
特徴の配置のための位置制御システム
【課題】 作業位置の間を自発的に往来することが可能な作業機械の位置を決定する作業機械に使用するシステムを提供する。
【解決手段】 本体を備える作業機械と、本体に連結されるコンピューティングシステムと、本体から延びる器具であって、作業機械が位置する作業場所の地面を変更するために構成される、器具と、本体に連結されコンピューティングシステムと通信する測位システムであって、コンピューティングシステムが作業機械の位置および作業機械の配向を決定するようにコンピューティングシステムに渡されるデータを提供する、測位システムと、コンピューティングシステムに電気的に連結されてメモリに格納されるソフトウェアと、を含む。
【解決手段】 本体を備える作業機械と、本体に連結されるコンピューティングシステムと、本体から延びる器具であって、作業機械が位置する作業場所の地面を変更するために構成される、器具と、本体に連結されコンピューティングシステムと通信する測位システムであって、コンピューティングシステムが作業機械の位置および作業機械の配向を決定するようにコンピューティングシステムに渡されるデータを提供する、測位システムと、コンピューティングシステムに電気的に連結されてメモリに格納されるソフトウェアと、を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は、概して、地面上および/または地表面の下の位置を特定する手段を有する地面掘削機に関する。本開示は、より具体的には、所望の位置における特徴の配置を可能にする機械の地理学的作業場所を監視するために搭載されたソフトウェアを有する地面掘削機に関する。
【背景技術】
【0002】
柵、木、灌木、および花などの風景の特徴を設置することは、一般的に作業現場での手作業および大幅な準備を含む。柵の設置は、柵全体がまっすぐな柵の並びになるように正確な位置に配置された複数の支柱を必要とする。ゴルフコースなどの特定の造園の設置では、全体的な効果を達成するために特定の位置に植物を配置する。
【発明の概要】
【発明が解決しようとする課題】
【0003】
必要とされるまっすぐな柵の並びを達成するために、柵の設置は、柵の角の位置を決定すること、作業場所に杭を打ち込むこと、および一定の直線を決定するために水糸を張ること、および角以外の支柱の位置を決定することをさらに必要とする。張られた水糸は、一定の基準点および直線を確保するために柵の建築の間、そのままにしておく。従って、張られた水糸は、使用者および機械にとって障害物となる。支柱の穴を掘るため、または支柱を打ち込むための機械は、線の直線度の完全性を壊したり損なわせたりせずに、各支柱の位置に接近する必要がある。従って、使用時に、柵を建造するには、一方から張られた水糸に接近し、支柱を配置し、張られた水糸から逆に離れて、次の支柱の位置に移動して、再び張られた水糸に接近するために使用される何らかの機械を必要とする。
【課題を解決するための手段】
【0004】
第1実施形態によれば、本開示は、本体を備える作業機械と、本体に連結されるコンピューティングシステムと、本体から延びる器具であって、作業機械が位置する作業場所の地面を変更するために構成される、器具と、本体に連結されコンピューティングシステムと通信する測位システムであって、コンピューティングシステムが作業機械の位置および作業機械の配向を決定するようにコンピューティングシステムに渡されるデータを提供する、測位システムと、コンピューティングシステムに電気的に連結されてメモリに格納されるソフトウェアと、を含む。ソフトウェアは、コンピューティングシステムによって解釈されると、作業機械が第1位置に配置されているという指標を受信するステップと、地面の変更が所望される第2位置の指標を受信するステップと、第1位置から第2位置までの経路を決定するステップと、器具が第2位置で地面を変更するために位置するように機械の動作を引き起こすコマンドを発行するステップと、を実行する命令を含む。
【0005】
本開示の別の実施形態によれば、作業機械器具の監視のためのコンピュータ実行システムが提供される。システムは、作業場所の地図を読み出す第1処理シーケンスと、作業機械に連結された全地球測位システム装置からのデータを受信する第2処理シーケンスと、作業機械の位置および配向を決定するために全地球測位装置からのデータを使用する第3処理シーケンスと、作業機械に取り付けられる器具に関するデータを読み出す第4処理シーケンスと、器具の位置を決定する第5処理シーケンスと、第1要求支柱位置の同定を受信する第6処理シーケンスと、機械が第2要求支柱位置に移動されているという指標を受信する第7処理シーケンスと、第1の所望される支柱位置から第2の所望される支柱位置へとる経路についての地表形状情報を記録する第8処理シーケンスと、第2要求支柱位置の同定を受信する第9処理シーケンスと、第3要求支柱位置を自動的に計算する第10処理シーケンスであって、計算は、第1の所望される支柱位置、第2の所望される支柱位置、および地表形状情報を活用する、第10処理シーケンスと、を含む。
【0006】
本開示の別の実施形態によれば、作業機械器具の監視のためのコンピュータ実行システムが提供される。システムは、作業場所の地図を読み取る第1処理シーケンスであって、地図は、所望の器具の使用の少なくとも一つの位置の指標を有する、第1処理シーケンスと、作業機械に連結された全地球測位システム装置からのデータを受信する第2処理シーケンスと、作業機械の位置および配向を決定するために全地球測位装置からのデータを使用する第3処理シーケンスと、作業機械に取り付けられる器具に関するデータを読み出す第4処理シーケンスと、器具の位置を決定する第5処理シーケンスと、地図、作業機械の描画、および所望の器具の使用のうちの少なくとも一つの位置を表示するためにディスプレイにデータを出力する第6処理シーケンスと、所望の器具の使用の少なくとも一つの位置のうちの第1の所望の器具の使用の位置を選択する入力を受信する第6処理シーケンスと、作業機械の位置から第1の所望の器具の使用の位置までのルートを計算する第7処理シーケンスと、第1の所望の器具の使用の位置に前進することの許可を受信する第8処理シーケンスと、機械が計算されたルートに沿って第1の所望の器具の使用の位置に自発的に進むような命令を出力する第9処理シーケンスと、を含む。
【図面の簡単な説明】
【0007】
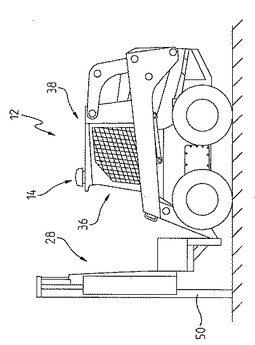
【図1】全地球測位能力を装備したスキッドステア機械を示す図である。
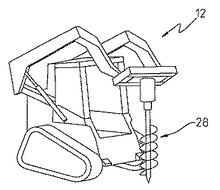
【図1a】全地球測位能力を装備したスキッドステア機械を示す図である。
【図2】柵設置に影響を与えるように操作している図1のスキッドステアのディスプレイを示す図である。
【図3】図1のスキッドステアの搭載コンピュータ上で実行するデータ構造の相互作用を示す図である。
【図4】造園設置を支援するように操作している図2のディスプレイを示す図である。
【発明を実施するための形態】
【0008】
本開示は、掘削機械12に有用性を見出す概念を提供する。本開示は、スキッドステア機械12の使用を説明する。しかしながら、本概念は、追跡掘削機、ホイールベースの掘削機、トラクターベースのバックホー、および任意の他の土壌移動タイプの機械に適用されることが想定される。スキッドステア機械12、または地面および地表面の下を調整および移動するための他の機械の位置は、全地球測位装置(GPS)30によって決定することができる。GPS装置30は、地球同期衛星からの伝送を介してそのアンテナ14の位置を決定する。そのアンテナ14が機械12上に存在する場合、機械の位置が、衛星伝送を介して決定されてもよい。本開示は、掘削機械12が向いている方向が機械12の配向に沿っても決定することができるように、複数のGPSアンテナ14を有する掘削機械12を意図する。アンテナ14は、実例として機械12の運転室38の上部前方の角に位置する。GPS器具は、高められた精度を提供するためのリアルタイムキネマティックGPS補償システムへの接続を提供するために携帯電話などの装置にさらに連結される。
【0009】
地理的作業場所に関する情報は、手作業によって、あるいはGPSによって、または他の方法によって取得される計測を介して作成され、その後コンピュータ計画プログラムを介して増強される作業場所の図面またはファイルから得ることができる。そのような増強は、新しい柵、植物、およびその他の特徴の所望の配置に関する情報を含む。そのような図面は、任意の数の一般的なCADフォーマットを含む既知のフォーマットに応じてフォーマットされる。また、そのような物理的作業場所情報は、公共施設の配管などの表面下の特徴の配置に関する情報も含んでもよい。そのような公共施設情報は、作業場所で特徴を位置付ける工程中に考慮することができる。そのような考慮は、発明者James Leonard Montgomeryによる「Buried Utility Data with Exclusion Zones」という名称の同時出願特許出願により完全に記載されている。前述の出願が立入禁止の地下領域への進入を阻止することをより多く取り扱う一方、本開示は、新しい特徴の配置を決定する際に、地下の特徴に関するデータが考慮される実施形態を含む。
【0010】
掘削機械12は、作業場所データを入力する手段、作業場所データを格納する手段、作業場所データを表示する手段、および作業場所データと相互作用する手段とを含む。
【0011】
作業場所データを入力する手段は、作業場所データが掘削機械12の搭載コンピュータに提供されるようにすることを可能にする任意の通信装置を含む。本例では、作業場所データファイルをその中に有するフラッシュドライブを受け入れることができるUSBポート20が入力手段として提供される。あるいは、入力手段は、ユーザが作業場所データを打ち込むことを可能にする単なるキーボードである。さらに別の代替案において、入力手段は、データをダウンロードする、または他の方法で受信する能力を有する無線リンクである。
【0012】
掘削機械12は、その後、不揮発性メモリ24などにデータを格納し、機械12のディスプレイ34上にデータの表示を提供する。ディスプレイ34は、単純なフラットスクリーンディスプレイタブレットとして提供される。しかしながら、ディスプレイ34が、画像が運転室38の窓36上に投影または他の方法で表示されるヘッドアップ式ディスプレイである実施形態も想定される。搭載コンピュータのプログラミングは、作業場所の地図を近似する視覚表示を提供するために受信され格納されたデータを解釈することができるソフトウェアを含む。そのような地図は、受信した作業場所データによって表示される様々な計画された特徴の位置を含む。ユーザが実在のトポロジーと地図位置をより容易に関連づけることができるように作業場所データを組み合わせるために、Google Mapsまたは他の方法で取得されるものなどのような、航空/衛星地図を許容する選択肢が提供される。
【0013】
相互作用するための手段は、掘削機械12の位置に関する情報を受信し、受信および格納された作業場所データと組み合わせることを含む。一実施形態において、そのような相互作用は、ディスプレイ34上の地図上の掘削機械12の位置を示す形式を取る。さらに、支柱ドライバーおよびらせん状の刃などの器具の位置は、ディスプレイ34上に表示される。後述のように、そのような相互作用は、機械12および器具の配置が計画された特徴の所望の配置と合致することを示すことを含む。
【0014】
前述のように、機械12上のGPSアンテナ14の位置は、掘削機械12に搭載されるソフトウェアのプログラマーにとって既知であるか、またはユーザによって入力される。同様に、機械12の他の部分へのアンテナ14の相対的なオフセットも、あらかじめ設定されるか、またはユーザにより入力されるかのいずれかによってソフトウェアにとって既知である。オフセットは、GPSアンテナまたは機械12上の他の位置に関係して決定される地理的特徴または機械部品の距離、方向、配向、および深さ(または高さ)である。オフセットが機械12上のGPSが決定した位置と組み合わされる場合、特徴または機械部品の位置は、3座標で特定することができる。らせん状の刃(図1a)または支柱ドライバー(図1)が機械12に取り付けられているときは常に、器具28が地面と相互作用する点のオフセットが既知である。従って、そのような器具28も、その後リアルタイムでディスプレイ34上に表示される。
【0015】
掘削機械12が異なる器具28、またはそれぞれが異なるサイズと形状を有し、それゆえそれに関連して異なるオフセットを生成する他の器具を搭載することも理解される。従って、器具28の識別情報も搭載コンピュータに提供される。また、器具28の生の計測データをコンピュータに提供することができる一方で、コンピュータは、様々な一般的な器具28に対してオフセットデータを提供するあらかじめ記憶された形状ファイルを有していてもよい。異なる器具28は、ユーザ登録を介して、または取り付け点の近くに位置する(およびコンピュータと通信する)RFIDリーダおよび器具28に位置するRFIDタグなどの自動化手段を介してコンピュータに識別することができる。
【0016】
機械12の作業環境は不均一な地形を含んでもよい。機械12の本体は、掘削機のピッチおよびロールが水平および垂直からそれるように配向していることがある。ピッチおよびロール計測は、機械12のピッチおよびロールに関するコンピュータにデータを提供する機械運転室38上(または機械12のフレームのほかの位置)に取り付けられたアンテナ14の位置の差を指摘することによって決定される。しかしながら、様々な傾斜計および他のセンサも、この情報を提供することができる。機械12の無限軌道または車輪上で作用するピッチおよびロールは、器具28に変換される。スキッドステア機械12は、ピッチおよびロールにおいて約±30°の移動の調整を提供する。
【0017】
上記の全ては、器具28を含むがこれに限定されない、掘削機械12の位置についての情報を提供するのに役立つ。この情報は、掘削機械12が位置する作業場所のリアルタイムの相互作用的な描画を提供するためにコンピュータのマッピング情報と結合される。そのようなマッピング情報は、所望の特徴の位置を含む、作業場所の様々な特徴について、および作業場所の特徴および所望の特徴に対する掘削機械12の部品の相対位置について、ユーザに通知する。そのようなマッピング情報は、作業場所における機械12の相対的な間隔および作業場所の特徴および作業場所の所望の特徴の視覚的な状況によるレンダリングを提供する。
【0018】
図2は、柵設置モードにおけるディスプレイ34を表す。機械12は、現在の位置およびその配向を示すために地図上に描かれる。所望の柵に対する支柱50の位置は、コンピュータに予め配置されて提供されるか、または位置を計算することができる。位置が予め配置されている実施形態では、機械12は、ディスプレイ34を視認することにより決定されるように、支柱ドライバー28が第1支柱位置の上方に適切に位置するように操作される。支柱は、その後、その位置に打ち込まれる。そのような工程が、連続する柵の支柱位置の各々について繰り返される。
【0019】
支柱位置が事前に決定されていない実施形態では、機械12は、その適切な配置を決定するソフトウェアを含む。そのようなソフトウェアを使用するために、支柱ドライバー28は、第1の角の位置60に配置される。ユーザは、柵の角60が現在の位置に所望されることを示すためにディスプレイ34上のボタンを軽くたたく。ユーザは、地形の記録を可能にするためにディスプレイ34上のボタンをさらに軽くたたく。その後、機械12は、柵のおおよその経路に沿って第2の角の位置70に移動する。地形記録が有効になっている状態で、おおよその経路に沿って移動する一方で、搭載コンピュータは、表面形状に関するデータ(高度、ピッチ、およびロールの変更)を提供される。支柱ドライバー28が第2の角の位置70に達すると、ユーザは、柵の角70が現在の位置に所望されることを示すためにディスプレイ34上のボタンを軽くたたく。両方の角の位置60、70が既知となり、柵経路に沿った表面形状が既知となると、コンピュータは、間の支柱80の配置を自動的に計算する。間の支柱80も、その後、ディスプレイ34上に表示される。間の支柱80の配置のための計算は、所望の支柱間隔、所望の数の支柱、表面形状データ、および既知の地下の特徴(公共施設の配管)を考慮に入れる。同様に、位置60および70は、それらが支柱に対して適切な位置に確実にあることを確実にするために点検する。
【0020】
支柱位置がマッピングされると、支柱の配置を開始することができる。位置60から位置70まで移動される間、機械12の後部は、位置60に向いていることが理解されるべきである。まず、支柱は、位置70で装填されて地中に打ち込まれる。適切に打ち込まれると、支柱が放される。前述したように、機械12が所望の柵の並び位置を往来しながら、表面形状が記録される。機械12が支柱を配置するための位置に到達すると、機械12は、専用のセンサを介して、またはGPS30を介して、ピッチおよびロールを決定する。機械12は、その後、支柱が垂直に打ち込まれることを保証するために支柱ドライバー28の位置を補償する。
【0021】
支柱が位置70で垂直に打ち込まれて放されると、機械12は、次の支柱位置に到達するまで単に後退することができる。従って、機械12は、複数方向に移動しなければならないのとは対照的に、単に逆に進むことによって、一つの支柱の位置から次の支柱の位置まで前進することができる。その後、垂直を保証するために補償し、支柱を実際に打ち込む工程が、繰り返される。この工程は、支柱が位置60に配置されるまで繰り返される。
【0022】
この時点までの説明では、ドライバーが運転室38に居て、支柱位置の間で機械12を移動させることが想定されていたが、機械12が遠隔操作を介して操作する実施形態が想定されるということが理解されるべきである。そのような実施形態は、遠隔操作受信機を有する機械12を含むことになる。一つのそのような受信機は、Cattron社RF Pendant RF/CAN bridgeである。受信機は、遠隔コンピュータと受信機との間の双方向通信を提供する。受信機は、遠隔コンピュータから12の異なる入力を受信する能力を有し、2つの状態スイッチを含む。特定の受信機/遠隔コンピュータが開示されているが、任意の適切な受信機/遠隔コンピュータを、使用することができる。
【0023】
そのような実施形態において、ユーザは、おそらく、(運転室38内からまたは遠隔操作によって)位置60および70に機械12を移動させることになる。ユーザは、運転室38内から運転する場合、その後、機械12から出て、位置60で支柱ドライバー28に支柱を供給する。ユーザは、その後、遠隔操作のボタンを押して、支柱の打ち込みを指示するボタンを受けて支柱ドライバー28の垂直性を達成するための何等かの調整を開始する。あるいは、支柱を打ち込むコマンドが、支柱ドライバー28を自動的に高さ調整する。
【0024】
ユーザは、その後、次の支柱位置に前進するように機械12に指示するためのボタンを押す。次の支柱位置に達すると、ユーザ12は、支柱ドライバー12に支柱を再び供給し、高さ調整および支柱打ち込みシーケンスを再び開始する。従って、支柱は、杭を打ち込むこと、水糸を張ること、または移動の妨げ、およびそれに伴う時間の必要なく、まっすぐに打ち込まれる。上記工程が従来の柵の設置に関するステップを排除していることが理解されるべきである。上記工程は、さらに、一人の人が全てのステップを実行することができることにより、より少ない人員しか必要としない。支柱位置の間で直接移動できることにより、燃料を節約できる。半自動システムは、さらに時間を節約する。支柱が配置されると、柵の接続部分を(ワイヤ、木材、または別の方法で)追加することができる。支柱の計算された配置は、従って、人間が水糸を張り、または物理的に計測して地面に印を付ける必要なしにまっすぐな柵の並びをもたらす。
【0025】
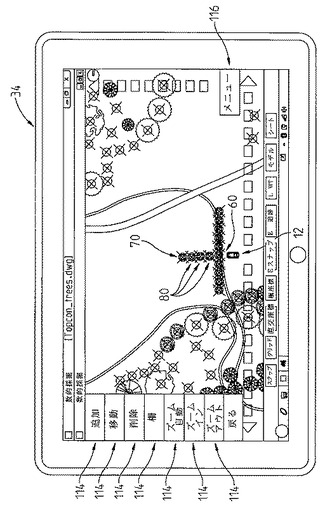
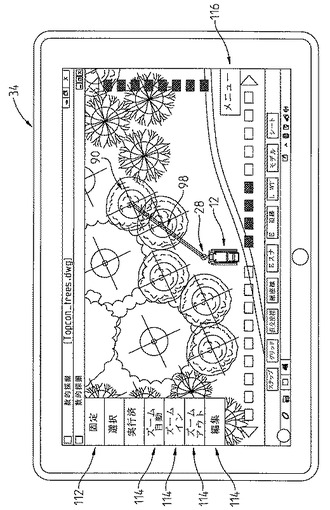
図4は、植樹モードにおけるディスプレイ34を示す。掘る位置が現場で、またはその場で決定される上記の実施形態に加えて、掘る場所が事前に決定される実施形態も存在する。機械12の使用が、植樹するための事前決定された掘る地点の使用に関して以下に記載されるが、そのような実施形態は、柵支柱位置が地図ファイルを介して、または別の方法で予め決定されて提供される柵の設置にも使用可能である。
【0026】
機械12は、その現在の位置および配向を示す地図上に描かれる。所望の木90の位置は、事前に決定されてコンピュータに提供されるか、またはディスプレイ34を介して配置することができるかのいずれかである。植樹モードにおいて、機械12の器具28は、らせん状の刃である。操作時に、ユーザは、その位置の上で軽くたたくことによって、植樹する所望の木を指定することができる。コンピュータは、その後、機械12がらせん状の刃28を適切な位置に移動させるのに必要な移動を計算する。移動は、直行路98としてディスプレイ34上に表示される。その後、ユーザは、位置95に移動を開始する。そのような移動は、ユーザが制御することができ、または自動化することができる。移動が自動で行われる場合、機械12は、直行路98に沿って位置95に移動される。提供される実施形態において、ユーザは、機械12の移動速度を制御するためジョイスティックにより相互作用するが、方向はコンピュータによって制御される。移動が完全にユーザの制御による実施形態において、方向は、ステアリング合図を介してユーザに指示するようにディスプレイ34上に提供される。到達すると、その後のユーザによる操作か、または自動的にらせん状の刃28が始動される。穴が掘られると、ユーザは、次の穴を選択する。さらに、次の一番近い所望の穴が自動的に選択される実施形態が想定される。また、作業機械12は、らせん状の刃28が特定の位置で使用されたことを検出して記録することができる。また、位置の表示は、らせん状の刃28がその位置で使用されたことを特定するように変更することができる。このデータを使用することで、次に最も近い穴位置の選択が、未だ掘られていない穴を開ける位置に限定される。
【0027】
ディスプレイ34は、例示的にはタッチスクリーンである。従って、スクリーンは、複数のコマンド/入力/情報ボタンを提供する。そのようなボタンは、設定に関する情報を提供する情報ボタン112を含む(図4参照。システムが穴位置に固定される表示のボタン112)。情報ボタン112の例は、全体の作業現場が示されるかそれとも作業場所が示されるかを示すものである(作業場所が「作業現場」に対してより小さいまたは機械12についてより局所的である)。コマンドボタン114は、「ズームイン」、「ズーム自動」、「編集」、「追加」、「移動」、「削除」、および「柵」を含む。ズームボタンは、作業現場の図が所望されるようにズームインまたはズームアウトされることを可能にする。コマンドボタン114は、また、「メニュー」ボタン116を選択することによってアクセスされるファイルの読み込み、保存、取り込み、および取り出しに関する様々な機能も含む。「メニュー」ボタン116は、また、様々な設定へのアクセスも提供する。一つのそのような設定は、支柱が打ち込まれる長さの支持を提供することを可能にする。「追加」ボタンは、支柱位置または木の位置の追加を可能にする。「移動」は、提案された特徴を移動することを可能にする。「削除」は、提案された特徴を削除することを可能にする。「柵」ボタンは、間の支柱80を含む柵が計算され表示されるべきことを示す。
【0028】
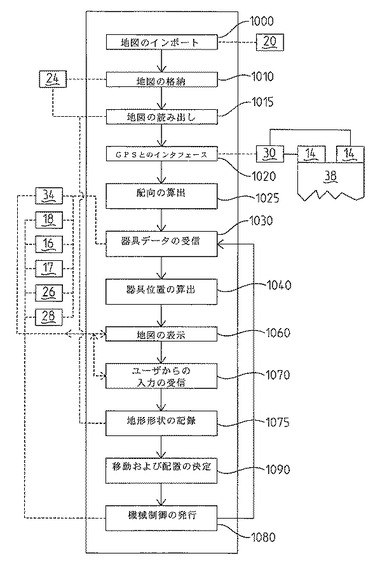
従って、機械12に搭載されるコンピュータ上で実行するソフトウェアが、複数のデータ構造を含むことが理解されるべきである。そのようなデータ構造は、地図データをインポートするためのデータ構造1000、地図データを格納するためのデータ構造1010、地図データを読み出すためのデータ構造1015、GPS装置とインタフェースするためのデータ構造1020、機械の配向を計算するためのデータ構造1025、器具の相対位置データを受信するためのデータ構造1030、器具の絶対的な位置データを計算するためのデータ構造1040、地図および測位データを表示するためのデータ構造1060、ユーザ入力を受信するためのデータ構造1070、および機械制御信号を発信するためのデータ構造1080を含む。
【0029】
地図データをインポートするためのデータ構造1000は、地図データを取得するためにUSBポート(または他の同様なインタフェース)とインタフェースする。このデータは、地図データを格納するため1010にデータ構造に渡される。構造1010は、地図データを格納するためにメモリ24とインタフェースする。地図データを読み出すためのデータ構造1015は、あらかじめ格納された地図データを読み出すためにメモリ24とインタフェースする。GPS装置とインタフェースするためのデータ構造1020は、アンテナ14に対するGPS座標を取得するために(複数のアンテナと通信する)GPS装置30と通信する。機械の配向を計算するためのデータ構造1025は、取得されたGPS座標を受け取り、機械12の位置を決め、同様に機械12の配向を決定するために各アンテナ14からのGPSの読みを比較する。機械相対位置データを受信するためのデータ構造1030は、使用される特定の器具に関する任意のユーザ入力データに対してディスプレイ34と(またはその代わりに、RFIDリーダなどの器具の別の測定器と)インタフェースする。この相対位置データは、その後、構造1040に渡される。器具の絶対的位置データを計算するための構造1040は、構造1030から相対位置データを受け取り、器具28が存在する物理的空間を決定するためにそれをGPS測位および構造1025からの配向データと結合させる。機械12および器具28の位置に関するデータは、構造1060に渡される。
【0030】
地図および測位データを表示するための構造1060は、渡されたデータを受け取り、統合されたデータセットをディスプレイ34に提示する。ユーザ入力を受信するための構造1070は、表示された地図を変更するため、および他の方法で(地形の記録(構造1075)を開始するための、柵支柱の角の位置を特定するための、植樹の場所を選択するための、新しい地図の特徴の構築を可能にするものなどのような)他のデータ構造を開始するためにユーザがディスプレイ34と相互作用することを可能にする。構造1070がディスプレイ34と相互作用するものとして記載されているが、遠隔操作が使用される場合、ユーザ入力が遠隔操作からも入力されることを理解するべきである。構造1070は、また、(器具28の移動を含む)機械12の所望の移動に関する入力も受信する。移動コマンドに関する入力は、構造1080に渡される。
【0031】
構造1075は、地形表面形状を記録する。使用される場合、構造1075から集められたデータは、構造1090に渡される。構造1075と同様に、車両の移動および特徴配置を決定するための構造1090は、しばしば、車両12の特定の実施に固有のものである。柵の並びの実施のために、構造1090は、構造1075からデータを受け取り、その後、柵支柱が配置されるべき位置を計算する。このデータは、その後、構造1080に渡される。穴あけ/植樹配置の実施のために、穴選択は、所望の位置への機械12の移動経路を定義する「直行路」が作成されるように構造1075に中継される。再び、そのようなデータは、その後構造1080に渡される。
【0032】
機械制御信号を発行するための構造1080は、渡された移動コマンドを受け取り、車両の移動を開始するためにそれらを使用する。
【0033】
移動コマンドが構造1080から渡される場合、そのような移動は、GPSアンテナ14の位置および器具28の位置に影響を及ぼす。器具の絶対的位置を決定するための計算が繰り返される(構造1030、1040)。理解されるように、構造の多くは、ディスプレイ34上の地図が常時書き直され、機械12およびその部品の位置が常時再評価されるように繰り返し方式で実行される。このようにして、作業場所における機械12のリアルタイム描画は、ディスプレイ34上に提示される。
【0034】
本願は、衛星ベースのGPSの使用に基づいて述べられているが、本概念は、局所的測位ステーションおよび他の既知の同様な手段とともにでも使用される可能性がある。同様に、本明細書に記載の活用および利点だけでなく、当業者による改良および適合は、特許請求されるように、本発明の趣旨および範囲から逸脱することなく特定の使用に本発明を適合させてもよい。
【技術分野】
【0001】
本開示は、概して、地面上および/または地表面の下の位置を特定する手段を有する地面掘削機に関する。本開示は、より具体的には、所望の位置における特徴の配置を可能にする機械の地理学的作業場所を監視するために搭載されたソフトウェアを有する地面掘削機に関する。
【背景技術】
【0002】
柵、木、灌木、および花などの風景の特徴を設置することは、一般的に作業現場での手作業および大幅な準備を含む。柵の設置は、柵全体がまっすぐな柵の並びになるように正確な位置に配置された複数の支柱を必要とする。ゴルフコースなどの特定の造園の設置では、全体的な効果を達成するために特定の位置に植物を配置する。
【発明の概要】
【発明が解決しようとする課題】
【0003】
必要とされるまっすぐな柵の並びを達成するために、柵の設置は、柵の角の位置を決定すること、作業場所に杭を打ち込むこと、および一定の直線を決定するために水糸を張ること、および角以外の支柱の位置を決定することをさらに必要とする。張られた水糸は、一定の基準点および直線を確保するために柵の建築の間、そのままにしておく。従って、張られた水糸は、使用者および機械にとって障害物となる。支柱の穴を掘るため、または支柱を打ち込むための機械は、線の直線度の完全性を壊したり損なわせたりせずに、各支柱の位置に接近する必要がある。従って、使用時に、柵を建造するには、一方から張られた水糸に接近し、支柱を配置し、張られた水糸から逆に離れて、次の支柱の位置に移動して、再び張られた水糸に接近するために使用される何らかの機械を必要とする。
【課題を解決するための手段】
【0004】
第1実施形態によれば、本開示は、本体を備える作業機械と、本体に連結されるコンピューティングシステムと、本体から延びる器具であって、作業機械が位置する作業場所の地面を変更するために構成される、器具と、本体に連結されコンピューティングシステムと通信する測位システムであって、コンピューティングシステムが作業機械の位置および作業機械の配向を決定するようにコンピューティングシステムに渡されるデータを提供する、測位システムと、コンピューティングシステムに電気的に連結されてメモリに格納されるソフトウェアと、を含む。ソフトウェアは、コンピューティングシステムによって解釈されると、作業機械が第1位置に配置されているという指標を受信するステップと、地面の変更が所望される第2位置の指標を受信するステップと、第1位置から第2位置までの経路を決定するステップと、器具が第2位置で地面を変更するために位置するように機械の動作を引き起こすコマンドを発行するステップと、を実行する命令を含む。
【0005】
本開示の別の実施形態によれば、作業機械器具の監視のためのコンピュータ実行システムが提供される。システムは、作業場所の地図を読み出す第1処理シーケンスと、作業機械に連結された全地球測位システム装置からのデータを受信する第2処理シーケンスと、作業機械の位置および配向を決定するために全地球測位装置からのデータを使用する第3処理シーケンスと、作業機械に取り付けられる器具に関するデータを読み出す第4処理シーケンスと、器具の位置を決定する第5処理シーケンスと、第1要求支柱位置の同定を受信する第6処理シーケンスと、機械が第2要求支柱位置に移動されているという指標を受信する第7処理シーケンスと、第1の所望される支柱位置から第2の所望される支柱位置へとる経路についての地表形状情報を記録する第8処理シーケンスと、第2要求支柱位置の同定を受信する第9処理シーケンスと、第3要求支柱位置を自動的に計算する第10処理シーケンスであって、計算は、第1の所望される支柱位置、第2の所望される支柱位置、および地表形状情報を活用する、第10処理シーケンスと、を含む。
【0006】
本開示の別の実施形態によれば、作業機械器具の監視のためのコンピュータ実行システムが提供される。システムは、作業場所の地図を読み取る第1処理シーケンスであって、地図は、所望の器具の使用の少なくとも一つの位置の指標を有する、第1処理シーケンスと、作業機械に連結された全地球測位システム装置からのデータを受信する第2処理シーケンスと、作業機械の位置および配向を決定するために全地球測位装置からのデータを使用する第3処理シーケンスと、作業機械に取り付けられる器具に関するデータを読み出す第4処理シーケンスと、器具の位置を決定する第5処理シーケンスと、地図、作業機械の描画、および所望の器具の使用のうちの少なくとも一つの位置を表示するためにディスプレイにデータを出力する第6処理シーケンスと、所望の器具の使用の少なくとも一つの位置のうちの第1の所望の器具の使用の位置を選択する入力を受信する第6処理シーケンスと、作業機械の位置から第1の所望の器具の使用の位置までのルートを計算する第7処理シーケンスと、第1の所望の器具の使用の位置に前進することの許可を受信する第8処理シーケンスと、機械が計算されたルートに沿って第1の所望の器具の使用の位置に自発的に進むような命令を出力する第9処理シーケンスと、を含む。
【図面の簡単な説明】
【0007】
【図1】全地球測位能力を装備したスキッドステア機械を示す図である。
【図1a】全地球測位能力を装備したスキッドステア機械を示す図である。
【図2】柵設置に影響を与えるように操作している図1のスキッドステアのディスプレイを示す図である。
【図3】図1のスキッドステアの搭載コンピュータ上で実行するデータ構造の相互作用を示す図である。
【図4】造園設置を支援するように操作している図2のディスプレイを示す図である。
【発明を実施するための形態】
【0008】
本開示は、掘削機械12に有用性を見出す概念を提供する。本開示は、スキッドステア機械12の使用を説明する。しかしながら、本概念は、追跡掘削機、ホイールベースの掘削機、トラクターベースのバックホー、および任意の他の土壌移動タイプの機械に適用されることが想定される。スキッドステア機械12、または地面および地表面の下を調整および移動するための他の機械の位置は、全地球測位装置(GPS)30によって決定することができる。GPS装置30は、地球同期衛星からの伝送を介してそのアンテナ14の位置を決定する。そのアンテナ14が機械12上に存在する場合、機械の位置が、衛星伝送を介して決定されてもよい。本開示は、掘削機械12が向いている方向が機械12の配向に沿っても決定することができるように、複数のGPSアンテナ14を有する掘削機械12を意図する。アンテナ14は、実例として機械12の運転室38の上部前方の角に位置する。GPS器具は、高められた精度を提供するためのリアルタイムキネマティックGPS補償システムへの接続を提供するために携帯電話などの装置にさらに連結される。
【0009】
地理的作業場所に関する情報は、手作業によって、あるいはGPSによって、または他の方法によって取得される計測を介して作成され、その後コンピュータ計画プログラムを介して増強される作業場所の図面またはファイルから得ることができる。そのような増強は、新しい柵、植物、およびその他の特徴の所望の配置に関する情報を含む。そのような図面は、任意の数の一般的なCADフォーマットを含む既知のフォーマットに応じてフォーマットされる。また、そのような物理的作業場所情報は、公共施設の配管などの表面下の特徴の配置に関する情報も含んでもよい。そのような公共施設情報は、作業場所で特徴を位置付ける工程中に考慮することができる。そのような考慮は、発明者James Leonard Montgomeryによる「Buried Utility Data with Exclusion Zones」という名称の同時出願特許出願により完全に記載されている。前述の出願が立入禁止の地下領域への進入を阻止することをより多く取り扱う一方、本開示は、新しい特徴の配置を決定する際に、地下の特徴に関するデータが考慮される実施形態を含む。
【0010】
掘削機械12は、作業場所データを入力する手段、作業場所データを格納する手段、作業場所データを表示する手段、および作業場所データと相互作用する手段とを含む。
【0011】
作業場所データを入力する手段は、作業場所データが掘削機械12の搭載コンピュータに提供されるようにすることを可能にする任意の通信装置を含む。本例では、作業場所データファイルをその中に有するフラッシュドライブを受け入れることができるUSBポート20が入力手段として提供される。あるいは、入力手段は、ユーザが作業場所データを打ち込むことを可能にする単なるキーボードである。さらに別の代替案において、入力手段は、データをダウンロードする、または他の方法で受信する能力を有する無線リンクである。
【0012】
掘削機械12は、その後、不揮発性メモリ24などにデータを格納し、機械12のディスプレイ34上にデータの表示を提供する。ディスプレイ34は、単純なフラットスクリーンディスプレイタブレットとして提供される。しかしながら、ディスプレイ34が、画像が運転室38の窓36上に投影または他の方法で表示されるヘッドアップ式ディスプレイである実施形態も想定される。搭載コンピュータのプログラミングは、作業場所の地図を近似する視覚表示を提供するために受信され格納されたデータを解釈することができるソフトウェアを含む。そのような地図は、受信した作業場所データによって表示される様々な計画された特徴の位置を含む。ユーザが実在のトポロジーと地図位置をより容易に関連づけることができるように作業場所データを組み合わせるために、Google Mapsまたは他の方法で取得されるものなどのような、航空/衛星地図を許容する選択肢が提供される。
【0013】
相互作用するための手段は、掘削機械12の位置に関する情報を受信し、受信および格納された作業場所データと組み合わせることを含む。一実施形態において、そのような相互作用は、ディスプレイ34上の地図上の掘削機械12の位置を示す形式を取る。さらに、支柱ドライバーおよびらせん状の刃などの器具の位置は、ディスプレイ34上に表示される。後述のように、そのような相互作用は、機械12および器具の配置が計画された特徴の所望の配置と合致することを示すことを含む。
【0014】
前述のように、機械12上のGPSアンテナ14の位置は、掘削機械12に搭載されるソフトウェアのプログラマーにとって既知であるか、またはユーザによって入力される。同様に、機械12の他の部分へのアンテナ14の相対的なオフセットも、あらかじめ設定されるか、またはユーザにより入力されるかのいずれかによってソフトウェアにとって既知である。オフセットは、GPSアンテナまたは機械12上の他の位置に関係して決定される地理的特徴または機械部品の距離、方向、配向、および深さ(または高さ)である。オフセットが機械12上のGPSが決定した位置と組み合わされる場合、特徴または機械部品の位置は、3座標で特定することができる。らせん状の刃(図1a)または支柱ドライバー(図1)が機械12に取り付けられているときは常に、器具28が地面と相互作用する点のオフセットが既知である。従って、そのような器具28も、その後リアルタイムでディスプレイ34上に表示される。
【0015】
掘削機械12が異なる器具28、またはそれぞれが異なるサイズと形状を有し、それゆえそれに関連して異なるオフセットを生成する他の器具を搭載することも理解される。従って、器具28の識別情報も搭載コンピュータに提供される。また、器具28の生の計測データをコンピュータに提供することができる一方で、コンピュータは、様々な一般的な器具28に対してオフセットデータを提供するあらかじめ記憶された形状ファイルを有していてもよい。異なる器具28は、ユーザ登録を介して、または取り付け点の近くに位置する(およびコンピュータと通信する)RFIDリーダおよび器具28に位置するRFIDタグなどの自動化手段を介してコンピュータに識別することができる。
【0016】
機械12の作業環境は不均一な地形を含んでもよい。機械12の本体は、掘削機のピッチおよびロールが水平および垂直からそれるように配向していることがある。ピッチおよびロール計測は、機械12のピッチおよびロールに関するコンピュータにデータを提供する機械運転室38上(または機械12のフレームのほかの位置)に取り付けられたアンテナ14の位置の差を指摘することによって決定される。しかしながら、様々な傾斜計および他のセンサも、この情報を提供することができる。機械12の無限軌道または車輪上で作用するピッチおよびロールは、器具28に変換される。スキッドステア機械12は、ピッチおよびロールにおいて約±30°の移動の調整を提供する。
【0017】
上記の全ては、器具28を含むがこれに限定されない、掘削機械12の位置についての情報を提供するのに役立つ。この情報は、掘削機械12が位置する作業場所のリアルタイムの相互作用的な描画を提供するためにコンピュータのマッピング情報と結合される。そのようなマッピング情報は、所望の特徴の位置を含む、作業場所の様々な特徴について、および作業場所の特徴および所望の特徴に対する掘削機械12の部品の相対位置について、ユーザに通知する。そのようなマッピング情報は、作業場所における機械12の相対的な間隔および作業場所の特徴および作業場所の所望の特徴の視覚的な状況によるレンダリングを提供する。
【0018】
図2は、柵設置モードにおけるディスプレイ34を表す。機械12は、現在の位置およびその配向を示すために地図上に描かれる。所望の柵に対する支柱50の位置は、コンピュータに予め配置されて提供されるか、または位置を計算することができる。位置が予め配置されている実施形態では、機械12は、ディスプレイ34を視認することにより決定されるように、支柱ドライバー28が第1支柱位置の上方に適切に位置するように操作される。支柱は、その後、その位置に打ち込まれる。そのような工程が、連続する柵の支柱位置の各々について繰り返される。
【0019】
支柱位置が事前に決定されていない実施形態では、機械12は、その適切な配置を決定するソフトウェアを含む。そのようなソフトウェアを使用するために、支柱ドライバー28は、第1の角の位置60に配置される。ユーザは、柵の角60が現在の位置に所望されることを示すためにディスプレイ34上のボタンを軽くたたく。ユーザは、地形の記録を可能にするためにディスプレイ34上のボタンをさらに軽くたたく。その後、機械12は、柵のおおよその経路に沿って第2の角の位置70に移動する。地形記録が有効になっている状態で、おおよその経路に沿って移動する一方で、搭載コンピュータは、表面形状に関するデータ(高度、ピッチ、およびロールの変更)を提供される。支柱ドライバー28が第2の角の位置70に達すると、ユーザは、柵の角70が現在の位置に所望されることを示すためにディスプレイ34上のボタンを軽くたたく。両方の角の位置60、70が既知となり、柵経路に沿った表面形状が既知となると、コンピュータは、間の支柱80の配置を自動的に計算する。間の支柱80も、その後、ディスプレイ34上に表示される。間の支柱80の配置のための計算は、所望の支柱間隔、所望の数の支柱、表面形状データ、および既知の地下の特徴(公共施設の配管)を考慮に入れる。同様に、位置60および70は、それらが支柱に対して適切な位置に確実にあることを確実にするために点検する。
【0020】
支柱位置がマッピングされると、支柱の配置を開始することができる。位置60から位置70まで移動される間、機械12の後部は、位置60に向いていることが理解されるべきである。まず、支柱は、位置70で装填されて地中に打ち込まれる。適切に打ち込まれると、支柱が放される。前述したように、機械12が所望の柵の並び位置を往来しながら、表面形状が記録される。機械12が支柱を配置するための位置に到達すると、機械12は、専用のセンサを介して、またはGPS30を介して、ピッチおよびロールを決定する。機械12は、その後、支柱が垂直に打ち込まれることを保証するために支柱ドライバー28の位置を補償する。
【0021】
支柱が位置70で垂直に打ち込まれて放されると、機械12は、次の支柱位置に到達するまで単に後退することができる。従って、機械12は、複数方向に移動しなければならないのとは対照的に、単に逆に進むことによって、一つの支柱の位置から次の支柱の位置まで前進することができる。その後、垂直を保証するために補償し、支柱を実際に打ち込む工程が、繰り返される。この工程は、支柱が位置60に配置されるまで繰り返される。
【0022】
この時点までの説明では、ドライバーが運転室38に居て、支柱位置の間で機械12を移動させることが想定されていたが、機械12が遠隔操作を介して操作する実施形態が想定されるということが理解されるべきである。そのような実施形態は、遠隔操作受信機を有する機械12を含むことになる。一つのそのような受信機は、Cattron社RF Pendant RF/CAN bridgeである。受信機は、遠隔コンピュータと受信機との間の双方向通信を提供する。受信機は、遠隔コンピュータから12の異なる入力を受信する能力を有し、2つの状態スイッチを含む。特定の受信機/遠隔コンピュータが開示されているが、任意の適切な受信機/遠隔コンピュータを、使用することができる。
【0023】
そのような実施形態において、ユーザは、おそらく、(運転室38内からまたは遠隔操作によって)位置60および70に機械12を移動させることになる。ユーザは、運転室38内から運転する場合、その後、機械12から出て、位置60で支柱ドライバー28に支柱を供給する。ユーザは、その後、遠隔操作のボタンを押して、支柱の打ち込みを指示するボタンを受けて支柱ドライバー28の垂直性を達成するための何等かの調整を開始する。あるいは、支柱を打ち込むコマンドが、支柱ドライバー28を自動的に高さ調整する。
【0024】
ユーザは、その後、次の支柱位置に前進するように機械12に指示するためのボタンを押す。次の支柱位置に達すると、ユーザ12は、支柱ドライバー12に支柱を再び供給し、高さ調整および支柱打ち込みシーケンスを再び開始する。従って、支柱は、杭を打ち込むこと、水糸を張ること、または移動の妨げ、およびそれに伴う時間の必要なく、まっすぐに打ち込まれる。上記工程が従来の柵の設置に関するステップを排除していることが理解されるべきである。上記工程は、さらに、一人の人が全てのステップを実行することができることにより、より少ない人員しか必要としない。支柱位置の間で直接移動できることにより、燃料を節約できる。半自動システムは、さらに時間を節約する。支柱が配置されると、柵の接続部分を(ワイヤ、木材、または別の方法で)追加することができる。支柱の計算された配置は、従って、人間が水糸を張り、または物理的に計測して地面に印を付ける必要なしにまっすぐな柵の並びをもたらす。
【0025】
図4は、植樹モードにおけるディスプレイ34を示す。掘る位置が現場で、またはその場で決定される上記の実施形態に加えて、掘る場所が事前に決定される実施形態も存在する。機械12の使用が、植樹するための事前決定された掘る地点の使用に関して以下に記載されるが、そのような実施形態は、柵支柱位置が地図ファイルを介して、または別の方法で予め決定されて提供される柵の設置にも使用可能である。
【0026】
機械12は、その現在の位置および配向を示す地図上に描かれる。所望の木90の位置は、事前に決定されてコンピュータに提供されるか、またはディスプレイ34を介して配置することができるかのいずれかである。植樹モードにおいて、機械12の器具28は、らせん状の刃である。操作時に、ユーザは、その位置の上で軽くたたくことによって、植樹する所望の木を指定することができる。コンピュータは、その後、機械12がらせん状の刃28を適切な位置に移動させるのに必要な移動を計算する。移動は、直行路98としてディスプレイ34上に表示される。その後、ユーザは、位置95に移動を開始する。そのような移動は、ユーザが制御することができ、または自動化することができる。移動が自動で行われる場合、機械12は、直行路98に沿って位置95に移動される。提供される実施形態において、ユーザは、機械12の移動速度を制御するためジョイスティックにより相互作用するが、方向はコンピュータによって制御される。移動が完全にユーザの制御による実施形態において、方向は、ステアリング合図を介してユーザに指示するようにディスプレイ34上に提供される。到達すると、その後のユーザによる操作か、または自動的にらせん状の刃28が始動される。穴が掘られると、ユーザは、次の穴を選択する。さらに、次の一番近い所望の穴が自動的に選択される実施形態が想定される。また、作業機械12は、らせん状の刃28が特定の位置で使用されたことを検出して記録することができる。また、位置の表示は、らせん状の刃28がその位置で使用されたことを特定するように変更することができる。このデータを使用することで、次に最も近い穴位置の選択が、未だ掘られていない穴を開ける位置に限定される。
【0027】
ディスプレイ34は、例示的にはタッチスクリーンである。従って、スクリーンは、複数のコマンド/入力/情報ボタンを提供する。そのようなボタンは、設定に関する情報を提供する情報ボタン112を含む(図4参照。システムが穴位置に固定される表示のボタン112)。情報ボタン112の例は、全体の作業現場が示されるかそれとも作業場所が示されるかを示すものである(作業場所が「作業現場」に対してより小さいまたは機械12についてより局所的である)。コマンドボタン114は、「ズームイン」、「ズーム自動」、「編集」、「追加」、「移動」、「削除」、および「柵」を含む。ズームボタンは、作業現場の図が所望されるようにズームインまたはズームアウトされることを可能にする。コマンドボタン114は、また、「メニュー」ボタン116を選択することによってアクセスされるファイルの読み込み、保存、取り込み、および取り出しに関する様々な機能も含む。「メニュー」ボタン116は、また、様々な設定へのアクセスも提供する。一つのそのような設定は、支柱が打ち込まれる長さの支持を提供することを可能にする。「追加」ボタンは、支柱位置または木の位置の追加を可能にする。「移動」は、提案された特徴を移動することを可能にする。「削除」は、提案された特徴を削除することを可能にする。「柵」ボタンは、間の支柱80を含む柵が計算され表示されるべきことを示す。
【0028】
従って、機械12に搭載されるコンピュータ上で実行するソフトウェアが、複数のデータ構造を含むことが理解されるべきである。そのようなデータ構造は、地図データをインポートするためのデータ構造1000、地図データを格納するためのデータ構造1010、地図データを読み出すためのデータ構造1015、GPS装置とインタフェースするためのデータ構造1020、機械の配向を計算するためのデータ構造1025、器具の相対位置データを受信するためのデータ構造1030、器具の絶対的な位置データを計算するためのデータ構造1040、地図および測位データを表示するためのデータ構造1060、ユーザ入力を受信するためのデータ構造1070、および機械制御信号を発信するためのデータ構造1080を含む。
【0029】
地図データをインポートするためのデータ構造1000は、地図データを取得するためにUSBポート(または他の同様なインタフェース)とインタフェースする。このデータは、地図データを格納するため1010にデータ構造に渡される。構造1010は、地図データを格納するためにメモリ24とインタフェースする。地図データを読み出すためのデータ構造1015は、あらかじめ格納された地図データを読み出すためにメモリ24とインタフェースする。GPS装置とインタフェースするためのデータ構造1020は、アンテナ14に対するGPS座標を取得するために(複数のアンテナと通信する)GPS装置30と通信する。機械の配向を計算するためのデータ構造1025は、取得されたGPS座標を受け取り、機械12の位置を決め、同様に機械12の配向を決定するために各アンテナ14からのGPSの読みを比較する。機械相対位置データを受信するためのデータ構造1030は、使用される特定の器具に関する任意のユーザ入力データに対してディスプレイ34と(またはその代わりに、RFIDリーダなどの器具の別の測定器と)インタフェースする。この相対位置データは、その後、構造1040に渡される。器具の絶対的位置データを計算するための構造1040は、構造1030から相対位置データを受け取り、器具28が存在する物理的空間を決定するためにそれをGPS測位および構造1025からの配向データと結合させる。機械12および器具28の位置に関するデータは、構造1060に渡される。
【0030】
地図および測位データを表示するための構造1060は、渡されたデータを受け取り、統合されたデータセットをディスプレイ34に提示する。ユーザ入力を受信するための構造1070は、表示された地図を変更するため、および他の方法で(地形の記録(構造1075)を開始するための、柵支柱の角の位置を特定するための、植樹の場所を選択するための、新しい地図の特徴の構築を可能にするものなどのような)他のデータ構造を開始するためにユーザがディスプレイ34と相互作用することを可能にする。構造1070がディスプレイ34と相互作用するものとして記載されているが、遠隔操作が使用される場合、ユーザ入力が遠隔操作からも入力されることを理解するべきである。構造1070は、また、(器具28の移動を含む)機械12の所望の移動に関する入力も受信する。移動コマンドに関する入力は、構造1080に渡される。
【0031】
構造1075は、地形表面形状を記録する。使用される場合、構造1075から集められたデータは、構造1090に渡される。構造1075と同様に、車両の移動および特徴配置を決定するための構造1090は、しばしば、車両12の特定の実施に固有のものである。柵の並びの実施のために、構造1090は、構造1075からデータを受け取り、その後、柵支柱が配置されるべき位置を計算する。このデータは、その後、構造1080に渡される。穴あけ/植樹配置の実施のために、穴選択は、所望の位置への機械12の移動経路を定義する「直行路」が作成されるように構造1075に中継される。再び、そのようなデータは、その後構造1080に渡される。
【0032】
機械制御信号を発行するための構造1080は、渡された移動コマンドを受け取り、車両の移動を開始するためにそれらを使用する。
【0033】
移動コマンドが構造1080から渡される場合、そのような移動は、GPSアンテナ14の位置および器具28の位置に影響を及ぼす。器具の絶対的位置を決定するための計算が繰り返される(構造1030、1040)。理解されるように、構造の多くは、ディスプレイ34上の地図が常時書き直され、機械12およびその部品の位置が常時再評価されるように繰り返し方式で実行される。このようにして、作業場所における機械12のリアルタイム描画は、ディスプレイ34上に提示される。
【0034】
本願は、衛星ベースのGPSの使用に基づいて述べられているが、本概念は、局所的測位ステーションおよび他の既知の同様な手段とともにでも使用される可能性がある。同様に、本明細書に記載の活用および利点だけでなく、当業者による改良および適合は、特許請求されるように、本発明の趣旨および範囲から逸脱することなく特定の使用に本発明を適合させてもよい。
【特許請求の範囲】
【請求項1】
作業機械であって、
本体と、
前記本体に連結されたコンピューティングシステムと、
前記本体から延びる器具であって、前記器具は、前記作業機械が位置する作業場所の地面を変更するために構成された、器具と、
前記本体に連結され前記コンピューティングシステムと通信する測位システムであって、前記測位システムは、前記コンピューティングシステムが前記作業機械の位置および前記作業機械の配向を決定することができるように前記コンピューティングシステムに渡されるデータを提供する、測位システムと、
前記コンピューティングシステムに電気的に連結されたメモリに格納されるソフトウェアであって、前記ソフトウェアは、前記コンピューティングシステムによって解釈されると、
前記作業機械が第1位置に存在するという指標を受信するステップ、
前記地面を変更することが所望される第2位置の指標を受信するステップ、
前記第1位置から前記第2位置までの経路を決定するステップ、および
前記器具が前記第2位置で前記地面を変更するように位置付けられるように前記機械の動作を引き起こすコマンドを発行するステップ、
を実行する命令を含む、ソフトウェアと、
を含む作業機械。
【請求項2】
前記ソフトウェアは、前記コンピューティングシステムに前記第1位置と前記第2位置との間の前記経路の表面形状を記録するステップを実行させる命令をさらに含む、請求項1に記載の作業機械。
【請求項3】
前記地面の所望の変更は、らせん状の刃で掘ることを含み、前記第2位置は、らせん状の刃の使用が所望される位置である、請求項1に記載の作業機械。
【請求項4】
前記作業機械の使用者によって見えるディスプレイをさらに含み、前記ディスプレイは、作業場所において前記作業機械の前記作業場所および相対位置の地図を表示する、請求項1に記載の作業機械。
【請求項5】
前記ディスプレイは、前記第2位置で第1の所望の特徴の第1描写を含み、前記ソフトウェアは、前記第1描写が選択された指標を受信し、前記第1位置から前記第2位置までの経路を決定するステップは、前記第1描写が選択された前記指標の受信により自動的に起こる、請求項4に記載の作業機械。
【請求項6】
前記地面の前記所望の変更は、柵支柱の配置を含み、前記ソフトウェアは、
前記第1位置が第1柵支柱位置である指標を受信することと、
前記第2位置が第2柵支柱位置である指標を受信することと、
前記第1支柱位置と前記第2支柱位置との間の経路の表面形状に関する情報を受信することと、
前記第1支柱位置、前記第2支柱位置、および前記表面形状に基づく第3支柱の位置の計算することと、
を前記コンピューティングシステムにさらにさせる、請求項1に記載の作業機械。
【請求項7】
前記表面形状は、前記第2位置から前記第1位置へ前記機械が移動するとともに記録される、請求項6に記載の作業機械。
【請求項8】
前記ソフトウェアは、前記器具が前記第3支柱位置で柵支柱を配置するために位置するように前記第2位置から前記第3支柱位置まで自発的に操作するように前記作業機械に対して命令を発することを前記コンピューティングシステムにさらにさせる、請求項6に記載の作業機械。
【請求項9】
前記第3位置は、支柱が前記第1位置、第2位置、および第3位置が直線を形成する位置に配置されるように計算される、請求項6に記載の作業機械。
【請求項10】
前記コンピューティングシステムによって発せられる前記命令は、前記第2位置と第3位置との間で移動する場合、前記作業機械に前記直線に沿って前進するように命令する、請求項9に記載の作業機械。
【請求項11】
前記ソフトウェアは、隣接する支柱の間の所望の距離を表示する入力の受信であって、前記第3支柱の位置は、前記隣接する支柱の間の所望の距離に基づいて少なくとも部分的に計算される、受信を前記コンピューティングシステムにさらにさせる、請求項6に記載の作業機械。
【請求項12】
作業機械器具の監視のためのコンピュータ実行システムであって、前記システムは、
作業場所の地図を読み出す第1処理シーケンスと、
前記作業機械に連結された全地球測位システム装置からのデータを受信する第2処理シーケンスと、
前記作業機械の位置および配向を決定するために前記全地球測位装置からの前記データを使用する第3処理シーケンスと、
前記作業機械に取り付けられる器具に関するデータを読み出す第4処理シーケンスと、
前記器具の前記位置を決定する第5処理シーケンスと、
第1の所望される支柱位置の同定を受信する第6処理シーケンスと、
前記機械が第2の所望される支柱位置に向かって移動されているという指標を受信する第7処理シーケンスと、
前記第1の所望される支柱位置から前記第2の所望される支柱位置までにとる経路についての地面形状情報を記録する第8処理シーケンスと、
前記第2の所望される支柱位置の同定を受信する第9処理シーケンスと、
第3の所望される支柱位置を自動的に計算する第10処理シーケンスであって、前記計算は、前記第1の所望される支柱位置、前記第2の所望される支柱位置、および前記地面形状情報を活用する、第10処理シーケンスと、
を含むシステム。
【請求項13】
前記地図データ、前記第1の所望される支柱位置、前記第2の所望される支柱位置、および前記第3の所望される支柱位置をディスプレイ上に表示する第11処理シーケンスをさらに含む、請求項12に記載のシステム。
【請求項14】
支柱が前記第2の所望される支柱位置で配置されたという指標を受信する第12処理シーケンスをさらに含む、請求項12に記載のシステム。
【請求項15】
前記機械に前記第2の所望される支柱位置から前記第3の所望される支柱位置まで自発的に前進させる命令を生成する第13処理シーケンスをさらに含む、請求項14に記載のシステム。
【請求項16】
作業機械器具の監視のためのコンピュータ実行システムであって、前記システムは、
作業場所の地図を読み取る第1処理シーケンスであって、前記地図は、所望の器具の使用の少なくとも一つの位置の指標を有する、第1処理シーケンスと、
前記作業機械に連結された全地球測位システム装置からのデータを受信する第2処理シーケンスと、
前記作業機械の位置および配向を決定するために前記全地球測位装置からの前記データを使用する第3処理シーケンスと、
前記作業機械に取り付けられた器具に関するデータを読み出す第4処理シーケンスと、
前記器具の前記位置を決定する第5処理シーケンスと、
前記地図、前記作業機械の描画、および前記所望の器具の使用の少なくとも一つの位置を表示するためにディスプレイにデータを出力する第6処理シーケンスと、
前記所望の器具の使用の少なくとも一つの位置の、所望の器具の使用の第1の位置を選択する入力を受信する第6処理シーケンスと、
前記作業機械の前記位置から前記所望の器具の使用の第1の位置までの経路を計算する第7処理シーケンスと、
前記所望の器具の使用の第1の位置に前進することの許可を受信する第8処理シーケンスと、
前記機械が前記計算された経路に沿って前記所望の器具の使用の第1の位置に自発的に進むような命令を出力する第9処理シーケンスと、
を含むシステム。
【請求項17】
前記所望の器具の使用の第1の位置を選択する前記入力は、前記ディスプレイに由来する、請求項16に記載のシステム。
【請求項18】
前記器具が前記第1位置で使用されたという指標を受信する第10処理シーケンスをさらに含む、請求項17に記載のシステム。
【請求項19】
前記所望の器具の少なくとも一つの位置の、所望の器具の第2の位置を自動的に選択する第11処理シーケンスをさらに含む、請求項18に記載のシステム。
【請求項20】
前記第11処理シーケンスは、所望の器具の使用の他の位置までの距離を考慮し、かつ所望の器具の使用の位置が既に器具の使用を受けたことを考慮することによって前記第2位置を選択する、請求項19に記載のシステム。
【請求項1】
作業機械であって、
本体と、
前記本体に連結されたコンピューティングシステムと、
前記本体から延びる器具であって、前記器具は、前記作業機械が位置する作業場所の地面を変更するために構成された、器具と、
前記本体に連結され前記コンピューティングシステムと通信する測位システムであって、前記測位システムは、前記コンピューティングシステムが前記作業機械の位置および前記作業機械の配向を決定することができるように前記コンピューティングシステムに渡されるデータを提供する、測位システムと、
前記コンピューティングシステムに電気的に連結されたメモリに格納されるソフトウェアであって、前記ソフトウェアは、前記コンピューティングシステムによって解釈されると、
前記作業機械が第1位置に存在するという指標を受信するステップ、
前記地面を変更することが所望される第2位置の指標を受信するステップ、
前記第1位置から前記第2位置までの経路を決定するステップ、および
前記器具が前記第2位置で前記地面を変更するように位置付けられるように前記機械の動作を引き起こすコマンドを発行するステップ、
を実行する命令を含む、ソフトウェアと、
を含む作業機械。
【請求項2】
前記ソフトウェアは、前記コンピューティングシステムに前記第1位置と前記第2位置との間の前記経路の表面形状を記録するステップを実行させる命令をさらに含む、請求項1に記載の作業機械。
【請求項3】
前記地面の所望の変更は、らせん状の刃で掘ることを含み、前記第2位置は、らせん状の刃の使用が所望される位置である、請求項1に記載の作業機械。
【請求項4】
前記作業機械の使用者によって見えるディスプレイをさらに含み、前記ディスプレイは、作業場所において前記作業機械の前記作業場所および相対位置の地図を表示する、請求項1に記載の作業機械。
【請求項5】
前記ディスプレイは、前記第2位置で第1の所望の特徴の第1描写を含み、前記ソフトウェアは、前記第1描写が選択された指標を受信し、前記第1位置から前記第2位置までの経路を決定するステップは、前記第1描写が選択された前記指標の受信により自動的に起こる、請求項4に記載の作業機械。
【請求項6】
前記地面の前記所望の変更は、柵支柱の配置を含み、前記ソフトウェアは、
前記第1位置が第1柵支柱位置である指標を受信することと、
前記第2位置が第2柵支柱位置である指標を受信することと、
前記第1支柱位置と前記第2支柱位置との間の経路の表面形状に関する情報を受信することと、
前記第1支柱位置、前記第2支柱位置、および前記表面形状に基づく第3支柱の位置の計算することと、
を前記コンピューティングシステムにさらにさせる、請求項1に記載の作業機械。
【請求項7】
前記表面形状は、前記第2位置から前記第1位置へ前記機械が移動するとともに記録される、請求項6に記載の作業機械。
【請求項8】
前記ソフトウェアは、前記器具が前記第3支柱位置で柵支柱を配置するために位置するように前記第2位置から前記第3支柱位置まで自発的に操作するように前記作業機械に対して命令を発することを前記コンピューティングシステムにさらにさせる、請求項6に記載の作業機械。
【請求項9】
前記第3位置は、支柱が前記第1位置、第2位置、および第3位置が直線を形成する位置に配置されるように計算される、請求項6に記載の作業機械。
【請求項10】
前記コンピューティングシステムによって発せられる前記命令は、前記第2位置と第3位置との間で移動する場合、前記作業機械に前記直線に沿って前進するように命令する、請求項9に記載の作業機械。
【請求項11】
前記ソフトウェアは、隣接する支柱の間の所望の距離を表示する入力の受信であって、前記第3支柱の位置は、前記隣接する支柱の間の所望の距離に基づいて少なくとも部分的に計算される、受信を前記コンピューティングシステムにさらにさせる、請求項6に記載の作業機械。
【請求項12】
作業機械器具の監視のためのコンピュータ実行システムであって、前記システムは、
作業場所の地図を読み出す第1処理シーケンスと、
前記作業機械に連結された全地球測位システム装置からのデータを受信する第2処理シーケンスと、
前記作業機械の位置および配向を決定するために前記全地球測位装置からの前記データを使用する第3処理シーケンスと、
前記作業機械に取り付けられる器具に関するデータを読み出す第4処理シーケンスと、
前記器具の前記位置を決定する第5処理シーケンスと、
第1の所望される支柱位置の同定を受信する第6処理シーケンスと、
前記機械が第2の所望される支柱位置に向かって移動されているという指標を受信する第7処理シーケンスと、
前記第1の所望される支柱位置から前記第2の所望される支柱位置までにとる経路についての地面形状情報を記録する第8処理シーケンスと、
前記第2の所望される支柱位置の同定を受信する第9処理シーケンスと、
第3の所望される支柱位置を自動的に計算する第10処理シーケンスであって、前記計算は、前記第1の所望される支柱位置、前記第2の所望される支柱位置、および前記地面形状情報を活用する、第10処理シーケンスと、
を含むシステム。
【請求項13】
前記地図データ、前記第1の所望される支柱位置、前記第2の所望される支柱位置、および前記第3の所望される支柱位置をディスプレイ上に表示する第11処理シーケンスをさらに含む、請求項12に記載のシステム。
【請求項14】
支柱が前記第2の所望される支柱位置で配置されたという指標を受信する第12処理シーケンスをさらに含む、請求項12に記載のシステム。
【請求項15】
前記機械に前記第2の所望される支柱位置から前記第3の所望される支柱位置まで自発的に前進させる命令を生成する第13処理シーケンスをさらに含む、請求項14に記載のシステム。
【請求項16】
作業機械器具の監視のためのコンピュータ実行システムであって、前記システムは、
作業場所の地図を読み取る第1処理シーケンスであって、前記地図は、所望の器具の使用の少なくとも一つの位置の指標を有する、第1処理シーケンスと、
前記作業機械に連結された全地球測位システム装置からのデータを受信する第2処理シーケンスと、
前記作業機械の位置および配向を決定するために前記全地球測位装置からの前記データを使用する第3処理シーケンスと、
前記作業機械に取り付けられた器具に関するデータを読み出す第4処理シーケンスと、
前記器具の前記位置を決定する第5処理シーケンスと、
前記地図、前記作業機械の描画、および前記所望の器具の使用の少なくとも一つの位置を表示するためにディスプレイにデータを出力する第6処理シーケンスと、
前記所望の器具の使用の少なくとも一つの位置の、所望の器具の使用の第1の位置を選択する入力を受信する第6処理シーケンスと、
前記作業機械の前記位置から前記所望の器具の使用の第1の位置までの経路を計算する第7処理シーケンスと、
前記所望の器具の使用の第1の位置に前進することの許可を受信する第8処理シーケンスと、
前記機械が前記計算された経路に沿って前記所望の器具の使用の第1の位置に自発的に進むような命令を出力する第9処理シーケンスと、
を含むシステム。
【請求項17】
前記所望の器具の使用の第1の位置を選択する前記入力は、前記ディスプレイに由来する、請求項16に記載のシステム。
【請求項18】
前記器具が前記第1位置で使用されたという指標を受信する第10処理シーケンスをさらに含む、請求項17に記載のシステム。
【請求項19】
前記所望の器具の少なくとも一つの位置の、所望の器具の第2の位置を自動的に選択する第11処理シーケンスをさらに含む、請求項18に記載のシステム。
【請求項20】
前記第11処理シーケンスは、所望の器具の使用の他の位置までの距離を考慮し、かつ所望の器具の使用の位置が既に器具の使用を受けたことを考慮することによって前記第2位置を選択する、請求項19に記載のシステム。
【図1】


【図1a】
【図2】
【図3】
【図4】
【図1a】
【図2】
【図3】
【図4】
【公開番号】特開2013−47951(P2013−47951A)
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−182505(P2012−182505)
【出願日】平成24年8月21日(2012.8.21)
【出願人】(591005165)ディーア・アンド・カンパニー (109)
【氏名又は名称原語表記】DEERE AND COMPANY
【Fターム(参考)】
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願番号】特願2012−182505(P2012−182505)
【出願日】平成24年8月21日(2012.8.21)
【出願人】(591005165)ディーア・アンド・カンパニー (109)
【氏名又は名称原語表記】DEERE AND COMPANY
【Fターム(参考)】
[ Back to top ]