
特に練篠フレーム、カード機、精梳綿機などの紡機の牽伸システムにおいて牽伸システム・ローラを加重するために少なくとも一個の圧力媒体シリンダを有する装置
【課題】ピストン・ロッドを備えたピストンの位置を決定する装置を更に改良する。
【解決手段】紡機の牽伸システムにおいて牽伸システム・ローラを加重するために、圧力媒体により作用されると共にシリンダ・ハウジングの内側で軸心方向移動可能となるべく配置されたピストンであって該ピストンからはピストン・ロッドが延在するというピストンを備えた少なくとも一個の圧力媒体シリンダを有する装置であって、上記ピストン・ロッドは上記シリンダ・ハウジングの端部境界を形成する少なくとも一個のシリンダ・カバーを貫通するという装置において、上記ピストン・ロッドを備えた上記ピストンの位置を決定するセンサ機構が配備される。上記装置を更に改良すべく、上記ピストン・ロッドを備えた上記ピストンの位置を決定するために、対向要素の表面に対する距離を距離センサが走査し、且つ、該距離センサは電気的評価デバイスに接続される。
【解決手段】紡機の牽伸システムにおいて牽伸システム・ローラを加重するために、圧力媒体により作用されると共にシリンダ・ハウジングの内側で軸心方向移動可能となるべく配置されたピストンであって該ピストンからはピストン・ロッドが延在するというピストンを備えた少なくとも一個の圧力媒体シリンダを有する装置であって、上記ピストン・ロッドは上記シリンダ・ハウジングの端部境界を形成する少なくとも一個のシリンダ・カバーを貫通するという装置において、上記ピストン・ロッドを備えた上記ピストンの位置を決定するセンサ機構が配備される。上記装置を更に改良すべく、上記ピストン・ロッドを備えた上記ピストンの位置を決定するために、対向要素の表面に対する距離を距離センサが走査し、且つ、該距離センサは電気的評価デバイスに接続される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、特に練篠フレーム、カード機、精梳綿機などの紡機の牽伸システムにおいて牽伸システム・ローラを加重するために、圧力媒体により作用されると共にシリンダ・ハウジングの内側で軸心方向移動可能となるべく配置されたピストンであって該ピストンからはピストン・ロッドが延在するというピストンを備えた少なくとも一個の圧力媒体シリンダを有する装置であって、上記ピストン・ロッドは上記シリンダ・ハウジングの端部境界を形成する少なくとも一個のシリンダ・カバーを貫通し、上記ピストン・ロッドを備えた上記ピストンの位置を決定するセンサ機構が配備されるという装置に関する。
【背景技術】
【0002】
公知の装置(EP 1 428 914 A)においては、スィッチと協働してピストンの位置を決定するスィッチング用ディスクが、変位可能とされるべくピストンと同軸的にピストン・ロッド上に摩擦的に取付けられる。該スィッチング用ディスクは、上記ピストンの位置を決定するスィッチとしての誘導センサと協働するために少なくとも部分的に、永久磁石である。その場合、上側ローラの回りに繊維のラップ(lap)が形成されると、浮動している上記上側ローラは上記圧力媒体シリンダの方向へと加圧される。それ故に、上記上側ローラと接触している上記圧力媒体シリンダの加圧器ロッドは、その縮動端部位置の方向に移動する。上記加圧器ロッドが縮動されたとき、該ロッド上に摩擦的に取付けられた上記スィッチング用ディスクは上記スィッチを閉成し、牽伸システムは作動停止される。上記牽伸システムは次に手作業で開かれ、上記ラップが除去される。次に上記牽伸システムは、加重アームを閉じることにより再び作動位置へともたらされ得る。
【発明の開示】
【発明が解決しようとする課題】
【0003】
本発明の目的は、牽伸システムにおいてピストン・ロッドを備えたピストンの位置を決定する装置を更に改良するに在る。
【課題を解決するための手段】
【0004】
この目的は、請求項1の特徴部分の特徴により達成される。
すなわち1番目の発明によれば、特に練篠フレーム、カード機、精梳綿機などの紡機の牽伸システムにおいて牽伸システム・ローラを加重するために、圧力媒体により作用されると共にシリンダ・ハウジングの内側で軸心方向移動可能となるべく配置されたピストンであって該ピストンからはピストン・ロッドが延在するというピストンを備えた少なくとも一個の圧力媒体シリンダを有する装置であって、上記ピストン・ロッドは上記シリンダ・ハウジングの端部境界を形成する少なくとも一個のシリンダ・カバーを貫通しており、上記ピストン・ロッドを備えた上記ピストンの位置を決定するセンサ機構が配備されるという装置において、上記ピストン・ロッド(19;19a、19b)を備えた上記ピストン(18;18a)の位置を決定するために、光学的距離センサ(40;401、402、403)が対向要素の表面(8’;18’;18”;44’)に対する距離(a)を走査し、且つ、該距離センサ(40;401、402、403)は電気的評価デバイス(45)に接続されることを特徴とする、装置が提供される。
【0005】
本発明に係る上記装置によれば、たとえば距離センサの光学的センサ・ヘッドにより、本体部を含む上記ピストンの両方向すなわち上下方向における移動を監視するために制御技術を使用できる。両方向における上記ピストンの行程の結果として、上記本体部と上記光学的センサとの間の距離は変化し、それ故に上記光学的センサは変化した出力信号を制御手段に送信する。変化した出力信号により、上記制御手段は両方向における上記ピストンの移動を特定できる。更に、上記制御手段は、上記ピストンにより踏破された経路を上記信号から確定できる。厳密な測定と、ラップ形成により引き起こされた上記上側ローラの上方偏位に対する最大値であって上記制御手段に記憶される最大値とにより、障害的な”ラップ形成”を正確に特定できる。故に、障害メッセージが与えられるまでの上方偏位の値は自由にプログラム可能であり且つ必要に応じて変更され得る。斯かる距離測定の更なる利点は、上記上側ローラに対するラップ形成および摩耗の両方の正確な特定が、光学的センサを用いて上記制御手段により自動的に行われることである。上記牽伸システムの上側ローラは通常は、たとえばゴムなどの弾性的カバーを備える。上記機械が新たな上側ローラと共に最初に始動されたとき、上記牽伸システムは閉じられて圧縮空気により作用される。上記光学的センサは該センサと上記ピストンの本体部との間の距離を確定し、その値を上記制御手段に記憶する。確定された値は新たな上側ローラのローラ直径を算出するために使用され、この直径から、(固定されたもしくは可変的なパラメータとして上記制御手段に記憶された)最大摩耗値を減算すると、最小ローラ直径が求められる。上記最小ローラ直径も同様に記憶される。上記上側ローラに対する摩耗および摩滅の結果として、上記距離は次第に大きくなる。上記牽伸システムが閉じられる毎に上記センサを常に較正することにより、上記本体部に対する距離はその都度、確定される。新たに確定された値は、上記上側ローラの現在の直径を構成する。上記制御手段は、現在において確定された直径と、摩耗に対して固定的にプログラムされたパラメータ、すなわち上記上側ローラ用最小直径の記憶された値とを比較する。上記上側ローラの上記最小ローラ直径に到達すると、上記機械は障害モードへと切換わり且つ作動停止する。上記上側ローラは、新たなローラと交換する必要がある。上記機械は、ローラ直径が事前設定された最小ローラ直径よりも大きくなったことが距離測定により示されたときにのみ、再始動され得る。本発明に従い上記加圧器アームの内側にて光学的な距離測定を行うと、ピストンの両方向において耐摩耗的であると共に許容誤差に依存しない絶対的に正確な測定、ならびに、上側ローラに対するラップ形成と摩耗との自動的監視が達成される。必要であれば、上側ローラのラップ形成および摩耗挙動に関して記憶された値の全ては、統計的な目的で上記制御手段から読取られ得る。上記機械は、上側ローラが摩耗している場合には始動され得ない。結果として、摩耗した上側ローラにより引き起こされる材料の浪費は行われ得ない。
【0006】
請求項2乃至27は、本発明の好適な発展例を包含する。
すなわち2番目の発明によれば、1番目の発明において、前記距離センサは固定位置に在り、且つ、前記対向要素は上記距離センサに対して移動可能である。
3番目の発明によれば、1番目または2番目の発明において、前記距離センサは移動可能であり且つ前記対向要素は上記距離センサに対して固定位置に在る。
4番目の発明によれば、1番目から3番目のいずれかの発明において、当該装置はラップの表示のために使用される。
5番目の発明によれば、1番目から4番目のいずれかの発明において、当該装置は前記ローラに対する摩耗を表すために使用される。
6番目の発明によれば、1番目から5番目のいずれかの発明において、前記対向要素は平坦な走査表面を有する。
7番目の発明によれば、1番目から6番目のいずれかの発明において、前記走査表面は光線を反射し得る。
8番目の発明によれば、1番目から7番目のいずれかの発明において、前記距離センサは光センサである。
9番目の発明によれば、1番目から8番目のいずれかの発明において、前記距離センサは送信器および受信器を有する。
10番目の発明によれば、1番目から9番目のいずれかの発明において、前記距離センサはレーザ・センサである。
11番目の発明によれば、1番目から10番目のいずれかの発明において、前記距離センサは可視光線を使用する。
12番目の発明によれば、1番目から11番目のいずれかの発明において、前記距離センサは赤外光を使用する。
13番目の発明によれば、1番目から12番目のいずれかの発明において、位置決定のための前記距離センサは前記対向要素の水平な基部表面に対して90°の角度にて取付けられる。
14番目の発明によれば、1番目から13番目のいずれかの発明において、前記距離センサおよび前記対向要素は閉じられたハウジング内に配置される。
15番目の発明によれば、1番目から14番目のいずれかの発明において、前記距離センサは電気的評価デバイスに接続される。
16番目の発明によれば、1番目から15番目のいずれかの発明において、前記評価デバイスは電子制御/調整デバイスに接続される。
17番目の発明によれば、1番目から16番目のいずれかの発明において、前記距離センサはアナログ・センサである。
18番目の発明によれば、1番目から17番目のいずれかの発明において、前記対向要素の傾斜表面に対する距離を光学距離センサが走査する。
19番目の発明によれば、1番目から18番目のいずれかの発明において、前記牽伸システムは三つの加圧器アームを備えた三個の上側ローラを含む。
20番目の発明によれば、1番目から19番目のいずれかの発明において、前記牽伸システムは四つの加圧器アームそ備えた四個の上側ローラを含む。
21番目の発明によれば、1番目から20番目のいずれかの発明において、前記センサは二方向における前記ピストンの移動を検出し得る。
22番目の発明によれば、1番目から21番目のいずれかの発明において、前記電子制御/調整デバイスは前記ピストンの経路変化を確認できる。
23番目の発明によれば、1番目から22番目のいずれかの発明において、ラップの形成により引き起こされる前記上側ローラの偏位に対する最大値は前記制御/調整デバイスに記憶可能である。
24番目の発明によれば、1番目から23番目のいずれかの発明において、障害メッセージが与えられるまでの偏位の値は自由にプログラム可能である。
25番目の発明によれば、1番目から24番目のいずれかの発明において、前記センサは前記牽伸システムが閉じられる毎に較正可能である。
26番目の発明によれば、1番目から25番目のいずれかの発明において、前記電子制御/調整デバイスは4チャネル評価デバイスを備える。
27番目の発明によれば、1番目から26番目のいずれかの発明において、前記上側ローラのラップ形成および/または摩耗挙動に関連する測定値は記憶可能である。
【発明を実施するための最良の形態】
【0007】
本発明は、図面中に示された実施例を参照して以下に相当に詳細に記述される。
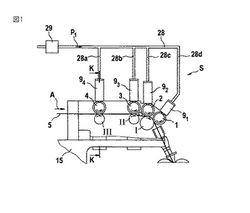
図1は、たとえばTruetzschler練篠フレームTC 03などの練篠フレームの牽伸システムSを示している。牽伸システムSはフォー・オーバー・スリー牽伸システムとして構成され、すなわち該システムは、3個の下側ローラI、II、III(Iは出力下側ローラ、IIは中央下側ローラ、IIIは入力下側ローラ)と、4個の上側ローラ1、2、3、4とから成る。牽伸システムSにおいては、複数本のスライバから成る繊維束5の牽伸が実施される。牽伸操作は、予備牽伸操作および主要牽伸操作から構成される。ローラ対4/IIIおよび3/IIは予備牽伸区域を形成し、ローラ対3/IIおよび1、2/Iは主要牽伸区域を形成する。出力下側ローラIは(不図示の)主要モータにより駆動されることから、吐出速度を決定する。入力下側ローラIIIおよび中央下側ローラIIは、(不図示の)調整モータにより駆動される。上側ローラ1乃至4は、加圧器アーム11a乃至11dにおける加圧器要素91乃至94(加重デバイス(weighting device))により下側ローラI、II、IIIに対して加圧される。加圧器アーム11a乃至11dは、枢動軸受(図3(a)参照)の回りで枢動可能であって、摩擦係合により駆動される。ローラI、II、III;1、2、3、4の回転方向は、湾曲矢印により表される。複数本のスライバから成る繊維束5は、方向Aに進行する。下側ローラI、II、IIIは、機械フレーム15上に配置されたスタンド14に取付けられる。参照番号29は、圧縮空気供給源を表している。
【0008】
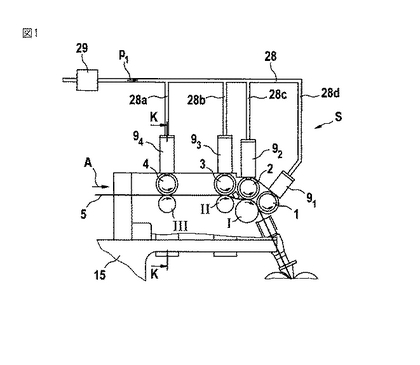
図2に依ると空気圧シリンダ9は、その頂部にては支持要素12aと組み合わされ且つ底部にては保持要素13aと組み合わされる。空気圧シリンダ9は2つの部分17aおよび17bを有するシリンダ・キャビティ17を備えたシリンダ・ユニットを形成し、該キャビティ内では、摺動ブッシュ20内の加圧器ロッド19によりピストン18が案内される。保持ブラケット27内の開口を貫通する上側ローラ4のローラ・ジャーナル4aは、軸受22aに係合する。上側ローラ4を収容している軸受22aは、加圧器ロッド19aと下側ローラIIIのローラ・ジャーナルIIIaとの間の室に延びている。軸受22aは、保持要素13a上のショルダ26により取付けられる。圧力に関しては、メンブレン16がシリンダ・キャビティ17を分割している。シリンダ・キャビティ17の上部において圧力が生成されるために、圧縮空気接続部23により圧縮空気p1がシリンダ・キャビティ17の上部に供給され得る。シリンダ・キャビティ17の下部は、通気ボア24により通気される。対応様式にて、シリンダ・キャビティ17の上部が通気されると共に圧縮空気がシリンダ・キャビティ17の下部に供給されても良い。作動時において、繊維束5が下側ローラI、II、III上を案内された後、各加圧器アーム11は図3(a)に示された作動位置へと枢動されると共にその位置に(不図示の)締着デバイスにより固定されることから、加圧器ローラ1、2、3は圧力を及ぼすことができる。斯かる加圧作用は、一方では加圧器ロッド19の各々が対応する軸受22上に載置するという事実により、他方ではメンブレン16上方における上記キャビティ内で過圧が生成されていることから、引き起こされる。結果として、上側ローラ4と下側ローラ(駆動ローラ)IIIとの間に上述の加圧作用を生成するために、加圧器ロッド19はその他端にて軸受22を加圧する。加圧器ロッド19(ピストン・ロッド)は、矢印D、Eの方向に変位可能である。
【0009】
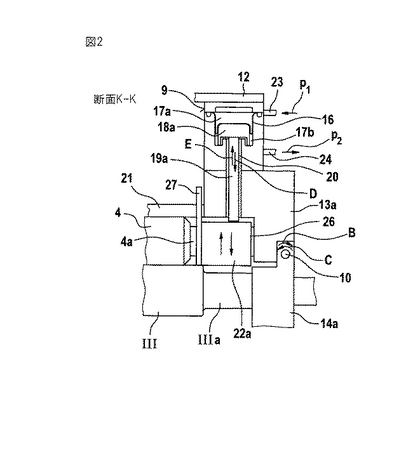
図3(a)および図3(b)に依れば、上側ローラ4は門形状の加圧器アーム11aと組み合わされる。(上側ローラ2乃至4は、対応する不図示の加圧器アーム11と組み合わされる。)加圧器アーム11aは、ガラス繊維強化プラスチックから成るハウジング30の形態をなしていて、射出成形により生成される。ハウジング30は、単体的構成の一体的構成要素であって、支持要素12、二つの加圧要素9a1および9a2(圧力シリンダ)、2個の中間要素31aおよび31b、および、二つの保持要素13aおよび13bを備えた一体的構成要素である。支持要素12aは一側において開放した略々U形状断面のチャネル33の形態をなしていて、その内部には空気圧ライン34および電気導線35が配置される。チャネル33の開放側は着脱可能カバー36により閉成可能である。該カバーは、ガラス繊維強化プラスチックから成ると共に断面が略々U形状であり且つ弾性的であることから、該カバーは圧力嵌め接続によりチャネル33に取付けられる。ハウジング30は好適には、一体片で形成される。夫々の上側ローラ1乃至4を保持して加重する全ての本質的な機能要素を組み合わせた一体的なハウジング30は、この様に経済的に作成される。同時に、加圧器アーム11a乃至11d全体は枢動軸受10の回りで簡素な様式で枢動可能であり、且つ、不図示の繋止デバイスにより繋止および繋止解除され得る。加圧器ロッド19aおよび19bは負荷が解放されると、夫々、上側ローラ4の軸受22aおよび22bから距離b1、b2にて上昇される。
【0010】
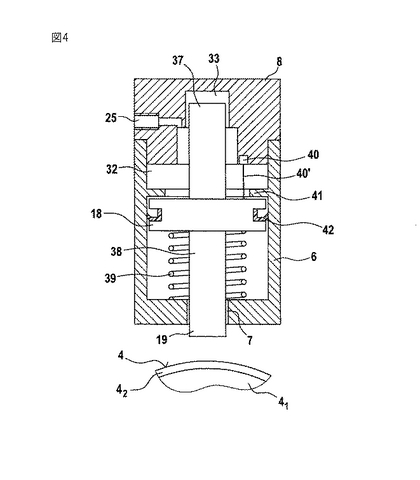
図4に依ると、上記圧縮空気作動式の圧力流体シリンダは、ピストン18が軸心移動可能となるべく配置されたシリンダ・ハウジング6から成る。ピストン18からはピストン・ロッド19(加圧器ロッド)が延びている。ピストン・ロッド19は、ポット状のシリンダ・ハウジング6のカバー側開口7から出現する。シリンダ・ハウジング6の開口7および内壁は、ピストン・ロッド19を備えたピストン18を案内する役割を果たす。ピストン・ロッド19は、最初に記述された様式で、繊維材料に対する牽伸システムの上側ローラ4と協働する。上側ローラ4は金属シリンダ41から成り、該シリンダに対してはエラストマから作成された(断面が中空円筒状である)ローラ・カバー42が取付けられる。開口7から離間した端面については、ポット状のシリンダ・ハウジング6はシリンダ基部8により閉成される。この実施例においてシリンダ・ハウジング6とシリンダ基部8との間の接続は、クリップ接続の形態をなしている。シリンダ基部8は、上記圧力流体シリンダの圧力チャンバ32に作用する圧力流体接続部25を有する。更に、圧力チャンバ32の領域においてシリンダ基部8には案内凹所33が形成されている。案内凹所33は、ピストン・ロッド19に対して同軸的に螺着されて該ロッドの長さ方向延長部を形成する円筒状延長部37に対応している。対応するネジ接続部38は同時に、ピストン18をピストン・ロッド19に取付ける役割も果たす。圧縮スプリング39がピストン18とシリンダ・ハウジング6のカバー6aとの間に配置される。スプリングにより戻り可能なピストン18を用いると、非加圧状態においてピストン18は常に機械的手段により端部位置へと戻される。
【0011】
シリンダ基部8は、距離センサ40を収容すべく配備される。距離計40は、ピストン18の位置を検出するためにシリンダ基部8内において一側に開放された凹所43内に配置される。距離センサ40の光線経路40’は、ピストン・ロッド19のための開口7から離間した方のピストン18の側に配置された圧力チャンバ32を貫通する。更にシリンダ・ハウジング6上には、ピストン18に対する上端停止部として作用すべく半径方向内側に向けられた環状ショルダ41が形成される。参照番号42は、ピストン18とシリンダ・ハウジング6の内壁との間における略々リング状で弾性的な周縁シールを表している。
【0012】
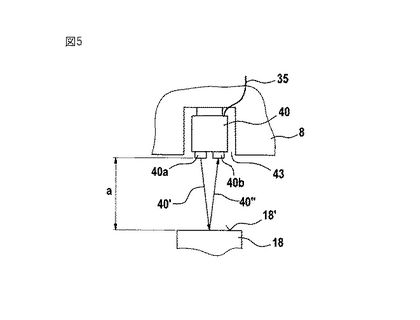
図5に依ると光学距離センサ40は、シリンダ基部8において一側が開放された凹所43内の固定位置に配置される。距離センサ40(光センサ)は、光送信器40aおよび光受信器40bから成る。光送信器40aから発せられた光線40’はピストン18の円滑表面18’により反射され、且つ、反射された光線40”は光受信器40bにより受信される。距離センサ40は、圧力チャンバ32の内側における配置によって、塵埃から保護されている。参照番号35は、電気導線を表している。
【0013】
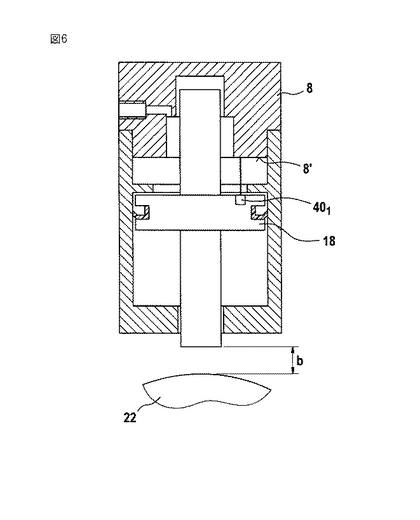
図6に依ると、ピストン18内で一側が開放された凹所内に距離センサ401が配置され、光線はシリンダ基部8の固定された対向表面8’を走査する。
【0014】
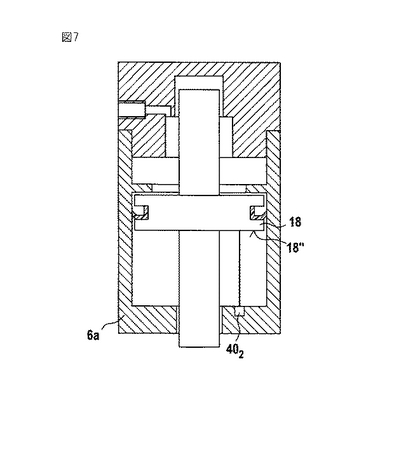
図7に依ると、カバー6aにおける凹所内の固定位置に距離センサ402が配置され、光線はピストン18の対向表面18”を走査する。
【0015】
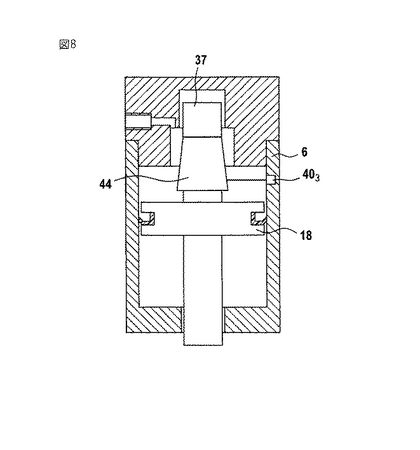
図8に依ると、シリンダ・ハウジング6において一側が開放された凹所内の固定位置に距離計403が配置され、光線は延長部37上に取付けられた斜面形状の対向要素44を走査する。故に光走査器403は、移動可能な傾斜表面を走査する。距離センサ403と対向要素44の基部表面との間における所定距離と、上記基部表面と上記傾斜表面との間における所定の傾斜角度(α)とを考慮し、評価デバイス45(図9参照)は、距離センサ403と対向要素44の上記傾斜表面との間の距離に基づきピストン18の位置を算出する。
【0016】
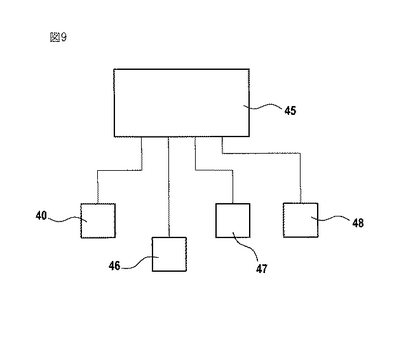
図9に依ると光距離計40は、たとえばマイクロプロセッサを有するマイクロコンピュータである電子制御/調整デバイス45に接続される。更に制御/調整デバイス45は、距離センサ40の測定値と所定の所望値、たとえば最大値および最小値等とを記憶し得るメモリ要素46に接続される。これに加え、制御/調整デバイス45に対しては4チャネル評価デバイス47および表示デバイス48(ラップおよび/または摩耗メッセージ)が接続される。
【0017】
本発明に係る上記装置を用いると、上側ローラ4のローラ・カバー42に対するピストン・ロッド19の接触圧力により、故にピストン18の位置の決定により、ラップおよび摩耗の両方が表され得る。
【図面の簡単な説明】
【0018】
【図1】本発明に係る装置を有する練篠フレームの牽伸システムの概略的側面図である。
【図2】K−K線(図1)に対応する断面において上側ローラ用空気式加重デバイスと共に図1の一部を示す図である。
【図3】(a)一体的ハウジングと2本の加圧器ロッドとを有する加圧器アームの前面図である。(b)図3(a)に係る加圧器アームの斜視図である。
【図4】ピストンに対してシリンダ基部内に配置された距離センサを示す図である。
【図5】送信器および受信器を備えた上記距離センサを示す図である。
【図6】シリンダ基部に対してピストン内に配置された距離センサを示す図である。
【図7】ピストンに対してシリンダ・カバー内に配置された距離センサを示す図である。
【図8】斜面形状対向要素に対してシリンダ・ハウジング内に配置された距離センサを示す図である。
【図9】距離センサ、メモリ要素、4チャネル評価手段および表示デバイスを有する電子制御/調整デバイス(評価デバイス)の概略的ブロック回路図である。
【符号の説明】
【0019】
1、2、3、4 上側ローラ
4a ジャーナル
5 繊維束
6 ハウジング
6a カバー
7 カバー側開口
8 シリンダ基部
8’ 対向表面
9 空気圧シリンダ
9a1、9a2 加圧要素
10 枢動軸受
11、11a、11b、11c、11d 加圧器アーム
12a 支持要素
13a 保持要素
14 スタンド
15 機械フレーム
16 メンブレン
17 キャビティ
17a、17b 部分
18 ピストン
18’ 円滑表面
18” 対向表面
19 ロッド
20 摺動ブッシュ
22 軸受
22a 軸受
23 圧縮空気接続部
24 通気ボア
25 圧力流体接続部
26 ショルダ
27 保持ブラケット
29 圧縮空気供給源
30 ハウジング
31a 中間要素
32 圧力チャンバ
33 チャネル
33 案内凹所
34 空気圧ライン
35 電気導線
36 着脱可能カバー
37 円筒状延長部
38 ネジ接続部
39 圧縮スプリング
40 距離センサ
40’、40” 光線
40a 光送信器
40b 光受信器
41 環状ショルダ
43 凹所
44 対向要素
45 電子制御/調整デバイス
46 メモリ要素
47 4チャネル評価デバイス
48 表示デバイス
91、92、93、94 加圧器要素
401、402、403 距離センサ
I、II、III 下側ローラ
S 牽伸システム
【技術分野】
【0001】
本発明は、特に練篠フレーム、カード機、精梳綿機などの紡機の牽伸システムにおいて牽伸システム・ローラを加重するために、圧力媒体により作用されると共にシリンダ・ハウジングの内側で軸心方向移動可能となるべく配置されたピストンであって該ピストンからはピストン・ロッドが延在するというピストンを備えた少なくとも一個の圧力媒体シリンダを有する装置であって、上記ピストン・ロッドは上記シリンダ・ハウジングの端部境界を形成する少なくとも一個のシリンダ・カバーを貫通し、上記ピストン・ロッドを備えた上記ピストンの位置を決定するセンサ機構が配備されるという装置に関する。
【背景技術】
【0002】
公知の装置(EP 1 428 914 A)においては、スィッチと協働してピストンの位置を決定するスィッチング用ディスクが、変位可能とされるべくピストンと同軸的にピストン・ロッド上に摩擦的に取付けられる。該スィッチング用ディスクは、上記ピストンの位置を決定するスィッチとしての誘導センサと協働するために少なくとも部分的に、永久磁石である。その場合、上側ローラの回りに繊維のラップ(lap)が形成されると、浮動している上記上側ローラは上記圧力媒体シリンダの方向へと加圧される。それ故に、上記上側ローラと接触している上記圧力媒体シリンダの加圧器ロッドは、その縮動端部位置の方向に移動する。上記加圧器ロッドが縮動されたとき、該ロッド上に摩擦的に取付けられた上記スィッチング用ディスクは上記スィッチを閉成し、牽伸システムは作動停止される。上記牽伸システムは次に手作業で開かれ、上記ラップが除去される。次に上記牽伸システムは、加重アームを閉じることにより再び作動位置へともたらされ得る。
【発明の開示】
【発明が解決しようとする課題】
【0003】
本発明の目的は、牽伸システムにおいてピストン・ロッドを備えたピストンの位置を決定する装置を更に改良するに在る。
【課題を解決するための手段】
【0004】
この目的は、請求項1の特徴部分の特徴により達成される。
すなわち1番目の発明によれば、特に練篠フレーム、カード機、精梳綿機などの紡機の牽伸システムにおいて牽伸システム・ローラを加重するために、圧力媒体により作用されると共にシリンダ・ハウジングの内側で軸心方向移動可能となるべく配置されたピストンであって該ピストンからはピストン・ロッドが延在するというピストンを備えた少なくとも一個の圧力媒体シリンダを有する装置であって、上記ピストン・ロッドは上記シリンダ・ハウジングの端部境界を形成する少なくとも一個のシリンダ・カバーを貫通しており、上記ピストン・ロッドを備えた上記ピストンの位置を決定するセンサ機構が配備されるという装置において、上記ピストン・ロッド(19;19a、19b)を備えた上記ピストン(18;18a)の位置を決定するために、光学的距離センサ(40;401、402、403)が対向要素の表面(8’;18’;18”;44’)に対する距離(a)を走査し、且つ、該距離センサ(40;401、402、403)は電気的評価デバイス(45)に接続されることを特徴とする、装置が提供される。
【0005】
本発明に係る上記装置によれば、たとえば距離センサの光学的センサ・ヘッドにより、本体部を含む上記ピストンの両方向すなわち上下方向における移動を監視するために制御技術を使用できる。両方向における上記ピストンの行程の結果として、上記本体部と上記光学的センサとの間の距離は変化し、それ故に上記光学的センサは変化した出力信号を制御手段に送信する。変化した出力信号により、上記制御手段は両方向における上記ピストンの移動を特定できる。更に、上記制御手段は、上記ピストンにより踏破された経路を上記信号から確定できる。厳密な測定と、ラップ形成により引き起こされた上記上側ローラの上方偏位に対する最大値であって上記制御手段に記憶される最大値とにより、障害的な”ラップ形成”を正確に特定できる。故に、障害メッセージが与えられるまでの上方偏位の値は自由にプログラム可能であり且つ必要に応じて変更され得る。斯かる距離測定の更なる利点は、上記上側ローラに対するラップ形成および摩耗の両方の正確な特定が、光学的センサを用いて上記制御手段により自動的に行われることである。上記牽伸システムの上側ローラは通常は、たとえばゴムなどの弾性的カバーを備える。上記機械が新たな上側ローラと共に最初に始動されたとき、上記牽伸システムは閉じられて圧縮空気により作用される。上記光学的センサは該センサと上記ピストンの本体部との間の距離を確定し、その値を上記制御手段に記憶する。確定された値は新たな上側ローラのローラ直径を算出するために使用され、この直径から、(固定されたもしくは可変的なパラメータとして上記制御手段に記憶された)最大摩耗値を減算すると、最小ローラ直径が求められる。上記最小ローラ直径も同様に記憶される。上記上側ローラに対する摩耗および摩滅の結果として、上記距離は次第に大きくなる。上記牽伸システムが閉じられる毎に上記センサを常に較正することにより、上記本体部に対する距離はその都度、確定される。新たに確定された値は、上記上側ローラの現在の直径を構成する。上記制御手段は、現在において確定された直径と、摩耗に対して固定的にプログラムされたパラメータ、すなわち上記上側ローラ用最小直径の記憶された値とを比較する。上記上側ローラの上記最小ローラ直径に到達すると、上記機械は障害モードへと切換わり且つ作動停止する。上記上側ローラは、新たなローラと交換する必要がある。上記機械は、ローラ直径が事前設定された最小ローラ直径よりも大きくなったことが距離測定により示されたときにのみ、再始動され得る。本発明に従い上記加圧器アームの内側にて光学的な距離測定を行うと、ピストンの両方向において耐摩耗的であると共に許容誤差に依存しない絶対的に正確な測定、ならびに、上側ローラに対するラップ形成と摩耗との自動的監視が達成される。必要であれば、上側ローラのラップ形成および摩耗挙動に関して記憶された値の全ては、統計的な目的で上記制御手段から読取られ得る。上記機械は、上側ローラが摩耗している場合には始動され得ない。結果として、摩耗した上側ローラにより引き起こされる材料の浪費は行われ得ない。
【0006】
請求項2乃至27は、本発明の好適な発展例を包含する。
すなわち2番目の発明によれば、1番目の発明において、前記距離センサは固定位置に在り、且つ、前記対向要素は上記距離センサに対して移動可能である。
3番目の発明によれば、1番目または2番目の発明において、前記距離センサは移動可能であり且つ前記対向要素は上記距離センサに対して固定位置に在る。
4番目の発明によれば、1番目から3番目のいずれかの発明において、当該装置はラップの表示のために使用される。
5番目の発明によれば、1番目から4番目のいずれかの発明において、当該装置は前記ローラに対する摩耗を表すために使用される。
6番目の発明によれば、1番目から5番目のいずれかの発明において、前記対向要素は平坦な走査表面を有する。
7番目の発明によれば、1番目から6番目のいずれかの発明において、前記走査表面は光線を反射し得る。
8番目の発明によれば、1番目から7番目のいずれかの発明において、前記距離センサは光センサである。
9番目の発明によれば、1番目から8番目のいずれかの発明において、前記距離センサは送信器および受信器を有する。
10番目の発明によれば、1番目から9番目のいずれかの発明において、前記距離センサはレーザ・センサである。
11番目の発明によれば、1番目から10番目のいずれかの発明において、前記距離センサは可視光線を使用する。
12番目の発明によれば、1番目から11番目のいずれかの発明において、前記距離センサは赤外光を使用する。
13番目の発明によれば、1番目から12番目のいずれかの発明において、位置決定のための前記距離センサは前記対向要素の水平な基部表面に対して90°の角度にて取付けられる。
14番目の発明によれば、1番目から13番目のいずれかの発明において、前記距離センサおよび前記対向要素は閉じられたハウジング内に配置される。
15番目の発明によれば、1番目から14番目のいずれかの発明において、前記距離センサは電気的評価デバイスに接続される。
16番目の発明によれば、1番目から15番目のいずれかの発明において、前記評価デバイスは電子制御/調整デバイスに接続される。
17番目の発明によれば、1番目から16番目のいずれかの発明において、前記距離センサはアナログ・センサである。
18番目の発明によれば、1番目から17番目のいずれかの発明において、前記対向要素の傾斜表面に対する距離を光学距離センサが走査する。
19番目の発明によれば、1番目から18番目のいずれかの発明において、前記牽伸システムは三つの加圧器アームを備えた三個の上側ローラを含む。
20番目の発明によれば、1番目から19番目のいずれかの発明において、前記牽伸システムは四つの加圧器アームそ備えた四個の上側ローラを含む。
21番目の発明によれば、1番目から20番目のいずれかの発明において、前記センサは二方向における前記ピストンの移動を検出し得る。
22番目の発明によれば、1番目から21番目のいずれかの発明において、前記電子制御/調整デバイスは前記ピストンの経路変化を確認できる。
23番目の発明によれば、1番目から22番目のいずれかの発明において、ラップの形成により引き起こされる前記上側ローラの偏位に対する最大値は前記制御/調整デバイスに記憶可能である。
24番目の発明によれば、1番目から23番目のいずれかの発明において、障害メッセージが与えられるまでの偏位の値は自由にプログラム可能である。
25番目の発明によれば、1番目から24番目のいずれかの発明において、前記センサは前記牽伸システムが閉じられる毎に較正可能である。
26番目の発明によれば、1番目から25番目のいずれかの発明において、前記電子制御/調整デバイスは4チャネル評価デバイスを備える。
27番目の発明によれば、1番目から26番目のいずれかの発明において、前記上側ローラのラップ形成および/または摩耗挙動に関連する測定値は記憶可能である。
【発明を実施するための最良の形態】
【0007】
本発明は、図面中に示された実施例を参照して以下に相当に詳細に記述される。
図1は、たとえばTruetzschler練篠フレームTC 03などの練篠フレームの牽伸システムSを示している。牽伸システムSはフォー・オーバー・スリー牽伸システムとして構成され、すなわち該システムは、3個の下側ローラI、II、III(Iは出力下側ローラ、IIは中央下側ローラ、IIIは入力下側ローラ)と、4個の上側ローラ1、2、3、4とから成る。牽伸システムSにおいては、複数本のスライバから成る繊維束5の牽伸が実施される。牽伸操作は、予備牽伸操作および主要牽伸操作から構成される。ローラ対4/IIIおよび3/IIは予備牽伸区域を形成し、ローラ対3/IIおよび1、2/Iは主要牽伸区域を形成する。出力下側ローラIは(不図示の)主要モータにより駆動されることから、吐出速度を決定する。入力下側ローラIIIおよび中央下側ローラIIは、(不図示の)調整モータにより駆動される。上側ローラ1乃至4は、加圧器アーム11a乃至11dにおける加圧器要素91乃至94(加重デバイス(weighting device))により下側ローラI、II、IIIに対して加圧される。加圧器アーム11a乃至11dは、枢動軸受(図3(a)参照)の回りで枢動可能であって、摩擦係合により駆動される。ローラI、II、III;1、2、3、4の回転方向は、湾曲矢印により表される。複数本のスライバから成る繊維束5は、方向Aに進行する。下側ローラI、II、IIIは、機械フレーム15上に配置されたスタンド14に取付けられる。参照番号29は、圧縮空気供給源を表している。
【0008】
図2に依ると空気圧シリンダ9は、その頂部にては支持要素12aと組み合わされ且つ底部にては保持要素13aと組み合わされる。空気圧シリンダ9は2つの部分17aおよび17bを有するシリンダ・キャビティ17を備えたシリンダ・ユニットを形成し、該キャビティ内では、摺動ブッシュ20内の加圧器ロッド19によりピストン18が案内される。保持ブラケット27内の開口を貫通する上側ローラ4のローラ・ジャーナル4aは、軸受22aに係合する。上側ローラ4を収容している軸受22aは、加圧器ロッド19aと下側ローラIIIのローラ・ジャーナルIIIaとの間の室に延びている。軸受22aは、保持要素13a上のショルダ26により取付けられる。圧力に関しては、メンブレン16がシリンダ・キャビティ17を分割している。シリンダ・キャビティ17の上部において圧力が生成されるために、圧縮空気接続部23により圧縮空気p1がシリンダ・キャビティ17の上部に供給され得る。シリンダ・キャビティ17の下部は、通気ボア24により通気される。対応様式にて、シリンダ・キャビティ17の上部が通気されると共に圧縮空気がシリンダ・キャビティ17の下部に供給されても良い。作動時において、繊維束5が下側ローラI、II、III上を案内された後、各加圧器アーム11は図3(a)に示された作動位置へと枢動されると共にその位置に(不図示の)締着デバイスにより固定されることから、加圧器ローラ1、2、3は圧力を及ぼすことができる。斯かる加圧作用は、一方では加圧器ロッド19の各々が対応する軸受22上に載置するという事実により、他方ではメンブレン16上方における上記キャビティ内で過圧が生成されていることから、引き起こされる。結果として、上側ローラ4と下側ローラ(駆動ローラ)IIIとの間に上述の加圧作用を生成するために、加圧器ロッド19はその他端にて軸受22を加圧する。加圧器ロッド19(ピストン・ロッド)は、矢印D、Eの方向に変位可能である。
【0009】
図3(a)および図3(b)に依れば、上側ローラ4は門形状の加圧器アーム11aと組み合わされる。(上側ローラ2乃至4は、対応する不図示の加圧器アーム11と組み合わされる。)加圧器アーム11aは、ガラス繊維強化プラスチックから成るハウジング30の形態をなしていて、射出成形により生成される。ハウジング30は、単体的構成の一体的構成要素であって、支持要素12、二つの加圧要素9a1および9a2(圧力シリンダ)、2個の中間要素31aおよび31b、および、二つの保持要素13aおよび13bを備えた一体的構成要素である。支持要素12aは一側において開放した略々U形状断面のチャネル33の形態をなしていて、その内部には空気圧ライン34および電気導線35が配置される。チャネル33の開放側は着脱可能カバー36により閉成可能である。該カバーは、ガラス繊維強化プラスチックから成ると共に断面が略々U形状であり且つ弾性的であることから、該カバーは圧力嵌め接続によりチャネル33に取付けられる。ハウジング30は好適には、一体片で形成される。夫々の上側ローラ1乃至4を保持して加重する全ての本質的な機能要素を組み合わせた一体的なハウジング30は、この様に経済的に作成される。同時に、加圧器アーム11a乃至11d全体は枢動軸受10の回りで簡素な様式で枢動可能であり、且つ、不図示の繋止デバイスにより繋止および繋止解除され得る。加圧器ロッド19aおよび19bは負荷が解放されると、夫々、上側ローラ4の軸受22aおよび22bから距離b1、b2にて上昇される。
【0010】
図4に依ると、上記圧縮空気作動式の圧力流体シリンダは、ピストン18が軸心移動可能となるべく配置されたシリンダ・ハウジング6から成る。ピストン18からはピストン・ロッド19(加圧器ロッド)が延びている。ピストン・ロッド19は、ポット状のシリンダ・ハウジング6のカバー側開口7から出現する。シリンダ・ハウジング6の開口7および内壁は、ピストン・ロッド19を備えたピストン18を案内する役割を果たす。ピストン・ロッド19は、最初に記述された様式で、繊維材料に対する牽伸システムの上側ローラ4と協働する。上側ローラ4は金属シリンダ41から成り、該シリンダに対してはエラストマから作成された(断面が中空円筒状である)ローラ・カバー42が取付けられる。開口7から離間した端面については、ポット状のシリンダ・ハウジング6はシリンダ基部8により閉成される。この実施例においてシリンダ・ハウジング6とシリンダ基部8との間の接続は、クリップ接続の形態をなしている。シリンダ基部8は、上記圧力流体シリンダの圧力チャンバ32に作用する圧力流体接続部25を有する。更に、圧力チャンバ32の領域においてシリンダ基部8には案内凹所33が形成されている。案内凹所33は、ピストン・ロッド19に対して同軸的に螺着されて該ロッドの長さ方向延長部を形成する円筒状延長部37に対応している。対応するネジ接続部38は同時に、ピストン18をピストン・ロッド19に取付ける役割も果たす。圧縮スプリング39がピストン18とシリンダ・ハウジング6のカバー6aとの間に配置される。スプリングにより戻り可能なピストン18を用いると、非加圧状態においてピストン18は常に機械的手段により端部位置へと戻される。
【0011】
シリンダ基部8は、距離センサ40を収容すべく配備される。距離計40は、ピストン18の位置を検出するためにシリンダ基部8内において一側に開放された凹所43内に配置される。距離センサ40の光線経路40’は、ピストン・ロッド19のための開口7から離間した方のピストン18の側に配置された圧力チャンバ32を貫通する。更にシリンダ・ハウジング6上には、ピストン18に対する上端停止部として作用すべく半径方向内側に向けられた環状ショルダ41が形成される。参照番号42は、ピストン18とシリンダ・ハウジング6の内壁との間における略々リング状で弾性的な周縁シールを表している。
【0012】
図5に依ると光学距離センサ40は、シリンダ基部8において一側が開放された凹所43内の固定位置に配置される。距離センサ40(光センサ)は、光送信器40aおよび光受信器40bから成る。光送信器40aから発せられた光線40’はピストン18の円滑表面18’により反射され、且つ、反射された光線40”は光受信器40bにより受信される。距離センサ40は、圧力チャンバ32の内側における配置によって、塵埃から保護されている。参照番号35は、電気導線を表している。
【0013】
図6に依ると、ピストン18内で一側が開放された凹所内に距離センサ401が配置され、光線はシリンダ基部8の固定された対向表面8’を走査する。
【0014】
図7に依ると、カバー6aにおける凹所内の固定位置に距離センサ402が配置され、光線はピストン18の対向表面18”を走査する。
【0015】
図8に依ると、シリンダ・ハウジング6において一側が開放された凹所内の固定位置に距離計403が配置され、光線は延長部37上に取付けられた斜面形状の対向要素44を走査する。故に光走査器403は、移動可能な傾斜表面を走査する。距離センサ403と対向要素44の基部表面との間における所定距離と、上記基部表面と上記傾斜表面との間における所定の傾斜角度(α)とを考慮し、評価デバイス45(図9参照)は、距離センサ403と対向要素44の上記傾斜表面との間の距離に基づきピストン18の位置を算出する。
【0016】
図9に依ると光距離計40は、たとえばマイクロプロセッサを有するマイクロコンピュータである電子制御/調整デバイス45に接続される。更に制御/調整デバイス45は、距離センサ40の測定値と所定の所望値、たとえば最大値および最小値等とを記憶し得るメモリ要素46に接続される。これに加え、制御/調整デバイス45に対しては4チャネル評価デバイス47および表示デバイス48(ラップおよび/または摩耗メッセージ)が接続される。
【0017】
本発明に係る上記装置を用いると、上側ローラ4のローラ・カバー42に対するピストン・ロッド19の接触圧力により、故にピストン18の位置の決定により、ラップおよび摩耗の両方が表され得る。
【図面の簡単な説明】
【0018】
【図1】本発明に係る装置を有する練篠フレームの牽伸システムの概略的側面図である。
【図2】K−K線(図1)に対応する断面において上側ローラ用空気式加重デバイスと共に図1の一部を示す図である。
【図3】(a)一体的ハウジングと2本の加圧器ロッドとを有する加圧器アームの前面図である。(b)図3(a)に係る加圧器アームの斜視図である。
【図4】ピストンに対してシリンダ基部内に配置された距離センサを示す図である。
【図5】送信器および受信器を備えた上記距離センサを示す図である。
【図6】シリンダ基部に対してピストン内に配置された距離センサを示す図である。
【図7】ピストンに対してシリンダ・カバー内に配置された距離センサを示す図である。
【図8】斜面形状対向要素に対してシリンダ・ハウジング内に配置された距離センサを示す図である。
【図9】距離センサ、メモリ要素、4チャネル評価手段および表示デバイスを有する電子制御/調整デバイス(評価デバイス)の概略的ブロック回路図である。
【符号の説明】
【0019】
1、2、3、4 上側ローラ
4a ジャーナル
5 繊維束
6 ハウジング
6a カバー
7 カバー側開口
8 シリンダ基部
8’ 対向表面
9 空気圧シリンダ
9a1、9a2 加圧要素
10 枢動軸受
11、11a、11b、11c、11d 加圧器アーム
12a 支持要素
13a 保持要素
14 スタンド
15 機械フレーム
16 メンブレン
17 キャビティ
17a、17b 部分
18 ピストン
18’ 円滑表面
18” 対向表面
19 ロッド
20 摺動ブッシュ
22 軸受
22a 軸受
23 圧縮空気接続部
24 通気ボア
25 圧力流体接続部
26 ショルダ
27 保持ブラケット
29 圧縮空気供給源
30 ハウジング
31a 中間要素
32 圧力チャンバ
33 チャネル
33 案内凹所
34 空気圧ライン
35 電気導線
36 着脱可能カバー
37 円筒状延長部
38 ネジ接続部
39 圧縮スプリング
40 距離センサ
40’、40” 光線
40a 光送信器
40b 光受信器
41 環状ショルダ
43 凹所
44 対向要素
45 電子制御/調整デバイス
46 メモリ要素
47 4チャネル評価デバイス
48 表示デバイス
91、92、93、94 加圧器要素
401、402、403 距離センサ
I、II、III 下側ローラ
S 牽伸システム
【特許請求の範囲】
【請求項1】
特に練篠フレーム、カード機、精梳綿機などの紡機の牽伸システムにおいて牽伸システム・ローラを加重するために、圧力媒体により作用されると共にシリンダ・ハウジングの内側で軸心方向移動可能となるべく配置されたピストンであって該ピストンからはピストン・ロッドが延在するというピストンを備えた少なくとも一個の圧力媒体シリンダを有する装置であって、上記ピストン・ロッドは上記シリンダ・ハウジングの端部境界を形成する少なくとも一個のシリンダ・カバーを貫通しており、上記ピストン・ロッドを備えた上記ピストンの位置を決定するセンサ機構が配備されるという装置において、
上記ピストン・ロッド(19;19a、19b)を備えた上記ピストン(18;18a)の位置を決定するために、光学的距離センサ(40;401、402、403)が対向要素の表面(8’;18’;18”;44’)に対する距離(a)を走査し、且つ、該距離センサ(40;401、402、403)は電気的評価デバイス(45)に接続されることを特徴とする、装置。
【請求項2】
前記距離センサは固定位置に在り、且つ、前記対向要素は上記距離センサに対して移動可能であることを特徴とする、請求項1記載の装置。
【請求項3】
前記距離センサは移動可能であり且つ前記対向要素は上記距離センサに対して固定位置に在ることを特徴とする、請求項1または2に記載の装置。
【請求項4】
当該装置はラップの表示のために使用されることを特徴とする、請求項1乃至3のいずれか一項に記載の装置。
【請求項5】
当該装置は前記ローラに対する摩耗を表すために使用されることを特徴とする、請求項1乃至4のいずれか一項に記載の装置。
【請求項6】
前記対向要素は平坦な走査表面を有することを特徴とする、請求項1乃至5のいずれか一項に記載の装置。
【請求項7】
前記走査表面は光線を反射し得ることを特徴とする、請求項1乃至6のいずれか一項に記載の装置。
【請求項8】
前記距離センサは光センサであることを特徴とする、請求項1乃至7のいずれか一項に記載の装置。
【請求項9】
前記距離センサは送信器および受信器を有することを特徴とする、請求項1乃至8のいずれか一項に記載の装置。
【請求項10】
前記距離センサはレーザ・センサであることを特徴とする、請求項1乃至9のいずれか一項に記載の装置。
【請求項11】
前記距離センサは可視光線を使用することを特徴とする、請求項1乃至10のいずれか一項に記載の装置。
【請求項12】
前記距離センサは赤外光を使用することを特徴とする、請求項1乃至11のいずれか一項に記載の装置。
【請求項13】
位置決定のための前記距離センサは前記対向要素の水平な基部表面に対して90°の角度にて取付けられることを特徴とする、請求項1乃至12のいずれか一項に記載の装置。
【請求項14】
前記距離センサおよび前記対向要素は閉じられたハウジング内に配置されることを特徴とする、請求項1乃至13のいずれか一項に記載の装置。
【請求項15】
前記距離センサは電気的評価デバイスに接続されることを特徴とする、請求項1乃至14のいずれか一項に記載の装置。
【請求項16】
前記評価デバイスは電子制御/調整デバイスに接続されることを特徴とする、請求項1乃至15のいずれか一項に記載の装置。
【請求項17】
前記距離センサはアナログ・センサであることを特徴とする、請求項1乃至16のいずれか一項に記載の装置。
【請求項18】
前記対向要素の傾斜表面に対する距離を光学距離センサが走査することを特徴とする、請求項1乃至17のいずれか一項に記載の装置。
【請求項19】
前記牽伸システムは三つの加圧器アームを備えた三個の上側ローラを含むことを特徴とする、請求項1乃至18のいずれか一項に記載の装置。
【請求項20】
前記牽伸システムは四つの加圧器アームそ備えた四個の上側ローラを含むことを特徴とする、請求項1乃至19のいずれか一項に記載の装置。
【請求項21】
前記センサは二方向における前記ピストンの移動を検出し得ることを特徴とする、請求項1乃至20のいずれか一項に記載の装置。
【請求項22】
前記電子制御/調整デバイスは前記ピストンの経路変化を確認できることを特徴とする、請求項1乃至21のいずれか一項に記載の装置。
【請求項23】
ラップの形成により引き起こされる前記上側ローラの偏位に対する最大値は前記制御/調整デバイスに記憶可能であることを特徴とする、請求項1乃至22のいずれか一項に記載の装置。
【請求項24】
障害メッセージが与えられるまでの偏位の値は自由にプログラム可能であることを特徴とする、請求項1乃至23のいずれか一項に記載の装置。
【請求項25】
前記センサは前記牽伸システムが閉じられる毎に較正可能であることを特徴とする、請求項1乃至24のいずれか一項に記載の装置。
【請求項26】
前記電子制御/調整デバイスは4チャネル評価デバイスを備えることを特徴とする、請求項1乃至25のいずれか一項に記載の装置。
【請求項27】
前記上側ローラのラップ形成および/または摩耗挙動に関連する測定値は記憶可能であることを特徴とする、請求項1乃至26のいずれか一項に記載の装置。
【請求項1】
特に練篠フレーム、カード機、精梳綿機などの紡機の牽伸システムにおいて牽伸システム・ローラを加重するために、圧力媒体により作用されると共にシリンダ・ハウジングの内側で軸心方向移動可能となるべく配置されたピストンであって該ピストンからはピストン・ロッドが延在するというピストンを備えた少なくとも一個の圧力媒体シリンダを有する装置であって、上記ピストン・ロッドは上記シリンダ・ハウジングの端部境界を形成する少なくとも一個のシリンダ・カバーを貫通しており、上記ピストン・ロッドを備えた上記ピストンの位置を決定するセンサ機構が配備されるという装置において、
上記ピストン・ロッド(19;19a、19b)を備えた上記ピストン(18;18a)の位置を決定するために、光学的距離センサ(40;401、402、403)が対向要素の表面(8’;18’;18”;44’)に対する距離(a)を走査し、且つ、該距離センサ(40;401、402、403)は電気的評価デバイス(45)に接続されることを特徴とする、装置。
【請求項2】
前記距離センサは固定位置に在り、且つ、前記対向要素は上記距離センサに対して移動可能であることを特徴とする、請求項1記載の装置。
【請求項3】
前記距離センサは移動可能であり且つ前記対向要素は上記距離センサに対して固定位置に在ることを特徴とする、請求項1または2に記載の装置。
【請求項4】
当該装置はラップの表示のために使用されることを特徴とする、請求項1乃至3のいずれか一項に記載の装置。
【請求項5】
当該装置は前記ローラに対する摩耗を表すために使用されることを特徴とする、請求項1乃至4のいずれか一項に記載の装置。
【請求項6】
前記対向要素は平坦な走査表面を有することを特徴とする、請求項1乃至5のいずれか一項に記載の装置。
【請求項7】
前記走査表面は光線を反射し得ることを特徴とする、請求項1乃至6のいずれか一項に記載の装置。
【請求項8】
前記距離センサは光センサであることを特徴とする、請求項1乃至7のいずれか一項に記載の装置。
【請求項9】
前記距離センサは送信器および受信器を有することを特徴とする、請求項1乃至8のいずれか一項に記載の装置。
【請求項10】
前記距離センサはレーザ・センサであることを特徴とする、請求項1乃至9のいずれか一項に記載の装置。
【請求項11】
前記距離センサは可視光線を使用することを特徴とする、請求項1乃至10のいずれか一項に記載の装置。
【請求項12】
前記距離センサは赤外光を使用することを特徴とする、請求項1乃至11のいずれか一項に記載の装置。
【請求項13】
位置決定のための前記距離センサは前記対向要素の水平な基部表面に対して90°の角度にて取付けられることを特徴とする、請求項1乃至12のいずれか一項に記載の装置。
【請求項14】
前記距離センサおよび前記対向要素は閉じられたハウジング内に配置されることを特徴とする、請求項1乃至13のいずれか一項に記載の装置。
【請求項15】
前記距離センサは電気的評価デバイスに接続されることを特徴とする、請求項1乃至14のいずれか一項に記載の装置。
【請求項16】
前記評価デバイスは電子制御/調整デバイスに接続されることを特徴とする、請求項1乃至15のいずれか一項に記載の装置。
【請求項17】
前記距離センサはアナログ・センサであることを特徴とする、請求項1乃至16のいずれか一項に記載の装置。
【請求項18】
前記対向要素の傾斜表面に対する距離を光学距離センサが走査することを特徴とする、請求項1乃至17のいずれか一項に記載の装置。
【請求項19】
前記牽伸システムは三つの加圧器アームを備えた三個の上側ローラを含むことを特徴とする、請求項1乃至18のいずれか一項に記載の装置。
【請求項20】
前記牽伸システムは四つの加圧器アームそ備えた四個の上側ローラを含むことを特徴とする、請求項1乃至19のいずれか一項に記載の装置。
【請求項21】
前記センサは二方向における前記ピストンの移動を検出し得ることを特徴とする、請求項1乃至20のいずれか一項に記載の装置。
【請求項22】
前記電子制御/調整デバイスは前記ピストンの経路変化を確認できることを特徴とする、請求項1乃至21のいずれか一項に記載の装置。
【請求項23】
ラップの形成により引き起こされる前記上側ローラの偏位に対する最大値は前記制御/調整デバイスに記憶可能であることを特徴とする、請求項1乃至22のいずれか一項に記載の装置。
【請求項24】
障害メッセージが与えられるまでの偏位の値は自由にプログラム可能であることを特徴とする、請求項1乃至23のいずれか一項に記載の装置。
【請求項25】
前記センサは前記牽伸システムが閉じられる毎に較正可能であることを特徴とする、請求項1乃至24のいずれか一項に記載の装置。
【請求項26】
前記電子制御/調整デバイスは4チャネル評価デバイスを備えることを特徴とする、請求項1乃至25のいずれか一項に記載の装置。
【請求項27】
前記上側ローラのラップ形成および/または摩耗挙動に関連する測定値は記憶可能であることを特徴とする、請求項1乃至26のいずれか一項に記載の装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2006−307416(P2006−307416A)
【公開日】平成18年11月9日(2006.11.9)
【国際特許分類】
【出願番号】特願2006−124841(P2006−124841)
【出願日】平成18年4月28日(2006.4.28)
【出願人】(590002323)ツリュツラー ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト (85)
【Fターム(参考)】
【公開日】平成18年11月9日(2006.11.9)
【国際特許分類】
【出願日】平成18年4月28日(2006.4.28)
【出願人】(590002323)ツリュツラー ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト (85)
【Fターム(参考)】
[ Back to top ]