備える面取移動床40が2個以上存することが好ましい。面取移動床40の上り勾配床面40A上の搬送方向に2個以上の物品1が並んだとき、下流側の物品1にしか回転作用が及ばないため、上流側の物品1にも、下流方向に次配置される面取り移動床40による回転作用を及ぼし易くするためである。全部の移動床を面取移動床40としても良い。尚、図14、図15に示した物品整列装置10は、複数の固定床20、移動床30、40を物品搬送方向に沿って水平配置するものにしたが、上り勾配配置(図5、図6)又は下り勾配配置(図7)のものでも良い。
【0071】
尚、以下の整列処理動作は、固定床20の床面21上の搬送方向に2個以上の物品1が並んでいるものについて説明した。但し、固定床20の床面21上に先行する1個の物品1だけが位置する場合にも、ここで説明するように、同様の整列処理動作がなされる。
【0072】
(1)移動床40の上流側に位置する固定床20の床面21上に2個以上の物品1が搬送方向に並んでいる(図14(A))。物品1の重心が位置する側の天面は上方を向いている。物品1の目標整列姿勢は、物品1の天面を下向きにすることである。
【0073】
(2)移動床40の下降により、先行する物品1は、移動床40の上り勾配床面40Aとの接触点を回転中心r1とし、重心Gが回転中心r1より下流側となり、自重により、移動床40の上り勾配床面40Aに沿うように前方へ回転して倒れ込む(図14(B))。後続の物品1が固定床20の床面21の下り勾配に沿って先行する物品1に及ぼす作用力も、先行する物品1の回転中心r1まわりの回転を助長する方向に作用する。固定床20の床面21上に先行する1個の物品1だけが位置する場合は、自重のみにより前方へ回転して倒れ込む。
【0074】
特にこのとき、即ち移動床40の上流側に位置する固定床20の下り勾配床面21の斜面の下向き方向延長線が、移動床40の上り勾配床面40Aの傾斜面と交差する位置関係にあるとき、移動床40の下降を一時停止すると、物品1の回転が生じ易い。移動床40の好ましい停止時間は、0.2〜1.5秒である。
【0075】
(3)移動床40が更に下降し、先行する物品1は移動床40の上り勾配床面40Aの傾斜面に沿うと、その倒れ込みの回転力により、続いて移動床40の上り勾配床面40Aと下り勾配床面41の交差頂点を回転中心r2とし、更に前方へ倒れようとする(図14(C))。後続の物品1が固定床20の下り勾配床面21の下り勾配に沿って先行の物品1に及ぼす作用力も、先行物品1の回転中心r2まわりの回転を助長する方向に作用する。固定床20の床面21上に先行する1個の物品1だけが位置する場合は、自らの倒れ込みの回転力のみにより、更に前方へ倒れようとする。
【0076】
(4)移動床40は下降端に達して停止するが、先行する物品1は、移動床40の上り勾配床面40Aの頂点r2を回転中心として、前方へ倒れ込む。その倒れ込みの回転力に加え、物品1の重心Gも新しい回転中心r2よりも物品搬送方向の前方にあるものになり、物品1の倒れ込みは進行する(図14(D))。後続の物品1が固定床20の下り勾配床面21の下り勾配に沿って先行の物品1に及ぼす作用力も、先行物品1の回転中心r2まわりの回転を助長する方向に作用する。固定床20の床面21上に先行する1個の物品1だけが位置する場合は、前述の如く、倒れ込みの回転力と物品1の重心Gと回転中心r2の位置関係のみにて、倒れ込みは進行する。
【0077】
(5)先行する物品1の倒れ込みは続き、物品1は移動床40の下り勾配床面41と接触する接触部t1を回転中心として、更に前方へ倒れ込む(図15(A))。物品1の重心Gもこの新しい回転中心t1よりも下流側となり、倒れ込みは進行する。後続の物品1は固定床20の下り勾配床面21を滑り続けるが、その移動速度は、先行する物品1の回転に追いつかず、先行する物品1に作用力を及ぼすことなく、天面を上にしたままで前方へ移動する。
【0078】
(6)先行する物品1の回転はその天面が移動床40の下り勾配床面41に到達して終了し、物品1は天面下向きの目標整列姿勢になる(図15(B))。後続の物品1は、天面を上としたままで固定床20の下り勾配床面21から移動床40の側へ移動する。
【0079】
(7)後続の物品1は、天面を上としたままで移動床40の下り勾配床面41へ完全に移動する(図15(C))。後続の物品1は、このような移動を繰り返すうちに、搬送方向に直交する固定床20、移動床30、40の床面長さ方向(搬送方向と直交する方向)に沿う左右にずれ(図15では紙面の奥行き又は手前方向にずれ)、前述(1)の先行物品1におけると同じ位置に移動する。そしてこの後続物品1も上述した先行物品1と同様の整列処理を付与されて天面下向きの目標整列姿勢になる。
【0080】
尚、ここまで述べた小物品1の整列処理動作において、面取移動床40の上り勾配床面40A上の搬送方向に2個以上の物品1が並んだときの上流側の物品1は、天面が上向きの例で説明したが、天面が下向きであっても同様の整列処理動作となる。当然のことながら、上流側の物品1の天面が下向きの目標整列姿勢の場合、物品1の重心Gが下方に位置して既に安定であるので、この向きが維持されたまま下流へと移動する。
【0081】
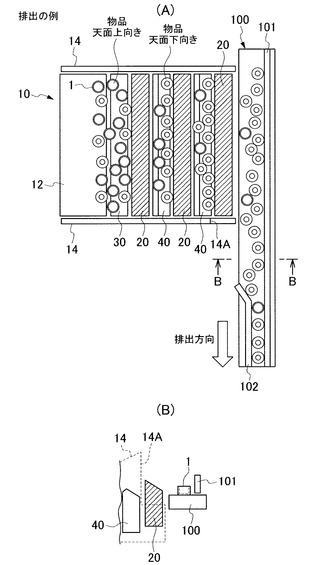
図16は、物品整列装置10の搬送方向の出口(送出口)に排出コンベア100を接続し、物品整列装置10によって整列された物品1を排出コンベア100により下工程へと排出可能にしたものである。
【0082】
排出コンベア100は物品整列装置10から物品1の送り出し方向(搬送方向)と直交する方向を排出方向にしている。排出コンベア100は物品整列装置10の送出口の固定床20の床面21の最下高さ位置よりわずかに低位にコンベア面を位置付けている。物品整列装置10から送り出された物品1は、排出コンベア100まで滑り落ち、排出コンベア100の排出方向に直交する幅方向の奥側に立設してある位置規制ガイド101に当って停止する。排出コンベア100のコンベア面は水平でも、固定床20の床面21の傾斜に合せて傾けていても良い。物品整列装置10の両側の側板14のうち、排出コンベア100の排出方向寄りの側板14は、物品1が詰まることを防止するため、出口側に切欠部14Aを有する。排出コンベア100は連続的に運転されていても、物品整列装置10からの物品1の送り出しタイミングに合せて間欠的に運転されても良い。物品1の幅に対しコンベア100の幅が大きいときは、排出コンベア100の出口側に幅寄せガイド102を設け、排出コンベア100から送出される物品を1列にすることが、後の工程での後処理が容易になって好ましい。
【0083】
物品整列装置10により天面が下向きに整列された良品の物品1のみが、排出コンベア100の送出過程でセンサ等により選別されて、下工程へと送出される。物品1がキャップの場合、排出コンベア100の後の工程で、キャップの上下反転を行ない、このキャップをキャップ締め機へと移送する。
【0084】
尚、図20は本発明の比較例の物品整列装置10であり、複数の固定床20、移動床30を有するが、本発明の面取移動床40を有していない。この比較例の物品整列装置10による、例えば小物品1の整列処理動作は以下の通りになる。
【0085】
(1)移動床30の床面31上に2個以上の物品1が搬送方向に並んでいる(図20(A))。物品1の重心が位置する側の天面は上方を向いている。物品1の目標整列姿勢は、物品1の天面を下向きにすることである。
【0086】
(2)移動床30の上昇により、先行する物品1は下流の固定床20の頂点との接触点を回転中心r0として、前方へ倒れようとするが、後続の物品1からの作用力が、先行物品1の回転中心r0まわりの回転を抑制する方向に作用するため、先行する物品1は回転することができない(図20(B))。
【0087】
(3)移動床30が更に上昇すると、後続の物品1が先行物品1に及ぼす作用力は、前方の物品1の回転中心r0付近を向き、先行する物品1の回転を抑制する力は弱まるものの、この作用力が抵抗となっていることに変わりはなく、先行する物品1は回転することができない(図20(C))。また、この先行物品1の物品の重心Gも回転中心r0よりも上流側となり、この物品1の前方への倒れ込みは困難である。
【0088】
(4)結局、先行する物品1は回転することなく、そのままの姿勢で、下流の固定床20の床面21へと移動し、後続の物品1も下流の固定床20の床面21へと移動する。従って、物品1の目標整列姿勢である天面下向きには整列できない。
【0089】
本実施例によれば以下の作用効果を奏する。
固定床20と移動床30、40の床面21、31、40A、41に載るサイズの物品でありさえすれば、いずれの物品にも上述の整列姿勢を付与できる。従って、重心に偏りのあるキャップ等の物品1を搬送しつつ整列させる物品整列装置10において、多様な形状の物品1であって、しかも小物品〜大物品の多様なサイズの物品1に対応できる。
【0090】
また、少なくとも一部の移動床40が上り勾配床面40Aを備えるものであれば、物品1の前述した整列処理を行なうことができる。従って、複数の固定床20と移動床30、40を互いに上り勾配、下り勾配、水平のいずれにも配置できる。
【0091】
また、複数の固定床20と移動床30、40による物品1の搬送方向全域(入口シュート12〜排出コンベア100)で前述の整列処理がなされ、かつそれらの固定床20、移動床30、40の搬送方向に直交する床面長さの全域で上述の整列処理がなされる。従って、物品整列装置10の占有面積あたりの整列能力(生産性)が高い。
【0092】
また、各固定床20の下り勾配床面21及び移動床30、40の下り勾配床面31、41の勾配と、移動床30、40の昇降動作に応じて物品1をそれらの床面上にて滑らせ、又は転がして搬送しつつ上述の整列処理を行なう。このとき、移動床30、40の昇降動作は、物品1がそれらの床面31、40A、41に当ってキズつくほどの高速とする必要がない。従って、物品1をキズつけることなく整列できる。
【産業上の利用可能性】
【0093】
本発明によれば、重心に偏りのあるキャップ等の物品を搬送しつつ整列させる物品整列装置において、多様な形状の物品であって、しかも小物品〜大物品の多様なサイズの物品に対応でき、複数の固定床と移動床を互いに上り勾配、下り勾配、水平のいずれにも配置でき、占有面積あたりの整列能力(生産性)を高く、物品をキズつけることなく整列できる。
【符号の説明】
【0094】
1 物品
10 物品整列装置
20 固定床
21 下り勾配床面
30 通常移動床
31 下り勾配床面
40 面取移動床
40A 上り勾配床面
41 下り勾配床面
【技術分野】
【0001】
本発明は物品整列装置に関する。
【背景技術】
【0002】
物品整列装置として、特許文献1〜3に記載のものがある。
特許文献1に記載の物品整列装置は、キャップを整列ワークとする物品整列装置であって、ワーク収容部に鉛直方向に向けて突設された回転軸を中心に回転駆動される円板状のセンターホイールの外周部側に内部側に比べて高さが低い段差部を設けるとともに、前記センターホイールの段上部の外側に前記センターホイールの段上部に載っている前記ワークの移動をガイドする略円弧状のワークガイド部材を配設し、このワークガイド部材の終端部に前記センターホイールとの間の間隔を徐々に大きくする傾斜状のワーク落下ガイド部を設け、前記センターホイールの段上部のワークが前記ワーク落下ガイド部と前記センターホイールとの間の隙間を通り、前記センターホイールの段下部側に落下する際に横向きのワークの姿勢を縦向きに揃えるものである。
【0003】
特許文献2に記載の物品整列装置は、電子部品を整列部品とするボウル振動式の物品整列装置であって、ボウル21の径外方へ向かって下向き傾斜の広幅トラック54とその周壁53に形成した単層・単列化部51に続いて、周壁53に整合する外周側壁63の下端からボウル21の径内方へ向かって下向き傾斜で部品Qの幅より広く、広幅長さより狭い幅の帯状の選別移送路64と、その傾斜の下端に上端面がトラック54と同一傾斜で外周側壁63の下端より高い位置にある内周側壁65とを設けて一次選別部61とし、長さ方向を移送方向に向けた部品Qは選別移送路64によって移送し、幅方向を移送方向に向けた部品Q’は内周側の端部を内周側壁65上に乗せる姿勢として選別する。二次選別部7に続く三次選別部81で外周側壁83の下端より低くした低内周側壁85の上端部から部品Q’をずり落とさせて排除し、部品の移送の向きを選別して整列するものである。
【0004】
特許文献3に記載の物品整列装置は、キャップを整列物品とする物品整列装置であって、複数の固定床の各個の床面を互いに搬送方向の下流側に向けて下り勾配をなすように配置し、複数の移動床の各個を各固定床に対し搬送方向の側傍に隣接配置するとともに、各移動床を同時にそれらの床面が隣接する固定床の床面に対する上位と下位に位置付ける昇降動作を繰り返し、上位に位置付けされた各移動床の床面を互いに搬送方向の下流側に向けて下り勾配をなすように配置し、各固定床の床面を搬送方向の下流側に向けて下り勾配をなすように傾斜させるとともに、各移動床の床面も搬送方向の下流側に向けて下り勾配をなすように傾斜させてなるものである。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002-179004
【特許文献2】特開2001-26317
【特許文献3】特開2008-150143
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の物品整列装置は、円板状のセンターホイールの外周部で、物品を整列させる方法であるが、扱い可能な物品サイズに制約があり(段下部より大きな物品を扱うことは困難で、センターホイールや掻上環板など大規模な型替えが必要)、処理能力に対して装置サイズが大きく、また、物品を高速で動かすため物品にキズが付き易いという問題点がある。
【0007】
特許文献2に記載の物品整列装置は、ボウル振動式の物品整列装置であるが、扱い可能な物品サイズに制約があり(台形溝や移送路より大きな物品を扱うことは困難で、ボウル全体の交換といった大規模な型替えが必要)、たまたま目標向きとなった物品のみを排出するため処理能力に対して装置サイズが大きく、また、物品を振動にて搬送するため、物品にキズが付き易く処理速度も遅いという問題点がある。
【0008】
特許文献3に記載の物品整列装置は、小物品〜大物品の多様なサイズの物品に対応できるが、複数の移動床や固定床にまたがるような大きな物品を搬送したり、物品の重心の側の天面を下向きとするために、移動床や固定床を下り勾配の配置とする必要があり、装置の設置面に制約が生じている。仮に、下り勾配の配置だけでなく水平配置や上り勾配の配置も可能として装置の設置の自由度を高めるため、なおかつ大型物品に対応できるようにするため、移動床や固定床の物品搬送方向に沿う床面長さを大型物品に合せて充分大きくすると、小型物品を扱う際には移動床の床面上の先後に物品が並ぶこととなり、先行物品に及ぶ後続物品の作用力により、移動床の上昇時に、先行物品の重心の側の天面を下向きとするような整列は困難となる。
【0009】
本発明の課題は、重心に偏りのあるキャップ等の物品を搬送しつつ整列させる物品整列装置において、多様な形状の物品であって、しかも小物品〜大物品の多様なサイズの物品に対応でき、複数の固定床と移動床を互いに上り勾配、下り勾配、水平のいずれにも配置でき、占有面積あたりの整列能力(生産性)を高く、物品をキズつけることなく整列することにある。
【課題を解決するための手段】
【0010】
請求項1に係る発明は、重心に偏りのある物品を搬送しつつ整列させる物品整列装置であって、複数の固定床と移動床を物品搬送方向に沿って交互に配置するとともに、各固定床と各移動床が物品搬送方向の下流側に向けて下り勾配をなすように傾斜した下り勾配床面を備え、各移動床を同時にそれらの床面が隣接する固定床の床面に対する上位と下位に位置付ける昇降動作を繰り返し、少なくとも一部の移動床が、上記下り勾配床面に対する物品搬送方向の上流側に、物品搬送方向の下流側に向けて上り勾配をなすように傾斜した上り勾配床面を備えてなるようにしたものである。
【0011】
本明細書における「下流」とは、物品が進行していく方向を示し、高さ方向の下位位置を示すものではない。また、「上流」についても同様に、物品が進行していく方向と逆方向を示すものであり、高さ方向の上位位置を示すものではない。従って、「下流側」という表現においても、高さ方向としては、ある基準に対して下位位置に限定されるものではない。「上流側」についても同様である。
【発明の効果】
【0012】
本発明は、少なくとも一部の移動床が、上記下り勾配床面に対する物品搬送方向の上流側に、物品搬送方向の下流側に向けて上り勾配をなすように傾斜した上り勾配床面を備える。これにより、重心に偏りのあるキャップ等の物品を搬送しつつ整列させる物品整列装置において、多様な形状のしかも小物品〜大物品の多様なサイズの物品に対応でき、複数の固定床と移動床を互いに上り勾配、下り勾配、水平のいずれにも配置でき、占有面積あたりの整列能力(生産性)を高く、物品をキズつけることなく整列することができる。
【図面の簡単な説明】
【0013】
【図1】図1は物品整列装置による大物品整列時における移動床の上昇状態を示す模式図である。
【図2】図2は物品整列装置による大物品整列時における移動床の下降状態を示す模式図である。
【図3】図3は物品整列装置による小物品整列時における移動床の上昇状態を示す模式図である。
【図4】図4は物品整列装置による小物品整列時における移動床の下降状態を示す模式図である。
【図5】図5は物品整列装置の昇降駆動機構を示す模式図である。
【図6】図6は物品整列装置の固定床と移動床の上り勾配配置を示す模式図である。
【図7】図7は物品整列装置の固定床と移動床の下り勾配配置を示す模式図である。
【図8】図8は物品整列装置の固定床と移動床の水平配置を示す模式図である。
【図9】図9は移動床の上り勾配床面と物品の関係を示す模式図である。
【図10】図10は大物品と小物品の定義を示す模式図である。
【図11】図11は物品整列装置による大物品の整列処理過程を示す模式図である。
【図12】図12は物品整列装置による大物品の整列処理過程を示す模式図である。
【図13】図13は物品整列装置による大物品の整列処理過程を示す模式図である。
【図14】図14は物品整列装置による小物品の整列処理過程を示す模式図である。
【図15】図15は物品整列装置による小物品の整列処理過程を示す模式図である。
【図16】図16は物品整列装置に排出コンベアを接続した一例を示す模式図である。
【図17】図17は円形キャップを示す模式図である。
【図18】図18は楕円形キャップを示す模式図である。
【図19】図19は四角形キャップを示す模式図である。
【図20】図20は従来の物品整列装置による小物品の整列処理過程を示す模式図である。
【発明を実施するための形態】
【0014】
物品整列装置10は、重心に偏りのある物品1を搬送しつつ整列させるものであり、例えばキャップ1を、その重心が位置する側の天面を下向きに整列して送り出し可能にする。図17〜図19は、物品整列装置10が好適に整列処理する各種キャップを示す。図17は円形キャップ、図18は楕円形キャップ、図19は四角形キャップを示す。尚、本発明によって整列処理できる物品1はキャップに限定されない。
【0015】
物品整列装置10は、図1〜図4に示す如く、架台11の一端側から他端側に向かう方向を物品1(本実施例ではキャップとする)の物品搬送方向とし、その一端側に入口シュート12を設け、入口シュート12の裏面に搬送力を高めるため、バイブレータ(不図示)を装備しても良い。入口シュート12への物品1の供給は、物品1を貯めたホッパー下部からでも良いし、ベルトコンベアでも良い。また、入口シュート12がベルトコンベアであっても良い。
【0016】
物品整列装置10は、架台11に設けた支持部材に複数の固定床20を支持する。また、物品整列装置10は、架台11に支持した昇降駆動装置13(図5)に、複数の通常移動床30と面取移動床40を担持する。物品整列装置10は、複数の通常移動床30と面取移動床40の各個を各固定床20に対して搬送方向の側傍(本実施例では上流側の側傍)に隣接配置する。固定床20と移動床30、40は一定の間隔を介して搬送方向に沿って交互に配置されるものになる。尚、固定床20と移動床30、40を床長さ方向の両側から挟む架台11の両側には側板14が備え付けられ、物品1の落下を防止している(図1〜図4では片側のみ表示)。
【0017】
物品整列装置10において、固定床20は、図5に示す如く、それ自体で、搬送方向の下流側に向けて下り勾配(水平に対する傾斜角度η1)をなすように傾斜した下り勾配床面21を備える。各固定床20にバイブレータを装備し、搬送力を高めても良い。また、移動床30、40は、図5に示す如く、それ自体で、搬送方向の下流側に向けて下り勾配(水平に対する傾斜角度η2、η3)をなすように傾斜した下り勾配床面31、41を備える。尚、図5は移動床30、40の昇降動作中で上昇途中の状態、又は下降途中の状態を示している。
【0018】
物品整列装置10は、複数の移動床30、40のうちの少なくも一部、例えば1個又は全部の移動床を、当該移動床が備える下り勾配床面41に対する搬送方向の上流側に、搬送方向の下流側に向けて上り勾配(水平に対する傾斜角度γ)をなすように傾斜した上り勾配床面40Aを備えた面取移動床40とする。
【0019】
物品整列装置10は、図6に示す如く、複数の固定床20の各個の下り勾配床面21を互いに搬送方向の下流側に向けて上り勾配(水平に対する配置角度θ1)をなすように配置するとともに、複数の移動床30、40の各個の下り勾配床面31、41を互いに搬送方向の下流側に向けて上り勾配(水平に対する配置角度θ2)をなすように配置している。
【0020】
物品整列装置10は、昇降駆動装置13により各移動床30、40の昇降動作を繰り返す。即ち、各移動床30、40をそれらの下り勾配床面31、41が隣接する各固定床20の下り勾配床面21に対する上位(図1、図3)と下位(図2、図4)に位置付ける昇降動作を繰り返す。昇降駆動装置13は、昇降速度や昇降ストロークを変更制御できる電動シリンダを用いることができる。昇降駆動装置13は、電動モータの回転を直線往復運動に変換する機構、又は空圧シリンダ等でも良い。尚、図6のSは移動床30の昇降ストロークを示す。
【0021】
以下、物品整列装置10の各部の構造について詳述する。
(通常移動床30と面取移動床40の上昇動作)
通常移動床30の床面31の最下部が、その下流の固定床20の床面21の最上部を越えるところまで上昇する。
【0022】
面取移動床40の床面41の最下部が、その下流の固定床20の床面21の最上部を越えるところまで上昇する。
【0023】
通常移動床30と面取移動床40はこれ以上に上昇しても良いが、処理能力の点からは、整列移動床40の最上昇位置を、整列移動床40の床面41の最下部が、その下流の固定床20の床面21の最上部を越えた位置とするのが好ましい。上昇位置において一時停止すると、通常移動床30から下流の固定床20へと、面取移動床40から下流の固定床20へと物品1が確実に送られる。物品1に応じて、一時停止時間は、無しとすることができる。この場合は搬送速度が向上する。物品1によっては、適切に調整された停止時間を設けることもある。
【0024】
(通常移動床30と面取移動床40の下降動作)
通常移動床30の床面31の最上部が、その上流の固定床20の床面21の最下部を越えるところまで下降する。
【0025】
面取移動床40の床面41の最上部が、その上流の固定床20の床面21の最下部を越えるところまで下降する。
【0026】
通常移動床30と面取移動床40はこれ以上に下降しても良いが、処理能力の点から、整列移動床40の最下降位置は、整列移動床40の床面41の最上部が、その上流の固定床20の床面21の最下部に達したところとするのが好ましい。最下降位置において一時停止すると、通常移動床30へと上流の固定床20から、面取移動床40へと上流の固定床20から物品1が確実に送られる。物品1の挙動に応じて、一時停止時間は、無しとすることもあれば、適切に調整された停止時間を設けることもある。
【0027】
面取移動床40の下り勾配床面41の最下部を各通常移動床30の下り勾配床面31の最下部を結ぶ直線と概ね一致させると良い。移動床30、40の下り勾配床面31、41の最上部と最下部は、移動床30、40の下り勾配床面31、41上の物品1が下流側の固定床20の下り勾配床面21上へ移動するように、また上流の固定床20の下り勾配床面21上の物品1が下流側の移動床30、40の下り勾配床面31、41上へ移動するように、適宜調整される。
【0028】
物品整列装置10において、固定床20、通常移動床30、面取移動床40の各床面21、31、40A、41の床面幅の好適値は以下の通りである(図5、図9)。尚、物品最小幅wとは物品1を天面の側から見た面の最小寸法をいい、物品高さhとは物品1における天面に直交する縦長方向の全長をいう(図17〜図19)。
【0029】
(固定床20、通常移動床30、面取移動床40の構造)
固定床20、通常移動床30、面取移動床40は、中実部と板状部を組み合せた構造としても良いし、中実構造としても良いし、また、板材の曲げ加工による中空構造とする構造とする等、特に限定されるものではない。材質についても、樹脂、金属、木材、ゴム等、また、これらを組み合せたもの等、特に限定されない。
【0030】
(固定床20、通常移動床30、面取移動床40の床面長さ)
固定床20、通常移動床30、面取移動床40の物品搬送方向に直交する方向に沿う床長さは、物品高さの1.0倍を超えることが望ましい。1.0倍を超えることにより、物品1を上記各床に縦長の物品1を横向きにすることができる。上記各床の床長さを物品高さの2.0倍を超えるようにすることで、物品整列装置10の処理能力を高めることができる。
【0031】
(固定床20の床面21の床面幅v1、通常移動床30の床面31の床面幅v2)
固定床20の床面21の床面幅v1と通常移動床30の床面31の床面幅v2は、物品整列装置10が整列処理する後述する如くの大物品1と小物品1の各物品最小幅wとの関係で定まる。即ち、大物品1との関係で見ると、物品1の物品最小幅wが固定床20の床面21や移動床30の床面31の床面幅v1、v2の0.5〜1.2倍の範囲内にあるものになる。小物品1との関係で見ると、物品1の物品最小幅wが固定床20の床面21や移動床30の床面31の床面幅v1、v2の0.5倍未満のものになる。
【0032】
(面取移動床40の床面40A、41の床面幅)
面取移動床40の上り勾配床面40Aの床面幅v3は、図9に示す如く、物品高さの0.3〜0.7倍が好ましい。この範囲とすることで、上流側から搬送されてくる物品1が重心Gを上位にして面取移動床40の上り勾配床面40Aに転がり込んだとき(図11(D)、図12(A)、図14(C)、(D))、物品1の重心Gの位置が該面取移動床40の上り勾配床面40Aと下り勾配床面41の交差頂点より搬送方向の前方(下流側)になるので、物品1はそれらの交差頂点を回転中心として搬送方向の前方に倒れ込む如くに回転し、物品1の重心Gを下位にする整列姿勢を付与されるに至る。
【0033】
物品整列装置10は、複数の移動床30、40のうちの1個を面取移動床40とするものでも良いが、より多くの面取移動床40を備えることによって物品1の上述の整列処理効率を向上し得る。全部の移動床を面取移動床40とするものでも良い。
【0034】
尚、面取移動床40における下り勾配床面41の床面幅は、前述した通常移動床30における下り勾配床面31の床面幅v2から、上述した上り勾配床面40Aの床面幅v3によって移動床30の勾配床面31から欠如されている長さを減算した値になる。
【0035】
物品整列装置10において、固定床20、通常移動床30、面取移動床40の各床面21、31、40A、41の傾斜角度の好適値は以下の通りである(図5)。
【0036】
(固定床20の床面21の傾斜角度η1)
固定床20の床面21が水平面に対してなす傾斜角度η1は、15度から40度が好ましく、特に好ましくは18度から32度である。15度以上とすることで、物品は固定床20の床面21上で下流へとスムースに滑ることが可能である。また、40度以下とすることで通常移動床30、面取移動床40の昇降ストロークを小さくすることが可能であり、物品搬送処理能力を高能力にできる。
【0037】
(通常移動床30の床面31の傾斜角度η2)
通常移動床30の床面31が水平面に対してなす傾斜角度η2も、固定床20の床面21が水平面に対してなす傾斜角度η1におけると同一理由で、15度から40度が好ましく、特に好ましくは18度から32度である。
【0038】
(面取移動床40の床面41の傾斜角度η3)
面取移動床40の床面41が水平面に対してなす傾斜角度η3も、固定床20の床面21が水平面に対してなす傾斜角度η1におけると同一理由で、15度から40度が好ましく、特に好ましくは18度から32度である。
【0039】
(面取移動床40の上り勾配床面40Aの傾斜角度γ)
面取移動床40の上り勾配床面40Aが水平面に対してなす傾斜角度ηは、5度から50度が好ましく、特に好ましくは10度から30度である。この範囲にすることで、物品1が図9の状態から面取移動床40の上り勾配床面40Aと下り勾配床面41の交差頂点を回転中心として前方に倒れ込む如くの回転が容易になる。γが小さすぎると、物品1が上り勾配床面40A上で停止して前方へ倒れ込むようにならず、上り勾配床面40Aを滑ってしまい、図9の状態で回転が停止してしまう。γが大きすぎると、物品1が前方へ倒れ込もうにも、上り勾配床面40Aの傾斜が強すぎて、物品1の重心Gの位置が図9の回転中心よりも下流側になり、図9の状態で回転が停止してしまう。
【0040】
(固定床20と通常移動床30、面取移動床40の傾斜角度η1、η2、η3の関係)
通常移動床30、面取移動床40の床面31、41が水平面となす傾斜角度η2、η3は、固定床20の床面21が水平面となす傾斜角度η1と同等(図5)、又は大きくすることが好ましい。η1よりもη2、η3を好ましくは10〜25度大きくすると良い。角度を大きくすることで、特に、断面形状が円形や正多角形でない楕円状、長円状、長方形状等の長手部を有す形状の物品を扱う際に、通常移動床30、面取移動床40が上昇時、物品1の長手部は通常移動床30、面取移動床40の床面31、41が水平面となす傾斜角度η2、η3に合せて、下流方向により傾斜した状態となり、物品1を確実に下流の固定床20に送り込むことが可能になる。
【0041】
物品整列装置10において、固定床20、通常移動床30、面取移動床40の上り勾配の配置角度の好適値は以下の通りである(図6)。
【0042】
(固定床20の配置角度θ1)
固定床20の配置角度θ1は、水平面に対して、20〜40度とされ、好ましくは24度から36度とされる。20度以上とすることで適切に固定床20や通常移動床30、面取移動床40に載らなかった物品を上流に滑り落とすことが可能になる。逆に40度以下とすることで上下動ストロークを小さくすることができ、高能力で物品の処理が可能になる。
【0043】
(通常移動床30、面取移動床40の配置角度θ2)
通常移動床30、面取移動床40の配置角度θ2も、固定床20の配置角度θ1におけると同一理由で、水平面に対して20〜40度とされ、好ましくは24度から36度とされる。
【0044】
(固定床20と通常移動床30、面取移動床40の配置角度θ1、θ2の関係)
固定床20の配置角度θ1と、通常移動床30、面取移動床40の配置角度θ2は概ね同一とすることが好ましい。この値を概ね同一とすることで、上流と下流の各移動床30、40により物品を下流に送るための昇降ストロークを最小にすることができ、物品搬送処理能力を高能力にできる。
【0045】
尚、物品整列装置10は、図7に示す如く、複数の固定床20の各個の下り勾配床面21を互いに搬送方向の下流側に向けて下り勾配(水平に対する配置角度θ1)をなすように配置するとともに、複数の移動床30、40の各個の床面31、41を互いに搬送方向の下流側に向けて下り勾配(水平に対する配置角度θ2)をなすように配置しても良い。固定床20の配置角度θ1は、水平面に対して、10〜40度とされ、好ましくは15〜25度とされる。10度以上とすることで適切に固定床20や移動床30、40に載らなかった物品を上流に落とすことが可能になり、更に、上下動ストロークを小さくすることができるので高能力で物品の処理が可能になる。逆に40度以下とすることで、物品の上流方向への移動速度が速くなりすぎることを抑制できる。移動床30、40の配置角度θ2も、固定床20の配置角度θ1におけると同一理由で、水平面に対して10〜40度とされ、好ましくは15〜25度とされる。固定床20の配置角度θ1と、移動床30、40の配置角度θ2は概ね同一とすることが好ましい。この値を概ね同一とすることで、上流と下流の各移動床30、40により物品を下流に送るための昇降ストロークを最小にすることができ、物品搬送処理能力を高能力にできる。複数の固定床20と移動床30、40を下り勾配配置することにより、上り勾配配置(図6)したものに比して、固定床20の床面21と移動床30、40の床面31、41とが同様の下り勾配をなすことから、昇降駆動装置13が移動床30、40に付与すべき昇降ストロークが小さくなり、昇降サイクルタイムを短縮できる。
【0046】
また、物品整列装置10は、図8に示す如く、複数の固定床20の各個の床面21を互いに搬送方向の下流側に向けて水平をなすように配置するとともに、複数の移動床30、40の各個の床面31、41を互いに搬送方向の下流側に向けて水平をなすように配置しても良い。複数の固定床20と移動床30、40を水平配置することにより、上り勾配配置(図6)したものに比して、固定床20の床面21と移動床30、40の床面31、41の配置角度が下り勾配に近くなるから、昇降駆動装置13が移動床30、40に付与すべき昇降ストロークがやや小さくなり、昇降サイクルタイムをやや短縮できる。
【0047】
物品整列装置10によれば、昇降駆動装置13による通常移動床30及び面取移動床40の上昇により、移動床30、40の床面31、40A、41が固定床20の床面21上にある物品1を突き上げると、移動床30、40の床面31、41自体の傾斜が物品1に下流側への搬送力を付与する。搬送力を付与された物品1は、移動床30、40の床面31、41から、下流側の搬送方向に沿って下り勾配をなす固定床20の床面21上に移載され、固定床20の床面21自体の傾斜に載って滑り、下流側へと搬送される。このとき、固定床20の床面21、移動床30、40の床面31、41が互いに下流側へ向けて上り勾配をなすように配置されているとき、物品1はこの上り勾配の搬送経路に沿って順に下流側の床面21、31、40A、41に持ち上げられるように搬送され、最下流の通常移動床30の床面31から出口固定床20を経て排出コンベア等に送り出される。
【0048】
尚、物品整列装置10は、移動床30、40の昇降動作の1サイクル(最下降位置〜最上昇位置〜最下降位置の1サイクル)において、移動床30、40の床面31、40A、41が隣接する固定床20の床面21より上に突出している時間割合を、該固定床20の床面21より下に没入している時間割合より小さく制御することができる。これにより、物品1を移動床30、40の床面31、40A、41より突き上げている時間より、物品1を固定床20の床面21に載せて滑らせる時間のほうが長くなり、物品1の送出量、即ち、物品整列装置10の処理能力を増加できる。
【0049】
尚、移動床30、40の上昇加速度が大きい場合には、移動床30、40の床面31、40A、41が物品1に及ぼす突き上げ力が大きく、ひいては移動床30、40Aの床面31、40A、41の傾斜が物品1に及ぼす搬送力が大きくなり、物品1の排出量を増加できる。
【0050】
また、物品整列装置10は、移動床30、40の昇降動作の1サイクルにおいて、移動床30、40の床面31、40A、41が隣接する固定床20の床面21より上に突出している時間割合を、該固定床20の床面21より下に没入している時間割合より大きく制御することもできる。これにより、物品1を移動床30、40の床面31、40A、41により突き上げている時間より、物品1を固定床20の床面21に載せて滑らせる時間のほうが短くなり、物品1の排送出を低減できる。
【0051】
このように、1サイクルにおける移動床30、40の床面床面時間割合を増減できるよう構成したことで、部品1の送出量を調整することができ、充填ラインなどの下流工程の処理能力に物品整列装置の処理能力を合致させることができる。
【0052】
尚、移動床30、40の上昇加速度が小さい場合には、移動床30、40の床面31、40A、41が物品1に及ぼす突き上げ力が小さく、ひいては移動床30、40の床面31、40A、41の傾斜が物品1に及ぼす搬送力が小さくなり、物品1の送出量を低減できる。
【0053】
また、移動床30、40の上昇速度の最大値は、搬送物品の重さや固定床配置角度θ1や移動床配置角度θ2等によって、物品1を所望の速度で安定搬送できるように適宜調整される。
【0054】
しかるに、物品整列装置10にあっては、下り勾配床面41の上流側に上り勾配床面40Aを備えた面取移動床40を有するものにしたから、入口シュート12の側から供給される物品1を搬送しつつ以下の如くに整列処理できる。このとき、物品1はキャップであり、重心を天面の側に偏らせている。
【0055】
大物品1については、図1、図2に示した物品整列装置10(1個の面取移動床40を有する)を用いて図11〜図13の如くに整列処理し、小物品1については、図3、図4に示した物品整列装置10(2個の面取移動床40を有する)を用いて図14、図15の如くに整列処理する。
【0056】
尚、本発明の実施において、大物品1と小物品1は以下の如くに定義される(図10)。大物品1は、図10(A)に示す如く、物品1の物品最小幅が固定床20の床面21や移動床30の床面31の床面幅v1、v2の0.5〜1.2倍の範囲内にあるものをいう。小物品1は、図10(B)に示す如く、物品1の物品最小幅が固定床20の床面21や移動床30の床面31の床面幅v1、v2の0.5倍未満のものをいう。大物品1は、固定床20の床面21や移動床30の床面31の搬送方向に2個以上の物品1が並ぶことがない(図10(A))。小物品1は、固定床20の床面21や移動床30の床面31の搬送方向に2個以上の物品1が並び得る(図10(B))。
【0057】
(A)大物品1の整列処理動作(図1、図2、図11〜図13)
大物品1は、図1、図2の物品整列装置10により整列処理される。図1、図2の物品整列装置10は、1個の移動床だけが下り勾配床面41とともに上り勾配床面40Aを備える面取移動床40とした。但し、面取移動床40を多数設けるほど物品1の整列処理効率は良くなり、全部の移動床を面取移動床40としても良い。尚、図11〜図13に示した物品整列装置10は、複数の固定床20、移動床30、40を物品搬送方向に沿って水平配置するものにしたが、上り勾配配置(図5、図6)又は下り勾配配置(図7)のものでも良い。
【0058】
(1)面取移動床40の上流側に位置する固定床20の床面21上に物品1がある(図11(A))。物品1は大きいので、固定床20の床面21上の物品搬送方向に2つ以上の物品1が並ぶことはない。物品1の重心が位置する側の天面は上方を向いている。物品1の目標整列姿勢は、物品1の天面を下向きにすることである。
【0059】
(2)固定床20の床面21上を滑り移動する物品1は、移動床40の下降により、移動床40の上り勾配床面40Aに達する(図11(B))。
【0060】
(3)移動床40が更に下降し、物品1は、移動床40の上り勾配床面40Aとの接触点を回転中心r1とし、移動床40の上り勾配床面40Aに沿うように、前方へ回転して倒れようとする(図11(C))。
【0061】
特にこのとき、即ち移動床40の上流側に位置する固定床20の床面21の斜面の下向き方向延長線が、移動床40の上り勾配床面40Aの傾斜面と交差する位置関係にあるとき、移動床40の下降を一時停止すると、物品1の回転が生じ易い。移動床40の好ましい停止時間は、0.2〜1.5秒である。
【0062】
(4)移動床40は下降端に達して停止するが、物品1は移動床40の上り勾配床面40Aの傾斜面に沿うと、その倒れ込みの回転力により、また更に、重心Gが移動床40の上り勾配床面40Aと下り勾配床面41の交差頂点たる新しい回転中心r2より物品搬送方向の前方に位置することから、続いてその回転中心r2まわりに更に前方へ倒れようとする(図11(D))。
【0063】
(5)物品1は、移動床40の上り勾配床面40Aと下り勾配床面41の交差頂点たる回転中心r2まわりに、前方へ倒れ込むように回転する(図12(A))。
【0064】
(6)物品1は回転し、移動床40の下流の固定床20に衝突する(図12(B))。この物品1の回転が続く場合は(7)へ続く。物品1の回転が固定床20に衝突して完全に停止した場合は(8)へ続く。
【0065】
(7)物品1は前工程からの慣性力で更に回転し、物品1の天面が移動床40の下り勾配床面41にまで接すると回転は停止する(図12(C))。物品1の目標整列姿勢である天面下向きになる。その後、移動床40の上昇により、(11)の如くに、天面を下方とした目標整列姿勢のままで、下流の固定床20の下り勾配床面21上へと移動する。
【0066】
(8)(6)より続く。移動床40の下流の固定床20に衝突して停止した物品1は、移動床40の上昇により、その天面が下流の固定床20の下り勾配床面21の頂点f1に接触し、この接触点f1が物品1の天面に沿う下方へと移動する(図13(A))。
【0067】
(9)移動床40の上昇により、物品1の重心Gが接触点f1よりも搬送方向の前方側になると、物品1は接触点f1を中心とし、前方へと回転を始める(図13(B))。
【0068】
(10)移動床40の更なる上昇により、物品1の重心Gは固定床20との接触点f1よりも一層搬送方向の前方側へと移行する(図13(C))。物品1は、下流の固定床20の頂点f1との接触点を回転中心とし、前方に倒れ込む。
【0069】
(11)物品1の天面が固定床20の下り勾配床面21に接するまで倒れ込むと回転は停止する。物品1の目標整列姿勢である天面下向きになる。
【0070】
(B)小物品1の整列処理動作(図3、図4、図14、図15)
小物品1は、図3、図4の物品整列装置10により整列処理される。図3、図4の物品整列装置10は、2個の移動床が下り勾配床面41とともに上り勾配床面40Aを備える面取移動床40とした。小物品1を整列するときには、上り勾配床面40Aを備える面取移動床40が2個以上存することが好ましい。面取移動床40の上り勾配床面40A上の搬送方向に2個以上の物品1が並んだとき、下流側の物品1にしか回転作用が及ばないため、上流側の物品1にも、下流方向に次配置される面取り移動床40による回転作用を及ぼし易くするためである。全部の移動床を面取移動床40としても良い。尚、図14、図15に示した物品整列装置10は、複数の固定床20、移動床30、40を物品搬送方向に沿って水平配置するものにしたが、上り勾配配置(図5、図6)又は下り勾配配置(図7)のものでも良い。
【0071】
尚、以下の整列処理動作は、固定床20の床面21上の搬送方向に2個以上の物品1が並んでいるものについて説明した。但し、固定床20の床面21上に先行する1個の物品1だけが位置する場合にも、ここで説明するように、同様の整列処理動作がなされる。
【0072】
(1)移動床40の上流側に位置する固定床20の床面21上に2個以上の物品1が搬送方向に並んでいる(図14(A))。物品1の重心が位置する側の天面は上方を向いている。物品1の目標整列姿勢は、物品1の天面を下向きにすることである。
【0073】
(2)移動床40の下降により、先行する物品1は、移動床40の上り勾配床面40Aとの接触点を回転中心r1とし、重心Gが回転中心r1より下流側となり、自重により、移動床40の上り勾配床面40Aに沿うように前方へ回転して倒れ込む(図14(B))。後続の物品1が固定床20の床面21の下り勾配に沿って先行する物品1に及ぼす作用力も、先行する物品1の回転中心r1まわりの回転を助長する方向に作用する。固定床20の床面21上に先行する1個の物品1だけが位置する場合は、自重のみにより前方へ回転して倒れ込む。
【0074】
特にこのとき、即ち移動床40の上流側に位置する固定床20の下り勾配床面21の斜面の下向き方向延長線が、移動床40の上り勾配床面40Aの傾斜面と交差する位置関係にあるとき、移動床40の下降を一時停止すると、物品1の回転が生じ易い。移動床40の好ましい停止時間は、0.2〜1.5秒である。
【0075】
(3)移動床40が更に下降し、先行する物品1は移動床40の上り勾配床面40Aの傾斜面に沿うと、その倒れ込みの回転力により、続いて移動床40の上り勾配床面40Aと下り勾配床面41の交差頂点を回転中心r2とし、更に前方へ倒れようとする(図14(C))。後続の物品1が固定床20の下り勾配床面21の下り勾配に沿って先行の物品1に及ぼす作用力も、先行物品1の回転中心r2まわりの回転を助長する方向に作用する。固定床20の床面21上に先行する1個の物品1だけが位置する場合は、自らの倒れ込みの回転力のみにより、更に前方へ倒れようとする。
【0076】
(4)移動床40は下降端に達して停止するが、先行する物品1は、移動床40の上り勾配床面40Aの頂点r2を回転中心として、前方へ倒れ込む。その倒れ込みの回転力に加え、物品1の重心Gも新しい回転中心r2よりも物品搬送方向の前方にあるものになり、物品1の倒れ込みは進行する(図14(D))。後続の物品1が固定床20の下り勾配床面21の下り勾配に沿って先行の物品1に及ぼす作用力も、先行物品1の回転中心r2まわりの回転を助長する方向に作用する。固定床20の床面21上に先行する1個の物品1だけが位置する場合は、前述の如く、倒れ込みの回転力と物品1の重心Gと回転中心r2の位置関係のみにて、倒れ込みは進行する。
【0077】
(5)先行する物品1の倒れ込みは続き、物品1は移動床40の下り勾配床面41と接触する接触部t1を回転中心として、更に前方へ倒れ込む(図15(A))。物品1の重心Gもこの新しい回転中心t1よりも下流側となり、倒れ込みは進行する。後続の物品1は固定床20の下り勾配床面21を滑り続けるが、その移動速度は、先行する物品1の回転に追いつかず、先行する物品1に作用力を及ぼすことなく、天面を上にしたままで前方へ移動する。
【0078】
(6)先行する物品1の回転はその天面が移動床40の下り勾配床面41に到達して終了し、物品1は天面下向きの目標整列姿勢になる(図15(B))。後続の物品1は、天面を上としたままで固定床20の下り勾配床面21から移動床40の側へ移動する。
【0079】
(7)後続の物品1は、天面を上としたままで移動床40の下り勾配床面41へ完全に移動する(図15(C))。後続の物品1は、このような移動を繰り返すうちに、搬送方向に直交する固定床20、移動床30、40の床面長さ方向(搬送方向と直交する方向)に沿う左右にずれ(図15では紙面の奥行き又は手前方向にずれ)、前述(1)の先行物品1におけると同じ位置に移動する。そしてこの後続物品1も上述した先行物品1と同様の整列処理を付与されて天面下向きの目標整列姿勢になる。
【0080】
尚、ここまで述べた小物品1の整列処理動作において、面取移動床40の上り勾配床面40A上の搬送方向に2個以上の物品1が並んだときの上流側の物品1は、天面が上向きの例で説明したが、天面が下向きであっても同様の整列処理動作となる。当然のことながら、上流側の物品1の天面が下向きの目標整列姿勢の場合、物品1の重心Gが下方に位置して既に安定であるので、この向きが維持されたまま下流へと移動する。
【0081】
図16は、物品整列装置10の搬送方向の出口(送出口)に排出コンベア100を接続し、物品整列装置10によって整列された物品1を排出コンベア100により下工程へと排出可能にしたものである。
【0082】
排出コンベア100は物品整列装置10から物品1の送り出し方向(搬送方向)と直交する方向を排出方向にしている。排出コンベア100は物品整列装置10の送出口の固定床20の床面21の最下高さ位置よりわずかに低位にコンベア面を位置付けている。物品整列装置10から送り出された物品1は、排出コンベア100まで滑り落ち、排出コンベア100の排出方向に直交する幅方向の奥側に立設してある位置規制ガイド101に当って停止する。排出コンベア100のコンベア面は水平でも、固定床20の床面21の傾斜に合せて傾けていても良い。物品整列装置10の両側の側板14のうち、排出コンベア100の排出方向寄りの側板14は、物品1が詰まることを防止するため、出口側に切欠部14Aを有する。排出コンベア100は連続的に運転されていても、物品整列装置10からの物品1の送り出しタイミングに合せて間欠的に運転されても良い。物品1の幅に対しコンベア100の幅が大きいときは、排出コンベア100の出口側に幅寄せガイド102を設け、排出コンベア100から送出される物品を1列にすることが、後の工程での後処理が容易になって好ましい。
【0083】
物品整列装置10により天面が下向きに整列された良品の物品1のみが、排出コンベア100の送出過程でセンサ等により選別されて、下工程へと送出される。物品1がキャップの場合、排出コンベア100の後の工程で、キャップの上下反転を行ない、このキャップをキャップ締め機へと移送する。
【0084】
尚、図20は本発明の比較例の物品整列装置10であり、複数の固定床20、移動床30を有するが、本発明の面取移動床40を有していない。この比較例の物品整列装置10による、例えば小物品1の整列処理動作は以下の通りになる。
【0085】
(1)移動床30の床面31上に2個以上の物品1が搬送方向に並んでいる(図20(A))。物品1の重心が位置する側の天面は上方を向いている。物品1の目標整列姿勢は、物品1の天面を下向きにすることである。
【0086】
(2)移動床30の上昇により、先行する物品1は下流の固定床20の頂点との接触点を回転中心r0として、前方へ倒れようとするが、後続の物品1からの作用力が、先行物品1の回転中心r0まわりの回転を抑制する方向に作用するため、先行する物品1は回転することができない(図20(B))。
【0087】
(3)移動床30が更に上昇すると、後続の物品1が先行物品1に及ぼす作用力は、前方の物品1の回転中心r0付近を向き、先行する物品1の回転を抑制する力は弱まるものの、この作用力が抵抗となっていることに変わりはなく、先行する物品1は回転することができない(図20(C))。また、この先行物品1の物品の重心Gも回転中心r0よりも上流側となり、この物品1の前方への倒れ込みは困難である。
【0088】
(4)結局、先行する物品1は回転することなく、そのままの姿勢で、下流の固定床20の床面21へと移動し、後続の物品1も下流の固定床20の床面21へと移動する。従って、物品1の目標整列姿勢である天面下向きには整列できない。
【0089】
本実施例によれば以下の作用効果を奏する。
固定床20と移動床30、40の床面21、31、40A、41に載るサイズの物品でありさえすれば、いずれの物品にも上述の整列姿勢を付与できる。従って、重心に偏りのあるキャップ等の物品1を搬送しつつ整列させる物品整列装置10において、多様な形状の物品1であって、しかも小物品〜大物品の多様なサイズの物品1に対応できる。
【0090】
また、少なくとも一部の移動床40が上り勾配床面40Aを備えるものであれば、物品1の前述した整列処理を行なうことができる。従って、複数の固定床20と移動床30、40を互いに上り勾配、下り勾配、水平のいずれにも配置できる。
【0091】
また、複数の固定床20と移動床30、40による物品1の搬送方向全域(入口シュート12〜排出コンベア100)で前述の整列処理がなされ、かつそれらの固定床20、移動床30、40の搬送方向に直交する床面長さの全域で上述の整列処理がなされる。従って、物品整列装置10の占有面積あたりの整列能力(生産性)が高い。
【0092】
また、各固定床20の下り勾配床面21及び移動床30、40の下り勾配床面31、41の勾配と、移動床30、40の昇降動作に応じて物品1をそれらの床面上にて滑らせ、又は転がして搬送しつつ上述の整列処理を行なう。このとき、移動床30、40の昇降動作は、物品1がそれらの床面31、40A、41に当ってキズつくほどの高速とする必要がない。従って、物品1をキズつけることなく整列できる。
【産業上の利用可能性】
【0093】
本発明によれば、重心に偏りのあるキャップ等の物品を搬送しつつ整列させる物品整列装置において、多様な形状の物品であって、しかも小物品〜大物品の多様なサイズの物品に対応でき、複数の固定床と移動床を互いに上り勾配、下り勾配、水平のいずれにも配置でき、占有面積あたりの整列能力(生産性)を高く、物品をキズつけることなく整列できる。
【符号の説明】
【0094】
1 物品
10 物品整列装置
20 固定床
21 下り勾配床面
30 通常移動床
31 下り勾配床面
40 面取移動床
40A 上り勾配床面
41 下り勾配床面
【特許請求の範囲】
【請求項1】
重心に偏りのある物品を搬送しつつ整列させる物品整列装置であって、
複数の固定床と移動床を物品搬送方向に沿って交互に配置するとともに、各固定床と各移動床が物品搬送方向の下流側に向けて下り勾配をなすように傾斜した下り勾配床面を備え、各移動床を同時にそれらの床面が隣接する固定床の床面に対する上位と下位に位置付ける昇降動作を繰り返し、
少なくとも一部の移動床が、上記下り勾配床面に対する物品搬送方向の上流側に、物品搬送方向の下流側に向けて上り勾配をなすように傾斜した上り勾配床面を備えてなる物品整列装置。
【請求項2】
前記移動床に備える上り勾配床面の上り勾配に沿う床面長さを、物品の高さ未満とする請求項1に記載の物品整列装置。
【請求項3】
前記複数の移動床の全部が、前記上り勾配床面を備える請求項1又は2に記載の物品整列装置。
【請求項4】
前記複数の固定床の各個の床面を互いに搬送方向の下流側に向けて上り勾配をなすように配置するとともに、前記複数の移動床の各個の床面を互いに搬送方向の下流側に向けて上り勾配をなすように配置してなる請求項1〜3のいずれかに記載の物品整列装置。
【請求項5】
前記複数の固定床の各個の床面を互いに搬送方向の下流側に向けて下り勾配をなすように配置するとともに、前記複数の移動床の各個の床面を互いに搬送方向の下流側に向けて下り勾配をなすように配置してなる請求項1〜3のいずれかに記載の物品整列装置。
【請求項6】
前記複数の固定床の各個の床面を互いに搬送方向の下流側に向けて水平をなすように配置するとともに、前記複数の移動床の各個の床面を互いに搬送方向の下流側に向けて水平をなすように配置してなる請求項1〜3のいずれかに記載の物品整列装置。
【請求項1】
重心に偏りのある物品を搬送しつつ整列させる物品整列装置であって、
複数の固定床と移動床を物品搬送方向に沿って交互に配置するとともに、各固定床と各移動床が物品搬送方向の下流側に向けて下り勾配をなすように傾斜した下り勾配床面を備え、各移動床を同時にそれらの床面が隣接する固定床の床面に対する上位と下位に位置付ける昇降動作を繰り返し、
少なくとも一部の移動床が、上記下り勾配床面に対する物品搬送方向の上流側に、物品搬送方向の下流側に向けて上り勾配をなすように傾斜した上り勾配床面を備えてなる物品整列装置。
【請求項2】
前記移動床に備える上り勾配床面の上り勾配に沿う床面長さを、物品の高さ未満とする請求項1に記載の物品整列装置。
【請求項3】
前記複数の移動床の全部が、前記上り勾配床面を備える請求項1又は2に記載の物品整列装置。
【請求項4】
前記複数の固定床の各個の床面を互いに搬送方向の下流側に向けて上り勾配をなすように配置するとともに、前記複数の移動床の各個の床面を互いに搬送方向の下流側に向けて上り勾配をなすように配置してなる請求項1〜3のいずれかに記載の物品整列装置。
【請求項5】
前記複数の固定床の各個の床面を互いに搬送方向の下流側に向けて下り勾配をなすように配置するとともに、前記複数の移動床の各個の床面を互いに搬送方向の下流側に向けて下り勾配をなすように配置してなる請求項1〜3のいずれかに記載の物品整列装置。
【請求項6】
前記複数の固定床の各個の床面を互いに搬送方向の下流側に向けて水平をなすように配置するとともに、前記複数の移動床の各個の床面を互いに搬送方向の下流側に向けて水平をなすように配置してなる請求項1〜3のいずれかに記載の物品整列装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2011−219188(P2011−219188A)
【公開日】平成23年11月4日(2011.11.4)
【国際特許分類】
【出願番号】特願2010−87347(P2010−87347)
【出願日】平成22年4月5日(2010.4.5)
【出願人】(000000918)花王株式会社 (8,290)
【公開日】平成23年11月4日(2011.11.4)
【国際特許分類】
【出願日】平成22年4月5日(2010.4.5)
【出願人】(000000918)花王株式会社 (8,290)
[ Back to top ]