
特異部分分布特徴検出装置及び特異部分分布特徴検出方法
【課題】製品の表面にある特異部分の分布に関する特徴を検出すること。
【解決手段】特異部分分布特徴検出装置100は、製品の表面を撮影して表面画像を取得する画像取得部2と、その表面画像から複数の特異画素を含む処理対象画像を生成する処理対象画像生成部10と、その処理対象画像上に設定した直交XY座標系における特異画素の座標を取得する特異画素座標取得部11と、それら複数の特異画素の座標のうちの二つの座標のピッチと位相差との組み合わせを反復特性として導き出す反復特性導出部12と、ピッチGと位相差Rとを座標軸とする直交GR座標系を用いて、その組み合わせの直交GR座標系上の一座標への変換を実行し、その変換回数を座標毎に計数して計数結果を出力する座標系変換部13と、その計数結果の解析に基づいて複数の特異画素が形成する反復的特徴を検出する反復的特徴検出部14と、を備える。
【解決手段】特異部分分布特徴検出装置100は、製品の表面を撮影して表面画像を取得する画像取得部2と、その表面画像から複数の特異画素を含む処理対象画像を生成する処理対象画像生成部10と、その処理対象画像上に設定した直交XY座標系における特異画素の座標を取得する特異画素座標取得部11と、それら複数の特異画素の座標のうちの二つの座標のピッチと位相差との組み合わせを反復特性として導き出す反復特性導出部12と、ピッチGと位相差Rとを座標軸とする直交GR座標系を用いて、その組み合わせの直交GR座標系上の一座標への変換を実行し、その変換回数を座標毎に計数して計数結果を出力する座標系変換部13と、その計数結果の解析に基づいて複数の特異画素が形成する反復的特徴を検出する反復的特徴検出部14と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、製品の表面にある特異部分の分布に関する特徴を検出するための特異部分分布特徴検出装置及び特異部分分布特徴検出方法に関し、特に、その製品の表面を表す画像において反復的に現れる特異部分を表す特異画素の分布に関する特徴を検出することでその製品の表面にある特異部分の分布に関する特徴を検出する特異部分分布特徴検出装置及び特異部分分布特徴検出方法に関する。
【背景技術】
【0002】
従来、画像から直線を抽出するためのハフ変換アルゴリズムを利用した技術が知られている(例えば、特許文献1〜4が知られている。)。
【0003】
最初に、ハフ変換アルゴリズムは、直交XY座標系上(原画像上)の一座標(一点)を通る任意の直線に対する原点(X=0、Y=0)から下ろした法線の長さρと角度θとを二つの座標軸とする直交パラメータ座標系を設定する。
【0004】
その後、ハフ変換アルゴリズムは、抽出対象の直線を構成する座標群(点群)を含む直交XY座標系の点群(例えば、その輝度値が閾値以上となる点群である。)のうちの一点を通る(ρ、θで表される)直線群を直交パラメータ座標系における点群のそれぞれに投票する(「投票」は、直交XY座標系における直線を直交パラメータ座標系における座標に変換した場合にその座標に関する変換回数を1だけ計数する処理を意味する。)。
【0005】
その後、ハフ変換アルゴリズムは、それら直交XY座標系上の直線群の全てについてこの投票を繰り返すことによって、抽出対象の直線を構成する点群に関する直交パラメータ座標系上の特定の座標に関する投票数が顕著に増大することを利用して、その抽出対象の直線を抽出する。
【0006】
上述の基本原理に加えて、特許文献1は、最小二乗法を併用して画像内の矩形の2次元コード図形を切り出す方法を開示している。
【0007】
また、特許文献2は、直線をより高精度に抽出するために、その直線を前処理により概略的に検出し、その概略的に検出された直線の長さに基づいて直交パラメータ座標系におけるρ、θのサンプリング間隔Δρ、Δθを決定する方法を開示している。
【0008】
また、特許文献3は、投票回数を低減させるために、抽出しようとする直線(道路境界線)の延在方向に応じて直交パラメータ座標系におけるθの値の範囲を限定し、且つ、抽出しようとする道路境界線と抽出対象でない他の直線との色の違いを利用して、投票の対象となる直交XY座標系上の点群の数を限定する方法を開示している。
【0009】
また、特許文献4は、直交パラメータ座標系における複数の小区間ΔD内の座標群の投票数をまとめた上で直交XY座標系(放射線撮影画像)における直線を大まかに抽出し、その後改めて小区間ΔD内の座標毎の投票数に基づいて放射線撮影画像における直線をより厳密に特定して、放射線撮影画像における矩形の照射野輪郭PSを検出する方法を開示している。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平7−220081号公報
【特許文献2】特開平11−66302号公報
【特許文献3】特開平6−337936号公報
【特許文献4】特開2006−293522号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、特許文献1〜4に記載の方法はいずれも、ρ及びθを二つの座標軸とする直交パラメータ座標系への投票を行うハフ変換アルゴリズムを用いて画像内の直線を抽出するためのものであり、画像内で反復的に現れる特異部分を表す特異画素の分布に関する特徴を抽出することはできない。
【0012】
上述の点に鑑み、本発明は、製品の表面を表す画像において反復的に現れる特異部分を表す特異画素の分布に関する特徴を検出することによってその製品の表面にある特異部分の分布に関する特徴を検出する特異部分分布特徴検出装置及び特異部分分布特徴検出方法を提供することを目的とする。
【課題を解決するための手段】
【0013】
上述の目的を達成するために、本発明の実施例に係る特異部分分布特徴検出装置は、製品の表面にある特異部分の分布に関する特徴を検出する特異部分分布特徴検出装置であって、前記製品の表面を撮影して表面画像を取得する画像取得部と、前記表面画像から製品の表面にある特異部分を表す複数の特異画素を含む処理対象画像を生成する処理対象画像生成部と、前記処理対象画像上に直交XY座標系を設定し、該直交XY座標系における前記特異画素の座標を取得する特異画素座標取得部と、前記複数の特異画素の座標のうちの二つの座標の間隔と所定の基準点から該二つの座標のうちの一つまでの間隔を該二つの座標の間隔で除したときの余りとの組み合わせを反復特性として導き出す反復特性導出部と、 前記間隔と前記余りとを座標軸とする直交パラメータ座標系を用いて、前記反復特性導出部が導き出す組み合わせの、該直交パラメータ座標系上の一座標への変換を実行し、該直交パラメータ座標系上の各座標への変換の回数を該直交パラメータ座標系上の座標毎に計数して計数結果を出力する座標系変換部と、前記座標系変換部による計数結果の解析に基づいて前記複数の特異画素が形成する反復的特徴を検出する反復的特徴検出部と、を備えることを特徴とする。
【0014】
また、前記反復的特徴検出部は、前記直交パラメータ座標系の一座標における計数結果が閾値を超える場合に、該一座標に対応する前記直交XY座標系における前記複数の特異画素が表す反復的特徴を、前記製品の表面にある特異部分が形成する反復的特徴として検出することが好ましい。
【0015】
また、前記座標系変換部は、前記反復特性導出部が導き出す前記間隔と前記余りとの組み合わせを、第一の分解能を有する第一の直交パラメータ座標系上の一座標へ変換して第一の計数結果を出力し、前記反復的特徴検出部は、前記第一の計数結果の解析に基づいて前記複数の特異画素が形成する第一の反復的特徴を検出し、前記座標系変換部は、前記第一の反復的特徴を形成する複数の特異画素の座標のうちの二つの座標の前記間隔と前記余りとの組み合わせを、前記第一の分解能より細かい第二の分解能を有する第二の直交パラメータ座標系上の一座標へ変換して第二の計数結果を出力し、前記反復的特徴検出部は、前記第二の計数結果の解析に基づいて前記第一の反復的特徴を形成する複数の特異画素が形成する第二の反復的特徴を検出することが好ましい。
【0016】
また、本発明の実施例に係る特異部分分布特徴検出方法は、製品の表面にある特異部分の分布に関する特徴を検出する特異部分分布特徴検出方法であって、前記製品の表面を撮影して表面画像を取得する画像取得ステップと、前記表面画像から製品の表面にある特異部分を表す複数の特異画素を含む処理対象画像を生成する処理対象画像生成ステップと、前記処理対象画像上に直交XY座標系を設定し、該直交XY座標系における前記特異画素の座標を取得する特異画素座標取得ステップと、前記複数の特異画素の座標のうちの二つの座標の間隔と所定の基準点から該二つの座標のうちの一つまでの間隔を該二つの座標の間隔で除したときの余りとの組み合わせを反復特性として導き出す反復特性導出ステップと、前記間隔と前記余りとを座標軸とする直交パラメータ座標系を用いて、前記反復特性導出ステップにおいて導き出される組み合わせの、該直交パラメータ座標系上の一座標への変換を実行し、該直交パラメータ座標系上の各座標への変換の回数を該直交パラメータ座標系上の座標毎に計数して計数結果を出力する座標系変換ステップと、前記座標系変換ステップにおける計数結果の解析に基づいて前記複数の特異画素が形成する反復的特徴を検出する反復的特徴検出ステップと、を備えることを特徴とする。
【発明の効果】
【0017】
上述の手段により、本発明は、製品の表面を表す画像において反復的に現れる特異部分を表す特異画素の分布に関する特徴を検出することによってその製品の表面にある特異部分の分布に関する特徴を検出する特異部分分布特徴検出装置及び特異部分分布特徴検出方法を提供することができる。
【図面の簡単な説明】
【0018】
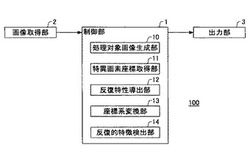
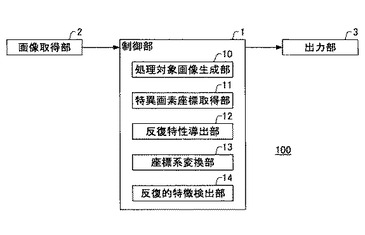
【図1】本発明の実施例に係る特異部分分布特徴検出装置の構成例を示すブロック図である。
【図2】表面画像上の特異画素群と処理対象画像上の中心画素との間の関係を示す図である。
【図3】処理対象画像生成部が生成した処理対象画像の一例を示す図である。
【図4】処理対象画像上に設定された直交XY座標系の一例を示す図である。
【図5】中心画素が形成する反復的特徴の反復特性を説明するための図である。
【図6】中心画素の座標群のうちの二つの座標のピッチと位相差との組み合わせを、直交GR座標系における座標に変換する手順を説明するための図である。
【図7】座標系変換部による計数結果を模式的に示す図(その1)である。
【図8】座標系変換部による計数結果を模式的に示す図(その2)である。
【図9】反復的特徴検出処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0019】
以下、図面を参照しつつ、本発明を実施するための最良の形態の説明を行う。
【0020】
図1は、本発明の実施例に係る特異部分分布特徴検出装置100の構成例を示すブロック図である。
【0021】
特異部分分布特徴検出装置100は、平坦な表面を有する製品のその表面にある特異部分の分布に関する特徴を検出するための装置であり、制御部1、画像取得部2、及び出力部3を有する。
【0022】
平坦な表面を有する製品は、例えば、複数の搬送ローラを利用して製造工程内を搬送される長尺の物である。
【0023】
製品の表面にある特異部分は、製品表面の他の部分と特性(例えば、輝き、粗さ、凹凸等の度合いである。)が異なる部分であり、例えば、搬送ローラにおける傷や付着ゴミによってその製品に周期的或いは連続的に転写される凹み等であり、その特異部分は、製品の搬送方向に平行な線状の分布を形成する。なお、その特異部分が形成する線は、通常、直線状の分布を形成するが、搬送ローラによる製品搬送中にその製品が搬送ローラ上を製品幅方向に左右に揺動することに起因して、左右に揺動する曲線又はジグザグ線となる場合もある。
【0024】
また、製品の表面にある特異部分は、上述のように意に反して形成されたものばかりでなく、意図的に形成される模様を構成するものであってもよい。
【0025】
制御部1は、CPU(Central Processing Unit)、RAM(Random Access Memory)、ROM(Read Only Memory)等を備えたコンピュータであって、例えば、処理対象画像生成部10、特異画素座標取得部11、反復特性導出部12、座標系変換部13、及び反復的特徴検出部14のそれぞれに対応するプログラムをROMに記憶しながら、それら各部に対応する処理をCPUに実行させる。なお、処理対象画像生成部10、特異画素座標取得部11、反復特性導出部12、座標系変換部13、及び反復的特徴検出部14は、それぞれ、電子回路等のハードウェアで構成されていてもよい。
【0026】
画像取得部2は、制御部1で処理される画像を取得する装置であり、例えば、CMOS(Complementary Metal Oxide Semiconductor)やCCD(Charge Coupled Device)等の撮像素子を備えたカメラであって、搬送ローラによって搬送される製品の表面の一部又は全部を断続的に或いは連続的に撮像し、撮像したその製品表面の画像(以下、「表面画像」とする。)を制御部1に対して出力する。
【0027】
出力部3は、各種情報を出力するための装置であり、例えば、制御部1による製品表面にある特異部分の分布に関する特徴の検出結果を表示するためのディスプレイ、又は、その検出結果を音声出力するためのスピーカ等である。
【0028】
次に、制御部1が有する各要素について説明する。
【0029】
処理対象画像生成部10は、画像取得部2が取得した表面画像から製品表面の特異部分を表す画素(以下、「特異画素」とする。)を含む処理対象画像を生成するための要素であり、例えば、その表面画像に各種画像処理を施して特異画素を抽出することによって、それら特異画素が形成する反復的特徴を検出する処理の対象となる処理対象画像を生成する。
【0030】
具体的には、処理対象画像生成部10は、その表面画像に対してその輝度に基づくグレースケール化処理を施し、更に、所定の閾値を用いて二値化処理を施す。この二値化処理は、例えば、その製品の正常な表面を表す輝度値を有する画素の値が「0」で示され、その製品の表面の特異部分を表す輝度値(例えば、その製品の正常な表面を表す輝度値以外の輝度値である。)を有する画素の値が「1」で示されるように実行される。
【0031】
その後、処理対象画像生成部10は、一又は複数の画素で構成される特異画素の集合を代表する一画素(例えば、一纏まりの特異画素集合の中心にある画素であり、以下、「中心画素」とする。)を抽出する中心画素抽出処理を施す。
【0032】
その後、処理対象画像生成部10は、中心画素の値を「1」のままとしながら、中心画素以外の特異画素の値を「0」に設定する。
【0033】
なお、処理対象画像の大きさは、表面画像の全部であってもよく、表面画像の一部であってもよい。
【0034】
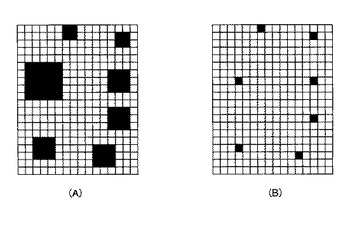
図2は、表面画像上の特異画素群と処理対象画像上の中心画素との間の関係を示す図であり、図2(A)は、グレースケール化処理及び二値化処理が施され中心画素抽出処理が施される前の表面画像を示し、図2(B)は、中心画素抽出処理が施された後の処理対象画像を示す。
【0035】
また、図2(A)は、5画素×5画素の大きさの一つの特異画素集合と、2画素×2画素の大きさの二つの特異画素集合と、3画素×3画素の大きさの四つの特異画素集合とを含む画像を示し、図2(B)は、七つの特異画素集合のそれぞれに対応する1画素の大きさの七つの中心画素を示す。
【0036】
このようにして、処理対象画像生成部10は、その表面画像における一又は複数の特異画素で構成される特異画素集合から中心画素を抽出して処理対象画像を生成し、様々な大きさを有する特異画素集合群のうちの二つの間隔を導き出すことができるようにする。
【0037】
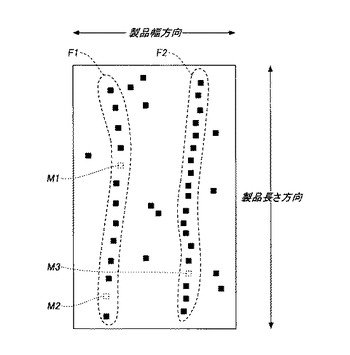
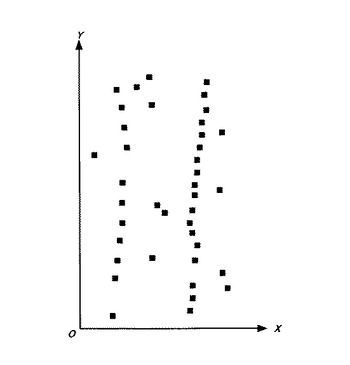
図3は、処理対象画像生成部10が生成した処理対象画像の一例を示す図であり、複数の中心画素群が形成する、製品幅方向に揺動しながら製品長さ方向に伸びる線を描く二つの反復的特徴F1、F2であり、欠落部分M1、M2を含む反復的特徴F1と、欠落部分M3を含む反復的特徴F2とを示す。
【0038】
なお、処理対象画像生成部10は、表面画像にグレースケール化処理及び二値化処理を施すことで、中心画素抽出処理を施すことなく(中心画素を抽出することなく)、処理対象画像を生成するようにしてもよい。この場合、制御部1は、様々な大きさを有する特異画素集合群を含む処理対象画像に対して、反復的特徴を検出するための後述の処理を適用することとなり、後述の記載において「中心画素」は、公知の算出方法によって算出される「特異画素集合の中心」と読み替えられるものとする。
【0039】
特異画素座標取得部11は、特異画素の座標を取得する要素であり、例えば、処理対象画像上に直交XY座標系を設定し、その直交XY座標系における中心画素の座標を取得する。その直交XY座標系の原点は、その処理対象画像の四隅のうちの一点(例えば、図3の処理対象画像における左下隅の一点)とし、そのX軸は、製品幅方向に延び、また、そのY軸は、製品長さ方向に延びるものとする。
【0040】
図4は、処理対象画像上に設定された直交XY座標系の一例を示し、その直交XY座標系の原点が処理対象画像の左下隅の一点に設定され、そのX軸が製品幅方向に延び、また、そのY軸が製品長さ方向に延びることを示す。
【0041】
反復特性導出部12は、後述の座標系変換部13がパラメータとして用いる反復特性(特異画素が形成する反復的特徴の特性である。)を導き出すための要素であり、例えば、特異画素座標取得部11が取得した複数の中心画素の座標群のうちの二つの座標の間隔(以下、「ピッチ」とも称する。)と所定の基準点からその二つの座標のうちの一つまでの間隔をその二つ座標の間隔で除したときの余り(以下、「位相差」とも称する。)とを導き出す。
【0042】
また、反復特性導出部12は、それら複数の中心画素の座標群のうちの二つの座標の全ての組み合わせのそれぞれからそのピッチとその位相差とを導き出してもよく、それら複数の中心画素の座標群のうちの二つの座標の組み合わせからランダムに抽出した組み合わせのそれぞれからそのピッチとその位相差とを導き出してもよく、或いは、それら複数の中心画素の座標群のうちの二つの座標の組み合わせのうちの所定の条件を満たす組み合わせのそれぞれからそのピッチとその位相差とを導き出してもよい。
【0043】
なお、二つの座標の間隔(ピッチ)は、二つの座標間の距離を製品長さ方向に平行な仮想直線上に投影した場合のその仮想直線上の距離を意味する。また、所定の基準点は、例えば、その仮想直線と処理対象画像の縁にある境界線との間の交点である。また、その所定の基準点からその二つの座標のうちの一つまでの間隔は、二つの座標の間隔(ピッチ)と同様、製品長さ方向に平行な仮想直線上に投影した場合のその仮想直線上の距離を意味する。
【0044】
従って、その所定の基準点からその二つの座標のうちの一つまでの間隔をその二つの座標の間隔(ピッチ)で除したときの余り(位相差)は、その所定の基準点から始まってその二つの座標の間隔(ピッチ)で繰り返される仮想的な反復的特徴に対する、実際の反復的特徴の位置ズレ(位相差)を意味することとなる。
【0045】
また、所定の条件を満たす組み合わせは、例えば、その二つの座標を結ぶ直線と製品長さ方向に平行な仮想直線との間の角度が所定範囲内となる組み合わせ(搬送ローラ上の製品の製品幅方向における左右への揺動(変位)が所定の範囲内に収まる場合には反復的特徴によって形成される線の左右への揺動も製品幅方向の所定の範囲内に収まることに起因する。)、又は、その二つの座標の間隔が所定範囲内となる組み合わせ(その間隔が搬送ローラの円周長さに相当することに起因する。この場合、搬送ローラの円周長さ以外の間隔(その円周長さより大きい間隔及びその円周長さより小さい間隔の双方を含む。)を検出対象から除外するようにしてもよい。)等である。
【0046】
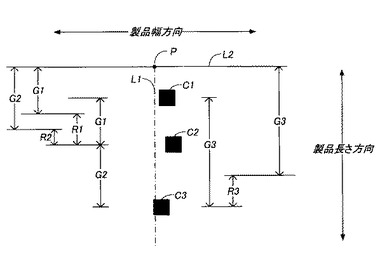
図5は、中心画素が形成する反復的特徴の反復特性を説明するための図であり、処理対象画像上にある中心画素C1〜C3の周辺を拡大した図である。
【0047】
図5は、製品長さ方向にほぼ直線状に異なる間隔で現れる中心画素群のうちの三つの中心画素C1〜C3が、中心画素C1と中心画素C2との間に間隔G1を形成し、中心画素C2と中心画素C3との間に間隔G2を形成し、且つ、中心画素C1と中心画素C3との間に間隔G3を形成することを示す。
【0048】
間隔G1、G2、及びG3はそれぞれ、中心画素C1と中心画素C2との間の距離、中心画素C2と中心画素C3との間の距離、又は中心画素C1と中心画素C3との間の距離を仮想直線L1に投影したときの仮想直線L1上の距離であり、仮想直線L1は、基準点P(処理対象画像の上縁の境界線L2上の点)から製品長さ方向に平行に伸びる直線である。
【0049】
基準点Pと中心画素C2との間隔(基準点Pと中心画素C1との間の距離を仮想直線L1に投影したときの仮想直線L1上の距離である。)を間隔G1で除したときの余りR1は、中心画素C1及びC2を含む間隔G1毎に配置される中心画素群が形成する反復的特徴の、仮想的な反復的特徴(基準点Pから仮想直線L1に沿って間隔G1毎に配置される仮想的な中心画素群が形成する反復的特徴である。)に対する、位置ズレ(位相差)を表す。
【0050】
また、基準点Pと中心画素C2との間隔を間隔G2で除したときの余りR2は、中心画素C2及びC3を含む間隔G2毎に配置される中心画素群が形成する反復的特徴の、仮想的な反復的特徴(基準点Pから仮想直線L1に沿って間隔G2毎に配置される仮想的な中心画素群が形成する反復的特徴である。)に対する、位置ズレ(位相差)を表す。
【0051】
また、基準点Pと中心画素C3との間隔を間隔G3で除したときの余りR3は、中心画素C1及びC3を含む間隔G3毎に配置される中心画素群が形成する反復的特徴の、仮想的な反復的特徴(基準点Pから仮想直線L1に沿って間隔G3毎に配置される仮想的な中心画素群が形成する反復的特徴である。)に対する、位置ズレ(位相差)を表す。
【0052】
なお、図5は、製品長さ方向にほぼ直線状に異なる間隔で現れる中心画素群のうちの三つの中心画素C1〜C3が、三つの異なる間隔G1、G2、G3を形成し得ることを示すが、製品長さ方向にほぼ直線状に異なる間隔で現れる中心画素群のうちの四つの中心画素が六つの異なる間隔を形成し得ること、更には、製品長さ方向にほぼ直線状に異なる間隔で現れる中心画素群のうちの五つ以上の中心画素が更に多くの異なる間隔を形成し得ることは明らかである。
【0053】
反復特性導出部12は、複数の中心画素群によって形成される、製品長さ方向にほぼ直線状に伸びる特徴が、異なるピッチを有する複数種類の反復的特徴を含む場合であっても、それら複数種類の反復的特徴のそれぞれに属するピッチ及び位相差の組み合わせを区別可能に導き出し、導き出したその組み合わせを座標系変換部13に対して出力する。
【0054】
一方で、反復特性導出部12は、複数の中心画素群によって形成される、製品長さ方向にほぼ直線状に伸びる特徴において、特定のピッチ及び特定の位相差の組み合わせを有する反復特性を導き出した場合には、その特定の位相差と同じ位相差とその特定のピッチの整数倍のピッチとの組み合わせを有する反復特性の導出(座標系変換部13に対するその組み合わせの出力)を禁止するようにしてもよい。一の反復特性が複数の反復特性として重複して導き出されてしまうのを防止するためである。
【0055】
座標系変換部13は、直交XY座標系におけるピッチ及び位相差の組み合わせを直交パラメータ座標系における座標に変換するための要素である。
【0056】
具体的には、座標系変換部13は、例えば、直交XY座標系におけるピッチG及び位相差Rを座標軸とする直交パラメータ座標系(直交GR座標系)を設定する。
【0057】
その後、座標系変換部13は、反復特性導出部12が導き出したピッチ及び位相差の組み合わせを、その直交GR座標系上の一座標へ変換し、その直交GR座標系上の各座標への変換の回数をその直交GR座標系上の座標毎に計数する。
【0058】
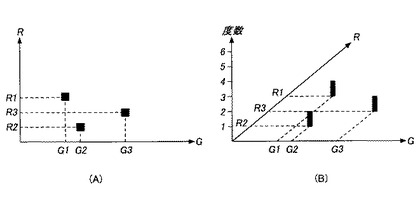
図6は、制御部1が、図5で示される三つの中心画素の座標群のうちの二つの座標の間隔Gと、基準点Pからその二つの座標のうちの一つまでの間隔をその二つの座標の間隔Gで除したときの余りRとの組み合わせを、直交GR座標系における座標に変換する手順を説明するための図である。
【0059】
図6(A)は、二次元直交GR座標系を示し、図6(B)は、その二次元直交GR座標系に変換回数の度数を示す第三の軸を加えた三次元直交座標系を示す。
【0060】
図6(A)は、直交XY座標系における中心画素C1及びC2による反復特性(ピッチG1及び位相差R1の組み合わせ)が直交GR座標系の一座標(G1、R1)に変換され、直交XY座標系における中心画素C2及びC3による反復特性(ピッチG2及び位相差R2の組み合わせ)が直交GR座標系の一座標(G2、R2)に変換され、且つ、直交XY座標系における中心画素C1及びC3による反復特性(ピッチG3及び位相差R3の組み合わせ)が直交GR座標系の一座標(G3、R3)に変換されたことを示す。
【0061】
また、図6(B)は、直交GR座標系の座標(G1、R1)、(G2、R2)、(G3、R3)のそれぞれに関する変換回数が1だけ計数されたことを示す。
【0062】
反復的特徴検出部14は、座標系変換部13による計数結果に基づいて複数の中心画素が形成する反復的特徴を検出する要素であり、例えば、その計数結果を解析し(「解析」は、直交GR座標系上の座標のそれぞれにおける計数結果と所定の閾値とを比較する処理を意味する。)、所定の閾値以上の変換回数を有する直交GR座標系の座標に対応するピッチ及び位相差が表す反復的特徴を、処理対象画像上の複数の中心画素が形成する反復的特徴として検出する。
【0063】
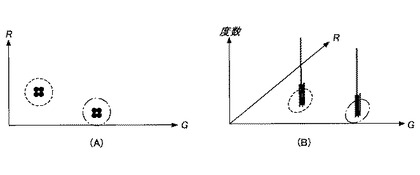
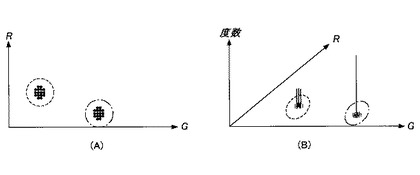
図7及び図8は、座標系変換部13による計数結果を模式的に示す図であり、図6と同様、図7(A)及び図8(A)が二次元直交GR座標系を示し、図7(B)及び図8(B)がその二次元直交GR座標系に度数軸を加えた三次元直交座標系を示す。また、図7は、G軸及びR軸において比較的粗い分解能を有する場合を示し、図8は、G軸及びR軸において比較的細かい分解能を有する場合を示す。
【0064】
また、図7(B)及び図8(B)において、度数軸に平行に上方に伸びる線群の高さは、対応する座標群のそれぞれにおける変換回数を表し、線の高さが高い程、対応する座標への変換回数が多かったことを表す。
【0065】
また、図7及び図8における破線円で表される直交GR座標系の座標群は、直交XY座標系における複数の中心画素群によって形成される製品長さ方向にほぼ直線状に伸びる特徴が、異なるピッチを有する複数種類の反復的特徴で構成される場合に対応する。
【0066】
また、図7及び図8における一点鎖線円で表される直交GR座標系の座標群は、直交XY座標系における複数の中心画素群によって形成される製品長さ方向にほぼ直線状に伸びる特徴が、同じピッチを有する一種類の反復的特徴で構成される場合に対応する。
【0067】
図7(B)で示されるように、分解能が比較的粗い場合には、破線円で表される座標群の計数結果と一点鎖線円で表される座標群の計数結果とがほぼ同じであり、特定の一座標に関する度数が顕著に高い状態を示すため、反復的特徴検出部14は、その特定の一座標に対応するピッチ及び位相差が表す反復的特徴を、処理対象画像上の複数の中心画素が形成する反復的特徴として検出することができる。
【0068】
しかしながら、反復的特徴検出部14は、破線円で表される座標群が潜在的に示す、異なるピッチを有する複数種類の反復的特徴を検出することができない。
【0069】
一方、図8(B)で示されるように、分解能が比較的細かい場合には、破線円で表される座標群の計数結果と一点鎖線円で表される座標群の計数結果とが異なり、一点鎖線円で表される座標群の計数結果では特定の一座標に関する度数が顕著に高い状態を示すのに対し、破線円で表される座標群の計数結果では複数の座標に関する度数が比較的高い状態を示すため、反復的特徴検出部14は、閾値を適切に設定することによって、その特定の一座標に対応するピッチ及び位相差が表す反復的特徴に加え、比較的高い度数を持つ複数の座標群に対応するピッチ及び位相差が表す複数の反復的特徴をも、処理対象画像上の複数の中心画素が形成する反復的特徴として検出することができる。
【0070】
しかしながら、反復的特徴検出部14は、その閾値を低くし過ぎた場合には、反復的特徴として検出されるべきでないノイズを反復的特徴として検出してしまうこととなり、また一方で、その閾値を高くし過ぎた場合には、破線円で表される座標群の計数結果からは何れの反復的特徴をも検出することができないこととなる。
【0071】
そこで、特異部分分布特徴検出装置100は、最初に、処理対象画像上の全ての中心画素に対して、分解能が比較的粗い直交GR座標系を用いて座標系変換部13による投票と反復的特徴検出部14による検出とを実行して中心画素群が形成する反復的特徴を大まかに検出した上で、それら大まかに検出された反復的特徴を形成する中心画素群に対して、再度、分解能が比較的細かい直交GR座標系を用いて座標系変換部13による投票と反復的特徴検出部14による検出とを実行してそれら大まかに検出された反復的特徴を形成する中心画素群が形成するより詳細な反復的特徴を検出するようにしてもよい。
【0072】
これにより、特異部分分布特徴検出装置100は、反復的特徴として検出されるべきでないノイズを反復的特徴として検出するのを防止しながらも、破線円で表される座標群の計数結果から複数の独立した反復的特徴を検出することができる。
【0073】
なお、特異部分分布特徴検出装置100は、上述のように分解能が異なる二つの直交GR座標系を順番に用いて反復的特徴を検出するばかりでなく、分解能が異なる三つ以上の直交GR座標系を順番に用いて反復的特徴を検出するようにしてもよい。
【0074】
また、分解能が比較的細かい直交GR座標系を用いる場合のピッチ方向の分解能は、好適には、関連する複数の搬送ローラの円周長さの違いに起因する反復的特徴のピッチの違いを区別するのに十分に細かい分解能であり、また、二つの中心画素の座標の間のピッチを測る際の測長誤差を顕在化させずに吸収するのに十分に粗い分解能となるように設定される。
【0075】
また、分解能が比較的粗い直交GR座標系を用いる場合のピッチ方向の分解能は、好適には、関連する複数の搬送ローラの円周長さのうちの最小のものに対応する反復的特徴のピッチとノイズとを区別するのに十分に細かい分解能となるように設定される。
【0076】
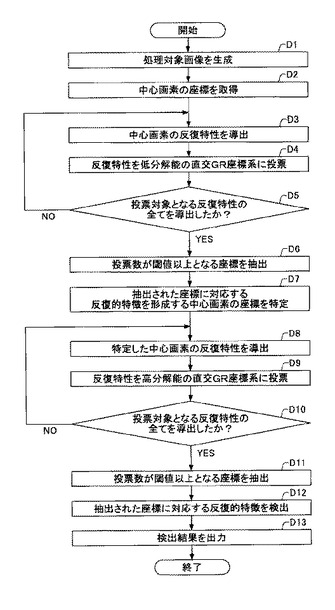
次に、図9を参照しながら、特異部分分布特徴検出装置100が処理対象画像における中心画素の反復的特徴を検出する処理(以下、「反復的特徴検出処理」とする。)の流れについて説明する。なお、図9は、反復的特徴検出処理の流れを示すフローチャートであり、この反復的特徴検出処理は、表面画像が取得される毎に実行されてもよく、複数の表面画像が取得された後にそれら複数の表面画像を一括して処理するように実行されてもよい。
【0077】
最初に、特異部分分布特徴検出装置100の制御部1は、画像取得部2が出力する表面画像を取得すると、処理対象画像生成部10により、表面画像に画像処理(例えば、グレースケール化処理、二値化処理、及び中心画素抽出処理である。)を施して処理対象画像を生成する(ステップD1)。
【0078】
その後、制御部1は、特異画素座標取得部11により、処理対象画像上に設定した直交XY座標系における各中心画素の座標を取得する(ステップD2)。
【0079】
その後、制御部1は、反復特性導出部12により、直交XY座標系における複数の中心画素の座標群のうちの二つの座標の間隔(ピッチ)と所定の基準点からその二つの座標のうちの一つまでの間隔をその二つ座標の間隔で除したときの余り(位相差)との組み合わせを導き出す(ステップD3)。
【0080】
その後、制御部1は、座標系変換部13により、反復特性導出部12が導き出したその直交XY座標系におけるピッチ及び位相差の組み合わせを、分解能が比較的粗い低分解能の直交GR座標系(図7(A)参照。)の一座標に投票する(ステップD4)。
【0081】
その後、制御部1は、直交XY座標系における中心画素の座標群のうちの二つの座標の組み合わせであって、所定の条件を満たす組み合わせの全てに対する、ピッチ及び位相差の導出(ステップD3)並びに低分解能の直交GR座標系への投票(ステップD4)を実行したか否かを判定する(ステップD5)。
【0082】
所定の条件を満たす二つの座標の組み合わせの全てに対する、ピッチ及び位相差の導出並びに低分解能の直交GR座標系への投票を未だ実行していないと判定した場合(ステップD5のNO)、制御部1は、直交XY座標系における中心画素の座標群のうちの二つの座標の別の組み合わせに対する、ピッチ及び位相差の導出並びに低分解能の直交GR座標系への投票を実行する。
【0083】
所定の条件を満たす二つの座標の組み合わせの全てに対する、ピッチ及び位相差の導出並びに低分解能の直交GR座標系への投票を実行したと判定した場合(ステップD5のYES)、制御部1は、反復的特徴検出部14により、投票数が閾値以上となる低分解能の直交GR座標系における座標を抽出する(ステップD6)。
【0084】
その後、制御部1は、反復的特徴検出部14による検出結果に基づいて、処理対象画像における中心画素群のうち、反復的特徴検出部14が現に検出した反復的特徴(低分解能の直交GR座標系における、投票数が閾値以上となる座標に対応するピッチ及び位相差の組み合わせが表す直交XY座標系における反復的特徴である。)を形成する中心画素群を特定する(ステップD7)。
【0085】
その後、制御部1は、反復特性導出部12により、それら特定された中心画素の座標群のうちの二つの座標のピッチと位相差との組み合わせを、反復特性として改めて導き出す(ステップD8)。なお、制御部1は、それら反復特性(ピッチ及び位相差)の値がステップD3における導出の際にRAM等に記憶されている場合には、記憶された反復特性の値をそのまま用いるものとする。
【0086】
その後、制御部1は、座標系変換部13により、反復特性導出部12が現に導き出したその直交XY座標系におけるピッチ及び位相差の組み合わせを、分解能が比較的細かい高分解能の直交GR座標系(図8(A)参照。)の一座標に投票する(ステップD9)。
【0087】
その後、制御部1は、それら特定された中心画素の座標群のうちの二つの座標の組み合わせであって、所定の条件を満たす組み合わせの全てに対する、ピッチ及び位相差の導出(ステップD8)並びに高分解能の直交GR座標系への投票(ステップD9)を実行したか否かを判定する(ステップD10)。
【0088】
所定の条件を満たす二つの座標の組み合わせの全てに対する、ピッチ及び位相差の導出並びに高分解能の直交GR座標系への投票を未だ実行していないと判定した場合(ステップD10のNO)、制御部1は、それら特定された中心画素の座標群のうちの二つの座標の別の組み合わせに対する、ピッチ及び位相差の導出並びに高分解能の直交GR座標系への投票を実行する。
【0089】
所定の条件を満たす二つの座標の組み合わせの全てに対する、ピッチ及び位相差の導出並びに高分解能の直交GR座標系への投票を実行したと判定した場合(ステップD10のYES)、制御部1は、反復的特徴検出部14により、投票数が閾値以上となる高分解能の直交GR座標系における座標を抽出する(ステップD11)。
【0090】
その後、制御部1は、反復的特徴検出部14により、投票数が閾値以上となる高分解能の直交GR座標系における座標に対応するピッチ及び位相差の組み合わせが表す直交XY座標系における反復的特徴を、処理対象画像上の複数の中心画素が形成する反復的特徴として検出する(ステップD12)。
【0091】
その後、制御部1は、反復的特徴検出部14が検出した反復的特徴に関する情報(例えば、反復的特徴の種類の数、各反復的特徴のピッチ及び位相差、各反復的特徴のピッチに対応する円周長さを持つ搬送ローラの識別番号等である。)を出力部3に対して出力し、出力部3がそれら反復的特徴に関する情報を表示或いは音声出力できるようにする(ステップD13)。
【0092】
以上の構成により、特異部分分布特徴検出装置100は、処理対象画像にある中心画素が形成する反復的特徴、ひいては、製品の表面にある特異部分の分布に関する特徴を効率的に検出することができる。
【0093】
また、特異部分分布特徴検出装置100は、ピッチG及び位相差Rを座標軸とする直交GR座標系への投票数に基づいて、中心画素群が形成する反復的特徴を検出するので、中心画素が形成する反復的特徴に欠落部分が存在する場合であっても、その反復的特徴を確実に検出することができる、
また、特異部分分布特徴検出装置100は、ピッチG及び位相差Rを座標軸とする直交GR座標系への投票数に基づいて、中心画素群が形成する反復的特徴を検出するので、ピッチが同じで位相差が異なる複数の反復的特徴が重なり合って存在するような場合であっても、それら複数の反復的特徴を個別に検出することができる。
【0094】
また、特異部分分布特徴検出装置100は、必要に応じて、直交GR座標系の分解能を変化させて計数結果の解析を実行するので、二つの中心画素の座標の間のピッチを測る際の測長誤差を顕在化させずに吸収しながら、中心画素が形成する反復的特徴を検出することができる。
【0095】
また、特異部分分布特徴検出装置100は、検出すべき反復特性(例えば、ピッチGである。)を予め指定することにより、解析の対象となる直交GR座標系上の座標群を、直交GR座標系上の特定の座標群に限定することができ、演算負荷を更に低減させながら、処理対象画像にある中心画素の反復的特徴、ひいては、製品の表面にある特異部分の分布に関する特徴を効率的に検出することができる。
【0096】
また、特異部分分布特徴検出装置100は、解析の対象となる直交GR座標系上の座標群を、特定の座標群から、それらに隣接する座標群を含めた座標群に拡張することができ、処理対象画像にある中心画素の反復的特徴、ひいては、製品の表面にある特異部分の分布に関する特徴をより柔軟に検出することができる。
【0097】
また、特異部分分布特徴検出装置100は、上述のようにして検出した製品の表面にある特異部分の分布に関する特徴に基づいて、その特異部分の発生原因を早期に特定することができるので(例えば、円周長さが異なる複数の搬送ローラのうちの何れの搬送ローラが原因であるかを早期に特定することができる。)、製品の歩留まりを上げることができ、また、不良品の製造を最低限に抑えることができる。
【0098】
また、特異部分分布特徴検出装置100は、上述のようにして検出した製品の表面にある特異部分の分布に関する特徴に基づいて、製品の表面にある模様が意図した通りに形成されたか否かを判定することができる。
【0099】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなしに上述した実施例に種々の変形及び置換を加えることができる。
【0100】
例えば、上述の実施例において、特異部分分布特徴検出装置100は、処理対象画像の全部を対象として、製品長さ方向にほぼ直線状に周期的に現れる中心画素群が形成する反復的特徴を検出するが、ハフ変換アルゴリズム等の直線抽出アルゴリズムを用いて直線状の特徴を検出した上で、処理対象画像のうちその直線状の特徴が存在する部分のみを対象として、その検出された直線状の特徴に含まれる反復的特徴を検出するようにしてもよい。
【0101】
これにより、特異部分分布特徴検出装置100は、製品長さ方向に平行な直線状の特徴が存在しない処理対象画像上の部分にある中心画素群を、ピッチ及び位相差の導出の対象から除外することによって、処理対象画像にある中心画素の反復的特徴、ひいては、製品の表面にある特異部分の分布に関する特徴をより効率的に検出することができる。
【0102】
また、特異部分分布特徴検出装置100は、ピッチ及び位相差の導出の対象を処理対象画像上の一部の帯状領域(製品幅方向に一定の幅を有し製品長さ方向に延びる領域である。)に限定することによって、同じピッチを有するものの製品幅方向に離れて独立して存在する二つの中心画素の複数の組み合わせが、同じ反復的特徴を形成するものとして誤って投票されるのを防止することができる。
【符号の説明】
【0103】
1 制御部
2 画像取得部
3 出力部
10 処理対象画像生成部
11 特異画素座標取得部
12 反復特性導出部
13 座標系変換部
14 反復的特徴検出部
100 特異部分分布特徴検出装置
【技術分野】
【0001】
本発明は、製品の表面にある特異部分の分布に関する特徴を検出するための特異部分分布特徴検出装置及び特異部分分布特徴検出方法に関し、特に、その製品の表面を表す画像において反復的に現れる特異部分を表す特異画素の分布に関する特徴を検出することでその製品の表面にある特異部分の分布に関する特徴を検出する特異部分分布特徴検出装置及び特異部分分布特徴検出方法に関する。
【背景技術】
【0002】
従来、画像から直線を抽出するためのハフ変換アルゴリズムを利用した技術が知られている(例えば、特許文献1〜4が知られている。)。
【0003】
最初に、ハフ変換アルゴリズムは、直交XY座標系上(原画像上)の一座標(一点)を通る任意の直線に対する原点(X=0、Y=0)から下ろした法線の長さρと角度θとを二つの座標軸とする直交パラメータ座標系を設定する。
【0004】
その後、ハフ変換アルゴリズムは、抽出対象の直線を構成する座標群(点群)を含む直交XY座標系の点群(例えば、その輝度値が閾値以上となる点群である。)のうちの一点を通る(ρ、θで表される)直線群を直交パラメータ座標系における点群のそれぞれに投票する(「投票」は、直交XY座標系における直線を直交パラメータ座標系における座標に変換した場合にその座標に関する変換回数を1だけ計数する処理を意味する。)。
【0005】
その後、ハフ変換アルゴリズムは、それら直交XY座標系上の直線群の全てについてこの投票を繰り返すことによって、抽出対象の直線を構成する点群に関する直交パラメータ座標系上の特定の座標に関する投票数が顕著に増大することを利用して、その抽出対象の直線を抽出する。
【0006】
上述の基本原理に加えて、特許文献1は、最小二乗法を併用して画像内の矩形の2次元コード図形を切り出す方法を開示している。
【0007】
また、特許文献2は、直線をより高精度に抽出するために、その直線を前処理により概略的に検出し、その概略的に検出された直線の長さに基づいて直交パラメータ座標系におけるρ、θのサンプリング間隔Δρ、Δθを決定する方法を開示している。
【0008】
また、特許文献3は、投票回数を低減させるために、抽出しようとする直線(道路境界線)の延在方向に応じて直交パラメータ座標系におけるθの値の範囲を限定し、且つ、抽出しようとする道路境界線と抽出対象でない他の直線との色の違いを利用して、投票の対象となる直交XY座標系上の点群の数を限定する方法を開示している。
【0009】
また、特許文献4は、直交パラメータ座標系における複数の小区間ΔD内の座標群の投票数をまとめた上で直交XY座標系(放射線撮影画像)における直線を大まかに抽出し、その後改めて小区間ΔD内の座標毎の投票数に基づいて放射線撮影画像における直線をより厳密に特定して、放射線撮影画像における矩形の照射野輪郭PSを検出する方法を開示している。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平7−220081号公報
【特許文献2】特開平11−66302号公報
【特許文献3】特開平6−337936号公報
【特許文献4】特開2006−293522号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、特許文献1〜4に記載の方法はいずれも、ρ及びθを二つの座標軸とする直交パラメータ座標系への投票を行うハフ変換アルゴリズムを用いて画像内の直線を抽出するためのものであり、画像内で反復的に現れる特異部分を表す特異画素の分布に関する特徴を抽出することはできない。
【0012】
上述の点に鑑み、本発明は、製品の表面を表す画像において反復的に現れる特異部分を表す特異画素の分布に関する特徴を検出することによってその製品の表面にある特異部分の分布に関する特徴を検出する特異部分分布特徴検出装置及び特異部分分布特徴検出方法を提供することを目的とする。
【課題を解決するための手段】
【0013】
上述の目的を達成するために、本発明の実施例に係る特異部分分布特徴検出装置は、製品の表面にある特異部分の分布に関する特徴を検出する特異部分分布特徴検出装置であって、前記製品の表面を撮影して表面画像を取得する画像取得部と、前記表面画像から製品の表面にある特異部分を表す複数の特異画素を含む処理対象画像を生成する処理対象画像生成部と、前記処理対象画像上に直交XY座標系を設定し、該直交XY座標系における前記特異画素の座標を取得する特異画素座標取得部と、前記複数の特異画素の座標のうちの二つの座標の間隔と所定の基準点から該二つの座標のうちの一つまでの間隔を該二つの座標の間隔で除したときの余りとの組み合わせを反復特性として導き出す反復特性導出部と、 前記間隔と前記余りとを座標軸とする直交パラメータ座標系を用いて、前記反復特性導出部が導き出す組み合わせの、該直交パラメータ座標系上の一座標への変換を実行し、該直交パラメータ座標系上の各座標への変換の回数を該直交パラメータ座標系上の座標毎に計数して計数結果を出力する座標系変換部と、前記座標系変換部による計数結果の解析に基づいて前記複数の特異画素が形成する反復的特徴を検出する反復的特徴検出部と、を備えることを特徴とする。
【0014】
また、前記反復的特徴検出部は、前記直交パラメータ座標系の一座標における計数結果が閾値を超える場合に、該一座標に対応する前記直交XY座標系における前記複数の特異画素が表す反復的特徴を、前記製品の表面にある特異部分が形成する反復的特徴として検出することが好ましい。
【0015】
また、前記座標系変換部は、前記反復特性導出部が導き出す前記間隔と前記余りとの組み合わせを、第一の分解能を有する第一の直交パラメータ座標系上の一座標へ変換して第一の計数結果を出力し、前記反復的特徴検出部は、前記第一の計数結果の解析に基づいて前記複数の特異画素が形成する第一の反復的特徴を検出し、前記座標系変換部は、前記第一の反復的特徴を形成する複数の特異画素の座標のうちの二つの座標の前記間隔と前記余りとの組み合わせを、前記第一の分解能より細かい第二の分解能を有する第二の直交パラメータ座標系上の一座標へ変換して第二の計数結果を出力し、前記反復的特徴検出部は、前記第二の計数結果の解析に基づいて前記第一の反復的特徴を形成する複数の特異画素が形成する第二の反復的特徴を検出することが好ましい。
【0016】
また、本発明の実施例に係る特異部分分布特徴検出方法は、製品の表面にある特異部分の分布に関する特徴を検出する特異部分分布特徴検出方法であって、前記製品の表面を撮影して表面画像を取得する画像取得ステップと、前記表面画像から製品の表面にある特異部分を表す複数の特異画素を含む処理対象画像を生成する処理対象画像生成ステップと、前記処理対象画像上に直交XY座標系を設定し、該直交XY座標系における前記特異画素の座標を取得する特異画素座標取得ステップと、前記複数の特異画素の座標のうちの二つの座標の間隔と所定の基準点から該二つの座標のうちの一つまでの間隔を該二つの座標の間隔で除したときの余りとの組み合わせを反復特性として導き出す反復特性導出ステップと、前記間隔と前記余りとを座標軸とする直交パラメータ座標系を用いて、前記反復特性導出ステップにおいて導き出される組み合わせの、該直交パラメータ座標系上の一座標への変換を実行し、該直交パラメータ座標系上の各座標への変換の回数を該直交パラメータ座標系上の座標毎に計数して計数結果を出力する座標系変換ステップと、前記座標系変換ステップにおける計数結果の解析に基づいて前記複数の特異画素が形成する反復的特徴を検出する反復的特徴検出ステップと、を備えることを特徴とする。
【発明の効果】
【0017】
上述の手段により、本発明は、製品の表面を表す画像において反復的に現れる特異部分を表す特異画素の分布に関する特徴を検出することによってその製品の表面にある特異部分の分布に関する特徴を検出する特異部分分布特徴検出装置及び特異部分分布特徴検出方法を提供することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施例に係る特異部分分布特徴検出装置の構成例を示すブロック図である。
【図2】表面画像上の特異画素群と処理対象画像上の中心画素との間の関係を示す図である。
【図3】処理対象画像生成部が生成した処理対象画像の一例を示す図である。
【図4】処理対象画像上に設定された直交XY座標系の一例を示す図である。
【図5】中心画素が形成する反復的特徴の反復特性を説明するための図である。
【図6】中心画素の座標群のうちの二つの座標のピッチと位相差との組み合わせを、直交GR座標系における座標に変換する手順を説明するための図である。
【図7】座標系変換部による計数結果を模式的に示す図(その1)である。
【図8】座標系変換部による計数結果を模式的に示す図(その2)である。
【図9】反復的特徴検出処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0019】
以下、図面を参照しつつ、本発明を実施するための最良の形態の説明を行う。
【0020】
図1は、本発明の実施例に係る特異部分分布特徴検出装置100の構成例を示すブロック図である。
【0021】
特異部分分布特徴検出装置100は、平坦な表面を有する製品のその表面にある特異部分の分布に関する特徴を検出するための装置であり、制御部1、画像取得部2、及び出力部3を有する。
【0022】
平坦な表面を有する製品は、例えば、複数の搬送ローラを利用して製造工程内を搬送される長尺の物である。
【0023】
製品の表面にある特異部分は、製品表面の他の部分と特性(例えば、輝き、粗さ、凹凸等の度合いである。)が異なる部分であり、例えば、搬送ローラにおける傷や付着ゴミによってその製品に周期的或いは連続的に転写される凹み等であり、その特異部分は、製品の搬送方向に平行な線状の分布を形成する。なお、その特異部分が形成する線は、通常、直線状の分布を形成するが、搬送ローラによる製品搬送中にその製品が搬送ローラ上を製品幅方向に左右に揺動することに起因して、左右に揺動する曲線又はジグザグ線となる場合もある。
【0024】
また、製品の表面にある特異部分は、上述のように意に反して形成されたものばかりでなく、意図的に形成される模様を構成するものであってもよい。
【0025】
制御部1は、CPU(Central Processing Unit)、RAM(Random Access Memory)、ROM(Read Only Memory)等を備えたコンピュータであって、例えば、処理対象画像生成部10、特異画素座標取得部11、反復特性導出部12、座標系変換部13、及び反復的特徴検出部14のそれぞれに対応するプログラムをROMに記憶しながら、それら各部に対応する処理をCPUに実行させる。なお、処理対象画像生成部10、特異画素座標取得部11、反復特性導出部12、座標系変換部13、及び反復的特徴検出部14は、それぞれ、電子回路等のハードウェアで構成されていてもよい。
【0026】
画像取得部2は、制御部1で処理される画像を取得する装置であり、例えば、CMOS(Complementary Metal Oxide Semiconductor)やCCD(Charge Coupled Device)等の撮像素子を備えたカメラであって、搬送ローラによって搬送される製品の表面の一部又は全部を断続的に或いは連続的に撮像し、撮像したその製品表面の画像(以下、「表面画像」とする。)を制御部1に対して出力する。
【0027】
出力部3は、各種情報を出力するための装置であり、例えば、制御部1による製品表面にある特異部分の分布に関する特徴の検出結果を表示するためのディスプレイ、又は、その検出結果を音声出力するためのスピーカ等である。
【0028】
次に、制御部1が有する各要素について説明する。
【0029】
処理対象画像生成部10は、画像取得部2が取得した表面画像から製品表面の特異部分を表す画素(以下、「特異画素」とする。)を含む処理対象画像を生成するための要素であり、例えば、その表面画像に各種画像処理を施して特異画素を抽出することによって、それら特異画素が形成する反復的特徴を検出する処理の対象となる処理対象画像を生成する。
【0030】
具体的には、処理対象画像生成部10は、その表面画像に対してその輝度に基づくグレースケール化処理を施し、更に、所定の閾値を用いて二値化処理を施す。この二値化処理は、例えば、その製品の正常な表面を表す輝度値を有する画素の値が「0」で示され、その製品の表面の特異部分を表す輝度値(例えば、その製品の正常な表面を表す輝度値以外の輝度値である。)を有する画素の値が「1」で示されるように実行される。
【0031】
その後、処理対象画像生成部10は、一又は複数の画素で構成される特異画素の集合を代表する一画素(例えば、一纏まりの特異画素集合の中心にある画素であり、以下、「中心画素」とする。)を抽出する中心画素抽出処理を施す。
【0032】
その後、処理対象画像生成部10は、中心画素の値を「1」のままとしながら、中心画素以外の特異画素の値を「0」に設定する。
【0033】
なお、処理対象画像の大きさは、表面画像の全部であってもよく、表面画像の一部であってもよい。
【0034】
図2は、表面画像上の特異画素群と処理対象画像上の中心画素との間の関係を示す図であり、図2(A)は、グレースケール化処理及び二値化処理が施され中心画素抽出処理が施される前の表面画像を示し、図2(B)は、中心画素抽出処理が施された後の処理対象画像を示す。
【0035】
また、図2(A)は、5画素×5画素の大きさの一つの特異画素集合と、2画素×2画素の大きさの二つの特異画素集合と、3画素×3画素の大きさの四つの特異画素集合とを含む画像を示し、図2(B)は、七つの特異画素集合のそれぞれに対応する1画素の大きさの七つの中心画素を示す。
【0036】
このようにして、処理対象画像生成部10は、その表面画像における一又は複数の特異画素で構成される特異画素集合から中心画素を抽出して処理対象画像を生成し、様々な大きさを有する特異画素集合群のうちの二つの間隔を導き出すことができるようにする。
【0037】
図3は、処理対象画像生成部10が生成した処理対象画像の一例を示す図であり、複数の中心画素群が形成する、製品幅方向に揺動しながら製品長さ方向に伸びる線を描く二つの反復的特徴F1、F2であり、欠落部分M1、M2を含む反復的特徴F1と、欠落部分M3を含む反復的特徴F2とを示す。
【0038】
なお、処理対象画像生成部10は、表面画像にグレースケール化処理及び二値化処理を施すことで、中心画素抽出処理を施すことなく(中心画素を抽出することなく)、処理対象画像を生成するようにしてもよい。この場合、制御部1は、様々な大きさを有する特異画素集合群を含む処理対象画像に対して、反復的特徴を検出するための後述の処理を適用することとなり、後述の記載において「中心画素」は、公知の算出方法によって算出される「特異画素集合の中心」と読み替えられるものとする。
【0039】
特異画素座標取得部11は、特異画素の座標を取得する要素であり、例えば、処理対象画像上に直交XY座標系を設定し、その直交XY座標系における中心画素の座標を取得する。その直交XY座標系の原点は、その処理対象画像の四隅のうちの一点(例えば、図3の処理対象画像における左下隅の一点)とし、そのX軸は、製品幅方向に延び、また、そのY軸は、製品長さ方向に延びるものとする。
【0040】
図4は、処理対象画像上に設定された直交XY座標系の一例を示し、その直交XY座標系の原点が処理対象画像の左下隅の一点に設定され、そのX軸が製品幅方向に延び、また、そのY軸が製品長さ方向に延びることを示す。
【0041】
反復特性導出部12は、後述の座標系変換部13がパラメータとして用いる反復特性(特異画素が形成する反復的特徴の特性である。)を導き出すための要素であり、例えば、特異画素座標取得部11が取得した複数の中心画素の座標群のうちの二つの座標の間隔(以下、「ピッチ」とも称する。)と所定の基準点からその二つの座標のうちの一つまでの間隔をその二つ座標の間隔で除したときの余り(以下、「位相差」とも称する。)とを導き出す。
【0042】
また、反復特性導出部12は、それら複数の中心画素の座標群のうちの二つの座標の全ての組み合わせのそれぞれからそのピッチとその位相差とを導き出してもよく、それら複数の中心画素の座標群のうちの二つの座標の組み合わせからランダムに抽出した組み合わせのそれぞれからそのピッチとその位相差とを導き出してもよく、或いは、それら複数の中心画素の座標群のうちの二つの座標の組み合わせのうちの所定の条件を満たす組み合わせのそれぞれからそのピッチとその位相差とを導き出してもよい。
【0043】
なお、二つの座標の間隔(ピッチ)は、二つの座標間の距離を製品長さ方向に平行な仮想直線上に投影した場合のその仮想直線上の距離を意味する。また、所定の基準点は、例えば、その仮想直線と処理対象画像の縁にある境界線との間の交点である。また、その所定の基準点からその二つの座標のうちの一つまでの間隔は、二つの座標の間隔(ピッチ)と同様、製品長さ方向に平行な仮想直線上に投影した場合のその仮想直線上の距離を意味する。
【0044】
従って、その所定の基準点からその二つの座標のうちの一つまでの間隔をその二つの座標の間隔(ピッチ)で除したときの余り(位相差)は、その所定の基準点から始まってその二つの座標の間隔(ピッチ)で繰り返される仮想的な反復的特徴に対する、実際の反復的特徴の位置ズレ(位相差)を意味することとなる。
【0045】
また、所定の条件を満たす組み合わせは、例えば、その二つの座標を結ぶ直線と製品長さ方向に平行な仮想直線との間の角度が所定範囲内となる組み合わせ(搬送ローラ上の製品の製品幅方向における左右への揺動(変位)が所定の範囲内に収まる場合には反復的特徴によって形成される線の左右への揺動も製品幅方向の所定の範囲内に収まることに起因する。)、又は、その二つの座標の間隔が所定範囲内となる組み合わせ(その間隔が搬送ローラの円周長さに相当することに起因する。この場合、搬送ローラの円周長さ以外の間隔(その円周長さより大きい間隔及びその円周長さより小さい間隔の双方を含む。)を検出対象から除外するようにしてもよい。)等である。
【0046】
図5は、中心画素が形成する反復的特徴の反復特性を説明するための図であり、処理対象画像上にある中心画素C1〜C3の周辺を拡大した図である。
【0047】
図5は、製品長さ方向にほぼ直線状に異なる間隔で現れる中心画素群のうちの三つの中心画素C1〜C3が、中心画素C1と中心画素C2との間に間隔G1を形成し、中心画素C2と中心画素C3との間に間隔G2を形成し、且つ、中心画素C1と中心画素C3との間に間隔G3を形成することを示す。
【0048】
間隔G1、G2、及びG3はそれぞれ、中心画素C1と中心画素C2との間の距離、中心画素C2と中心画素C3との間の距離、又は中心画素C1と中心画素C3との間の距離を仮想直線L1に投影したときの仮想直線L1上の距離であり、仮想直線L1は、基準点P(処理対象画像の上縁の境界線L2上の点)から製品長さ方向に平行に伸びる直線である。
【0049】
基準点Pと中心画素C2との間隔(基準点Pと中心画素C1との間の距離を仮想直線L1に投影したときの仮想直線L1上の距離である。)を間隔G1で除したときの余りR1は、中心画素C1及びC2を含む間隔G1毎に配置される中心画素群が形成する反復的特徴の、仮想的な反復的特徴(基準点Pから仮想直線L1に沿って間隔G1毎に配置される仮想的な中心画素群が形成する反復的特徴である。)に対する、位置ズレ(位相差)を表す。
【0050】
また、基準点Pと中心画素C2との間隔を間隔G2で除したときの余りR2は、中心画素C2及びC3を含む間隔G2毎に配置される中心画素群が形成する反復的特徴の、仮想的な反復的特徴(基準点Pから仮想直線L1に沿って間隔G2毎に配置される仮想的な中心画素群が形成する反復的特徴である。)に対する、位置ズレ(位相差)を表す。
【0051】
また、基準点Pと中心画素C3との間隔を間隔G3で除したときの余りR3は、中心画素C1及びC3を含む間隔G3毎に配置される中心画素群が形成する反復的特徴の、仮想的な反復的特徴(基準点Pから仮想直線L1に沿って間隔G3毎に配置される仮想的な中心画素群が形成する反復的特徴である。)に対する、位置ズレ(位相差)を表す。
【0052】
なお、図5は、製品長さ方向にほぼ直線状に異なる間隔で現れる中心画素群のうちの三つの中心画素C1〜C3が、三つの異なる間隔G1、G2、G3を形成し得ることを示すが、製品長さ方向にほぼ直線状に異なる間隔で現れる中心画素群のうちの四つの中心画素が六つの異なる間隔を形成し得ること、更には、製品長さ方向にほぼ直線状に異なる間隔で現れる中心画素群のうちの五つ以上の中心画素が更に多くの異なる間隔を形成し得ることは明らかである。
【0053】
反復特性導出部12は、複数の中心画素群によって形成される、製品長さ方向にほぼ直線状に伸びる特徴が、異なるピッチを有する複数種類の反復的特徴を含む場合であっても、それら複数種類の反復的特徴のそれぞれに属するピッチ及び位相差の組み合わせを区別可能に導き出し、導き出したその組み合わせを座標系変換部13に対して出力する。
【0054】
一方で、反復特性導出部12は、複数の中心画素群によって形成される、製品長さ方向にほぼ直線状に伸びる特徴において、特定のピッチ及び特定の位相差の組み合わせを有する反復特性を導き出した場合には、その特定の位相差と同じ位相差とその特定のピッチの整数倍のピッチとの組み合わせを有する反復特性の導出(座標系変換部13に対するその組み合わせの出力)を禁止するようにしてもよい。一の反復特性が複数の反復特性として重複して導き出されてしまうのを防止するためである。
【0055】
座標系変換部13は、直交XY座標系におけるピッチ及び位相差の組み合わせを直交パラメータ座標系における座標に変換するための要素である。
【0056】
具体的には、座標系変換部13は、例えば、直交XY座標系におけるピッチG及び位相差Rを座標軸とする直交パラメータ座標系(直交GR座標系)を設定する。
【0057】
その後、座標系変換部13は、反復特性導出部12が導き出したピッチ及び位相差の組み合わせを、その直交GR座標系上の一座標へ変換し、その直交GR座標系上の各座標への変換の回数をその直交GR座標系上の座標毎に計数する。
【0058】
図6は、制御部1が、図5で示される三つの中心画素の座標群のうちの二つの座標の間隔Gと、基準点Pからその二つの座標のうちの一つまでの間隔をその二つの座標の間隔Gで除したときの余りRとの組み合わせを、直交GR座標系における座標に変換する手順を説明するための図である。
【0059】
図6(A)は、二次元直交GR座標系を示し、図6(B)は、その二次元直交GR座標系に変換回数の度数を示す第三の軸を加えた三次元直交座標系を示す。
【0060】
図6(A)は、直交XY座標系における中心画素C1及びC2による反復特性(ピッチG1及び位相差R1の組み合わせ)が直交GR座標系の一座標(G1、R1)に変換され、直交XY座標系における中心画素C2及びC3による反復特性(ピッチG2及び位相差R2の組み合わせ)が直交GR座標系の一座標(G2、R2)に変換され、且つ、直交XY座標系における中心画素C1及びC3による反復特性(ピッチG3及び位相差R3の組み合わせ)が直交GR座標系の一座標(G3、R3)に変換されたことを示す。
【0061】
また、図6(B)は、直交GR座標系の座標(G1、R1)、(G2、R2)、(G3、R3)のそれぞれに関する変換回数が1だけ計数されたことを示す。
【0062】
反復的特徴検出部14は、座標系変換部13による計数結果に基づいて複数の中心画素が形成する反復的特徴を検出する要素であり、例えば、その計数結果を解析し(「解析」は、直交GR座標系上の座標のそれぞれにおける計数結果と所定の閾値とを比較する処理を意味する。)、所定の閾値以上の変換回数を有する直交GR座標系の座標に対応するピッチ及び位相差が表す反復的特徴を、処理対象画像上の複数の中心画素が形成する反復的特徴として検出する。
【0063】
図7及び図8は、座標系変換部13による計数結果を模式的に示す図であり、図6と同様、図7(A)及び図8(A)が二次元直交GR座標系を示し、図7(B)及び図8(B)がその二次元直交GR座標系に度数軸を加えた三次元直交座標系を示す。また、図7は、G軸及びR軸において比較的粗い分解能を有する場合を示し、図8は、G軸及びR軸において比較的細かい分解能を有する場合を示す。
【0064】
また、図7(B)及び図8(B)において、度数軸に平行に上方に伸びる線群の高さは、対応する座標群のそれぞれにおける変換回数を表し、線の高さが高い程、対応する座標への変換回数が多かったことを表す。
【0065】
また、図7及び図8における破線円で表される直交GR座標系の座標群は、直交XY座標系における複数の中心画素群によって形成される製品長さ方向にほぼ直線状に伸びる特徴が、異なるピッチを有する複数種類の反復的特徴で構成される場合に対応する。
【0066】
また、図7及び図8における一点鎖線円で表される直交GR座標系の座標群は、直交XY座標系における複数の中心画素群によって形成される製品長さ方向にほぼ直線状に伸びる特徴が、同じピッチを有する一種類の反復的特徴で構成される場合に対応する。
【0067】
図7(B)で示されるように、分解能が比較的粗い場合には、破線円で表される座標群の計数結果と一点鎖線円で表される座標群の計数結果とがほぼ同じであり、特定の一座標に関する度数が顕著に高い状態を示すため、反復的特徴検出部14は、その特定の一座標に対応するピッチ及び位相差が表す反復的特徴を、処理対象画像上の複数の中心画素が形成する反復的特徴として検出することができる。
【0068】
しかしながら、反復的特徴検出部14は、破線円で表される座標群が潜在的に示す、異なるピッチを有する複数種類の反復的特徴を検出することができない。
【0069】
一方、図8(B)で示されるように、分解能が比較的細かい場合には、破線円で表される座標群の計数結果と一点鎖線円で表される座標群の計数結果とが異なり、一点鎖線円で表される座標群の計数結果では特定の一座標に関する度数が顕著に高い状態を示すのに対し、破線円で表される座標群の計数結果では複数の座標に関する度数が比較的高い状態を示すため、反復的特徴検出部14は、閾値を適切に設定することによって、その特定の一座標に対応するピッチ及び位相差が表す反復的特徴に加え、比較的高い度数を持つ複数の座標群に対応するピッチ及び位相差が表す複数の反復的特徴をも、処理対象画像上の複数の中心画素が形成する反復的特徴として検出することができる。
【0070】
しかしながら、反復的特徴検出部14は、その閾値を低くし過ぎた場合には、反復的特徴として検出されるべきでないノイズを反復的特徴として検出してしまうこととなり、また一方で、その閾値を高くし過ぎた場合には、破線円で表される座標群の計数結果からは何れの反復的特徴をも検出することができないこととなる。
【0071】
そこで、特異部分分布特徴検出装置100は、最初に、処理対象画像上の全ての中心画素に対して、分解能が比較的粗い直交GR座標系を用いて座標系変換部13による投票と反復的特徴検出部14による検出とを実行して中心画素群が形成する反復的特徴を大まかに検出した上で、それら大まかに検出された反復的特徴を形成する中心画素群に対して、再度、分解能が比較的細かい直交GR座標系を用いて座標系変換部13による投票と反復的特徴検出部14による検出とを実行してそれら大まかに検出された反復的特徴を形成する中心画素群が形成するより詳細な反復的特徴を検出するようにしてもよい。
【0072】
これにより、特異部分分布特徴検出装置100は、反復的特徴として検出されるべきでないノイズを反復的特徴として検出するのを防止しながらも、破線円で表される座標群の計数結果から複数の独立した反復的特徴を検出することができる。
【0073】
なお、特異部分分布特徴検出装置100は、上述のように分解能が異なる二つの直交GR座標系を順番に用いて反復的特徴を検出するばかりでなく、分解能が異なる三つ以上の直交GR座標系を順番に用いて反復的特徴を検出するようにしてもよい。
【0074】
また、分解能が比較的細かい直交GR座標系を用いる場合のピッチ方向の分解能は、好適には、関連する複数の搬送ローラの円周長さの違いに起因する反復的特徴のピッチの違いを区別するのに十分に細かい分解能であり、また、二つの中心画素の座標の間のピッチを測る際の測長誤差を顕在化させずに吸収するのに十分に粗い分解能となるように設定される。
【0075】
また、分解能が比較的粗い直交GR座標系を用いる場合のピッチ方向の分解能は、好適には、関連する複数の搬送ローラの円周長さのうちの最小のものに対応する反復的特徴のピッチとノイズとを区別するのに十分に細かい分解能となるように設定される。
【0076】
次に、図9を参照しながら、特異部分分布特徴検出装置100が処理対象画像における中心画素の反復的特徴を検出する処理(以下、「反復的特徴検出処理」とする。)の流れについて説明する。なお、図9は、反復的特徴検出処理の流れを示すフローチャートであり、この反復的特徴検出処理は、表面画像が取得される毎に実行されてもよく、複数の表面画像が取得された後にそれら複数の表面画像を一括して処理するように実行されてもよい。
【0077】
最初に、特異部分分布特徴検出装置100の制御部1は、画像取得部2が出力する表面画像を取得すると、処理対象画像生成部10により、表面画像に画像処理(例えば、グレースケール化処理、二値化処理、及び中心画素抽出処理である。)を施して処理対象画像を生成する(ステップD1)。
【0078】
その後、制御部1は、特異画素座標取得部11により、処理対象画像上に設定した直交XY座標系における各中心画素の座標を取得する(ステップD2)。
【0079】
その後、制御部1は、反復特性導出部12により、直交XY座標系における複数の中心画素の座標群のうちの二つの座標の間隔(ピッチ)と所定の基準点からその二つの座標のうちの一つまでの間隔をその二つ座標の間隔で除したときの余り(位相差)との組み合わせを導き出す(ステップD3)。
【0080】
その後、制御部1は、座標系変換部13により、反復特性導出部12が導き出したその直交XY座標系におけるピッチ及び位相差の組み合わせを、分解能が比較的粗い低分解能の直交GR座標系(図7(A)参照。)の一座標に投票する(ステップD4)。
【0081】
その後、制御部1は、直交XY座標系における中心画素の座標群のうちの二つの座標の組み合わせであって、所定の条件を満たす組み合わせの全てに対する、ピッチ及び位相差の導出(ステップD3)並びに低分解能の直交GR座標系への投票(ステップD4)を実行したか否かを判定する(ステップD5)。
【0082】
所定の条件を満たす二つの座標の組み合わせの全てに対する、ピッチ及び位相差の導出並びに低分解能の直交GR座標系への投票を未だ実行していないと判定した場合(ステップD5のNO)、制御部1は、直交XY座標系における中心画素の座標群のうちの二つの座標の別の組み合わせに対する、ピッチ及び位相差の導出並びに低分解能の直交GR座標系への投票を実行する。
【0083】
所定の条件を満たす二つの座標の組み合わせの全てに対する、ピッチ及び位相差の導出並びに低分解能の直交GR座標系への投票を実行したと判定した場合(ステップD5のYES)、制御部1は、反復的特徴検出部14により、投票数が閾値以上となる低分解能の直交GR座標系における座標を抽出する(ステップD6)。
【0084】
その後、制御部1は、反復的特徴検出部14による検出結果に基づいて、処理対象画像における中心画素群のうち、反復的特徴検出部14が現に検出した反復的特徴(低分解能の直交GR座標系における、投票数が閾値以上となる座標に対応するピッチ及び位相差の組み合わせが表す直交XY座標系における反復的特徴である。)を形成する中心画素群を特定する(ステップD7)。
【0085】
その後、制御部1は、反復特性導出部12により、それら特定された中心画素の座標群のうちの二つの座標のピッチと位相差との組み合わせを、反復特性として改めて導き出す(ステップD8)。なお、制御部1は、それら反復特性(ピッチ及び位相差)の値がステップD3における導出の際にRAM等に記憶されている場合には、記憶された反復特性の値をそのまま用いるものとする。
【0086】
その後、制御部1は、座標系変換部13により、反復特性導出部12が現に導き出したその直交XY座標系におけるピッチ及び位相差の組み合わせを、分解能が比較的細かい高分解能の直交GR座標系(図8(A)参照。)の一座標に投票する(ステップD9)。
【0087】
その後、制御部1は、それら特定された中心画素の座標群のうちの二つの座標の組み合わせであって、所定の条件を満たす組み合わせの全てに対する、ピッチ及び位相差の導出(ステップD8)並びに高分解能の直交GR座標系への投票(ステップD9)を実行したか否かを判定する(ステップD10)。
【0088】
所定の条件を満たす二つの座標の組み合わせの全てに対する、ピッチ及び位相差の導出並びに高分解能の直交GR座標系への投票を未だ実行していないと判定した場合(ステップD10のNO)、制御部1は、それら特定された中心画素の座標群のうちの二つの座標の別の組み合わせに対する、ピッチ及び位相差の導出並びに高分解能の直交GR座標系への投票を実行する。
【0089】
所定の条件を満たす二つの座標の組み合わせの全てに対する、ピッチ及び位相差の導出並びに高分解能の直交GR座標系への投票を実行したと判定した場合(ステップD10のYES)、制御部1は、反復的特徴検出部14により、投票数が閾値以上となる高分解能の直交GR座標系における座標を抽出する(ステップD11)。
【0090】
その後、制御部1は、反復的特徴検出部14により、投票数が閾値以上となる高分解能の直交GR座標系における座標に対応するピッチ及び位相差の組み合わせが表す直交XY座標系における反復的特徴を、処理対象画像上の複数の中心画素が形成する反復的特徴として検出する(ステップD12)。
【0091】
その後、制御部1は、反復的特徴検出部14が検出した反復的特徴に関する情報(例えば、反復的特徴の種類の数、各反復的特徴のピッチ及び位相差、各反復的特徴のピッチに対応する円周長さを持つ搬送ローラの識別番号等である。)を出力部3に対して出力し、出力部3がそれら反復的特徴に関する情報を表示或いは音声出力できるようにする(ステップD13)。
【0092】
以上の構成により、特異部分分布特徴検出装置100は、処理対象画像にある中心画素が形成する反復的特徴、ひいては、製品の表面にある特異部分の分布に関する特徴を効率的に検出することができる。
【0093】
また、特異部分分布特徴検出装置100は、ピッチG及び位相差Rを座標軸とする直交GR座標系への投票数に基づいて、中心画素群が形成する反復的特徴を検出するので、中心画素が形成する反復的特徴に欠落部分が存在する場合であっても、その反復的特徴を確実に検出することができる、
また、特異部分分布特徴検出装置100は、ピッチG及び位相差Rを座標軸とする直交GR座標系への投票数に基づいて、中心画素群が形成する反復的特徴を検出するので、ピッチが同じで位相差が異なる複数の反復的特徴が重なり合って存在するような場合であっても、それら複数の反復的特徴を個別に検出することができる。
【0094】
また、特異部分分布特徴検出装置100は、必要に応じて、直交GR座標系の分解能を変化させて計数結果の解析を実行するので、二つの中心画素の座標の間のピッチを測る際の測長誤差を顕在化させずに吸収しながら、中心画素が形成する反復的特徴を検出することができる。
【0095】
また、特異部分分布特徴検出装置100は、検出すべき反復特性(例えば、ピッチGである。)を予め指定することにより、解析の対象となる直交GR座標系上の座標群を、直交GR座標系上の特定の座標群に限定することができ、演算負荷を更に低減させながら、処理対象画像にある中心画素の反復的特徴、ひいては、製品の表面にある特異部分の分布に関する特徴を効率的に検出することができる。
【0096】
また、特異部分分布特徴検出装置100は、解析の対象となる直交GR座標系上の座標群を、特定の座標群から、それらに隣接する座標群を含めた座標群に拡張することができ、処理対象画像にある中心画素の反復的特徴、ひいては、製品の表面にある特異部分の分布に関する特徴をより柔軟に検出することができる。
【0097】
また、特異部分分布特徴検出装置100は、上述のようにして検出した製品の表面にある特異部分の分布に関する特徴に基づいて、その特異部分の発生原因を早期に特定することができるので(例えば、円周長さが異なる複数の搬送ローラのうちの何れの搬送ローラが原因であるかを早期に特定することができる。)、製品の歩留まりを上げることができ、また、不良品の製造を最低限に抑えることができる。
【0098】
また、特異部分分布特徴検出装置100は、上述のようにして検出した製品の表面にある特異部分の分布に関する特徴に基づいて、製品の表面にある模様が意図した通りに形成されたか否かを判定することができる。
【0099】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなしに上述した実施例に種々の変形及び置換を加えることができる。
【0100】
例えば、上述の実施例において、特異部分分布特徴検出装置100は、処理対象画像の全部を対象として、製品長さ方向にほぼ直線状に周期的に現れる中心画素群が形成する反復的特徴を検出するが、ハフ変換アルゴリズム等の直線抽出アルゴリズムを用いて直線状の特徴を検出した上で、処理対象画像のうちその直線状の特徴が存在する部分のみを対象として、その検出された直線状の特徴に含まれる反復的特徴を検出するようにしてもよい。
【0101】
これにより、特異部分分布特徴検出装置100は、製品長さ方向に平行な直線状の特徴が存在しない処理対象画像上の部分にある中心画素群を、ピッチ及び位相差の導出の対象から除外することによって、処理対象画像にある中心画素の反復的特徴、ひいては、製品の表面にある特異部分の分布に関する特徴をより効率的に検出することができる。
【0102】
また、特異部分分布特徴検出装置100は、ピッチ及び位相差の導出の対象を処理対象画像上の一部の帯状領域(製品幅方向に一定の幅を有し製品長さ方向に延びる領域である。)に限定することによって、同じピッチを有するものの製品幅方向に離れて独立して存在する二つの中心画素の複数の組み合わせが、同じ反復的特徴を形成するものとして誤って投票されるのを防止することができる。
【符号の説明】
【0103】
1 制御部
2 画像取得部
3 出力部
10 処理対象画像生成部
11 特異画素座標取得部
12 反復特性導出部
13 座標系変換部
14 反復的特徴検出部
100 特異部分分布特徴検出装置
【特許請求の範囲】
【請求項1】
製品の表面にある特異部分の分布に関する特徴を検出する特異部分分布特徴検出装置であって、
前記製品の表面を撮影して表面画像を取得する画像取得部と、
前記表面画像から製品の表面にある特異部分を表す複数の特異画素を含む処理対象画像を生成する処理対象画像生成部と、
前記処理対象画像上に直交XY座標系を設定し、該直交XY座標系における前記特異画素の座標を取得する特異画素座標取得部と、
前記複数の特異画素の座標のうちの二つの座標の間隔と所定の基準点から該二つの座標のうちの一つまでの間隔を該二つの座標の間隔で除したときの余りとの組み合わせを反復特性として導き出す反復特性導出部と、
前記間隔と前記余りとを座標軸とする直交パラメータ座標系を用いて、前記反復特性導出部が導き出す組み合わせの、該直交パラメータ座標系上の一座標への変換を実行し、該直交パラメータ座標系上の各座標への変換の回数を該直交パラメータ座標系上の座標毎に計数して計数結果を出力する座標系変換部と、
前記座標系変換部による計数結果の解析に基づいて前記複数の特異画素が形成する反復的特徴を検出する反復的特徴検出部と、
を備えることを特徴とする特異部分分布特徴検出装置。
【請求項2】
前記反復的特徴検出部は、前記直交パラメータ座標系の一座標における計数結果が閾値を超える場合に、該一座標に対応する前記直交XY座標系における前記複数の特異画素が表す反復的特徴を、前記製品の表面にある特異部分が形成する反復的特徴として検出する、
ことを特徴とする請求項1に記載の特異部分分布特徴検出装置。
【請求項3】
前記座標系変換部は、前記反復特性導出部が導き出す前記間隔と前記余りとの組み合わせを、第一の分解能を有する第一の直交パラメータ座標系上の一座標へ変換して第一の計数結果を出力し、
前記反復的特徴検出部は、前記第一の計数結果の解析に基づいて前記複数の特異画素が形成する第一の反復的特徴を検出し、
前記座標系変換部は、前記第一の反復的特徴を形成する複数の特異画素の座標のうちの二つの座標の前記間隔と前記余りとの組み合わせを、前記第一の分解能より細かい第二の分解能を有する第二の直交パラメータ座標系上の一座標へ変換して第二の計数結果を出力し、
前記反復的特徴検出部は、前記第二の計数結果の解析に基づいて前記第一の反復的特徴を形成する複数の特異画素が形成する第二の反復的特徴を検出する、
ことを特徴とする請求項1又は2に記載の特異部分分布特徴検出装置。
【請求項4】
製品の表面にある特異部分の分布に関する特徴を検出する特異部分分布特徴検出方法であって、
前記製品の表面を撮影して表面画像を取得する画像取得ステップと、
前記表面画像から製品の表面にある特異部分を表す複数の特異画素を含む処理対象画像を生成する処理対象画像生成ステップと、
前記処理対象画像上に直交XY座標系を設定し、該直交XY座標系における前記特異画素の座標を取得する特異画素座標取得ステップと、
前記複数の特異画素の座標のうちの二つの座標の間隔と所定の基準点から該二つの座標のうちの一つまでの間隔を該二つの座標の間隔で除したときの余りとの組み合わせを反復特性として導き出す反復特性導出ステップと、
前記間隔と前記余りとを座標軸とする直交パラメータ座標系を用いて、前記反復特性導出ステップにおいて導き出される組み合わせの、該直交パラメータ座標系上の一座標への変換を実行し、該直交パラメータ座標系上の各座標への変換の回数を該直交パラメータ座標系上の座標毎に計数して計数結果を出力する座標系変換ステップと、
前記座標系変換ステップにおける計数結果の解析に基づいて前記複数の特異画素が形成する反復的特徴を検出する反復的特徴検出ステップと、
を備えることを特徴とする特異部分分布特徴検出方法。
【請求項1】
製品の表面にある特異部分の分布に関する特徴を検出する特異部分分布特徴検出装置であって、
前記製品の表面を撮影して表面画像を取得する画像取得部と、
前記表面画像から製品の表面にある特異部分を表す複数の特異画素を含む処理対象画像を生成する処理対象画像生成部と、
前記処理対象画像上に直交XY座標系を設定し、該直交XY座標系における前記特異画素の座標を取得する特異画素座標取得部と、
前記複数の特異画素の座標のうちの二つの座標の間隔と所定の基準点から該二つの座標のうちの一つまでの間隔を該二つの座標の間隔で除したときの余りとの組み合わせを反復特性として導き出す反復特性導出部と、
前記間隔と前記余りとを座標軸とする直交パラメータ座標系を用いて、前記反復特性導出部が導き出す組み合わせの、該直交パラメータ座標系上の一座標への変換を実行し、該直交パラメータ座標系上の各座標への変換の回数を該直交パラメータ座標系上の座標毎に計数して計数結果を出力する座標系変換部と、
前記座標系変換部による計数結果の解析に基づいて前記複数の特異画素が形成する反復的特徴を検出する反復的特徴検出部と、
を備えることを特徴とする特異部分分布特徴検出装置。
【請求項2】
前記反復的特徴検出部は、前記直交パラメータ座標系の一座標における計数結果が閾値を超える場合に、該一座標に対応する前記直交XY座標系における前記複数の特異画素が表す反復的特徴を、前記製品の表面にある特異部分が形成する反復的特徴として検出する、
ことを特徴とする請求項1に記載の特異部分分布特徴検出装置。
【請求項3】
前記座標系変換部は、前記反復特性導出部が導き出す前記間隔と前記余りとの組み合わせを、第一の分解能を有する第一の直交パラメータ座標系上の一座標へ変換して第一の計数結果を出力し、
前記反復的特徴検出部は、前記第一の計数結果の解析に基づいて前記複数の特異画素が形成する第一の反復的特徴を検出し、
前記座標系変換部は、前記第一の反復的特徴を形成する複数の特異画素の座標のうちの二つの座標の前記間隔と前記余りとの組み合わせを、前記第一の分解能より細かい第二の分解能を有する第二の直交パラメータ座標系上の一座標へ変換して第二の計数結果を出力し、
前記反復的特徴検出部は、前記第二の計数結果の解析に基づいて前記第一の反復的特徴を形成する複数の特異画素が形成する第二の反復的特徴を検出する、
ことを特徴とする請求項1又は2に記載の特異部分分布特徴検出装置。
【請求項4】
製品の表面にある特異部分の分布に関する特徴を検出する特異部分分布特徴検出方法であって、
前記製品の表面を撮影して表面画像を取得する画像取得ステップと、
前記表面画像から製品の表面にある特異部分を表す複数の特異画素を含む処理対象画像を生成する処理対象画像生成ステップと、
前記処理対象画像上に直交XY座標系を設定し、該直交XY座標系における前記特異画素の座標を取得する特異画素座標取得ステップと、
前記複数の特異画素の座標のうちの二つの座標の間隔と所定の基準点から該二つの座標のうちの一つまでの間隔を該二つの座標の間隔で除したときの余りとの組み合わせを反復特性として導き出す反復特性導出ステップと、
前記間隔と前記余りとを座標軸とする直交パラメータ座標系を用いて、前記反復特性導出ステップにおいて導き出される組み合わせの、該直交パラメータ座標系上の一座標への変換を実行し、該直交パラメータ座標系上の各座標への変換の回数を該直交パラメータ座標系上の座標毎に計数して計数結果を出力する座標系変換ステップと、
前記座標系変換ステップにおける計数結果の解析に基づいて前記複数の特異画素が形成する反復的特徴を検出する反復的特徴検出ステップと、
を備えることを特徴とする特異部分分布特徴検出方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−117797(P2011−117797A)
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願番号】特願2009−274528(P2009−274528)
【出願日】平成21年12月2日(2009.12.2)
【出願人】(000183303)住友金属鉱山株式会社 (2,015)
【Fターム(参考)】
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願日】平成21年12月2日(2009.12.2)
【出願人】(000183303)住友金属鉱山株式会社 (2,015)
【Fターム(参考)】
[ Back to top ]