
牽伸システムを有する練篠フレーム、カード機、コーミング機械などの紡績用前処理機上のデバイス
【課題】比較的に少ない個数の駆動構成要素で対処すると共に、効率を改善する。
【解決手段】牽伸ローラ対を構成する牽伸システム・ローラにより少なくとも一本の繊維スライバを牽伸する牽伸システムを有する練篠フレーム、カード機、コーミング機械などの紡績用前処理機上のデバイスであって、記牽伸システム・ローラを駆動する動力伝達手段を有すると共に駆動モータを有するというデバイスにおいて、上記牽伸システム・ローラの駆動は異なる側から行われる。比較的に少ない個数の駆動構成要素で対処すると共に、効率の相当な改善を行うために、上記駆動モータは2個の回転駆動要素を有し、少なくとも一組のローラ対の駆動は第1駆動要素により一側から行われ、且つ、少なくとも一組の他のローラ対の駆動は第2駆動要素により他側から行われる。
【解決手段】牽伸ローラ対を構成する牽伸システム・ローラにより少なくとも一本の繊維スライバを牽伸する牽伸システムを有する練篠フレーム、カード機、コーミング機械などの紡績用前処理機上のデバイスであって、記牽伸システム・ローラを駆動する動力伝達手段を有すると共に駆動モータを有するというデバイスにおいて、上記牽伸システム・ローラの駆動は異なる側から行われる。比較的に少ない個数の駆動構成要素で対処すると共に、効率の相当な改善を行うために、上記駆動モータは2個の回転駆動要素を有し、少なくとも一組のローラ対の駆動は第1駆動要素により一側から行われ、且つ、少なくとも一組の他のローラ対の駆動は第2駆動要素により他側から行われる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、牽伸ローラ対を構成する牽伸システム・ローラにより少なくとも一本の繊維スライバを牽伸する牽伸システムを有する練篠フレーム、カード機、コーミング機械などの紡績用前処理機上のデバイスであって、上記牽伸システム・ローラを駆動する動力伝達手段を有すると共に駆動モータを有し、上記牽伸システム・ローラの駆動は異なる側から行われるというデバイスに関する。
【背景技術】
【0002】
公知のデバイス(WO91/05893A)において、モータ1により駆動される駆動プーリ2は、平坦ベルト20と駆動プーリ3とにより主要駆動シャフト40に接続される。牽伸システム・ローラ30、31、32に対する回転は、駆動プーリ4および10により主要駆動シャフト40から導かれる。駆動プーリ4は駆動目的で、ベルト22と駆動プーリ5とにより中間駆動シャフト41に接続される。牽伸システム・ローラ30は、ベルト23により接続された駆動プーリ6および7を経由して中間駆動シャフト41により駆動される。異なる直径を有する駆動プーリ4、5、6および7の配置構成に依れば、牽伸されるべき繊維スライバと該繊維スライバに適用されるべき牽伸とに応じて、適切な回転運動が牽伸システム・ローラ30に適用されるべきである。繊維スライバの予備牽伸を行う牽伸システム・ローラ30、31は、駆動目的で平坦ベルト24により接続される。駆動プーリ8および9に対して適切な直径を選択することにより、繊維スライバの予備牽伸の程度を決定するという、牽伸システム・ローラ30、31の相互に対する回転速度比を達成することが可能である。牽伸システム・ローラ32の回転運動は、駆動プーリ10により主要駆動シャフト40から、且つ、駆動プーリ12により平坦ベルト21から得られる。牽伸システム・ローラ32は、繊維スライバの主要牽伸を行う。上記伝動機構レイアウトは、装置に関して不経済である。上記駆動手段は幾つかの分岐部を有すると共に、多数の駆動要素を有している。特定の問題は、数段の変速段階が必要であり、このことは伝動装置損失(gear losses)に帰着することから駆動手段の効率を更に低減するということになる。
【発明の開示】
【発明が解決しようとする課題】
【0003】
故に本発明の基礎となる課題は、冒頭において記述された種類のデバイスであって、言及された不都合を回避し、特に、比較的に少ない個数の駆動構成要素で対処すると共に、その効率が概ね改善されるというデバイスを提供するに在る。
【課題を解決するための手段】
【0004】
該課題は、請求項1の特徴部分の特徴により解決される。
すなわち1番目の発明によれば、牽伸ローラ対を構成する牽伸システム・ローラにより少なくとも一本の繊維スライバを牽伸する牽伸システムを有する練篠フレーム、カード機、コーミング機械などの紡績用前処理機上のデバイスであって、上記牽伸システム・ローラを駆動する動力伝達手段を有すると共に駆動モータを有し、上記牽伸システム・ローラの駆動は異なる側から行われるというデバイスにおいて、上記駆動モータ(1)は2個の回転駆動要素(2a、2b)を有し、少なくとも一組のローラ対(60/III;59/II)の駆動は第1駆動要素(5;2a、3)により一側から行われ、且つ、少なくとも一組の他のローラ対(57、58/I)の駆動は第2駆動要素(6;2b、4)により他側から行われることを特徴とする、デバイスが提供される。
【0005】
本発明に依れば、牽伸システム・ローラの駆動手段の要素は必要な個数まで実用的に減少されることから、相当な経済的利点が得られる。各駆動要素は分岐部が殆ど無いように相互に対して配置されることから、機械的損失が回避される。モータの駆動力は牽伸システム・ローラに対して直接的にまたは唯一の伝動装置を介して導かれることから、特定の利点が得られる。結果として、高い回転速度における高いパフォーマンスを達成することで、駆動手段の効率を相当に改善できる。
【0006】
請求項2乃至30は、本発明の好適な発展例を包含する。
2番目の発明によれば、1番目の発明において、前記駆動要素は、前記駆動モータの外方突出シャフト両端部である。
3番目の発明によれば、1番目または2番目の発明において、前記シャフト両端部には駆動プーリが夫々取付けられる。
4番目の発明によれば、1番目から3番目のいずれかの発明において、前記駆動要素は前記駆動モータの回転外壁面である。
5番目の発明によれば、1番目から4番目のいずれかの発明において、少なくとも、ひとつの駆動列においては伝動装置が在る。
6番目の発明によれば、1番目から5番目のいずれかの発明において、前記伝動装置は前記駆動モータと少なくとも一対の被動ローラとの間に配置される。
7番目の発明によれば、1番目から6番目のいずれかの発明において、機械的伝動装置が存在する。
8番目の発明によれば、1番目から7番目のいずれかの発明において、前記伝動装置はひとつの変速段を有する。
9番目の発明によれば、1番目から8番目のいずれかの発明において、前記伝動装置は前記駆動モータにより駆動される。
10番目の発明によれば、1番目から9番目のいずれかの発明において、前記牽伸ローラおよび/または前記伝動装置の駆動はベルトを経由して行われる。
11番目の発明によれば、1番目から10番目のいずれかの発明において、前記ベルトは平坦ベルトである。
12番目の発明によれば、1番目から11番目のいずれかの発明において、前記ベルトは歯付きベルトである。
13番目の発明によれば、1番目から12番目のいずれかの発明において、前記ベルトはベルト張設プーリと組み合わされる。
14番目の発明によれば、1番目から13番目のいずれかの発明において、機械要素、特に牽伸システム・ローラを駆動する複数個の駆動プーリが在る。
15番目の発明によれば、1番目から14番目のいずれかの発明において、各々が少なくとも2個の駆動プーリの回りを通る少なくとも一個の伝動要素、特にベルトが在る。
16番目の発明によれば、1番目から15番目のいずれかの発明において、前記駆動プーリの内の少なくとも幾つかの駆動プーリは異なる直径を有する。
17番目の発明によれば、1番目から16番目のいずれかの発明において、前記牽伸システムの出力ローラ対の駆動は前記第1駆動要素により行われる。
18番目の発明によれば、1番目から17番目のいずれかの発明において、前記牽伸システムの入力ローラ対および中央ローラ対の駆動は前記第2駆動要素により行われる。
19番目の発明によれば、1番目から18番目のいずれかの発明において、前記第1駆動要素の駆動用駆動プーリは、前記出力ローラ対の被動用駆動プーリよりも大きな直径を有する。
20番目の発明によれば、1番目から19番目のいずれかの発明において、前記第2駆動要素の駆動用駆動プーリは前記伝動装置の入力部における被動用駆動プーリよりも小さな直径を有する。
21番目の発明によれば、1番目から20番目のいずれかの発明において、前記伝動装置の出力部における駆動用駆動プーリは、前記入力ローラ対および中央ローラ対のための被動用駆動プーリよりも小さな直径を有する。
22番目の発明によれば、1番目から21番目のいずれかの発明において、前記第2駆動要素の前記駆動用駆動プーリおよび前記伝動装置の入力部における前記被動用駆動プーリは、段状プーリとして構成される。
23番目の発明によれば、1番目から22番目のいずれかの発明において、予備牽伸ローラ対および主要牽伸ローラ対を構成する牽伸システム・ローラが存在する。
24番目の発明によれば、1番目から23番目のいずれかの発明において、前記第1駆動要素からはカレンダ・ローラの駆動が導かれる。
25番目の発明によれば、1番目から24番目のいずれかの発明において、前記第1駆動要素からは回転プレートの駆動が導かれる。
26番目の発明によれば、1番目から25番目のいずれかの発明において、出力部においては1個の下側ローラが2個の上側ローラと協働する。
27番目の発明によれば、1番目から26番目のいずれかの発明において、前記入力ローラ対は一側における被動用駆動プーリおよび他側における駆動用駆動プーリを有しており、上記駆動用駆動プーリは前記中央ローラ対を駆動するために使用される。
28番目の発明によれば、1番目から27番目のいずれかの発明において、前記中央ローラ対は一側における被動用駆動プーリと他側における駆動用駆動プーリとを有しており、上記駆動用駆動プーリは前記入力ローラ対を駆動するために使用される。
29番目の発明によれば、1番目から28番目のいずれかの発明において、前記入力ローラ対および中央ローラ対を駆動するベルトは、少なくとも一個の案内プーリと組み合わされる。
30番目の発明によれば、1番目から29番目のいずれかの発明において、前記入力ローラ対および中央ローラ対を駆動するベルトは、少なくとも一個の張設プーリと組み合わされる。
【発明を実施するための最良の形態】
【0007】
本発明は以下において、図中に示された好適実施例に関して相当に詳細に記述される。
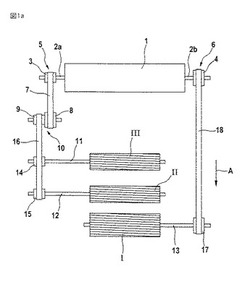
図1a乃至図1cに依れば、たとえばTruetzschler TD 02などの練篠フレームの牽伸システムの伝動機構レイアウトは、電気駆動モータ1と牽伸システム下側ローラI、II、IIIとの間の接続関係を示している。特に、牽伸システム下側ローラI、II、IIIは歯付きベルトにより駆動される。牽伸システム上側ローラ(図5を参照)の回転は、上記下側ローラに対する上側ローラの接触圧力の結果として行われる。
【0008】
モータ1は2つの端面を越えて突出する回転駆動シャフトを有し、該シャフトは2つのシャフト・ジャーナル2a、2b(シャフト端部)を形成する。ジャーナル2aおよび2b上には、該ジャーナルと一体的に回転すべく駆動用駆動プーリ3および4が夫々取付けられる。シャフト・ジャーナル2aおよび駆動プーリ3は第1駆動要素5を形成すると共に、シャフト・ジャーナル2bおよび駆動プーリ4は第2駆動要素6を形成する。
【0009】
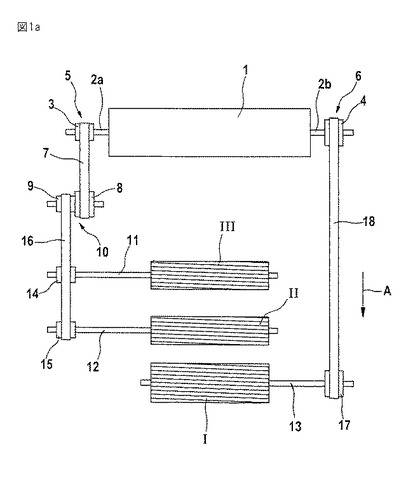
モータ1により駆動される駆動プーリ3は無限循環歯付きベルト7により、伝動装置10の被動用駆動プーリ8に接続される。これに加えて伝動装置10は、被動用駆動プーリ8と同軸的に配置された駆動用駆動プーリ9を有する。下側ローラIIIおよびIIのジャーナル11および12(すなわち駆動シャフト)上には、該ジャーナルと一体的に回転すべく被動用駆動プーリ14および15が夫々取付けられる。伝動装置10の駆動用駆動プーリ9は被動用駆動プーリ14および15に対し、それらの回りを通る無限循環歯付きベルト16によって接続される。参照符号Aは動作方向を表す。
【0010】
以下の内容が好適であることが判明した:シャフト・ジャーナル2a、2bの回転速度はたとえば3000回転/分、駆動プーリ3の直径は65〜75mm、駆動プーリ8の直径は115〜125mm、駆動プーリ9の直径は40〜50mm、駆動プーリ8および9の回転速度は1500〜2000回転/分、駆動プーリ14の直径は40〜50mmで回転速度は1500〜2000回転/分、駆動プーリ15の直径は25〜35mmで回転速度は2400〜2600回転/分。
【0011】
その様にして、入力ローラ対および中央ローラ対(図5参照)の駆動は第1駆動要素5によりモータ1の一側から行われる。
【0012】
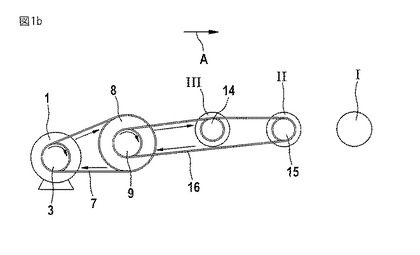
下側ローラIのジャーナル13(すなわち駆動シャフト)上には、該ジャーナルと一体的に回転すべく被動用駆動プーリ17が取付けられる。モータ1により駆動される駆動プーリ4は、該駆動プーリと被動用駆動プーリ17との回りを通る無限循環歯付きベルト18によりプーリ17に接続される。
【0013】
以下の内容が好適であることが判明した:駆動プーリ4の直径は130〜150mm、駆動プーリ17の直径は40〜50mm、駆動プーリ17の回転速度は9000〜9600回転/分。
【0014】
その様にして、上記出力ローラ(図5参照)の駆動は、第2駆動要素6によりモータ1の他側から行われる。
【0015】
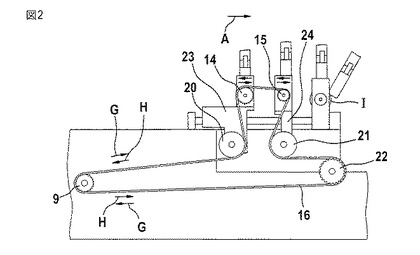
図2に依れば、材料の流れ方向Aの逆方向で見て、下側ローラIIおよびIIIは、歯付きベルト用プーリ14、15および歯付きベルト16の形態をなす共通包囲駆動手段により左側から駆動される。下側ローラIIおよびIIIの異なる回転速度は、駆動ジャーナル11、12において異なる歯数を有する変更ホィールにより実施される。作動中に、すなわち繊維スライバが方向Aに進行するとき、歯付きベルト16は方向Gに移動する。歯付きベルト16は、歯付きベルト用プーリ9から始まり、円滑案内プーリ20、歯付きベルト用プーリ14(下側ローラIIIのローラ駆動プーリ)、歯付きベルト用プーリ15(下側ローラIIのローラ駆動プーリ)、円滑案内プーリ21、および、歯付きベルト用プーリ22上を順次通過する。歯付きベルト16はその歯部により、歯付きベルト用プーリ14、15、22および9と相互係合する。歯付きベルト16の平面側(後側)、すなわち歯部形成側の逆側は、円滑案内プーリ20、21と接触または係合する。歯付きベルト16は、全てのプーリの回りを通過する。(牽伸の間において繊維スライバが方向Aに進行する)作動中に、歯付きベルト用プーリ14、15、22、9は時計方向に回転し、且つ、案内プーリ20、21は反時計方向に回転する。入力ローラ対および中央ローラ対の間のニップライン間隔が変更(増大もしくは減少)される場合には、キャリッジ23および/または24が変位され得る。
【0016】
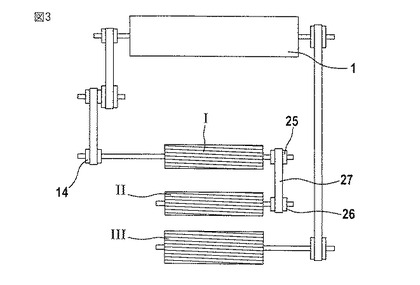
図3は図1aと同様の構成を示しており、入力下側ローラIに関して被動用駆動プーリ14は一側に取付けられ且つ駆動用駆動プーリ25は他側に取付けられる。他側にては同様に、中央下側ローラIIが被動用駆動プーリ26に組み合わされる。駆動プーリ25は、歯付きベルト27により駆動プーリ26に接続される。結果として、上記入力下側ローラおよび中央下側ローラの駆動は異なる側から行われる。
【0017】
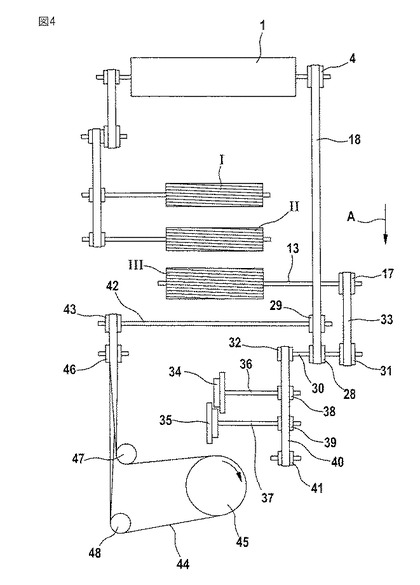
図4は図1aと同様の実施例を示しており、駆動用駆動プーリ4は被動用駆動プーリ28および被動用駆動プーリ29を駆動する。駆動プーリ28は駆動シャフト30上に取付けられ、該シャフト上には、駆動用駆動プーリ31および駆動用駆動プーリ32が同軸的に配置される。駆動用駆動プーリ31は下側ローラIIIに対する被動用駆動プーリ17に歯付きベルト33により接続される。
【0018】
吐出ローラ34および35は夫々、シャフト36および37により被動用駆動プーリ38および39に対して同軸的に接続される。歯付きベルト40は、駆動プーリ32、38、39および更なる駆動プーリ41の回りを通る。
【0019】
駆動プーリ29は、シャフト42により駆動プーリ43に対して同軸的に接続される。駆動プーリ43は、牽伸された繊維スライバに対する巻取器プレート45を歯付きベルト44により駆動し、歯付きベルト44は2つの案内プーリ47、48を経由して張設プーリ46と係合している。
【0020】
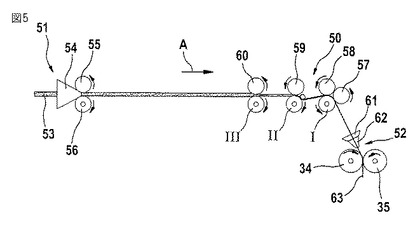
図5に依ると、牽伸システム50の上流には、牽伸システム取入口51が配置され、牽伸システム50の下流には牽伸システム吐出口52が配置される。(不図示の)ケンスから到来する繊維スライバ又はケンス無し繊維スライバ・パッケージから到来する繊維スライバ53は、スライバ案内手段54に入ると共に、吐出ローラ55、56により引出され、方向Aに更に搬送される。牽伸システム52はフォー・オーバー・スリー牽伸システムとして構成され、すなわち該システム、3個の下側ローラI、II、III(Iは出力下側ローラ、IIは中央下側ローラ、IIIは入力下側ローラ)と、4個の上側ローラ57、58、59、60とから成る。たとえば、出力下側ローラIに対しては40mm、中央下側ローラIIに対しては35mm、および、入力下側ローラIIIに対しては35mmの直径が選択され得る。下側ローラI、IIおよびIIIは、渦巻き状縦溝を有する。牽伸システム50においては、複数本の繊維スライバ53から成る繊維束の牽伸が実施される。牽伸操作は、予備牽伸操作および主要牽伸操作から構成される。ローラ対60/IIIおよび59/IIは予備牽伸領域を形成し、且つ、ローラ対59/IIおよび58、57/Iは主要牽伸領域を形成する。牽伸された繊維スライバは、牽伸システム吐出口52において、ウェブ案内手段61内へと通過すると共に、吐出ローラ34、35によりスライバ・ファネル62を通して引出され、其処で繊維スライバは組み合わされることで繊維スライバ63を形成し、該スライバは次に(不図示の)ケンス内に投入され又はケンス無し繊維スライバ・パッケージの形態である。参照符号Aは動作方向を表す。繊維スライバ63の出口速度は1200m/分以上である。上記各ローラの回転方向は湾曲矢印により表される。
【0021】
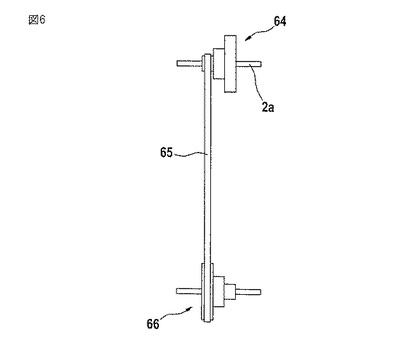
図6に依ると、段状プーリ64がシャフト・ジャーナル2aに取付けられる。段状プーリ64の回転は、駆動プーリ9(図1a参照)と一体的に回転すべく該駆動プーリ上に取付けられた段状プーリ66に対して平坦ベルト65により伝達される。平坦ベルト65の再配置により、異なる速度伝達比を形成する。
【0022】
図1aに係る配置構成においても、与えられた直径を有する駆動プーリ3および/または8を、一例として、異なる直径もしくは異なる歯数を有する駆動プーリ3および/または8に置き換えることで、異なる速度伝達比が実施され得る。
【0023】
伝動装置2aは、牽伸変更用の伝動装置(gear)である。駆動プーリ3、8、9、14および/または15を変更することにより、牽伸システム・ローラIIおよびIIIの回転速度の変更が実施され得る。
【0024】
少なくとも一組の第1ローラ対60/IIIおよび/または59/IIの駆動は第1駆動要素5;2a、3により一側から行われ、且つ、少なくとも一組の更なるローラ対57、58/Iの駆動は第2駆動要素6;2b、4により他側から行われるという牽伸システム50の例を用いて、本発明は説明されてきた。本発明は同一様式にて、少なくとも一組の更なるローラ対57、58/Iの駆動は第1駆動要素5;2a、3により一側から行われ、且つ、少なくとも一組のローラ対60/IIIおよび/または59/IIの駆動は第2駆動要素6;2b、4により他側から行われるという牽伸システム52を包含する。このことは、カレンダ・ローラ34、35および巻取器プレート45の駆動に対しても当てはまる。
【0025】
牽伸システム50は、たとえば練篠フレームの場合には複数本の繊維スライバ53を牽伸し得る。牽伸システム50はまた、たとえばカード機(一体的練篠フレーム)の吐出口において、1本のみの繊維スライバも牽伸し得る。
【0026】
本発明に係る上記デバイスに対する練篠フレームは、破断フレームとも称される。該フレームは実際問題として、概略的には均一化(levelling)を行わない予備練篠フレームとして使用される。特に均一化を行わない予備練篠フレームの場合、牽伸に関する比較的に高度の可変性は使用者に必要とはされず、要求事項を遙かに越えるものである。この点において使用者は、自身の紡績計画に従い概略的に、変更されることが極めて希であるという固定的なダブリングおよび牽伸を行い、斯かる一切の変更は専ら固定量だけ行われる。本発明に係る上記デバイスは、牽伸に対応する主要変速機を有する伝動装置構成を有している。本発明は、主要牽伸変速機として、駆動手段および切換え点により最適な伝動機構の解決策を提供する。モータ制御手段に対する牽伸の機械的な伝動装置結合の結果として、装置に関する要件は概ね少なくされ得る。伝動装置全体がひとつのモータ1により駆動される。牽伸は、伝動装置10における主要変速段階により機械的に固定されている。
【0027】
本発明に係る上記デバイスに依れば変速器は、それほど厳密さを必要とせずに自由に駆動制御され得る。これにより、機械的なモータ構成において、モータ1の両側が駆動手段を備えると共に伝動装置10は空間を最適に使用する極めて単純な形態を獲得するという成果が得られる。斯かる構成は特に、2つの駆動側を結合する少なくとも一本の中間シャフトを節約する。これに加え、全体的なベルト案内およびベルト張設が極めて簡素化されている。
【図面の簡単な説明】
【0028】
【図1a】本発明に係る駆動手段を有する練篠フレームの伝動機構レイアウトの概略的平面図である。
【図1b】図1aに係る上記駆動手段の側面図である。
【図1c】図1aに係る上記駆動手段の側面図である。
【図2】2つの案内プーリを備えた入力下側ローラおよび中央下側ローラの駆動手段および変位可能軸受を示す図である。
【図3】図1aと同様であるが、入力下側ローラの駆動および中央下側ローラの駆動が異なる側から行われる構成を示す図である。
【図4】図1aと同様であるが、出力下側ローラおよび吐出ローラに対する共通駆動手段と巻取器プレートに対する駆動手段とを備えた伝動機構レイアウトを示す図である。
【図5】4個の上側ローラと3個の下側ローラとを有するフォー・オーバー・スリー牽伸システムの概略的側面図である。
【図6】いずれもが円錐状プーリとして構成された、第2駆動要素の駆動用駆動プーリと伝動装置の入力部における被動用駆動プーリとを示す図である。
【符号の説明】
【0029】
1 駆動モータ
2a、2b シャフト・ジャーナル(回転駆動要素)
3、4 駆動用駆動プーリ
5 第1駆動要素
6 第2駆動要素
57、58、59、60 上側ローラ
I、II、III 下側ローラ
【技術分野】
【0001】
本発明は、牽伸ローラ対を構成する牽伸システム・ローラにより少なくとも一本の繊維スライバを牽伸する牽伸システムを有する練篠フレーム、カード機、コーミング機械などの紡績用前処理機上のデバイスであって、上記牽伸システム・ローラを駆動する動力伝達手段を有すると共に駆動モータを有し、上記牽伸システム・ローラの駆動は異なる側から行われるというデバイスに関する。
【背景技術】
【0002】
公知のデバイス(WO91/05893A)において、モータ1により駆動される駆動プーリ2は、平坦ベルト20と駆動プーリ3とにより主要駆動シャフト40に接続される。牽伸システム・ローラ30、31、32に対する回転は、駆動プーリ4および10により主要駆動シャフト40から導かれる。駆動プーリ4は駆動目的で、ベルト22と駆動プーリ5とにより中間駆動シャフト41に接続される。牽伸システム・ローラ30は、ベルト23により接続された駆動プーリ6および7を経由して中間駆動シャフト41により駆動される。異なる直径を有する駆動プーリ4、5、6および7の配置構成に依れば、牽伸されるべき繊維スライバと該繊維スライバに適用されるべき牽伸とに応じて、適切な回転運動が牽伸システム・ローラ30に適用されるべきである。繊維スライバの予備牽伸を行う牽伸システム・ローラ30、31は、駆動目的で平坦ベルト24により接続される。駆動プーリ8および9に対して適切な直径を選択することにより、繊維スライバの予備牽伸の程度を決定するという、牽伸システム・ローラ30、31の相互に対する回転速度比を達成することが可能である。牽伸システム・ローラ32の回転運動は、駆動プーリ10により主要駆動シャフト40から、且つ、駆動プーリ12により平坦ベルト21から得られる。牽伸システム・ローラ32は、繊維スライバの主要牽伸を行う。上記伝動機構レイアウトは、装置に関して不経済である。上記駆動手段は幾つかの分岐部を有すると共に、多数の駆動要素を有している。特定の問題は、数段の変速段階が必要であり、このことは伝動装置損失(gear losses)に帰着することから駆動手段の効率を更に低減するということになる。
【発明の開示】
【発明が解決しようとする課題】
【0003】
故に本発明の基礎となる課題は、冒頭において記述された種類のデバイスであって、言及された不都合を回避し、特に、比較的に少ない個数の駆動構成要素で対処すると共に、その効率が概ね改善されるというデバイスを提供するに在る。
【課題を解決するための手段】
【0004】
該課題は、請求項1の特徴部分の特徴により解決される。
すなわち1番目の発明によれば、牽伸ローラ対を構成する牽伸システム・ローラにより少なくとも一本の繊維スライバを牽伸する牽伸システムを有する練篠フレーム、カード機、コーミング機械などの紡績用前処理機上のデバイスであって、上記牽伸システム・ローラを駆動する動力伝達手段を有すると共に駆動モータを有し、上記牽伸システム・ローラの駆動は異なる側から行われるというデバイスにおいて、上記駆動モータ(1)は2個の回転駆動要素(2a、2b)を有し、少なくとも一組のローラ対(60/III;59/II)の駆動は第1駆動要素(5;2a、3)により一側から行われ、且つ、少なくとも一組の他のローラ対(57、58/I)の駆動は第2駆動要素(6;2b、4)により他側から行われることを特徴とする、デバイスが提供される。
【0005】
本発明に依れば、牽伸システム・ローラの駆動手段の要素は必要な個数まで実用的に減少されることから、相当な経済的利点が得られる。各駆動要素は分岐部が殆ど無いように相互に対して配置されることから、機械的損失が回避される。モータの駆動力は牽伸システム・ローラに対して直接的にまたは唯一の伝動装置を介して導かれることから、特定の利点が得られる。結果として、高い回転速度における高いパフォーマンスを達成することで、駆動手段の効率を相当に改善できる。
【0006】
請求項2乃至30は、本発明の好適な発展例を包含する。
2番目の発明によれば、1番目の発明において、前記駆動要素は、前記駆動モータの外方突出シャフト両端部である。
3番目の発明によれば、1番目または2番目の発明において、前記シャフト両端部には駆動プーリが夫々取付けられる。
4番目の発明によれば、1番目から3番目のいずれかの発明において、前記駆動要素は前記駆動モータの回転外壁面である。
5番目の発明によれば、1番目から4番目のいずれかの発明において、少なくとも、ひとつの駆動列においては伝動装置が在る。
6番目の発明によれば、1番目から5番目のいずれかの発明において、前記伝動装置は前記駆動モータと少なくとも一対の被動ローラとの間に配置される。
7番目の発明によれば、1番目から6番目のいずれかの発明において、機械的伝動装置が存在する。
8番目の発明によれば、1番目から7番目のいずれかの発明において、前記伝動装置はひとつの変速段を有する。
9番目の発明によれば、1番目から8番目のいずれかの発明において、前記伝動装置は前記駆動モータにより駆動される。
10番目の発明によれば、1番目から9番目のいずれかの発明において、前記牽伸ローラおよび/または前記伝動装置の駆動はベルトを経由して行われる。
11番目の発明によれば、1番目から10番目のいずれかの発明において、前記ベルトは平坦ベルトである。
12番目の発明によれば、1番目から11番目のいずれかの発明において、前記ベルトは歯付きベルトである。
13番目の発明によれば、1番目から12番目のいずれかの発明において、前記ベルトはベルト張設プーリと組み合わされる。
14番目の発明によれば、1番目から13番目のいずれかの発明において、機械要素、特に牽伸システム・ローラを駆動する複数個の駆動プーリが在る。
15番目の発明によれば、1番目から14番目のいずれかの発明において、各々が少なくとも2個の駆動プーリの回りを通る少なくとも一個の伝動要素、特にベルトが在る。
16番目の発明によれば、1番目から15番目のいずれかの発明において、前記駆動プーリの内の少なくとも幾つかの駆動プーリは異なる直径を有する。
17番目の発明によれば、1番目から16番目のいずれかの発明において、前記牽伸システムの出力ローラ対の駆動は前記第1駆動要素により行われる。
18番目の発明によれば、1番目から17番目のいずれかの発明において、前記牽伸システムの入力ローラ対および中央ローラ対の駆動は前記第2駆動要素により行われる。
19番目の発明によれば、1番目から18番目のいずれかの発明において、前記第1駆動要素の駆動用駆動プーリは、前記出力ローラ対の被動用駆動プーリよりも大きな直径を有する。
20番目の発明によれば、1番目から19番目のいずれかの発明において、前記第2駆動要素の駆動用駆動プーリは前記伝動装置の入力部における被動用駆動プーリよりも小さな直径を有する。
21番目の発明によれば、1番目から20番目のいずれかの発明において、前記伝動装置の出力部における駆動用駆動プーリは、前記入力ローラ対および中央ローラ対のための被動用駆動プーリよりも小さな直径を有する。
22番目の発明によれば、1番目から21番目のいずれかの発明において、前記第2駆動要素の前記駆動用駆動プーリおよび前記伝動装置の入力部における前記被動用駆動プーリは、段状プーリとして構成される。
23番目の発明によれば、1番目から22番目のいずれかの発明において、予備牽伸ローラ対および主要牽伸ローラ対を構成する牽伸システム・ローラが存在する。
24番目の発明によれば、1番目から23番目のいずれかの発明において、前記第1駆動要素からはカレンダ・ローラの駆動が導かれる。
25番目の発明によれば、1番目から24番目のいずれかの発明において、前記第1駆動要素からは回転プレートの駆動が導かれる。
26番目の発明によれば、1番目から25番目のいずれかの発明において、出力部においては1個の下側ローラが2個の上側ローラと協働する。
27番目の発明によれば、1番目から26番目のいずれかの発明において、前記入力ローラ対は一側における被動用駆動プーリおよび他側における駆動用駆動プーリを有しており、上記駆動用駆動プーリは前記中央ローラ対を駆動するために使用される。
28番目の発明によれば、1番目から27番目のいずれかの発明において、前記中央ローラ対は一側における被動用駆動プーリと他側における駆動用駆動プーリとを有しており、上記駆動用駆動プーリは前記入力ローラ対を駆動するために使用される。
29番目の発明によれば、1番目から28番目のいずれかの発明において、前記入力ローラ対および中央ローラ対を駆動するベルトは、少なくとも一個の案内プーリと組み合わされる。
30番目の発明によれば、1番目から29番目のいずれかの発明において、前記入力ローラ対および中央ローラ対を駆動するベルトは、少なくとも一個の張設プーリと組み合わされる。
【発明を実施するための最良の形態】
【0007】
本発明は以下において、図中に示された好適実施例に関して相当に詳細に記述される。
図1a乃至図1cに依れば、たとえばTruetzschler TD 02などの練篠フレームの牽伸システムの伝動機構レイアウトは、電気駆動モータ1と牽伸システム下側ローラI、II、IIIとの間の接続関係を示している。特に、牽伸システム下側ローラI、II、IIIは歯付きベルトにより駆動される。牽伸システム上側ローラ(図5を参照)の回転は、上記下側ローラに対する上側ローラの接触圧力の結果として行われる。
【0008】
モータ1は2つの端面を越えて突出する回転駆動シャフトを有し、該シャフトは2つのシャフト・ジャーナル2a、2b(シャフト端部)を形成する。ジャーナル2aおよび2b上には、該ジャーナルと一体的に回転すべく駆動用駆動プーリ3および4が夫々取付けられる。シャフト・ジャーナル2aおよび駆動プーリ3は第1駆動要素5を形成すると共に、シャフト・ジャーナル2bおよび駆動プーリ4は第2駆動要素6を形成する。
【0009】
モータ1により駆動される駆動プーリ3は無限循環歯付きベルト7により、伝動装置10の被動用駆動プーリ8に接続される。これに加えて伝動装置10は、被動用駆動プーリ8と同軸的に配置された駆動用駆動プーリ9を有する。下側ローラIIIおよびIIのジャーナル11および12(すなわち駆動シャフト)上には、該ジャーナルと一体的に回転すべく被動用駆動プーリ14および15が夫々取付けられる。伝動装置10の駆動用駆動プーリ9は被動用駆動プーリ14および15に対し、それらの回りを通る無限循環歯付きベルト16によって接続される。参照符号Aは動作方向を表す。
【0010】
以下の内容が好適であることが判明した:シャフト・ジャーナル2a、2bの回転速度はたとえば3000回転/分、駆動プーリ3の直径は65〜75mm、駆動プーリ8の直径は115〜125mm、駆動プーリ9の直径は40〜50mm、駆動プーリ8および9の回転速度は1500〜2000回転/分、駆動プーリ14の直径は40〜50mmで回転速度は1500〜2000回転/分、駆動プーリ15の直径は25〜35mmで回転速度は2400〜2600回転/分。
【0011】
その様にして、入力ローラ対および中央ローラ対(図5参照)の駆動は第1駆動要素5によりモータ1の一側から行われる。
【0012】
下側ローラIのジャーナル13(すなわち駆動シャフト)上には、該ジャーナルと一体的に回転すべく被動用駆動プーリ17が取付けられる。モータ1により駆動される駆動プーリ4は、該駆動プーリと被動用駆動プーリ17との回りを通る無限循環歯付きベルト18によりプーリ17に接続される。
【0013】
以下の内容が好適であることが判明した:駆動プーリ4の直径は130〜150mm、駆動プーリ17の直径は40〜50mm、駆動プーリ17の回転速度は9000〜9600回転/分。
【0014】
その様にして、上記出力ローラ(図5参照)の駆動は、第2駆動要素6によりモータ1の他側から行われる。
【0015】
図2に依れば、材料の流れ方向Aの逆方向で見て、下側ローラIIおよびIIIは、歯付きベルト用プーリ14、15および歯付きベルト16の形態をなす共通包囲駆動手段により左側から駆動される。下側ローラIIおよびIIIの異なる回転速度は、駆動ジャーナル11、12において異なる歯数を有する変更ホィールにより実施される。作動中に、すなわち繊維スライバが方向Aに進行するとき、歯付きベルト16は方向Gに移動する。歯付きベルト16は、歯付きベルト用プーリ9から始まり、円滑案内プーリ20、歯付きベルト用プーリ14(下側ローラIIIのローラ駆動プーリ)、歯付きベルト用プーリ15(下側ローラIIのローラ駆動プーリ)、円滑案内プーリ21、および、歯付きベルト用プーリ22上を順次通過する。歯付きベルト16はその歯部により、歯付きベルト用プーリ14、15、22および9と相互係合する。歯付きベルト16の平面側(後側)、すなわち歯部形成側の逆側は、円滑案内プーリ20、21と接触または係合する。歯付きベルト16は、全てのプーリの回りを通過する。(牽伸の間において繊維スライバが方向Aに進行する)作動中に、歯付きベルト用プーリ14、15、22、9は時計方向に回転し、且つ、案内プーリ20、21は反時計方向に回転する。入力ローラ対および中央ローラ対の間のニップライン間隔が変更(増大もしくは減少)される場合には、キャリッジ23および/または24が変位され得る。
【0016】
図3は図1aと同様の構成を示しており、入力下側ローラIに関して被動用駆動プーリ14は一側に取付けられ且つ駆動用駆動プーリ25は他側に取付けられる。他側にては同様に、中央下側ローラIIが被動用駆動プーリ26に組み合わされる。駆動プーリ25は、歯付きベルト27により駆動プーリ26に接続される。結果として、上記入力下側ローラおよび中央下側ローラの駆動は異なる側から行われる。
【0017】
図4は図1aと同様の実施例を示しており、駆動用駆動プーリ4は被動用駆動プーリ28および被動用駆動プーリ29を駆動する。駆動プーリ28は駆動シャフト30上に取付けられ、該シャフト上には、駆動用駆動プーリ31および駆動用駆動プーリ32が同軸的に配置される。駆動用駆動プーリ31は下側ローラIIIに対する被動用駆動プーリ17に歯付きベルト33により接続される。
【0018】
吐出ローラ34および35は夫々、シャフト36および37により被動用駆動プーリ38および39に対して同軸的に接続される。歯付きベルト40は、駆動プーリ32、38、39および更なる駆動プーリ41の回りを通る。
【0019】
駆動プーリ29は、シャフト42により駆動プーリ43に対して同軸的に接続される。駆動プーリ43は、牽伸された繊維スライバに対する巻取器プレート45を歯付きベルト44により駆動し、歯付きベルト44は2つの案内プーリ47、48を経由して張設プーリ46と係合している。
【0020】
図5に依ると、牽伸システム50の上流には、牽伸システム取入口51が配置され、牽伸システム50の下流には牽伸システム吐出口52が配置される。(不図示の)ケンスから到来する繊維スライバ又はケンス無し繊維スライバ・パッケージから到来する繊維スライバ53は、スライバ案内手段54に入ると共に、吐出ローラ55、56により引出され、方向Aに更に搬送される。牽伸システム52はフォー・オーバー・スリー牽伸システムとして構成され、すなわち該システム、3個の下側ローラI、II、III(Iは出力下側ローラ、IIは中央下側ローラ、IIIは入力下側ローラ)と、4個の上側ローラ57、58、59、60とから成る。たとえば、出力下側ローラIに対しては40mm、中央下側ローラIIに対しては35mm、および、入力下側ローラIIIに対しては35mmの直径が選択され得る。下側ローラI、IIおよびIIIは、渦巻き状縦溝を有する。牽伸システム50においては、複数本の繊維スライバ53から成る繊維束の牽伸が実施される。牽伸操作は、予備牽伸操作および主要牽伸操作から構成される。ローラ対60/IIIおよび59/IIは予備牽伸領域を形成し、且つ、ローラ対59/IIおよび58、57/Iは主要牽伸領域を形成する。牽伸された繊維スライバは、牽伸システム吐出口52において、ウェブ案内手段61内へと通過すると共に、吐出ローラ34、35によりスライバ・ファネル62を通して引出され、其処で繊維スライバは組み合わされることで繊維スライバ63を形成し、該スライバは次に(不図示の)ケンス内に投入され又はケンス無し繊維スライバ・パッケージの形態である。参照符号Aは動作方向を表す。繊維スライバ63の出口速度は1200m/分以上である。上記各ローラの回転方向は湾曲矢印により表される。
【0021】
図6に依ると、段状プーリ64がシャフト・ジャーナル2aに取付けられる。段状プーリ64の回転は、駆動プーリ9(図1a参照)と一体的に回転すべく該駆動プーリ上に取付けられた段状プーリ66に対して平坦ベルト65により伝達される。平坦ベルト65の再配置により、異なる速度伝達比を形成する。
【0022】
図1aに係る配置構成においても、与えられた直径を有する駆動プーリ3および/または8を、一例として、異なる直径もしくは異なる歯数を有する駆動プーリ3および/または8に置き換えることで、異なる速度伝達比が実施され得る。
【0023】
伝動装置2aは、牽伸変更用の伝動装置(gear)である。駆動プーリ3、8、9、14および/または15を変更することにより、牽伸システム・ローラIIおよびIIIの回転速度の変更が実施され得る。
【0024】
少なくとも一組の第1ローラ対60/IIIおよび/または59/IIの駆動は第1駆動要素5;2a、3により一側から行われ、且つ、少なくとも一組の更なるローラ対57、58/Iの駆動は第2駆動要素6;2b、4により他側から行われるという牽伸システム50の例を用いて、本発明は説明されてきた。本発明は同一様式にて、少なくとも一組の更なるローラ対57、58/Iの駆動は第1駆動要素5;2a、3により一側から行われ、且つ、少なくとも一組のローラ対60/IIIおよび/または59/IIの駆動は第2駆動要素6;2b、4により他側から行われるという牽伸システム52を包含する。このことは、カレンダ・ローラ34、35および巻取器プレート45の駆動に対しても当てはまる。
【0025】
牽伸システム50は、たとえば練篠フレームの場合には複数本の繊維スライバ53を牽伸し得る。牽伸システム50はまた、たとえばカード機(一体的練篠フレーム)の吐出口において、1本のみの繊維スライバも牽伸し得る。
【0026】
本発明に係る上記デバイスに対する練篠フレームは、破断フレームとも称される。該フレームは実際問題として、概略的には均一化(levelling)を行わない予備練篠フレームとして使用される。特に均一化を行わない予備練篠フレームの場合、牽伸に関する比較的に高度の可変性は使用者に必要とはされず、要求事項を遙かに越えるものである。この点において使用者は、自身の紡績計画に従い概略的に、変更されることが極めて希であるという固定的なダブリングおよび牽伸を行い、斯かる一切の変更は専ら固定量だけ行われる。本発明に係る上記デバイスは、牽伸に対応する主要変速機を有する伝動装置構成を有している。本発明は、主要牽伸変速機として、駆動手段および切換え点により最適な伝動機構の解決策を提供する。モータ制御手段に対する牽伸の機械的な伝動装置結合の結果として、装置に関する要件は概ね少なくされ得る。伝動装置全体がひとつのモータ1により駆動される。牽伸は、伝動装置10における主要変速段階により機械的に固定されている。
【0027】
本発明に係る上記デバイスに依れば変速器は、それほど厳密さを必要とせずに自由に駆動制御され得る。これにより、機械的なモータ構成において、モータ1の両側が駆動手段を備えると共に伝動装置10は空間を最適に使用する極めて単純な形態を獲得するという成果が得られる。斯かる構成は特に、2つの駆動側を結合する少なくとも一本の中間シャフトを節約する。これに加え、全体的なベルト案内およびベルト張設が極めて簡素化されている。
【図面の簡単な説明】
【0028】
【図1a】本発明に係る駆動手段を有する練篠フレームの伝動機構レイアウトの概略的平面図である。
【図1b】図1aに係る上記駆動手段の側面図である。
【図1c】図1aに係る上記駆動手段の側面図である。
【図2】2つの案内プーリを備えた入力下側ローラおよび中央下側ローラの駆動手段および変位可能軸受を示す図である。
【図3】図1aと同様であるが、入力下側ローラの駆動および中央下側ローラの駆動が異なる側から行われる構成を示す図である。
【図4】図1aと同様であるが、出力下側ローラおよび吐出ローラに対する共通駆動手段と巻取器プレートに対する駆動手段とを備えた伝動機構レイアウトを示す図である。
【図5】4個の上側ローラと3個の下側ローラとを有するフォー・オーバー・スリー牽伸システムの概略的側面図である。
【図6】いずれもが円錐状プーリとして構成された、第2駆動要素の駆動用駆動プーリと伝動装置の入力部における被動用駆動プーリとを示す図である。
【符号の説明】
【0029】
1 駆動モータ
2a、2b シャフト・ジャーナル(回転駆動要素)
3、4 駆動用駆動プーリ
5 第1駆動要素
6 第2駆動要素
57、58、59、60 上側ローラ
I、II、III 下側ローラ
【特許請求の範囲】
【請求項1】
牽伸ローラ対を構成する牽伸システム・ローラにより少なくとも一本の繊維スライバを牽伸する牽伸システムを有する練篠フレーム、カード機、コーミング機械などの紡績用前処理機上のデバイスであって、上記牽伸システム・ローラを駆動する動力伝達手段を有すると共に駆動モータを有し、上記牽伸システム・ローラの駆動は異なる側から行われるというデバイスにおいて、
上記駆動モータ(1)は2個の回転駆動要素(2a、2b)を有し、少なくとも一組のローラ対(60/III;59/II)の駆動は第1駆動要素(5;2a、3)により一側から行われ、且つ、少なくとも一組の他のローラ対(57、58/I)の駆動は第2駆動要素(6;2b、4)により他側から行われることを特徴とする、デバイス。
【請求項2】
前記駆動要素は、前記駆動モータの外方突出シャフト両端部であることを特徴とする、請求項1記載のデバイス。
【請求項3】
前記シャフト両端部には駆動プーリが夫々取付けられることを特徴とする、請求項1または2に記載のデバイス。
【請求項4】
前記駆動要素は前記駆動モータの回転外壁面であることを特徴とする、請求項1乃至3のいずれか一項に記載のデバイス。
【請求項5】
少なくとも、ひとつの駆動列においては伝動装置が在ることを特徴とする、請求項1乃至4のいずれか一項に記載のデバイス。
【請求項6】
前記伝動装置は前記駆動モータと少なくとも一対の被動ローラとの間に配置されることを特徴とする、請求項1乃至5のいずれか一項に記載のデバイス。
【請求項7】
機械的伝動装置が存在することを特徴とする、請求項1乃至6のいずれか一項に記載のデバイス。
【請求項8】
前記伝動装置はひとつの変速段を有することを特徴とする、請求項1乃至7のいずれか一項に記載のデバイス。
【請求項9】
前記伝動装置は前記駆動モータにより駆動されることを特徴とする、請求項1乃至8のいずれか一項に記載のデバイス。
【請求項10】
前記牽伸ローラおよび/または前記伝動装置の駆動はベルトを経由して行われることを特徴とする、請求項1乃至9のいずれか一項に記載のデバイス。
【請求項11】
前記ベルトは平坦ベルトであることを特徴とする、請求項1乃至10のいずれか一項に記載のデバイス。
【請求項12】
前記ベルトは歯付きベルトであることを特徴とする、請求項1乃至11のいずれか一項に記載のデバイス。
【請求項13】
前記ベルトはベルト張設プーリと組み合わされることを特徴とする、請求項1乃至12のいずれか一項に記載のデバイス。
【請求項14】
機械要素、特に牽伸システム・ローラを駆動する複数個の駆動プーリが在ることを特徴とする、請求項1乃至13のいずれか一項に記載のデバイス。
【請求項15】
各々が少なくとも2個の駆動プーリの回りを通る少なくとも一個の伝動要素、特にベルトが在ることを特徴とする、請求項1乃至14のいずれか一項に記載のデバイス。
【請求項16】
前記駆動プーリの内の少なくとも幾つかの駆動プーリは異なる直径を有することを特徴とする、請求項1乃至15のいずれか一項に記載のデバイス。
【請求項17】
前記牽伸システムの出力ローラ対の駆動は前記第1駆動要素により行われることを特徴とする、請求項1乃至16のいずれか一項に記載のデバイス。
【請求項18】
前記牽伸システムの入力ローラ対および中央ローラ対の駆動は前記第2駆動要素により行われることを特徴とする、請求項1乃至17のいずれか一項に記載のデバイス。
【請求項19】
前記第1駆動要素の駆動用駆動プーリは、前記出力ローラ対の被動用駆動プーリよりも大きな直径を有することを特徴とする、請求項1乃至18のいずれか一項に記載のデバイス。
【請求項20】
前記第2駆動要素の駆動用駆動プーリは前記伝動装置の入力部における被動用駆動プーリよりも小さな直径を有することを特徴とする、請求項1乃至19のいずれか一項に記載のデバイス。
【請求項21】
前記伝動装置の出力部における駆動用駆動プーリは、前記入力ローラ対および中央ローラ対のための被動用駆動プーリよりも小さな直径を有することを特徴とする、請求項1乃至20のいずれか一項に記載のデバイス。
【請求項22】
前記第2駆動要素の前記駆動用駆動プーリおよび前記伝動装置の入力部における前記被動用駆動プーリは、段状プーリとして構成されることを特徴とする、請求項1乃至21のいずれか一項に記載のデバイス。
【請求項23】
予備牽伸ローラ対および主要牽伸ローラ対を構成する牽伸システム・ローラが存在することを特徴とする、請求項1乃至22のいずれか一項に記載のデバイス。
【請求項24】
前記第1駆動要素からはカレンダ・ローラの駆動が導かれることを特徴とする、請求項1乃至23のいずれか一項に記載のデバイス。
【請求項25】
前記第1駆動要素からは回転プレートの駆動が導かれることを特徴とする、請求項1乃至24のいずれか一項に記載のデバイス。
【請求項26】
出力部においては1個の下側ローラが2個の上側ローラと協働することを特徴とする、請求項1乃至25のいずれか一項に記載のデバイス。
【請求項27】
前記入力ローラ対は一側における被動用駆動プーリおよび他側における駆動用駆動プーリを有しており、上記駆動用駆動プーリは前記中央ローラ対を駆動するために使用されることを特徴とする、請求項1乃至26のいずれか一項に記載のデバイス。
【請求項28】
前記中央ローラ対は一側における被動用駆動プーリと他側における駆動用駆動プーリとを有しており、上記駆動用駆動プーリは前記入力ローラ対を駆動するために使用されることを特徴とする、請求項1乃至27のいずれか一項に記載のデバイス。
【請求項29】
前記入力ローラ対および中央ローラ対を駆動するベルトは、少なくとも一個の案内プーリと組み合わされることを特徴とする、請求項1乃至28のいずれか一項に記載のデバイス。
【請求項30】
前記入力ローラ対および中央ローラ対を駆動するベルトは、少なくとも一個の張設プーリと組み合わされることを特徴とする、請求項1乃至29のいずれか一項に記載のデバイス。
【請求項1】
牽伸ローラ対を構成する牽伸システム・ローラにより少なくとも一本の繊維スライバを牽伸する牽伸システムを有する練篠フレーム、カード機、コーミング機械などの紡績用前処理機上のデバイスであって、上記牽伸システム・ローラを駆動する動力伝達手段を有すると共に駆動モータを有し、上記牽伸システム・ローラの駆動は異なる側から行われるというデバイスにおいて、
上記駆動モータ(1)は2個の回転駆動要素(2a、2b)を有し、少なくとも一組のローラ対(60/III;59/II)の駆動は第1駆動要素(5;2a、3)により一側から行われ、且つ、少なくとも一組の他のローラ対(57、58/I)の駆動は第2駆動要素(6;2b、4)により他側から行われることを特徴とする、デバイス。
【請求項2】
前記駆動要素は、前記駆動モータの外方突出シャフト両端部であることを特徴とする、請求項1記載のデバイス。
【請求項3】
前記シャフト両端部には駆動プーリが夫々取付けられることを特徴とする、請求項1または2に記載のデバイス。
【請求項4】
前記駆動要素は前記駆動モータの回転外壁面であることを特徴とする、請求項1乃至3のいずれか一項に記載のデバイス。
【請求項5】
少なくとも、ひとつの駆動列においては伝動装置が在ることを特徴とする、請求項1乃至4のいずれか一項に記載のデバイス。
【請求項6】
前記伝動装置は前記駆動モータと少なくとも一対の被動ローラとの間に配置されることを特徴とする、請求項1乃至5のいずれか一項に記載のデバイス。
【請求項7】
機械的伝動装置が存在することを特徴とする、請求項1乃至6のいずれか一項に記載のデバイス。
【請求項8】
前記伝動装置はひとつの変速段を有することを特徴とする、請求項1乃至7のいずれか一項に記載のデバイス。
【請求項9】
前記伝動装置は前記駆動モータにより駆動されることを特徴とする、請求項1乃至8のいずれか一項に記載のデバイス。
【請求項10】
前記牽伸ローラおよび/または前記伝動装置の駆動はベルトを経由して行われることを特徴とする、請求項1乃至9のいずれか一項に記載のデバイス。
【請求項11】
前記ベルトは平坦ベルトであることを特徴とする、請求項1乃至10のいずれか一項に記載のデバイス。
【請求項12】
前記ベルトは歯付きベルトであることを特徴とする、請求項1乃至11のいずれか一項に記載のデバイス。
【請求項13】
前記ベルトはベルト張設プーリと組み合わされることを特徴とする、請求項1乃至12のいずれか一項に記載のデバイス。
【請求項14】
機械要素、特に牽伸システム・ローラを駆動する複数個の駆動プーリが在ることを特徴とする、請求項1乃至13のいずれか一項に記載のデバイス。
【請求項15】
各々が少なくとも2個の駆動プーリの回りを通る少なくとも一個の伝動要素、特にベルトが在ることを特徴とする、請求項1乃至14のいずれか一項に記載のデバイス。
【請求項16】
前記駆動プーリの内の少なくとも幾つかの駆動プーリは異なる直径を有することを特徴とする、請求項1乃至15のいずれか一項に記載のデバイス。
【請求項17】
前記牽伸システムの出力ローラ対の駆動は前記第1駆動要素により行われることを特徴とする、請求項1乃至16のいずれか一項に記載のデバイス。
【請求項18】
前記牽伸システムの入力ローラ対および中央ローラ対の駆動は前記第2駆動要素により行われることを特徴とする、請求項1乃至17のいずれか一項に記載のデバイス。
【請求項19】
前記第1駆動要素の駆動用駆動プーリは、前記出力ローラ対の被動用駆動プーリよりも大きな直径を有することを特徴とする、請求項1乃至18のいずれか一項に記載のデバイス。
【請求項20】
前記第2駆動要素の駆動用駆動プーリは前記伝動装置の入力部における被動用駆動プーリよりも小さな直径を有することを特徴とする、請求項1乃至19のいずれか一項に記載のデバイス。
【請求項21】
前記伝動装置の出力部における駆動用駆動プーリは、前記入力ローラ対および中央ローラ対のための被動用駆動プーリよりも小さな直径を有することを特徴とする、請求項1乃至20のいずれか一項に記載のデバイス。
【請求項22】
前記第2駆動要素の前記駆動用駆動プーリおよび前記伝動装置の入力部における前記被動用駆動プーリは、段状プーリとして構成されることを特徴とする、請求項1乃至21のいずれか一項に記載のデバイス。
【請求項23】
予備牽伸ローラ対および主要牽伸ローラ対を構成する牽伸システム・ローラが存在することを特徴とする、請求項1乃至22のいずれか一項に記載のデバイス。
【請求項24】
前記第1駆動要素からはカレンダ・ローラの駆動が導かれることを特徴とする、請求項1乃至23のいずれか一項に記載のデバイス。
【請求項25】
前記第1駆動要素からは回転プレートの駆動が導かれることを特徴とする、請求項1乃至24のいずれか一項に記載のデバイス。
【請求項26】
出力部においては1個の下側ローラが2個の上側ローラと協働することを特徴とする、請求項1乃至25のいずれか一項に記載のデバイス。
【請求項27】
前記入力ローラ対は一側における被動用駆動プーリおよび他側における駆動用駆動プーリを有しており、上記駆動用駆動プーリは前記中央ローラ対を駆動するために使用されることを特徴とする、請求項1乃至26のいずれか一項に記載のデバイス。
【請求項28】
前記中央ローラ対は一側における被動用駆動プーリと他側における駆動用駆動プーリとを有しており、上記駆動用駆動プーリは前記入力ローラ対を駆動するために使用されることを特徴とする、請求項1乃至27のいずれか一項に記載のデバイス。
【請求項29】
前記入力ローラ対および中央ローラ対を駆動するベルトは、少なくとも一個の案内プーリと組み合わされることを特徴とする、請求項1乃至28のいずれか一項に記載のデバイス。
【請求項30】
前記入力ローラ対および中央ローラ対を駆動するベルトは、少なくとも一個の張設プーリと組み合わされることを特徴とする、請求項1乃至29のいずれか一項に記載のデバイス。
【図1a】


【図1b】
【図1c】
【図2】
【図3】
【図4】
【図5】
【図6】
【図1b】
【図1c】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−274519(P2008−274519A)
【公開日】平成20年11月13日(2008.11.13)
【国際特許分類】
【出願番号】特願2008−69916(P2008−69916)
【出願日】平成20年3月18日(2008.3.18)
【出願人】(590002323)ツリュツラー ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト (85)
【Fターム(参考)】
【公開日】平成20年11月13日(2008.11.13)
【国際特許分類】
【出願日】平成20年3月18日(2008.3.18)
【出願人】(590002323)ツリュツラー ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト (85)
【Fターム(参考)】
[ Back to top ]