
牽伸機構を有する特に練篠フレーム、カード機、コーミング機などの紡績前処理機上のデバイス
【課題】繋止解除/開き、および、閉じ/繋止の操作を片手のみで実施する。
【解決手段】牽伸機構と、各下側ロールが取付けられた牽伸機構下側部分と、各上側ロールが取付けられた牽伸機構下側部分とを有する、特に練篠フレーム、カード機、コーミング機などの紡績前処理機であって、上記上側部分は(非加重の)開き位置から(加重された)閉じ位置まで且つその逆に移動可能であると共に、上記各上側ロールの押圧デバイスに対して繋止解除/繋止デバイスが配備されるという紡績前処理機上のデバイスにおいて、上記繋止解除/繋止デバイスは、当該片手式操作デバイスによれば、上記牽伸機構の押圧デバイスの繋止解除/開き、および、閉じ/繋止のいずれもが一回の動作段階において行われる。
【解決手段】牽伸機構と、各下側ロールが取付けられた牽伸機構下側部分と、各上側ロールが取付けられた牽伸機構下側部分とを有する、特に練篠フレーム、カード機、コーミング機などの紡績前処理機であって、上記上側部分は(非加重の)開き位置から(加重された)閉じ位置まで且つその逆に移動可能であると共に、上記各上側ロールの押圧デバイスに対して繋止解除/繋止デバイスが配備されるという紡績前処理機上のデバイスにおいて、上記繋止解除/繋止デバイスは、当該片手式操作デバイスによれば、上記牽伸機構の押圧デバイスの繋止解除/開き、および、閉じ/繋止のいずれもが一回の動作段階において行われる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、牽伸機構と、各下側ロールが取付けられた牽伸機構下側部分と、各上側ロールが取付けられた牽伸機構下側部分とを有する、特に練篠フレーム、カード機、コーミング機などの紡績前処理機であって、上記上側部分は(非加重の)開き位置から(加重された)閉じ位置まで且つその逆に移動可能であると共に、上記各上側ロールの押圧デバイスに対して繋止解除/繋止デバイスが配備されるという紡績前処理機上のデバイスに関する。
【背景技術】
【0002】
公知のデバイス(特許文献1)において、動作の間に牽伸機構は加重され、すなわち、上側および下側ロールと、それらの間に配置されたスライバとは、圧力下で相互に接触する。その目的のために、各上側ロール上には圧力手段が取付けられる一方、該圧力手段は加圧アームに対して取付けられ、該加圧アームは繋止デバイスにより牽伸機構に向かう方向に引張られることから、各上側ロールはそれらの関連下側ロール上へと押圧される。上記繋止デバイスは2つの加重フックを有し、各加圧アームに対してひとつの加重フックが割当てられる。上記加重フックは加圧アーム毎のひとつのボルトに係合する結果、上記加重フックに対して及ぼされた張力は、関連する加圧アームに対して伝達される。上記加圧アームが上記繋止デバイスにより解放されたとき、上記加重フックは上記加圧アームに対してもはや張力を及ぼさないことから、該加重フックは上記ボルトから離間枢動するので、上記加圧アームはそのときに離間枢動され得る。上記加圧アームはもはや、牽伸機構ロールに対して何らの力も及ぼさない。そのときに依然として、上記各ロールの加重は、それら自体の重量により行われる。上記加圧アームが上記上側ロールにより上記下側ロールに圧力を及ぼすことを許容する上記繋止デバイスは、制御要素により影響される繋止要素であって、上記加重フックの開き位置から上記加重フックの閉じ位置までの該加重フックの移動を行うという繋止要素から成り、上記ボルトは上記牽伸機構の閉じ状態において常に同一の箇所に位置される。このことは、可能的な調節により上記圧力手段は牽伸機構の各円筒体に対して所定の力を及ぼす、という効果を有する。上記制御要素により付与される力の大きさは、各上側ロールが夫々の下側ロールに対して押圧される力に関して何らの影響も有さない。上記加重フックの位置、故に上記加圧アームの位置は、上記閉じ位置において常に同一である。上記制御要素は、制御バルブに対して接続された空気圧シリンダから成る。一方、上記制御バルブは、コントローラにより制御される。斯かるデバイスにおいては、スプリング操作されると同時に空気圧的に操作される各加重フックを係合させるために、繊維材料の流れ方向(スライバの進行方向)に関して横方向にロッドが配置される。上記公知デバイスは、装備に関して高コストである。また、各々がそれら自体の枢動点を有するという一方における各加重フックおよび他方における各加圧アームは、逆方向に回動される。その配置の不都合は、第1の動作段階においては繊維の進行方向で見て上記加重フックが反時計方向に回動されて上記牽伸機構が先ず別体的な繋止デバイスを用いて繋止解除され、繋止解除の後で第2の動作段階において、各加圧アームは手作業で、個別的に且つ別体的に時計方向に離間枢動される、ということである。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】ドイツ特許公開公報DE195 48 840 A号
【発明の概要】
【発明が解決しようとする課題】
【0004】
故に、本発明の基礎となる課題は、冒頭にて記述された種類のデバイスであって、言及された不都合を回避すると共に、特に、構造的に簡素な様式で、繋止解除/開き、および、閉じ/繋止の操作が片手のみを用いて実施されることを可能にするというデバイスを提供するに在る。
【課題を解決するための手段】
【0005】
上記課題は、請求項1の特徴部分の特徴により解決される。
1番目の発明によれば、牽伸機構と、各下側ロールが取付けられた牽伸機構下側部分と、各上側ロールが取付けられた牽伸機構下側部分とを有する、特に練篠フレーム、カード機、コーミング機などの紡績前処理機であって、上記上側部分は(非加重の)開き位置から(加重された)閉じ位置まで且つその逆に移動可能であると共に、上記各上側ロールの押圧デバイスに対して繋止解除/繋止デバイスが配備されるという紡績前処理機上のデバイスにおいて、上記繋止解除/繋止デバイス(15;15'、15";20、21、22)は、当該片手式操作デバイスによれば、上記牽伸機構(S)の押圧デバイス(11a〜11d;91〜94)の繋止解除および開きが一回の動作段階において行われ、且つ、上記牽伸機構(S)の上記押圧デバイス(11a〜11d;91〜94)の閉じおよび繋止が一回の動作段階において行われるという片手式操作デバイスを提供することを特徴とする、デバイスが提供される。
【0006】
この構成の簡素さは特に、単にアクチュエータを揚動することにより繋止解除および開きが片手で行われ得る、という利点に帰着する。開き用捕捉体および閉じ用捕捉体の組合わせ的な協働によれば、各々の場合において一回のみの動作段階において、同時的な繋止解除/開き、および、閉じ/繋止が許容される。
【0007】
請求項2乃至30は、本発明の好適な発展例を包含する。
2番目の発明によれば、1番目の発明において、前記片手式操作デバイスに依れば、繋止解除および開きが一回の動作段階において連続して行われること、および、閉じおよび繋止が一回の動作段階において連続して行われることが許容される。
3番目の発明によれば、1番目または2番目の発明において、前記牽伸機構は、片手を使用し、繋止解除されると同時に開かれ、且つ、閉じられると同時に繋止される。
4番目の発明によれば、1番目から3番目のいずれかの発明において、前記片手式操作デバイスは、枢動軸心の回りで回動可能な握り柄を有する。
5番目の発明によれば、1番目から4番目のいずれかの発明において、前記繋止解除/繋止デバイス(15)は前記開き/閉じデバイス(29)と組合わせ的に協働する。
6番目の発明によれば、1番目から5番目のいずれかの発明において、前記握り柄は、閉じ位置においては閉じ手段により固定可能であり、且つ、制御アームを操作する。
7番目の発明によれば、1番目から6番目のいずれかの発明において、前記制御アームの回動の経路内へと繋止レバーの駆動器アームが突出する。
8番目の発明によれば、1番目から7番目のいずれかの発明において、前記繋止レバーは、その開始位置に在るとき、回動ラッチの閉じ位置を支持する。
9番目の発明によれば、1番目から8番目のいずれかの発明において、前記繋止解除/繋止デバイスは、開き用捕捉体と、閉じ用捕捉体と、固定位置に在るボルトとを備えて成る。
10番目の発明によれば、1番目から9番目のいずれかの発明において、前記繋止解除/繋止デバイスは、前記開き用捕捉体に対して力を及ぼし得る例えば取手などの握り柄を有する。
11番目の発明によれば、1番目から10番目のいずれかの発明において、前記開き用捕捉体は枢動軸受の回りで枢動可能である。
12番目の発明によれば、1番目から11番目のいずれかの発明において、前記閉じ用捕捉体は枢動軸受の回りで枢動可能である。
13番目の発明によれば、1番目から12番目のいずれかの発明において、前記開き用捕捉体と閉じ用捕捉体との間には張設スプリングが作用する。
14番目の発明によれば、1番目から13番目のいずれかの発明において、前記張設スプリングの一端は前記開き用捕捉体に係合し、且つ、他端は前記閉じ用捕捉体に係合する。
15番目の発明によれば、1番目から14番目のいずれかの発明において、前記開き用捕捉体は、前記閉じ用捕捉体における凹所に対して係合および離脱すべく移動される様に配置された突出部(突起部)に作用する。
16番目の発明によれば、1番目から15番目のいずれかの発明において、開くために、前記枢動的に取付けられた握り柄(アクチュエータ)は、枢動的に取付けられた開き用捕捉体を、閉じ用捕捉体との噛合係合および/または摩擦係合から離脱させる様にも移動させる。
17番目の発明によれば、1番目から16番目のいずれかの発明において、開くために、前記開き用捕捉体と前記閉じ用捕捉体との間のスプリング力は、前記牽伸機構の押圧の間において上記閉じ用捕捉体の同時的な枢動開きを行う。
18番目の発明によれば、1番目から17番目のいずれかの発明において、前記牽伸機構を閉じるために、前記握り柄(アクチュエータ)は端部停止部に対して押圧されるべく配置されることから、前記開き用捕捉体は自由に回動可能である。
19番目の発明によれば、1番目から18番目のいずれかの発明において、閉じ操作の直前において、前記閉じ用捕捉体は、固定位置ボルトの回りに係合すると共に、該閉じ用捕捉体は、噛合係合および/または摩擦係合により前記開き用捕捉体内に係合する如き様式で上記開き用捕捉体を回動させる。
20番目の発明によれば、1番目から19番目のいずれかの発明において、前記ボルトは所定位置に繋止可能である。
21番目の発明によれば、1番目から20番目のいずれかの発明において、各上側ロールには押圧デバイスが割当てられる。
22番目の発明によれば、1番目から21番目のいずれかの発明において、各押圧デバイスは、一本の加圧アームおよび2つの加圧要素を有する。
23番目の発明によれば、1番目から22番目のいずれかの発明において、前記加圧アームは門形フレーム状の構成である。
24番目の発明によれば、1番目から23番目のいずれかの発明において、各加圧アームは、前記加圧要素と一体的に、枢動もしくは旋回軸受の回りに枢動可能または旋回可能である。
25番目の発明によれば、1番目から24番目のいずれかの発明において、前記枢動および旋回軸受は、一方の門形フレーム・アームの下端部に対して割当てられる。
26番目の発明によれば、1番目から25番目のいずれかの発明において、前記繋止解除/繋止デバイスは、他方の門形フレーム・アームの下端部に対して割当てられる。
27番目の発明によれば、1番目から26番目のいずれかの発明において、前記繋止解除/繋止デバイスは、繊維材料の流れ方向(動作方向)に配向される。
28番目の発明によれば、1番目から27番目のいずれかの発明において、前記繋止解除/繋止デバイスは、相次いで配置された前記各加圧アームと並列に配置される。
29番目の発明によれば、1番目から28番目のいずれかの発明において、前記繋止解除/繋止デバイスは、相次いで配置された前記各加圧アームに沿い且つその外側に配置される。
30番目の発明によれば、1番目から29番目のいずれかの発明において、同一の握り柄により操作可能である少なくとも2台の繋止解除/繋止デバイスが配備される。
【0008】
本発明は、図面中に示された好適実施例に関して以下に相当に詳細に説明される。
【図面の簡単な説明】
【0009】
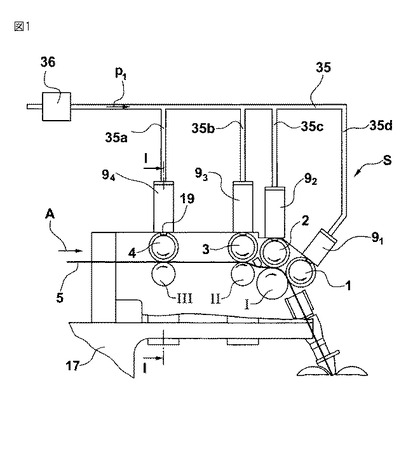
【図1】本発明に係るデバイスに対する練篠フレームの牽伸機構の概略的側面図である。
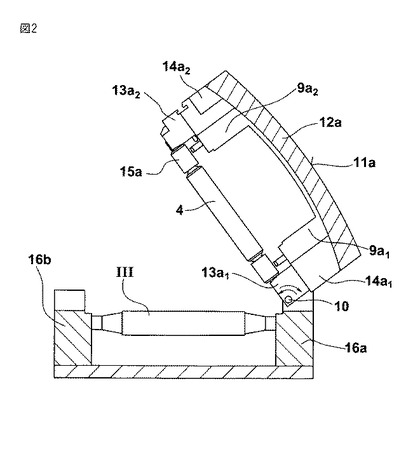
【図2】図1における断面I-Iに従い加圧アームを繋止解除/開き(枢動開き)位置で示す図である。
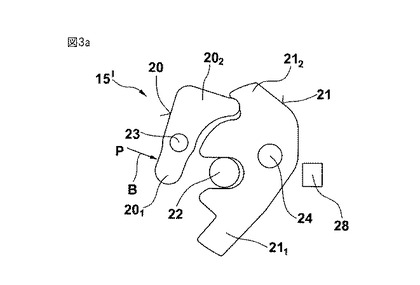
【図3a】繋止/閉じ位置における繋止解除/繋止デバイスを示す図である。
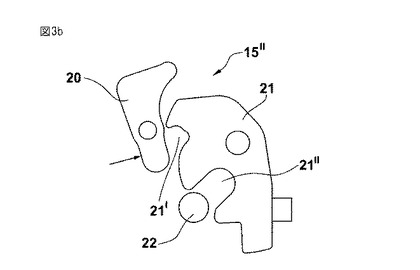
【図3b】繋止解除/開き位置における繋止解除/繋止デバイスを示す図である。
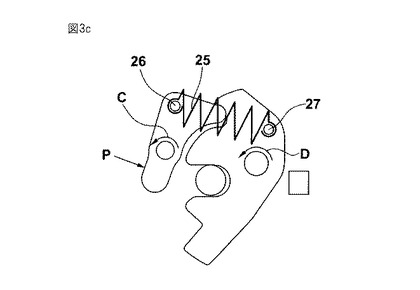
【図3c】繋止/閉じ位置における繋止解除/繋止デバイスを示す図である。
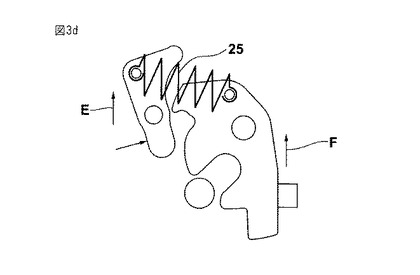
【図3d】繋止解除/開き位置における繋止解除/繋止デバイスを示す図である。
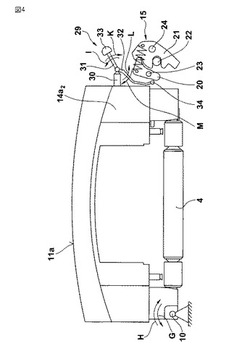
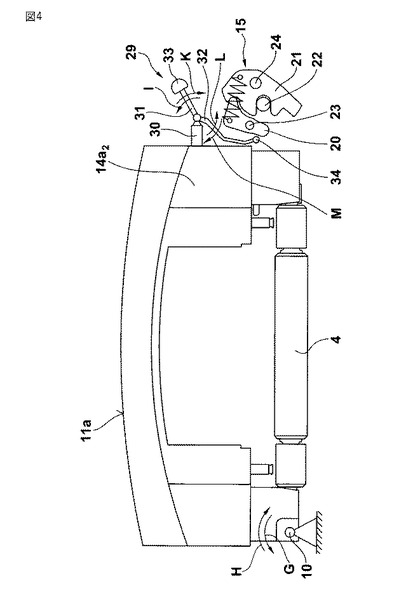
【図4】開き/閉じデバイスと組み合わされた繋止解除/繋止デバイスを示す図である。
【発明を実施するための形態】
【0010】
図1は、たとえばTruetzschler練篠フレームTD 08などの牽伸機構Sを示している。牽伸機構Sはフォー・オーバー・スリー牽伸機構として構成され、すなわち該機構は、3個の下側ロールI、II、III(Iは出力下側ロール、IIは中央下側ロール、IIIは入力下側ロール)と、4個の上側ロール1、2、3、4とから成る。牽伸機構Sにおいては、複数本のスライバから成る繊維束5の牽伸が実施される。牽伸操作は、予備牽伸操作および主要牽伸操作から構成される。ロール対4/IIIおよび3/IIは予備牽伸区域を形成し、ロール対3/IIおよび1、2/Iは主要牽伸区域を形成する。出力下側ロールIは(不図示の)主要モータにより駆動されることから、吐出速度を決定する。入力および中央下側ロールIIIおよびIIは、(不図示の)調整モータにより駆動される。上側ロール1乃至4は、枢動軸受(図2参照)の回りで枢動可能な加圧アーム11a乃至11dであって、その故に摩擦係合により駆動されるという加圧アーム11a乃至11dにおける加圧要素91乃至94(加重デバイス)により下側ロールI、II、IIIに対して加圧される。ロールI、II、III;1、2、3、4の回転方向は、湾曲矢印により表される。複数本のスライバから成る繊維束5は、方向Aに進行する。下側ロールI、II、IIIは、機械フレーム17上に配置されたローラ軸受16a、16b(図2参照)に取付けられる。
【0011】
図2に依ると、上側ロール4は、門形フレーム状の加圧アーム11aであって、2つの側部空気圧シリンダ9a1および9a2(加圧要素)と、共通支持要素12aと、2つの保持要素13a1および13a2と、2つの中間要素14a1および14a2とから成るという加圧アーム11aと組み合わされる。加圧アーム11aは、ローラ軸受16a上に取付けられた枢動軸受10の回りで上側ロール4と共に枢動して開かれる。側面視にて見られるカバー要素13a1および13a2は角度付き(直角とされた)構成であり、カバー要素13a1の一方の角度付きアームは、その自由端部の領域において枢動軸受10上に枢動的に取付けられる。カバー要素13a2の他方の角度付きアームは、その自由端部の領域において繋止デバイス15の一部を有し、該繋止デバイスの閉じ用捕捉体21は、機械フレーム17上で固定位置に取付けられたボルト22に対して係合および離脱すべく移動される様に配置される(図3a乃至図3dを参照)。加圧アーム11aは繋止解除/開き位置で示される。
【0012】
図3a乃至図3dに依ると、繋止機構15は、開き用捕捉体20と、閉じ用捕捉体21と、固定位置におけるボルト22とから成る。開き用捕捉体20および閉じ用捕捉体21は各々が本質的に、枢動継手23、24の回りで夫々回動可能な両頭レバーの形態である。同様に配備されるのは、開き用捕捉体20の一方のレバー・アーム201に対して矢印Bの方向に力Pを付与する取手33である(図4を参照)。開き用捕捉体20は枢動軸受23の回りで枢動すべく取付けられ、閉じ用捕捉体21は枢動軸受24の回りで枢動すべく取付けられる。開き用捕捉体20と閉じ用捕捉体21との間には、張設スプリング25(図3c、図3dを参照)が作用する。張設スプリング25の一端は、開き用捕捉体20のレバー・アーム202上の突出部26に係合し、且つ、他端は、閉じ用捕捉体21のレバー・アーム212上の突出部27に係合する。参照番号28は停止部を表す。
【0013】
図3a、図3cにおいて、繋止手段は閉じ状態で示される。該繋止手段は、開き用捕捉体20に対して図3aに示された方向Bに力Pを付与することにより、解除される。このことは、取手33を前方に傾斜することにより行われる。結果として、図3cに依れば、開き用捕捉体20は枢動継手23の回りで矢印Cに従う反時計方向に回動される。開き用ラッチ20のレバー・アーム202の端部領域上の突起部は、閉じ用捕捉体21の端部領域212における凹所21'を抜け出し、且つ、牽伸機構S(または加圧アーム91乃至94)の開き時に張設スプリング25は、矢印Dに従う反時計方向に閉じ用捕捉体21を回動させ、ボルト22を解放する(図3b、図3d)。同時に、閉じ用捕捉体21における更なる凹所21"は、ボルト22から離間移動する。牽伸機構Sを繋止解除した後で開くと同時に、開き用捕捉体20および閉じ用捕捉体21は夫々、矢印EおよびFの方向にて上方に変位される(図3d)。凹所21'の形状は、一定の圧点効果を有する。
【0014】
閉じおよび繋止のためには、図3a乃至図3dに関して記述された動作段階が逆順で行われる。図3b、図3dに示された繋止解除/開き位置から始まり、繋止解除/繋止デバイス15は図3a、図3cにおける繋止/閉じ位置へと移動され、開き用捕捉体20および閉じ用捕捉体21は、図3dに示された矢印EおよびFの逆の方向において下方に変位される。
【0015】
図4に依れば、繋止解除/繋止デバイス15と組合わせ的に協働する開き/閉じデバイス29が配備される。門形フレーム・アーム14a2上の外部には枢動軸受30が取付けられ、該軸受上には、両頭レバーと同様の案内バー・デバイスの2本のレバー・アーム31、32の各々の一端が枢動的に取付けられ、各レバー・アームは相互に対して堅固に接続されている。レバー・アーム31および32の夫々の他端上には、取手33およびボルト34が夫々取付けられる。取手33が矢印Iの方向に上方に押圧されたとき、ボルト34は矢印Lの方向に移動されて開き用捕捉体20に対して圧力を及ぼすことから(図3d参照)、繋止解除が行われる。同時に、方向Iにおける取手33の移動の結果として、軸受30を経由して、加圧アーム11a全体が枢動軸受10の回りで矢印Hの方向に回動されることから、押圧デバイスもしくは牽伸機構Sは開かれる(図2参照)。
【0016】
枢動継手23および24は(不図示の様式で)門形フレーム・アーム14a2上に取付けられる。その接続の結果として、開き操作の間において、矢印Iの方向における取手33の移動によれば、方向Hにおける開き位置への加圧アーム14aの枢動と、方向EおよびFにおける繋止解除/繋止デバイス15の変位とが一体的に引き起こされる(機械的に結合されている)。対応する様式で、閉じ操作の間において、矢印Kの方向における取手33の移動によれば、方向Gにおける閉じ位置への加圧アーム14aの枢動と、矢印EおよびFの方向とは逆の方向における繋止解除/繋止デバイス15の変位とが一体的に引き起こされる(機械的に結合されている)。
【0017】
本発明に係る上記デバイスの更なる構成および利点は、
所定位置に繋止され得るボルトにより、牽伸機構上側部分の高さを下側部分に対して調節することが可能であること、
上記機構は上昇もされ得るが、構造的に、それは等しく底部に留まることが可能であること、
フックによる解決策が使用されるならば上記開き用捕捉体は省略可能であり;その場合、上記アクチュエータは、枢動的に取付けられたフックであって、行程超過(噛合および摩擦接続、または、摩擦接続)を以て/なしでスプリング負荷された解決策であるというフックを繋止解除するのみであるということ、
緊急の繋止解除が可能であり;上記アクチュエータが不調でも、ネジ回しなどを用いることで上記開き用捕捉体は上記閉じ用捕捉体から外れる様に回動され得ること、
近接スィッチにより上記閉じ用捕捉体を監視することで安全性が確保されること、
である。
【符号の説明】
【0018】
1、2、3、4 上側ロール
5 繊維束
91〜94 加圧要素
9a1、9a2 側部空気圧シリンダ
10 枢動軸受
11a〜11d 加圧アーム
12a 共通支持要素
13a1、13a2 保持要素/カバー要素
14a 加圧アーム
14a1 中間要素
14a2 門形フレーム・アーム
15 繋止解除/繋止デバイス
16a、16b ローラ軸受
17 機械フレーム
20 開き用捕捉体
201、202 レバー・アーム
21 閉じ用捕捉体
21'、21" 凹所
212 レバー・アーム
22 ボルト
23、24 枢動軸受
25 張設スプリング
26、27 突出部
28 停止部
29 開き/閉じデバイス
30 枢動軸受
31、32 レバー・アーム
33 取手
34 ボルト
【技術分野】
【0001】
本発明は、牽伸機構と、各下側ロールが取付けられた牽伸機構下側部分と、各上側ロールが取付けられた牽伸機構下側部分とを有する、特に練篠フレーム、カード機、コーミング機などの紡績前処理機であって、上記上側部分は(非加重の)開き位置から(加重された)閉じ位置まで且つその逆に移動可能であると共に、上記各上側ロールの押圧デバイスに対して繋止解除/繋止デバイスが配備されるという紡績前処理機上のデバイスに関する。
【背景技術】
【0002】
公知のデバイス(特許文献1)において、動作の間に牽伸機構は加重され、すなわち、上側および下側ロールと、それらの間に配置されたスライバとは、圧力下で相互に接触する。その目的のために、各上側ロール上には圧力手段が取付けられる一方、該圧力手段は加圧アームに対して取付けられ、該加圧アームは繋止デバイスにより牽伸機構に向かう方向に引張られることから、各上側ロールはそれらの関連下側ロール上へと押圧される。上記繋止デバイスは2つの加重フックを有し、各加圧アームに対してひとつの加重フックが割当てられる。上記加重フックは加圧アーム毎のひとつのボルトに係合する結果、上記加重フックに対して及ぼされた張力は、関連する加圧アームに対して伝達される。上記加圧アームが上記繋止デバイスにより解放されたとき、上記加重フックは上記加圧アームに対してもはや張力を及ぼさないことから、該加重フックは上記ボルトから離間枢動するので、上記加圧アームはそのときに離間枢動され得る。上記加圧アームはもはや、牽伸機構ロールに対して何らの力も及ぼさない。そのときに依然として、上記各ロールの加重は、それら自体の重量により行われる。上記加圧アームが上記上側ロールにより上記下側ロールに圧力を及ぼすことを許容する上記繋止デバイスは、制御要素により影響される繋止要素であって、上記加重フックの開き位置から上記加重フックの閉じ位置までの該加重フックの移動を行うという繋止要素から成り、上記ボルトは上記牽伸機構の閉じ状態において常に同一の箇所に位置される。このことは、可能的な調節により上記圧力手段は牽伸機構の各円筒体に対して所定の力を及ぼす、という効果を有する。上記制御要素により付与される力の大きさは、各上側ロールが夫々の下側ロールに対して押圧される力に関して何らの影響も有さない。上記加重フックの位置、故に上記加圧アームの位置は、上記閉じ位置において常に同一である。上記制御要素は、制御バルブに対して接続された空気圧シリンダから成る。一方、上記制御バルブは、コントローラにより制御される。斯かるデバイスにおいては、スプリング操作されると同時に空気圧的に操作される各加重フックを係合させるために、繊維材料の流れ方向(スライバの進行方向)に関して横方向にロッドが配置される。上記公知デバイスは、装備に関して高コストである。また、各々がそれら自体の枢動点を有するという一方における各加重フックおよび他方における各加圧アームは、逆方向に回動される。その配置の不都合は、第1の動作段階においては繊維の進行方向で見て上記加重フックが反時計方向に回動されて上記牽伸機構が先ず別体的な繋止デバイスを用いて繋止解除され、繋止解除の後で第2の動作段階において、各加圧アームは手作業で、個別的に且つ別体的に時計方向に離間枢動される、ということである。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】ドイツ特許公開公報DE195 48 840 A号
【発明の概要】
【発明が解決しようとする課題】
【0004】
故に、本発明の基礎となる課題は、冒頭にて記述された種類のデバイスであって、言及された不都合を回避すると共に、特に、構造的に簡素な様式で、繋止解除/開き、および、閉じ/繋止の操作が片手のみを用いて実施されることを可能にするというデバイスを提供するに在る。
【課題を解決するための手段】
【0005】
上記課題は、請求項1の特徴部分の特徴により解決される。
1番目の発明によれば、牽伸機構と、各下側ロールが取付けられた牽伸機構下側部分と、各上側ロールが取付けられた牽伸機構下側部分とを有する、特に練篠フレーム、カード機、コーミング機などの紡績前処理機であって、上記上側部分は(非加重の)開き位置から(加重された)閉じ位置まで且つその逆に移動可能であると共に、上記各上側ロールの押圧デバイスに対して繋止解除/繋止デバイスが配備されるという紡績前処理機上のデバイスにおいて、上記繋止解除/繋止デバイス(15;15'、15";20、21、22)は、当該片手式操作デバイスによれば、上記牽伸機構(S)の押圧デバイス(11a〜11d;91〜94)の繋止解除および開きが一回の動作段階において行われ、且つ、上記牽伸機構(S)の上記押圧デバイス(11a〜11d;91〜94)の閉じおよび繋止が一回の動作段階において行われるという片手式操作デバイスを提供することを特徴とする、デバイスが提供される。
【0006】
この構成の簡素さは特に、単にアクチュエータを揚動することにより繋止解除および開きが片手で行われ得る、という利点に帰着する。開き用捕捉体および閉じ用捕捉体の組合わせ的な協働によれば、各々の場合において一回のみの動作段階において、同時的な繋止解除/開き、および、閉じ/繋止が許容される。
【0007】
請求項2乃至30は、本発明の好適な発展例を包含する。
2番目の発明によれば、1番目の発明において、前記片手式操作デバイスに依れば、繋止解除および開きが一回の動作段階において連続して行われること、および、閉じおよび繋止が一回の動作段階において連続して行われることが許容される。
3番目の発明によれば、1番目または2番目の発明において、前記牽伸機構は、片手を使用し、繋止解除されると同時に開かれ、且つ、閉じられると同時に繋止される。
4番目の発明によれば、1番目から3番目のいずれかの発明において、前記片手式操作デバイスは、枢動軸心の回りで回動可能な握り柄を有する。
5番目の発明によれば、1番目から4番目のいずれかの発明において、前記繋止解除/繋止デバイス(15)は前記開き/閉じデバイス(29)と組合わせ的に協働する。
6番目の発明によれば、1番目から5番目のいずれかの発明において、前記握り柄は、閉じ位置においては閉じ手段により固定可能であり、且つ、制御アームを操作する。
7番目の発明によれば、1番目から6番目のいずれかの発明において、前記制御アームの回動の経路内へと繋止レバーの駆動器アームが突出する。
8番目の発明によれば、1番目から7番目のいずれかの発明において、前記繋止レバーは、その開始位置に在るとき、回動ラッチの閉じ位置を支持する。
9番目の発明によれば、1番目から8番目のいずれかの発明において、前記繋止解除/繋止デバイスは、開き用捕捉体と、閉じ用捕捉体と、固定位置に在るボルトとを備えて成る。
10番目の発明によれば、1番目から9番目のいずれかの発明において、前記繋止解除/繋止デバイスは、前記開き用捕捉体に対して力を及ぼし得る例えば取手などの握り柄を有する。
11番目の発明によれば、1番目から10番目のいずれかの発明において、前記開き用捕捉体は枢動軸受の回りで枢動可能である。
12番目の発明によれば、1番目から11番目のいずれかの発明において、前記閉じ用捕捉体は枢動軸受の回りで枢動可能である。
13番目の発明によれば、1番目から12番目のいずれかの発明において、前記開き用捕捉体と閉じ用捕捉体との間には張設スプリングが作用する。
14番目の発明によれば、1番目から13番目のいずれかの発明において、前記張設スプリングの一端は前記開き用捕捉体に係合し、且つ、他端は前記閉じ用捕捉体に係合する。
15番目の発明によれば、1番目から14番目のいずれかの発明において、前記開き用捕捉体は、前記閉じ用捕捉体における凹所に対して係合および離脱すべく移動される様に配置された突出部(突起部)に作用する。
16番目の発明によれば、1番目から15番目のいずれかの発明において、開くために、前記枢動的に取付けられた握り柄(アクチュエータ)は、枢動的に取付けられた開き用捕捉体を、閉じ用捕捉体との噛合係合および/または摩擦係合から離脱させる様にも移動させる。
17番目の発明によれば、1番目から16番目のいずれかの発明において、開くために、前記開き用捕捉体と前記閉じ用捕捉体との間のスプリング力は、前記牽伸機構の押圧の間において上記閉じ用捕捉体の同時的な枢動開きを行う。
18番目の発明によれば、1番目から17番目のいずれかの発明において、前記牽伸機構を閉じるために、前記握り柄(アクチュエータ)は端部停止部に対して押圧されるべく配置されることから、前記開き用捕捉体は自由に回動可能である。
19番目の発明によれば、1番目から18番目のいずれかの発明において、閉じ操作の直前において、前記閉じ用捕捉体は、固定位置ボルトの回りに係合すると共に、該閉じ用捕捉体は、噛合係合および/または摩擦係合により前記開き用捕捉体内に係合する如き様式で上記開き用捕捉体を回動させる。
20番目の発明によれば、1番目から19番目のいずれかの発明において、前記ボルトは所定位置に繋止可能である。
21番目の発明によれば、1番目から20番目のいずれかの発明において、各上側ロールには押圧デバイスが割当てられる。
22番目の発明によれば、1番目から21番目のいずれかの発明において、各押圧デバイスは、一本の加圧アームおよび2つの加圧要素を有する。
23番目の発明によれば、1番目から22番目のいずれかの発明において、前記加圧アームは門形フレーム状の構成である。
24番目の発明によれば、1番目から23番目のいずれかの発明において、各加圧アームは、前記加圧要素と一体的に、枢動もしくは旋回軸受の回りに枢動可能または旋回可能である。
25番目の発明によれば、1番目から24番目のいずれかの発明において、前記枢動および旋回軸受は、一方の門形フレーム・アームの下端部に対して割当てられる。
26番目の発明によれば、1番目から25番目のいずれかの発明において、前記繋止解除/繋止デバイスは、他方の門形フレーム・アームの下端部に対して割当てられる。
27番目の発明によれば、1番目から26番目のいずれかの発明において、前記繋止解除/繋止デバイスは、繊維材料の流れ方向(動作方向)に配向される。
28番目の発明によれば、1番目から27番目のいずれかの発明において、前記繋止解除/繋止デバイスは、相次いで配置された前記各加圧アームと並列に配置される。
29番目の発明によれば、1番目から28番目のいずれかの発明において、前記繋止解除/繋止デバイスは、相次いで配置された前記各加圧アームに沿い且つその外側に配置される。
30番目の発明によれば、1番目から29番目のいずれかの発明において、同一の握り柄により操作可能である少なくとも2台の繋止解除/繋止デバイスが配備される。
【0008】
本発明は、図面中に示された好適実施例に関して以下に相当に詳細に説明される。
【図面の簡単な説明】
【0009】
【図1】本発明に係るデバイスに対する練篠フレームの牽伸機構の概略的側面図である。
【図2】図1における断面I-Iに従い加圧アームを繋止解除/開き(枢動開き)位置で示す図である。
【図3a】繋止/閉じ位置における繋止解除/繋止デバイスを示す図である。
【図3b】繋止解除/開き位置における繋止解除/繋止デバイスを示す図である。
【図3c】繋止/閉じ位置における繋止解除/繋止デバイスを示す図である。
【図3d】繋止解除/開き位置における繋止解除/繋止デバイスを示す図である。
【図4】開き/閉じデバイスと組み合わされた繋止解除/繋止デバイスを示す図である。
【発明を実施するための形態】
【0010】
図1は、たとえばTruetzschler練篠フレームTD 08などの牽伸機構Sを示している。牽伸機構Sはフォー・オーバー・スリー牽伸機構として構成され、すなわち該機構は、3個の下側ロールI、II、III(Iは出力下側ロール、IIは中央下側ロール、IIIは入力下側ロール)と、4個の上側ロール1、2、3、4とから成る。牽伸機構Sにおいては、複数本のスライバから成る繊維束5の牽伸が実施される。牽伸操作は、予備牽伸操作および主要牽伸操作から構成される。ロール対4/IIIおよび3/IIは予備牽伸区域を形成し、ロール対3/IIおよび1、2/Iは主要牽伸区域を形成する。出力下側ロールIは(不図示の)主要モータにより駆動されることから、吐出速度を決定する。入力および中央下側ロールIIIおよびIIは、(不図示の)調整モータにより駆動される。上側ロール1乃至4は、枢動軸受(図2参照)の回りで枢動可能な加圧アーム11a乃至11dであって、その故に摩擦係合により駆動されるという加圧アーム11a乃至11dにおける加圧要素91乃至94(加重デバイス)により下側ロールI、II、IIIに対して加圧される。ロールI、II、III;1、2、3、4の回転方向は、湾曲矢印により表される。複数本のスライバから成る繊維束5は、方向Aに進行する。下側ロールI、II、IIIは、機械フレーム17上に配置されたローラ軸受16a、16b(図2参照)に取付けられる。
【0011】
図2に依ると、上側ロール4は、門形フレーム状の加圧アーム11aであって、2つの側部空気圧シリンダ9a1および9a2(加圧要素)と、共通支持要素12aと、2つの保持要素13a1および13a2と、2つの中間要素14a1および14a2とから成るという加圧アーム11aと組み合わされる。加圧アーム11aは、ローラ軸受16a上に取付けられた枢動軸受10の回りで上側ロール4と共に枢動して開かれる。側面視にて見られるカバー要素13a1および13a2は角度付き(直角とされた)構成であり、カバー要素13a1の一方の角度付きアームは、その自由端部の領域において枢動軸受10上に枢動的に取付けられる。カバー要素13a2の他方の角度付きアームは、その自由端部の領域において繋止デバイス15の一部を有し、該繋止デバイスの閉じ用捕捉体21は、機械フレーム17上で固定位置に取付けられたボルト22に対して係合および離脱すべく移動される様に配置される(図3a乃至図3dを参照)。加圧アーム11aは繋止解除/開き位置で示される。
【0012】
図3a乃至図3dに依ると、繋止機構15は、開き用捕捉体20と、閉じ用捕捉体21と、固定位置におけるボルト22とから成る。開き用捕捉体20および閉じ用捕捉体21は各々が本質的に、枢動継手23、24の回りで夫々回動可能な両頭レバーの形態である。同様に配備されるのは、開き用捕捉体20の一方のレバー・アーム201に対して矢印Bの方向に力Pを付与する取手33である(図4を参照)。開き用捕捉体20は枢動軸受23の回りで枢動すべく取付けられ、閉じ用捕捉体21は枢動軸受24の回りで枢動すべく取付けられる。開き用捕捉体20と閉じ用捕捉体21との間には、張設スプリング25(図3c、図3dを参照)が作用する。張設スプリング25の一端は、開き用捕捉体20のレバー・アーム202上の突出部26に係合し、且つ、他端は、閉じ用捕捉体21のレバー・アーム212上の突出部27に係合する。参照番号28は停止部を表す。
【0013】
図3a、図3cにおいて、繋止手段は閉じ状態で示される。該繋止手段は、開き用捕捉体20に対して図3aに示された方向Bに力Pを付与することにより、解除される。このことは、取手33を前方に傾斜することにより行われる。結果として、図3cに依れば、開き用捕捉体20は枢動継手23の回りで矢印Cに従う反時計方向に回動される。開き用ラッチ20のレバー・アーム202の端部領域上の突起部は、閉じ用捕捉体21の端部領域212における凹所21'を抜け出し、且つ、牽伸機構S(または加圧アーム91乃至94)の開き時に張設スプリング25は、矢印Dに従う反時計方向に閉じ用捕捉体21を回動させ、ボルト22を解放する(図3b、図3d)。同時に、閉じ用捕捉体21における更なる凹所21"は、ボルト22から離間移動する。牽伸機構Sを繋止解除した後で開くと同時に、開き用捕捉体20および閉じ用捕捉体21は夫々、矢印EおよびFの方向にて上方に変位される(図3d)。凹所21'の形状は、一定の圧点効果を有する。
【0014】
閉じおよび繋止のためには、図3a乃至図3dに関して記述された動作段階が逆順で行われる。図3b、図3dに示された繋止解除/開き位置から始まり、繋止解除/繋止デバイス15は図3a、図3cにおける繋止/閉じ位置へと移動され、開き用捕捉体20および閉じ用捕捉体21は、図3dに示された矢印EおよびFの逆の方向において下方に変位される。
【0015】
図4に依れば、繋止解除/繋止デバイス15と組合わせ的に協働する開き/閉じデバイス29が配備される。門形フレーム・アーム14a2上の外部には枢動軸受30が取付けられ、該軸受上には、両頭レバーと同様の案内バー・デバイスの2本のレバー・アーム31、32の各々の一端が枢動的に取付けられ、各レバー・アームは相互に対して堅固に接続されている。レバー・アーム31および32の夫々の他端上には、取手33およびボルト34が夫々取付けられる。取手33が矢印Iの方向に上方に押圧されたとき、ボルト34は矢印Lの方向に移動されて開き用捕捉体20に対して圧力を及ぼすことから(図3d参照)、繋止解除が行われる。同時に、方向Iにおける取手33の移動の結果として、軸受30を経由して、加圧アーム11a全体が枢動軸受10の回りで矢印Hの方向に回動されることから、押圧デバイスもしくは牽伸機構Sは開かれる(図2参照)。
【0016】
枢動継手23および24は(不図示の様式で)門形フレーム・アーム14a2上に取付けられる。その接続の結果として、開き操作の間において、矢印Iの方向における取手33の移動によれば、方向Hにおける開き位置への加圧アーム14aの枢動と、方向EおよびFにおける繋止解除/繋止デバイス15の変位とが一体的に引き起こされる(機械的に結合されている)。対応する様式で、閉じ操作の間において、矢印Kの方向における取手33の移動によれば、方向Gにおける閉じ位置への加圧アーム14aの枢動と、矢印EおよびFの方向とは逆の方向における繋止解除/繋止デバイス15の変位とが一体的に引き起こされる(機械的に結合されている)。
【0017】
本発明に係る上記デバイスの更なる構成および利点は、
所定位置に繋止され得るボルトにより、牽伸機構上側部分の高さを下側部分に対して調節することが可能であること、
上記機構は上昇もされ得るが、構造的に、それは等しく底部に留まることが可能であること、
フックによる解決策が使用されるならば上記開き用捕捉体は省略可能であり;その場合、上記アクチュエータは、枢動的に取付けられたフックであって、行程超過(噛合および摩擦接続、または、摩擦接続)を以て/なしでスプリング負荷された解決策であるというフックを繋止解除するのみであるということ、
緊急の繋止解除が可能であり;上記アクチュエータが不調でも、ネジ回しなどを用いることで上記開き用捕捉体は上記閉じ用捕捉体から外れる様に回動され得ること、
近接スィッチにより上記閉じ用捕捉体を監視することで安全性が確保されること、
である。
【符号の説明】
【0018】
1、2、3、4 上側ロール
5 繊維束
91〜94 加圧要素
9a1、9a2 側部空気圧シリンダ
10 枢動軸受
11a〜11d 加圧アーム
12a 共通支持要素
13a1、13a2 保持要素/カバー要素
14a 加圧アーム
14a1 中間要素
14a2 門形フレーム・アーム
15 繋止解除/繋止デバイス
16a、16b ローラ軸受
17 機械フレーム
20 開き用捕捉体
201、202 レバー・アーム
21 閉じ用捕捉体
21'、21" 凹所
212 レバー・アーム
22 ボルト
23、24 枢動軸受
25 張設スプリング
26、27 突出部
28 停止部
29 開き/閉じデバイス
30 枢動軸受
31、32 レバー・アーム
33 取手
34 ボルト
【特許請求の範囲】
【請求項1】
牽伸機構と、各下側ロールが取付けられた牽伸機構下側部分と、各上側ロールが取付けられた牽伸機構下側部分とを有する、特に練篠フレーム、カード機、コーミング機などの紡績前処理機であって、上記上側部分は(非加重の)開き位置から(加重された)閉じ位置まで且つその逆に移動可能であると共に、上記各上側ロールの押圧デバイスに対して繋止解除/繋止デバイスが配備されるという紡績前処理機上のデバイスにおいて、
上記繋止解除/繋止デバイス(15;15'、15";20、21、22)は、当該片手式操作デバイスによれば、上記牽伸機構(S)の押圧デバイス(11a〜11d;91〜94)の繋止解除および開きが一回の動作段階において行われ、且つ、上記牽伸機構(S)の上記押圧デバイス(11a〜11d;91〜94)の閉じおよび繋止が一回の動作段階において行われるという片手式操作デバイスを提供することを特徴とする、デバイス。
【請求項2】
前記片手式操作デバイスに依れば、繋止解除および開きが一回の動作段階において連続して行われること、および、閉じおよび繋止が一回の動作段階において連続して行われることが許容されることを特徴とする、請求項1記載のデバイス。
【請求項3】
前記牽伸機構は、片手を使用し、繋止解除されると同時に開かれ、且つ、閉じられると同時に繋止されることを特徴とする、請求項1または2に記載のデバイス。
【請求項4】
前記片手式操作デバイスは、枢動軸心の回りで回動可能な握り柄を有することを特徴とする、請求項1乃至3のいずれか一項に記載のデバイス。
【請求項5】
前記繋止解除/繋止デバイス(15)は前記開き/閉じデバイス(29)と組合わせ的に協働することを特徴とする、請求項1乃至4のいずれか一項に記載のデバイス。
【請求項6】
前記握り柄は、閉じ位置においては閉じ手段により固定可能であり、且つ、制御アームを操作することを特徴とする、請求項1または2に記載のデバイス。
【請求項7】
前記制御アームの回動の経路内へと繋止レバーの駆動器アームが突出することを特徴とする、請求項1乃至6のいずれか一項に記載のデバイス。
【請求項8】
前記繋止レバーは、その開始位置に在るとき、回動ラッチの閉じ位置を支持することを特徴とする、請求項1乃至7のいずれか一項に記載のデバイス。
【請求項9】
前記繋止解除/繋止デバイスは、開き用捕捉体と、閉じ用捕捉体と、固定位置に在るボルトとを備えて成ることを特徴とする、請求項1乃至8のいずれか一項に記載のデバイス。
【請求項10】
前記繋止解除/繋止デバイスは、前記開き用捕捉体に対して力を及ぼし得る例えば取手などの握り柄を有することを特徴とする、請求項1乃至9のいずれか一項に記載のデバイス。
【請求項11】
前記開き用捕捉体は枢動軸受の回りで枢動可能であることを特徴とする、請求項1乃至10のいずれか一項に記載のデバイス。
【請求項12】
前記閉じ用捕捉体は枢動軸受の回りで枢動可能であることを特徴とする、請求項1乃至11のいずれか一項に記載のデバイス。
【請求項13】
前記開き用捕捉体と閉じ用捕捉体との間には張設スプリングが作用することを特徴とする、請求項1乃至11のいずれか一項に記載のデバイス。
【請求項14】
前記張設スプリングの一端は前記開き用捕捉体に係合し、且つ、他端は前記閉じ用捕捉体に係合することを特徴とする、請求項1乃至12のいずれか一項に記載のデバイス。
【請求項15】
前記開き用捕捉体は、前記閉じ用捕捉体における凹所に対して係合および離脱すべく移動される様に配置された突出部(突起部)に作用することを特徴とする、請求項1乃至13のいずれか一項に記載のデバイス。
【請求項16】
開くために、前記枢動的に取付けられた握り柄(アクチュエータ)は、枢動的に取付けられた開き用捕捉体を、閉じ用捕捉体との噛合係合および/または摩擦係合から離脱させる様にも移動させることを特徴とする、請求項1乃至4のいずれか一項に記載のデバイス。
【請求項17】
開くために、前記開き用捕捉体と前記閉じ用捕捉体との間のスプリング力は、前記牽伸機構の押圧の間において上記閉じ用捕捉体の同時的な枢動開きを行うことを特徴とする、請求項1乃至16のいずれか一項に記載のデバイス。
【請求項18】
前記牽伸機構を閉じるために、前記握り柄(アクチュエータ)は端部停止部に対して押圧されるべく配置されることから、前記開き用捕捉体は自由に回動可能であることを特徴とする、請求項1乃至17のいずれか一項に記載のデバイス。
【請求項19】
閉じ操作の直前において、前記閉じ用捕捉体は、固定位置ボルトの回りに係合すると共に、該閉じ用捕捉体は、噛合係合および/または摩擦係合により前記開き用捕捉体内に係合する如き様式で上記開き用捕捉体を回動させることを特徴とする、請求項1乃至18のいずれか一項に記載のデバイス。
【請求項20】
前記ボルトは所定位置に繋止可能であることを特徴とする、請求項1乃至19のいずれか一項に記載のデバイス。
【請求項21】
各上側ロールには押圧デバイスが割当てられることを特徴とする、請求項1乃至20のいずれか一項に記載のデバイス。
【請求項22】
各押圧デバイスは、一本の加圧アームおよび2つの加圧要素を有することを特徴とする、請求項1乃至21のいずれか一項に記載のデバイス。
【請求項23】
前記加圧アームは門形フレーム状の構成であることを特徴とする、請求項1乃至22のいずれか一項に記載のデバイス。
【請求項24】
各加圧アームは、前記加圧要素と一体的に、枢動もしくは旋回軸受の回りに枢動可能または旋回可能であることを特徴とする、請求項1乃至23のいずれか一項に記載のデバイス。
【請求項25】
前記枢動および旋回軸受は、一方の門形フレーム・アームの下端部に対して割当てられることを特徴とする、請求項1乃至24のいずれか一項に記載のデバイス。
【請求項26】
前記繋止解除/繋止デバイスは、他方の門形フレーム・アームの下端部に対して割当てられることを特徴とする、請求項1乃至25のいずれか一項に記載のデバイス。
【請求項27】
前記繋止解除/繋止デバイスは、繊維材料の流れ方向(動作方向)に配向されることを特徴とする、請求項1乃至26のいずれか一項に記載のデバイス。
【請求項28】
前記繋止解除/繋止デバイスは、相次いで配置された前記各加圧アームと並列に配置されることを特徴とする、請求項1乃至27のいずれか一項に記載のデバイス。
【請求項29】
前記繋止解除/繋止デバイスは、相次いで配置された前記各加圧アームに沿い且つその外側に配置されることを特徴とする、請求項1乃至28のいずれか一項に記載のデバイス。
【請求項30】
同一の握り柄により操作可能である少なくとも2台の繋止解除/繋止デバイスが配備されることを特徴とする、請求項1乃至29のいずれか一項に記載のデバイス。
【請求項1】
牽伸機構と、各下側ロールが取付けられた牽伸機構下側部分と、各上側ロールが取付けられた牽伸機構下側部分とを有する、特に練篠フレーム、カード機、コーミング機などの紡績前処理機であって、上記上側部分は(非加重の)開き位置から(加重された)閉じ位置まで且つその逆に移動可能であると共に、上記各上側ロールの押圧デバイスに対して繋止解除/繋止デバイスが配備されるという紡績前処理機上のデバイスにおいて、
上記繋止解除/繋止デバイス(15;15'、15";20、21、22)は、当該片手式操作デバイスによれば、上記牽伸機構(S)の押圧デバイス(11a〜11d;91〜94)の繋止解除および開きが一回の動作段階において行われ、且つ、上記牽伸機構(S)の上記押圧デバイス(11a〜11d;91〜94)の閉じおよび繋止が一回の動作段階において行われるという片手式操作デバイスを提供することを特徴とする、デバイス。
【請求項2】
前記片手式操作デバイスに依れば、繋止解除および開きが一回の動作段階において連続して行われること、および、閉じおよび繋止が一回の動作段階において連続して行われることが許容されることを特徴とする、請求項1記載のデバイス。
【請求項3】
前記牽伸機構は、片手を使用し、繋止解除されると同時に開かれ、且つ、閉じられると同時に繋止されることを特徴とする、請求項1または2に記載のデバイス。
【請求項4】
前記片手式操作デバイスは、枢動軸心の回りで回動可能な握り柄を有することを特徴とする、請求項1乃至3のいずれか一項に記載のデバイス。
【請求項5】
前記繋止解除/繋止デバイス(15)は前記開き/閉じデバイス(29)と組合わせ的に協働することを特徴とする、請求項1乃至4のいずれか一項に記載のデバイス。
【請求項6】
前記握り柄は、閉じ位置においては閉じ手段により固定可能であり、且つ、制御アームを操作することを特徴とする、請求項1または2に記載のデバイス。
【請求項7】
前記制御アームの回動の経路内へと繋止レバーの駆動器アームが突出することを特徴とする、請求項1乃至6のいずれか一項に記載のデバイス。
【請求項8】
前記繋止レバーは、その開始位置に在るとき、回動ラッチの閉じ位置を支持することを特徴とする、請求項1乃至7のいずれか一項に記載のデバイス。
【請求項9】
前記繋止解除/繋止デバイスは、開き用捕捉体と、閉じ用捕捉体と、固定位置に在るボルトとを備えて成ることを特徴とする、請求項1乃至8のいずれか一項に記載のデバイス。
【請求項10】
前記繋止解除/繋止デバイスは、前記開き用捕捉体に対して力を及ぼし得る例えば取手などの握り柄を有することを特徴とする、請求項1乃至9のいずれか一項に記載のデバイス。
【請求項11】
前記開き用捕捉体は枢動軸受の回りで枢動可能であることを特徴とする、請求項1乃至10のいずれか一項に記載のデバイス。
【請求項12】
前記閉じ用捕捉体は枢動軸受の回りで枢動可能であることを特徴とする、請求項1乃至11のいずれか一項に記載のデバイス。
【請求項13】
前記開き用捕捉体と閉じ用捕捉体との間には張設スプリングが作用することを特徴とする、請求項1乃至11のいずれか一項に記載のデバイス。
【請求項14】
前記張設スプリングの一端は前記開き用捕捉体に係合し、且つ、他端は前記閉じ用捕捉体に係合することを特徴とする、請求項1乃至12のいずれか一項に記載のデバイス。
【請求項15】
前記開き用捕捉体は、前記閉じ用捕捉体における凹所に対して係合および離脱すべく移動される様に配置された突出部(突起部)に作用することを特徴とする、請求項1乃至13のいずれか一項に記載のデバイス。
【請求項16】
開くために、前記枢動的に取付けられた握り柄(アクチュエータ)は、枢動的に取付けられた開き用捕捉体を、閉じ用捕捉体との噛合係合および/または摩擦係合から離脱させる様にも移動させることを特徴とする、請求項1乃至4のいずれか一項に記載のデバイス。
【請求項17】
開くために、前記開き用捕捉体と前記閉じ用捕捉体との間のスプリング力は、前記牽伸機構の押圧の間において上記閉じ用捕捉体の同時的な枢動開きを行うことを特徴とする、請求項1乃至16のいずれか一項に記載のデバイス。
【請求項18】
前記牽伸機構を閉じるために、前記握り柄(アクチュエータ)は端部停止部に対して押圧されるべく配置されることから、前記開き用捕捉体は自由に回動可能であることを特徴とする、請求項1乃至17のいずれか一項に記載のデバイス。
【請求項19】
閉じ操作の直前において、前記閉じ用捕捉体は、固定位置ボルトの回りに係合すると共に、該閉じ用捕捉体は、噛合係合および/または摩擦係合により前記開き用捕捉体内に係合する如き様式で上記開き用捕捉体を回動させることを特徴とする、請求項1乃至18のいずれか一項に記載のデバイス。
【請求項20】
前記ボルトは所定位置に繋止可能であることを特徴とする、請求項1乃至19のいずれか一項に記載のデバイス。
【請求項21】
各上側ロールには押圧デバイスが割当てられることを特徴とする、請求項1乃至20のいずれか一項に記載のデバイス。
【請求項22】
各押圧デバイスは、一本の加圧アームおよび2つの加圧要素を有することを特徴とする、請求項1乃至21のいずれか一項に記載のデバイス。
【請求項23】
前記加圧アームは門形フレーム状の構成であることを特徴とする、請求項1乃至22のいずれか一項に記載のデバイス。
【請求項24】
各加圧アームは、前記加圧要素と一体的に、枢動もしくは旋回軸受の回りに枢動可能または旋回可能であることを特徴とする、請求項1乃至23のいずれか一項に記載のデバイス。
【請求項25】
前記枢動および旋回軸受は、一方の門形フレーム・アームの下端部に対して割当てられることを特徴とする、請求項1乃至24のいずれか一項に記載のデバイス。
【請求項26】
前記繋止解除/繋止デバイスは、他方の門形フレーム・アームの下端部に対して割当てられることを特徴とする、請求項1乃至25のいずれか一項に記載のデバイス。
【請求項27】
前記繋止解除/繋止デバイスは、繊維材料の流れ方向(動作方向)に配向されることを特徴とする、請求項1乃至26のいずれか一項に記載のデバイス。
【請求項28】
前記繋止解除/繋止デバイスは、相次いで配置された前記各加圧アームと並列に配置されることを特徴とする、請求項1乃至27のいずれか一項に記載のデバイス。
【請求項29】
前記繋止解除/繋止デバイスは、相次いで配置された前記各加圧アームに沿い且つその外側に配置されることを特徴とする、請求項1乃至28のいずれか一項に記載のデバイス。
【請求項30】
同一の握り柄により操作可能である少なくとも2台の繋止解除/繋止デバイスが配備されることを特徴とする、請求項1乃至29のいずれか一項に記載のデバイス。
【図1】


【図2】
【図3a】
【図3b】
【図3c】
【図3d】
【図4】
【図2】
【図3a】
【図3b】
【図3c】
【図3d】
【図4】
【公開番号】特開2013−44083(P2013−44083A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2012−129736(P2012−129736)
【出願日】平成24年6月7日(2012.6.7)
【出願人】(590002323)ツリュツラー ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト (85)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成24年6月7日(2012.6.7)
【出願人】(590002323)ツリュツラー ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト (85)
【Fターム(参考)】
[ Back to top ]