
物品管理システム、物品管理方法及び物品管理プログラム
【課題】効率よく、物品を管理する情報を自動で生成する。
【解決手段】倉庫内の物品の周辺を移動する移動体に、アクティブRFIDタグと、パッシブRFIDリーダを設け、倉庫内にアクティブRFIDタグの無線信号を受信する複数のアクティブRFIDリーダを設けておく。また、物品を管理する情報を生成する管理装置10の検出部36が、エリア情報DB50を参照し、アクティブRFIDリーダそれぞれで受信される無線信号の信号強度に基づいて、移動体60の時刻毎の位置を検出し、時刻特定部40が、タグIDがパッシブRFIDリーダにより読み取られた時刻を特定し、生成部42が、時刻特定部の特定結果と、検出部の検出結果との関係から、タグIDの取得位置(エリア)を含む物品を管理する情報(管理情報DB56)を生成するようにする。
【解決手段】倉庫内の物品の周辺を移動する移動体に、アクティブRFIDタグと、パッシブRFIDリーダを設け、倉庫内にアクティブRFIDタグの無線信号を受信する複数のアクティブRFIDリーダを設けておく。また、物品を管理する情報を生成する管理装置10の検出部36が、エリア情報DB50を参照し、アクティブRFIDリーダそれぞれで受信される無線信号の信号強度に基づいて、移動体60の時刻毎の位置を検出し、時刻特定部40が、タグIDがパッシブRFIDリーダにより読み取られた時刻を特定し、生成部42が、時刻特定部の特定結果と、検出部の検出結果との関係から、タグIDの取得位置(エリア)を含む物品を管理する情報(管理情報DB56)を生成するようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本件は、物品管理システム、物品管理方法及び物品管理プログラムに関する。
【背景技術】
【0002】
ICタグを利用して倉庫内等における物品の位置情報を管理する管理システムについては、従来から種々提案されている。
【0003】
例えば、パッシブRFIDタグやアクティブRFIDタグを管理対象の物品全てに設けることで、物品の管理を行う技術が存在している。また、特許文献1には、ICタグを用いた倉庫管理システムが開示されている。この特許文献1のシステムでは、ICタグの情報を読み取った装置(子機)が、読み取った情報をタグリーダ(親機)に転送するとともに、フロアに設置された装置(フロアタグ)に通知する。そして、フロアタグが、当該フロアタグの位置を特定する情報とともに、その位置から子機までの距離を特定する情報を、親機に送信することで、ICタグの3次元位置を検出する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−180008号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、パッシブRFIDタグを管理対象の物品全てに設ける場合、作業者は、パッシブRFIDタグリーダを備えるハンディターミナル等でタグを読み取るとともに、読み取った位置情報を手入力するなどする必要がある。一方、アクティブRFIDタグを管理対象の物品全てに設けることで、位置情報の入力等は不要になる。しかるに、アクティブRFIDタグはパッシブRFIDタグに比べて高価である。
【0006】
また、上記特許文献1に記載のシステムでは、子機と通信するフロアタグをエリア毎に設置する必要があるため、手間とコストがかかり効率が悪い。
【0007】
そこで本件は上記の課題に鑑みてなされたものであり、効率よく、物品を管理する情報を自動で生成することが可能な物品管理システム、物品管理方法及び物品管理プログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本明細書に記載の物品管理システムは、識別情報を保持する情報保持媒体が設けられた複数の物品の周辺を移動する移動体に設けられた、無線信号を発信するアクティブタグと、前記移動体に設けられた、前記情報保持媒体から前記識別情報を非接触で取得する取得装置と、前記移動体の移動範囲内又はその周辺に設けられ、前記アクティブタグの無線信号を受信する複数のアクティブタグ受信装置と、前記複数の物品を管理する情報を生成する管理情報生成装置と、を備え、前記管理情報生成装置は、前記アクティブタグの位置ごとに、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部と、前記格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出する検出部と、前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定する時刻特定部と、前記時刻特定部の特定結果と、前記検出部の検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する生成部と、を有している。
【0009】
本明細書に記載の物品管理方法は、無線信号を発信するアクティブタグと、識別情報を保持する情報保持媒体から前記識別情報を非接触で取得する取得装置と、を有する移動体を、前記情報保持媒体が設けられた複数の物品の周辺を移動させることで、前記複数の対象物品を管理する情報を生成する物品管理方法であって、前記アクティブタグの位置ごとに、前記移動体の移動範囲内又はその周辺に設けられた複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出する検出工程と、前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定する時刻特定工程と、前記時刻特定工程の特定結果と、前記検出工程の検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する生成工程と、をコンピュータが実行する物品管理方法である。
【0010】
本明細書に記載の物品管理プログラムは、無線信号を発信するアクティブタグと、識別情報を保持する情報保持媒体から前記識別情報を非接触で取得する取得装置と、を有する移動体を、前記情報保持媒体が設けられた複数の物品の周辺を移動させ、当該移動中に取得される情報に基づいて前記複数の対象物品を管理する情報を生成する物品管理プログラムであって、前記アクティブタグの位置ごとに、前記移動体の移動範囲内又はその周辺に設けられた複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出し、前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定し、前記特定結果と、前記検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する、処理をコンピュータに実行させる物品管理プログラムである。
【発明の効果】
【0011】
本明細書に記載の物品管理システム、物品管理方法及び物品管理プログラムは、効率よく、物品を管理する情報を自動で生成することができるという効果を奏する。
【図面の簡単な説明】
【0012】
【図1】一実施形態に係る物品管理システムが導入された倉庫内の状態を概略的に示す図である。
【図2】物品管理システムのブロック図である。
【図3】図2の管理装置のハードウェア構成図である。
【図4】管理装置の機能ブロック図である。
【図5】エリア情報DBを示す図である。
【図6】エリア情報DBにおけるエリアを説明するための図である。
【図7】時刻毎位置DBを示す図である。
【図8】第2受付部による取得結果の一例を示す図である。
【図9】時刻特定部による検出時刻の特定方法を説明するための図である。
【図10】図10(a)は、特定時刻DBを示す図であり、図10(b)は、時刻毎位置DBを示す図であり、図10(c)は、管理情報DBを示す図である。
【図11】データ取得処理を示すフローチャートである。
【図12】アクティブタグ位置情報算出処理を示すフローチャート(その1)である。
【図13】アクティブタグ位置情報算出処理を示すフローチャート(その2)である。
【図14】パッシブタグ検出時刻算出処理を示すフローチャートである。
【図15】パッシブタグ位置情報算出処理を示すフローチャートである。
【図16】変形例に係る原点タグを示す図である。
【図17】原点タグを用いた図11の処理の開始、終了を自動判定するための処理を示すフローチャートである。
【図18】変形例に係る電波の出力と通信範囲の関係を示す表である。
【発明を実施するための形態】
【0013】
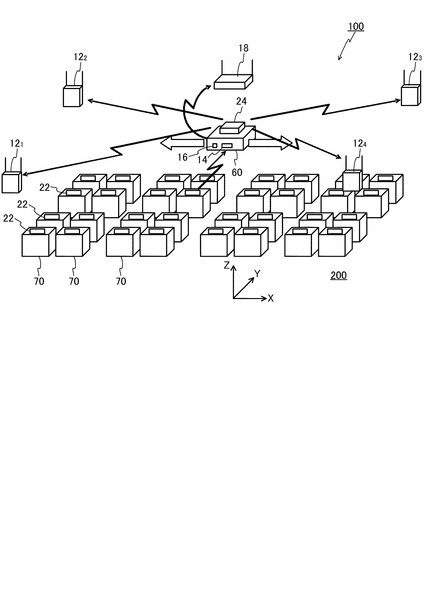
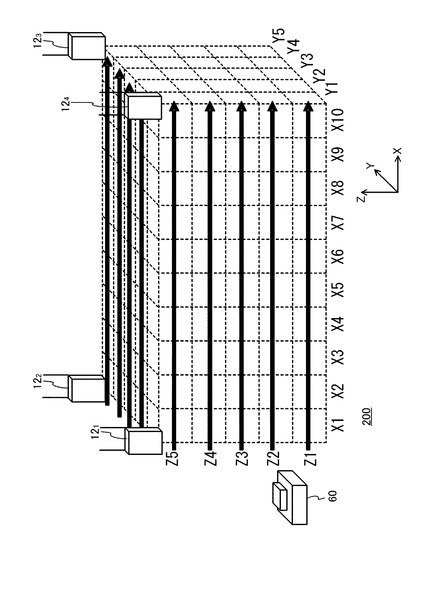
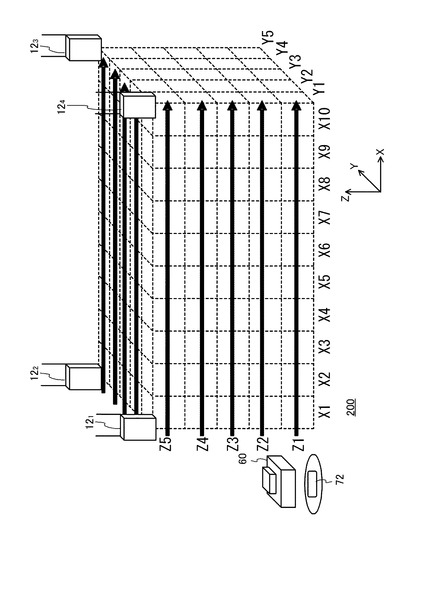
以下、物品管理システムの一実施形態について、図1〜図15に基づいて詳細に説明する。図1には、一実施形態に係る物品管理システム100が導入された倉庫200内の状態が模式的に示されている。この図1に示すように、倉庫200内には、管理対象である多種多様な物品70が配列され、保管されているものとする。物品70それぞれには、識別情報保持媒体としてのパッシブRFIDタグ22が設けられているものとする。パッシブRFIDタグ22は、電池を内蔵しておらず、アクティブRFIDタグに比べて安価なタグである。
【0014】
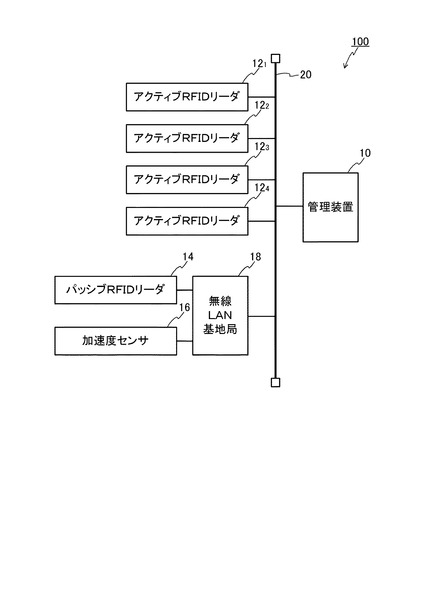
物品管理システム100は、倉庫200内に設けられた複数(図1では4つ)のアクティブタグ受信装置としてのアクティブRFIDリーダ121、122、123、124と、倉庫200内を移動する移動体60に設けられたアクティブタグとしてのアクティブRFIDタグ24、取得装置としてのパッシブRFIDリーダ14及び検出装置としての加速度センサ16と、倉庫200内又は倉庫200近傍に設けられた無線LAN基地局18と、管理情報生成装置としての管理装置10(図2参照)と、を備える。物品管理システム100の各装置は、図2に示すLAN20に対して、直接的、又は間接的に(すなわち、無線LAN基地局18を介して)接続されている。
【0015】
ここで、移動体60は、例えば、ラジコン飛行機、ラジコンヘリコプター、ラジコン飛行船などであり、作業者の操作に応じて倉庫200内を自由に(XYZ3次元方向に)移動することが可能であるものとする。
【0016】
アクティブRFIDリーダ121〜124は、移動体60の移動範囲内又はその周辺に設けられている。これらアクティブRFIDリーダ121〜124は、移動体60に設けられたアクティブRFIDタグ24から発信される無線信号(電波)を受信し、当該受信強度(RSSI(Received Signal Strength Indication)値)を管理装置10に対して送信する。アクティブRFIDタグ24は、電池を内蔵しており、アクティブRFIDリーダ121〜124が受信可能な無線信号(電波)を発信する機能を有している。
【0017】
パッシブRFIDリーダ14は、電波を発し、パッシブRFIDタグ22において反射された一部の電波を受信する。パッシブRFIDタグ22において反射された電波には、パッシブRFIDタグ22が有する識別情報(「タグID」とも呼ぶ))が乗せられる。これにより、パッシブRFIDリーダ14では、パッシブRFIDタグ22が有するタグIDを非接触で読み取ることができるとともに、読み取ったときの電波の受信強度(RSSI値)を取得することができる。
【0018】
加速度センサ16は、移動体60のX,Y,Z方向に関する加速度を測定する。なお、パッシブRFIDリーダ14と加速度センサ16は、図1及び図2に示すように無線LAN基地局18に無線にて接続されている。これにより、パッシブRFIDリーダ14による読み取り結果(タグID)及び取得結果(受信強度)と、加速度センサ16による測定結果(加速度)は、無線LAN基地局18を介して、管理装置10に送信されるようになっている。
【0019】
管理装置10は、アクティブRFIDリーダ121〜124から送信されてくる無線信号の受信強度や、加速度センサ16の測定結果に基づいて、移動体60の時刻毎の位置を特定する。また、管理装置10は、パッシブRFIDリーダ14の取得結果(受信強度)に基づいて、タグIDそれぞれの読み取り時刻を特定する。そして、管理装置10は、移動体60の時刻毎の位置とタグIDそれぞれの読み取り時刻とに基づいて各物品70の位置情報を特定し、当該位置情報とタグIDとを、物品70を管理する情報として管理する。
【0020】
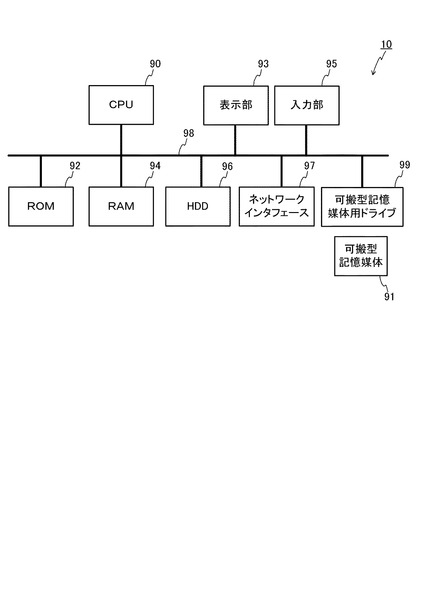
図3には、管理装置10のハードウェア構成が示されている。図3に示すように、管理装置10は、CPU90、ROM92、RAM94、記憶部(ここではHDD(Hard Disk Drive))96、表示部93、入力部95、及び可搬型記憶媒体用ドライブ99等を備えている。管理装置10の構成各部は、バス98に接続されている。表示部93は、液晶ディスプレイ等を含み、入力部95は、キーボード、マウス等を含んでいる。管理装置10では、ROM92あるいはHDD96に格納されているプログラム(物品管理プログラム)、或いは可搬型記憶媒体用ドライブ99が可搬型記憶媒体91から読み取ったプログラム(物品管理プログラム)をCPU90が実行することにより、図4の各部を実現する。
【0021】
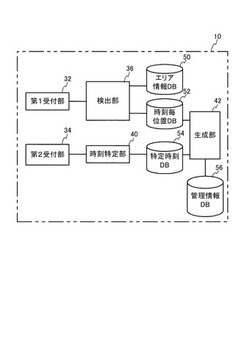
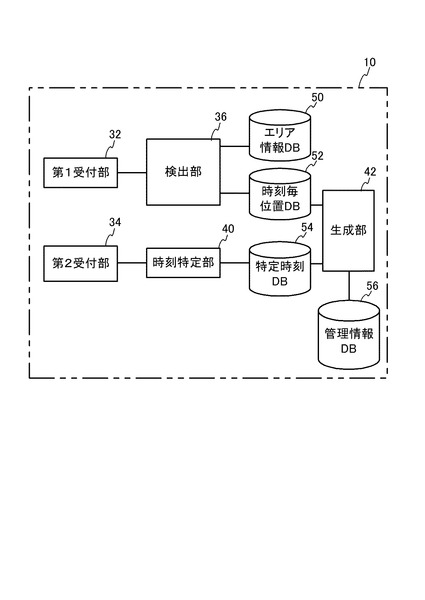
図4には、管理装置10の機能ブロック図が示されている。図4に示すように、管理装置10では、CPU90が物品管理プログラムを実行することにより、第1受付部32、第2受付部34、検出部36、時刻特定部40、生成部42を実現する。なお、図4では、HDD96等に格納されている各種データベース(DB)についても図示している。
【0022】
第1受付部32は、アクティブRFIDリーダ121〜124において検出された無線信号(電波)の受信強度(RSSI値)、及び加速度センサ16による測定結果(加速度)を受付け、検出部36に対して送信する。
【0023】
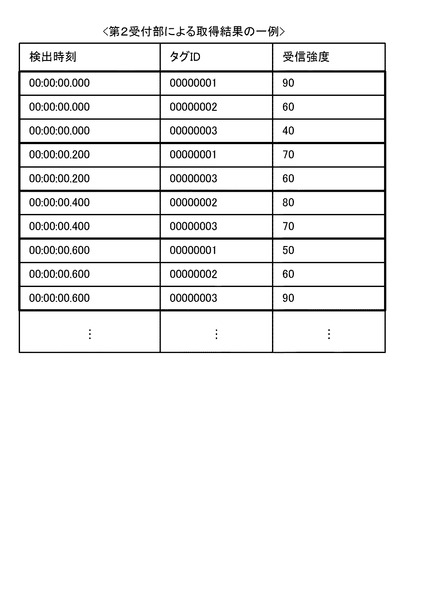
第2受付部34は、パッシブRFIDリーダ14によるタグIDの読み取り結果及び受信強度(RSSI値)を、無線LAN基地局18を介して受付け、時刻特定部40に対して送信する。この場合、第2受付部34は、パッシブRFIDリーダ14が各パッシブRFIDタグ22から受信したタグIDと、タグIDを受信したときの電波の受信強度とを、所定時間間隔で取得するものとする。なお、図8には、第2受付部34の取得結果の一例が示されている。図8に示すように、第2受付部34では、同時刻において複数のパッシブRFIDタグ22のタグIDを受信するが、そのときの電波の受信強度は様々となっている。なお、電波の受信強度は、パッシブRFIDタグ22それぞれの個体差や、パッシブRFIDリーダ14との距離などにより変化する。
【0024】
検出部36は、格納部としてのエリア情報DB50を参照して、アクティブRFIDリーダ121〜124それぞれで受信される無線信号(電波)の受信強度(RSSI値)に基づいて、移動体60の時刻毎の位置を検出する。そして、検出部36は、当該検出結果を用いて、時刻毎位置DB52を更新する。なお、詳細については後述するが、検出部36は、移動体60の時刻毎の位置検出を行う際に、アクティブRFIDリーダ121〜124における受信強度のほか、加速度センサ16の測定結果(時刻毎の加速度)も考慮するものとする。
【0025】
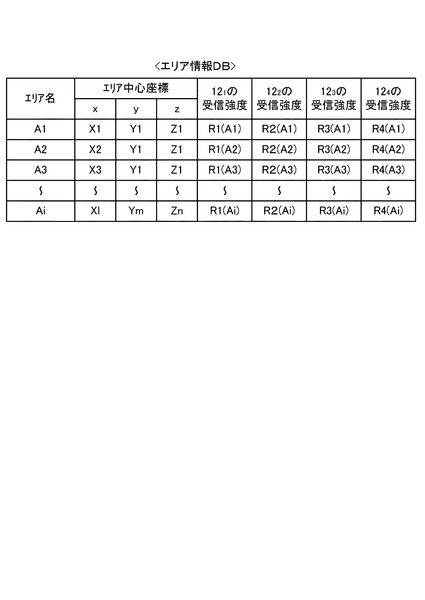
ここで、エリア情報DB50は、図5に示すように、「エリア名」、「エリア中心座標(x,y,z)」、「アクティブRFIDリーダ121〜124の受信強度」の各フィールドを有している。「エリア名」のフィールドには、図6に示すように、倉庫200内の空間に設けられた立方体状の仮想的な領域の名称(A1,A2…Ai)が入力される。「エリア中心座標(x,y,z)」のフィールドには、各仮想的な領域(A1,A2…Ai)の中心座標が入力される。「アクティブRFIDリーダ121〜124の受信強度」のフィールドには、移動体60(アクティブRFIDタグ24)を各中心座標に位置決めしたときのアクティブRFIDリーダ121〜124における無線信号の受信強度が入力される。なお、エリア情報DB50の作成にあたっては、各中心座標に移動体60を人手等により順次位置決めし、各エリアにおけるアクティブRFIDリーダ121〜124それぞれにおける無線信号の受信強度を収集することとする。なお、エリア情報DB50の作成処理は、倉庫200内にアクティブRFIDリーダ121〜124を設置した後に行うこととすればよい。ただし、これに限らず、倉庫200とは別の場所に、倉庫200における設置条件と同一の条件となるようにアクティブRFIDリーダ121〜124を設置し、その状態で上記処理を行うことで、エリア情報DB50を作成するようにしても良い。
【0026】
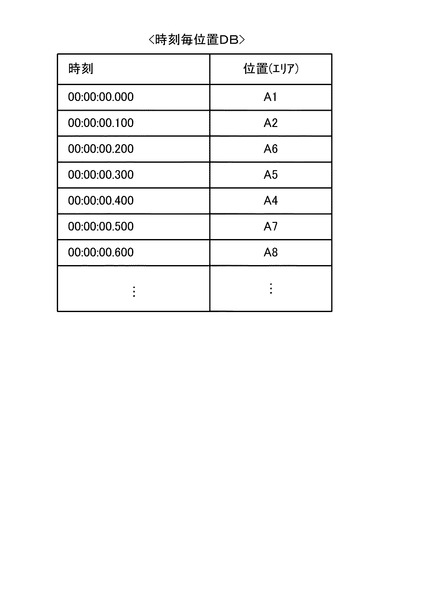
図7には、時刻毎位置DB52が示されている。この時刻毎DB52は、時刻毎に移動体60(アクティブRFIDタグ24)が存在していた位置(エリア)を格納するデータベースである。
【0027】
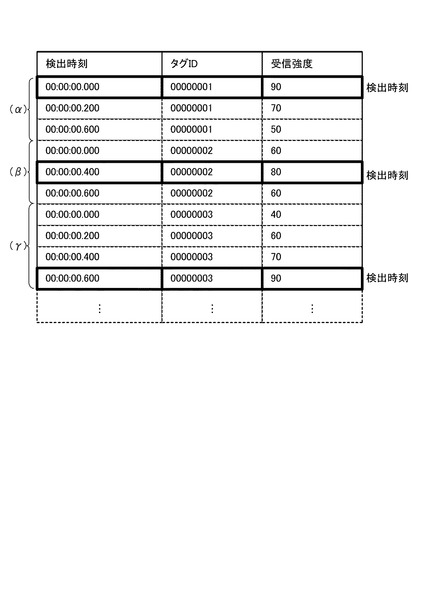
図4に戻り、時刻特定部40は、第2受付部34による取得結果(図8)に基づいて、各タグIDの検出時刻(図9の太枠参照)を特定する。なお、各タグIDの検出時刻の具体的な取得方法については、後に詳述する。時刻特定部40は、特定した各タグIDの検出時刻を、タグID及び受信強度とともに、図10(a)に示す特定時刻DB54に格納する。
【0028】
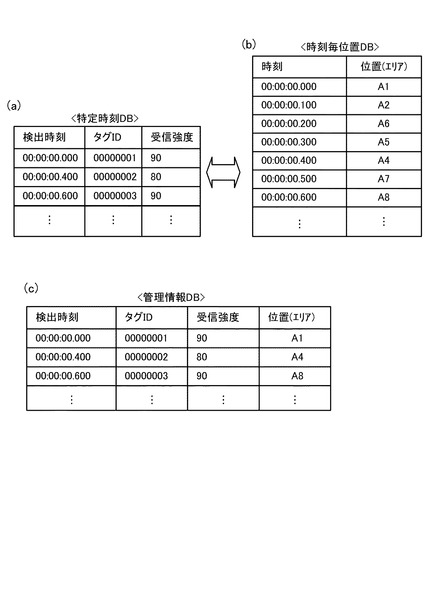
生成部42は、図10(b)(図7と同様)の時刻毎位置DB52と図10(a)の特定時刻DB54とを用いて、タグIDの取得位置(エリア)を決定する。また、生成部42は、当該タグIDの取得位置(エリア)とタグIDとを含む情報を、物品の管理情報として、管理情報DB56(図10(c)参照)に格納する。なお、管理情報DB56は、図10(c)に示すように、「検出時刻」、「タグID」、「受信強度」、「位置(エリア)」のフィールドを有している。
【0029】
次に、物品管理システム100における処理について、詳細に説明する。以下においては、データ取得処理(図11)、アクティブタグ位置情報算出処理(図12、図13)、パッシブタグ検出時刻算出処理(図14)、パッシブタグ位置情報算出処理(図15)について、順を追って説明する。
【0030】
<データ取得処理>
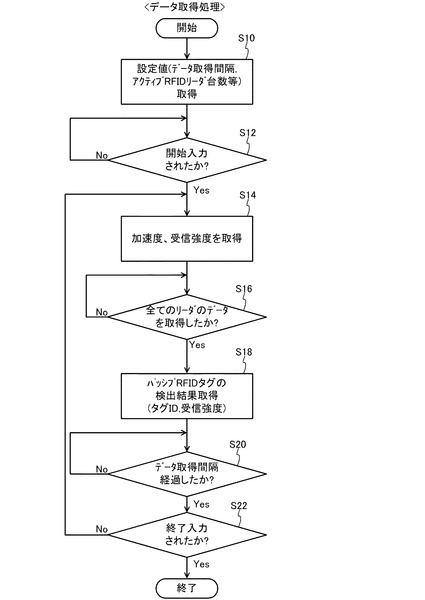
まず、図11のフローチャートに沿って、データ取得処理について説明する。図11の処理では、まず、ステップS10において、第1受付部32及び第2受付部34が、設定値(データ取得間隔や、アクティブRFIDリーダの台数等)を取得する。この設定値は、入力部95等を介して、予め作業者等により管理装置10に入力されている値であるものとする。
【0031】
次いで、ステップS12では、第1受付部32が、開始入力されるまで待機する。ここで、作業者は、例えば、図6に示すように移動体60を倉庫200の床面上に静止させた状態(X,Y,Z方向の速度Vx、Vy、Vzが0の状態)で、管理装置10の入力部95から開始入力を行うものとする。そして、作業者は、開始入力を行った直後から、複数の物品70上方の空間における移動体60の移動を開始するものとする。なお、作業者は、図11の以降の処理が行われる間(作業者が終了入力をするまでの間)、移動体60が各物品70の上方を通過するように、移動体60を移動させるものとする。例えば、作業者は、移動体60のY軸方向及びZ軸方向の位置を変更しつつ、移動体60のX軸方向に沿った往復移動を繰り返し行うものとする。図11のステップS12では、作業者による開始入力がなされた段階で判断が肯定され、ステップS14に移行する。
【0032】
ステップS14に移行すると、第1受付部32は、アクティブRFIDリーダ121〜124の検出結果(受信強度)及び加速度センサ16の取得結果(加速度)を取得する。
【0033】
次いで、ステップS16では、第1受信部32が、全てのアクティブRFIDリーダ121〜124のデータを取得したか否かを判断する。ここでの判断が否定された場合には、ステップS16を再度繰り返すが、ここでの判断が肯定された場合には、ステップS18に移行する。
【0034】
ステップS18に移行すると、第2受付部34が、パッシブRFIDリーダ14の検出結果(タグID,受信強度)を取得する。
【0035】
次いで、ステップS20では、第1受付部32(又は第2受付部34)が、データ取得のための時間(データ取得間隔)が経過するまで待機する。そして、データ取得間隔が経過した段階で、ステップS22に移行し、第1受付部32(又は第2受付部34)は、終了入力されたか否かを判断する。この終了入力は、作業者が移動体60を倉庫200内において隈なく移動させた後に、管理装置10の入力部95から入力するものである。ステップS22の判断が否定された場合には、ステップS14に戻る。すなわち、終了入力があるまでは、ステップS14、S18の処理を、データ取得間隔毎に繰り返す。
【0036】
これにより、第1受付部32では、データ取得間隔毎に、アクティブRFIDリーダ121〜124の受信強度及び移動体60の加速度を取得することができる。また、第2受付部34では、データ取得間隔毎に、パッシブRFIDリーダ14が取得したタグID及び受信強度を取得することができる(図8)。なお、図8の「検出時刻」は、ステップS12において開始入力がされてから所定時間(例えばデータ取得間隔)が経過した後の時刻を「00:00:00.000」としている。ただし、これに限らず、時刻としては、倉庫100の存在する場所の標準時を用いることとしてもよい。
【0037】
その後、作業者により終了入力が行われると、図11の全処理を終了する。
【0038】
<アクティブタグ位置情報算出処理>
次に、図12、図13に基づいて、検出部36によるアクティブタグ位置情報算出処理について、詳細に説明する。この図12、図13の処理では、図11の処理で第1受付部32が取得したアクティブRFIDリーダ121〜124の受信強度及び移動体60の加速度を用いるものとする。
【0039】
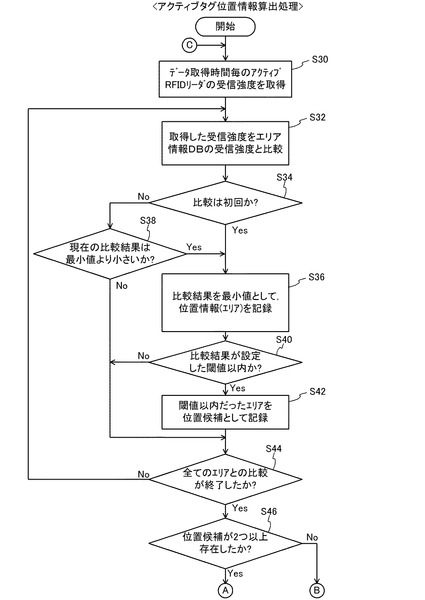
図12、図13の処理では、まず、図12のステップS30において、検出部36が、データ取得時刻毎のアクティブRFIDリーダ121〜124の受信強度を取得する。ここでは、たとえば、検出部36は、時刻00:00:00.000におけるアクティブRFIDリーダ121〜124の受信強度を取得したものとする。次いで、ステップS32では、検出部36が、取得した受信強度(アクティブRFIDリーダ121〜124それぞれの受信強度をR1’、R2’、R3’、R4’とする)と、エリア情報DB50に格納されているあるエリアの受信強度(ここでは、エリア名「A1」の受信強度(R1(A1),R2(A1),R3(A1),R4(A1))とする)とを比較する。この比較では、検出部36は、次式(1)によりS(A1)を求めるものとする。
S(A1)=(|R1'-R1(A1)|)/R1(A1)+(|R2'-R2(A1)|)/R2(A1)
+(|R3'-R3(A1)|)/R3(A1)+(|R4'-R4(A1)|)/R4(A1) …(1)
ただし、例えば受信強度のいずれか(例えば、R1(A1))の値が0であった場合には、上式(1)の該当する項(例えば、(|R1'-R1(A1)|)/R1(A1))を0とするものとする。
【0040】
次いで、ステップS34では、検出部36が、エリア情報DB50の受信強度との比較が初回であるか否かを判断する。ここでの判断が肯定されると、ステップS36に移行する。ステップS36では、検出部36が、比較結果を最小値として、位置情報(エリア)(ここではエリアA1)を記録する。
【0041】
次いで、ステップS40では、検出部36が、比較結果が予め設定されている閾値以内か否かを判断する。ここで、比較結果(最小値)が閾値以内である場合とは、移動体60が比較に用いたエリア(ここではエリアA1)内に存在している可能性が高いことを意味する。ここでの判断が肯定された場合には、ステップS42に移行する。ステップS42では、検出部36が、閾値以内だったエリア(A1)を位置候補として記録する。そして、その後はステップS44に移行する。なお、ステップS40の判断が否定された場合には、ステップS42を経ずに、すなわち、エリア(A1)を位置候補とはせずに、ステップS44に移行する。
【0042】
ステップS44に移行すると、検出部36は、全てのエリアとの比較が終了したか否かを判断する。ここでの判断が否定された場合には、ステップS32に戻る。
【0043】
ステップS32に戻ると、検出部36は、ステップS30で取得したアクティブRFIDリーダ121〜124の受信強度と、エリア情報DB50の次のエリアの受信強度(例えばエリアA2の受信強度(R1(A2),R2(A2),R3(A2),R4(A2))との比較を行う。この比較では、検出部36は、次式(2)によりS(A2)を求めるものとする。
S(A2)=(|R1'-R1(A2)|)/R1(A2)+(|R2'-R2(A2)|)/R2(A2)
+(|R3'-R3(A2)|)/R3(A2)+(|R4'-R4(A2)|)/R4(A2) …(2)
ただし、例えば受信強度のいずれか(例えば、R1(A2))の値が0であった場合には、上式(2)の該当する項(例えば、(|R1'-R1(A2)|)/R1(A2))を0とするものとする。
【0044】
そして、ステップS34では、検出部36は、今回の比較が初回であるか否かを判断する。ここでは、2回目の比較であるので、判断が否定され、ステップS38に移行する。ステップS38では、現在の比較結果が、前回のステップS36で記録された最小値よりも小さいか否かを判断する。ここでの判断が否定された場合には、ステップS44に移行する。一方、ここでの判断が肯定された場合には、ステップS36に移行する。ステップS36では、検出部36が、比較結果を最小値として、位置情報(エリア)を記録する。そして、次のステップS40では、検出部36は、比較結果が閾値以内かを判断し、ここでの判断が肯定された場合には、ステップS42において、比較したエリア(A2)を位置候補として記録する。
【0045】
以降、ステップS44の判断が肯定されるまで、ステップS32〜S42の処理を繰り返す。すなわち、上記と同様、検出部36は、アクティブRFIDリーダ121〜124の受信強度と、エリア情報DB50の全てのエリアの受信強度との比較を、上式(1)、(2)と同様に実行するなどして、位置候補の記録(S42)を実行する。
【0046】
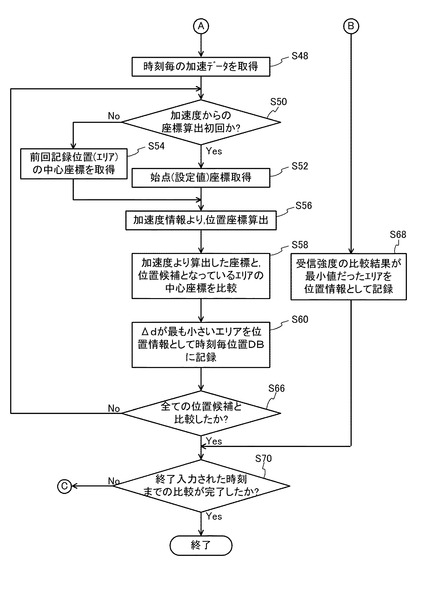
そして、全てのエリアとの比較が終了し、ステップS44の判断が肯定されると、ステップS46に移行する。ステップS46では、検出部36が、位置候補が2つ以上存在したか否か、すなわちステップS48を複数回経たか否かを判断する。ここでの判断が肯定された場合(位置候補が2つ以上存在した場合)には、図13のステップS48に移行する。なお、ステップS46の判断が否定された場合(位置候補が0又は1であった場合)には、図13のステップS68に移行する。ステップS68では、検出部36は、受信強度の比較結果(ステップS32の比較結果)が最小値であったエリアを、位置情報として時刻毎位置DB52(図7、図10(b))に記録する。その後は、ステップS70に移行する。
【0047】
一方、ステップS46の判断が肯定され、図13のステップS48に移行すると、検出部36は、時刻毎の加速度のデータを取得する。次いで、ステップS50では、検出部36が、加速度からの座標算出が初回であるか否かを判断する。ここでの判断が肯定された場合、すなわち初回である場合には、ステップS52に移行し、検出部36は、始点(設定値)座標を取得する。その後は、ステップS56に移行する。一方、ステップS50の判断が否定された場合、すなわち初回で無い場合には、ステップS54において、検出部36が、前回記録位置(エリア)の中心座標を取得する。その後は、ステップS56に移行する。なお、ステップS52又はS54で取得した始点座標又は前回記録エリアの中心座標を(Xl',Ym',Zn')と表すものとする。
【0048】
ステップS56に移行すると、検出部36は、加速度のデータと、始点座標又は前回記録エリアの中心座標と、に基づいて、以下の手順で、移動体60の位置座標を算出する。
【0049】
まず、検出部36は、X,Y,Z方向の加速度(Ax,Ay,Azとする)を用いて、X,Y,Z方向の速度を算出する。具体的には、速度(Vx、Vy、Vz)は次式(3)〜(5)にて算出することができる。なお、T2は、図11のステップS20におけるデータ取得間隔、Vx',Vy',Vz'は、前回速度とする。ただし、ステップS52を経た場合(始点座標を利用する場合)には、Vx'=Vy'=Vz'=0であるものとする。
Vx=Vx'+Ax・T2 …(3)
Vy=Vy'+Ay・T2 …(4)
Vz=Vz'+Az・T2 …(5)
【0050】
次いで、検出部36は、始点座標又は前回記録エリアの中心座標(Xl',Ym',Zn')と上記速度(Vx,Vy,Vz)より、移動体60の位置座標(Xl”,Ym”,Zn”)を次式(6)〜(8)より算出する。以上により、ステップS56の処理を終了する。
Xl”=Xl'+Vx・T2 …(6)
Ym”=Ym'+Vy・T2 …(7)
Zn”=Zn'+Vz・T2 …(8)
【0051】
次いで、ステップS58では、検出部36が、上式(3)〜(8)から算出した座標と、位置候補となっている2つ以上のエリアの中心座標それぞれとを比較する。なお、この比較においては、次式(9)に基づいて、位置候補となっている各エリアごとにΔdを算出する。なお、(Xl,Ym、Zn)は、位置候補となっている各エリアの中心座標を意味するものとする。
Δd=(|Xl−Xl”|)+(|Ym−Ym”|)+(|Zn−Zn”|)
…(9)
【0052】
次いで、ステップS60では、検出部36が、位置候補となっているエリアごとに算出されたΔdを比較し、Δdが最も小さいエリアを抽出する。そして、検出部36は、Δdが最も小さいエリアを移動体60の位置情報(時刻「00:00:00.000」において移動体60が位置していたエリア)として、時刻毎位置DB52(図7、図10(b))に記録する。その後は、ステップS70に移行する。
【0053】
ステップS70では、検出部36が、終了入力がされた時刻までの比較が完了したか否かを判断する。ここでの判断が否定された場合には、図12のステップS30に戻る。これ以降は、図11の処理においてデータを取得した全ての時刻における移動体60の位置情報(エリア)を取得するまで、ステップS30〜S70の処理・判断を繰り返す。そして、ステップS70の判断が肯定された段階で、図12、図13の全処理を終了する。
【0054】
以上の処理を行うことで、図7(図10(b))に示すような時刻毎位置DB52が生成されることになる。
【0055】
<パッシブタグ検出時刻算出処理>
次に、図14に基づいて、時刻特定部40によるパッシブタグ検出時刻算出処理について、詳細に説明する。この図14の処理は、図11の処理で第2受付部34がデータ取得間隔毎に取得したタグID、及びパッシブRFIDリーダ14の受信強度を用いた処理である。
【0056】
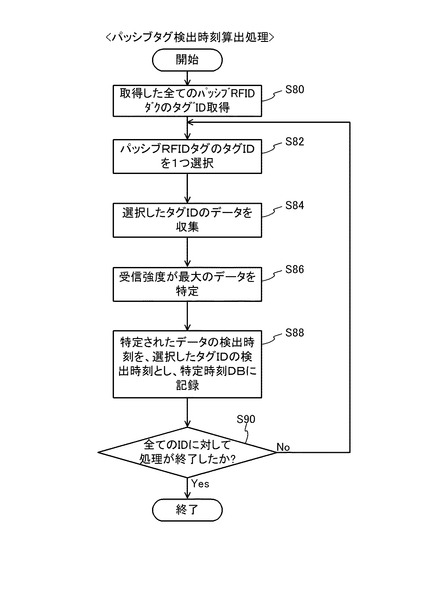
図14の処理では、まず、ステップS80において、時刻特定部40が、取得した全てのパッシブRFIDタグ22のダグIDを取得する。ここでは、時刻特定部40は、図8において取得された全てのタグIDを取得する。
【0057】
ステップS82では、時刻特定部40が、検出時刻毎のパッシブRFIDタグ22のダグIDを1つ選択する。一例として、時刻特定部40は、タグID「00000001」を選択したものとする。
【0058】
次いで、ステップS84では、時刻特定部40が、選択したタグID「00000001」のデータを、図8の取得結果から収集する。具体的には、時刻特定部40は、図9において(α)で示す範囲のデータを取得する。
【0059】
次いで、ステップS86では、時刻特定部40が、取得したデータの中で、受信強度が最大のデータを特定する。図9の(α)で示す範囲の場合、検出時刻「00:00:00.000」のデータが特定される。
【0060】
次いで、ステップS88では、時刻特定部40が、特定されたデータの検出時刻を選択したタグIDの検出時刻とし、受信強度とともに特定時刻DB54(図10(a)参照)に格納する。
【0061】
次いで、ステップS90では、時刻特定部40が、全てのタグIDに対する処理が終了したか否かを判断する。ここでの判断が否定された場合には、ステップS82に戻る。そして、時刻特定部40は、他のタグIDについても上記と同様の処理を実行する。例えば、タグID「00000002」であれば、図9の(β)に示す範囲のデータが収集されるので、収集されたデータのうち受信強度が最大の時刻「00:00:00.400」が検出時刻となる。また、タグID「00000003」であれば、図9の(γ)に示す範囲のデータが収集されるので、収集されたデータのうち受信強度が最大の時刻「00:00:00.600」が検出時刻となる。
【0062】
その後、ステップS90の判断が肯定された段階で、図14の全処理が終了する。図14の処理が終了した段階では、図10(a)に示すように、全タグIDの検出時刻と受信強度が、特定時刻DB54に格納されることになる。
【0063】
<パッシブタグ位置情報算出処理>
次に、図15に基づいて、生成部42によるパッシブタグ位置情報算出処理について、詳細に説明する。図15の処理においては、図12、図13の処理により生成された時刻毎位置DB52(図10(b))と、図14の処理により生成された特定時刻DB54(図10(a))とを用いた処理が行われる。
【0064】
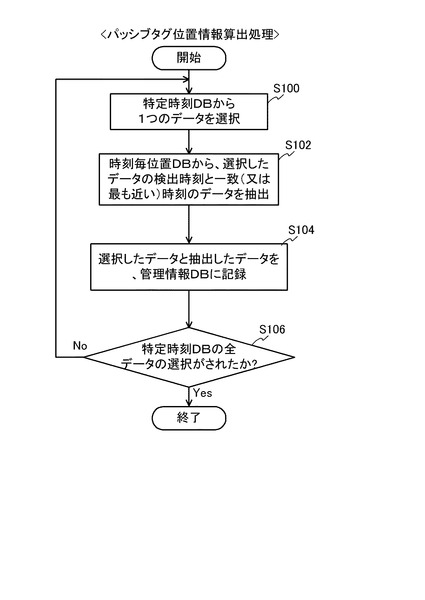
図15の処理では、まず、ステップS100において、生成部42が、特定時刻DB54から1つのデータを選択する。ここでは、例えば、図10(a)のタグID「00000001」のデータが選択されたものとする。
【0065】
次いで、ステップS102では、生成部42が、時刻毎位置DB52から、選択したデータの検出時刻と一致(又は最も近い)時刻のデータを抽出する。この場合、図10(b)の時刻「00:00:00.000」のデータが抽出される。
【0066】
次いで、ステップS104では、生成部42が、選択したデータと抽出したデータを、管理情報DB56に記録する。上記例では、図10(c)に示す、検出時刻「00:00:00.000」、タグID「00000001」、受信強度「90」、位置(エリア)「A1」のデータが、管理情報DB56に記録される。
【0067】
次いで、ステップS106では、生成部42が、特定時刻DB54の全データの選択がされたか否かを判断する。ここでの判断が否定された場合には、ステップS100に戻り、生成部42は、特定時刻DB54の次のデータの選択を行う。例えば、生成部42は、図10(a)のタグID「00000002」のデータを選択する。この場合、以降のステップS102、S104を経ることで、図10(c)に示す検出時刻「00:00:00.400」、タグID「00000002」、受信強度「80」、位置(エリア)「A4」のデータが、管理情報DB56に記録されることになる。
【0068】
その後、特定時刻DB54の各データに対するステップS102、S104の処理が繰返し行われる。そして、特定時刻DB54の全データに対する処理が終了し、ステップS106の判断が肯定されると、図15の全処理を終了する。
【0069】
図15の処理が終了すると、図10(c)に示す管理情報DB56の自動生成が完了する。この管理情報DB56は、パッシブRFIDタグ22が設けられた物品70の情報(タグID)と位置とを管理している。したがって、管理情報DB56は、倉庫200内の物品70の棚卸情報であるということができる。なお、管理情報DB56には、タグIDのほか、タグIDと関連付けられた物品の情報(名称、型番、種類など)が格納されてもよい。
【0070】
以上、詳細に説明したように、本実施形態によると、倉庫200内の物品70の周辺を移動する移動体60に、アクティブRFIDタグ24と、パッシブRFIDリーダ14が設けられ、倉庫200内にアクティブRFIDタグ24の無線信号を受信する複数のアクティブRFIDリーダ121〜124が設けられている。そして、物品70を管理する情報を生成する管理装置10は、エリア情報DB50を参照し、アクティブRFIDリーダ121〜124それぞれで受信される無線信号の信号強度に基づいて、移動体60の時刻毎の位置を検出する検出部36と、タグIDがパッシブRFIDリーダ14により読み取られた時刻を特定する時刻特定部40と、時刻特定部40の特定結果と、検出部36の検出結果との関係から、タグIDの取得位置(エリア)を含む物品70を管理する情報(管理情報DB56)を生成する生成部42と、を有している。このように、本実施形態では、検出部36による検出結果(移動体60の時刻毎の位置(エリア))と、時刻特定部40による特定結果(タグIDの取得時刻)とから、自動で、タグIDの読み取り位置(エリア)を求めることができ、ひいては物品70を管理する情報を生成することができる。また、本実施形態では、全物品70にパッシブRFIDタグ22を設けることとし、アクティブRFIDタグ24の使用数を極力減らすこととしているので、コストの増大を抑制し、効率よく、物品70を管理する情報を自動生成することが可能となる。
【0071】
また、本実施形態では、時刻特定部40は、パッシブRFIDリーダ14が同一のタグIDを複数時刻において検出した場合(図9の(α)〜(γ)参照)には、タグIDの取得精度(本実施形態では受信強度)に基づいて、タグIDの検出時刻を特定する。このため、本実施形態では、パッシブRFIDタグ22それぞれの個体差等の影響を受けずに、各タグIDの検出時刻を適切に特定することが可能である。
【0072】
また、本実施形態では、移動体60の加速度を検出する加速度センサ16を移動体60に設け、当該加速度センサ16の検出結果を補助的に用いて、移動体60の時刻毎の位置(エリア)を検出することとしている。これにより、アクティブRFIDリーダ121〜124を用いた位置検出では、移動体60の時刻毎の位置(エリア)が複数検出されるような場合でも、加速度センサ16の検出結果を用いることで、複数の位置のうち最も適切な位置を時刻毎位置DB52に記録することができる。
【0073】
なお、上記実施形態では、移動体60に加速度センサ16を設け、当該加速度センサ16の検出結果を、移動体60の時刻毎の位置(エリア)検出に用いる場合について説明したが、これに限られるものではない。例えば、加速度センサ16に代えて、又は加速度センサ16とともに、移動体60に気圧センサを設けることとしてもよい。気圧センサの検出値を用いることで、移動体60の高さ位置(Z位置)を検出することができるので、当該高さ位置を用いることで、上記実施形態と同様、適切な位置(エリア)を時刻毎位置DB52に記録することが可能となる。なお、アクティブRFIDリーダ14を用いた移動体60の位置検出精度が高く、時刻毎の移動体60の位置(エリア)が複数検出されないような場合には、加速度センサ16や気圧センサを用いないこととしても良い。また、上記実施形態では、アクティブRFIDタグ24と加速度センサ16を移動体60に設ける場合について説明したが、加速度センサを内蔵するアクティブタグを移動体60に設けることとしてもよい。
【0074】
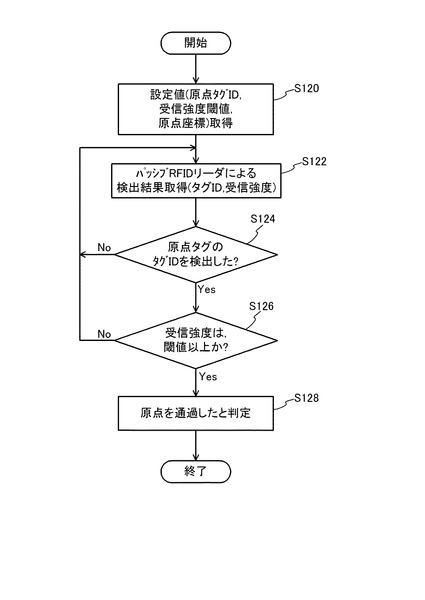
なお、上記実施形態では、図11のデータ取得処理において、作業者が開始入力及び終了入力を行う場合について説明したが、これに限られるものではない。図16に示すように、原点位置情報保持媒体としてのパッシブRFIDタグ(以下、「原点タグ」と呼ぶ)72を倉庫200の床面上に設置し、パッシブRFIDリーダ14による原点タグ72との通信状態に基づいてデータ取得処理の開始、終了を自動判定するようにしてもよい。この場合、図11の処理と並行して、図17のフローチャートに沿った処理を実行することで、データ取得処理の開始、終了の自動判定を行うことができる。なお、図17の処理の前提として、作業者は、図11のデータ取得処理を開始する場合又は終了する場合には、移動体60が原点タグ72の近傍に位置するように、移動体60を移動させるようにする。
【0075】
図17の処理では、まず、ステップS120において、第1受付部32(又は第2受付部34)が、設定値(原点タグ72のタグID、原点を判別するための受信強度の閾値Rx、原点座標)を取得する。なお、設定値は、作業者等により予め定められ、入力部95を介して管理装置10に入力されているものとする。
【0076】
次いで、ステップS122では、第1受付部32(又は第2受付部34)が、パッシブRFIDリーダ14による検出結果(パッシブRFIDタグ22又は原点タグ72からの電波の受信結果)を取得する。この場合の検出結果には、タグID及び受信強度が含まれる。
【0077】
次いで、ステップS124では、第1受付部32(又は第2受付部34)が、原点タグ72のタグIDを検出したか否かを判断する。ここでの判断が否定された場合には、ステップS122に戻る。一方、ステップS124の判断が肯定された場合には、ステップS126に移行する。
【0078】
ステップS126に移行した場合、第1受付部32(又は第2受付部34)は、原点タグ72から受信した電波の受信強度(R0とする)が閾値(Rx)以上であるか否かを判断する。ここでの判断が否定された場合には、まだ、移動体60が原点に達していないとして、ステップS122に移行する。一方、ステップS126の判断が肯定された場合には、ステップS128に移行する。
【0079】
ステップS128では、第1受付部32(又は第2受付部34)が、原点通過したと判定する。このように原点を通過したと判定した場合、第1受付部32(又は第2受付部34)は、図11のデータ取得処理の開始入力、又は終了入力と同等のものとして取り扱うものとする。このようにすることで、作業者等が開始入力や終了入力を行うことなく、図11の処理の開始、終了の制御を行うことができる。
【0080】
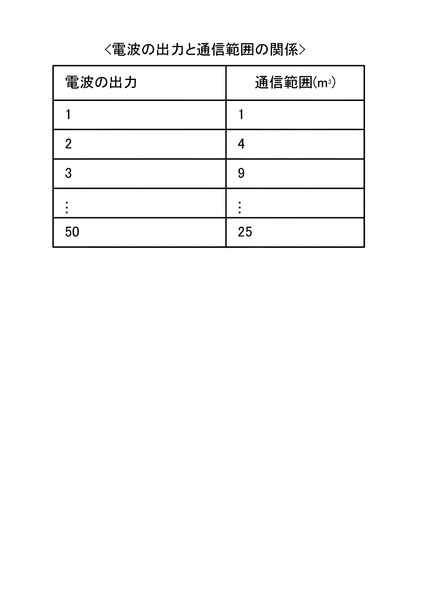
なお、上記実施形態では、図8に示すように、同時刻において複数のパッシブRFIDタグ22のタグIDが検出される場合について説明した。ただし、同時刻におけるタグIDの検出数は、少ないほうが好ましい。そこで、上記実施形態では、パッシブRFIDリーダ14においてタグIDの検出数が少なくなるように、パッシブRFIDリーダ14から出力する電波の強弱を調整することとしてもよい。この場合、以下のような調整を行うことができる。
【0081】
(a) 前提として、予めパッシブRFIDリーダ14の電波の出力Sと、通信範囲(体積)Vとの関係を計測し、図18のような表を作成しておく。
【0082】
(b) 次いで、パッシブRFIDリーダ14を一定の電波出力Soに設定し、移動体60を倉庫200内で移動させ、パッシブRFIDタグ22の検出を行う。また、同時に検出されるパッシブRFIDタグの個数の最小値(Cminとする)を求める。
【0083】
(c) 次いで、上記の検出結果(Cmin)と、(b)で用いたパッシブRFIDリーダ14の電波出力Soと、電波出力Soのときの通信範囲(体積)Vo(図18)から、1つのパッシブRFIDタグ22のみを検出できる通信範囲(m3/個)の最小値Dminを次式(10)より算出する。
Dmin=Cmin/Vo …(10)
【0084】
(d) 次いで、上記(c)で算出した1つのパッシブRFIDタグ22のみを検出できる通信範囲の最小値Dminと、図18とを比較し、Dmin以上で、かつDminに最も値が近似する通信範囲の電波出力を求める。そして、当該電波出力を、パッシブRFIDリーダ14の電波出力とする。例えば、Dminが7.5であった場合には、図18の通信範囲のうちDmin以上で、かつ最も値が近似する値(9m3)となる電波出力(3)をパッシブRFIDリーダ14の電波出力とする。
【0085】
このようにパッシブRFIDリーダ14の電波出力を決定することで、図11の処理中に、パッシブRFIDリーダ14が一度に検出するタグIDの個数を少なくすることができる。これにより、パッシブRFIDタグ22の検出時刻を高精度に求めることができ、ひいては、取得するパッシブRFIDタグ22の位置情報を高精度化することが可能となる。
【0086】
なお、上記実施形態では、識別情報(タグID)を保持する情報保持媒体がパッシブRFIDタグ22であり、当該情報保持媒体から識別情報を非接触で取得する取得装置がパッシブRFIDリーダ14である場合について説明した。しかしながら、これに限られるものではない。例えば、識別情報(タグID)を保持する情報保持媒体が、2次元コードが印刷された紙媒体であり、取得装置が、2次元コードを撮影するカメラであってもよい。この場合、同一の2次元コードが多数の位置で(多数の時刻で)撮影される場合がある(図9と同様)。このような場合には、2次元コードがカメラの撮像領域の中心に近い位置で撮影されている場合に、識別情報の取得精度が高いものとし、当該取得精度に基づいて、2次元コードの撮影時刻を決定するようにしてもよい。なお、2次元コードに代えて、カメレオンコードや、バーコードなどを用いることとしてもよい。
【0087】
なお、上記実施形態では、倉庫200内に物品管理システム100を設置する場合について説明したが、これに限られるものではない。倉庫以外の空間(室内、室外問わず)に、物品管理システム100を設置することとしてもよい。
【0088】
また、上記実施形態では、移動体60がラジコン飛行機やラジコンヘリコプター、ラジコン飛行船等である場合について説明したが、これに限られるものではない。例えば、移動体60は人が持ち歩くことが可能な物体であってもよい。また、移動体60は、レールやワイヤ等に沿って、X、Y2次元、又はX,Y,Z3次元方向に移動する物体であってもよい。また、移動体60は、人が乗車する自動車、カート、自転車等に取り付けられる物体であってもよい。
【0089】
なお、上記実施形態では、倉庫内にアクティブRFIDリーダを4つ設ける場合について説明したが、これに限られるものではない。アクティブRFIDリーダの数は、物品管理を行う空間の広さ等に応じて適宜変更すればよい。
【0090】
なお、上記の処理機能は、コンピュータによって実現することができる。その場合、処理装置が有すべき機能の処理内容を記述したプログラムが提供される。そのプログラムをコンピュータで実行することにより、上記処理機能がコンピュータ上で実現される。処理内容を記述したプログラムは、コンピュータで読み取り可能な記録媒体に記録しておくことができる。
【0091】
プログラムを流通させる場合には、例えば、そのプログラムが記録されたDVD(Digital Versatile Disc)、CD−ROM(Compact Disc Read Only Memory)などの可搬型記録媒体の形態で販売される。また、プログラムをサーバコンピュータの記憶装置に格納しておき、ネットワークを介して、サーバコンピュータから他のコンピュータにそのプログラムを転送することもできる。
【0092】
プログラムを実行するコンピュータは、例えば、可搬型記録媒体に記録されたプログラムもしくはサーバコンピュータから転送されたプログラムを、自己の記憶装置に格納する。そして、コンピュータは、自己の記憶装置からプログラムを読み取り、プログラムに従った処理を実行する。なお、コンピュータは、可搬型記録媒体から直接プログラムを読み取り、そのプログラムに従った処理を実行することもできる。また、コンピュータは、サーバコンピュータからプログラムが転送されるごとに、逐次、受け取ったプログラムに従った処理を実行することもできる。
【0093】
上述した実施形態は本発明の好適な実施の例である。但し、これに限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変形実施可能である。
【0094】
なお、以上の説明に関して更に以下の付記を開示する。
(付記1) 識別情報を保持する情報保持媒体が設けられた複数の物品の周辺を移動する移動体に設けられた、無線信号を発信するアクティブタグと、
前記移動体に設けられた、前記情報保持媒体から前記識別情報を非接触で取得する取得装置と、
前記移動体の移動範囲内又はその周辺に設けられ、前記アクティブタグの無線信号を受信する複数のアクティブタグ受信装置と、
前記複数の物品を管理する情報を生成する管理情報生成装置と、を備え、
前記管理情報生成装置は、
前記アクティブタグの位置ごとに、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部と、
前記格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出する検出部と、
前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定する時刻特定部と、
前記時刻特定部の特定結果と、前記検出部の検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する生成部と、
を有することを特徴とする物品管理システム。
(付記2) 前記時刻特定部は、前記取得装置が同一の識別情報を複数時刻において取得した場合には、前記複数時刻ごとの前記識別情報の取得精度に基づいて、前記複数時刻のうちのいずれかの時刻を前記識別情報が取得された時刻として特定することを特徴とする付記1に記載の物品管理システム。
(付記3) 前記情報保持媒体と前記取得装置は、パッシブタグとパッシブタグリーダであり、
前記時刻特定部は、前記パッシブタグリーダで前記識別情報が検出されたときの電波の受信強度が強いほど前記識別情報の取得精度が高いとして、前記複数時刻のうちのいずれかの時刻を前記識別情報が取得された時刻として特定することを特徴とする付記2に記載の物品管理システム。
(付記4) 前記移動体に設けられた、当該移動体自体又は当該移動体周辺の状態を検出する検出装置を更に備え、
前記検出部は、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度と、前記検出装置の検出結果とを用いて、前記移動体の時刻毎の位置を検出することを特徴とする付記1〜3のいずれかに記載の物品管理システム。
(付記5) 前記複数の物品の近傍に設けられた、原点位置の情報を保持する原点位置情報保持媒体を更に備え、
前記検出部は、前記取得装置が前記原点位置情報保持媒体から前記原点位置の情報を取得したときの前記移動体の位置を基準として、前記移動体の時刻毎の位置を検出することを特徴とする付記1〜4のいずれかに記載の物品管理システム。
(付記6) 無線信号を発信するアクティブタグと、識別情報を保持する情報保持媒体から前記識別情報を非接触で取得する取得装置と、を有する移動体を、前記情報保持媒体が設けられた複数の物品の周辺を移動させることで、前記複数の対象物品を管理する情報を生成する物品管理方法であって、
前記アクティブタグの位置ごとに、前記移動体の移動範囲内又はその周辺に設けられた複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出する検出工程と、
前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定する時刻特定工程と、
前記時刻特定工程の特定結果と、前記検出工程の検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する生成工程と、をコンピュータが実行することを特徴とする物品管理方法。
(付記7) 前記時刻特定工程では、前記取得装置が同一の識別情報を複数時刻において取得した場合には、前記複数時刻ごとの前記識別情報の取得精度に基づいて、前記複数時刻のうちのいずれかの時刻を前記識別情報が取得された時刻として特定することを特徴とする付記6に記載の物品管理方法。
(付記8) 前記情報保持媒体と前記取得装置は、パッシブタグとパッシブタグリーダであり、
前記時刻特定工程では、前記パッシブタグリーダで前記識別情報が検出されたときの電波の受信強度が強いほど前記識別情報の取得精度が高いとして、前記複数時刻のうちのいずれかの時刻を前記識別情報が取得された時刻として特定することを特徴とする付記7に記載の物品管理方法。
(付記9) 前記検出工程では、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度と、前記移動体自体又は当該移動体周辺の状態を検出する検出装置の検出結果とを用いて、前記移動体の時刻毎の位置を検出することを特徴とする付記6〜8のいずれかに記載の物品管理方法。
(付記10) 前記検出工程では、前記取得装置が、原点位置の情報を保持する原点位置情報保持媒体から前記原点位置の情報を取得したときの前記移動体の位置を基準として、前記移動体の時刻毎の位置を検出することを特徴とする付記6〜9のいずれかに記載の物品管理方法。
(付記11) 無線信号を発信するアクティブタグと、識別情報を保持する情報保持媒体から前記識別情報を非接触で取得する取得装置と、を有する移動体を、前記情報保持媒体が設けられた複数の物品の周辺を移動させ、当該移動中に取得される情報に基づいて前記複数の対象物品を管理する情報を生成する物品管理プログラムであって、
前記アクティブタグの位置ごとに、前記移動体の移動範囲内又はその周辺に設けられた複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出し、
前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定し、
前記特定結果と、前記検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する、処理をコンピュータに実行させることを特徴とする物品管理プログラム。
(付記12) 前記時刻を特定する処理では、前記取得装置が同一の識別情報を複数時刻において取得した場合には、前記複数時刻ごとの前記識別情報の取得精度に基づいて、前記複数時刻のうちのいずれかの時刻を前記識別情報が取得された時刻として特定することを特徴とする付記11に記載の物品管理プログラム。
(付記13) 前記情報保持媒体と前記取得装置は、パッシブタグとパッシブタグリーダであり、
前記時刻を特定する処理では、前記パッシブタグリーダで前記識別情報が検出されたときの電波の受信強度が強いほど前記識別情報の取得精度が高いとして、前記複数時刻のうちのいずれかの時刻を前記識別情報が取得された時刻として特定することを特徴とする付記12に記載の物品管理プログラム。
(付記14) 前記検出する処理では、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度と、前記移動体自体又は当該移動体周辺の状態を検出する検出装置の検出結果とを用いて、前記移動体の時刻毎の位置を検出することを特徴とする付記11〜13のいずれかに記載の物品管理プログラム。
(付記15) 前記検出する処理では、前記取得装置が、原点位置の情報を保持する原点位置情報保持媒体から前記原点位置の情報を取得したときの前記移動体の位置を基準として、前記移動体の時刻毎の位置を検出することを特徴とする付記11〜14のいずれかに記載の物品管理プログラム。
【符号の説明】
【0095】
10 管理装置(管理情報生成装置)
121〜124 アクティブRFIDリーダ(アクティブタグ受信装置)
14 パッシブRFIDリーダ(取得装置)
16 加速度センサ(検出装置)
22 パッシブRFIDタグ(情報保持媒体)
24 アクティブRFIDタグ(アクティブタグ)
36 検出部
40 時刻特定部
42 生成部
50 エリア情報DB(格納部)
60 移動体
70 物品
72 原点タグ(原点位置情報保持媒体)
100 物品管理システム
【技術分野】
【0001】
本件は、物品管理システム、物品管理方法及び物品管理プログラムに関する。
【背景技術】
【0002】
ICタグを利用して倉庫内等における物品の位置情報を管理する管理システムについては、従来から種々提案されている。
【0003】
例えば、パッシブRFIDタグやアクティブRFIDタグを管理対象の物品全てに設けることで、物品の管理を行う技術が存在している。また、特許文献1には、ICタグを用いた倉庫管理システムが開示されている。この特許文献1のシステムでは、ICタグの情報を読み取った装置(子機)が、読み取った情報をタグリーダ(親機)に転送するとともに、フロアに設置された装置(フロアタグ)に通知する。そして、フロアタグが、当該フロアタグの位置を特定する情報とともに、その位置から子機までの距離を特定する情報を、親機に送信することで、ICタグの3次元位置を検出する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−180008号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、パッシブRFIDタグを管理対象の物品全てに設ける場合、作業者は、パッシブRFIDタグリーダを備えるハンディターミナル等でタグを読み取るとともに、読み取った位置情報を手入力するなどする必要がある。一方、アクティブRFIDタグを管理対象の物品全てに設けることで、位置情報の入力等は不要になる。しかるに、アクティブRFIDタグはパッシブRFIDタグに比べて高価である。
【0006】
また、上記特許文献1に記載のシステムでは、子機と通信するフロアタグをエリア毎に設置する必要があるため、手間とコストがかかり効率が悪い。
【0007】
そこで本件は上記の課題に鑑みてなされたものであり、効率よく、物品を管理する情報を自動で生成することが可能な物品管理システム、物品管理方法及び物品管理プログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本明細書に記載の物品管理システムは、識別情報を保持する情報保持媒体が設けられた複数の物品の周辺を移動する移動体に設けられた、無線信号を発信するアクティブタグと、前記移動体に設けられた、前記情報保持媒体から前記識別情報を非接触で取得する取得装置と、前記移動体の移動範囲内又はその周辺に設けられ、前記アクティブタグの無線信号を受信する複数のアクティブタグ受信装置と、前記複数の物品を管理する情報を生成する管理情報生成装置と、を備え、前記管理情報生成装置は、前記アクティブタグの位置ごとに、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部と、前記格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出する検出部と、前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定する時刻特定部と、前記時刻特定部の特定結果と、前記検出部の検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する生成部と、を有している。
【0009】
本明細書に記載の物品管理方法は、無線信号を発信するアクティブタグと、識別情報を保持する情報保持媒体から前記識別情報を非接触で取得する取得装置と、を有する移動体を、前記情報保持媒体が設けられた複数の物品の周辺を移動させることで、前記複数の対象物品を管理する情報を生成する物品管理方法であって、前記アクティブタグの位置ごとに、前記移動体の移動範囲内又はその周辺に設けられた複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出する検出工程と、前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定する時刻特定工程と、前記時刻特定工程の特定結果と、前記検出工程の検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する生成工程と、をコンピュータが実行する物品管理方法である。
【0010】
本明細書に記載の物品管理プログラムは、無線信号を発信するアクティブタグと、識別情報を保持する情報保持媒体から前記識別情報を非接触で取得する取得装置と、を有する移動体を、前記情報保持媒体が設けられた複数の物品の周辺を移動させ、当該移動中に取得される情報に基づいて前記複数の対象物品を管理する情報を生成する物品管理プログラムであって、前記アクティブタグの位置ごとに、前記移動体の移動範囲内又はその周辺に設けられた複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出し、前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定し、前記特定結果と、前記検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する、処理をコンピュータに実行させる物品管理プログラムである。
【発明の効果】
【0011】
本明細書に記載の物品管理システム、物品管理方法及び物品管理プログラムは、効率よく、物品を管理する情報を自動で生成することができるという効果を奏する。
【図面の簡単な説明】
【0012】
【図1】一実施形態に係る物品管理システムが導入された倉庫内の状態を概略的に示す図である。
【図2】物品管理システムのブロック図である。
【図3】図2の管理装置のハードウェア構成図である。
【図4】管理装置の機能ブロック図である。
【図5】エリア情報DBを示す図である。
【図6】エリア情報DBにおけるエリアを説明するための図である。
【図7】時刻毎位置DBを示す図である。
【図8】第2受付部による取得結果の一例を示す図である。
【図9】時刻特定部による検出時刻の特定方法を説明するための図である。
【図10】図10(a)は、特定時刻DBを示す図であり、図10(b)は、時刻毎位置DBを示す図であり、図10(c)は、管理情報DBを示す図である。
【図11】データ取得処理を示すフローチャートである。
【図12】アクティブタグ位置情報算出処理を示すフローチャート(その1)である。
【図13】アクティブタグ位置情報算出処理を示すフローチャート(その2)である。
【図14】パッシブタグ検出時刻算出処理を示すフローチャートである。
【図15】パッシブタグ位置情報算出処理を示すフローチャートである。
【図16】変形例に係る原点タグを示す図である。
【図17】原点タグを用いた図11の処理の開始、終了を自動判定するための処理を示すフローチャートである。
【図18】変形例に係る電波の出力と通信範囲の関係を示す表である。
【発明を実施するための形態】
【0013】
以下、物品管理システムの一実施形態について、図1〜図15に基づいて詳細に説明する。図1には、一実施形態に係る物品管理システム100が導入された倉庫200内の状態が模式的に示されている。この図1に示すように、倉庫200内には、管理対象である多種多様な物品70が配列され、保管されているものとする。物品70それぞれには、識別情報保持媒体としてのパッシブRFIDタグ22が設けられているものとする。パッシブRFIDタグ22は、電池を内蔵しておらず、アクティブRFIDタグに比べて安価なタグである。
【0014】
物品管理システム100は、倉庫200内に設けられた複数(図1では4つ)のアクティブタグ受信装置としてのアクティブRFIDリーダ121、122、123、124と、倉庫200内を移動する移動体60に設けられたアクティブタグとしてのアクティブRFIDタグ24、取得装置としてのパッシブRFIDリーダ14及び検出装置としての加速度センサ16と、倉庫200内又は倉庫200近傍に設けられた無線LAN基地局18と、管理情報生成装置としての管理装置10(図2参照)と、を備える。物品管理システム100の各装置は、図2に示すLAN20に対して、直接的、又は間接的に(すなわち、無線LAN基地局18を介して)接続されている。
【0015】
ここで、移動体60は、例えば、ラジコン飛行機、ラジコンヘリコプター、ラジコン飛行船などであり、作業者の操作に応じて倉庫200内を自由に(XYZ3次元方向に)移動することが可能であるものとする。
【0016】
アクティブRFIDリーダ121〜124は、移動体60の移動範囲内又はその周辺に設けられている。これらアクティブRFIDリーダ121〜124は、移動体60に設けられたアクティブRFIDタグ24から発信される無線信号(電波)を受信し、当該受信強度(RSSI(Received Signal Strength Indication)値)を管理装置10に対して送信する。アクティブRFIDタグ24は、電池を内蔵しており、アクティブRFIDリーダ121〜124が受信可能な無線信号(電波)を発信する機能を有している。
【0017】
パッシブRFIDリーダ14は、電波を発し、パッシブRFIDタグ22において反射された一部の電波を受信する。パッシブRFIDタグ22において反射された電波には、パッシブRFIDタグ22が有する識別情報(「タグID」とも呼ぶ))が乗せられる。これにより、パッシブRFIDリーダ14では、パッシブRFIDタグ22が有するタグIDを非接触で読み取ることができるとともに、読み取ったときの電波の受信強度(RSSI値)を取得することができる。
【0018】
加速度センサ16は、移動体60のX,Y,Z方向に関する加速度を測定する。なお、パッシブRFIDリーダ14と加速度センサ16は、図1及び図2に示すように無線LAN基地局18に無線にて接続されている。これにより、パッシブRFIDリーダ14による読み取り結果(タグID)及び取得結果(受信強度)と、加速度センサ16による測定結果(加速度)は、無線LAN基地局18を介して、管理装置10に送信されるようになっている。
【0019】
管理装置10は、アクティブRFIDリーダ121〜124から送信されてくる無線信号の受信強度や、加速度センサ16の測定結果に基づいて、移動体60の時刻毎の位置を特定する。また、管理装置10は、パッシブRFIDリーダ14の取得結果(受信強度)に基づいて、タグIDそれぞれの読み取り時刻を特定する。そして、管理装置10は、移動体60の時刻毎の位置とタグIDそれぞれの読み取り時刻とに基づいて各物品70の位置情報を特定し、当該位置情報とタグIDとを、物品70を管理する情報として管理する。
【0020】
図3には、管理装置10のハードウェア構成が示されている。図3に示すように、管理装置10は、CPU90、ROM92、RAM94、記憶部(ここではHDD(Hard Disk Drive))96、表示部93、入力部95、及び可搬型記憶媒体用ドライブ99等を備えている。管理装置10の構成各部は、バス98に接続されている。表示部93は、液晶ディスプレイ等を含み、入力部95は、キーボード、マウス等を含んでいる。管理装置10では、ROM92あるいはHDD96に格納されているプログラム(物品管理プログラム)、或いは可搬型記憶媒体用ドライブ99が可搬型記憶媒体91から読み取ったプログラム(物品管理プログラム)をCPU90が実行することにより、図4の各部を実現する。
【0021】
図4には、管理装置10の機能ブロック図が示されている。図4に示すように、管理装置10では、CPU90が物品管理プログラムを実行することにより、第1受付部32、第2受付部34、検出部36、時刻特定部40、生成部42を実現する。なお、図4では、HDD96等に格納されている各種データベース(DB)についても図示している。
【0022】
第1受付部32は、アクティブRFIDリーダ121〜124において検出された無線信号(電波)の受信強度(RSSI値)、及び加速度センサ16による測定結果(加速度)を受付け、検出部36に対して送信する。
【0023】
第2受付部34は、パッシブRFIDリーダ14によるタグIDの読み取り結果及び受信強度(RSSI値)を、無線LAN基地局18を介して受付け、時刻特定部40に対して送信する。この場合、第2受付部34は、パッシブRFIDリーダ14が各パッシブRFIDタグ22から受信したタグIDと、タグIDを受信したときの電波の受信強度とを、所定時間間隔で取得するものとする。なお、図8には、第2受付部34の取得結果の一例が示されている。図8に示すように、第2受付部34では、同時刻において複数のパッシブRFIDタグ22のタグIDを受信するが、そのときの電波の受信強度は様々となっている。なお、電波の受信強度は、パッシブRFIDタグ22それぞれの個体差や、パッシブRFIDリーダ14との距離などにより変化する。
【0024】
検出部36は、格納部としてのエリア情報DB50を参照して、アクティブRFIDリーダ121〜124それぞれで受信される無線信号(電波)の受信強度(RSSI値)に基づいて、移動体60の時刻毎の位置を検出する。そして、検出部36は、当該検出結果を用いて、時刻毎位置DB52を更新する。なお、詳細については後述するが、検出部36は、移動体60の時刻毎の位置検出を行う際に、アクティブRFIDリーダ121〜124における受信強度のほか、加速度センサ16の測定結果(時刻毎の加速度)も考慮するものとする。
【0025】
ここで、エリア情報DB50は、図5に示すように、「エリア名」、「エリア中心座標(x,y,z)」、「アクティブRFIDリーダ121〜124の受信強度」の各フィールドを有している。「エリア名」のフィールドには、図6に示すように、倉庫200内の空間に設けられた立方体状の仮想的な領域の名称(A1,A2…Ai)が入力される。「エリア中心座標(x,y,z)」のフィールドには、各仮想的な領域(A1,A2…Ai)の中心座標が入力される。「アクティブRFIDリーダ121〜124の受信強度」のフィールドには、移動体60(アクティブRFIDタグ24)を各中心座標に位置決めしたときのアクティブRFIDリーダ121〜124における無線信号の受信強度が入力される。なお、エリア情報DB50の作成にあたっては、各中心座標に移動体60を人手等により順次位置決めし、各エリアにおけるアクティブRFIDリーダ121〜124それぞれにおける無線信号の受信強度を収集することとする。なお、エリア情報DB50の作成処理は、倉庫200内にアクティブRFIDリーダ121〜124を設置した後に行うこととすればよい。ただし、これに限らず、倉庫200とは別の場所に、倉庫200における設置条件と同一の条件となるようにアクティブRFIDリーダ121〜124を設置し、その状態で上記処理を行うことで、エリア情報DB50を作成するようにしても良い。
【0026】
図7には、時刻毎位置DB52が示されている。この時刻毎DB52は、時刻毎に移動体60(アクティブRFIDタグ24)が存在していた位置(エリア)を格納するデータベースである。
【0027】
図4に戻り、時刻特定部40は、第2受付部34による取得結果(図8)に基づいて、各タグIDの検出時刻(図9の太枠参照)を特定する。なお、各タグIDの検出時刻の具体的な取得方法については、後に詳述する。時刻特定部40は、特定した各タグIDの検出時刻を、タグID及び受信強度とともに、図10(a)に示す特定時刻DB54に格納する。
【0028】
生成部42は、図10(b)(図7と同様)の時刻毎位置DB52と図10(a)の特定時刻DB54とを用いて、タグIDの取得位置(エリア)を決定する。また、生成部42は、当該タグIDの取得位置(エリア)とタグIDとを含む情報を、物品の管理情報として、管理情報DB56(図10(c)参照)に格納する。なお、管理情報DB56は、図10(c)に示すように、「検出時刻」、「タグID」、「受信強度」、「位置(エリア)」のフィールドを有している。
【0029】
次に、物品管理システム100における処理について、詳細に説明する。以下においては、データ取得処理(図11)、アクティブタグ位置情報算出処理(図12、図13)、パッシブタグ検出時刻算出処理(図14)、パッシブタグ位置情報算出処理(図15)について、順を追って説明する。
【0030】
<データ取得処理>
まず、図11のフローチャートに沿って、データ取得処理について説明する。図11の処理では、まず、ステップS10において、第1受付部32及び第2受付部34が、設定値(データ取得間隔や、アクティブRFIDリーダの台数等)を取得する。この設定値は、入力部95等を介して、予め作業者等により管理装置10に入力されている値であるものとする。
【0031】
次いで、ステップS12では、第1受付部32が、開始入力されるまで待機する。ここで、作業者は、例えば、図6に示すように移動体60を倉庫200の床面上に静止させた状態(X,Y,Z方向の速度Vx、Vy、Vzが0の状態)で、管理装置10の入力部95から開始入力を行うものとする。そして、作業者は、開始入力を行った直後から、複数の物品70上方の空間における移動体60の移動を開始するものとする。なお、作業者は、図11の以降の処理が行われる間(作業者が終了入力をするまでの間)、移動体60が各物品70の上方を通過するように、移動体60を移動させるものとする。例えば、作業者は、移動体60のY軸方向及びZ軸方向の位置を変更しつつ、移動体60のX軸方向に沿った往復移動を繰り返し行うものとする。図11のステップS12では、作業者による開始入力がなされた段階で判断が肯定され、ステップS14に移行する。
【0032】
ステップS14に移行すると、第1受付部32は、アクティブRFIDリーダ121〜124の検出結果(受信強度)及び加速度センサ16の取得結果(加速度)を取得する。
【0033】
次いで、ステップS16では、第1受信部32が、全てのアクティブRFIDリーダ121〜124のデータを取得したか否かを判断する。ここでの判断が否定された場合には、ステップS16を再度繰り返すが、ここでの判断が肯定された場合には、ステップS18に移行する。
【0034】
ステップS18に移行すると、第2受付部34が、パッシブRFIDリーダ14の検出結果(タグID,受信強度)を取得する。
【0035】
次いで、ステップS20では、第1受付部32(又は第2受付部34)が、データ取得のための時間(データ取得間隔)が経過するまで待機する。そして、データ取得間隔が経過した段階で、ステップS22に移行し、第1受付部32(又は第2受付部34)は、終了入力されたか否かを判断する。この終了入力は、作業者が移動体60を倉庫200内において隈なく移動させた後に、管理装置10の入力部95から入力するものである。ステップS22の判断が否定された場合には、ステップS14に戻る。すなわち、終了入力があるまでは、ステップS14、S18の処理を、データ取得間隔毎に繰り返す。
【0036】
これにより、第1受付部32では、データ取得間隔毎に、アクティブRFIDリーダ121〜124の受信強度及び移動体60の加速度を取得することができる。また、第2受付部34では、データ取得間隔毎に、パッシブRFIDリーダ14が取得したタグID及び受信強度を取得することができる(図8)。なお、図8の「検出時刻」は、ステップS12において開始入力がされてから所定時間(例えばデータ取得間隔)が経過した後の時刻を「00:00:00.000」としている。ただし、これに限らず、時刻としては、倉庫100の存在する場所の標準時を用いることとしてもよい。
【0037】
その後、作業者により終了入力が行われると、図11の全処理を終了する。
【0038】
<アクティブタグ位置情報算出処理>
次に、図12、図13に基づいて、検出部36によるアクティブタグ位置情報算出処理について、詳細に説明する。この図12、図13の処理では、図11の処理で第1受付部32が取得したアクティブRFIDリーダ121〜124の受信強度及び移動体60の加速度を用いるものとする。
【0039】
図12、図13の処理では、まず、図12のステップS30において、検出部36が、データ取得時刻毎のアクティブRFIDリーダ121〜124の受信強度を取得する。ここでは、たとえば、検出部36は、時刻00:00:00.000におけるアクティブRFIDリーダ121〜124の受信強度を取得したものとする。次いで、ステップS32では、検出部36が、取得した受信強度(アクティブRFIDリーダ121〜124それぞれの受信強度をR1’、R2’、R3’、R4’とする)と、エリア情報DB50に格納されているあるエリアの受信強度(ここでは、エリア名「A1」の受信強度(R1(A1),R2(A1),R3(A1),R4(A1))とする)とを比較する。この比較では、検出部36は、次式(1)によりS(A1)を求めるものとする。
S(A1)=(|R1'-R1(A1)|)/R1(A1)+(|R2'-R2(A1)|)/R2(A1)
+(|R3'-R3(A1)|)/R3(A1)+(|R4'-R4(A1)|)/R4(A1) …(1)
ただし、例えば受信強度のいずれか(例えば、R1(A1))の値が0であった場合には、上式(1)の該当する項(例えば、(|R1'-R1(A1)|)/R1(A1))を0とするものとする。
【0040】
次いで、ステップS34では、検出部36が、エリア情報DB50の受信強度との比較が初回であるか否かを判断する。ここでの判断が肯定されると、ステップS36に移行する。ステップS36では、検出部36が、比較結果を最小値として、位置情報(エリア)(ここではエリアA1)を記録する。
【0041】
次いで、ステップS40では、検出部36が、比較結果が予め設定されている閾値以内か否かを判断する。ここで、比較結果(最小値)が閾値以内である場合とは、移動体60が比較に用いたエリア(ここではエリアA1)内に存在している可能性が高いことを意味する。ここでの判断が肯定された場合には、ステップS42に移行する。ステップS42では、検出部36が、閾値以内だったエリア(A1)を位置候補として記録する。そして、その後はステップS44に移行する。なお、ステップS40の判断が否定された場合には、ステップS42を経ずに、すなわち、エリア(A1)を位置候補とはせずに、ステップS44に移行する。
【0042】
ステップS44に移行すると、検出部36は、全てのエリアとの比較が終了したか否かを判断する。ここでの判断が否定された場合には、ステップS32に戻る。
【0043】
ステップS32に戻ると、検出部36は、ステップS30で取得したアクティブRFIDリーダ121〜124の受信強度と、エリア情報DB50の次のエリアの受信強度(例えばエリアA2の受信強度(R1(A2),R2(A2),R3(A2),R4(A2))との比較を行う。この比較では、検出部36は、次式(2)によりS(A2)を求めるものとする。
S(A2)=(|R1'-R1(A2)|)/R1(A2)+(|R2'-R2(A2)|)/R2(A2)
+(|R3'-R3(A2)|)/R3(A2)+(|R4'-R4(A2)|)/R4(A2) …(2)
ただし、例えば受信強度のいずれか(例えば、R1(A2))の値が0であった場合には、上式(2)の該当する項(例えば、(|R1'-R1(A2)|)/R1(A2))を0とするものとする。
【0044】
そして、ステップS34では、検出部36は、今回の比較が初回であるか否かを判断する。ここでは、2回目の比較であるので、判断が否定され、ステップS38に移行する。ステップS38では、現在の比較結果が、前回のステップS36で記録された最小値よりも小さいか否かを判断する。ここでの判断が否定された場合には、ステップS44に移行する。一方、ここでの判断が肯定された場合には、ステップS36に移行する。ステップS36では、検出部36が、比較結果を最小値として、位置情報(エリア)を記録する。そして、次のステップS40では、検出部36は、比較結果が閾値以内かを判断し、ここでの判断が肯定された場合には、ステップS42において、比較したエリア(A2)を位置候補として記録する。
【0045】
以降、ステップS44の判断が肯定されるまで、ステップS32〜S42の処理を繰り返す。すなわち、上記と同様、検出部36は、アクティブRFIDリーダ121〜124の受信強度と、エリア情報DB50の全てのエリアの受信強度との比較を、上式(1)、(2)と同様に実行するなどして、位置候補の記録(S42)を実行する。
【0046】
そして、全てのエリアとの比較が終了し、ステップS44の判断が肯定されると、ステップS46に移行する。ステップS46では、検出部36が、位置候補が2つ以上存在したか否か、すなわちステップS48を複数回経たか否かを判断する。ここでの判断が肯定された場合(位置候補が2つ以上存在した場合)には、図13のステップS48に移行する。なお、ステップS46の判断が否定された場合(位置候補が0又は1であった場合)には、図13のステップS68に移行する。ステップS68では、検出部36は、受信強度の比較結果(ステップS32の比較結果)が最小値であったエリアを、位置情報として時刻毎位置DB52(図7、図10(b))に記録する。その後は、ステップS70に移行する。
【0047】
一方、ステップS46の判断が肯定され、図13のステップS48に移行すると、検出部36は、時刻毎の加速度のデータを取得する。次いで、ステップS50では、検出部36が、加速度からの座標算出が初回であるか否かを判断する。ここでの判断が肯定された場合、すなわち初回である場合には、ステップS52に移行し、検出部36は、始点(設定値)座標を取得する。その後は、ステップS56に移行する。一方、ステップS50の判断が否定された場合、すなわち初回で無い場合には、ステップS54において、検出部36が、前回記録位置(エリア)の中心座標を取得する。その後は、ステップS56に移行する。なお、ステップS52又はS54で取得した始点座標又は前回記録エリアの中心座標を(Xl',Ym',Zn')と表すものとする。
【0048】
ステップS56に移行すると、検出部36は、加速度のデータと、始点座標又は前回記録エリアの中心座標と、に基づいて、以下の手順で、移動体60の位置座標を算出する。
【0049】
まず、検出部36は、X,Y,Z方向の加速度(Ax,Ay,Azとする)を用いて、X,Y,Z方向の速度を算出する。具体的には、速度(Vx、Vy、Vz)は次式(3)〜(5)にて算出することができる。なお、T2は、図11のステップS20におけるデータ取得間隔、Vx',Vy',Vz'は、前回速度とする。ただし、ステップS52を経た場合(始点座標を利用する場合)には、Vx'=Vy'=Vz'=0であるものとする。
Vx=Vx'+Ax・T2 …(3)
Vy=Vy'+Ay・T2 …(4)
Vz=Vz'+Az・T2 …(5)
【0050】
次いで、検出部36は、始点座標又は前回記録エリアの中心座標(Xl',Ym',Zn')と上記速度(Vx,Vy,Vz)より、移動体60の位置座標(Xl”,Ym”,Zn”)を次式(6)〜(8)より算出する。以上により、ステップS56の処理を終了する。
Xl”=Xl'+Vx・T2 …(6)
Ym”=Ym'+Vy・T2 …(7)
Zn”=Zn'+Vz・T2 …(8)
【0051】
次いで、ステップS58では、検出部36が、上式(3)〜(8)から算出した座標と、位置候補となっている2つ以上のエリアの中心座標それぞれとを比較する。なお、この比較においては、次式(9)に基づいて、位置候補となっている各エリアごとにΔdを算出する。なお、(Xl,Ym、Zn)は、位置候補となっている各エリアの中心座標を意味するものとする。
Δd=(|Xl−Xl”|)+(|Ym−Ym”|)+(|Zn−Zn”|)
…(9)
【0052】
次いで、ステップS60では、検出部36が、位置候補となっているエリアごとに算出されたΔdを比較し、Δdが最も小さいエリアを抽出する。そして、検出部36は、Δdが最も小さいエリアを移動体60の位置情報(時刻「00:00:00.000」において移動体60が位置していたエリア)として、時刻毎位置DB52(図7、図10(b))に記録する。その後は、ステップS70に移行する。
【0053】
ステップS70では、検出部36が、終了入力がされた時刻までの比較が完了したか否かを判断する。ここでの判断が否定された場合には、図12のステップS30に戻る。これ以降は、図11の処理においてデータを取得した全ての時刻における移動体60の位置情報(エリア)を取得するまで、ステップS30〜S70の処理・判断を繰り返す。そして、ステップS70の判断が肯定された段階で、図12、図13の全処理を終了する。
【0054】
以上の処理を行うことで、図7(図10(b))に示すような時刻毎位置DB52が生成されることになる。
【0055】
<パッシブタグ検出時刻算出処理>
次に、図14に基づいて、時刻特定部40によるパッシブタグ検出時刻算出処理について、詳細に説明する。この図14の処理は、図11の処理で第2受付部34がデータ取得間隔毎に取得したタグID、及びパッシブRFIDリーダ14の受信強度を用いた処理である。
【0056】
図14の処理では、まず、ステップS80において、時刻特定部40が、取得した全てのパッシブRFIDタグ22のダグIDを取得する。ここでは、時刻特定部40は、図8において取得された全てのタグIDを取得する。
【0057】
ステップS82では、時刻特定部40が、検出時刻毎のパッシブRFIDタグ22のダグIDを1つ選択する。一例として、時刻特定部40は、タグID「00000001」を選択したものとする。
【0058】
次いで、ステップS84では、時刻特定部40が、選択したタグID「00000001」のデータを、図8の取得結果から収集する。具体的には、時刻特定部40は、図9において(α)で示す範囲のデータを取得する。
【0059】
次いで、ステップS86では、時刻特定部40が、取得したデータの中で、受信強度が最大のデータを特定する。図9の(α)で示す範囲の場合、検出時刻「00:00:00.000」のデータが特定される。
【0060】
次いで、ステップS88では、時刻特定部40が、特定されたデータの検出時刻を選択したタグIDの検出時刻とし、受信強度とともに特定時刻DB54(図10(a)参照)に格納する。
【0061】
次いで、ステップS90では、時刻特定部40が、全てのタグIDに対する処理が終了したか否かを判断する。ここでの判断が否定された場合には、ステップS82に戻る。そして、時刻特定部40は、他のタグIDについても上記と同様の処理を実行する。例えば、タグID「00000002」であれば、図9の(β)に示す範囲のデータが収集されるので、収集されたデータのうち受信強度が最大の時刻「00:00:00.400」が検出時刻となる。また、タグID「00000003」であれば、図9の(γ)に示す範囲のデータが収集されるので、収集されたデータのうち受信強度が最大の時刻「00:00:00.600」が検出時刻となる。
【0062】
その後、ステップS90の判断が肯定された段階で、図14の全処理が終了する。図14の処理が終了した段階では、図10(a)に示すように、全タグIDの検出時刻と受信強度が、特定時刻DB54に格納されることになる。
【0063】
<パッシブタグ位置情報算出処理>
次に、図15に基づいて、生成部42によるパッシブタグ位置情報算出処理について、詳細に説明する。図15の処理においては、図12、図13の処理により生成された時刻毎位置DB52(図10(b))と、図14の処理により生成された特定時刻DB54(図10(a))とを用いた処理が行われる。
【0064】
図15の処理では、まず、ステップS100において、生成部42が、特定時刻DB54から1つのデータを選択する。ここでは、例えば、図10(a)のタグID「00000001」のデータが選択されたものとする。
【0065】
次いで、ステップS102では、生成部42が、時刻毎位置DB52から、選択したデータの検出時刻と一致(又は最も近い)時刻のデータを抽出する。この場合、図10(b)の時刻「00:00:00.000」のデータが抽出される。
【0066】
次いで、ステップS104では、生成部42が、選択したデータと抽出したデータを、管理情報DB56に記録する。上記例では、図10(c)に示す、検出時刻「00:00:00.000」、タグID「00000001」、受信強度「90」、位置(エリア)「A1」のデータが、管理情報DB56に記録される。
【0067】
次いで、ステップS106では、生成部42が、特定時刻DB54の全データの選択がされたか否かを判断する。ここでの判断が否定された場合には、ステップS100に戻り、生成部42は、特定時刻DB54の次のデータの選択を行う。例えば、生成部42は、図10(a)のタグID「00000002」のデータを選択する。この場合、以降のステップS102、S104を経ることで、図10(c)に示す検出時刻「00:00:00.400」、タグID「00000002」、受信強度「80」、位置(エリア)「A4」のデータが、管理情報DB56に記録されることになる。
【0068】
その後、特定時刻DB54の各データに対するステップS102、S104の処理が繰返し行われる。そして、特定時刻DB54の全データに対する処理が終了し、ステップS106の判断が肯定されると、図15の全処理を終了する。
【0069】
図15の処理が終了すると、図10(c)に示す管理情報DB56の自動生成が完了する。この管理情報DB56は、パッシブRFIDタグ22が設けられた物品70の情報(タグID)と位置とを管理している。したがって、管理情報DB56は、倉庫200内の物品70の棚卸情報であるということができる。なお、管理情報DB56には、タグIDのほか、タグIDと関連付けられた物品の情報(名称、型番、種類など)が格納されてもよい。
【0070】
以上、詳細に説明したように、本実施形態によると、倉庫200内の物品70の周辺を移動する移動体60に、アクティブRFIDタグ24と、パッシブRFIDリーダ14が設けられ、倉庫200内にアクティブRFIDタグ24の無線信号を受信する複数のアクティブRFIDリーダ121〜124が設けられている。そして、物品70を管理する情報を生成する管理装置10は、エリア情報DB50を参照し、アクティブRFIDリーダ121〜124それぞれで受信される無線信号の信号強度に基づいて、移動体60の時刻毎の位置を検出する検出部36と、タグIDがパッシブRFIDリーダ14により読み取られた時刻を特定する時刻特定部40と、時刻特定部40の特定結果と、検出部36の検出結果との関係から、タグIDの取得位置(エリア)を含む物品70を管理する情報(管理情報DB56)を生成する生成部42と、を有している。このように、本実施形態では、検出部36による検出結果(移動体60の時刻毎の位置(エリア))と、時刻特定部40による特定結果(タグIDの取得時刻)とから、自動で、タグIDの読み取り位置(エリア)を求めることができ、ひいては物品70を管理する情報を生成することができる。また、本実施形態では、全物品70にパッシブRFIDタグ22を設けることとし、アクティブRFIDタグ24の使用数を極力減らすこととしているので、コストの増大を抑制し、効率よく、物品70を管理する情報を自動生成することが可能となる。
【0071】
また、本実施形態では、時刻特定部40は、パッシブRFIDリーダ14が同一のタグIDを複数時刻において検出した場合(図9の(α)〜(γ)参照)には、タグIDの取得精度(本実施形態では受信強度)に基づいて、タグIDの検出時刻を特定する。このため、本実施形態では、パッシブRFIDタグ22それぞれの個体差等の影響を受けずに、各タグIDの検出時刻を適切に特定することが可能である。
【0072】
また、本実施形態では、移動体60の加速度を検出する加速度センサ16を移動体60に設け、当該加速度センサ16の検出結果を補助的に用いて、移動体60の時刻毎の位置(エリア)を検出することとしている。これにより、アクティブRFIDリーダ121〜124を用いた位置検出では、移動体60の時刻毎の位置(エリア)が複数検出されるような場合でも、加速度センサ16の検出結果を用いることで、複数の位置のうち最も適切な位置を時刻毎位置DB52に記録することができる。
【0073】
なお、上記実施形態では、移動体60に加速度センサ16を設け、当該加速度センサ16の検出結果を、移動体60の時刻毎の位置(エリア)検出に用いる場合について説明したが、これに限られるものではない。例えば、加速度センサ16に代えて、又は加速度センサ16とともに、移動体60に気圧センサを設けることとしてもよい。気圧センサの検出値を用いることで、移動体60の高さ位置(Z位置)を検出することができるので、当該高さ位置を用いることで、上記実施形態と同様、適切な位置(エリア)を時刻毎位置DB52に記録することが可能となる。なお、アクティブRFIDリーダ14を用いた移動体60の位置検出精度が高く、時刻毎の移動体60の位置(エリア)が複数検出されないような場合には、加速度センサ16や気圧センサを用いないこととしても良い。また、上記実施形態では、アクティブRFIDタグ24と加速度センサ16を移動体60に設ける場合について説明したが、加速度センサを内蔵するアクティブタグを移動体60に設けることとしてもよい。
【0074】
なお、上記実施形態では、図11のデータ取得処理において、作業者が開始入力及び終了入力を行う場合について説明したが、これに限られるものではない。図16に示すように、原点位置情報保持媒体としてのパッシブRFIDタグ(以下、「原点タグ」と呼ぶ)72を倉庫200の床面上に設置し、パッシブRFIDリーダ14による原点タグ72との通信状態に基づいてデータ取得処理の開始、終了を自動判定するようにしてもよい。この場合、図11の処理と並行して、図17のフローチャートに沿った処理を実行することで、データ取得処理の開始、終了の自動判定を行うことができる。なお、図17の処理の前提として、作業者は、図11のデータ取得処理を開始する場合又は終了する場合には、移動体60が原点タグ72の近傍に位置するように、移動体60を移動させるようにする。
【0075】
図17の処理では、まず、ステップS120において、第1受付部32(又は第2受付部34)が、設定値(原点タグ72のタグID、原点を判別するための受信強度の閾値Rx、原点座標)を取得する。なお、設定値は、作業者等により予め定められ、入力部95を介して管理装置10に入力されているものとする。
【0076】
次いで、ステップS122では、第1受付部32(又は第2受付部34)が、パッシブRFIDリーダ14による検出結果(パッシブRFIDタグ22又は原点タグ72からの電波の受信結果)を取得する。この場合の検出結果には、タグID及び受信強度が含まれる。
【0077】
次いで、ステップS124では、第1受付部32(又は第2受付部34)が、原点タグ72のタグIDを検出したか否かを判断する。ここでの判断が否定された場合には、ステップS122に戻る。一方、ステップS124の判断が肯定された場合には、ステップS126に移行する。
【0078】
ステップS126に移行した場合、第1受付部32(又は第2受付部34)は、原点タグ72から受信した電波の受信強度(R0とする)が閾値(Rx)以上であるか否かを判断する。ここでの判断が否定された場合には、まだ、移動体60が原点に達していないとして、ステップS122に移行する。一方、ステップS126の判断が肯定された場合には、ステップS128に移行する。
【0079】
ステップS128では、第1受付部32(又は第2受付部34)が、原点通過したと判定する。このように原点を通過したと判定した場合、第1受付部32(又は第2受付部34)は、図11のデータ取得処理の開始入力、又は終了入力と同等のものとして取り扱うものとする。このようにすることで、作業者等が開始入力や終了入力を行うことなく、図11の処理の開始、終了の制御を行うことができる。
【0080】
なお、上記実施形態では、図8に示すように、同時刻において複数のパッシブRFIDタグ22のタグIDが検出される場合について説明した。ただし、同時刻におけるタグIDの検出数は、少ないほうが好ましい。そこで、上記実施形態では、パッシブRFIDリーダ14においてタグIDの検出数が少なくなるように、パッシブRFIDリーダ14から出力する電波の強弱を調整することとしてもよい。この場合、以下のような調整を行うことができる。
【0081】
(a) 前提として、予めパッシブRFIDリーダ14の電波の出力Sと、通信範囲(体積)Vとの関係を計測し、図18のような表を作成しておく。
【0082】
(b) 次いで、パッシブRFIDリーダ14を一定の電波出力Soに設定し、移動体60を倉庫200内で移動させ、パッシブRFIDタグ22の検出を行う。また、同時に検出されるパッシブRFIDタグの個数の最小値(Cminとする)を求める。
【0083】
(c) 次いで、上記の検出結果(Cmin)と、(b)で用いたパッシブRFIDリーダ14の電波出力Soと、電波出力Soのときの通信範囲(体積)Vo(図18)から、1つのパッシブRFIDタグ22のみを検出できる通信範囲(m3/個)の最小値Dminを次式(10)より算出する。
Dmin=Cmin/Vo …(10)
【0084】
(d) 次いで、上記(c)で算出した1つのパッシブRFIDタグ22のみを検出できる通信範囲の最小値Dminと、図18とを比較し、Dmin以上で、かつDminに最も値が近似する通信範囲の電波出力を求める。そして、当該電波出力を、パッシブRFIDリーダ14の電波出力とする。例えば、Dminが7.5であった場合には、図18の通信範囲のうちDmin以上で、かつ最も値が近似する値(9m3)となる電波出力(3)をパッシブRFIDリーダ14の電波出力とする。
【0085】
このようにパッシブRFIDリーダ14の電波出力を決定することで、図11の処理中に、パッシブRFIDリーダ14が一度に検出するタグIDの個数を少なくすることができる。これにより、パッシブRFIDタグ22の検出時刻を高精度に求めることができ、ひいては、取得するパッシブRFIDタグ22の位置情報を高精度化することが可能となる。
【0086】
なお、上記実施形態では、識別情報(タグID)を保持する情報保持媒体がパッシブRFIDタグ22であり、当該情報保持媒体から識別情報を非接触で取得する取得装置がパッシブRFIDリーダ14である場合について説明した。しかしながら、これに限られるものではない。例えば、識別情報(タグID)を保持する情報保持媒体が、2次元コードが印刷された紙媒体であり、取得装置が、2次元コードを撮影するカメラであってもよい。この場合、同一の2次元コードが多数の位置で(多数の時刻で)撮影される場合がある(図9と同様)。このような場合には、2次元コードがカメラの撮像領域の中心に近い位置で撮影されている場合に、識別情報の取得精度が高いものとし、当該取得精度に基づいて、2次元コードの撮影時刻を決定するようにしてもよい。なお、2次元コードに代えて、カメレオンコードや、バーコードなどを用いることとしてもよい。
【0087】
なお、上記実施形態では、倉庫200内に物品管理システム100を設置する場合について説明したが、これに限られるものではない。倉庫以外の空間(室内、室外問わず)に、物品管理システム100を設置することとしてもよい。
【0088】
また、上記実施形態では、移動体60がラジコン飛行機やラジコンヘリコプター、ラジコン飛行船等である場合について説明したが、これに限られるものではない。例えば、移動体60は人が持ち歩くことが可能な物体であってもよい。また、移動体60は、レールやワイヤ等に沿って、X、Y2次元、又はX,Y,Z3次元方向に移動する物体であってもよい。また、移動体60は、人が乗車する自動車、カート、自転車等に取り付けられる物体であってもよい。
【0089】
なお、上記実施形態では、倉庫内にアクティブRFIDリーダを4つ設ける場合について説明したが、これに限られるものではない。アクティブRFIDリーダの数は、物品管理を行う空間の広さ等に応じて適宜変更すればよい。
【0090】
なお、上記の処理機能は、コンピュータによって実現することができる。その場合、処理装置が有すべき機能の処理内容を記述したプログラムが提供される。そのプログラムをコンピュータで実行することにより、上記処理機能がコンピュータ上で実現される。処理内容を記述したプログラムは、コンピュータで読み取り可能な記録媒体に記録しておくことができる。
【0091】
プログラムを流通させる場合には、例えば、そのプログラムが記録されたDVD(Digital Versatile Disc)、CD−ROM(Compact Disc Read Only Memory)などの可搬型記録媒体の形態で販売される。また、プログラムをサーバコンピュータの記憶装置に格納しておき、ネットワークを介して、サーバコンピュータから他のコンピュータにそのプログラムを転送することもできる。
【0092】
プログラムを実行するコンピュータは、例えば、可搬型記録媒体に記録されたプログラムもしくはサーバコンピュータから転送されたプログラムを、自己の記憶装置に格納する。そして、コンピュータは、自己の記憶装置からプログラムを読み取り、プログラムに従った処理を実行する。なお、コンピュータは、可搬型記録媒体から直接プログラムを読み取り、そのプログラムに従った処理を実行することもできる。また、コンピュータは、サーバコンピュータからプログラムが転送されるごとに、逐次、受け取ったプログラムに従った処理を実行することもできる。
【0093】
上述した実施形態は本発明の好適な実施の例である。但し、これに限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変形実施可能である。
【0094】
なお、以上の説明に関して更に以下の付記を開示する。
(付記1) 識別情報を保持する情報保持媒体が設けられた複数の物品の周辺を移動する移動体に設けられた、無線信号を発信するアクティブタグと、
前記移動体に設けられた、前記情報保持媒体から前記識別情報を非接触で取得する取得装置と、
前記移動体の移動範囲内又はその周辺に設けられ、前記アクティブタグの無線信号を受信する複数のアクティブタグ受信装置と、
前記複数の物品を管理する情報を生成する管理情報生成装置と、を備え、
前記管理情報生成装置は、
前記アクティブタグの位置ごとに、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部と、
前記格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出する検出部と、
前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定する時刻特定部と、
前記時刻特定部の特定結果と、前記検出部の検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する生成部と、
を有することを特徴とする物品管理システム。
(付記2) 前記時刻特定部は、前記取得装置が同一の識別情報を複数時刻において取得した場合には、前記複数時刻ごとの前記識別情報の取得精度に基づいて、前記複数時刻のうちのいずれかの時刻を前記識別情報が取得された時刻として特定することを特徴とする付記1に記載の物品管理システム。
(付記3) 前記情報保持媒体と前記取得装置は、パッシブタグとパッシブタグリーダであり、
前記時刻特定部は、前記パッシブタグリーダで前記識別情報が検出されたときの電波の受信強度が強いほど前記識別情報の取得精度が高いとして、前記複数時刻のうちのいずれかの時刻を前記識別情報が取得された時刻として特定することを特徴とする付記2に記載の物品管理システム。
(付記4) 前記移動体に設けられた、当該移動体自体又は当該移動体周辺の状態を検出する検出装置を更に備え、
前記検出部は、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度と、前記検出装置の検出結果とを用いて、前記移動体の時刻毎の位置を検出することを特徴とする付記1〜3のいずれかに記載の物品管理システム。
(付記5) 前記複数の物品の近傍に設けられた、原点位置の情報を保持する原点位置情報保持媒体を更に備え、
前記検出部は、前記取得装置が前記原点位置情報保持媒体から前記原点位置の情報を取得したときの前記移動体の位置を基準として、前記移動体の時刻毎の位置を検出することを特徴とする付記1〜4のいずれかに記載の物品管理システム。
(付記6) 無線信号を発信するアクティブタグと、識別情報を保持する情報保持媒体から前記識別情報を非接触で取得する取得装置と、を有する移動体を、前記情報保持媒体が設けられた複数の物品の周辺を移動させることで、前記複数の対象物品を管理する情報を生成する物品管理方法であって、
前記アクティブタグの位置ごとに、前記移動体の移動範囲内又はその周辺に設けられた複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出する検出工程と、
前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定する時刻特定工程と、
前記時刻特定工程の特定結果と、前記検出工程の検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する生成工程と、をコンピュータが実行することを特徴とする物品管理方法。
(付記7) 前記時刻特定工程では、前記取得装置が同一の識別情報を複数時刻において取得した場合には、前記複数時刻ごとの前記識別情報の取得精度に基づいて、前記複数時刻のうちのいずれかの時刻を前記識別情報が取得された時刻として特定することを特徴とする付記6に記載の物品管理方法。
(付記8) 前記情報保持媒体と前記取得装置は、パッシブタグとパッシブタグリーダであり、
前記時刻特定工程では、前記パッシブタグリーダで前記識別情報が検出されたときの電波の受信強度が強いほど前記識別情報の取得精度が高いとして、前記複数時刻のうちのいずれかの時刻を前記識別情報が取得された時刻として特定することを特徴とする付記7に記載の物品管理方法。
(付記9) 前記検出工程では、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度と、前記移動体自体又は当該移動体周辺の状態を検出する検出装置の検出結果とを用いて、前記移動体の時刻毎の位置を検出することを特徴とする付記6〜8のいずれかに記載の物品管理方法。
(付記10) 前記検出工程では、前記取得装置が、原点位置の情報を保持する原点位置情報保持媒体から前記原点位置の情報を取得したときの前記移動体の位置を基準として、前記移動体の時刻毎の位置を検出することを特徴とする付記6〜9のいずれかに記載の物品管理方法。
(付記11) 無線信号を発信するアクティブタグと、識別情報を保持する情報保持媒体から前記識別情報を非接触で取得する取得装置と、を有する移動体を、前記情報保持媒体が設けられた複数の物品の周辺を移動させ、当該移動中に取得される情報に基づいて前記複数の対象物品を管理する情報を生成する物品管理プログラムであって、
前記アクティブタグの位置ごとに、前記移動体の移動範囲内又はその周辺に設けられた複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出し、
前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定し、
前記特定結果と、前記検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する、処理をコンピュータに実行させることを特徴とする物品管理プログラム。
(付記12) 前記時刻を特定する処理では、前記取得装置が同一の識別情報を複数時刻において取得した場合には、前記複数時刻ごとの前記識別情報の取得精度に基づいて、前記複数時刻のうちのいずれかの時刻を前記識別情報が取得された時刻として特定することを特徴とする付記11に記載の物品管理プログラム。
(付記13) 前記情報保持媒体と前記取得装置は、パッシブタグとパッシブタグリーダであり、
前記時刻を特定する処理では、前記パッシブタグリーダで前記識別情報が検出されたときの電波の受信強度が強いほど前記識別情報の取得精度が高いとして、前記複数時刻のうちのいずれかの時刻を前記識別情報が取得された時刻として特定することを特徴とする付記12に記載の物品管理プログラム。
(付記14) 前記検出する処理では、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度と、前記移動体自体又は当該移動体周辺の状態を検出する検出装置の検出結果とを用いて、前記移動体の時刻毎の位置を検出することを特徴とする付記11〜13のいずれかに記載の物品管理プログラム。
(付記15) 前記検出する処理では、前記取得装置が、原点位置の情報を保持する原点位置情報保持媒体から前記原点位置の情報を取得したときの前記移動体の位置を基準として、前記移動体の時刻毎の位置を検出することを特徴とする付記11〜14のいずれかに記載の物品管理プログラム。
【符号の説明】
【0095】
10 管理装置(管理情報生成装置)
121〜124 アクティブRFIDリーダ(アクティブタグ受信装置)
14 パッシブRFIDリーダ(取得装置)
16 加速度センサ(検出装置)
22 パッシブRFIDタグ(情報保持媒体)
24 アクティブRFIDタグ(アクティブタグ)
36 検出部
40 時刻特定部
42 生成部
50 エリア情報DB(格納部)
60 移動体
70 物品
72 原点タグ(原点位置情報保持媒体)
100 物品管理システム
【特許請求の範囲】
【請求項1】
識別情報を保持する情報保持媒体が設けられた複数の物品の周辺を移動する移動体に設けられた、無線信号を発信するアクティブタグと、
前記移動体に設けられた、前記情報保持媒体から前記識別情報を非接触で取得する取得装置と、
前記移動体の移動範囲内又はその周辺に設けられ、前記アクティブタグの無線信号を受信する複数のアクティブタグ受信装置と、
前記複数の物品を管理する情報を生成する管理情報生成装置と、を備え、
前記管理情報生成装置は、
前記アクティブタグの位置ごとに、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部と、
前記格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出する検出部と、
前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定する時刻特定部と、
前記時刻特定部の特定結果と、前記検出部の検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する生成部と、
を有することを特徴とする物品管理システム。
【請求項2】
前記時刻特定部は、前記取得装置が同一の識別情報を複数時刻において取得した場合には、前記複数時刻ごとの前記識別情報の取得精度に基づいて、前記複数時刻のうちのいずれかの時刻を前記識別情報が取得された時刻として特定することを特徴とする請求項1に記載の物品管理システム。
【請求項3】
前記情報保持媒体と前記取得装置は、パッシブタグとパッシブタグリーダであり、
前記時刻特定部は、前記パッシブタグリーダで前記識別情報が検出されたときの電波の受信強度が強いほど前記識別情報の取得精度が高いとして、前記複数時刻のうちのいずれかの時刻を前記識別情報が取得された時刻として特定することを特徴とする請求項2に記載の物品管理システム。
【請求項4】
前記移動体に設けられた、当該移動体自体又は当該移動体周辺の状態を検出する検出装置を更に備え、
前記検出部は、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度と、前記検出装置の検出結果とを用いて、前記移動体の時刻毎の位置を検出することを特徴とする請求項1〜3のいずれか一項に記載の物品管理システム。
【請求項5】
前記複数の物品の近傍に設けられた、原点位置の情報を保持する原点位置情報保持媒体を更に備え、
前記検出部は、前記取得装置が前記原点位置情報保持媒体から前記原点位置の情報を取得したときの前記移動体の位置を基準として、前記移動体の時刻毎の位置を検出することを特徴とする請求項1〜4のいずれか一項に記載の物品管理システム。
【請求項6】
無線信号を発信するアクティブタグと、識別情報を保持する情報保持媒体から前記識別情報を非接触で取得する取得装置と、を有する移動体を、前記情報保持媒体が設けられた複数の物品の周辺を移動させることで、前記複数の対象物品を管理する情報を生成する物品管理方法であって、
前記アクティブタグの位置ごとに、前記移動体の移動範囲内又はその周辺に設けられた複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出する検出工程と、
前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定する時刻特定工程と、
前記時刻特定工程の特定結果と、前記検出工程の検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する生成工程と、をコンピュータが実行することを特徴とする物品管理方法。
【請求項7】
無線信号を発信するアクティブタグと、識別情報を保持する情報保持媒体から前記識別情報を非接触で取得する取得装置と、を有する移動体を、前記情報保持媒体が設けられた複数の物品の周辺を移動させ、当該移動中に取得される情報に基づいて前記複数の対象物品を管理する情報を生成する物品管理プログラムであって、
前記アクティブタグの位置ごとに、前記移動体の移動範囲内又はその周辺に設けられた複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出し、
前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定し、
前記特定結果と、前記検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する、処理をコンピュータに実行させることを特徴とする物品管理プログラム。
【請求項1】
識別情報を保持する情報保持媒体が設けられた複数の物品の周辺を移動する移動体に設けられた、無線信号を発信するアクティブタグと、
前記移動体に設けられた、前記情報保持媒体から前記識別情報を非接触で取得する取得装置と、
前記移動体の移動範囲内又はその周辺に設けられ、前記アクティブタグの無線信号を受信する複数のアクティブタグ受信装置と、
前記複数の物品を管理する情報を生成する管理情報生成装置と、を備え、
前記管理情報生成装置は、
前記アクティブタグの位置ごとに、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部と、
前記格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出する検出部と、
前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定する時刻特定部と、
前記時刻特定部の特定結果と、前記検出部の検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する生成部と、
を有することを特徴とする物品管理システム。
【請求項2】
前記時刻特定部は、前記取得装置が同一の識別情報を複数時刻において取得した場合には、前記複数時刻ごとの前記識別情報の取得精度に基づいて、前記複数時刻のうちのいずれかの時刻を前記識別情報が取得された時刻として特定することを特徴とする請求項1に記載の物品管理システム。
【請求項3】
前記情報保持媒体と前記取得装置は、パッシブタグとパッシブタグリーダであり、
前記時刻特定部は、前記パッシブタグリーダで前記識別情報が検出されたときの電波の受信強度が強いほど前記識別情報の取得精度が高いとして、前記複数時刻のうちのいずれかの時刻を前記識別情報が取得された時刻として特定することを特徴とする請求項2に記載の物品管理システム。
【請求項4】
前記移動体に設けられた、当該移動体自体又は当該移動体周辺の状態を検出する検出装置を更に備え、
前記検出部は、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度と、前記検出装置の検出結果とを用いて、前記移動体の時刻毎の位置を検出することを特徴とする請求項1〜3のいずれか一項に記載の物品管理システム。
【請求項5】
前記複数の物品の近傍に設けられた、原点位置の情報を保持する原点位置情報保持媒体を更に備え、
前記検出部は、前記取得装置が前記原点位置情報保持媒体から前記原点位置の情報を取得したときの前記移動体の位置を基準として、前記移動体の時刻毎の位置を検出することを特徴とする請求項1〜4のいずれか一項に記載の物品管理システム。
【請求項6】
無線信号を発信するアクティブタグと、識別情報を保持する情報保持媒体から前記識別情報を非接触で取得する取得装置と、を有する移動体を、前記情報保持媒体が設けられた複数の物品の周辺を移動させることで、前記複数の対象物品を管理する情報を生成する物品管理方法であって、
前記アクティブタグの位置ごとに、前記移動体の移動範囲内又はその周辺に設けられた複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出する検出工程と、
前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定する時刻特定工程と、
前記時刻特定工程の特定結果と、前記検出工程の検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する生成工程と、をコンピュータが実行することを特徴とする物品管理方法。
【請求項7】
無線信号を発信するアクティブタグと、識別情報を保持する情報保持媒体から前記識別情報を非接触で取得する取得装置と、を有する移動体を、前記情報保持媒体が設けられた複数の物品の周辺を移動させ、当該移動中に取得される情報に基づいて前記複数の対象物品を管理する情報を生成する物品管理プログラムであって、
前記アクティブタグの位置ごとに、前記移動体の移動範囲内又はその周辺に設けられた複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度を格納する格納部を参照し、前記複数のアクティブタグ受信装置それぞれで受信される無線信号の信号強度に基づいて、前記移動体の時刻毎の位置を検出し、
前記物品それぞれの識別情報が前記取得装置により取得された時刻を特定し、
前記特定結果と、前記検出結果との関係から、前記物品それぞれの識別情報の取得位置を決定し、当該決定結果を含む前記複数の物品を管理する情報を生成する、処理をコンピュータに実行させることを特徴とする物品管理プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2013−86912(P2013−86912A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−228214(P2011−228214)
【出願日】平成23年10月17日(2011.10.17)
【出願人】(000237156)株式会社富士通アドバンストエンジニアリング (100)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月17日(2011.10.17)
【出願人】(000237156)株式会社富士通アドバンストエンジニアリング (100)
【Fターム(参考)】
[ Back to top ]