
物理量推定装置
【課題】連続的な出力が補償されかつ過渡的な挙動も表現できる物理量推定装置を提供すること。
【解決手段】物理量推定装置1は、エンジン、又は、このエンジンの吸排気系あるいは燃焼室の状態を示す所定の物理量を、ニューラルネットワークの出力yに基づいて推定する。ニューラルネットワークは、入力パラメータベクトルuの成分(u1,u2,…,uN)を基底とした空間内に配置された複数の動径基底関数hi(i=1〜M)の線形結合により構成され、入力パラメータベクトルの空間内におけるM個の動径基底関数hiのそれぞれの中心位置ベクトルti(i=1〜M)は、自己組織的なクラスタリング手法により決定される。
【解決手段】物理量推定装置1は、エンジン、又は、このエンジンの吸排気系あるいは燃焼室の状態を示す所定の物理量を、ニューラルネットワークの出力yに基づいて推定する。ニューラルネットワークは、入力パラメータベクトルuの成分(u1,u2,…,uN)を基底とした空間内に配置された複数の動径基底関数hi(i=1〜M)の線形結合により構成され、入力パラメータベクトルの空間内におけるM個の動径基底関数hiのそれぞれの中心位置ベクトルti(i=1〜M)は、自己組織的なクラスタリング手法により決定される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物理推定装置に関する。特に、内燃機関、又は、内燃機関の吸排気系あるいは燃焼室の状態を示す所定の物理量を、ニューラルネットワークの出力に基づいて推定する物理量推定装置に関する。
【背景技術】
【0002】
内燃機関やその排気浄化システムなどを制御対象とした制御装置では、制御対象の状態に応じて変化する様々な物理量を検出するため、複数のセンサが用いられる。しかしながら物理量の中には、原理的にセンサで検出できないものや、検出精度、耐久性、コストなどの理由からセンサを用いて直に検出することが好ましくないものがある。
【0003】
このような物理量に対しては、予め設定されたマップを検索することで逐次推定することができる。つまり、推定の対象となる物理量と相関のある複数のパラメータで入力パラメータを構成し、この入力パラメータに基づいてマップを検索することにより、当該物理量を直に検出せずに他のパラメータから推定することができる。
【0004】
また、以上のようなマップの検索に基づく推定の他、近年ではニューラルネットワーク(例えば、特許文献1参照)に基づいて物理量を推定する技術も提案されている。ニューラルネットワークの一種である多層パーセプトロン型は、入力層、中間層、出力層の3層で構成される。このニューラルネットワークでは、取り出される出力が推定の対象となる物理量に一致するように入力と出力との関係を学習させておくことにより、入力パラメータに応じて物理量を推定することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許3946562号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、マップを格子状のパラメータ空間に設定した場合、格子点間の値を非線形補間することが困難である。また、マップは、基本的には定常状態において取得されたデータに基づいて作成されるため、過渡的な挙動を表現することが困難である。したがって、状態の変化が激しい内燃機関を含んだ制御対象における物理量に対して、マップでは十分な精度で推定することができないものと考えられる。
【0007】
また、ニューラルネットワークに基づいて推定する場合、入力パラメータが取り得る範囲内での出力の連続性が課題となる。例えば、上述のような多層パーセプトロン型では、ニューロンの入出力関数はステップ状であるため、入力パラメータの空間において無限に大きな領域で値を持つ。このため、学習されていない入力に対しては、望ましい出力から大きく外れてしまい出力が不連続になってしまう場合がある。
【0008】
本発明は、ニューラルネットワークに基づいて物理量を推定する物理量推定装置であって、連続的な出力が補償されかつ過渡的な挙動も表現できる物理量推定装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するため本発明は、内燃機関、又は、当該内燃機関の吸排気系あるいは燃焼室の状態を示す所定の物理量を、ニューラルネットワークの出力に基づいて推定する物理量推定装置を提供する。前記ニューラルネットワークは、入力パラメータの成分を基底とした空間内に配置された複数の動径基底関数の線形結合により構成され、前記入力パラメータの空間内における前記複数の動径基底関数のそれぞれの中心位置は、自己組織的なクラスタリング手法により決定される。
【0010】
この発明によれば、内燃機関、又は、この内燃機関の吸排気系あるいは燃焼室の状態を示す所定の物理量の推定に、入力パラメータを基底とした空間内に複数の動径基底関数を配置して構成されたニューラルネットワーク、いわゆる動径基底関数ネットワークを用いる。これにより、従来のマップを用いた技術では表現できなかった物理量の過渡的な挙動も表現することが可能となる。また、動径基底関数ネットワークに基づいて物理量を推定することにより、多層型ニューラルネットワークを用いた場合と比較して、入力に対して連続的な出力を取り出すことが可能となる。
また、自己組織的なクラスタリング手法により、入力パラメータ空間内における各動径基底関数の中心位置を決定することにより、入力パラメータ空間内に効率的に基底関数を配置することができる。したがって、多層型ニューラルネットワークに基づいて物理量を推定する場合と比較して、出力の連続性を維持しながら、ニューラルネットワークを構成するニューロン数を抑えることができる。
【0011】
この場合、前記ニューラルネットワークの学習には、前記内燃機関の過渡運転時に取得されたデータが用いられることが好ましい。
【0012】
この発明によれば、ニューラルネットワークの学習に、内燃機関の過渡運転時に取得されたデータを用いることにより、マップや物理モデルでは表現しにくい過渡運転時における物理量の変化を表現することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係る物理量推定装置の構成を示す模式図である。
【図2】2次元平面上に配列されたM個のノードを示す図である。
【図3】学習データのうちの出力データ(フィードNOx量)と、車速とを示す図である。
【図4】フィードNOxの実測値と、実施例1の結果と、マップ検索による結果と、を比較する図である。
【図5】図4のうち破線で示した区間の部分拡大図である。
【図6】シリンダに吸入された吸気の成分を示す図である。
【図7】Inert−EGR量と、エンジンから排出される排気のNOx、HC、及びスートの濃度との関係を示す図である。
【図8】シミュレーションに基づくInert−EGR量の測定値と、実施例2の結果とを比較する図である。
【発明を実施するための形態】
【0014】
以下、本発明の一実施形態を、図面を参照して説明する。
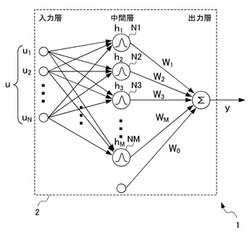
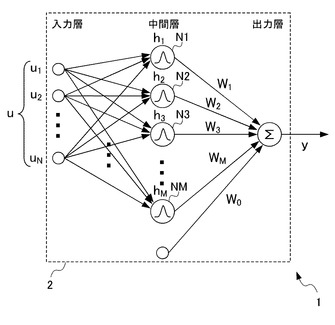
図1は、本実施形態に係る物理量推定装置1の構成を示す図である。
物理量推定装置1は、入力パラメータベクトルuに対して、この入力パラメータベクトルuに応じた出力yを出力するニューラルネットワーク2を備える。このニューラルネットワーク2の入力パラメータベクトルuの成分は、図示しないエンジン、又は、エンジンの吸排気系あるいは燃焼室における各種センサの検出値に基づいて構成されている。そして、このニューラルネットワーク2は、入力パラメータベクトルuに対する出力yが、上記エンジン及びその吸排気系や燃焼室における所定の物理量に一致するように学習されている。
【0015】
ニューラルネットワーク2は、入力層、中間層、出力層の3つの層で構成される。入力パラメータベクトルuは、下記式(1)に示すように、N個の成分(u1,…,uN)で構成されたN次元ベクトルである。各成分(u1,…,uN)には、例えば、エンジン回転数、燃料噴射量、燃料噴射時期、吸入空気量、空燃比、排気温度、過給圧などのエンジン及びその吸排気系の状態を示すパラメータが入力される。
入力層に入力された入力パラメータベクトルuのN個の成分は、それぞれ、中間層を構成するM個のニューロンN1,…,NMに入力される。
【数1】

【0016】
中間層を構成するニューロンNi(i=1〜M)は、各々に設定された動径基底関数hiに従った値を出力層へ出力する。動径基底関数hiとは、入力パラメータベクトルuの成分(u1,…,uN)を基底としたN次元の空間内に配置された関数であり、各々に設定された中心位置ベクトルtiからのユークリッド距離に依存する。本実施形態では、各ニューロンNiの動径基底関数hiを、下記式(2)に示すような中心位置ベクトルtiを中心としたN次元のガウス関数で定義する。ここで、下記式(2)において、σiは、動径基底関数hiの中心位置ベクトルtiからの広がりを示すものであり、以下では基底関数設定パラメータという。
【数2】
【0017】
出力層は、下記式(3)に示すように、各ニューロンNi(i=1〜M)の出力hi(u;ti)の線形結合とオフセット値W0との和を、出力yとして出力する。ここで、Wi(i=1,…,M)は、中間層のi番目のニューロンと出力層との間の結合荷重を示す。
【数3】
【0018】
次に、ニューラルネットワーク2の学習は、N次元の入力ベクトル空間内におけるM個のニューロンの中心位置ベクトルti(i=1〜M)を決定する工程と、結合荷重Wi(i=1〜M)、オフセット値W0、及び基底関数設定パラメータσi(i=1〜M)を決定する工程との2つの工程で構成される。以下、これら工程について順に説明する。
【0019】
先ず、学習を行うにあたり、下記式(4)に示すようなP個の学習データを準備する。ベクトルXkは、入力ベクトルuに対応した入力データベクトルである。Ykは、入力データベクトルXkに対する出力として要求される出力データである。なお、この学習データ{Xk,Yk}は、内燃機関の過渡運転時に取得されたデータが用いられる。
【数4】
【0020】
<中心位置決定工程>
ニューロンNiの中心位置ベクトルtiは、自己組織的なクラスタリング手法により決定することが好ましい。以下では、その一例として自己組織化マップ(SOM(Self Organizing Maps))を用いて決定する例について説明する。なお、この中心位置ベクトルtiの決定では、上記式(4)の学習データのうち、入力データベクトルXk(k=1〜P)のみを使用する。
【0021】
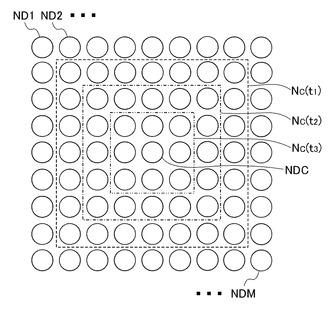
先ず、図2に示すように2次元平面上に配列されたM個のノードNDi(i=1〜M)のそれぞれに割り当てられたN次元の参照ベクトルmi(i=1〜M)に対し、適当な初期値を割り当てる(下記式(5)参照)。ここで、“t”は、後述のSTEP1からSTEP4を繰り返した回数を示す離散時間である。すなわち、ここで準備したM個のN次元参照ベクトルの初期値mi(t=0)に対し、以下のSTEP1〜4を繰り返し施すことで最終的に得られた参照ベクトルmiを、各ニューロンNiの中心位置ベクトルtiとして決定する。なお、これら参照ベクトルmiの初期値は、例えば乱数で決定してもよい。
【数5】
【0022】
STEP1では、準備したP個の入力データベクトルのうちの1つXkを選択する。
STEP2では、下記式(6)に示すように、M個の参照ベクトルmi(i=1〜M)のうち、上記選択したN次元入力データベクトルXkとのN次元ユークリッド距離が最小となる参照ベクトルmC(以下、「勝者ベクトル」という)を有するノードNDCを選択する。
【数6】
【0023】
STEP3では、STEP2で選択したノードNDCに付随した勝者ベクトルmCと、このノードNDCの近傍のノードNDiに付随した参照ベクトルmiとを、それぞれ、下記式(7)に従って更新する。下記式(7)において、hci(t)は、ノードが配列された2次元平面内のノードNDCの近傍においてのみ有意な値を持つ近傍関数であり、例えば、下記式(8)に示すようなガウス関数が用いられる。
また、下記式(8)において、ベクトルrCは、ノードNDCの2次元平面上での位置ベクトルを示し、ベクトルriは、i番目のノードNDiの2次元平面上での位置ベクトルを示す。
【数7】
【数8】
【0024】
上記式(8)において、α(t)は、学習率係数であり、0から1の間に設定される。また、この学習率係数α(t)は、時間tの減少関数として設定される。また、上記式(8)において、σ(t)は、近傍関数の広がりを示すパラメータであり、学習率係数α(t)と同じように、時間tの減少関数として設定される。
【0025】
上記式(7)により、ノードNDCに付随した勝者ベクトルmCと、このノードNDCの近傍のノードNDiに付随した参照ベクトルmiは、N次元の入力パラメータ空間内において、上記STEP1で選択した入力データベクトルXk側に引き寄せられるように、その位置が更新される。
【0026】
なお、STEP3では、上記式(7)及び(8)のように、近傍関数hci(t)を乗算することで、ノードNDC近傍のノードNDiに付随した参照ベクトルmiを更新する代わりに、ノードNDCの近傍の集合NC(t)を定義し、下記式(9)に示すように、この集合NC(t)に属するノードNDiの参照ベクトルmiのみ、その位置を更新するようにしてもよい(図2参照)。この場合、集合NC(t)は、図2に示すように時間tが進むにつれて小さくなるように設定される。
【数9】
【0027】
STEP4では、準備したP個の入力データベクトルのうち、上記STEP2,3を実行していないものを選択し、STEP2に移る。そして、準備したP個の入力データベクトルの全てに対し、上記STEP2,3を実行した場合には、時刻tを更新(t→t+1)し、再びSTEP1から実行する。
【0028】
以上のSTEP1〜4は、参照ベクトルmiの位置が概ね収束する程度に繰り返すか、あるいは、所定の評価関数により完了が判定されるまで、繰り返し実行する。以上のようにして、STEP1〜4を繰り返し実行することで最終的に得られた参照ベクトルmi(i=1〜M)を、各動径基底関数hi(u;ti)の中心位置ベクトルtiとして採用する。
【0029】
<パラメータ学習工程>
以上のようにして中心位置ベクトルtiを決定した後、各ニューロンの結合荷重Wi、W0は、準備した学習データ(上記式(4)参照)に基づいて、例えば、最小2乗法により決定することができる。すなわち、下記式(10)に示すような学習データの出力データYkと出力y(Xk)の誤差の二乗和Jが最小になるようなWi、W0を探索する。
【数10】
【0030】
また、各ニューロンの基底関数設定パラメータσiは、例えば、ニューロンによらず全て同じ固定値σが用いられる。この場合、固定値σは、実験値との比較に基づいて、例えば手動で決定することができる。
【0031】
以上詳述した本実施形態によれば、以下の効果を奏する。
(1)本実施形態によれば、エンジン、又は、エンジンの吸排気系あるいは燃焼室の状態を示す所定の物理量の推定に、入力パラメータベクトルuの成分を基底とした空間内に複数の動径基底関数を配置して構成されたニューラルネットワーク、いわゆる動径基底関数ネットワークを用いる。これにより、従来のマップを用いた技術では表現できなかった物理量の過渡的な挙動も表現することが可能となる。また、動径基底関数ネットワークに基づいて物理量を推定することにより、多層型ニューラルネットワークを用いた場合と比較して、入力に対して連続的な出力を取り出すことが可能となる。
また、自己組織的なクラスタリング手法により、入力パラメータ空間内における各動径基底関数の中心位置ベクトルtiを決定することにより、入力パラメータ空間内に効率的に動径基底関数を配置することができる。したがって、多層型ニューラルネットワークに基づいて物理量を推定する場合と比較して、出力の連続性を維持しながら、ニューラルネットワークを構成するニューロン数Mを抑えることができる。
【0032】
(2)ニューラルネットワークの学習に、エンジンの過渡運転時に取得されたデータを用いることにより、マップや物理モデルでは表現しにくい過渡運転時における物理量の変化を表現することができる。
【0033】
<実施例1>
以下、上記実施形態の物理量推定装置を、エンジンから排出されるNOx(フィードNOx)の量の推定に適用した例を実施例1として説明する。
【0034】
ディーゼルエンジンやリーンバーンガソリンエンジンにおいて、エンジンから排出されるNOxを低減する技術の1つとして、選択還元触媒(SCR)を用いた技術がある。SCRシステムでは、SCRに対し適切な量の尿素水を噴射することにより、尿素水から加水分解により生成されたアンモニアで排出中のNOxを還元する。そこで、SCRシステムでは、エンジンから排出されるNOxに対し過不足ない適切な量の尿素水を噴射するため、エンジンのフィードNOx量を検出する必要がある。排気中のフィードNOx量を検出できるNOxセンサは存在するものの、現存するNOxセンサには、消費電力、コスト、応答面などに課題がある。また、エンジン始動直後は、センサが不活性のため計測ができない場合がある。これに対して、上記実施形態の物理量推定装置は、このようなフィードNOx量の推定にも適用することができる。
【0035】
フィードNOx量を推定するニューラルネットワークを構築するには、すなわちニューラルネットワークの出力y(u)をエンジンのフィードNOx量に一致させるためには、入力パラメータベクトルuの成分には、エンジン回転数(u1)、燃料噴射量(u2)、λ値(u3)、過給圧(u4)、排気温度(u5)、吸入空気量(u6)の6つのパラメータ含めることが好ましい。
【0036】
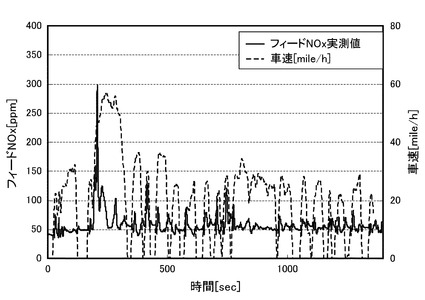
図3は、学習データのうちの出力データ(フィードNOx量)と、車速とを示す図である。図3において、破線は車速を示し、実線はそのときのフィードNOx量を示す。
上記6つのパラメータとフィードNOx量との関係を示す学習データには、図3に示すように、エンジンの過渡運転時に取得されたデータを含むことが好ましい。このような学習データに基づいて上記手順によりニューラルネットワークを構築することにより、その出力yを実際のエンジンのフィードNOx量に一致させることができる。
【0037】
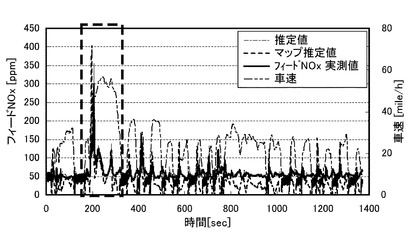
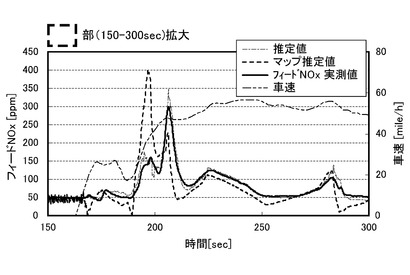
図4は、フィードNOxの実測値と、実施例1の結果と、マップ検索による結果と、を比較する図である。図5は、図4のうち破線で示した区間の部分拡大図である。
図4,5において、2点鎖線は車速を示し、実線はフィードNOxの実測値を示し、破線はマップによるフィードNOxの推定値を示し、1点鎖線は物理量推定装置によるフィードNOxの推定値を示す。
【0038】
図4,5に示すように、マップによる推定値は、実測値から大きく外れる。特に車両が加速した時などフィードNOxの変化が激しい時における、マップの推定値と実測値とのずれは大きい。これに対して、物理量推定装置によるフィードNOxの推定値は、実測値とほぼ同じ値となる。特に、フィードNOxに大きな変化が現れる時(時刻200sec近傍)であっても、精度良く推定することが検証された。
【0039】
<実施例2>
以下、上記実施形態の物理量推定装置を、エンジンの吸気中のEGR成分のうちの不活性ガス成分の量の推定に適用した例を実施例2として説明する。
【0040】
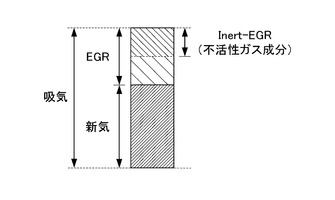
図6は、シリンダに吸入された吸気の成分を示す図である。
図6に示すように、吸気は、新たに吸入された分(新気成分)と、排気還流装置により排気から還流された分(EGR成分)とで構成される。ところで、ディーゼルエンジンやリーンバーンガソリンエンジンは、リーン燃焼を行うことにより、排気中には不活性ガスの他残留酸素が多く存在する。そこで、図6に示すように、EGR成分のうち、この不活性ガスの成分のみを指してInert−EGRという。また、この不活性ガスの量をInert−EGR量という。
【0041】
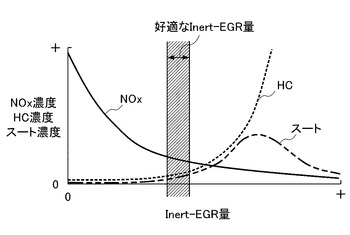
図7は、以上のように定義されたInert−EGR量と、エンジンから排出される排気のNOx、HC、及びスートの濃度との関係を示す図である。図7に示すように、Inert−EGR量と排気のNOx濃度、HC濃度、及びスート濃度との間には強い相関がある。
【0042】
より具体的には、Inert−EGR量を多くすると、混合気の比熱量が増加することにより燃焼温度が低下し、NOx濃度は減少する。また、このような燃焼温度の低下に伴い、HCやスートの濃度が増加する。また、さらにInert−EGR量を多くすると、燃焼温度の低下により未燃のHCが増加するため、スート濃度は減少する。そこで、これらNOx濃度、HC濃度、及びスート濃度を、できるだけ全て低減するためには、図7中、ハッチングで示す領域内に、Inert−EGR量を制御することが好ましい。
【0043】
そこで、Inert−EGR量のフィードバック制御を行うにあたり、Inert−EGR量を検出する必要があるが、シリンダ内のInert−EGR量を必要な精度で検出でき、かつ、実際のエンジンの運転状況下での使用に耐えうる耐久性を有するセンサは存在しない。また、Inert−EGR量を物理モデルに基づいて推定することが考えられるものの、Inert−EGR量は非線形で予測のしにくい挙動を示す。特に、過渡時における挙動は複雑であり、このような挙動を十分な精度で再現できる簡易な物理モデルを構築するのは容易ではない。また、定常運転であれば、空燃比センサの出力値とEGR率に基づいて、Inert−EGR量を算出することができるものの、過渡運転時にはエア遅れやノイズなどにより、Inert−EGR量の正確な値を推定することが困難である。これに対して、上記実施形態の物理量推定装置は、このようなInert−EGR量の推定にも適用することができる。
【0044】
Inert−EGR量を推定するニューラルネットワークを構築するには、すなわちニューラルネットワークの出力y(u)をInert−EGR量に一致させるためには、入力パラメータベクトルuの成分には、エンジン回転数(u1)、燃料噴射量(u2)、λ値(u3)、過給圧(u4)、吸入空気量(u5)、及びEGR率(u6)の6つのパラメータを含めることが好ましい。また、図3と同様の学習データに基づいて、上記手順によりニューラルネットワークを構築することにより、その出力yを実際のエンジンのInert−EGR量に一致させることができる。
【0045】
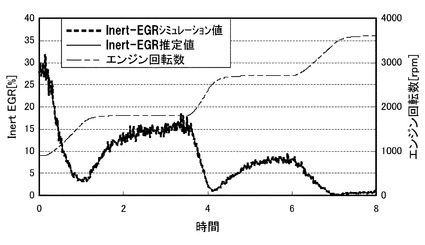
図8は、シミュレーションに基づくInert−EGR量の測定値(以下、「シミュレーション値」という)と、実施例2の結果とを比較する図である。図8において、2点鎖線はエンジン回転数を示し、破線はInert−EGR量のシミュレーション値を示し、実線は物理量推定装置によるInert−EGR量の推定値を示す。また、図8では、Inert−EGR量を、図6に示すように全吸気量に対するInert−EGR量の割合で示す。
図8に示すように、物理量推定装置によるInert−EGR量の推定値は、シミュレーション値と高い精度で一致することが検証された。
【0046】
なお、上記実施形態では、中心位置ベクトルtiを、自己組織化マップを用いて決定したが、本発明はこれに限るものではない。中心位置ベクトルtiを決定する自己組織的なクラスタリング手法としては、例えば、ニューラルガス、遺伝的アルゴリズム、粒子群最適化(Particle Swarm Optimization)アルゴリズムや、各種学習ベクトル量子化(Learning Vector Quantization)アルゴリズムなどの既知の手法を用いてもよい。
【符号の説明】
【0047】
1…物理量推定装置
2…ニューラルネットワーク
【技術分野】
【0001】
本発明は、物理推定装置に関する。特に、内燃機関、又は、内燃機関の吸排気系あるいは燃焼室の状態を示す所定の物理量を、ニューラルネットワークの出力に基づいて推定する物理量推定装置に関する。
【背景技術】
【0002】
内燃機関やその排気浄化システムなどを制御対象とした制御装置では、制御対象の状態に応じて変化する様々な物理量を検出するため、複数のセンサが用いられる。しかしながら物理量の中には、原理的にセンサで検出できないものや、検出精度、耐久性、コストなどの理由からセンサを用いて直に検出することが好ましくないものがある。
【0003】
このような物理量に対しては、予め設定されたマップを検索することで逐次推定することができる。つまり、推定の対象となる物理量と相関のある複数のパラメータで入力パラメータを構成し、この入力パラメータに基づいてマップを検索することにより、当該物理量を直に検出せずに他のパラメータから推定することができる。
【0004】
また、以上のようなマップの検索に基づく推定の他、近年ではニューラルネットワーク(例えば、特許文献1参照)に基づいて物理量を推定する技術も提案されている。ニューラルネットワークの一種である多層パーセプトロン型は、入力層、中間層、出力層の3層で構成される。このニューラルネットワークでは、取り出される出力が推定の対象となる物理量に一致するように入力と出力との関係を学習させておくことにより、入力パラメータに応じて物理量を推定することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許3946562号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、マップを格子状のパラメータ空間に設定した場合、格子点間の値を非線形補間することが困難である。また、マップは、基本的には定常状態において取得されたデータに基づいて作成されるため、過渡的な挙動を表現することが困難である。したがって、状態の変化が激しい内燃機関を含んだ制御対象における物理量に対して、マップでは十分な精度で推定することができないものと考えられる。
【0007】
また、ニューラルネットワークに基づいて推定する場合、入力パラメータが取り得る範囲内での出力の連続性が課題となる。例えば、上述のような多層パーセプトロン型では、ニューロンの入出力関数はステップ状であるため、入力パラメータの空間において無限に大きな領域で値を持つ。このため、学習されていない入力に対しては、望ましい出力から大きく外れてしまい出力が不連続になってしまう場合がある。
【0008】
本発明は、ニューラルネットワークに基づいて物理量を推定する物理量推定装置であって、連続的な出力が補償されかつ過渡的な挙動も表現できる物理量推定装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するため本発明は、内燃機関、又は、当該内燃機関の吸排気系あるいは燃焼室の状態を示す所定の物理量を、ニューラルネットワークの出力に基づいて推定する物理量推定装置を提供する。前記ニューラルネットワークは、入力パラメータの成分を基底とした空間内に配置された複数の動径基底関数の線形結合により構成され、前記入力パラメータの空間内における前記複数の動径基底関数のそれぞれの中心位置は、自己組織的なクラスタリング手法により決定される。
【0010】
この発明によれば、内燃機関、又は、この内燃機関の吸排気系あるいは燃焼室の状態を示す所定の物理量の推定に、入力パラメータを基底とした空間内に複数の動径基底関数を配置して構成されたニューラルネットワーク、いわゆる動径基底関数ネットワークを用いる。これにより、従来のマップを用いた技術では表現できなかった物理量の過渡的な挙動も表現することが可能となる。また、動径基底関数ネットワークに基づいて物理量を推定することにより、多層型ニューラルネットワークを用いた場合と比較して、入力に対して連続的な出力を取り出すことが可能となる。
また、自己組織的なクラスタリング手法により、入力パラメータ空間内における各動径基底関数の中心位置を決定することにより、入力パラメータ空間内に効率的に基底関数を配置することができる。したがって、多層型ニューラルネットワークに基づいて物理量を推定する場合と比較して、出力の連続性を維持しながら、ニューラルネットワークを構成するニューロン数を抑えることができる。
【0011】
この場合、前記ニューラルネットワークの学習には、前記内燃機関の過渡運転時に取得されたデータが用いられることが好ましい。
【0012】
この発明によれば、ニューラルネットワークの学習に、内燃機関の過渡運転時に取得されたデータを用いることにより、マップや物理モデルでは表現しにくい過渡運転時における物理量の変化を表現することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係る物理量推定装置の構成を示す模式図である。
【図2】2次元平面上に配列されたM個のノードを示す図である。
【図3】学習データのうちの出力データ(フィードNOx量)と、車速とを示す図である。
【図4】フィードNOxの実測値と、実施例1の結果と、マップ検索による結果と、を比較する図である。
【図5】図4のうち破線で示した区間の部分拡大図である。
【図6】シリンダに吸入された吸気の成分を示す図である。
【図7】Inert−EGR量と、エンジンから排出される排気のNOx、HC、及びスートの濃度との関係を示す図である。
【図8】シミュレーションに基づくInert−EGR量の測定値と、実施例2の結果とを比較する図である。
【発明を実施するための形態】
【0014】
以下、本発明の一実施形態を、図面を参照して説明する。
図1は、本実施形態に係る物理量推定装置1の構成を示す図である。
物理量推定装置1は、入力パラメータベクトルuに対して、この入力パラメータベクトルuに応じた出力yを出力するニューラルネットワーク2を備える。このニューラルネットワーク2の入力パラメータベクトルuの成分は、図示しないエンジン、又は、エンジンの吸排気系あるいは燃焼室における各種センサの検出値に基づいて構成されている。そして、このニューラルネットワーク2は、入力パラメータベクトルuに対する出力yが、上記エンジン及びその吸排気系や燃焼室における所定の物理量に一致するように学習されている。
【0015】
ニューラルネットワーク2は、入力層、中間層、出力層の3つの層で構成される。入力パラメータベクトルuは、下記式(1)に示すように、N個の成分(u1,…,uN)で構成されたN次元ベクトルである。各成分(u1,…,uN)には、例えば、エンジン回転数、燃料噴射量、燃料噴射時期、吸入空気量、空燃比、排気温度、過給圧などのエンジン及びその吸排気系の状態を示すパラメータが入力される。
入力層に入力された入力パラメータベクトルuのN個の成分は、それぞれ、中間層を構成するM個のニューロンN1,…,NMに入力される。
【数1】
【0016】
中間層を構成するニューロンNi(i=1〜M)は、各々に設定された動径基底関数hiに従った値を出力層へ出力する。動径基底関数hiとは、入力パラメータベクトルuの成分(u1,…,uN)を基底としたN次元の空間内に配置された関数であり、各々に設定された中心位置ベクトルtiからのユークリッド距離に依存する。本実施形態では、各ニューロンNiの動径基底関数hiを、下記式(2)に示すような中心位置ベクトルtiを中心としたN次元のガウス関数で定義する。ここで、下記式(2)において、σiは、動径基底関数hiの中心位置ベクトルtiからの広がりを示すものであり、以下では基底関数設定パラメータという。
【数2】
【0017】
出力層は、下記式(3)に示すように、各ニューロンNi(i=1〜M)の出力hi(u;ti)の線形結合とオフセット値W0との和を、出力yとして出力する。ここで、Wi(i=1,…,M)は、中間層のi番目のニューロンと出力層との間の結合荷重を示す。
【数3】
【0018】
次に、ニューラルネットワーク2の学習は、N次元の入力ベクトル空間内におけるM個のニューロンの中心位置ベクトルti(i=1〜M)を決定する工程と、結合荷重Wi(i=1〜M)、オフセット値W0、及び基底関数設定パラメータσi(i=1〜M)を決定する工程との2つの工程で構成される。以下、これら工程について順に説明する。
【0019】
先ず、学習を行うにあたり、下記式(4)に示すようなP個の学習データを準備する。ベクトルXkは、入力ベクトルuに対応した入力データベクトルである。Ykは、入力データベクトルXkに対する出力として要求される出力データである。なお、この学習データ{Xk,Yk}は、内燃機関の過渡運転時に取得されたデータが用いられる。
【数4】
【0020】
<中心位置決定工程>
ニューロンNiの中心位置ベクトルtiは、自己組織的なクラスタリング手法により決定することが好ましい。以下では、その一例として自己組織化マップ(SOM(Self Organizing Maps))を用いて決定する例について説明する。なお、この中心位置ベクトルtiの決定では、上記式(4)の学習データのうち、入力データベクトルXk(k=1〜P)のみを使用する。
【0021】
先ず、図2に示すように2次元平面上に配列されたM個のノードNDi(i=1〜M)のそれぞれに割り当てられたN次元の参照ベクトルmi(i=1〜M)に対し、適当な初期値を割り当てる(下記式(5)参照)。ここで、“t”は、後述のSTEP1からSTEP4を繰り返した回数を示す離散時間である。すなわち、ここで準備したM個のN次元参照ベクトルの初期値mi(t=0)に対し、以下のSTEP1〜4を繰り返し施すことで最終的に得られた参照ベクトルmiを、各ニューロンNiの中心位置ベクトルtiとして決定する。なお、これら参照ベクトルmiの初期値は、例えば乱数で決定してもよい。
【数5】
【0022】
STEP1では、準備したP個の入力データベクトルのうちの1つXkを選択する。
STEP2では、下記式(6)に示すように、M個の参照ベクトルmi(i=1〜M)のうち、上記選択したN次元入力データベクトルXkとのN次元ユークリッド距離が最小となる参照ベクトルmC(以下、「勝者ベクトル」という)を有するノードNDCを選択する。
【数6】
【0023】
STEP3では、STEP2で選択したノードNDCに付随した勝者ベクトルmCと、このノードNDCの近傍のノードNDiに付随した参照ベクトルmiとを、それぞれ、下記式(7)に従って更新する。下記式(7)において、hci(t)は、ノードが配列された2次元平面内のノードNDCの近傍においてのみ有意な値を持つ近傍関数であり、例えば、下記式(8)に示すようなガウス関数が用いられる。
また、下記式(8)において、ベクトルrCは、ノードNDCの2次元平面上での位置ベクトルを示し、ベクトルriは、i番目のノードNDiの2次元平面上での位置ベクトルを示す。
【数7】
【数8】
【0024】
上記式(8)において、α(t)は、学習率係数であり、0から1の間に設定される。また、この学習率係数α(t)は、時間tの減少関数として設定される。また、上記式(8)において、σ(t)は、近傍関数の広がりを示すパラメータであり、学習率係数α(t)と同じように、時間tの減少関数として設定される。
【0025】
上記式(7)により、ノードNDCに付随した勝者ベクトルmCと、このノードNDCの近傍のノードNDiに付随した参照ベクトルmiは、N次元の入力パラメータ空間内において、上記STEP1で選択した入力データベクトルXk側に引き寄せられるように、その位置が更新される。
【0026】
なお、STEP3では、上記式(7)及び(8)のように、近傍関数hci(t)を乗算することで、ノードNDC近傍のノードNDiに付随した参照ベクトルmiを更新する代わりに、ノードNDCの近傍の集合NC(t)を定義し、下記式(9)に示すように、この集合NC(t)に属するノードNDiの参照ベクトルmiのみ、その位置を更新するようにしてもよい(図2参照)。この場合、集合NC(t)は、図2に示すように時間tが進むにつれて小さくなるように設定される。
【数9】
【0027】
STEP4では、準備したP個の入力データベクトルのうち、上記STEP2,3を実行していないものを選択し、STEP2に移る。そして、準備したP個の入力データベクトルの全てに対し、上記STEP2,3を実行した場合には、時刻tを更新(t→t+1)し、再びSTEP1から実行する。
【0028】
以上のSTEP1〜4は、参照ベクトルmiの位置が概ね収束する程度に繰り返すか、あるいは、所定の評価関数により完了が判定されるまで、繰り返し実行する。以上のようにして、STEP1〜4を繰り返し実行することで最終的に得られた参照ベクトルmi(i=1〜M)を、各動径基底関数hi(u;ti)の中心位置ベクトルtiとして採用する。
【0029】
<パラメータ学習工程>
以上のようにして中心位置ベクトルtiを決定した後、各ニューロンの結合荷重Wi、W0は、準備した学習データ(上記式(4)参照)に基づいて、例えば、最小2乗法により決定することができる。すなわち、下記式(10)に示すような学習データの出力データYkと出力y(Xk)の誤差の二乗和Jが最小になるようなWi、W0を探索する。
【数10】
【0030】
また、各ニューロンの基底関数設定パラメータσiは、例えば、ニューロンによらず全て同じ固定値σが用いられる。この場合、固定値σは、実験値との比較に基づいて、例えば手動で決定することができる。
【0031】
以上詳述した本実施形態によれば、以下の効果を奏する。
(1)本実施形態によれば、エンジン、又は、エンジンの吸排気系あるいは燃焼室の状態を示す所定の物理量の推定に、入力パラメータベクトルuの成分を基底とした空間内に複数の動径基底関数を配置して構成されたニューラルネットワーク、いわゆる動径基底関数ネットワークを用いる。これにより、従来のマップを用いた技術では表現できなかった物理量の過渡的な挙動も表現することが可能となる。また、動径基底関数ネットワークに基づいて物理量を推定することにより、多層型ニューラルネットワークを用いた場合と比較して、入力に対して連続的な出力を取り出すことが可能となる。
また、自己組織的なクラスタリング手法により、入力パラメータ空間内における各動径基底関数の中心位置ベクトルtiを決定することにより、入力パラメータ空間内に効率的に動径基底関数を配置することができる。したがって、多層型ニューラルネットワークに基づいて物理量を推定する場合と比較して、出力の連続性を維持しながら、ニューラルネットワークを構成するニューロン数Mを抑えることができる。
【0032】
(2)ニューラルネットワークの学習に、エンジンの過渡運転時に取得されたデータを用いることにより、マップや物理モデルでは表現しにくい過渡運転時における物理量の変化を表現することができる。
【0033】
<実施例1>
以下、上記実施形態の物理量推定装置を、エンジンから排出されるNOx(フィードNOx)の量の推定に適用した例を実施例1として説明する。
【0034】
ディーゼルエンジンやリーンバーンガソリンエンジンにおいて、エンジンから排出されるNOxを低減する技術の1つとして、選択還元触媒(SCR)を用いた技術がある。SCRシステムでは、SCRに対し適切な量の尿素水を噴射することにより、尿素水から加水分解により生成されたアンモニアで排出中のNOxを還元する。そこで、SCRシステムでは、エンジンから排出されるNOxに対し過不足ない適切な量の尿素水を噴射するため、エンジンのフィードNOx量を検出する必要がある。排気中のフィードNOx量を検出できるNOxセンサは存在するものの、現存するNOxセンサには、消費電力、コスト、応答面などに課題がある。また、エンジン始動直後は、センサが不活性のため計測ができない場合がある。これに対して、上記実施形態の物理量推定装置は、このようなフィードNOx量の推定にも適用することができる。
【0035】
フィードNOx量を推定するニューラルネットワークを構築するには、すなわちニューラルネットワークの出力y(u)をエンジンのフィードNOx量に一致させるためには、入力パラメータベクトルuの成分には、エンジン回転数(u1)、燃料噴射量(u2)、λ値(u3)、過給圧(u4)、排気温度(u5)、吸入空気量(u6)の6つのパラメータ含めることが好ましい。
【0036】
図3は、学習データのうちの出力データ(フィードNOx量)と、車速とを示す図である。図3において、破線は車速を示し、実線はそのときのフィードNOx量を示す。
上記6つのパラメータとフィードNOx量との関係を示す学習データには、図3に示すように、エンジンの過渡運転時に取得されたデータを含むことが好ましい。このような学習データに基づいて上記手順によりニューラルネットワークを構築することにより、その出力yを実際のエンジンのフィードNOx量に一致させることができる。
【0037】
図4は、フィードNOxの実測値と、実施例1の結果と、マップ検索による結果と、を比較する図である。図5は、図4のうち破線で示した区間の部分拡大図である。
図4,5において、2点鎖線は車速を示し、実線はフィードNOxの実測値を示し、破線はマップによるフィードNOxの推定値を示し、1点鎖線は物理量推定装置によるフィードNOxの推定値を示す。
【0038】
図4,5に示すように、マップによる推定値は、実測値から大きく外れる。特に車両が加速した時などフィードNOxの変化が激しい時における、マップの推定値と実測値とのずれは大きい。これに対して、物理量推定装置によるフィードNOxの推定値は、実測値とほぼ同じ値となる。特に、フィードNOxに大きな変化が現れる時(時刻200sec近傍)であっても、精度良く推定することが検証された。
【0039】
<実施例2>
以下、上記実施形態の物理量推定装置を、エンジンの吸気中のEGR成分のうちの不活性ガス成分の量の推定に適用した例を実施例2として説明する。
【0040】
図6は、シリンダに吸入された吸気の成分を示す図である。
図6に示すように、吸気は、新たに吸入された分(新気成分)と、排気還流装置により排気から還流された分(EGR成分)とで構成される。ところで、ディーゼルエンジンやリーンバーンガソリンエンジンは、リーン燃焼を行うことにより、排気中には不活性ガスの他残留酸素が多く存在する。そこで、図6に示すように、EGR成分のうち、この不活性ガスの成分のみを指してInert−EGRという。また、この不活性ガスの量をInert−EGR量という。
【0041】
図7は、以上のように定義されたInert−EGR量と、エンジンから排出される排気のNOx、HC、及びスートの濃度との関係を示す図である。図7に示すように、Inert−EGR量と排気のNOx濃度、HC濃度、及びスート濃度との間には強い相関がある。
【0042】
より具体的には、Inert−EGR量を多くすると、混合気の比熱量が増加することにより燃焼温度が低下し、NOx濃度は減少する。また、このような燃焼温度の低下に伴い、HCやスートの濃度が増加する。また、さらにInert−EGR量を多くすると、燃焼温度の低下により未燃のHCが増加するため、スート濃度は減少する。そこで、これらNOx濃度、HC濃度、及びスート濃度を、できるだけ全て低減するためには、図7中、ハッチングで示す領域内に、Inert−EGR量を制御することが好ましい。
【0043】
そこで、Inert−EGR量のフィードバック制御を行うにあたり、Inert−EGR量を検出する必要があるが、シリンダ内のInert−EGR量を必要な精度で検出でき、かつ、実際のエンジンの運転状況下での使用に耐えうる耐久性を有するセンサは存在しない。また、Inert−EGR量を物理モデルに基づいて推定することが考えられるものの、Inert−EGR量は非線形で予測のしにくい挙動を示す。特に、過渡時における挙動は複雑であり、このような挙動を十分な精度で再現できる簡易な物理モデルを構築するのは容易ではない。また、定常運転であれば、空燃比センサの出力値とEGR率に基づいて、Inert−EGR量を算出することができるものの、過渡運転時にはエア遅れやノイズなどにより、Inert−EGR量の正確な値を推定することが困難である。これに対して、上記実施形態の物理量推定装置は、このようなInert−EGR量の推定にも適用することができる。
【0044】
Inert−EGR量を推定するニューラルネットワークを構築するには、すなわちニューラルネットワークの出力y(u)をInert−EGR量に一致させるためには、入力パラメータベクトルuの成分には、エンジン回転数(u1)、燃料噴射量(u2)、λ値(u3)、過給圧(u4)、吸入空気量(u5)、及びEGR率(u6)の6つのパラメータを含めることが好ましい。また、図3と同様の学習データに基づいて、上記手順によりニューラルネットワークを構築することにより、その出力yを実際のエンジンのInert−EGR量に一致させることができる。
【0045】
図8は、シミュレーションに基づくInert−EGR量の測定値(以下、「シミュレーション値」という)と、実施例2の結果とを比較する図である。図8において、2点鎖線はエンジン回転数を示し、破線はInert−EGR量のシミュレーション値を示し、実線は物理量推定装置によるInert−EGR量の推定値を示す。また、図8では、Inert−EGR量を、図6に示すように全吸気量に対するInert−EGR量の割合で示す。
図8に示すように、物理量推定装置によるInert−EGR量の推定値は、シミュレーション値と高い精度で一致することが検証された。
【0046】
なお、上記実施形態では、中心位置ベクトルtiを、自己組織化マップを用いて決定したが、本発明はこれに限るものではない。中心位置ベクトルtiを決定する自己組織的なクラスタリング手法としては、例えば、ニューラルガス、遺伝的アルゴリズム、粒子群最適化(Particle Swarm Optimization)アルゴリズムや、各種学習ベクトル量子化(Learning Vector Quantization)アルゴリズムなどの既知の手法を用いてもよい。
【符号の説明】
【0047】
1…物理量推定装置
2…ニューラルネットワーク
【特許請求の範囲】
【請求項1】
内燃機関、又は、当該内燃機関の吸排気系あるいは燃焼室の状態を示す所定の物理量を、ニューラルネットワークの出力に基づいて推定する物理量推定装置であって、
前記ニューラルネットワークは、入力パラメータの成分を基底とした空間内に配置された複数の動径基底関数の線形結合により構成され、
前記入力パラメータの空間内における前記複数の動径基底関数のそれぞれの中心位置は、自己組織的なクラスタリング手法により決定されることを特徴とする物理量推定装置。
【請求項2】
前記ニューラルネットワークの学習には、前記内燃機関の過渡運転時に取得されたデータが用いられることを特徴とする請求項1に記載の物理量推定装置。
【請求項1】
内燃機関、又は、当該内燃機関の吸排気系あるいは燃焼室の状態を示す所定の物理量を、ニューラルネットワークの出力に基づいて推定する物理量推定装置であって、
前記ニューラルネットワークは、入力パラメータの成分を基底とした空間内に配置された複数の動径基底関数の線形結合により構成され、
前記入力パラメータの空間内における前記複数の動径基底関数のそれぞれの中心位置は、自己組織的なクラスタリング手法により決定されることを特徴とする物理量推定装置。
【請求項2】
前記ニューラルネットワークの学習には、前記内燃機関の過渡運転時に取得されたデータが用いられることを特徴とする請求項1に記載の物理量推定装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−132915(P2011−132915A)
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願番号】特願2009−294651(P2009−294651)
【出願日】平成21年12月25日(2009.12.25)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願日】平成21年12月25日(2009.12.25)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]