
物標運動推定装置
【課題】自機の運動状態の変化を受けにくい運動推定結果を出力可能な物標運動推定装置を提供する。
【解決手段】レーダ装置が備える物標運動推定部6は、物標相対座標取得部61と、固定点基準物標座標取得部62と、フィルタ処理部64と、を備える。物標相対座標取得部61は、船舶に搭載され、自船を基準とした物標の相対位置を示す相対座標(Trx,Try)をレーダエコーに基づいて取得する。固定点基準物標座標取得部62は、相対座標(Trx,Try)と、自船の位置と、に基づき、固定点を基準とした物標の位置を示す固定点基準座標(Tax,Tay)を取得する。フィルタ処理部64は、固定点基準座標(Tax,Tay)を入力して物標の運動情報を推定する。
【解決手段】レーダ装置が備える物標運動推定部6は、物標相対座標取得部61と、固定点基準物標座標取得部62と、フィルタ処理部64と、を備える。物標相対座標取得部61は、船舶に搭載され、自船を基準とした物標の相対位置を示す相対座標(Trx,Try)をレーダエコーに基づいて取得する。固定点基準物標座標取得部62は、相対座標(Trx,Try)と、自船の位置と、に基づき、固定点を基準とした物標の位置を示す固定点基準座標(Tax,Tay)を取得する。フィルタ処理部64は、固定点基準座標(Tax,Tay)を入力して物標の運動情報を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、主として、探知機器で探知される物標に関する情報に基づいて、当該探知物標の運動を推定する物標運動推定装置に関する。
【背景技術】
【0002】
従来から、レーダ装置で探知された物標を追尾しつつ、当該物標の真速度及び相対速度を推定して表示する、TT(Target Tracking)乃至ARPA(Automatic Radar Plotting Aid)と呼ばれる装置が提案されている。特許文献1は、この種の物標運動推定装置を開示する。
【0003】
特許文献1で開示される物標運動推定装置では、物標の位置に関するレーダ信号、自船進路、自船速度等の入力信号に基づいて、探知物標の現時点での位置測定データが作成され、この位置測定データが運動推定部に送られる。運動推定部では、時系列的に送られてくる測定データに基づいて、探知物標の相対運動や真運動を求める。こうして得られる相対運動及び真運動の推定データは、例えばベクトル表示の形で、データ表示部に適宜出力される。
【0004】
特許文献1は、作成されて運動推定部に送られる位置測定データが各種の外乱を含んでおり、これが運動推定部での推定データの精度を悪化させることを指摘する。そして、特許文献1は、安定した推定データが得られるように、運動推定部において、カルマンフィルタやαβトラッカ等の巡回形デジタルフィルタを用いたり、移動平均を求めたりすることで、平滑化を行って外乱の影響を低減し得ることを開示している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3508000号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記特許文献1の構成において、レーダ信号から得られる物標の位置は、自船を基準とした相対位置で取り扱われる。従って、上記の運動推定部に入力される位置測定データは、探知物標自体の運動のみならず、自船の運動の影響を受ける。
【0007】
従って、例えば自船の運動状態が急激に変化した場合、位置測定データが大きく変化するために、運動推定部の推定精度を一時的に悪化させることが頻繁に生じていた。しかも、運動推定部においては上記のとおり平滑化処理を行っているため、運動推定結果の出力が時間遅れを含むこととなり、運動推定部の推定精度が回復するのにある程度の時間を要することが多かった。
【0008】
従って、特許文献1の構成は、自船が発進、停船、変針等を行ったときに、実際には停止しているはずの物標に大きな真速度が生じているような運動推定結果が出力されてユーザを混乱させる場合があり、この点で改善の余地が残されていた。
【0009】
本発明は以上の事情に鑑みてされたものであり、その目的は、自機の運動状態の変化を受けにくい運動推定結果を出力可能な物標運動推定装置を提供することにある。
【課題を解決するための手段及び効果】
【0010】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0011】
本発明の第1の観点によれば、以下の構成の物標運動推定装置が提供される。即ち、この物標運動推定装置は、物標相対位置取得部と、固定点基準物標位置取得部と、フィルタ処理部と、を備える。前記物標相対位置取得部は、移動体に搭載され、自機位置を基準とした物標の相対位置である物標相対位置をレーダエコーに基づいて取得する。前記固定点基準物標位置取得部は、前記物標相対位置と、前記自機位置と、に基づき、固定点を基準とした前記物標の位置である固定点基準物標位置を取得する。前記フィルタ処理部は、前記固定点基準物標位置を入力して物標の運動情報を推定するフィルタ処理を行う。
【0012】
これにより、フィルタ処理部には、自船の運動の影響が取り除かれた固定点基準物標位置が入力され、これが物標の運動状態の推定に用いられる。従って、フィルタ処理部の出力が時間遅れを含んでいても、自船の運動が物標の運動状態の推定に悪影響を及ぼすことを防止できるので、物標の運動状態をより高精度で推定することができる。
【0013】
前記の物標運動推定装置においては、前記フィルタ処理部で推定される物標の運動情報が、物標の針路及び速度を含むことが好ましい。
【0014】
これにより、物標の針路及び速度を正確に推定することができる。
【0015】
前記の物標運動推定装置においては、以下の構成とすることが好ましい。即ち、前記フィルタ処理部は、前回に推定した物標の運動情報と、入力された固定点基準物標位置と、に基づいて、物標の運動情報を推定する。前記フィルタ処理部は、物標の運動情報を推定するにあたって物標位置の平滑化処理を行う。前記フィルタ処理部は、推定した物標の運動情報に基づいて次回の物標位置を予測し、この次回の予測位置は、運動情報を推定すべき物標の選別に用いられ、選別された物標の前記固定点基準物標位置が当該フィルタ処理部に入力される。
【0016】
即ち、固定点基準物標位置がフィルタ処理部に入力される本発明の構成は、フィルタ処理部の出力結果が発散し易い上記のような構成(帰還入力的な構成)に対して特に有効である。
【0017】
前記の物標運動推定装置においては、前記物標相対位置取得部には、前記レーダエコーの取得方位が地球基準での方位で順次入力されることが好ましい。
【0018】
これにより、物標相対位置の計算処理を簡潔に行うことができる。
【0019】
前記の物標運動推定装置においては、前記固定点基準物標位置取得部は、GNSS航法装置から取得される位置情報に対し、GNSSアンテナ及びレーダアンテナの設置位置に基づくオフセット処理を行うことで自機位置を取得することが好ましい。
【0020】
これにより、レーダアンテナとGNSSアンテナとの設置位置が異なっていたとしても、レーダアンテナの位置を自機位置とすることができるので、物標の運動状態をより精度良く推定することができる。
【0021】
前記の物標運動推定装置においては、GNSS航法装置から取得される自機位置に応じて、前記フィルタ処理部に前記固定点基準物標位置を入力するか、前記物標相対位置を入力するか、を切り換えることが好ましい。
【0022】
これにより、GNSS航法装置による測位精度が低下し易い場所においては、固定点基準物標位置ではなく物標相対位置を運動推定に用いることで、運動状態の推定精度の悪化を抑制することができる。
【0023】
本発明の第2の観点によれば、前記の物標運動推定装置を備えるレーダ装置が提供される。
【0024】
これにより、物標の運動状態をより高精度で推定することができる有用なレーダ装置を提供することができる。
【図面の簡単な説明】
【0025】
【図1】本発明の一実施形態に係るレーダ装置の全体的な構成を示すブロック図。
【図2】物標運動推定装置の構成を示すブロック図。
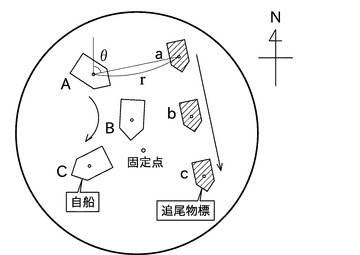
【図3】追尾物標が定速で直進する一方、自船が急旋回している場合を示す説明図。
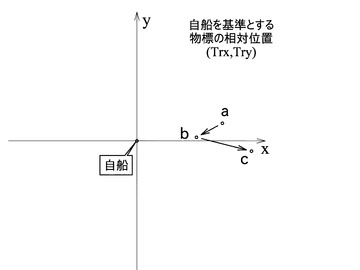
【図4】図3の例において、自船を基準とする物標の相対位置の推移を示す図。
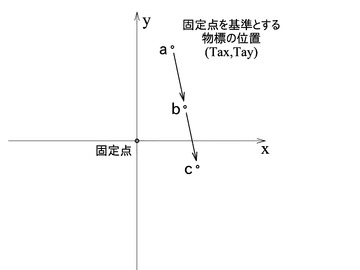
【図5】図3の例において、固定点を基準とする物標の位置の推移を示す図。
【発明を実施するための形態】
【0026】
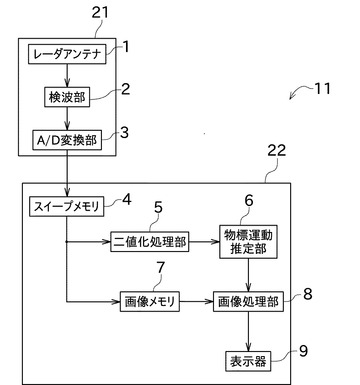
次に、図面を参照して本発明の実施の形態を説明する。図1は、本実施形態に係るレーダ装置11のブロック図である。本実施形態のレーダ装置11は、漁船等の船舶に備えられる舶用レーダであり、主に他船等の物標の探知に用いられる。
【0027】
図1に示すように、本実施形態のレーダ装置11は、アンテナユニット21と、信号処理部(信号処理装置)22と、を備えている。
【0028】
アンテナユニット21は、移動体としての船舶において所定の位置に取り付けられている。このアンテナユニット21は、レーダアンテナ1と、検波部2と、A/D変換部3と、を備えている。
【0029】
レーダアンテナ1は、指向性の強いパルス状電波を送信するとともに、物標からのエコー(反射波)を受信できるように構成されている。この構成で、レーダアンテナ1がパルス状電波を送信してからエコーを受信するまでの時間を測定することにより、自船から物標までの距離rを知ることができる。また、レーダアンテナ1は水平面内で360°回転可能に構成され、パルス状電波の送信方向を変えながら(レーダアンテナ1の角度を変化させながら)電波の送受信を繰り返し行うように構成されている。この構成により、自船周囲の平面上の物標を360°にわたり探知することができる。なお、以下の説明では、パルス状電波を送信してから次のパルス状電波を送信するまでの動作を「スイープ」と呼び、電波の送受信を行いながらレーダアンテナ1を360°回転させる動作を「スキャン」と呼ぶことがある。
【0030】
検波部2は、レーダアンテナ1が受信した信号を検波して増幅し、A/D変換部3に受信信号を出力する。
【0031】
A/D変換部3は、検波部2から入力されたアナログ形式の受信信号をサンプリングし、複数ビットからなるデジタルデータ(以下、「受信データ」と呼ぶことがある)に変換する。
【0032】
信号処理部22は、スイープメモリ4と、二値化処理部5と、物標運動推定部(物標運動推定装置、追尾処理部)6と、画像メモリ7と、画像処理部8と、表示器9と、を備えている。
【0033】
スイープメモリ4は、受信データを1スイープ分リアルタイムで記憶することができるバッファメモリである。スイープメモリ4には、1スイープの間にサンプリングされた受信データが、時系列順で記憶されている。従って、スイープメモリ4から受信データを読み出すときの読出しアドレスに基づいて、当該受信データに対応するエコー源までの距離rを求めることができる。また、図示を省略するが、レーダアンテナ1からは、当該レーダアンテナ1が船首に対して現在どの方向を向いているか(アンテナ角度α)を示すデータが出力されている。従って、スイープメモリ4から受信データを読み出す際は、当該受信データに対応するエコー源の位置を、極座標(r,α)で得ることができる。
【0034】
二値化処理部5は、スイープメモリ4の信号レベルと、所定の二値化閾値と、を比較することにより二値化を行う。具体的には、二値化処理部5は、信号レベルが二値化閾値以上の場合は「物標がある」ことを示すデータ(例えば、「1」)を出力する。一方、信号レベルが二値化閾値未満の場合は、「物標がない」ことを示すデータ(例えば、「0」)を出力する。二値化処理部5によるレーダエコーの処理結果(二値化処理済データ)は、物標運動推定部6に出力される。
【0035】
物標運動推定部6は、自船周囲に存在する物標のうち追尾すべき物標について、当該物標の位置及び運動状態(例えば、速度ベクトル)を継続的に検出及び推定し、危険な物標の報知等を行うためのものである。ここで、追尾すべき物標は、自動的に設定される場合と、ユーザがレーダ装置11を適宜操作することで特別に設定される場合と、が考えられる。追尾すべき物標の位置及び速度の情報は、画像処理部8に出力される。なお、物標運動推定部6の具体的な構成については後述する。
【0036】
画像メモリ7は、ラスタ形式の二次元画像を記憶できるように構成されている。この構成で、スイープメモリ4が出力する受信データは、当該エコーの平面上の位置を示すようにアドレスが計算された上で、当該アドレスに出力される。これにより、二次元画像上に受信データがプロットされ、結果として、自船周囲の物標の様子を示すラスタ画像形式のレーダ映像が生成される。
【0037】
画像処理部8は、画像メモリ7に記憶されたレーダ映像に対し、物標運動推定部6が出力する追尾物標の位置及び速度等のデータを重畳するように、画像の合成処理を行う。この結果、例えば、レーダ映像に追尾物標の速度ベクトルが重ね合わせられた形の合成映像を生成することができる。
【0038】
表示器9は、公知のラスタスキャン式の表示装置として構成されており、画像処理部8の処理結果を画面に表示可能に構成されている。
【0039】
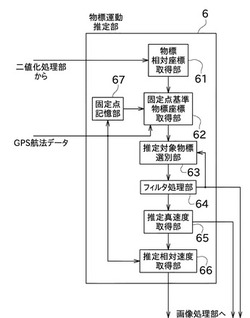
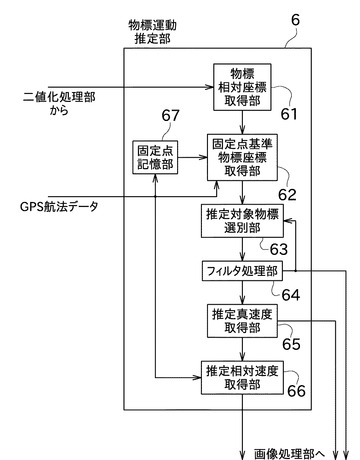
次に、図2を参照して、物標運動推定部6の詳細な構成を説明する。物標運動推定部6は、物標相対座標取得部(物標相対位置取得部)61と、固定点基準物標座標取得部(固定点基準物標位置取得部)62と、推定対象物標選別部63と、フィルタ処理部64と、推定真速度取得部65と、推定相対速度取得部66と、固定点記憶部67と、を備える。
【0040】
物標相対座標取得部61は、二値化処理部5から入力された二値化処理済データの平面上の連続性を評価し、空間的にまとまって「物標がある」と判断されているデータを抽出した上で、その代表点の座標を得る。即ち、空間的にまとまっているデータは1つの物標からのエコーを示すものと考えられるので、物標相対座標取得部61は、「物標がある」と判断された連続領域を1つの物標とみなし、その代表点の座標を、物標の位置として求める。
【0041】
なお、レーダアンテナ1の向きを示すアンテナ角度αは、船首を基準とした相対角度で表されている。一方で、前記レーダアンテナ1には図示しない方位センサが取り付けられており、レーダアンテナ1が現在どの方向を向いているかを示すデータを、地球基準の方位(θ)で出力することもできるようになっている。従って、処理したスイープに関するアンテナ角度θは、物標が自船に対して、地球基準でどの方位にあるかを表すものということができる。
【0042】
物標相対座標取得部61は、物標の自船からの距離rと、物標の地球基準の方位θと、を用いて表された極座標(r,θ)に基づき、XY座標系で表した物標の相対位置(Trx,Try)を得る。具体的には、Trx,Tryは、以下の式で求められる。
Trx=rsinθ
Try=rcosθ
こうして得られた物標の相対座標(Trx,Try)は、自船を原点とし、Y軸が北を向くXY座標平面上での物標の位置として表すことができる。物標相対座標取得部61は、取得した物標の相対座標(Trx,Try)の情報を、固定点基準物標座標取得部62へ出力する。
【0043】
固定点基準物標座標取得部62は、GPS航法装置から取得した自船の位置情報(経度及び緯度)に基づき、物標相対座標取得部61から入力した物標の相対座標(Trx,Try)を、適当な固定点を基準とした座標(Tax,Tay)に変換する。
【0044】
固定点はどのように決定しても良いが、本実施形態では、レーダ装置11に電源を投入したときにGPS航法装置から取得した自船の位置を、前記固定点として採用している。一度設定された固定点の経度及び緯度は、物標運動推定部6が備える固定点記憶部67に記憶され、この固定点の位置が原則として移動することはない。ただし、例えば追尾すべき物標がいったん無くなった場合は、固定点が当該タイミングにおける自船の位置となるように更新し、固定点記憶部67に再記憶させても良い。
【0045】
固定点基準物標座標取得部62は、現時点での自船の経度及び緯度をGPS航法装置から取得した上で、前記固定点を基準としたときに自船がどの位置にいるかを計算する。この結果、固定点を原点とし、Y軸が北を向くXY座標平面上での自船の位置(Lx,Ly)を取得することができる。そして固定点基準物標座標取得部62は、この自船の位置(Lx,Ly)と、前記物標の自船に対する相対座標(Trx,Try)と、に基づき、固定点を原点とし、Y軸が北を向くXY座標平面上での物標の座標(Tax,Tay)を得ることができる。
【0046】
具体的には、Tax及びTayは、以下の式で求められる。
Tax=Trx+Lx
Tay=Try+Ly
固定点基準物標座標取得部62は、こうして得られた物標の座標(Tax,Tay)を、推定対象物標選別部63に出力する。
【0047】
推定対象物標選別部63は、固定点基準物標座標取得部62から出力される物標の座標(Tax,Tay)のうち、追尾すべき物標に係るものだけを選別して、その座標をフィルタ処理部64に出力する。この推定対象物標選別部63には、後段のフィルタ処理部64が出力した、追尾物標の予測位置が入力されるようになっている。推定対象物標選別部63は、追尾物標の予測位置にマッチする物標のみを抽出し、当該物標の固定点基準座標(Tax,Tay)をフィルタ処理部64へ出力する。
【0048】
フィルタ処理部64は、推定対象物標選別部63から入力された物標の座標から、追尾物標の移動方向(針路)や移動速度等の運動情報を推定する。このフィルタ処理部64としては、例えば公知のαβトラッカーやカルマンフィルタを用いることができる。
【0049】
フィルタ処理部64は、前回のスキャンで得られた追尾物標の推定移動位置と、推定対象物標選別部63で得られた今回の物標の位置と、を用いて、追尾物標の推定位置を算出する。この際、安定した推定位置が算出されるように、公知のαβトラッカーやカルマンフィルタ等の巡回形のデジタルフィルタを用いたり、移動平均を求めたりすることで、推定位置の平滑化を行っている。
【0050】
フィルタ処理部64は、こうして得られた追尾物標の推定位置を、前記画像処理部8へ出力する。また、フィルタ処理部64は、追尾物標の移動速度を計算により取得する。この追尾物標の移動速度は、今回の推定位置と前回の推定位置との差を求め、この差をその変化に要した時間で除算することにより得ることができる。こうして得られた追尾物標の移動速度は、推定真速度取得部65に出力される。
【0051】
更に、フィルタ処理部64は、上記の追尾物標の位置及び移動速度等に基づいて、次回スキャン時における追尾物標の予測位置を計算する。この予測位置は推定対象物標選別部63に出力され、追尾物標の物標の選別に用いられる。
【0052】
推定真速度取得部65は、フィルタ処理部64から入力される追尾物標の移動速度を、追尾物標の真速度として取得する。即ち、フィルタ処理部64に入力される物標の座標(Tax,Tay)は、上述のとおり自船ではなく固定点を基準とするものである。従って、推定真速度取得部65は、上記のようにしてフィルタ処理部64が追尾物標の推定位置から計算した移動速度を、そのまま追尾物標の真速度として採用することができる。推定真速度取得部65は、こうして取得した追尾物標の真速度及び針路を、推定相対速度取得部66及び画像処理部8へ出力する。
【0053】
推定相対速度取得部66は、推定真速度取得部65から得られた追尾物標の真速度から、GPS航法データより得られる自船の速度を減算することで、自船に対する追尾物標の相対速度を得る。推定相対速度取得部66は、こうして得られた追尾物標の相対速度を、画像処理部8へ出力する。
【0054】
以下、上記のように追尾物標の速度を推定する効果について、例を示して説明する。
【0055】
図3に示すように、海上で自船がA→B→Cと旋回しながら進んでいる間に、追尾物標が定速でa→b→cと直進したとする。この例で、物標相対座標取得部61が計算する物標の相対座標(Trx,Try)は、図4のように表される。この図4に示すように、追尾物標は実際には定速で直進しているにもかかわらず、その相対座標(Trx,Try)は自船の旋回運動の影響を大きく受け、ジグザグに移動するような軌跡を描く。
【0056】
従来の構成では、上述のとおり、この相対座標(Trx,Try)が平滑処理部(カルマンフィルタやαβトラッカ等)に入力されていた。従って、平滑処理部の出力結果は追尾物標の自船に対する相対速度となり、これに自船の速度を加算することで追尾物標の真速度を取得していた。しかしながら、上記の平滑処理部の出力は時間遅れを含むために、自船の運動が平滑処理部の出力に十分反映されるまでの間は、その応答遅れの分だけ真速度の推定精度が低下してしまっていた。また、自船の運動が急激に変化した場合は、平滑処理部の出力が安定するまでにある程度の時間を要し、いわゆるオーバーシュートによって真速度の推定精度が低下することも多かった。
【0057】
この点、本実施形態では、固定点基準物標座標取得部62が計算する固定点基準座標(Tax,Tay)が、フィルタ処理部64に入力される。従って、追尾物標の位置は、自船の運動による影響が事前に取り除かれた形で、フィルタ処理部64に入力されることになる。これにより、フィルタ処理部64の出力が時間遅れを含んでいても、自船の運動が物標の運動情報の推定に悪影響を及ぼすことを防止できるので、追尾物標の運動情報をより高精度で推定することができる。
【0058】
なお、本実施形態では、フィルタ処理部64が現在の物標の位置に基づいて追尾物標の位置を予測し、この予測された物標の位置が推定対象物標選別部63による物標の選別に用いられ、選別された物標の位置がフィルタ処理部64に入力される関係(いわゆる帰還入力的な関係)になっている。このような構成では、フィルタ処理部64に入力される物標位置に大きな乱れが生じた場合、フィルタ処理部64の出力が発散してしまい、収束するまでにある程度の時間を要することが多い。従って、自船の運動の影響が予め除去された位置情報である固定点基準座標(Tax,Tay)がフィルタ処理部64に入力されるように構成することが、特に有利であるということができる。
【0059】
次に、前述の二値化処理部5から物標相対座標取得部61に出力される二値化処理済データについて説明する。この二値化処理済データは極座標で表されるが、その偏角として、レーダアンテナ1の船首基準での角度αを用いる場合と、レーダアンテナ1の地球基準での方位θを用いる場合と、の2通りが考えられる。
【0060】
この点、本実施形態では、物標相対座標取得部61は、物標の自船からの距離rと、物標の地球基準の方位θと、を用いて表された極座標(r,θ)に基づき、物標の相対座標(Trx,Try)を求めている。こうすることにより、例えば方位センサの検出結果に基づいて船首基準での角度αから地球基準の方位θへ変換するような処理が不要になるので、処理を簡潔にできるとともに、例えば自船が急旋回した際に、船首基準での角度αから地球基準の方位θへ変換する処理の遅れによって、方位θの精度が低下することを防止できる。
【0061】
次に、固定点基準物標座標取得部62がGPS航法データに基づいて取得する自船位置について説明する。GPS航法装置から位置情報(経度及び緯度)を取得する場合、その位置情報が示すのはGPSアンテナの位置である。一方、レーダ装置11はレーダアンテナ1から電波の送受信を行うのであり、船舶において、当該レーダアンテナ1とGPSアンテナの設置場所が平面視で一致しているとは限らない。
【0062】
レーダアンテナ1とGPSアンテナの位置の差異は、固定点基準物標座標取得部62が取得する固定点基準座標(Tax,Tay)の精度に悪影響を及ぼす。この点を考慮して、本実施形態では、レーダアンテナ1とGPSアンテナの位置関係を示す情報を別途記憶しておき、GPS航法装置から得た位置情報に対して上記位置関係に基づくオフセット処理を行うことで、自船位置がレーダアンテナ1の位置を正確に示すようにすることもできるようになっている。これにより、追尾物標の運動状態をより正確に推定することができる。
【0063】
以上に示すように、本実施形態の信号処理部22が備える物標運動推定部6は、物標相対座標取得部61と、固定点基準物標座標取得部62と、フィルタ処理部64と、を備える。物標相対座標取得部61は、船舶に搭載され、自船を基準とした物標の相対位置を示す相対座標(Trx,Try)をレーダエコーに基づいて取得する。固定点基準物標座標取得部62は、相対座標(Trx,Try)と、自船の位置と、に基づき、固定点を基準とした物標の位置を示す固定点基準座標(Tax,Tay)を取得する。フィルタ処理部64は、固定点基準座標(Tax,Tay)を入力して物標の運動情報を推定する。
【0064】
これにより、フィルタ処理部64には、自船の運動の影響が取り除かれた固定点基準座標(Tax,Tay)が入力され、これが物標の運動状態の推定に用いられる。従って、フィルタ処理部64の出力が時間遅れを含んでいても、自船の運動が物標の運動状態の推定に悪影響を及ぼすことを防止できるので、追尾物標の運動状態をより高精度で推定することができる。この結果、より正確な危険予測が可能になる。
【0065】
また、本実施形態の物標運動推定部6においては、フィルタ処理部64で推定される物標の運動情報が、物標の針路及び速度を含む。
【0066】
これにより、追尾物標の針路及び速度を正確に推定することができる。
【0067】
また、本実施形態の物標運動推定部6において、フィルタ処理部64は、前回に推定した物標の運動情報と、入力された固定点基準座標(Tax,Tay)と、に基づいて、物標の運動情報を推定する。また、フィルタ処理部64は、物標の運動情報を推定するにあたって、物標位置の平滑化処理を行う。そして、フィルタ処理部64は、推定した物標の運動情報に基づいて次回の物標位置を予測し、この予測された物標位置は、推定対象物標選別部63において運動情報を推定すべき物標を選別するのに用いられ、選別された物標の固定点基準座標(Tax,Tay)が当該フィルタ処理部64に入力される。
【0068】
即ち、物標の相対座標(Trx,Try)ではなく固定点基準座標(Tax,Tay)がフィルタ処理部64に入力される本実施形態の構成は、フィルタ処理部64の出力結果が発散し易い上記のような構成(帰還入力的な構成)に対して特に有効である。
【0069】
また、本実施形態の物標運動推定部6において、物標相対座標取得部61には、レーダエコーの取得方位が地球基準の方位(θ)で順次入力される。
【0070】
これにより、物標の相対座標(Trx,Try)の計算処理を簡潔に行うことができる。
【0071】
また、本実施形態の物標運動推定部6において、固定点基準物標座標取得部62は、GPS航法装置から取得される位置情報に対し、GPSアンテナ及びレーダアンテナ1の設置位置に基づくオフセット処理を行うことで自機位置を取得することもできるように構成されている。
【0072】
これにより、レーダアンテナ1とGPSアンテナとの設置位置が異なっていたとしても、レーダアンテナ1の位置を自機位置とすることができるので、物標の運動状態をより精度良く推定することができる。
【0073】
次に、上記実施形態の変形例を説明する。この変形例においては、GPSアンテナから得られる位置情報が示す自船の位置に応じて、フィルタ処理部64に物標の固定点基準座標(Tax,Tay)を入力するか、相対座標(Trx,Try)を入力するか、を切り換えるものである。
【0074】
即ち、高緯度においては、GPS航法装置より得られる位置情報の精度が低下することが多いため、固定点基準座標(Tax,Tay)の精度が低下して、物標の運動状態の推定精度が却って悪化するおそれがある。本変形例ではこの事情を考慮し、GPS航法装置より得られる自船の位置が北側の境界線(例えば、北緯85度)を越えて北に移動したとき、又は、南側の境界線(例えば、南緯85度)を越えて南に移動したときは、フィルタ処理部64に固定点基準座標(Tax,Tay)を入力させず、代わりに、従来と同様に相対座標(Trx,Try)を入力させるようになっている。
【0075】
フィルタ処理部64に相対座標(Trx,Try)が入力された場合は、フィルタ処理部64が推定する物標速度も相対速度になる。従って、この場合、推定真速度取得部65は、フィルタ処理部64が出力する相対速度に自船の速度を加算することで、物標の真速度を取得すれば良い。一方、推定相対速度取得部66は、フィルタ処理部64が出力する相対速度を、そのまま物標の相対速度として得ることとすれば良い。
【0076】
また、勿論、自船が高緯度の領域を脱した場合は、フィルタ処理部64に固定点基準座標(Tax,Tay)を再び入力させるようにすれば良い。なお、この復帰の判断(相対座標から固定点基準座標に戻す判断)の境界線は、固定点基準座標から相対座標に移行する場合の境界線と同一とせず若干異ならせて、ヒステリシス的な判断とすることが好ましい。ここでは、復帰させる場合の境界線を、(北緯85度及び南緯85度ではなく)例えば北緯80度及び南緯80度とすることが考えられる。
【0077】
以上に示すように、本変形例の物標運動推定部は、GPS航法装置から取得される自船の位置に応じて、フィルタ処理部64に固定点基準座標(Tax,Tay)を入力するか、相対座標(Trx,Try)を入力するか、を切り換える。
【0078】
これにより、GNSS航法装置による測位精度が低下し易い場所においては、固定点基準座標ではなく相対座標を運動推定に用いることで、運動状態の推定精度の悪化を抑制することができる。
【0079】
以上に本発明の好適な実施の形態を説明したが、上記の構成は例えば以下のように変更することができる。
【0080】
上記実施形態では、GNSSの一例としてGPSを用いた航法装置が用いられているが、他のGNSS航法装置を用いる構成であっても良いことは勿論である。
【0081】
本発明の物標運動推定装置は、船舶に限らず、飛行機、自動車等の任意の移動体に搭載することができる。
【符号の説明】
【0082】
6 物標運動推定部(物標運動推定装置)
11 レーダ装置
61 物標相対座標取得部(物標相対位置取得部)
62 固定点基準物標座標取得部(固定点基準物標位置取得部)
64 フィルタ処理部
65 推定真速度取得部(物標真速度取得部)
【技術分野】
【0001】
本発明は、主として、探知機器で探知される物標に関する情報に基づいて、当該探知物標の運動を推定する物標運動推定装置に関する。
【背景技術】
【0002】
従来から、レーダ装置で探知された物標を追尾しつつ、当該物標の真速度及び相対速度を推定して表示する、TT(Target Tracking)乃至ARPA(Automatic Radar Plotting Aid)と呼ばれる装置が提案されている。特許文献1は、この種の物標運動推定装置を開示する。
【0003】
特許文献1で開示される物標運動推定装置では、物標の位置に関するレーダ信号、自船進路、自船速度等の入力信号に基づいて、探知物標の現時点での位置測定データが作成され、この位置測定データが運動推定部に送られる。運動推定部では、時系列的に送られてくる測定データに基づいて、探知物標の相対運動や真運動を求める。こうして得られる相対運動及び真運動の推定データは、例えばベクトル表示の形で、データ表示部に適宜出力される。
【0004】
特許文献1は、作成されて運動推定部に送られる位置測定データが各種の外乱を含んでおり、これが運動推定部での推定データの精度を悪化させることを指摘する。そして、特許文献1は、安定した推定データが得られるように、運動推定部において、カルマンフィルタやαβトラッカ等の巡回形デジタルフィルタを用いたり、移動平均を求めたりすることで、平滑化を行って外乱の影響を低減し得ることを開示している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3508000号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記特許文献1の構成において、レーダ信号から得られる物標の位置は、自船を基準とした相対位置で取り扱われる。従って、上記の運動推定部に入力される位置測定データは、探知物標自体の運動のみならず、自船の運動の影響を受ける。
【0007】
従って、例えば自船の運動状態が急激に変化した場合、位置測定データが大きく変化するために、運動推定部の推定精度を一時的に悪化させることが頻繁に生じていた。しかも、運動推定部においては上記のとおり平滑化処理を行っているため、運動推定結果の出力が時間遅れを含むこととなり、運動推定部の推定精度が回復するのにある程度の時間を要することが多かった。
【0008】
従って、特許文献1の構成は、自船が発進、停船、変針等を行ったときに、実際には停止しているはずの物標に大きな真速度が生じているような運動推定結果が出力されてユーザを混乱させる場合があり、この点で改善の余地が残されていた。
【0009】
本発明は以上の事情に鑑みてされたものであり、その目的は、自機の運動状態の変化を受けにくい運動推定結果を出力可能な物標運動推定装置を提供することにある。
【課題を解決するための手段及び効果】
【0010】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0011】
本発明の第1の観点によれば、以下の構成の物標運動推定装置が提供される。即ち、この物標運動推定装置は、物標相対位置取得部と、固定点基準物標位置取得部と、フィルタ処理部と、を備える。前記物標相対位置取得部は、移動体に搭載され、自機位置を基準とした物標の相対位置である物標相対位置をレーダエコーに基づいて取得する。前記固定点基準物標位置取得部は、前記物標相対位置と、前記自機位置と、に基づき、固定点を基準とした前記物標の位置である固定点基準物標位置を取得する。前記フィルタ処理部は、前記固定点基準物標位置を入力して物標の運動情報を推定するフィルタ処理を行う。
【0012】
これにより、フィルタ処理部には、自船の運動の影響が取り除かれた固定点基準物標位置が入力され、これが物標の運動状態の推定に用いられる。従って、フィルタ処理部の出力が時間遅れを含んでいても、自船の運動が物標の運動状態の推定に悪影響を及ぼすことを防止できるので、物標の運動状態をより高精度で推定することができる。
【0013】
前記の物標運動推定装置においては、前記フィルタ処理部で推定される物標の運動情報が、物標の針路及び速度を含むことが好ましい。
【0014】
これにより、物標の針路及び速度を正確に推定することができる。
【0015】
前記の物標運動推定装置においては、以下の構成とすることが好ましい。即ち、前記フィルタ処理部は、前回に推定した物標の運動情報と、入力された固定点基準物標位置と、に基づいて、物標の運動情報を推定する。前記フィルタ処理部は、物標の運動情報を推定するにあたって物標位置の平滑化処理を行う。前記フィルタ処理部は、推定した物標の運動情報に基づいて次回の物標位置を予測し、この次回の予測位置は、運動情報を推定すべき物標の選別に用いられ、選別された物標の前記固定点基準物標位置が当該フィルタ処理部に入力される。
【0016】
即ち、固定点基準物標位置がフィルタ処理部に入力される本発明の構成は、フィルタ処理部の出力結果が発散し易い上記のような構成(帰還入力的な構成)に対して特に有効である。
【0017】
前記の物標運動推定装置においては、前記物標相対位置取得部には、前記レーダエコーの取得方位が地球基準での方位で順次入力されることが好ましい。
【0018】
これにより、物標相対位置の計算処理を簡潔に行うことができる。
【0019】
前記の物標運動推定装置においては、前記固定点基準物標位置取得部は、GNSS航法装置から取得される位置情報に対し、GNSSアンテナ及びレーダアンテナの設置位置に基づくオフセット処理を行うことで自機位置を取得することが好ましい。
【0020】
これにより、レーダアンテナとGNSSアンテナとの設置位置が異なっていたとしても、レーダアンテナの位置を自機位置とすることができるので、物標の運動状態をより精度良く推定することができる。
【0021】
前記の物標運動推定装置においては、GNSS航法装置から取得される自機位置に応じて、前記フィルタ処理部に前記固定点基準物標位置を入力するか、前記物標相対位置を入力するか、を切り換えることが好ましい。
【0022】
これにより、GNSS航法装置による測位精度が低下し易い場所においては、固定点基準物標位置ではなく物標相対位置を運動推定に用いることで、運動状態の推定精度の悪化を抑制することができる。
【0023】
本発明の第2の観点によれば、前記の物標運動推定装置を備えるレーダ装置が提供される。
【0024】
これにより、物標の運動状態をより高精度で推定することができる有用なレーダ装置を提供することができる。
【図面の簡単な説明】
【0025】
【図1】本発明の一実施形態に係るレーダ装置の全体的な構成を示すブロック図。
【図2】物標運動推定装置の構成を示すブロック図。
【図3】追尾物標が定速で直進する一方、自船が急旋回している場合を示す説明図。
【図4】図3の例において、自船を基準とする物標の相対位置の推移を示す図。
【図5】図3の例において、固定点を基準とする物標の位置の推移を示す図。
【発明を実施するための形態】
【0026】
次に、図面を参照して本発明の実施の形態を説明する。図1は、本実施形態に係るレーダ装置11のブロック図である。本実施形態のレーダ装置11は、漁船等の船舶に備えられる舶用レーダであり、主に他船等の物標の探知に用いられる。
【0027】
図1に示すように、本実施形態のレーダ装置11は、アンテナユニット21と、信号処理部(信号処理装置)22と、を備えている。
【0028】
アンテナユニット21は、移動体としての船舶において所定の位置に取り付けられている。このアンテナユニット21は、レーダアンテナ1と、検波部2と、A/D変換部3と、を備えている。
【0029】
レーダアンテナ1は、指向性の強いパルス状電波を送信するとともに、物標からのエコー(反射波)を受信できるように構成されている。この構成で、レーダアンテナ1がパルス状電波を送信してからエコーを受信するまでの時間を測定することにより、自船から物標までの距離rを知ることができる。また、レーダアンテナ1は水平面内で360°回転可能に構成され、パルス状電波の送信方向を変えながら(レーダアンテナ1の角度を変化させながら)電波の送受信を繰り返し行うように構成されている。この構成により、自船周囲の平面上の物標を360°にわたり探知することができる。なお、以下の説明では、パルス状電波を送信してから次のパルス状電波を送信するまでの動作を「スイープ」と呼び、電波の送受信を行いながらレーダアンテナ1を360°回転させる動作を「スキャン」と呼ぶことがある。
【0030】
検波部2は、レーダアンテナ1が受信した信号を検波して増幅し、A/D変換部3に受信信号を出力する。
【0031】
A/D変換部3は、検波部2から入力されたアナログ形式の受信信号をサンプリングし、複数ビットからなるデジタルデータ(以下、「受信データ」と呼ぶことがある)に変換する。
【0032】
信号処理部22は、スイープメモリ4と、二値化処理部5と、物標運動推定部(物標運動推定装置、追尾処理部)6と、画像メモリ7と、画像処理部8と、表示器9と、を備えている。
【0033】
スイープメモリ4は、受信データを1スイープ分リアルタイムで記憶することができるバッファメモリである。スイープメモリ4には、1スイープの間にサンプリングされた受信データが、時系列順で記憶されている。従って、スイープメモリ4から受信データを読み出すときの読出しアドレスに基づいて、当該受信データに対応するエコー源までの距離rを求めることができる。また、図示を省略するが、レーダアンテナ1からは、当該レーダアンテナ1が船首に対して現在どの方向を向いているか(アンテナ角度α)を示すデータが出力されている。従って、スイープメモリ4から受信データを読み出す際は、当該受信データに対応するエコー源の位置を、極座標(r,α)で得ることができる。
【0034】
二値化処理部5は、スイープメモリ4の信号レベルと、所定の二値化閾値と、を比較することにより二値化を行う。具体的には、二値化処理部5は、信号レベルが二値化閾値以上の場合は「物標がある」ことを示すデータ(例えば、「1」)を出力する。一方、信号レベルが二値化閾値未満の場合は、「物標がない」ことを示すデータ(例えば、「0」)を出力する。二値化処理部5によるレーダエコーの処理結果(二値化処理済データ)は、物標運動推定部6に出力される。
【0035】
物標運動推定部6は、自船周囲に存在する物標のうち追尾すべき物標について、当該物標の位置及び運動状態(例えば、速度ベクトル)を継続的に検出及び推定し、危険な物標の報知等を行うためのものである。ここで、追尾すべき物標は、自動的に設定される場合と、ユーザがレーダ装置11を適宜操作することで特別に設定される場合と、が考えられる。追尾すべき物標の位置及び速度の情報は、画像処理部8に出力される。なお、物標運動推定部6の具体的な構成については後述する。
【0036】
画像メモリ7は、ラスタ形式の二次元画像を記憶できるように構成されている。この構成で、スイープメモリ4が出力する受信データは、当該エコーの平面上の位置を示すようにアドレスが計算された上で、当該アドレスに出力される。これにより、二次元画像上に受信データがプロットされ、結果として、自船周囲の物標の様子を示すラスタ画像形式のレーダ映像が生成される。
【0037】
画像処理部8は、画像メモリ7に記憶されたレーダ映像に対し、物標運動推定部6が出力する追尾物標の位置及び速度等のデータを重畳するように、画像の合成処理を行う。この結果、例えば、レーダ映像に追尾物標の速度ベクトルが重ね合わせられた形の合成映像を生成することができる。
【0038】
表示器9は、公知のラスタスキャン式の表示装置として構成されており、画像処理部8の処理結果を画面に表示可能に構成されている。
【0039】
次に、図2を参照して、物標運動推定部6の詳細な構成を説明する。物標運動推定部6は、物標相対座標取得部(物標相対位置取得部)61と、固定点基準物標座標取得部(固定点基準物標位置取得部)62と、推定対象物標選別部63と、フィルタ処理部64と、推定真速度取得部65と、推定相対速度取得部66と、固定点記憶部67と、を備える。
【0040】
物標相対座標取得部61は、二値化処理部5から入力された二値化処理済データの平面上の連続性を評価し、空間的にまとまって「物標がある」と判断されているデータを抽出した上で、その代表点の座標を得る。即ち、空間的にまとまっているデータは1つの物標からのエコーを示すものと考えられるので、物標相対座標取得部61は、「物標がある」と判断された連続領域を1つの物標とみなし、その代表点の座標を、物標の位置として求める。
【0041】
なお、レーダアンテナ1の向きを示すアンテナ角度αは、船首を基準とした相対角度で表されている。一方で、前記レーダアンテナ1には図示しない方位センサが取り付けられており、レーダアンテナ1が現在どの方向を向いているかを示すデータを、地球基準の方位(θ)で出力することもできるようになっている。従って、処理したスイープに関するアンテナ角度θは、物標が自船に対して、地球基準でどの方位にあるかを表すものということができる。
【0042】
物標相対座標取得部61は、物標の自船からの距離rと、物標の地球基準の方位θと、を用いて表された極座標(r,θ)に基づき、XY座標系で表した物標の相対位置(Trx,Try)を得る。具体的には、Trx,Tryは、以下の式で求められる。
Trx=rsinθ
Try=rcosθ
こうして得られた物標の相対座標(Trx,Try)は、自船を原点とし、Y軸が北を向くXY座標平面上での物標の位置として表すことができる。物標相対座標取得部61は、取得した物標の相対座標(Trx,Try)の情報を、固定点基準物標座標取得部62へ出力する。
【0043】
固定点基準物標座標取得部62は、GPS航法装置から取得した自船の位置情報(経度及び緯度)に基づき、物標相対座標取得部61から入力した物標の相対座標(Trx,Try)を、適当な固定点を基準とした座標(Tax,Tay)に変換する。
【0044】
固定点はどのように決定しても良いが、本実施形態では、レーダ装置11に電源を投入したときにGPS航法装置から取得した自船の位置を、前記固定点として採用している。一度設定された固定点の経度及び緯度は、物標運動推定部6が備える固定点記憶部67に記憶され、この固定点の位置が原則として移動することはない。ただし、例えば追尾すべき物標がいったん無くなった場合は、固定点が当該タイミングにおける自船の位置となるように更新し、固定点記憶部67に再記憶させても良い。
【0045】
固定点基準物標座標取得部62は、現時点での自船の経度及び緯度をGPS航法装置から取得した上で、前記固定点を基準としたときに自船がどの位置にいるかを計算する。この結果、固定点を原点とし、Y軸が北を向くXY座標平面上での自船の位置(Lx,Ly)を取得することができる。そして固定点基準物標座標取得部62は、この自船の位置(Lx,Ly)と、前記物標の自船に対する相対座標(Trx,Try)と、に基づき、固定点を原点とし、Y軸が北を向くXY座標平面上での物標の座標(Tax,Tay)を得ることができる。
【0046】
具体的には、Tax及びTayは、以下の式で求められる。
Tax=Trx+Lx
Tay=Try+Ly
固定点基準物標座標取得部62は、こうして得られた物標の座標(Tax,Tay)を、推定対象物標選別部63に出力する。
【0047】
推定対象物標選別部63は、固定点基準物標座標取得部62から出力される物標の座標(Tax,Tay)のうち、追尾すべき物標に係るものだけを選別して、その座標をフィルタ処理部64に出力する。この推定対象物標選別部63には、後段のフィルタ処理部64が出力した、追尾物標の予測位置が入力されるようになっている。推定対象物標選別部63は、追尾物標の予測位置にマッチする物標のみを抽出し、当該物標の固定点基準座標(Tax,Tay)をフィルタ処理部64へ出力する。
【0048】
フィルタ処理部64は、推定対象物標選別部63から入力された物標の座標から、追尾物標の移動方向(針路)や移動速度等の運動情報を推定する。このフィルタ処理部64としては、例えば公知のαβトラッカーやカルマンフィルタを用いることができる。
【0049】
フィルタ処理部64は、前回のスキャンで得られた追尾物標の推定移動位置と、推定対象物標選別部63で得られた今回の物標の位置と、を用いて、追尾物標の推定位置を算出する。この際、安定した推定位置が算出されるように、公知のαβトラッカーやカルマンフィルタ等の巡回形のデジタルフィルタを用いたり、移動平均を求めたりすることで、推定位置の平滑化を行っている。
【0050】
フィルタ処理部64は、こうして得られた追尾物標の推定位置を、前記画像処理部8へ出力する。また、フィルタ処理部64は、追尾物標の移動速度を計算により取得する。この追尾物標の移動速度は、今回の推定位置と前回の推定位置との差を求め、この差をその変化に要した時間で除算することにより得ることができる。こうして得られた追尾物標の移動速度は、推定真速度取得部65に出力される。
【0051】
更に、フィルタ処理部64は、上記の追尾物標の位置及び移動速度等に基づいて、次回スキャン時における追尾物標の予測位置を計算する。この予測位置は推定対象物標選別部63に出力され、追尾物標の物標の選別に用いられる。
【0052】
推定真速度取得部65は、フィルタ処理部64から入力される追尾物標の移動速度を、追尾物標の真速度として取得する。即ち、フィルタ処理部64に入力される物標の座標(Tax,Tay)は、上述のとおり自船ではなく固定点を基準とするものである。従って、推定真速度取得部65は、上記のようにしてフィルタ処理部64が追尾物標の推定位置から計算した移動速度を、そのまま追尾物標の真速度として採用することができる。推定真速度取得部65は、こうして取得した追尾物標の真速度及び針路を、推定相対速度取得部66及び画像処理部8へ出力する。
【0053】
推定相対速度取得部66は、推定真速度取得部65から得られた追尾物標の真速度から、GPS航法データより得られる自船の速度を減算することで、自船に対する追尾物標の相対速度を得る。推定相対速度取得部66は、こうして得られた追尾物標の相対速度を、画像処理部8へ出力する。
【0054】
以下、上記のように追尾物標の速度を推定する効果について、例を示して説明する。
【0055】
図3に示すように、海上で自船がA→B→Cと旋回しながら進んでいる間に、追尾物標が定速でa→b→cと直進したとする。この例で、物標相対座標取得部61が計算する物標の相対座標(Trx,Try)は、図4のように表される。この図4に示すように、追尾物標は実際には定速で直進しているにもかかわらず、その相対座標(Trx,Try)は自船の旋回運動の影響を大きく受け、ジグザグに移動するような軌跡を描く。
【0056】
従来の構成では、上述のとおり、この相対座標(Trx,Try)が平滑処理部(カルマンフィルタやαβトラッカ等)に入力されていた。従って、平滑処理部の出力結果は追尾物標の自船に対する相対速度となり、これに自船の速度を加算することで追尾物標の真速度を取得していた。しかしながら、上記の平滑処理部の出力は時間遅れを含むために、自船の運動が平滑処理部の出力に十分反映されるまでの間は、その応答遅れの分だけ真速度の推定精度が低下してしまっていた。また、自船の運動が急激に変化した場合は、平滑処理部の出力が安定するまでにある程度の時間を要し、いわゆるオーバーシュートによって真速度の推定精度が低下することも多かった。
【0057】
この点、本実施形態では、固定点基準物標座標取得部62が計算する固定点基準座標(Tax,Tay)が、フィルタ処理部64に入力される。従って、追尾物標の位置は、自船の運動による影響が事前に取り除かれた形で、フィルタ処理部64に入力されることになる。これにより、フィルタ処理部64の出力が時間遅れを含んでいても、自船の運動が物標の運動情報の推定に悪影響を及ぼすことを防止できるので、追尾物標の運動情報をより高精度で推定することができる。
【0058】
なお、本実施形態では、フィルタ処理部64が現在の物標の位置に基づいて追尾物標の位置を予測し、この予測された物標の位置が推定対象物標選別部63による物標の選別に用いられ、選別された物標の位置がフィルタ処理部64に入力される関係(いわゆる帰還入力的な関係)になっている。このような構成では、フィルタ処理部64に入力される物標位置に大きな乱れが生じた場合、フィルタ処理部64の出力が発散してしまい、収束するまでにある程度の時間を要することが多い。従って、自船の運動の影響が予め除去された位置情報である固定点基準座標(Tax,Tay)がフィルタ処理部64に入力されるように構成することが、特に有利であるということができる。
【0059】
次に、前述の二値化処理部5から物標相対座標取得部61に出力される二値化処理済データについて説明する。この二値化処理済データは極座標で表されるが、その偏角として、レーダアンテナ1の船首基準での角度αを用いる場合と、レーダアンテナ1の地球基準での方位θを用いる場合と、の2通りが考えられる。
【0060】
この点、本実施形態では、物標相対座標取得部61は、物標の自船からの距離rと、物標の地球基準の方位θと、を用いて表された極座標(r,θ)に基づき、物標の相対座標(Trx,Try)を求めている。こうすることにより、例えば方位センサの検出結果に基づいて船首基準での角度αから地球基準の方位θへ変換するような処理が不要になるので、処理を簡潔にできるとともに、例えば自船が急旋回した際に、船首基準での角度αから地球基準の方位θへ変換する処理の遅れによって、方位θの精度が低下することを防止できる。
【0061】
次に、固定点基準物標座標取得部62がGPS航法データに基づいて取得する自船位置について説明する。GPS航法装置から位置情報(経度及び緯度)を取得する場合、その位置情報が示すのはGPSアンテナの位置である。一方、レーダ装置11はレーダアンテナ1から電波の送受信を行うのであり、船舶において、当該レーダアンテナ1とGPSアンテナの設置場所が平面視で一致しているとは限らない。
【0062】
レーダアンテナ1とGPSアンテナの位置の差異は、固定点基準物標座標取得部62が取得する固定点基準座標(Tax,Tay)の精度に悪影響を及ぼす。この点を考慮して、本実施形態では、レーダアンテナ1とGPSアンテナの位置関係を示す情報を別途記憶しておき、GPS航法装置から得た位置情報に対して上記位置関係に基づくオフセット処理を行うことで、自船位置がレーダアンテナ1の位置を正確に示すようにすることもできるようになっている。これにより、追尾物標の運動状態をより正確に推定することができる。
【0063】
以上に示すように、本実施形態の信号処理部22が備える物標運動推定部6は、物標相対座標取得部61と、固定点基準物標座標取得部62と、フィルタ処理部64と、を備える。物標相対座標取得部61は、船舶に搭載され、自船を基準とした物標の相対位置を示す相対座標(Trx,Try)をレーダエコーに基づいて取得する。固定点基準物標座標取得部62は、相対座標(Trx,Try)と、自船の位置と、に基づき、固定点を基準とした物標の位置を示す固定点基準座標(Tax,Tay)を取得する。フィルタ処理部64は、固定点基準座標(Tax,Tay)を入力して物標の運動情報を推定する。
【0064】
これにより、フィルタ処理部64には、自船の運動の影響が取り除かれた固定点基準座標(Tax,Tay)が入力され、これが物標の運動状態の推定に用いられる。従って、フィルタ処理部64の出力が時間遅れを含んでいても、自船の運動が物標の運動状態の推定に悪影響を及ぼすことを防止できるので、追尾物標の運動状態をより高精度で推定することができる。この結果、より正確な危険予測が可能になる。
【0065】
また、本実施形態の物標運動推定部6においては、フィルタ処理部64で推定される物標の運動情報が、物標の針路及び速度を含む。
【0066】
これにより、追尾物標の針路及び速度を正確に推定することができる。
【0067】
また、本実施形態の物標運動推定部6において、フィルタ処理部64は、前回に推定した物標の運動情報と、入力された固定点基準座標(Tax,Tay)と、に基づいて、物標の運動情報を推定する。また、フィルタ処理部64は、物標の運動情報を推定するにあたって、物標位置の平滑化処理を行う。そして、フィルタ処理部64は、推定した物標の運動情報に基づいて次回の物標位置を予測し、この予測された物標位置は、推定対象物標選別部63において運動情報を推定すべき物標を選別するのに用いられ、選別された物標の固定点基準座標(Tax,Tay)が当該フィルタ処理部64に入力される。
【0068】
即ち、物標の相対座標(Trx,Try)ではなく固定点基準座標(Tax,Tay)がフィルタ処理部64に入力される本実施形態の構成は、フィルタ処理部64の出力結果が発散し易い上記のような構成(帰還入力的な構成)に対して特に有効である。
【0069】
また、本実施形態の物標運動推定部6において、物標相対座標取得部61には、レーダエコーの取得方位が地球基準の方位(θ)で順次入力される。
【0070】
これにより、物標の相対座標(Trx,Try)の計算処理を簡潔に行うことができる。
【0071】
また、本実施形態の物標運動推定部6において、固定点基準物標座標取得部62は、GPS航法装置から取得される位置情報に対し、GPSアンテナ及びレーダアンテナ1の設置位置に基づくオフセット処理を行うことで自機位置を取得することもできるように構成されている。
【0072】
これにより、レーダアンテナ1とGPSアンテナとの設置位置が異なっていたとしても、レーダアンテナ1の位置を自機位置とすることができるので、物標の運動状態をより精度良く推定することができる。
【0073】
次に、上記実施形態の変形例を説明する。この変形例においては、GPSアンテナから得られる位置情報が示す自船の位置に応じて、フィルタ処理部64に物標の固定点基準座標(Tax,Tay)を入力するか、相対座標(Trx,Try)を入力するか、を切り換えるものである。
【0074】
即ち、高緯度においては、GPS航法装置より得られる位置情報の精度が低下することが多いため、固定点基準座標(Tax,Tay)の精度が低下して、物標の運動状態の推定精度が却って悪化するおそれがある。本変形例ではこの事情を考慮し、GPS航法装置より得られる自船の位置が北側の境界線(例えば、北緯85度)を越えて北に移動したとき、又は、南側の境界線(例えば、南緯85度)を越えて南に移動したときは、フィルタ処理部64に固定点基準座標(Tax,Tay)を入力させず、代わりに、従来と同様に相対座標(Trx,Try)を入力させるようになっている。
【0075】
フィルタ処理部64に相対座標(Trx,Try)が入力された場合は、フィルタ処理部64が推定する物標速度も相対速度になる。従って、この場合、推定真速度取得部65は、フィルタ処理部64が出力する相対速度に自船の速度を加算することで、物標の真速度を取得すれば良い。一方、推定相対速度取得部66は、フィルタ処理部64が出力する相対速度を、そのまま物標の相対速度として得ることとすれば良い。
【0076】
また、勿論、自船が高緯度の領域を脱した場合は、フィルタ処理部64に固定点基準座標(Tax,Tay)を再び入力させるようにすれば良い。なお、この復帰の判断(相対座標から固定点基準座標に戻す判断)の境界線は、固定点基準座標から相対座標に移行する場合の境界線と同一とせず若干異ならせて、ヒステリシス的な判断とすることが好ましい。ここでは、復帰させる場合の境界線を、(北緯85度及び南緯85度ではなく)例えば北緯80度及び南緯80度とすることが考えられる。
【0077】
以上に示すように、本変形例の物標運動推定部は、GPS航法装置から取得される自船の位置に応じて、フィルタ処理部64に固定点基準座標(Tax,Tay)を入力するか、相対座標(Trx,Try)を入力するか、を切り換える。
【0078】
これにより、GNSS航法装置による測位精度が低下し易い場所においては、固定点基準座標ではなく相対座標を運動推定に用いることで、運動状態の推定精度の悪化を抑制することができる。
【0079】
以上に本発明の好適な実施の形態を説明したが、上記の構成は例えば以下のように変更することができる。
【0080】
上記実施形態では、GNSSの一例としてGPSを用いた航法装置が用いられているが、他のGNSS航法装置を用いる構成であっても良いことは勿論である。
【0081】
本発明の物標運動推定装置は、船舶に限らず、飛行機、自動車等の任意の移動体に搭載することができる。
【符号の説明】
【0082】
6 物標運動推定部(物標運動推定装置)
11 レーダ装置
61 物標相対座標取得部(物標相対位置取得部)
62 固定点基準物標座標取得部(固定点基準物標位置取得部)
64 フィルタ処理部
65 推定真速度取得部(物標真速度取得部)
【特許請求の範囲】
【請求項1】
移動体に搭載され、自機位置を基準とした物標の相対位置である物標相対位置をレーダエコーに基づいて取得する物標相対位置取得部と、
前記物標相対位置と、前記自機位置と、に基づき、固定点を基準とした前記物標の位置である固定点基準物標位置を取得する固定点基準物標位置取得部と、
前記固定点基準物標位置を入力して物標の運動情報を推定するフィルタ処理部と、
を備えることを特徴とする物標運動推定装置。
【請求項2】
請求項1に記載の物標運動推定装置であって、
前記フィルタ処理部で推定される物標の運動情報が、物標の針路及び速度を含むことを特徴とする物標運動推定装置。
【請求項3】
請求項1に記載の物標運動推定装置であって、
前記フィルタ処理部は、前回に推定した物標の運動情報と、入力された固定点基準物標位置と、に基づいて、物標の運動情報を推定し、
前記フィルタ処理部は、物標の運動情報を推定するにあたって物標位置の平滑化処理を行い、
前記フィルタ処理部は、推定した物標の運動情報に基づいて次回の物標位置を予測し、この予測された物標位置は、運動情報を推定すべき物標の選別に用いられ、選別された物標の前記固定点基準物標位置が当該フィルタ処理部に入力されることを特徴とする物標運動推定装置。
【請求項4】
請求項1から3までの何れか一項に記載の物標運動推定装置であって、
前記物標相対位置取得部には、前記レーダエコーの取得方位が地球基準での方位で順次入力されることを特徴とする物標運動推定装置。
【請求項5】
請求項1から4までの何れか一項に記載の物標運動推定装置であって、
前記固定点基準物標位置取得部は、GNSS航法装置から取得される位置情報に対し、GNSSアンテナ及びレーダアンテナの設置位置に基づくオフセット処理を行うことで自機位置を取得することを特徴とする物標運動推定装置。
【請求項6】
請求項1から5までの何れか一項に記載の物標運動推定装置であって、
GNSS航法装置から取得される自機位置に応じて、前記フィルタ処理部に前記固定点基準物標位置を入力するか、前記物標相対位置を入力するか、を切り換えることを特徴とする物標運動推定装置。
【請求項7】
請求項1から6までの何れか一項に記載の物標運動推定装置を備えることを特徴とするレーダ装置。
【請求項1】
移動体に搭載され、自機位置を基準とした物標の相対位置である物標相対位置をレーダエコーに基づいて取得する物標相対位置取得部と、
前記物標相対位置と、前記自機位置と、に基づき、固定点を基準とした前記物標の位置である固定点基準物標位置を取得する固定点基準物標位置取得部と、
前記固定点基準物標位置を入力して物標の運動情報を推定するフィルタ処理部と、
を備えることを特徴とする物標運動推定装置。
【請求項2】
請求項1に記載の物標運動推定装置であって、
前記フィルタ処理部で推定される物標の運動情報が、物標の針路及び速度を含むことを特徴とする物標運動推定装置。
【請求項3】
請求項1に記載の物標運動推定装置であって、
前記フィルタ処理部は、前回に推定した物標の運動情報と、入力された固定点基準物標位置と、に基づいて、物標の運動情報を推定し、
前記フィルタ処理部は、物標の運動情報を推定するにあたって物標位置の平滑化処理を行い、
前記フィルタ処理部は、推定した物標の運動情報に基づいて次回の物標位置を予測し、この予測された物標位置は、運動情報を推定すべき物標の選別に用いられ、選別された物標の前記固定点基準物標位置が当該フィルタ処理部に入力されることを特徴とする物標運動推定装置。
【請求項4】
請求項1から3までの何れか一項に記載の物標運動推定装置であって、
前記物標相対位置取得部には、前記レーダエコーの取得方位が地球基準での方位で順次入力されることを特徴とする物標運動推定装置。
【請求項5】
請求項1から4までの何れか一項に記載の物標運動推定装置であって、
前記固定点基準物標位置取得部は、GNSS航法装置から取得される位置情報に対し、GNSSアンテナ及びレーダアンテナの設置位置に基づくオフセット処理を行うことで自機位置を取得することを特徴とする物標運動推定装置。
【請求項6】
請求項1から5までの何れか一項に記載の物標運動推定装置であって、
GNSS航法装置から取得される自機位置に応じて、前記フィルタ処理部に前記固定点基準物標位置を入力するか、前記物標相対位置を入力するか、を切り換えることを特徴とする物標運動推定装置。
【請求項7】
請求項1から6までの何れか一項に記載の物標運動推定装置を備えることを特徴とするレーダ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−154647(P2012−154647A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−11393(P2011−11393)
【出願日】平成23年1月21日(2011.1.21)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月21日(2011.1.21)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
[ Back to top ]