
特に干渉測定法を用いてタイヤを調べる装置とその方法
中心点(M)、軸方向(z)での幅(B1、B2)、及び軸方向(z)と直交するタイヤ面(RME、RME1、RME2、MBE)での直径(D1、D2)を持つタイヤ(10)を試験する装置はタイヤ(10)の走査に利用可能な走査ヘッド(20)を含む。その装置は、走査ヘッド(20)を観察場所に配置して観察方向に向けるのに利用可能な位置決め手段(30)も含む。位置決め手段(30)は制御/表示手段(40)で制御可能である。制御/表示手段(40)は、走査ヘッド(20)の位置の座標を入力するのに利用可能なユーザ領域(44、45、45、47)を少なくとも1つ含む。それとは別に、又はそれに加えて、制御/表示手段(40)は、走査ヘッド(20)の位置の座標の表示に利用可能な表示領域(44、45、45、47)を少なくとも1つ含む。その座標は、タイヤ(10)の中心点(M)を通って軸方向(z)に延びる回転軸(R)とタイヤ面(RME、RME1、RME2、MBE)との交点に原点(0)を置く座標系で定義される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、中心点、軸方向での幅、及び、軸方向と直交するタイヤ面での直径で特徴付けられるタイヤを試験する装置に関する。その装置は特に干渉計による走査法を用いてタイヤを試験可能であり、タイヤを走査して走査結果を得る走査ヘッドを有する。加えて、その装置は、その走査ヘッドを特定の場所に移動させ、すなわち観察場所に配置し、かつ観察方向に向ける位置決め手段を有する。その位置決め手段は制御/表示手段を利用して制御可能であり、一般にその走査結果を表示可能である。本発明は更に、そのような装置を適用可能なタイヤの試験方法に関する。
【背景技術】
【0002】
タイヤは、品質の検査及び安全上の危険因子の低減を目的として材料試験を受ける。それにより、不良箇所、いわゆる傷を認めることができる。特に中古のタイヤを再生する場合は原則として非破壊材料試験を行い、一連の検査を確実に、比較的速く行う。この目的で工業的にしばしば行われるのが、例えば、ホログラフィ、又は、スペックルパターンひずみ干渉法(speckle pattern shearing interferometry)とも呼ばれるシェアログラフィ(shearography)などの光学的な測定方法である。シェアログラフィは、検査対象の時間的に異なる2つの状態の間の差を示す測定結果を画像で与える相対干渉測定法である。測定結果の画像化は今日ではデジタル的に行うのが原則であり、CCDセンサなどの電子式イメージセンサの人気が高まっているので、2回の走査の間では検査対象の状態を、機械、熱、又は圧縮空気の力を利用して修正することが必要になっている。この理由により、例えば特許文献1で知られている試験装置は圧力チャンバを有する。その圧力チャンバを加圧し、又は減圧することにより、その圧力チャンバの中に設置されたタイヤが圧力変化で変形し、第1の基準状態から第2の走査対象の状態へと変形する。
【0003】
ホログラフィとは異なり、シェアログラフィは検査対象の表面の変形ではなく、その変形の勾配を読み取る。これはシェアログラフィが、いわゆるシアリング素子(shearing element)を用いるからである。シアリング素子は、例えば、光学くさび(optical wedge)、光学複プリズム(optical biprism)、又はマイケルソン干渉計(Michelson interferometer)などの光学式ひずみ測定器(shearoptic assembly)であり、画像の二重化(image doubling)を行い、すなわち、検査対象の画像を2つ、空間的にわずかにずらして重ねてそれらを干渉させることにより、インターフェログラム(interferogram)を生成する。変形の勾配を特徴づけるシェアログラム(shearogram)は、基準状態と走査対象の状態とのそれぞれで得られたインターフェログラムの強度の差を求めることによって生成される。シェアログラムは、検査対象の変形に伴ってある点が隣接点に対して変位したか否かを示す。もし変位していれば、その距離の違いが強度分布における局所的な変化として生じ、傷に関する情報を与える。スペックル干渉計に基づく干渉計による走査方法は、特許文献2及び特許文献3に記載されている。
【0004】
特許文献1には、試験対象のタイヤがリム及びディスクなしで圧力チャンバ内に横向きに寝かされて配置されるタイヤ試験装置が開示されている。このタイヤ試験装置は調節可能な走査ヘッドを有することを特徴とする。その走査ヘッドはタイヤの内周面、内側面、及び外側面から所定の距離に配置可能であり、そのタイヤのカーカス、多くの場合にカーカスとトレッドとの間に挟まれているベルト、及びサイドウォールを検査する。その走査ヘッドは照明器と画像化装置とを複数有することを特徴とする。それにより、タイヤの異なる区域を同時に検査して、検査を比較的速く行う。
【0005】
走査ヘッドの画像化装置は通常、CCD又はCMOSセンサ等の光感知半導体センサを備えたことを特徴とするカメラである。有意な走査結果を得るには、カメラの視野とタイヤの検査対象の区域とを一致させることが必要である。これは通常、走査ヘッドをある観察場所に配置してある観察方向を向かせることによって行われる。それにより、走査対象として選択されたタイヤの区域全体をカメラの視野の中に確実に収める一方、それらの区域を連続させて適切に重ねることにより試験を確実に隙間なく行う。走査ヘッドの観察場所と観察方向とはタイヤの寸法に依存する。従って、特許文献4及び特許文献5によって知られている装置は、例えば、いわゆる光スライスという手段でタイヤを光学的に走査可能にし、このようにして得られたデータに応じて走査ヘッドを配置して方向付けている。この場合の欠点は、タイヤの走査に必要なハードウェアの追加費用がかかることである。
【特許文献1】独国特許出願公開第19944314号明細書
【特許文献2】独国特許出願公開第4231578号明細書
【特許文献3】欧州特許第1014036号明細書
【特許文献4】欧州特許出願公開第1284409号明細書
【特許文献5】独国特許出願公開第10333802号明細書
【発明の開示】
【発明が解決しようとする課題】
【0006】
特に一種類のタイヤを複数、連続して試験する場合であれば、対象とされる各種類のタイヤの試験用に制御/表示手段のメモリにロードされる試験プログラムには、試験対象の種類のタイヤに固有の寸法と、その種類のタイヤに割り当てられた走査ヘッドのパラメータとを保存させていれば普通は十分である。走査ヘッドのパラメータ、すなわち、観察場所及び観察方向は一種類のタイヤに対して一度しか定義する必要はないが、それらは、試験装置の位置決め手段によって決まる基準系に依存する。従って、位置決め手段が異なる試験装置のいずれに対しても、対象とするタイヤに固有の試験プログラムを用いることは不可能である。
【0007】
これに加えて、走査ヘッドのパラメータを知ることは原則として、走査結果の解析には不可欠である。何故なら、その結果が、例えば特許文献3で知られているように、例えば時間をずらせて試験されたタイヤの2つの状態の間での干渉縞、すなわち位相差を示す画像である場合、その結果の画像は多くの場合、その得られた画像に割り当てられた検査区域の場所については検査官に何の表示も与えないので、その画像に表示された傷について検査官には何の表示も与えない。
【0008】
本発明は、走査ヘッドを簡単に制御してその走査結果を確実に解析することによってタイヤを精緻に試験する装置及び方法を提供する、という目的に基づくものである。
【課題を解決するための手段】
【0009】
この目的は、請求項1に記載の装置、及び請求項17に記載の方法によって達成される。その装置の好ましい態様は請求項2から請求項16までに定義され、その方法の好ましい態様は請求項18から請求項21までに定義されている。
【0010】
本発明によるタイヤ試験装置は、タイヤを走査して走査結果を得る走査ヘッドを備えている。その走査ヘッドは、特許文献3に記載されたように、干渉計による走査法を用いてタイヤを試験するように構成されていてもよい。本発明によるこの装置は更に、その走査ヘッドを観察場所に配置してそれを観察方向に向ける位置決め手段を備えている。その位置決め手段は例えば並進と回転との2つの自由度を持ち、制御/表示手段によって制御され、走査結果を例えば走査画像として表示する。
【0011】
制御/表示手段は、走査ヘッドの位置の座標を入力するためのユーザ領域を少なくとも一つ有し、及び/又は走査ヘッドの位置の座標を表示する表示領域を少なくとも一つ有する。その座標は、タイヤの中心点を通って軸方向に延びている回転軸とタイヤ面との交点に原点を置く座標系で定義される。
【0012】
本発明によるタイヤ試験方法は以下のステップを有する。
a)位置決め手段を用いて走査ヘッドを観察場所に配置してその走査ヘッドを観察方向に向けるステップ、
b)制御/表示手段を用いて位置決め手段を制御するステップ、
c)制御/表示手段を用いて走査ヘッドの位置の座標を入力し、及び/又は出力するステップ、
d)その座標を、タイヤの中心点を通って軸方向に延びている回転軸とタイヤ面との交点に原点を置く座標系で定義するステップ。
【0013】
本発明は、走査ヘッドの空間的な位置の入力又は表示については、タイヤ面と回転軸との交点に原点を置く座標系での座標の利用が有利であることの発見に基づく。このようにしてこそ、走査ヘッドの観察場所及び観察方向を、位置決め手段の構成や試験中のタイヤの位置には依存しない、対象とするタイヤに固有の基準系での座標で特徴付けられる。それにより、異なる試験装置で得られた試験結果を比較可能にする。本発明は、タイヤに対する走査ヘッドの観察場所及び観察方向を定義することができ、それらを、対象とするタイヤに固有の試験プログラムに保存することができる。この場合、この試験プログラムはタイヤの試験を始める前に制御/表示手段にロード可能であり、それにより、走査ヘッドを観察場所へ配置して観察方向に向けることができる。試験プログラムは、対象とするタイヤに固有のものであって、利用される試験装置には依存しないので、その試験プログラムによって他の試験装置でもタイヤを試験することができる。
【0014】
座標は好ましくは円筒座標であり、走査ヘッドの観察場所を、その観察場所に対応するタイヤ面上の点と原点との間隔(動径ベクトルr)、その点を通る半径と座標系の軸との間の角度(極角φ)、及び、その観察場所のタイヤ面からの高さによって定義する。
【0015】
タイヤ面は好ましくはタイヤの中心面であり、そのタイヤの中央を軸方向に延びている平面であると理解される。ほとんどの場合そうであるように、タイヤが対称的な構造を持つ場合、その中心面は対称面に一致する。しかし、時として航空機のタイヤのようにタイヤが非対称的な構造を持つ場合、又は、特許文献1に記載されているように、タイヤが横向きに寝かされた状態で試験されてそのタイヤの下側のサイドウォールがタイヤの重みによって無視できないほど変形している場合、そのタイヤの中心面は、そのタイヤのリムの幅方向の中央、すなわちそのタイヤの、いわゆるクラウンを軸方向に通る平面であるのが好都合である。もし、タイヤのクラウンの大きさと共に、タイヤの幅又はリム幅が知られていない場合、座標系の原点を、いわゆる機械基盤の平面に置くのが好都合である。
【0016】
好ましくは位置決め手段を用いて、走査ヘッドは軸方向に移動可能であり、この場合、制御/表示手段は、軸方向での走査ヘッドの空間的オフセットを表示可能な表示領域を有する。それとは別に、又はそれに加えて、制御/表示手段は、軸方向での走査ヘッドの空間的オフセットを入力するためのユーザ領域を有することを特徴としてもよい。
【0017】
本発明による装置の更に好ましい態様では、走査ヘッドは位置決め手段によって半径方向に移動可能である。この場合、制御/表示手段は、半径方向での走査ヘッドの空間的オフセットを表示する表示領域、及び/又は半径方向での走査ヘッドの空間的オフセットを入力するためのユーザ領域を有することを特徴とする。
【0018】
本発明による装置の別の好ましい態様では、走査ヘッドとタイヤとは位置決め手段によって、回転軸の周りに互いに対して回転可能である。この場合、制御/表示手段は、タイヤに対する走査ヘッドの回転角、すなわち極角を表示する表示領域を有する。それとは別に、又はそれに加えて、制御/表示手段は、タイヤに対する走査ヘッドの回転角を入力するためのユーザ領域を有することを特徴としてもよい。
【0019】
本発明による装置の更に別の好ましい態様では、走査ヘッドは位置決め手段を用いて、回転軸に対して垂直な方向を向いている旋回軸の周りに回転可能である。
【0020】
好ましくは、走査ヘッドは、光軸と、その光軸上に位置する主要点とで特徴付けられる結像光学系を備えている。この場合、それは、観察場所が主要点によって定義され、観察方向が光軸によって定義される場合に有利である。観察方向は、主要点から放射される光線の方向に相当し、対象物側の光軸に沿って試験対象のタイヤの表面まで延びている。光軸とタイヤ面とが成す傾斜角は、光軸がタイヤ面と平行に延びている場合に0°であってもよい。制御/表示手段は好ましくは、その傾斜角を表示する表示領域、及び/又は傾斜角を入力して観察方向を定義するためのユーザ領域を有する。
【0021】
タイヤが横向きに寝かされた状態で検査される場合、好ましくは、第1位置決め器と第2位置決め器とは走査ヘッドを、例えば水平方向と鉛直方向とで並進運動させる。第3位置決め器と第4位置決め器とは好ましくは走査ヘッドをタイヤに対して回転運動させる。本発明による装置がこれら4つの位置決め器を全て有することを特徴とする場合、位置決め手段は2つの並進自由度と2つの回転自由度とを持つことを特徴とし、走査ヘッドの正確な配置及び方向付けを確実に行う。用途によっては、位置決め手段の有する位置決め器は4つより少なくても多くてもよい。これに加えて、第1位置決め器及び/又は第2位置決め器は一つの位置決め器に置換可能である。その位置決め器は位置決め手段に、並進自由度は与えないが回転自由度を更に一つ与える。
【0022】
好ましくは、制御/表示手段は走査ヘッド及び位置決め手段から空間的に分離されて構成されてもよく、例えば、インターネットを通してそれらに接続されてもよい。また、制御/表示手段は、コンピュータ、ユーザ領域用の入力装置、及び、表示領域用のモニタを含んでもよい。その入力装置は、例えば、キーボード、マウス、又はタッチスクリーンであってもよい。その場合、表示領域が同時にユーザ領域でもあるユーザインターフェースを制御/表示手段が有するのが有利であることが分かっている。そのようなユーザインターフェースは、例えば、モニタに表示されるグラフィックスのユーザ画面によって実現可能である。
【0023】
干渉計による走査を行う目的では、走査ヘッドは好ましくは、タイヤを照らす照明器、タイヤで反射された光線を干渉パターンにするシアリング素子、及び、そのシアリング素子の光路で干渉光線を受けるように配置された対物レンズを含むカメラを有する。
【0024】
本発明の詳細と更なる利点とは、好ましい実施形態に関する以下の説明から読める。図面ではその実施形態が簡単に図式化されて説明されている。
【発明を実施するための最良の形態】
【0025】
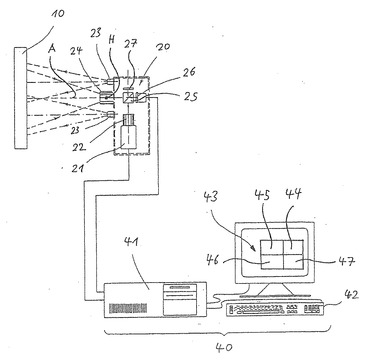
さて、図1を参照すれば、干渉計による走査によってタイヤ10を試験するための装置が示されている。その装置はその目的のために、図6から明らかなとおり、走査ヘッド20、その走査ヘッド20を観察場所へ配置してその走査ヘッド20を観察方向に向ける位置決め手段30、及び制御/表示手段40を特に有する。タイヤ10を2つの異なる変形状態で試験するためには、例えば特許文献1に記載されているように、タイヤ10は圧力チャンバ(図示せず)の中に設置されてもよい。タイヤ10の種々の変形状態を圧力チャンバ内の圧力変化によっては自動的に引き起こしてはならないが、適切な方法及び手段で生じさせることはできる。
【0026】
更に図1から明らかなとおり、走査ヘッド20は、対物レンズ24、対物レンズ22とCCD又はCMOSセンサ等の半導体センサ(図示せず)とを備えたカメラ21、照明器として機能する複数のレーザダイオード23、並びに、ビームスプリッタ25、可動ミラー26、及び固定ミラー27から成るシアリング素子を有する。コヒーレント光を出射するレーザダイオード23を用いてタイヤ10を照らす。タイヤ10の内周面を検査する場合は通常、クラウンショットと呼ばれるように、トレッド11からサイドウォール12、13への移行部分に位置するタイヤ10のベルトの領域とタイヤ10のビードとの両方を照らす。サイドウォール12、13は一般に外側から照らす。必要であれば、トレッド11も外側から照らす。対物レンズ24は、光軸Aと、対象物の側で光軸Aの上に位置する主要点Hとによって特徴付けられる結像光学系を表す。タイヤ10の表面で反射された光線をその対物レンズ24で受けて、シアリング素子25、26、27によって干渉させると共に結像させる。その干渉光線をインターフェログラムとして、シアリング素子25、26、27の光路に配置された対物レンズ22で受けてカメラ21の半導体センサに供給し、そのインターフェログラムを電子的に処理する。
【0027】
その電子的な処理によって生成されたデータは制御/表示手段40に渡される。制御/表示手段40は、そのデータを保存して処理するコンピュータ41、キーボードやマウス(図示せず)といった形態の入力装置42、及びモニタ43を有する。モニタ43は、対象とする用途に応じてはタッチスクリーンとして構成され、それにより、代わりの、又は追加の入力装置を構成してもよい。
【0028】
制御/表示手段40は、第一に、走査ヘッド20でタイヤ10を走査することによって生成された画像といった形態で走査結果を表示する役目を果たす。もう一つ、制御/表示手段40は、位置決め手段30を制御して走査ヘッド20を観察場所に配置して観察方向に向けるという機能を持つ。走査ヘッド20の観察場所及び観察方向は一つの種類のタイヤに対して定義され、コンピュータ41によって試験プログラムに保存される。試験プログラムは、対応するタイヤ10が試験対象とされる度にコンピュータ41にロードされる。これは、タイヤ10の傷の検査の度に観察場所及び観察方向を予め定義する必要がなく、その代わり、その目的で試験プログラムを一回、対象とするタイヤに固有に開発すれば十分であることを意味する。試験プログラムの開発には、使用される走査ヘッド20について光軸A及び/又は主要点Hを定める必要があるかも知れない。その場合、光軸A又は主要点Hは、例えば較正器を利用して位置決め手段30によって較正されるのが好都合である。
【0029】
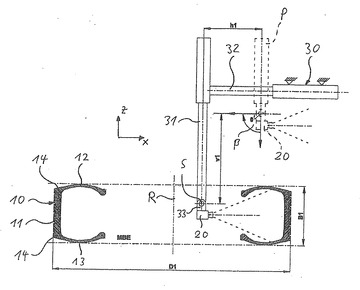
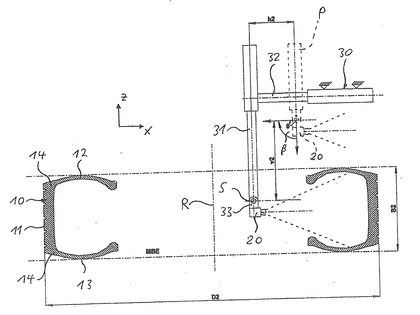
さて、図6及び図7を参照すれば、位置決め手段30が、タイヤ10の軸方向zで走査ヘッド20を移動させる第1位置決め器31を有することが示されている。タイヤ10が横向きに寝かされて試験される場合、軸方向zは鉛直方向に向いている。位置決め手段30は更に、タイヤ10の半径方向xで走査ヘッド20を移動させる第2位置決め器32を有する。タイヤ10が横向きに寝かされて試験される場合、半径方向xは水平方向に向いている。その他に、位置決め手段30は、タイヤ10の中心点Mを通って軸方向zに延びている回転軸Rの周りに走査ヘッド20とタイヤ10とを互いに対して回転させる第3位置決め器(図示せず)を有することを特徴とする。第3位置決め器は例えばターンテーブルとして実現され、その上にタイヤ10が横向きに配置されてもよい。最後に、位置決め手段30は、回転軸Rに対して垂直な方向を向いている旋回軸Sの周りに走査ヘッド20を回転させる第4位置決め器33を有する。
【0030】
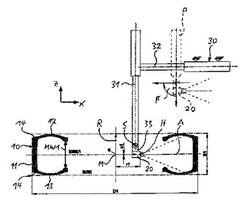
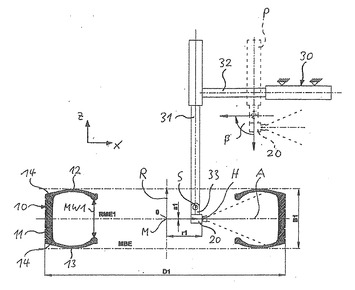
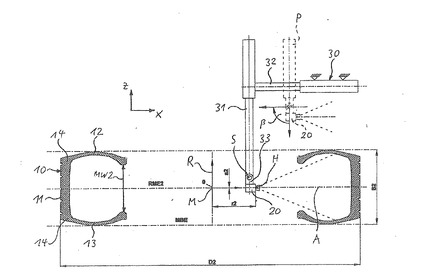
さて、図4を参照すれば、第1位置決め器31が軸方向zでの走査ヘッド20の空間的オフセットaを生成し、第2位置決め器32が半径方向xでの走査ヘッド20の空間的オフセットrを生成することが示されている。それらの空間的オフセットは、対物レンズ24の対象物側に位置する主要点Hに対するものであり、回転軸Rとタイヤの中心面RMEとの交点に原点Oを置く座標系内でのものである。図6及び図7から明らかなとおり、回転軸Rはタイヤ10の中心点Mを通るので、その結果、回転軸Rとタイヤ10のトレッド11との間隔はタイヤ10の直径D1、D2の半分である。タイヤの中心面RME1、RME2はタイヤ10のリム幅MW1、MW2の中央で軸方向zに延びている。タイヤ10が対称的な構造を持つ場合、タイヤの中心面RME1、RME2は更に、図6、図7に示されているように、タイヤ10の幅B1、B2の中央を通って延びている。タイヤ10が横向きに寝かされて試験され、それにより、タイヤ10のサイドウォール12、13の一方が機械基盤の平面MBEに在る場合、特にタイヤ10が比較的重いときは、そのサイドウォール13がタイヤ10の重みによって、もはや無視できないほど変形することが起こり得る。この場合、リム幅MW1、MW2の中央は、タイヤ10に負荷が掛かっていない状態で測定された幅B1、B2の中央から外れる。比較可能なタイヤの試験結果を得るには、原点0を定める中心面RMEはリム幅MW1、MW2の中央に延び、又はタイヤ10のクラウンを通って延びる。そのような場合、その他の方法として、座標系の原点0を回転軸Rと機械基盤の平面MBEとの交点に置いてもよい。この方法は、タイヤ10の幅B1、B2とリム幅MW1、MW2との寸法がタイヤ10のクラウンの位置と共に知られていない場合でも有用である。
【0031】
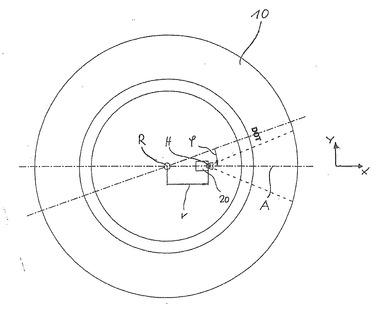
さて、図5を参照すれば、第3位置決め器により、タイヤ中心面RMEでタイヤ10に対する走査ヘッド20の回転角φがどのように生じているのかが示されている。回転角φの頂点は座標系の原点0に位置し、回転角φの片方の足はその座標系の座標軸の一つに相当し、タイヤ10の特定のマークを通っているのが好都合である。この場合、その特定のマークは、特にタイヤ10の製造日を示すDOT番号である。第4位置決め器33によって走査ヘッド20が旋回軸Sの周りで回転することによって生じる旋回角βは、ある平面を基準とするものである。その平面には回転軸Rが位置し、タイヤ10の周方向に上記の座標軸から回転角φだけ回転する。その結果、旋回軸Sは走査ヘッド20の位置でのタイヤ10の接線に対して平行になる。
【0032】
さて、図4を参照すれば、対物レンズ24の主要点Hが旋回軸Sから外れて配置されているのが示されている。走査ヘッド20を所望の観察方向に向けるには、位置決め器33による回転角βの回転では、観察場所を変更しなければ不十分である。そうではなく、観察方向を定める光軸Aとタイヤ中心面RMEとの間の傾斜角αを調節することで観察場所に到達させるには、更に、位置決め器31、32による移動が必要である。
【0033】
制御/表示手段40はグラフィックスのユーザ制御画面を含む。それは、図1で明らかなとおり、モニタ43によって表示される。そのグラフィックスのユーザ制御画面は表示/ユーザ領域44、45、46を含むことを特徴とする。それらにより、走査ヘッド20の軸方向でのオフセットa、半径方向でのオフセットr、及び回転角φ、すなわち観察場所の座標が表示され、入力される。制御/表示手段40はその他に表示/ユーザ領域47を有し、それにより、走査ヘッド20の傾斜角α、すなわち観察方向が表示され、入力される。
【0034】
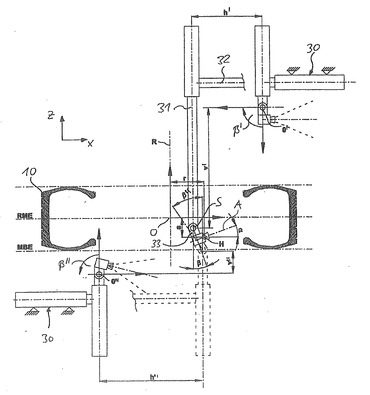
タイヤ10を試験するための上記の装置は、位置決め手段30の構成や試験中でのタイヤ10の位置には依存しない、タイヤに固有の基準系によって特徴づけられる。それは特に、図2及び図3に示されている従来の装置を、図6及び図7に示されている本発明による装置と比較すれば明白になる。図2及び図3に示されている従来の装置では、走査ヘッド20の位置の座標は、位置決め手段30の初期位置に原点0'を置く座標系によって定義される。その初期位置はタイヤ10の上方に位置し、原則として待機場所Pとしても利用される。回転軸Rの周りでの走査ヘッド20とタイヤ10との相対的な回転を無視する場合、走査ヘッド20の空間的な位置は、位置決め器32の水平方向でのオフセットh1、h2、及び位置決め器31の鉛直方向でのオフセットv1、v2で決まる。図2及び図3から明らかなとおり、走査ヘッド20を、例えば図2及び図3に示されているようにクラウンショット用の観察場所に移動させるには、水平方向のオフセットh1、h2と鉛直方向でのオフセットv1、v2との両方が必要である。それらは、機械基盤の平面MBEの上でのタイヤ10の位置と機械基盤の平面MBEからの原点0'の距離とに依存する。
【0035】
さて、図4を参照すれば、従来の装置の位置決め手段30の初期位置、従って、座標系の原点0'、0"の位置が異なる場合が示されている。原点0'、0"の位置が分からなければ、水平方向のオフセットh'、h"、鉛直方向のオフセットv'、v"、及び旋回角β’、β”が分かっても、走査ヘッド20の観察場所及び観察方向に関する情報が何も与えられない。従って、異なる試験装置での走査結果は比較できない。
【0036】
さて、再び図6及び図7を参照すれば、上記の場合とは異なり、本発明による装置の位置決め手段30の軸方向のオフセットa1、a2と半径方向のオフセットr1、r2とは、単にタイヤ10のサイズ、すなわち、タイヤ10の直径D1、D2と幅B1、B2とに依存するだけであることが明らかである。主要点Hの座標は軸方向のオフセットa1、a2と半径方向のオフセットr1、r2とに一致するので、走査ヘッド20の観察場所は、対象とするタイヤに固有である。走査ヘッド20の観察方向についても同様である。観察方向は、位置決め器の初期位置に依存する旋回角βではなく、光軸Aの傾斜角αで決まる。それにより、位置決め手段30の初期位置が異なる装置で走査結果が得られた場合であっても、同じサイズのタイヤの試験結果が比較可能である。
【0037】
最後に重要なこととして、本発明による装置は、結像光学系の光路での偏差を補償可能であるので、方向の誤差を除去可能である。
【図面の簡単な説明】
【0038】
【図1】タイヤ試験装置の走査ヘッド及び制御/表示手段の概略図
【図2】従来の試験装置の位置決め手段と、そのような試験装置で検査される第1サイズのタイヤの断面との概略図
【図3】従来の試験装置で検査される第2サイズのタイヤを示す、図2と同様な概略図
【図4】従来の試験装置と本発明による試験装置との間の違いを示す、図2と同様な概略図
【図5】本発明によるタイヤ試験装置の上面図
【図6】本発明による試験装置を示す、図2と同様な図
【図7】本発明による試験装置を示す、図3と同様な図
【符号の説明】
【0039】
10 タイヤ
11 トレッド
12 サイドウォール
13 サイドウォール
14 ビード
20 走査ヘッド
21 カメラ
22 対物レンズ
23 レーザダイオード
24 対物レンズ
25 ビームスプリッタ
26 可動ミラー
27 固定ミラー
30 位置決め手段
31 位置決め器
32 位置決め器
33 位置決め器
40 制御/表示手段
41 コンピュータ
42 入力装置
43 モニタ
44 表示/ユーザ領域
45 表示/ユーザ領域
46 表示/ユーザ領域
47 表示/ユーザ領域
0 原点
0' 原点
0" 原点
A 光軸
B1 幅
B2 幅
D1 直径
D2 直径
DOT マーク
H 主要点
M 中心点
MBE 機械基盤の平面
MW1 リム幅
MW2 リム幅
P 待機場所
R 回転軸
RME タイヤ中心面
RME1 タイヤ中心面
RME2 タイヤ中心面
S 旋回軸
a 軸方向のオフセット
a1 軸方向のオフセット
a2 軸方向のオフセット
h' 水平方向のオフセット
h" 水平方向のオフセット
h1 水平方向のオフセット
h2 水平方向のオフセット
r 半径方向のオフセット
r1 半径方向のオフセット
r2 半径方向のオフセット
v' 鉛直方向のオフセット
v" 鉛直方向のオフセット
v1 鉛直方向のオフセット
v2 鉛直方向のオフセット
x 水平方向
z 鉛直方向
α 傾斜角
β 旋回軸角度
β’旋回軸角度
φ 回転角
【技術分野】
【0001】
本発明は、中心点、軸方向での幅、及び、軸方向と直交するタイヤ面での直径で特徴付けられるタイヤを試験する装置に関する。その装置は特に干渉計による走査法を用いてタイヤを試験可能であり、タイヤを走査して走査結果を得る走査ヘッドを有する。加えて、その装置は、その走査ヘッドを特定の場所に移動させ、すなわち観察場所に配置し、かつ観察方向に向ける位置決め手段を有する。その位置決め手段は制御/表示手段を利用して制御可能であり、一般にその走査結果を表示可能である。本発明は更に、そのような装置を適用可能なタイヤの試験方法に関する。
【背景技術】
【0002】
タイヤは、品質の検査及び安全上の危険因子の低減を目的として材料試験を受ける。それにより、不良箇所、いわゆる傷を認めることができる。特に中古のタイヤを再生する場合は原則として非破壊材料試験を行い、一連の検査を確実に、比較的速く行う。この目的で工業的にしばしば行われるのが、例えば、ホログラフィ、又は、スペックルパターンひずみ干渉法(speckle pattern shearing interferometry)とも呼ばれるシェアログラフィ(shearography)などの光学的な測定方法である。シェアログラフィは、検査対象の時間的に異なる2つの状態の間の差を示す測定結果を画像で与える相対干渉測定法である。測定結果の画像化は今日ではデジタル的に行うのが原則であり、CCDセンサなどの電子式イメージセンサの人気が高まっているので、2回の走査の間では検査対象の状態を、機械、熱、又は圧縮空気の力を利用して修正することが必要になっている。この理由により、例えば特許文献1で知られている試験装置は圧力チャンバを有する。その圧力チャンバを加圧し、又は減圧することにより、その圧力チャンバの中に設置されたタイヤが圧力変化で変形し、第1の基準状態から第2の走査対象の状態へと変形する。
【0003】
ホログラフィとは異なり、シェアログラフィは検査対象の表面の変形ではなく、その変形の勾配を読み取る。これはシェアログラフィが、いわゆるシアリング素子(shearing element)を用いるからである。シアリング素子は、例えば、光学くさび(optical wedge)、光学複プリズム(optical biprism)、又はマイケルソン干渉計(Michelson interferometer)などの光学式ひずみ測定器(shearoptic assembly)であり、画像の二重化(image doubling)を行い、すなわち、検査対象の画像を2つ、空間的にわずかにずらして重ねてそれらを干渉させることにより、インターフェログラム(interferogram)を生成する。変形の勾配を特徴づけるシェアログラム(shearogram)は、基準状態と走査対象の状態とのそれぞれで得られたインターフェログラムの強度の差を求めることによって生成される。シェアログラムは、検査対象の変形に伴ってある点が隣接点に対して変位したか否かを示す。もし変位していれば、その距離の違いが強度分布における局所的な変化として生じ、傷に関する情報を与える。スペックル干渉計に基づく干渉計による走査方法は、特許文献2及び特許文献3に記載されている。
【0004】
特許文献1には、試験対象のタイヤがリム及びディスクなしで圧力チャンバ内に横向きに寝かされて配置されるタイヤ試験装置が開示されている。このタイヤ試験装置は調節可能な走査ヘッドを有することを特徴とする。その走査ヘッドはタイヤの内周面、内側面、及び外側面から所定の距離に配置可能であり、そのタイヤのカーカス、多くの場合にカーカスとトレッドとの間に挟まれているベルト、及びサイドウォールを検査する。その走査ヘッドは照明器と画像化装置とを複数有することを特徴とする。それにより、タイヤの異なる区域を同時に検査して、検査を比較的速く行う。
【0005】
走査ヘッドの画像化装置は通常、CCD又はCMOSセンサ等の光感知半導体センサを備えたことを特徴とするカメラである。有意な走査結果を得るには、カメラの視野とタイヤの検査対象の区域とを一致させることが必要である。これは通常、走査ヘッドをある観察場所に配置してある観察方向を向かせることによって行われる。それにより、走査対象として選択されたタイヤの区域全体をカメラの視野の中に確実に収める一方、それらの区域を連続させて適切に重ねることにより試験を確実に隙間なく行う。走査ヘッドの観察場所と観察方向とはタイヤの寸法に依存する。従って、特許文献4及び特許文献5によって知られている装置は、例えば、いわゆる光スライスという手段でタイヤを光学的に走査可能にし、このようにして得られたデータに応じて走査ヘッドを配置して方向付けている。この場合の欠点は、タイヤの走査に必要なハードウェアの追加費用がかかることである。
【特許文献1】独国特許出願公開第19944314号明細書
【特許文献2】独国特許出願公開第4231578号明細書
【特許文献3】欧州特許第1014036号明細書
【特許文献4】欧州特許出願公開第1284409号明細書
【特許文献5】独国特許出願公開第10333802号明細書
【発明の開示】
【発明が解決しようとする課題】
【0006】
特に一種類のタイヤを複数、連続して試験する場合であれば、対象とされる各種類のタイヤの試験用に制御/表示手段のメモリにロードされる試験プログラムには、試験対象の種類のタイヤに固有の寸法と、その種類のタイヤに割り当てられた走査ヘッドのパラメータとを保存させていれば普通は十分である。走査ヘッドのパラメータ、すなわち、観察場所及び観察方向は一種類のタイヤに対して一度しか定義する必要はないが、それらは、試験装置の位置決め手段によって決まる基準系に依存する。従って、位置決め手段が異なる試験装置のいずれに対しても、対象とするタイヤに固有の試験プログラムを用いることは不可能である。
【0007】
これに加えて、走査ヘッドのパラメータを知ることは原則として、走査結果の解析には不可欠である。何故なら、その結果が、例えば特許文献3で知られているように、例えば時間をずらせて試験されたタイヤの2つの状態の間での干渉縞、すなわち位相差を示す画像である場合、その結果の画像は多くの場合、その得られた画像に割り当てられた検査区域の場所については検査官に何の表示も与えないので、その画像に表示された傷について検査官には何の表示も与えない。
【0008】
本発明は、走査ヘッドを簡単に制御してその走査結果を確実に解析することによってタイヤを精緻に試験する装置及び方法を提供する、という目的に基づくものである。
【課題を解決するための手段】
【0009】
この目的は、請求項1に記載の装置、及び請求項17に記載の方法によって達成される。その装置の好ましい態様は請求項2から請求項16までに定義され、その方法の好ましい態様は請求項18から請求項21までに定義されている。
【0010】
本発明によるタイヤ試験装置は、タイヤを走査して走査結果を得る走査ヘッドを備えている。その走査ヘッドは、特許文献3に記載されたように、干渉計による走査法を用いてタイヤを試験するように構成されていてもよい。本発明によるこの装置は更に、その走査ヘッドを観察場所に配置してそれを観察方向に向ける位置決め手段を備えている。その位置決め手段は例えば並進と回転との2つの自由度を持ち、制御/表示手段によって制御され、走査結果を例えば走査画像として表示する。
【0011】
制御/表示手段は、走査ヘッドの位置の座標を入力するためのユーザ領域を少なくとも一つ有し、及び/又は走査ヘッドの位置の座標を表示する表示領域を少なくとも一つ有する。その座標は、タイヤの中心点を通って軸方向に延びている回転軸とタイヤ面との交点に原点を置く座標系で定義される。
【0012】
本発明によるタイヤ試験方法は以下のステップを有する。
a)位置決め手段を用いて走査ヘッドを観察場所に配置してその走査ヘッドを観察方向に向けるステップ、
b)制御/表示手段を用いて位置決め手段を制御するステップ、
c)制御/表示手段を用いて走査ヘッドの位置の座標を入力し、及び/又は出力するステップ、
d)その座標を、タイヤの中心点を通って軸方向に延びている回転軸とタイヤ面との交点に原点を置く座標系で定義するステップ。
【0013】
本発明は、走査ヘッドの空間的な位置の入力又は表示については、タイヤ面と回転軸との交点に原点を置く座標系での座標の利用が有利であることの発見に基づく。このようにしてこそ、走査ヘッドの観察場所及び観察方向を、位置決め手段の構成や試験中のタイヤの位置には依存しない、対象とするタイヤに固有の基準系での座標で特徴付けられる。それにより、異なる試験装置で得られた試験結果を比較可能にする。本発明は、タイヤに対する走査ヘッドの観察場所及び観察方向を定義することができ、それらを、対象とするタイヤに固有の試験プログラムに保存することができる。この場合、この試験プログラムはタイヤの試験を始める前に制御/表示手段にロード可能であり、それにより、走査ヘッドを観察場所へ配置して観察方向に向けることができる。試験プログラムは、対象とするタイヤに固有のものであって、利用される試験装置には依存しないので、その試験プログラムによって他の試験装置でもタイヤを試験することができる。
【0014】
座標は好ましくは円筒座標であり、走査ヘッドの観察場所を、その観察場所に対応するタイヤ面上の点と原点との間隔(動径ベクトルr)、その点を通る半径と座標系の軸との間の角度(極角φ)、及び、その観察場所のタイヤ面からの高さによって定義する。
【0015】
タイヤ面は好ましくはタイヤの中心面であり、そのタイヤの中央を軸方向に延びている平面であると理解される。ほとんどの場合そうであるように、タイヤが対称的な構造を持つ場合、その中心面は対称面に一致する。しかし、時として航空機のタイヤのようにタイヤが非対称的な構造を持つ場合、又は、特許文献1に記載されているように、タイヤが横向きに寝かされた状態で試験されてそのタイヤの下側のサイドウォールがタイヤの重みによって無視できないほど変形している場合、そのタイヤの中心面は、そのタイヤのリムの幅方向の中央、すなわちそのタイヤの、いわゆるクラウンを軸方向に通る平面であるのが好都合である。もし、タイヤのクラウンの大きさと共に、タイヤの幅又はリム幅が知られていない場合、座標系の原点を、いわゆる機械基盤の平面に置くのが好都合である。
【0016】
好ましくは位置決め手段を用いて、走査ヘッドは軸方向に移動可能であり、この場合、制御/表示手段は、軸方向での走査ヘッドの空間的オフセットを表示可能な表示領域を有する。それとは別に、又はそれに加えて、制御/表示手段は、軸方向での走査ヘッドの空間的オフセットを入力するためのユーザ領域を有することを特徴としてもよい。
【0017】
本発明による装置の更に好ましい態様では、走査ヘッドは位置決め手段によって半径方向に移動可能である。この場合、制御/表示手段は、半径方向での走査ヘッドの空間的オフセットを表示する表示領域、及び/又は半径方向での走査ヘッドの空間的オフセットを入力するためのユーザ領域を有することを特徴とする。
【0018】
本発明による装置の別の好ましい態様では、走査ヘッドとタイヤとは位置決め手段によって、回転軸の周りに互いに対して回転可能である。この場合、制御/表示手段は、タイヤに対する走査ヘッドの回転角、すなわち極角を表示する表示領域を有する。それとは別に、又はそれに加えて、制御/表示手段は、タイヤに対する走査ヘッドの回転角を入力するためのユーザ領域を有することを特徴としてもよい。
【0019】
本発明による装置の更に別の好ましい態様では、走査ヘッドは位置決め手段を用いて、回転軸に対して垂直な方向を向いている旋回軸の周りに回転可能である。
【0020】
好ましくは、走査ヘッドは、光軸と、その光軸上に位置する主要点とで特徴付けられる結像光学系を備えている。この場合、それは、観察場所が主要点によって定義され、観察方向が光軸によって定義される場合に有利である。観察方向は、主要点から放射される光線の方向に相当し、対象物側の光軸に沿って試験対象のタイヤの表面まで延びている。光軸とタイヤ面とが成す傾斜角は、光軸がタイヤ面と平行に延びている場合に0°であってもよい。制御/表示手段は好ましくは、その傾斜角を表示する表示領域、及び/又は傾斜角を入力して観察方向を定義するためのユーザ領域を有する。
【0021】
タイヤが横向きに寝かされた状態で検査される場合、好ましくは、第1位置決め器と第2位置決め器とは走査ヘッドを、例えば水平方向と鉛直方向とで並進運動させる。第3位置決め器と第4位置決め器とは好ましくは走査ヘッドをタイヤに対して回転運動させる。本発明による装置がこれら4つの位置決め器を全て有することを特徴とする場合、位置決め手段は2つの並進自由度と2つの回転自由度とを持つことを特徴とし、走査ヘッドの正確な配置及び方向付けを確実に行う。用途によっては、位置決め手段の有する位置決め器は4つより少なくても多くてもよい。これに加えて、第1位置決め器及び/又は第2位置決め器は一つの位置決め器に置換可能である。その位置決め器は位置決め手段に、並進自由度は与えないが回転自由度を更に一つ与える。
【0022】
好ましくは、制御/表示手段は走査ヘッド及び位置決め手段から空間的に分離されて構成されてもよく、例えば、インターネットを通してそれらに接続されてもよい。また、制御/表示手段は、コンピュータ、ユーザ領域用の入力装置、及び、表示領域用のモニタを含んでもよい。その入力装置は、例えば、キーボード、マウス、又はタッチスクリーンであってもよい。その場合、表示領域が同時にユーザ領域でもあるユーザインターフェースを制御/表示手段が有するのが有利であることが分かっている。そのようなユーザインターフェースは、例えば、モニタに表示されるグラフィックスのユーザ画面によって実現可能である。
【0023】
干渉計による走査を行う目的では、走査ヘッドは好ましくは、タイヤを照らす照明器、タイヤで反射された光線を干渉パターンにするシアリング素子、及び、そのシアリング素子の光路で干渉光線を受けるように配置された対物レンズを含むカメラを有する。
【0024】
本発明の詳細と更なる利点とは、好ましい実施形態に関する以下の説明から読める。図面ではその実施形態が簡単に図式化されて説明されている。
【発明を実施するための最良の形態】
【0025】
さて、図1を参照すれば、干渉計による走査によってタイヤ10を試験するための装置が示されている。その装置はその目的のために、図6から明らかなとおり、走査ヘッド20、その走査ヘッド20を観察場所へ配置してその走査ヘッド20を観察方向に向ける位置決め手段30、及び制御/表示手段40を特に有する。タイヤ10を2つの異なる変形状態で試験するためには、例えば特許文献1に記載されているように、タイヤ10は圧力チャンバ(図示せず)の中に設置されてもよい。タイヤ10の種々の変形状態を圧力チャンバ内の圧力変化によっては自動的に引き起こしてはならないが、適切な方法及び手段で生じさせることはできる。
【0026】
更に図1から明らかなとおり、走査ヘッド20は、対物レンズ24、対物レンズ22とCCD又はCMOSセンサ等の半導体センサ(図示せず)とを備えたカメラ21、照明器として機能する複数のレーザダイオード23、並びに、ビームスプリッタ25、可動ミラー26、及び固定ミラー27から成るシアリング素子を有する。コヒーレント光を出射するレーザダイオード23を用いてタイヤ10を照らす。タイヤ10の内周面を検査する場合は通常、クラウンショットと呼ばれるように、トレッド11からサイドウォール12、13への移行部分に位置するタイヤ10のベルトの領域とタイヤ10のビードとの両方を照らす。サイドウォール12、13は一般に外側から照らす。必要であれば、トレッド11も外側から照らす。対物レンズ24は、光軸Aと、対象物の側で光軸Aの上に位置する主要点Hとによって特徴付けられる結像光学系を表す。タイヤ10の表面で反射された光線をその対物レンズ24で受けて、シアリング素子25、26、27によって干渉させると共に結像させる。その干渉光線をインターフェログラムとして、シアリング素子25、26、27の光路に配置された対物レンズ22で受けてカメラ21の半導体センサに供給し、そのインターフェログラムを電子的に処理する。
【0027】
その電子的な処理によって生成されたデータは制御/表示手段40に渡される。制御/表示手段40は、そのデータを保存して処理するコンピュータ41、キーボードやマウス(図示せず)といった形態の入力装置42、及びモニタ43を有する。モニタ43は、対象とする用途に応じてはタッチスクリーンとして構成され、それにより、代わりの、又は追加の入力装置を構成してもよい。
【0028】
制御/表示手段40は、第一に、走査ヘッド20でタイヤ10を走査することによって生成された画像といった形態で走査結果を表示する役目を果たす。もう一つ、制御/表示手段40は、位置決め手段30を制御して走査ヘッド20を観察場所に配置して観察方向に向けるという機能を持つ。走査ヘッド20の観察場所及び観察方向は一つの種類のタイヤに対して定義され、コンピュータ41によって試験プログラムに保存される。試験プログラムは、対応するタイヤ10が試験対象とされる度にコンピュータ41にロードされる。これは、タイヤ10の傷の検査の度に観察場所及び観察方向を予め定義する必要がなく、その代わり、その目的で試験プログラムを一回、対象とするタイヤに固有に開発すれば十分であることを意味する。試験プログラムの開発には、使用される走査ヘッド20について光軸A及び/又は主要点Hを定める必要があるかも知れない。その場合、光軸A又は主要点Hは、例えば較正器を利用して位置決め手段30によって較正されるのが好都合である。
【0029】
さて、図6及び図7を参照すれば、位置決め手段30が、タイヤ10の軸方向zで走査ヘッド20を移動させる第1位置決め器31を有することが示されている。タイヤ10が横向きに寝かされて試験される場合、軸方向zは鉛直方向に向いている。位置決め手段30は更に、タイヤ10の半径方向xで走査ヘッド20を移動させる第2位置決め器32を有する。タイヤ10が横向きに寝かされて試験される場合、半径方向xは水平方向に向いている。その他に、位置決め手段30は、タイヤ10の中心点Mを通って軸方向zに延びている回転軸Rの周りに走査ヘッド20とタイヤ10とを互いに対して回転させる第3位置決め器(図示せず)を有することを特徴とする。第3位置決め器は例えばターンテーブルとして実現され、その上にタイヤ10が横向きに配置されてもよい。最後に、位置決め手段30は、回転軸Rに対して垂直な方向を向いている旋回軸Sの周りに走査ヘッド20を回転させる第4位置決め器33を有する。
【0030】
さて、図4を参照すれば、第1位置決め器31が軸方向zでの走査ヘッド20の空間的オフセットaを生成し、第2位置決め器32が半径方向xでの走査ヘッド20の空間的オフセットrを生成することが示されている。それらの空間的オフセットは、対物レンズ24の対象物側に位置する主要点Hに対するものであり、回転軸Rとタイヤの中心面RMEとの交点に原点Oを置く座標系内でのものである。図6及び図7から明らかなとおり、回転軸Rはタイヤ10の中心点Mを通るので、その結果、回転軸Rとタイヤ10のトレッド11との間隔はタイヤ10の直径D1、D2の半分である。タイヤの中心面RME1、RME2はタイヤ10のリム幅MW1、MW2の中央で軸方向zに延びている。タイヤ10が対称的な構造を持つ場合、タイヤの中心面RME1、RME2は更に、図6、図7に示されているように、タイヤ10の幅B1、B2の中央を通って延びている。タイヤ10が横向きに寝かされて試験され、それにより、タイヤ10のサイドウォール12、13の一方が機械基盤の平面MBEに在る場合、特にタイヤ10が比較的重いときは、そのサイドウォール13がタイヤ10の重みによって、もはや無視できないほど変形することが起こり得る。この場合、リム幅MW1、MW2の中央は、タイヤ10に負荷が掛かっていない状態で測定された幅B1、B2の中央から外れる。比較可能なタイヤの試験結果を得るには、原点0を定める中心面RMEはリム幅MW1、MW2の中央に延び、又はタイヤ10のクラウンを通って延びる。そのような場合、その他の方法として、座標系の原点0を回転軸Rと機械基盤の平面MBEとの交点に置いてもよい。この方法は、タイヤ10の幅B1、B2とリム幅MW1、MW2との寸法がタイヤ10のクラウンの位置と共に知られていない場合でも有用である。
【0031】
さて、図5を参照すれば、第3位置決め器により、タイヤ中心面RMEでタイヤ10に対する走査ヘッド20の回転角φがどのように生じているのかが示されている。回転角φの頂点は座標系の原点0に位置し、回転角φの片方の足はその座標系の座標軸の一つに相当し、タイヤ10の特定のマークを通っているのが好都合である。この場合、その特定のマークは、特にタイヤ10の製造日を示すDOT番号である。第4位置決め器33によって走査ヘッド20が旋回軸Sの周りで回転することによって生じる旋回角βは、ある平面を基準とするものである。その平面には回転軸Rが位置し、タイヤ10の周方向に上記の座標軸から回転角φだけ回転する。その結果、旋回軸Sは走査ヘッド20の位置でのタイヤ10の接線に対して平行になる。
【0032】
さて、図4を参照すれば、対物レンズ24の主要点Hが旋回軸Sから外れて配置されているのが示されている。走査ヘッド20を所望の観察方向に向けるには、位置決め器33による回転角βの回転では、観察場所を変更しなければ不十分である。そうではなく、観察方向を定める光軸Aとタイヤ中心面RMEとの間の傾斜角αを調節することで観察場所に到達させるには、更に、位置決め器31、32による移動が必要である。
【0033】
制御/表示手段40はグラフィックスのユーザ制御画面を含む。それは、図1で明らかなとおり、モニタ43によって表示される。そのグラフィックスのユーザ制御画面は表示/ユーザ領域44、45、46を含むことを特徴とする。それらにより、走査ヘッド20の軸方向でのオフセットa、半径方向でのオフセットr、及び回転角φ、すなわち観察場所の座標が表示され、入力される。制御/表示手段40はその他に表示/ユーザ領域47を有し、それにより、走査ヘッド20の傾斜角α、すなわち観察方向が表示され、入力される。
【0034】
タイヤ10を試験するための上記の装置は、位置決め手段30の構成や試験中でのタイヤ10の位置には依存しない、タイヤに固有の基準系によって特徴づけられる。それは特に、図2及び図3に示されている従来の装置を、図6及び図7に示されている本発明による装置と比較すれば明白になる。図2及び図3に示されている従来の装置では、走査ヘッド20の位置の座標は、位置決め手段30の初期位置に原点0'を置く座標系によって定義される。その初期位置はタイヤ10の上方に位置し、原則として待機場所Pとしても利用される。回転軸Rの周りでの走査ヘッド20とタイヤ10との相対的な回転を無視する場合、走査ヘッド20の空間的な位置は、位置決め器32の水平方向でのオフセットh1、h2、及び位置決め器31の鉛直方向でのオフセットv1、v2で決まる。図2及び図3から明らかなとおり、走査ヘッド20を、例えば図2及び図3に示されているようにクラウンショット用の観察場所に移動させるには、水平方向のオフセットh1、h2と鉛直方向でのオフセットv1、v2との両方が必要である。それらは、機械基盤の平面MBEの上でのタイヤ10の位置と機械基盤の平面MBEからの原点0'の距離とに依存する。
【0035】
さて、図4を参照すれば、従来の装置の位置決め手段30の初期位置、従って、座標系の原点0'、0"の位置が異なる場合が示されている。原点0'、0"の位置が分からなければ、水平方向のオフセットh'、h"、鉛直方向のオフセットv'、v"、及び旋回角β’、β”が分かっても、走査ヘッド20の観察場所及び観察方向に関する情報が何も与えられない。従って、異なる試験装置での走査結果は比較できない。
【0036】
さて、再び図6及び図7を参照すれば、上記の場合とは異なり、本発明による装置の位置決め手段30の軸方向のオフセットa1、a2と半径方向のオフセットr1、r2とは、単にタイヤ10のサイズ、すなわち、タイヤ10の直径D1、D2と幅B1、B2とに依存するだけであることが明らかである。主要点Hの座標は軸方向のオフセットa1、a2と半径方向のオフセットr1、r2とに一致するので、走査ヘッド20の観察場所は、対象とするタイヤに固有である。走査ヘッド20の観察方向についても同様である。観察方向は、位置決め器の初期位置に依存する旋回角βではなく、光軸Aの傾斜角αで決まる。それにより、位置決め手段30の初期位置が異なる装置で走査結果が得られた場合であっても、同じサイズのタイヤの試験結果が比較可能である。
【0037】
最後に重要なこととして、本発明による装置は、結像光学系の光路での偏差を補償可能であるので、方向の誤差を除去可能である。
【図面の簡単な説明】
【0038】
【図1】タイヤ試験装置の走査ヘッド及び制御/表示手段の概略図
【図2】従来の試験装置の位置決め手段と、そのような試験装置で検査される第1サイズのタイヤの断面との概略図
【図3】従来の試験装置で検査される第2サイズのタイヤを示す、図2と同様な概略図
【図4】従来の試験装置と本発明による試験装置との間の違いを示す、図2と同様な概略図
【図5】本発明によるタイヤ試験装置の上面図
【図6】本発明による試験装置を示す、図2と同様な図
【図7】本発明による試験装置を示す、図3と同様な図
【符号の説明】
【0039】
10 タイヤ
11 トレッド
12 サイドウォール
13 サイドウォール
14 ビード
20 走査ヘッド
21 カメラ
22 対物レンズ
23 レーザダイオード
24 対物レンズ
25 ビームスプリッタ
26 可動ミラー
27 固定ミラー
30 位置決め手段
31 位置決め器
32 位置決め器
33 位置決め器
40 制御/表示手段
41 コンピュータ
42 入力装置
43 モニタ
44 表示/ユーザ領域
45 表示/ユーザ領域
46 表示/ユーザ領域
47 表示/ユーザ領域
0 原点
0' 原点
0" 原点
A 光軸
B1 幅
B2 幅
D1 直径
D2 直径
DOT マーク
H 主要点
M 中心点
MBE 機械基盤の平面
MW1 リム幅
MW2 リム幅
P 待機場所
R 回転軸
RME タイヤ中心面
RME1 タイヤ中心面
RME2 タイヤ中心面
S 旋回軸
a 軸方向のオフセット
a1 軸方向のオフセット
a2 軸方向のオフセット
h' 水平方向のオフセット
h" 水平方向のオフセット
h1 水平方向のオフセット
h2 水平方向のオフセット
r 半径方向のオフセット
r1 半径方向のオフセット
r2 半径方向のオフセット
v' 鉛直方向のオフセット
v" 鉛直方向のオフセット
v1 鉛直方向のオフセット
v2 鉛直方向のオフセット
x 水平方向
z 鉛直方向
α 傾斜角
β 旋回軸角度
β’旋回軸角度
φ 回転角
【特許請求の範囲】
【請求項1】
中心点(M)、軸方向(z)での幅(B1、B2)、及び、軸方向(z)と直交するタイヤ面(RME、RME1、RME2、MBE)での直径(D1、D2)で特徴付けられるタイヤ(10)を試験する装置であって、
タイヤ(10)を走査する走査ヘッド(20)、
前記走査ヘッド(20)を観察場所に配置して、前記走査ヘッド(20)を観察方向に向ける位置決め手段(30)、及び、
前記位置決め手段(30)を制御する制御/表示手段(40)、
を有する装置であり、
前記制御/表示手段(40)は、前記走査ヘッド(20)の位置の座標を入力するためのユーザ領域(44、45、45、47)と、前記走査ヘッド(20)の位置の座標を表示する表示領域(44、45、45、47)とを少なくとも1つずつ含み、
前記座標は、前記タイヤ(10)の中心点(M)を通って軸方向(z)に延びている回転軸(R)とタイヤ面(RME、RME1、RME2、MBE)との交点に原点(0)を置く座標系で定義される、装置。
【請求項2】
前記走査ヘッド(20)は前記位置決め手段(30)によって軸方向(z)に移動可能である、請求項1に記載の装置。
【請求項3】
前記制御/表示手段(40)は、軸方向(z)での前記走査ヘッド(20)の空間的オフセット(a、a1、a2)を表示する表示領域(44)を有する、請求項2に記載の装置。
【請求項4】
前記制御/表示手段(40)は、軸方向(z)での前記走査ヘッド(20)の空間的オフセット(a、a1、a2)を入力するためのユーザ領域(44)を有する、請求項2又は請求項3に記載の装置。
【請求項5】
前記走査ヘッド(20)は前記位置決め手段(30)によって半径方向(x)に移動可能である、請求項1から請求項4までのいずれかに記載の装置。
【請求項6】
前記制御/表示手段(40)は、半径方向(x)での前記走査ヘッド(20)の空間的オフセット(r、r1、r2)を表示する表示領域(45)を有する、請求項5に記載の装置。
【請求項7】
前記制御/表示手段(40)は、半径方向(x)での前記走査ヘッド(20)の空間的オフセット(r、r1、r2)を入力するためのユーザ領域(45)を有する、請求項5又は請求項6に記載の装置。
【請求項8】
前記走査ヘッド(20)と前記タイヤ(10)とは前記位置決め手段(30)によって前記回転軸(R)の周りに互いに対して回転可能である、請求項1から請求項7までのいずれかに記載の装置。
【請求項9】
前記制御/表示手段(40)は、前記タイヤ(10)に対する前記走査ヘッド(20)の回転角(φ)を表示する表示領域(46)を有する、請求項8に記載の装置。
【請求項10】
前記制御/表示手段(40)は、前記タイヤ(10)に対する前記走査ヘッド(20)の回転角(φ)を入力するためのユーザ領域(46)を有する、請求項8又は請求項9に記載の装置。
【請求項11】
前記走査ヘッド(20)は前記位置決め手段(30)によって、前記回転軸(R)に対して垂直な方向を向いている旋回軸(S)の周りに回転可能である、請求項1から請求項10までのいずれかに記載の装置。
【請求項12】
前記走査ヘッド(20)は、光軸(A)と前記光軸(A)の上に位置する主要点(H)とを持つ結像光学系(24)を含むことを特徴とし、前記観察場所は前記主要点(H)によって定義され、前記観察方向は前記光軸(A)によって定義される、請求項1から請求項11までのいずれかに記載の装置。
【請求項13】
前記光軸(A)と前記タイヤ面(RME、RME1、RME2、MBE)とは傾斜角(α)を含み、前記制御/表示手段(40)は、前記傾斜角(α)を表示する表示領域(47)、又は前記傾斜角(α)を入力するためのユーザ領域(47)を有する、請求項12に記載の装置。
【請求項14】
前記制御/表示手段(40)は、コンピュータ(41)、入力装置(42)、及びモニタ(43)を有する、請求項1から請求項13までのいずれかに記載の装置。
【請求項15】
前記制御/表示手段(40)は、前記表示領域(44、45、46、47)がユーザ領域(44、45、46、47)として兼用されているユーザインターフェースを有する、請求項1から請求項14までのいずれかに記載の装置。
【請求項16】
前記走査ヘッド(20)は、前記タイヤ(10)を照らす照明器(23)、前記タイヤ(10)で反射された光線を干渉させるシアリング素子(25、26、27)、及びカメラ(21)を有し、前記カメラ(21)は、前記シアリング素子(25)の光路に干渉光線を受けるように配置された対物レンズ(22)を備えている、請求項1から請求項15までのいずれかに記載の装置。
【請求項17】
中心点(M)、軸方向(z)での幅(B1、B2)、及び、軸方向(z)と直交するタイヤ面(RME、RME1、RME2、MBE)での直径(D1、D2)で特徴付けられるタイヤ(10)を試験する方法であって、
位置決め手段(30)を用いて、前記タイヤ(10)を走査する走査ヘッド(20)を観察場所に配置して前記走査ヘッド(20)を観察方向に向けるステップ、及び、
制御/表示手段(40)を用いて前記位置決め手段(30)を制御するステップ、
を有する方法であり、
前記走査ヘッド(20)の位置の座標は前記制御/表示手段(40)を用いて入力され、又は出力され、
前記座標は、前記タイヤ(10)の中心点(M)を通って軸方向(z)に延びている回転軸(R)とタイヤ面(RME、RME1、RME2、MBE)との交点に原点(0)を置く座標系で定義される、方法。
【請求項18】
前記走査ヘッド(20)は前記位置決め手段(30)を用いて軸方向(z)に移動し、
前記走査ヘッド(20)は前記位置決め手段(30)を用いて半径方向(x)に移動し、
前記走査ヘッド(20)と前記タイヤ(10)とは前記位置決め手段(30)を用いて前記回転軸(R)の周りに互いに対して回転し、又は、
前記走査ヘッド(20)は前記位置決め手段(30)を用いて、前記回転軸(R)に対して垂直な方向を向いている旋回軸(S)の周りに回転する、
請求項17に記載の方法。
【請求項19】
前記走査ヘッド(20)は、光軸(A)と前記光軸(A)の上に位置する主要点(H)とを持つ結像光学系(24)で特徴付けられ、前記観察場所は前記主要点(H)によって定義され、前記観察方向は前記光軸(A)によって定義される、請求項17又は請求項18に記載の方法。
【請求項20】
前記光軸(A)又は前記主要点(H)は前記位置決め手段(30)によって較正される、請求項19に記載の方法。
【請求項21】
前記制御/表示手段(40)の表示領域(44、45、46、47)の少なくとも1つを用いて、又は前記制御/表示手段(40)のユーザ領域(44、45、46、47)の少なくとも1つを用いて、
軸方向(z)での前記走査ヘッド(20)の空間的オフセット(a、a1、a2)、
半径方向(x)での前記走査ヘッド(20)の空間的オフセット(r、r1、r2)、
前記タイヤ(10)に対する前記走査ヘッド(20)の回転角(φ)、又は、
前記光軸(A)と前記タイヤ面(RME、RME1、RME2、MBE)との間の傾斜角(α)、
が表示され、又は入力される、請求項18から請求項20までのいずれかに記載の方法。
【請求項22】
前記走査ヘッド(20)の回転角(φ)は前記タイヤ(10)の所定のマーク、好ましくは前記タイヤ(10)の製造日を示す数(DOT)に相対的に表示される、請求項21に記載の方法。
【請求項23】
前記タイヤ(10)が前記走査ヘッド(20)の照明器(23)を用いて照らされ、前記タイヤ(10)で反射された光線が前記走査ヘッド(20)のシアリング素子(25、26、27)によって干渉を生じ、その干渉光線が、前記シアリング素子(25、26、27)の光路に配置されたカメラ(21)の対物レンズ(22)によって取り込まれる、請求項17から請求項22までのいずれかに記載の方法。
【請求項1】
中心点(M)、軸方向(z)での幅(B1、B2)、及び、軸方向(z)と直交するタイヤ面(RME、RME1、RME2、MBE)での直径(D1、D2)で特徴付けられるタイヤ(10)を試験する装置であって、
タイヤ(10)を走査する走査ヘッド(20)、
前記走査ヘッド(20)を観察場所に配置して、前記走査ヘッド(20)を観察方向に向ける位置決め手段(30)、及び、
前記位置決め手段(30)を制御する制御/表示手段(40)、
を有する装置であり、
前記制御/表示手段(40)は、前記走査ヘッド(20)の位置の座標を入力するためのユーザ領域(44、45、45、47)と、前記走査ヘッド(20)の位置の座標を表示する表示領域(44、45、45、47)とを少なくとも1つずつ含み、
前記座標は、前記タイヤ(10)の中心点(M)を通って軸方向(z)に延びている回転軸(R)とタイヤ面(RME、RME1、RME2、MBE)との交点に原点(0)を置く座標系で定義される、装置。
【請求項2】
前記走査ヘッド(20)は前記位置決め手段(30)によって軸方向(z)に移動可能である、請求項1に記載の装置。
【請求項3】
前記制御/表示手段(40)は、軸方向(z)での前記走査ヘッド(20)の空間的オフセット(a、a1、a2)を表示する表示領域(44)を有する、請求項2に記載の装置。
【請求項4】
前記制御/表示手段(40)は、軸方向(z)での前記走査ヘッド(20)の空間的オフセット(a、a1、a2)を入力するためのユーザ領域(44)を有する、請求項2又は請求項3に記載の装置。
【請求項5】
前記走査ヘッド(20)は前記位置決め手段(30)によって半径方向(x)に移動可能である、請求項1から請求項4までのいずれかに記載の装置。
【請求項6】
前記制御/表示手段(40)は、半径方向(x)での前記走査ヘッド(20)の空間的オフセット(r、r1、r2)を表示する表示領域(45)を有する、請求項5に記載の装置。
【請求項7】
前記制御/表示手段(40)は、半径方向(x)での前記走査ヘッド(20)の空間的オフセット(r、r1、r2)を入力するためのユーザ領域(45)を有する、請求項5又は請求項6に記載の装置。
【請求項8】
前記走査ヘッド(20)と前記タイヤ(10)とは前記位置決め手段(30)によって前記回転軸(R)の周りに互いに対して回転可能である、請求項1から請求項7までのいずれかに記載の装置。
【請求項9】
前記制御/表示手段(40)は、前記タイヤ(10)に対する前記走査ヘッド(20)の回転角(φ)を表示する表示領域(46)を有する、請求項8に記載の装置。
【請求項10】
前記制御/表示手段(40)は、前記タイヤ(10)に対する前記走査ヘッド(20)の回転角(φ)を入力するためのユーザ領域(46)を有する、請求項8又は請求項9に記載の装置。
【請求項11】
前記走査ヘッド(20)は前記位置決め手段(30)によって、前記回転軸(R)に対して垂直な方向を向いている旋回軸(S)の周りに回転可能である、請求項1から請求項10までのいずれかに記載の装置。
【請求項12】
前記走査ヘッド(20)は、光軸(A)と前記光軸(A)の上に位置する主要点(H)とを持つ結像光学系(24)を含むことを特徴とし、前記観察場所は前記主要点(H)によって定義され、前記観察方向は前記光軸(A)によって定義される、請求項1から請求項11までのいずれかに記載の装置。
【請求項13】
前記光軸(A)と前記タイヤ面(RME、RME1、RME2、MBE)とは傾斜角(α)を含み、前記制御/表示手段(40)は、前記傾斜角(α)を表示する表示領域(47)、又は前記傾斜角(α)を入力するためのユーザ領域(47)を有する、請求項12に記載の装置。
【請求項14】
前記制御/表示手段(40)は、コンピュータ(41)、入力装置(42)、及びモニタ(43)を有する、請求項1から請求項13までのいずれかに記載の装置。
【請求項15】
前記制御/表示手段(40)は、前記表示領域(44、45、46、47)がユーザ領域(44、45、46、47)として兼用されているユーザインターフェースを有する、請求項1から請求項14までのいずれかに記載の装置。
【請求項16】
前記走査ヘッド(20)は、前記タイヤ(10)を照らす照明器(23)、前記タイヤ(10)で反射された光線を干渉させるシアリング素子(25、26、27)、及びカメラ(21)を有し、前記カメラ(21)は、前記シアリング素子(25)の光路に干渉光線を受けるように配置された対物レンズ(22)を備えている、請求項1から請求項15までのいずれかに記載の装置。
【請求項17】
中心点(M)、軸方向(z)での幅(B1、B2)、及び、軸方向(z)と直交するタイヤ面(RME、RME1、RME2、MBE)での直径(D1、D2)で特徴付けられるタイヤ(10)を試験する方法であって、
位置決め手段(30)を用いて、前記タイヤ(10)を走査する走査ヘッド(20)を観察場所に配置して前記走査ヘッド(20)を観察方向に向けるステップ、及び、
制御/表示手段(40)を用いて前記位置決め手段(30)を制御するステップ、
を有する方法であり、
前記走査ヘッド(20)の位置の座標は前記制御/表示手段(40)を用いて入力され、又は出力され、
前記座標は、前記タイヤ(10)の中心点(M)を通って軸方向(z)に延びている回転軸(R)とタイヤ面(RME、RME1、RME2、MBE)との交点に原点(0)を置く座標系で定義される、方法。
【請求項18】
前記走査ヘッド(20)は前記位置決め手段(30)を用いて軸方向(z)に移動し、
前記走査ヘッド(20)は前記位置決め手段(30)を用いて半径方向(x)に移動し、
前記走査ヘッド(20)と前記タイヤ(10)とは前記位置決め手段(30)を用いて前記回転軸(R)の周りに互いに対して回転し、又は、
前記走査ヘッド(20)は前記位置決め手段(30)を用いて、前記回転軸(R)に対して垂直な方向を向いている旋回軸(S)の周りに回転する、
請求項17に記載の方法。
【請求項19】
前記走査ヘッド(20)は、光軸(A)と前記光軸(A)の上に位置する主要点(H)とを持つ結像光学系(24)で特徴付けられ、前記観察場所は前記主要点(H)によって定義され、前記観察方向は前記光軸(A)によって定義される、請求項17又は請求項18に記載の方法。
【請求項20】
前記光軸(A)又は前記主要点(H)は前記位置決め手段(30)によって較正される、請求項19に記載の方法。
【請求項21】
前記制御/表示手段(40)の表示領域(44、45、46、47)の少なくとも1つを用いて、又は前記制御/表示手段(40)のユーザ領域(44、45、46、47)の少なくとも1つを用いて、
軸方向(z)での前記走査ヘッド(20)の空間的オフセット(a、a1、a2)、
半径方向(x)での前記走査ヘッド(20)の空間的オフセット(r、r1、r2)、
前記タイヤ(10)に対する前記走査ヘッド(20)の回転角(φ)、又は、
前記光軸(A)と前記タイヤ面(RME、RME1、RME2、MBE)との間の傾斜角(α)、
が表示され、又は入力される、請求項18から請求項20までのいずれかに記載の方法。
【請求項22】
前記走査ヘッド(20)の回転角(φ)は前記タイヤ(10)の所定のマーク、好ましくは前記タイヤ(10)の製造日を示す数(DOT)に相対的に表示される、請求項21に記載の方法。
【請求項23】
前記タイヤ(10)が前記走査ヘッド(20)の照明器(23)を用いて照らされ、前記タイヤ(10)で反射された光線が前記走査ヘッド(20)のシアリング素子(25、26、27)によって干渉を生じ、その干渉光線が、前記シアリング素子(25、26、27)の光路に配置されたカメラ(21)の対物レンズ(22)によって取り込まれる、請求項17から請求項22までのいずれかに記載の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2009−531686(P2009−531686A)
【公表日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願番号】特願2009−502058(P2009−502058)
【出願日】平成19年3月26日(2007.3.26)
【国際出願番号】PCT/EP2007/052878
【国際公開番号】WO2007/110412
【国際公開日】平成19年10月4日(2007.10.4)
【出願人】(508291869)
【氏名又は名称原語表記】MAEHNER,BERNWARD
【出願人】(508291858)
【氏名又は名称原語表記】DENGLER,STEFAN
【Fターム(参考)】
【公表日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願日】平成19年3月26日(2007.3.26)
【国際出願番号】PCT/EP2007/052878
【国際公開番号】WO2007/110412
【国際公開日】平成19年10月4日(2007.10.4)
【出願人】(508291869)
【氏名又は名称原語表記】MAEHNER,BERNWARD
【出願人】(508291858)
【氏名又は名称原語表記】DENGLER,STEFAN
【Fターム(参考)】
[ Back to top ]