
物標検知装置及び物標検知システム
【課題】 従来の車両検知装置より小型で破損から保護することができる物標検知装置を提供する。
また、物標の有無だけでなく、その方向も検知できる物標検知システムを提供する。
【解決手段】 マイクロ波発振器1で発生するマイクロ波信号1aを第1及び第2の基準信号u1,u2と第3の送信信号4aとに分け、第3の送信信号4aを物標6に対して照射し、物標6で反射された第1及び第2の受信信号w1,w2と第1及び第2の基準信号u1,u2を第1及び第2の検波器81,82に入力して第1及び第2の検波信号8a,8bを得る。そして、第1及び第2のA/D変換器で検波信号8a,8bをA/D変換して得られた検波データx,yを演算処理して物標6の有無を判定する。また、物標検知装置2台を使用して、それぞれの物標検知装置から出力される信号ベクトルの位相差の正負により物標6の方向を判定する。
また、物標の有無だけでなく、その方向も検知できる物標検知システムを提供する。
【解決手段】 マイクロ波発振器1で発生するマイクロ波信号1aを第1及び第2の基準信号u1,u2と第3の送信信号4aとに分け、第3の送信信号4aを物標6に対して照射し、物標6で反射された第1及び第2の受信信号w1,w2と第1及び第2の基準信号u1,u2を第1及び第2の検波器81,82に入力して第1及び第2の検波信号8a,8bを得る。そして、第1及び第2のA/D変換器で検波信号8a,8bをA/D変換して得られた検波データx,yを演算処理して物標6の有無を判定する。また、物標検知装置2台を使用して、それぞれの物標検知装置から出力される信号ベクトルの位相差の正負により物標6の方向を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば駐車区画での物標の有無及び物標の方向を検知する物標検知装置及び物標検知システムに関する。
【背景技術】
【0002】
従来、駐車場などで車両や人の有無を検知する装置には、光遮断方式、超音波反射波検知方式、コイルを用いた磁界変化検出方式などがある。
【0003】
光遮断方式、超音波反射波検知方式を採用した車両検知装置では、各駐車ブロックの入口近傍にポールを立ててそのポール内に発光装置や超音波の発振器を組み込んだり、駐車場の天井に各ブロックに向けて光や超音波等を発するように発光装置や発振器を取付けたりして、光の場合は車両による遮光を検知し、また超音波の場合には車両の存在により変化する反射波を捕らえて車両の有無を検知している。
【0004】
また、コイルを用いた磁界変化検出方式では、各駐車ブロックにコイルを埋設し、そのブロックに車両が位置することによるコイルのインダクタンス変化を検出して車両の有無を検知している。
【0005】
光遮断方式の車両検知装置としては、例えば特許文献1に開示されたものがあり、超音波反射波検知方式の車両検知装置としては、例えば特許文献2に開示されたものがあり、コイルを用いた磁界変化検出方式の車両検知装置としては、例えば、特許文献3に開示されたものがある。
【特許文献1】特開2004−102860号公報
【特許文献2】特開2001−222791号公報
【特許文献3】特許第2587746号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
従来の車両検知装置において、光遮断方式や超音波反射波検知方式では、ポールを建てる必要があるため装置が大型になるという問題があった。
【0007】
また、ポールの低い位置に発光装置や発振器を組み込んだ場合には、いたずら等により発光装置や発振器が破損することがある。また光遮断方式では、発光装置を天井等高い場所に取付けて上述したいたずらを防ぐようにしても、受光部は床面に設置しなければならず、受光部が破損したり、汚れにより受光部が塞がれて誤動作する可能性もある。
【0008】
また、コイルを用いた磁界変化検出方式では、コイルは地中に埋設されるので破損は防止できるが、コイルが大型になるため場所を取るという問題がある。
【0009】
そこで本発明は、従来の車両検知装置と比較して小型で破損から保護することができ、車両のみならず人体等も含む物標を検知する物標検知装置を提供することを目的とする。
【0010】
また、物標の有無だけでなく、その方向も検知できる物標検知システムを提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明の物標検知装置は、マイクロ波信号を発生するマイクロ波発振器と、前記マイクロ波信号を送信する送信アンテナと、前記送信アンテナから送信された前記マイクロ波信号が物標で反射された信号を受信し受信信号を出力する受信アンテナと、前記送信信号と前記受信信号を混合して検波し、検波信号を出力する検波手段と、前記検波信号をA/D変換して検波データを出力するA/D変換器と、前記検波データに基づき物標の存在の有無を判定する演算処理手段とを具備することを特徴とする。
【0012】
また、本発明の物標検知装置は、マイクロ波信号を発生するマイクロ波発振器と、前記マイクロ波信号を第1の分配信号と第2の分配信号とに分配する電力分配器と、前記第1の分配信号を第1の基準信号と第1の送信信号とに分ける第1の方向性結合器と、前記第2の分配信号を第2の基準信号と第2の送信信号とに分ける第2の方向性結合器と、前記第1の送信信号と前記第2の送信信号とを結合して第3の送信信号を出力する電力結合器と、前記第3の送信信号を送信する送信アンテナと、前記送信アンテナから送信された前記第3の送信信号が物標で反射された信号を受信し第1の受信信号を出力する第1の受信アンテナと、前記送信アンテナから送信された前記第3の送信信号が物標で反射された信号を受信し第2の受信信号を出力する第2の受信アンテナと、前記第1の基準信号と前記第1の受信信号が混合して入力された信号を検波して第1の検波信号を出力する第1の検波手段と、前記第2の基準信号と前記第2の受信信号が混合して入力された信号を検波して第2の検波信号を出力する第2の検波手段と、前記第1の検波信号をA/D変換して第1の検波データを出力する第1のA/D変換器と、前記第2の検波信号をA/D変換して第2の検波データを出力する第2のA/D変換器と、物標が存在しない状態での前記第1の検波データと物標が存在する状態での前記第1の検波データとの差と、物標が存在しない状態での前記第2の検波データと物標が存在する状態での前記第2の検波データとの差を求めることにより得られる信号ベクトルの大きさに基づき物標の存在の有無を判定する演算処理手段とを具備することを特徴とする。
【0013】
また、本発明の物標検知システムは、請求項1または請求項2に記載の物標検知装置を2台配置した物標検知システムであって、物標が存在しない状態で検出される検波データと物標が存在する状態で検出される検波データとの差を求めることにより得られる第1の信号ベクトルを出力する第1の物標検知装置と、物標が存在しない状態で検出される検波データと物標が存在する状態で検出される検波データとの差を求めることにより得られる第2の信号ベクトルを出力する第2の物標検知装置と、前記第1の信号ベクトルと前記第2の信号ベクトルとの位相差を求め、この位相差に基づいて物標の方向を判定する演算処理装置とを具備することを特徴とする。
【発明の効果】
【0014】
本発明の物標検知装置は、マイクロ波を利用するので従来の車両検知装置と比較して装置の小型化が可能であり、また、マイクロ波は透過性を有するのでマイクロ波センサーにカバーを装着できるので破損から保護することができる。
【0015】
また、本発明の物標検知システムによれば、2台配置した物標検知装置それぞれが出力する信号ベクトルの位相差を求める演算処理を行うことにより、物標の有無だけでなく、その方向も検知することができる。
【発明を実施するための最良の形態】
【0016】
以下本発明の物標検知装置及び物標検知システムの一実施例を、図面を参照して説明する。
【0017】
[第一実施例]
図1は本発明の物標検知装置の第一実施例の構成を示したものである。
【0018】
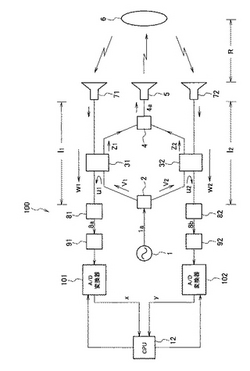
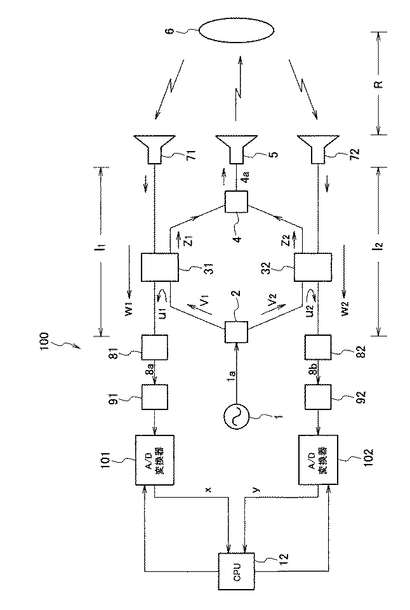
本実施例の物標検知装置100は、マイクロ波信号1aを発生するマイクロ波発振器1と、マイクロ波信号1aを第1の分配信号v1と第2の分配信号v2とに分配する電力分配器2と、第1の分配信号v1を第1の基準信号u1と第1の送信信号z1とに分ける第1の方向性結合器31と、第2の分配信号v2を第2の基準信号u2と第2の送信信号z2とに分ける第2の方向性結合器32と、第1の送信信号z1と第2の送信信号z2とを結合して第3の送信信号4aを出力する電力結合器4と、第3の送信信号4aを送信する送信アンテナ5と、送信アンテナ5から送信された第3の送信信号4aが物標6で反射された信号を受信し第1の受信信号w1を出力する第1の受信アンテナ71と、送信アンテナ5から送信された第3の送信信号4aが物標6で反射された信号を受信し第2の受信信号w2を出力する第2の受信アンテナ72と、第1の基準信号u1と第1の受信信号w1が入力され第1の検波信号8aを出力する第1の検波器81と、第2の基準信号u2と第2の受信信号w2が入力され第2の検波信号8bを出力する第2の検波器82と、第1の検波信号8aを増幅する第1の増幅器91と、第2の検波信号8bを増幅する第2の増幅器92と、第1の検波信号8aをA/D変換して第1の検波データxを出力する第1のA/D変換器101と、第2の検波信号8bをA/D変換して第2の検波データyを出力する第2のA/D変換器102と、ROM及びRAMを内蔵し、第1及び第2の検波データx,yを処理して物標6の有無を判定するCPU12とを備える。
【0019】
なお、第1及び第2の検波器81,82としては例えばダイオードを使用し、第1及び第2の増幅器91,92としては例えばオペアンプを使用する。
【0020】
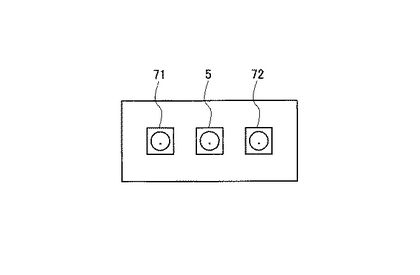
なお、図1に示す回路は図2に示すように送信アンテナ5と第1及び第2の受信アンテナ71,72を同一平面内に配置したアンテナ部の後面内に配置して実施するが、第1及び第2のA/D変換器101,102とCPU12を使用して物標6の存在の有無を判定するアルゴリズムは遠隔にあるコンピューターで実施する。
【0021】
ここで、本実施例の物標検知装置100の基本動作を説明する。マイクロ波発振器1はマイクロ波信号1aを発生して電力分配器2に供給する。電力分配器2はマイクロ波信号1aを第1の分配信号v1と第2の分配信号v2とに分配し、第1の分配信号v1,第2の分配信号v2をそれぞれ第1及び第2の方向性結合器31及び32に供給する。第1の方向性結合器31は第1の分配信号v1を第1の基準信号u1と第1の送信信号z1とに分け、第1の送信信号z1を電力結合器4に供給し、第2の方向性結合器32は第2の分配信号v2を第2の基準信号u2と第2の送信信号z2とに分け、第2の送信信号z2を電力結合器4に供給する。電力結合器4は、第1の送信信号z1と第2の送信信号z2とを結合して第3の送信信号4aを送信アンテナ5に供給する。
【0022】
次に、送信アンテナ5は第3の送信信号4aを物標6に対して照射し、第1及び第2の受信アンテナ71,72は第3の送信信号4aの照射を受けた物標6で反射された信号を受信して、それぞれ第1及び第2の受信信号w1,w2を出力する。第1の検波器81には第1の基準信号u1と第1の受信信号w1が入力されて第1の検波信号8aが出力され、第2の検波器82には第2の基準信号u2と第2の受信信号w2が入力されて第2の検波信号8bが出力される。第1及び第2の増幅器91,92は第1及び第2の検波信号8a,8bをそれぞれ増幅して第1及び第2のA/D変換器101,102に供給する。
【0023】
そして、第1及び第2のA/D変換器101,102は第1及び第2の検波信号8a,8bをA/D変換して第1及び第2の検波データx,yをCPU12に供給する。
【0024】
そして、CPU12は、ROMに記憶されている後述の演算処理を行うプログラムに従って処理を実行し、RAMによって後述のオフセット電圧を一時記憶する。
【0025】
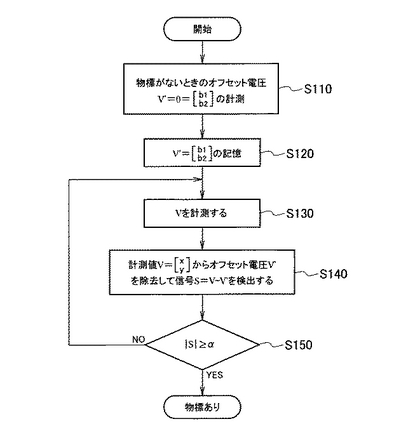
ここで、本実施例の物標検知装置100の物標検知手順を、図4に示すフローチャートを参照して説明する。なお、図4に示すフローチャートは演算プログラムとしてROMに記憶されている。

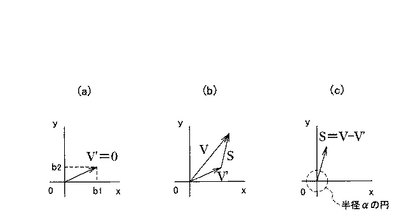
次に、第1及び第2の検波データx,yから物標の有無を検出する方法を図3に示すベクトル図を参照して説明する。
【0026】
第1及び第2の検波データx,yは、
x=b1+acos(2βR+θ1) (数式1)
y=b2+acos(2βR+θ2) (数式2)
と表される。ここで、b1,b2は直流オフセット電圧、aは物標反射波の受信信号の振幅に比例した項、β=2π/λ0、λ0は周波数f0の波長であり、f0=24GHzのときλ0=1.25cmである。
【0027】
また、位相θ1,θ2は第1及び第2の受信信号w1,w2が第1及び第2の検波器81,82に至るまでに長さl1,l2の導波路を通過するときに受ける位相変化であり、
θ1=βg l1 (数式3)
θ2=βg l2 (数式4)
である。ここで、βg=2π/λg、λgは導波路上の波長である。
【0028】
いまl1,l2による位相量として例えば、
【数1】
【0029】
に選べば、
x=b1+acos2βR (数式6)
y=b2+asin2βR (数式7)
となる。これらをまとめてベクトルで表現すれば、
【数2】
【0030】
である。
【0031】
したがって、図3(c)に示したように半径αの円を設け、(数式12)があるレベルα以上となるかどうかで物標6の有無が判定できる。
【0032】
すなわち、
【数3】
【0033】
であれば車や人などの物標6が存在していると判定し、
【数4】
【0034】
であれば物標6は存在しないと判定する。
【0035】
本実施例の物標検知装置100はマイクロ波を利用するので、従来のような光遮断方式、超音波反射波検知方式、コイルを用いた磁界変化検出方式の車両検知装置と比較して装置の小型化が可能であり、また、マイクロ波は透過性を有するのでマイクロ波センサーにカバーを装着できるので破損から保護することができる。
【0036】
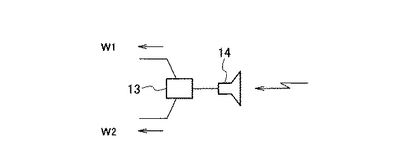
なお、図1では受信アンテナを2個用いたが、それらの間隔は波長λ0に比べて十分小さいか、又は図2のアンテナ配置を垂直に用いる。また図5に示すように電力分配器13を用いれば1個の受信アンテナ14だけでよい。
【0037】
[第二実施例]
図6は本発明の物標検知装置の第二実施例の構成を示したものである。なお、図1に示した第一実施例の構成と同一構成には同一符号を付し、詳細な説明は省略する。
【0038】
本実施例の物標検知装置600は、マイクロ波発振器1と、送受信兼用のアンテナ51と、マイクロ波発振器1とアンテナ51とを結ぶ導波路上に設置されたN個の検波部K1〜KNと、検波部K1〜KNにそれぞれ接続されたN個の増幅器F1〜FNと、増幅器F1〜FNにそれぞれ接続されたN個のA/D変換器AD1〜ADNと、CPU12とを備える。
【0039】
なお、検波部K1〜KNはダイオードD1〜DNと、ダイオードD1〜DNそれぞれの出力側に一端が接続され他端が接地された負荷用抵抗r1〜rNとから構成される。
【0040】
ここで、本実施例の物標検知装置600の基本動作を説明する。マイクロ波発振器1はマイクロ波信号1aを発生する。このマイクロ波信号1aは送信信号etと同時に基準信号el1〜elNとして働く。
【0041】
そして、アンテナ51は、物標6に対して送信信号etを照射し、また、送信信号etの照射を受けた物標6で反射された信号を受信して受信信号erを出力する。
【0042】
検波部K1〜KNには基準信号el1〜elNと受信信号er1〜erNが入力されて検波信号e1〜eNが出力される。
【0043】
その後、増幅器F1〜FNは検波信号e1〜eNを増幅してA/D変換器AD1〜ADNに供給し、A/D変換器AD1〜ADNは検波信号e1〜eNをA/D変換して検波データx1〜xNをCPU12に供給する。CPU12は第一実施例と同様の処理を行う。
【数5】
【0044】
本実施例は、導波路上に検波部K1〜KNを置いたもので、第一の実施例と同様の効果が得られる。
【0045】
しかし、一般にはこのような正確な設定は困難であるので、十分な数のN個所(N≧2)に検波部を設置し、それらN個の検波出力を用いれば物標の存在の判定がより確実になる。
【数6】
【0046】
次に、本発明の物標検知システム800の一実施例を、図7〜図10を参照して説明する。
【0047】
[第三実施例]
図8は本発明の物標検知システム800の第三実施例の構成を示したものである。
【0048】
本実施例の物標検知システム800は、適当な間隔で配置された第1及び第2の物標検知装置100A,100Bと、第1及び第2の物標検知装置100A,100Bに接続された演算処理装置15を備える。
【0049】
なお、第1及び第2の物標検知装置100A,100Bはともに図1の物標検知装置100と同一の構成である。図8中の各部分の符号は、図1の各部分の符号の後ろに、第1の物標検知装置100AについてはAを、第2の物標検知装置100BについてはBを付加したものであり、それぞれが図1の物標検知装置100の各部分と同じ部分であることを示す。
【0050】
そして、演算処理装置15は、後述の演算処理を行うプログラムに従って処理を実行する。
【0051】
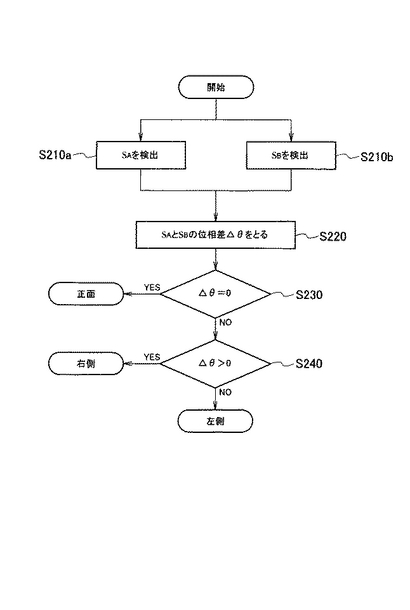
次に、本実施例の物標検知システム800の物標検知手順を、図7に示すフローチャートを参照して説明する。なお、図7に示すフローチャートは演算プログラムとして演算処理装置15に記憶されている。
【0052】
図10に示す位相差Δθは、
【数7】
【0053】
とおけば、
【数8】
【0054】
から計算でき、
Δθ=β(RB−RA),β=2π/λ0 (数式19)
となる。ここで、RA,RBは第1及び第2の物標検知装置100A,100Bから物標までの距離である。
【0055】
物標の位置座標を(X,Y)、第1の物標検知装置100Aの座標を(d,0)、第2の物標検知装置100Bの座標を(−d,0)、原点から物標までの距離をR0とし、d≪R0とすれば、
【数9】
【数10】
【数11】
【0056】
で表される。
【0057】
したがって、(数式19)は、
【数12】
【0058】
となる。
【0059】
よって、Xの正負で方向が判定でき、Δθ>0のとき物標は右側、Δθ<0のとき物標は左側、Δθ=0のとき物標は正面となる。
【0060】
上記説明したように、本実施例によれば、2台の物標検知装置を配置し、それぞれの物標検知装置において検出した反射信号の信号ベクトルの位相差を求めるので、物標の有無だけでなく、その方向も検知することができる。
【0061】
なお、本実施例では2台の物標検知装置を使用したが、3台以上の物標検知装置を使用して行うこともできる。
【図面の簡単な説明】
【0062】
【図1】本発明の物標検知装置の第一実施例の構成を示す概略図である。
【図2】図1に示した物標検知装置の送信アンテナと受信アンテナの配置を示す概略図である。
【図3】図1に示した物標検知装置で物標の有無を判定する方法を説明するベクトル図である。
【図4】図1に示した物標検知装置で物標の有無を判定する手順を示すフローチャートである。
【図5】図1に示した物標検知装置において受信アンテナを1つで構成する場合の受信アンテナと電力分配器の構成を示す概略図である。
【図6】本発明の物標検知装置の第二実施例の構成を示す概略図である。
【図7】本発明の物標検知システムの第三実施例において物標の存在する方向を判別する手順を示すフローチャートである。
【図8】本発明の物標検知システムの第三実施例の構成を示す概略図である。
【図9】本発明の物標検知システムの第三実施例における第1及び第2の物標検知装置と物標の位置関係を示す図である。
【図10】本発明の物標検知システムの第三実施例において第1及び第2の物標検知装置が検出した信号ベクトルとそれぞれのベクトルの位相差の関係を示す図である。
【符号の説明】
【0063】
1 マイクロ波発振器
2 電力分配器
31 第1の方向性結合器
32 第2の方向性結合器
4 電力結合器
5 送信アンテナ
51 アンテナ
6 物標
71 第1の受信アンテナ
72 第2の受信アンテナ
81 第1の検波器
82 第2の検波器
91 第1の増幅器
92 第2の増幅器
101 第1のA/D変換器
102 第2のA/D変換器
12 CPU
13 電力分配器
14 受信アンテナ
15 演算処理装置
100 物標検知装置
600 物標検知装置
800 物標検知システム
K1〜KN 検波部
D1〜DN ダイオード
r1〜rN 負荷用抵抗
F1〜FN 増幅器
AD1〜ADN A/D変換器
100A 第1の物標検知装置
100B 第2の物標検知装置
【技術分野】
【0001】
本発明は、例えば駐車区画での物標の有無及び物標の方向を検知する物標検知装置及び物標検知システムに関する。
【背景技術】
【0002】
従来、駐車場などで車両や人の有無を検知する装置には、光遮断方式、超音波反射波検知方式、コイルを用いた磁界変化検出方式などがある。
【0003】
光遮断方式、超音波反射波検知方式を採用した車両検知装置では、各駐車ブロックの入口近傍にポールを立ててそのポール内に発光装置や超音波の発振器を組み込んだり、駐車場の天井に各ブロックに向けて光や超音波等を発するように発光装置や発振器を取付けたりして、光の場合は車両による遮光を検知し、また超音波の場合には車両の存在により変化する反射波を捕らえて車両の有無を検知している。
【0004】
また、コイルを用いた磁界変化検出方式では、各駐車ブロックにコイルを埋設し、そのブロックに車両が位置することによるコイルのインダクタンス変化を検出して車両の有無を検知している。
【0005】
光遮断方式の車両検知装置としては、例えば特許文献1に開示されたものがあり、超音波反射波検知方式の車両検知装置としては、例えば特許文献2に開示されたものがあり、コイルを用いた磁界変化検出方式の車両検知装置としては、例えば、特許文献3に開示されたものがある。
【特許文献1】特開2004−102860号公報
【特許文献2】特開2001−222791号公報
【特許文献3】特許第2587746号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
従来の車両検知装置において、光遮断方式や超音波反射波検知方式では、ポールを建てる必要があるため装置が大型になるという問題があった。
【0007】
また、ポールの低い位置に発光装置や発振器を組み込んだ場合には、いたずら等により発光装置や発振器が破損することがある。また光遮断方式では、発光装置を天井等高い場所に取付けて上述したいたずらを防ぐようにしても、受光部は床面に設置しなければならず、受光部が破損したり、汚れにより受光部が塞がれて誤動作する可能性もある。
【0008】
また、コイルを用いた磁界変化検出方式では、コイルは地中に埋設されるので破損は防止できるが、コイルが大型になるため場所を取るという問題がある。
【0009】
そこで本発明は、従来の車両検知装置と比較して小型で破損から保護することができ、車両のみならず人体等も含む物標を検知する物標検知装置を提供することを目的とする。
【0010】
また、物標の有無だけでなく、その方向も検知できる物標検知システムを提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明の物標検知装置は、マイクロ波信号を発生するマイクロ波発振器と、前記マイクロ波信号を送信する送信アンテナと、前記送信アンテナから送信された前記マイクロ波信号が物標で反射された信号を受信し受信信号を出力する受信アンテナと、前記送信信号と前記受信信号を混合して検波し、検波信号を出力する検波手段と、前記検波信号をA/D変換して検波データを出力するA/D変換器と、前記検波データに基づき物標の存在の有無を判定する演算処理手段とを具備することを特徴とする。
【0012】
また、本発明の物標検知装置は、マイクロ波信号を発生するマイクロ波発振器と、前記マイクロ波信号を第1の分配信号と第2の分配信号とに分配する電力分配器と、前記第1の分配信号を第1の基準信号と第1の送信信号とに分ける第1の方向性結合器と、前記第2の分配信号を第2の基準信号と第2の送信信号とに分ける第2の方向性結合器と、前記第1の送信信号と前記第2の送信信号とを結合して第3の送信信号を出力する電力結合器と、前記第3の送信信号を送信する送信アンテナと、前記送信アンテナから送信された前記第3の送信信号が物標で反射された信号を受信し第1の受信信号を出力する第1の受信アンテナと、前記送信アンテナから送信された前記第3の送信信号が物標で反射された信号を受信し第2の受信信号を出力する第2の受信アンテナと、前記第1の基準信号と前記第1の受信信号が混合して入力された信号を検波して第1の検波信号を出力する第1の検波手段と、前記第2の基準信号と前記第2の受信信号が混合して入力された信号を検波して第2の検波信号を出力する第2の検波手段と、前記第1の検波信号をA/D変換して第1の検波データを出力する第1のA/D変換器と、前記第2の検波信号をA/D変換して第2の検波データを出力する第2のA/D変換器と、物標が存在しない状態での前記第1の検波データと物標が存在する状態での前記第1の検波データとの差と、物標が存在しない状態での前記第2の検波データと物標が存在する状態での前記第2の検波データとの差を求めることにより得られる信号ベクトルの大きさに基づき物標の存在の有無を判定する演算処理手段とを具備することを特徴とする。
【0013】
また、本発明の物標検知システムは、請求項1または請求項2に記載の物標検知装置を2台配置した物標検知システムであって、物標が存在しない状態で検出される検波データと物標が存在する状態で検出される検波データとの差を求めることにより得られる第1の信号ベクトルを出力する第1の物標検知装置と、物標が存在しない状態で検出される検波データと物標が存在する状態で検出される検波データとの差を求めることにより得られる第2の信号ベクトルを出力する第2の物標検知装置と、前記第1の信号ベクトルと前記第2の信号ベクトルとの位相差を求め、この位相差に基づいて物標の方向を判定する演算処理装置とを具備することを特徴とする。
【発明の効果】
【0014】
本発明の物標検知装置は、マイクロ波を利用するので従来の車両検知装置と比較して装置の小型化が可能であり、また、マイクロ波は透過性を有するのでマイクロ波センサーにカバーを装着できるので破損から保護することができる。
【0015】
また、本発明の物標検知システムによれば、2台配置した物標検知装置それぞれが出力する信号ベクトルの位相差を求める演算処理を行うことにより、物標の有無だけでなく、その方向も検知することができる。
【発明を実施するための最良の形態】
【0016】
以下本発明の物標検知装置及び物標検知システムの一実施例を、図面を参照して説明する。
【0017】
[第一実施例]
図1は本発明の物標検知装置の第一実施例の構成を示したものである。
【0018】
本実施例の物標検知装置100は、マイクロ波信号1aを発生するマイクロ波発振器1と、マイクロ波信号1aを第1の分配信号v1と第2の分配信号v2とに分配する電力分配器2と、第1の分配信号v1を第1の基準信号u1と第1の送信信号z1とに分ける第1の方向性結合器31と、第2の分配信号v2を第2の基準信号u2と第2の送信信号z2とに分ける第2の方向性結合器32と、第1の送信信号z1と第2の送信信号z2とを結合して第3の送信信号4aを出力する電力結合器4と、第3の送信信号4aを送信する送信アンテナ5と、送信アンテナ5から送信された第3の送信信号4aが物標6で反射された信号を受信し第1の受信信号w1を出力する第1の受信アンテナ71と、送信アンテナ5から送信された第3の送信信号4aが物標6で反射された信号を受信し第2の受信信号w2を出力する第2の受信アンテナ72と、第1の基準信号u1と第1の受信信号w1が入力され第1の検波信号8aを出力する第1の検波器81と、第2の基準信号u2と第2の受信信号w2が入力され第2の検波信号8bを出力する第2の検波器82と、第1の検波信号8aを増幅する第1の増幅器91と、第2の検波信号8bを増幅する第2の増幅器92と、第1の検波信号8aをA/D変換して第1の検波データxを出力する第1のA/D変換器101と、第2の検波信号8bをA/D変換して第2の検波データyを出力する第2のA/D変換器102と、ROM及びRAMを内蔵し、第1及び第2の検波データx,yを処理して物標6の有無を判定するCPU12とを備える。
【0019】
なお、第1及び第2の検波器81,82としては例えばダイオードを使用し、第1及び第2の増幅器91,92としては例えばオペアンプを使用する。
【0020】
なお、図1に示す回路は図2に示すように送信アンテナ5と第1及び第2の受信アンテナ71,72を同一平面内に配置したアンテナ部の後面内に配置して実施するが、第1及び第2のA/D変換器101,102とCPU12を使用して物標6の存在の有無を判定するアルゴリズムは遠隔にあるコンピューターで実施する。
【0021】
ここで、本実施例の物標検知装置100の基本動作を説明する。マイクロ波発振器1はマイクロ波信号1aを発生して電力分配器2に供給する。電力分配器2はマイクロ波信号1aを第1の分配信号v1と第2の分配信号v2とに分配し、第1の分配信号v1,第2の分配信号v2をそれぞれ第1及び第2の方向性結合器31及び32に供給する。第1の方向性結合器31は第1の分配信号v1を第1の基準信号u1と第1の送信信号z1とに分け、第1の送信信号z1を電力結合器4に供給し、第2の方向性結合器32は第2の分配信号v2を第2の基準信号u2と第2の送信信号z2とに分け、第2の送信信号z2を電力結合器4に供給する。電力結合器4は、第1の送信信号z1と第2の送信信号z2とを結合して第3の送信信号4aを送信アンテナ5に供給する。
【0022】
次に、送信アンテナ5は第3の送信信号4aを物標6に対して照射し、第1及び第2の受信アンテナ71,72は第3の送信信号4aの照射を受けた物標6で反射された信号を受信して、それぞれ第1及び第2の受信信号w1,w2を出力する。第1の検波器81には第1の基準信号u1と第1の受信信号w1が入力されて第1の検波信号8aが出力され、第2の検波器82には第2の基準信号u2と第2の受信信号w2が入力されて第2の検波信号8bが出力される。第1及び第2の増幅器91,92は第1及び第2の検波信号8a,8bをそれぞれ増幅して第1及び第2のA/D変換器101,102に供給する。
【0023】
そして、第1及び第2のA/D変換器101,102は第1及び第2の検波信号8a,8bをA/D変換して第1及び第2の検波データx,yをCPU12に供給する。
【0024】
そして、CPU12は、ROMに記憶されている後述の演算処理を行うプログラムに従って処理を実行し、RAMによって後述のオフセット電圧を一時記憶する。
【0025】
ここで、本実施例の物標検知装置100の物標検知手順を、図4に示すフローチャートを参照して説明する。なお、図4に示すフローチャートは演算プログラムとしてROMに記憶されている。
次に、第1及び第2の検波データx,yから物標の有無を検出する方法を図3に示すベクトル図を参照して説明する。
【0026】
第1及び第2の検波データx,yは、
x=b1+acos(2βR+θ1) (数式1)
y=b2+acos(2βR+θ2) (数式2)
と表される。ここで、b1,b2は直流オフセット電圧、aは物標反射波の受信信号の振幅に比例した項、β=2π/λ0、λ0は周波数f0の波長であり、f0=24GHzのときλ0=1.25cmである。
【0027】
また、位相θ1,θ2は第1及び第2の受信信号w1,w2が第1及び第2の検波器81,82に至るまでに長さl1,l2の導波路を通過するときに受ける位相変化であり、
θ1=βg l1 (数式3)
θ2=βg l2 (数式4)
である。ここで、βg=2π/λg、λgは導波路上の波長である。
【0028】
いまl1,l2による位相量として例えば、
【数1】
【0029】
に選べば、
x=b1+acos2βR (数式6)
y=b2+asin2βR (数式7)
となる。これらをまとめてベクトルで表現すれば、
【数2】
【0030】
である。
【0031】
したがって、図3(c)に示したように半径αの円を設け、(数式12)があるレベルα以上となるかどうかで物標6の有無が判定できる。
【0032】
すなわち、
【数3】
【0033】
であれば車や人などの物標6が存在していると判定し、
【数4】
【0034】
であれば物標6は存在しないと判定する。
【0035】
本実施例の物標検知装置100はマイクロ波を利用するので、従来のような光遮断方式、超音波反射波検知方式、コイルを用いた磁界変化検出方式の車両検知装置と比較して装置の小型化が可能であり、また、マイクロ波は透過性を有するのでマイクロ波センサーにカバーを装着できるので破損から保護することができる。
【0036】
なお、図1では受信アンテナを2個用いたが、それらの間隔は波長λ0に比べて十分小さいか、又は図2のアンテナ配置を垂直に用いる。また図5に示すように電力分配器13を用いれば1個の受信アンテナ14だけでよい。
【0037】
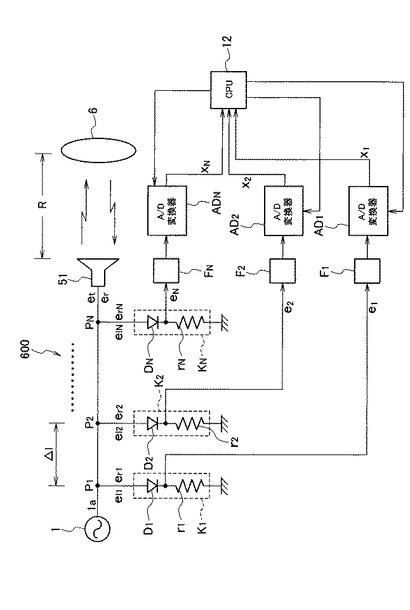
[第二実施例]
図6は本発明の物標検知装置の第二実施例の構成を示したものである。なお、図1に示した第一実施例の構成と同一構成には同一符号を付し、詳細な説明は省略する。
【0038】
本実施例の物標検知装置600は、マイクロ波発振器1と、送受信兼用のアンテナ51と、マイクロ波発振器1とアンテナ51とを結ぶ導波路上に設置されたN個の検波部K1〜KNと、検波部K1〜KNにそれぞれ接続されたN個の増幅器F1〜FNと、増幅器F1〜FNにそれぞれ接続されたN個のA/D変換器AD1〜ADNと、CPU12とを備える。
【0039】
なお、検波部K1〜KNはダイオードD1〜DNと、ダイオードD1〜DNそれぞれの出力側に一端が接続され他端が接地された負荷用抵抗r1〜rNとから構成される。
【0040】
ここで、本実施例の物標検知装置600の基本動作を説明する。マイクロ波発振器1はマイクロ波信号1aを発生する。このマイクロ波信号1aは送信信号etと同時に基準信号el1〜elNとして働く。
【0041】
そして、アンテナ51は、物標6に対して送信信号etを照射し、また、送信信号etの照射を受けた物標6で反射された信号を受信して受信信号erを出力する。
【0042】
検波部K1〜KNには基準信号el1〜elNと受信信号er1〜erNが入力されて検波信号e1〜eNが出力される。
【0043】
その後、増幅器F1〜FNは検波信号e1〜eNを増幅してA/D変換器AD1〜ADNに供給し、A/D変換器AD1〜ADNは検波信号e1〜eNをA/D変換して検波データx1〜xNをCPU12に供給する。CPU12は第一実施例と同様の処理を行う。
【数5】
【0044】
本実施例は、導波路上に検波部K1〜KNを置いたもので、第一の実施例と同様の効果が得られる。
【0045】
しかし、一般にはこのような正確な設定は困難であるので、十分な数のN個所(N≧2)に検波部を設置し、それらN個の検波出力を用いれば物標の存在の判定がより確実になる。
【数6】
【0046】
次に、本発明の物標検知システム800の一実施例を、図7〜図10を参照して説明する。
【0047】
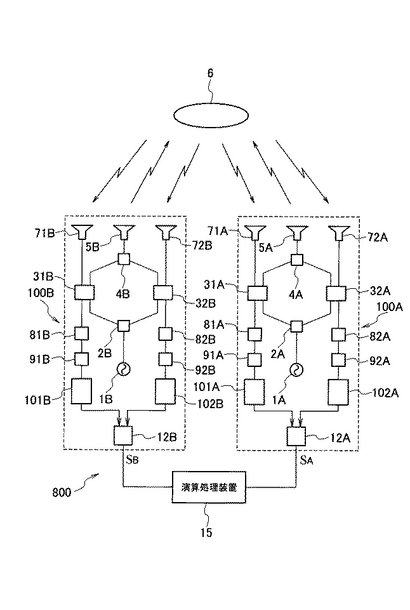
[第三実施例]
図8は本発明の物標検知システム800の第三実施例の構成を示したものである。
【0048】
本実施例の物標検知システム800は、適当な間隔で配置された第1及び第2の物標検知装置100A,100Bと、第1及び第2の物標検知装置100A,100Bに接続された演算処理装置15を備える。
【0049】
なお、第1及び第2の物標検知装置100A,100Bはともに図1の物標検知装置100と同一の構成である。図8中の各部分の符号は、図1の各部分の符号の後ろに、第1の物標検知装置100AについてはAを、第2の物標検知装置100BについてはBを付加したものであり、それぞれが図1の物標検知装置100の各部分と同じ部分であることを示す。
【0050】
そして、演算処理装置15は、後述の演算処理を行うプログラムに従って処理を実行する。
【0051】
次に、本実施例の物標検知システム800の物標検知手順を、図7に示すフローチャートを参照して説明する。なお、図7に示すフローチャートは演算プログラムとして演算処理装置15に記憶されている。
【0052】
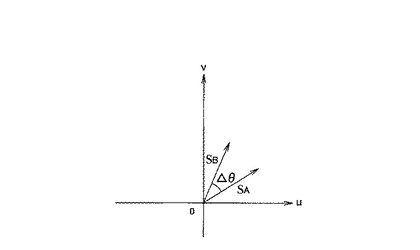
図10に示す位相差Δθは、
【数7】
【0053】
とおけば、
【数8】
【0054】
から計算でき、
Δθ=β(RB−RA),β=2π/λ0 (数式19)
となる。ここで、RA,RBは第1及び第2の物標検知装置100A,100Bから物標までの距離である。
【0055】
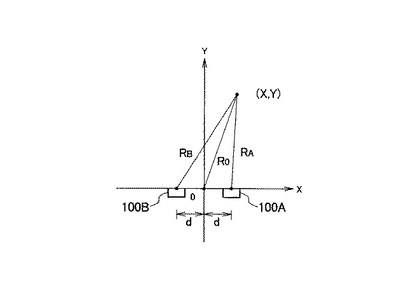
物標の位置座標を(X,Y)、第1の物標検知装置100Aの座標を(d,0)、第2の物標検知装置100Bの座標を(−d,0)、原点から物標までの距離をR0とし、d≪R0とすれば、
【数9】
【数10】
【数11】
【0056】
で表される。
【0057】
したがって、(数式19)は、
【数12】
【0058】
となる。
【0059】
よって、Xの正負で方向が判定でき、Δθ>0のとき物標は右側、Δθ<0のとき物標は左側、Δθ=0のとき物標は正面となる。
【0060】
上記説明したように、本実施例によれば、2台の物標検知装置を配置し、それぞれの物標検知装置において検出した反射信号の信号ベクトルの位相差を求めるので、物標の有無だけでなく、その方向も検知することができる。
【0061】
なお、本実施例では2台の物標検知装置を使用したが、3台以上の物標検知装置を使用して行うこともできる。
【図面の簡単な説明】
【0062】
【図1】本発明の物標検知装置の第一実施例の構成を示す概略図である。
【図2】図1に示した物標検知装置の送信アンテナと受信アンテナの配置を示す概略図である。
【図3】図1に示した物標検知装置で物標の有無を判定する方法を説明するベクトル図である。
【図4】図1に示した物標検知装置で物標の有無を判定する手順を示すフローチャートである。
【図5】図1に示した物標検知装置において受信アンテナを1つで構成する場合の受信アンテナと電力分配器の構成を示す概略図である。
【図6】本発明の物標検知装置の第二実施例の構成を示す概略図である。
【図7】本発明の物標検知システムの第三実施例において物標の存在する方向を判別する手順を示すフローチャートである。
【図8】本発明の物標検知システムの第三実施例の構成を示す概略図である。
【図9】本発明の物標検知システムの第三実施例における第1及び第2の物標検知装置と物標の位置関係を示す図である。
【図10】本発明の物標検知システムの第三実施例において第1及び第2の物標検知装置が検出した信号ベクトルとそれぞれのベクトルの位相差の関係を示す図である。
【符号の説明】
【0063】
1 マイクロ波発振器
2 電力分配器
31 第1の方向性結合器
32 第2の方向性結合器
4 電力結合器
5 送信アンテナ
51 アンテナ
6 物標
71 第1の受信アンテナ
72 第2の受信アンテナ
81 第1の検波器
82 第2の検波器
91 第1の増幅器
92 第2の増幅器
101 第1のA/D変換器
102 第2のA/D変換器
12 CPU
13 電力分配器
14 受信アンテナ
15 演算処理装置
100 物標検知装置
600 物標検知装置
800 物標検知システム
K1〜KN 検波部
D1〜DN ダイオード
r1〜rN 負荷用抵抗
F1〜FN 増幅器
AD1〜ADN A/D変換器
100A 第1の物標検知装置
100B 第2の物標検知装置
【特許請求の範囲】
【請求項1】
マイクロ波信号を発生するマイクロ波発振器と、
前記マイクロ波信号を送信する送信アンテナと、
前記送信アンテナから送信された前記マイクロ波信号が物標で反射された信号を受信し受信信号を出力する受信アンテナと、
前記送信信号と前記受信信号を混合して検波し、検波信号を出力する検波手段と、
前記検波信号をA/D変換して検波データを出力するA/D変換器と、
前記検波データに基づき物標の存在の有無を判定する演算処理手段と
を具備することを特徴とする物標検知装置。
【請求項2】
マイクロ波信号を発生するマイクロ波発振器と、
前記マイクロ波信号を第1の分配信号と第2の分配信号とに分配する電力分配器と、
前記第1の分配信号を第1の基準信号と第1の送信信号とに分ける第1の方向性結合器と、
前記第2の分配信号を第2の基準信号と第2の送信信号とに分ける第2の方向性結合器と、
前記第1の送信信号と前記第2の送信信号とを結合して第3の送信信号を出力する電力結合器と、
前記第3の送信信号を送信する送信アンテナと、
前記送信アンテナから送信された前記第3の送信信号が物標で反射された信号を受信し第1の受信信号を出力する第1の受信アンテナと、
前記送信アンテナから送信された前記第3の送信信号が物標で反射された信号を受信し第2の受信信号を出力する第2の受信アンテナと、
前記第1の基準信号と前記第1の受信信号が混合して入力された信号を検波して第1の検波信号を出力する第1の検波手段と、
前記第2の基準信号と前記第2の受信信号が混合して入力された信号を検波して第2の検波信号を出力する第2の検波手段と、
前記第1の検波信号をA/D変換して第1の検波データを出力する第1のA/D変換器と、
前記第2の検波信号をA/D変換して第2の検波データを出力する第2のA/D変換器と、
物標が存在しない状態での前記第1の検波データと物標が存在する状態での前記第1の検波データとの差と、物標が存在しない状態での前記第2の検波データと物標が存在する状態での前記第2の検波データとの差を求めることにより得られる信号ベクトルの大きさに基づき物標の存在の有無を判定する演算処理手段と
を具備することを特徴とする物標検知装置。
【請求項3】
請求項1または請求項2に記載の物標検知装置を2台配置した物標検知システムであって、
物標が存在しない状態で検出される検波データと物標が存在する状態で検出される検波データとの差を求めることにより得られる第1の信号ベクトルを出力する第1の物標検知装置と、
物標が存在しない状態で検出される検波データと物標が存在する状態で検出される検波データとの差を求めることにより得られる第2の信号ベクトルを出力する第2の物標検知装置と、
前記第1の信号ベクトルと前記第2の信号ベクトルとの位相差を求め、この位相差に基づいて物標の方向を判定する演算処理装置と
を具備することを特徴とする物標検知システム。
【請求項1】
マイクロ波信号を発生するマイクロ波発振器と、
前記マイクロ波信号を送信する送信アンテナと、
前記送信アンテナから送信された前記マイクロ波信号が物標で反射された信号を受信し受信信号を出力する受信アンテナと、
前記送信信号と前記受信信号を混合して検波し、検波信号を出力する検波手段と、
前記検波信号をA/D変換して検波データを出力するA/D変換器と、
前記検波データに基づき物標の存在の有無を判定する演算処理手段と
を具備することを特徴とする物標検知装置。
【請求項2】
マイクロ波信号を発生するマイクロ波発振器と、
前記マイクロ波信号を第1の分配信号と第2の分配信号とに分配する電力分配器と、
前記第1の分配信号を第1の基準信号と第1の送信信号とに分ける第1の方向性結合器と、
前記第2の分配信号を第2の基準信号と第2の送信信号とに分ける第2の方向性結合器と、
前記第1の送信信号と前記第2の送信信号とを結合して第3の送信信号を出力する電力結合器と、
前記第3の送信信号を送信する送信アンテナと、
前記送信アンテナから送信された前記第3の送信信号が物標で反射された信号を受信し第1の受信信号を出力する第1の受信アンテナと、
前記送信アンテナから送信された前記第3の送信信号が物標で反射された信号を受信し第2の受信信号を出力する第2の受信アンテナと、
前記第1の基準信号と前記第1の受信信号が混合して入力された信号を検波して第1の検波信号を出力する第1の検波手段と、
前記第2の基準信号と前記第2の受信信号が混合して入力された信号を検波して第2の検波信号を出力する第2の検波手段と、
前記第1の検波信号をA/D変換して第1の検波データを出力する第1のA/D変換器と、
前記第2の検波信号をA/D変換して第2の検波データを出力する第2のA/D変換器と、
物標が存在しない状態での前記第1の検波データと物標が存在する状態での前記第1の検波データとの差と、物標が存在しない状態での前記第2の検波データと物標が存在する状態での前記第2の検波データとの差を求めることにより得られる信号ベクトルの大きさに基づき物標の存在の有無を判定する演算処理手段と
を具備することを特徴とする物標検知装置。
【請求項3】
請求項1または請求項2に記載の物標検知装置を2台配置した物標検知システムであって、
物標が存在しない状態で検出される検波データと物標が存在する状態で検出される検波データとの差を求めることにより得られる第1の信号ベクトルを出力する第1の物標検知装置と、
物標が存在しない状態で検出される検波データと物標が存在する状態で検出される検波データとの差を求めることにより得られる第2の信号ベクトルを出力する第2の物標検知装置と、
前記第1の信号ベクトルと前記第2の信号ベクトルとの位相差を求め、この位相差に基づいて物標の方向を判定する演算処理装置と
を具備することを特徴とする物標検知システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2006−119129(P2006−119129A)
【公開日】平成18年5月11日(2006.5.11)
【国際特許分類】
【出願番号】特願2005−276587(P2005−276587)
【出願日】平成17年9月22日(2005.9.22)
【出願人】(504133110)国立大学法人 電気通信大学 (383)
【Fターム(参考)】
【公開日】平成18年5月11日(2006.5.11)
【国際特許分類】
【出願日】平成17年9月22日(2005.9.22)
【出願人】(504133110)国立大学法人 電気通信大学 (383)
【Fターム(参考)】
[ Back to top ]