
物標検出装置、物標検出方法およびプログラム
【課題】歩行者の位置を正確に検出することができる物標検出装置、物標検出方法およびプログラムを提供する。
【解決手段】車両の前方に向かって電波を送信する送信部11と、反射電波を受信する受信部12と、物標が歩行者であるか車両であるかを判定する情報処理を行うとともに、車両に対する物標の位置を演算して求める情報処理を行う情報処理部21と、情報処理部21における情報処理の内容が予め記憶された記憶部22と、が設けられている。記憶部22には、物標が歩行者である場合に行われる歩行者用情報処理の内容、及び、物標が車両である場合に行われる車両用情報処理の内容が予め記憶されている。情報処理部21は、物標が歩行者であると判定された場合には、記憶部22から取得した歩行者用情報処理の内容に基づいて情報処理を行い、物標が車両であると判定された場合には、記憶部22から取得した車両用情報処理の内容に基づいて情報処理を行う。
【解決手段】車両の前方に向かって電波を送信する送信部11と、反射電波を受信する受信部12と、物標が歩行者であるか車両であるかを判定する情報処理を行うとともに、車両に対する物標の位置を演算して求める情報処理を行う情報処理部21と、情報処理部21における情報処理の内容が予め記憶された記憶部22と、が設けられている。記憶部22には、物標が歩行者である場合に行われる歩行者用情報処理の内容、及び、物標が車両である場合に行われる車両用情報処理の内容が予め記憶されている。情報処理部21は、物標が歩行者であると判定された場合には、記憶部22から取得した歩行者用情報処理の内容に基づいて情報処理を行い、物標が車両であると判定された場合には、記憶部22から取得した車両用情報処理の内容に基づいて情報処理を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に用いられて好適な物標検出装置、物標検出方法およびプログラムに関する。
【背景技術】
【0002】
近年、車両を運転する際の運転者の負担を軽減する様々な運転支援技術や、車両の衝突が不可避な場合やそれに近い場合における衝突被害の軽減を図る技術が提案されている。例えば、76GHz帯の電波(以下、「ミリ波」と表記する。)を用いて車両前方に存在する物標を検出するレーダのような物標検出装置を利用した衝突回避システムや、衝突の被害を軽減するシステムも提案されている。
【0003】
上述の衝突回避システムや被害軽減システムの場合、システムを有効に機能させるには、車両前方に存在する物標の種類が判別されることが望ましい。つまり、レーダ等によって車両前方の物標の種類、例えば、車両なのか、人である歩行者なのか等の種類が判別できることが望ましい。
【0004】
しかしながら、ミリ波レーダを用いて物標を検出する場合には、物標の種類によって検出の難易度が変化するという問題があった。つまり、車両に代表されるような金属から構成された物標や、電波反射面積が大きな物標はミリ波の電波反射量が多いため、ミリ波レーダによる検出を行いやすい。その一方で、歩行者のような物標は、電波反射量が少ないため、車両等の物標と比較してミリ波レーダによる検出が難しい。
【0005】
このような問題を解決するために、ミリ波レーダから送信されるミリ波の出力(レーダ出力)を高めて、歩行者などの物標の検出を容易にする方法や、ミリ波レーダの他に赤外線カメラなどの検出装置を併用して歩行者などの物標の検出を行う方法が提案されている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−157765号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ここで、ミリ波レーダによって物標の位置を検出する場合、検出される物標の位置の精度、より具体的には車両から見て左右方向の横位置の精度が悪いことが一般的に知られている。つまり、ミリ波レーダを用いて車両のように横方向の長さが広い物標を検出した場合、物標の全体からミリ波が反射し、かつ、物標の各部分から反射したミリ波の強度が変動する。すると、当該物標に係る強度が最も強い反射ミリ波の位置も左右方向に移動することになる。
【0008】
このような場合に、例えば、反射したミリ波の強度が最も強い位置が物標の位置と判定するミリ波レーダを用いると、物標の実際の動きとは無関係に、反射ミリ波の強度変動に応じて検出される物標の位置が(物標の幅方向の大きさの範囲内で)左右方向に変動することになる。
【0009】
このような検出される物標の位置の変動を抑制するために、カットオフ周波数の低いフィルタ(ローパスフィルタ)を用いる方法が知られている。しかしながら、このようなフィルタを用いると、物標の位置が検出されるまでに要する時間が長くなるという問題があった。つまり、実際の物標の位置と、検出された物標の位置との差(誤差)が大きくなるという問題があった。
【0010】
例えば、歩行者が車道を横断しているのをミリ波レーダで検出した場合、歩行者は車道を横断し終えていても、ミリ波レーダでは歩行者が車道上にいるように検出される問う問題があった。
【0011】
また、レーダ出力を大きくする方法は、ミリ波を送信する機器等をレーダ出力に対応するものに変更する必要があり、対応が難しいという問題があった。特に、既に市場に流通しているミリ波レーダに対する適用は困難である。さらに、車両などに搭載されるミリ波レーダの出力は、電波法などの法令により上限が定められているため、レーダ出力を大きくする方法には、限度があるという問題があった。
【0012】
その一方で、赤外線カメラ等の映像による物標検出装置と、ミリ波レーダとを併用する方法では、赤外線カメラ等により取得された映像のうち、ミリ波レーダにより物標が検出された位置およびその周辺領域をスキャンすることにより、物標の位置を正確に検出されている。
【0013】
しかしながら、上述のようにミリ波レーダにより検出された物標の位置が、実際の物標の位置から離れていると、物標の位置を正確に検出できないという問題があった。つまり、検出された物標の位置と、実際の物標の位置とが離れていると、赤外線カメラ等により取得された映像における、検出された物標の位置およびその近傍領域と、実際に物標が映されている領域とが異なることになる。すると、検出された物標の位置およびその近傍領域をスキャンしても物標が映されていないため、映像に基づいて物標の位置を検出することができない。
【0014】
また、赤外線カメラ等により取得された映像の全面をスキャンして、物標の位置を検出する方法も考えられる。しかし、スキャンを行う領域が広くなることから、スキャンに係る情報処理量が膨大となり、物標の位置の検出に長い時間が必要となる。すると、検出された物標の位置と、実際の物標の位置とが大きく異なることになり、物標の位置を正確に検出できないという問題があった。
【0015】
本発明は、上記の課題を解決するためになされたものであって、歩行者の位置を正確に検出することができる物標検出装置、物標検出方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0016】
上記目的を達成するために、本発明は、以下の手段を提供する。
本発明の物標検出装置は、車両の前方に向かって電波を送信する送信部と、送信部から送信された電波のうち、車両の前方に存在する物標によって反射された電波である反射電波を受信する受信部と、物標が歩行者であるか車両であるかを判定する情報処理を行うとともに、受信部から出力された反射電波の受信信号に基づいて車両に対する物標の位置を演算して求める情報処理を行う情報処理部と、情報処理部における情報処理の内容が予め記憶された記憶部と、が設けられ、記憶部には、物標が歩行者である場合に情報処理部で行われる情報処理である歩行者用情報処理の内容、及び、物標が車両である場合に行われる情報処理である車両用情報処理の内容が予め記憶され、情報処理部は、物標が歩行者であると判定された場合には、記憶部から歩行者用情報処理の内容を取得し、取得した歩行者用情報処理の内容に基づいて情報処理を行い、物標が車両であると判定された場合には、記憶部から車両用情報処理の内容を取得し、取得した車両用情報処理の内容に基づいて情報処理を行うことを特徴とする。
【0017】
本発明の物標検出によれば、物標が歩行者であると判定された場合には、それ以後の情報処理は歩行者用情報処理の内容に基づいて行われる。そのため、歩行者の位置検出に適した内容の情報処理を行うことができる。その一方で、物標が車両であると判定された場合には、車両用情報処理の内容に基づいて情報処理が行われるため、車両の位置検出に支障をきたすことを抑制できる。
【0018】
上記発明においては、情報処理部は、物標の位置を演算により求める際に、受信信号に基づいて求めた前記物標の位置の変動を抑制するフィルタ処理である情報処理を行い、記憶部には、情報処理の内容として、歩行者用情報処理の際に用いられる歩行者用フィルタ処理の内容、及び、車両用情報処理の際に用いられる車両用フィルタ処理の内容が予め記憶されていることが望ましい。
【0019】
このように情報処理部におけるフィルタ処理において、物標が歩行者であると判定された場合には歩行者用フィルタ処理に変更することにより、物標検出装置により検出された歩行者の位置と、実際の歩行者の位置との間の誤差を縮めることができる。具体的には、車両用フィルタ処理と比較して、カットオフ周波数が高い歩行者用フィルタ処理、言い換えると、時間遅れが小さい歩行者用フィルタ処理に変更することで、物標検出装置が歩行者を検出して位置を算出するまでに要する時間が短縮される。そのため、移動し続ける歩行者の実際の位置と、物標検出装置により検出された歩行者の位置との間の誤差が縮まる。
【0020】
その一方で、物標が車両であると判定された場合には、情報処理部において車両用フィルタ処理が行われる。歩行者用フィルタ処理と比較して、車両用フィルタ処理はカットオフ周波数が低い。そのため、フィルタ処理として車両用フィルタ処理を行うことで、車両の幅方向の範囲内で、検出された車両の位置が頻繁に移動することが抑制される。
【0021】
上記発明においては、情報処理部は、反射電波の特性および所定の閾値を対比することにより、物標が歩行者か車両かを判定する情報処理を繰り返し行い、記憶部には、情報処理の内容として、直近の判定において物標が歩行者と判定された場合に用いられる歩行者用閾値、及び、直近の判定において物標が車両と判定された場合に用いられる車両用閾値が予め記憶されていることが望ましい。
【0022】
このように情報処理部における物標が歩行者か車両かの判定を行う情報処理において、物標が歩行者であると判定された場合には、上述の判定に用いる所定の閾値を歩行者用閾値に変更することにより、物標が歩行者であると安定して判定することができる。
【0023】
具体的には、歩行者から反射される反射電波は、歩行者の姿勢や動き、更には歩行者が身につけている物の向きや動き等の影響を受けやすい。そのため、情報処理部が一つの閾値に基づいて物標が歩行者か車両かの判定処理を行うと、物標が歩行者であっても、反射電波の状況によって歩行者と判定される場合もあれば、車両と判定される場合もあり、判定結果が安定しない。そこで、物標が歩行者であると判定された場合には、車両用閾値と比較して、物標を歩行者と判定しやすい歩行者用閾値に基づいて、物標が歩行者か車両かの判定処理を行うこととし、歩行者である物標が車両であると誤判定される可能性が低減される。
【0024】
本発明の物標検出方法は、車両の前方に向かって電波を送信し、車両の前方に存在する物標から反射された反射電波を受信する検出ステップと、物標が歩行者であるか否かを判定する情報処理を行う判定ステップと、受信した反射電波に基づいて、車両に対する物標の位置を演算して求める情報処理を行う位置算出ステップと、を有し、物標が歩行者である場合には、判定ステップ及び位置算出ステップの少なくとも一方における情報処理において、記憶部に予め記憶された歩行者用情報処理の内容を取得して、歩行者用情報処理の内容に基づいて情報処理が行われ、物標が車両である場合には、判定ステップ及び位置算出ステップの少なくとも一方における情報処理において、記憶部に予め記憶された車両用情報処理の内容を取得して、車両用情報処理の内容に基づいて情報処理が行われることを特徴とする。
【0025】
本発明のプログラムは、コンピュータに、車両の前方に向かって電波を送信し、車両の前方に存在する物標から反射された反射電波を受信する検出機能と、物標が歩行者であるか否かを判定する情報処理を行う判定機能と、受信した反射電波に基づいて、車両に対する物標の位置を演算して求める情報処理を行う位置算出機能と、を実現させるためのプログラムであって、物標が歩行者である場合には、判定機能及び位置算出機能の少なくとも一方における情報処理において、記憶部に予め記憶された歩行者用情報処理の内容を取得して、歩行者用情報処理の内容に基づいて情報処理が行われ、物標が車両である場合には、判定機能及び位置算出機能の少なくとも一方における情報処理において、記憶部に予め記憶された車両用情報処理の内容を取得して、車両用情報処理の内容に基づいて情報処理が行われることを特徴とする。
【0026】
本発明の物標検出方法およびプログラムによれば、物標が歩行者であると判定された場合には、それ以後の情報処理は歩行者用情報処理の内容に基づいて行われるため、歩行者の位置検出に適した内容の情報処理を行うことができる。その一方で、物標が車両であると判定された場合には、車両用情報処理の内容に基づいて情報処理が行われるため、車両の位置検出に支障をきたすことを抑制できる。
【発明の効果】
【0027】
本発明の物標検出装置、物標検出方法およびプログラムによれば、物標が歩行者であると判定された場合には、それ以後の情報処理は歩行者用情報処理の内容に基づいて行われる。そのため、歩行者の位置検出に適した内容の情報処理を行うことができ、歩行者の位置を正確に検出することができるという効果を奏する。
【図面の簡単な説明】
【0028】
【図1】本発明の一実施形態に係る物標検出装置の構成を説明するブロック図である。
【図2】図1の信号処理用マイコンにおける情報処理モードの切り替えを説明するフローチャートである。
【図3】図1の信号処理用マイコンにおける検出された物標が歩行者であるか車両であるかの判定処理を説明するフローチャートである。
【図4】強度閾値における規定の閾値および歩行者判定用の閾値の関係を説明するグラフである。
【発明を実施するための形態】
【0029】
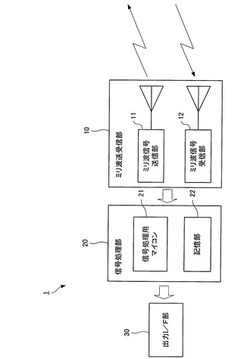
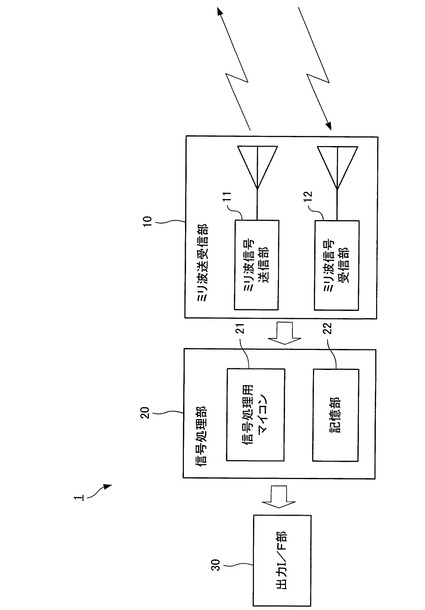
この発明の一実施形態に係る物標検出装置1について、図1から図4を参照して説明する。図1は、本実施形態に係る物標検出装置1の構成を説明するブロック図である。
本発明に係る物標検出装置1は、車両の前方に存在する物標を検出する物標検出装置であり、かつ、検出した物標が歩行者か車両かの判定も併せて行うものである。物標検出装置1によって検出された物標が歩行者であると判定された場合には、物標検出装置1から、車両の前方に歩行者が検出されたことを示す歩行者検出信号が出力される。
【0030】
物標検出装置1から出力された歩行者検出信号は、車両の運転者に歩行者の存在を知らせる警報部や、歩行者との距離に応じて車両の走行速度を制御または車両を停止させる自動走行制御部などに入力されるものである。
【0031】
物標検出装置1は、いわゆるミリ波を用いて車両の前方に存在する物標を検出するレーダを用いたミリ波センサである。本実施形態では、物標検出装置1が設けられた車両と物標との間の距離および相対速度をFM−CW(Frequency Modulation−Continuous Wave)方式で検出し、車両に対する物標が存在する方向(方位)をDBF(Digital Beam Forming)方式で検出する場合に適用して説明する。なお、車両と物標との間の距離および相対速度を検出する方式や、車両に対する物標が存在する方向を検出する方式は、上述の方式とは異なる他の方式であってもよく、特に限定するものではない。
【0032】
また、物標検出装置1は、上述のようにミリ波センサのみを用いて物標を検出し、物標が歩行者であるか車両であるかを判定するものであってもよいし、ミリ波センサの他にカメラなどの映像取得部および取得した映像を処理する映像処理部を備えて、これらを併用して物標の検出および物標が歩行者であるか車両であるかの判定を行ってもよく、特に限定するものではない。
【0033】
物標検出装置1には、図1に示すように、ミリ波送受信部10と、信号処理部20と、出力I/F部30と、が主に設けられている。
ミリ波送受信部10は、車両の前方にむけてミリ波(電波)を送信するとともに、前方に存在する物標に反射された反射ミリ波(反射電波)を受信するものである。ミリ波送受信部10には、ミリ波信号送信部(送信部)11と、ミリ波信号受信部(受信部)12とが主に設けられている。
【0034】
ミリ波信号送信部11はミリ波を送信するものであり、具体的には、周波数を時間の経過とともに変動(変調)させたミリ波を送信するものである。ミリ波信号送信部11の構成としては、公知の構成を用いることができ、特に限定するものではない。ミリ波の周波数は、縦軸を周波数、横軸を時間としたグラフで表した場合、右上がりの斜辺と右下がりの斜辺とが連続する形状を描くように変調される。
【0035】
ミリ波信号受信部12は物標により反射された反射ミリ波を受信して受信信号を出力するものであり、反射ミリ波の入射方向を検出するものである。本実施形態では、複数、例えば5つの並んだアンテナを備えたミリ波信号受信部12である例に適用して説明する。この場合、反射ミリ波がミリ波信号受信部12に入射する方位によって、5つのアンテナのそれぞれに到達する反射ミリ波の行路の長さが変わる。そのために発生した、それぞれのアンテナで検出された反射ミリ波の間の位相を検出することにより、反射ミリ波の入射方向を検出することができる。
【0036】
信号処理部20は、ミリ波信号受信部12からのミリ波の送信を制御するとともに、反射ミリ波を受信したミリ波信号受信部12から出力される受信信号を処理するものである。信号処理部20には、信号処理用マイコン(情報処理部、コンピュータ)21と、記憶部22と、が主に設けられている。
【0037】
信号処理用マイコン21は、信号の演算処理を行う電子回路であり、信号処理部20における各種制御に係る演算や、入力された受信信号の演算処理などを行うものである。
記憶部22は、RAM(Random Access Memory)やROM(Read Only Memory)などの半導体記憶装置であって、信号処理用マイコン21における演算処理に用いられるプログラムが記憶されるものである。更に記憶部22は、後述するように、物標が車両であると判定された場合など、信号処理用マイコン21における信号処理が車両検出モードに設定された場合に用いられる、物標の位置算出時のフィルタ処理において用いられる歩行者用フィルタ処理の内容、および、物標が歩行者か車両かの判定に用いられる歩行者用の各種の閾値が予め記憶されていると共に、物標が歩行者であると判定された場合など、信号処理用マイコン21における信号処理が歩行者検出モードに設定された場合に用いられる車両用フィルタ処理の内容、および、物標が歩行者か車両課の判定に用いられる車両用の各種の閾値が予め記憶されている。
【0038】
出力I/F部30は、信号処理部20において車両の前方に歩行者が検出された際、言い換えると、物標が歩行者であると判定された際に、信号処理部20から出力される歩行者検出信号を、物標検出装置1の外部に出力するインターフェースである。
【0039】
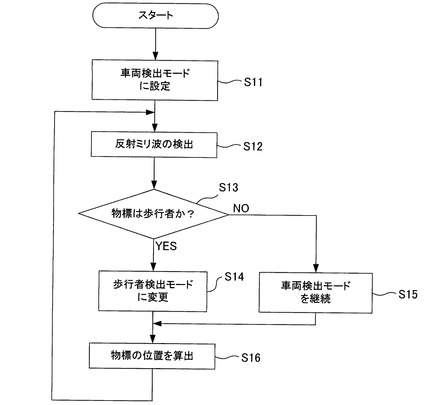
次に、上記の構成からなる物標検出装置1における歩行者の検出方法について説明する。図2は、図1の物標検出装置1の信号処理用マイコン21における情報処理モードの切り替えを説明するフローチャートである。図3は、図1の物標検出装置1の信号処理用マイコン21における検出された物標が歩行者であるか車両であるかの判定処理を説明するフローチャートである。
【0040】
まず、車両の電源状態がACC(アクセサリ)オンの状態になると、言い換えると、物標検出装置1に電力が供給されると、図2に示すように、信号処理用マイコン21における信号処理が車両検出モードに設定される(S11)。具体的には、信号処理用マイコン21は、記憶部22から予め記憶されている車両用フィルタ処理の内容や、車両用の各種の閾値を取得する。
【0041】
その後、信号処理用マイコン21からミリ波信号送信部11に向けて、ミリ波を送信させる制御信号が出力される。制御信号が入力されたミリ波信号送信部11からは、車両の前方に向けてミリ波が送信される。ミリ波は連続して送信されてもよいし、一定の間隔を空けて離散的に送信されてもよく、特に限定するものではない。
【0042】
車両の前方に物標が存在する場合、ミリ波信号送信部11から送信されたミリ波は物標において反射されて反射ミリ波となる。反射ミリ波は、物標から車両に向かって反射し、その一部がミリ波信号受信部12に受信される。言い換えると反射ミリ波がミリ波信号受信部12に検出される(S12:検出ステップ)。ミリ波信号受信部12は、5つのアンテナのそれぞれから受信した反射ミリ波の受信信号を出力する。
【0043】
ミリ波信号受信部12から出力された受信信号は、信号処理部20の信号処理用マイコン21に入力される。信号処理用マイコン21は入力された受信信号に基づいて、ミリ波を反射した物標が、歩行者であるか車両であるかの判定を行う(S13:判定ステップ)。
【0044】
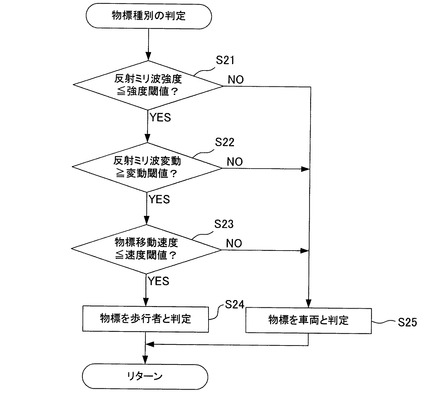
物標が歩行者であるか車両であるかの判定は、図3に示すように、反射ミリ波の強度に基づく判定(S21:判定ステップ)、反射ミリ波における強度の変動に基づく判定(S22:判定ステップ)、物標の移動速度に基づく判定(S23:判定ステップ)により行われる。
【0045】
S21の反射ミリ波の強度に基づく判定は以下の信号処理によって行われる。
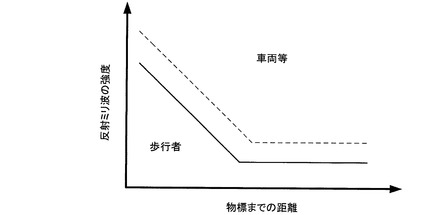
信号処理用マイコン21は、ミリ波信号受信部12により受信された反射ミリ波の強度の値が、S11において記憶部22から取得された車両用の強度閾値以下であるか否かの判定を行う。強度閾値は、反射ミリ波の強度における値の大小によってミリ波を反射した物標が歩行者か、車両か分ける境界を定める値である。強度閾値は、図4に示すように、車両と物標との間の距離が離れるに伴い値が減少し、ある距離以上に離れると略一定の値をとるものである。
【0046】
ここで、図4について説明する。図4は、強度閾値における規定の閾値および歩行者判定用の閾値の関係を説明するグラフである。
強度閾値を用いた判定の場合、反射ミリ波の強度の値が、強度閾値以下のであると物標が歩行者であると判定される。そのため、物標を歩行者と判定する確率を高めた歩行者判定用の強度閾値は、規定の強度閾値と比較して、その値が高くなる。図4では、規定の強度閾値を太線のグラフで示し、歩行者判定用の強度閾値を細点線のグラフで示している。
【0047】
信号処理用マイコン21は、S21の判定を行う際同時に、車両から物標までの距離を演算により求める。具体的には、信号処理用マイコン21は、ミリ波信号送信部11から送信されたミリ波と、ミリ波信号受信部12により受信された反射ミリ波との位相差を演算により求め、求められた位相差に基づいて、ミリ波を反射した物標と車両との間の距離を演算により求める。ミリ波と反射ミリ波との位相差に基づいて、物標と車両との間の距離を求める演算方法は、公知の演算方法を用いることができ、特に限定するものではない。
【0048】
信号処理用マイコン21は、上述の演算により求められた車両から物標までの距離および車両用の強度閾値に基づいて、測定された反射ミリ波の強度が、車両用の強度閾値以下であるか、車両用の強度閾値を超えるかの判定を行う。測定された反射ミリ波の強度が、車両用の強度閾値を超える場合(NOの場合)には、物標は車両であるの判定を行う(S25)。
【0049】
その一方で、測定された反射ミリ波の強度が、車両用の強度閾値以下の場合(YESの場合)には、信号処理用マイコン21は、反射ミリ波の強度における変動幅、言い換えると差分値が、車両用の変動閾値以上であるか否かの判定を行う(S22)。変動閾値は、記憶部22に予め記憶されているものであり、反射ミリ波の強度における差分値の大小によってミリ波を反射した物標が歩行者か、車両かに分ける境界を定める値である。歩行者用の変動閾値は、車両用の変動閾値と比較して、物標を歩行者と判定する確率が高くなる値、具体的には変動閾値が小さく設定されている。
【0050】
信号処理用マイコン21は、直近に受信された反射ミリ波の強度の値と、前回又は所定時間前に受信された反射ミリ波の強度の値との差分値を演算により求める。そして、演算により求められた差分値、言い換えると反射ミリ波変動と、取得した変動閾値との対比を行う。反射ミリ波変動が、車両用の変動閾値未満の場合(NOの場合)には、信号処理用マイコン21は、物標が車両であると判定する(S25)。
【0051】
その一方で反射ミリ波変動が、取得した変動閾値以上の場合(YESの場合)には、信号処理用マイコン21は、物標の移動速度が、車両用の速度閾値以下であるか否かの判定を行う(S23)。車両用の速度閾値および歩行者用の速度閾値は、記憶部22に予め記憶されているものであり、物標の移動速度によってミリ波を反射した物標が歩行者か、車両かに分ける境界を定める値である。歩行者用の速度閾値は、車両用の速度閾値と比較して、物標が歩行者であると判定される確率が高くなる値、具体的には速度閾値の値が高く設定されている。例えば、車両用の速度閾値または歩行者用の速度閾値としては、歩行者が全力で走った際の速度である12km/hから18km/h程度を例示することができる。
【0052】
速度閾値を取得した信号処理用マイコン21は、直近に送信されたミリ波と受信された反射ミリ波との間の位相差を算出し、算出された位相差に基づいて物標の移動速度を算出する。そして算出により求められた移動速度が、車両用の速度閾値を超えている場合(NOの場合)には、信号処理用マイコン21は、物標が車両であると判定する(S25)。その一方で、算出により求められた移動速度が、車両用の速度閾値以下の場合(YESの場合)には、信号処理用マイコン21は、物標が歩行者であると判定する(S24)。
【0053】
信号処理用マイコン21は物標が歩行者であると判定すると、信号処理用マイコン21における信号処理を歩行者検出モードに設定する処理を行う(S14)。具体的には、信号処理用マイコン21は、記憶部22から予め記憶されている歩行者用フィルタ処理の内容や、歩行者用の各種の閾値を取得する。そして信号処理用マイコン21における信号処理に用いられるフィルタ処理や各種の閾値を、取得した歩行者用フィルタ処理の内容や、歩行者用の各種の閾値に置き換える。その一方で、信号処理用マイコン21は物標が車両であると判定すると、信号処理用マイコン21における信号処理を車両検出モードとし続ける処理を行う(S15)。
【0054】
その後、信号処理用マイコン21は、車両に対する物標が存在する方向(方位)および車両から物標までの距離に基づいて、検出した物標の位置を算出する演算処理を行う(S16:位置算出ステップ)。具体的には、信号処理用マイコン21は、ミリ波信号受信部12から入力された5つのアンテナに係る受信信号の間の位相差を演算により求める。求められた位相差に基づいて、信号処理用マイコン21は反射ミリ波の入射方向、言い換えると、車両に対するミリ波を反射した物標の方位を演算により求める。
【0055】
さらに信号処理用マイコン21は、求められた位相差に基づいてミリ波を反射した物標と車両との間の距離を演算により求める。このようにして求められた物標が存在する方向、および、物標までの距離に基づいて、検出した物標の位置を算出する。
【0056】
検出した物標の位置を算出すると、信号処理用マイコン21は、算出された物標の位置に対してフィルタ処理の信号処理を行う。例えば、S13において物標が歩行者であると判定された場合には、S14において記憶部22から取得された歩行者用のフィルタ処理の内容に基づいて信号処理が行われる。逆に、S13において物標が車両であると判定された場合には、車両用のフィルタ処理の内容に基づいて信号処理が行われる。
【0057】
その後、信号処理用マイコン21は上述のS12に戻り、同様の信号処理を繰り返し行う。さらに、信号処理用マイコン21は物標が歩行者であると判定した際には、出力I/F部30を介して、物標検出装置1の外部に向けて歩行者検出信号や、車両に対する歩行者の位置の情報信号が出力される。
【0058】
上記の構成によれば、物標が歩行者であると判定された場合には、それ以後の信号処理用マイコン21における情報処理は記憶部22に予め記憶された歩行者モードに基づいて行われる。そのため、歩行者の位置検出に適した内容の情報処理を行うことができ、歩行者の位置を正確に検出することができる。その一方で、物標が車両であると判定された場合には、記憶部22に予め記憶された車両モードに基づいて情報処理が行われるため、車両の位置検出に支障をきたすことを抑制できる。
【0059】
信号処理用マイコン21におけるフィルタ処理において、物標が歩行者であると判定された場合には歩行者用フィルタ処理を行うことにより、物標検出装置1により検出された歩行者の位置と、実際の歩行者の位置との間の誤差を縮めることができる。具体的には、車両用フィルタ処理と比較して、カットオフ周波数が高い歩行者用フィルタ処理、言い換えると、時間遅れが小さい歩行者用フィルタ処理を行うことで、物標検出装置1が歩行者を検出して位置を算出するまでに要する時間が短縮される。そのため、移動し続ける歩行者の実際の位置と、物標検出装置により検出された歩行者の位置との間の誤差を縮めて、歩行者のより正確な位置を求めることができる。
【0060】
その一方で、物標が車両であると判定された場合には、信号処理用マイコン21において車両用フィルタ処理が行われる。歩行者用フィルタ処理と比較して、車両用フィルタ処理はカットオフ周波数が低いため、車両の幅方向の範囲内で、検出された車両の位置が頻繁に移動することを抑制することができる。
【0061】
信号処理用マイコン21における物標が歩行者か車両かの判定を行う情報処理において、物標が歩行者であると判定された場合には、S21からS23における判定に用いる各種の閾値として歩行者用の閾値を用いることにより、物標が歩行者であると安定して判定することができる。
【0062】
具体的には、歩行者から反射される反射電波は、歩行者の姿勢や動き、更には歩行者が身につけている物の向きや動き等の影響を受けやすい。そのため、信号処理用マイコン21が一つの閾値、例えば車用の閾値のみ、に基づいて物標が歩行者か車両かの判定処理を行うと、物標が歩行者であっても、反射電波の状況によって歩行者と判定される場合もあれば、車両と判定される場合もあり、判定結果が安定しない。そこで、物標が歩行者であると判定された場合には、車両用の各種の閾値と比較して、物標を歩行者と判定しやすい歩行者用の各種の閾値に基づいて、物標が歩行者か車両かの判定処理を行うことで、歩行者である物標が車両であると誤判定される可能性を低減することができる。
【0063】
なお、物標が歩行者であるか、車両であるかを判定する方法は、上述の実施形態のように物標におけるミリ波の反射特性に基づいて判定する方法でもよいし、カメラにより取得された車両前方の映像の解析結果に基づいて判定する方法でもよいし、カーナビゲーションなどに搭載されているロケータから取得される情報に基づいて判定する方法でもよく、特に限定するものではない。
【符号の説明】
【0064】
1…物標検出装置、11…ミリ波信号送信部(送信部)、12…ミリ波信号受信部(受信部)、21…信号処理用マイコン(情報処理部、コンピュータ)、22…記憶部、S12…検出ステップ、S13…判定ステップ、S21…判定ステップ、S22…判定ステップ、S23…判定ステップ
【技術分野】
【0001】
本発明は、車両に用いられて好適な物標検出装置、物標検出方法およびプログラムに関する。
【背景技術】
【0002】
近年、車両を運転する際の運転者の負担を軽減する様々な運転支援技術や、車両の衝突が不可避な場合やそれに近い場合における衝突被害の軽減を図る技術が提案されている。例えば、76GHz帯の電波(以下、「ミリ波」と表記する。)を用いて車両前方に存在する物標を検出するレーダのような物標検出装置を利用した衝突回避システムや、衝突の被害を軽減するシステムも提案されている。
【0003】
上述の衝突回避システムや被害軽減システムの場合、システムを有効に機能させるには、車両前方に存在する物標の種類が判別されることが望ましい。つまり、レーダ等によって車両前方の物標の種類、例えば、車両なのか、人である歩行者なのか等の種類が判別できることが望ましい。
【0004】
しかしながら、ミリ波レーダを用いて物標を検出する場合には、物標の種類によって検出の難易度が変化するという問題があった。つまり、車両に代表されるような金属から構成された物標や、電波反射面積が大きな物標はミリ波の電波反射量が多いため、ミリ波レーダによる検出を行いやすい。その一方で、歩行者のような物標は、電波反射量が少ないため、車両等の物標と比較してミリ波レーダによる検出が難しい。
【0005】
このような問題を解決するために、ミリ波レーダから送信されるミリ波の出力(レーダ出力)を高めて、歩行者などの物標の検出を容易にする方法や、ミリ波レーダの他に赤外線カメラなどの検出装置を併用して歩行者などの物標の検出を行う方法が提案されている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−157765号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ここで、ミリ波レーダによって物標の位置を検出する場合、検出される物標の位置の精度、より具体的には車両から見て左右方向の横位置の精度が悪いことが一般的に知られている。つまり、ミリ波レーダを用いて車両のように横方向の長さが広い物標を検出した場合、物標の全体からミリ波が反射し、かつ、物標の各部分から反射したミリ波の強度が変動する。すると、当該物標に係る強度が最も強い反射ミリ波の位置も左右方向に移動することになる。
【0008】
このような場合に、例えば、反射したミリ波の強度が最も強い位置が物標の位置と判定するミリ波レーダを用いると、物標の実際の動きとは無関係に、反射ミリ波の強度変動に応じて検出される物標の位置が(物標の幅方向の大きさの範囲内で)左右方向に変動することになる。
【0009】
このような検出される物標の位置の変動を抑制するために、カットオフ周波数の低いフィルタ(ローパスフィルタ)を用いる方法が知られている。しかしながら、このようなフィルタを用いると、物標の位置が検出されるまでに要する時間が長くなるという問題があった。つまり、実際の物標の位置と、検出された物標の位置との差(誤差)が大きくなるという問題があった。
【0010】
例えば、歩行者が車道を横断しているのをミリ波レーダで検出した場合、歩行者は車道を横断し終えていても、ミリ波レーダでは歩行者が車道上にいるように検出される問う問題があった。
【0011】
また、レーダ出力を大きくする方法は、ミリ波を送信する機器等をレーダ出力に対応するものに変更する必要があり、対応が難しいという問題があった。特に、既に市場に流通しているミリ波レーダに対する適用は困難である。さらに、車両などに搭載されるミリ波レーダの出力は、電波法などの法令により上限が定められているため、レーダ出力を大きくする方法には、限度があるという問題があった。
【0012】
その一方で、赤外線カメラ等の映像による物標検出装置と、ミリ波レーダとを併用する方法では、赤外線カメラ等により取得された映像のうち、ミリ波レーダにより物標が検出された位置およびその周辺領域をスキャンすることにより、物標の位置を正確に検出されている。
【0013】
しかしながら、上述のようにミリ波レーダにより検出された物標の位置が、実際の物標の位置から離れていると、物標の位置を正確に検出できないという問題があった。つまり、検出された物標の位置と、実際の物標の位置とが離れていると、赤外線カメラ等により取得された映像における、検出された物標の位置およびその近傍領域と、実際に物標が映されている領域とが異なることになる。すると、検出された物標の位置およびその近傍領域をスキャンしても物標が映されていないため、映像に基づいて物標の位置を検出することができない。
【0014】
また、赤外線カメラ等により取得された映像の全面をスキャンして、物標の位置を検出する方法も考えられる。しかし、スキャンを行う領域が広くなることから、スキャンに係る情報処理量が膨大となり、物標の位置の検出に長い時間が必要となる。すると、検出された物標の位置と、実際の物標の位置とが大きく異なることになり、物標の位置を正確に検出できないという問題があった。
【0015】
本発明は、上記の課題を解決するためになされたものであって、歩行者の位置を正確に検出することができる物標検出装置、物標検出方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0016】
上記目的を達成するために、本発明は、以下の手段を提供する。
本発明の物標検出装置は、車両の前方に向かって電波を送信する送信部と、送信部から送信された電波のうち、車両の前方に存在する物標によって反射された電波である反射電波を受信する受信部と、物標が歩行者であるか車両であるかを判定する情報処理を行うとともに、受信部から出力された反射電波の受信信号に基づいて車両に対する物標の位置を演算して求める情報処理を行う情報処理部と、情報処理部における情報処理の内容が予め記憶された記憶部と、が設けられ、記憶部には、物標が歩行者である場合に情報処理部で行われる情報処理である歩行者用情報処理の内容、及び、物標が車両である場合に行われる情報処理である車両用情報処理の内容が予め記憶され、情報処理部は、物標が歩行者であると判定された場合には、記憶部から歩行者用情報処理の内容を取得し、取得した歩行者用情報処理の内容に基づいて情報処理を行い、物標が車両であると判定された場合には、記憶部から車両用情報処理の内容を取得し、取得した車両用情報処理の内容に基づいて情報処理を行うことを特徴とする。
【0017】
本発明の物標検出によれば、物標が歩行者であると判定された場合には、それ以後の情報処理は歩行者用情報処理の内容に基づいて行われる。そのため、歩行者の位置検出に適した内容の情報処理を行うことができる。その一方で、物標が車両であると判定された場合には、車両用情報処理の内容に基づいて情報処理が行われるため、車両の位置検出に支障をきたすことを抑制できる。
【0018】
上記発明においては、情報処理部は、物標の位置を演算により求める際に、受信信号に基づいて求めた前記物標の位置の変動を抑制するフィルタ処理である情報処理を行い、記憶部には、情報処理の内容として、歩行者用情報処理の際に用いられる歩行者用フィルタ処理の内容、及び、車両用情報処理の際に用いられる車両用フィルタ処理の内容が予め記憶されていることが望ましい。
【0019】
このように情報処理部におけるフィルタ処理において、物標が歩行者であると判定された場合には歩行者用フィルタ処理に変更することにより、物標検出装置により検出された歩行者の位置と、実際の歩行者の位置との間の誤差を縮めることができる。具体的には、車両用フィルタ処理と比較して、カットオフ周波数が高い歩行者用フィルタ処理、言い換えると、時間遅れが小さい歩行者用フィルタ処理に変更することで、物標検出装置が歩行者を検出して位置を算出するまでに要する時間が短縮される。そのため、移動し続ける歩行者の実際の位置と、物標検出装置により検出された歩行者の位置との間の誤差が縮まる。
【0020】
その一方で、物標が車両であると判定された場合には、情報処理部において車両用フィルタ処理が行われる。歩行者用フィルタ処理と比較して、車両用フィルタ処理はカットオフ周波数が低い。そのため、フィルタ処理として車両用フィルタ処理を行うことで、車両の幅方向の範囲内で、検出された車両の位置が頻繁に移動することが抑制される。
【0021】
上記発明においては、情報処理部は、反射電波の特性および所定の閾値を対比することにより、物標が歩行者か車両かを判定する情報処理を繰り返し行い、記憶部には、情報処理の内容として、直近の判定において物標が歩行者と判定された場合に用いられる歩行者用閾値、及び、直近の判定において物標が車両と判定された場合に用いられる車両用閾値が予め記憶されていることが望ましい。
【0022】
このように情報処理部における物標が歩行者か車両かの判定を行う情報処理において、物標が歩行者であると判定された場合には、上述の判定に用いる所定の閾値を歩行者用閾値に変更することにより、物標が歩行者であると安定して判定することができる。
【0023】
具体的には、歩行者から反射される反射電波は、歩行者の姿勢や動き、更には歩行者が身につけている物の向きや動き等の影響を受けやすい。そのため、情報処理部が一つの閾値に基づいて物標が歩行者か車両かの判定処理を行うと、物標が歩行者であっても、反射電波の状況によって歩行者と判定される場合もあれば、車両と判定される場合もあり、判定結果が安定しない。そこで、物標が歩行者であると判定された場合には、車両用閾値と比較して、物標を歩行者と判定しやすい歩行者用閾値に基づいて、物標が歩行者か車両かの判定処理を行うこととし、歩行者である物標が車両であると誤判定される可能性が低減される。
【0024】
本発明の物標検出方法は、車両の前方に向かって電波を送信し、車両の前方に存在する物標から反射された反射電波を受信する検出ステップと、物標が歩行者であるか否かを判定する情報処理を行う判定ステップと、受信した反射電波に基づいて、車両に対する物標の位置を演算して求める情報処理を行う位置算出ステップと、を有し、物標が歩行者である場合には、判定ステップ及び位置算出ステップの少なくとも一方における情報処理において、記憶部に予め記憶された歩行者用情報処理の内容を取得して、歩行者用情報処理の内容に基づいて情報処理が行われ、物標が車両である場合には、判定ステップ及び位置算出ステップの少なくとも一方における情報処理において、記憶部に予め記憶された車両用情報処理の内容を取得して、車両用情報処理の内容に基づいて情報処理が行われることを特徴とする。
【0025】
本発明のプログラムは、コンピュータに、車両の前方に向かって電波を送信し、車両の前方に存在する物標から反射された反射電波を受信する検出機能と、物標が歩行者であるか否かを判定する情報処理を行う判定機能と、受信した反射電波に基づいて、車両に対する物標の位置を演算して求める情報処理を行う位置算出機能と、を実現させるためのプログラムであって、物標が歩行者である場合には、判定機能及び位置算出機能の少なくとも一方における情報処理において、記憶部に予め記憶された歩行者用情報処理の内容を取得して、歩行者用情報処理の内容に基づいて情報処理が行われ、物標が車両である場合には、判定機能及び位置算出機能の少なくとも一方における情報処理において、記憶部に予め記憶された車両用情報処理の内容を取得して、車両用情報処理の内容に基づいて情報処理が行われることを特徴とする。
【0026】
本発明の物標検出方法およびプログラムによれば、物標が歩行者であると判定された場合には、それ以後の情報処理は歩行者用情報処理の内容に基づいて行われるため、歩行者の位置検出に適した内容の情報処理を行うことができる。その一方で、物標が車両であると判定された場合には、車両用情報処理の内容に基づいて情報処理が行われるため、車両の位置検出に支障をきたすことを抑制できる。
【発明の効果】
【0027】
本発明の物標検出装置、物標検出方法およびプログラムによれば、物標が歩行者であると判定された場合には、それ以後の情報処理は歩行者用情報処理の内容に基づいて行われる。そのため、歩行者の位置検出に適した内容の情報処理を行うことができ、歩行者の位置を正確に検出することができるという効果を奏する。
【図面の簡単な説明】
【0028】
【図1】本発明の一実施形態に係る物標検出装置の構成を説明するブロック図である。
【図2】図1の信号処理用マイコンにおける情報処理モードの切り替えを説明するフローチャートである。
【図3】図1の信号処理用マイコンにおける検出された物標が歩行者であるか車両であるかの判定処理を説明するフローチャートである。
【図4】強度閾値における規定の閾値および歩行者判定用の閾値の関係を説明するグラフである。
【発明を実施するための形態】
【0029】
この発明の一実施形態に係る物標検出装置1について、図1から図4を参照して説明する。図1は、本実施形態に係る物標検出装置1の構成を説明するブロック図である。
本発明に係る物標検出装置1は、車両の前方に存在する物標を検出する物標検出装置であり、かつ、検出した物標が歩行者か車両かの判定も併せて行うものである。物標検出装置1によって検出された物標が歩行者であると判定された場合には、物標検出装置1から、車両の前方に歩行者が検出されたことを示す歩行者検出信号が出力される。
【0030】
物標検出装置1から出力された歩行者検出信号は、車両の運転者に歩行者の存在を知らせる警報部や、歩行者との距離に応じて車両の走行速度を制御または車両を停止させる自動走行制御部などに入力されるものである。
【0031】
物標検出装置1は、いわゆるミリ波を用いて車両の前方に存在する物標を検出するレーダを用いたミリ波センサである。本実施形態では、物標検出装置1が設けられた車両と物標との間の距離および相対速度をFM−CW(Frequency Modulation−Continuous Wave)方式で検出し、車両に対する物標が存在する方向(方位)をDBF(Digital Beam Forming)方式で検出する場合に適用して説明する。なお、車両と物標との間の距離および相対速度を検出する方式や、車両に対する物標が存在する方向を検出する方式は、上述の方式とは異なる他の方式であってもよく、特に限定するものではない。
【0032】
また、物標検出装置1は、上述のようにミリ波センサのみを用いて物標を検出し、物標が歩行者であるか車両であるかを判定するものであってもよいし、ミリ波センサの他にカメラなどの映像取得部および取得した映像を処理する映像処理部を備えて、これらを併用して物標の検出および物標が歩行者であるか車両であるかの判定を行ってもよく、特に限定するものではない。
【0033】
物標検出装置1には、図1に示すように、ミリ波送受信部10と、信号処理部20と、出力I/F部30と、が主に設けられている。
ミリ波送受信部10は、車両の前方にむけてミリ波(電波)を送信するとともに、前方に存在する物標に反射された反射ミリ波(反射電波)を受信するものである。ミリ波送受信部10には、ミリ波信号送信部(送信部)11と、ミリ波信号受信部(受信部)12とが主に設けられている。
【0034】
ミリ波信号送信部11はミリ波を送信するものであり、具体的には、周波数を時間の経過とともに変動(変調)させたミリ波を送信するものである。ミリ波信号送信部11の構成としては、公知の構成を用いることができ、特に限定するものではない。ミリ波の周波数は、縦軸を周波数、横軸を時間としたグラフで表した場合、右上がりの斜辺と右下がりの斜辺とが連続する形状を描くように変調される。
【0035】
ミリ波信号受信部12は物標により反射された反射ミリ波を受信して受信信号を出力するものであり、反射ミリ波の入射方向を検出するものである。本実施形態では、複数、例えば5つの並んだアンテナを備えたミリ波信号受信部12である例に適用して説明する。この場合、反射ミリ波がミリ波信号受信部12に入射する方位によって、5つのアンテナのそれぞれに到達する反射ミリ波の行路の長さが変わる。そのために発生した、それぞれのアンテナで検出された反射ミリ波の間の位相を検出することにより、反射ミリ波の入射方向を検出することができる。
【0036】
信号処理部20は、ミリ波信号受信部12からのミリ波の送信を制御するとともに、反射ミリ波を受信したミリ波信号受信部12から出力される受信信号を処理するものである。信号処理部20には、信号処理用マイコン(情報処理部、コンピュータ)21と、記憶部22と、が主に設けられている。
【0037】
信号処理用マイコン21は、信号の演算処理を行う電子回路であり、信号処理部20における各種制御に係る演算や、入力された受信信号の演算処理などを行うものである。
記憶部22は、RAM(Random Access Memory)やROM(Read Only Memory)などの半導体記憶装置であって、信号処理用マイコン21における演算処理に用いられるプログラムが記憶されるものである。更に記憶部22は、後述するように、物標が車両であると判定された場合など、信号処理用マイコン21における信号処理が車両検出モードに設定された場合に用いられる、物標の位置算出時のフィルタ処理において用いられる歩行者用フィルタ処理の内容、および、物標が歩行者か車両かの判定に用いられる歩行者用の各種の閾値が予め記憶されていると共に、物標が歩行者であると判定された場合など、信号処理用マイコン21における信号処理が歩行者検出モードに設定された場合に用いられる車両用フィルタ処理の内容、および、物標が歩行者か車両課の判定に用いられる車両用の各種の閾値が予め記憶されている。
【0038】
出力I/F部30は、信号処理部20において車両の前方に歩行者が検出された際、言い換えると、物標が歩行者であると判定された際に、信号処理部20から出力される歩行者検出信号を、物標検出装置1の外部に出力するインターフェースである。
【0039】
次に、上記の構成からなる物標検出装置1における歩行者の検出方法について説明する。図2は、図1の物標検出装置1の信号処理用マイコン21における情報処理モードの切り替えを説明するフローチャートである。図3は、図1の物標検出装置1の信号処理用マイコン21における検出された物標が歩行者であるか車両であるかの判定処理を説明するフローチャートである。
【0040】
まず、車両の電源状態がACC(アクセサリ)オンの状態になると、言い換えると、物標検出装置1に電力が供給されると、図2に示すように、信号処理用マイコン21における信号処理が車両検出モードに設定される(S11)。具体的には、信号処理用マイコン21は、記憶部22から予め記憶されている車両用フィルタ処理の内容や、車両用の各種の閾値を取得する。
【0041】
その後、信号処理用マイコン21からミリ波信号送信部11に向けて、ミリ波を送信させる制御信号が出力される。制御信号が入力されたミリ波信号送信部11からは、車両の前方に向けてミリ波が送信される。ミリ波は連続して送信されてもよいし、一定の間隔を空けて離散的に送信されてもよく、特に限定するものではない。
【0042】
車両の前方に物標が存在する場合、ミリ波信号送信部11から送信されたミリ波は物標において反射されて反射ミリ波となる。反射ミリ波は、物標から車両に向かって反射し、その一部がミリ波信号受信部12に受信される。言い換えると反射ミリ波がミリ波信号受信部12に検出される(S12:検出ステップ)。ミリ波信号受信部12は、5つのアンテナのそれぞれから受信した反射ミリ波の受信信号を出力する。
【0043】
ミリ波信号受信部12から出力された受信信号は、信号処理部20の信号処理用マイコン21に入力される。信号処理用マイコン21は入力された受信信号に基づいて、ミリ波を反射した物標が、歩行者であるか車両であるかの判定を行う(S13:判定ステップ)。
【0044】
物標が歩行者であるか車両であるかの判定は、図3に示すように、反射ミリ波の強度に基づく判定(S21:判定ステップ)、反射ミリ波における強度の変動に基づく判定(S22:判定ステップ)、物標の移動速度に基づく判定(S23:判定ステップ)により行われる。
【0045】
S21の反射ミリ波の強度に基づく判定は以下の信号処理によって行われる。
信号処理用マイコン21は、ミリ波信号受信部12により受信された反射ミリ波の強度の値が、S11において記憶部22から取得された車両用の強度閾値以下であるか否かの判定を行う。強度閾値は、反射ミリ波の強度における値の大小によってミリ波を反射した物標が歩行者か、車両か分ける境界を定める値である。強度閾値は、図4に示すように、車両と物標との間の距離が離れるに伴い値が減少し、ある距離以上に離れると略一定の値をとるものである。
【0046】
ここで、図4について説明する。図4は、強度閾値における規定の閾値および歩行者判定用の閾値の関係を説明するグラフである。
強度閾値を用いた判定の場合、反射ミリ波の強度の値が、強度閾値以下のであると物標が歩行者であると判定される。そのため、物標を歩行者と判定する確率を高めた歩行者判定用の強度閾値は、規定の強度閾値と比較して、その値が高くなる。図4では、規定の強度閾値を太線のグラフで示し、歩行者判定用の強度閾値を細点線のグラフで示している。
【0047】
信号処理用マイコン21は、S21の判定を行う際同時に、車両から物標までの距離を演算により求める。具体的には、信号処理用マイコン21は、ミリ波信号送信部11から送信されたミリ波と、ミリ波信号受信部12により受信された反射ミリ波との位相差を演算により求め、求められた位相差に基づいて、ミリ波を反射した物標と車両との間の距離を演算により求める。ミリ波と反射ミリ波との位相差に基づいて、物標と車両との間の距離を求める演算方法は、公知の演算方法を用いることができ、特に限定するものではない。
【0048】
信号処理用マイコン21は、上述の演算により求められた車両から物標までの距離および車両用の強度閾値に基づいて、測定された反射ミリ波の強度が、車両用の強度閾値以下であるか、車両用の強度閾値を超えるかの判定を行う。測定された反射ミリ波の強度が、車両用の強度閾値を超える場合(NOの場合)には、物標は車両であるの判定を行う(S25)。
【0049】
その一方で、測定された反射ミリ波の強度が、車両用の強度閾値以下の場合(YESの場合)には、信号処理用マイコン21は、反射ミリ波の強度における変動幅、言い換えると差分値が、車両用の変動閾値以上であるか否かの判定を行う(S22)。変動閾値は、記憶部22に予め記憶されているものであり、反射ミリ波の強度における差分値の大小によってミリ波を反射した物標が歩行者か、車両かに分ける境界を定める値である。歩行者用の変動閾値は、車両用の変動閾値と比較して、物標を歩行者と判定する確率が高くなる値、具体的には変動閾値が小さく設定されている。
【0050】
信号処理用マイコン21は、直近に受信された反射ミリ波の強度の値と、前回又は所定時間前に受信された反射ミリ波の強度の値との差分値を演算により求める。そして、演算により求められた差分値、言い換えると反射ミリ波変動と、取得した変動閾値との対比を行う。反射ミリ波変動が、車両用の変動閾値未満の場合(NOの場合)には、信号処理用マイコン21は、物標が車両であると判定する(S25)。
【0051】
その一方で反射ミリ波変動が、取得した変動閾値以上の場合(YESの場合)には、信号処理用マイコン21は、物標の移動速度が、車両用の速度閾値以下であるか否かの判定を行う(S23)。車両用の速度閾値および歩行者用の速度閾値は、記憶部22に予め記憶されているものであり、物標の移動速度によってミリ波を反射した物標が歩行者か、車両かに分ける境界を定める値である。歩行者用の速度閾値は、車両用の速度閾値と比較して、物標が歩行者であると判定される確率が高くなる値、具体的には速度閾値の値が高く設定されている。例えば、車両用の速度閾値または歩行者用の速度閾値としては、歩行者が全力で走った際の速度である12km/hから18km/h程度を例示することができる。
【0052】
速度閾値を取得した信号処理用マイコン21は、直近に送信されたミリ波と受信された反射ミリ波との間の位相差を算出し、算出された位相差に基づいて物標の移動速度を算出する。そして算出により求められた移動速度が、車両用の速度閾値を超えている場合(NOの場合)には、信号処理用マイコン21は、物標が車両であると判定する(S25)。その一方で、算出により求められた移動速度が、車両用の速度閾値以下の場合(YESの場合)には、信号処理用マイコン21は、物標が歩行者であると判定する(S24)。
【0053】
信号処理用マイコン21は物標が歩行者であると判定すると、信号処理用マイコン21における信号処理を歩行者検出モードに設定する処理を行う(S14)。具体的には、信号処理用マイコン21は、記憶部22から予め記憶されている歩行者用フィルタ処理の内容や、歩行者用の各種の閾値を取得する。そして信号処理用マイコン21における信号処理に用いられるフィルタ処理や各種の閾値を、取得した歩行者用フィルタ処理の内容や、歩行者用の各種の閾値に置き換える。その一方で、信号処理用マイコン21は物標が車両であると判定すると、信号処理用マイコン21における信号処理を車両検出モードとし続ける処理を行う(S15)。
【0054】
その後、信号処理用マイコン21は、車両に対する物標が存在する方向(方位)および車両から物標までの距離に基づいて、検出した物標の位置を算出する演算処理を行う(S16:位置算出ステップ)。具体的には、信号処理用マイコン21は、ミリ波信号受信部12から入力された5つのアンテナに係る受信信号の間の位相差を演算により求める。求められた位相差に基づいて、信号処理用マイコン21は反射ミリ波の入射方向、言い換えると、車両に対するミリ波を反射した物標の方位を演算により求める。
【0055】
さらに信号処理用マイコン21は、求められた位相差に基づいてミリ波を反射した物標と車両との間の距離を演算により求める。このようにして求められた物標が存在する方向、および、物標までの距離に基づいて、検出した物標の位置を算出する。
【0056】
検出した物標の位置を算出すると、信号処理用マイコン21は、算出された物標の位置に対してフィルタ処理の信号処理を行う。例えば、S13において物標が歩行者であると判定された場合には、S14において記憶部22から取得された歩行者用のフィルタ処理の内容に基づいて信号処理が行われる。逆に、S13において物標が車両であると判定された場合には、車両用のフィルタ処理の内容に基づいて信号処理が行われる。
【0057】
その後、信号処理用マイコン21は上述のS12に戻り、同様の信号処理を繰り返し行う。さらに、信号処理用マイコン21は物標が歩行者であると判定した際には、出力I/F部30を介して、物標検出装置1の外部に向けて歩行者検出信号や、車両に対する歩行者の位置の情報信号が出力される。
【0058】
上記の構成によれば、物標が歩行者であると判定された場合には、それ以後の信号処理用マイコン21における情報処理は記憶部22に予め記憶された歩行者モードに基づいて行われる。そのため、歩行者の位置検出に適した内容の情報処理を行うことができ、歩行者の位置を正確に検出することができる。その一方で、物標が車両であると判定された場合には、記憶部22に予め記憶された車両モードに基づいて情報処理が行われるため、車両の位置検出に支障をきたすことを抑制できる。
【0059】
信号処理用マイコン21におけるフィルタ処理において、物標が歩行者であると判定された場合には歩行者用フィルタ処理を行うことにより、物標検出装置1により検出された歩行者の位置と、実際の歩行者の位置との間の誤差を縮めることができる。具体的には、車両用フィルタ処理と比較して、カットオフ周波数が高い歩行者用フィルタ処理、言い換えると、時間遅れが小さい歩行者用フィルタ処理を行うことで、物標検出装置1が歩行者を検出して位置を算出するまでに要する時間が短縮される。そのため、移動し続ける歩行者の実際の位置と、物標検出装置により検出された歩行者の位置との間の誤差を縮めて、歩行者のより正確な位置を求めることができる。
【0060】
その一方で、物標が車両であると判定された場合には、信号処理用マイコン21において車両用フィルタ処理が行われる。歩行者用フィルタ処理と比較して、車両用フィルタ処理はカットオフ周波数が低いため、車両の幅方向の範囲内で、検出された車両の位置が頻繁に移動することを抑制することができる。
【0061】
信号処理用マイコン21における物標が歩行者か車両かの判定を行う情報処理において、物標が歩行者であると判定された場合には、S21からS23における判定に用いる各種の閾値として歩行者用の閾値を用いることにより、物標が歩行者であると安定して判定することができる。
【0062】
具体的には、歩行者から反射される反射電波は、歩行者の姿勢や動き、更には歩行者が身につけている物の向きや動き等の影響を受けやすい。そのため、信号処理用マイコン21が一つの閾値、例えば車用の閾値のみ、に基づいて物標が歩行者か車両かの判定処理を行うと、物標が歩行者であっても、反射電波の状況によって歩行者と判定される場合もあれば、車両と判定される場合もあり、判定結果が安定しない。そこで、物標が歩行者であると判定された場合には、車両用の各種の閾値と比較して、物標を歩行者と判定しやすい歩行者用の各種の閾値に基づいて、物標が歩行者か車両かの判定処理を行うことで、歩行者である物標が車両であると誤判定される可能性を低減することができる。
【0063】
なお、物標が歩行者であるか、車両であるかを判定する方法は、上述の実施形態のように物標におけるミリ波の反射特性に基づいて判定する方法でもよいし、カメラにより取得された車両前方の映像の解析結果に基づいて判定する方法でもよいし、カーナビゲーションなどに搭載されているロケータから取得される情報に基づいて判定する方法でもよく、特に限定するものではない。
【符号の説明】
【0064】
1…物標検出装置、11…ミリ波信号送信部(送信部)、12…ミリ波信号受信部(受信部)、21…信号処理用マイコン(情報処理部、コンピュータ)、22…記憶部、S12…検出ステップ、S13…判定ステップ、S21…判定ステップ、S22…判定ステップ、S23…判定ステップ
【特許請求の範囲】
【請求項1】
車両の前方に向かって電波を送信する送信部と、
該送信部から送信された前記電波のうち、前記車両の前方に存在する物標によって反射された電波である反射電波を受信する受信部と、
前記物標が歩行者であるか前記車両であるかを判定する情報処理を行うとともに、前記受信部から出力された前記反射電波の受信信号に基づいて前記車両に対する前記物標の位置を演算して求める情報処理を行う情報処理部と、
該情報処理部における情報処理の内容が予め記憶された記憶部と、
が設けられ、
前記記憶部には、前記物標が前記歩行者である場合に前記情報処理部で行われる前記情報処理である歩行者用情報処理の内容、及び、前記物標が前記車両である場合に行われる前記情報処理である車両用情報処理の内容が予め記憶され、
前記情報処理部は、
前記物標が前記歩行者であると判定された場合には、前記記憶部から前記歩行者用情報処理の内容を取得し、取得した前記歩行者用情報処理の内容に基づいて前記情報処理を行い、
前記物標が前記車両であると判定された場合には、前記記憶部から前記車両用情報処理の内容を取得し、取得した前記車両用情報処理の内容に基づいて前記情報処理を行うことを特徴とする物標検出装置。
【請求項2】
前記情報処理部は、前記物標の位置を演算により求める際に、前記受信信号に基づいて求めた前記物標の位置の変動を抑制するフィルタ処理である情報処理を行い、
前記記憶部には、前記情報処理の内容として、前記歩行者用情報処理の際に用いられる歩行者用フィルタ処理の内容、及び、前記車両用情報処理の際に用いられる車両用フィルタ処理の内容が予め記憶されていることを特徴とする請求項1記載の物標検出装置。
【請求項3】
前記情報処理部は、前記反射電波の特性および所定の閾値を対比することにより、前記物標が前記歩行者か前記車両かを判定する情報処理を繰り返し行い、
前記記憶部には、前記情報処理の内容として、直近の判定において前記物標が前記歩行者と判定された場合に用いられる歩行者用閾値、及び、直近の判定において前記物標が前記車両と判定された場合に用いられる車両用閾値が予め記憶されていることを特徴とする請求項1または2に記載の物標検出装置。
【請求項4】
車両の前方に向かって電波を送信し、前記車両の前方に存在する物標から反射された反射電波を受信する検出ステップと、
前記物標が前記歩行者であるか否かを判定する情報処理を行う判定ステップと、
受信した前記反射電波に基づいて、前記車両に対する前記物標の位置を演算して求める情報処理を行う位置算出ステップと、
を有し、
前記物標が前記歩行者である場合には、前記判定ステップ及び前記位置算出ステップの少なくとも一方における前記情報処理において、記憶部に予め記憶された歩行者用情報処理の内容を取得して、当該歩行者用情報処理の内容に基づいて前記情報処理が行われ、
前記物標が前記車両である場合には、前記判定ステップ及び前記位置算出ステップの少なくとも一方における前記情報処理において、前記記憶部に予め記憶された車両用情報処理の内容を取得して、当該車両用情報処理の内容に基づいて前記情報処理が行われることを特徴とする物標検出方法。
【請求項5】
コンピュータに
車両の前方に向かって電波を送信し、前記車両の前方に存在する物標から反射された反射電波を受信する検出機能と、
前記物標が前記歩行者であるか否かを判定する情報処理を行う判定機能と、
受信した前記反射電波に基づいて、前記車両に対する前記物標の位置を演算して求める情報処理を行う位置算出機能と、
を実現させるためのプログラムであって、
前記物標が前記歩行者である場合には、前記判定機能及び前記位置算出機能の少なくとも一方における前記情報処理において、記憶部に予め記憶された歩行者用情報処理の内容を取得して、当該歩行者用情報処理の内容に基づいて前記情報処理が行われ、
前記物標が前記車両である場合には、前記判定機能及び前記位置算出機能の少なくとも一方における前記情報処理において、前記記憶部に予め記憶された車両用情報処理の内容を取得して、当該車両用情報処理の内容に基づいて前記情報処理が行われることを特徴とするプログラム。
【請求項1】
車両の前方に向かって電波を送信する送信部と、
該送信部から送信された前記電波のうち、前記車両の前方に存在する物標によって反射された電波である反射電波を受信する受信部と、
前記物標が歩行者であるか前記車両であるかを判定する情報処理を行うとともに、前記受信部から出力された前記反射電波の受信信号に基づいて前記車両に対する前記物標の位置を演算して求める情報処理を行う情報処理部と、
該情報処理部における情報処理の内容が予め記憶された記憶部と、
が設けられ、
前記記憶部には、前記物標が前記歩行者である場合に前記情報処理部で行われる前記情報処理である歩行者用情報処理の内容、及び、前記物標が前記車両である場合に行われる前記情報処理である車両用情報処理の内容が予め記憶され、
前記情報処理部は、
前記物標が前記歩行者であると判定された場合には、前記記憶部から前記歩行者用情報処理の内容を取得し、取得した前記歩行者用情報処理の内容に基づいて前記情報処理を行い、
前記物標が前記車両であると判定された場合には、前記記憶部から前記車両用情報処理の内容を取得し、取得した前記車両用情報処理の内容に基づいて前記情報処理を行うことを特徴とする物標検出装置。
【請求項2】
前記情報処理部は、前記物標の位置を演算により求める際に、前記受信信号に基づいて求めた前記物標の位置の変動を抑制するフィルタ処理である情報処理を行い、
前記記憶部には、前記情報処理の内容として、前記歩行者用情報処理の際に用いられる歩行者用フィルタ処理の内容、及び、前記車両用情報処理の際に用いられる車両用フィルタ処理の内容が予め記憶されていることを特徴とする請求項1記載の物標検出装置。
【請求項3】
前記情報処理部は、前記反射電波の特性および所定の閾値を対比することにより、前記物標が前記歩行者か前記車両かを判定する情報処理を繰り返し行い、
前記記憶部には、前記情報処理の内容として、直近の判定において前記物標が前記歩行者と判定された場合に用いられる歩行者用閾値、及び、直近の判定において前記物標が前記車両と判定された場合に用いられる車両用閾値が予め記憶されていることを特徴とする請求項1または2に記載の物標検出装置。
【請求項4】
車両の前方に向かって電波を送信し、前記車両の前方に存在する物標から反射された反射電波を受信する検出ステップと、
前記物標が前記歩行者であるか否かを判定する情報処理を行う判定ステップと、
受信した前記反射電波に基づいて、前記車両に対する前記物標の位置を演算して求める情報処理を行う位置算出ステップと、
を有し、
前記物標が前記歩行者である場合には、前記判定ステップ及び前記位置算出ステップの少なくとも一方における前記情報処理において、記憶部に予め記憶された歩行者用情報処理の内容を取得して、当該歩行者用情報処理の内容に基づいて前記情報処理が行われ、
前記物標が前記車両である場合には、前記判定ステップ及び前記位置算出ステップの少なくとも一方における前記情報処理において、前記記憶部に予め記憶された車両用情報処理の内容を取得して、当該車両用情報処理の内容に基づいて前記情報処理が行われることを特徴とする物標検出方法。
【請求項5】
コンピュータに
車両の前方に向かって電波を送信し、前記車両の前方に存在する物標から反射された反射電波を受信する検出機能と、
前記物標が前記歩行者であるか否かを判定する情報処理を行う判定機能と、
受信した前記反射電波に基づいて、前記車両に対する前記物標の位置を演算して求める情報処理を行う位置算出機能と、
を実現させるためのプログラムであって、
前記物標が前記歩行者である場合には、前記判定機能及び前記位置算出機能の少なくとも一方における前記情報処理において、記憶部に予め記憶された歩行者用情報処理の内容を取得して、当該歩行者用情報処理の内容に基づいて前記情報処理が行われ、
前記物標が前記車両である場合には、前記判定機能及び前記位置算出機能の少なくとも一方における前記情報処理において、前記記憶部に予め記憶された車両用情報処理の内容を取得して、当該車両用情報処理の内容に基づいて前記情報処理が行われることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−229947(P2012−229947A)
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願番号】特願2011−97239(P2011−97239)
【出願日】平成23年4月25日(2011.4.25)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願日】平成23年4月25日(2011.4.25)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]